Embed Size (px)
Citation preview

Masterarbeit
Nr.: AE/03/2007
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Dieselmotor auf einem Motorenprüfstand
eingereicht im Fachbereich Maschinenbau und Kraftfahrzeugtechnik der Westsächsischen
Hochschule Zwickau zur Erlangung des akademischen Grades eines
Master of Science (M.Sc.)
vorgelegt von: Jörg Trautvetter geb. am: 11.08.1973
Studiengang Automotive Engineering
Auftraggeber: Westsächsische Hochschule Zwickau

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
Autorenreferat
In dieser Arbeit wurden die grundlegenden Methoden der Ermittlung von
Drehschwingungen an Kurbelwellen theoretisch und messtechnisch dargestellt. Dazu
wurde an einem Motorenprüfstand ein Fünfzylinder-Dieselmotor mit Messtechnik zur
Winkelgeschwindigkeits- und Zylinderdruckerfassung ausgerüstet. Die Amplituden der
Drehschwingungen wurden mit Hilfe des PAK-Messsystems der Fa. Müller BBM
aufgezeichnet und ausgewertet. Außerdem wurde an einem Vierzylinder-Dieselmotor das
Messsystem „Mehrkadreh“ appliziert und die Torsionsschwingungen der Elastikwelle vom
Motor zur Belastungseinrichtung des Prüfstandes untersucht. Mit Hilfe des Verfahrens der
Halbwertsbreite wurde der modale Dämpfungsgrad der Kurbelwelle des Versuchsmotors
ermittelt.
Abstract In this work, the fundamental methods of the determination of torsional vibrations at
crankshafts were theoretically and meteorologically demonstrated. Thus, at an engine test
stand, a five-cylinder diesel engine was equipped with measuring technique for the angular
speed measuring and cylinder pressure registration. The magnitudes of the torsional
vibrations were noted and evaluated with a PAK measuring system of the company Müller
BBM. In addition, at a four-cylinder diesel engine the measuring system „Mehrkadreh “was
applied, and the torsion vibrations of the elastic shaft from the engine to the tensioning
device of the test stand was scrutinised. With the so called "half width procedure", the
modale attenuation constant of the crankshaft of the experimental engine was determined.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
Selbstständigkeitserklärung
Hiermit erkläre ich, dass ich die vorliegende Masterarbeit selbstständig, ohne fremde Hilfe
und nur unter Verwendung der angegebenen Literatur angefertigt habe. Weiterhin
versichere ich, dass diese Arbeit noch keiner anderen Prüfungskommission vorgelegen
hat.
Zwickau im August 2007 Jörg Trautvetter

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
Inhaltsverzeichnis Bilderverzeichnis .................................................................................................................. I
Tabellenverzeichnis.............................................................................................................V
Anlagenverzeichnis ............................................................................................................VI
Kurzzeichenverzeichnis.....................................................................................................VII
Vorwort ...............................................................................................................................XI
1 Einleitung..........................................................................................................................1
2 Stand der Forschung und Technik....................................................................................2
3 Präzisierung der Aufgabenstellung...................................................................................5
4 Literaturstudium................................................................................................................7
4.1.1 Grundlagen..........................................................................................................7
4.1.2 Periodische Schwingungen ...............................................................................10
4.1.3 Resonanz ..........................................................................................................11
4.1.4 Dämpfung..........................................................................................................12
4.2 Software...................................................................................................................17
4.2.1 MathCAD...........................................................................................................17
4.2.2 Visual Basic.......................................................................................................17
4.2.3 AutoCAD ...........................................................................................................17
4.2.4 Catia V5.............................................................................................................18
4.3 Messsystem und Software .......................................................................................18
4.3.1 PAK- Prüfstand-Akustik-System........................................................................18
4.3.2 Mehrkadreh .......................................................................................................19
5 Theoretische Ermittlung der Torsionsschwingformen und
Eigenfrequenzen der Kurbelwelle ...........................................................................19
5.1 Anregung .................................................................................................................20
5.1.1 Massenkrafterregung.........................................................................................21
5.1.2 Gaskrafterregung...............................................................................................24
5.1.3 Tangentialkraft...................................................................................................26
5.1.4 Ersatzerregerkräfte............................................................................................30
5.2 Torsionsschwingungsdämpfer .................................................................................34
5.3 Zweimassenschwungrad..........................................................................................37
5.4 Torsionseigenfrequenzen und Eigenschwingungen.................................................42
5.4.1 Gümbel-Holzer-Tolle-Methode ..........................................................................43

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
5.4.2 Matrizen-Methode..............................................................................................47
5.5 Resonanzschaubilder der unterschiedlichen Bildwellen...........................................53
5.6 Ermittlung von Dämpfungskennwerten ....................................................................55
6 Prüfstandsaufbau ...........................................................................................................56
7 Versuchsdurchführung....................................................................................................59
7.1 Messung Tilgermasse TSD......................................................................................68
7.2 Messung freies Ende KW.........................................................................................71
7.3 Messung Primärmasse Schwungrad........................................................................74
7.4 Messung Sekundärmasse Schwungrad...................................................................77
7.5 Messung Elastikwelle (Vierzylinder-Dieselmotor) ....................................................79
8 Darstellung und Auswertung der Ergebnisse..................................................................86
9 Zusammenfassung .........................................................................................................94
Literaturverzeichnis ...........................................................................................................96
Anlagen

- I -
Bilderverzeichnis
Bild 1: Rotationsvibrometer Fa. Polytec [1]..........................................................................4
Bild 2: Systemaufbau Rotationsvibrometer [1].....................................................................5
Bild 3: Einfacher Torsionsschwinger....................................................................................8
Bild 4: Periodische Schwingung [22] .................................................................................10
Bild 5: Sinusschwingung [22].............................................................................................10
Bild 6: Vergrößerungsfunktion V in Abhängigkeit des
Abstimmverhältnisses bei unterschiedlichen Dämpfungsgraden D.......................11
Bild 7: Verlauf des Schwingwinkels über der Drehzahl unterschiedlicher
Ordnungen und Resonanzschaubild über der Drehzahl [9] ..................................16
Bild 8: Torsionsbruch an einem Hubzapfen [9] ..................................................................20
Bild 9: Bildwelle, Ausgangsmodell, Massenträgheitsmomente und
Torsionssteifigkeiten .............................................................................................20
Bild 10: Schematische Darstellung des ungeschränkten Kurbeltriebes [2]........................21
Bild 11: Darstellung der Kolbenbeschleunigung für einen Kolben in
Abhängigkeit vom Kurbelwinkel bei unterschiedlichen Drehzahlen,
λP=0,33 .................................................................................................................23
Bild 12: Darstellung der osz. Massenkraft eines Kolbens in Abhängigkeit
vom Kurbelwinkel bei unterschiedlichen Drehzahlen, λP=0,33 .............................23
Bild 13: Kurbelstern und Kurbelwelle (schematisch) des 2,5l-Fünfzylinder-
Dieselmotors .........................................................................................................24
Bild 14: Darstellung der Kolbenwege für alle Zylinder .......................................................25
Bild 15: Zylinderdruckverläufe für Zylinder 1 bei unterschiedlichen
Drehzahlen und Variation von Nulllast (NL) und Volllast (VL)...............................26
Bild 16: Verlauf der Massentangentialkraft für eine Zylindereinheit bei
unterschiedlichen Drehzahlen...............................................................................27
Bild 17: Harmonische Zerlegung des Massentangentialkraftverlaufes bei
unterschiedlichen Drehzahlen...............................................................................28
Bild 18: Verlauf von Tangentialkräfte und Zylinderdruck über dem
Kurbelwinkel bei 2500 U/min (VL).........................................................................29
Bild 19: Zerlegung des Gastangentialkraftverlaufes bei 2500 U/min (VL) .........................30
Bild 20: Spezifische Ersatzerregerkräfte 2500 U/min (VL).................................................31
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

- II -
Bild 21: Richtungssterne der erregenden harmonischen Drehkräfte [2] ............................32
Bild 22: Zeichnerische Ermittlung der resultierenden Vektorsummen R
für die zweite bis achte Eigenschwingformax
...........................................................33
Bild 23: Ersatzerregerkräfte Dx . Rax für die dritte bis achte
Eigenschwingform bei 2500 U/min (VL)...............................................................34
Bild 24: Dreifadenpendel, Tischausführung [27] ................................................................35
Bild 25: Schnittmodell Torsionsschwingungsdämpfer, 3D-Modell Torsions-
schwingungsdämpfer ............................................................................................35
Bild 26: Virtuell tordierte Gummispur des TSD ..................................................................37
Bild 27: schematischer Aufbau des ZMS [10] ....................................................................38
Bild 28: Systemskizze konventionelle Kupplung/Zweimassenschwungrad
[21]........................................................................................................................39
Bild 29: Drehzahländerung und relativer Verdrehwinkel zwischen Primär-
und Sekundärseite des ZMS aus [10] ...................................................................40
Bild 30: Verlauf der gemessenen relativen Verdrehwinkel zwischen
Primär- und Sekundärseite des ZMS mit 30 Nm Belastung über
der Drehzahl .........................................................................................................41
Bild 31: Verlauf der gemessenen relativen Verdrehwinkel zwischen
Primär- und Sekundärseite des ZMS bei max. Drehmoment über
der Drehzahl .........................................................................................................41
Bild 32: Bildwelle, versteifte Wellenabschnitte...................................................................44
Bild 33: Verlauf des Resterregermomentes R gemäß Ausgangsbildwelle.........................46
Bild 34: Eigenschwingformen für die Ausgangsbildwelle...................................................47
Bild 35: Torsionsschwingerkette mit freigeschnittener i-ten Drehmasse............................48
Bild 36: Bildwelle, um TSD und ZMS erweitertes Modell ...................................................50
Bild 37: Bildwelle, um TSD, ZMS, Elastikwelle und Bremse erweitertes
Modell ...................................................................................................................51
Bild 38: Eigenschwingformen der Bildwelle mit ZMS, TSD und
Belastungseinheit..................................................................................................52
Bild 39: Modellierte Kurbelkröpfung in Anlehnung an die Ausgangsdaten
gemäß Anlage 1....................................................................................................53
Bild 40: Resonanzschaubild der Ausgangsbildwelle..........................................................54
Bild 41: Resonanzschaubild der Bildwelle mit ZMS und TSD............................................54
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
- III -
Bild 42: Resonanzschaubild der Bildwelle mit ZMS, TSD und
Belastungseinrichtung...........................................................................................55
Bild 43: Kenngrößen zur Ermittlung des Dämpfungsgrades mit dem
Verfahren der Halbwertsbreite [7] .........................................................................56
Bild 44: Motorenprüfstand, aufgebaut mit Motor und Belastungseinrichtung.....................57
Bild 45: Messstellen Elastikwelle GKN 228.40 ..................................................................57
Bild 46: Prinzipdarstellung Induktionssensor, kleine Drehzahl (violett) und
große Drehzahl (grün) [19]....................................................................................59
Bild 47: Abtastung äquidistanter Winkelintervalle bei gleichförmiger und
ungleichförmiger Drehbewegung ..........................................................................60
Bild 48: Maximale Winkelabweichung der Zahnscheibe TSD............................................62
Bild 49: Messeinstellung PAK-Messsystem.......................................................................65
Bild 50: Karteikarte FFT-Parameter PAK-Messsystem......................................................67
Bild 51: Karteikarte Ordnungs-Parameter PAK-Messsystem.............................................67
Bild 52: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl
(oben) und Resonanzschaubild (unten), TSD, NL ................................................69
Bild 53: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl
(oben) und Resonanzschaubild (unten), TSD, VL.................................................70
Bild 54: Drehwinkelgeber am freien Ende der Kurbelwelle................................................71
Bild 55: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl
(oben) und Resonanzschaubild (unten), frEKW, NL .............................................72
Bild 56: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl
(oben) und Resonanzschaubild (unten), frEKW, VL .............................................73
Bild 57: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl
(oben) und Resonanzschaubild (unten), PSR, NL ................................................75
Bild 58: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl
(oben) und Resonanzschaubild (unten), PSR, VL ................................................76
Bild 59: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl
(oben) und Resonanzschaubild (unten), SSR, NL ................................................78
Bild 60: Darstellung der Drehzahl und des Wechseldrehmomentes bei
einem Drehzahlrunterlauf des Vierzylinder-Dieselmotors von n =
1000 U/min bis n = 0 U/min...................................................................................82
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
- IV -
Bild 61: Verlauf der Drehmomente mit überlagerten
Wechseldrehmomenten der Elastikwelle über fünf KW-
Umdrehungen bei VL, unterschiedliche Drehzahlen .............................................83
Bild 62: Startvorgang des Vierzylinder-Dieselmotors,
Wechseldrehmomente und Drehzahl des Motors .................................................84
Bild 63: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl
(oben) und Resonanzschaubild (unten), AEla, 30 Nm Belastung .........................85
Bild 64: berechnetes Resonanzschaubild für das
Torsionsschwingungssystem Dieselmotor-Motorenprüfstand...............................86
Bild 65: aus Messergebnissen der Drehschwingungsmessungen
entwickeltes Resonanzschaubild ..........................................................................87
Bild 66: Resonanzschaubild, gemessene Eigenkreisfrequenzen (rot) und
berechnete Eigenkreisfrequenzen (grau)..............................................................88
Bild 67: Spezifische Ersatzerregerkräfte bei 2900 U/min (VL) ...........................................89
Bild 68: Ersatzerregerkräfte Dx . Rax für die dritte bis achte
Eigenschwingform bei 2900 U/min (VL)...............................................................89
Bild 69: Spezifische Ersatzerregerkräfte bei 3450 U/min (VL) ...........................................90
Bild 70: Ersatzerregerkräfte Dx . Rax für die dritte bis achte
Eigenschwingform bei 3450 U/min (VL)...............................................................90
Bild 71: Prüfstand Fünfzylinder-Dieselmotor mit PAK MKII Messsystem ..........................91
Bild 72: Verlauf der Verdrehwinkel der Messstellen frEKW, TSD, PSR bei
n =2900 U/min (VL)...............................................................................................93
Bild 73: Verlauf der Verdrehwinkel der Messstellen frEKW, TSD, PSR bei
n =3435 U/min (VL)...............................................................................................93
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

- V -
Tabellenverzeichnis
Tabelle 1: Ausgewählte Software-Systeme zur Fahrzeugentwicklung ................................3
Tabelle 2: Kennwerte 2,5l-Fünfzylinder-Dieselmotor ...........................................................6
Tabelle 3: Konstruktionsdaten des Kurbeltriebs ..................................................................6
Tabelle 4: Elemente der Modelldarstellung von Schwingungssystemen .............................9
Tabelle 5: Methoden zur Ermittlung von Dämpfungskennwerten [6] .................................14
Tabelle 6: Dämpfungsgrade ausgewählter Materialien [6].................................................15
Tabelle 7: Relative Schwingungsamplituden der Kurbelkröpfungen und die
daraus ermittelten Beträge der resultierenden Vektorsumme Rax.........................32
Tabelle 8: Eigenschaften des Torsionsschwingungsdämpfers ..........................................36
Tabelle 9: Messstellen Motor.............................................................................................58
Tabelle 10: Messprogramm...............................................................................................63
Tabelle 11: Ermittelte Dämpfungsgrade D bei unterschiedlichen
Eigenkreisfrequenzen ω, Messstelle TSD.............................................................71
Tabelle 12: Ermittelte Dämpfungsgrade D bei unterschiedlichen
Eigenkreisfrequenzen ω, Messstelle frEKW..........................................................74
Tabelle 13: Ermittelte Dämpfungsgrade D bei unterschiedlichen
Eigenkreisfrequenzen ω, Messstelle PSR.............................................................74
Tabelle 14: Technische Daten Elastikwelle GKN 228.30...................................................79
Tabelle 15: Ermittelte Eigenkreisfrequenzen und Dämpfungsgrade..................................92
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

- VI -
Anlagenverzeichnis
Anlage 1: Ausgangsdaten 2,5l-Fünfzylinder-Dieselmotor
Anlage 2: Zeichnungen
Anlage 3: Makros, Visual Basic
Anlage 4: Harmonische Analyse des Verlaufes der Gastangentialkraft bei
unterschiedlichen Drehzahlen und unterschiedlichen
Lastzuständen, Darstellung der spezifischen Ersatzerregerkräfte
Anlage 5: Grenzwert nach Neuber und Eigenkreisfrequenzen nach
Gümbel-Holzer-Tolle-Mothode für die Ausgangsbildwelle,
Restwertdiagramm
Anlage 6: Ermittlung der Eigenkreisfrequenzen mit Matrizenmethode, für
die Ausgangsbildwelle
Anlage 7: Ermittlung der Eigenkreisfrequenzen mit Matrizenmethode, für
die Bildwelle gemäß Ausgangszustand, modifiziertes Modell, um
TSD, ZMS erweitert
Anlage 8: Ermittlung der Eigenkreisfrequenzen mit Matrizenmethode, für
die Bildwelle gemäß Ausgangszustand, modifiziertes Modell, um
TSD, ZMS und Elastikwelle erweitert
Anlage 9: Errechnete Dämpfungsgrade aus Drehschwingungsmessungen
mit dem PAK-Messsystem am Fünfzylinder-Dieselmotor
Anlage 10: Versuchsanleitung
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
- VII -
Kurzzeichenverzeichnis
Formelzeichen Einheit Erläuterung
A - Amplitude
A - Koeffizient
A m2 Fläche
a m/s2 Beschleunigung
bT Nms Dämpfungskonstante
c N/m Federkonstante
cT Nm/rad Torsionsfedersteifigkeit
D - Dämpfungsgrad
F N Kraft
f 1/s Frequenz
fAbtast 1/s Abtastfrequenz
FD N Dämpfungskraft
FG N Gaskraft
FGt N Gastangentialkraft
fmax 1/s max. Frequenz
Fmosz N oszillierende Massenkraft
Fmt N Massentangentialkraft
FR N Reibkraft
J kgm2 Massenträgheitsmoment
j - imaginäre Einheit
k N/mm2 Dämpfungsbeiwert
K1 [-] Betriebsfaktor der Kraftmaschine 2,5
(Vierzylinder-Dieselmotor)
K2 [-] Betriebsfaktor der Arbeitsmaschine 3,5
(Motorenprüfsand)
lP m Pleuellänge
m kg Masse
Md [Nm] Motordrehmoment
Mk Nm Erregermoment
mK kg Kolbenmasse (komplett)
mmess - Anzahl Messstufen
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

- VIII -
Formelzeichen Einheit Erläuterung mosz kg oszillierende Masse
mP kg Pleuelmasse
mPosz kg oszillierender Anteil Pleuelmasse
mProt kg rotatorischer Anteil Pleuelmasse
Mt Nm Torsionsmoment
ngem U/min im gemessenen Resonanzschaubild
ermittelte Resonanzdrehzahl
nmax U/min größte untersuchte Drehzahl
nmin U/min kleinste untersuchte Drehzahl
p Pa Druck
pZylinder Pa Zylinderdruck
q - momentane Auslenkung einer mechanischen
Kenngröße; Elongation
q - Amplitude einer mechanischen Kenngröße
r m Radius
R Nm Resterregermoment
s m Weg
sK m Kolbenweg
T s Periodendauer
t s Zeit
Terf [Nm] erforderliches Nenndrehmoment der
Elastikwelle
tF stheoretische Periodendauer für einen
Zahnabstand
tmess s Messzeit für Rampenhochlauf
V - Vergrößerung
v m/s Geschwindigkeit
x - Ordnung
xH - hauptkritische Ordnung
Z - Zähnezahl
z - Zylinderzahl
ϕ& rad/s 1. Ableitung des Winkels nach der Zeit,
Winkelgeschwindigkeit
ϕ&& rad/s2 2. Ableitung des Winkels nach der Zeit,
Winkelbeschleunigung
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

- IX -
Formelzeichen Einheit Erläuterung ∆n U/min Drehzahlschrittweite
∆Ord - Ordnungsauflösung
∆tF s absolute zeitliche Abweichung der
Periodendauer
∆tZ20. s theoretische Periodendauer für einen
Zahnabstand, 20. Ordnung der Drehzahl
∆tZi s Zeitdifferenz zwischen zwei Sensorimpulsen
∆σz rad äquidistantes Winkelintervall der
Zahnscheiben
∆ω rad/s absolute Abweichung der
Winkelgeschwindigkeit
Ω rad/s Winkelgeschwindigkeit
α rad Nullphasenwinkel
α °KW Grad Kurbelwinkel
δ 1/s Abklingkonstante
ϕ rad Winkel
λp - Pleuelstangenverhältnis
µ Ns/m3 Dämpfungsbeiwert
σF rad mit max. Fehler behaftetes Winkelintervall
ω rad/s Winkelgeschwindigkeit
ωm rad/s ermittelte Eigenkreisfrequenz
ω0 rad/s Eigenkreisfrequenz
Indizes Erläuterung
A Anfang
B Ende
i Zählindex
K Kolben
k Erreger
max maximal
u untere
z Zahn
1,2 Zählgröße
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
- X -
Abkürzungen Bedeutung
dxf data exchange format (Dateiformat)
FEM Finite Element Methode
HF Hochfrequenz
KW Kurbelwelle
Laser Light Amplification by Stimulated Emission of
Radiation
MTM Massenträgheitsmoment
NL Nulllast
NW Nockenwelle
osz. oszillierend
OT oberer Totpunkt
RAM Random Access Memory
TSD Torsionsschwingungsdämpfer
UT unterer Totpunkt
VL Volllast
WHZ Westsächsische Hochschule Zwickau
ZMS Zweimassenschwungrad
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

- XI -
Vorwort
Die vorliegende Arbeit entstand während meiner Tätigkeit als Ingenieur in der
„GAF - Gesellschaft für Akustik und Fahrzeugmeßwesen mbH Zwickau“ und als Student
an der Westsächsischen Hochschule Zwickau (WHZ) im Studiengang „Master of Science
Automotive Engineering“.
Die Aufgabe „Theoretische und experimentelle Analyse des Torsionsschwingungssystems
Dieselmotor auf einem Motorprüfstand“ wurde im Rahmen eines Masterprojektes von der
WHZ ausgegeben und befasst sich mit der Untersuchung von Drehschwingungen an
Kurbelwellen und deren quantitativen Bewertung. Die Arbeit entstand von Anfang 2007 bis
Mitte 2007.
Meinen verehrten Lehrern, Herrn Prof. Dr.-Ing. W. Foken und Herrn Prof. Dr.-Ing. habil.
W. Hoffmann, danke ich besonders für die Förderung meiner wissenschaftlichen Tätigkeit,
für die konstruktiven Anregungen zu dieser Arbeit und das mir entgegengebrachte
Vertrauen. Herrn Dipl.-Ing. D. Grundke, Geschäftsführer der GAF mbH Zwickau, danke ich
für die kritische Durchsicht der Arbeit und die konstruktiven Hinweise.
Ausdrücklich bedanken möchte ich mich bei Herrn Dr.-Ing. H. Falke, GAF mbH Zwickau,
und allen Mitarbeitern des Instituts für Kraftfahrzeugtechnik an der WHZ für die stets gute
Zusammenarbeit.
Mein besonderer Dank gilt meinen Eltern.
Zwickau im Sommer 2007 Jörg Trautvetter
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Einleitung - 1 -
1 Einleitung
Für die Kraftfahrzeuge des begonnenen 21. Jahrhunderts stellen
Verbrennungskraftmaschinen nach dem Otto- bzw. Dieselprinzip immer noch den
Hauptteil der Antriebe dar. Trotz des formal gleichen Prinzips der Gewinnung von
mechanischer Energie aus chemischer Energie sind die Entwicklungstendenzen im
Automobilbau in Richtung Komfort, Massereduzierung, Sicherheit und
Emissionsverringerung verschoben. Es werden die Bauteile nicht nur nach ihrer statischen
Belastbarkeit dimensioniert. Häufige Ursache für das Versagen einzelner Bauteile sind
Schwingungsvorgänge. Als in diesem Sinne hoch belastetes Bauteil gilt die Kurbelwelle
moderner, direkt einspritzender Dieselmotoren. Wegen der hohen Zylinderdrücke
einerseits und der infolge großer Drehzahlen entstehenden Massenkräfte andererseits
werden enorme Torsionsmomente in die Kurbelwelle eingetragen.
Um die entstehenden Belastungen beziffern zu können, wurden die theoretischen
Grundlagen erörtert und Versuche am Prüfstand durchgeführt. Abschließend wurden die
Ergebnisse der Prüfstandsmessungen mit den Rechenwerten verglichen. Aus den
Ergebnissen der Messungen konnte die Dämpfung der vorliegenden Kurbelwelle ermittelt
werden.
Diese Arbeit soll in Zukunft Grundlage für einen Praktikumsversuch „Drehschwingungen
an Kurbelwellen“ für Studenten der Kraftfahrzeugtechnik an der WHZ werden.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Stand der Forschung und Technik - 2 -
2 Stand der Forschung und Technik
Bei der Herstellung von Motoren für Pkw werden in erster Linie betriebswirtschaftliche
Aspekte zur Beurteilung der Konstruktion herangezogen. Doch selbst der Betriebswirt
erkennt, dass sich mittelfristig Kraftfahrzeuge mit berstenden Kurbelwellen nicht verkaufen
lassen. Deshalb werden umfangreiche theoretische und praktische Untersuchungen an
Kurbelwellen vorgenommen. Um Kosten und Zeitaufwand zu senken, werden seit ca. 20
Jahren Konstruktionsprogramme mit angeschlossenem Postprozessor zur Berechnung
von Torsion, Biegung und Dämpfung an Bauteilen eingesetzt. Die vorausgesagten
Eigenschaften müssen am Prüfstand nachgewiesen werden. Es werden die theoretisch
und praktisch gewonnenen Erkenntnisse verglichen und die theoretischen iterativ an die
Versuchsergebnisse angepasst. Der Erfolg der Konstruktion hängt maßgeblich von der
Qualität der Kommunikation der einzelnen Entwicklungsabteilungen ab. Im Ergebnis
wurden mit verbesserter Konstruktion, dem Einsatz hochfester Stähle und neuen
Fertigungsverfahren die Kurbelwellen leichter und trotzdem steifer. Die
Massenträgheitsmomente des gesamten Triebwerks werden durch den Leichtbau
ebenfalls verringert.
Dem vordergründigen Aspekt der Verbrauchsreduzierung bei gleichzeitigem Steigern der
Leistung wird mit Hilfe von Reibungsverminderung, Prozessverbesserung und dem
Einsatz von Elektronik Rechnung getragen. Im Ergebnis dieser Maßnahmen werden die
Belastungen der einzelnen Bauteile vergrößert. So wird die Kurbelwelle durch
niedrigviskoses Öl (geringe Dämpfung an Lagerstellen), reibungsarme
Kolben/Zylinderpaarung, hohe Drücke im Brennraum, den großen Ungleichförmigkeitsgrad
des Verbrennungsmotors und das breite nutzbare Drehzahlband besonders hoch
belastetet.
Mit den vorangegangenen Überlegungen wäre der ideale Personenkraftwagen der Zukunft
ein Fahrzeug mit kleiner Masse, potentem Motor und dynamischem Fahrwerk. Doch
wegen des Komfortanspruches und dem Statussymboldenken des Käufers und den
verfehlten Entwicklungstendenzen im Automobilbau wird mittelfristig mit keiner deutlichen
Verringerung des Flottenverbrauches zu rechnen sein. Vielmehr müssen die
Zusatzmassen, entstanden infolge des Einsatzes schwerer Dämpfungsmaterialien in der
Fahrgastzelle, elektrischen Unterstützungen für den Fahrer und Multimediaanwendungen Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Stand der Forschung und Technik - 3 -
mit Hilfe von Leichtbau und intelligenten Systemlösungen kompensiert werden. In Bezug
auf die Entwicklung von Kurbelwellen ist der Einsatz von Zweimassenschwungrädern
(ZMS) und Torsionsschwingungsdämpfern (TSD) heute unabdingbar.
Der Ingenieur muss neben den unumgänglichen Office-Anwendungen unterschiedliche
Programmsysteme zur Berechnung/Konstruktion beherrschen, wobei deren theoretische
Hintergründe für ihn nicht tiefgründig bekannt sein müssen. Der Ingenieur muss den
Ergebnissen seiner Berechnung kritisch gegenüberstehen und diese mit Ergebnissen von
Prüfstandsversuchen abgleichen (Fitting). Für die Problematik der
Schwingungsberechnung und -messung existiert am Markt eine unüberschaubare Anzahl
an Fertiglösungen. Von der Weitsicht und dem dargelegten Investitionsgeschick hängt das
Gelingen der geforderten Lösungen für die Aufgaben ab. Einige Software-Systemlösungen
sind in Tabelle 1 dargestellt.
Tabelle 1: Ausgewählte Software-Systeme zur Fahrzeugentwicklung
Konstruktion Berechnung Prüfstand
AutoCAD Fa.
autodesk ABAQUS Fa. ABAQUS PAK Fa. Müller BBM
I-DEAS Fa. UGS ANSYS FA. CADFEM PUMA Fa. AVL
Catia Fa. Dassault
Systems MathCAD Fa. Mathsoft ARTEMIS Fa. HEADacoustics
Pro/E Fa. PTC Matlab Fa. The
MathWorks SQO Fa. GAF
solid works Fa. Dassault
Systems SIMPACK Fa. Intec KISS Fa. IAV
ironcad Fa.
Warmuth Sysnoise Fa. LMS Pulse Fa. Brüel & Kjaer
Für die Untersuchung von Drehschwingungen werden z. Zt. sowohl invasive als auch
nichtinvasive Messtechniken angewandt. Bei den invasiven Methoden trägt das rotierende
Messobjekt eine Komponente des Messsystems. Die Signale werden mit Hilfe von HF-
Fernmesstechniken oder Schleifringen in ein raumfestes Koordinatensystem überführt.
Vorteile ergeben sich durch den Einsatz auch in geschlossenen Gehäusen und in optisch
ungünstigen Medien (Ölnebel). Nachteilig wirken sich der große Aufwand für den
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Stand der Forschung und Technik - 4 -
Versuchsaufbau und die Störanfälligkeit dieser Systeme1 aus. Berührungslose Sensoren,
wie in Laser-Interferometern eingesetzt, können dagegen auch in räumlich beengten
Aufbauten montiert werden, lediglich die Zugänglichkeit des Lasermessstrahls muss
gewährleistet sein. Die interferometrische Messung ist kontinuierlich und daher in der
Winkelauflösung nicht beschränkt. Der variable Arbeitsabstand ermöglicht auch eine
schnelle Neuausrichtung des Sensors, so dass mehrere Positionen ohne Unterbrechung
mit guter Genauigkeit gemessen werden können.
Für die Drehschwingungsuntersuchung von Kurbelwellen ist derzeitig der Einsatz von
Rotationsvibrometern Stand der Technik. Das Rotationsvibrometer, Serie 4000 der Fa.
Polytec (Bild 1), besteht aus dem OFV-400 Messkopf und dem OFV-4000 Controller. Der
optische Messkopf enthält ein kompaktes Doppel-Interferometer mit großer optischer
Empfindlichkeit, das auch hochauflösende Messungen auf nicht vorbehandelten
Oberflächen ermöglicht.
Bild 1: Rotationsvibrometer Fa. Polytec [1]
Die vom Messkopf kommenden Signale werden im OFV-4000 Controller verarbeitet,
dessen Bandbreite groß genug ist, um auch schnelle transiente Vorgänge wie das
plötzliche Beschleunigen einer Welle bei Lastwechseln zu erfassen. Das
Rotationsvibrometer nutzt zwei parallele Laserstrahlen, die auf die rotierende Oberfläche
des Messobjektes treffen. Die reflektierten Strahlen sind in Abhängigkeit von der
1 System: „Unter System versteht man das Zusammenwirken von Komponenten zur Gewährleistung einer
definierten Funktion. Im Unterschied zu einem Modul sind diese Komponenten nicht zwangsläufig in einer
Baueinheit integriert. [MTZ/ATZ Special System Partners 6/2000 S. 12]
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Präzisierung der Aufgabenstellung - 5 -
Oberflächengeschwindigkeit des Messobjektes um den aus dem Doppler-Effekt2
entstandenen Betrag frequenzverschoben. Mit Hilfe einer einfachen geometrischen
Beziehung lässt sich aus der Differenz der beiden Geschwindigkeitskomponenten die
Rotationsgeschwindigkeit des Messobjekts ableiten (Bild 2).
Bild 2: Systemaufbau Rotationsvibrometer [1]
Auf den Einsatz eines Rotationsvibrometers musste nach Anfrage an Fa. Polytec auf
Grund der geforderten Leihgebühr und der schwachen finanziellen Lage der WHZ
verzichtet werden.
3 Präzisierung der Aufgabenstellung
Ziel dieser Arbeit ist die Analyse der Torsionsschwingungsvorgänge der Kurbelwelle eines
Audi 2,5l-Fünfzylinder-Dieselmotors (Tabelle 2) in Verbindung mit der Belastungs-
einrichtung. Dazu werden geeignete Berechnungsgrundlagen und Messverfahren
erarbeitet. Anhand der theoretischen Vorbetrachtungen werden Methoden zur Ermittlung
der Schwingungseigenschaften der Kurbelwelle des oben genannten Motors erarbeitet. Es
sollen die Dämpfungseigenschaften der Kurbelwelle, des Torsionsschwingungsdämpfers
(TSD) und des Zweimassenschwungrades (ZMS) sowohl experimentell als auch
rechnerisch ermittelt werden.
2 Doppler-Effekt: Wenn sich Sender und Empfänger einer akustischen oder elektromagnetischen Welle
gegeneinander bewegen, so wird gegenüber der wahren Frequenz bei Annäherung eine größere und bei
Auseinanderbewegung eine kleinere Frequenz beobachtet.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Präzisierung der Aufgabenstellung - 6 -
Tabelle 2: Kennwerte 2,5l-Fünfzylinder-Dieselmotor
Eigenschaft Bezeichnung/Wert
Motor/ Modell 2.5 TDI
Motor-Kennbuchstabe AEL
Fertigungszeitraum 9.94 - 7.97
Hubraum cm3 2460
Leistung kW bei U/min 103/4000
Drehmoment Nm bei U/min 290/1900
Betriebsdrehzahlbereich U/min 800 - 4200
Bohrung mm 81,0
Hub mm 95,5
Verdichtung 20,5
Kraftstoff Dieselkraftstoff, handelsüblich
Einspritzung Direkteinspritzung
Zündfolge 1-2-4-5-3
Die konstruktiven Daten liegen für den zu untersuchenden Kurbeltrieb nur teilweise vor
und sind in Tabelle 3 aufgeführt.
Tabelle 3: Konstruktionsdaten des Kurbeltriebs
Konstruktionsdetail Wert
Pleuellänge l [mm]P 144
Pleuelmasse m [g]P 680
oszillierender Anteil Pleuelmasse m [g]Posz 195
rotatorischer Anteil Pleuelmasse m [g]Prot 485
Kolbenmasse (komplett) m [g]K 826
oszillierende Masse m [g]osz 1021
Kurbelradius r [mm] 47,75
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Literaturstudium - 7 -
Das Pleuelstangenverhältnis λP ist wie folgt definiert:
PP l
r=λ . (Gl. 1)
r [mm] Kurbelradius
lp [mm] Pleuellänge
Mit den Konstruktionsdaten wird das Pleuelstangenverhältnis zu λP = 0,33 berechnet.
4 Literaturstudium
An Kurbelwellen wurden in den letzten Jahren umfangreiche Untersuchungen
durchgeführt. Die gewonnenen Erkenntnisse sind in [2], [3], [4], [5], [6], [7], [8] und [9]
angegeben. Da die physikalischen Grundlagen für das Problem „Drehschwingung“
bekannt sind, sind auch die Lösungen in den oben genannten Literaturstellen ähnlich,
lediglich die Verständlichkeit der unterschiedlichen Werke differiert. Für die zu
untersuchende Kurbelwelle wurde deshalb auf [2], [3], [6], [7], [8] und [9] zurückgegriffen
und die Herangehensweise auf den vorliegenden Fall übertragen.
4.1.1 Grundlagen
Die sich bewegenden Teile an realen Maschinen unterliegen in ihren mechanischen
Kenngrößen (Kräfte, Wege, Geschwindigkeiten) zeitlichen Änderungen. Diese werden als
Schwingung bezeichnet. Dabei wird in periodische Schwingungen (umlaufende Unwucht,
Massenkräfte des Kolbens an Tauchkolbenmaschinen) und nicht periodische
Schwingungen (Stöße, Anregung des Fahrwerks z.B. infolge von Wegunebenheiten)
unterschieden [22]. Für die Betrachtung der Torsionsschwingungsvorgänge der
Kurbelwelle werden vornehmlich Schwingungsmodelle mit periodischen Änderungen der
mechanischen Kenngrößen zur Beschreibung benötigt.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Literaturstudium - 8 -
In Bild 3 ist das Modell eines einfachen, ungedämpften Torsionsschwingers dargestellt.
Bild 3: Einfacher Torsionsschwinger
Aus dem Momentengleichgewicht ergibt sich die Bewegungsgleichung:
0cJ T =ϕ⋅+ϕ⋅ && (Gl. 2)
J [kgm2] Massenträgheitsmoment
ϕ&& [rad/s2] Winkelbeschleunigung
cT [Nm/rad] Torsionssteifigkeit
ϕ [rad] Winkel
Die Eigenkreisfrequenz ω0 für Torsionsschwinger ist:
Jc T
0 =ω . (Gl. 3)
0ω [rad/s] Eigenkreisfrequenz
Die Form der Bewegungsgleichung für einfache, ungedämpfte Schwinger lautet:
020 =ϕ⋅ω+ϕ&& . (Gl. 4)
Die Form der Bewegungsgleichung für einfache, gedämpfte Schwinger lautet:
020 =ϕ⋅ω+ϕ⋅δ+ϕ &&& . (Gl. 5)
δ [1/s] Abklingkonstante
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Literaturstudium - 9 -
Dabei ist die Abklingkonstante δ:
T
20T
cb ω⋅
=δ (Gl. 6)
bT [Nms] Dämpfungskonstante
und
0D2 ω⋅⋅=δ . (Gl. 7)
D [-] Dämpfungsgrad
Die Form der Bewegungsgleichung für einfache, gedämpfte Schwinger mit periodischer
Erregung lautet:
( )tsinqD2 200 Ω⋅=ϕ⋅ω+ϕ⋅ω+ϕ &&& . (Gl. 8)
q [-] Amplitude
Ω [rad/s] Kreisfrequenz
t [s] Zeit
Mit den o. g. Gleichungen und den mechanischen Eigenschaften des Systems lassen sich
die Schwingungen beschreiben. Die Modellbildung von mechanischen
Schwingungssystemen erfolgt mit den in Tabelle 4 dargestellten Elementen.
Tabelle 4: Elemente der Modelldarstellung von Schwingungssystemen
Element Art des Einflusses auf das System Mechanische Kenngrößen
Masse,
Massenträgheitsmoment Speicher für kinetische Energie
m [kg]
J [kgm2]
Feder Speicher für potenzielle Energie c [N/m]
cT [Nm/rad]
Dämpfer Umwandlung von mechanischer
Energie in Wärmeenergie
k [Ns/m]
bT [Nms]
µ [Ns/m3]
Kräfte/ Momente Erregung/Energiezufuhr in das
Schwingungssystem
F [N]
Mt [Nm]
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Literaturstudium - 10 -
4.1.2 Periodische Schwingungen
Bei periodischen Schwingungen besitzt die mechanische Schwingungsgröße q(t) nach der
Periodendauerdauer T die gleiche Amplitude.
( ) (tqTtq =+ ) (Gl. 9)
q [-] momentane Elongation
T [s] Periodendauer
Bild 4: Periodische Schwingung [22]
Die Sinusschwingung stellt die einfachste periodische Schwingung dar. Sie kann als
Projektion eines mit konstanter Winkelgeschwindigkeit ω umlaufenden Zeigers der Länge
interpretiert werden [22]. q
Bild 5: Sinusschwingung [22]
Mit den in Bild 5 dargestellten Parametern lässt sich die Sinusschwingung wie folgt
beschreiben:
( α+ω⋅= tsinq)t(q ) (Gl. 10)
α [rad] Nullphasenwinkel
und gleichwertig gilt:
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Literaturstudium - 11 -
( ) ( tsinAtcosA)t(q 21 ω⋅+ω⋅= ). (Gl. 11)
A1, A2 [-] Koeffizienten
22
21 AAq += (Gl. 12)
2
1
AAtan =α (Gl. 13)
4.1.3 Resonanz
Als Resonanz wird die Übereinstimmung von Eigenfrequenz eines Schwingungssystems
mit der Anregungsfrequenz dieses Systems bezeichnet. Bei kleiner Dämpfung kumuliert
die eingetragene Energie und führt zwangsläufig zum Versagen des Systems
(Resonanzkatastrophe). Die Resonanzüberhöhung ist umso größer, je größer die
Anregung bzw. je kleiner die Dämpfung ist.
0
2
4
6
8
10
0 1 2 3Abstimmverhältnis [-]
Verg
röße
rung
[-]
D=0,01D=0,05D=0,1D=0,5D=0,7
Bild 6: Vergrößerungsfunktion V in Abhängigkeit des Abstimmverhältnisses bei
unterschiedlichen Dämpfungsgraden D
Für Kurbelwellen von Personenkraftfahrzeugen wird im Allgemeinen von
Dämpfungsgraden zwischen D = 0,05 und D = 0,1 ausgegangen. Es ergibt sich somit eine
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Literaturstudium - 12 -
zu erwartende Resonanzüberhöhung von V ≈ 5….10. Der Zusammenhang von
Eigenkreisfrequenz ω0, Anregungsfrequenz Ω und Dämpfungsgrad D ist in folgender
Gleichung dargestellt:
2
0
22
0
)(D4)(1(
1V
ϖΩ
⋅⋅+ϖΩ
−
= . (Gl. 14)
4.1.4 Dämpfung
Alle in der Natur vorkommenden dynamischen Vorgänge sind gedämpft. Dämpfung ist die
irreversible Umwandlung von mechanischer Energie des Schwingungssystems in andere
Energieformen. Dabei tritt hauptsächlich Reibung auf. Es wird in innere Reibung und
äußere Reibung unterschieden. Die innere Reibung entsteht in geschlossenen Systemen
(Dämpfungskraft und Reaktionskraft innerhalb der Systemgrenze). Äußere Reibung
(Reaktionskraft außerhalb der Systemgrenze) entsteht durch Interaktion von
unterschiedlichen Körpern. Grundsätzlich wird der Bewegung Energie entzogen und
vornehmlich in Wärme umgewandelt. Die innere Dämpfung führt zu einer Vergrößerung
der Bauteiltemperatur und kann zu thermischen Schäden an Bauteilen führen.
Torsionsschwingungsdämpfer von Fahrzeugen besitzen oftmals Dämpfungselemente aus
Gummi. Bei fehlerhafter Auslegung führt die innere Dämpfung des Gummielementes
häufig zum thermischen Versagen des Torsionsschwingungsdämpfers und zwangsläufig
zum Bruch der Kurbelwelle.
Für die Dämpfungskraft sind die folgenden Ansätze gebräuchlich [5].
Coulomb´sche Reibung:
qqFF RD &
&= (Gl. 15)
Viskose Dämpfung:
qbFD&⋅= (Gl. 16)
Komplexe Dämpfung:
qbjF *D ⋅⋅= (Gl. 17)
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
Literaturstudium - 13 -
Frequenzunabhängige Dämpfung:
Ω⋅
=qbF
*
D
& (Gl. 18)
Hysterese-Dämpfung:
)q(signqq1FF
2
RD&⎟⎟
⎠
⎞⎜⎜⎝
⎛−⋅= (Gl. 19)
Wegen der guten Abbildung der Dämpfungsvorgänge und der mathematisch einfachen
Anwendung des viskosen Dämpfungsansatzes wird dieser am häufigsten zur
Beschreibung der Dämpfungskraft verwendet.
Die Ermittlung der Dämpfungsfaktoren kann messtechnisch und mit Hilfe von
theoretischen Ansätzen erfolgen. Bei technischen Systemen wird vorzugsweise auf die
Ermittlung der Dämpfungskennwerte mit Hilfe der in Tabelle 5 dargestellten Methoden
zurückgegriffen.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Literaturstudium - 14 -
Tabelle 5: Methoden zur Ermittlung von Dämpfungskennwerten [6]
Für die Dämpfung des Kurbeltriebes sind unterschiedliche Mechanismen verantwortlich. In
[8] wurden die Ursachen der Dämpfung der Torsionsschwingungen untersucht. Es wurde
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Literaturstudium - 15 -
nachgewiesen, dass für diese die Ölverdrängung im Zwischenspalt der Lagerstellen
infolge der dynamischen Verlagerung der Zapfen verantwortlich ist. Die Dämpfungen der
Reibpaarung Kolben/Zylinder sind von untergeordneter Bedeutung. Das ist
nachvollziehbar, denn die Torsionsschwingwege der Kurbelwelle sind klein. Auch die
riemengekoppelten Nebenantriebe und die innere Dämpfung des Materials der
Kurbelwelle haben kaum einen Einfluss auf die Gesamtdämpfung des Kurbeltriebes. Als
Anstoß für weitere Untersuchungen soll folgende Frage dienen: „Wie wirken sich
reibungsarme Rollenlager im Kurbeltrieb auf die Torsionsschwingungsamplituden aus?“.
Trotzdem ist es hilfreich, den Dämpfungsgrad einiger Materialien für eine
Überschlagsrechnung abschätzen zu können (Tabelle 6). Erschwerend kommt hinzu, dass
die innere Dämpfung von technischen Stoffen praktisch nicht linear ist. Sie ist vielmehr von
der Größe der Belastung, Schwinggeschwindigkeit und der Temperatur abhängig.
Tabelle 6: Dämpfungsgrade ausgewählter Materialien [6]
Material Dämpfungsgrad
Maschinenstahl D=0,0008
hochfeste Stähle D=0,0003…0,0015
Baustahl D=0,0025
Grauguss D=0,01…0,05
Antriebsstränge, Maschinengestelle D=0,02…0,08
Beton D=0,01…0,1
Gummifedern D=0,08…0,12
Für die Abschätzung des Dämpfungsgrades eines Kurbeltriebes ist in [6] die folgende
Gleichung angegeben:
. (Gl. 20)
µ [Ns/m3] Dämpfungsbeiwert
AK [m2] Kolbenfläche
2KT rAb ⋅⋅µ=
223T m0023,0m00515,0
mNs35000b ⋅⋅=
Damit wird die Dämpfungskonstante zu bT=0,41 Nms berechnet. Letztendlich kann der
Dämpfungsgrad D aus folgender Gleichung bestimmt werden:
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Literaturstudium - 16 -
T
0T
c2b
D⋅
ω⋅= (Gl. 21)
und mit cT aus:
SR/55/44/33/22/11/TSDT c1
c1
c1
c1
c1
c1
c1
+++++= . (Gl. 22)
Mit der Gesamttorsionsfedersteifigkeit aus den Einzelfedersteifigkeiten (Bild 9)
cT = 76500 Nm/rad und mit der ersten Eigenkreisfrequenz ω0 = 1946 rad/s wird
D = 0,0053 berechnet. Der berechnete Wert ist mindestens eine Zehnerpotenz kleiner als
der zu erwartende Wert. Die Richtigkeit der Eingabedaten ist somit fraglich.
Aus [9] wurde der Verlauf des Schwingwinkels über der Motordrehzahl entnommen. Mit
und 6. Ordnung
in Bild 7 der Dämpfungsgrad D = 0,05 für die erste Eigenfrequenz ermittelt. Dieser
„Bilderbuch-Verlauf“ soll als Referenz für die Qualität der Prüfstandsmessungen an der
WHZ genutzt werden.
Hilfe des Verfahrens der Halbwertsbreite wurde aus den Graphen der 4,5.
Bild 7: Verlauf des Schwingwinkels über der Drehzahl unterschiedlicher Ordnungen und
Resonanzschaubild über der Drehzahl [9] Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Literaturstudium - 17 -
4.2 Softwa
Für die Bearbeitung der Aufgabe war es unumgänglich, sich mit Programmsystemen zur
erechnung und Simulation auseinanderzusetzen. Es wurde auf
Ressourcen der WHZ zurückgegriffen.
igenkreisfrequenzen und Eigenschwingformen der Kurbelwelle wurden mit MathCAD
in einfaches, schnell erlernbares Ingenieurwerkzeug zur
Datenvisualisierung und -auswertung. Mit Hilfe eines Visual Basic Makros3 werden die
übertragenen Daten aus dem Messsystem „Mehrkadreh“ als ASCII-Code in MS-Excel
eingelesen. Es wird die mit Hilfe von Messungen bestimmte Gastangentialkraft und die
berechnete Massentangentialkraft einer Fourier4-Analyse unterzogen.
4.2.3 AutoCAD
AutoCAD ist ein in der Automobilindustrie weit verbreitetes Programm zur 2D-
Konstruktion. Es wurden Hilfsmittel und Zahnscheiben konstruiert. Diese wurden per dxf-
Export an ein Fertigungsunternehmen übergeben und gefertigt. Die Zeichnungen sind in
Anlage 2 angefügt.
re
Konstruktion, B
4.2.1 MathCAD
MathCAD ist eine Industriestandard-Rechensoftware. Die Rechenfähigkeiten von
MathCAD reichen vom Addieren von Werten einer Zahlenspalte über die Berechnung von
Integralen und Ableitungen bis hin zur Lösung von Gleichungssystemen. Die
E
berechnet.
4.2.2 Visual Basic
Visual Basic ist e
3 Makro: eigenständige Programme zum Anpassen von Windows- Anwendungsprogrammen an die
speziellen Anforderungen des Nutzers.
es von Pierre-Simon Laplace.
4 Jean Baptiste Joseph Fourier (* 21. März 1768 bei Auxerre; † 16. Mai 1830 in Paris) war ein französischer
Mathematiker und Physiker und Neffe zweiten Grad
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Literaturstudium - 18 -
4.2.4 Catia V5
Catia V5 R12 wird in der Automobilindustrie vornehmlich zur 3D-Konstruktion verwendet.
Mit Hilfe des implementierten Postprozessors können Simulationen durchgeführt werden.
Mit Hilfe von Catia V5 wurde das Modell des Torsionsschwingungsdämpfers und einer
Kurbelkröpfung erstellt.
4.3 Messsystem und Software
technische Untersuchungen und akustische Analysen. Es lässt sich universell
für alle gängigen Aufnehmer konfigurieren und leicht an die jeweilige Messaufgabe
op kommuniziert mit dem Messfrontend über Standard-Ethernet (10
oder 100 Mbit/s). Dabei übernimmt dieser Rechner die Online-Anzeige der Messdaten, die
vollständiger Datenkompatibilität zu bestehenden UNIX- und Windows- basierenden PAK
- modulare Technik: Möglich sind 2-, 3-, 4-, 6- und 10-Slot-Ausführungen mit mehr
als 100 Messkanälen sowie der phasensynchrone Betrieb mehrerer Frontends zusammen.
Die synchronisierte Vernetzung von bis zu acht Systemen ist möglich.
- Aufgrund der Konstruktion kann je nach Anzahl der Slots auf einen Lüfter, der
s
4.3.1 PAK- Prüfstand-Akustik-System
PAK-Mobil MK II ist ein kompaktes, mobiles, mehrkanaliges Messsystem für
schwingungs
anpassen. Ein Lapt
Kanalaussteuerung, die Synchronisation von Messungen zu Drehzahlen sowie die
Analyse und Auswertung der Messdaten. Die wichtigsten Eigenschaften im Überblick sind:
- mobiler Einsatz: gekennzeichnet durch geringe Masse, kleine Leistungsaufnahme,
Robustheit, Flexibilität und Erweiterbarkeit - stets bei gleicher Bedienungsoberfläche sowie
VXI-Systemen
- hochauflösender Tachoeingang: 50 MHz-Zähler - ein wichtiger Aspekt bei der
Ordnungsanalyse und bei Drehschwingungsuntersuchungen
ensible Mikrofonaufnahmen beeinflussen könnte, verzichtet werden.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 19 -
4.3.2 Mehrkadreh
im schnellen RAM des Mikroprozessors. Aufgrund der begrenzten
Speicherkapazität von 16 KB sind je nach Anzahl der Messstellen nur wenige
gsvorganges bis zum Speicherüberlauf zu erfassen.
Das Messsystem eignet sich also zur Erfassung von stationären Vorgängen
Computer erfolgt mit der
Übertragungssoftware „datra“ der Firma GAF mbH. Die übertragenen Zeitrohdaten werden
nterschiedliche Schwingungsarten auf, zum Beispiel Torsionsschwingungen
den Anfangsjahren der Automobilentwicklung gehörten Kurbelwellenbrüche zu den
n der Kurbelwelle. So besaß
in 2l-Achtzylinder-Reihenmotor (Bugatti Typ 35A Rennwagen) Ende der 1920er Jahre
timmt gelagert. Die
reiheitsgrade des Gesamtsystems sind im Allgemeinen so groß, dass eine Berechnung
hen heute für die
Bearbeitung von Schwingungsproblemen vielfältige Rechenprogramme zur Verfügung. Die
Konstruktion kann somit vor der Versuchsphase schwingungstechnisch optimiert werden.
Für Drehschwingungsmessungen von mehr als zwei Kanälen wurde an der WHZ das
Komplettsystem „Mehrkadreh“ entwickelt. Kernstück des Messsystems ist ein
Mikroprozessor C167 der Firma Infineon mit Capture-Compare-Einheit. Die Speicherung
der Zeitdaten geschieht
Umdrehungen des Drehschwingun
(z.B. konstante Drehzahl). Die Übergabe der Messdaten zum
mit der Microsoft Anwendung „Excel“ und dem Makro „Auswertung“ ausgewertet.
5 Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle
Das Triebwerk eines Pkw bildet mit Kurbeltrieb, Nockentrieb und angetriebenen
Nebenaggregaten ein kompliziertes schwingfähiges System. Es treten dabei
u
(Kurbelwelle), Biegeschwingungen (Kurbelwelle) und Längsschwingungen
(Antriebsriemen), auch Kombinationen der unterschiedlichen Schwingungsarten sind
möglich (Taumelbewegung des Schwungrades).
In
alltäglichen Schadensereignissen im Fahrzeug. Wegen der großen Lagerabstände bei
Kurbelwellen kam es zu Biege- und Torsionsschwingungen i
e
eine nur dreifach gelagerte Kurbelwelle.
Kurbelwellen von Fahrzeugmotoren sind in der Regel statisch unbes
F
von Hand für das System nicht möglich ist. Abschätzungen und Vereinfachungen setzten
die langjährige Erfahrung des Konstrukteurs voraus. Deshalb ste
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 20 -
In Bild 8 ist der Verlauf der Bruchkante an einem Hubzapfen dargestellt. Die 45°
Ausrichtung der Bruchkante zur Achse lässt keinen Zweifel an einem Torsionsbruch
aufkommen.
Bild 8: Torsionsbruch an einem Hubzapfen [9]
Für die z aus Anlage 1 entnommen.
Daraus wur ametern entwickelt.
u untersuchende Kurbelwelle wurden die Angaben
de die folgende Bildwelle mit den nebenstehenden Par
JTSD
cTSD/1 c1/2 c2/3 c3/4 c4/5c5/SR
JTSD
J1
J2
J3
⎛⎜⎜⎜⎜⎜⎜⎜
⎞⎟⎟⎟⎟⎟⎟⎟
0.012 kgm2
0.0107 kgm2
0.0107kgm2
0.
⎛⎜⎜⎜⎜⎜⎜⎜
⎞⎟⎟⎟⎟⎟
:=
cTSD/1
c1/2
c
⎛⎜⎜⎜
⎞⎟⎟⎟
208000Nmrad
605000Nmrad
605000Nm
J J J J J J1 2 3 4 5 SR
J4⎜ ⎟
0107kgm2
0.0107kgm2⎜
⎟⎟⎟
2/3
c3/4
⎜⎜⎜⎜
⎟⎟⎟⎟
rad
605000Nmrad
⎛⎜⎜⎜⎜⎜⎜
⎞⎟⎟⎟⎟⎟⎟
J5
JSR
⎜⎜⎜⎝
⎟⎟⎟⎠
0.0107kgm2
0.2136kgm2
⎜⎜⎜⎝
⎟⎟⎟⎠
c4/5
c5/SR
⎜⎜⎝
⎟⎟⎠
605000Nmrad
605000Nmrad
⎜⎜⎜
⎟⎟⎟
:=
⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎠
Bild 9: Bildwelle, Ausgangsmodell, Massenträgheitsmomente und Torsionssteifigkeiten
5.1 Anregung
Für die Entstehung von Kurbelwellenschwingungen sind dynamische Kräfte, die in die
Struktur eingeleitet werden, verantwortlich. Dazu gehören Unwuchten (Massenkräfte)
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
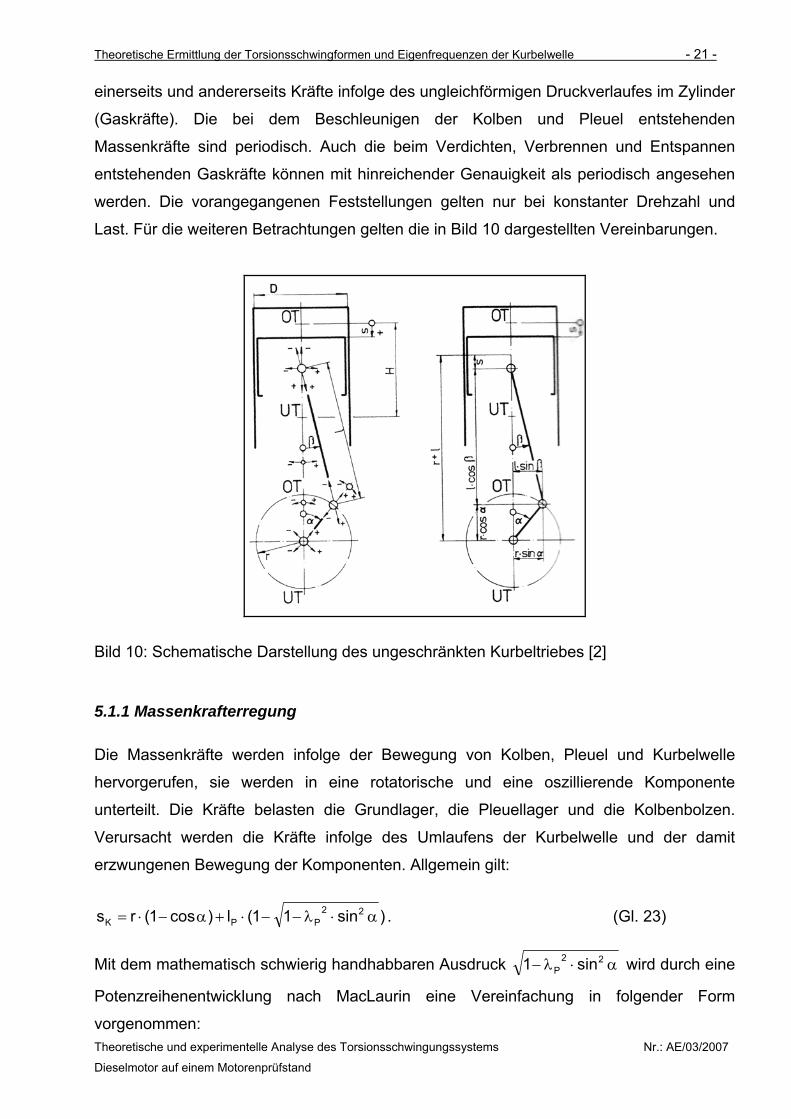
Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 21 -
einerseits und andererseits Kräfte infolge des ungleichförmigen Druckverlaufes im Zylinder
(Gaskräfte). Die bei dem Beschleunigen der Kolben und Pleuel entstehenden
Massenkräfte sind periodisch. Auch die beim Verdichten, Verbrennen und Entspannen
entstehenden Gaskräfte können mit hinreichender Genauigkeit als periodisch angesehen
werden. Die vorangegangenen Feststellungen gelten nur bei konstanter Drehzahl und
Last. Für die weiteren Betrachtungen gelten die in Bild 10 dargestellten Vereinbarungen.
Bild 10: Schematische Darstellung des ungeschränkten Kurbeltriebes [2]
5.1.1 Massenkrafterregung
Die Massenkräfte werden infolge der Bewegung von Kolben, Pleuel und Kurbelwelle
hervorgerufen, sie werden in eine rotatorische und eine oszillierende Komponente
unterteilt. Die Kräfte belasten die Grundlager, die Pleuellager und die Kolbenbolzen.
Verursacht werden die Kräfte infolge des Umlaufens der Kurbelwelle und der damit
erzwungenen Bewegung der Komponenten. Allgemein gilt:
)sin11(l)cos1(rs 22PPK α⋅λ−−⋅+α−⋅= . (Gl. 23)
Mit dem mathematisch schwierig handhabbaren Ausdruck α⋅λ− 22P sin1 wird durch eine
Potenzreihenentwicklung nach MacLaurin eine Vereinfachung in folgender Form
vorgenommen: Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 22 -
...!1x)0(y)0(y)x(y +⋅′+= (Gl. 24)
und mit xsin22P =α⋅λ und ysin1 22
P =α⋅λ− wird α⋅λ
−≈α⋅λ− 22
P22P sin
21sin1 ,
weiterhin ist ))2cos(1(21sin2 α−=α . Daraus wird die bekannte Näherungsgleichung für
den Kolbenweg sK.
( ) ( )⎥⎦⎤
⎢⎣
⎡ α−λ
+α−= )2cos(14
cos1rs PK (Gl. 25)
Nach dem Differenzieren nach der Zeit folgen die Gleichungen für Kolbengeschwindigkeit
und Kolbenbeschleunigung.
( )⎥⎦⎤
⎢⎣
⎡ α⋅λ
+αω= 2sin2
sinrs P& (Gl. 26)
(Gl. 27)
Grundlegend ist:
. (Gl. 28)
Mit den Massen für den kompletten Kolben und dem Massenanteil für die oszillierende
P2 αλ+ (Gl. 29)
( )[ ]α⋅λ+αω= 2coscosrs P2&&
amF ⋅=
Bewegung des Pleuels wird die oszillierende Massenkraft Fmosz zu
[ ]cosr)mm(F PoszKmosz αϖ⋅+−= )2cos(
berechnet.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 23 -
-12000
-8000
-4000
0
4000
8000
12000
16000
0
120
240
360
480
600
720
α [°KW]
n=1500 U/minn=3000 U/minn=4500 U/minn=4
a [m
/s2 ]
500 U/min 1. Ord.n=4500 U/min 2. Ord.
Bild 11: Darstellung der Kolbenbeschleunigung für einen Kolben in Abhängigkeit vom
Kurbelwinkel bei unterschie
dlichen Drehzahlen, λP=0,33
-16000
-12000
-8000
-4000
0
4000
8000
12000
0
120
240
360
480
600
720
α [°KW]
F mos
z [N
]
n = 1500 U/minn = 3000 U/minn = 4500 U/min
Bild 12: Darstellung der osz. Massenkraft eines Kolbens in Abhängigkeit vom Kurbelwinkel
bei unterschiedlichen Drehzahlen, λP=0,33
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 24 -
Für den 2,5l-Fünfzylinder-Dieselmotor beträgt die oszillierende Masse (Anlage 1) für eine
Zylindereinheit mosz = 1,021kg. Es ist deutlich zu erkennen, dass die
Kolbenbeschleunigung/oszillierende Massenkraft quadratisch mit der Drehzahl anwächst.
Bei Motoren mit symmetrischen Kurbelsternen heben sich die summierten Massenkräfte
auf. Für die Auslegung der Bauteile dürfen diese jedoch nicht vernachlässigt werden. Die
Kurbelkröpfungen des 2,5l-Fünfzylinder-Dieselmotors sind symmetrisch angeordnet. Die
Zündfolge (rot), Zylinderreihenfolge (schwarz) und Darstellung des Kurbelsterns können
Bild 13 entnommen werden.
Bild 13: Kurbelstern und Kurbelwelle (schematisch) des 2,5l-Fünfzylinder-Dieselmotors
5.1.2 Gaskrafterregung
Die Gaskraft lässt sich im Allgemeinen nicht analytisch ermitteln. Sie liegt aus Messungen
des Zylinderdruckes vor. Der Zylinderdruck wird mit Hilfe eines piezoelektrischen
Druckaufnehmers in Abhängigkeit vom Kurbelwinkel aufgezeichnet. Daraus wird die
Gaskraft berechnet:
. (Gl. 30)
In Bild 14 sind die Kolbenwege für alle fünf Zylinder dargestellt. Der gleiche Zündabstand
von 144° ist an Hand der gezeichneten „Blitze“ zu erkennen. Die oftmals symmetrische
uktion anzusehen. Für Wettbewerbsfahrzeuge
mit großer Leistung werden oft Kurbelwellen mit „Big Bang“ Zündfolgen konstruiert. Diese
Motoren zünden nacheinander nur wenige Grad Kurbelwinkel versetzt. So ist es dem
KG A)(pF ⋅α=
Aufteilung der Kröpfungen von Serienkurbelwellen und Zündfolgen darf nicht dazu
verleiten, dies als die einzig richtige Konstr
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 25 -
Reifen möglich, in ca. eineinhalb Kurbelwellenumdrehungen (ohne Zündung) wieder
Haftung aufzubauen.
α [°KW]
06
121824303642]
485460667278849096
0 40 80 120
160
200
240
280
320
360
400
440
480
520
560
600
640
680
720
s K [m
m
1.Zyl2.Zyl3.Zyl4.Zyl5.Zyl
Bild 14: Darstellung der Kolbenwege für alle Zylinder
Der Zylinderdruck wurde während der Drehschwingungsmessungen stets mit
ge
des oberen Totpunktes (OT) für Zylinder 1 den Drehwinkeln zugeordnet werden.
emessene Zylinderdruckverlauf des ersten Zylinders für
unterschiedliche Lastzustände und Drehzahlen dargestellt. Die Darstellung des
aufgezeichnet. Einerseits konnte somit die Gaskraft ermittelt und andererseits die La
Nachfolgend ist der g
Verdichtungsbeginns wurde zur besseren Übersichtlichkeit in die Diagrammmitte gelegt.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 26 -
0,0E+00
2,0E+06
4,0E+06
6,0E+06
8,0E+06
1,0E+07
1,2E+07
1,4E+07
1,6E+07
0 60 120 180 240 300 360 420 480 540 600 660 720
α [°KW]
p Zyl
inde
r1 [P
a]VL n = 4000 U/minVL n = 2500 U/minVL n = 1000 U/minNL n = 2500 U/minNL n = 800 U/min
Bild 15: Zylinderdruckverläufe für Zylinder 1 bei unterschiedlichen Drehzahlen und
Variation von Nulllast (NL) und Volllast (VL)
0 U/min ist der Zylinderdruckverlauf
bei Volllast bis zur Abregeldrehzahl n = 4500 U/min nahezu gleich.
Mit dem Wirksamwerden des Turboladers bei n = 165
5.1.3 Tangentialkraft
Für die Bewegung der Kurbelwelle ist die am Umfang angreifende Kraft verantwortlich.
Diese entsteht infolge der Wirkung der Gaskraft und der Massenkraft. Die
Massentangentialkraft Fmt wird für eine Zylindereinheit wie folgt berechnet:
( )β
β+α⋅αλ+αω⋅+−=
cos)sin()2cos(cosr)mm(F P
2PoszKmt . (Gl. 31)
Der Verlauf der berechneten Massentangentialkraft einer Zylindereinheit über dem
Kurbelwinkel bei unterschiedlichen Drehzahlen ist in Bild 16 dargestellt.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 27 -
-8000
-6000
-4000
-2000
0
2000
4000
6000
8000
0 60 120 180 240 300 360 420 480 540 600 660 720
α [°KW]
F mt [
N]
n = 4000 U/minn = 2500 U/minn = 1000 U/minn = 800 U/min
Bild 16: Verlauf der Massentangentialkraft für eine Zylindereinheit bei unterschiedlichen
Drehzahlen
he
zerlegt, das Ergebnis ist in Bild 17 dargestellt. Die Harmonischen sind Vielfache der
Kurbelwellendrehzahl und werden Ordnung x genannt.
Mit Hilfe der Fourier-Analyse wurde der Massentangentialkraftverlauf in Harmonisc
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
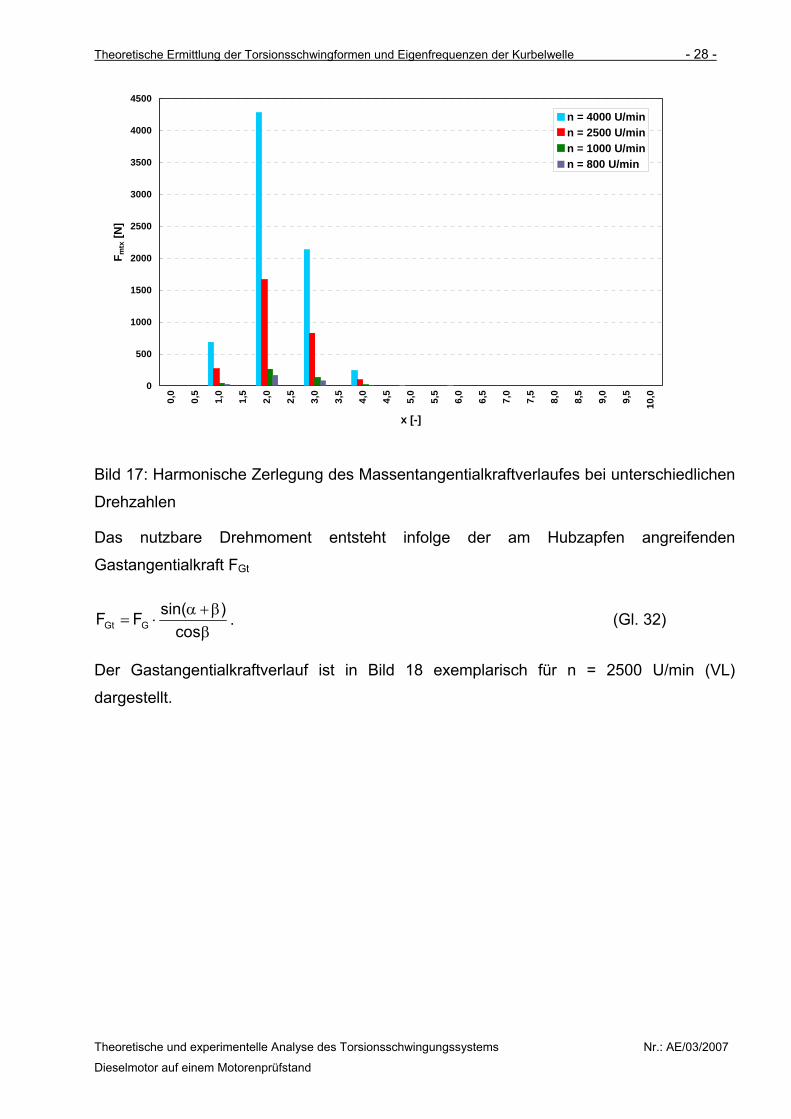
Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 28 -
0
500
1000
1500
2000
2500
3000
3500
4000
4500
0,0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
9,0
9,5
10,0
x [-]
F mtx
[N]
n = 4000 U/minn = 2500 U/minn = 1000 U/minn = 800 U/min
Bild 17: Harmonische Zerlegung des Massentangentialkraftverlaufes bei unterschiedlichen
Drehzahlen
Das nutzbare Drehmoment entsteht infolge der am Hubzapfen angreifenden
Gastangentialkraft FGt
ββ+α
⋅=cos
)sin(FF GGt . (Gl. 32)
Der Gastangentialkraftverlauf ist in Bild 18 exemplarisch für n = 2500 U/min (VL)
dargestellt.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 29 -
-10000
0
10000
20000
30000
40000
50000
60000
70000
80000
90000
0 60 120 180 240 300 360 420 480 540 600 660
α [°KW]
F [N
]
-2,0E+06
0,0E+00
2,0E+06
4,0E+06
6,0E+06
8,0E+06
1,0E+07
1,2E+07
1,4E+07
1,6E+07
1,8E+07
p übe
r [Pa
]
MassentangentialkraftGastangentialkraftGesamttangentialkraftZylinderdruck
Bild 18: Verlauf von Tangentialkräfte und Zylinderdruck über dem Kurbelwinkel bei
2500 U/min (VL)
er Kurbelwelle ist hingegen die Pleuelstangenkraft maßgebend.
Wegen der steifen Kurbelwellen und der kleinen Grundlagerabstände ergibt sich eine
große Biegeeigen er
Schädlichkeit meist hinter der der Torsionsschwingungen zurück. Die Zerlegung des
wurde der gemessene Zylinderdruckverlauf aus dem PAK-Messsystem
exportiert und in MS-Excel die harmonische Analyse durchgeführt. Die Zerlegung des
Gastangentialkraftverlaufes in Harmonische ist in Bild 19 dargestellt. Die
Gastangentialkraft regt den Kurbeltrieb breitbandig an.
Die Ursache der Drehschwingungen stellt einzig die Tangentialkraft dar, für die
Biegeschwingungen d
frequenz der KW. Die Biegeschwingungen der KW stehen in ihr
Gastangentialkraftverlaufes gemäß Bild 18 in Harmonische erfolgt mit Hilfe der Fourier-
Analyse. Es
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 30 -
0
2000
4000
6000
8000
10000
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
9,0
9,5
10,0
x [-]
F Gtx
[N]
Bild 19: Zerlegung des Gastangentialkraftverlaufes bei 2500 U/min (VL)
5.1.4 Ersatzerregerkräfte
Die spezifischen Ersatzerregerkräfte sind die Harmonischen des zerlegten
Tangentialkraftverlaufes bezogen auf die Kolbenfläche und werden wie folgt berechnet:
K
mtxGtxx A
FFD
+=
. (Gl. 33)
Dx [Pa] spezifische Ersatzerregerkraft
Diese sind für VL 2500 U/min in Bild 20 dargestellt. Mit größer werdenden Ordnungen
werden die spezifischen Ersatzerregerkräfte kleiner. Die einzelnen Erregerordnungen sind
hinsichtlich ihrer Bedeutung für die Anregbarkeit der KW zu Drehschwingungen
unterschiedlich „gefährlich“ einzustufen. Bei Mehrzylindermotoren mit z Zylindern addieren
sich die Wirkungen der folgenden hauptkritischen Ordnungen xH:
- Viertaktmotor: xH = 0,5z; 1z; 1,5z; 2z...
- Zweitaktmotor: xH = 1z; 2z; 3z; 4z...
Für den Fünfzylindermotor-Viertaktmotor sind die 2,5.; die 5.; die 7,5.; die 10. Ordnung die
Hauptkritischen. Die Nebenkritischen müssen auf ihre „Gefährlichkeit“ untersucht werden,
da sie sich gegenseitig teilweise auslöschen [2].
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 31 -
0,00
0,05
0,10
0,15
0,20
0,25
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
9,0
9,5
10,0
x [-]
Dx [
MPa
]
Bild 20: Spezifische Ersatzerregerkräfte 2500 U/min (VL)
Aus den an den einzelnen Kröpfungen angreifenden spezifischen Ersatzerregerkräften ist
tem resultierende Gesamterregerkraft zu bilden. Dazu werden
Mehrzylindermaschinen ergibt die folgende Berechnungsgleichung für die
Drehschwingungsam
die für das Schwingungssys
die berechneten relativen Schwingungsamplituden bei Resonanz für jede
Eigenschwingform verwendet. Die Energiebilanz für Kurbeltriebe von
plitude am freien Wellenende:
∑⋅µ⋅ϖ= z
2)i(frEKW
)a(A . (
=
axx RD Gl. 34)
De nner die Dämpfung. Die Größe Rax ist die
res Schwingungsamplituden a(i) über alle
⋅
1im
AfrEKW [m] Schwingungsamplitude am freien Wellenende
Rax [-] resultierende Vektorsumme der relativen Schwingungsamplituden a(i)
(a(i))2 [-] quadrierte relative Winkelamplituden der i-ten Kurbelkröpfung
ωm [rad/s] m-te Eigenkreisfrequenz
r Zähler repräsentiert die Erregung und der Ne
ultierende Vektorsumme der relativen
Kurbelkröpfungen i und für die Ordnung x. Die Ermittlung der Größe Rax geschieht auf
zeichnerischem Weg mit Hilfe der Richtungssterndarstellungen nach Bild 21.
Weiterführend sei hier auf [2] verwiesen.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 32 -
Bild 21: Richtungssterne der erregenden harmonischen Drehkräfte [2]
0,5*ZW 0,5; 3; 5,51*ZW 1; 3,5; 6 0,0002 0,0035 0,0000 0,1020 0,6860 0,3930 2,51461,5*ZW 1,5; 4; 6,5 0,0002 0,0035 0,0000 0,1020 0,6860 0,3930 2,5146
W 1,0680 0,9360 0,3711ZW 1,0967 0,0424 0,8693
Tabelle 7: Relative Schwingungsamplituden der Kurbelkröpfungen und die daraus
ermittelten Beträge der resultierenden Vektorsumme Rax
2. 3. 4. 5. 6. 7. 8.Zyl 1 0,0799 -0,0710 -0,0116 -0,5031 -0,3982 0,2033 0,9322Zyl 2 0,0798 -0,0718 -0,0116 -0,4327 0,0479 0,3733 -0,1966Zyl 3 0,0797 -0,0726 -0,0116 -0,3183 0,4652 0,0958 -0,9473Zyl 4 0,0795 -0,0733 -0,0116
Schwingform
-0,1715 0,6031 -0,2966 0,1242Zyl 5 0,0794 -0,0739 -0,0115 -0,0072 0,3787 -0,3334 0,9568
Rax Rax Rax Rax Rax Rax Raxz*0,5 Hauptord. 0,3982 0,3626 0,0580 1,4327 1,0967 0,0424 0,8693
0,0007 0,0036 0,0000 0,6253 1,0680 0,9360 0,3711
2*Z 2; 4,5; 7 0,0007 0,0036 0,0000 0,62532,5* 2,5; 5; 7,5 0,3982 0,3626 0,0580 1,4327
hlie nkritischen in
n resultierenden Vektorsummen Rax sind in
Bis einsc ßlich der 4. Ordnung treten gemäß Tabelle 7 keine Nebe
Erscheinung. Die zeichnerisch ermittelte
Bild 22 dargestellt.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 33 -
a(1)
a(2)
a(3)
a(4)
a(5)
a(1)a(2)
a(3)
a(4)
a(5)
a(1)
a(2)
a(3)
a(4)
a(5) a(1)
a(2)
a(3)
a(4)
a(5)
a(1)
a(2)
a(3)
a(4)
a(5)
a(1)a(2)a(3)
a(4)
a(5)a(1)
a(2)a(3)
a(4)
a(5)a(1)
a(2)
a(3)
a(4)
a(5)
a(1)
a(2)
a(3)
a(4)
a(5)
a(1)
a(2)
a(3)
a(4)
a(5)
a(1)
a(2)
a(3)a(5)a(4)
a(1)a(3)
a(4)
a(5)
a(2)
a(1)
a(2)
a(3)
a(4)
a(5)
a(1)
a(2)
a(3)a(4)
a(5)a(1)
a(2) a(3)a(4)a(5)
a(1)a(2)a(3)
a(4)a(5)
a(1)
a(2)
a(3)a(4)
a(5)
a(1)a(2) a(3)a(4)
a(5)
a(1)
a(2)
a(3)
a(4)a(5)
a(1)
a(2)
a(3)
a(4)a(5)
a(1)a(2)a(3)a(4)
a(5)
a(1)
a(2)
a(3)
a(4)a(5)a(1)
a(2)
a(3)
a(4)
a(5) a(1)
a(2)
a(3)
a(4)
a(5) a(1)
a(2)
a(3)
(4)a(5)
a
a(1)
a(3)
a(5) a(1)
a(3)
a(1)
a(3)
a(1)
a(3)
a(5)
a(2)
a(4)
a(2)
a(4)
a(5)
a(2)a(4)a(5)
a(2)
a(4)
Schwingform 2
Schwingform 3
Schwingform 6
Schwingform 7
Schwingform 8
Schwingform 4
Schwingform 5
Bild 22: Zeichnerische Ermittlung der resultierenden Vektorsummen Rax für die zweite bis
achte Eigenschwingform
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 34 -
0,000
0,005
0,010
0,015
0,020
0,025
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
x [-]
Dx
. Rax
[MPa
]Schwingform 3
Schwingform 4
Schwingform 5
Schwingform 6
Schwingform 7
Schwingform 8
Bild 23: Ersatzerregerkräfte Dx . Rax für die dritte bis achte Eigenschwingform bei
2500 U/min (VL)
Mit den berechneten spezifischen Erregerkräften Dx, den resultierenden Vektorsummen
Rax aus den Eigenschwingformen in Bild 38 konnten die Ersatzerregerkräfte für die
Kurbelwelle ermittelt werden. Die größten Erregerkräfte treten in der 5. Eigenschwingform
auf. Diese sollten messtechnisch nachzuweisen sein.
5.2 Torsionsschwingungsdämpfer
Der am Motor vorhandene Torsionsschwingungsdämpfer wurde im Rahmen der
Überholung des Steuertriebes demontiert. Dabei bot es sich an, das MTM des
ausgebauten Torsionsschwingungsdämpfers zu ermitteln. Es wurde ein Dreifadenpendel
konstruiert ([27] und Bild 24). Unter der Maßgabe, auch Probekörper mit kleinem
Massenträgheitsmoment untersuchen zu können, wurde der Teller aus einer 2 mm dicken
Aluminiumplatte hergestellt. Für die Aufhängung kamen biegeschlaffe, reißfeste, multifile
Angelschnüre zum Einsatz.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 35 -
Bild 24: Dreifadenpendel, Tischausführung [27]
Aus einem baugleichen TSD wurde ein Schnittmodell gefertigt, mit diesem als Grundlage
erstellt we
unktionsgruppen separiert werden: Nabe der Riemenscheibe mit
Dämpfergummi und Riemenscheibe, Nabe des Torsionsschwingungsdämpfers mit
konnte ein 3D-Computermodell rden. Aus dem ausgeschnittenen Segment
konnten drei F
Dämpfergummi und Tilgermasse, Gleitring.
Bild 25: Schnittmodell Torsionsschwingungsdämpfer, 3D-Modell Torsions-
schwingungsdämpfer
Mit dem 3D-Modell (Bild 25) wurden die Massenträgheitsmomente und Einzelmassen der
Komponenten des TSD berechnet. Die Ergebnisse der Messung und der Berechnung sind
in Tabelle 8 dargestellt. Die gute Übereinstimmung von Messung und Simulation ist
offensichtlich.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
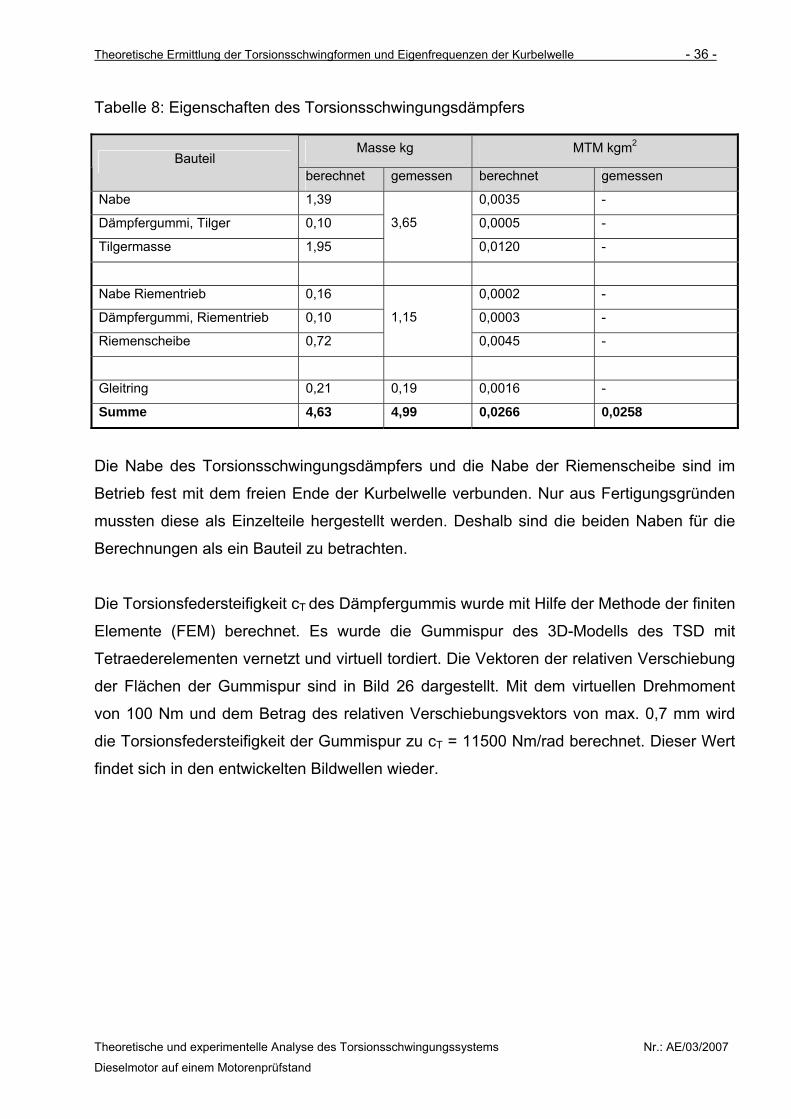
Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 36 -
Tabelle 8: Eigenschaften des Torsionsschwingungsdämpfers
Masse kg MTM kgm2
Bauteil berechnet gemessen berechnet gemessen
Nabe 1,39 0,0035 -
Dämpfergummi, Tilger 0,10 0,0005 -
Tilgermasse 1,95
3,65
0,0120 -
Nabe Riementrieb 0,16 0,0002 -
Dämpfergummi, Riementrieb 0,10 0,0003 -
Riemenscheibe 0,72
1,15
0,0045 -
Gleitring 0,21 0,19 0,0016 -
Summe 4,63 4,99 0,0266 0,0258
Die Nabe des Torsionsschwingungsdämpfers und die Nabe der Riemenscheibe sind im
Betrieb fest mit dem freien Ende der Kurbelwelle verbunden. Nur aus Fertigungsgründen
mussten diese als Einzelteile hergestellt werden. Deshalb sind die beiden Naben für die
Berechnungen als ein Bauteil zu betrachten.
Die Torsionsfedersteifigkeit cT des Dämpfergummis wurde mit Hilfe der Methode der finiten
Elemente (FEM) berechnet. Es wurde die Gummispur des 3D-Modells des TSD mit
Tetraederelementen vernetzt und virtuell tordiert. Die Vektoren der relativen Verschiebung
der Flächen der Gummispur sind in Bild 26 dargestellt. Mit dem virtuellen Drehmoment
von 100 Nm und dem Betrag des relativen Verschiebungsvektors von max. 0,7 mm wird
die Torsionsfedersteifigkeit der Gummispur zu cT = 11500 Nm/rad berechnet. Dieser Wert
findet sich in den entwickelten Bildwellen wieder.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 37 -
Bild 26: Virtuell tordierte Gummispur des TSD
5.3 Zweimassenschwungrad
Die Masse des herkömmlichen Schwungrades wird in zwei Massen aufgeteilt und zu
inem Teil dem Motor und zum anderen Teil dem Getriebe zugeordnet. Die
10] wird die Entwicklung eines linearen
Modells mit jeweils individuellen Gültigkeitsbereichen dargestellt. Den Algorithmus für die
Generierung einer solchen Modellstruktur zur Approximation nichtlinearer Modelle durch
mehrere lineare Teilmodelle bezeichnet man in der Literatur häufig als LoLiMoT-
Algorithmus (Local Linear Model Tree). Die Anzahl der linearen Einzelmodelle hängt dabei
im Wesentlichen von der Komplexität des ZMS sowie der zu gewährleistenden geforderten
Approximationsgüte ab. Bei ZMS-Modellen für Mittelklasse-Fahrzeuge wurden in [10] mit
zwölf Einzelmodellen gute Ergebnisse erzielt.
e
Massenträgheitsmomente von Primär- zu Sekundärseite verhalten sich 1,1 zu 1. Die
Primärmasse ist fest mit der Kurbelwelle verbunden. Die Sekundärmasse ist mit Hilfe
eines Rillenkugellagers drehbar auf der Nabe der Primärseite angebracht. Die Kopplung
der beiden Massen wird mit Hilfe von radial angeordneten Schraubenfedern realisiert
(cT=300 Nm/rad). Diese liegen bogenförmig zwischen Primär- und Sekundärseite des ZMS
und reiben an den Begrenzungsflächen. Das ZMS verhält sich hinsichtlich seiner
Schwingungseigenschaften stark nichtlinear. In [
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 38 -
Bild 27: schematischer Aufbau des ZMS [10]
imassenschwungrades liegt unter der kleinsten
Anregungsfrequenz (Drehfrequenz bei Leerlaufdrehzahl) des Verbrennungsmotors.
Die Eigenfrequenz des Zwe
Lediglich beim Anlassen und Abstellen kommt es zu Resonanzdurchläufen. Um die
Amplituden zu begrenzen, ist ein zusätzlicher Reibdämpfer zwischen Primär- und
Sekundärmasse installiert. Im Motorbetrieb ist dieser Reibdämpfer außer Funktion und die
Drehungleichförmigkeiten werden durch die zyklische Energieaufnahme bzw. –abgabe der
Federn vom Getriebe isoliert. Die Gegenüberstellung von herkömmlichem
Einmassenschwungrad und Zweimassenschwungrad ist in Bild 28 dargestellt.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 39 -
Bild 28: Systemskizze konventionelle Kupplung/Zweimassenschwungrad [21]
Die relativen Verdrehwinkelamplituden von Primär- und Sekundärmasse des ZMS hängen
von der Drehzahl und dem zu übertragenden Drehmoment ab. In Bild 29 ist der Verlauf
des relativen Verdrehwinkels über der Zeit bei Leerlaufdrehzahl n = 800 U/min dargestellt.
Die aus dem Bild 29 abgelesene Amplitude beträgt 2°.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 40 -
Bild 29: Drehzahländerung und relativer Verdrehwinkel zwischen Primär- und
Sekundärseite des ZMS aus [10]
In Bild 30 ist der gemessene Verlauf des Verdrehwinkels zwischen Primär- und
Sekundärseite des ZMS bei einer konstanten Belastung von 30 Nm dargestellt. Die
Amplituden des relativen Verdrehwinkels des ZMS nehmen zu großen Frequenzen ab,
Gleichlauf beider Massen kann über den gesamten Betriebsdrehzahlbereich nicht
beobachtet werden. Die Verdrehwinkelamplitude bei 800 U/min beträgt 3°, dies korreliert
mit den Ergebnissen aus [10], siehe Bild 29. Die Symmetrie der Verdrehwinkelamplituden
zur Abszisse ist der Messeinstellung geschuldet, der Verdrehwinkel infolge der Wirkung
des statischen Momentes wurde mit Hilfe eines Hochpassfilters ausgeblendet. Der
qualitative Verlauf des relativen Verdrehwinkels bei Volllast ist in Bild 31 dargestellt. Die
„Ausreißer“ der Verdrehwinkelamplituden bei kleinen Drehzahlen entstehen infolge der
unsicheren Erfassung der Drehzahl an der Sekundärseite des ZMS.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
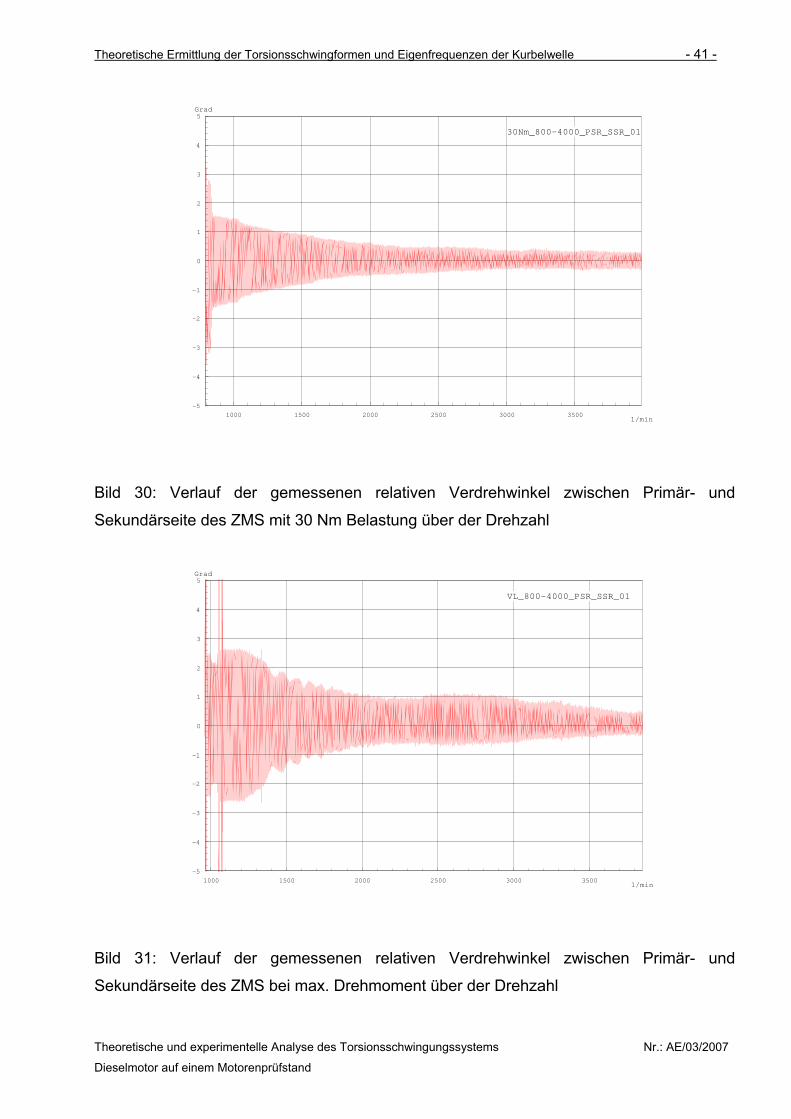
Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 41 -
1000 1500 2000 2500 3000 35001/min
-5
-4
-3
-2
-1
0
1
2
3
4
5Grad
30Nm_800-4000_PSR_SSR_01
Bild 30: Verlauf der gemessenen relativen Verdrehwinkel zwischen Primär- und
Sekundärseite des ZMS mit 30 Nm Belastung über der Drehzahl
1000 1500 2000 2500 3000 35001/min
-5
-4
-3
-2
-1
0
1
2
3
4
5Grad
VL_800-4000_PSR_SSR_01
Bild 31: Verlauf der gemessenen relativen Verdrehwinkel zwischen Primär- und
Sekundärseite des ZMS bei max. Drehmoment über der Drehzahl
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 42 -
5.4 Torsionseigenfrequenzen und Eigenschwingungen
Die Eigenschwingung (Mode) ist ein charakteristisches Verformungsbild des
Schwingungssystems. Jede Mode wird durch die Modal-Parameter Eigenfrequenz,
Dämpfungsgrad und Eigenschwingungsform bestimmt. Ein Schwingungssystem liegt
dabei stets im Original vor. Für dieses können die kennzeichnenden Größen mit Hilfe von
Messungen bestimmt werden. Im Gegensatz dazu können Berechnungen nur an
Ersatzsystemen durchgeführt werden. Daher muss bei unterschiedlichen Ergebnissen,
ordnungsgemäße Messung und Rechnung vorausgesetzt, der Fehler auf der Modell- bzw.
Rechenseite liegen. Für das Ersatzsystem ergeben sich genau so viele Moden, wie
Freiheitsgrade (Variablen) vergeben werden. Es folgt, dass ein reales System unendlich
viele Freiheitsgrade und somit unendlich viele Moden besitzt. Für das Ersatzsystem sind
deshalb die Freiheitsgrade „mit Verstand“ zu vergeben. Werden die Messstellen am realen
Objekt im Modell abgebildet, so ist es möglich, mit Hilfe der gemessenen und der
berechneten Werte auf die inneren, nicht zugänglichen Abschnitte des Messobjektes zu
Zur Berechnung der Eigenfrequenzen sind unterschiedliche Verfahren bekannt.
Stellvertretend für diese werden die Torsionseigenfrequenzen mit Hilfe der Gümbel-
Holzer-Tolle-Methode und der Matrizenmethode berechnet. Für alle Methoden ist es
unabdingbar, die mechanischen Eigenschaften der Kurbelwelle zu kennen. Bei der
Untersuchung von Torsionssystemen sind diese hinsichtlich der Einspannbedingungen zu
unterscheiden.
Gefesselte Torsionssysteme liegen dann vor, wenn die Bewegung des
Schwingungssystems an mindestens einem Ende vorgegeben ist, d. h. eine beliebige freie
Starrkörperdrehung des Systems ohne elastische Verformung unmöglich ist. Dies ist dann
gegeben, wenn ein Ende entweder fest eingespannt oder mit einer so großen Drehmasse
verbunden ist, dass die Rückwirkung der Torsionsschwingung auf die Bewegung der
Drehmasse vernachlässigt werden kann.
schließen.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 43 -
Mathematisch entspricht einem gefesselten Schwingungssystem eine reguläre
Steifigkeitsmatrix.
det C ≠ 0, C regulär
Freie bzw. ungefesselte Systeme sind dadurch charakterisiert, dass jede beliebige
Starrkörperdrehung eine Lösung der Bewegungsgleichung darstellt. Die Enden des
Torsionsschwingungssystems können sich frei bewegen. Kennzeichnend für ungefesselte
Systeme ist eine singuläre Steifigkeitsmatrix.
det C = 0, C singulär
Die Starrkörperdrehung wird im Prüfstandsbetrieb nicht behindert, das Gesamtsystem
Motor-Prüfstand ist ungefesselt.
5.4.1 Gümbel-Holzer-Tolle-Methode
Zur Abschätzung der kleinsten Eigenkreisfrequenz ωu wird der Neubersche Grenzwert
gebildet. Dazu werden die einzelnen Wellenabschnitte gedanklich nacheinander versteift
und jeweils nur ein Zweimassensystem untersucht. Die nachstehende Skizze (Bild 32)
verdeutlicht dies.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 44 -
ω1c1
J1
c1
J2 J3+ J4+ J5+ J6+ J7++:=
ω1 4256rads
=
ω2c2
J1 J2+
c2
J3 J+ J+ J+ J+4 5 6 7+:= ω2 5386
rads
=
ω3c3
J J+ J+1 2 3
c3
J J+ J+ J+4 5 6 7+:= ω3 4536
rads
=
ω4c4
J1 J2+ J3+ J4+
c4
J5 J6+ J7++:=
ω4 4036rads
=
ω5c5
J1 J2+ J3+ J4+ J5+
c5
J6 J7++:= ω5 3706
rads
=
ω6c6
J1 J2+ J3+ J4+ J5+ J6+
c6
J7+:= ω6 3474
rads
=
Bild 32: Bildwelle, versteifte Wellenabschnitte
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 45 -
Mit den oben dargestellten Ergebnissen wird nach Neuber [2]
26
25
24
23
22
u 1111111
21ϖ
+ϖ
+ϖ
+ϖ
+ϖ
+ϖ
=ϖ
,
(Gl. 35)
die untere Eigenkreisfrequenz des Systems zu ωu = 1678 rad/s berechnet. Die berechnete
Eigenkreisfrequenz ist stets kleiner als die erste Eigenkreisfrequenz ω1 des Systems. Mit
Hilfe der Gümbel-Holzer-Tolle-Methode können die Eigenkreisfrequenzen und
Eigenschwingformen des Systems ermittelt werden. Für den Lösungsansatz gilt: Am Ende
des Systems greift ein harmonisches Erregermoment Mk mit der Kreisfrequenz Ω an.
Dieses verursacht an der Angriffsstelle eine Winkelamplitude mit dem Betrag α1 = 1.
Wenn die Winkelamplitude α für die erste Drehmasse bekannt ist, so können die
folgenden Winkelamplituden αi mit Hilfe der folgenden Gleichungen nacheinander
berechnet werden.
2
6T
66554433221167
2
5T
554433221156
2
4T
4433221145
2
3T
33221134
2
2T
221123
2
1T
1112
1
cJJJJJJ
cJJJJJ
cJJJJ
cJJJ
cJJ
cJ
1
Ω⋅⋅α+⋅α+⋅α+⋅α+⋅α+⋅α
−α=α
Ω⋅⋅α+⋅α+⋅α+⋅α+⋅α
−α=α
Ω⋅⋅α+⋅α+⋅α+⋅α
−α=α
Ω⋅⋅α+⋅α+⋅α
−α=α
Ω⋅⋅α+⋅α
−α=α
Ω⋅⋅α
−α=α
=α
(Gl. 36)
Für die Schwingungsamplituden verschwindet das Erregermoment Mk wenn die gewählte
Kreisfrequenz Ω mit einer Eigenkreisfrequenz ω des Systems zusammenfällt. Es wird das
isfrequenz Ω aufgetragen und die
Eigenkreisfrequenzen des Systems können abgelesen werden (schwarze Punkte in
Bild 33).
Resterregermoment R über der Kre
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 46 -
277
266
255
244
233
222
211 JJJJJR Ω⋅⋅α+Ω⋅⋅α+Ω⋅⋅α+Ω⋅⋅α+Ω⋅⋅α=
JJ Ω⋅⋅α+Ω⋅⋅α+ (Gl. 37)
Bild 33: Verlauf des Resterregermomentes R gemäß Ausgangsbildwelle
Es wird deutlich, dass die kleinste Eigenfrequenz eines Systems ω0 = 0 ist, denn ohne
äußere Kraft bleibt das System in Ruhe oder bewegt sich gleichförmig. Mit dieser Aussage
lässt sich der Anstieg der Drehwinkelamplituden zu kleinen Drehzahlen als Resonanz bei
Eigenfrequenz ω0 = 0 interpretieren (z. B. Ordnungsverläufe in Bild 52). Die
charakteristische Eigenfrequenz eines Systems ist die erste von Null abweichende, in
diesem Fall ω1 = 1946 rad/s. Werden die Schwingungsamplituden für die gefundenen
Eigenfrequenzen berechnet, so sind die Eigenschwingformen für das System darstellbar
(siehe Bild 34). Die Eigenkreisfrequenzen sind:
ω0 = 0 rad/s, ω1 = 1946 rad/s, ω2 = 4453 rad/s, ω3 = 7038 rad/s, ω4 = 10160 rad/s,
ω5 = 12771 rad/s, ω6 = 14458 rad/s.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 47 -
Bild 34: Eigenschwingformen für die Ausgangsbildwelle
5.4.2 Matrizen-Methode
Zum gleichen Ergebnis gelangt man, wenn man anstatt der Gümbel-Holzer-Tolle-Methode
auf die Matrizen-Methode zurückgreift. Dieser ist wegen der heutigen Möglichkeiten der
hwingerketten ein Differentialgleichungssystem in
folgender Form aufgestellt:
Rechentechnik der Vorrang zu geben. Mit dem in Bild 3 dargestellten Einfachschwinger
wird für ungedämpfte Torsionssc
0CM =ϕ⋅+ϕ⋅ && . (Gl. 38)
Dieses beinhaltet die Massenmatrix M, die Winkelbeschleunigung ϕ&& , die Steifigkeitsmatrix
C und den Schwingwinkel ϕ. Für die i-te Einzeldrehmasse ergibt sich nach dem
Freischneiden gemäß nachfolgendem Bild 35 die Bewegungsgleichung zu:
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 48 -
)(c)(cJ)(cM)(cM
1ii1i,ii1ii,1iii
1ii1i,i1i,i
i1ii,1ii,1i
++−−
+++
−−−
ϕ−ϕ⋅−ϕ−ϕ⋅=ϕ⋅
ϕ−ϕ⋅=
ϕ−ϕ⋅=
&&
. (Gl. 39)
c1,2
J1 JnJi-1 JiJi+1
ϕi-1 ϕi ϕi+1
ci-1,i ci,i+1 cn-1,n
Ji
Mi-1,i Mi,i+1
Bild 35: Torsionsschwingerkette mit freigeschnittener i-ten Drehmasse
Das vollständige Differentialgleichungssystem ergibt sich nach Umformung von obiger
Gleichung zu:
0c)cc(cJ 1i1i,ii1i,ii,1i1ii,1iii =ϕ⋅−ϕ⋅++ϕ⋅−ϕ⋅ +++−−−&& . (Gl. 40)
Mit dem komplexen Lösungsansatz:
(Gl. 41)
Gleichungssystem überführt.
tjii eˆ ω⋅ϕ=ϕ
wird obige Gleichung in das folgende homogene, lineare
0
ˆ
ˆ
Jcc000
0cJccc0
n
3
2nn,1nn,1n
4,32
23,22,13,2 =
⎪⎪⎪
⎭
⎬
⎪⎪⎪
⎩
⎨
ϕ⋅
ϕ⋅
⎥⎥⎥⎥
⎦⎢⎢⎢⎢
⎣ ϖ−−⋅⋅⋅⋅⋅
−ϖ−+−
−−
(Gl. 42)
ˆˆ
00cJccc000
2
1
3,22
23,22,12,1 ⎪⎪⎪⎫
⎪⎪⎪⎧ϕϕ
⎥⎥⎤
⎢ −ϖ−+−
Mit dem dargestellten Gleichungssystem wird ein typisches Eigenwertproblem definiert,
unbekannt s ie
die Gleichung
wie folgt aus [7]:
cJc 2,12
12,1⎢⎡ −ϖ−
ind die Schwingungsamplituden ϕi der Drehmassen und d
Eigenkreisfrequenzen ωi. Da das homogene Gleichungssystem keine rechte Seite besitzt,
ist das Verschwinden der Determinante der Systemmatrix eine notwendige Bedingung für
die Existenz einer Lösung. Zur Ermittlung der Eigenkreisfrequenzen sieht
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 49 -
0
Jcc000
0cJccc000c 3,2−Jccc000cJc
DET
2nn,1nn,1n
4,32
23,22,13,2
223,22,12,1
2,12
12,1
=
ϖ−−⋅⋅⋅⋅⋅
−ϖ−+−ϖ−+−
−ϖ−
=
−−
.
(Gl. 43)
Für die Ausgangsbildwelle ist die Matrix folgend und in Anlage 6 dargestellt. Die Lösungen
der Determinantengleichung wurden mit Hilfe von „MathCAD“ numerisch ermittelt.
M ω( ) 0
0
0 c3− c3 c4+ J4 ω2
⋅− c4− 0 0
⎛⎜⎜⎜⎜
⎜
⎜⎜⎜⎜
⎞
⎟⎟⎟⎟⎟⎟
⎟⎟⎟⎟
c1 J1 ω2
⋅−
c1−
0
c1−
c1 c2+ J2 ω2
⋅−
0
0
0
c2−
0
0
0
0
c4−
0
0
0
0
c4 c5+ J5 ω2
⋅−
0
0
0
c5−
c6−
0
0
0
c6 J7 ω2
⋅−
0
⎜⎜ 0 c2− c2 c3+ J3 ω
2⋅− c3− 0 0
⎜⎜⎜
⎟:=
c5− c5 c6+ J6 ω2
⋅− c6− ⎟⎟
⎜⎝ 0 0 0 ⎠
rechte Seite und die relativen Schwingwinkel sind gemäß folgender Gleichung zu
ermitteln. 0
c2−
c2 c3+ J3 ω2
⋅−
c3−
0
0
c3−
c3 c4+ J4 ω2
⋅−
0
0
0
c4−
0
0
0
0
0
0
0
0
(Gl. 44)
Mit der Normierung der 1. Schwingungsamplitude ϕ1 = 1 erhält die obige Matrix eine
⎛⎜⎜⎜⎜⎜⎜⎜⎜
⎞
⎟⎟⎟⎟⎟⎟⎟
c1−
c1 c2+ J2 ω2
⋅−
c2−
0
0 0 c4− c4 c5+ J5 ω2
⋅− c5− 0
0 0 0 c5− c5 c6+ J6 ω2
⋅− c6−
⎜⎜⎜⎜⎝
⎟⎟⎟
⎠
φ2
φ3
φ4
φ5
⎛
φ6
φ7
⎜⎜⎜⎜⎜⎜⎜⎝
⎟
⎠0
⎞
⎟⎟⎟⎟
⋅
c1− J1 ω⋅+
c1
0
0
0
⎛ 2⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞
⎟⎟⎟⎟⎟
⎠
:=
⎟
(Gl. 45)
Die Ergebnisse der Berechnungen sind mit denen der Gümbel-Holzer-Tolle-Methode
identisch und werden deshalb an dieser Stelle nicht ausgeführt, sie sind in Anlage 6
dargestellt.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 50 -
An der Ausgangsbildwelle wurden in Bezug auf Detailtreue gegenüber dem
Prüfstandsaufbau Unzulänglichkeiten festgestellt. So ist am Prüfstand ein ZMS verbaut
und der TSD ist am freien Ende der Kurbelwelle angebracht. Die Nabe des TSD ist mit der
Tilgermasse des TSD mit einer Gummispur verbunden. Diese Parameter flossen in
folgenden Ansatz ein.
JT JN J2 J3 J4 J5
cT/N c1/2 c2/3c3/4 c4/5c5/PSR cPSR/SSRcN/1 T
JN
J1
⎛⎜⎜⎜⎜
⎞⎟⎟⎟⎟
0.012 kg⋅ m⋅
0.0037kg⋅ m2⋅
0.0107kg⋅ m2⋅
⎜⎜⎜⎜
⎟⎟⎟⎟
J1 JSSRJPSR
J
J2
J3
J4
J5
JPSR
JSSR
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
2
0.0107kg⋅ m2⋅
0.0107kg⋅ m2⋅
0.0107kg⋅ m2⋅
0.0107kg⋅ m2⋅
0.11 kg⋅ m2⋅
0.095 kg⋅ m2⋅
⎛
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
cTN
cN1
⎛⎜⎜⎜
⎞⎟⎟⎟
c12
c23
c34
c45
c5PSR
cPSRSSR
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
11500N m⋅rad
⋅
208000N m⋅rad
⋅
605000N m⋅rad
⋅
605000N m⋅rad
⋅
605000N m⋅rad
⋅
605000N m⋅rad
⋅
605000N m⋅rad
⋅
270N m⋅rad
⋅
⎛⎜⎜
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎞⎟⎟
⎜⎜⎜⎜
⎟⎟⎟⎟
⎝
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
Bild 36: Bildwelle, um TSD und ZMS erweitertes Modell
Mit Hilfe der Matrizenmethode wurden die Eigenkreisfrequenzen ermittelt. Diese stellen
Letztendlich wurde die Torsionsschwingerkette um die Glieder Elastikwelle und
Wirbelstrombremse erweitert. Mit diesen entsteht ein Modell mit elf Freiheitsgraden
(Bild 37).
nur ein Zwischenergebnis dar und werden deshalb an dieser Stelle nicht aufgeführt, sehr
wohl können diese in Anlage 7 betrachtet werden.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 51 -
cT/N c2/3 c3/4 c4/5c5/PSRcPSR/SSRcN/1
JT JN J2 J3 J4 J5J1 JSSRJPSR JEla JBremse
J1
J2
J3
J4
J5
JPSR
JSSR
JEla
JBremse
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
0.0107kg⋅ m2⋅
0.0107kg⋅ m2⋅
0.0107kg⋅ m2⋅
0.0107kg⋅ m2⋅
0.0107kg⋅ m2⋅
0.11 kg⋅ m2⋅
0.095 kg⋅ m2⋅
0.0955kg⋅ m2⋅
0.237 kg⋅ m2⋅
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
c1/2
cSSR/ElacEla/Bremse
JT
JN
⎛⎜⎜⎜
⎞⎟⎟⎟
0.012 kg⋅ m2⋅
0.0037kg⋅ m2⋅
⎛⎜⎜⎜
⎞⎟⎟⎟
cTN
c
⎛⎜⎜
⎞⎟⎟
11500N m⋅rad
N1
c12
c23
c34
c45
c5PSR
cPSRSSR
cSSREla
cElaBremse
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
⋅
208000N m⋅rad
⋅
605000N m⋅rad
⋅
605000N m⋅rad
⋅
605000N m⋅rad
⋅
605000N m⋅rad
⋅
605000N m⋅rad
⋅
270N m⋅rad
⋅
2800N m⋅rad
⋅
2800N m⋅rad
⋅
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
⎛⎜⎜⎜⎜⎜⎜
⎞⎟⎟⎟⎟⎟⎟
Bild 37: Bildwelle, um TSD, ZMS, Elastikwelle und Bremse erweitertes Modell
Dieses Modell kann nicht mehr mit „MathCAD“ berechnet werden, es wurde auf das
Programm „Mathematica“ zurückgegriffen. Die aufgestellte Matrix ist mit den
zen Anlage 8 zu entnehmen. Die
igenkreisfrequenzen lauten:
sind nachfolgend dargestellt. Die
aupteigenschwingform der Kurbelwelle stellt dabei die Eigenschwingform bei
Eingabeparametern und errechneten Eigenkreisfrequen
E
ω0 = 0 rad/s, ω1 = 44 rad/s, ω2 = 139 rad/s, ω3 = 280 rad/s, ω4 = 955 rad/s, ω5 = 2478 rad/s,
ω6 = 5896 rad/s, ω7 = 8319 rad/s, ω8 = 10445 rad/s ω9 = 12830 rad/s, ω10 = 14468 rad/s.
Die dazu gehörenden Eigenschwingformen
H
ω5 = 2478 rad/s dar.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 52 -
1. 2.
3. 4.
5. 6.
7. 8.
9. 10.
Bild 38: Eigenschwingformen der Bildwelle mit ZMS, TSD und Belastungseinheit
Wegen der Nichtlinearitäten des ZMS und des TSD und der nicht validierten MTM und
Torsionssteifigkeiten der Kurbelwelle sind die Ergebnisse der Berechnungen nicht als
„absolut gültige“ Werte anzusehen. Vielmehr muss mit Hilfe der Messung das Modell
angepasst werden. Die Zahl der Freiheitsgrade weiter zu erhöhen, ist infolge der
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 53 -
Leistungsfähigkeit der Rechentechnik kein Problem. Das Kennen der mechanischen
Größen des Systems stellt die Herausforderung dar. Mit Hilfe der Rechentechnik können
die mechanischen Kenngrößen aus den Konstruktionsdaten gewonnnen werden. Es
wurde versucht, die Torsionssteifigkeit einer Kurbelkröpfung (Bild 39) mit Hilfe eines FEM-
Modells in Catia V5 zu ermitteln. Die Differenzen aus den Ergebnissen der Rechnung und
den Daten aus Anlage 1 konnten infolge des nicht genau bekannten Aufbaus der KW nicht
bewertet werden. Zukünftig muss der Weg der FEM-Modellierung zur Ermittlung der
Torsionssteifigkeiten und Massenträgheitsmomente der KW beschritten werden.
Bild 39: Modellierte Kurbelkröpfung in Anlehnung an die Ausgangsdaten gemäß Anlage 1
5.5 Resonanzschaubilder der unterschiedlichen Bildwellen
Für die entwickelten Bildwellen wurden die Resonanzschaubilder erarbeitet. Dabei stellen
die waagerechten Linien (rot) die Eigenkreisfrequenzen und das Strahlenbüschel (blau)
die Ordnungen über der Drehzahl dar. An Schnittpunkten der Linien kommt es im
Betriebsdrehzahlbereich zu Resonanz. Je nach Intensität der Anregung führen diese zu
Systems detektierbaren Resonanzüberhöhungen, mit denen die modale Dämpfung des
ermittelt werden kann. Mit Hilfe dieser Resonanzschaubilder können die kritischen
Drehzahlen auf der Abszisse abgelesen werden. In den folgenden Bildern sind diese
dargestellt.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 54 -
1.2.2,5.
5.
7,5.
10.
12,5
15.
17,5.
20.
22,5.
25.
27,5.
30.
6000
8000
10000
12000
14000
ω [r
ad/s
]
.
0
2000
4000
0 500 1000 1500 2000 2500 3000 3500 4000 4500
n [U/min]
Bild 40: Resonanzschaubild der Ausgangsbildwelle
1.2.2,5.
5.
0
2000
0 500 1000 1500 2000 2500 3000 3500 4000 4500
n [U/min]
Bild 41: Resonanzschaubild der Bildwelle mit ZMS und TSD
Mit Einsatz des TSD wird die Eigenkreisfrequenz ω = 1946 rad/s der Ausgangsbildwelle in
eine größere
7,5.
10.
12,5.
20.
22,5.
25.
27,5.
30.
6000
10000
12000
14000
ωs]
(ω = 2431 rad/s) und eine kleinere Eigenkreisfrequenz (ω = 939 rad/s)
aufgespaltet (Bild 41).
15.
17,5.8000
[rad
/
4000
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Theoretische Ermittlung der Torsionsschwingformen und Eigenfrequenzen der Kurbelwelle - 55 -
1.2.2,5.
5.
7,5.
10.
12,5.
15.
17,5.
20.
22,5.
25.
27,5.
30.
0
2000
4000
6000
8000
10000
12000
14000
0 500 1000 1500 2000 2500 3000 3500 4000 4500
n [U/min]
ω [r
ad/s
]
Untersuchungsbereich
Bild 42: Resonanzschaubild der Bildwelle mit ZMS, TSD und Belastungseinrichtung
Bild 42 zeigt die Verschiebung der Eigenkreisfrequenzen nach ω = 956 rad/s und
ω = 2478 rad/s. Letztendlich sollten diese im gemessenen Resonanzschaubild gefunden
werden. Es ist zu erkennen, dass eine Resonanzfrequenz von der 2,5. Ordnung bei ca.
3600 U/min erregt wird. Hingegen erreicht die 5. Ordnung im Betriebsbereich die
Eigenkreisfrequenz ω = 2478 rad/s nicht. Für die Untersuchung der KW wurde der
Drehzahlbereich des Motors von nmin = 800 U/min bis nmax = 4000 U/min vom
Verantwortlichen der WHZ freigegeben.
5.6 Ermittlung von Dämpfungskennwerten
Die Dämpfung des Gesamtsystems Torsionsschwingungsdämpfer, Kurbelwelle,
Zweimassenschwungrad, Elastikwelle und Belastungseinheit wird mit Hilfe des Verfahrens
der Halbwertsbreite ermittelt. Dafür werden die Dämpfungskennwerte im
Resonanzzustand aus den Graphen der einzelnen Ordnungen ermittelt. Es werden die im
mplituden der Ordnungen am gemessenen Resonanzschaubild ermittelten Verdrehwinkela
Bildschirm ausgewertet. Die Größe der Verdrehwinkelamplitude ϕmax bei der zugehörigen
Drehzahl wird in eine MS-Excel-Datei eingetragen, es wird der Wert max1
ϕ⋅ 2
ausgewiesen, am Bildschirm werden die zugehörigen Winkelgeschwindigkeiten ΩA und ΩB
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Prüfstandsaufbau - 56 -
gemäß Bild 43 mit Hilfe des PAK-Cursors ermittelt und ebenfalls in die MS-Excel-Datei
eingefügt. Die im MS-Excel mit Hilfe der folgenden Gleichung errechneten
Dämpfungsgrade sind modale Größen und in Anlage 9 dargestellt.
ϖ⋅Ω−Ω
=2
D AB (Gl. 46)
ΩA [rad/s] untere Schranke Winkelgeschwindigkeit
ΩB [rad/s] obere Schranke Winkelgeschwindigkeit
Bild 43: Kenngrößen zur Ermittlung des Dämpfungsgrades mit dem Verfahren der
Halbwertsbreite [7]
6 Prüfstandsaufbau
Der zu untersuchende Motor wurde auf dem Motorenprüfstand der WHZ aufgebaut. Im
Vorfeld der Untersuchungen wurde der Steuertrieb des Audi-Fünfzylindermotors überholt,
dabei wurde der Torsionsschwingungsdämpfer demontiert und mit einem Dreifadenpendel
das Massenträgheitsmoment bestimmt. Die Belastungseinrichtung des Prüfstandes
(siehe Bild 44) wird mit Hilfe einer Elastikwelle mit dem Motor verbunden.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Prüfstandsaufbau - 57 -
Bild 44: Motorenprüfstand, aufgebaut mit Motor und Belastungseinrichtung
Für den Betriebsbereich des Motors muss sichergestellt sein, dass sich die Elastikwelle
nicht im Resonanzzustand befindet. Dieser kann sonst zur Zerstörung der Elastikwelle
infolge unzulässig großer Drehwinkelamplituden führen. Gemäß der Aufgabenstellung
wurden die Eingangsseite und die Ausgangsseite der Elastikwelle mit jeweils einer
Messstelle zur Drehschwingungsmessung versehen (siehe Bild 45).
Bild 45: Messstellen Elastikwelle GKN 228.40
Die Medien Wasser und Kraftstoff werden von der Konditioniereinrichtung des Prüfstandes
bereitgestellt und zusätzlich u. a. Öldruck, Öl- und Lufttemperatur mit dem Rechner am
Bedienpult überwacht. Am Bedienpult erfolgt die manuelle Steuerung der Belastungs-
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Prüfstandsaufbau - 58 -
einrichtung. Die konstruktive Ausführung der Belastungseinrichtung ermöglicht keinen
Schleppbetrieb des Motors. Für Drehschwingungsmessungen wäre dieses jedoch
wünschenswert. Mit der angeschlossenen Wirbelstrombremse wird die Drehbewegung
des Motors mit einem regelbaren elektromagnetischen Feld beeinflusst. Die entstehende
Wärme wird mit Hilfe einer Wasserkühlung abgeführt. Eine Umwandlung von elektrischer
Energie in mechanische Energie ist nicht möglich. Die Wirbelstrombremsen sind heute aus
modernen Motorenprüfständen völlig verdrängt und mit regelbaren Motor-Generator-
Belastungseinheiten besetzt.
Mit einem am Fahrpedalpotenziometer angeordneten Scheibenwischermotor wird über
einen Seilzug die Fahrpedalstellung nachgebildet. Ungeeignet ist die konstruktive
ischerarm und
Fahrpedalausleger die Übersetzung ändert. Mit den genannten Unwegsamkeiten sind
adaptiert (Anlage 2: Zeichnungen). An der
Primärmasse der Schwungscheibe wurde auf den Zahnkranz des Anlassers als
Impulsgeber und für das freie Ende der Kurbelwelle auf einen inkrementalen
Drehwinkelgeber zurückgegriffen.
Tabelle 9: Messstellen Motor
Ausführung, da sich je nach relativer Winkelstellung zwischen Scheibenw
keine definierten Rampenhochläufe mit diesem Prüfstand möglich. Mit der Routine und
dem Geschick des Prüfstandsbedieners konnten dennoch Rampenhochläufe manuell
dargestellt und mit dem PAK-Messsystem aufgezeichnet werden.
Zur Berechnung der Winkelgeschwindigkeit ϖ wurden Zahnscheiben für die jeweilige
Messstelle konstruiert und am Prüfstand
Messstelle Abkürzung im
Messsystem Zähnezahl Bemerkung/ Zeichnungsnummer
Torsionsschwingungsdämpfer TSD 60
60-2
Zahnscheibe 05_1140_ADS_201-0001(4)
Zahnscheibe 05_1140_ADS_201-0002(4)
freies Ende Kurbelwelle EImp 1 inkrementaler Geber
freies Ende Kurbelwelle frEKW 360 inkrementaler Geber
Primärmasse Schwungrad PSR 135 Zahnkranz Anlasser
Sekundärmasse Schwungrad/ 60 Zahnscheibe 05_1140_ADS_201-0003(4)
Eingang Elastikwelle SSR
60-2 Zahnscheibe 05_1140_ADS_201-0004(4)
Ausgang Elastikwelle AEla 60
60-2
Zahnscheibe 05_1140_ADS_201-0005(4)
Zahnscheibe 05_1140_ADS_201-0006(4)
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 59 -
Mit diesen äquidistanten Drehwinkelgebern und den applizierten Induktionssensoren ist es
möglich, die Zeitdifferenz von Zahn zu Zahn zu messen. Daraus kann mit Hilfe der
folgenden Gleichung die Drehzahl berechnet werden.
min1s60
t
U1n z
1iZi
⋅∆
=
∑=
tZi [s] Zeitdifferenz zwischen zwei Sensorimpulsen
(Gl. 47)
Z [-] Zähnezahl
∆
Aufgrund des Messprinzips der Induktionssensoren sind Drehzahlen n > 500 U/min
erfassbar. Kleinere Drehzahlen können wegen dem kleinen Verhältnis von Nutzsignal zu
Störsignal nicht erfasst werden. Es wurden zur Auswertung der Zeitdifferenzen von Zahn
zu Zahn die Nulldurchgänge der Sensorspannung herangezogen. Die Amplitude der
Sensorspannung wurde nicht ausgewertet.
Bild 46: Prinzipdarstellung Induktionssensor, kleine Drehzahl (violett) und große Drehzahl
(grün) [19]
7 n
Die Drehschwingungsmessung beruht auf d
r ein hwingke unter R essung bedeutet
hierbei die Aufzeichnung diskreter und äq istanter
d es Zeitabstandes von aufeina
W jede Eb (z.B. An nd Abtr
Impulsfolgen mit Zeitabständen in Rela zur W
Versuchsdurchführu g
er digitalen Messung eines sich einstellenden
elativen Verdrehwinkels er Sc tte otation. Digitale M
uid Winkelintervalle bzw. unter Rotation
ie Aufzeichnung d zwei nderfolgenden Impulsen bei festem
inkelintervall. Für ene - u iebsseite der Kupplung) entstehen
tion inkeländerung. Eine gleichförmige
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 60 -
Drehbewegung erzeugt eine Impulsfolge mit zeitlich konstanten Abständen. Ist der
gleichförmigen Drehbewegung jedoch eine periodische Winkeländerung überlagert, stellt
sich eine ungleichförmige Drehbewegung ein und damit eine Impulsfolge mit ungleichen
Zeitabständen (Bild 47).
tZi t =Zi tZi+1 t =tZi Zi+2
tZi t =tZi Zi+1 t =tZi Zi+2 t =tZi Zi+3
Bild 47: Abtastung äquidistanter Winkelintervalle bei gleichförmiger und ungleichförmiger
Drehbewegung
Es lässt sich mit Hilfe der folgenden Formel die momentane Winkelgeschwindigkeit
berechnen.
Zi
Z
t∆σ∆
=ω (Gl. 48)
äquidistantes Winkelintervall der Zahnscheiben
Der max. auftretende Fehler hängt dabei maßgeblich von der Winkelgenauigkeit der
er Anzahl der Zähne, dem Radius der Zahnscheiben und
der Zählfrequenz ab. Für die hergestellten Zahnscheiben wurde die max. Form- bzw.
Zσ∆ [rad]
äquidistanten Drehwinkelgeber, d
Lageabweichung der Zähne mit 0,1 mm vom Zulieferer angegeben. Im ungünstigsten Fall
(ein Zahn 0,1 mm schmaler und der nächste Zahn 0,1 mm breiter) ergibt sich eine
Winkelabweichung von σF = 0,00166 rad (Bild 48). Mit dieser und der kritischsten
Annahme max. Betriebsdrehzahl nmax = 4000 U/min (entspricht nmax = 67 U/s) kann der
maximale Fehler abgeschätzt werden. Die Periodendauer T einer Kurbelwellenumdrehung
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
Versuchsdurchführung - 61 -
beträgt (bei n = 67 U/s) T = 0,015 s. Es wird das Zeitintervall zwischen zwei Impulsen
gemäß der folgenden Gleichung bestimmt.
zTt Zi =∆ (Gl. 49)
∆tzi = 0,00025 s
Mit Hilfe der folgenden einfachen Verhältnisgleichung kann der absolute Fehler der
Winkelgeschwindigkeit berechnet werden.
s000004,0tttt
t)(t
F
ZiFF
z
ZiFzF
=∆∆−=∆σ
∆⋅σ+σ=
(Gl. 50)
tF [s] theoretische Periodendauer für einen Zahnabstand mit max. Fehler
∆tF [s] absolute zeitliche Abweichung von theoretischer Periodendauer für einen
Zahnabstand
srad9,3±=ϖ∆
tn2
F
F
∆σ
−⋅π⋅±=ω∆ (Gl. 51)
] absolute Abweichung der Winkelgeschwindigkeit
Die Ung en
Zählfrequenz von 50 MHz vernachlässigt werden. Der absolute Fehler der
Win ale Fehler beträgt ±1%. Der
σF [rad] mit max. Fehler behaftetes Winkelintervall
∆ω [rad/s
enauigkeiten infolge des Digitalisierungsfehlers können wegen der groß
kelgeschwindigkeit beträgt ± 3,9 rad/s und der prozentu
Fehler vergrößert sich mit steigender Ordnung, dies erschließt sich, denn die
Periodendauer wird kleiner. Bei n = 67 U/min beträgt ∆tz = 0,00025 s, für die 20. Ordnung
gilt:
s0000125,0t20tt
Z20.
ZZ20.
=∆
∆=∆
. (Gl. 52)
∆tZ20. [s] theoretische Periodendauer für einen Zahnabstand, 20. Ordnung der
Drehzahl
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 62 -
Der absolute Wert ∆tF = 0,000004 s bleibt infolge der unveränderten Zahngeometrie
gleich. Doch der prozentuale Fehler für die 20. Ordnung beträgt somit ±30%! Die Anzahl
der Zäh er
Messergebnisse. Für die Messstellen am Prüfstand wurden 60 Zähne gewählt, damit ist
KW bis zur 23. Ordnung beschreibbar. Eine Vergrößerung der Zähnezahl
och die Ordnungsauflösung sinkt. Die gewählte
Zähnezahl stellt einen guten Kompromiss von Ordnungsauflösung und Güte der
Messwerte dar. Diese Betrachtungen zeigen die Möglichkeiten und Grenzen der
Messdatenerfassun
Laserschneidtechnik bleibt das genaueste und dabei finanzierbare Verfahren.
ne bestimmt die darstellbare Ordnungsauflösung und beeinflusst die Güte d
die Drehzahl der
steigert die Ordnungsauflösung aber die Güte der Messwerte sinkt. Mit Verringerung der
Zähnezahl steigt die Güte der Messwerte d
g mit Zahnscheiben. Die Herstellung der Zahnscheiben mit Hilfe der
m der Vielzahl der Messungen gemäß der Aufgabenstellung gerecht zu werden, wurde
eichert und die erste Messung zur Analyse herangezogen.
Bild 48: Maximale Winkelabweichung der Zahnscheibe TSD
U
das Messprogramm gemäß Tabelle 10 erstellt. Die Abkürzungen der Messpunkte haben
die Bedeutung gemäß Tabelle 9 und lassen sich in den PAK-Messdateien als Dateiname
wiederfinden. Zur Abschätzung der Qualität der Messungen wurde jeder Versuch
wiederholt. Während der Wiederholungsmessung wurde der erste Versuch der Online-
Anzeige hinterlegt. Bei deckungsgleichen Graphen wurde die zweite Messung nicht
gesp
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 63 -
Tabelle 10: Messprogramm
Messprogramm
Nulllastbeschleunigung 800U/min-4000U/min Volllastbeschleunigung 800U/min-4000U/min
Messung 1 EImp TSD Messung 6 EImp TSD
Messung 2 EImp frEKW Messung 7 EImp frEKW
Messung 3 EImp PSR Messung 8 EImp PSR
Messung 4 EImp SSR Messung 9 EImp SSR
Messung 5 EImp AEla Messung 10 EImp AEla
Das PAK MKII wurde im Motorenprüfstand aufgestellt und mit einem Netzwerkkabel mit
dem PAK-Rechner am Bedienpult verbunden. Am PAK MKII wurden die Kanäle 13
(Zylinderdruck), 15 und 16 (Drehzahleingänge) verwendet. Die Kanäle 15 und 16 sind
Tachokanäle, welche mit 50 MHz abgetastet werden.
Die gesamten digitalen Messdaten der Drehschwingungsvorgänge werden rationell
während eines Rampenhochlaufes über den Betriebsdrehzahlbereich gewonnen.
Theoretisch wäre dazu eine unendlich große Zeitspanne vonnöten. Praktisch gelten die
folgenden Zusammenhänge.
Die Wahl der geeigneten Anzahl von diskreten Stützstellen (digitale Messwerte, sog.
r das Gelingen der Messung
equenz müssen vor der
Abtastung mit einem (analogen) Tiefpass-Filter aus dem Signal entfernt werden, da es
sonst zu Artefakten kommt. Die Entfernung dieser Anteile führt zu einer Veränderung des
Signals und sollte nur angewendet werden, wenn diese Änderung unwesentlich ist oder
eine Erhöhung der Abtastfrequenz nicht in Frage kommt. Die Artefakte sind Alias-Signale
(Störsignale, Pseudosignale), die sich als störende Frequenzanteile bemerkbar machen.
Wird zum Beispiel ein Sinussignal, das eine Frequenz von 1600 Hz hat, mit einer
Samples) setzt Erfahrung voraus. Notwendige Bedingung fü
ist das Einhalten des Abtasttheorems. Das Abtasttheorem besagt, dass ein
kontinuierliches, bandbegrenztes Signal mit einer Minimalfrequenz von 0 Hz und einer
Maximalfrequenz fmax, mit einer Frequenz größer als 2⋅fmax abgetastet werden muss, damit
man aus dem so erhaltenen zeitdiskreten Signal das Ursprungssignal ohne
Informationsverlust (aber mit unendlich großem Aufwand) rekonstruieren bzw. (mit
endlichem Aufwand) beliebig genau approximieren kann. Eventuell enthaltene
Signalanteile mit einer Frequenz größer der halben Abtastfr
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 64 -
Abtastfrequenz von 2000 Hz digitalisiert, erhält man ein 400 Hz Alias-Signal (2000 Hz bis
entsteht dagegen kein Alias-Signal. Eine
Abtastfrequenz von zum Beispiel 3300 Hz führt zu einem Differenzsignal von 1700 Hz
( do und wird
demnach bei der Rekonstruktion durch einen T ass e t. In der P gibt es
(prinzipiell aus Gründen der K lität) k len T ss. Er hat immer einen
ge erga reich zw n pra er D ng im Durc bereich
und praktisch vollständiger Dä g im ich. verwendet man in der
raxis größere Faktoren des Abtasttheorems. Der verwendete Faktor ist abhängig vom
gung steigt jedoch. Trotzdem wird
berabtastung (oversampling) häufig angewendet [24].
ollte. In der Praxis wird bei sensiblen Messungen dennoch
berabgetastet, da so auch eventuelle Nachauswertungen von Zeitrohdaten mit größerer
1600 Hz). Bei einer Abtastfrequenz über 3200 Hz
3300 Hz bis 1600 Hz). Dieses ist je ch größer als die halbe Abtastrate
iefp ntfern raxis
ausa einen idea iefpa
wissen Üb ngsbe ische ktisch kein ämpfu hlass
mpfun Sperrbere Daher
P
verwendeten Tiefpassfilter und von der benötigten Dämpfung der Alias-Signale.
Gebräuchliche Faktoren sind 2,4 (DAT, DVD) und 2,56 (FFT-Analysatoren). Wenn man
eine höhere Abtastfrequenz wählt, erhält man keine zusätzlichen Informationen. Der
Aufwand für Verarbeitung, Speicherung und Übertra
Ü
Für die Drehschwingungsmessungen am Prüfstand sind aus der Erfahrung des Verfassers
keine größeren Frequenzen als fmax ≤ 4 kHz interessant, daraus folgt, dass die Abtastrate
fAbtast = 10,24 kHz betragen s
ü
Abtastfrequenz möglich sind. Für die Messung ist im Allg. die Drehzahlspanne für die
Untersuchung der Drehschwingungsvorgänge (Betriebsdrehzahlbereich) vorgegeben. Mit
dieser Drehzahlspanne und der zu parametrierenden Drehzahlschrittweite ∆n wird die Zeit
für einen idealen Rampenhochlauf vorgegeben. Gemäß den Einstellwerten in Bild 49
ergibt sich folgende Anzahl der Messstufen mMess:
nnn
m minmaxMess ∆
−= . (Gl. 53)
mMess [-] Anzahl der Messstufen
∆n [U/min] Drehzahlschrittweite
320mmin/U10
min/U800min/U4000m
Mess
Mess
=
−=
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 65 -
Bild 49: Messeinstellung PAK-Messsystem
Die einzuhaltende Dauer für d ung der Messstufen ist von der geforderten
Frequenz- bzw. Ordnungsauflösung abhängig. Die eingestellte Abtastrate hat keinen
Einfluss auf die einzuhaltende Dauer des Rampenhochlaufes, sie bestimmt lediglich die
auswertbare Maximalfrequenz f
ie Erfass
wird die Amplitude des Messkanals falsch dargestellt. Die darstellbare Zeit- bzw.
Mit den errechnete Hz
rehzahlhochlauf wie folgt berechnet:
max und den Speicherbedarf der Messdatendatei. Dies ist
erklärbar, weil im gleichen Maß wie die Abtastung auch die Blockgröße steigt. Bei zu
kleiner Messdauer für eine Messstufe wird diese nicht bzw. nicht richtig ermittelt, im Allg.
Drehzahlauflösung wird kleiner.
n Messstufen mMess und der eingestellten Frequenzauflösung ∆f = 2
gemäß Bild 50 wird die Zeit tMess für einen D
f1mt MessMess ∆
⋅= . (Gl. 54)
Mess = 160 s. Zur Erfassung aller Messstufen muss der
Drehzahlhochlauf linear erfolgen. Die eingestellte Schrittweite ∆n ist die für die
Datenauswertung max. darstellbare Drehzahlauflösung. Die gewählte Frequenzauflösung
f stellt die für die Datenauswertung max. darstellbare Frequenzauflösung dar. Die
Entschärfung des Konfliktes Messdauer zu darstellbarer Genauigkeit obliegt dem
Messdurchführenden.
Für das Beispiel beträgt die Zeit t
∆
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 66 -
Gemäß der Aufgabenstellung sollte ein Drehzahlrunterlauf von 4000 U/min bis zum
Stillstand (ohne Kraftstoffeinspritzung) des Fünfzylinder-Dieselmotors untersucht werden.
Die Dauer eines solchen Drehzahlrunterlaufes beträgt tMess ≈ 25 s. Aus den obigen
Gleichungen ist damit eine Frequenzauflösung von ∆f = 160 Hz darstellbar. Deshalb
wurden diese Messungen nicht durchgeführt.
Für die Ermittlung von Ordnungsspektren ist die zur richtigen Erfassung der Messstufen
einzuhaltende Messdauer nicht konstant. Wegen der konstanten Blockdauer
(Umdrehungen) ist für kleine Drehzahlen eine größere Messdauer als für große
Drehzahlen notwendig. Üblicherweise wird dennoch ein linearer Drehzahlhochlauf an der
Prüfstandssteuerung eingestellt. Die Messdauer wird gemäß folgender Gleichung
errechnet:
OrdminU
mt MessMess ⋅= . n
s60
min ∆⋅ (Gl. 55)
inander verschachtelt aufgezeichnet und analysiert. Die
pektren dürfen nicht gemittelt werden!
∆Ord [-] Ordnungsauflösung
Für das Beispiel beträgt die Zeit tMess = 240 s. Die maximal auswertbare Ordnung ist
genauso groß wie die Zähnezahl Z der Zahnscheibe geteilt durch 2,56.
Kann die erforderliche Messzeit bzw. der lineare Drehzahlhochlauf nicht gewährleistet
werden, so kann mit Hilfe der Überlappung versucht werden, die Qualität der Messung zu
verbessern. Die Messstufen werden dabei nicht nacheinander ermittelt, sondern die
Messstufen werden zeitlich ine
S
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 67 -
Bild 50: Karteikarte FFT-Para
meter PAK-Messsystem
Bild 51: Karteikarte Ordnungs-Parameter PAK-Messsystem
Versuche, die relative Lage der Zahnscheiben zueinander mit Hilfe einer definierten
Fehlstelle zu ermitteln, schlugen fehl. Prinzipiell sollten aus dem „fehlerhaften“ Signal mit
Hilfe der PAK-Funktion „Pulseditor“ die Zahnlücke geschlossen und ein neuer Kanal mit
einem Einzelimpuls generiert werden (siehe Anlage 2).
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 68 -
Die Messungen sollten mit Hilfe der PAK-Funktion „Zusammenfassung von Messungen“
zusammengesetzt werden. So wären alle Drehwinkel der Messpunkte in einer Messdatei
winkelrichtig vorhanden. Diese prinzipielle Vorgehensweise konnte trotz mannigfaltiger
Versuche nicht dargestellt werden. Da kein Triggersignal zur OT-Markierung vorhanden
war, mussten mit Hilfe der jeweils gemessenen Zylinderdruckmaxima die Graphen der
Winkelgeschwindigkeit justiert werden. Die Graphen der unterschiedlichen Messungen
wurden solange auf der Abszisse verschoben, bis die gemessenen Zylinderdruckverläufe
zeitgleich ihr Maximum erreichten.
Wegen der kleinen Eigenfrequenz der Elastikwelle und den damit verbundenen Problemen
bei der Erfassung von kleinen Drehzahlen wurden die Messungen ersatzweise an einem
Vierzylinder-Dieselmotor vorgenommen. An diesem wurde das Messsystem „Mehrkadreh“
mit Zahnscheiben und Gabellichtschranken appliziert.
wertung der Messungen und die grafische Darstellung erfolgten mit der PAK-
heit der erzeugten Diagramme in dieser Arbeit darzustellen,
gelingt beim besten Willen nicht, da weit über eintausend dieser Diagramme entstanden
sind. Die ausgewählten Diagramme wurden als Grafiken exportiert und in die Arbeit
eingepflegt.
7.1 Messung Tilgermasse TSD
Die Messergebnisse des Drehzahlhochlaufes für den Drehzahlbereich von n = 800 U/min
bis n = 4000 U/min für NL und VL sind in den folgenden Bildern dargestellt. Dabei stellt
das jeweilige obere Diagramm die Graphen der betrachteten Ordnungen über der
Drehzahl dar. Aus diesen wurde mit Hilfe des Verfahrens der Halbwertsbreite der modale
Dämpfungsgrad ermittelt. Das untere Diagramm zeigt das gemessene
Resonanzschaubild. Daraus können die Resonanzfrequenzen an der linken Ordinate
abgelesen werden. Zur besseren Verständlichkeit ist in Bild 52 die prinzipielle
ur Ermittlung des modalen
Die Aus
Grafik-Definition. Die Gesamt
Vorgehensweise angegeben. Die relevanten Punkte z
Dämpfungsgrades und die Eigenfrequenzen sind dargestellt. Außerdem wird der Einfluss
eines Fehlers (n ≈ 3600 U/min) bei der Drehzahlerfassung sichtbar.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 69 -
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
1000 1500 2000 2500 3000 3500 40001/min0
100
200
300
400
500
Hz
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
Grad
2.5
5
7.5101000 1500 2000 2500 3000 3500 40001/min
0.00
0.05
0.10
0.15
0.20
GradMa_NL_800-4000_TSD
2.00 2.50 3.00 3.50 4.00 4.50 5.00 5.50 6.00 6.50 7.00 7.50 8.00 8.50 10.00 15.00
Bild 52: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl (oben) und
Resonanzschaubild (unten), TSD, NL
Es werden die Eigenfrequenzen 261 Hz, 310 Hz und 400 Hz aus dem Resonanzschaubild
abgelesen.
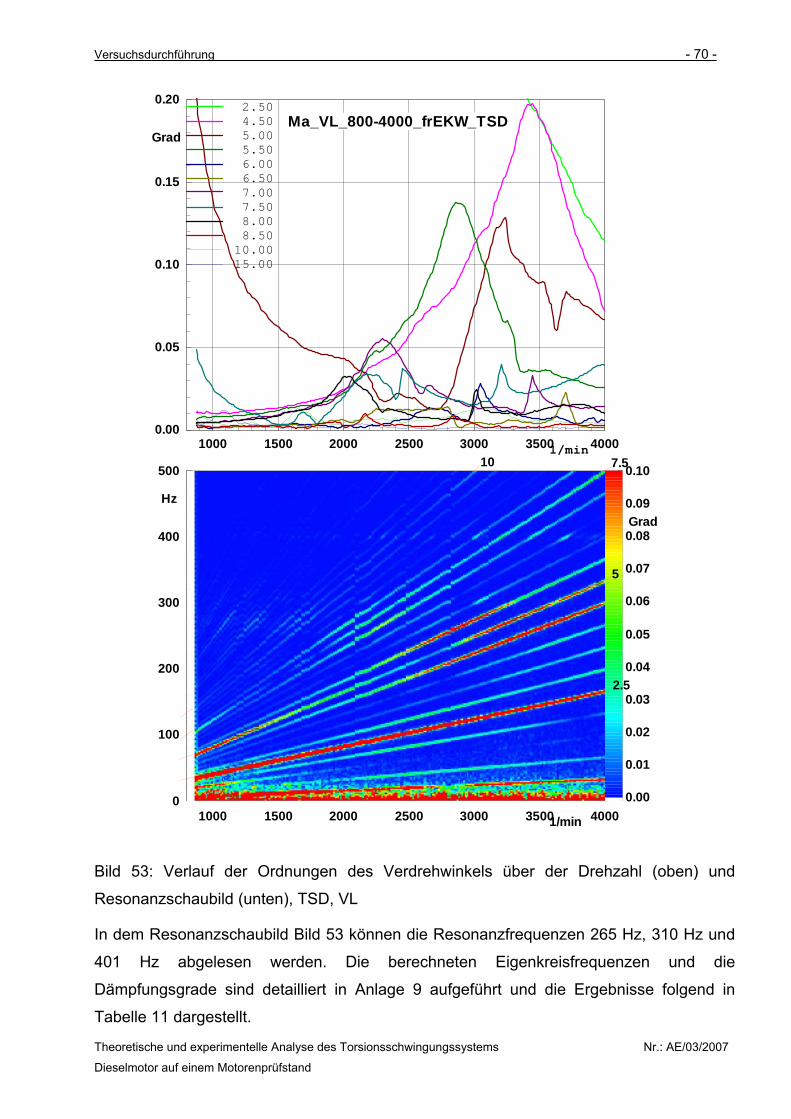
Versuchsdurchführung - 70 -
1000 1500 2000 2500 3000 3500 40001/min0
100
200
300
400
500
Hz
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
Grad
2.5
5
7.5101000 1500 2000 2500 3000 3500 40001/min
0.00
0.05
0.10
0.15
0.20
GradMa_VL_800-4000_frEKW_TSD
2.50 4.50 5.00 5.50 6.00 6.50 7.00 7.50 8.00 8.50 10.00 15.00
Bild 53: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl (oben) und
Resonanzschaubild (unten), TSD, VL
In dem Resonanzschaubild Bild 53 können die Resonanzfrequenzen 265 Hz, 310 Hz und
401 Hz abgelesen werden. Die berechneten Eigenkreisfrequenzen und die
Dämpfungsgrade sind detailliert in Anlage 9 aufgeführt und die Ergebnisse folgend in
Tabelle 11 dargestellt.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 71 -
Tabelle 11: Ermittelte Dämpfungsgrade D bei unterschiedlichen Eigenkreisfrequenzen ω,
Messstelle TSD
Lastzustand ω [rad/s] D [-] ω [rad/s] D [-]
NL 1642 0,083 2523 0,010
VL 1663 0,072 2528 0,014
Mittelwert 1653 0,078 2526 0,012
Der Zusammenhang zwischen Eigenkreisfrequenz, Drehzahl und Ordnung wird gemäß
der folgenden Gleichung hergestellt:
60xn2 gem
m
⋅⋅π⋅=ϖ . (Gl. 56)
ngem [U/min] im gemessenen Resonanzschaubild ermittelte Resonanzdrehzahl
7.2 Messung freies Ende KW
Die Messungen am freien Ende der Kurbelwelle wurden analog Abschnitt 7.1
durchgeführt. An der Nabe des TSD wurde ein inkrementaler Drehwinkelgeber der Fa.
COM appliziert. Die Messergebnisse sind in Bild 55 (NL) und Bild 56 (VL) dargestellt.
Bild 54: Drehwinkelgeber am freien Ende der Kurbelwelle
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 72 -
1000 1500 2000 2500 3000 3500 40001/min0
100
200
300
400
500
Hz
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
Grad
2.5
5
7.5101000 1500 2000 2500 3000 3500 40001/min
0.05
0.10
0.15
0.20
0.00
GradMa_NL_800-4000_frEKW_overlap
2.50 4.00
4.50 5.00 5.50 6.00 6.50 7.00 7.50 8.00 8.50 10.00
15.00
Bild 55: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl (oben) und
Resonanzschaubild (unten), frEKW, NL
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 73 -
1000 1500 2000 2500 3000 3500 40001/min0
100
200
300
400
500
Hz
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
Grad
2.5
5
7.5101000 1500 2000 2500 3000 3500 40001/min
0.00
0.05
0.10
0.15
0.20
GradMa_VL_800-4000_frEKW_TSD
2.50 4.50 5.00 5.50 6.00 6.50 7.00 7.50 8.00 8.50 10.00 15.00
Bild 56: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl (oben) und
Resonanzschaubild (unten), frEKW, VL
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 74 -
Tabelle 12: Ermittelte Dämpfungsgrade D bei unterschiedlichen Eigenkreisfrequenzen ω,
Messstelle frEKW
Lastzustand ω [rad/s] D [-] ω [rad/s] D [-] ω [rad/s] D [-]
NL 1642 0,071 - - 2523 0,010
VL 1666 0,071 1924 0,022 - -
Mittelwert 1654 0,071 1924 0,022 2523 0,010
In Bild 55 zeigt der Graph der 5. Ordnung die Aufspaltung der Eigenkreisfrequenz der
Kurbelwelle in eine kleinere ω = 1653 rad/s und eine größere ω = 2526 rad/s. Die von der
5. Ordnung angeregte Eigenkreisfrequenz ω = 1924 rad/s wird infolge des
Vorhandenseins des TSD deutlich verkleinert.
7.3 Messung Primärmasse Schwungrad
An der Primärmasse des Schwungrades wurden die Zähne des Anlasserzahnkranzes als
äquidistante Drehwinkelgeber genutzt. Die Ergebnisse der Messungen sind in Bild 57 und
Bild 58 sowie die ermittelten Eigenkreisfrequenzen und Dämpfungsgrade in Tabelle 13
dargestellt.
Tabelle 13: Ermittelte Dämpfungsgrade D bei unterschiedlichen Eigenkreisfrequenzen ω,
Messstelle PSR
Lastzustand ω [rad/s] D [-] ω [rad/s] D [-]
NL 1628 0,076 3221 0,046
Mittelwert 1628 0,076 3221 0,046
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 75 -
1000 1500 2000 2500 3000 3500 40001/min0
100
200
300
400
500
Hz
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
Grad
2.5
5
7.5101000 1500 2000 2500 3000 3500 40001/min
0.00
0.05
0.10
0.15
0.20
GradMa_NL_800-4000_PSR
2.00 2.50 3.00 3.50 5. 7.50 8.00
4.00 4.505.00
506.006.507.00
8.50 10.00 15.00
Bild 57: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl (oben) und
Resonanzschaubild (unten), PSR, NL
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
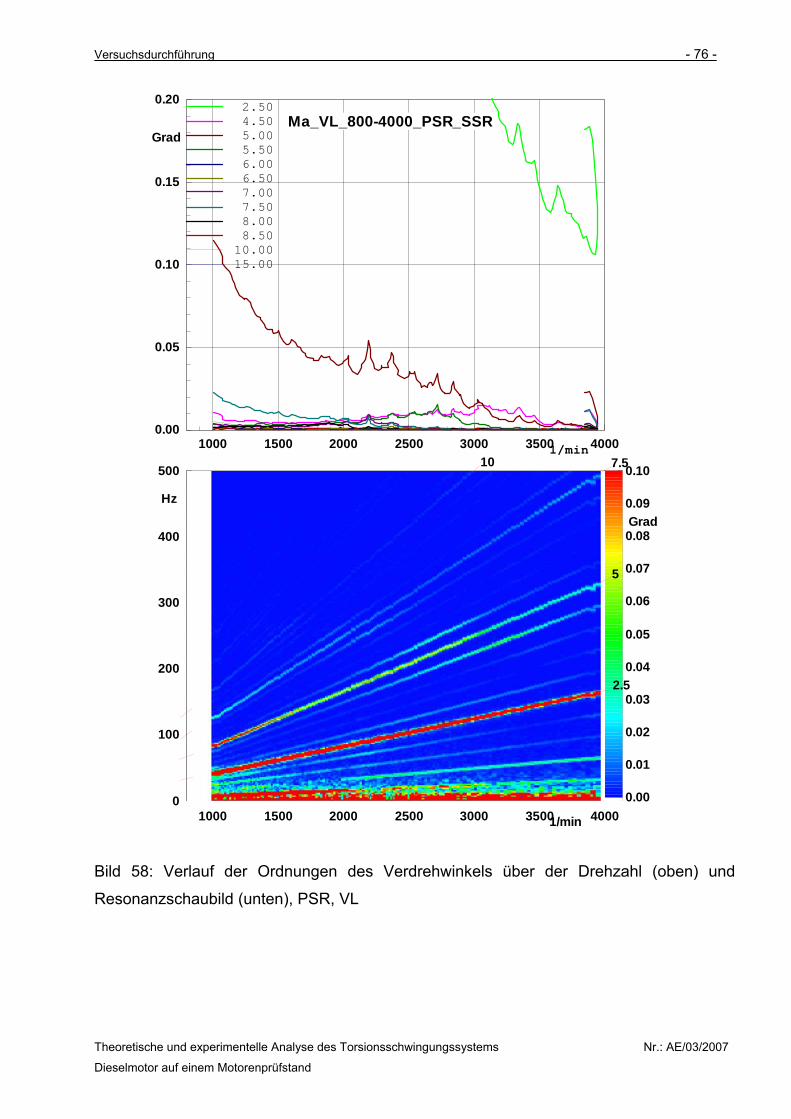
Versuchsdurchführung - 76 -
1000 1500 2000 2500 3000 3500 40001/min0
100
200
300
400
500
Hz
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
Grad
2.5
5
7.5101000 1500 2000 2500 3000 3500 40001/min
0.00
0.05
0.10
0.15
0.20
GradMa_VL_800-4000_PSR_SSR
2.50 4.50 5.00 5.50 6.00 6.50 7.00 7.50 8.00 8.50 10.00 15.00
Bild 58: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl (oben) und
Resonanzschaubild (unten), PSR, VL
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 77 -
7.4 Messung Sekundärmasse Schwungrad
Die Messungen an der Sekundärmasse des Schwungrades erbrachten keine gesicherten
Aussagen zu Eigenfrequenz und Dämpfung. Exemplarisch ist das Resonanzschaubild
(NL) in Bild 59 dargestellt. Auf weitere Untersuchungen an der Sekundärmasse der
Schwungscheibe musste aus o.g. Gründen verzichtet werden.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
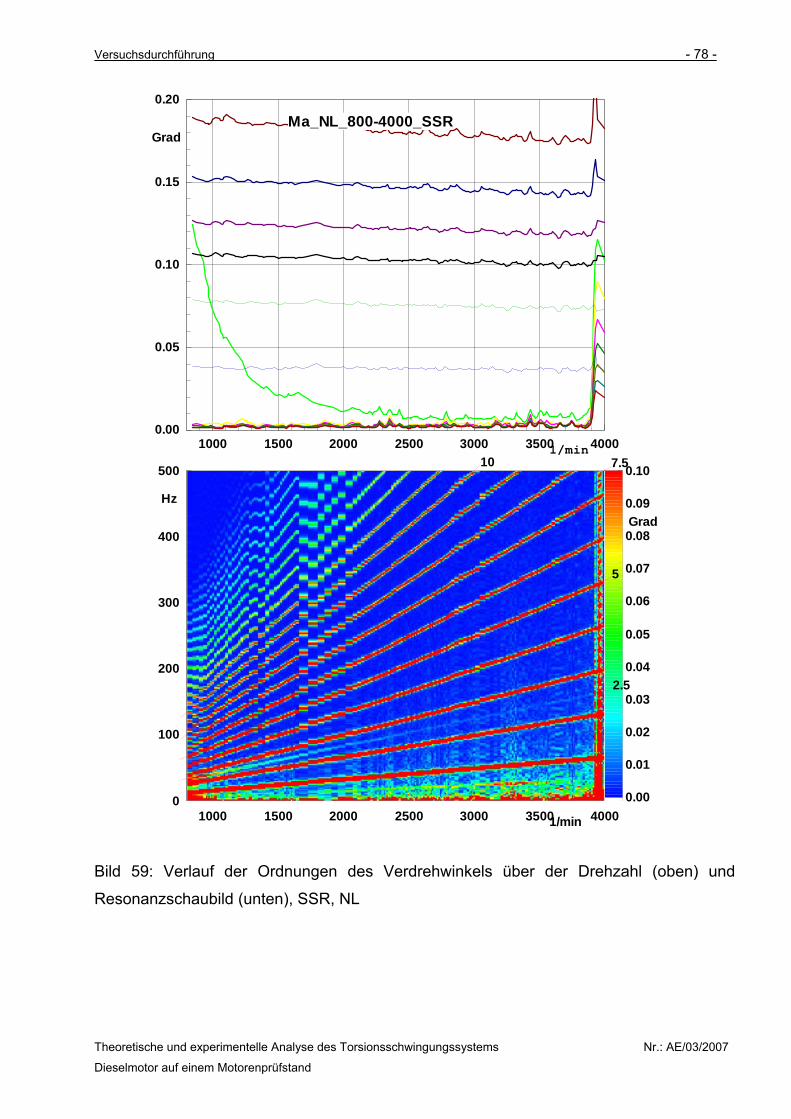
Versuchsdurchführung - 78 -
1000 1500 2000 2500 3000 3500 40001/min0
100
200
300
400
500
Hz
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
Grad
2.5
5
7.5101000 1500 2000 2500 3000 3500 40001/min
0.00
0.05
0.10
0.20
Grad
0.15
Ma_NL_800-4000_SSR
Bild 59: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl (oben) und
Resonanzschaubild (unten), SSR, NL
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 79 -
7.5 Messung Elastikwelle (Vierzylinder-Dieselmotor)
Die Messungen an der Elastikwelle am Fünfzylinder-Dieselmotor verliefen nicht
erfolgreich, die Ergebnisse der Messungen waren nicht interpretierbar. Die Ursache ist in
der ungleichen Lagerung des Motors und der Belastungseinrichtung zu suchen. Der Motor
kann in den elastischen Motorlagern Relativbewegungen zum Fundament ausführen. Die
Belastungseinrichtung ist fest mit dem Fundament verbunden. Die Taumelbewegungen
des Motors (infolge des Vorhandenseins der Massenkraftmomente) beeinflussen das
Messsystem, deshalb konnten die Drehschwingungen am Eingang der Elastikwelle nicht
sicher detektiert werden. Die Drehschwingungsamplituden am Eingang der Elastikwelle
sind außerdem vernachlässigbar, denn als Tiefpassfilter wirken vor allem das ZMS und die
Elastikwelle selbst.
Zeitgleich musste auf einem anderen Motorenprüfstand der WHZ für die Elastikwelle der
Festigkeitsnachweis geführt werden. Dazu dürfen die vom Hersteller angegebenen max.
zulässigen Drehmomente im Betrieb nicht überschritten werden. Bei dem Prüfling handelt
es sich um den Typ 228.30 der Fa. GKN. Die technischen Daten sind auszugsweise in
Tabelle 14 dargestellt.
Tabelle 14: Technische Daten Elastikwelle GKN 228.30
Eigenschaft Wert
max. zulässiges Drehmoment [Nm] 680 (kurzzeitig 816)
Masse [kg] 13,1
MTM der gesamten Welle [kgm2] 0,0354
MTM des Schaftes [kgm2] 0,0034
Torsionssteifigkeit der Gesamtwelle [Nm/rad] 900
Dämpfungsgrad [-] 0,065
Die Elastikwelle wird überkritisch betrieben. Im Betriebsdrehzahlbereich sollte die
Resonanzfrequenz der Elastikwelle nicht angeregt werden. Nur während des
her Belastung (Motordrehmoment) und
Wechseldrehmoment (Drehschwingung) überlagern sich. Mit Hilfe der Messung des
relativen Verdrehwinkels der Elastikwelle lässt sich das Torsionsmoment der Elastikwelle
darstellen. Dazu wurden am prüfstandsfesten Wellenschutz der Elastikwelle zwei
Messstellen angebracht. Mit Hilfe der adaptierten Zahnscheiben und der angebrachten
Startens/Stillsetzens des Prüfstandes kommt es zu Resonanzdurchläufen. Die
Drehmomente aus quasistatisc
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 80 -
Gabellichtschranken konnten die Zeitdifferenzen zwischen den Impulsen mit dem
Messsystem „Mehrkadreh“ aufgezeichnet werden. Das Messsystem „Mehrkadreh“ kann
Drehzahlen ab nmin = 10 U/min aufzeichnen. Die Zählfrequenz beträgt 2,5 MHz, damit
können auch Drehzahlen von nmax = 2500 U/min bis zur 20. Ordnung ausgewertet werden.
Die Gabellichtschranken konnten am Wellenschutz verschoben und so zueinender mit
Hilfe eines Oszilloskopes justiert werden.
Für die Auslegung der Elastikwelle wird von der Fa. GKN die folgende Gleichung
angegeben:
Nm1750Terf =
T
2,1)5,3
erf . (Gl. 57)
tor der Arbeitsmaschine 3,5 (Motorenprüfsand)
mentes der Elastikwelle bereitet
A Sorge, denn dieses ist ca. 2 al größer als das Nenndrehmoment der
e 228.30.
Elastikwelle sollten die Zweifel zerstreut werden.
Die Eigenk mit Hilfe des Programms „MathCAD“ zu
ω chnet. Daraus lässt sich lgender Gleichung die Resonanzdrehzahl
erechnen.
5,2(Nm350T
2,1)2K1K(MT d
erf
+⋅=
+⋅=
erf [Nm] erforderliches Nenndrehmoment der Elastikwelle
Md [Nm] Motordrehmoment
K1 [-] Betriebsfaktor der Kraftmaschine 2,5 (Vierzylinder-Dieselmotor)
K2 [-] Betriebsfak
Die Größe des errechneten erforderlichen Nenndrehmo
nlass zur ,5-m
ingebauten Elastikwelle GKN Mit den Drehschwingungsmessungen an der
reisfrequenz der Elastikwelle wurde
1 = 55 rad/s bere mit fo
b
H
mgem x2
60n⋅π⋅⋅ϖ
=
Mit der hauptkritischen Ordnung xH = 2 für Vierzylinder-Viertaktmotoren und der
berechneten Eigenfrequenz der Elastikwelle wird die Drehzahl zu ngem = 260 U/min
berechnet. Mit den Messungen an der Elastikwelle sollte diese nachgewiesen werden.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 81 -
Die entstehenden Torsionsmomente infolge der Drehungleichförmigkeit des Vierzylinder-
Dieselmotors lassen sich wie folgt berechnen:
TEla2Z
1ZZZdW c
ttM ⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛∆
∆⋅σ∆−σ∆= . Gl. 58)
M
(
Elastikwelle
s wird die Zeit für das Überstreichen eines Winkelintervalls am Motor mit der Zeit des
s entstehen „Momentaufnahmen“ der Verdrehwinkel, die multipliziert mit der
Verdrehsteifigkeit der Elastikwelle das momentane Wechseldrehmoment darstellen. Zur
Probe werden nach 60 Intervallen (eine volle Umdrehung) die mittleren
Winkelgeschwindigkeite h.
Die Vorgehensweise zur Ermittlung der relativen Verdrehwinkel/Wechseldrehmomente ist
Motordrehmomentes kann
geg den. Dazu sind Einzelimpulse an jeder Zahnscheibe
lrunterlaufes
aftstoffzufuhr des
otors unterbrochen und nach weiteren 25 Umdrehungen ist der Motor zum Stillstand
dW [Nm] Wechseldrehmoment
cTEla [Nm/rad] Torsionssteifigkeit der
E
Überstreichens des korrespondierenden Winkelintervalls an der Bremse im Verhältnis
betrachtet. E
n am Motor und an der Bremse berechnet, beide sind stets gleic
somit richtig. Die Größe der statischen Verdrehung infolge des
hin en nicht ausgewertet wer
vonnöten. In Bild 60 ist das Wechseldrehmoment während eines Drehzah
dargestellt. Nach ca. zwölf der dargestellten Umdrehungen wird die Kr
M
gekommen. Bei Umdrehung 35 tritt Resonanz auf.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 82 -
0
200
400
0 5 10 15 20 25 30 35
Umdrehungen [-]
Dre
hzah
0
100
200
300
Wec
hsel
dreh
600
l [1
800
400
500
700
mom
ent [
Nm
]
1000
800
600
/min
]
Drehzahl MotorDrehzahl BremseWechseldrehmoment
as Ergebnis der Messung bestätigt die
Werte der Resonanzdrehzahl-Rechnung und zeigt die Einhaltung des max. zulässigen
Wertes des Drehmomentes der Elastikwelle an.
Bei der max. zulässigen Belastung der Elastikwelle beträgt die relative Verdrehung ca. 50°!
Für die Messung der Drehschwingung bei Volllast wurden unterschiedliche stationäre
Drehzahlen untersucht. Das gemessene Wechseldrehmoment wird dem quasistatischen
Motordrehmoment überlagert. Die Ergebnisse der Messungen sind in Bild 61 dargestellt.
Bild 60: Darstellung der Drehzahl und des Wechseldrehmomentes bei einem
Drehzahlrunterlauf des Vierzylinder-Dieselmotors von n = 1000 U/min bis n = 0 U/min
Die max. Amplitude des Wechseldrehmomentes beträgt 320 Nm bei einer Motordrehzahl
von ca. 270 U/min. Die rechte Ordinate ist bis 800 Nm skaliert, das entspricht dem max.
zulässigen Wechseldrehmoment der Elastikwelle. D
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 83 -
0
100
200
300
400
500
600
0 60 120 180 240 300
Zähne (60 Zähne entsprechen 1 Umdrehung) [-]
Dre
hmom
ent [
Nm
]Drehmoment_800_U/min_100Nm
Drehmoment_1000_U/min_250Nm
Drehmoment_2200_U/min_316Nm
Drehmoment_1600_U/min_350Nm
Bild 61: Verlauf der Drehmomente mit überlagerten Wechseldrehmomenten der
Elastikwelle über fünf KW-Umdrehungen bei VL, unterschiedliche Drehzahlen
Auch hier wird die Einhaltung des max. zulässigen Drehmomentes deutlich. Da es sich um
Dauerbelastungen der Elastikwelle handelt, wurde die Ordinate auf den max. zulässigen
Wert des Dauerdrehmomentes von 680 Nm skaliert.
In Bild 62 ist der Startvorgang mit Hilfe des am Motor angebrachten Starters dargestellt.
uch hier werden die max. zulässigen Werte des Wechseldrehmomentes deutlich A
unterschritten.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 84 -
-150
-100
-50
0
50
100
150
0 300 600 900 1200
Zähne (60 Zähne entsprechen 1 Umdrehung) [-]
Wec
hsel
dreh
mom
ent [
Nm
]
0
100
200
300
400
500
600
700
800
900
1000
Dre
hzah
l [U
/min
]
Wechseldrehmoment_Anlassen_ohne_Kraftstoff
Wechseldrehmoment_Anlassen_warm
Drehzahl_Motor_Anlassen_warm
Bild 62: Startvorgang des Vierzylinder-Dieselmotors, Wechseldrehmomente und Drehzahl
des Motors
Der Betrieb der Elastikwelle GKN 228.30 in Verbindung mit dem Vierzylinder-Dieselmotor auf dem untersuchten Motorenprüfstand ist unkritisch.
Nachfolgend ist in Bild 63 der Verlauf der Ordnungen des Verdrehwinkels über der
em = 1177 U/min wird die Eigenkreisfrequenz zu ω1 = 61,5 rad/s berechnet.
ie theoretischen und die mit Hilfe von Messungen gewonnenen Werte stimmen sehr gut
überein.
Drehzahl und das Resonanzschaubild dargestellt. Es wurde an der Belastungseinrichtung
ein konstantes Belastungsmoment von 30 Nm eingestellt. Mit der Resonanz der 0,5.
Ordnung bei ng
D
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Versuchsdurchführung - 85 -
800 1000 1200 1400 1600 1800 2000 22001/min0
500
Hz
0.00
0.01
100
200
300
400
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
Grad
800 1000 1200 1400 1600 1800 2000 22001/min
0.0
0.1
0.2
0.3
0.4
0.5
GradHL_800Umin-2400Umin_30Nm_2
0.50 1.00 2.00 4.00 6.00 8.00 9.00 10.00
Bild 63: Verlauf der Ordnungen des Verdrehwinkels über der Drehzahl (oben) und
Resonanzschaubild (unten), AEla, 30 Nm Belastung
Mit der Resonanz der 0,5. Ordnung (roter Graph) wurde der Dämpfungsgrad mit Hilfe des
Verfahrens der Halbwertsbreite zu D = 0,09 bestimmt.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Darstellung und Auswertung der Ergebnisse - 86 -
8 Darstellung und Auswertung der Ergebnisse
Gemäß der Aufgabenstellung wurden die theoretischen Grundlagen für die Berechnung
der Torsionsschwingungen erarbeitet. Es konnte das Torsionsschwingungssystem
Dieselmotor-Motorenprüfstand als Modell erfasst und dargestellt werden. Mit Hilfe der
Matrizenmethode wurden die Eigenkreisfrequenzen und Eigenschwingformen des
Torsionsschwingungssystems ermittelt. Die Resonanzschaubilder konnten für die
unterschiedlichen Bildwellen entwickelt werden. Nachfolgend sind die
Resonanzschaubilder der Rechnung und der Messung gegenüber gestellt.
1.2.2,5.
5.
7,5.
10.
12,5.
15.
17,5.
20.
22,5.
25.
27,5.
30.
0
2000
4000
6000
8000
10000
12000
14000
0 500 1000 1500 2000 2500 3000 3500 4000 4500
n [U/min]
ω [r
ad/s
]
Untersuchungsbereich
Bild 64: berechnetes Resonanzschaubild für das Torsionsschwingungssystem
Dieselmotor-Motorenprüfstand
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Darstellung und Auswertung der Ergebnisse - 87 -
1.2.2,5.4,5.5.
7,5.
10.
12,5.
15.
17,5.
20.
22,5.
25.
2000
4000
6000
8000
10000
12000
ω [r
ad/s
]27,5.
30.
5,5.
00 500 1000 1500 2000 2500 3000 3500 4000 4500
n [U/min]
Bild 65: aus Messergebnissen der Drehschwingungsmessungen entwickeltes
Resonanzschaubild
Der Vergleich der beiden Resonanzschaubilder zeigt deutliche Unterschiede auf. Diese
ergeben sich infolge der stark nichtlinearen Funktionsgruppen TSD, ZMS und der
Elastikwelle, die nicht in den theoretischen Ansatz einflossen und der nicht validierten
Eingangskennwerte cT und MTM der Bildwelle. Eine weitere Erklärung dafür wäre ein
„gefittetes“ Modell der Ausgangsbildwelle aus Drehschwingungsmessungen. So würden
sich auch die Unterschiede von gemessenen Eigenkreisfrequenzen zu berechneten
erklären, es sollten mit Verfeinerung des Modells bessere und nicht schlechtere
Ergebnisse erzielt werden.
on theoretischen und praktischen Erkenntnissen aus
rundsatzuntersuchungen sollte besser ein Prüfling ohne TSD und ZMS eingesetzt
werden. Der Vierzylinder-Dieselmotor hat dieses Potenzial, vorausgesetzt die
mechanischen Kennwerte können ermittelt werden.
14000
Für die Gegenüberstellung v
G
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Darstellung und Auswertung der Ergebnisse - 88 -
1.
2.
2,5.
4,5.
5.
7,5.
5,5.
0
1000
2000
3000
4000
0 500 1000 1500 2000 2500 3000 3500 4000 4500
n [U/min]
ω [r
ad/s
]
Bild 66: Resonanzschaubild, gemessene Eigenkreisfrequenzen (rot) und berechnete
lich), bei ca. 1000 rad/s (berechnet) und bei ca. 1650 rad/s
emessen) sind auf das Vorhandensein des TSD zurückzuführen.
emessenen übereinstimmen, werden
auch die berechneten Ersatzerregerkräfte nicht genau den realen Ersatzerregerkräften
gleichen. Die prinzipielle Vorgehensweise ist richtig. Nach Auswertung der Messungen,
Abschnitte 7.1und 7.2, wurden die Drehzahlen n = 2900 U/min und n =3450 U/min als
hauptkritische Resonanzdrehzahlen bestimmt. Es sind die Ersatzerregerkräfte in Bild 67,
Bild 68, Bild 69 und Bild 70 dargestellt.
Eigenkreisfrequenzen (grau)
In Bild 66 sind die gemessenen (rote Graphen) und die berechneten (graue Graphen)
Eigenkreisfrequenzen in ein Resonanzschaubild eingezeichnet. Die gestrichelten Graphen
zeigen eine sehr gute Übereinstimmung. Doch entstammt die berechnete
Eigenkreisfrequenz einem Modell ohne TSD. Die gemessene Eigenkreisfrequenz ist nur
am frEKW zu detektieren, daraus kann geschlossen werden, dass diese eine
Eigenkreisfrequenz der KW ist. Die Eigenkreisfrequenzen bei ca. 2500 rad/s (gemessene
und berechnete Werte ähn
(g
Gemäß der Aufgabenstellung wurden die Ersatzerregerkräfte für die Resonanzdrehzahlen
berechnet. Da die berechneten Eigenkreisfrequenzen und damit auch
Eigenschwingformen nicht genau mit denen der g
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Darstellung und Auswertung der Ergebnisse - 89 -
0,00
0,05
0,10
0,15
0,20
0,25
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
9,0
9,5
10,0
x [-]
Dx [
MPa
]
Bild 67: Spezifische Ersatzerregerkräfte bei 2900 U/min (VL)
0,005
0,010
0,015
0,020
0,025
Dx
. Rax
[MPa
]
Schwingform 3
Schwingform 4
Schwingform 5
Schwingform 6
Schwingform 7
Schwingform 8
0,000
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
x [-]
Bild 68: Ersatzerregerkräfte Dx . Rax für die dritte bis achte Eigenschwingform bei
2900 U/min (VL)
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Darstellung und Auswertung der Ergebnisse - 90 -
0,00
0,05
0,10
0,15
0,20
0,25
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
9,0
9,5
10,0
x [-]
Dx [
MPa
]
Bild 69: Spezifische Ersatzerregerkräfte bei 3450 U/min (VL)
0,000
0,005
0,010
0,015
0,020
0,025
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
x [-]
Dx
. Rax
[MPa
]
Schwingform 3
Schwingform 4
Schwingform 5
Schwingform 6
Schwingform 7
Schwingform 8
Bild 70: Ersatzerregerkräfte Dx . Rax für die dritte bis achte Eigenschwingform bei
3450 U/min (VL)
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Darstellung und Auswertung der Ergebnisse - 91 -
Es wurden einzelne Funktionsgruppen des Torsionsschwingungssystems untersucht.
Dazu wurden die Schwingungsparameter eines TSD real mit Hilfe eines Dreifadenpendels
und im Modell mit Hilfe der FEM untersucht. Es wurden gute Ergebnisse von Berechnung
mit FEM und Messung am Fadenpendel erzielt. Die Funktionsweise und Darstellung des
ZMS als Modell wurde gezeigt. Eine modellierte Kurbelkröpfung wurde mit Hilfe der FEM
auf mechanische Eigenschaften untersucht.
Auf einem Motorenprüfstand der WHZ wurde die Messtechnik PAK MKII der Fa. Müller
BBM zur Drehschwingungsmessung und die Messtechnik zur Zylinderdruckmessung der
Fa. COM an einem Fünfzylinder-Dieselmotor appliziert.
Bild 71: Prüfstand Fünfzylinder-Dieselmotor mit PAK MKII Messsystem
Nachteilig wirkte sich das Anbringen des Sensors der Messstelle SSR am Wellenschutz
der Elastikwelle aus. Im Betrieb kam es zu Relativbewegungen des gesamten Motors zum
Wellenschutz. Die Messstelle SSR muss motorfest appliziert werden. Wegen der
Tiefpassfilter ZMS und Elastikwelle verliert die Messstelle AEla ihre Berechtigung. Die
Auswertung und Visualisierung der Messdaten erfolgte mit dem PAK-Programmsystem.
Dieses lässt eine große Anzahl unterschiedlicher Analysen zu, leider bleibt dabei die
Aus den Drehschwingungsmessungen mit dem PAK-Messsystem konnte die Dämpfung
der KW ermittelt werden. Die ermittelten Dämpfungsgrade sind modale Größen und für
jede Eigenkreisfrequenz unterschiedlich. Die Dämpfungsgrade nehmen zu größeren
Einfachheit der Bedienung auf der Strecke.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand
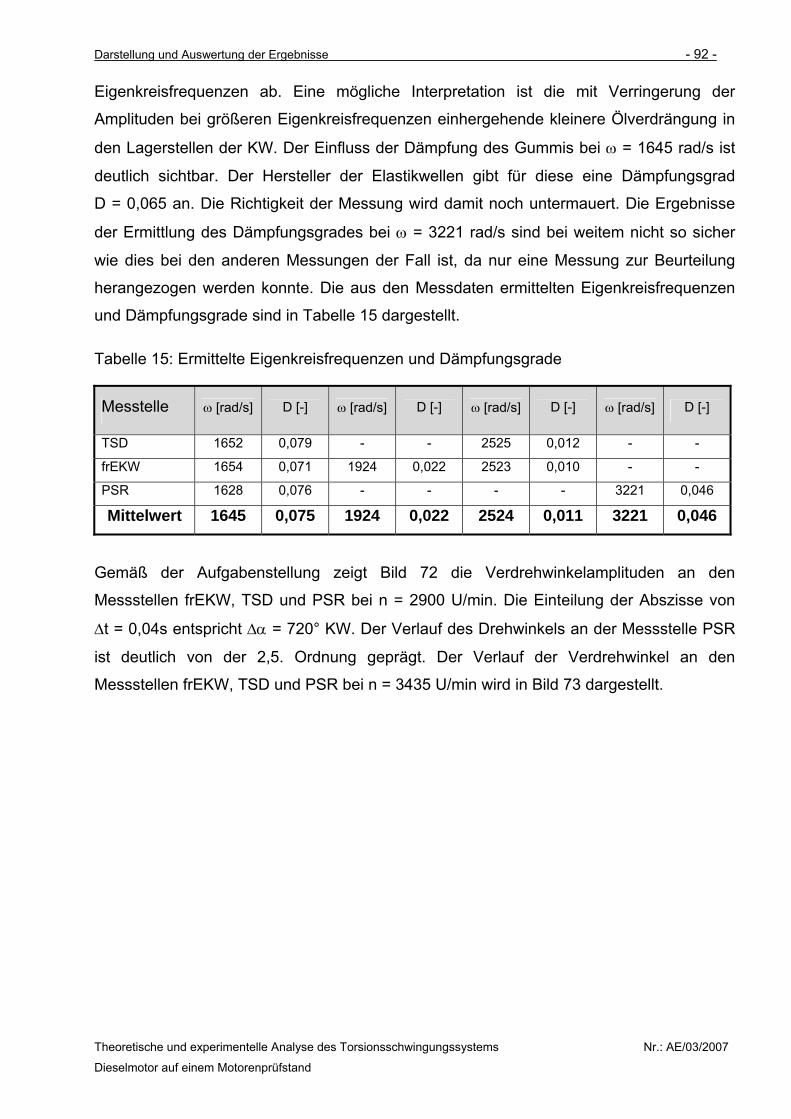
Darstellung und Auswertung der Ergebnisse - 92 -
Eigenkreisfrequenzen ab. Eine mögliche Interpretation ist die mit Verringerung der
Amplituden bei größeren Eigenkreisfrequenzen einhergehende kleinere Ölverdrängung in
den Lagerstellen der KW. Der Einfluss der Dämpfung des Gummis bei ω = 1645 rad/s ist
deutlich sichtbar. Der Hersteller der Elastikwellen gibt für diese eine Dämpfungsgrad
D = 0,065 an. Die Richtigkeit der Messung wird damit noch untermauert. Die Ergebnisse
der Ermittlung des Dämpfungsgrades bei ω = 3221 rad/s sind bei weitem nicht so sicher
ie dies bei den anderen Messungen der Fall ist, da nur eine Messung zur Beurteilung
abelle 15: Ermittelte Eigenkreisfrequenzen und Dämpfungsgrade
w
herangezogen werden konnte. Die aus den Messdaten ermittelten Eigenkreisfrequenzen
und Dämpfungsgrade sind in Tabelle 15 dargestellt.
T
Messtelle ω [rad/s] D [-] ω [rad/s] D [-] ω [rad/s] D [-] ω [rad/s] D [-]
TSD 1652 0,079 - - 2525 0,012 - -
frEKW 1654 0,071 1924 0,022 2523 0,010 - -
PSR 1628 0,076 - - - - 3221 0,046
Mittelwert 1645 0,075 1924 0,022 2524 0,011 3221 0,046
Gemäß der Aufgabenstellung zeigt Bild 72 die Verdrehwinkelamplituden an den
Messstellen frEKW, TSD und PSR bei n = 2900 U/min. Die Einteilung der Abszisse von
∆t = 0,04s entspricht ∆α = 720° KW. Der Verlauf des Drehwinkels an der Messstelle PSR
ist deutlich von der 2,5. Ordnung geprägt. Der Verlauf der Verdrehwinkel an den
Messstellen frEKW, TSD und PSR bei n = 3435 U/min wird in Bild 73 dargestellt.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Darstellung und Auswertung der Ergebnisse - 93 -
-1.0
-0.5
0.0
0.5
Grad
0.02 0.03 0.04 0.05 0.06s
Tilgermasse TSD Drehzahl 2900 1/min freies Ende KW Drehzahl 2900 1/min PSR Drehzahl 2900 1/min
B 2: Ver de rdre el der Messstellen frEKW, TSD, PSR
bei n =2900 U/min (VL)
ild 7 lauf r Ve hwink
-1.0
-0.5
0.0
0.5
1.0
Grad
0.02 0.03 0.04 0.05 s
Tilgermasse TSD Drehzahl 3435 1/min freies Ende KW Drehzahl 3435 1/min PSR Drehzahl 3435 1/min
Bild 73: Verlauf der Verdrehwinkel der Messstellen frEKW, TSD, PSR
bei n =3435 U/min (VL)
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Zusammenfassung - 94 -
9 Zusammenfassung
Das grundlegende Ziel der Arbeit war die Ermittlung der Dämpfung für das
Torsionsschwingungssystem Dieselmotor-Motorenprüfstand. Es wurden die theoretischen
Grundlagen für die Berechnung der Torsionsschwingungen erarbeitet. Die
Eigenkreisfrequenzen und Eigenschwingformen des Torsionsschwingungssystems
wurden mit Hilfe der Software „MathCAD“ und „mathematica“ berechnet. Der
Detaillierungsgrad der Modelle wurde sukzessive bis zum vollständigen Modell
„Dieselmotor-Motorenprüfstand“ vergrößert.
Für die Ermittlung der Dämpfung des Torsionsschwingungssystems wurde ein
Fünfzylinder-Dieselmotor mit der erforderlichen Messtechnik bestückt. Da vor den
Messungen der Steuertrieb des Motors überholt wurde, konnte der
pfers konnte mit Hilfe eines Dreifadenpendels gemessen
werden. Für die Drehschwingungsmessungen wurden für die Messstellen
Torsionsschwingungsdämpfer, freies Ende Kurbelwelle und Sekundärmasse Schwungrad
Zahnscheiben konstruiert und lasergeschnitten. Die Messwerte wurden während sog.
Drehzahlhochläufe über den Betriebsdrehzahlbereich mit dem Messsystem PAK der Fa.
Müller BBM aufgezeichnet und analysiert.
Die modalen Dämpfungsgrade des Torsionsschwingungssystems Dieselmotor-
Motorenprüfstand konnten aus den Ordnungsverläufen der Verdrehwinkel gewonnen
werden. Die Drehschwingungsamplituden am Eingang der Elastikwelle sind
vernachlässigbar, denn als Tiefpassfilter wirken vor allem das Zweimassenschwungrad
und die Elastikwelle selbst.
Auf einem anderen Motorenprüfstand der Westsächsischen Hochschule Zwickau musste
für die Elastikwelle der Festigkeitsnachweis geführt werden. Bei dem Prüfling handelte es
tionssensoren angebracht und an das Messsystem
Es wurden Messungen bei unterschiedlichen Belastungen
und Drehzahlen durchgeführt. Ebenso wurden Messdaten, die mit Hilfe sog.
Torsionsschwingungsdämpfer demontiert werden. Das Massenträgheitsmoment des
Torsionsschwingungsdäm
sich um den Typ 228.30 der Fa. GKN. Es wurden Messstellen an der Elastikwelle mit Hilfe
von Zahnscheiben und Induk
„Mehrkadreh“ angeschlossen.
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand

Zusammenfassung - 95 -
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Drehzahlhoch- bzw. Drehzahlrunterläufen gewonnen wurden, ausgewertet. Es wurden
n während des Startvorganges untersucht.
lt.
Drehschwingungsmessunge
Ein wesentliches Ergebnis der Auswertung lautet: Der Betrieb der Elastikwelle GKN 228.30 in Verbindung mit dem Vierzylinder-Dieselmotor auf dem untersuchten Motorenprüfstand ist unkritisch.
Es wurde eine Versuchsanleitung zur Durchführung eines Praktikums im Rahmen der
Ingenieursausbildung der Westsächsischen Hochschule Zwickau „Drehschwingungs-
messung am Fünfzylinder-Dieselmotor“ erstel
Für die Gegenüberstellung von theoretischen und praktischen Erkenntnissen aus
Grundsatzuntersuchungen sollte besser ein Prüfling ohne Torsionsschwingungsdämpfer
und Zweimassenschwungrad eingesetzt werden. Mit den hier verwendeten Messtechniken
an den zugänglichen Messstellen einerseits und invasiven Messtechniken andererseits
sollten die Eigenschwingformen der Kurbelwelle gemessen werden können.
Die Bedienung des PAK-Messsystems muss vertieft und die Auswertemöglichkeiten
besser ausgeschöpft werden.
Dieselmotor auf einem Motorenprüfstand

Literaturverzeichnis
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
N, W. (Hrsg.): Kraftfahrzeugmotoren. Auslegung und
Konstruktion. 4., völlig neu bearbeitete und erweiterte Auflage. Würzburg:
] DRESIG, H; HOLZWEIßIG, F.: Arbeitsbuch Maschinendynamik/ Schwingungslehre.
] HAFNER, K.E.; MAASS, H.: Theorie der Triebwerksschwingungen der Ver-
inger-Verlag, 1984.
] HAFNER, K.E.; MAASS, H.: Torsionsschwingungen in der Verbrennungs-
kraftmaschine. Die Verbrennungskraftmaschine Neue Folge. Band 4. Wien,
New York: Springer-Verlag, 1985.
[9] VAN BASSHUYSEN, R.; SCHÄFER, F. (Hrsg.): Handbuch Verbrennungsmotoren. 3.,
vollständig überarbeitete und erweiterte Auflage. Wiesbaden: Friedr. Vieweg &
Sohn Verlag, 2005.
[10] Das Zweimassenschwungrad als virtueller Sensor. MTZ 06/2007 S. 486 bis
493.
[11] SCHIRMER, W. (Hrsg.): Lärmbekämpfung. 1. Auflage. Berlin: Verlag Tribüne,
1989.
[12] KOHLDORFER, W.: Finite-Elemente-Methoden mit Catia V5. München, Wien: Carl
Hanser Verlag, 2004.
[13] ZIETHEN, R.: Catia V5 – Konstruktionsmethodik zur Modellierung von
Volumenkörpern. München, Wien: Carl Hanser Verlag, 2004.
[1] Produktinformation Fa. Polytec. http://www.polytec.com/ger/_files/
LM_AN_VIB-C-04_2005_11_D.pdf. Stand 09.04.2007
[2] KÜNTSCHER, V.; HOFFMAN
Vogel-Buchverlag, 2006.
[3] GROHE, H.: Otto- und Dieselmotoren. 8. Auflage. Würzburg: Vogel-Buchverlag,
1987.
[4
1. Auflage. Leipzig: VEB Fachbuchverlag, 1983.
[5] DRESIG, H; HOLZWEIßIG, F.: Lehrbuch der Maschinendynamik. 4.,
neubearbeitete Auflage. Leipzig, Köln: Fachbuchverlag, 1994.
[6] DRESIG, H; HOLZWEIßIG, F.: Maschinendynamik. Berlin, Heidelberg, New York:
Springer-Verlag, 2005.
[7
brennungskraftmaschine. Die Verbrennungskraftmaschine Neue Folge. Band 3.
Wien, New York: Spr
[8
Dieselmotor auf einem Motorenprüfstand

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
[14] BRONSTEIN, I.N., SEMENDJAJEW, K. A.: Taschenbuch der Mathematik. 22.
pzig, Moskau: BSB B. G. Teubner Verlagsgesellschaft, 1979.
5] PAPULA, L.: Mathematische Formelsammlung. 4. verbesserte Auflage.
[16] ormeln. München, Wien:
[17]
hstechniken zur Ermittlung von Dämpfungskenngrößen. 11/2005.
[21]
ustrie, 1994.
[24]
[25] hsische Hochschule Zwickau, private
[26]
rautvetter, 2005.
ür die Untersuchung der Drehschwingungseigenschaften
Auflage. Lei
[1
Wiesbaden: Friedr. Vieweg & Sohn Verlag, 1994.
FISCHER, K.-F. (Hrsg.): Taschenbuch der technischen F
Fachbuchverlag Leipzig im Hanser Verlag, 1996.
VDI-Richtlinie 3830 Blatt 1: Werkstoff- und Bauteildämpfung. Einteilung und
Übersicht. 08/2004.
[18] VDI-Richtlinie 3830 Blatt 5: Werkstoff- und Bauteildämpfung.
Versuc
[19] DIN 1311 Teil 1: Schwingungen und schwingungsfähige Systeme - Teil 1:
Grundbegriffe, Einteilung, 02/2000.
[20] THEIN, M.: Sensoren. Intranet www.fh-zwickau.de
Produktinformation Fa. LuK: LuK Zweimassenschwungrad.
[22] FISCHER, K.-F.: Technische Mechanik. 1. Auflage. Leipzig, Stuttgart: Deutscher
Verlag für Grundstoffind
[23] mathsoft. MathCAD11-Benutzerhandbuch. http://www.mathsoft.com
http://de.wikipedia.org/wiki/Nyquist-Shannon-Abtasttheorem, Stand 31.3.2007.
STAN, C.: Alternative Antriebe. Westsäc
Vorlesungsmitschriften, J. Trautvetter, 2006.
FISCHER, K.-F.: Technische Mechanik. Westsächsische Hochschule Zwickau,
private Vorlesungsmitschriften, J. T
[27] SEYFERT, E.: Untersuchung der Masseeigenschaften eines Dreh-
schwingungsdämpfers von einem 2,5 l-TDI-Motor und Schaffung der
Vorraussetzungen f
der Kurbelwelle. Westsächsische Hochschule Zwickau, Studienarbeit, 2006.
Dieselmotor auf einem Motorenprüfstand

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Anlage 1: Ausgangsdaten 2,5l-Fünfzylinder-Dieselmotor
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
elwelle Massenträgheitsmomente, Torsionsfedersteifigkeiten Kurb
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Anlage 2: Zeichnungen
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Anlage 3: Makros, Visual Basic
Dieselmotor auf einem Motorenprüfstand Anlagen

Sub ft()
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dim pi As Double
Dim a0 As Double
Dim am As Double
Dim ak As Double
Dim bk As Double
Dim ck As Double
Dim arg As Double
m = 360
pi = 3.14159265358979
a0 = 0
am = 0
ak = 0
bk = 0
ck = 0
For k = 1 To m - 1
For i = 0 To 2 * m - 1
a0 = a0 + Cells(i + 6, 3)
am = am + Cells(i + 6, 3) * Cos(Cells(6 + i, 1) * pi)
ak = ak + Cells(i + 6, 3) * (Cos(k * i * pi / m))
bk = bk + Cells(i + 6, 3) * (Sin(k * i * pi / m))
Next i
a0 = a0 / (2 * m)
am = am / (2 * m)
ak = ak / m
bk = bk / m
ck = Sqr(ak ^ 2 + bk ^ 2)
Dieselmotor auf einem Motorenprüfstand Anlagen

Cells(6, 26) = a0
Cells(7, 26) = am
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
k 'Spalte Z
bk 'Spalte AA
ck 'Spalte AB
ak / ck 'Spalte AC
k = 0
0
ges1 = 0
= 0
lse arcsin = arcsin
ges = yges + (Cells(12 + k, 26) * Cos(k * 2 * pi * Cells(6 + v, 1) / 720) + (Cells(12 + k, 27)
* 2 * pi * Cells(6 + v, 1) / 720)))
ges1 = yges1 + (Cells(12 + k, 28) * (Sin(k * pi * 2 * Cells(6 + v, 1) / 720 + arcsin)))
1
+ o) = (Cells(12 + o, 26) * Cos(o * 2 * pi * Cells(6 + l, 1) / 720) + (Cells(12 + o,
2 * pi * Cells(6 + l, 1) / 720)))
= o + 1
Cells(12 + k, 26) = a
Cells(12 + k, 27) =
Cells(12 + k, 28) =
Cells(12 + k, 29) =
a
bk = 0
ck = 0
Next k
yges =
y
k
o = 1
For v = 1 To 2 * m - 1
For k = 1 To m - 1
arg = (Cells(12 + k, 26)) / (Cells(12 + k, 28))
arcsin = (Atn(arg / (Sqr(-arg * arg + 1))))
If Cos(arcsin) < 0 Then arcsin = pi - arcsin E
y
* Sin(k
'y
Do While o < 21
For l = 1 To 2 * m -
Cells(5 + l, 3
27) * Sin(o *
Next l
o
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
oop
ext k
s
synth
ext v
b
L
N
ysynth = a0 + yge
Cells(6 + v, 24) = y
yges = 0
'ysynth1 = a0 + yges1
'Cells(6 + v, 25) = ysynth1
yges1 = 0
N
End Su
Dieselmotor auf einem Motorenprüfstand Anlagen
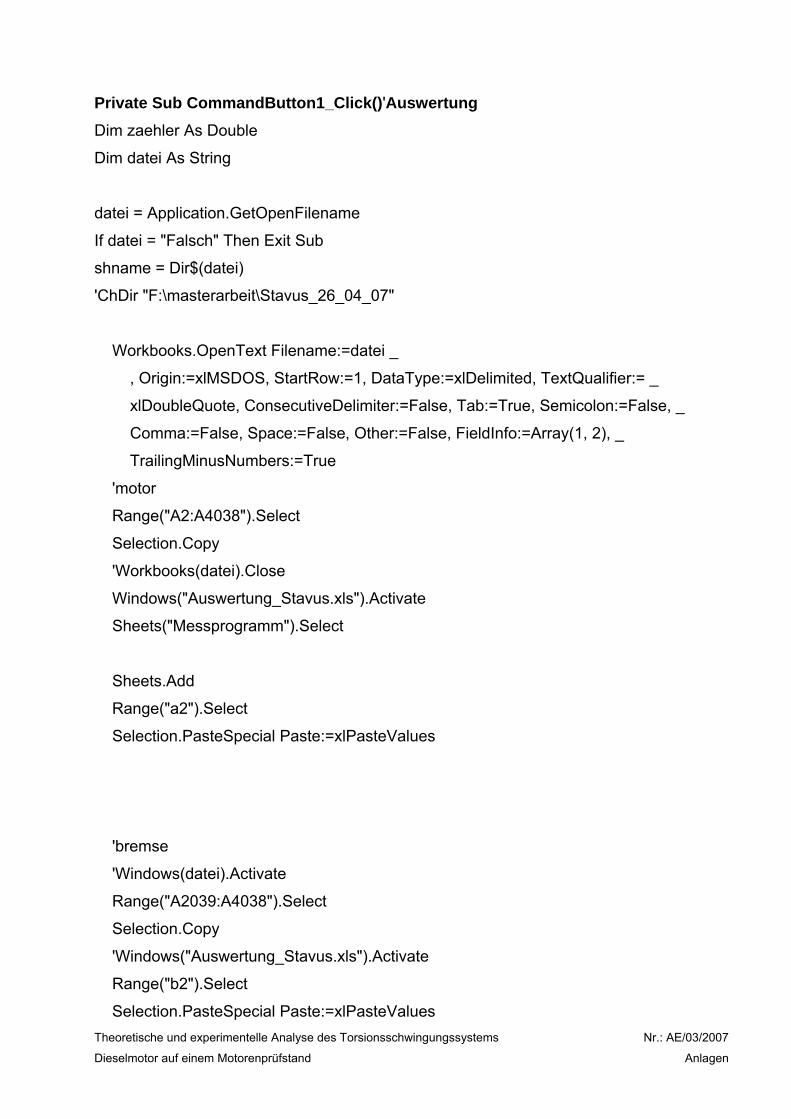
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
e Sub CommandButton1_Click()'Auswertung hler As Double
plication.GetOpenFilename
Exit Sub
asterarbeit\Stavus_26_04_07"
Workbooks.OpenText Filename:=datei _
in:=xlMSDOS, StartRow:=1, DataType:=xlDelimited, TextQualifier:= _
xlDoubleQuote, ConsecutiveDelimiter:=False, Tab:=True, Semicolon:=False, _
Comma:=False, Space:=False, Other:=False, FieldInfo:=Array(1, 2), _
TrailingMinusNumbers:=True
'motor
Range("A2:A4038").Select
Selection.Copy
'Workbooks(datei).Close
Windows("Auswertung_Stavus.xls").Activate
Sheets("Messprogramm").Select
Sheets.Add
Range("a2").Select
Selection.PasteSpecial Paste:=xlPasteValues
'bremse
'Windows(datei).Activate
Range("A2039:A4038").Select
Selection.Copy
'Windows("Auswertung_Stavus.xls").Activate
Range("b2").Select
Selection.PasteSpecial Paste:=xlPasteValues
PrivatDim zae
Dim datei As String
datei = Ap
If datei = "Falsch" Then
shname = Dir$(datei)
'ChDir "F:\m
, Orig
Dieselmotor auf einem Motorenprüfstand Anlagen
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
.Clear
= shname
aehler1 = 1
xt i
1 + 1, 1) <> Empty
p
zaehler1
hen
, 3)
Range("a2001:i6000")
ActiveSheet.Name
i = 1
k = 0
zaehler = 1
z
Do While Cells(zaehler + 1, 1) <> Empty 'Or Cells(zaehler + 1, 1) <> Empty
zaehler = zaehler + 1
'If Cells(zaehler, 2) > Cells(zaehler + 1, 2) Then
'k = k + 1
'End If
Loop
'erste reihe motor
For i = 2 To zaehler
Cells(i, 3) = "=HEXINDEZ(RC[-2])"
Ne
Do While Cells(zaehler
zaehler1 = zaehler1 + 1
Loo
For i = 2 To
If Cells(i + 1, 3) > Cells(i, 3) T
Cells(i, 4) = Cells(i + 1, 3) - Cells(i
Else
Cells(i, 4) = Cells(i + 1, 3) - Cells(i, 3) + 65535
End If
Next i
Dieselmotor auf einem Motorenprüfstand Anlagen

For i = 2 To zaehler1
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
00064) 'alte messung kleine drehzahl
ells(i, 5) = 1 / (Cells(i, 4) * 0.0000004)
ext i
reihe bremse
zaehler
HEXINDEZ(RC[-4])"
ext i
1, 6) > Cells(i, 6) Then
6) - Cells(i, 6)
ells(i, 7) = Cells(i + 1, 6) - Cells(i, 6) + 65535
2 To zaehler1
ells(i, 8) = 1 / (Cells(i, 7) * 0.0000064) 'messung kleine dz
ifferenz
or i = 2 To zaehler1
- Cells(i, 8)
ction.NumberFormat = "0"
tion.HorizontalAlignment = xlCenter
'Cells(i, 5) = 1 / (Cells(i, 4) * 0.00
C
N
'zweite
For i = 2 To
Cells(i, 6) = "=
N
For i = 2 To zaehler1
If Cells(i +
Cells(i, 7) = Cells(i + 1,
Else
C
End If
Next i
For i =
'C
Cells(i, 8) = 1 / (Cells(i, 7) * 0.0000004)
Next i
'd
F
Cells(i, 9) = Cells(i, 5)
Next i
Columns("C:I").Select
Sele
Selec
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
ivate
Sheets("Diff_Drehz_S").Select
a.Select
Collection.Paste rowcol:=xlColumns
eChart.SetSourceData Source:=Sheets(shname).Range("i2:i2000"), _
PlotBy:=xlColumns
'ActiveChart.SeriesCollection.Name = shname
Sheets(shname).Act
Range("i2:i2000").Select
Selection.Copy
ActiveChart.PlotAre
ActiveChart.Series
'Activ
End Sub
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
b aus1mach5()
r = zaehler
me = summe + Cells(zaehler, 8)
lls(zaehler, 12)
Next k
Cells(6 + i, 23) = summe 'Spalte W
Cells(6 + i, 25) = summe1 'Spalte Y
Cells(6 + i, 27) = summe2 'Spalte AA
Cells(6 + i, 30) = summe3 'Spalte AD
summe = 0
summe1 = 0
summe2 = 0
summe3 = 0
Next i
End Sub
Su
zaehler = 0
For i = 0 To 719
For k = 1 To 5
zaehler = (6 + i + (k - 1) * 144)
If zaehler > 725 Then zaehler = zaehler - 720 Else zaehle
sum
summe1 = summe1 + Cells(zaehler, 10)
summe2 = summe2 + Ce
summe3 = summe3 + Cells(zaehler, 15)
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Verlaufes der Gastangentialkraft bei
ehzahlen und unterschiedlichen Lastzuständen, Darstellung der
Anlage 4: Harmonische Analyse des
unterschiedlichen Dr
spezifischen Ersatzerregerkräfte
Dieselmotor auf einem Motorenprüfstand Anlagen

-10000
0
10000
20000
30000
40000
50000
60000
70000
80000
90000
0 60 120 180 240 300 360 420 480 540 600 660 720α [°KW]
F Gt [
N]
VL n = 4000 U/minVL n = 2500 U/minVL n = 1000 U/minNL = 2500 U/minNL = 800 U/min
Gastangentialkraftverlauf über dem Kurbelwinkel, Variation Lastzustand und Drehzahl
0,00
0,05
0,10
0,15
0,20
0,25
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
9,0
9,5
10,0
x [-]
Dx [
MPa
]
spezifische Ersatzerregerkräfte Dx n = 800 U/min, NL
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand Anlagen

0,00
0,05
0,10
0,15
0,20
0,25
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
9,0
9,5
10,0
x [-]
Dx [
MPa
]
spezifische Ersatzerregerkräfte D n = 2500 U/min, NL x
0,00
0,05
0,10
0,15
0,20
0,25
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
9,0
9,5
10,0
x [-]
Dx [
MPa
]
spezifische Ersatzerregerkräfte D n = 1000 U/min, VL x
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand Anlagen

0,00
0,05
0,10
0,15
0,20
0,25
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
9,0
9,5
10,0
x [-]
Dx [
MPa
]
spezifische Ersatzerregerkräfte Dx n = 2500 U/min, VL
0,00
0,05
0,10
0,15
0,20
0,25
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
9,0
9,5
10,0
x [-]
Dx [
MPa
]
spezifische Ersatzerregerkräfte Dx n = 4000 U/min, VL
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand Anlagen

-20000
0
20000
40000
60000
80000
0 60 120 180 240 300 360 420 480 540 600 660 720
α [°KW]
F [N
]
0,5. Ordnung
1. Ordnung
1,5. Ordnung
2. Ordnung
2,5. Ordnung
3. Ordnung
5. Ordnung
7,5. Ordnung
Synthese
Tangentialkraft,Ausgangsdaten
Darstellung der Harmonischen und
-10000
0
10000
20000
30000
40000
50000
60000
70000
80000
0 60 120 180 240 300 360 420 480 540 600 660 720
α [°KW]
F Gt [
N]
Tangentialkraft,Ausgangsdatenk=180 Ordnungen
k=10 Ordnungen
Vergleich des gemessenen Gastangentialkraftverlaufes (rot), der Synthese k = 180
Ordnungen (blau) und der Synthese k = 10 Ordnungen (grün) bei n = 2500 U/min, VL
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand Anlagen
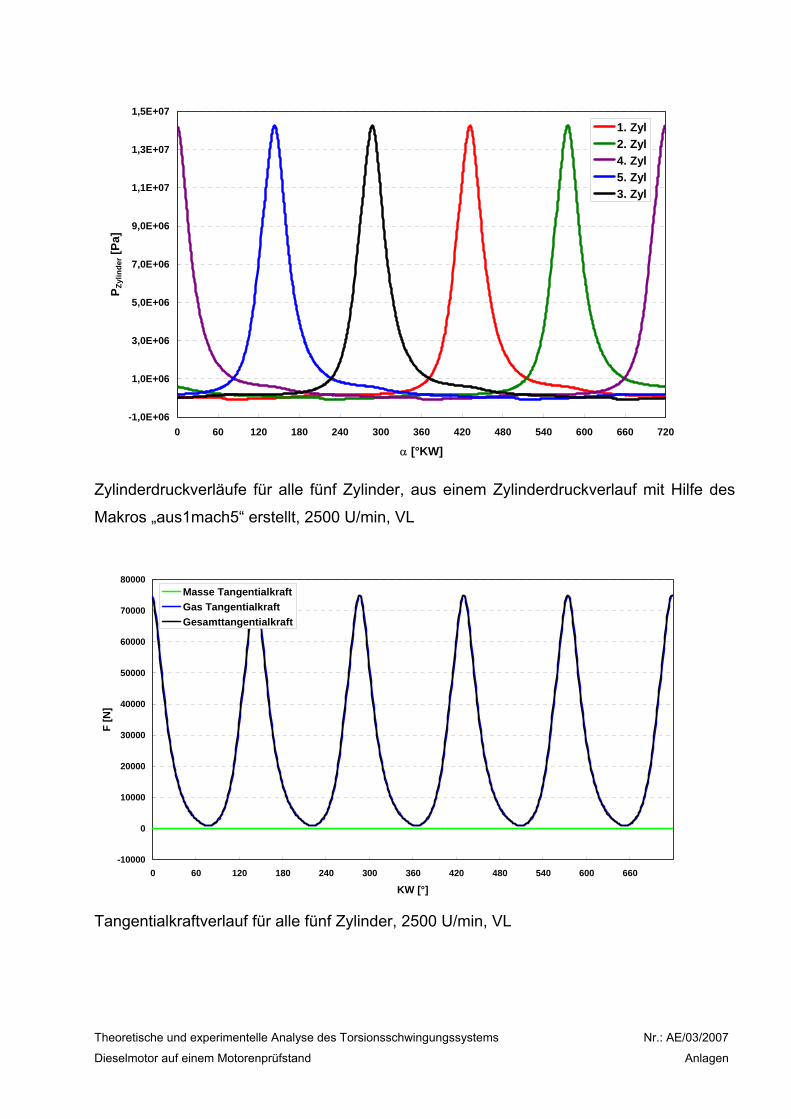
-1,0E+06
1,0E+06
3,0E+06
5,0E+06
7,0E+06
9,0E+06
1,1E+07
1,3E+07
1,5E+07
0 60 120 180 240 300 360 420 480 540 600 660 720
α [°KW]
P Zyl
inde
r [Pa
]1. Zyl2. Zyl4. Zyl5. Zyl3. Zyl
Zylinderdruckverläufe für alle fünf Zylinder, aus einem Zylinderdruckverlauf mit Hilfe des
Makros „aus1mach5“ erstellt, 2500 U/min, VL
-10000
0
10000
20000
30000
40000
50000
60000
70000
80000
0 60 120 180 240 300 360 420 480 540 600 660
KW [°]
F [N
]
Masse TangentialkraftGas TangentialkraftGesamttangentialkraft
Tangentialkraftverlauf für alle fünf Zylinder, 2500 U/min, VL
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Anlage 5: Grenzwert nach Neuber und Eigenkreisfrequenzen nach Gümbel-Holzer-Tolle-
Mothode für die Ausgangsbildwelle, Restwertdiagramm
Dieselmotor auf einem Motorenprüfstand Anlagen

c1 c1
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
J1ω1 J2 J3+ J4+ J5+ J6+ J7+
+:=ω1 4256
rads
=
ω2c2
J1 J2+
c2
J3 J4+ J5+ J6+ J7++:= ω2 5386
rads
=
ω3c3
J1 J2+ J3+
c3
J4 J5+ J6+ J7++:= ω3 4536
rads
=
ω4c4
J1 J2+ J3+ J4+
c4
J5 J6+ J7++:=
ω4 4036rads
=
ω5c5
J1 J2+ J3+ J4+ J5+
c5
J6 J7++:= ω5 3706
rads
=
ω6c6
J1 J2+ J3+ J4+ J5+ J6+
c6
J7+:= ω6 3474
rads
=
ω01
1
ω1( )2⎡⎢⎢⎣
⎤⎥⎥⎦
1
ω2( )2⎡⎢⎢⎣
⎤⎥⎥⎦
+1
ω3( )2⎡⎢⎢⎣
⎤⎥⎥⎦
+1
ω4( )2⎡⎢⎢⎣
⎤⎥⎥⎦
+1
ω5( )2⎡⎢⎢⎣
⎤⎥⎥⎦
+1
ω6( )2⎡⎢⎢⎣
⎤⎥⎥⎦
+
:=ω0 1678
rads
=
fuω0
2 π⋅:= fu 267Hz=
Abschätzung der unteren Eigenkreisfrequenz nach Neuber
Dieselmotor auf einem Motorenprüfstand Anlagen
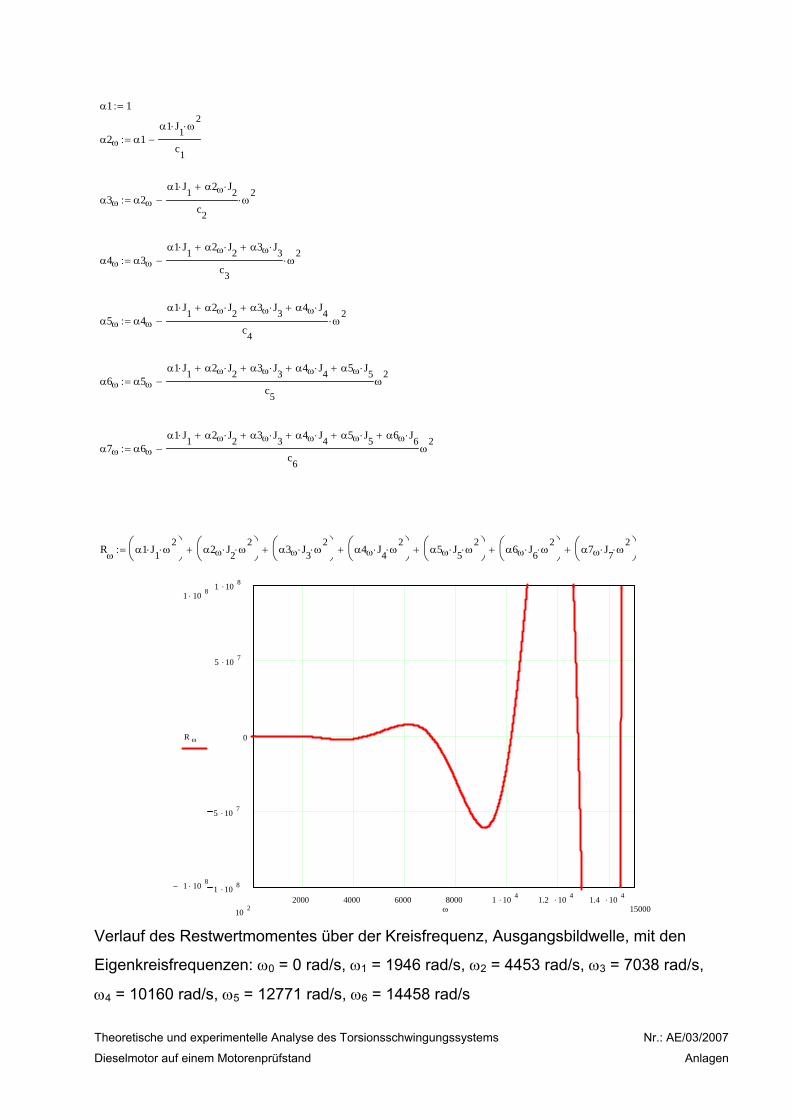
α1 1:=
α2ω α1α1 J1⋅ ω
2⋅
c1−:=
α3ω α2ω
α1 J1⋅ α2ω J2⋅+
c2ω
2⋅−:=
α4ω α3ω
α1 J1⋅ α2ω J2⋅+ α3ω J3⋅+
c3ω
2⋅−:=
α5ω α4ω
α1 J1⋅ α2ω J2⋅+ α3ω J3⋅+ α4ω J4⋅+
c4ω
2⋅−:=
α6ω α5ω
α1 J1⋅ α2ω J2⋅+ α3ω J3⋅+ α4ω J4⋅+ α5ω J5⋅+
c5ω
2−:=
α7ω α6ω
α1 J1⋅ α2ω J2⋅+ α3ω J3⋅+ α4ω J4⋅+ α5ω J5⋅+ α6ω J6⋅+
c6ω
2−:=
Rω α1 J1⋅ ω2
⋅⎛⎝
⎞⎠ α2ω J2⋅ ω
2⋅⎛
⎝⎞⎠+ α3ω J3⋅ ω
2⋅⎛
⎝⎞⎠+ α4ω J4⋅ ω
2⋅⎛
⎝⎞⎠+ α5ω J5⋅ ω
2⋅⎛
⎝⎞⎠+ α6ω J6⋅ ω
2⋅⎛
⎝⎞⎠+ α7ω J7⋅ ω
2⋅⎛
⎝⎞⎠+:=
2000 4000 6000 8000 1 .10 4 1.2 .10 4 1.4 .10 41 .10 8
5 .10 7
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
0
5 .10 7
1 .10 8
1 10 8⋅
1− 10 8⋅
1500010 2 ω
R ω
Verlauf des Restwertmomentes über der Kreisfrequenz, Ausgangsbildwelle, mit den
Eigenkreisfrequenzen: ω0 = 0 rad/s, ω1 = 1946 rad/s, ω2 = 4453 rad/s, ω3 = 7038 rad/s,
ω4 = 10160 rad/s, ω5 = 12771 rad/s, ω6 = 14458 rad/s
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Anlage 6: Ermittlung der Eigenkreisfrequenzen mit Matrizenmethode, für die
Ausgangsbildwelle
Dieselmotor auf einem Motorenprüfstand Anlagen

J1
J
⎛
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
2
J3
J4
J5
J6
J7
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎟⎟⎟
⎠
0.0107
0.0107
0.0107
0.0107
0.0107
0.2136
⎞
⎟ 0.012⎛⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎟
⎠
:=
c1
c2
c3
c4
c5
c6
⎛⎞ ⎜
⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞
⎟⎟⎟⎟⎟⎟⎟
⎠
208000
605000
605000
605000
605000
605000
⎛⎜⎜⎜⎜⎜⎜⎝
⎞
⎟⎟⎟⎟
⎠
:=
ω 1 20000..:=
M ω( )
c1 J1 ω2
⋅−
c1−
0
0
0
0
0
c1−
c1 c2+ J2 ω2
⋅−
c2−
0
0
0
0
0
c2−
c2 c3+ J3 ω2
⋅−
c3−
0
0
0
0
0
c3−
c3 c4+ J4 ω2
⋅−
c4−
0
0
0
0
0
c4−
c4 c5+ J5 ω2
⋅−
c5−
0
0
0
0
0
c5−
c5 c6+ J6 ω2
⋅−
c6−
0
0
0
0
0
c6−
c6 J7 ω2
⋅−
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
⎠
:=
ns 14458=
ns wurzel f ω( ) ω,( ):=ω 14000:=
ns 12771=
ns wurzel f ω( ) ω,( ):=ω 12000:=
ns 10160=
ns wurzel f ω( ) ω,( ):=ω 10000:=
ns 7038=
ns wurzel f ω( ) ω,( ):=ω 7000:=
ns 4453=
ns wurzel f ω( ) ω,( ):=ω 4500:=
ns 1946=
ns wurzel f ω( ) ω,( ):=ω 2000:=
ns 0=
ns wurzel f ω( ) ω,( ):=ω 0:=
Matrix aus „MathCAD“ mit berechneten Eigenkreisfrequenzen für die Ausgangsbildwelle
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Anlage 7: Ermittlung der Eigenkreisfrequenzen mit Matrizenmethode, für die Bildwelle
gemäß Ausgangszustand, modifiziertes Modell, um TSD, ZMS erweitert
Dieselmotor auf einem Motorenprüfstand Anlagen

J1
J2
J3
⎛
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
J4
J5
J6
J7
J8
J9
⎜⎜⎜⎜
⎞
⎟⎟⎟
0.012
0.0037⎛
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎟⎟⎟⎟
⎠
0.0107
0.0107
0.0107
0.0107
0.0107
0.11
0.095
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
c3
c4
c5
c6
c7
c8
⎞⎟
c1
c2
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎟⎟⎟⎟
⎠
605000
605000
605000
605000
605000
270
⎞⎟⎟
11500
208000⎛⎜
⎞
⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎟⎟⎟⎟⎟⎟⎟
⎠
:=
ω 1 15000..:=
M ω( )
c1 J1 ω2
⋅−
c1−
0
0
0
0
0
0
0
c1−
c1 c2+ J2 ω2
⋅−
c2−
0
0
0
0
0
0
0
c2−
c2 c3+ J3 ω2
⋅−
c3−
0
0
0
0
0
0
0
c3−
c3 c4+ J4 ω2
⋅−
c4−
0
0
0
0
0
0
0
c4−
c4 c5+ J5 ω2
⋅−
c5−
0
0
0
0
0
0
0
c5−
c5 c6+ J6 ω2
⋅−
c6−
0
0
0
0
0
0
c5−
c6−
c6 c7+ J7 ω2
⋅−
c7−
0
0
0
0
0
0
0
c7−
c7 c8+ J8 ω2
⋅−
c8−
0
0
0
0
0
0
0
c8−
c8 J8 ω2
⋅−
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
:=
Dieselmotor auf einem Motorenprüfstand Anlagen

ns 13975=
ns wurzel f ω( ) ω,( ):=ω 14000:=
ns 13068=
ns wurzel f ω( ) ω,( ):=ω 13000:=
ns 11183=
ns wurzel f ω( ) ω,( ):=ω 11000:=
ns 8420=
ns wurzel f ω( ) ω,( ):=ω 8000:=
ns 5396=
ns wurzel f ω( ) ω,( ):=ω 5000:=
ns 2431=
ns wurzel f ω( ) ω,( ):=ω 2400:=
ns 939=
ns wurzel f ω( ) ω,( ):=ω 1200:=
ns 50=
ns wurzel f ω( ) ω,( ):=ω 10:=
Matrix aus „MathCAD“ mit berechneten Eigenkreisfrequenzen für Bildwelle gemäß
Ausgangszustand, modifiziertes Modell, um TSD, ZMS erweitert
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Anlage 8: Ermittlung der Eigenkreisfrequenzen mit Matrizenmethode, für die Bildwelle
gemäß Ausgangszustand, modifiziertes Modell, um TSD, ZMS und Elastikwelle erweitert
Dieselmotor auf einem Motorenprüfstand Anlagen

8J1, J2, J3, J4, J5, J6, J7, J8, J9, J10, J11< =80.012, 0.0037, 0.0107, 0.0107, 0.0107, 0.0107, 0.0107, 0.11, 0.11, 0.0955, 0.237<;8c1, c2, c3, c4, c5, c6, c7, c8, c9, c10< =811500, 208000, 605000, 605000, 605000, 605000, 605000, 270, 2800, 2800<;A= 8
c1−J1∗a, −c1, 0, 0, 0, 0, 0, 0, 0, 0, 0 ,8 <8−c1, c1+c2−J2∗a, −c2, 0, 0, 0, 0, 0, 0, 0, 0<,80, −c2, c2+c3−J3∗a, −c4, 0, 0, 0, 0, 0, 0, 0<,80, 0, −c3, c3+c4−J4∗a, −c4, 0, 0, 0, 0, 0, 0<,80, 0, 0, −c4, c4+c5−J5∗a, −c5, 0, 0, 0, 0, 0<,80, 0, 0, 0, −c5, c5+c6−J6∗a, −c6, 0, 0, 0, 0<,80, 0, 0, 0, 0, −c6, c6+c7−J7∗a, −c7, 0, 0, 0<,80, 0, 0, 0, 0, 0, −c7, c7+c8−J8∗a, −c8, 0, 0<,80, 0, 0, 0, 0, 0, 0, −c8, c8+c9−J9∗a, −c9, 0<,80, 0, 0, 0, 0, 0, 0, 0, −c9, c9+c10−J10∗a, −c10<,80, 0, 0, 0, 0, 0, 0, 0, 0, −c10, c10−J11∗a<<;
MatrixForm@ADf= Det@AD;Solve@f 0, aD;c= aê. %;ω= Sqrt@cD;ω
i
k
jjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
11500− 0.012a −11500 0 0 0 0 0 0−11500 219500− 0.0037a −208000 0 0 0 0 0
0 −208000 813000− 0.0107a −605000 0 0 0 00 0 −605000 1210000− 0.0107a −605000 0 0 00 0 0 −605000 1210000− 0.0107a −605000 0 00 0 0 0 −605000 1210000− 0.0107a −605000 00 0 0 0 0 −605000 1210000− 0.0107a −6050000 0 0 0 0 0 −605000 605270− 0.10 0 0 0 0 0 0 −2700 0 0 0 0 0 0 00 0 0 0 0 0 0 0
80., 44.0328, 139.128, 280.307, 955.492, 2478.47, 5895.86, 8319.44, 10445.5, 12830.7, 14468.4<
Matrix aus „Mathematica“ mit berechneten Eigenkreisfrequenzen für Bildwelle gemäß
Ausgangszustand, modifiziertes Modell, um TSD, ZMS und Elastikwelle erweitert
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Anlage 9: Errechnete Dämpfungsgrade aus Drehschwingungsmessungen mit
dem PAK-Messsystem am Fünfzylinder-Dieselmotor
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
nmax
3575
3389
3239
2870
036
9722
7821
6020
090
3447
3204
3012
2844
max
0,04
150,
2765
0,12
000,
1925
0,00
000,
0380
0,07
940,
0493
0,04
810,
0000
0,04
790,
0580
0,03
600,
0120
min
0,02
930,
1955
0,08
490,
1361
0,00
000,
0269
0,05
620,
0348
0,00
000,
0339
0,04
100,
0255
0,00
850,
0000
0,00
00n1
3408
3140
3050
2686
036
6921
13
2020
1894
034
1731
7829
9428
10n2
3876
3675
3461
3072
037
1524
5323
5421
690
3497
3247
3031
2890
fmax
6056
5448
162
3836
331
5753
5047
1f1
5752
5145
061
3534
320
5753
5047
0f2
6561
5851
062
4139
360
5854
5148
0f
238
254
270
263
040
126
627
026
80
402
401
402
403
0w
1497
1597
1696
1653
025
1616
7016
9616
830
2527
2516
2523
2531
0D
0,06
50,
079
0,06
30,
067
0,00
00,
006
0,07
50,
077
0,06
80,
000
0,01
20,
011
0,00
60,
014
0,00
00,
000
D =
0,07
2D
=0,
010
ω =
1642
rad/
sω
=25
23ra
d/s
f =26
1Hz
f =40
2Hz
Mes
sung
:M
a_N
L_80
0-40
00_T
SD
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
7,0
7,5
8,0
8,5
10,0
11,
nmax
3478
3243
2984
3053
3716
2227
1944
3448
max
0,10
100,
0589
0,05
420,
0130
0,01
220,
0179
00,
0130
0,00
000,
0150
00,
0000
00,
0000
min
0,07
140,
0416
0,03
830,
0092
0,00
860,
0126
00,
0092
0,00
000,
0106
00,
0000
00,
0000
0,00
00n1
3230
3063
2810
3010
3685
1973
017
080
3415
00
00
n238
1035
8032
4031
2837
3724
600
2082
035
550
00
0fm
ax58
5450
5162
370
321
570
11
11
f154
5147
5061
330
280
570
00
00
f264
6054
5262
410
350
590
00
00
f26
127
027
430
540
326
00
259
040
20
00
00
w16
3916
9817
1919
1825
2916
320
1629
025
280
00
00
D0,
083
0,08
00,
072
0,01
90,
007
0,10
90
0,09
60,
000
0,02
00
0,00
00
0,00
00,
000
0
D =
0,08
8D
=0,
014
ω =
1663
rad/
sω
=25
28ra
d/s
f =26
5Hz
f =40
2Hz
Ord
nung
Ord
nung
Errechnete Dämpfungsgrade aus Messungen am TSD
Mes
sung
:M
a_VL
_800
-40
00_f
rEK
W_T
SD
TSD
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
7,0
7,5
8,0
8,5
11,0
11,5
15,0 0
0,00
000,
0000 0 0
11
00
00
00
00
0,00
0
515
,0
0,00
000,
0000 0 0 1 0 0 0 0
,000
Dieselmotor auf einem Motorenprüfstand Anlagen
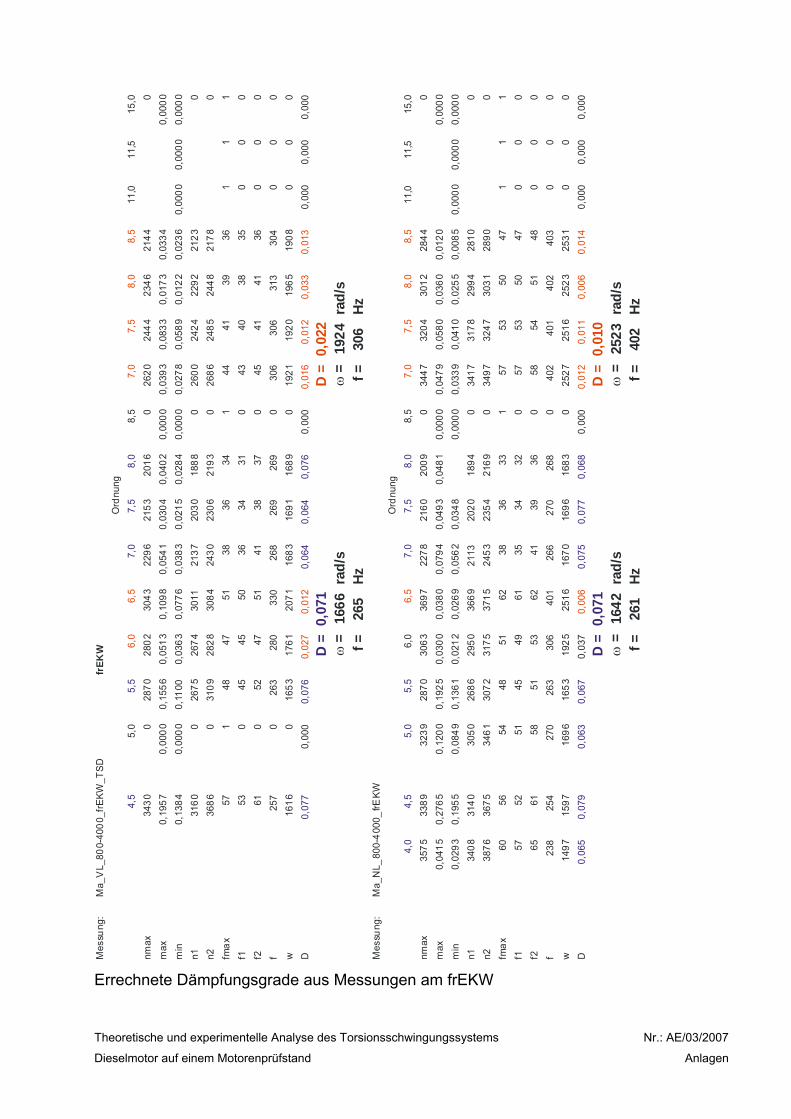
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
7,0
7,5
8,0
8,5
11,0
11,5
15,0
nmax
3430
028
7028
0230
4322
9621
5320
160
2620
2444
2346
2144
0m
ax0,
1957
0,00
000,
1556
0,05
130,
1098
0,05
410,
0304
0,04
020,
0000
0,03
930,
0833
0,01
730,
0334
0,00
00m
in0,
1384
0,00
000,
1100
0,03
630,
0776
0,03
830,
0215
0,02
840,
0000
0,02
780,
0589
0,01
220,
0236
0,00
000,
0000
0,00
00n1
3160
026
7526
7430
1121
3720
3018
880
2600
2424
2292
2123
0n2
3686
031
0928
2830
8424
3023
0621
930
2686
2485
2448
2178
0fm
ax57
148
4751
3836
341
4441
3936
11
1f1
530
4545
5036
3431
043
4038
350
00
f261
052
4751
4138
370
4541
4136
00
0f
257
026
328
033
026
826
926
90
306
306
313
304
00
0w
1616
016
5317
6120
7116
8316
9116
890
1921
1920
1965
1908
00
0D
0,07
70,
000
0,07
60,
027
0,06
40,
064
0,07
60,
000
0,00
00,
000
0,00
0
D =
0,07
1ω
=16
66ra
d/s
ω =
1924
rad/
sf =
265
Hzf =
306
HzM
essu
ng:
Ma_
NL_
800-
4000
_frE
KW
4,0
4,5
5,0
5,5
6,0
7,0
7,5
8,0
8,5
7,5
8,0
8,5
11,0
11,5
15,0
nmax
3575
3389
3239
2870
3063
3697
2278
2160
2009
034
4732
0430
1228
440
max
0,04
150,
2765
0,12
000,
1925
0,03
000,
0380
0,07
940,
0493
0,04
810,
0000
0,04
790,
0580
0,03
600,
0120
0,00
00m
in0,
0293
0,19
550,
0849
0,13
610,
0212
0,02
690,
0562
0,03
480,
0000
0,03
390,
0410
0,02
550,
0085
0,00
000,
0000
0,00
00n1
3408
3140
3050
2686
2950
3669
2113
2020
1894
034
1731
7829
9428
100
n238
7636
7534
6130
7231
7537
1524
5323
5421
690
3497
3247
3031
2890
0fm
ax60
5654
4851
6238
3633
157
5350
471
11
f157
5251
4549
6135
3432
057
5350
470
00
f265
6158
5153
6241
3936
058
5451
480
00
f23
825
427
026
330
640
126
627
026
80
402
401
402
403
00
0w
1497
1597
1696
1653
1925
2516
1670
1696
1683
025
2725
1625
2325
310
00
D0,
065
0,07
90,
063
0,06
70,
037
0,00
60,
075
0,07
70,
068
0,00
00,
006
0,01
40,
000
0,00
00,
000
D =
0,07
1ω
=16
42ra
d/s
ω =
2523
rad/
sf =
261
Hzf =
402
Hz
Ord
nung
Ord
nung
6,5
7,0
7,5
8,0
8,5
0,01
20,
016
0,01
20,
033
0,01
3
D =
0,02
2
6,5
7,0
0,01
20,
011
D =
0,01
0
Mes
sung
:M
a_V
L_80
0-40
00_f
rEKW
_TSD
frEK
W
4,5
5,0
5,5
6,0
Errechnete Dämpfungsgrade aus Messungen am frEKW
Dieselmotor auf einem Motorenprüfstand Anlagen

Mes
sung
:M
a_N
L_80
0-40
00_P
SR
PSR
4,0
4,5
5,0
5,5
6,0
6,5
7,0
7,5
8,0
8,5
7,0
7,5
8,0
8,5
10,0
11,5
15,0
nmax
3778
3447
3005
2968
0
ω =
=32
rad/
f =
00
019
670
00
3815
031
000
max
0,00
450,
0225
0,00
000,
0118
00
00
0,00
410
00
0,00
350
0,00
250,
0000
min
0,00
320,
0159
0,00
000,
0083
00
00
0,00
290
00
0,00
250
0,00
170,
0000
0,00
00n1
3524
3170
2710
2737
00
00
1695
00
036
000
2930
0n2
3916
3700
3250
3130
00
00
2060
00
039
470
3215
0fm
ax63
5750
490
00
033
00
064
052
11
f159
5345
460
00
028
00
060
049
00
f265
6254
520
00
034
00
066
054
00
f25
225
925
027
20
00
026
20
00
509
051
70
0w
1583
1624
1573
1709
00
00
1648
00
031
960
3246
00
D0,
052
0,07
70,
090
0,06
60
00
00,
093
00
00,
045
00,
046
0,00
00,
000
D =
0,07
6D
=0,
046
1628
rad/
sω
21
sf =
259
Hz51
3Hz
Ord
nung
Errechnete Dämpfungsgrade aus Messungen an der Messstelle PSR
Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Dieselmotor auf einem Motorenprüfstand Anlagen

Theoretische und experimentelle Analyse des Torsionsschwingungssystems Nr.: AE/03/2007
Anlage 10: Versuchsanleitung
Dieselmotor auf einem Motorenprüfstand Anlagen

- 1 -
ickau (FH) Zwickau, den 11.08.2007
Fachbereich Maschinenbau und
Kraftfahrzeugtechnik
FG Kraftfahrzeugtechnik
Praktikum Verbrennungsmotoren
Versuch: Drehschwingungsmessung am Fünfzylinder-Dieselmotor
Versuchsziele:
Westsächsische Hochschule Zw
- Erlangen von Grundkenntnissen im Umgang mit dem PAK-
Messsystem
- Ermittlung der Schwingungsamplituden am TSD und am freien
Ende der KW
- Ermitteln von Systemresonanzen der KW aus dem Resonanz-
schaubild
- Ermitteln des modalen Dämpfungsgrades der KW
Versuchsvorbereitung:
1. Welche Bauformen von KW sind Ihnen bekannt, nennen Sie Vor- und Nachteile!
2. In welchem Zusammenhang stehen Kreisfrequenz ω, Frequenz f und Drehzahl n?
3. Welche mechanischen Kenngrößen beeinflussen die Eigenkreisfrequenz eines
schwingfähigen Systems?
4. Was versteht man unter Fourier-Analyse?
5. Welche Kräfte bewirken Drehschwingungen an KW?
6. Welche Maßnahmen zur Verringerung von Drehschwingungen an KW sind
denkbar?
7. Welche Maßnahmen zur Verringerung von Drehschwingungen der KW werden in
z. Zt. ausgeführten Motoren angewandt?
8. Nennen Sie Verfahren zur Ermittlung von Drehschwingungen!

- 2 -
Versuchsaufbau Versuchsmotor AUDI TDI
Hubvolumen: 2,5 l
Zylinderzahl: 5
Hub: 95,5 mm
Bohrung: 81 mm
erdichtungsverhältnis: 20,5
K = 0,826 kg
lPl = 144 mm
verwendeter Kraftsto
Diesel, handelsüblich
Belastungseinrichtun
irbelstrombremse-Pendelmaschine Fa. Zöllner, Typ B 220 AD; Pmax = 160 kW,
Drehm
Ela
Messte
- D erten Stators der Leistungsbremse mit
ein des Drehmomentes an der
Ste
- Temperaturen: Thermoelemente
- D
- Zylin yp 6121
Kurbelwinkelgeber: CAM; Typ 611A1; Fa.COM
- Datenerfassung/Auswertung: PAK MKII Fa. Müller BBM und Laptop
V
H/B = 0,85
m
mPlrot = 0,195 kg
ff:
g:
W
nmax = 6000 U/min
omentübertragung:
stikwelle GKN 228.40
chnik:
rehmoment: Abstützung des pendelnd gelag
em Hebelarm auf eine Kraftmesseinheit, Darstellung
lleinrichtung der Belastungseinheit
rehzahl: inkrementaler Drehwinkelgeber, Zahnscheibe
derdruck:: Quarz-Drucksensor Kistler T
Ladungsverstärker: PCA; Typ630; Fa. COM
- 3 -
rungVersuchsdurchfüh
des Zylinderdruckes mit PAK-Messsystem
g der Gastangentialkraft aus den Druckverläufen bei NL 800 U/min,
U/min, VL 2500 U/min und VL 4000 U/min (Messdaten werden aus PAK in
xportiert)
ingwinkels über der Drehzahl für TSD und frEKW
llen der Resonanzschaubilder TSD und frEKW (PAK-Messsystem)
von emf-Dateien
1. Warmlaufvorgang bei mittlerer Last und n = 2000 U/min
800 U/min und Last auf Md = 5 Nm einstellen (NL)
K Rechner starten
4. Drehzahlhochlauf in 120s von 800 U/min auf 4000 U/min (Verstellung der Drehzahl
elastungseinrichtung)
oment (Ablesen an der Stelleinrichtung der Belastungseinheit)
Drehzahl PAK
nungsanalyse PAK
g Drehzahl auf ca. 800 U/min und Last auf Mdmax einstellen (VL)
htung)
der Belastungseinheit)
10. Einspritzung abschalten und Drehzahl am Bedienpult auf Null stellen,
Leistungsbremsanlage außer Betrieb setzen
a) Aufgaben:
1. Aufzeichnen
2. Ermittlun
NL 2500
MS-Excel e
3. Aufzeichnen des Schw
4. Erste
5. Erstellen
b) Ablauf:
2. Drehzahl auf ca.
3. Messung am PA
am Stellpult der B
5. Aufnahme der Messgrößen:
Drehm
Druckverlauf PAK
FFT und Ord
6. Messun
7. Messung am PAK Rechner starten
8. Drehzahlhochlauf in 120s von 800 U/min auf 4000 U/min (Verstellung der Drehzahl
am Stellpult der Belastungseinric
9. Aufnahme der Messgrößen:
Drehmoment (Ablesen an der Stelleinrichtung
Drehzahl PAK
Druckverlauf PAK
FFT und Ordnungsanalyse PAK

- 4 -
Auswertung
- D i NL 800 U/min, NL 2500
U/m
- Bere
- Berechnung des Drehmomentes aus der errechneten Tangentialkraft
- G chnen der
erm
- D zur Ermittlung des modalen Dämpfungsgrades mit Hilfe
es Verfahrens der Halbwertsbreite (VL und NL)
n der Ergebnisse
Lit
arstellung des Zylinderdruckes über dem Kurbelwinkel be
in, VL 2500 U/min und VL 4000 U/min
chnen der Tangentialkräfte Masse/Gas und deren grafische Darstellung
rafische Darstellung der unterschiedlichen Resonanzschaubilder, Einzei
ittelten Resonanzfrequenzen
arstellung der Vorgehensweise
d
- Diskussio
eraturhinweise
- DRES ik. Berlin, Heidelberg, New York: Springer-
Ve
HAFNER, der
erbrennungskraftmaschine Neue Folge. Band 3. Wien,
KÜNTSCHE : Kraftfahrzeugmotoren. Auslegung und
onstruktion. 4., völlig neu bearbeitete und erweiterte Auflage. Würzburg: Vogel-
Bu
- G uflage. Würzburg: Vogel-Buchverlag, 1987.
KurzzeKW
L
k g]
Plrot [kg] rotatorischer Anteil Pleuelmasse
n
IG, H; HOLZWEIßIG, F.: Maschinendynam
rlag, 2005.
- K.E.; MAASS, H.: Theorie der Triebwerksschwingungen
Verbrennungskraftmaschine. Die V
New York: Springer-Verlag, 1984.
- R, V.; HOFFMANN, W. (Hrsg.)
K
chverlag, 2006.
ROHE, H.: Otto- und Dieselmotoren. 8. A
ichenverzeichnis Kurbelwelle
N Nulllast
VL Volllast
l [m] Länge Pleuel Pl
Md [Nm] Drehmoment
m [k Kolbenmasse, komplett
m
[U/min] Drehzahl

hläge zu den Aufgaben
chmiedete, aus dem Vollen gearbeitete KW
und Drehzahl n?
influssen die Eigenkreisfrequenz eines
s?
it, Massenträgheit, Masse
einer Funktion vom Zeitbereich in den Frequenzbereich
ialkraft
reich ändern, Schwingungsdämpfer (Gummi, Viskose), Tilger,
en zur Verringerung von Drehschwingungen der KW werden in
. a otoren angewandt?
w mpfer (Gummi), Viskoseschwingungsdämpfer (NKW),
n sdämpfer (an der Gegenmasse der Kurbelkröpfung angebracht)
zur Ermittlung von Drehschwingungen!
der Schleifringübertragung der Messwerte in das
rometer, Zahnscheiben, inkrementale Winkelgeber
Lösungsvorsc
1. Welche Bauformen von KW sind Ihnen bekannt, nennen Sie Vor- und Nachteile!
gebaute (Hirthverzahnung), gegossene, ges
2. In welchem Zusammenhang stehen Kreisfrequenz ω, Frequenz f
fnn2
=⋅π⋅=ϖ
3. Welche mechanischen Kenngrößen bee
schwingfähigen System
Steifigke
4. Was versteht man unter Fourier-Analyse?
Transformieren
5. Welche Kräfte verursachen Drehschwingungen an KW?
Massentangentialkraft, Gastangent
6. Welche Maßnahmen zur Verringerung von Drehschwingungen sind denkbar?
Betriebsdrehzahlbe
Steifigkeit KW ändern, MTM KW ändern, Lagerauslegung ändern, Lagerart ändern
7. Welche Maßnahm
z. Zt usgeführten M
Torsionssch ingungsdä
Kurbelwelle schwingung
8. Nennen Sie Verfahren
invasive: Dehnmessstreifen (Funk- o
raumfeste Koordinatensystem)
nicht invasive: Rotationsvib
J0c T=ω





























