Embed Size (px)
DESCRIPTION
Matematika, skripta, analize
Citation preview

Sveuciliste u Rijeci
Odjel za matematiku
Nermina Mujakovic
MATEMATICKA ANALIZA 2
13. lipnja 2013.

SADRZAJ
1 Neodredeni integral 21.1 Definicija neodredenog integrala . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Osnovna svojstva neodredenog integrala . . . . . . . . . . . . . . . . . . . . 31.3 Tablica neodredenih integrala . . . . . . . . . . . . . . . . . . . . . . . . . . 41.4 Metoda supstitucije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.5 Metoda parcijalne integracije . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.6 Integriranje racionalnih funkcija . . . . . . . . . . . . . . . . . . . . . . . . . 71.7 Integriranje transcedentnih funkcija . . . . . . . . . . . . . . . . . . . . . . . 101.8 Integracija algebarskih iracionalnih funkcija . . . . . . . . . . . . . . . . . . 12
2 Odredeni integral 152.1 Problem povrsine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.2 Subdivizija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.3 Integralne sume i njihova svojstva . . . . . . . . . . . . . . . . . . . . . . . . 152.4 Definicija odredenog integrala . . . . . . . . . . . . . . . . . . . . . . . . . . 182.5 Osnovna svojstva odredenog integrala . . . . . . . . . . . . . . . . . . . . . . 192.6 Newton-Leibnizova formula . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.7 Nepravi (nesvojstveni) integral . . . . . . . . . . . . . . . . . . . . . . . . . . 252.8 Primjena odredenog integrala . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3 Numericki redovi 373.1 Konvergencija numerickog reda i osnovna svojstva . . . . . . . . . . . . . . . 373.2 Kriterij za konvergenciju redova . . . . . . . . . . . . . . . . . . . . . . . . . 39
4 Nizovi i redovi funkcija 454.1 Konvergencija niza funkcija i osnovna svojstva . . . . . . . . . . . . . . . . . 454.2 Konvergencija reda funkcija i osnovna svojstva reda . . . . . . . . . . . . . . 464.3 Taylor-ova formula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484.4 Taylor-ovi redovi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.5 Red potencija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.6 Deriviranje i integriranje niza i reda funkcija.
Svojstva reda potencija . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
5 Furierovi redovi 585.1 Periodicne funkcije. Trigonometrijski redovi . . . . . . . . . . . . . . . . . . 585.2 Fourierov red funkcije . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
6 Funkcije dvije i tri varijable 676.1 Osnovna svojstva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
1

7 Dvostruki i trostruki integral 717.1 Integralne sume funkcije dvije varijable . . . . . . . . . . . . . . . . . . . . . 717.2 Definicija dvostrukog integrala i osnovna svojstva . . . . . . . . . . . . . . . 727.3 Izracunavanje dvostrukog integrala . . . . . . . . . . . . . . . . . . . . . . . 747.4 Volumen tijela . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 787.5 Integralne sume funkcije tri varijable. Definicija trostrukog integrala . . . . . 797.6 Izracunavanje trostrukog integrala . . . . . . . . . . . . . . . . . . . . . . . . 81
2

1 NEODREDENI INTEGRAL
Ako funkcija f ima derivaciju u svakoj tocki nekog intervala I = 〈a, b〉 onda je definiranajedna nova funkcija x → f ′(x) za svako x ∈ I. Npr. sinus ima derivaciju za svako x ∈ R ivrijedi (sinx)′ = cos x, tj. definirana je nova funkcija x → cosx, x ∈ R. Sada se postavljaproblem.Neka je zadana funkcija f : 〈a, b〉 → R. Postoji li funkcija F : 〈a, b〉 → R za koju jeF ′(x) = f(x) za svaki x ∈ 〈a, b〉.Upravo odredivanje funkcije F za zadani f je sljedeci zadatak.
1.1 Definicija neodredenog integrala
Definicija 1. Neka je f zadana funkcija na intervalu I = 〈a, b〉.Svaku funkciju F nazivamo primitivnom funkcijom funkcije f na I, ako je za svaki x ∈ I,F ′(x) = f(x).
Primjer 1. Ako je f(x) = ex onda je naprimjer F (x) = ex + 7.Slicno, za f(x) = x2 imamo F (x) = x3
3− 1. Funkcija F (x) = sin x je primitivna funkcija
funkcije f(x) = cos x, itd.Ocigledno je, ako je F ′1(x) = F ′2(x) = f(x) na I onda vrijedi F1(x) − F2(x) = C na I, tj.ako dvije funkcije imaju jednake derivacije na I, onda se one razlikuju za konstantu.
Definicija 2. Skup svih primitivnih funkcija dane funkcije f na intervalu I = 〈a, b〉 nazi-vamo neodredenim integralom funkcije f na I i oznacavamo sa
∫f(x)dx i citamo ”integral
ef od x de iks”.
Ako zelimo da istaknemo o kojem se intervalu radi onda pisemo∫〈a,b〉 f(x)dx. Cesto
pisemo i∫f(x)dx = F (x) + C, gdje je F jedna primitivna funkcija, tj. F ′ = f , a C je
proizvoljna konstanta.
Primjer 2. Vrijedi ∫dx
1 + x2= arctg x+ C,
jer je (arctg x)′ = 11+x2
tj. arctg x je jedna primitivna funkcija funkcije x→ 11+x2
na intervalu〈−∞,∞〉
Primjer 3. Zakljucujemo da je∫|x|dx = x2
2+ C na intervalu 〈0,∞〉 jer je f(x) = |x| = x
i (x2
2)′ = x, a na intervalu 〈−∞, 0〉 imamo∫
|x|dx =−x2
2+ C.
Dakle primitivna funkcija funkcije x→ |x| je
F (x) =
{x2
2, x ≥ 0
−x22, x < 0.
3

1.2 Osnovna svojstva neodredenog integrala
Iz definicije neodredenog integrala i svojstava derivacije lako se dokaze sljedeci teorem.
Teorem 1. Ako su F i G redom primitivne funkcije funkcije f i g na I = 〈a, b〉 i Cproizvoljna konstanta, onda za svako x ∈ I i sve α, β ∈ R (α, β 6= 0) vrijedi
1. (∫f(x)dx
)′= f(x), (1)
2.
d
(∫f(x)dx
)= f(x)dx, (2)
3. ∫dF (x) = F (x) + C, (3)
4. ∫(αf(x) + βg(x))dx = α
∫f(x)dx+ β
∫g(x)dx. (4)
Dokaz. Za sve x ∈ I je
1.
(∫f(x)dx
)′= (F (x) + C)′ = f(x),
2. d
(∫f(x)dx
)=
(∫f(x)dx
)′dx = f(x)dx,
3.
∫dF (x) =
∫F ′(x)dx =
∫f(x)dx = F (x) + C,
4. αF + βG je primitivna funkcija funkcije αf + βg pa je∫(αf(x) + βg(x))dx = αF (x) + βG(x) + C = αF (x) +
C
2+ βG(x) +
C
2
= α(F (x) + C1) + β(G(x) + C2) = α
∫f(x)dx+ β
∫g(x)dx.
Svojstvo (4) pokazuje da je neodredeni integral linearan tj. ima osobinu linearne funkcije.
Primjer 1. Vrijedi:
a)d
dx
(∫cosxdx
)=
d
dx(sinx+ C) = cos x,
4

b)
∫d
dx(cosx)dx = cosx+ C,
c)
∫5xdx = 5
∫xdx = 5
(x2
2+ C
)= 5
x2
2+ C,
d)
∫(x+ ex − 1
x)dx =
∫xdx+
∫exdx−
∫1
xdx =
x2
2+ ex − ln |x|+ C.
1.3 Tablica neodredenih integrala
1.
∫0dx = C,
2.
∫dx = x+ C,
3.
∫xndx =
xn+1
n+ 1+ C,
4.
∫dx
x= ln |x|+ C, (x 6= 0),
5.
∫exdx = ex + C,
6.
∫axdx =
ax
ln a+ C, (a > 0, a 6= 1)
7.
∫sinxdx = − cosx+ C
8.
∫cosxdx = sinx+ C
9.
∫dx
sin2 x= − cotx+ C, (x 6= kπ, k ∈ Z),
10.
∫dx
cos2 x= tgx+ C, (x 6= (2k + 1)
π
2, k ∈ Z),
11.
∫dx
a2 + x2=
1
aarctg
x
a+ C
12.
∫dx√a2 − x2
= arcsinx
a+ C, (|x| < |a|),
13.
∫shxdx = chx+ C,
5

14.
∫chxdx = shx+ C
15.
∫dx
ch2x= thx+ C
16.
∫dx
sh2x= −cthx+ C
17.
∫dx
x2 − a2=
1
2aln |x− a
x+ a|+ C, (|x| 6= |a|)
18.
∫dx√x2 ± a2
= ln |x+√x2 ± a2|+ C
Odredivanje primitivne funkcije F za zadanu funkciju f nije lak posao. Postoje jed-nostavne funkcije za koje odgovarajuca primitivna funkcija nije ni jedna od sada nave-denih elementarnih funkcija u gornjoj tabeli, pa su neki integrali za nas ovdje nerjesivi.
Takvi integrali su npr:
∫e−x
2
dx,
∫sinx2dx,
∫cosx2dx,
∫dx
lnx,
∫sinx
xdx,
∫cosx
xdx,∫
dx√ax3 + bx2 + cx+ d
, itd. Za takve integrale kazemo da nisu elementarni.
1.4 Metoda supstitucije
Primjer 1. Odredi∫
(x+ 2)2dx.Ocito je ∫
(x2 + 4x+ 4)dx =x3
3+ 2x2 + 4x+ C.
Pokusajmo sada taj integral dovesti u vezu sa∫x2dx = x3
3+ C. Uvedimo novu varijablu
t = x + 2, tj. x = t − 2. Tada je dx = dt. Sada imamo∫
(x+ 2)2dx =∫t2dt = t3
3+ C =
(x+2)3
3+ C = x3
3+ 2x2 + 4x+ C.
Uocimo sljedeci korak u izracunavanju integrala∫f(x)dx:
1. varijablu x smo zamijenili funkcijom varijable t i imamo x = g(t) = t − 2, dx =g′(t)dt = 1 · dt = dt.
2. racunamo ∫f [g(t)]g′(t)dt =
∫t2dt =
t3
3+ C = ϕ(t) + C,
3.∫f(x)dx = ϕ(x+ 2) + C.
6

Primjer 2. Izracunati∫
ex
(1+ex)2dx. Uvodimo supstituciju t = 1+ex, dt = exdx i dobivamo∫
ex
(1 + ex)2dx =
∫dt
t2= −1
t+ C = − 1
1 + ex+ C.
Neka je∫f(x)dx = F (x) + C, tj F ′(x) = f(x). Metodom supstitucije x = g(t), dx =
g′(t)dt izracunavanje integrala∫f(x)dx svodi se na izracunavanje integrala
∫f(g(t)) · g′(t)dt.
Neka je ∫f(g(t)) · g′(t)dt = H(t) + C.
zelimo odrediti vezu funkcija F i H. Ocito je H ′(t) = f(g(t)) · g′(t). Sa druge stranederivacija kompozicije F (g(t)) daje
F ′(g(t)) · g′(t) = f(g(t)) · g′(t),
dakle, ddtH(t) = d
dtF (g(t)), tj. funkcije H i F se razlikuju za konstntu. Prema tome, ako
znamo odrediti funkciju H, onda znamo odrediti i funkciju F . Iz F (g(t)) = H(t) + C ix = g(t) izlazi F (x) = H(g−1(x)) + C.
1.5 Metoda parcijalne integracije
Iz derivacije produkta funkcija x → u(x), x → v(x) neposredno slijedi metoda parcijalneintegracije. Naime, iz
[u(x) · v(x)]′ = u′(x) · v(x) + u(x) · v′(x)
slijediu(x) · v′(x) = [u(x) · v(x)]′ − u′(x) · v(x). (1)
Integriranjem jednakosti (1) dobivamo∫u(x) · v′(x)dx =
∫[u(x) · v(x)]′dx−
∫u′(x) · v(x)dx =
= u(x) · v(x)−∫v(x) · u′(x)dx (2)
i znajuci da je dv(x) = v′(x)dx i du(x) = u′(x)dx, (2) mozemo krace pisati∫u · dv = u · v −
∫vdu. (3)
(3) je formula za parcijalnu integraciju.
Primjer 1.
1.
∫ √3 + ln x
xdx =
∣∣∣∣ 3 + ln x = t1xdx = dt
∣∣∣∣ =
∫t12dt =
2t32
3+ C =
2
3
√(3 + ln x)3 + C,
7

2.
∫xdx
1 + x4=
∣∣∣∣ x2 = txdx = 1
2dt
∣∣∣∣ =1
2
∫dt
1 + t2=
1
2arctg t+ C =
1
2arctg x2 + C.
Primjer 2.
1.
∫x lnxdx =
∣∣∣∣ lnx = u, du = 1xdx
xdx = dv, v = x2
2
∣∣∣∣ =x2
2lnx− 1
2
∫x2 · 1
xdx =
=x2
2lnx− 1
2· x
2
2+ C
2.
∫x2exdx =
∣∣∣∣ x2 = u, du = 2xdxexdx = dv, v = ex
∣∣∣∣ = x2ex − 2
∫xexdx =
=
∣∣∣∣ x = u, du = dxexdx = dv, v = ex
∣∣∣∣ = x2ex − 2(xex −∫exdx) = x2ex − 2xex + 2ex + C.
1.6 Integriranje racionalnih funkcija
Neka su x → P (x), x → Q(x) polinomi. Razmatramo funkcije oblika R(x) = P (x)Q(x)
. Ako je
stupanj polinoma P manji od stupnja polinoma Q onda kazemo da je P (x)Q(x)
pravi razlomak.
Ako je stupanj od P veci ili jednak stupnju polinoma Q onda kazemo da je P (x)Q(x)
nepravirazlomak.
Teorem 1. Neka su P i Q polinomi s realnim koeficijentima i P (x)Q(x)
pravi razlomak. Ako je
Q(x) = (x− a)α · · · (x− d)δ · · · (x2 + px+ q)n · · · (x2 + rx+ s)r
onda postoje konstante A1, A2, · · · , Aα, · · · ,D1, · · · ,Dδ, M1, N1, · · · , Mn, Nn, · · · , R1,S1, · · · , Rn, Sn, takve da je
P (x)
Q(x)=
A1
(x− a)α+
A2
(x− a)α−1+ · · ·+ Aα
x− a+ · · ·+ D1
(x− d)δ+
D2
(x− d)δ−1+ · · ·+ Dδ
x− d+
+M1x+N1
(x2 + px+ q)n+
M2x+N2
(x2 + px+ q)n−1+ · · ·+ Mnx+Nn
x2 + px+ q+
+ · · ·+ R1x+ S1
(x2 + rx+ s)r+
R2x+ S2
(x2 + rx+ s)r−1+ · · ·+ Rrx+ Sr
x2 + rx+ s
tj.
P (x)
Q(x)=
α∑k=1
Ak(x− a)α−k+1
+ · · ·+δ∑
k=1
Dk
(x− d)δ−k+1+
+n∑k=1
Mkx+Nk
(x2 + px+ q)n−k+1+ · · ·+
r∑k=1
Rkx+ Sk(x2 + rx+ s)r−k+1
(1)
8

Ovaj teorem ne dokazujemo.Prema tome ako je pravi razlomak P (x)
Q(x)sa Q(x) = (x− a)n onda je
P (x)
Q(x)=
A1
(x− a)α+
A2
(x− a)α−1+ · · ·+ Aα
x− a, (2)
ili ako je Q(x) = (x2 + px+ q)n onda je
P (x)
Q(x)=
M1x+N1
(x2 + px+ q)n+
M2x+N2
(x2 + px+ q)n−1+ · · ·+ Mnx+Nn
x2 + px+ q. (3)
Primjer 1. Razloziti x(x2−1)(x−2)
. Imamo
x
(x2 − 1)(x− 2)=
x
(x− 1)(x+ 1)(x− 2)=
A
x− 1+
B
x+ 1+
C
x− 2.
Zakljucujemo da mora vrijediti jednakost
x = A(x+ 1)(x− 2) +B(x− 1)(x− 2) + C(x− 1)(x+ 1)
tj.x = x2(A+B + C) + x(−A− 3B) + (−2A+ 2B − C)
i dobivamo sustav jednadzbi:
A+B + C = 0,
−A− 3B = 1,
−2A+ 2B − C = 0.
Rjesenje sustava je A = −12, B = −1
6, C = 2
3. Time dobivamo jednakost
x
(x2 − 1)(x− 2)= − 1
2(x− 1)− 1
6(x+ 1)+
2
3(x− 2).
Racionalni razlomci A(x−a)n
i Mx+N(x2+px+q)n
, (n ∈ N), gdje su a, p, q, A, M , N realni brojevi
i p2
4− q < 0, nazivaju se elementarnim razlomcima.
Dakle, pravi racionalni razlomak mozemo razloziti na zbroj elementarnih razlomaka.Ako je V (x)
W (x)nepravi racionalni razlomak, onda dijeljenjem V (x) sa polinomom W (x) dobi-
vamoV (x)
W (x)= S(x) +
P (x)
Q(x), (4)
9

gdje je S(x) polinom i P (x)Q(x)
pravi racionalni razlomak. Slijedi da se problem integracijeracionalnih razlomaka svodi na problem integracije elementarnih razlomaka, jer se integralpolinoma S(x) dobije na trivijalan nacin. Za prvi elementarni razlomak integral je∫
A
(x− a)ndx =
∣∣∣∣ x− a = tdx = dt
∣∣∣∣ =
= A
∫dt
tn= A
t−n+1
1− n+ C =
A
(1− n)(x− a)n−1+ C, (5)
ako je n 6= 1 i x 6= a. Ako je n = 1 imamo∫A
x− adx = A
∫dx
x− a= A ln |x− a|+ C. (6)
Razmatramo integraciju drugog elementarnog razlomka. Kako je x2 + px + q = (x +p2)2 + (q − p2
4), stavljajuci q − p2
4= a2 imamo∫
Mx+N
(x2 + px+ q)ndx =
∫Mx+N
[(x+ p2)2 + (q − p2
4)]ndx =
∣∣∣∣ x+ p2
= tdx = dt
∣∣∣∣ =
=
∫Mt− Mp
2+N
(t2 + a2)ndt =
M
2
∫2t
(t2 + a2)ndt+
2N −Mp
2
∫1
(t2 + a2)ndt. (7)
Prvi integral na desnoj strani u (7) se lako rjesava supstitucijom t2 + a2 = u. Drugiintegral u (7) je za n = 1 tablicni, a za n > 1 rjesava se po rekurzivnom obrascu
Fn+1(t) =1
2na2· t
(t2 + a2)n+
2n− 1
2na2Fn(t). (8)
Dokazimo formulu (8). Vrijedi
Fn+1(t) =
∫1
(t2 + a2)n+1dt =
1
a2
∫a2 + t2 − t2
(t2 + a2)n+1dt =
=1
a2
∫1
(t2 + a2)ndt− 1
a2
∫t · t
(t2 + a2)n+1dt =
=1
a2Fn(t)− 1
a2
∫t · tdt
(t2 + a2)n+1=
∣∣∣∣ t = u, du = dttdt
(t2+a2)n+1 = dv, v = 12· −1n(t2+a2)n
∣∣∣∣ =
=1
a2Fn(t) +
t
2a2n(t2 + a2)n− 1
2a2nFn(t) =
t
2a2n(t2 + a2)n+
2n− 1
2na2Fn(t).
Primjer 2. Rijesiti integral ∫x6 + 2x4 + 2x2 − 1
x(x2 + 1)2dx.
10

Podintegralnu racionalnu funkciju mozemo zapisati pomocu pravog razlomka. Imamo
x6 + 2x4 + 2x2 − 1
x(x2 + 1)2= x+
x2 − 1
x(x2 + 1)2. (9)
Koristeci Teorem 1. pravi razlomak sa desne strane u (9) mozemo zapisati pomocuelementarnih razlomaka tj.
x2 − 1
x(x2 + 1)2=A
x+Bx+ C
x2 + 1+
Dx+ E
(x2 + 1)2. (10)
Jednakost (10) vrijedi samo ako konstante A, B, C, D, E zadovoljavaju sljedece jed-nadzbe
A+B = 0,
C = 0,
2A+B +D = 1,
C + E = 0,
A = −1.
(11)
Iz (11) dobivamo A = −1, B = 1, C = 0, D = 2, E = 0. Njihovim uvrstavanjem u (10)dobivamo za rjesenje polaznog integrala sljedece
∫x6 + 2x4 + 2x2 − 1
x(x2 + 1)2dx =
∫ (x− 1
x+
x
x2 + 1+
2x
(x2 + 1)2
)dx =
=x2
2− ln |x|+ 1
2ln(x2 + 1)− 1
x2 + 1+ C .
(12)
1.7 Integriranje transcedentnih funkcija
Za integral
I =
∫R(sinx, cosx)dx, (1)
gdje je R(u, v) racionalna funkcija po u i v, koristimo supstituciju
t = tgx
2, tj. x = 2 arctg t , (2)
sto daje
sinx =2t
1 + t2, cosx =
1− t2
1 + t2, dx =
2dt
1 + t2. (3)
Primjer 1. Rijesiti integral ∫1
1 + sin xdx.
11

Uvodimo supstituciju (2)-(3) i imamo∫1
1 + sin xdx =
∫1
1 + 2t1+t2
· 2dt
1 + t2=
∫�����(1 + t2)
(1 + t)2· 2dt
�����(1 + t2)=
= 2 · −1
1 + t+ C =
−2
1 + tg x2
+ C.
Integrali oblika ∫sin ax cos bxdx,
∫sin ax sin bxdx,
∫cos ax cos bxdx (4)
rjesavaju se transformacijom produkta sin ax · cos bx itd. u zbroj.
Primjer 2. Imamo∫sin 2x cosxdx =
1
2
∫(sin 3x+ sinx)dx = −1
6cos 3x− 1
2cosx+ C.
Za integrale∫
sinn xdx i∫
cosn xdx koristimo sljedece rekurzivne obrasce∫sinn xdx = − 1
nsinn−1 x · cosx+
n− 1
n
∫sinn−2 xdx, (5)∫
cosn xdx =1
ncosn−1 x · sinx+
n− 1
n
∫cosn−2 xdx, (6)
koji se lako dobiju parcijalnom integracijom, stavljajuci u = sinn−1 x i dv = sin xdx za prviintegral i analogno za drugi integral.
Ako je medutim n neparno onda integral (5) rjesavamo supstitucijom cosx = t, a integral(6) sa supstitucijom sinx = t.
Primjer 3.∫sin3 xdx =
∫(1− cos2 x) sinxdx =
∣∣∣∣ cosx = t− sinxdx = dt
∣∣∣∣ = −∫
(1− t2)dt =
= −t+t3
3+ C = − cosx+
cos3 x
3+ C.
Za integrale ∫R(sinx) · cosxdx ,
∫R(cosx) · sinxdx , (7)
gdje je R(u) racionalna funkcija po u, supstitucija sinx = t za prvi integral i cosx = t zadrugi integral u (7) daje ∫
R(sinx) cosxdx =
∫R(t)dt , (8)∫
R(cosx) sinxdx = −∫R(t)dt . (9)
12

1.8 Integracija algebarskih iracionalnih funkcija
Razmatrat cemo kojom supstitucijom t = ω(x) se neke klase iracionalnih algebarskih funk-cija transformiraju u racionalni oblik.Razmotrimo integral
I =
∫R
(x,
n
√ax+ b
cx+ d
)dx , (1)
gdje je R(u, v) racionalna funkcija po u i v, n ∈ N i a, b, c, d konstante.Stavimo
t =n
√ax+ b
cx+ d. (2)
Tada dobivamo
tn =ax+ b
cx+ di x = g(t) =
d · tn − ba− ctn
. (3)
Sada je
I =
∫R(g(t), t) g′(t)dt , (4)
gdje je pod integralom racionalna funkcija.Na integral (1) se svodi opciji integral oblika∫
R
(x,
(ax+ b
cx+ d
) pq
, . . . ,
(ax+ b
cx+ d
) rs
)dx (5)
svodenjem razlomaka pq, . . . , r
sna zajednicki nazivnik.
Integral
I =
∫xm(a+ bxn)pdx , (6)
gdje su a, b (a, b 6= 0) realni, a m, n i p racionalni brojevi, zove se binomni integral.Cebisev je dokazao da se binomni integral moze svesti na integral racionalne funkcije ako isamo ako je bar jedan od brojeva p, m+1
n, m+1
n+ p cijeli broj i to na sljedeci nacin:
1) ako je p ∈ Z supstitucija jes√x = t , (7)
gdje je s zajednicki nazivnik za m i n;
2) ako je m+1n∈ Z supstitucija je
s√a+ bxn = t , (8)
gdje je s nazivnik od p;
13

3) ako je (m+1n
+ p) ∈ Z supstitucija je
s√ax−n + b = t , (9)
gdje je s nazivnik od p.
Primjer 1. Rijesiti integral
I =
∫ √x · 4
√1− 1√
x3dx.
Ako taj integral zapisemo u obliku ∫x
12 (1− x−
32 )
14dx
vidimo da je to integral tipa (6). Kako je m+1n
=12
+1
− 32
= −1 ∈ Z uvodimo supstituciju 2) tj.
4
√1− x− 3
2 = t , dx = −2
3(1− t4)−
53 · (−4t3)dt , x = (1− t4)−
23
i dobivamo
I =8
3
∫t4
(1− t4)2dt =
2t
3(1− t4)− 1
6ln
1− t1 + t
− 1
3arctg t+ C.
U integralu
I =
∫R(x,
√ax2 + bx+ c)dx , (10)
gdje je R(u, v) racionalna funkcija po u i v, racionalizaciju funkcije pod integralom postizemotzv. Euler-ovim supstitucijama.
1) Ako je a > 0, onda je supstitucija
√ax2 + bx+ c = t− x
√a , (11)
pa imamo
x =t2 − c
2√at+ b
,√ax2 + bx+ c =
√at2 + bt+ c
√a
2√at+ b
, (12)
dx = 2
√at2 + bt+ c
√a
(2√at+ b)2
dt ; (13)
14

2) ako je c > 0 onda je supstitucija
√ax2 + bx+ c = xt+
√c , (14)
odakle je
x =2√ct− b
a− t2,√ax2 + bx+ c =
√ct2 − bt+
√c · a
a− t2,
dx = 2 ·√ct2 − bt+ a
√c
(a− t2)2dt;
(15)
3) ako su x1 i x2 nule trinoma ax2 + bx+ c, onda jeax2 + bx+ c = a(x− x1)(x− x2) pa supstitucijom
√ax2 + bx+ c = t(x− x1), (16)
nakon kvadriranja i kracenja sa x− x1, dobivamo
x =−ax2 + x1t
2
t2 − a,√ax2 + bx+ c =
a(x1 − x2)t
t2 − a, dx =
2a(x2 − x1)t
(t2 − a)2dt. (17)
Dakle, sve tri Euler-ove supstitucije daju za x,√ax2 + bx+ c i dx racionalne izraze po t.
Njihovim uvrstavanjem u (10) postize se racionalizacija funkcije pod integralom.
15
2 ODREDENI INTEGRAL
2.1 Problem povrsine
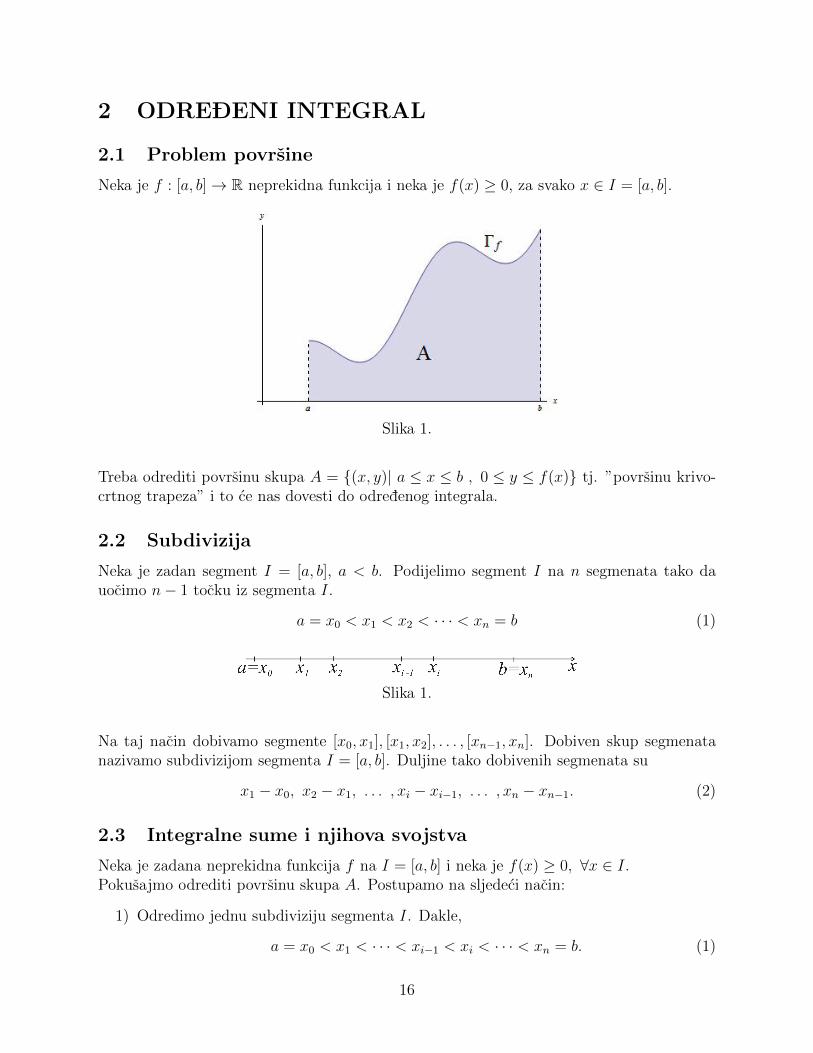
Neka je f : [a, b]→ R neprekidna funkcija i neka je f(x) ≥ 0, za svako x ∈ I = [a, b].
Slika 1.
Treba odrediti povrsinu skupa A = {(x, y)| a ≤ x ≤ b , 0 ≤ y ≤ f(x)} tj. ”povrsinu krivo-crtnog trapeza” i to ce nas dovesti do odredenog integrala.
2.2 Subdivizija
Neka je zadan segment I = [a, b], a < b. Podijelimo segment I na n segmenata tako dauocimo n− 1 tocku iz segmenta I.
a = x0 < x1 < x2 < · · · < xn = b (1)
Slika 1.
Na taj nacin dobivamo segmente [x0, x1], [x1, x2], . . . , [xn−1, xn]. Dobiven skup segmenatanazivamo subdivizijom segmenta I = [a, b]. Duljine tako dobivenih segmenata su
x1 − x0, x2 − x1, . . . , xi − xi−1, . . . , xn − xn−1. (2)
2.3 Integralne sume i njihova svojstva
Neka je zadana neprekidna funkcija f na I = [a, b] i neka je f(x) ≥ 0, ∀x ∈ I.Pokusajmo odrediti povrsinu skupa A. Postupamo na sljedeci nacin:
1) Odredimo jednu subdiviziju segmenta I. Dakle,
a = x0 < x1 < · · · < xi−1 < xi < · · · < xn = b. (1)
16
Slika 1.
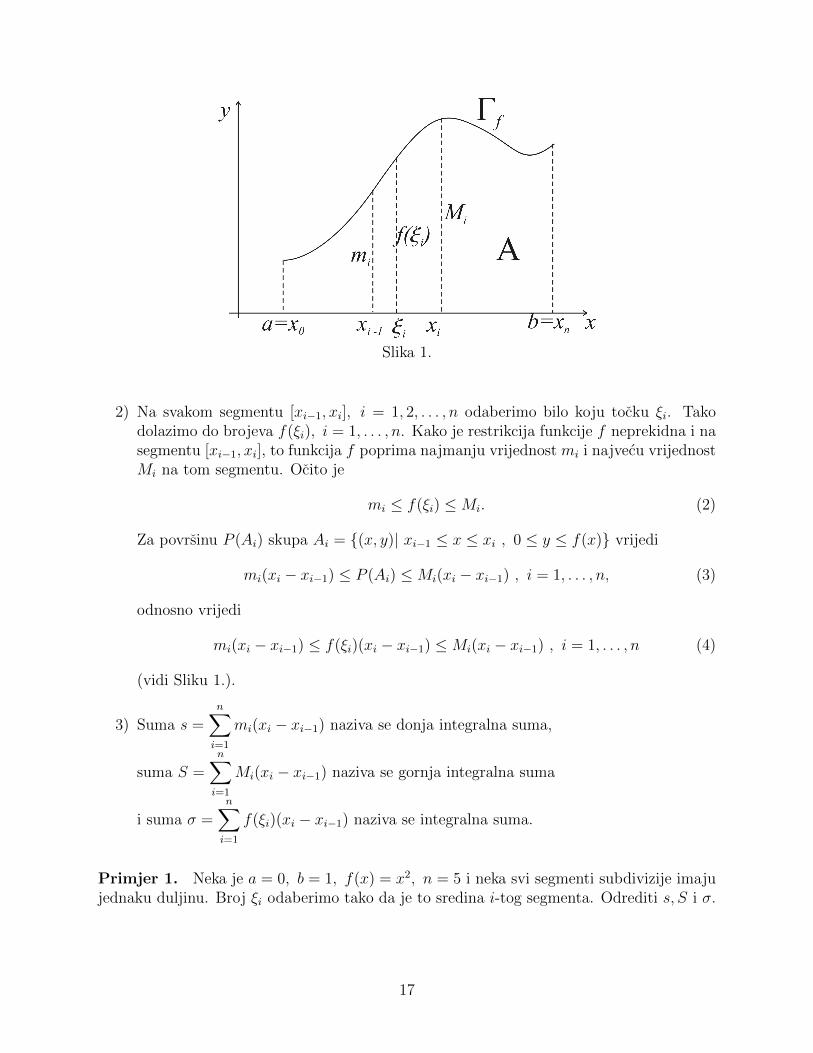
2) Na svakom segmentu [xi−1, xi], i = 1, 2, . . . , n odaberimo bilo koju tocku ξi. Takodolazimo do brojeva f(ξi), i = 1, . . . , n. Kako je restrikcija funkcije f neprekidna i nasegmentu [xi−1, xi], to funkcija f poprima najmanju vrijednost mi i najvecu vrijednostMi na tom segmentu. Ocito je
mi ≤ f(ξi) ≤Mi. (2)
Za povrsinu P (Ai) skupa Ai = {(x, y)| xi−1 ≤ x ≤ xi , 0 ≤ y ≤ f(x)} vrijedi
mi(xi − xi−1) ≤ P (Ai) ≤Mi(xi − xi−1) , i = 1, . . . , n, (3)
odnosno vrijedi
mi(xi − xi−1) ≤ f(ξi)(xi − xi−1) ≤Mi(xi − xi−1) , i = 1, . . . , n (4)
(vidi Sliku 1.).
3) Suma s =n∑i=1
mi(xi − xi−1) naziva se donja integralna suma,
suma S =n∑i=1
Mi(xi − xi−1) naziva se gornja integralna suma
i suma σ =n∑i=1
f(ξi)(xi − xi−1) naziva se integralna suma.
Primjer 1. Neka je a = 0, b = 1, f(x) = x2, n = 5 i neka svi segmenti subdivizije imajujednaku duljinu. Broj ξi odaberimo tako da je to sredina i-tog segmenta. Odrediti s, S i σ.
17

Slika 2.
i 1 2 3 4 5xi 0,2 0,4 0,6 0,8 1,0ξi 0,1 0,3 0,5 0,7 0,9mi 02 0, 22 0, 42 0, 62 0, 82
Mi 0, 22 0, 42 0, 62 0, 82 1, 02
Slika 3.
Imamo
s =5∑i=1
mi(xi − xi−1) = 0, 2(02 + 0, 22 + 0, 42 + 0, 62 + 0, 82) = 0, 240 ,
S =5∑i=1
Mi(xi − xi−1) = 0, 2(0, 22 + 0, 42 + 0, 62 + 0, 82 + 1, 02) = 0, 440 ,
σ =5∑i=1
f(ξi)(xi − xi−1) = 0, 2(0, 12 + 0, 32 + 0, 52 + 0, 72 + 0, 92) = 0, 330.
Ocigledno vrijedi s ≤ σ ≤ S. A kako je povrsina P (A) = 13
jasno je da takoder vrijedis ≤ P (A) ≤ S.
Dakle, pretpostavili smo da je f : [a, b] → R neprekidna funkcija, a to znaci i da jerestrikcija od f na segmentu [xi−1, xi] neprekidna. Neprekidna funkcija na [xi−1, xi] primaminimalnu i maksimalnu vrijednost. Dakle,
mi ≤ f(ξi) ≤Mi , xi−1 ≤ ξi ≤ xi. (5)
Mnozenjem te nejednakosti sa ∆ix = xi − xi−1 i sumiranjem dobivamo
n∑i=1
mi∆ix ≤n∑i=1
f(ξi)∆ix ≤n∑i=1
Mi∆ix, (6)
tj.s ≤ σ ≤ S. (7)
18

Ako je zadana subdivizija ∆ : a = x0 < x1 < · · · < xn = b, onda su brojevi s i S jednoznacnoodredeni. Izborom tocaka ξi mozemo jos uvijek utjecati na vrijednost sume σ. No, za svakiizbor tocaka ξi vrijedi s ≤ σ ≤ S. Lako se uvjerimo da vrijedi
m(b− a) ≤ s ≤ σ ≤ S ≤M(b− a) , (8)
za bilo koju subdiviziju ∆. Ovdje je m minimalna vrijednost, a M maksimalna vrijednostfunkcije f na I = [a, b]. Vrijede svojstva:
1) Ako zadanu subdiviziju ∆ : a = x0 < x1 < · · · < xn = b profinimo, tj. tockamax0, x1, . . . , xn, dodamo nove tocke iz I i tako dobivamo novu subdiviziju ∆, ondavrijedi
s ≤ s′ , S ′ ≤ S. (9)
Dakle, dodavanjem novih tocaka segmenta I donje integralne sume mogu samo rasti,a gornje inegralne sume samo padati (smanjivati se).
2) Neka su ∆1 i ∆2 dvije subdivizije segmenta I = [a, b] i pripadne integralne sume s1, S1,tj. s2, S2, tada vrijedi
s2 ≤ S1 , s1 ≤ S2 (10)
tj. bilo koja donja integralna suma nije veca od bilo koje gornje integralne sume.
2.4 Definicija odredenog integrala
Neka je f : [a, b]→ R ogranicena funkcija tj. postoje brojevi c i d takvi da je
c ≤ f(x) ≤ d , ∀x ∈ [a, b] = I ⊆ R . (1)
To znaci da je skup K = {f(x)| x ∈ I} ogranicen odozdo i odozgo, pa postoje inf K = m isupK = M . Da smo pretpostavili neprekidnost funkcije f na I, onda bi bila m minimalna,a M maksimalna vrijednost funkcije f na I. Za integralne sume funkcije f vrijedi
m(b− a) ≤ s ≤ σ ≤ S ≤M(b− a). (2)
Neka je A skup svih brojeva s koje dobivamo za razne subdivizije ∆, B skup svihbrojeva S i C skup svih brojeva σ koje dobivamo za razne subdivizije i razliciti izbor tocakaξi. Skupovi A, B i C su ograniceni odozgo i odozdo. Postoje brojevi
supA = I∗(f ; [a, b]), infB = I∗(f, [a, b]). (3)
Broj I∗(f ; [a, b]) zovemo donji Riemannov intergral, a broj I∗(f, [a, b]) zovemo gornjiRiemannov integral funkcije f na I = [a, b]. Iz definicije integrala I∗(f ; [a, b]) i I∗(f, [a, b])slijedi
s ≤ I∗(f ; [a, b]) ≤ I∗(f ; [a, b]) ≤ S. (4)
19

Definicija 1. Za ogranicenu funkciju f : [a, b]→ R kazemo da je integrabilna na segmentu[a, b] ako je
I∗(f ; [a, b]) = I∗(f ; [a, b]). (5)
Onda pisemo
I∗(f ; [a, b]) = I∗(f ; [a, b]) = I =
∫ b
a
f(x)dx (6)
i taj broj zovemo odredeni integral funkcije f na segmentu [a, b].
Sada zelimo navesti dva vazna teorema, ali bez dokaza.
Teorem 1. a) Ako je funkcija f neprekidna na I = [a, b] onda je i integrabilna na I.b) Ako ogranicena funkcija f : I → R ima konacno mnogo prekida onda je ona i integrabilnana I = [a, b].
Teorem 2. Da bi ogranicena funkicja f : [a, b] → R bila integrabilna na [a, b] nuzno je idovoljno da za svaki ε > 0 postoji takva subdivizija ∆ segmenta [a, b] za koju je
S − s < ε. (7)
Primjer 1. Dokazimo da je f(x) = C, C konstanta, integrabilna na [a, b].Za zadanu subdiviziju ∆ imamo
S =n∑i=1
Mi(xi − xi−1), s =n∑i=1
mi(xi − xi−1), S − s =n∑i=1
(Mi −mi)(xi − xi−1)
Kako je Mi −mi = 0 slijedi zakljucak
S − s = 0
za svaku subdviziju ∆.
2.5 Osnovna svojstva odredenog integrala
Po definiciji mozemo uzeti sljedeca dva svojstva
1/ ∫ a
a
f(x)dx = 0, (1)
2/ ∫ b
a
f(x)dx = −∫ a
b
f(x)dx, (a < b). (2)
Iz svojstava integralnih suma i definicije integrala slijedi:
3/ ∫ b
a
Cf(x)dx = C
∫ b
a
f(x)dx, C = const, (3)
20

4/ ∫ b
a
[f(x)± g(x)]dx =
∫ b
a
f(x)dx±∫ b
a
g(x)dx. (4)
Iz definicije integrala slijedi da postojanje integrala ne ovisi o subdiviziji segmenta[a, b]. Bitno je max1≤i≤n|xi − xi−1| → 0 za n → ∞. Neka je c ∈ 〈a, b〉 i neka je c usvakoj subdiviziji tocka koja dijeli [a, b]. Tada se integralne sume mogu pisati u obliku
σ =∑
1
f(ξi)∆ix+∑
2
f(ξi)∆ix, (5)
gdje∑
1 odgovara segmentu [a, c], a∑
2 segmentu [c, b]. Jednakost (5) nas vodi nazakljucak da vrijedi
5/ ∫ b
a
f(x)dx =
∫ c
a
f(x)dx+
∫ b
c
f(x)dx. (6)
Moze se pokazati da jednakost (6) vrijedi i u slucaju ako je f integrabilna na najduzemod segmenata [a, b], [a, c] i [c, b], onda je ona integrabilna i na ostalim segmentima ivrijedi (6), bez obzira na raspored tocaka a, b i c.
Ako je f(x) > 0 na I = [a, b], a < b, onda je σ =∑
1 f(ξi)∆ix > 0 sto nas dovodi dazakljucka da vrijedi
6/ ∫ b
a
f(x)dx > 0. (7)
Iz definicije integrala slijedi
m(b− a) ≤∫ b
a
f(x)dx ≤M(b− a), (a < b), (8)
ako je
m ≤ f(x) ≤M na I = [a, b]. (9)
Ako je funkcija f neprekidna na I = [a, b] i ako su m i M u (9) minimum i maximumfunkcije f na I onda, zapisujuci (8) u obliku
m ≤ 1
b− a
∫ b
a
f(x)dx ≤M, (10)
i koristeci svojstvo da neprekidna funkcija poprima svaku vrijednost izmedu m i M ,zakljucujemo da postoji bar jedan c ∈ [a, b] takav da je
21
7/1
b− a
∫ b
a
f(x)dx = f(c). (11)
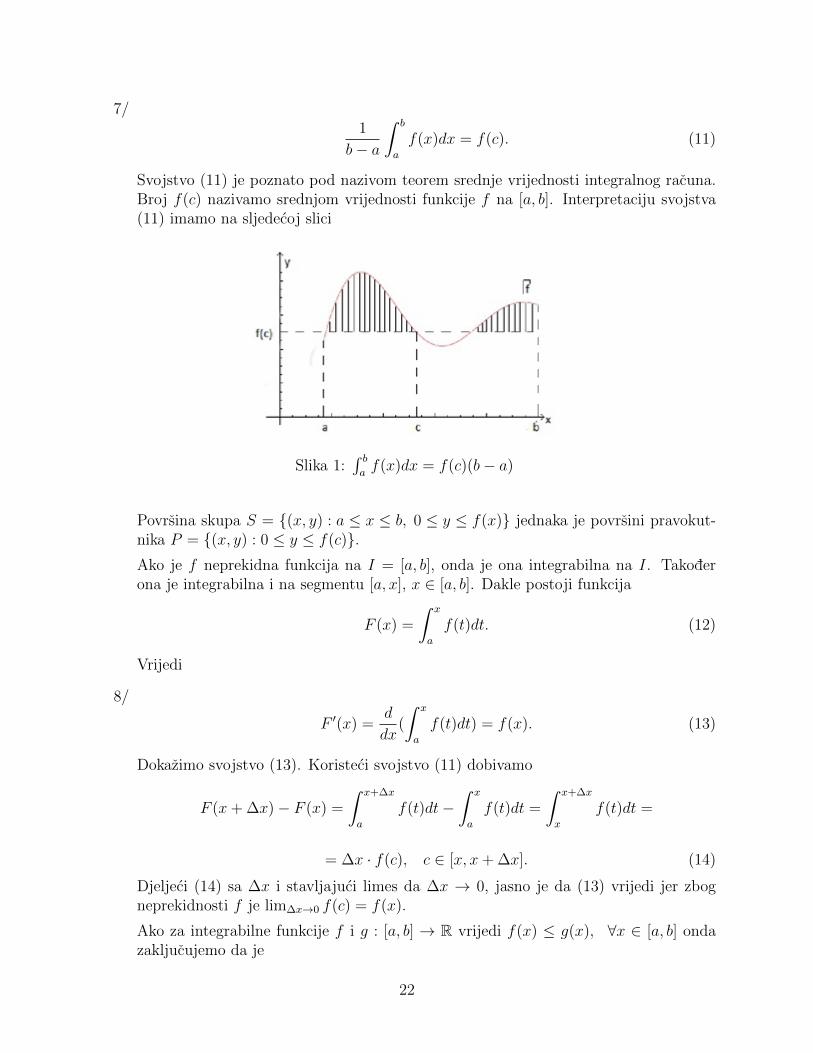
Svojstvo (11) je poznato pod nazivom teorem srednje vrijednosti integralnog racuna.Broj f(c) nazivamo srednjom vrijednosti funkcije f na [a, b]. Interpretaciju svojstva(11) imamo na sljedecoj slici
Slika 1:∫ baf(x)dx = f(c)(b− a)
Povrsina skupa S = {(x, y) : a ≤ x ≤ b, 0 ≤ y ≤ f(x)} jednaka je povrsini pravokut-nika P = {(x, y) : 0 ≤ y ≤ f(c)}.Ako je f neprekidna funkcija na I = [a, b], onda je ona integrabilna na I. Takoderona je integrabilna i na segmentu [a, x], x ∈ [a, b]. Dakle postoji funkcija
F (x) =
∫ x
a
f(t)dt. (12)
Vrijedi
8/
F ′(x) =d
dx(
∫ x
a
f(t)dt) = f(x). (13)
Dokazimo svojstvo (13). Koristeci svojstvo (11) dobivamo
F (x+ ∆x)− F (x) =
∫ x+∆x
a
f(t)dt−∫ x
a
f(t)dt =
∫ x+∆x
x
f(t)dt =
= ∆x · f(c), c ∈ [x, x+ ∆x]. (14)
Djeljeci (14) sa ∆x i stavljajuci limes da ∆x → 0, jasno je da (13) vrijedi jer zbogneprekidnosti f je lim∆x→0 f(c) = f(x).
Ako za integrabilne funkcije f i g : [a, b] → R vrijedi f(x) ≤ g(x), ∀x ∈ [a, b] ondazakljucujemo da je
22

9/ ∫ b
a
f(x)dx ≤∫ b
a
g(x)dx. (15)
Ako je f integrabilna na [a, b], onda je i x→ |f(x)| integrabilna na [a,b] i vrijedi
10/
|∫ b
a
f(x)dx| ≤∫ b
a
|f(x)|dx. (16)
2.6 Newton-Leibnizova formula
Svojsto 8/ odredenog integrala mozemo ovako interpretirati. Funkcija F (x) =∫ xaf(t)dt je
jedna primitivna funkcija funkcije f . Naime, F ′(x) = f(x). Iz toga slijedi osnovna formulaintegralnog racuna i to Newton-Leibnizova formula.Od ranije znamo da bilo koja primitivna funkcija funkcije f razlikuje se od primitivnefunkcije F za konstantu. Dakle, ako je φ primitivna funkcija od f onda je
F (x) = φ(x) + c, φ′(x) = f(x). (1)
Kako je F (a) = 0, onda iz (1) dobivamo
φ(a) + C = 0, (2)
tj.C = −φ(a). (3)
Uvrstimo(3) u (1) pa imamoF (x) = φ(x)− φ(a), (4)
odnosnoF (b) = φ(b)− φ(a). (5)
Prema definiciji funkcije F , (5) mozemo pisati∫ b
a
f(x)dx = φ(b)− φ(a). (6)
Izracunavanje∫ baf(x)dx svodi se na pronalazenje primitivne funkcije φ za funkciju f .
Primjer 1. Izracunati∫ 1
0x3dx,
∫ 1
0xndx,
∫ 1
−1x3dx,
∫ π0
sinxdx,∫ π
0cosxdx,
∫ 2π
0sinxdx,∫ 2π
0cosxdx,
∫ 1
0dxx2+1
,∫ 2
1exdx.
23

Imamo ∫ 1
0
x3dx =x4
4|10 =
14
4− 04
4=
1
4,∫ 1
0
xndx =xn+1
n+ 1|10 =
1n+1
n+ 1− 0n+1
n+ 1=
1
n+ 1,∫ 1
−1
x3dx =x4
4|1−1 =
1
4− 1
4= 0,∫ π
0
sinxdx = − cosx |π0 = −(−1) + 1 = 2,∫ π
0
cosxdx = sinx |π0 = 0− 0 = 0,∫ 2π
0
sinxdx = − cosx |2π0 = −1 + 1 = 0,∫ 1
0
dx
x2 + 1= arctg x |10 =
π
4− 0 =
π
4,∫ 2
1
exdx = ex |21 = e2 − e.
Teorem 1. Neka su u, v : I → R diferencijabilne na I = 〈a, b〉 sa neprekidnim derivacijamau′, v′ na I. Tada je na I∫
udv = u · v −∫vdu,
∫vdu = u · v −
∫udv (7)
i za sve c, d ∈ I vrijedi ∫ d
c
udv = [u · v]dc −∫ d
c
vdu. (8)
Dokaz. Funkcija u·v je primitivna funkcija funkcije u′·v+u·v′ na I pa po Newton-Leibnizovojformuli za sve c, d ∈ I imamo ∫ d
c
[u′ · v + u · v′]dx = [u · v]dc (9)
ili ∫ d
c
v · u′dx+
∫ d
c
u · v′dx =
∫ d
c
vdu+
∫ d
c
udv = [u · v]dc . (10)
Teorem 2 (Zamjena varijabli u integralu). Neka su J i I otvoreni intervali u R. Neka jef : I → R neprekidna funkcija na I i neka funkcija g : J → I ima neprekidnu derivaciju naJ . Tada za sve t ∈ J , za sve x = g(t) iz I i za sve α i β ∈ J vrijedi∫
f(x)dx =
∫f(g(t)) · g′(t)dt (11)
24

i ∫ β
α
f(g(t)) · g′(t)dt =
∫ g(β)
g(α)
f(x)dx. (12)
Dokaz. Funkcija f ima primitivnu funkciju F na I (npr. F (x) =∫ xαf(t)dt), a F ◦ g je
primitivna funkcija od funkcije (f ◦ g) · g′ na J . Zato je∫f(x)dx = F (x) + C, x ∈ I (13)
i ∫f(g(t)) · g′(t)dt = F (g(t)) + C, t ∈ J. (14)
Odavde za svako t ∈ J i sve g(t) = x ∈ I imamo∫f(x)dx = F (x) + C = F (g(t)) + C =
∫f(g(t)) · g′(t)dt. (15)
Prema Newton-Leibnizovoj formuli je∫ β
α
f(g(t)) · g′(t)dt = F (g(β))− F (g(α)) =
∫ g(β)
g(α)
f(x)dx. (16)
Ako je g jos i injekcija onda uz oznake a = g(α), b = g(β) dobivamo∫ b
a
f(x)dx =
∫ β
α
f(g(t)) · g′(t)dt. (17)
Primjer 2. Izracunati integral
I =
∫ 1
0
√1− x2dx.
Imamo
I =
∫ 1
0
√1− x2dx =
∣∣∣∣ x = sin tdx = cos tdt
∣∣∣∣ =
∫ π2
0
cos2 tdt =
∫ π2
0
1 + cos 2t
2dt =
=1
2t |
π20 +
1
4sin 2t |
π20 =
π
4+
1
4· 0 =
π
4.
Primjer 3. Izracunati
a) I =∫ 1
−2
√2− xdx,
b) I =∫ π
2
0dx
2+cos t.
25

Slika 1.
a) ∫ 1
−2
√2− xdx =
∣∣∣∣ 2− x = t−dx = dt
∣∣∣∣ = −∫ 1
4
t12dt = −t
32
32
|14 = −2√t3
3|14 = −2
3+
16
3=
14
3,
b) ∫ π2
0
dx
2 + cos t=
∣∣∣∣∣∣tan x
2= t
cosx = 1−t21+t2
dx = 2dt1+t2
∣∣∣∣∣∣ =
∫ 1
0
2dt1+t2
2+2t2+1−t21+t2
= 2
∫ 1
0
dt
3 + t2=
=2√3
arctg (t√3
) |10 =2√3
arctg (
√3
3)− 0 =
2√3· π
6=
π
3√
3.
2.7 Nepravi (nesvojstveni) integral
Ako umjesto [a, b] gledamo interval [a, b〉 onda integral funkcije f na [a, b〉 oznacavamo sa∫ b−af(x)dx i definiramo sa ∫ b−
a
f(x)dx = limB→b−
∫ B
a
f(x)dx (1)
kada god taj limes postoji, pri cemu pretpostavljamo da je za svako B ∈ [a, b〉 funkcija fneprekidna na [a,B]. Kada [a, b] zamjenimo sa skupom [a,+∞〉 onda integral funkcije f na[a,+∞〉 oznacavamo sa
∫ +∞a
f(x)dx i definiramo sa∫ +∞
a
f(x)dx = limB→+∞
∫ B
a
f(x)dx (2)
kada god limes na desnoj strani postoji. U tom slucaju se kaze da (1) tj. (2) konvergiraju izovemo ih nepravim (nesvojstvenim) integralima.
26

Kazemo da integral (1), odnosno (2) apsolutno konvergira ako∫ b−a|f(x)|dx, odnosno∫ +∞
a|f(x)|dx konvergira. Ako integrali (1) i (2) konvergiraju, a ne konvergiraju apsolutno,
onda kazemo da oni uvjetno konvergiraju.Analogno (1) definiramo ∫ b
a+f(x)dx = lim
A→a+
∫ b
A
f(x)dx (3)
i ∫ b−
a+f(x)dx = lim
A→a+
∫ c
A
f(x)dx+ limB→b−
∫ B
c
f(x)dx, (4)
gdje je −∞ ≤ a < c < b ≤ +∞. Lako se dokaze tvrdnja: Ako integrali∫ b−
a
f(x)dx i
∫ b−
a
g(x)dx (5)
konvergiraju, onda je, za α, β ∈ R∫ b−
a
(αf(x) + βg(x))dx = α
∫ b−
a
f(x)dx+ β
∫ b−
a
g(x)dx, (6)
tj. nepravi integral je linearna funkcija.
Primjer 1. Izracunati integral
∫ 1
−1
1
x2dx.
Postupajuci po Newton-Leibnizovoj formuli dobili bi∫ 1
−1
1
x2dx =
−1
x|1−1 = −1− 1 = −2.
No kako je podintegralom funkcija pozitivna to smo ocekivali da gornji rezultat bude pozi-tivan. U cemu je greska?
Funkcija f(x) = 1x2
nije ogranicena na [−1, 1]. Osim toga f nije definirana u tocki x = 0i za takvu funkciju nismo definirali odredeni integral.
Taj integral je nepravi i ispitujemo njegovu konvergenciju na sljedeci nacin.
∫ 1
−1
1
x2dx = 2
∫ 1
0
1
x2dx = 2 lim
ε→0+
∫ 1
ε
1
x2dx = 2 lim
ε→0+(−1
x)|1ε = 2 lim
ε→0+(−1 +
1
ε) = +∞.
Dakle, taj integral divergira.
Primjer 2. Izracunati integral∫ +∞
11x2dx. Imamo∫ +∞
1
1
x2dx = lim
A→+∞
∫ A
1
1
x2dx = lim
A→+∞(−1
x)|A1 = lim
A→+∞(−1
A+ 1) = 1.
Dakle, taj nepravi integral konvergira.
27

Teorem 1. Neka je a > 0 i neka funkcije f, g : [a,+∞〉 → R zadovoljavaju uvjete
1.0 ≤ f(x) ≤ g(x), x > x0 > a, (7)
2.f i g su integrabilne na [a,B], a < B < +∞. (8)
Onda konvergencija integrala∫ +∞a
g(x)dx povlaci konvergenciju integrala∫ +∞a
f(x)dx, a
divergencija integrala∫ +∞a
f(x)dx povlaci divergenciju integrala∫ +∞a
g(x)dx.
Dokaz. Funkcija F (x) =∫ xaf(t)dt raste i vrijedi
F (x) ≤∫ x
a
g(t)dt, (9)
pa konvergencija integrala∫ +∞a
g(t)dt dovodi do zakljucka F (+∞) ∈ R, sto znaci da integral∫ +∞a
f(x)dx konvergira. Ako pak integral∫ +∞a
f(x)dx divergira, onda je F (+∞) = +∞ pa
iz (9) zakljucujemo da integral∫ +∞a
g(x)dx divergira.
Primjer 3. Razmotrimo funkciju
Γ(α) =
∫ +∞
0
e−xxα−1dx, α > 1 (10)
koja se zove gama-funkcija ili Eulerov integral 2. vrste. Za α ≥ 1 imamo
e−xxα+1 → 0, za x→ +∞, (11)
pa postoji a > 0 takav da
(x ≥ a)⇒ (e−xxα−1x2 = e−xxα+1 ≤ 1)⇒ e−xxα−1 ≤ 1
x2. (12)
Kako∫ +∞a
1x2dx konvergira, prema Teoremu 1 , zbog (12) konvergira i integral
∫ +∞a
e−xxα−1dx
a time i integral∫ +∞
0e−xxα−1dx.
Parcijalnom integracijom dobivamo∫ t
a
e−xxαdx = −e−xxα|t0 +
∫ t
0
e−xαxα−1dx. (13)
Kako e−xxα → 0 za x→ +∞ imamo iz ((13)) da je
Γ(α + 1) = αΓ(α), α ≥ 1, (14)
a
Γ(1) =
∫ +∞
0
e−xdx = 1 (15)
28
pa za n ∈ N zakljucujemo da je
Γ(n+ 1) = nΓ(n) = n(n− 1)Γ(n− 1) = · · · = n(n− 1) . . . 1 = n!, (16)
tj.restrikcija funkcije Γ na skup N je
Γ|N(n) = n!. (17)
2.8 Primjena odredenog integrala
1/ Povrsina pseudotrapeza
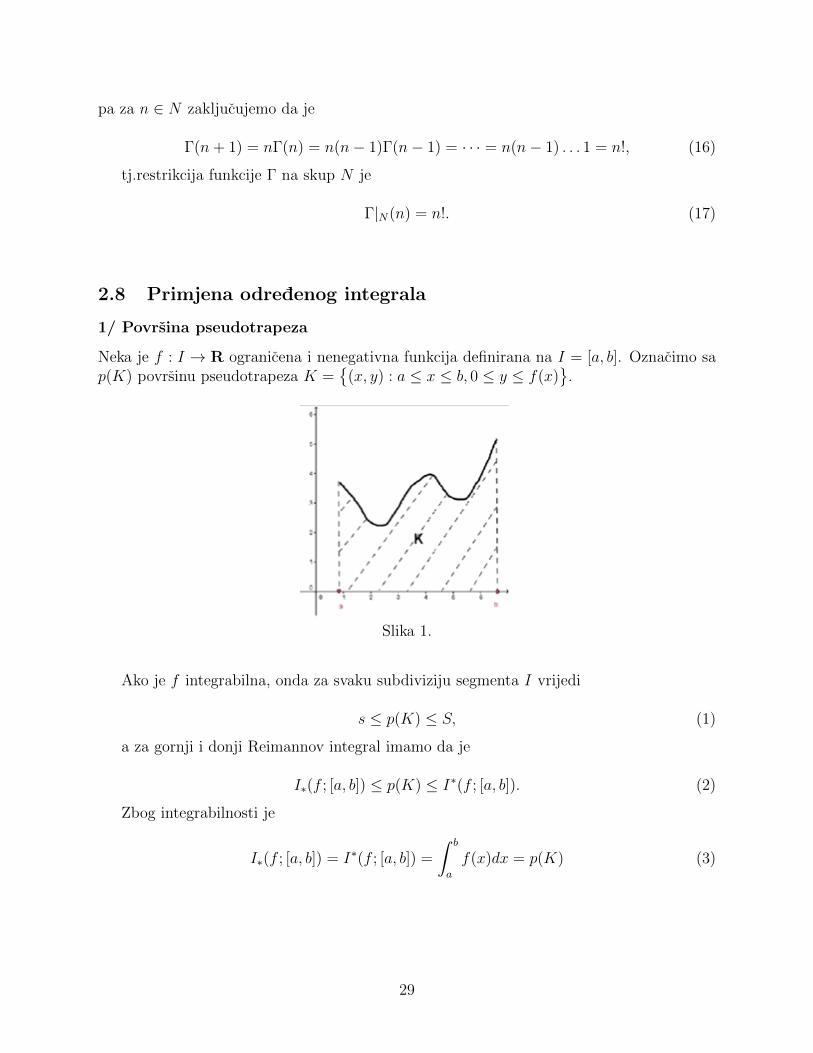
Neka je f : I → R ogranicena i nenegativna funkcija definirana na I = [a, b]. Oznacimo sap(K) povrsinu pseudotrapeza K =
{(x, y) : a ≤ x ≤ b, 0 ≤ y ≤ f(x)
}.
Slika 1.
Ako je f integrabilna, onda za svaku subdiviziju segmenta I vrijedi
s ≤ p(K) ≤ S, (1)
a za gornji i donji Reimannov integral imamo da je
I∗(f ; [a, b]) ≤ p(K) ≤ I∗(f ; [a, b]). (2)
Zbog integrabilnosti je
I∗(f ; [a, b]) = I∗(f ; [a, b]) =
∫ b
a
f(x)dx = p(K) (3)
29

2/ Povrsina pseudotrokuta u polarnim koordinatama
Neka je u ravnini zadan sustav polarnih koordinata r, θ. Neka je r = r(θ) neprekidnafunkcija na [α, β]. Tada radijus vektori θ = α, θ = β i krivulja r = r(θ) ogranicavajudio ravnine K koji se zove pseudotrokut. Povrsinu p(K) pseudotrokuta K odredujemo nasljedeci nacin.
Slika 1.
Neka je α = θ0 < θ1 < θ2 < · · · < θn = β subdivizija segmenta [α, β], a Mk i mk najvecai najmanja vrijednost funkcije r = r(θ) na segmentu [θk−1, θk]. Izracunamo povrsine kruznihisjecaka polumjera mk i Mk i kuta θk − θk−1. One su
1
2m2k(θk − θk−1) i
1
2M2
k (θk − θk−1). (1)
Za povrsinu p(K) pseudo trapeza uvijek vrijedi
sn ≤ p(K) ≤ Sn, (2)
gdje su sn i Sn donja i gornja integralna suma definirane sa
sn =1
2
n∑k=1
m2k(θk − θk−1) i Sn ==
1
2
n∑k=1
M2k (θk − θk−1). (3)
One su integralne sume funkcije 12r2(θ). Na isti nacin kao u definiciji odredenog integrala
odredujemo supremum svih donjih integrabilnih suma i infimum svih gornjih integrabilnihsuma i ako su oni jednaki dobivamo odreden integral
I =1
2
∫ β
α
r2(θ)dθ (4)
i vrijedi
p(K) =1
2
∫ β
α
r2(θ)dθ. (5)
30

3/ Duljina luka
Neka je f : [a, b] → R neprekidna funkcija. Onda njezin graf Γf ={
(x, f(x)) : a ≤ x ≤ b}
nazivamo lukom. Tocka A(a, f(a)) je pocetna, a B(b, f(b)) je krajnja tocka luka. Izvrsimosubdiviziju segmenta [a, b] sa
s : a = x0 < x1 < · · · < xn = b, ∆ix = xi − xi−1. (1)
Pomocu te subdivizije dolazimo do sljedecih tocaka grafa funkcije
A, T1, T2, . . . , Ti−1, Ti, . . . , B. (2)
Udaljenost tocaka Ti−1 i Ti je
di =√
(xi − xi−1)2 + (f(xi)− f(xi−1))2. (3)
Suma svih udaljenosti di je
Sn =n∑i=1
√(xi − xi−1)2 + (f(xi)− f(xi−1))2. (4)
Slika 1.
Oznacimo sa S skup svih brojeva Sn koje dobivamo za razne izbore subdivizija. SkupS je ogranicen odozdo jer je svaki Sn ≥ d(A,B). Ako je skup S ogranicen i odozgo ondapostoji supremum skupa S, L = supS. U tom slucaju kazemo da luk Γf ima konacnuduljinu i da je njegova duljina broj L.
Teorem 1. Neka je f : [a, b] → R neprekidna funkcija koja ima neprekidnu derivaciju na〈a, b〉. Duljina luka Γf je broj
L =
∫ b
a
√1 + (f ′(x))2dx. (5)
31
Dokaz. Duljina i-te tetive je
di =√
(xi − xi−1)2 + (f(xi)− f(xi−1))2 =
√1 + (
f(xi)− f(xi−1)
xi − xi−1
)2(xi − xi−1). (6)
Prema Lagrangeovom teoremu srednje vrijednosti zakljucujemo da postoji broj ξi takavda je
f(xi)− f(xi−1)
xi − xi−1
= f ′(ξi), xi−1 < ξi < xi (7)
Koristeci (7) iz (6) dobivamo
di =√
1 + f ′(ξi)2∆ix, (8)
a suma Sn je
Sn =n∑i=1
√1 + f ′(ξi)2∆ix. (9)
To je integralna suma neprekidne funkcije x→√
1 + (f ′(x))2 na segmentu [a, b]. SumeSn rastu ako se u subdiviziji dodaju nove tocke i prema tome one se ponasaju kao donjeintegralne sume funkcije x →
√1 + (f ′(x))2 na [a, b]. Prema tome one nas dovode do
zakljucka da je
L =
∫ b
a
√1 + f ′(ξi)2dx. (10)
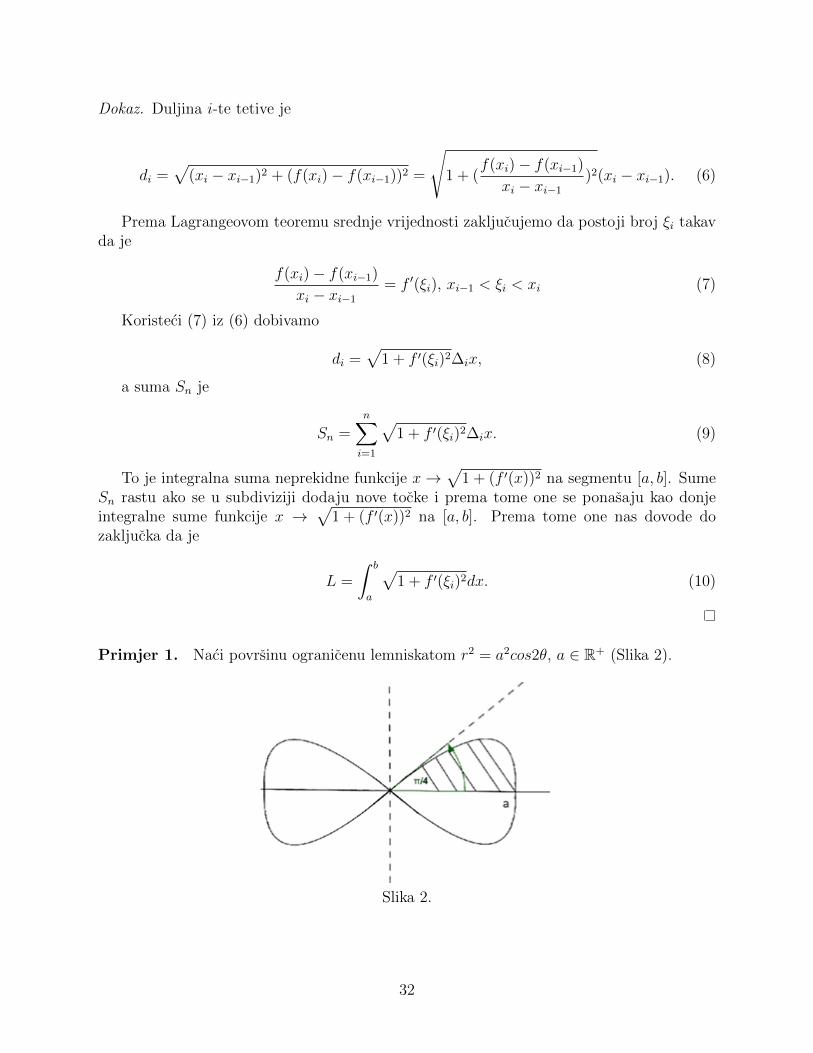
Primjer 1. Naci povrsinu ogranicenu lemniskatom r2 = a2cos2θ, a ∈ R+ (Slika 2).
Slika 2.
32

Imamo
P =1
24
∫ π4
0
r2(θ)dθ = 2
∫ π4
0
a2cos2θdθ =2a2
2sin2θ|
π40 = a2.
Primjer 2. Odrediti duljinu kruznice polumjera r.Neka je
x2 + y2 = r2
trazena kruznica (Slika 3). Imamo
y′ =−x√r2 − x2
i za duljinu luka, pomocu formule (10) dobivamo
L = 2
∫ r
−r
√1 +
x2
r2 − x2dx = 2
∫ r
−r
r√r2 − x2
dx =
∣∣∣∣ x = r sin tdx = r cos tdt
∣∣∣∣ = 2r
∫ π2
−π2
r cos tdt
r cos t
= 2rt|π2−π2
= 2rπ.
Slika 3.
Primjer 3. Odrediti formule za izracunavanje duljine luka funkcije zadane parametarski,odnosno zadane u polarnim koordinatama.Neka je krivulja Γf zadana parametarski sa x = ϕ(t),y = ψ(t),t ∈ [α, β] i neka funkcije ϕ, ψimaju neprekidne derivacije na [α, β]. Ako je a = ϕ(α), b = ψ(β) onda iz (10) dobivamo
L =
∫ b
a
√1 + (f ′(x))2dx =
∫ β
α
√1 + (
ψ′(t)
ϕ′(t))2ϕ′(t)dt =
∫ β
α
√(ψ′(t))2 + (ϕ′(t))2dt. (11)
33
Ako je krivulja zadana u polarnim koordinatama sa r = f(θ), θ1 ≤ θ ≤ θ2, onda zbogcinjenice da je x = rcosθ i y = rsinθ, dobivamo
x = f(θ)cosθ i y = f(θ)sinθ, θ1 ≤ θ ≤ θ2 (12)
sto su parametarske jednadzbe krivulje. Kako je
(dx
dθ)2 + (
dy
dθ)2 = (f ′(θ))2 + (f(θ))2 (13)
iz ((11)) dobivamo
L =
∫ θ2
θ1
√(f ′(θ))2 + (f(θ))2dθ. (14)
4/ Volumen tijela
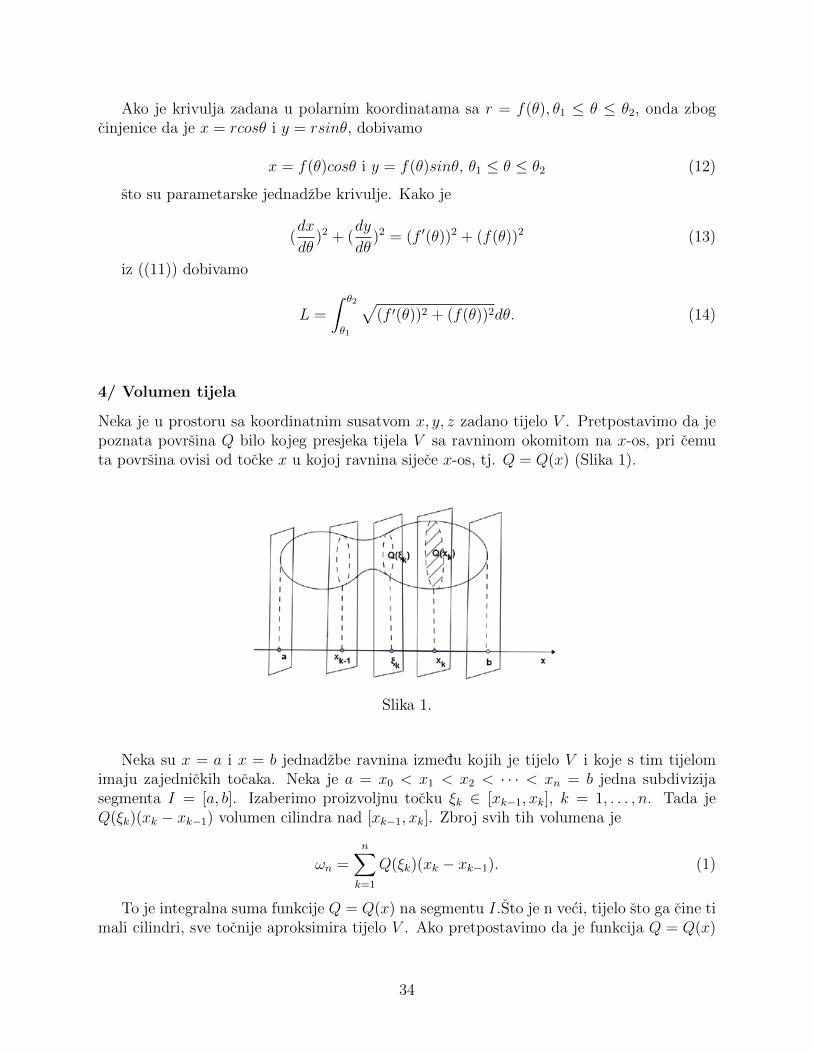
Neka je u prostoru sa koordinatnim susatvom x, y, z zadano tijelo V . Pretpostavimo da jepoznata povrsina Q bilo kojeg presjeka tijela V sa ravninom okomitom na x-os, pri cemuta povrsina ovisi od tocke x u kojoj ravnina sijece x-os, tj. Q = Q(x) (Slika 1).
Slika 1.
Neka su x = a i x = b jednadzbe ravnina izmedu kojih je tijelo V i koje s tim tijelomimaju zajednickih tocaka. Neka je a = x0 < x1 < x2 < · · · < xn = b jedna subdivizijasegmenta I = [a, b]. Izaberimo proizvoljnu tocku ξk ∈ [xk−1, xk], k = 1, . . . , n. Tada jeQ(ξk)(xk − xk−1) volumen cilindra nad [xk−1, xk]. Zbroj svih tih volumena je
ωn =n∑k=1
Q(ξk)(xk − xk−1). (1)
To je integralna suma funkcije Q = Q(x) na segmentu I.Sto je n veci, tijelo sto ga cine timali cilindri, sve tocnije aproksimira tijelo V . Ako pretpostavimo da je funkcija Q = Q(x)
34
neprekidna na I, tada je ona i integrabilna na I i vrijedi
µ(V ) =
∫ b
a
Q(x)dx, (2)
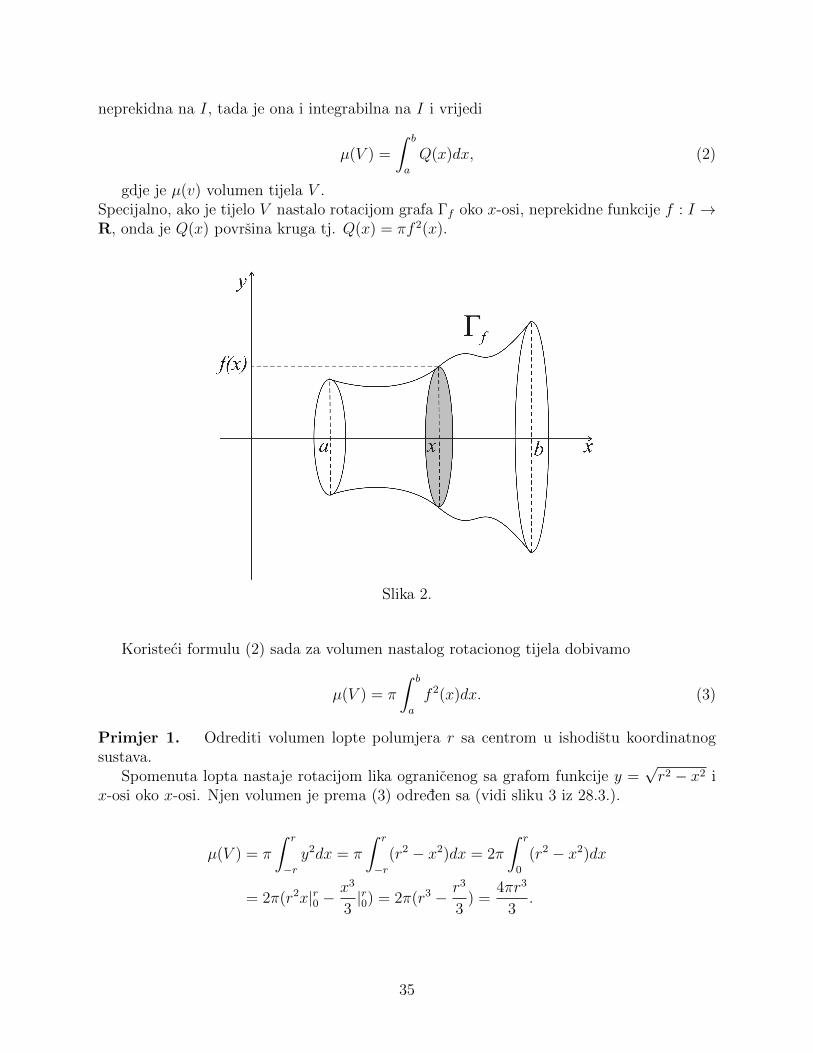
gdje je µ(v) volumen tijela V .Specijalno, ako je tijelo V nastalo rotacijom grafa Γf oko x-osi, neprekidne funkcije f : I →R, onda je Q(x) povrsina kruga tj. Q(x) = πf 2(x).
Slika 2.
Koristeci formulu (2) sada za volumen nastalog rotacionog tijela dobivamo
µ(V ) = π
∫ b
a
f 2(x)dx. (3)
Primjer 1. Odrediti volumen lopte polumjera r sa centrom u ishodistu koordinatnogsustava.
Spomenuta lopta nastaje rotacijom lika ogranicenog sa grafom funkcije y =√r2 − x2 i
x-osi oko x-osi. Njen volumen je prema (3) odreden sa (vidi sliku 3 iz 28.3.).
µ(V ) = π
∫ r
−ry2dx = π
∫ r
−r(r2 − x2)dx = 2π
∫ r
0
(r2 − x2)dx
= 2π(r2x|r0 −x3
3|r0) = 2π(r3 − r3
3) =
4πr3
3.
35
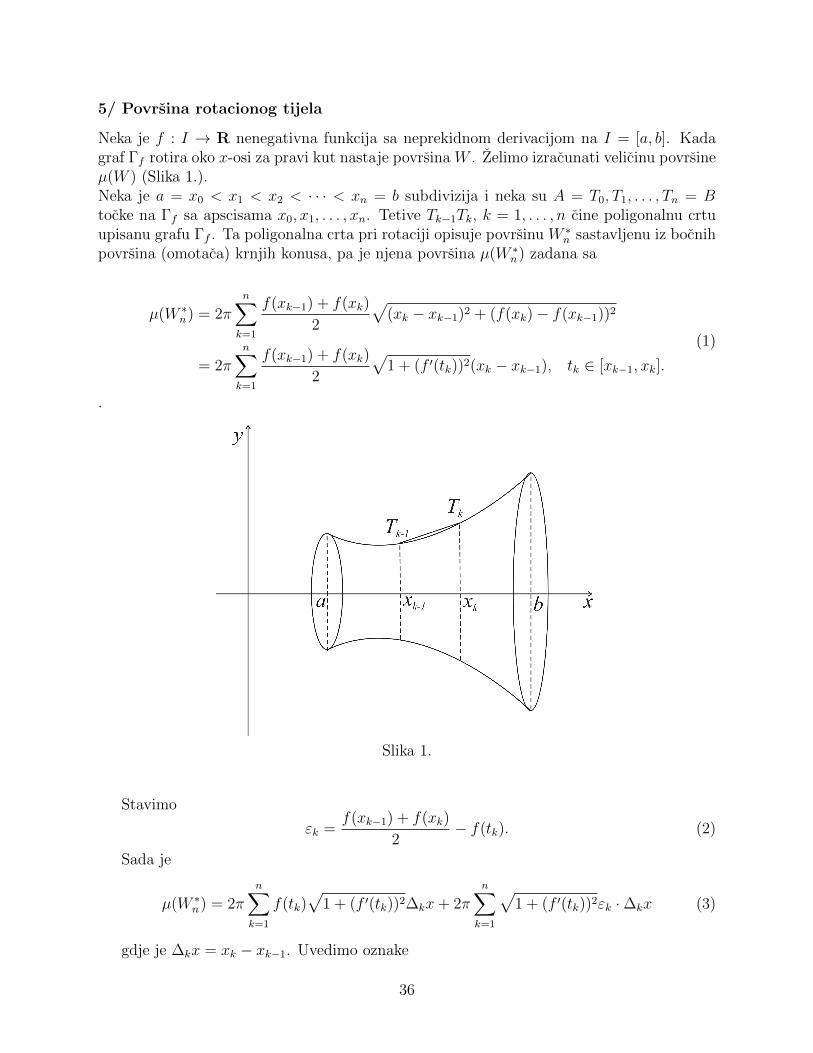
5/ Povrsina rotacionog tijela
Neka je f : I → R nenegativna funkcija sa neprekidnom derivacijom na I = [a, b]. Kadagraf Γf rotira oko x-osi za pravi kut nastaje povrsina W . Zelimo izracunati velicinu povrsineµ(W ) (Slika 1.).Neka je a = x0 < x1 < x2 < · · · < xn = b subdivizija i neka su A = T0, T1, . . . , Tn = Btocke na Γf sa apscisama x0, x1, . . . , xn. Tetive Tk−1Tk, k = 1, . . . , n cine poligonalnu crtuupisanu grafu Γf . Ta poligonalna crta pri rotaciji opisuje povrsinu W ∗
n sastavljenu iz bocnihpovrsina (omotaca) krnjih konusa, pa je njena povrsina µ(W ∗
n) zadana sa
µ(W ∗n) = 2π
n∑k=1
f(xk−1) + f(xk)
2
√(xk − xk−1)2 + (f(xk)− f(xk−1))2
= 2πn∑k=1
f(xk−1) + f(xk)
2
√1 + (f ′(tk))2(xk − xk−1), tk ∈ [xk−1, xk].
(1)
.
Slika 1.
Stavimo
εk =f(xk−1) + f(xk)
2− f(tk). (2)
Sada je
µ(W ∗n) = 2π
n∑k=1
f(tk)√
1 + (f ′(tk))2∆kx+ 2πn∑k=1
√1 + (f ′(tk))2εk ·∆kx (3)
gdje je ∆kx = xk − xk−1. Uvedimo oznake
36

Sn = 2πn∑k=1
f(tk) ·√
1 + (f ′(tk))2 ·∆k, (4)
Rn = 2πn∑k=1
√1 + (f ′(tk))2 · εk ·∆kx. (5)
Iz (2) lako zakljucujemo da (zbog uniformne neprekidnosti funkcije f na [a, b]) za n→∞imamo εk →∞ pa uz cinjenicu da vrijedi√
1 + (f ′(tk))2 ≤√
1 +M2, (6)
gdje je M = maxa<x<b
|f ′(x)|, iz (5) dobivamo da za n→∞ vrijedi da Rn → 0. Jasno je da
je Sn intergralna suma funkcije 2πf(x)√
1 + (f ′(x))2 tj. Sn → 2π∫ baf(x)
√1 + (f ′(x))2dx,
kada n→∞. Dakle µ(W ∗n)→ µ(W ) za n→∞ i zakljucujemo da je
µ(W ) = 2π
∫ b
a
f(x)√
1 + (f ′(x))2dx. (7)
.
37

3 NUMERICKI REDOVI
3.1 Konvergencija numerickog reda i osnovna svojstva
Proizvoljan realni niz (an) generira novi niz (Sn) gdje je
S1 = a1,
S2 = a1 + a2,
S3 = a1 + a2 + a3,
. . .
Sn = a1 + a2 + · · ·+ an,
. . .
tj. Sn =n∑k=1
ak. Sume Sn, za n→∞, sugeriraju izraz
∞∑k=1
ak = a1 + a2 + a3 + · · · , (1)
gdje su brojevi ak (k ∈ N) samo formalno vezani znakom +, jer nije moguce zbrojiti be-skonacno mnogo brojeva. Izraz (1) se zove numericki red. Brojevi ak se zovu clanovimareda, a sume Sn se zovu parcijalne sume reda. Kada postoji lim
n→∞Sn = S ∈ R, kazemo da
red (1) konvergira i da je S suma reda. Tada pisemo
n∑k=1
ak = S. (2)
Treba uociti da S nije suma dobivena zbrajanjem vec da je S limes niza suma dobivenihzbrajanjem.Ako niz (Sn) divergira, kazemo da red (1) divergira.Iz definicije konvergencije reda slijedi sljedeci zakljucak. Niz (Sn) konvergira ka S ako
(∀ε > 0)(∃n0 ∈ N) t.d. (∀n ∈ N)(n > n0) =⇒ |Sn − S| <ε
2. (3)
Sada za sve m,n ∈ N za koje je m ≥ n > n0 imamo
|Sm − Sn| = |(Sm − S) + (S − Sn)| ≤ |Sm − S|+ |Sn − S| <ε
2+ε
2. (4)
Dakle,
|Sm − Sn| = |m∑n+1
ak| ≤ ε. (5)
Odavdje za m = n+ 1 dobijemo
(n > n0) =⇒ (|an+1| < ε), (6)
38

tj. zakljucujemo da ako red konvergira vrijedi
an+1 → 0 (n→∞). (7)
Time smo dokazali sljedeci teorem.
Teorem 1 (Nuzan uvjet za konvergenciju reda). Ako red (1) konvergira,tada
ak → 0 za (k →∞). (8)
Red∞∑
k=n+1
ak naziva se n-ti ostatak reda (1), a njegova suma, ako postoji, oznacava se
sa rn.
Definicija 1. Kazemo da red∞∑k=1
ak apsolutna konvergira ako red∞∑k=1
|ak| konvergira.
Primjer 1. Red∞∑k=1
(−1
2
)kapsolutno konvergira, jer geometrijski red
∞∑k=1
∣∣∣∣−1
2
∣∣∣∣2 =∞∑k=1
1
2kkonvergira.
Teorem 2. Ako red∑∞
k=1 apsolutno konvergira, onda on konvergira. Njegova suma jejednaka zbroju njegovih pozitivnih i njegovih negativnih clanova.
Dokaz. Oznacimo un (sa vn) n-tu parcijalnu sumu reda pozitivnih (negativnih) clanova reda.Tada su nizovi (un) i (vn) monotoni, a iz
|un| <∞∑k=1
|ak|, |vn| <∞∑k=1
|ak|, (9)
slijedi da su ti nizovi ograniceni. Prema teoremu o konvergenciji monotonih nizova, ti nizovisu konvergenti, tj. postoje u, v ∈ R takvi da je
limn→∞
un = u, limn→∞
vn = v. (10)
Dakle u odnosno v po definiciji su sume reda pozitivnih odnosno negativnih clanova. Takoderje
Sn = un + vn. (11)
Na kraju zakljucujemo da vrijedi
limn→∞
Sn = limn→∞
un + limn→∞
vn = u+ v, (12)
pa je S = u+ v. Time je teorem dokazan.
39

3.2 Kriterij za konvergenciju redova
Teorem 1. Neka su∞∑k=1
ak i∞∑k=1
bk redovi sa nenegativnim clanovima. Ako za neki k0 ∈ N
vrijedi(k > k0) =⇒ (ak ≤ bk) (1)
tada konvergencija reda∞∑k=1
bk povlaci konvergenciju reda∞∑k=1
ak, a divergencija reda∞∑k=1
ak
povlaci divergenciju reda∞∑k=1
bk.
Dokaz. Primjetimo da su nizovi
Sn =n∑k=1
ak, hn =n∑k=1
bk (2)
monotono rastuci, pa za n > k0, imamo
Sn =
k0∑k=1
ak +n∑
k=k0+1
ak ≤k0∑k=1
ak +n∑
k=k0+1
bk ≤k0∑k=1
ak +n∑k=1
bk (3)
ili
Sn ≤ λ+ hn, λ =
k0∑k=1
ak ∈ R. (4)
Kako je sada zadovoljena nejednakost (4) to za rastuci niz (Sn) zakljucujemo da je
odozgo ogranicen pa i konvergentan. Odavdje slijedi da divergencija reda∞∑k=1
ak povlaci
divergenciju reda∞∑k=1
bk, jer pretpostavka da∞∑k=1
bk konvergira povlaci konvergenciju reda
∞∑k=1
ak, tj. vodi na kontradikciju.
Teorem 2. Neka su zadani redovi
∞∑k=1
ak, (ak ≥ 0) i∞∑k=1
bk, (bk > 0) (5)
i neka je
limn→∞
akbk
= c. (6)
Tada
40

(i) za 0 ≤ c <∞, konvergencija reda∞∑k=1
bk povlaci konvergenciju reda∞∑k=1
ak;
(ii) za 0 < c ≤ ∞ divergencija reda∞∑k=1
bk povlaci divergenciju reda∞∑k=1
ak.
Dokaz. Dokazimo (i). Neka je 0 ≤ c <∞. Tada postoji k0 ∈ N takav da je
akbk< c+ 1 za k > k0. (7)
Ako∞∑k=1
bk konvergira tada red∞∑k=1
(c + 1)bk konvergira, sto prema Teoremu 1 dovodi do
zakljucka da i red∞∑k=1
ak konvengira (jer je ak < (c + 1)bk, za k > k0). Tvrdnja (ii) se
dokazuje analogno.
Teorem 3 (D’Alambertov kriterij). Neka je ak 6= 0 (k = 1, 2, ...). Ako vrijedi
(i) limn→∞
∣∣∣∣ak+1
ak
∣∣∣∣ = q < 1, redn∑k=1
ak apsolutno konvergira;∞∑k=1
ak;
(ii) limn→∞
∣∣∣∣ak+1
ak
∣∣∣∣ = q > 1, redn∑k=1
ak divergira.∞∑k=1
ak.
Dokaz. Dokazimo (i). Odaberimo r ∈ R takav da je q < r < 1. Tada postoji k0 ∈ N takavda je
|ak+1
ak| ≤ r za sve k > k0. (8)
Slijedi|ak0+1| ≤ r|ak0 |, |ak0+2| ≤ r|ak0+1| ≤ r2|ak0|, (9)
odnosno|ak0+m| ≤ rm|ak0|. (10)
Koristeci (10) zakljucujemo da vrijedi
∞∑m=1
|ak0+m| ≤ |ak0|∞∑m=1
rm. (11)
Kako je 0 < r < 1, po Teoremu 1 red∞∑m=1
|ak0+m| konvengira pa i red∞∑m=1
ak0+m konvengira
apsolutno. Dokazimo (ii). Kako vrijedi limk→∞|ak+1
ak| > 1 zakljucujemo da postoji k0 ∈ N
takav da za k > k0 vrijedi ∣∣∣∣ak+1
ak
∣∣∣∣ > 1 ili |ak+1| > |ak|. (12)
41

Iz (12) zakljucujemo da je niz (|ak|), k > k0, monotono rastuci sa pozitivnim clanovima pa
(ak) ne moze konvengirati ka nuli. Nije ispunjen nuzan uvjet za konvergenciju reda∞∑k=1
ak,
pa on divergira.
Primjer 1. Ispitati konvergenciju reda∞∑k=1
k3
k!.
Primijenimo D’Alambertov kriterij i imamo
limk→∞
(k+1)3
(k+1)!
k3
k!
= limk→∞
(k + 1)2
k3= lim
k→∞
[(k + 1
k
)2
· 1
k
]= 0.
Dakle gornji red je konvergentan.
Teorem 4 (Cauchy-ev kriterij).
(i) Ako je limk→∞
k√|ak| = q < 1 onda red
∞∑k=1
ak apsolutno konvergira.
(ii) Ako je limk→∞
k√|ak| = q > 1 onda red
∞∑k=1
ak divergira.
Dokaz. Dokazimo (i). Odaberimo r tako da vrijedi q < r < 1.Tada postoji k0 ∈ N takav da je
k√|ak| ≤ r za k > k0. (13)
Slijedi|ak| ≤ rk za k > k0. (14)
Kako∞∑
k=k0+1
rk konvergira, jer je |r| < 1, onda prema Teoremu 1 zakljucujemo da i red
∞∑k=k0+1
k√|ak| konvergira. Dokazimo (ii). Ako je lim
k→∞k√|ak| > 1 tada je k
√|ak| > 1, za sve k
vece od nekog k0, pa je i |ak| > 1 za k > k0, sto znaci da (ak) ne konvergira ka nuli. Zbog
toga∞∑k=1
ak divergira.
Primjer 2. Red∞∑k=1
k4
2kkonvergira jer je
limk→∞
k
√k4
2k= lim
k→∞
( k√k)4
2=
1
2< 1.
42

Ako je limn→∞
|ak+1
ak| = 1 ili lim
k→∞k√|ak| = 1 onda Cauchy-ev i D’Alambert-ov kriterij ne daje
odgovor na pitanje o konvergenciji reda∞∑k=1
ak, kao sto pokazuju redovi∞∑k=1
1
k,
∞∑k=1
1
k2.
Primjer 3. Ispitati konvergenciju sljedecih redova.
1/∞∑n=1
1
n(n+ 1)=
1
1 · 2+
1
2 · 3+ · · ·+ 1
n(n+ 1)+ · · ·
Vrijedi1
n(n+ 1)=
1
n− 1
n− 1. (15)
Za parcijalnu sumu Sn imamo
Sn =1
1 · 2+
1
2 · 3+
1
3 · 4+ · · ·+ 1
n(n+ 1),
sto primjenom (15) postaje
Sn = (1− 1
2) + (
1
2− 1
3) + · · ·+ (
1
n− 1
n− 1) = 1− 1
n+ 1.
Kako je
limn→∞
Sn = limn→∞
(1− 1
n+ 1) = 1
to gornji red konvergira i vrijedi
∞∑n=1
1
n(n+ 1)= 1.
2/ Red∞∑n=1
= 1 +1
2+ · · ·+ 1
n+ · · · se zove harmonijski.
Imamo
Sn+1 = Sn +1
n+ 1
sto znaci da je niz parcijalnih suma rastuci. Tvrdimo da podniz (S2n) niza Sn divergiraka +∞. Kako je 1
k+1< 1
kza svako k ∈ N, nalazimo
S1 = 1, S2 = 1 +1
2, S4 = 1 +
1
2+
(1
3+
1
4
)> 1 +
1
2+ (
1
4+
1
4) = 1 + 2 · 1
2,
S23 = S8 = S4 +1
5+
1
6+
1
7+
1
8> S4 +
1
8+
1
8+
1
8+
1
8= S4 +
1
2> 1 + 3 · 1
2.
Analogno zakljucujemo da je
S2n > 1 + n · 1
2.
Dakle podniz (S2n) strogo rastuceg niza (Sn) divergira ka +∞, pa i niz (Sn) divergira.
43

3/ Red∞∑n=1
1
n2je konvergentan buduci da vrijedi
1
(n+ 1)2<
1
n(n+ 1).
Primjenimo Teorem 1. i zakljucujemo, kako red∞∑n=1
1
n(n+ 1)konvergira (vidi 1/ red
u ovom primjeru) onda ce konvergirati i red∞∑n=1
1
n2.
4/ Red∞∑n=1
1
npkonvergira za p ≥ 2 jer je 1
np≤ 1
n2 i jer redn→∞∑n=1
1
n2konvergira.
5/ Moze se dokazati da tzv. hiperharmonijski red∞∑n=1
1
npdivergira za p ≤ 1 jer je tada
1np≥ 1
npa divergencija reda
∞∑n=1
1
npovlaci divergenciju reda
∞∑n=1
1
np.
Naime vrijedi∞∑n=1
1
np=
{konvergira za p > 1,
divergira za p ≤ 1.(16)
Definicija 1. Red∞∑k=1
ak je uvjetno konvergentan ako je∞∑k=1
ak konvergentan, a red∞∑k=1
|ak|
divergentan.
Teorem 5 (Leibnitz-ov kriterij). Ako je (ak), ak > 0 opadajuci nula niz, tada je konvergen-tan alternirani red
a1 − a2 + a3 − · · ·+ (−1)n+1an + · · · =∞∑n=1
(−1)n+1an (17)
i za njegovu sumu S i njegov n-ti ostatak rn vrijedi
0 < s < a1 i |rn| < an+1. (18)
Dokaz. Iz
S2n+2 = S2n + a2n+1 − a2n+2 ≥ S2n, (19)
S2n+1 = S2n−1 − a2n + a2n+1 ≤ S2n−1, (20)
vidimo da niz (S2n) monotono raste i da (S2n−1) monotono opada. Takoder, iz
S2 ≤ S2n = S2n−1 − a2n < S2n−1 ≤ S1 (21)
44

vidimo da je (S2n) ogranicen odozgo sa S1 i da je (S2n−1) ogranicen odozdo sa S2 pa su obaova niza konvergentna. Dakako, postoje lim
n→∞S2n i lim
n→∞S2n−1 u R. Zato imamo da vrijedi
limn→∞
S2n−1 − limn→∞
S2n = − limn→∞
a2n = 0 (22)
i zakljucujemo da jelimn→∞
S2n−1 = limn→∞
S2n(= S) (23)
pa niz (Sn) konvergira ka S, sto znaci da je
∞∑k=1
(−1)k+1ak = S. (24)
Iz S2n < S < S2n−1 (n ∈ N) slijedi
0 < S2 < S < S1 = a1 , tj. 0 < s < a1. (25)
Preostaje ocijeniti n-ti ostatak rn. Iz (−1)nrn = an+1 − an+2 + . . . zakljucujemo da je
|(−1)nrn| = |rn| < an+1. (26)
Primjer 4. Alternirani red∞∑n=1
(−1)n
npo Leibniz-ovom kriteriju konvergira, buduci da su
ispunjeni uvjeti Teorema 5. tj. vrijedi
1
n≥ 1
n+ 1,
limn→∞
1
n= 0.
45

4 NIZOVI I REDOVI FUNKCIJA
4.1 Konvergencija niza funkcija i osnovna svojstva
Analogno definiciji numerickog niza, definiramo niz funkcija.
Definicija 1. Nizom funkcija iz R u R nazivamo svako preslikavanje skupa N u skup realnihfunkcija.
Niz funkcija oznacavamo sa (fn). Za svako pojedino x ∈⋂n∈N
D(fn) dobivamo brojni niz
(fn(x)). Ako (fn(x)) konvergira, kazemo da niz funkcija (fn) konvergira u tocki x. Neka(fn(x)) konvergira za svako x iz nekog skupa E i stavimo
f(x) = limn→∞
fn(x), x ∈ E. (1)
Tada kazemo da niz funkcija (fn) konvergira tocka po tocka ka funkciji f na E, ilijednostavno da niz (fn) konvergira ka f na E.
Primjer 1. Niz (fn), ciji je opci clan fn(x) = xn konvergira ka nuli na 〈−1, 1〉, tj.
limn→∞
fn(x) = limn→∞
xn = 0, ∀x ∈ 〈−1, 1〉 .
Niz (fn) sa istim opcim clanom fn(x) = xn takoder konvergira na 〈−1, 1] ali sada to jekonvergencija ka funkciji f definiranoj sa
f(x) =
{0, −1 < x < 1
1, x = 1.
Gornju definiciju konvergencije mozemo i ovako parafrazirati.
Definicija 2. Kazemo da niz funkcija (fn) konvergira ka funkciji f na skupu E, ako zasvako ε > 0 i svako x ∈ E postoji n0 ∈ N koji ovisi od x i ε takav da vrijedi
(n > n0)⇒ |fn(x)− f(x)| < ε. (2)
U ovoj definiciji bitno je da n0 ovisi ne samo od ε nego i od x. Specijalni slucaj je kadan0 ne ovisi od x. Tada govorimo o uniformnoj (ravnomjernoj) konvergenciji niza (fn) ka fna E. Preciznije definirajmo uniformnu konvergenciju.
Definicija 3. Niz funkcija (fn) konvergira uniformno ka funkciji f na E, ako za svakoε > 0 postoji n0 ∈ N takav da za sve x ∈ E vrijedi
(n > n0)⇒ |fn(x)− f(x)| < ε. (3)
46

Ocigledno, uniformna konvergencija niza (fn) ka funkciji f na E povlaci (obicnu) ko-nvergenciju niza (fn) ka f na E. Obrat ne vrijedi.
Teorem 1. Ako niz (fn) funkcija definiranih na skupu E konvergira uniformno ka funkcijif na E i ako su funkcije (fn) (n = 1, 2, ...) neprekidne na E, tada je f neprekidna na E.
Dokaz. Neka su x0 ∈ E i ε > 0 proizvoljni. Treba pokazati da postoji δ takav da
x ∈ 〈x0 − δ, x0 + δ〉 ⇒ |f(x)− f(x0| < ε. (4)
Kako (fn) uniformno konvergira ka f na E, za neko n ∈ N i sve x ∈ E imamo
|fn(x)− f(x)| < ε
3, (5)
a (fn) je neprekidna funkcija u tocki x0 pa postoji δ > 0 takav da
x ∈ 〈x0 − δ, x0 + δ〉 ⇒ |fn(x)− fn(x0)| < ε
3. (6)
Sada za sve x ∈ 〈x0 − δ, x0 + δ〉 i odabrano n imamo
|f(x)− f(x0)| ≤ |f(x)− fn(x)|+ |fn(x)− fn(x0|+ |fn(x0)− f(x0)| < ε
3+ε
3+ε
3= ε (7)
pa je f neprekidna u tocki x0, a time i na skupu E jer je x0 ∈ E proizvoljno.
4.2 Konvergencija reda funkcija i osnovna svojstva reda
Analogno numerickom redu, definiramo red funkcija (funkcijski red). Neka je (fn) niz funk-cija sa E u R (E ⊆ R) . Stavimo
Sn = f1 + f2 + · · ·+ fn, n ∈ N. (1)
Suma Sn, pri n→∞, sugerira izraz∞∑k=1
fk = f1 + f2 + . . . (2)
koji se zove red funkcija ili funkcijski red na skupu E. Funkcije fk, k = 1, 2, . . . , odnosnoSn, n = 1, 2, . . . , zovu se clanovi reda, odnosno parcijalne sume reda. Ako niz (Sn) funkcijakonvergira tocka po tocka ka funkciji f na skupu E, tada kazemo da red
∑∞k=1 fk konvergira
tocka po tocka ka funkciji f na skupu E ili jednostavno da red∑∞
k=1 fk konvergira ka f naE. Kaze se jos da je f suma reda
∑∞k=1 fk na skupu E i pise
∞∑k=1
fk = f. (3)
Ako niz (Sn) konvergira uniformno ka funkciji f na skupu E, tada kazemo da red∑∞
k=1 fkuniformno konvergira ka f na E. Umjesto
∑∞k=1 fk cesto pisemo
∑∞k=1 fk(x). Suglasno tome∑∞
k=1 fk = f pisemo∞∑k=1
fk(x) = f(x). (4)
47

Teorem 1 (Weierstrass-ov teorem). Ako red∑∞
k=1 ak konvergira i ako je |fk(x)| ≤ ak zasve x ∈ E i za dovoljno velike k, tada red
∑∞k=1 fk konvergira apsolutno i uniformno na E.
Dokaz. Prema teoremu o usporedivanju redova, red∑∞
k=1 fk(x) apsolutno konvergira zasvako pojedino x ∈ E. Neka je
f(x) =∞∑k=1
fk(x), Sn(x) =n∑k=1
fk(x), A =∞∑k=1
ak, τn =n∑k=1
ak. (5)
Ako je |fk(x)| ≤ ak, za k > n1 i sve x ∈ E, tada za sve m,n ∈ N(m > n > n1) i za svex ∈ E imamo ∣∣∣∣∣
m∑k=n+1
fk(x)
∣∣∣∣∣ ≤m∑
k=n+1
|fk(x)| ≤m∑
k=n+1
ak = τm − τn. (6)
Odavde, pri m→∞, za sve x ∈ E imamo
|f(x)− Sn(x)| < A− τn −→ 0, (n→∞). (7)
To znaci da za svako ε > 0 postoji n0 ∈ N takav da za sve x ∈ E vrijedi
(n > n0) =⇒ |f(x)− Sn(x)| < ε, (8)
sto znaci da red∑∞
k=1 fk uniformno konvergira na E.
Teorem 2. Ako red∑∞
k=1 fk konvergira uniformno ka funkciji f na skupu E i ako su fkneprekidne funckije na E, tada je f neprekidna na E.
Dokaz. Tvrdnja direktno slijedi iz definicije uniformne konvergencije reda i teorema kojigovori o nizu neprekidnih funkcija koji uniformno konvergira ka neprekidnoj funkciji.
Primjer 1. Ispitati konvergenciju reda
∞∑n=1
sinnx
n2, x ∈ R.
Kako za svako n ∈ N i svako x ∈ R vrijedi∣∣∣∣sinnxn2
∣∣∣∣ ≤ 1
n2
i kako red∑∞
n=11n2 konvergira prema Teoremu 1. zakljucujemo da polazni red konvergira
apsolutno i uniformno na R.
48

4.3 Taylor-ova formula
Neka funkcija f : I → R ima n-tu derivaciju fn na intervalu I = 〈a, b〉. Za c ∈ I funkcija fgenerira polinom
Tn(x) = f(c) +f ′(c)
1!(x− c) +
f ′′(c)
2!(x− c)2 + · · ·+ fn(c)
n!(x− c)n, (1)
n-tog stupnja koji se zove Tayor-ov polinom funkcije f . On ocigledno zadovoljava uvjete
Tn(c) = f(c), T (k)n (c) = f (k)(c), k = 1, 2, . . . (2)
pa je taj polinom ”blizak” funkciji f .
Teorem 1 (Taylor-ov teorem). Neka za neko n ∈ N funkcija f : I → R ima neprekidnuderivaciju f (n+1) na I = 〈a, b〉. Tada za svake dvije tocke c, x ∈ I (c-fiksno) postoji tockaξ = ξ(x) izmedu c i x takva da je
f(x) =n∑k=0
fk(c)
k!(x− c)k +
fn+1(ξ)
(n+ 1)!(x− c)n+1. (3)
Dokaz. Prema (1) jednakost (3) mozemo pisati u obliku
f(x) = Tn(x) +f (n+1)(ξ)
(n+ 1)!(x− c)n+1. (4)
Neka je λ (koja ovisi o x) odredena jednadzbom
f(x) = Tn(x) + λ(x− c)n+1 (5)
i neka je
g(t) = f(t)− Tn(t)− λ(t− c)n+1, t ∈ I. (6)
Treba dokazati da je
(n+ 1)!λ = f (n+1)(ξ) (7)
za neko ξ izmedu c i x. Zaista prema (5) i (6) je
g(n+1)(t) = f (n+1)(t)− (n+ 1)!λ, t ∈ I, (8)
pa ce dokaz biti zavrsen ako pokazemo da je g(n+1)(ξ) = 0 za neko ξ izmedu c i x. Kako je
T (k)n (c) = f (k)(c), k = 1, . . . n, Tn(c) = f(c), (9)
imamog(c) = g′(c) = g′′(c) = · · · = g(n)(c) = 0. (10)
Broj λ je izabran tako da bude g(x) = 0. Sada (prema Lagrange-ovom teoremu srednjevrijednosti) imamo g′(ξ1) = 0 za neko ξ1 izmedu c i x. Na slican nacin zakljucujemo da jeg′′(ξ2) = 0 za neko ξ2 izmedu c i ξ1. Poslije n + 1 koraka dobit cemo da je gn+1(ξn+1) = 0za neko ξn+1 izmedu c i x, tj. ξn+1 = ξ je takva da g(n+1)(ξ) = ξ.
49

Formula (3) zove se Taylor-va formula funkcije f u okolini tocke c, a izraz
rn(x) =f (n+1)(ξ)
(n+ 1)!(x− c)n+1 (11)
se zove n-ti ostatak (u Lagrange-ovom obliku) Taylor-ove formule.Stavimo θ = ξ−c
x−c , tj. ξ = c+ θ(x− c), gdje je 0 < θ < 1. Tada n-ti ostatak (11) mozemopisati u obliku
rn(x) =f (n+1)(c+ θ(x− c))
(n+ 1)!(x− c)n+1, 0 < θ < 1. (12)
Pretpostavimo da interval I iz Teorema 1. sadrzi nulu i u (3) stavimo c = 0. Tadadobivamo Mac Laurin-ovu formulu za funkciju f u okolini tocke c = 0 i imamo
f(x) =n∑k=0
f (k)(0)
k!xk + rn(x), (13)
gdje je
rn(x) =f (n+1)(ξ)
(n+ 1)!xn+1 ili rn(x) =
f (n+1)(θx)
(n+ 1)!xn+1, 0 < θ < 1. (14)
Kako je rn(c) = r(k)n (c) = 0, (k = 1, . . . , n) uzastopnom primjenom L’Hospital-ovog pravila
dobivamo
limx→c
rn(x)
(x− c)n= lim
x→c
r′n(x)
n(x− c)n−1= · · · = lim
x→c
r(n)n (x)
n!= 0, (15)
sto dajern(x) = O((x− c)n). (16)
Ovo je Pean-ov oblik Taylor-ovog ostatka. Sada se vidi da je Taylor-ov ostatak be-skonacno mali viseg reda u odnosu na (x− c)k, k = 1, 2, . . . n, pri x→ c, a time i u odnosuna clanove Taylor-ovog polinoma (1) kao beskonacno male pri x → c. Sada (3) mozemopisati u obliku
f(x) =n∑k=0
f (k)(c)
k!(x− c)k +O((x− c)n) (17)
sto pokazuje da funkciju f mozemo aproksimirati njenim Taylor-ovim polinomom u okolinitocke c s tocnoscu do beskonacno male viseg reda u odnosu na bilo koji clan tog polinomakao beskonacno malu pri x → c. Velicina greske pri toj aproksimaciji data je ostatkomrn(x) = O((x− c)n).
Navedimo nekoliko primjera razvoja funkcija po Taylor-ovoj formuli u okolini tocke 0.
Primjer 1. Uzimajuci u obzir da za funkciju f(x) = ex vrijedi f (k)(0) = 1, za sve k ∈ N,imamo
ex = 1 +x
1!+x2
2!+ · · ·+ xn
n!+ rn(x), x ∈ R, (18)
50
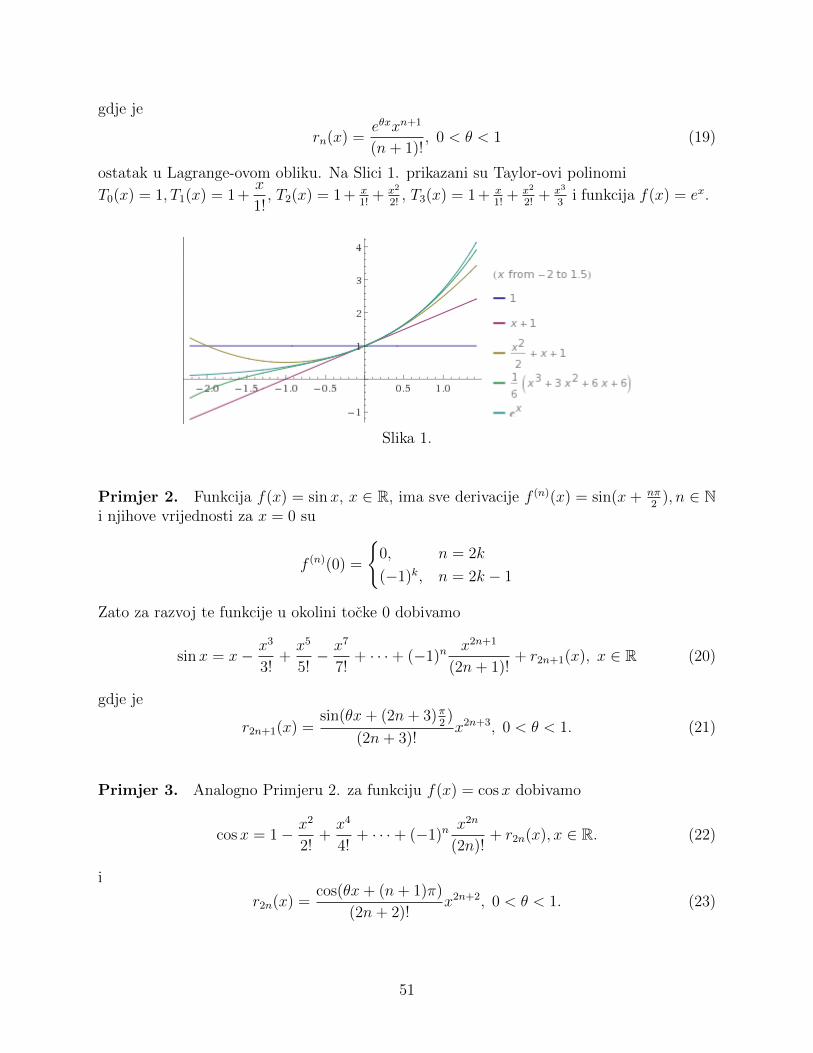
gdje je
rn(x) =eθxxn+1
(n+ 1)!, 0 < θ < 1 (19)
ostatak u Lagrange-ovom obliku. Na Slici 1. prikazani su Taylor-ovi polinomi
T0(x) = 1, T1(x) = 1 +x
1!, T2(x) = 1 + x
1!+ x2
2!, T3(x) = 1 + x
1!+ x2
2!+ x3
3i funkcija f(x) = ex.
Slika 1.
Primjer 2. Funkcija f(x) = sinx, x ∈ R, ima sve derivacije f (n)(x) = sin(x+ nπ2
), n ∈ Ni njihove vrijednosti za x = 0 su
f (n)(0) =
{0, n = 2k
(−1)k, n = 2k − 1
Zato za razvoj te funkcije u okolini tocke 0 dobivamo
sinx = x− x3
3!+x5
5!− x7
7!+ · · ·+ (−1)n
x2n+1
(2n+ 1)!+ r2n+1(x), x ∈ R (20)
gdje je
r2n+1(x) =sin(θx+ (2n+ 3)π
2)
(2n+ 3)!x2n+3, 0 < θ < 1. (21)
Primjer 3. Analogno Primjeru 2. za funkciju f(x) = cos x dobivamo
cosx = 1− x2
2!+x4
4!+ · · ·+ (−1)n
x2n
(2n)!+ r2n(x), x ∈ R. (22)
i
r2n(x) =cos(θx+ (n+ 1)π)
(2n+ 2)!x2n+2, 0 < θ < 1. (23)
51

Primjer 4. Koristeci razvoje
ex =1 +x
1!+x2
2!+x3
3!+ · · ·+ xn
n!+ rn(x),
e−x =1− x
1!+x2
2!− x3
3!+ · · ·+ (−1)n
xn
n!+ rn(x),
i njihovim oduzimanjem i zbrajanjem dobivamo slijedece razvoje za sve x ∈ R i sve n =0, 1, 2 . . .
shx =n∑k=0
x2k+1
(2k + 1)!+ r2n+1(x), (24)
chx =n∑k=0
x2k
(2k)!+ r2n(x). (25)
4.4 Taylor-ovi redovi
Ako funkcija f ima derivaciju bilo kojeg reda u nekom intervalu I koji sadrzi tocku c tadase red
∞∑k=0
f (k)(c)
k!(x− c)k, x ∈ I (1)
zove Taylor-ov red funkcije f u tocki c. Od ranije imamo Taylor-ovu formulu
f(x) =n∑k=0
f (k)(c)
k!(x− c)k + rn(x), (2)
gdje je
rn(x) =f (n+1)(ξ)
(n+ 1)!(x− c)n+1, (3)
za neko ξ izmedu x i c. Sada vidimo da Taylor-ov red funkcije f konvergira ka f na I ako isamo ako rn → 0 (n→∞) na I. U tom slucaju je
f(x) =∞∑k=0
f (k)(c)
k!(x− c)k, x ∈ I (4)
i kazemo da smo funkciju f razvili u Taylor-ov red oko tocke c, odnosno na nekom intervalukoji sadrzi c. Ako je 0 ∈ I, onda za c = 0 dobivamo razvoj funkcije f u Mac Laurin-ov redoko tocke c = 0 i tada je
f(x) =∞∑k=0
f (k)(0)
k!xk, x ∈ I. (5)
52

Teorem 1. Neka su funkcija f i sve njene derivacije f (k), k = 1, 2, . . ., ogranicene naintervalu I, tj. neka postoji konstanta M > 0 takva da je
∣∣f (k)(x)∣∣ < M, x ∈ I, k =
0, 1, 2, . . . . Tada je
f(x) =∞∑k=0
f (k)(x0)
k!(x− x0)k, x, x0 ∈ I. (6)
Dokaz. Pomocu D’Alambert-ovog kriterija lako se dokaze da red
∞∑k=0
xk
k!(7)
konvergira za svako x ∈ R, sto povlaci da za sve x ∈ R vrijedi
xk
k!→ 0 (k →∞). (8)
Sada za n-ti Taylor-ov ostatak u Lagrangeovom obliku imamo
|rn(x)| =∣∣∣∣f (n+1)(ξ)
(n+ 1)!(x− x0)n+1
∣∣∣∣ < M|x− x0|n
(n+ 1)!→ 0 (n→∞) (9)
sto je i trebalo dokazati.
Primjer 1. Za funkciju f(x) = ex imamo razvoj u okolini nule
ex = 1 +x
1!+x2
2!+x3
3!+ · · ·+ xn
n!+
eθx
(n+ 1)!xn+1, 0 < θ < 1. (10)
Kako su na [–a, a], a > 0 proizvoljan, funkcija f i sve njene derivacije ogranicene , to premaTeoremu 1. zakljucujemo da ostatak tezi nuli kada n→∞ za svako a > 0. Time dobivamo
ex = 1 +x
1!+x2
2!+x3
3!+ · · ·+ xn
n!+ · · · =
∞∑n=0
xn
n!, ∀x ∈ R. (11)
Analogno dobivamo slijedece konvergentne redove
sinx =x
1!− x3
3!+x5
5!− · · ·+ (−1)n
x2n+1
(2n+ 1)!+ · · · =
∞∑n=0
(−1)nx2n+1
(2n+ 1)!, ∀x ∈ R, (12)
cosx =1− x2
2!+x4
4!− · · ·+ (−1)n
x2n
(2n)!+ · · · =
∞∑n=0
(−1)nx2n
(2n)!, ∀x ∈ R, (13)
ln(1 + x) =x
1− x2
2+x3
3− · · ·+ (−1)n+1x
n
n+ · · · =
∞∑n=1
(−1)n+1xn
n,−1 < x < 1, (14)
(1 + x)α =1 +
(α
1
)x+
(α
2
)x2 + · · ·+
(α
n
)xn + · · · =
∞∑n=0
(α
n
)xn,−1 < x < 1, α ∈ R.
(15)
53

Primjer 2. Zapisati funkciju f(x) =√
1 + 2x u obliku Mac’Laurinovog reda
√1 + 2x = (1 + 2x)1/2 = 1 +
(12
1
)· 2x+
(12
2
)· (2x)2 + · · ·+
(12
n
)· (2x)n + · · · ,−1 < 2x < 1.
Nakon sredivanja imamo red
(1 + 2x)1/2 = 1 + x+1 · (−1)
2!x2 +
1 · (−1) · (−3)
3!x3 + · · ·+ (−1)n−1 1 · 3 · (2n− 3)
n!xn + · · ·
koji konvergira za sve x ∈⟨−1
2, 1
2
⟩.
4.5 Red potencija
Red potencija je funkcionalni red oblika
∞∑k=0
akxk, x ∈ R, (1)
gdje su ak zadani realni brojevi ( koeficijenti reda potencija ).
Primjer 1. Red potencija je red
1 + x+ x2 + · · ·+ xn + · · · .
Neka je
limk→∞
k√|akxk| = lim
k→∞|ak|1/k · |x| = λ. (2)
Prema Cauchy-ovom kriteriju red∞∑k=0
akxk konvergira ako je λ < 1 a divergira za λ > 1.
Slijedi da red potencija konvergira za sve x za koje je |x| < r, a divergira za x za koje je|x| > r, gdje je
r =1
limk→∞ |ak|1/k. (3)
Po definiciji r je nenegativan broj ili +∞ i zove se radijus konvergencije reda potencija. Ako
postoji limk→∞
∣∣∣∣ak+1
ak
∣∣∣∣ , onda postoji i limk→∞|ak|1/k i ta dva limesa su jednaka. U tom slucaju je
r =1
limk→∞ |ak|1/k= lim
k→∞
∣∣∣∣ akak+1
∣∣∣∣ . (4)
Interval 〈−r, r〉 zove se interval konvergencije reda potencija. Postoje redovi potencija kojikonvergiraju i na krajevima intervala konvergencije ili samo u jednom od tih krajeva.
54

Primjer 2. Za red∞∑n=1
xk
nimamo
r = limk→∞
∣∣∣∣ akak+1
∣∣∣∣ = 1
i zakljucujemo da red konvergira za x ∈ 〈−1, 1〉 . Za x = 1 imamo divergentan harmonijski
red∞∑n=1
1
n, a za x = −1 imamo alternirajuci red
∞∑n=1
(−1)n
nkoji je konvergentan.
Teorem 1 (Abel-ov teorem). Ako red potencija∞∑k=0
akxk konvergira u tocki x0 6= 0, tada on
konvergira apsolutno i uniformno na svakom segmentu
[−a, a] ⊂ 〈− |x0| , |x0|〉 . (5)
Dokaz. Neka je x ∈ [−a, a] proizvoljno. Red∞∑k=0
akxk0 konvergira pa je niz (akx
k0) nula niz,
a time je to i ogranicen niz. Dakle postoji konstanta M > 0 takva da je∣∣akxk0∣∣ < M, k = 0, 1, 2, . . . (6)
odavde i izakx
k = akxk0(x
x0
)k (7)
dobivamo ∣∣akxk∣∣ =∣∣akxk0∣∣ · ∣∣∣∣ xx0
∣∣∣∣k < M ·∣∣∣∣ xx0
∣∣∣∣k ≤M ·∣∣∣∣ ax0
∣∣∣∣k . (8)
Kako je 0 < a < |x0|, lako zakljucujemo da geometrijski red∑∞
k=0
∣∣∣ ax0 ∣∣∣k konvergira, a zbog
(8) slijedi apsolutna i uniformna konvergencija reda∞∑k=0
akxk na [−a, a].
Korolar 1. Ako red potencija divergira u tocki x0 6= 0 onda on divergira na skupu R\ [− |x0| , |x0|].
Dokaz. Ako pretpostavimo da red konvergira u nekoj tocki x ∈ R\ [− |x0| , |x0|] , premaprethodnom teoremu dobijemo kontradikciju pa je tvrdnja tocna.
4.6 Deriviranje i integriranje niza i reda funkcija.Svojstva reda potencija
Teorem 1. Ako niz (fn) neprekidnih funkcija na segmentu I = [a, b] uniformno konvergiraka funkciji f na I onda je f integrabilna na I i vrijedi
limn→∞
∫ x
a
fn(t)dt =
∫ x
a
( limn→∞
fn(t))dt =
∫ x
a
f(t)dt (1)
uniformno po x ∈ I.
55

Dokaz. Integrabilnost funkcije f na I slijedi zbog njene neprekidnosti na I (raniji teorem).Dalje, za svako ε > 0 postoji n0 ∈ N takvo da za sve x ∈ I vrijedi
(n > n0)⇒(|fn(x)− f(x)| < ε
b− a
)⇒∣∣∣∣∫ x
a
f(t)dt−∫ x
a
fn(t)dt
∣∣∣∣ ≤∫ x
a
|fn(t)− f(t)| dt < ε
(b− a)(x− a) ≤ ε
(b− a)(b− a) = ε. (2)
Time je tvrdnja dokazana.
Teorem 2. Ako red∑∞
k=1 fk konvergira uniformno na segmentu [a, b] i ako su funkcije fkneprekidne na [a, b], tada za svako fiksno x0 ∈ [a, b] i sve x ∈ [a, b] vrijedi∫ x
x0
(∞∑k=1
fk(t)
)dt =
∞∑k=1
∫ x
x0
fk(t)dt, (3)
pri cemu red na desnoj strani konvergira uniformno po x ka funkciji na lijevoj strani.
Dokaz. Suma f reda∞∑k=1
fk je neprekidna funkcija na [a, b] pa su funkcije fk, k = 1, 2, . . . , i
f integrabilne na [a, b] . Za sve t, x ∈ [a, b] i proizvoljno fiksno x0 ∈ [a, b] stavimo
Sn(t) =n∑k=1
fk(t) i τn(x) =n∑k=1
∫ x
x0
fk(t)dt. (4)
Neka je ε > 0 proizvoljno. Tada postoji n0 ∈ N takav da za sve t ∈ [a, b] vrijedi
(n > n0)⇒ (|f(t)− Sn(t)| < ε
b− a). (5)
Sada za sve n > n0 i sve x ∈ [a, b] imamo∣∣∣∣∫ x
x0
f(t)dt− τn(x)
∣∣∣∣ =
∣∣∣∣∣∫ x
x0
f(t)dt−∫ x
x0
n∑k=1
fk(t)dt
∣∣∣∣∣ =
∣∣∣∣∫ x
x0
[f(t)− Sn(t)] dt
∣∣∣∣ ≤ ∫ x
x0
|f(t)− Sn(t)| dt < ε
b− a
∫ x
x0
dt < ε, (6)
tj. niz (τn) konvergira ka∫ xx0f(t)dt uniformno na [a, b] pa je∫ x
x0
f(t)dt =∞∑k=1
∫ x
x0
fk(t)dt ili
∫ x
x0
∞∑k=1
fk(t)dt =∞∑k=1
∫ x
x0
fk(t)dt. (7)
56

Teorem 3. Ako red∑∞
k=1 fk konvergira uniformno ka funkciji f na segmentu [a, b] , akopostoje i neprekidne su derivacije f ′k, k = 1, 2, . . . ..., na [a, b] i ako red
∑∞k=1 f
′k konvergira
uniformno na [a, b], tada je (∞∑k=1
fk
)′=∞∑k=1
f ′k. (8)
Dokaz. Stavimo
h =∞∑k=1
f ′k. (9)
Tada je na osnovu ranijeg teorema, h neprekidna funkcija na [a, b] . Treba dokazati da jeh = f ′ tj. h(x) = f ′(x), x ∈ [a, b] . Prema Teoremu 2. za x, x0 ∈ [a, b] je∫ x
x0
h(t)dt =
∫ x
x0
(∞∑k=1
f ′k(t))dt =∞∑k=1
∫ x
x0
f ′k(t)dt =∞∑k=1
fk(x)−∞∑k=1
fk(x0). (10)
Prema ranijoj tvrdnji (o deriviranju integrala po gornjoj granici) je
h(x) =
(∫ x
x0
h(t)dx
)′x
=
(∞∑k=1
fk(x)
)′−
(∞∑k=1
fk(x0)
)′= f ′(x). (11)
Teorem 4 (Svojstva reda potencija). Neka je r radijus konvergencije i f suma reda poten-cija. Tada vrijedi:
1. funkcija f je neprekidna na intervalu 〈–r, r〉,
2. red potencija mozemo integrirati clan po clan na svakom segmentu [x1, x2] sadrzanomu intervalu 〈–r, r〉,
3. red potencija mozemo derivirati clan po clan na 〈–r, r〉,
4. pri integriranju i deriviranju reda potencija ne mijenja se polumjer konvergencije togareda.
Dokaz. Dokazimo prvo 4. Za to je dovoljno dokazati da red∞∑k=1
kakxk−1 ima isti radijus
konvergencije kao red∞∑k=0
akxk. A to je tocno jer lim
k→∞
k√k = 1 povlaci
limk→∞|kak|1/k = lim
k→∞|ak|1/k . (12)
Ako je I zajednicki interval konvergencije redova∞∑k=0
akxk i
∞∑k=1
kakxk−1, tada za proizvoljno
x ∈ I postoji segment [a, b] takav da x ∈ [a, b] ⊂ I . Prema Abel-ovom teoremu∞∑k=1
kakxk−1
57

konvergira uniformno na [a, b] pa prema Teoremu 3. imamo(∞∑k=0
akxk
)′=∞∑k=0
(akxk)′ =
∞∑k=1
kakxk−1, (13)
pa je dokazano 3. Tvrdnje 1. i 2. dobiju se na osnovu 3., teorema o unifornmoj konvergencijireda neprekidnih funkcija i Teorema 2.
58

5 FURIEROVI REDOVI
5.1 Periodicne funkcije. Trigonometrijski redovi
Definicija 1. Za funkciju f : R→ R kazemo da je periodicna ako postoji broj τ > 0 takavda je
f(x+ τ) = f(x), x ∈ R. (1)
Broj τ za koji vrijedi (1) zove se period funkcije f , a najmanji (ako postoji) od periodazovemo temeljni period funkcije f . Temeljni period funkcije f(x) = sin x je 2π . Akofunkcije f, g : R → R imaju isti period τ , onda je i njihova linearna kombinacija λf + µgperiodicna funkcija perioda τ . Dakle, skup svih realnih periodicnih funkcija istog periodacini vektorski prostor. Iz (1) slijedi
f(x+mτ) = f(x), x ∈ R,m ∈ Z. (2)
Graf periodicne funkcije dobiva se tako da se nacrta graf na [0, τ〉 ili na[− τ
2, τ
2
⟩i onda se
taj dio translatira lijevo i desno za cjelobrojne kratnike perioda τ .
Slika 1.
Ako je funkcija f definirana na[− τ
2, τ
2
⟩onda translatacijom lijevo i desno grafa te
funkcije za cjelobrojne kratnike broja τ dobijemo graf funkcije F : R→ R koja ima periodτ i za koju vrijedi
F (x) = f(x),∀x ∈[−τ
2,τ
2
⟩. (3)
(vidi Sliku1.). Kazemo da je funkcija F dobivena prosirenjem funkcije f po periodicnosti.Za svako x ∈ R odredeni su cijeli broj m i broj t ∈
[− τ
2, τ
2
⟩takvo da je x = mτ+ t. Funkcija
F je definirana na R saF (x) = f(t). (4)
Ako je g realna funkcija definirana na[0, τ
2
⟩, τ > 0 , onda postoji parna funkcija G : R→ R
koja je periodicna perioda τ i takva da je
G(x) = g(x), x ∈[0,τ
2
⟩. (5)
59

Zaista, definirajmo funkciju G1 :⟨− τ
2, τ
2
⟩→ R tako da je
G1(x) =
{g(x), x ∈ [0, τ
2〉
g(−x), x ∈ 〈−π2, 0〉.
(6)
Graf funkcije G1 dobije se tako da se grafu funkcije g doda njemu simetrican graf u odnosuna y-os. Sada definiramo funkciju G2 : [− τ
2, τ
2〉 → R tako da bude
G2(x) = G1(x), ∀x ∈⟨−τ
2,τ
2
⟩. (7)
G2(− τ2) uzimamo proizvoljno npr.
G2
(−τ
2
)= 0. (8)
Prosirenjem funkcije G2 po periodicnosti dolazimo do periodicne funkcije G perioda τ (vidiSliku 2.) koja ima svojstva
G |[0, τ2〉= g, G(−x) = G(x), ∀x ∈ R. (9)
Slika 2.
Funkciju h : [0, τ2〉 → R mozemo prosiriti do neparne periodicne funkcije perioda τ ako
je h(0) = 0. Prvo definirajmo H1 : 〈− τ2, τ
2〉 → R tako da je
H1(x) =
{h(x), x ∈ [0, τ
2〉
−h(−x), x ∈ 〈− τ2, 0〉.
(10)
Zatim definirajmo H2 : [− τ2, τ
2〉 → R tako da je
H2(x) = H1(x), ∀x ∈⟨−π
2,π
2
⟩, (11)
H2(− τ2) uzimamo proizvoljno, npr.
H2
(−τ
2
)= 0 (12)
60

Prosirenjem po periodicnosti funkcije H2 dobivamo periodicnu funkciju H perioda τ (vidiSliku 3.) za koju je
H |[0, τ2〉= h, H(−x) = −H(x), ∀x ∈ R. (13)
Slika 3.
Najvaznije periodicne funkcije su sinusoidalne funkcije tj. funkcije oblika
t→ A sin(ωt+ ϕ), (14)
gdje su A - amplituda, ϕ-faza i ω 6= 0 kruzna frekvencija (svi realni brojevi). Funkcija (14)ima period τ = 2π
ω. Takoder linearna kombinacija
t→n∑k=0
Ak sin(kωt+ ϕk), (15)
funkcija oblika (14) je periodicna perioda 2πω
. Ako funkcija f : R → R ima period τ ondafunkcija
g(x) = f( τ
2πx), x ∈ R, (16)
ima period 2π, jer je
g(x+ 2π) = f(τ
2π(x+ 2π)) = f(
τx
2π+ τ) = f(
τx
2π) = g(x).
Zbog toga, ne narusavajuci opcenitost uzimati cemo da se radi o funkcijama periodaτ = 2π. Funkcija
t→n∑k=0
Ak sin(kx+ ϕk), Ak, ϕk ∈ R, (17)
zove se trigonometrijski polinom. Zbog
sin(kx+ ϕk) = sinϕk cos kx+ cosϕk sin kx,
61

svaki trigonometrijski polinom (17) ima oblik
n∑k=0
ak cosx+ bk sin kx, x ∈ R, ak, bk ∈ R. (18)
Zadatak: Da li se periodicna funkcija perioda 2π aproksimira trigonometrijskim polinomomoblika (18)? To nas vodi na trigonometrijske redove.Red funkcija
a0
2+ a1 cosx+ b1 sinx+ a2 cos 2x+ b2 sin 2x+ · · ·+ an cosnx+ bn sinnx+ . . . , x ∈ R, (19)
zove se trigonometrijski red, a a0, a1, . . . koeficijenti reda. Ako red konvergira za svakox ∈ R onda on definira funkciju f : R→ R koja ima period 2π.
5.2 Fourierov red funkcije
Treba odrediti a0, a1, b1, a2, b2, . . . takve da vrijedi
f(x) =a0
2+ a1 cosx+ b1 sinx+ a2 cos 2x+ b2 sin 2x
+ · · ·+ an cosnx+ bn sinnx+ · · · =
=a0
2+
n∑k=1
ak cos kx+ bk sin kx.
(1)
Integriramo li (1) od −π do π, onda zbog∫ π
−πsin kxdx = 0,
∫ π
−πcos kxdx = 0, (k 6= 0), (2)
dobivamo ∫ π
−πf(x) =
a0
2
∫ π
−πdx+
∫ π
−π(∞∑k=1
ak cos kx+ bk sin kx) dx
=a0
2· 2π +
∞∑k=1
∫ π
−π(ak cos kx+ bk sin kx) dx = a0π.
(3)
Dakle je
a0 =1
π
∫ π
−πf(x)dx. (4)
Odredivanje koeficijenata ak, bk iz (1) oslanja se na formule∫ π
−πsin px cos qx dx = 0, p, q = 1, 2, . . .∫ π
−πsin px sin qx dx = πδpq,∫ π
−πcos px cos qx dx = πδpq,
(5)
62

gdje je
δpq =
{0, p 6= q
1, p = qp, q ∈ N.
Pomnozimo li (1) sa cos kx, tj. sa sin kx i dobiveni red integriramo clan po clan od −π doπ onda na osnovu (5) dobivamo∫ π
−πf(x) cos kx dx = π · ak,
∫ π
−πf(x) sin kxdx = π · bk. (6)
Prema tome je
ak =1
π
∫ π
−πf(x) cos kxdx, k = 0, 1, 2, . . . , (7)
bk =1
π
∫ π
−πf(x) sin kxdx, k = 1, 2, . . . . (8)
Vazno je uociti da smo (4) ,(7) i (8) dobili integriranjem reda funkcija clan po clan, stoznamo da nije uvijek moguce. Umjesto opravdanja postupka od (1) do (8), razmatranjepocinjemo diskusijom formula (7) i (8).
1. Neka je funkcija f definirana na [−π, π] osim mozda u konacno tocaka i neka integrali(7) i (8) postoje kao pravi i nepravi. Brojeve koji su definirani sa (7) i (8) zovemoFourierovi koeficijenti funkcije f. Specijalno, svaka neprekidna funkcija, odnosno podijelovima neprekidna periodicna funkcija perioda 2π ima Fourierove koeficijente.
2. Red sa koeficijentima po (7) i (8)
a0
2+∞∑k=1
ak cos kx+ bk sin kx, x ∈ R, (9)
zove se Fourierov red funkcije f .
Treba odgovoriti na pitanja:
a) Da li red (9) konvergira?
b) Ako konvergira u tocki x ka S(x), da li je S(x) = f(x), tj. da li konvergira ka funkciji f .
Teorem 1 (Dirichletov teorem). Pretpostavke za funkciju f : [−π, π]→ R:
(i) Postoji konacni skup A ⊂ [−π, π] takav da je f neprekidna u svakoj tocki skupa [−π, π]\A.Ukoliko je A 6= ∅ onda u svakoj tocki skupa A ima prekid prve vrste.
(ii) Postoji subdivizija−π = x0 < x1 < · · · < xn = π
segmenta [−π, π] na konacno dijelova takva da je funkcija f monotona na svakomsegmentu [xk−1, xk], k = 1, 2, . . . , n.
63

Zakljucak:
1. Fourierov red funkcije f konvergira za svako realno x. Neka je S : R→ R funkcija kojutaj red definira.
2. Ako je funkcija f neprekidna u tocki x ∈ 〈−π, π〉 onda je f(x) = S(x).
3. Ako je funkcija f ima prekid u tocki x ∈ 〈−π, π〉 onda je
S(x) =f(x+) + f(x−)
2. (10)
4. Na krajevima intervala je
S(−π) = S(π) =f(−π+) + f(π−)
2. (11)
Uvjeti (i) i (ii) zovu se Dirichletovi uvjeti. Zbog periodicnosti funkcije S mora bitiS(−π) = S(π), a to je jednako aritmetickoj sredini desnog limesa f(−π+) u lijevom rubu ilijevog limesa f(π−) u desnom rubu funkcije f.Kako je f(x) = S(x) za sve osim konacno mnogo elemenata x pisemo
f(x) =a0
2+∞∑k=1
ak cos kx+ bk sin kx
i kazemo da je funkcija f razvijena u Fourierov red.Dokazat cemo samo konvergenciju Fourierovog reda (9) funkcije f uz pretpostavku da f imaneprekidnu drugu derivaciju na [−π, π]. Parcijalnom integracijom iz (7) dobivamo
ak =1
π
∫ π
−πf(x) cos kx dx =
∣∣∣∣ f(x) = u, du = f ′(x) dxcos kx dx = dv, v = 1
ksin kx
∣∣∣∣ =
=1
kπf(x) sin kx︸ ︷︷ ︸
=0
∣∣∣∣∣π
−π
− 1
kπ
∫ π
−πf ′(x) sin kx dx =
∣∣∣∣ f ′(x) = u, du = f ′′(x) dxsin kx dx = dv, v = − 1
kcos kx
∣∣∣∣ =
=f ′(x)
k2πcos kx︸ ︷︷ ︸
=0
∣∣∣∣∣π
−π
− 1
k2π
∫ π
−πf ′′(x) cos kx dx.
(12)
Kako je funkcija f” neprekidna na segmentu [−π, π] to postoji realan broj M > 0 takav daje
|f ′′(x)| ≤M, x ∈ [−π, π]. (13)
Sada iz (12) dobivamo
|ak| =1
k2π
∣∣∣∣∫ π
−πf ′′(x) cos kx dx
∣∣∣∣ ≤ 1
k2πM · 2π =
2M
k2. (14)
64

Analogno dobivamo da je
|bk| =2M
k2. (15)
Time se red (9) od funkcije f majorizira konvergentnim redom
|a0|2
+ 2M(1 + 1 +1
22+
1
22+
1
32+
1
32+ · · ·+ 1
k2+
1
k2+ . . . ),
pa mozemo zakljuciti da red (9) uniformno konvergira. Znatno je teze dokazati da red(9) konvergira ka funkciji f za ∀x ∈ [−π, π].
Primjer 1. Naci Fourierov red funkcije
f(x) =
{−1, x ∈ [−π, 0〉1, x ∈ [0, π〉
f(x+ 2π) = f(x).
Funkcija f je neparna za sve x 6= kπ, pa su i f(x) · cos kx neparne funkcije za iste x i zak = 0, 1, 2, . . . . Zbog toga je
ak =1
π
∫ π
−πf(x) cos kx dx = 0,
bk =1
π
∫ π
−πf(x) sin kx dx =
1
π[
∫ 0
−π(−1) sin kx dx+
∫ π
0
sin kx dx] =1
π[cos kx
k
∣∣∣∣∣0
−π
−
− cos kx
k
∣∣∣∣∣π
0
] =2
kπ(1− cos kπ) =
2
kπ(1− (−1)k) =
{0, k paran,4kπ, k neparan.
Dakle, dobivamo
b1 =4
π, b2 = 0, b3 =
4
3π, b4 = 0, . . . .
Fourierov red zadane funkcije f je
4
π(sinx+
sin 3x
3+
sin 5x
5+ . . . ) (16)
Po Teoremu 1. red konvergira ka f(x) za x 6= kπ. Za x = 0 (ili x = kπ) red konvergira ka0 jer je
f(0+) + f(0−)
2=
1− 1
2= 0,
f(−π+) + f(π−)
2=
1− 1
2= 0.
Primijetimo da grafovi trigonometrijskih polinoma (vidi Sliku 1.) se sve vise priljubljujugrafu funkcije f pa se funkcija f moze tim polinomima aproksimirati. Uzimajuci u obzirTeorem 1. iz gornjeg razvoja funkcije f dobivamo za x = π
2jednakost
4
π
(1− 1
3+
1
5− . . .
)= f(
π
2) = 1,
65

Slika 1.
tj. jednakost
π = 4(1− 1
3+
1
5− . . . ),
sto moze posluziti za racunanje broja π.
Primjer 2. Funkciju f(x) = x2, x ∈ [−π, π] rastaviti u Fourierov red.Funkcija f je neprekidna i parna na [−π, π] i zadovoljava uvijete Teorema 1. Kako je x →x2 sin kx neparna funkcija za k = 1, 2, . . .to je
bk =1
π
∫ π
−πx2 sin kx dx = 0.
Za koeficijente ak, k = 0, 1, 2, . . . dobivamo
a0 =1
π
∫ π
−πx2 dx =
2
π
∫ π
0
x2 dx =2
π· π
3
3=
2π2
3,
ak =1
π
∫ π
−πx2 cos kx dx =
2
π
∫ π
0
x2 cos kx dx =2
π[x2 sin kx
k
∣∣∣∣∣π
0
− 2
k
∫ π
0
x sin kx dx] =
4
kπ[x cos kx
k
∣∣∣∣∣π
0
− 1
k
∫ π
0
cos kx dx] = (−1)k · 4
k2, k = 1, 2, . . .
Time dobivamo
x2 =π2
3+ 4
∞∑k=1
(−1)kcos kx
k2, x ∈ [−π, π].
Red ne prestavlja funkciju x→ x2 van fregmenta [−π, π] vec funkciju f(x) = x2 na [−π, π]koja se za ostale x periodicno ponavlja (vidi Sliku 2.)
66
Slika 2.
Stavimo li u gornji red x = 0 dobivamo
−π2
3= 4[−1 +
1
22− 1
32+ . . . (−1)k
1
k2+ . . . ],
tj.
π2
12= 1− 1
22+
1
32− · · ·+ (−1)k−1 1
k2+ . . .
Uvedimo oznake za sljedece redove
ς = 1 +1
4+
1
9+
1
16+ . . . ,
ς1 = 1 +1
9+
1
25+
1
49+ . . .
onda je
ς = ς1 +1
4+
1
16+
1
36+ · · · = ς1 +
1
4ς,
tj.
ς1 =3
4ς.
Sada iz razvoja π2
12dobivamo
1− 1
4+
1
9− 1
16+ · · · = ς1 −
1
4ς =
1
2ς =
π2
12.
Dakle,
ς = 1 +1
4+
1
9+ · · · = π2
6,
ς1 = 1 +1
9+
1
25+ · · ·+ 1
(2n+ 1)2+ · · · = π2
8.
67

6 FUNKCIJE DVIJE I TRI VARIJABLE
6.1 Osnovna svojstva
Neka je P0 = (x0, y0) tocka u R2. Otvorenom okolinom polumjera r oko tocke P0 zovemoskup
U(P0, r) = {P = (x, y)|P ∈ R2, (x− x0)2 + (y − y0)2 < r}.
Analogno, otvorena okolina tocke P0 = (x0, y0, z0) iz R3 polumjera r je
U(P0, r) = {P = (x, y, z)|P ∈ R3, (x− x0)2 + (y − y0)2 + (z − z0)2 < r}.
Skup G ⊆ R2 (ili G ⊆ R3) je otvoren ako za svaku tocku P tog skupa postoji otvorenaokolina U(P, r) koja je sadrzana u skupu G.
Ovdje razmatramo samo realne funkcije, tj. funkcije f : W → R gdje je W ⊆ R2 iliW ⊆ R3. Te funkcije se zovu funkcije dvije odnosno tri varijable.
Neka je f : G→ R, G otvoren skup u R2, i neka su P0 = (x0, y0) i P = (x0 + h, y0 + k)tocke iz G. Izraz
∆f(P0) = f(x0 + h, y0 + k)− f(x0, y0) (1)
zovemo totalni prirastaj funkcije f u tocki P0. Izrazi
∆xf(P0) = f(x0 + h, y0)− f(x0, y0), (2)
∆yf(P0) = f(x0, y0 + k)− f(x0, y0) (3)
se zovu parcijalnim prorastajima funkcije f u tocki P0.Funkcija f je neprekidna u tocki P0 ∈ G ako i samo ako je
lim√h2+k2→0
∆f(P0) = 0. (4)
Parcijalna derivacija funkcije f u tocki P0 po varijabli x je limes
Dxf(P0) = limh→0
∆xf(P0)
h(5)
(kada god taj limes postoji). Analogno, parcijalna derivacija funkcije f u tocki P0 povarijabli y je limes (kada god on postoji)
Dyf(P0) = limk→0
∆yf(P0)
k. (6)
Funkciju Dxf , odnosno Dyf , zovemo parcijalnom derivacijom od f . Umjesto Dxf(P0) iDyf(P0) koristimo i oznake ∂f
∂x(P0) i ∂f
∂y(P0) ili oznake f ′x(P0) i f ′y(P0).
Geometrijsko tumacenje parcijalnih derivacija u tocki P0 = (x0, y0). Imamo
f ′x(P0) = limh→0
f(x0 + h, y0)− f(x0, y0)
h,
68

f ′y(P0) = limk→0
f(x0, y0 + k)− f(x0, y0)
k.
Presjecanjem plohe z = f(x, y) ravninama x = x0 i y = y0 dobiju se krivulje L1 i L2 (Slika1.) koje prolaze tockom (x0, y0, f(x0, y0)). Stavimo g(x) = f(x, y0) i h(y) = f(x0, y) paimamo
g′(x0) = f ′x(x0, y0),
h′(x0) = f ′y(x0, y0).
Slika 1.
Jasno je da je f′x(x0, y0) = tgα, f
′y(x0, y0) = tg β gdje su α i β kutovi sto ih tangente na
L2 i L1 u tocki (x0, y0, f(x0, y0)) zatvaraju sa pozitivnim smjerom x-osi i y-osi, respektivno.Parcijalne derivacije drugog reda funkcije z = f(x, y) su
f ′′xx =∂
∂x
(∂f
∂x
), f ′′xy =
∂
∂y
(∂f
∂x
), f ′′yx =
∂
∂x
(∂f
∂y
), f ′′yy =
∂
∂y
(∂f
∂y
).
Teorem 1 (Schwartz). Neka je G otvoren skup u R2. Ako funkcija f : G → R imaneprekidne parcijalne derivacije f ′′xy i f ′′yx u tocki (x, y) ∈ G, onda je
f ′′xy(x, y) = f ′′yx(x, y). (7)
Definicija 1. Neka je G otvoren skup u R2 i neka su (x, y) i x+ h, y + k tocke u G.
69

1. Kazemo da je funkcija z = f(x, y) su G u R diferencijabilna u tocki (x, y) iz G akopostoje konstante A(x, y) i B(x, y) takve da je
∆z = ∆f(x, y) = Ah+Bk +O(ρ), ρ =√h2 + k2. (8)
Za funkciju O(ρ) vrijedi O(ρ)→ 0 za ρ→ 0.
2. Ako je funkcija z = f(x, y) diferencijabilna u tocki (x, y) onda se dio Ah + Bkprirastaja ∆f(x, y) zove totalni diferencijal funkcije f u tocki (x, y) i oznacava sadz ili sa df(x, y), tj. imamo
dz = df(x, y) = Ah+Bk. (9)
Teorem 2. Neka je G otvoren skup u R2. Ako je funkcija z = f(x, y) diferencijabilna utocki (x, y) ∈ R onda postoje parcijalne derivacije ∂z
∂xi ∂z∂y
u tocki (x, y) i formule (8) i (9)glase
∆z = h∂z
∂x+ k
∂z
∂y+O(ρ), (10)
dz =∂z
∂xdx+
∂z
∂ydy =
(∂
∂xdx+
∂
∂ydy
)z. (11)
Dokaz. Zbog diferencijabilnosti funkcije z = f(x, y) u tocki (x, y) postoje konstante A i Btakve da vrijedi (8). Odatle za k = 0 dobivamo
∆xz = Ah+O(|h|)
sto daje∂z
∂x= lim
h→0
∆xz
h= A.
Analogno dobivamo da je ∂z∂y
= B. Primijetimo da je h = ∆x = dx i k = ∆y = dy pa
formule (8) i (9) mozemo pisati kao (10) i (11).
Primijetimo da postojanje parcijalnih derivacija f ′x i f ′y nije dovoljan uvjet za diferenci-jabilnost funkcije f u tocki (x, y).
Teorem 3. Neka je G otvoren skup u R2. Ako funkcija f : g → R ima derivacije f ′x i f ′yna G koje su neprekidne u tocki (x, y) ∈ G onda je f diferencijabilna u (x, y).
Definicija 2. (i) Kazemo da je funkcija f : G→ R klase C1 na otvorenom skupu G ⊂ R2
ako je f zajedno sa svojim parcijalnim derivacijama Dxf , Dyf neprekidna na G.
(ii) Kazemo da je f klase Cp na G ako je ona klase Cp−1 na G i ako su njene parcijalnederivacije reda p neprekidne na G.
(iii) Kazemo da je f klase C∞ na G ako je ona klase Cp za svaki p ∈ N.
70

Pretpostavimo da je funkcija z = f(x, y) klase C2 sa otvorenog skupa G u R2. Tadaona ima parcijalne derivacije drugog reda na G. Pri deriviranju smatramo da su h = dx ik = dy konstante pa imamo
d2z = d(dz) = d[∂z∂xdx+ ∂z
∂ydy]
= d(∂z∂x
)dx+ d
(∂z∂y
)dy =
=[∂2z∂x2dx+ ∂2z
∂y∂xdy]dx+
[∂2z∂x∂y
dx+ ∂2z∂y2dy]dy =
= ∂2z∂x2dx2 + 2 ∂2z
∂x∂ydxdy + ∂2z
∂y2dy2 =
(∂∂xdx+ ∂
∂ydy)2
z.
(12)
Analogno se definira diferencijal treceg reda itd. Matematickom indukcijom se dokazujeda vrijedi
dnz =
(∂
∂xdx+
∂
∂ydy
)nz
za funkciju z = f(x, y) klase Cn na G.
71
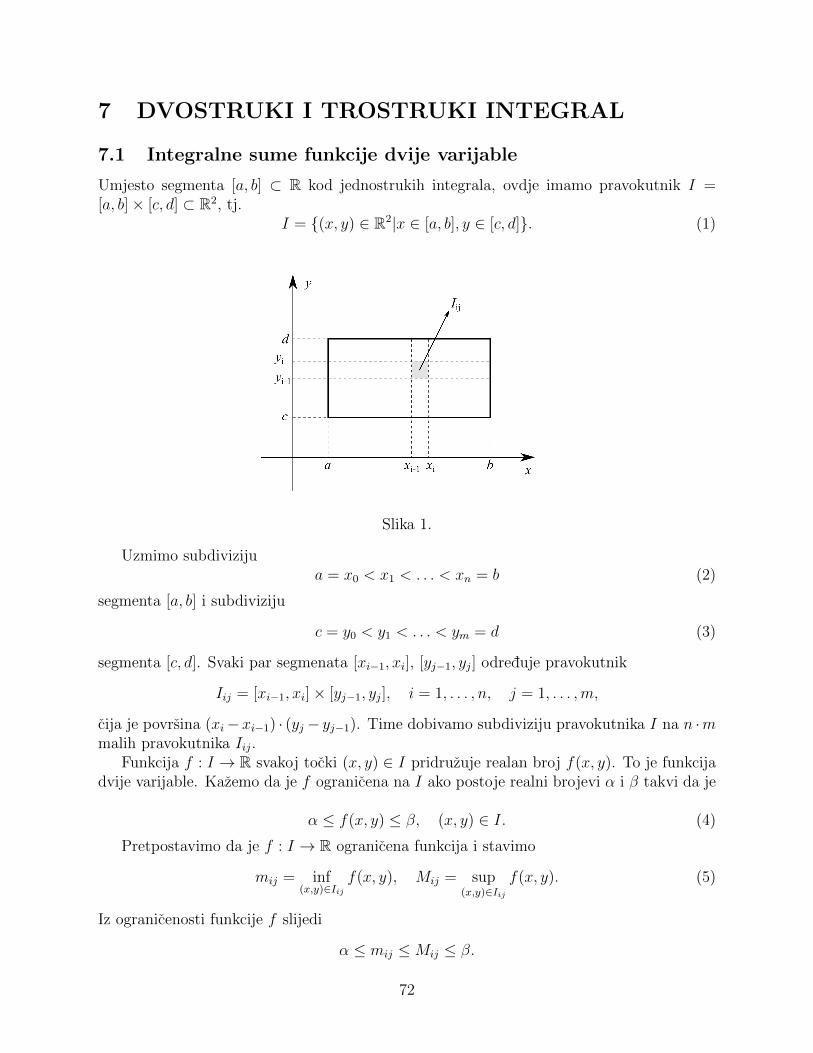
7 DVOSTRUKI I TROSTRUKI INTEGRAL
7.1 Integralne sume funkcije dvije varijable
Umjesto segmenta [a, b] ⊂ R kod jednostrukih integrala, ovdje imamo pravokutnik I =[a, b]× [c, d] ⊂ R2, tj.
I = {(x, y) ∈ R2|x ∈ [a, b], y ∈ [c, d]}. (1)
Slika 1.
Uzmimo subdivizijua = x0 < x1 < . . . < xn = b (2)
segmenta [a, b] i subdiviziju
c = y0 < y1 < . . . < ym = d (3)
segmenta [c, d]. Svaki par segmenata [xi−1, xi], [yj−1, yj] odreduje pravokutnik
Iij = [xi−1, xi]× [yj−1, yj], i = 1, . . . , n, j = 1, . . . ,m,
cija je povrsina (xi−xi−1) · (yj − yj−1). Time dobivamo subdiviziju pravokutnika I na n ·mmalih pravokutnika Iij.
Funkcija f : I → R svakoj tocki (x, y) ∈ I pridruzuje realan broj f(x, y). To je funkcijadvije varijable. Kazemo da je f ogranicena na I ako postoje realni brojevi α i β takvi da je
α ≤ f(x, y) ≤ β, (x, y) ∈ I. (4)
Pretpostavimo da je f : I → R ogranicena funkcija i stavimo
mij = inf(x,y)∈Iij
f(x, y), Mij = sup(x,y)∈Iij
f(x, y). (5)
Iz ogranicenosti funkcije f slijedi
α ≤ mij ≤Mij ≤ β.
72

Iz svakog pravokutnika uzmemo po jednu proizvoljnu tocku (si, tj) i napravimo sume
s =n∑i=1
m∑j=1
mij(xi − xi−1)(yj − yj−1)(donja integralna suma)(donja Darbouxova suma),
(6)
S =n∑i=1
m∑j=1
Mij(xi − xi−1)(yj − yj−1)(gornja integralna suma)(gornja Darbouxova suma),
(7)
σ =n∑i=1
m∑j=1
f(si, tj)(xi − xi−1)(yj − yj−1) (integralna suma). (8)
Uvijek jeα(b− a)(d− c) ≤ s ≤ S ≤ β(b− a)(d− c). (9)
7.2 Definicija dvostrukog integrala i osnovna svojstva
Neka je A skup svih donjih, B skup svih gornjih integralnih suma funkcije f koje se dobijuuzimanjem svih mogucih subdivizija pravokutnika I na opisani nacin u 7.1. Iz (9) u 7.1 sevidi da je skup A ogranicen odozgo, a skup B ogranicen odozdo, pa u skupu R postoje
supA = I∗(f ; I), inf B = I∗(f ; I). (1)
I∗(f ; I) se zove donji Riemannov integral, a I∗(f ; I) gornji Riemannov integral funkcije fpo pravokutniku I. Uvijek je
I∗(f ; I) ≤ I∗(f ; I) (2)
Definicija 1. Za ogranicenu funkciju f : I → R kazemo da je R-integrabilna (po Riemannu)na pravokutniku I ⊂ R2, ako je
I∗(f ; I) = I∗(f ; I). (3)
Tada se broj I(f ; I) = I∗(f ; I) = I∗(f ; I) zove R-integral funkcije f po pravokutniku I ioznacava sa
I(f ; I) =
∫∫I
f(x, y)dxdy =
∫ b
a
∫ d
c
f(x, y)dxdy. (4)
(4) se zove dvostruki integral jer se radi o integraciji funkcije dvije varijable. Lakozakljucujemo da vrijedi
α(b− a)(c− d) ≤∫∫
I
f(x, y)dxdy ≤ β(b− a)(d− c). (5)
Sto ako nemamo pravokutnik, tj. kako definirati integral funkcije f : D → R, D ⊆ R2,gdje D nije pravokutnik?
Neka je D ogranicen skup, tj. postoji M > 0 takav da je
D ⊂ {(x, y)|x2 + y2 ≤M2}
73

Slika 1: Integriranje gdje podrucje integracije nije pravokutnik.
(D je podskup kruga polumjera M). Za taj skup postoji pravokutnik I = [a, b]× [c, d] kojisadrzi D (vidi Sliku 1.).
Ako je f : D → R ogranicena funkcija onda f prosirujemo do ogranicene funkcijef : I → R sa
f(x, y) =
{f(x, y), (x, y) ∈ D0, (x, y) 6∈ D. (6)
Ocigledno je da je f ogranicena na I. Ako je f integrabilna na I onda po definiciji uzimamo∫∫D
f(x, y)dxdy =
∫∫I
f(x, y)dxdy. (7)
Svojstva dvostrukog integrala po D:Neka su f i g integrabilne funkcije na D. Tada vrijedi
1. Aditivnost ∫∫D
(f + g)(x, y)dxdy =
∫∫D
f(x, y)dxdy +
∫∫D
g(x, y)dxdy,
2. Homogenost ∫∫D
(λ · f)(x, y)dxdy = λ
∫∫D
f(x, y)dxdy, λ ∈ R,
3. Monotonost
(f(x, y) ≤ g(x, y), (x, y) ∈ D) ⇒∫∫
D
f(x, y)dxdy ≤∫∫
D
g(x, y)dxdy,
74
4. Aditivnost po podrucju integracije∫∫D1∪D2
f(x, y)dxdy =
∫∫D1
f(x, y)dxdy +
∫∫D2
f(x, y)dxdy,
ako D1 ∩D2 nema unutarnjih tocaka, tj. D1 i D2 se presjecaju po nekoj krivulji, tj.povrsina od D1 ∩D2 je jednaka nuli.
7.3 Izracunavanje dvostrukog integrala
Kod izracunavanja dvostrukog integrala imamo nekoliko jednostavnih slucaja podrucja in-tegracije.
1./ Neka je podrucje integracije pravokutnik I = [a, b]× [c, d]. Integral∫∫I
f(x, y)dxdy (1)
racunamo pomocu jednostrukih integrala. Prvo se za dano x posmatra funkcija y → f(x, y)na segmentu [c, d]. Nju integriramo i dobivamo funkciju
x→∫ d
c
f(x, y)dy. (2)
Sada integriramo tu funkciju po x na segmentu [a, b] i dobivamo∫ b
a
(∫ d
c
f(x, y)dy
)dx, (3)
sto pisemo u obliku ∫ b
a
dx
∫ d
c
f(x, y)dy, ili
∫ b
a
∫ d
c
f(x, y)dxdy.
Mogli smo analogno prvo funkciju integrirati po x od a do b, a potom po y od c do d idobivamo broj ∫ d
c
(∫ b
a
f(x, y)dx
)dy. (4)
Uz siroke pretpostavke na funkciju f (npr. neprekidnost od f je dovoljna) sva tri inte-grala (1), (3) i (4) su jednaka i vrijedi∫∫
I
f(x, y)dxdy =
∫ b
a
(∫ d
c
f(x, y)dy
)dx =
∫ d
c
(∫ b
a
f(x, y)dx
)dy. (5)
Time dvostruki integral svodimo na uzastopno izracunavanje jednostrukog integrala.
Primjer 1. Neka je I = [2, 10]× [1, 7] pravokutnik s vrhovima (2, 1), (10, 1), (10, 7), (2, 7)
i f(x, y) = xy. Naci
∫∫I
f(x, y)dxdy.
75

Rjesenje. ∫∫I
f(x, y)dxdy =
∫ 10
2
(∫ 7
1
xydy
)dx =
∫ 10
2
x ·
(y2
2
∣∣∣∣71
)=
= 24
∫ 10
2
xdx = 24 · x2
2
∣∣∣∣10
2
= 12 · 96 = 1152.
Obratno ∫∫I
f(x, y)dxdy =
∫ 7
1
(∫ 10
2
xydx
)dy = 48
∫ 7
1
ydy = 1152.
U ovom primjeru vrijedi
∫∫I
xydxdy =(∫ 10
2
xdx)·(∫ 7
1
ydy).
Opcenito, ako je f(x, y) = f1(x) · f2(y) onda vrijedi
∫∫I
f(x, y)dx =
∫ b
a
(∫ d
c
f1(x) · f2(y)dy)dx =
(∫ b
a
f1(x)dx)·(∫ d
c
f2(y)dy).
2/ Neka je podrucje integracije skup D ⊂ R2 odreden za
D = {(x, y) ∈ R2| x ∈ [a, b], g1(x) ≤ y ≤ g2(x)}
gdje su g1 i g2 zadane funkcije na [a,b] (Vidi Sliku 1.).Uzmimo brojeve c i d takve da je
c ≤ g1(x) ≤ g2(x) ≤ d , ∀x ∈ [a, b].
Napravimo prosirenje funkcije f : D → D tako da dobivamo funkciju∼f : [a, b]×[c, d]→ R
definiranu sa∼f(x, y) =
{f(x, y) , (x, y) ∈ D0 , (x, y) /∈ D.
Prema ranijoj definiciji imamo∫∫D
f(x, y)dxdy =
∫∫I
∼f(x, y)dxdy =
∫ b
a
(∫ d
c
∼f(x, y)dy
)dx. (6)
Kako je∫ d
c
∼f(x, y)dy =
∫ g1(x)
c
∼f(x, y)dy +
∫ g2(x)
g1(x)
∼f(x, y)dy +
∫ d
g2(x)
∼f(x, y)dy =
∫ g2(x)
g1(x)
∼f(x, y)dy
76
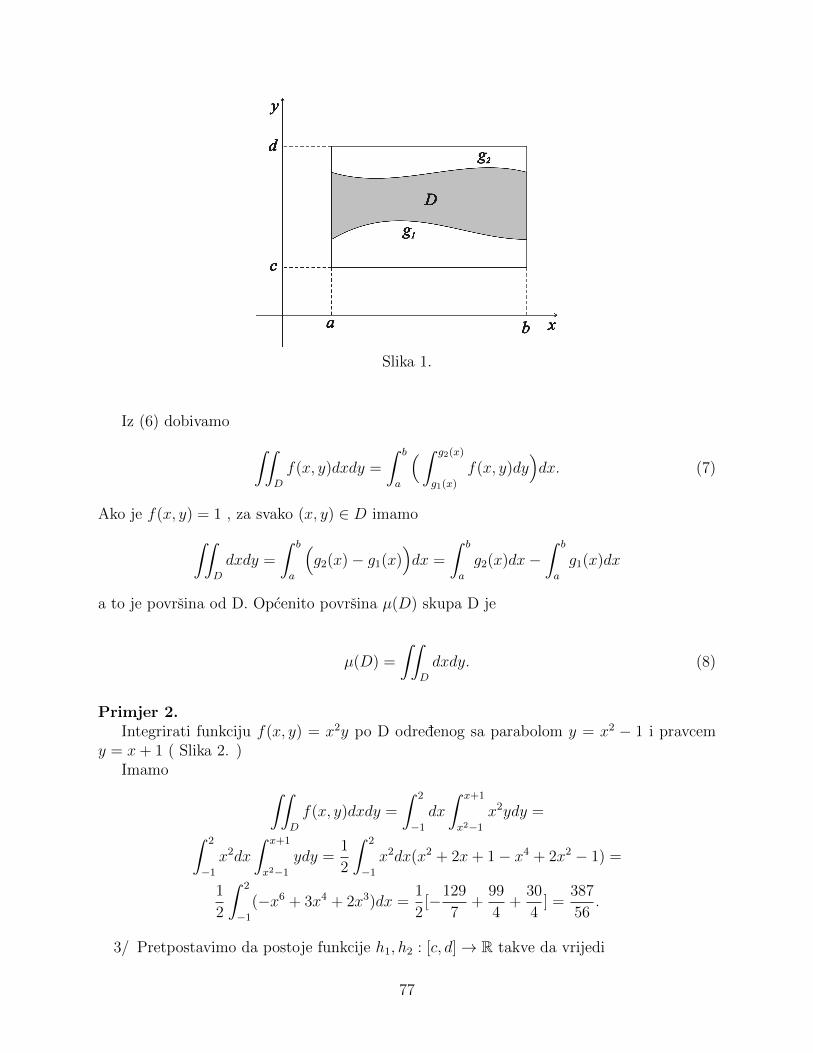
Slika 1.
Iz (6) dobivamo ∫∫D
f(x, y)dxdy =
∫ b
a
(∫ g2(x)
g1(x)
f(x, y)dy)dx. (7)
Ako je f(x, y) = 1 , za svako (x, y) ∈ D imamo∫∫D
dxdy =
∫ b
a
(g2(x)− g1(x)
)dx =
∫ b
a
g2(x)dx−∫ b
a
g1(x)dx
a to je povrsina od D. Opcenito povrsina µ(D) skupa D je
µ(D) =
∫∫D
dxdy. (8)
Primjer 2.Integrirati funkciju f(x, y) = x2y po D odredenog sa parabolom y = x2 − 1 i pravcem
y = x+ 1 ( Slika 2. )Imamo ∫∫
D
f(x, y)dxdy =
∫ 2
−1
dx
∫ x+1
x2−1
x2ydy =∫ 2
−1
x2dx
∫ x+1
x2−1
ydy =1
2
∫ 2
−1
x2dx(x2 + 2x+ 1− x4 + 2x2 − 1) =
1
2
∫ 2
−1
(−x6 + 3x4 + 2x3)dx =1
2[−129
7+
99
4+
30
4] =
387
56.
3/ Pretpostavimo da postoje funkcije h1, h2 : [c, d]→ R takve da vrijedi
77
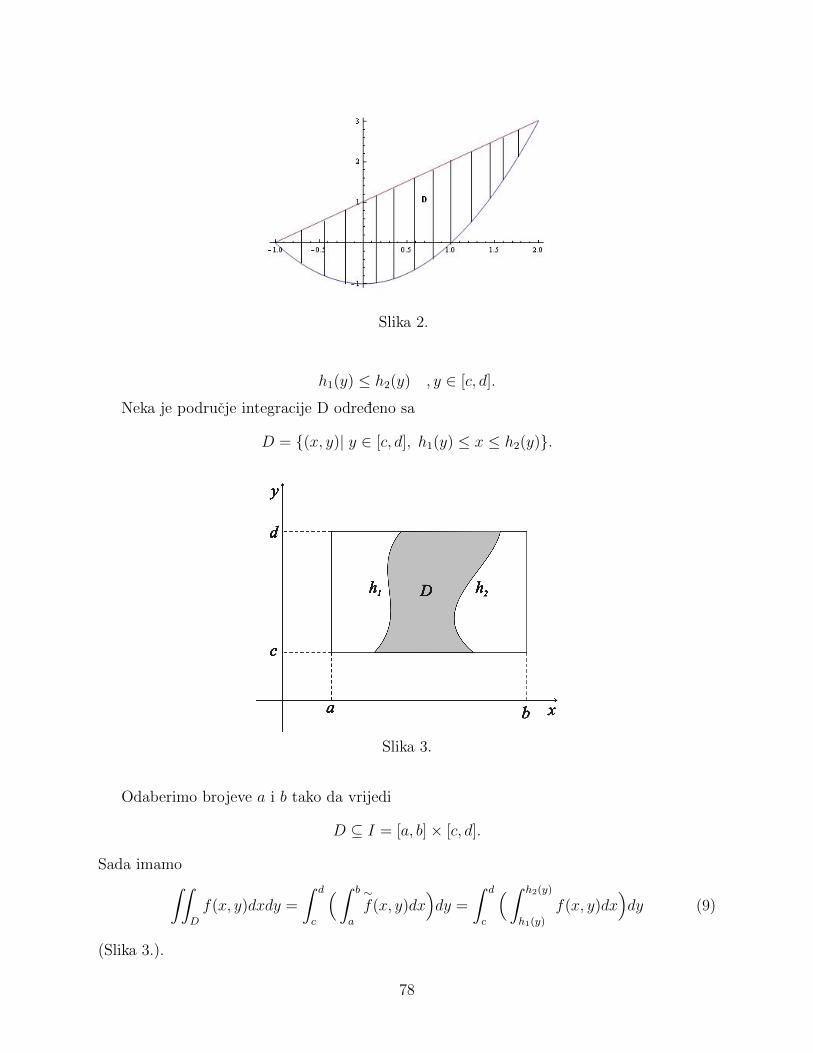
Slika 2.
h1(y) ≤ h2(y) , y ∈ [c, d].
Neka je podrucje integracije D odredeno sa
D = {(x, y)| y ∈ [c, d], h1(y) ≤ x ≤ h2(y)}.
Slika 3.
Odaberimo brojeve a i b tako da vrijedi
D ⊆ I = [a, b]× [c, d].
Sada imamo∫∫D
f(x, y)dxdy =
∫ d
c
(∫ b
a
∼f(x, y)dx
)dy =
∫ d
c
(∫ h2(y)
h1(y)
f(x, y)dx)dy (9)
(Slika 3.).
78

Primjer 3. Izracunati integral funkcije f(x, y) = x + y2 pa podrucje integracije Dogranicenog dijelom pravca x = 1 i lukom parabole x = y2, y ∈ [−1, 1] (Slika 4.).
Imamo∫∫D
f(x, y)dxdy =
∫ 1
−1
dy(∫ 1
y2(x+ y2)dx
)=
∫ 1
−1
dy(1
2− y4
2+ y2 − y4) =
16
15.
Mnogi dvostruki integrali se mogu izracunati svodenjem na jedan ili vise od navedenatri slucaja. Postupamo na sljedeci nacin. Paralelama sa x−osi i sa y−osi rastavimo skup Dna skupove D1, D2, . . . , Dk koji su tipa 1/, 2/ ili 3/ pa imamo (Slika 5.)∫∫
D
f(x, y)dxdy =
∫∫D1
f(x, y)dxdy +
∫∫D2
f(x, y)dxdy + · · ·+∫∫
Dk
f(x, y)dxdy.
Slika 4.
7.4 Volumen tijela
Neka je I = [a, b] × [c, d] pravokutnik u R2 i f : I → R zadana funkcija. Nanosimo livrijednost f(x, y) funkcije f u tocki (x, y) na aplikatu koordinatnog sustava dobijemo graf
Γf = {(x, y, f(x, y))|(x, y) ∈ I} (1)
funkcije f u prostoru. On predstavlja neku plohu u prostoru. Umjesto (1) pisemo
z = f(x, y), (x, y) ∈ I (2)
i kazemo da je (2) jednadzba plohe (1).
79

Slika 5.
Ako je f(x, y) ≥ 0, za svako (x, y) ∈ I, onda se ploha (1) nalazi iznad ravnine x0y ito nad pravokutnikom I. Skup tocaka prostora koji je omeden odozgo plohom (1), odozdopravokutnikom, a sa strane dijelovima ravnina paralelnim koordinatnim ravninama, zovemopseudo valjak. Opcenito valjak sa bazom S ⊆ R2 je skup S × R = {(x, y, z)|(x, y) ∈ S, z ∈R}. Ako je S krug imamo uobicajen valjak, a ako je S kruznica govorimo o cilindru.Subdivizijom pravokutnika I na pravokitnike Iij pravcima paralelnim sa y−osi i x−osiodgovara rastavljanje pseudo valjka V ravninama paralelnim sa y0z i x0z na sitne pesudovaljke Vij. Sada je mij(xi − xi−1) · (yj − yj−1) volumen kvadra upisanog u skup Vij, aMij(xi − xi−1) · (yj − yj−1) volumen kvadra opisanog skupu Vij. Dakle, donja Darbouxovasuma s predstavlja volumen upisanog, a gornja Darbouxova suma S volumen opisanog tjelaskupu V pa na isti nacin kao ranije zakljucujemo da je volumen µ(V ) tijela V odreden sa
µ(V ) =
∫∫I
f(x, y)dxdy. (3)
7.5 Integralne sume funkcije tri varijable. Definicija trostrukogintegrala
Neka je I = I1 × I2 × I3 kvadar, gdje je I1 = [a1, b1], I2 = [a2, b2] i I3 = [a3, b3]. Neka su
a1 = x0 < x1 < · · · < xn = b1,
a2 = y0 < y1 < · · · < ym = b2,
a3 = z0 < z1 < · · · < zp = b3
subdivizije segmenata I1, I2 i I3. Za svaku trojku [xi−1, xi], [yj−1, yj], [zk−1, zk] potpunoje odreden mali kvadar
Iijk = [xi−1, xi]× [yj−1, yj]× [zk−1, zk].
80

Neka je funkcija f : I → R ogranicena na I tj. postoje α, β ∈ R takvi da je f(I) ⊆ [α, β].Neka je
mijk = infIijk
f(x, y, z) ,Mijk = supIijk
f(x, y, z)
i neka je (si, ti, uk) bilo koja tocka iz Iijk. Sume
s =n∑i=1
m∑j=1
p∑k=1
mijkµ(Iijk), donja Darbouxova suma
S =n∑
i=∞
m∑j=1
p∑k=1
Mijkµ(Iijk), gornja Darbouxova suma
ϑ =n∑
i=∞
m∑j=1
p∑k=1
f(si, ti, nk)µ(Iijk), integralna (Darbouxova) suma.
Ovdje je µ(Iijk) volumen kvadra Iijk, tj.
µ(Iijk) = (xi − xi−1) · (yj − yj−1) · (uk − uk−1).
Sa A oznacimo skup svih donjih, sa B skup svih gornjih Darbouxovih suma funkcije f kojese dobiju za sve moguce subdiviziuje segmenata I1, I2, I3. Ako je
supA = inf B
kazemo da funkcija f je R-integrabilna na I i broj
I(f ; I) =
∫∫∫I
f(x, y, z)dxdydz = supA = inf B (4)
zovemo trostrukim integralom funkcijef na I. Oznake su∫∫∫I
f(x, y, z)dxdydz =
∫ b1
a1
∫ b2
a2
∫ b3
a3
f(x, y, z)dxdydz.
Svojstva trostrukog integrala su ista kao dvostrukog. Tako za ogranicenu funkciju f na I(f(I) ⊆ [α, β]) vrijedi
αµ(I) ≤∫∫∫
I
f(x, y, z)dxdydz ≤ βµ(I),
gdje je µ(I) volumen kvadra I.Ako je V ogranicen podskup od R3 i f : V → R ogranicena funkcija na V , onda postoji
kvadar I koji sadrzi V . Sada funkciju f prosirimo do fukcije∼f : I → R tako da stavimo
∼f(x, y, z)
{f(x, y, z) , (x, y, z) ∈ V0 , (x, y, z) /∈ V.
81

Ako je∼f integrabilna na I onda po definiciji stavljamo∫∫∫
V
f(x, y, z)dxdydz =
∫∫∫I
∼f(x, y, z)dxdydz (5)
i taj integral zovemo integralan funkcije f po skupu V .
7.6 Izracunavanje trostrukog integrala
Trostruki integral se izracunava tako da se svodi na jednostruki. Imamo nekoliko jednos-tavnih podrucja integracije.
1/ Neka je podrucje integracije kvadar I = [a1, b1]× [a2, b2]× [a3, b3]. Tada vrijedi
∫∫∫I
(x, y, z)dxdydz =
∫ b1
a1
(∫∫I2×I3
f(x, y, z)dydz)dx (1)
=
∫ b2
a2
(∫∫I1×I3
f(x, y, z)dxdz)dy (2)
=
∫ b3
a3
(∫∫I1×I2
f(x, y, z)dxdy)dz. (3)
Ako je jos f(x, y, z) = f1(x) · f2(y) · f3(z) tada vrijedi
∫∫∫I
f(x, y, z)dxdydz =(∫ b1
a1
f1(x)dx)·(∫ b2
a2
f2(y)dy)·(∫ b3
a3
f3(z)dz). (4)
Primjer 1. Izracunati integral funkcije f(x, y, z) = x3y+ z2 po podrucju integracijeI = [−1, 1]× [0, 3]× [0, 2].
∫∫∫I
f(x, y, z)dxdydz =
∫ 1
−1
( ∫∫[0,3]×[0,2]
(x3y + z2)dydz)dx =
=
∫ 1
−1
dx
∫ 3
0
dy
∫ 2
0
(x3y + z2)dz =
∫ 1
−1
dx
∫ 3
0
dy(2x3y +8
3) =
=
∫ 1
−1
dx(9x3 + 8) = (9x4
4+ 8x)|1−1 = 16.
82

2/ Pretpostavimo da postoji skup D ⊂ R2 i funkcije g1, g2 : D → R takve da je
g1(x, y) ≤ g2(x, y) , (x, y) ∈ D
i da je podrucje integracije odredeno sa
V = {(x, y, z)|(x, y) ∈ D, g1(x, y) ≤ z ≤ g2(x, y)},
tj skup V po kome integriramo zatvoren je izmedu dvije plohe. To pokazuje da svakaparalela sa z− osi sijece rub skupa V najvise u dvije tocke. Sada je
∫∫∫V
f(x, y, z)dxdydz =
∫∫D
(∫ g2(x,y)
g1(x,y)
f(x, y, z)dz)dxdy. (5)
Ako jos postoje funkcije h1, h2 : [a, b]→ R takve da je
h1(x) ≤ h2(x) , x ∈ [a, b]
i da vrijediD = {(x, y)| x ∈ [a, b] , h1(x) ≤ y ≤ h2(x)},
onda je
∫∫∫V
f(x, y, z)dxdydz =
∫ b
a
dx
∫ h2(x)
h1(x)
dy
∫ g2(x,y)
g1(x,y)
f(x, y, z)dz. (6)
Prvo se integrira po z, pa po y i na kraju po x. Slicno se postupa ako svaka paralelasa x−osi sijece rub od V najvise u dvije tocke, tj. svaka paralela sa y−osi sijece rubod V najvise u dvije tocke. Uvijek, opcenito skup V treba rastaviti na takve skupove.Ako je f(x, y, z) = 1 za (x, y, z) ∈ V onda iz (5) slijedi da je
∫∫∫V
f(x, y, z)dxdydz
volumen dijela valjka izmedu ploha z = g1(x, y) i z = g2(x, y) nad D. Posebno je
µ(V ) =
∫∫∫V
dxdydz (7)
volumen svakog tijela V ⊂ R3 (koji ima volumen).
Primjer 2. Izracunati ∫∫∫V
(x+ y + z + 1)−3dxdydz
po skupu V koji je ogranicen koordinatnim ravninama i ravninom x+ y + z = 1 (Slika 1.).
83

Slika 1.
∫∫∫V
(x+ y + z)−3dxdydz =
∫ 1
0
dx
∫ 1−x
0
dy
∫ 1−x−y
0
(x+ y + z + 1)−3dz
=
∫ 1
0
dx
∫ 1−x
0
dy[ −1
2(x+ y + z + 1)2|1−x−y0
]=
∫ 1
0
dx
∫ 1−x
0
dy[− 1
8+
1
2(x+ y + 1)2
]=
∫ 1
0
dx[− 1
8(1− x)− 1
2(x+ y + 1)|1−x0
]=
∫ 1
0
dx[− 1
8(1− x)− 1
4+
1
2(x+ 1)
]=
1
2ln 2− 5
16.
84




![Pf [Skripta] 144 Str](https://img.pdfslide.tips/doc/110x75/55721431497959fc0b93fb70/pf-skripta-144-str.jpg)
























