Embed Size (px)
DESCRIPTION
Apostila de Séries Temporais
Citation preview

Series Temporais
MAURICIO ZEVALLOS
Universidade Estadual de Campinas
Departmento de Estatıstica, UNICAMP, Brasil
Copyright ©2013

Sumario
1 Introducao 1
1.1 Series Temporais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Caracterısticas Empıricas . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Modelos Simples de Tendencia e Sazonalidade 3
2.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Modelos de Regressao . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3 Transformacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.4 Suavizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.5 Notas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3 Processos Estacionarios 11
3.1 Definicoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.2 Inferencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.3 Funcao de Autocorrelacao Parcial . . . . . . . . . . . . . . . . . . . . 183.4 Processos Lineares e Teorema de Wold . . . . . . . . . . . . . . . . . 20
4 Modelos ARMA 25
4.1 Procesos de Medias Moveis . . . . . . . . . . . . . . . . . . . . . . . . 254.2 Processos Autoregresivos . . . . . . . . . . . . . . . . . . . . . . . . . 284.3 Processos ARMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.4 Estrutura de Dependencia nos processos ARMA . . . . . . . . . . . . 344.5 Notas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5 Modelagem ARMA 36
5.1 Analise Exploratoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.2 Identificacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.3 Estimacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.4 Diagnostico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.5 Selecao de Modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.6 Aplicacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6 Modelos ARIMA e SARIMA 40
6.1 Modelos ARMA Integrados . . . . . . . . . . . . . . . . . . . . . . . . 406.2 Modelos SARIMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436.3 Construcao do Modelo SARIMA . . . . . . . . . . . . . . . . . . . . . . 47
ii

Series Temporais Mauricio Zevallos ©2013
7 Previsao 50
7.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 507.2 Previsao em Processos Autoregressivos . . . . . . . . . . . . . . . . . 507.3 Previsao em Processos de Media Movel e ARMA . . . . . . . . . . . . 507.4 Previsao com amostra infinita em processos estacionarios . . . . . . 507.5 Previsao em Processos ARIMA e SARIMA . . . . . . . . . . . . . . . . . 517.6 Comportamento a longo prazo . . . . . . . . . . . . . . . . . . . . . . 517.7 Criterios para comparar modelos em termos de previsoes . . . . . . 52
iii

Capıtulo 1
Introducao
1.1 Series Temporais
Informalmente, uma serie temporal e uma colecao de observacoes que possuemuma sequencia no tempo.
Notacao: y1, . . . , yn
Exemplo 1.1 Alguns exemplos de series temporais
• Temperatura media diaria na cidade de Campinas
• Retornos mensais do Ibovespa
• SOI: Southern Oscillation Index
A caracterıstica principal das series temporais e a dependencia entre asobservacoes. Portanto, na analise estatıstica e necessario considerar a ordem naqual os dados foram coletados. Como consequencia da dependencia podemos fazerprevisoes dos valores futuros a partir dos valores passados.
A abordagem consiste em considerar a serie temporal observada como umarealizacao de um processo estocastico.
Nesta disciplina estudaremos series coletadas em tempos igualmente espacados,em segundos, minutos, dias, anos, etc.
1.1.1 Objetivos
Os principais objetivos na Analise de Series Temporais sao,
• Analise e interpretacao: encontrar um modelo para descrever a dependenciatemporal nos dados. Algumas vezes podemos interpretar o modelo.
1

Series Temporais Mauricio Zevallos ©2013
• Previsao: dada uma serie, prever um ou varios valores futuros da serie.
• Estimacao ou extracao do sinal.
1.2 Caracterısticas Empıricas
1.2.1 Tendencia
• Evolucao a longo praco do nıvel medio
• Componente suave, nao oscilatoria (intrinsicamente)
• Pode ser linear, quadratica, nao linear, etc.
1.2.2 Sazonalidade
• Flutuacoes cıclicas relacionadas com o calendario.
• Padrao regular anual. Por exemplo se temos dados trimestrais, o comporta-mento dos trimestres e similar em cada ano.
• Padrao regular diario. Por exemplo se temos dados horarios e o comporta-mento e similar em cada dia.
• Nao existe uma definicao precisa de sazonalidade. Uma elas e: efeito (desvio)com relacao a tendencia.
1.2.3 Ciclos
• Outro tipo de periodicidades.
• Exemplos: ciclos economicos (boom e recessoes cada 7 anos), periodicidadede El Nino (cada ? anos) .
1.2.4 Valores aberrantes ou outliers
• Observacoes atıpicas fora do padrao da serie.
• E muito importante sua detecao, pois estes valores podem ter um efeitoimportante na analise estatıstica, inferencia e previsao.
• Estas observacoes devem ser estudadas mas nao retiradas.
1.2.5 Mudanca Estrutural (de Regime)
• Acontece quando a estrutura ou comportamento da serie muda de um periodoa outro.
2

Capıtulo 2
Modelos Simples de
Tendencia e Sazonalidade
2.1 Introducao
Seja y1, . . . , yn uma serie temporal. O Modelo de Decomposicao Aditivo consiste emescrever yt como a soma de tres componentes nao observaveis,
yt = Tt + St +Ct + εt (2.1)
onde Tt e a tendencia, St e a sazonalidade, Ct sao os ciclos e εt sao as perturbacoesou ruido. Assume-se que εt em um processo com E(εt) = 0, V ar(εt) = σ2 constante.Essas perturbacoes podem ser independentes, mas em geral nas aplicacoes comseries temporais sao consideradas como um processo estacionario.
Outro modelo e o Modelo de Decomposicao Multiplicativo no qual,
yt = Tt × St ×Ct × εt (2.2)
Neste capitulo sera estudada a modelagem de serie temporais via modelos deregressao. Para isto serao consideradas primeiro especificacoes deterministicassimples como polinomios e funcoes periodicas como os harmonicos. Posteriormentediscutiremos metodos nao parametricos de suavizacao para estimar as componentes.
As componentes ( por exemplo tendencia e sazonalidade) sao, em geral, bastanterelacionadas. Como anota Pierce (1979),
1. A especificacao de St depende da especificacao de Tt
2. Metodos de estimacao de St podem ser bastante afetados se nao levarmos emconta a tendencia.
Portanto a estimacao de uma componente afeta a estimacao das outras.
3

Series Temporais Mauricio Zevallos ©2013
Um dos objetivos principais na analise de Series Temporais e o Ajustamento Sazonal,isto e retirar a sazonalidade da serie. Assim, nos modelos aditivos queremoscalcular
Y ?t = Yt − St , (2.3)
onde St e uma estimativa de St, e nos modelos multiplicativos interessa
Y ?t = Yt/St , (2.4)
2.2 Modelos de Regressao
Inicialmente, no modelo (2.1) supomos que nao ha componente sazonal. Isto e,
Yt = Tt + εt (2.5)
Uma forma simples de modelar a tendencia e a traves de polinomios,
Tt = β0 + β1t + . . .+ βptp (2.6)
e um metodo de estimacao e Quadrados Minimos. Como determinar p? (de formageral, como comparar modelos?)
1. Por tentativa e erro (uma forma exploratoria e comprovando graficamenteque a tendencia foi retirada)
2. Testes de hipoteses
3. R2 ajustado, criterios AIC,BIC
Outras especificacoes alternativas sao as funcoes nao lineares em t, como por exemploa exponencial. Nestas situacoes a estimacao e realizada usando metodos numericos.
Exemplo 2.1 GNP USA
Agora, vamos supor que trabalhamos com o modelo que possui somente sazonali-dade,
Yt = µ+ St + εt . (2.7)
Supondo que temos dados trimestrais, uma forma simples de especificar a sazonal-idade e
St = δi t ∈ i-esimo trimestre, i = 1,2,3,4 (2.8)
onde
δ1 + δ2 + δ3 + δ4 = 0. (2.9)
4

Series Temporais Mauricio Zevallos ©2013
Desta forma a sazonalidade e o desvıo com relacao a media. Para estimar oscoeficientes δi , alguem poderia propor faze-lo via o modelo de regressao comvariaveis dummy,
yt = µ+ δ1D1t + δ2D2t + δ3D3t + δ4D4t + εt (2.10)
onde Dit = 1 se t ∈ trimestre i e zero em outro caso e εt e uma sequencia deperturbacoes. Este e um caso particular de Y = Xβ + ε, e nesse caso, o estimador dequadrados minimos de β e
β = (X ′X)−1X ′Y . (2.11)
Acontece que a matriz X ′X e nao inversıvel. Portanto e necessario introduziralguma restricao. Para efeitos de manter a interpretacao de sazonalidade, consider-amos a restricao (2.9).
Por exemplo considere δ4 = −(δ1 + δ2 + δ3). Neste caso, o modelo (2.10) pode serescrito como
yt = µ+ δ1(D1t −D4t) + δ2(D2t −D4t) + δ3(D3t −D4t) + εt (2.12)
Entao via regressao obtemos as estimativas δ1, δ2, δ3 e δ4 e estimado como −(δ1 +δ2 + δ3).
Quando a serie apresenta tendencia linear e sazonalidade, como por exemplo nasvendas de cerveja, um modelo candidato e yt = Tt + St + εt com
Tt = β0 + β1t, (2.13)
St = δ1(D1t −D4t) + δ2(D2t −D4t) + δ3(D3t −D4t) (2.14)
Desta forma mantemos a interpretacao de sazonalidade como desvıo em relacao atendencia.
Exemplo 2.2 Vendas de Cerveja
2.2.1 Regressao Harmonica
• Serve para a modelagem de sazonalidades ou outro tipo de comportamentoscıclicos (periodicidades)
• Seja St uma componente ciclica ou sazonal. A ideia basica da regressaoharmonica e definir
St = Asin(2πνt +φ) (2.15)
= asin(2πνt) + bcos(2πνt) (2.16)
onde A e a amplitude, φ e a fase, ν e a frequencia: ciclos por unidade de tempoe P = 1/ν e o ciclo
5

Series Temporais Mauricio Zevallos ©2013
Exemplo 2.3 Vendas de cerveja. A serie de vendas trimestrais de cerveja ap-resenta um comportamento sazonal cada 4 trimestres. Portanto o ciclo e de 4trimestres P = 4, e ν = 1/4 (un ciclo cada 4 trimestres). Segundo o discutidoanteriormente, um modelo plausıvel e
yt = β0 + β1t + β2 sin(2πνt) + β3 cos(2πνt) + εt
• Quando ha k periodicidades com frequencias: ν1, . . . ,νk
St =k∑j=1
{aj sin(2πνjt) + bj cos(2πνjt)
}(2.17)
Exemplo 2.4 El Nino. A serie de dados mensais de SOI (mudancas na pressaodo ar, relacionadas com temperatura na superficie do mar no oceano Pacifico)apresenta comportamento cıclico com duas periodicidades:
– Ciclo sazonal anual: ν1 = 1/12, P1 = 12
– El Nino: esquentamento cada 6 anos, ν2 = 1/72, P1 = 72
Entao um modelo candidato e
yt = β0 + β1t + β2 sin(2πt/12) + β3 cos(2πt/12) (2.18)
+ β4 sin(2πt/72) + β5 cos(2πt/72) + εt .
• Modelagem
– Especificacao: primeiro determinamos as frequencias νj . Uma das ferra-mentas para fazer isto e o periodograma.
– Estimacao: os parametros βj sao estimados por quadrados mınimos.Quando as frequencias sao variaveis aleatorias temos um problema deotimizacao nao-linear.
2.2.2 Acerca da significancia dos coeficientes
Com dados de series temporais, apos a tendencia e sazonalidade sao estimadas viaminimos quadrados, os resıduos apresentam dependencia. Neste caso, embora osestimadores sejam nao-viciados e consistentes, os erros padroes dos coeficientesnao sao corretos. Em consequencia, a significancia dos coeficientes poderia ficarcomprometida. Por exemplo, poderiamos obter significancia quando ao ha eviceversa. No Capitulo dos Modelos ARMA estudaremos como contornar esteproblema.
6

Series Temporais Mauricio Zevallos ©2013
2.3 Transformacoes
• Sao uteis para: (i) estabilizar a variabilidade e ou (ii) simetrizar a distribuicao.1
• Uma transformacao frequentemente utilizada, por exemplo em Economiae Financas (em indices), e a transformacao logaritmica. Em particular, estapermite tornar modelos multiplicativos em modelos aditivos. Com efeito,
Yt = Tt × St ×Ct × εt (2.19)
ln(Yt) = ln(Tt) + ln(St) + ln(Ct) + ln(εt) (2.20)
Note que transformacao logaritmica somente pode ser aplicada a valorespositivos.
• Considere a serie temporal y1, . . . , yn e vamos supor que achamos razoavelo modelo 2.19. Adicionalmente, vamos supor que as componentes sao esti-madas em 2.20, por exemplo via regressao. Seja xt = �ln(Yt) o valor ajustadoe et os resıduos. Para obter a estimacao da serie na escala original um esti-mador natural e exp(xt) mas este e viesado. Assim, e conveniente fazer umacorrecao a esta estimativa, multiplicando-a por um fator c. Se supormos quea distribuicao de ln(εt) e N (0,σ2) entao εt = exp(ln(εt)) possui distribuicaolog-normal com valor esperado exp(σ2/2). Entao o fator de correcao e iguala c = exp(σ2/2) onde σ e o desvıo padrao dos resıduos et. No entanto, nasaplicacoes empiricas tem-se encontrado que a distribuicao dos resıduos e as-simetrica a esquerda. Nesses casos podemos usar c = 1
n
∑ni=1 exp(et). Quando
os valores ajustados sao muito proximos dos valores reais, o efeito do termode correcao pode ser minimo.
• Uma famılia de transformacoes usualmente utilizada e a de Box-Cox. Assim,seja Zt a serie transformada,
Zt ={yλt se λ , 0ln(yt) se λ = 0
Exemplos incluem λ = 0 para modelos multiplicativos e λ = 0.5 para dadosde contagem.
Na pratica, o coeficiente λ e encontrado seja de forma exploratoria, ou mini-mizando uma funcao objetivo.
Exemplo 2.5 Vendas de passagens.
1Tambem para tornar a serie estacionaria. O conceito de estacionariedade sera visto no proximocapitulo.
7

Series Temporais Mauricio Zevallos ©2013
2.4 Suavizacao
Em series temporais com tendencia e ou sazonalidade que mudam no tempo osmodelos polinomias para a tendencia poderiam nao capturar os comportamentoslocais. Uma vantagen dos metodos de suavizacao e que sao mais flexıveis paracapturar esses comportamentos. No entanto, uma desvantagen dos metodos desuavizacao descritos a seguir e que nao permitem fazer previsoes.
Sejam y1, . . . , yn observacoes de uma serie temporal e assumimos que,
yt =mt + εt (2.21)
onde mt e o sinal e εt e o ruido. A ideia da suavizacao e que o sinal (a tendencia e ousazonalidade e ou ciclos) num instante t sera estimado usando-se as observacoes Yscom s ao redor de t. Isto e numa janela ao redor de t.
Existem varios metodos de suavizacao. Um dos mais utilizados e o metodo dasMedias Moveis. Neste metodo, o sinal no tempo t e estimado como a media ponder-ada das observacoes na vizinhanca. Assim,
mt =k∑
j=−kcjyt+j , t = k + 1, . . . ,n− k (2.22)
onde os pesos cj satisfazem∑kj=−k cj = 1. Observe que perdemos k observacoes
tanto no inıcio quanto no final. Se supormos que cada observacao tem igual pesona suavizacao entao
mt =1
2k + 1
k∑j=−k
yt+j , t = k + 1, . . . ,n− k (2.23)
Como determinar k? Na pratica sao feitas suavizacoes para varios valores de k edepois escolhemos aquele valor que produca a suavizacao desejada (graficamente).As vezes a natureza dos dados ajuda. Por exemplo, com dados trimestrais esazonalidade anual seria razoavel usar uma janela com 4 observacoes. Mas, nessecaso qual seria o valor de k? Isto e, se por exemplo quisermos estimarm7, usariamosy5, y6, y7, y8 ou y6, y7, y8, y9? Uma forma de contornar este problema e considerark = 2 onde
mt = (0.5yt−2 + yt−1 + yt + yt+1 + 0.5yt+2)/4 t = 3, . . . ,n− 2 (2.24)
2.4.1 Um Metodo Simples de Decomposicao
Assuma o modelo de decomposicao com tendencia e sazonalidade
yt = Tt + St + εt (2.25)
8

Series Temporais Mauricio Zevallos ©2013
Um metodo simples de decomposicao consiste no seguinte: vamos supor quetemos dados trimestrais com sazonalidade anual. Entao, a tendencia e estimadaa traves de medias moveis como em (2.24). Para estimar a sazonalidade, definidacomo (2.8), primeiro remova a tendencia da serie, at = yt − Tt e depois calcule amedia correspondente a cada trimestre. Assim, para o trimestre I , bI e a mediade a1, a5, a9, . . ., enquanto que para o trimestre II bII e a media de a2, a6, a10, . . .,etc. Para que a sazonalidade seja o desvio em torno da tendencia, calculamosb = (bI + bII + bIII + bIV )/4 e consideramos δi = bi − b para i = 1,2,3,4. Desta formaa sazonalidade estimada e igual a St = δi se t pertence ao trimestre i. Finalmente, acomponente irregular estimada e εt = yt − Tt − St.
Quando o modelo e multiplicativo,
yt = Tt × St × εt (2.26)
o processo de estimacao e similar ao realizado no modelo aditivo: a tendencia eestimada da mesma forma, mas para estimar a sazonalidade consideramos at =yt/Tt e a componente irregular estimada e εt = yt/(TtSt).
No R o comando decompose faz a decomposicao descrita.
Exemplo 2.6 Vendas de cerveja. A serie de vendas trimestrais de cerveja apresentaum comportamento sazonal cada 4 trimestres.
2.5 Notas
2.5.1 Criterios de Escolha de Modelos
Seja um modelo de regressao com k coeficientes com σ2k = SQE/n o estimador de
maxima verossimilhanca de V ar(εt) = σ2, sendo n o numero de dados.
Na comparacao de modelos com diferente numero de coeficientes podemos usar osseguintes Criterios de Informacao,
• Akaike,
AIC = ln(σ2k ) +
2k +nn
• Schwarz,
BIC = ln(σ2k ) +
k ln(n)n
Escolhemos o modelo com menor AIC e ou BIC. E preferıvel usar o BIC. Lembreque o modelo escolhido poderia nao ser adequado.
9

Series Temporais Mauricio Zevallos ©2013
2.5.2 Outros metodos de suavizacao
Medianas Moveis
Em vez de tomar medias moveis podemos calcular medianas moveis. Assim,
mt =mediana{yt−k , yt−k+1, . . . , yt+k}, t = k + 1, . . . ,n− k (2.27)
Comparado com o metodo das medias moveis, o metodo das medianas moveis econveniente quando queremos estimar o sinal na presenca de outliers.
Lowess
Este e o acronimo de locally weighted regression scatter plot smoothing. O procedi-mento para estimar o sinal no tempo ti , mti , e
1. Identifique os pontos vizinhos ou janela de pontos ao redor dos tempos i,A(ti) = {ti−k , . . . , ti−1, ti , ti+1, . . . ti+k},
2. Calcule ∆(ti) = maxj∈A(ti ) |tj − ti | e defina aj = |ti − tj |/∆(ti) para todo tj ∈ A(ti)
3. Calcule os pesos pj = ω(aj ) onde ω(·) e uma funcao de pesos. Escolhas usuaispara esta funcao sao,
ω(u) = (1− |u|3)3, |u| < 1, (2.28)
ω(u) = (1− |u|2)2, |u| < 1, (2.29)
e zero em caso contrario (para ambas especificacoes).
4. A estimativa do sinal mti e,
mti = αi + βiti (2.30)
onde os coeficientes αi e βi sao estimados via Quadrados Minimos Ponderados(QMP), isto e, temos que minimizar∑
j∈A(ti )
pj(ytj −αi − βitj )2, (2.31)
5. Repetimos este procedimento para i = 1, . . . ,n
Assim, a estimativa do sinal em cada ponto e o ajuste de uma regressao linear depontos vizinhos os quais possuem pesos determinados pela funcao ω(·). Note queessa funcao e simetrica ao redor de zero e os valores diminuem na medida que seafastam de zero. Em consequencia, as observacoes mais afastadas do tempo ti teminfluencia menor na estimativa do sinal mti .
10

Capıtulo 3
Processos Estacionarios
3.1 Definicoes
Definicao 3.1 Um processo estocastico e uma familia de variaveis aleatorias {Yt; t ∈C}.
Se C = [0,∞) o processo e de Tempo continuo,
Se C = {1,2, . . . , } o processo e de Tempo discreto.
Definicao 3.2 Uma serie temporal e uma realizacao de um processo estocastico, istoe, corresponde a ocorrencia de um dos possiveis resultados .
O processo estocastico mais simples e a sequencia de variaveis aleatorias inde-pendentes identicamente distribuidas (IID) com valor esperado zero e varianciaconstante σ2. Havendo independencia, este processo nao seria de interesse naanalise de series temporais, mas acontece que muitos dos processos utilisados napratica podem ser construidos a partir do ruido branco.
Exemplo 3.1 Paseio ao Acaso. Sejam ε1, ε2, . . . v.a. IID con esperanca cero e varianciaσ2. O processo passeio ao acaso {Yt} e definido como
Yt =t∑i=1
εi (3.1)
= Yt−1 + εt (3.2)
Definicao 3.3 A distribuicao conjunta (finita) do processo estocastico esta dada por:
Ft(y) = P (Yt1 ≤ y1, . . . ,Ytn ≤ yn), y = (y1, . . . , yn) (3.3)
onde t = (t1, . . . , tn). No caso que F seja Normal Multivariada dizemos que o processo eGaussiano.
11

Series Temporais Mauricio Zevallos ©2013
Para analizar a dependencia utilizamos as covariancias
Definicao 3.4 Seja {Yt , t ∈ T } um processo estocastico tal que V ar(Yt) <∞. Entao acovariancia entre Yr e Ys esta definida como
Cov(Yr ,Ys) = E[(Yr −E(Yr ))(Ys −E(Ys))], r, s ∈ T (3.4)
Exemplo 3.2 Paseio ao Acaso (cont.)
Nas aplicacoes, como poderiamos estimar a estrutura de dependencia, vamos suporde correlacao, com base em uma realizacao do processo estocastico? Neste sentido,e conveniente trabalhar com a seguinte classe de processos
Definicao 3.5 O processo {Yt} denomina-se estacionario (covariante estacionarioou estacionario de segunda ordem) se
a) E(Yt) e uma constante para todo t.
b) V ar(Yt) e uma constante para todo t.
c) Cov(Yt ,Yt+τ ) e uma funcao somente de τ .
Exemplo 3.3 . Sejam Y1,Y2,Y3,Y4 pertencentes a um processo estacionario. Entao,
Cov(Y1,Y2) = Cov(Y2,Y3) = Cov(Y3,Y4) = γ(1)
Cov(Y1,Y3) = Cov(Y2,Y4) = γ(2)
Cov(Y1,Y4) = γ(3)
Exemplo 3.4 Processo Singular. Seja Yt o processo definido como
Yt = ε1 cos(θt) + ε2 sin(θt) (3.5)
onde θ ∈ [−π,π] e una constante e ε1, ε2 sao variaveis aleatorias nao-correlacionadascom esperanca zero e variancia um.
Como E(Yt) = 0, V ar(Yt) = 1 e Cov(Yr ,Ys) = cos[θ(r − s)] entao {Yt} e um processoestacionario.
Quando nao sao satisfeitas as condicoes da Definicao 3.5 dizemos que o processoe nao-estacionario. Um exemplo de processo nao estacionario e o Passeio aoAcaso. Os modelos com tendencia discutidos no capitulo anterior sao exemplosde processos nao estacionarios. Grande parte das series economicas e de outrasareas sao nao estacionarias. Nos capitulos X,Y serao discutidas metodologias paraa modelagem deste tipo de processos.
A partir de agora nos concentraremos no estudo dos processos estacionarios, osquais estao caracterizados pela media e correlacoes (ou covariancias).
12

Series Temporais Mauricio Zevallos ©2013
Definicao 3.6 Seja {Yt} um processo estacionario. Entao
a) γ(τ) e denominada funcao de autocovariancia
b) ρ(τ) = γ(τ)/γ(0) e denominada funcao de autocorrelacao, (FAC).
onde τ e a defasagem ou retardo.
Definicao 3.7 Ruido Branco. O processo {εt} e dito Ruido Branco com esperancazero e variancia σ2 se e somente se E(εt) = 0 e γ(0) = σ2 e γ(k) = 0 para k , 0. Notacaoεt ∼ RB(0,σ2)
Definicao 3.8 Ruido Branco Estrito. Se o processo {εt} e um ruido branco onde asvariaveis aleatorias sao mutuamente independentes entao e dito um Ruido BrancoEstrito. Adicionalmente, usualmente e considerado que as variaveis possuem a mesmadistribuicao. Neste texto consideramos um Ruido Branco Estrito como uma sequencia dev.a. IID com valor esperado zero e variancia constante.
Exemplo 3.5 Cont. Exemplo 3.4. Neste caso, ρ(τ) = cos(θτ). Vamos supor queθ = π/2, entao ρ(k) = 0 para k impar, ρ(2k) = (−1)k para k par. A FAC e (desenho).
Exemplo 3.6 Processo MA(1). Seja o processo Yt = εt +θεt−1 onde {εt} ∼ RB(0,σ2).Entao E(Yt) = 0, γ(0) = σ2(1 +θ2), γ(1) = θ/(1 +θ2) e γ(k) = 0 para k ≥ 2.
Exemplo 3.7 Processo AR(1). Seja o processo Yt = φYt−1 + εt onde {εt} ∼ RB(0,σ2) e|φ| < 1. Como sera demonstrado no proximo capıtulo, o processo {Yt} e estacionario comE(Yt) = 0, γ(0) = σ2/(1−φ2) e ρ(k) = φk para k ≥ 1.
As funcoes de autocovariancia e de autocorrelacao satisfazem as seguintes pro-priedades.
Proposicao 3.1 Seja Yt um processo estacionario, entao
a) γ(0) ≥ 0
b) | γ(h) |≤ γ(0), para todo h. Entao | ρ(h) |≤ 1.
c) γ(h) = γ(−h), para todo h. Entao ρ(h) = ρ(−h).
d) γ(h) e uma funcao semidefinida positiva, isto e, para todo a = (a1, . . . , an) e paratodo y = (y1, . . . , yn)
n∑i=1
n∑j=1
aiajγ(|i − j |) ≥ 0
Demonstracao. Partes (a) e (c) sao obvias. Parte (b) e uma consequencia da desigual-dade de Cauchy-Schwarz. Para a Parte (d) note que 0 ≤ V ar(a>y) = a>V ar(y)a,onde V ar(y) e uma matriz com elementos γ(|i − j |).
13

Series Temporais Mauricio Zevallos ©2013
3.2 Inferencia
Consideremos que os dados y1, . . . , yn provem de um processo estacionario. Napratica, a media µ e as covariancias γ(τ) tem que ser estimadas. Para fazer istouma alternativa e utilizar os estimadores de momentos.
Definicao 3.9 Seja {Yt} uma serie temporal. Entao
a) Y =∑ni=1Yi/n e a media amostral.
b) ck =∑n−ki=1 (Yi − Y )(Yi+k − Y )/n e a autocovariancia amostral
c) rk = ck/c0 e a autocorrelacao amostral
O grafico de rk versus k se denomina correolograma ou grafico da funcao deautocorrelacao amostral. Note que nao podemos calcular a FAC amostral paraquaisquer defasagem. De fato, se temos n dados so dispomos de (n − 1) pares(Yi ,Yi+1) e de um par (Yn,Yn−1). Alem disso, com puocos pares as estimacoes naosao precissas. Portanto temos regras como: nao avaliar rk para k > n/3, ou segundoBox-Jenkins considerar k ≤ n/4 com pelo menos n = 50 observacoes, ou avaliar parak ≤√n.
No R a funcao acf calcula a FAC de uma serie. Por defeito considera X defasagens.Na analise e necessario que voce considere o numero de defasagens de acordo como tamanho da serie segundo as recomendacoes anteriores.
Exemplo 3.8 Em uma serie temporal com 84 observacoes sao calculadas as seguintesautocorrelacoes:O grafico da FAC e.
k 1 2 3 4 5 6 7 8 9 10rk -0.67 0.43 -0.24 0.09 0.04 -0.12 0.14 -0.09 0.04 0.09
As autocovariancias e autocorrelacoes amostrais podem ser calculadas para qual-quer conjunto de dados y1, . . . , yn, nao somente para observacoes provenientes deprocesos estacionarios. Mesmos que a FAC nao tenha interpretacao para proces-sos nao estacionarios, a FAC fornece informacao muito valiosa para entender aestrutura de dependencia da serie, por exemplo para identificar tendencia e ousazonalidade.
Exemplo 3.9
14

Series Temporais Mauricio Zevallos ©2013
3.2.1 Propriedades dos estimadores
A seguir apresentamos algumas propriedades destos estimadores. Comecamospela media amostral
Proposicao 3.2 A media amostral Y satisfaz as seguientes propriedades:
a) E um estimador nao viciado de µ
b) Sua variancia e,
V ar(Y ) =γ(0)n
+n−1∑k=1
2(n− k)n2 γ(k) (3.6)
=γ(0)n
1 +n−1∑k=1
2(n− k)n
ρ(k)
(3.7)
onde FIV = 1 +∑n−1k=1
2(n−k)n ρ(k) e o Fator de Inflacao da Variancia.
c) Se γ(n)→ 0 entao V ar(Y )→ 0
d) Se∑k=∞k=−∞ |γ(k)| <∞ entao nV ar(Y )→
∑k=∞k=−∞γ(k)
De (b) temos que se nao consideramos a dependencia a variancia da media nao eestimada acuradamente.
Exemplo 3.10 Cont. Exemplo 3.6 Neste caso
FIV = 1 + 2n− 1n
θ
1 +θ2
Por exemplo se n = 100 e θ = 0.8 entao FIV = 1.966. Isto e, a variancia e quase 2 vezesa variancia supondo independencia!
Se quisermos encontrar intervalos de confianca para µ podemos trabalhar coma distribuicao assintotica de Y . Sob determinadas condicoes esta distribuicao enormal, veja por exemplo Brockwell and Davis (1991).
Com respeito as propriedades de ck , sob determinadas condicoes,
E(ck) ≈(1− k
n
)γ(k)−
(1− k
n
)V ar(Y ). (3.8)
Portanto ck apresenta vies. Mas, se V ar(Y )→ 0 quando n→∞ (o qual acontecepara varias classes de processos) e se k/n e pequeno entao o vies e pequeno. Pelocontrario, fixo n, se k for muito proximo de n entao o vies pode ser grande. Este e
15

Series Temporais Mauricio Zevallos ©2013
um dos motivos pelos quais e aconselhavel calcular ck para valores de k ≤ n/4 (Weipp 19).
Um estimador alternativo para γ(k) ’e
ck =1
n− k
n−k∑i=1
(Yi − Y )(Yi+k − Y ).
Em geral, este estimador apresenta menor vies do que ck . No entanto, nem sempre esemidefinido positivo, enquanto que ck sim. Por este motivo e sendo ck consistente,preferimos ck .
Sob determinadas condicoes, os estimadores rk sao consistentes. Em geral obtera distribuicao de rk e muito dificil mesmo para modelos simples. Entao temosque recurrir a resultados assintoticos. Sob determinadas condicoes a distribuicaoassintotica do vetor (r1, . . . , rs) e normal multivariada, onde a matriz de covarianciaem geral nao e diagonal. Portanto, haveria correlacao entre ri e rj e esta poderia sergrande. Veja por exemplo Brockwell and Davis (1991) e Harvey (1990). No entanto,ha um caso especial no qual as correlacoes sao assintoticamente independentes.Veja a seguinte proposicao.
Proposicao 3.3 Seja {yt} um ruido branco. Entao sob determinadas condicoes,
(a) Para cada k especifico, rk ∼ AN (0,1/n).
(b) O vetor (r1, . . . , rs) tem distribuicao assintotica normal.
(c) As autocorrelacoes (r1, . . . , rs) sao assintoticamente independentes.
3.2.2 Testes de Ruido Branco
Um problema importante na analise estatıstica de dados e determinar si estesapresentam dependencia. Se os dados fossem independentes, nao teria sentidoaplicar modelos de series temporais. A seguir apresentaremos algumas estrategiaspara avaliar se os dados correspondem a um ruido branco. Estas servem para avaliarausencia de correlacao mas nao necessariamente independencia. O resultado chavee a Proposicao 3.3.
Grafico da FAC com limites + - 2/√n: limites de Bartlett
Na analise exploratoria, um dos principais graficos e a FAC amostral. Da Proposicao3.3, se os dados sao independentes, para uma defasagem fixa k, a distribuicaoassintotica de rk e normal, ρk ∼ AN (0,1/n). Assim, os limites de confianca 95%sao +,−,1.96
√n. Desta forma, no grafico da FAC esperariamos que a maioria das
autocorrelacoes esteja dentro desses limites. Na pratica, no entanto, se os dadossao ruido branco, espera-se que 1 em 20 autocorrelaciones esteja fora dos limites
16

Series Temporais Mauricio Zevallos ©2013
No entanto, e importante enfatizar que, a rigor estamos considerando H0 : ρ(k) = 0para un k especifico. Portanto, na significancia, nao debemos esperar que 5%das autocorrelacoes estejam fora dos limites. Se analizarmos 10 autocorrelacoes,como estas sao independentes com distribuicao normal multivariada, entao aregiao de confianca para as 10 autocorrelacoes e o cubo com limites 2/
√n. Assim,
considerando a hipotese nula H0 : ρ1 = . . . = ρ10 = 0, a significancia seria igual aoproduto das 10 significancias obtidas.
Testes de Portmanteau
Pode acontecer que as autocorrelaciones estimadas sejam individualmente peque-nas mas a soma destas nao ser pequena. Isto nao deveria ocorrer se os dados fossemgerados por um ruido branco. Para docimar H0 : ρ1 = . . . = ρm = 0 conjuntamente,Box e Pierce (197?) propuseram o seguinte teste:
Q(m) = nm∑k=1
r2k . (3.9)
Sob H0 a distribuicao assintotica de Q e χ2(m).
Este resultado esta baseado novamente na Proposicao 3.3. Ja que sob H0,√nrk ∼
AN (0,1) para cada k e alem disso as m autocorrelacoes sao assintoticamente in-dependentes, entao
∑mk=1√nrk tem distribuicao chi-cuadrado com m graus de
liberdade.
Em pequenas amostras, tem sido encontrado que a distribuicao χ2m nao constitui
uma boa aproximacao da distribuicao da estatıstica de Box-Pierce Q(m). Por estemotivo Ljung e Box (1978) modificaram o teste (3.9) como,
Q(m) = n(n+ 2)m∑k=1
r2k /(n− k). (3.10)
que tem distribuicao assintotica χ2(m) sob H0.
Como especificar m?. Por um lado, m nao pode ser pequeno pois interessa avaliarvarias correlacoes. Por outro lado, a medida quem aumenta em relacao ao tamanhoda amostra n, a qualidade da distribuicao aproximada deteriora-se. Entao temosque tomar um valor de compromisso entre significancia (m grande) e poder (mpequeno). Um valor razoavel seria m =
√n, mas nas aplicacoes e conveniente
calcular a estatıstica para varios valores de m.
Exemplo 3.11 A partir de uma serie temporal com 100 observacoes sao calculadas asseguintes autocorrelacoes.
No grafico da FAC vemos que as autocorrelacoes 6 (quase) e 10 estao fora dos limites2/√
100 = 0.2. Assim, nao teriamos evidencia contra a hipotese de nao-correlacao.
17

Series Temporais Mauricio Zevallos ©2013
k 1 2 3 4 5 6 7 8 9 10rk 0.06 -0.12 0.01 -0.10 -0.12 -0.19 0.09 -0.07 0.07 0.27k 11 12 13 14 15 16 17 18 19 20rk 0.10 0.05 0.01 -0.02 -0.10 -0.08 0.09 -0.02 0.00 -0.01
Por outro lado, na seguinte tabela temos os resultados do teste de Portmanteau paradiversos valores de m.
m Q(m) Valor-P4 2.94 0.438 9.84 0.72
12 20.08 0.9316 22.12 0.8620 23.18 0.72
Portanto, nao ha evidencia suficiente para rejeitar a hipotese de ruido branco.
Um grafico bastante util (utilisado no R) e aquele no qual os valores-P da estatısticade teste pormanteau sao graficados para cada valor de m. O comportamento idealseria que nao haja nenhum ponto abaixo da linha de 5%, mas, situacoes aceitaveis(que suportam H0) sao aquelas onde a partir de determinado valor de m os pontosestao alocados acima da reta de 5%.
3.3 Funcao de Autocorrelacao Parcial
A FACP e muito importante na simulacao de processos estacionarios, na Teoria dePrevisao e na identificacao de modelos.
• Seja {Yt} um processo estacionario com valor esperado zero e covarianciasγ(·)
• A Autocorrelacao Parcial de ordem k, denotada por φkk , esta definida como acorrelacao entre Yt+k e Yt que nao e explicada por A = {Yt+1, . . . ,Yt+k−1}. Isto e,a correlacao entre Yt+k e Yt apos retirar a dependencia linear em A.
• Em particular, para k = 1 temos que φkk = ρ(1)
• φkk como funcao de k e a Funcao de Autocorrelacao Parcial (FACP)
3.3.1 Como calcular a FACP?
• A dependencia linear e retirada via previsao
18

Series Temporais Mauricio Zevallos ©2013
• Seja Yt o melhor preditor linear no sentido de media quadratica baseado nainformacao {Yt+1, . . . ,Yt+k−1},
Yt = β1Yt+1 + . . .+ βk−1Yt+k−1 (3.11)
Entao podemos mostrar que,
Yt+k = β1Yt+k−1 + . . .+ βk−1Yt+1 (3.12)
• De acordo com a definicao,
φkk =Corr(Yt − Yt ,Yt+k − Yt+k). (3.13)
• Relacao entre FACP e FAC (Demonstracao em B& D)ρ(0) ρ(1) . . . ρ(k − 1)
ρ(0) . . . ρ(k − 2)...
ρ(0)
φk1φk2...φkk
=
ρ(1)ρ(2)...
ρ(k)
(3.14)
• φkk e obtido ao resolver o sistema anterior. Para isto existem varios metodos.Um deles e a Regra de Cramer,
φkk =
∣∣∣∣∣∣∣∣∣∣∣∣ρ(0) ρ(1) . . . ρ(k − 2) ρ(1)
ρ(0) . . . ρ(k − 3) ρ(2)...
ρ(1) ρ(k)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣ρ(0) ρ(1) . . . ρ(k − 2) ρ(k − 1)
ρ(0) . . . ρ(k − 3) ρ(k − 2)...
ρ(1) ρ(0)
∣∣∣∣∣∣∣∣∣∣∣∣
(3.15)
Note que a matriz no numerador e igual a matriz do demoninador a menosda ultima coluna que e o vetor de correlacoes (do lado direito) de (3.15). Porexemplo,
φ22 =
∣∣∣∣∣ 1 ρ(1)ρ(1) ρ(2)
∣∣∣∣∣∣∣∣∣∣ 1 ρ(1)ρ(1) 1
∣∣∣∣∣ (3.16)
• Exemplo: no Ruido Branco, φkk = 1 quando k = 0 e zero em outro caso. Istopode ser comprovado a partir de (3.13) onde Yt = Yt+k = 0 ou a partir de(3.15).
19

Series Temporais Mauricio Zevallos ©2013
• A menos de processos simples, como o Ruido Branco, resolver o sistema (3.14)mediante a regra de Cramer nao e computacionalmente conveniente. Paracontornar esse problema, Durbin(1960) propus o seguinte algoritmo iterativo(chamado de Durbin-Levinson).
φk+1,k+1 =ρ(k + 1)−
∑kj=1φkjρ(k + 1− j)
1−∑kj=1φkjρ(j)
, k = 1, . . . , (3.17)
φk+1,j = φk,j −φk+1,k+1φk,k+1−j , j = 1, . . . , k (3.18)
Assim, as tres primeiras autocorrelacoes parciais sao calculadas como
φ11 = ρ(1), (3.19)
φ22 =ρ(2)− ρ2(1)
1− ρ2(1), (3.20)
φ21 = φ11 −φ22φ11 (3.21)
φ33 =ρ(3)−φ21ρ(2)−φ22ρ(1)
1−φ21ρ(1)−φ22ρ(2), (3.22)
• Exemplo: No AR(1) φ11 = φ e φkk = 0 para k > 1. Ver notas de aula.
• Exemplo: MA(1). Aqui ρ(k) = θ/(1 +θ2) para |k| = 1 e zero em caso contrario.Por inducao.
φkk =−θk(1−θ2)1−θ2(k+1)
(3.23)
3.3.2 Estimacao
• Para estimar a FACP, estimamos primeiro as autocorrelacoes e depois calcu-lamos as correlacoes parciais, seja resolvendo o sistema (3.15) ou mediante oalgoritmo de Durbin-Levinson.
• Para testar a hipotese de Ruido Branco um resultado util e o seguinte,√nφkk→N (0,1). (3.24)
Entao, os Limites de Confianca 95% assintoticos para as autocorrelacoesparciais sao −,+2/
√n
3.4 Processos Lineares e Teorema de Wold
Os processos lineares tem um rol muito importante na analise de series temporais.Como veremos, pode ser mostrado que um processo estacionario e linear ou podeser transformado em linear retirando a componente deterministica. Este resultadoe o Teorema de Wold.
20

Series Temporais Mauricio Zevallos ©2013
Definicao 3.10 Una processo {Yt} e dito Processo Linear se para todo t temos aseguinte representacao:
Yt =∞∑
j=−∞ψjεt−j (3.25)
onde {εt} e um ruido branco estricto, RB(0,σ2), e {ψj} e uma sequencia de constantestais que
∞∑j=−∞
ψ2j <∞. (3.26)
Definicao 3.11 Um processo linear {Yt} e denominado MA(∞) se ψj = 0 para j < 0,isto e:
Yt =∞∑j=0
ψjεt−j . (3.27)
Observacao 3.1 A condicao (3.26) permite garantir que a soma infinita (3.25) convirjaem media quadratica (Teorema de Riesz-Fisher). No lugar de (3.26) outra condicaogeralmente utilizada e
∑∞j=−∞ |ψj | < ∞. Sob esta condicao o processo converge quase
seguramente.
Duas classes importantes de processos lineares sao os,
• ARMA, os quais satisfazem∑∞j=−∞ |ψj | <∞
• ARFIMA, os quais satisfazem∑∞j=−∞ψ
2j <∞mas
∑∞j=−∞ |ψj | =∞
Uma forma conveniente de escrever processos lineares e utilisando o operador dedesagem B. Podemos realizar operacoes algebricas com este operador.
Definicao 3.12 O operador de defasagem B produz a seguinte transformacao navariavel aleatoria Yt,
BkYt = Yt−k . (3.28)
E se c e uma constante entao Bc = c.
De (3.27)
Yt = ψ0εt +ψ1εt−1 +ψ2εt−2 +ψ3εt−3 + . . . (3.29)
= ψ0B0εt +ψ1B
1εt +ψ2B2εt +ψ3B
3εt + . . . (3.30)
= (ψ0B0 +ψ1B
1 +ψ2B2 +ψ3B
3 + . . .)εt . (3.31)
21

Series Temporais Mauricio Zevallos ©2013
Portanto,
Yt = Ψ (B)εt , onde Ψ (B) =∞∑j=0
ψjBj (3.32)
Assim, o polinomio Ψ (B) pode ser enxergado como um Filtro Linear, o qual, apli-cado no processo de entrada {εt} produz a saida {Yt}
Exemplo 3.12 Coeficientes ψj no AR(1) estacionario. Como (1 − φB)Yt = εt entaoYt = εt/(1−φB). Logo, ja que Yt = (ψ0B
0 +ψ1B1 +ψ2B
2 +ψ3B3 + . . .)εt entao,
11−φB
= ψ0B0 +ψ1B
1 +ψ2B2 +ψ3B
3 + . . . ,
1 = (1−φB)(ψ0B0 +ψ1B
1 +ψ2B2 +ψ3B
3 + . . .).
Dois polinomios sao iguais se os respectivos coeficientes de Bk sao iguais para k = 0,1, . . ..Portanto
1 = ψ0 (3.33)
0 = ψ1 −ψ0φ, ψ1 = φ (3.34)
0 = ψ2 −ψ1φ, ψ2 = φ2, (3.35)
e por inducao podemos demonstrar que ψk = φk .
Observacao 3.2 O exemplo anterior ilustra um procedimento para obter arepresentacao MA(∞) de um processo. Assim, seja Yt = A(B)εt com A(B) = a0 + a1B+a2B
2 + . . .. De (3.32) obtemos A(B) = Ψ (B) entao os coeficientes ψj sao encontradosresolvendo essa igualdade de polinomios.
O seguinte resultado estabelece que se aplicamos um filtro linear a um processoestacionario entao o resultado e outro processo estacionario.
Teorema 3.1 Seja {Yt} um processo estacionario com esperanca zero e FACV γy . Se∑∞j=−∞ψ
2j <∞ entao o processo
Xt =∞∑
j=−∞ψjYt−j (3.36)
e estacionario com esperanca zero e FACV
γX(τ) =∞∑
j=−∞
∞∑k=−∞
ψjψkγY (τ + k − j) (3.37)
22

Series Temporais Mauricio Zevallos ©2013
Portanto, se {Yt} e ruido branco,
γX(τ) = σ2∞∑
j=−∞ψjψj+τ (3.38)
Demonstracao. E(Xt) = 0. e
Cov(Xt ,Xt+τ ) = Cov(∞∑
i=−∞ψiYt−i ,
∞∑j=−∞
ψjYt+τ−j ) (3.39)
=∞∑
i=−∞
∞∑j=−∞
ψiψjCov(Yt−i ,Yt+τ−j ). (3.40)
Ja que {Yt} e estacionario entao Cov(Yt−i ,Yt+τ−j ) = γY (τ + i − j), entao substituindoesta expressao em (3.40) obtemos (3.37). Como γX(·) nao depende de t entao {Xt} eestacionario. Adicionalmente, note que γY (τ + i − j) = σ2 para j = i + τ e e zero emoutro caso. Portanto, considerando isto em (3.37) obtemos (3.38).
A expressao (3.38) permite calcular as autocovariancias em processos lineares. Vejao seguinte exemplo.
Exemplo 3.13 FAC do AR(1) estacionario. Seja yt = φyt−1 + εt com |φ| < 1 eεt ∼ RB(0,σ2). Como ψj = φj para j = 0,1, . . . entao γ(τ) = σ2 ∑∞
j=0φjφj+τ =
σ2φτ∑∞j=0φ
2j . Ja que∑∞j=0φ
2j = 1/(1−φ2) para |φ| < 1 obtemos γ(τ) = σ2φτ /(1−φ2).De aqui, γ(0) = σ2/(1−φ2) e portanto ρ(τ) = φτ para j = 0,1, . . ..
O Teorema anterior nos diz que os processos lineares sao estacionarios sempre quea condicao (3.26) seja satisfeita. O seguinte resultado nos diz como evolui a funcaode autocovariancia.
Teorema 3.2 Seja {Yt} um processo linear onde (3.26) e satisfeita. Entao,
|γY (τ)| → 0 quando τ→∞. (3.41)
Existe outra classe de processos estacionarios conhecidos como Harmonicos ouSingulares que nao cumprem o Teorema anterior. Com efeito, o processo singulardiscutido no Exemplo 3.4, Yt = ε1 cos(θt) + ε2 sin(θt), tem FAC ρ(k) = 0 para kimpar, ρ(2k) = (−1)k para k par, ver Exemplo 3.5. Isto e, as autocorrelacoes naoconvergem para zero na medida que as defasagens aumentam. Adicionalmente,note que {Yt} nao e linear pois os termos cos(θt) e sin(θt) dependem de t.
Definicao 3.13 Os processos Singulares estao definidos como
Yt =∞∑
j=−∞ϕj expiλj t εj , t ∈ Z (3.42)
23

Series Temporais Mauricio Zevallos ©2013
onde {ϕj} e uma sequencia de constantes tais que∑∞j=−∞ϕ
2j <∞ e {λj} e uma sequencia
de numeros reais no intervalo (−π,π].
E possivel demonstrar que os processos (3.42) sao estacionarios com FACV
γY (τ) = σ2∞∑
j=−∞ψ2j expiλjτ εj , τ ∈ Z (3.43)
Portanto, |γY (τ)|9 0 quando τ→∞.
O seguinte resultado conhecido como Teorema de Wold ou Descomposicao deWold desempenha um rol muito importante na teoria de series temporais.
Teorema 3.3 Todo proceso estacionario {Yt} pode ser escrito como:
Yt = Ut +Vt ,
Ut =∞∑j=0
ψjεt−j
Vt =∞∑
j=−∞ϕj expiλj t εj
onde {εt}, {εt} sao ruidos brancos com esperanca zero e variancia finita; as sequenciasde constantes {ψj}, {ϕj}, {λj} satisfazem
∑∞j=0ψ
2j <∞,
∑∞j=0ϕ
2j <∞, λj ∈ (−π,π], e as
componentes linear (Ut) e singular (Vt)sao ortogonais, isto e Cov(Ut ,Vt) = 0.
24

Capıtulo 4
Modelos ARMA
Uma clase importante de procesos estocasticos saoos Procesos Autoregresivos deMedias Moviles ARMA, propostos por Box & Jenkins. Estes modelos sao bastanteutilizados na analise de series temporais de diversas areas do conhecimento.
Denotaremos a um ruido branco estrito com esperanca 0 e variancia σ2 comoRB(0,σ2). Adicionalmente, B e o operador de defasagem.
4.1 Procesos de Medias Moveis
Definicao 4.1 Um processo de medias moveis de primer ordem com esperanca µ, deno-tado como MA(1), e definido como,
yt = µ+ εt +θεt−1, εt ∼ RB(0,σ2). (4.1)
Num exemplo anterior encontramos que as autocovariancias e autocorrelacoes sao,
γ(k) =
σ2(1 +θ2) si k = 0θσ2 si k = 10 elsewhere,
(4.2)
ρ(k) =
1 si k = 0θ/(1 +θ2) si k = 10 elsewhere,
(4.3)
O resultado (4.3) permite fazer a seguinte interpretacao: no processo MA(1) amemoria e de somente um perıodo.
Exemplo 4.1 Uma maneira de simular observacoes do processo MA(1) e a seguinte:simulamos n+ 1 observacoes de um ruido branco {εt} e depois obtemos os valores yt parat = 1, . . . ,n de (4.1). Na Figura 4.1 sao mostrados dois processos MA(1) simulados apartir da mesma sequencia de perturbacoes. O codigo R e,
25

Series Temporais Mauricio Zevallos ©2013
> eps = rnorm(201)
> y = eps[2:201] + 0.8*eps[1:200]
> z = eps[2:201] - 0.8*eps[1:200]
> par(mfrow=c(2,1))
> ts.plot(y,main="theta = 0.8")
> ts.plot(z,main="theta = -0.8")
Quando θ = 0.8 temos correlacao de ordem um positiva, de forma que valores grandes(pequenos) conduzem a valores grandes (pequenos). Mas, se θ = −0.8 temos correlacaode ordem um negativa e, de forma que valores grandes (pequenos) conduzem a valorespequenos (grandes). Isto e observado na Figura 4.1, na qual quando θ = −0.8 a serie emais aleatoria quando comparada com a serie com θ = 0.8.
theta = 0.8
Time
y
0 50 100 150 200
-2-1
01
23
theta = -0.8
Time
z
0 50 100 150 200
-20
24
Figura 4.1: Simulacao de um processo MA(1) com esperanca zero, σ2 = 1 e valores deθ iguais a 0.8 e -0.8.
Exemplo 4.2 No processo MA(1) mostrar que θ determina de maneira unica ρ(1) masnao o contrario.
Definicao 4.2 O processo de medias moveis de ordem q com esperanca µ, denotadocomo MA(q), e definido como,
yt = µ+ εt +θ1εt−1 + . . .+θqεt−q, εt ∼ RB(0,σ2). (4.4)
26

Series Temporais Mauricio Zevallos ©2013
Proposicao 4.1 O processo MA(q) e estacionario com autocovariancias
γ(k) =
σ2(1 +θ2
1 + . . .+θ2q ) si k = 0,
σ2 ∑q−kj=0 θjθj+k si k ≤ q
0 outro caso(4.5)
Neste caso podemos interpretar que a memoria e de q passos.
Exemplo 4.3 Seja um processo MA(2) com σ2 = 2, θ1 = 0.7, θ2 = −0.2. Entao a FAC e
ρ(k) =
0.37 si k = 1−0.13 si k = 20 si k = 3,4, . . .
(4.6)
Na Figura 2 e mostrada uma simulacao deste processo.
Figura 4.2: Simulacao de um processo MA(2) com esperanca zero, σ2 = 1, θ1 = 0.7,θ2 = −0.2
Com ajuda do operador de defasagem podemos escrever o processo MA(q) como
yt =q∑k=0
θkBkεt , θ0 = 1, (4.7)
= (q∑k=0
θkBk)εt . (4.8)
= θ(B)εt , (4.9)
onde θ(B) = 1 +θ1B+ . . .+θqBq recebe o nome de Polinomio de Media Movel.1
1Em alguns livros define-se o polinomio com coeficientes com sinal negativo
27

Series Temporais Mauricio Zevallos ©2013
4.2 Processos Autoregresivos
Os modelos autoregresivos, denotados por AR, sao bastante utilizados na analise deseries temporais. Um dos motivos e sua semelhanca com os modelos de regressao.Com efeito, se num modelo de regressao com variavel resposta yt consideramosvariaveis explanatorias sendo defasagens desta, isto e, yt−1, yt−2, . . . entao temos ummodelo autoregressivo. Formalmente temos a seguinte definicao.
Definicao 4.3 O processo {yt} e denominado autoregresivo de ordem p, denotadocomo AR(p), se
a) {yt} e estacionario.
b) {yt} satisfaz
yt = φ1yt−1 +φ2yt−2 + . . .+φpyt−p + εt , (4.10)
φ(B)yt = εt (4.11)
onde φ(B) = 1−φ1B− . . .−φpBp e o Polinomio Autoregressivo e εt ∼ RB(0,σ2).
Assim, o processo AR(p) supoe que seja estacionario, formalmente que exista umasolucao estacionaria em (4.10). Podemos demonstrar que isto acontece (e a solucaoe unica) se e somente se as raızes do polinomio autoregressivo
φ(z) = 1−φz −φ2z2 − . . .−φpzp
nao estao no circulo unitario. Isto e se as raızes da equacao φ(z) = 0 satisfazem|z| , 1.
Adicionalmente, estamos interessados em processos que sejam Causais, isto e,processos que possam ser escritos como
Yt =∞∑j=0
ψjεt−j ,∞∑j=0
|ψj | <∞ (4.12)
De forma que a observacao atual yt depende exclusivamente dos choques presente epassados εt , εt−1, εt−2, . . . mas nao dos choques futuros e portanto para K > 0
Cov(Yt , εt+k) = Cov
∞∑j=0
ψjεt−j , εt+k
(4.13)
=∞∑j=0
ψjCov(εt−j , εt+k) (4.14)
=∞∑j=0
ψjγε(k + j) (4.15)
28

Series Temporais Mauricio Zevallos ©2013
= 0, (4.16)
pois {εt} e ruido branco.
Pode-se demonstrar que um processo AR(p) e causal se e somente se as raızes daequacao φ(z) = 0 satisfazem |z| > 1.
A seguir discutiremos em detalhe os processos AR(1) e AR(2).
4.2.1 AR(1)
O processo AR(1)
yt = φyt−1 + εt (4.17)
tem solucao estacionaria se e somente se
1−φz = 0 ⇐⇒ |z| = 1/ |φ| , 1 ⇐⇒ |φ| , 1,
e o processo e causal se |φ| < 1. Neste caso, como demonstrado no capitulo anteriorYt =
∑∞j=0φ
jεt−j . Intuitivamente vemos isto assim
Yt = φt−1 + εt = φ(φyt−2 + εt−1) + εt = φ2yt−2 +φεt−1 + εt (4.18)
= φk+1Yt−k−1 +k∑i=0
φiεt−i (4.19)
como |φ| < 1 entao o primeiro termo vai para zero2 quando k→∞ e entao obtemosYt =
∑∞j=0φ
jεt−j .
Exemplo 4.4 Seja o processo AR(1) com φ = 0.7. Entao,
Yt = εt + 0.7εt−1 + 0.49εt−2 + 0.343εt−3 + 0.2401εt−4 + . . . (4.20)
e assim, o impacto dos choques εt−k no valor de Yt decresce a taxa exponencial na medidaque k aumenta.
Como demonstrado no capitulo anterior, o processo AR(1) causal tem esperancazero, variancia γ(0) = σ2/(1−φ2) e funcao de autocovariancia γ(k) = φkγ(0). Umaforma alternativa de encontrar a funcao de autocovariancia e utilisando repetida-mente a estrategia de multiplicar adequadamente em (4.17) e aplicar esperanca.
Assim, seja |φ| < 1
• Se o processo e estacionario com esperanca µ entao em (4.17) obtemos E(Yt) =φE(Yt−1) + E(εt) e entao µ = φµ. De forma que µ = 0 e em consequenciaγ(k) = E(YtYt−k).
2Se tratando de variaveis aleatorias, ha como definir isto formalmente
29

Series Temporais Mauricio Zevallos ©2013
• Yt× (4.17). Entao E(Y 2t ) = φE(YtYt−1) +E(Ytεt), isto e γ(0) = φγ(1) +E(Ytεt).
Mas, de εt× (4.17) e tomando esperanca, E(εtYt) = φE(εtYt−1)+E(ε2). Sendo oprocesso causal entao E(εtYt−1) = 0 e assim E(Ytεt) = σ2. Consequentemente,
γ(0) = φγ(1) + σ2 (4.21)
• Yt−1× (4.17) e tomando esperanca,
γ(1) = φγ(0) (4.22)
• De (4.21) e (4.23), {φ,σ2} sao determinados unicamente a partir de {γ(0),γ(1)}e viceversa. Em particular,
γ(0) =σ2
1−φ2 (4.23)
• Para k ≥ 2, de Yt−1× (4.17) e tomando esperanca,
γ(k) = φγ(k − 1). (4.24)
Esta e uma equacao em diferencas de ordem um cuja solucao e obtida porsubstituicao repetida considerando a condicao inicial γ(0). Com efeito, γ(2) =φγ(1) = φ2γ(0), γ(3) = φγ(2) = φ3γ(0), etc. De forma que,
γ(k) = φkγ(0), k ≥ 1, (4.25)
e portanto ρ(k) = φk .
Exemplo 4.5 Na Figura 4.3 sao mostradas duas series simuladas de processos AR(1).Em (a) consideramos φ = 0.7 e em (c) consideramos φ = −0.7. Comentar acerca docomportamento das series e das FAC amostrais.
Definicao 4.4 Dizemos que {Yt} e um processo AR(1) com esperanca µ se o processo{Yt −µ} e um processo AR(1).
Definicao 4.5 Dizemos que {Yt} e um processo AR(1) com drift se,
Yt = δ+φYt−1 + εt (4.26)
onde δ e uma constante e |φ| < 1.
O modelo (4.26) e estacionario e causal com esperanca
µ =δ
1−φ(4.27)
30

Series Temporais Mauricio Zevallos ©2013
(a) phi = 0.7
Time
x
0 50 100 150 200
-3-2
-10
12
3
0 5 10 15 20
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
Lag
ACF
(b) FAC de (a)
(c) phi = -0.7
Time
y
0 50 100 150 200
-3-2
-10
12
3
0 5 10 15 20
-0.5
0.0
0.5
1.0
Lag
ACF
(d) FAC de (c)
Figura 4.3: Simulacao de processos AR(1) com σ2 = 1 e φ = 0.7 em (a) e φ = −0.7em (c). Adicionalmente em (b) e (d) sao mostradas as respectivas FACamostrais.
e a mesma estrutura de autocovariancia que o modelo AR(1). Note que,
Yt = δk−1∑i=0
φi +k∑i=0
φiεt−i (4.28)
entao quando k→∞,
Yt =δ
1−φ+∞∑i=0
φiεt−i , (4.29)
de forma que E(Yt) = µ = δ/(1 −φ) e portanto {Yt} e AR(1) com esperanca (4.27).Outra forma de encontrar a esperanca e tomando valor esperado em (4.26). Se oprocesso e estacionario entao de E(Yt) = δ+φE(Yt−1) +E(εt) obtemos µ = δ+φµ ede aqui µ igual a (4.27).
4.2.2 AR(2)
Seja o processo AR(2)
Yt = φ1Yt1 +φ2Yt−2 + εt (4.30)
31

Series Temporais Mauricio Zevallos ©2013
Exemplo 4.6 Considere o processo
Yt = 0.75Yt1 − 0.125Yt−2 + εt (4.31)
Entao φ(z) = 1 − 0.75z + 0.125z2. Logo φ(z) = 0 ⇐⇒ z2 − 6z + 8 = 0 de forma queas raızes sao z1 = 4 e z2 = 2. Como estas raızes satisfazem |z| > 1 entao o processo eestacionario e causal.
4.3 Processos ARMA
Box and Jenkins propuseram uma forma parcimoniosa de expressar um processoestacionario causal Yt = ψ(B)εt definindo ψ(B) como o quociente de dois poli-nomios.
Definicao 4.6 {Yt} e um processo ARMA(p,q) se {Yt} e estacionario e se para cada t
φ(B)Yt = θ(B)εt (4.32)
onde os polinomios autoregressivo e de media movel, φ(B) e θ(B), nao possuem fatorescomuns.
O processo {Yt} e um processo ARMA(p,q) com media µ se {Yt−µ} e um processo ARMA.
Observacao 4.1 Fatores comuns nos polinomios significa raizes comuns. Por exemplose φ(B) = θ(B) = 1− 0.7B
Vemos que para que um processo seja ARMA, este precissa ter uma solucao esta-cionaria. O seguinte resultado fornece as condicoes para isso.
Proposicao 4.2 Existencia e UnicidadeA equacao (4.32) possui uma solucao estacionaria (que e unica) se e somente se as raizesde φ(z) = 0, digamos α, satisfazem |α| , 1
Exemplo 4.7 O processo Yt = 0.6Yt−1−0.08Yt−2 +εt−0.2εt−1 e na verdade um processoAR(1) Yt = 0.4Yt−1 + εt que e estacionario.
Estamos interessados em processos ARMA(p,q) causais, de forma que tenhamexpansao MA(∞). As condicoes sao as seguintes:
Proposicao 4.3 CausalidadeO processo ARMA(p,q) e causal se as raizes de φ(z) = 0, digamos α, estao fora do circulounitario, i.e |α| > 1
32

Series Temporais Mauricio Zevallos ©2013
Por outro lado, e importante, por exemplo em termos de previsao, que o processoARMA possa ser escrito na forma AR(∞),
εt = π0Yt +π1Yt−1 +π2Yt−2 +π3Yt−3 + . . . , (4.33)
= π(B)Yt , (4.34)
onde
π(B) = π0 +π1B+π2B2 +π3B
3 + . . . ,∑|πj | <∞ (4.35)
Neste caso o processo e chamado inversıvel.
Proposicao 4.4 InversibilidadeO processo ARMA(p,q) e inversivel se as raizes de θ(z) = 0, digamos α, estao fora docirculo unitario, i.e |α| > 1
Seja o processo ARMA φ(B)Yt = θ(B)εt. Se o processo e causal podemos encontraros coeficientes ψj da representacao MA(∞) atraves da igualdade de polinomios
θ(B)φ(B)
= ψ(B) ⇐⇒ θ(B) = φ(B)ψ(B). (4.36)
Se o processo e inversıvel, para encontrar os coeficientes πj da representacao AR(∞)trabalhamos com
φ(B)θ(B)
= π(B) ⇐⇒ φ(B) = θ(B)π(B). (4.37)
Note que os processos MA(q) sempre sao causais e os processo AR(p) sempre saoinversıveis.
Exemplo 4.8 Seja o processo ARMA(1,1)
Yt = 10 + 0.8Yt−1 + εt − 0.5εt−1 (4.38)
Exemplo 4.9 O processo yt = εt − 0.5εt−1 pode ser escrito como
εt =∞∑k=0
0.5kyt−k (4.39)
isto e podemos aproximar este MA(1) pelo processo
Yt ' 0.5Yt−1 + 0.25Yt−2 + 0.125Yt−3 + 0.0625Yt−4 + εt (4.40)
Portanto, confrontados MA(1) com AR(4), pelo principio da parsimonia escolhemosMA(1), mas em termos de explicacao para o usuario preferimos AR(4).
33

Series Temporais Mauricio Zevallos ©2013
4.4 Estrutura de Dependencia nos processos ARMA
Para calcular as autocovariancias e a FAC nos processos ARMA podemos utilisar osseguintes procedimentos
(a) Escrever o processo na forma MA(∞) Yt =∑∞j=0ψjεt−j e usar o Teorema 3.1,
ou
(b) Utilisar o metodo descrito anteriormente de (i) multiplicar convenientementee (ii) calcular a esperanca.
No seguinte exemplo e ilustrada a opccao (b).
Exemplo 4.10 Exemplo 4.8 (cont). FAC
Teorema 4.1 FAC do ARMA. No processo ARMA(p,q) temos o seguinte comporta-mento em termos da FAC e FACP.
AR(p) MA(q) ARMA(p,q)FAC decaimento zero depois da decaimento
exponencial defasagem q exponencialFACP zero depois da decaimento decaimento
defasagem p exponencial exponencial
4.5 Notas
Proposicao 4.5 Equacao em Diferencas de 2do grauSejam a e b constantes. As solucoes da equacao em diferencas de 2do grau,
τ(k) = aτ(k − 1) + bτ(k − 2), k ≥ l
dependem da natureza das raizes de bz2 + az−1 = 0. Sejam m1 e m2 estas raizes. Entao,
• Se as raizes sao reais e diferentes
τ(k) = c1
(1m1
)k+ c2
(1m2
)k• Se as raizes sao reais e iguais, m1 =m2 =m
τ(k) = (c1 + c2k)( 1m
)k
34

Series Temporais Mauricio Zevallos ©2013
• Se as raizes sao complexas, α − iβ, α + iβ
τ(k) = c1
(1r
)kcos(θk + c2)
r =√α2 + β2
θ = arcCos(αr
)= arcSen
(βr
)onde as constantes sao determinadas a partir das condicoes inicias τ(l − 1), τ(l − 2)
35

Capıtulo 5
Modelagem ARMA
Na Construcao do Modelo ARMA os passos sao os seguintes: Analise Exploratoria,Especificacao, Estimacao, Diagnostico e Selecao de Modelo.
5.1 Analise Exploratoria
Fazer o grafico da serie, utilizar uma transformacao para estabilizar a variancia eavaliar se os dados apresentam dependencia.
5.2 Identificacao
A traves da FAC e FACP, determinar os valores de p e q. Usualmente sao preferidosvalores de p,q = 0,1,2,3,4.
5.3 Estimacao
Metodo de maxima verossimilhanca. Avaliar se as estimativas sao estatısticamentesignificativas. Checar causalidade e invertibilidade. Cuidado com as raizes comuns.Avaliar se ha overfitting
5.4 Diagnostico
A ferramenta basica e a Analise de Resıduos. Seja et o t-esimo resıduo e seja e∗to t-esimo resıduo padronizado. A ideia e que os residuos {et} devem imitar asperturbacoes {εt}. O principal aspecto a ser avaliado e a ausencia de correlacao nosresıduos. Para isto podemos utilizar a FAC e o teste de Box-Ljung,
Q(m) = n(n+ 2)m∑i=1
ρ2e (i)n− i
. (5.1)
36

Series Temporais Mauricio Zevallos ©2013
Sob a hipotese nula de ausencia de correlacao,Q(m) ∼ χ2m−k onde k = p+q =numero
de parametros φi e θj . Caso houver estrutura de correlacao, postular outro modelo.Outros aspectos que precissam ser avaliados sao: homocedasticidade dos residuos,normalidade (quando for assumido distribuicao Gaussiana) e examinar se havalores atıpicos (outliers1).
5.5 Selecao de Modelo
Se tivermos varios modelos satisfatorios, podemos escolher um deles utilizando oscriterios de informacao:
Akaike : AIC = ln(σ2) + (n+ 2k)/n (5.2)
: AICc = ln(σ2) + (n+ k)/(n+ k − 2) (5.3)
Schwarz : BIC = ln(σ2) + ln(n)k/n (5.4)
onde σ2 e o estimador deverossimilhanca de σ2 e k e o numero de parametros.2
Preferimos aquele modelo com menor valor dos criterios. No entanto, tem semostrado que o criterio de Akaike tende a escolher o modelo de maior ordem.
5.6 Aplicacoes
Exemplo 5.1 Serie W7 de Wei: yearly number of lynx pelts sold by the Hudson’s BayCompany in Canada between 1857 and 1911.
E estimado um modelo ARMA(2,1) com media no logaritmo da serie. O resultado e
(1− 1,53B+ 0,91B2)(ln(yt)− 9,81) = (1− 0,60B)εt
A saida do programa Gretl e a seguinte3.
Modelo 1: ARMA, usando as observacoes 1857–1911 (T = 55)Variavel dependente: l v1
Erros padrao baseados na Hessiana
Coeficiente Erro Padrao z p-valor
const 9,81495 0,0484385 202,6271 0,0000φ1 1,52577 0,0553305 27,5756 0,0000φ2 −0,913413 0,0482659 −18,9246 0,0000θ1 −0,605412 0,107868 −5,6125 0,0000
1Isto pode ser feito utilizando testes de outliers ou de maneira informal identificando os residuospadronizados com valores maiores (em modulo) a 3 ou 4
2No R, usando o commando sarima, k = p+ q+ 1 quando a media e estimada.3Escolher opcao por defeito, isto e ML incluindo constante
37

Series Temporais Mauricio Zevallos ©2013
Media var. dependente 9,803051 D.P. var. dependente 0,881952Media de inovacoes 0,005865 D.P. das inovacoes 0,336084Log da verossimilhanA§a −19,71207 Criterio de Akaike 49,42414Criterio de Schwarz 59,46081 Hannan–Quinn 53,30540
Na Figura 5.1 e mostrado o ajuste.
8
8,5
9
9,5
10
10,5
11
11,5
1860 1870 1880 1890 1900 1910
l_v1
Ajuste serie ln(W7)
ajustadoefetivo
Figura 5.1: Ajuste W7
Exemplo 5.2 Foi ajustado um modelo ARMA(2,1) na serie temporal serie1-rc. Oresultado do ajuste e o seguinte,
Coeficiente Erro Padrao z p-valor
const 0,0242693 0,0664434 0,3653 0,7149φ1 0,987388 0,172959 5,7088 0,0000φ2 −0,109131 0,0612202 −1,7826 0,0747θ1 −0,834819 0,164471 −5,0758 0,0000
Media var. dependente 0,023617 D.P. var. dependente 0,992319Media de inovacoes −0,000805 D.P. das inovacoes 0,977897Log da verossimilhanca −558,6512 Criterio de Akaike 1127,302Criterio de Schwarz 1147,260 Hannan–Quinn 1135,206
38

Series Temporais Mauricio Zevallos ©2013
Real Imaginaria Modulo FrequenciaAR
Raiz 1 1,1620 0,0000 1,1620 0,0000Raiz 2 7,8858 0,0000 7,8858 0,0000
MARaiz 1 1,1979 0,0000 1,1979 0,0000
Temos raizes muito proximas: 1,1620 e 1,1979; portanto, o modelo poderia ser simplifi-cado. Fazer o ajuste do modelo AR(1) e compare os dois ajustes. Qual modelo escolheria?Fazer a analise completa incluindo diagnostico e comparando os criterios de informacao.
39

Capıtulo 6
Modelos ARIMA e SARIMA
Os modelos ARMA estudados no capitulo anterior nao sao capazes de reproduzircaracteristicas como tendencia e sazonalidade. Para fazer isto e necessario extenderos modelos anteriores. Especıficamente estudaremos os modelos Sazonais Integra-dos ARMA, SARIMA. Estos consideram tanto a tendencia como a sazonalidadecomo estocasticas.
Comecamos tratando as series com tendencia.
6.1 Modelos ARMA Integrados
6.1.1 Tendencia Estocastica
Lembrando o passeio ao acaso. Este processo esta definido como Yt = Yt−1 + εt parat = 1,2, . . . e consideremos que Y0 = c. Assim,
Yt = c+ εt−1 + εt−2 + . . .+ ε1
e portanto E[Yt] = c e V ar[Yt] = (t − 1)σ2. Isto e, trata-se de um processo naoestacionario na variancia. Na Figura X mostramos uma serie simulada desteprocesso com σ2 = 1. Observamos que a trajetoria e difıcil de antecipar.
Considere agora o processo
Yt = Yt−1 + (1 +θB)εt (6.1)
= Yt−1 +ωt , ωt ∼MA(1) (6.2)
Daqui, E(Yt) = E(Yt−1) e assumindo que Y0 = c, entao o processo e estacionarioem media. Isto e, nao ha tendencia genuina. No entanto, a perturbacao ωt naoe ruido branco e se tiver bastante correlacao entao Yt tende a apresentar longosperiodos acima e longos periodos abaixo da media. Este fenomeno e conhecidocomo tendencia estocastica.
40

Series Temporais Mauricio Zevallos ©2013
Note que podemos escrever os processos anteriores como, (1−B)Yt = εt e (1−B)Yt =(1 + θB)εt. Definindo Xt = (1 − B)Yt temos que em ambos os casos os processos{Xt} sao estacionarios. Em outras palavras, o operador (1−B) permite transformarum processo nao estacionario em um estacionario. No jargao de series temporaisaplicar o operador (1−B) significa diferenciar a serie. A seguir apresentamos umafamılia de processos que incorpora estas ideias.
6.1.2 ARIMA
Definicao 6.1 Seja d um inteiro nao negativo, entao {Yt} e um processo ARIMA(p,d,q)se Xt = (1−B)dYt e um processo ARMA causal.
Da definicao, {Yt} e ARIMA(p,d,q) se satisfaz a equacao em diferencas,
φ(B)(1−B)dYt = θ(B)εt , εt ∼ RB(0,σ2) (6.3)
onde φ(B) e θ(B) sao os polinomios autoregressivos (de grau p) e de media movel(de grau q), respectivamente. Para satisfazer a condicao de causalidade, as raızesde φ(z) = 0 estao fora do circulo unitario.
1. {Yt} e estacionario se e somente se d = 0
2. Seja c uma constante, ja que (1 − B)(Yt − c) = Yt − Yt−1 = (1 − B)Yt entao sed ≥ 1 podemos introduzir uma constante em (6.4) e o processo Yt continuasatisfazendo a equacao em diferencas. Exeto quando d = 0 a media doprocesso {Yt} nao e determinada pela equacao (6.4).
3. d e conhecido como o grau de diferenciacao e Xt = (1 − B)dYt = ∇dYt e oprocesso diferenciado (na modelagem, se y1, . . . , yn sao as observacoes entaoxt = (1−B)dyt e a serie diferenciada.
Exemplo 6.1 Considere os processos
• ARIMA(1,1,0): (1− 0.8B)(1−B)Yt = εt
• ARIMA(0,1,1): (1−B)Yt = (1− 0.75B)εt
• ARIMA(1,1,1): (1− 0.9B)(1−B)Yt = (1− 0.5B)εt
Foram simuladas tres trajetorias destes processos. Comentarios
• As series apresentam tendencia estocastica e as series diferenciadas (com d = 1)parecem estacionarias.
• As autocorrelacoes amostrais sao grandes e decaem muito divagar.
41

Series Temporais Mauricio Zevallos ©2013
• Na FACP amostral, a primeira autocorrelacao parcial e muito grande e o restoproximo de zero.
Note que a rigor a FAC e a FACP nao estao definidas pois os processos sao nao-estacionarios. No entanto, na modelagem, as FAC e FACP amostrais sao ferramen-tas importantes para a identificacao. Neste sentido se observarmos as caracterısticasmencionadas, entao modelos candidatos sao os modelos ARIMA.
6.1.3 Modelagem ARIMA
Seja y1, . . . , yn a serie de interesse, a qual supomos foi gerada pelo processoARIMA(p,d,q),
φ(B)(1−B)dYt = δ+θ(B)εt , εt ∼ RB(0,σ2), (6.4)
onde δ e uma constante. Na modelagem podemos seguir o seguinte roteiro.
1. Examinar se a serie e estacionaria em termos de variancia. Se nao for, pode-mos utilisar as transformacoes de Box-Cox.
2. Se a serie nao for estacionaria em termos de media, diferenciar a serie atetorna-la estacionaria. Isto e, escolher o valor de d tal que xt = ∇dyt parecaestacionaria. Nas aplicacoes valores tıpicos sao d = 1 ou d = 2. Devemos tercuidado com a sobre-diferenciacao, isto e, escolher um valor de d maior do queo necessario. Consequencias de fazer isto sao aumentar a variabilidade daserie e ou mascarar a dependencia na serie diferenciada.
3. Com base nas observacoes x1, . . . ,xn−d (pois perdemos d observacoes por causada diferenciacao) identificar um modelo ARMA. Isto e, determinar os valoresde p e q.
4. Uma vez determinada a ordem do modelo, estimar o modelo ARIMA(p,d,q) 1
e fazer o diagnostico.
Modelo estacionario ou nao estacionario? Na modelagem poderiamos ter comocandidatos um modelo ARMA e um modelo ARIMA. Qual escolher? Como sempre,devemos considerar a natureza da serie analisada. Por exemplo, se as observacoescorrespondem a medidas de um processo controlado teria mais sentido ajustar ummodelo estacionario. Outro elemento a considerar e quais as consequencias emtermos de previsao. O comportamento a medio ou longo praco das previsoes dosmodelos ARMA e ARIMA e muito diferente.
Exemplo 6.2 Serie W5 de Wei: yearly cancer death rate (all forms, per 100000 popula-tion) of Pennsylvania between 1930 and 2000.
1No Gretl, usar o metodo de estimacao por defeito
42

Series Temporais Mauricio Zevallos ©2013
Estimando ARIMA(0,1,0) com constante obtemos: δ = 2,05429, ep(δ) = 0,333571 eσ = 2,790859
Exemplo 6.3 Serie W6 de Wei: yearly US tobacco production from 1871 to 1984
Seja yt a serie, estimamos ARIMA(0,1,1) com constante no ln(yt) e obtemos: δ =0,0142574, ep(δ) = 0,00482235, θ = −0,688905, ep(θ) = 0,0686734 e σ = 0,161523.
5
5,5
6
6,5
7
7,5
8
1880 1900 1920 1940 1960 1980
ln(y
_t)
Série W6: observado vs ajustado
ajustadoefetivo
Figura 6.1: Ajuste W6
6.2 Modelos SARIMA
Ja sabemos como modelar series com tendencia estocastica. No entanto, muitasseries exibem comportamentos sazonais. A seguir discutiremos como modificar oprocesso ARIMA para que capture sazonalidade.
6.2.1 Modelos Sazonais Puros
Comecamos discutindo o seguinte exemplo: interesa modelar a serie de dados com-posta pelas vendas trimestrais de sorvete. Usualmente observa-se que as maioresvendas acontecem nos veroes e as menores vendas nos invernos. Adicionalmente,observa-se que as vendas nos veroes estao correlacionadas e o mesmo acontece comos invernos e nas outras estacoes. Isto e, observa-se um comportamento periodicoem tempos multiplos de s = 4. Entao seria conveniente ter um modelo que expliquea serie nos tempos multiplos de s.
43

Series Temporais Mauricio Zevallos ©2013
Definicao 6.2 Os modelos Sazonais Autoregressivos de Media movel puros,SARMA(P ,Q)s estao definidos como
Φ(Bs)(yt −µ) =Θ(Bs)εt , (6.5)
Φ(Bs) = 1−Φ1Bs −Φ2B
2s − . . .−ΦPBP s, (6.6)
Θ(Bs) = 1 +Θ1Bs +Θ2B
2s + . . .+ΘQBQs. (6.7)
Note que este processo e como um processo ARMA mas com operadores definidosem multiplos de s. Asim, o processo SARMA e causal somente quando as raizesdo polinomio Φ(zs) estao fora do cırculo unitario e e inversıvel somente quando asraizes do polinomio Θ(zs) estao fora do cırculo unitario.
Exemplo 6.4 O modelo SARMA(1,0)12 esta definido como
(1−Φ1B12)yt = εt , (6.8)
yt = Φ1yt−12 + εt . (6.9)
Supondo que as observacoes correspondem a vendas mensais, podemos interpretar queas vendas deste mes dependem das vendas do mesmo mes no ano anterior. Note que estemodelo e causal se |Φ1| < 1 e e inversıvel. Fazendo uma analogia com os procesos ARMA,a FACov e
γ(k) =
σ2/(1−Φ2
1 ) si k = 0σ2Φk1 /(1−Φ
21 ) se k = . . . ,−24,−12,12,24, . . .
0 o.c,(6.10)
Observe que nas defasagens que nao sao multiplos de 12 as autocovariancas sao zero.
Por outro lado, o processo SARMA(0,1)4,
yt = (1 +Θ1B4)εt = εt +Θ1εt−4, (6.11)
e inversıvel se |Θ1| < 1 e e causal. A FACov e
γ(k) =
σ2(1 +Θ2
1) si k = 0Θ1σ
2 se |k| = 40 o.c,
(6.12)
A FAC dos processos SARMA(P ,Q)s apresenta o mesmo comportamento qualitativoque os procesos ARMA nos tempos multiplos de s.
Exemplo 6.5 Encontrar as condicoes de causalidade e inversivilidade do processoSARMA(1,1)12 definido como
(1−Φ1B12)yt = (1 +Θ1B
12)εt , (6.13)
yt = Φ1yt−12 + εt +Θ1εt−12 (6.14)
44

Series Temporais Mauricio Zevallos ©2013
e calcule a FAC.
Suponhamos agora que a empresa que vende sorvetes tem conseguido sucessonas vendas e cada ano vende mais. Isto e, nao so as vendas de cada trimestreestao correlacionadas; tambem as vendas nos veroes apresentam tendencia. Istosignifica que temos nao-estacionaridade sazonal. Para incorporar esta caracteristicano modelo SARMA anterior, trabalhamos de maneira analoga ao realizado com osmodelos ARIMA.
Definicao 6.3 O operador de diferenca sazonal, D esta definido como
∇Ds yt = (1−Bs)Dyt , (6.15)
onde D asume valores inteiros: 1,2, . . .
Definicao 6.4 O modelo SARIMA(P ,D,Q)s esta definido como
Φ(Bs)(1−Bs)D(yt −µ) =Θ(Bs)εt (6.16)
Note que este processo e como ARIMA em periodos s.
Exemplo 6.6 O modelo SARIMA(0,1,1)4 esta definido como
(1−B4)yt = (1 +Θ1B4)εt , (6.17)
yt − yt−4 = εt +Θ1εt−4, (6.18)
yt = yt−4 + εt +Θ1εt−4. (6.19)
Note que yt − yt−4 e SARMA causal.
6.2.2 Modelos Sazonais Mistos
Estudemos agora vendas mensais de sorvetes. E logico pensar que as vendasde Janeiro nao so dependem das vendas nos Janeiros passados mas tambem dasvendas de Dezembro, Novembro, etc. Portanto temos que incorporar no modeloas correlacoes mes a mes (periodo 1) e ano a ano (periodo s = 12). Una maneirade fazer isto e combinar os modelos ARIMA con los modelos SARIMA purosde forma multiplicativa. Definimos asim os Modelos Multiplicativos SazonaisAutoregressivos Integrados de Medias Movel, SARIMA(p,d,q)(P ,D,Q)s.
Definicao 6.5 Os modelos SARIMA(p,d,q)(P ,D,Q)s estao definidos como
Φ(Bs)φ(B)(1−Bs)D(1−B)d(yt −µ) =Θ(Bs)θ(B)εt , (6.20)
onde
Φ(Bs) = 1−Φ1Bs −Φ2B
2s − . . .−ΦPBP s, (6.21)
45

Series Temporais Mauricio Zevallos ©2013
Θ(Bs) = 1 +Θ1Bs +Θ2B
2s + . . .+ΘQBQs, (6.22)
φ(B) = 1−φ1B−φ2B2 − . . .−φpBp, (6.23)
θ(B) = 1 +θ1B+θ2B2 + . . .+θqB
q. (6.24)
A analise da dependencia nestes modelos realiza-se combinando a informacaoda parte sazonal pura e a parte regular (de ARIMA). Vejamos isto nos seguintesexemplos.
Exemplo 6.7 Seja o processo SARIMA(0,0,1)(0,0,1)4,
yt = (1− 0.5B)(1− 0.8B4)εt (6.25)
= εt − 0.5εt−1 − 0.8εt−4 + 0.4εt−5 (6.26)
Asim, o presente esta relacionado com um tempo atras e quatro tempos atras. Mas, dacombinacao destas tem que estar relacionada com tres e cinco tempos atras. Com efeito,a parte regular MA(1) tem autocorrelacao diferente de zero so na primeira defasagem. Aparte sazonal pura so tem correlacao diferente de zero na defasagem 4. Entao o processomisto tem autocorrelacoes diferentes de zero nas defasagens (obviando negativos) 1,3,4 e5.
[Graficos]
Exemplo 6.8 Seja o proceso SARIMA(0,0,1)(1,0,0)12,
(1− 0.6B12)yt = (1− 0.7B)εt (6.27)
yt = 0.6yt−12 + εt − 0.7εt−1 (6.28)
Aqui temos uma parte sazonal pura e uma parte regular decrescentes como no AR(1). Asautocorrelacos do AR(1) existem para todos os multiplos de 12, mas aquelas da parte reg-ular so existem para a primeira defasagem, entao o processo misto terıa autocorrelacoesdiferentes de zero nas defasagens 1,11,12,13,23,24,25,35,36,37, . . ..
[Graficos]
Estes resultados podem ser comprovados calculando a FAC teorica utilizando asferramentas expostas para os modelos ARMA.
46

Series Temporais Mauricio Zevallos ©2013
Existe uma equivalencia entre os processos SARIMA nao integrados, SARMAe os processos ARMA. Com efeito, podemos demonstrar que o processoSARMA(p,q)(P ,Q)s e un processo ARMA(p+ sP ,q+ sQ)s com restricoes. Vejamos oseguinte exemplo.
Exemplo 6.9 Seja o processo SARMA(1,0)(1,0)4,
(1−φB)(1−ΦB4)yt = εt . (6.29)
Este processo pode ser escrito como
(1−φB−ΦB4 +φΦB5)yt = εt , (6.30)
isto e, como um processo ARMA(5,0) com as seguintes restricoes: φ1 = φ, φ2 = φ3 = 0,φ4 = Φ , φ5 = φΦ .
Entao surge a pergunta, porque nao utilisar modelos ARMA no lugar dosSARMA? A respuesta e: por parsimonia e interpretabilidade. Os modelos SARMAoferecem melhor interpretacao e os modelos ARMA equivalentes poderiam ter de-masiadas restricoes. Isto ultimo e um inconveniente do ponto de vista de estimacao,devido a que teriamos que fazer maximizacao com restricoes para encontrar osestimadores de maxima verossimilhanca.
Exemplo 6.10 Modelo AIRLINE. Nas aplicacos, um modelo SARIMA bastante util-isado e o SARIMA(0,1,1)(0,1,1)12, chamado de AIRLINE devido a sua aplicacao inicialem dados de passageiros de aviao. O modelo e
(1−B12)(1−B)yt = (1 +ΘB)(1 +θB)εt , (6.31)
entao,
yt = yt−1 + yt−12 − yt−13 + εt +θεt−1 +Θεt−12 +θΘεt−13. (6.32)
6.3 Construcao do Modelo SARIMA
As etapas na construcao do modelo SARIMA sao as seguintes: Fazer o grafico daserie, transformar os dados (por exemplo quando a serie nao e estacionaria na variancia),Identificacao, Estimacao, Diagnostico, Previsao, Comparacao de modelos.
No estagio de identificacao primeiro observamos se a serie apresenta tendencia eou sazonalidade. Isto pode ser feito com base no grafico da serie e dos graficos daFAC e FACP. Assim determinamos o valor do periodo sazonal (s). Depois, utilisandoa FAC e FACP, na analise de la parte estacional, se observarmos que o decaimentodas autocorrelacoes nas defasagens multiplos de s e muito divagar, entao podeser conveniente diferenciar sazonalmente. Na parte regular, se observarmos queas autocorrelacoes decaem muito divagar entao pode ser conveniente diferenciar.
47

Series Temporais Mauricio Zevallos ©2013
Outra evidencia de que e necessario diferenciar e se existe tendencia na serie. Napratica sao escolhidos valores de d,D iguais a 0,1 ou 2. A serie obtida logo dediferenciar as partes sazonal e regular,
xt = (1−B)d(1−Bs)D , (6.33)
tem que lucir estacionaria. Lembre que tem que ter cuidado com asobrediferenciacao. Com base na serie xt, auxiliados pela FAC e FACP, determi-namos os valores de p,P ,q,Q. A determinacao destes valores pode ser complicada,de forma que na pratica temos que agir por ensaio e erro.
Uma vez determinada a ordem do modelo, a estimacao e feita usualmente pormaxima verosimilhanca. A etapa de diagnostico e realizada de acordo com odiscutido para modelos ARMA. Nesta etapa, lembre que o mais importante econseguir resıduos que nao apresentem dependencia. Caso contrario, temos queformular outro modelo.
Com respeito a comparacao de modelos, sao utilisados os criterios AIC, BIC, assimcomo os indicadores relativos a previsao como MAPE, MAE, etc.
Exemplo 6.11 Serie mensal ”Federal Reserve Board Production Index”no peri-odo 1948-1978, analisada em Shumway and Stoffer. Ajustamos um modeloSARIMA(2,1,0)(0,1,3)12.
Modelo 1: ARIMA, usando as observacoes 1949:02-1978:12 (T = 359)Variavel dependente: (1−L)(1−Ls)v1
Erros padrao baseados na Hessiana
Coeficiente Erro Padrao z p-valor
const 0,0173252 0,0410887 0,4217 0,6733φ1 0,303382 0,0526578 5,7614 0,0000φ2 0,107197 0,0537410 1,9947 0,0461Θ1 −0,739737 0,0538819 −13,7289 0,0000Θ2 −0,143955 0,0653029 −2,2044 0,0275Θ3 0,281323 0,0526522 5,3430 0,0000
Media var. dependente 0,029805 D.P. var. dependente 1,589325Media de inovacoes 0,009010 D.P. das inovacoes 1,145208Log da verossimilhanca −563,8958 Criterio de Akaike 1141,792Criterio de Schwarz 1168,975 Hannan–Quinn 1152,601
48

Series Temporais Mauricio Zevallos ©2013
Real Imaginaria Modulo FrequenciaAR
Raiz 1 1,9511 0,0000 1,9511 0,0000Raiz 2 −4,7812 0,0000 4,7812 0,5000
MA (sazonal)Raiz 1 1,1981 0,6714 1,3734 0,0813Raiz 2 1,1981 −0,6714 1,3734 −0,0813Raiz 3 −1,8845 0,0000 1,8845 0,5000
20
40
60
80
100
120
140
160
1950 1955 1960 1965 1970 1975
v1
v1 efetivo e ajustado
ajustadoefetivo
Figura 6.2: Ajuste ”Federal Reserve Board Production Index”
49

Capıtulo 7
Previsao
7.1 Introducao
• Seja {Yt} um processo estocastico. O problema de previsao e determinar umvalor para YT+k dada a informacao FT , a qual pode ser definida como
(a) Passado Finito: FT = {Y1, . . . ,YT }(b) Passado Infinito: FT = {YT ,YT−1, . . .}
Esta previsao e denotada por YT (k) onde k e o horizonte de previsao.
• Na pratica temos que lidar com a situacao (a), no entanto podemos aproveitara teoria desenvolvida sob (b) para resolver o problema (a). Em ocasioes osresultados obtidos sob (b) constituem boas aproximacoes para (a).
• Para obter a previsao YT (k) e desejavel que o erro de previsao
eT (k) = YT+k −YT (k), (7.1)
seja o menor possıvel em algum sentido. Se tratando de variaveis aleatorias,o criterio mais utilizado neste problema e procurar a previsao que forneca omenor Erro Quadratico Medio.
7.2 Previsao em Processos Autoregressivos
7.3 Previsao em Processos de Media Movel e ARMA
7.4 Previsao com amostra infinita em processos esta-
cionarios
• Seja {Yt} um processo estacionario com E(Yt) = 0 e funcao de autocovarianciaconhecida γ(·).
50

Series Temporais Mauricio Zevallos ©2013
• Para calcular o Erro Quadratico Medio de Previsao (EQMP) supomos que oprocesso Tt e causal
YT+k =∞∑j=0
ψjεT+k−j , ψ0 = 1 (7.2)
• Aplicando o operador E(·|YT ,YT−1, . . .) o qual minimiza o EQMP encontramos
YT (k) =∞∑j=k
ψjεT+k−j . (7.3)
• Logo o erro de previsao e
eT (k) = YT+k −YT (k) =k−1∑j=0
ψjεT+k−j (7.4)
• O EQMP
v(k) = V ar[eT (k)] = σ2k−1∑j=0
ψ2j (7.5)
• Supondo que o processo e Gaussiano, Intervalos de Confianca para PrevisaoYT+k sao da forma,
YT (k) +−zα/2√v(k). (7.6)
Quando o processo nao e normal podemos usar desigualdades tipo Tchebi-shev ou Bonferroni.
7.5 Previsao em Processos ARIMA e SARIMA
7.6 Comportamento a longo prazo
Seja {Yt} um processo estacionario com E(Yt) = µ. Entao a previsao esta dada porYT (k) = µ+
∑∞j=kψjεT+k−j . Quando k→∞ os coeficientes ψj decaem exponencial-
mente a zero e e possivel demonstrar que YT (k)→ µ, onde esta convergencia e nosentido de erro quadratico medio. De forma que, nos processos estacionarios, aprevisao converge para a media do processo.
Adicionalmente, quando k→∞
v(k) = V ar[eT (k)] = σ2k−1∑j=0
ψ2j → σ2
∞∑j=0
ψ2j = γY (0) = V ar(Y ). (7.7)
51

Series Temporais Mauricio Zevallos ©2013
Como v(k) ≤ V ar(Y ) entao a incerteza da previsao aumenta na medida que aumentao horizonte de previsao mas converge a um valor igual a variabilidade da serie.
Ja quando o processo e nao-estacionario, a incerteza das previsoes nao converge, ede fato aumenta na medida que aumenta o horizonte de previsao.
7.7 Criterios para comparar modelos em termos de pre-
visoes
Sejam YT (1), . . . ,YT (m) as previsoes calculadas. Uma forma de avaliar a qualidadedo modelo ajustado em termos de previsao e comparar essas previsoes com osvalores observados YT+1, . . . ,YT+m. Para isto, quatro criterios sao
(a) Mean Percentage Error,
MPE = 1001m
m∑k=1
eT (k)YT+k
(7.8)
(b) Mean Square Error,
MPE =1m
m∑k=1
e2T (k) (7.9)
(c) Mean Absolute Error,
MPE =1m
m∑k=1
|eT (k)| (7.10)
(d) Mean Absolute Percentage Error,
MPE = 1001m
m∑k=1
∣∣∣∣∣eT (k)YT+k
∣∣∣∣∣ (7.11)
52







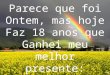












![Maurício Vargas [Português]](https://img.pdfslide.tips/doc/110x75/58cfcad71a28ab7c6e8b57b1/mauricio-vargas-portugues.jpg)