Embed Size (px)
Citation preview
6
150
Livro: Introdução à Álgebra LinearAutores: Abramo Hefez
Cecília de Souza Fernandez
Capítulo 6: Transformações Lineares eMatrizes
Sumário
1 Matriz de uma Transformação Linear . . . . . . . 151
2 Operações com Transformações Lineares e Ma-
trizes . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
3 Operadores Lineares em R2 e em R3 . . . . . . . . 163
4 Mudança de Base e Matrizes Semelhantes . . . . 171

1. MATRIZ DE UMA TRANSFORMAÇÃO LINEAR 151
Neste capítulo, mostramos como associar matrizes a transformações line-
ares, reduzindo as operações com transformações lineares a operações com
matrizes, o que permite ganhar computabilidade.
1 Matriz de uma Transformação Linear
Nesta seção, veremos que se V e W são espaços vetoriais de dimensão
�nita, com bases �xadas, então uma transformação linear T : V → W pode
ser representada por uma matriz. A vantagem de uma tal representação é
que muitos problemas associados às transformações lineares entre espaços
de dimensão �nita podem ser resolvidos com a teoria das matrizes, como
veremos na próxima seção e nos capítulos a seguir.
Seja T : V→W uma transformação linear, em que dimV=n e dimW=m.
Sejam α = {v1, v2, . . . , vn} e β = {w1, w2, . . . , wm} bases de V e W , respec-
tivamente. Como β é uma base de W , podemos determinar de modo único
números reais aij, com 1 ≤ i ≤ n, 1 ≤ j ≤ m, tais que
T (vi) = a1iw1 + · · ·+ ajiwj + · · ·+ amiwm. (1)
Tomemos agora v em V . Temos que v = k1v1 + · · · + knvn, em que ki ∈ Rpara 1 ≤ i ≤ n. Pela linearidade de T e por (1), segue que
T (v) = k1T (v1) + · · ·+ knT (vn)
= k1(a11w1 + · · ·+ am1wm) + · · ·+ kn(a1nw1 + · · ·+ amnwm)
= (a11k1 + · · ·+ a1nkn)w1 + · · ·+ (am1k1 + · · ·+ amnkn)wm.
Logo,
[T (v)]β =
a11k1 + · · ·+ a1nkn...
am1k1 + · · ·+ amnkn
=
a11 · · · a1n...
...
am1 · · · amn
k1...kn
= [T ]αβ · [v]α,
(2)
152 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
onde de�nimos
[T ]αβ =
a11 · · · a1n...
...
am1 · · · amn
.A matriz [T ]αβ , que representa T em relação às bases α e β, é chamada a
matriz de T nas bases α e β. Por (2), temos a expressão
[T (v)]β = [T ]αβ · [v]α para todo v em V . (3)
Observemos que [T ]αβ é uma matriz de ordem m × n tal que, para cada
1 ≤ i ≤ n, a i-ésima coluna de [T ]αβ é dada pelas coordenadas de T (vi) na
base β.
Exemplo 1. Sejam α = {(1, 1), (0, 2)} e β = {(1, 0, 1), (0, 1, 0), (1, 2, 0)},bases de R2 e R3, respectivamente. Calculemos [T ]αβ , onde T : R2 → R3 é
dada por T (x, y) = (2x, x− y, 2y).Como T é uma transformação linear de R2 em R3, [T ]αβ é uma matriz
3× 2, digamos
[T ]αβ =
a11 a12
a21 a22
a31 a32
.Pelo que vimos, a11, a21 e a31 são as coordenadas de T (1, 1) na base β e
a12, a22 e a32 são as coordenadas de T (0, 2) na base β. Ou seja,
T (1, 1) = (2, 0, 2) = a11(1, 0, 1) + a21(0, 1, 0) + a31(1, 2, 0)
e
T (0, 2) = (0,−2, 4) = a12(1, 0, 1) + a22(0, 1, 0) + a32(1, 2, 0).
Equivalentemente,a11 + a31 = 2
a21 + 2a31 = 0
a11 = 2
e
a12 + a32 = 0
a22 + 2a32 = −2
a12 = 4 .

1. MATRIZ DE UMA TRANSFORMAÇÃO LINEAR 153
Resolvendo os sistemas lineares acima, obtemos
a11 = 2, a21 = 0, a31 = 0, a12 = 4, a22 = 6 e a32 = −4.
Portanto,
[T ]αβ =
2 4
0 6
0 −4
.No exemplo anterior, determinamos [T ]αβ a partir da transformação linear
T . No próximo exemplo, vamos considerar o problema inverso: dada a matriz
[T ]αβ , determinar T a partir desta matriz.
Exemplo 2. Sejam α e β as bases dadas no Exemplo 1. Determine a
transformação linear T : R2 → R3 tal que
[T ]αβ =
1 0
1 2
0 1
.Para determinar T usaremos a expressão (3). Assim, computemos inici-
almente [v]α.
Ora, se (x, y) ∈ R2, então
(x, y) = x(1, 1) +
(y − x2
)(0, 2),
o que nos dá
[(x, y)]α =
xy − x2
.Portanto,
[T (x, y)]β =
1 0
1 2
0 1
xy − x2
=
x
yy − x2
e, consequentemente,

154 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
T (x, y) = x(1, 0, 1) + y(0, 1, 0) +
(y − x2
)(1, 2, 0)
=
(y + x
2, 2y − x, x
).
O Exemplo 2 pode ser resolvido por um outro método. De fato, sabemos
que, na base β, a primeira coluna de [T ]αβ nos dá as coordenadas de T (1, 1)
e a segunda coluna nos dá as coordenadas de T (0, 2).
Assim,
T (1, 1) = 1(1, 0, 1) + 1(0, 1, 0) + 0 · (1, 2, 0) = (1, 1, 1)
e
T (0, 2) = 0 · (1, 0, 1) + 2(0, 1, 0) + 1(1, 2, 0) = (1, 4, 0).
Para (x, y) ∈ R2 arbitrário, temos
(x, y) = x(1, 1) +
(y − x2
)(0, 2).
Agora, pela linearidade de T , segue que
T (x, y) = x(1, 1, 1) +
(y − x2
)(1, 4, 0)
=
(y + x
2, 2y − x, x
),
como encontrado anteriormente.
Quando a transformação linear for de um espaço vetorial V nele mesmo,
ela será chamada de operador em V .
Exemplo 3. Consideremos o operador identidade em um espaço vetorial V ;
isto é, o operador de�nido por IV (v) = v para todo v ∈ V .Tem-se que [IV ]
αα é a matriz identidade de ordem n. De fato, para cada
1 ≤ j ≤ n, a j-ésima coluna de [IV ]αα é dada pelas coordenadas de IV (vj) na
base α. Mas, para cada 1 ≤ j ≤ n,
IV (vj) = vj = 0v1 + · · ·+ 0vj−1 + 1vj + 0vj+1 + · · ·+ 0vn,

1. MATRIZ DE UMA TRANSFORMAÇÃO LINEAR 155
o que implica que [IV ]αα é a matriz identidade de ordem n:
[IV ]αα =
1 · · · 0 · · · 0
0 0 0...
......
0 · · · 1 · · · 0...
......
0 · · · 0 · · · 1
.
↑ ↑ ↑coordenadas coordenadas coordenadas
de IV (v1) de IV (vj) de IV (vn)
na base α na base α na base α
Seja T : V → W uma transformação linear entre espaços vetoriais de
dimensão �nita. Vimos que, uma vez �xadas bases α e β de V e W , res-
pectivamente, existe uma única matriz [T ]αβ que representa T nessas bases.
Uma pergunta natural é o que ocorre com a matriz [T ]αβ se diferentes bases
são escolhidas. Consideremos a transformação linear dada no Exemplo 1. Se
α e β são as bases canônicas de R2 e R3, respectivamente, então
[T ]αβ =
2 0
1 −10 2
.Assim, podemos ter matrizes diferentes representando uma mesma trans-
formação linear. Isto deixa bastante claro que, embora uma transformação
linear T : V → W não dependa de bases particulares escolhidas para V e W ,
a matriz associada depende dessas bases.
Terminamos esta seção observando que escolhidas bases quaisquer α e β
de Rn e Rm, respectivamente, uma matriz A ∈ M(m,n) de�ne uma trans-
formação linear T : Rn → Rm como segue:
[T (v)]β = A · [v]α, v ∈ Rn.

156 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
Mais ainda, tem-se que [T ]αβ = A (veja Problema 1.2).
Em particular, se α e β são as bases canônicas de Rn e Rm, respectiva-
mente, então a transformação linear T é chamada transformação multiplica-
ção por A, sendo representada por TA.
Exemplo 4. Seja A = [aij] uma matriz de ordem m× n. Temos que
TA(x1, . . . , xn) =
a11 a12 . . . a1n
a21 a22 . . . a2n...
......
am1 am2 . . . amn
x1
x2...
xn
=
a11x1 + a12x2 + · · ·+ a1nxn
a21x1 + a22x2 + · · ·+ a2nxn...
am1x1 + am2x2 + · · ·+ amnxn
= x1w1 + x2w2 + · · ·+ xnwn,
onde w1, . . . , wn são os vetores colunas da matriz A.
Assim, temos que ImTA é o subespaço de Rm gerado pelas colunas da
matriz A, chamado espaço coluna de A e denotado por C(A). Por outro
lado, o núcleo KerTA de TA é o conjunto solução Sh(A) do sistema linear
homogêneo AX = 0.
Problemas
1.1 Dadas duas transformações lineares T, T ′ : V → W e bases α e β de V e
W , respectivamente, mostre que se [T ]αβ = [T ′]αβ , então T = T ′.
1.2* Sejam dados dois espaços vetoriais V e W de dimensões n e m, respec-
tivamente. Seja α uma base de V e β uma base de W . Dada uma matriz
A ∈M(m,n), considere a função T : V → W de�nida por
[T (v)]β = A[v]α, v ∈ V.

1. MATRIZ DE UMA TRANSFORMAÇÃO LINEAR 157
Mostre que:
(a) T é uma transformação linear;
(b) [T ]αβ = A.
1.3 Sejam A e B matrizes emM(m,n) e β uma base de um espaço vetorial
V . Mostre que se A[v]β = B[v]β para todo v ∈ V , então A = B.
1.4* Sejam T : Rn → Rm uma transformação linear e α e β bases de Rn e de
Rm, respectivamente. Se r é o posto da matriz [T ]αβ , mostre que
dim ImT = r e dimKerT = n− r.
1.5 Dadas as bases α = {(1, 1, 1), (0, 1, 0), (0, 1, 1)} de R3 e β = {(1, 2), (0, 1)}de R2, ache a transformação linear T : R3 → R2 tal que
[T ]αβ =
[1 0 2
−1 −1 1
].
1.6 Dado o operador linear T : R3 → R3, T (x, y, z) = (x−y, y−x, x−z), en-contre [T ]αβ , onde α é a base canônica de R3 e β = {(1, 0, 1), (0, 1, 1), (1, 1, 0)}.
1.7 Seja T : R3 → R3 a multiplicação pela matriz 1 3 4
3 4 7
−2 2 0
.(a) Mostre que KerT é uma reta que passa pela origem e encontre as equações
paramétricas desta reta.
(b) Mostre que ImT é um plano que passa pela origem e encontre a equação
cartesiana deste plano.
1.8 Dado o operador linear T (x, y, z) = (x− 2y+ z,−x+4y− 2z, x) em R3,
com base α = {(1, 0,−1), (0, 1, 2), (1, 2, 0)}, encontre uma base β de R3 tal

158 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
que
[T ]αβ =
1 0 0
0 0 0
0 0 1
.1.9 Seja T : R[x]2 → R[x]2 a transformação linear T (p(x)) = p(2x + 1)
(veja Exemplo 6, Seção 1, Capítulo 5). Encontre [T ]ββ em relação à base
β = {1, x, x2}.
1.10 Suponha que V e W tenham dimensão �nita. Mostre a matriz, em
quaisquer bases de V e de W , da transformação nula 0: V → W é a matriz
nula.
1.11 Seja α = {v1, v2, v3, v4} uma base de um espaço vetorial V . Encontre a
matriz [T ]αα da transformação linear T : V → V de�nida por
T (v1) = v2, T (v2) = v3, T (v3) = v4 e T (v4) = v1.
1.12 Seja T : R2 →M(2, 2) a transformação linear de�nida por
[T ]αβ =
1 −2−1 0
2 1
1 −1
,onde α e β são as bases canônicas de R2 eM(2, 2), respectivamente.
(a) Determine os vetores v ∈ R2 tais que T (v) = I2;
(b) Determine T (3,−1).
2 Operações com Transformações Lineares e Ma-
trizes
Sejam T e T ′ transformações lineares de V emW . Sejam α = {v1, . . . , vn}e β = {w1, . . . , wm} bases de V em W , respectivamente. Estamos interessa-
dos em veri�car se existe alguma relação entre as matrizes [T + T ′]αβ , [T ]αβ e

2. OPERAÇÕES COMTRANSFORMAÇÕES LINEARES EMATRIZES159
[T ′]αβ . Notemos que se 1 ≤ j ≤ n, então
[(T + T ′)(vj)]β = [T (vj) + T ′(vj)]β = [T (vj)]β + [T ′(vj)]β,
mostrando que a j-ésima coluna de [T + T ′]αβ é a soma da j-ésima coluna de
[T ]αβ com a j-ésima coluna de [T ]αβ . Demonstramos assim o seguinte resultado:
Proposição 6.2.1. Sejam T e T ′ transformações lineares de V em W , onde
V e W são espaços vetoriais de dimensão �nita. Se α e β são bases de V e
W , respectivamente, então
[T + T ′]αβ = [T ]αβ + [T ′]αβ .
Deixamos como exercício para o leitor (veja Problema 2.3) demonstrar a
próxima proposição, que é um resultado análogo ao anterior para a multipli-
cação por escalar de transformações lineares.
Proposição 6.2.2. Seja T : V → W uma transformação linear, onde V e
W são espaços vetoriais de dimensão �nita. Se α e β são bases de V e W ,
respectivamente, então
[kT ]αβ = k[T ]αβ ,
onde k é um número real arbitrário.
Decorre, das duas proposições acima, que [T+kT ′]αβ = [T ]αβ+k[T′]αβ , o que
mostra, em virtude dos Problemas 1.1 e 1.2, da Seção 1, que dados espaços
vetoriais V e W , de dimensões respectivamente, n e m, e �xadas bases α de
V e β de W , a aplicação
L(V,W ) → M(m,n)
T 7→ [T ]αβ
é um isomor�smo de espaços vetoriais. Portanto, temos que
dimL(V,W ) = dimM(m,n) = nm.
No próximo resultado veremos que a composta de duas transformações
lineares pode ser representada por um produto de matrizes. Esta é uma das
principais razões da importância do estudo de matrizes.

160 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
Proposição 6.2.3. Sejam T : V → W e S : W → U transformações lineares,
em que V,W e U são espaços vetoriais de dimensão �nita. Se α, β e γ são
bases de V,W e U , respectivamente, então
[S ◦ T ]αγ = [S]βγ · [T ]αβ . (1)
Demonstração Consideremos α = {v1, . . . , vn}. Denotemos por Cj(M) a
j-ésima coluna de uma matriz M arbitrária. Se A e B são matrizes para as
quais a matriz AB está de�nida, segue da de�nição de produto que
Cj(AB) = A · Cj(B). (2)
Para demonstrar (1) basta provar que, para cada j, com 1 ≤ j ≤ n, tem-se
que Cj([S ◦ T ]αγ ) = Cj([S]βγ · [T ]αβ). Ora, �xe um índice j. De (2), segue que
Cj([S]βγ · [T ]αβ) = [S]βγ · Cj([T ]αβ) = [S]βγ · [T (vj)]β.
Por outro lado, de (3), da Seção 1, segue que
Cj([S ◦ T ]αγ ) = [(S ◦ T )(vj)]γ = [S(T (vj))]γ = [S]βγ · [T (vj)]β,
o que prova o desejado. �
Exemplo 1. Sejam T : R2 → R3 e S : R3 → R2 transformações lineares
cujas matrizes são
[T ]αβ =
1 0
2 1
−1 1
e [S]βγ =
[1 0 1
0 0 1
],
sendo α = {(1, 0), (1, 1)}, β = {(1, 1, 1), (1, 0, 1), (0, 0, 1)} e γ = {(1, 0), (0, 2)}.Vamos encontrar a transformação linear S ◦ T .
Para determinarmos S ◦ T , vamos primeiramente determinar [S ◦ T ]αγ .Pela Proposição 6.2.3,
[S ◦ T ]αγ =
[1 0 1
0 0 1
] 1 0
2 1
−1 1
=
[0 1
−1 1
].

2. OPERAÇÕES COMTRANSFORMAÇÕES LINEARES EMATRIZES161
Agora por (3), da Seção 1, temos que, para qualquer (x, y) ∈ R2,
[(S ◦ T )(x, y)]γ =
[0 1
−1 1
][(x, y)]α
=
[0 1
−1 1
][x− yy
]
=
[y
2y − x
]e, consequentemente,
(S ◦ T )(x, y) = y(1, 0) + (2y − x)(0, 2) = (y, 4y − 2x).
Vimos que se T é uma transformação linear bijetiva, T−1 é também uma
transformação linear. O resultado a seguir, que é uma consequência da Pro-
posição 6.2.3, nos apresenta uma relação entre as matrizes que representam
T e T−1, quando �xadas bases do domínio e do contradomínio de T .
Teorema 6.2.4. Seja T : V → W um isomor�smo, onde V e W são espaços
vetoriais de dimensão �nita. Se α é uma base de V e β é uma base de W ,
então
[T−1]βα = ([T ]αβ)−1.
Demonstração Como T−1 é a inversa de T , temos que T−1 ◦ T é a função
identidade em V , ou seja,
T−1 ◦ T = IV .
Pela Proposição 6.2.3,
[IV ]αα = [T−1 ◦ T ]αα = [T−1]βα · [T ]αβ . (3)
Se dimV = n, pelo Exemplo 3, da Seção 1, temos que [IV ]αα é a matriz
identidade de ordem n. Assim, de (3), segue-se que [T ]αβ é invertível e sua
inversa é a matriz [T−1]βα. �
Corolário 6.2.5. Seja T : V → W uma transformação linear, onde V e W
são espaços vetoriais de mesma dimensão �nita. Sejam α e β bases de V

162 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
e W , respectivamente. Temos que T é invertível se, e somente se, a matriz
[T ]αβ é invertível.
Demonstração Uma implicação resulta de (3). A outra, do fato que a
transformação linear L(V,W ) → M(n, n), onde n = dimV = dimW , é
sobrejetora e transforma composição de transformações lineares em produtos
de matrizes.
�
Exemplo 2. Seja T : R2 → R2 a transformação linear dada por T (x, y) =
(4x − 3y,−2x + 2y). Vamos veri�car que T é invertível e vamos encontrar
T−1.
Para veri�carmos que T é invertível, podemos calcular KerT e usar a
Proposição 5.2.4, ou, ainda, podemos calcular [T ]αα, onde α é uma base qual-
quer de R2, e usar o Corolário 6.2.5. Vamos aqui optar pelo segundo método.
Ora, se α é a base canônica de R2, então
[T ]αα =
[4 −3−2 2
].
Utilizando a técnica exposta logo após a Proposição 2.1.7, podemos veri�car
que a matriz acima é invertível e a sua inversa é a matriz[1 3/2
1 2
].
Portanto, devido ao Teorema 6.2.4, temos que
[T−1]αα = ([T ]αα)−1 =
[1 3/2
1 2
].
A transformação linear T−1 é, então, determinada usando a fórmula (3) da
Seção 1, como segue:
[T−1(x, y)]α = [T−1]αα [(x, y)]α =
[1 3/2
1 2
][x
y
]=
[x+ 3
2y
x+ 2y
],

3. OPERADORES LINEARES EM R2 E EM R3 163
o que fornece
T−1(x, y) = (x+3
2y, x+ 2y).
Problemas
2.1 Sejam
A =
1 0 1
0 2 −10 0 1
e B =
1 1 −10 0 1
−1 2 0
.Determine a transformação linear T : R3 → R3 tal que TA = TB ◦ T .
2.2 Considere as matrizes
A =
1 2
0 1
1 −1
e B =
1 1 1
−1 0 0
1 2 1
.Determine:
(a) KerTA; (b) ImTA; (c) KerTB;
(d) ImTB; (e) Ker(TB ◦ TA); (f) Im(TB ◦ TA).
2.3 Prove a Proposição 6.2.2.
3 Operadores Lineares em R2 e em R3
Dentre os operadores lineares mais importantes em R2 e em R3 estão os
que produzem re�exões, projeções e rotações. A seguir, passamos a estudar
alguns destes operadores.
Re�exões Consideremos o operador linear T : R2 → R2, chamado de re�e-
xão em torno do eixo Ox, que transforma cada vetor v = (x, y) ∈ R2 em sua
imagem simétrica em relação ao eixo Ox.Figura 10
Se escrevermos w = T (v) = (w1, w2), obtemos as equações
w1 = x = 1x+ 0y, w2 = −y = 0x− 1y.

164 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
Assim, se α denota a base canônica de R2, segue que
[T (v)]α =
[1 0
0 −1
][v]α.
Em geral, os operadores lineares de R2 ou de R3 que levam cada vetor em
seu simétrico em relação a alguma reta ou plano são chamados de re�exões .
Abaixo, apresentamos algumas das re�exões mais comuns em R2 e R3. Fi-
xamos a notação α para denotar a base canônica de R2 ou de R3.

3. OPERADORES LINEARES EM R2 E EM R3 165
Operador Equações Matriz [T ]αα
Re�exão em torno
do eixo Oy
{w1 = −xw2 = y
[−1 0
0 1
]
Re�exão em torno
da reta y = x
{w1 = y
w2 = x
[0 1
1 0
]
Re�exão em torno
do plano xOy
w1 = x
w2 = y
w3 = −z
1 0 0
0 1 0
0 0 −1
Re�exão em torno
do plano yOz
w1 = −xw2 = y
w3 = z
−1 0 0
0 1 0
0 0 1
Re�exão em torno
do plano xOz
w1 = x
w2 = −yw3 = z
1 0 0
0 −1 0
0 0 1
Projeções Consideremos o operador linear T : R2 → R2 que transforma
cada vetor v = (x, y) ∈ R2 em sua projeção ortogonal sobre o eixo Ox
(Figura 11). Se escrevermos w = T (v) = (w1, w2), obteremos as equações
w1 = x = 1x+ 0y, w2 = 0 = 0x+ 0y.
Assim, se α denota a base canônica de R2, temos
[T (v)]α =
[1 0
0 0
][v]α.
Figura 11
Em geral, uma projeção (ou, mais precisamente, uma projeção ortogonal)
de R2 ou R3 é um operador linear que transforma cada vetor em sua projeção
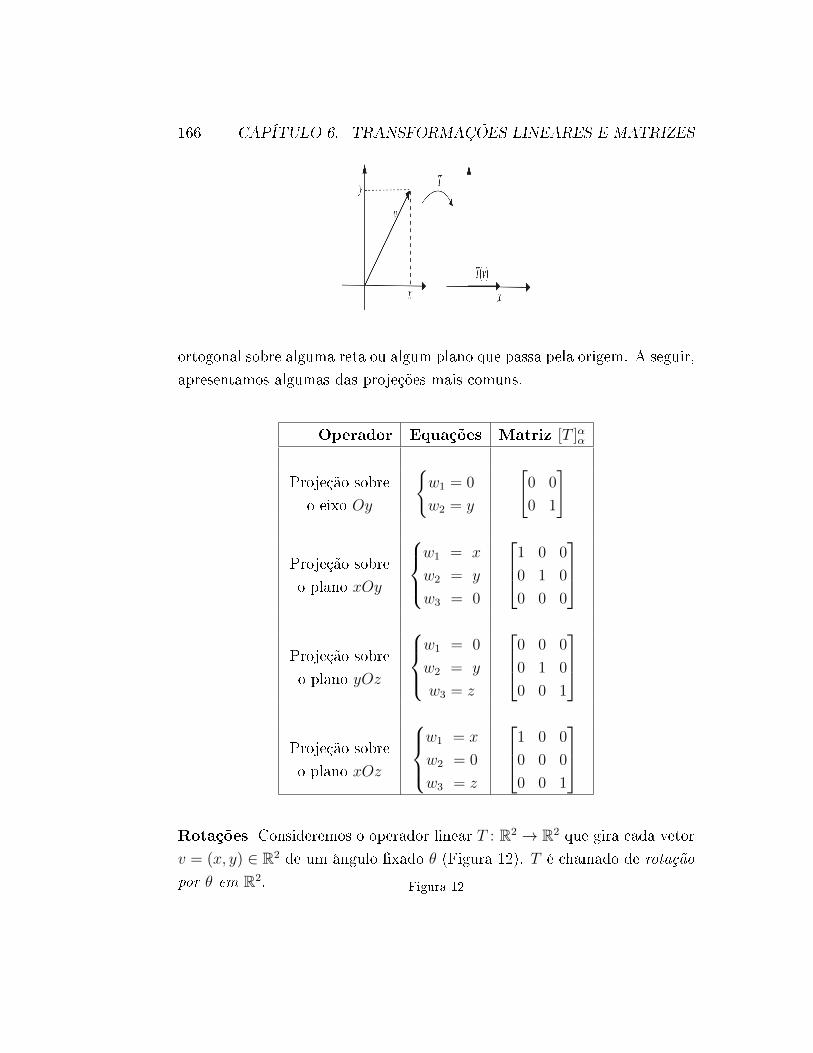
166 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
ortogonal sobre alguma reta ou algum plano que passa pela origem. A seguir,
apresentamos algumas das projeções mais comuns.
Operador Equações Matriz [T ]αα
Projeção sobre
o eixo Oy
{w1 = 0
w2 = y
[0 0
0 1
]
Projeção sobre
o plano xOy
w1 = x
w2 = y
w3 = 0
1 0 0
0 1 0
0 0 0
Projeção sobre
o plano yOz
w1 = 0
w2 = y
w3 = z
0 0 0
0 1 0
0 0 1
Projeção sobre
o plano xOz
w1 = x
w2 = 0
w3 = z
1 0 0
0 0 0
0 0 1
Rotações Consideremos o operador linear T : R2 → R2 que gira cada vetor
v = (x, y) ∈ R2 de um ângulo �xado θ (Figura 12). T é chamado de rotação
por θ em R2. Figura 12
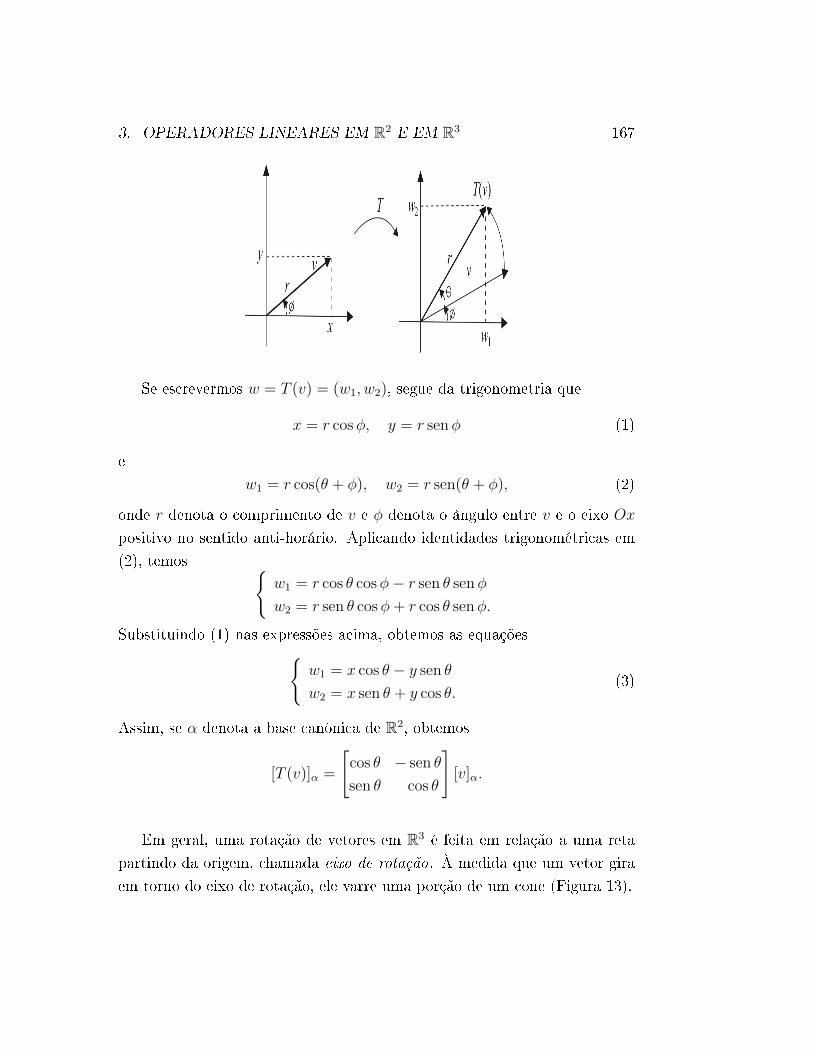
3. OPERADORES LINEARES EM R2 E EM R3 167
Se escrevermos w = T (v) = (w1, w2), segue da trigonometria que
x = r cosφ, y = r senφ (1)
e
w1 = r cos(θ + φ), w2 = r sen(θ + φ), (2)
onde r denota o comprimento de v e φ denota o ângulo entre v e o eixo Ox
positivo no sentido anti-horário. Aplicando identidades trigonométricas em
(2), temos {w1 = r cos θ cosφ− r sen θ senφw2 = r sen θ cosφ+ r cos θ senφ.
Substituindo (1) nas expressões acima, obtemos as equações{w1 = x cos θ − y sen θw2 = x sen θ + y cos θ.
(3)
Assim, se α denota a base canônica de R2, obtemos
[T (v)]α =
[cos θ − sen θ
sen θ cos θ
][v]α.
Em geral, uma rotação de vetores em R3 é feita em relação a uma reta
partindo da origem, chamada eixo de rotação. À medida que um vetor gira
em torno do eixo de rotação, ele varre uma porção de um cone (Figura 13).
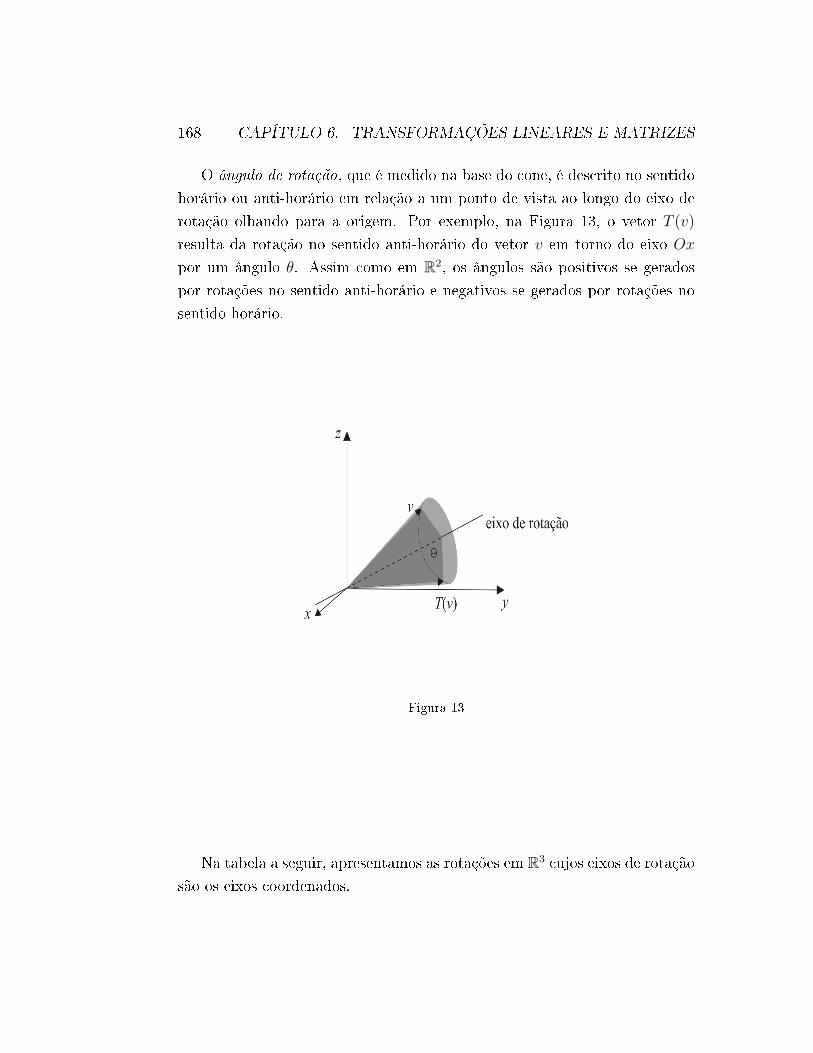
168 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
O ângulo de rotação, que é medido na base do cone, é descrito no sentido
horário ou anti-horário em relação a um ponto de vista ao longo do eixo de
rotação olhando para a origem. Por exemplo, na Figura 13, o vetor T (v)
resulta da rotação no sentido anti-horário do vetor v em torno do eixo Ox
por um ângulo θ. Assim como em R2, os ângulos são positivos se gerados
por rotações no sentido anti-horário e negativos se gerados por rotações no
sentido horário.
Figura 13
Na tabela a seguir, apresentamos as rotações em R3 cujos eixos de rotação
são os eixos coordenados.

3. OPERADORES LINEARES EM R2 E EM R3 169
Operador Equações Matriz [T ]αα
Rotação anti-horária
em torno do eixo Ox
por um ângulo θ
w1 = x
w2 = y cos θ − z sen θw3 = y sen θ + z cos θ
1 0 0
0 cos θ − sen θ
0 sen θ cos θ
Rotação anti-horária
em torno do eixo Oy
por um ângulo θ
w1 = x cos θ + z sen θ
w2 = y
w3 = −x sen θ + z cos θ
cos θ 0 sen θ
0 1 0
− sen θ 0 cos θ
Rotação anti-horária
em torno do eixo Oz
por um ângulo θ
w1 = x cos θ − y sen θw2 = x sen θ + y cos θ
w3 = z
cos θ − sen θ 0
sen θ cos θ 0
0 0 1
Para cada uma das rotações na tabela acima, uma das componentes do
vetor permanece inalterada durante a rotação e a relação entre as duas outras
componentes pode ser deduzida da mesma forma que deduzimos (3).
Sabemos que a multiplicação por escalar de um vetor em R2 e em R3, de-
pendendo do valor do escalar, produz no vetor uma dilatação, contração ou
inversão. Podemos representar estes efeitos geométricos por meio de opera-
dores lineares. De fato, o operador linear Ta : R2 → R2, dado por Ta(v) = av,
em que a ∈ R e v ∈ R2, dilata v, se a ≥ 1; contrai v, se 0 ≤ a < 1; inverte
o sentido de v, se a < 0. No caso particular de a = −1, o operador Ta é
chamado re�exão em torno da origem. O que acabamos de ver vale também
para R3 (Figura 14). Figura 14
Exemplo 1. Determinemos se T1 ◦ T2 = T2 ◦ T1, onde T1 : R2 → R2 é a
projeção ortogonal sobre o eixo Ox e T2 : R2 → R2 é a projeção ortogonal
sobre o eixo Oy.
Como vimos na Seção 2, compor transformações lineares é equivalente a
multiplicar as matrizes que representam estas transformações. Seja α a base

170 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
canônica de R2. Como
[T1]αα =
[1 0
0 0
]e [T2]
αα =
[0 0
0 1
],
segue que T1 ◦ T2 é dada pelo produto[1 0
0 0
][0 0
0 1
]=
[0 0
0 0
](4)
e que T2 ◦ T1 é dada pelo produto[0 0
0 1
][1 0
0 0
]=
[0 0
0 0
]. (5)
De (4) e (5), obtemos que T1 ◦ T2 e T2 ◦ T1 são o operador nulo em R2.
Portanto, T1 ◦ T2 = T2 ◦ T1.
Problemas
3.1* Encontre a matriz na base canônica para a composição de uma rotação
de 90◦ seguida de uma re�exão em torno da reta y = x, em R2.
3.2* Determine a inversa do operador linear em R3 dado por uma re�exão
em torno do plano xOy.
3.3 Sejam T : R2 → R2 a re�exão em torno do eixo Oy e S : R2 → R2 a
re�exão em torno do eixo Ox. Mostre que S ◦ T = T ◦ S.

4. MUDANÇA DE BASE E MATRIZES SEMELHANTES 171
3.4 Sejam T : R2 → R2 a re�exão em torno da reta y = x e S : R2 → R2 a
projeção ortogonal sobre o eixo Oy. Mostre que S ◦ T 6= T ◦ S.
3.5 Mostre que se T : R3 → R3 é uma projeção ortogonal sobre um dos eixos
coordenados, então os vetores T (v) e v − T (v) são ortogonais, para cada v
em R3.
3.6 Seja T : R3 → R3 a projeção ortogonal sobre o plano xOy. Mostre que
uma reta ortogonal ao plano xOy é levada por T a um mesmo ponto deste
plano.
3.7 Determine a matriz na base canônica de T : R2 → R2, em que
(a) T dilata os vetores de R2 por 3, em seguida re�ete estes vetores em torno
da reta y = x e depois projeta estes vetores ortogonalmente sobre o eixo Oy;
(b) T contrai os vetores de R2 por1
2, em seguida gira estes vetores pelo
ânguloπ
4e depois re�ete estes vetores em torno do eixo Ox.
4 Mudança de Base e Matrizes Semelhantes
Um problema comum no estudo de espaços vetoriais de dimensão �nita é
conhecer as relações entre as coordenadas de um vetor em diferentes bases.
Como a noção de base é a generalização para espaços vetoriais arbitrários da
noção de sistemas de coordenadas em R2 e R3, mudar de base é análogo a
mudar de eixos coordenados em R2 ou R3.
Dado um espaço vetorial V arbitrário de dimensão �nita e duas bases α e
β de V , podemos obter uma relação entre as matrizes [v]α e [v]β de um vetor
v em V , usando, para isto, o operador identidade em V .
Com efeito, pela expressão (3) da Seção 1, para todo v ∈ V , temos que
[v]β = [IV ]αβ · [v]α. (1)
A matriz [IV ]αβ é chamada matriz mudança de base de α para β, pois, pela
igualdade (1), ela nos permite obter as coordenadas de um vetor v em V em
relação à base β uma vez conhecidas suas coordenadas na base α.
172 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
Exemplo 1. Considerando a base canônica α de R2 e a outra base β =
{(1, 1), (1, 2)}, temos que
[IR2 ]αβ =
[a1 b1
a2 b2
],
onde a1, a2, b1, b2 são números reais satisfazendo o sistema de equações(1, 0) = a1(1, 1) + a2(1, 2)
(0, 1) = b1(1, 1) + b2(1, 2).
Resolvendo as equações acima, obtemos a1 = 2, a2 = −1, b1 = −1 e
b2 = 1. Portanto,
[IR2 ]αβ =
[2 −1−1 1
].
Seja agora v = (x, y) em R2. Se
[v]β =
[x′
y′
],
então [x′
y′
]=
[2 −1−1 1
][x
y
],
o que garante que
x′ = 2x− y e y′ = −x+ y
são as coordenadas de v na base β. Ou seja,
(x, y) = (2x− y)(1, 1) + (−x+ y)(1, 2).
A Figura 15 ilustra como a determinação do par (2,3) em R2 depende da
base com a qual estamos trabalhando.

4. MUDANÇA DE BASE E MATRIZES SEMELHANTES 173
Figura 15
O próximo resultado mostra que uma matriz mudança de base é invertível
e que sua inversa também é uma matriz mudança de base.
Teorema 6.4.1. Sejam α e β duas bases de um espaço de dimensão �nita
V . Temos que a matriz [IV ]αβ é invertível e sua inversa é a matriz [IV ]βα. Ou
seja,
([IV ]αβ)−1 = [IV ]
βα.
Demonstração Como IV é um isomor�smo e I−1V = IV , o resultado segue
do Teorema 6.2.4. �
Sejam α e β duas bases de um espaço vetorial de dimensão �nita V e T
um operador linear em V . Com as matrizes mudança de base podemos obter
uma relação entre as matrizes [T ]αα e [T ]ββ. De fato, como T = IV ◦T ◦ IV ,segue, da Proposição 6.2.3, que
[T ]αα = [IV ◦T ◦ TV ]αα = [IV ]βα · [T ]
ββ · [IV ]
αβ ,
ou seja
[T ]αα = [IV ]βα · [T ]
ββ · [IV ]
αβ . (2)
No entanto, pelo Teorema 6.4.1, temos que [IV ]βα é a inversa de [IV ]αβ . Assim,
se denotarmos [IV ]αβ por P , a equação (2) pode ser reescrita como
[T ]αα = P−1 [T ]ββ P .

174 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
Com isto, demonstramos o seguinte resultado:
Teorema 6.4.2. Sejam α e β duas bases de um espaço vetorial de dimensão
�nita V . Se T é um operador linear em V , então
[T ]αα = P−1 · [T ]ββ · P, (3)
onde P = [IV ]αβ .
A relação dada na expressão (3) é de tal importância que existe uma ter-
minologia associada a ela. Sejam A e B matrizes quadradas de mesma ordem.
Dizemos que B é semelhante a A, quando existir uma matriz invertível P tal
que B = P−1AP . É fácil veri�car que se uma matriz B é semelhante a uma
matriz A, então A também é semelhante a B. Assim, dizemos simplesmente
que A e B são semelhantes . Por (3), temos que [T ]αα e [T ]ββ são semelhantes.
Exemplo 2. Para veri�car se as matrizes
A =
[5 2
−8 −3
]e B =
[1 2
0 1
]são semelhantes, devemos encontrar uma matriz invertível P tal que
PA = BP.
Se tal matriz P existir, ela necessariamente é uma matriz quadrada de ordem
2; digamos
P =
[x y
z t
].
Assim, [x y
z t
][5 2
−8 −3
]=
[1 2
0 1
][x y
z t
],
o que é equivalente ao sistema linear homogêneo4x− 8y − 2z = 0
2x− 4y − 2t = 0
4z − 8t = 0,

4. MUDANÇA DE BASE E MATRIZES SEMELHANTES 175
que admite a solução não trivial (3, 1, 2, 1). Portanto, obtemos a matriz
invertível
P =
[3 1
2 1
],
que satisfaz A = P−1BP .
Problemas
4.1 Sejam dadas as bases de R2
α = {(1, 1), (0, 2)}, β = {(1, 2), (2, 1)} e γ = {(1, 0), (0, 1)}.
(a) Determine[IR2
]αβ,[IR2
]αγ,[IR2
]γβ.
(b) Se v = (4,−1), encontre [v]β usando uma matriz mudança de base.
4.2 Se[IR2
]αβ=
[−1 2
4 −11
]e β = {(3, 5), (1, 2)}, encontre a base α.
4.3 Determine[IR3
]βα, sabendo que
[IR3
]αβ=
0 1 0
1 1 0
1 1 1
.4.4 Encontre três matrizes semelhantes à matriz[
1 1
−1 2
].
4.5 Mostre que não são semelhantes as matrizes[3 1
−6 −2
]e
[−1 2
1 0
].
4.6 Sejam A e B matrizes semelhantes. Prove que:
(a) At e Bt são semelhantes;
(b) Se A e B são invertíveis, então A−1 e B−1 são semelhantes.

176 CAPÍTULO 6. TRANSFORMAÇÕES LINEARES E MATRIZES
4.7 Mostre que a semelhança de matrizes é uma relação de equivalência, ou
seja: (i) A é semelhante a A; (ii) se A é semelhante a B, então B é semelhante
a A; (iii) se A é semelhante a B e B a C, então A é semelhante a C.
4.8* Seja A = (aij) uma matriz quadrada de ordem n. De�ne-se o traço de
A como
trA = a11 + · · ·+ ann.
a) Mostre que tr :M(n, n)→ R é um funcional linear.
b) Se A,B ∈M(n, n), mostre que
trAB = trBA.
c) Seja T : V → V um operador linear, onde V é um espaço n-dimensional,
e seja α uma base de V . De�na trT = tr[T ]αα. Mostre que esta de�nição
independe da base de V escolhida; ou seja, se β é uma outra base de V , então
tr[T ]αα = tr[T ]ββ. Conclua que assim temos bem de�nido um funcional linear
tr : L(V, V )→ R, de�nido por T 7→ trT .
Bibliogra�a
[1] H. P. Bueno, Álgebra Linear, um segundo curso, Coleção Textos Univer-
sitários, SBM, 2006.
[2] P. Halmos, Teoria Ingênua dos Conjuntos , Editora Ciência Moderna,
2001.
[3] A. Hefez e M. L. T. Villela, Códigos Corretores de Erros , Coleção Mate-
mática e Aplicações, IMPA, 2008.
[4] A. Hefez e M. L. T. Villela, Números Complexos e Polinômios , Coleção
PROFMAT, SBM, 2012.
[5] V. J. Katz, A History of Mathematics - an Introduction, HarperCollins
College Publishers, 1993.
[6] S. Lang, Introduction to Linear Algebra, 2nd edition, Undergraduate Texts
in Mathematics, Springer, 1986.
[7] E.L. Lima, Álgebra Linear , 3a edição, Coleção Matemática Universitária,
IMPA, 1998.
[8] E.L. Lima, Geometria Analítica e Álgebra Linear , 2a edição, Coleção
Matemática Universitária, IMPA, 2010.
300