Embed Size (px)
Citation preview
Mécanique Newtonienne du point M2
Bases de la dynamique Newtonienne
1
1 Définitions 11.1 Masse inertielle ou simplement masse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Quantité de mouvement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 Postulat de la dynamique : les 3 lois de Newton 22.1 Première loi de Newton : principe d’inertie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22.2 Deuxième loi de Newton : le principe fondamental de la dynamique . . . . . . . . . . . . . . . 32.3 Troisième loi de Newton : le principe des interactions réciproques . . . . . . . . . . . . . . . . 4
3 Référentiels galiléens 53.1 Critères expérimentaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53.2 Exemples de Référentiels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
4 Interactions fondamentales 74.1 Interaction gravitationnelle de Newton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74.2 Interaction électromagnétique, force électrostatique de Coulomb . . . . . . . . . . . . . . . . . 84.3 Interaction forte et interaction faible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
5 Exemples de forces 85.1 Poids d’un points matériel de masse m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85.2 Force de rappel d’un ressort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95.3 Tension d’un fil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95.4 Forces de contact entre solides ⇒ Réaction du support . . . . . . . . . . . . . . . . . . . . . . 95.5 Forces exercées par un fluide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
6 Méthode : application du principe fondamental de la dynamique 12
7 Cas particulier : Principe fondamental de la statique 12

8 Exemples d’application des lois de Newton 138.1 La chute libre sans frottement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138.2 Chute libre avec frottement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178.3 Mouvement d’une masse accrochée à un ressort . . . . . . . . . . . . . . . . . . . . . . . . . . 208.4 Point mobile sans frottement sur une sphère . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228.5 Équilibre d’un point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
Dynamique : Prévision du mouvement des corps dans un environnement donné.On ne s’intéresse ici qu’à la mécanique du point : le système est assimilable à un point matériel.
1. Définitions
Modèle du point matériel : corps dont les dimensions sont suffisamment petites pour être assimiléà un point, c’est à dire dont les dimensions sont faibles par rapport à la distance séparant le corpsobservé et l’observateur.
Définition
1.1. Masse inertielle ou simplement masse
Constat : il est plus difficile de communiquer une vitesse à un ballon de football qu’à une balle de tennis. De lamême manière, il sera plus difficile de stopper le mouvement du ballon que celui de la balle de tennis.⇒ La vitesse ne suffit donc pas pour décrire le mouvement d’un corps. Il faut introduire une grandeur liée à son
................On associera donc à un point matériel, un scalaire positif noté ...., appelé ................................. ou plus sim-
plement ........... qui est constant dans le temps et indépendant du référentiel d’étude en mécanique classique.
La masse d’un point matériel est liée à la difficulté de modifier sa vitesse
........................................................................................................................................................................
..................
Propriétés de la masse
⋄ la masse est une grandeur extensive c’est à dire ..................
⋄ la masse est une grandeur .........................................................................
⋄ la masse s’exprime en .......................
1.2. Quantité de mouvement
• Quantité de mouvement d’un point matériel
Soit un point matériel M de masse m, de vitesse −→v dans un référentiel R.
La quantité de mouvement −→p du point matériel M est définie par :
........................
La quantité de mouvement a pour dimension ............. et s’exprime en ..............
Définition
La quantité de mouvement dépend du référentiel d’étude car −→v en dépend.On devrait noter : −→p (M/R)
Lycée SainteGeneviève 2020/2021 page 1/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
• Quantité de mouvement de 2 points matérielsLorsque le système étudié est constitué de plusieurs points matériels, on peut définir sa quantité demouvement comme la somme des quantités de mouvement de chacun des points matériels qui constituele système.
La quantité de mouvement d’un système constitué de plusieurs points matériels est égale à la quantitéde mouvement de son centre de gravité affecté de la masse totale m et animé de la vitesse −→vG :
−→p = m−→vG
2. Postulat de la dynamique : les 3 lois de Newton
Un postulat est une proposition non démontrée et indémontrable sur laquelle s’appuie une théorie. L’accepterparaît raisonnable dès lors que ce qui en découle permet d’expliquer ou de prédire les phénomènes naturels quinous entourent.
En mécanique classique, ce sont les 3 lois de Newton :
⋄ 1ere Loi : principe d’inertie (Galilée)
⋄ 2e Loi ou principe fondamental de la dynamique : indique comment la vitesse change enfonction de forces extérieures (concept totalement nouveau à l’époque).
⋄ 3e Loi : actions réciproques.
Lois de Newton
Le domaine de la mécanique classique est celui des vitesses négligeables devant la vitesse de la lumière dansle vide (v ≪ 3.108 m · s−1 ).
2.1. Première loi de Newton : principe d’inertie
2.1.1. Système isolé
Système : corps ou ensemble de corps que l’on étudie, délimité par une surface réelle ou virtuelle. Ce quin’appartient pas au système est appelé milieu extérieur.
Lycée SainteGeneviève 2020/2021 page 2/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
Un système est isolé ...................................................................
Un point matériel isolé ne peut exister au voisinage de la Terre à cause de l’attraction terrestre. On pourra consi-dérer des points matériels pseudo-isolés pour lesquels les forces appliquées sont négligeables ou se compensent.
Exemples : ................................................................................................
2.1.2. Énoncé de la première loi de Newton : principe d’inertie
Principe d’inertie ou 1ère loi de Newton :
Il existe une classe privilégiée de référentiels, appelés référentiels galiléens, par rapport auxquels unpoint matériel isolé ou pseudo-isolé est :
⋄ soit au repos
⋄ soit animé d’un mouvement rectiligne uniforme −→v =−−→cste
Principe d’inertie
Ce principe d’inertie définit en même temps ce qu’est un référentiel galiléen, il n’y a pas d’autre façon de définirun référentiel galiléen.
2.2. Deuxième loi de Newton : le principe fondamental de la dynamique
2.2.1. Force et moment d’un force par rapport à un point
• ForceOn appelle force toute cause capable de modifier le mouvement d’un corps, ou encore de créer une dé-formation.Une force s’exprime en ............. dans le système international d’unités, symbole ....
Une force est caractérisée par :➪ ..................................................................................
➪ ..................................................................
➪ ..........................................................................................
Dans certains cas particuliers, la force n’est pas répartie mais localisée. Dans ces cas, elle est appliquée enun point précis de l’objet qu’on appelle le point d’application.
• Moment d’une forceLe moment en O noté
−−→M0 de la force
−→F appliquée en M est : ..................................
Lycée SainteGeneviève 2020/2021 page 3/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
2.2.2. Énoncé du principe fondamental de la dynamique (ou 2ème loi de Newton)
Énoncé du principe fondamental de la dynamique ou 2ème loi de Newton :Par rapport à un référentiel supposé galiléen R, la dérivée par rapport au temps du vecteur quantitéde mouvement d’un point matériel M est égale à la somme des forces extérieures appliquées à cepoint :
...................................
où∑ −→
F représente la somme des forces extérieures agissant sur le point M.
On appelle forces extérieures l’ensemble des actions exercées sur M de la part de tous les autres objets del’univers. La mécanique classique postule l’additivité des forces : si M est soumis à deux forces décrites par :
−→f1
et−→f2 , l’action subie par M est décrite par
−→f1 +
−→f2)
Remarque : La propriété qu’a la masse d’intervenir dans le principe fondamental s’appelle l’inertie car, pour
deux points matériels, initialement au repos dans R, soumis à la même force−→F , celui dont la masse est la plus
grande acquiert l’accélération la plus faible : son aptitude à s’opposer à l’effet de−→F est donc plus grande ; on
dit que son inertie est plus grande.
Si la masse m du point matériel M est constante, alors le principe fondamental de la dynamiques’écrit dans R référentiel galiléen :
......................................
2.3. Troisième loi de Newton : le principe des interactions réciproques
La loi fondamentale de la dynamique permet de décrire le mouvement d’un point matériel. Pour décrire le mou-vement d’un ensemble de points matériels, un postulat supplémentaire est nécessaire : c’est la loi des actionsréciproques. Cette loi est complètement remise en question par la théorie de la relativité.
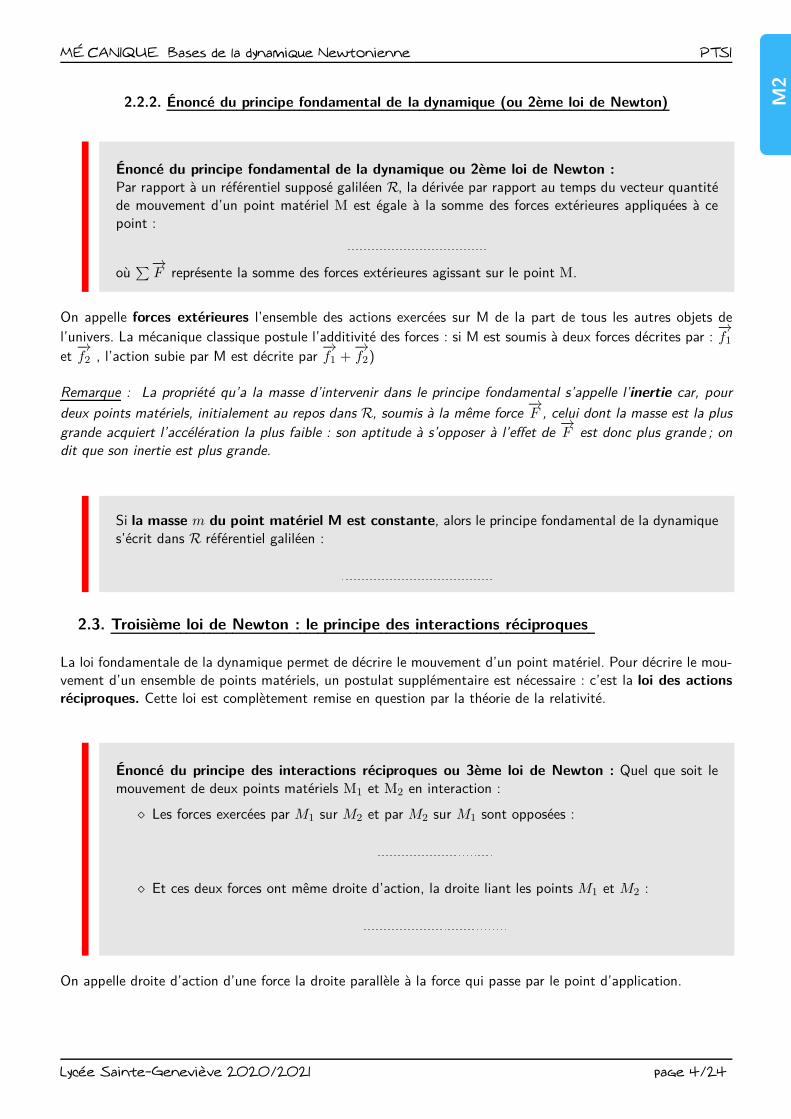
Énoncé du principe des interactions réciproques ou 3ème loi de Newton : Quel que soit lemouvement de deux points matériels M1 et M2 en interaction :
⋄ Les forces exercées par M1 sur M2 et par M2 sur M1 sont opposées :
.............................
⋄ Et ces deux forces ont même droite d’action, la droite liant les points M1 et M2 :
....................................
On appelle droite d’action d’une force la droite parallèle à la force qui passe par le point d’application.
Lycée SainteGeneviève 2020/2021 page 4/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
M1
M1
M2
M2
−→F 2→1
−→F 2→1
−→F 1→2
−→F 1→2
Si l’on considère la Terre assimilable à un point matériel T de masse MT et un point matériel M de masse
m ≪ MT . D’après le principe des actions réciproques−−−→FT/M = −
−−−→FM/T mais M et T ont-ils la même
accélération ?
Application 1
3. Référentiels galiléens
3.1. Critères expérimentaux
Comment savoir si un référentiel est galiléen ou pas ?⇒ Il faut réaliser un grand nombre d’expériences et vérifier que rien ne vient contredire le principe d’inertie.
On montre qu’un référentiel en translation rectiligne et uniforme par rapport à un référentielgaliléen est lui aussi galiléen.
3.2. Exemples de Référentiels
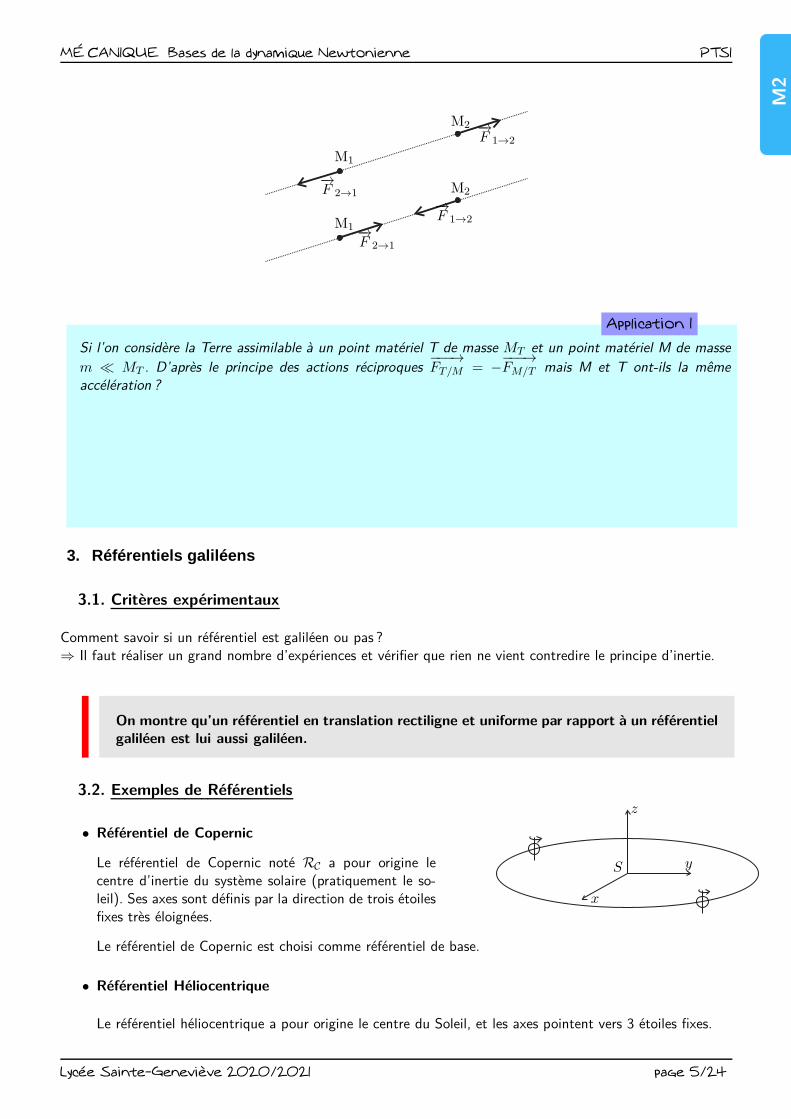
• Référentiel de Copernic
Le référentiel de Copernic noté RC a pour origine lecentre d’inertie du système solaire (pratiquement le so-leil). Ses axes sont définis par la direction de trois étoilesfixes très éloignées.
x
y
z
S
Le référentiel de Copernic est choisi comme référentiel de base.
• Référentiel Héliocentrique
Le référentiel héliocentrique a pour origine le centre du Soleil, et les axes pointent vers 3 étoiles fixes.
Lycée SainteGeneviève 2020/2021 page 5/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
• Référentiel Géocentrique
Le référentiel géocentrique, souvent noté RG est lié aucentre d’inertie de la Terre, ses axes ont des directionsfixes par rapport au référentiel de Copernic. (T, x, y, z).RG est donc animé dans RC d’un mouvement de trans-lation, mais comme T décrit une trajectoire elliptiqueautour de S (proche d’un cercle), RG n’est pas rigoureu-sement galiléen.
x
x y
y
z
S
Tz Étoile polaire
Ce référentiel est supposé galiléen lorsque l’on étudie le mouvement des satellites, des avions, de tout cequi évolue autour de la Terre d’une manière générale.
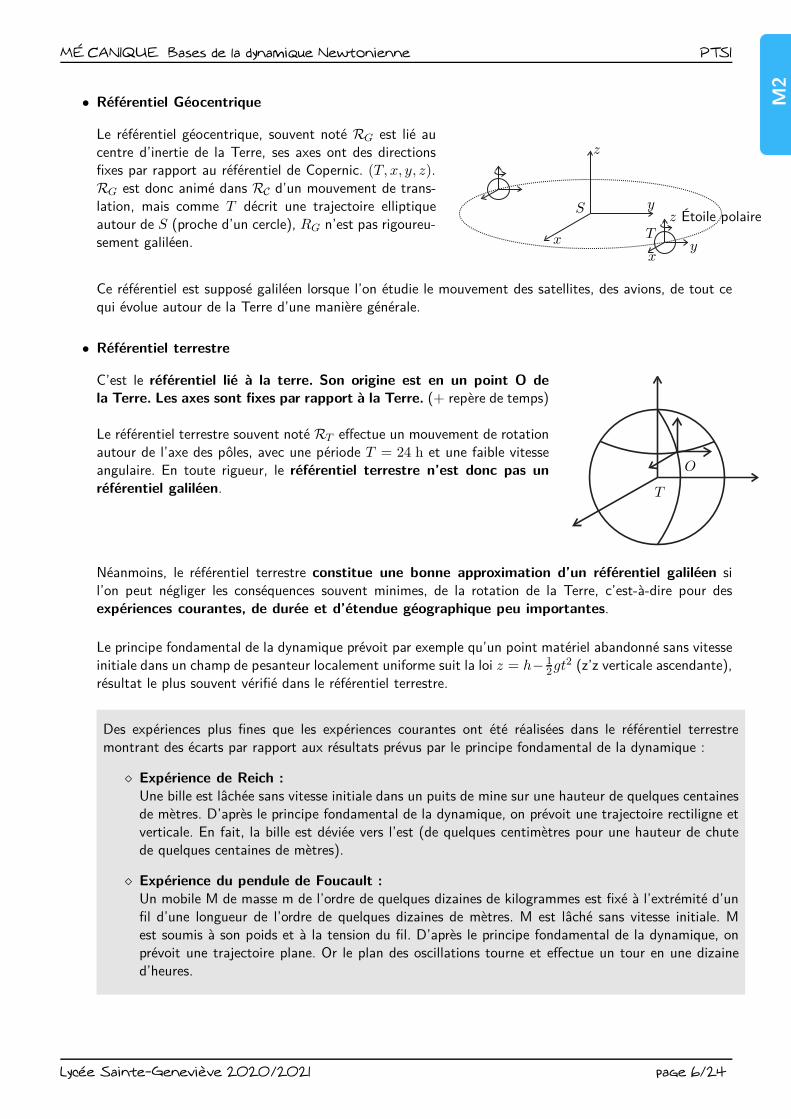
• Référentiel terrestre
C’est le référentiel lié à la terre. Son origine est en un point O dela Terre. Les axes sont fixes par rapport à la Terre. (+ repère de temps)
Le référentiel terrestre souvent noté RT effectue un mouvement de rotationautour de l’axe des pôles, avec une période T = 24 h et une faible vitesseangulaire. En toute rigueur, le référentiel terrestre n’est donc pas unréférentiel galiléen.
O
T
Néanmoins, le référentiel terrestre constitue une bonne approximation d’un référentiel galiléen sil’on peut négliger les conséquences souvent minimes, de la rotation de la Terre, c’est-à-dire pour desexpériences courantes, de durée et d’étendue géographique peu importantes.
Le principe fondamental de la dynamique prévoit par exemple qu’un point matériel abandonné sans vitesseinitiale dans un champ de pesanteur localement uniforme suit la loi z = h− 1
2gt2 (z’z verticale ascendante),résultat le plus souvent vérifié dans le référentiel terrestre.
Des expériences plus fines que les expériences courantes ont été réalisées dans le référentiel terrestremontrant des écarts par rapport aux résultats prévus par le principe fondamental de la dynamique :
⋄ Expérience de Reich :Une bille est lâchée sans vitesse initiale dans un puits de mine sur une hauteur de quelques centainesde mètres. D’après le principe fondamental de la dynamique, on prévoit une trajectoire rectiligne etverticale. En fait, la bille est déviée vers l’est (de quelques centimètres pour une hauteur de chutede quelques centaines de mètres).
⋄ Expérience du pendule de Foucault :Un mobile M de masse m de l’ordre de quelques dizaines de kilogrammes est fixé à l’extrémité d’unfil d’une longueur de l’ordre de quelques dizaines de mètres. M est lâché sans vitesse initiale. Mest soumis à son poids et à la tension du fil. D’après le principe fondamental de la dynamique, onprévoit une trajectoire plane. Or le plan des oscillations tourne et effectue un tour en une dizained’heures.
Lycée SainteGeneviève 2020/2021 page 6/24

M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
◮ Distinction entre référentiels galiléens et non galiléensSoit R un référentiel galiléen et R1 un référentiel en mouvement quelconque dans R. D’un point de vue cinéma-tique les deux référentiels sont interchangeables mais la non réciprocité dynamique apparaît de façon évidentedans les faits les plus courants.
Exemple du seau de Newton :
Un seau contenant de l’eau est au repos dans Rgaliléen. La surface du liquide est plane (perpendiculaireau champ de pesanteur). On le fait tourner autour d’unaxe vertical à la vitesse ω constante. Sa surface prendun profil à peu près parabolique.
Si maintenant le seau reste immobile dans R et quel’observateur tourne à la vitesse −ω autour de l’axe duseau. : le seau tourne toujours à la vitesse ω par rap-port à l’observateur (réciprocité cinématique des deuxproblèmes), mais la surface du liquide est plane : nonréciprocité dynamique.
4. Interactions fondamentales
L’ensemble des phénomènes connus peut-être interprété par au plus quatre interactions physiques.
4.1. Interaction gravitationnelle de Newton
Deux points matériels M1 et M2 de masses m1 et m2 distants de r12
exercent l’un sur l’autre une force appelée force de gravitation, telle que :
......................................................................................................
Avec −→u 12 vecteur unitaire dirigé de M1 vers M2 sur la droite (M1M2).
G constante gravitationnelle G = 6, 67.10−11Nm2kg−2
M2
M1
m2
m1
r12
−→F M1→M2
−→u 12
−→u 12
−−−−→M1M2 = r12
−→u 12−→F M1→M2
= −−→F M2→M1
La force de gravitation est donc une force toujours ......................
La loi de Newton permet de décrire avec une très bonne précision les mouvements des planètes du systèmesolaire (les écarts observés sont interprétés à l’aide de la relativité générale).
Lycée SainteGeneviève 2020/2021 page 7/24

M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
4.2. Interaction électromagnétique, force électrostatique de Coulomb
Le point matériel M1 de charge q1 exerce sur le point matériel M2 de charge q2
distant de r12 la force−→F M1→M2
:
...............................................
Avec−−−−→M1M2 = r12
−→u 12 ,−→F M1→M2
= −−→F M2→M1
.
q1 et q2 charges électriques respectivement de M1 et M2 en ...............
ε0 permittivité du vide ε0 =1
36π109≃ 8, 85.10−12F/m
M2
M1
q2
q1
r12
−→F M1→M2
−→u 12
−→u 12
• Si q1 et q2 sont de signe contraire, q1 · q2 < 0, la force est ..................... suivant ...−→u 12.
Les deux charges .....................
• Si q1 et q2 sont de même signe, q1 · q2 > 0, la force est ................... suivant ...−→u 12.
Les deux charges se ......................
4.3. Interaction forte et interaction faible
⋄ Interaction forte :Cette interaction rend compte de la stabilité des noyaux malgré l’intense répulsion électrostatique entreles protons. Il s’agit d’une interaction attractive entre nucléons (quelle que soit leur charge), elle est ex-trêmement intense à des distances de l’ordre de 10−15 m et devient négligeable à plus d’une dizaine de fm.
⋄ Interaction faible (1930)Elle a été introduite pour expliquer les phénomènes de désintégration. C’est aussi une interaction de faibleportée.
5. Exemples de forces
5.1. Poids d’un points matériel de masse m
La force de pesanteur ou poids d’un corps estdue principalement, mais pas exclusivement à laforce de gravitation terrestre.
.....................
où m est la masse du corps et −→g le champ de
pesanteur. La norme de ‖−→g ‖ vaut .....................et sa direction définit la verticale.
Lycée SainteGeneviève 2020/2021 page 8/24

M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
5.2. Force de rappel d’un ressort
M
M0
M0
ℓ0
O
O
x
−→F −→e x
−→e x
Un ressort se caractérise par sa raideur k et salongueur à vide ℓ0
Une masse M, accrochée à l’une des extrémités d’unressort subit de la part de celui-ci une force de rappelélastique :
.........................................
Un ressort est idéal s’il a une masse nulle et s’il est linéaire (k = cste).
5.3. Tension d’un fil
Le fil exerce une force sur le point M. Cette force ne peut exister que dans le sens de l’attraction : on ne peutpas pousser avec un fil.
Soit un point matériel M de masse m accroché à l’extrémité d’un filsouple de masse négligeable. La longueur du fil tendu doit rester constantetout au long du mouvement de M (fil inextensible). Ce fil retient M parl’intermédiaire de la tension
−→T dirigée suivant la direction du fil.
−→T = −T −→er
T = ‖−→T ‖ est à priori inconnue et dépend du mouvement de M.
Mtrajectoire de M
−→T
filO
−→v M
Fil idéal : Masse nulle, raideur infinie quand il est sous tension.
5.4. Forces de contact entre solides ⇒ Réaction du support
• Une particule est soumise à une liaison lorsqu’elle est destinée à se déplacersur une courbe ou sur une surface. Cela se traduit par :
⋄ des relations supplémentaires entre les variables d’espace.
⋄ des forces exercées par le support sur la particule :
Réaction du support :−→R =
−→R N +
−→RT
• Frottement : On définit le coefficient de frottement f (caractéristique dessolides mis en jeu)
‖−→R T ‖ ≤ f‖
−→R N ‖
⋄ En cas de glissement et si les solides sont en mouvement relatif, l’égalité est réalisée et la force−→R T est
opposée à la vitesse :−→R T ∧ −→v =
−→0 et
−→R T .−→v ≤ 0
‖−→RT ‖ = f‖
−→RN ‖
⋄ En cas d’équilibre, l’égalité peut ne pas être réalisée, et la force−→RT peut avoir n’importe quelle orientation
dans le plan de contact.
Lycée SainteGeneviève 2020/2021 page 9/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
⋄ Pour un objet immobile, la réaction tangen-tielle ne peut excéder f.RN .
⋄ Pour un objet en mouvement, la réactiontangentielle s’oppose au vecteur vitesse etprésente un module proportionnel à la réac-tion normale
RT = f.RN
• Absence de frottement : la réaction est normale au support. f = 0. On dit que la liaison est parfaite ousans frottement. Dans ce cas :
−→RT =
−→0 et
−→R =
−→RN
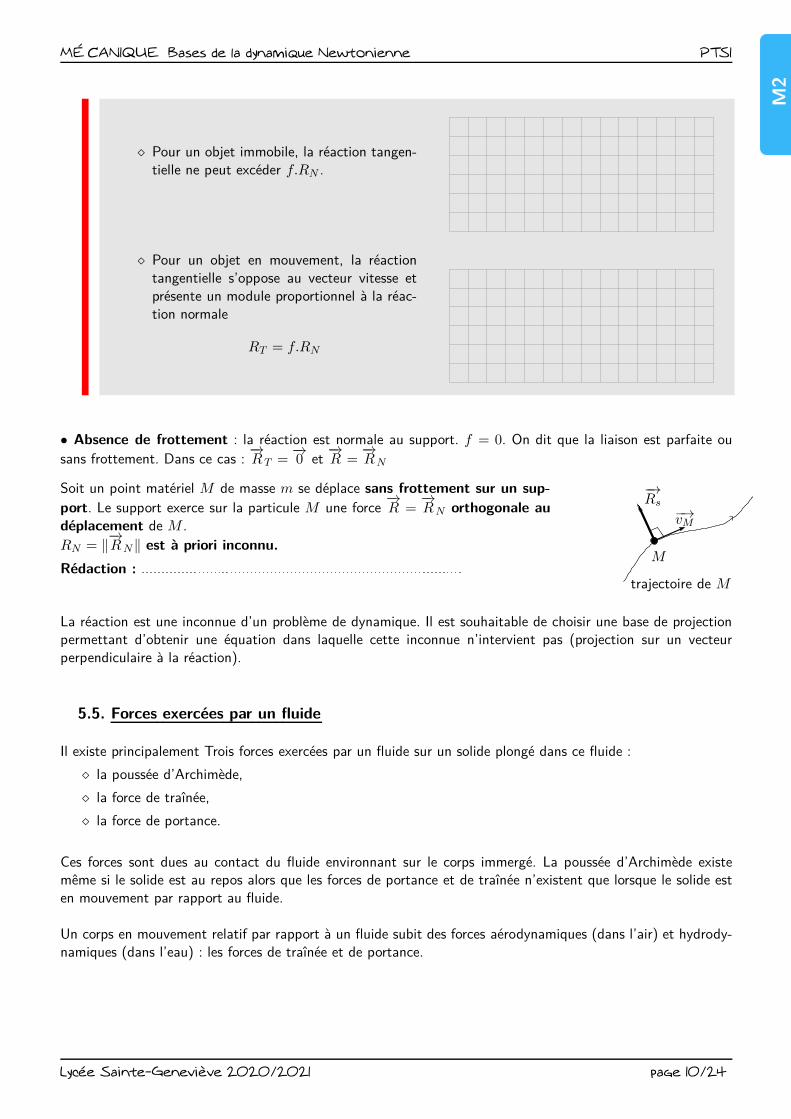
Soit un point matériel M de masse m se déplace sans frottement sur un sup-port. Le support exerce sur la particule M une force
−→R =
−→R N orthogonale au
déplacement de M .RN = ‖
−→R N‖ est à priori inconnu.
Rédaction : ................................................................................M
trajectoire de M
−→Rs
−→vM
La réaction est une inconnue d’un problème de dynamique. Il est souhaitable de choisir une base de projectionpermettant d’obtenir une équation dans laquelle cette inconnue n’intervient pas (projection sur un vecteurperpendiculaire à la réaction).
5.5. Forces exercées par un fluide
Il existe principalement Trois forces exercées par un fluide sur un solide plongé dans ce fluide :
⋄ la poussée d’Archimède,
⋄ la force de traînée,
⋄ la force de portance.
Ces forces sont dues au contact du fluide environnant sur le corps immergé. La poussée d’Archimède existemême si le solide est au repos alors que les forces de portance et de traînée n’existent que lorsque le solide esten mouvement par rapport au fluide.
Un corps en mouvement relatif par rapport à un fluide subit des forces aérodynamiques (dans l’air) et hydrody-namiques (dans l’eau) : les forces de traînée et de portance.
Lycée SainteGeneviève 2020/2021 page 10/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
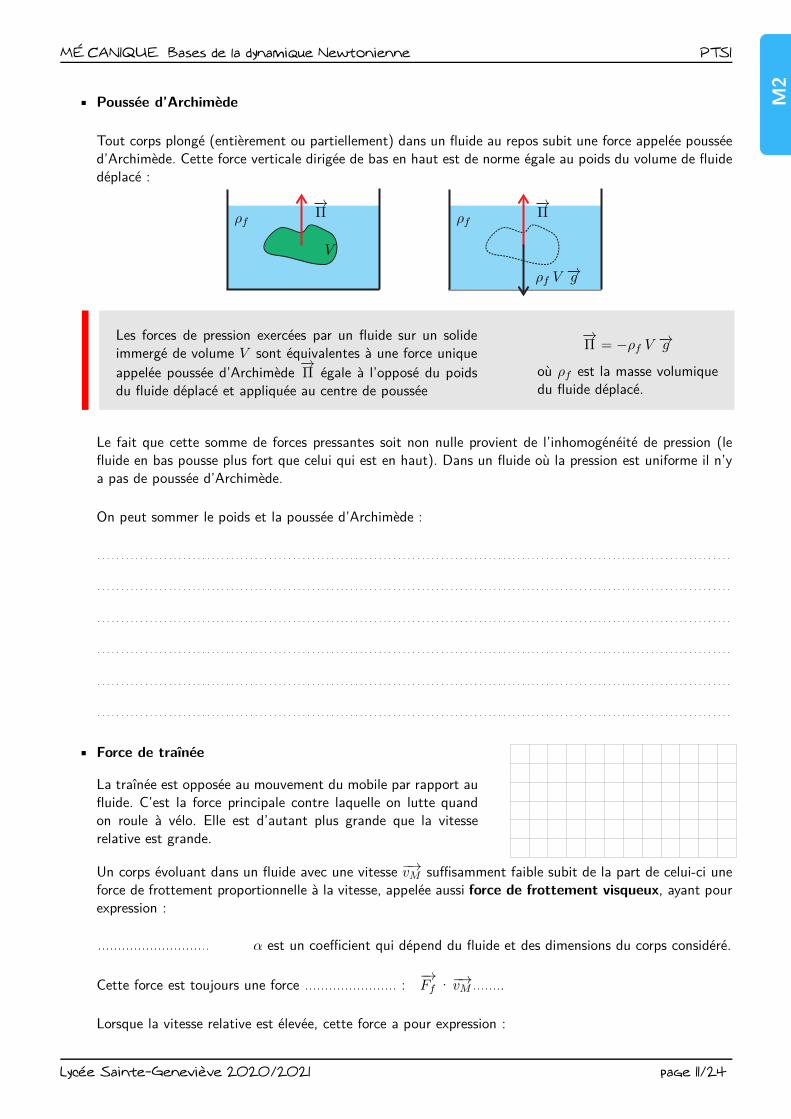
• Poussée d’Archimède
Tout corps plongé (entièrement ou partiellement) dans un fluide au repos subit une force appelée pousséed’Archimède. Cette force verticale dirigée de bas en haut est de norme égale au poids du volume de fluidedéplacé :
ρfρf
−→Π
−→Π
ρf V −→g
V
Les forces de pression exercées par un fluide sur un solideimmergé de volume V sont équivalentes à une force uniqueappelée poussée d’Archimède
−→Π égale à l’opposé du poids
du fluide déplacé et appliquée au centre de poussée
−→Π = −ρf V −→g
où ρf est la masse volumiquedu fluide déplacé.
Le fait que cette somme de forces pressantes soit non nulle provient de l’inhomogénéité de pression (lefluide en bas pousse plus fort que celui qui est en haut). Dans un fluide où la pression est uniforme il n’ya pas de poussée d’Archimède.
On peut sommer le poids et la poussée d’Archimède :
• Force de traînée
La traînée est opposée au mouvement du mobile par rapport aufluide. C’est la force principale contre laquelle on lutte quandon roule à vélo. Elle est d’autant plus grande que la vitesserelative est grande.
Un corps évoluant dans un fluide avec une vitesse −→vM suffisamment faible subit de la part de celui-ci uneforce de frottement proportionnelle à la vitesse, appelée aussi force de frottement visqueux, ayant pourexpression :
............................ α est un coefficient qui dépend du fluide et des dimensions du corps considéré.
Cette force est toujours une force ....................... :−→Ff · −→vM ........
Lorsque la vitesse relative est élevée, cette force a pour expression :
Lycée SainteGeneviève 2020/2021 page 11/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
• Force de portance
La portance est perpendiculaire au mouvement du mobile parrapport au fluide. C’est grâce à cette force que les avions volent.
6. Méthode : application du principe fondamental de la dynam ique
1. Définir le système à étudier et l’isoler.
2. Préciser la nature du référentiel d’étude.
3. Faire un schéma.
4. Choisir un système de coordonnées adaptées et une base de projection (pour les forces etl’accélération) et l’indiquer sur le schéma.
5. Effectuer le bilan des forces et les représenter sur un schéma.
6. Écrire l’expression de l’accélération dans la base choisie.
7. Énoncer la deuxième loi de Newton et écrire son expression vectorielle.
8. La projeter sur la base adaptée
9. Résoudre les équations différentielles, prendre en compte les conditions initiales.
10. Analyser le résultat.
Methode
7. Cas particulier : Principe fondamental de la statique
Un point est en équilibre dans un référentiel R si sa vitesse reste indéfiniment nulle.
∑ −→F =
−→0 et −→v (t0) =
−→0
• Équilibre stable : la force qui apparaît lorsqu’on écarte infini-ment peu le point de sa position d’équilibre a tendance à l’yramener.
• Équilibre instable : la force qui apparaît lorsqu’on écarte in-finiment peu le point de sa position d’équilibre a tendance àl’en éloigner.
Lycée SainteGeneviève 2020/2021 page 12/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
• Équilibre indifférent : aucune force n’apparaît lorsqu’on écartela particule de sa position d’équilibre.
8. Exemples d’application des lois de Newton
8.1. La chute libre sans frottement
Chute libre d’un projectile de masse m SANS frottement - vitesse initiale −→v 0
1. Système : .................................................................
2. Référentiel : .................................................................................
3. Schéma :
4. Repère de projection : .......................................
.............................................................................
........... :
5. Bilan des forces : ..........................................
6. PFD .................................................... :
m.−→a =∑ −→
F
7. Projection
Application 2
Lycée SainteGeneviève 2020/2021 page 13/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
8 Résolution
Equation cartésienne de la trajectoire :
Lycée SainteGeneviève 2020/2021 page 14/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
9. Analyse du résultat :
⋄ Altitude maximale
⋄ Portée du projectile
⋄ Parabole de sécurité
Lycée SainteGeneviève 2020/2021 page 15/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
Lycée SainteGeneviève 2020/2021 page 16/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
8.2. Chute libre avec frottement
Chute libre d’un projectile de masse m AVEC frottement - vitesse initiale −→v 0
1. Système : .................................................................
2. Référentiel : .................................................................................
3. Schéma :
4. Repère de projection : .......................................
.............................................................................
........... :
5. Bilan des forces :
⋄ ..........................................
⋄ ..................................................................
6. PFD .................................................... :
7. Projection
Application 3
Lycée SainteGeneviève 2020/2021 page 17/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
8. Résolution
Lycée SainteGeneviève 2020/2021 page 18/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
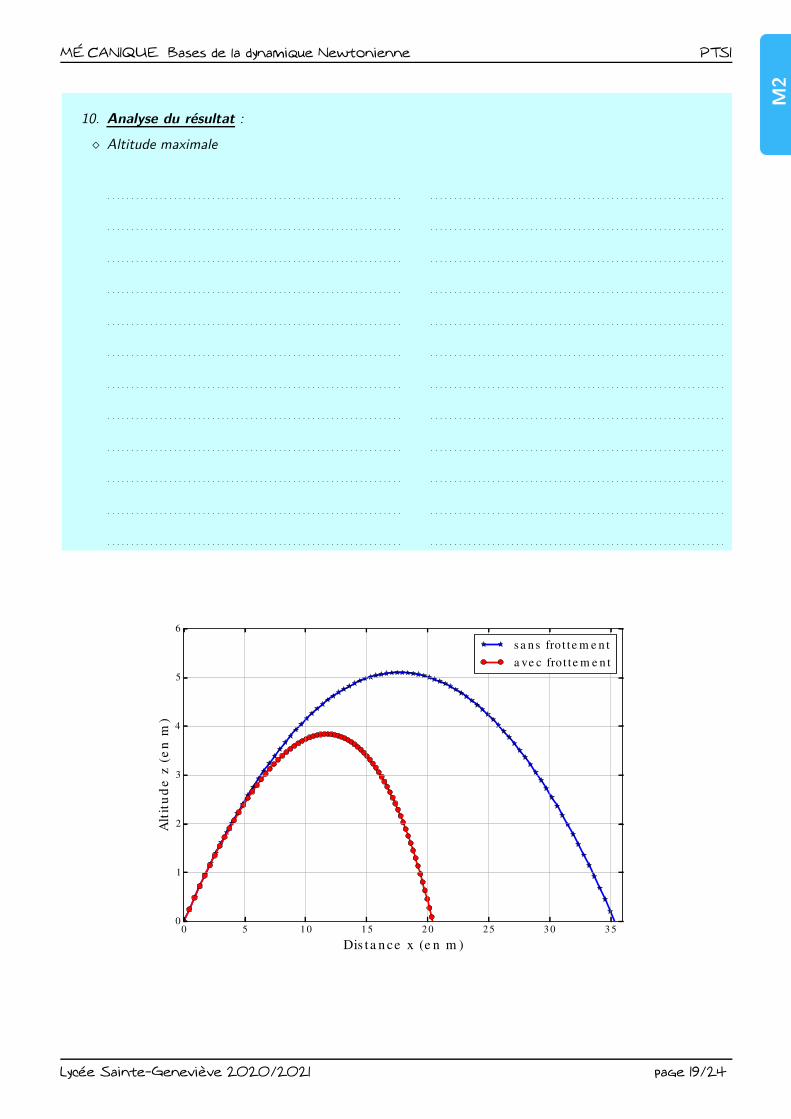
10. Analyse du résultat :
⋄ Altitude maximale
0 5 1 0 1 5 2 0 2 5 3 0 3 5
Dis ta n ce x (e n m )
0
1
2
3
4
5
6
Alt
itu
de
z (
en
m)
s a n s fro t te m e n t
a ve c fro t te m e n t
Lycée SainteGeneviève 2020/2021 page 19/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
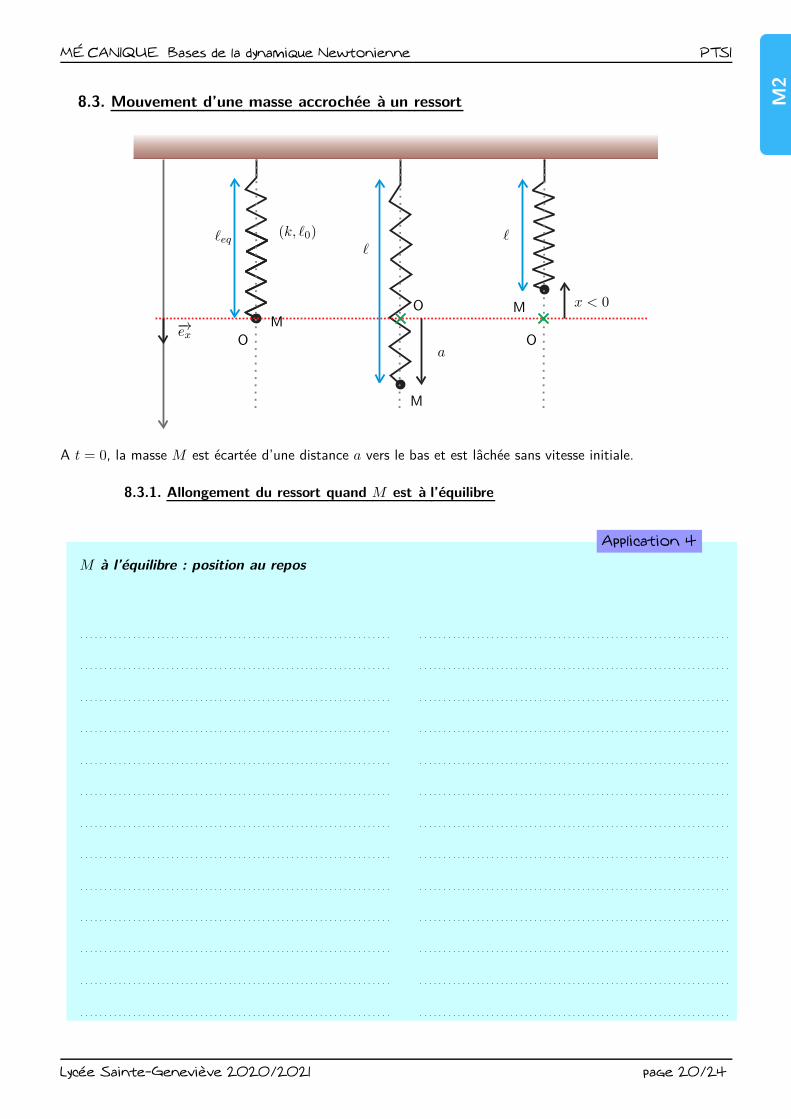
8.3. Mouvement d’une masse accrochée à un ressort
−→ex
(k, ℓ0)ℓeq ℓℓ
a
x < 0M
M
MO
O
O
A t = 0, la masse M est écartée d’une distance a vers le bas et est lâchée sans vitesse initiale.
8.3.1. Allongement du ressort quand M est à l’équilibre
M à l’équilibre : position au repos
Application 4
Lycée SainteGeneviève 2020/2021 page 20/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
8.3.2. Equation des oscillations
Étudier le mouvement de la masse M :
Application 5
Lycée SainteGeneviève 2020/2021 page 21/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
8.4. Point mobile sans frottement sur une sphère
A t = 0, on lâche sans vitesse initiale un point matériel de masse m en un point M0(θ0) sur la surface
convexe d’une sphère S de centre O, de rayon b dans le référentiel du laboratoire supposé galiléen. Pour
quelle valeur de θ, la masse M quitte-elle la sphère ?
Application 6
Lycée SainteGeneviève 2020/2021 page 22/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
Lycée SainteGeneviève 2020/2021 page 23/24
M2
MÉCANIQUE Bases de la dynamique Newtonienne PTSI
8.5. Équilibre d’un point
Soit un point M de masse m lié à un cercle vertical de centre O et de rayon b. M est attiré par une diamètre
AB du cercle suivant la force−→F = k.
−−→MA. Déterminer les positions d’équilibre du point M .
Application 7
Lycée SainteGeneviève 2020/2021 page 24/24





























