Embed Size (px)
Citation preview

Mecanica II
Tema 11
Solido de Lagrange
Manuel Ruiz Delgado
28 de marzo de 2011
Solido pesado con punto fijo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Solido de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Solido de Lagrange: reduccion a cuadraturas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Solido de Lagrange: analisis cualitatativo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Solido de Lagrange: casos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Trompo dormido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Movimiento estacionario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14Precesion de los equinoccios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1

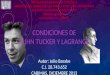
Solido pesado con punto fijo
Eje Oz1 fijo vertical ascendente:
Ejes solido principales en O: Ii = A,B,C
OG = (ξ, η, ζ)0 = (ξ1, η1, ζ1)1
En el caso general hay dos integrales primeras:
Rotula fija, lisa, peso → conservativo:
1
2
(
Ap2 +Bq2 + Cr2)
+mgζ1 = E
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
x1
y1
z1
ζ1
θ
O
G
mg
x
y
z
El peso no da momento segun Oz1, pues ~g ‖ k1:
MDO · k1 =
dHO
dt· k1 =
d
dt(HO · k1) = 0 ⇒ HO · k1 = Hz1 = Cte.
HO = (Ap,Bq,Cr)0 ; k1 = (sin θ sinϕ, sin θ cosϕ, cos θ)0
(Ap sinϕ+Bq cosϕ) sin θ + Cr cos θ = Hz1
Manuel Ruiz - Mecanica II 2 / 21
Solido pesado con punto fijo
Hace falta otra ecuacion, p.e., una de las de Euler:
MO = (ξ, η, ζ)0 ∧ (−mg k1)
Ap+ qr(C −B)Bq + pr(A−C)Cr + pq(B −A)
= −mg
η cos θ − ζ sin θ cosϕζ cos θ sinϕ− ξ cos θsin θ (ξ cosϕ− η sinϕ)
No se pueden integrar analıticamente en el caso general. Pueden reducirse a cuadraturas en dos casos:
Solido de Sofıa Kowaleskaya: A = B = 2C, ζ = 0
Solido de Lagrange: A = B, ξ = η = 0 (trompo simetrico).
Manuel Ruiz - Mecanica II 3 / 21
2

Solido de Lagrange
Solido pesado con punto fijo, elipsoide de inercia de revolucion (A = B)y centro de masas en el eje (ξ = η = 0).
En este caso, la tercera ecuacion de Euler da una integral primera:
xy
z
yz
x
11
1
0
00
O
ϕ θ
θ
ψ
ψ
ψ
θ
.
.
.
mg
Cr + pq(����B −A) = −mg sin θ (��ξ cosϕ− �η sinϕ) ⇒ r = r0
Las dos integrales primeras del caso general quedan:
A(
p2 + q2)
+ Cr20 + 2mgζ cos θ = 2E
A (p sinϕ+ q cosϕ) sin θ + Cr0 cos θ = Hz1
Ahora el problema puede reducirse a cuadraturas.
Manuel Ruiz - Mecanica II 4 / 21
Solido de Lagrange: reduccion a cuadraturas
A(
p2 + q2)
+ Cr20 + 2mgζ cos θ = 2E
A (p sinϕ+ q cosϕ) sin θ + Cr0 cos θ = Hz1
Sustituyendo p y q por sus valores en funcion de los angulos de Euler y sus derivadas,
θ2 + ψ2 sin2 θ =2E−Cr20
A − 2mgζA cos θ = α − a cos θ
ψ sin2 θ =Hz1A − C
A r0 cos θ = β − b r0 cos θ
α y β dependen de las condiciones iniciales
a y b dependen de la geometrıa de masas del solido
Eliminando ψ, queda una ecuacion en θ2 y θ → cuadratura
Las cuadraturas pueden integrarse mediante funciones elıpticas
Manuel Ruiz - Mecanica II 5 / 21
3

Solido de Lagrange: reduccion a cuadraturas
De la integral de la energıa se obtiene una cuadratura para t(θ)
(
dθ
dt
)2
= α− a cos θ −(
β − br0 cos θ
sin θ
)2
= f(θ) →∫ t
t0
dt =
∫ θ
θ0
±dθ√
f(θ)
Sustituyendo este dt en la del momento cinetico, se obtiene ψ(θ):
ψ =β − br0 cos θ
sin2 θ→ ψ − ψ0 = ±
∫ θ
θ0
β − br0 cos θ
sin2 θ
dθ√
f(θ)
Y finalmente, de r0 se obtiene ϕ(θ)
r0 = ϕ+ ψ cos θ → ϕ− ϕ0 = ±∫ θ
θ0
(
r0 −β − br0 cos θ
sin2 θcos θ
)
dθ√
f(θ)
Manuel Ruiz - Mecanica II 6 / 21
Solido de Lagrange: analisis cualitatativo
Mediante dos integrales primeras se ha dejado la de la energıa solo como funcion de θ2 y θ → sepuede hacer un analisis cualitativo:
θ2 = α− a cos θ −(
β − br0 cos θ
sin θ
)2
=2
A
[
E′ − Vef (θ)]
≥ 0
queda mas simple con el cambio u = cos θ, que da u = −θ sin θ:
θ2 sin2 θ = (α− a cos θ) sin2 θ − (β − br0 cos θ)2 ⇒
⇒ u2 = (α− au)(
1− u2)
− (β − br0u)2
Con lo que, tomando la constante E′ como cero, queda:
2
AVef (u) = − (α− au)
(
1− u2)
+ (β − br0u)2
Manuel Ruiz - Mecanica II 7 / 21
4

Solido de Lagrange: analisis cualitatativo
2AVef (u) = − (α− au)
(
1− u2)
+ (β − br0u)2 ≤ 0.
Polinomio de grado 3 con las siguientes propiedades:
u −∞ −1 u0 1 ∞Vef (u) + + − + −
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
0
Vef (u) 1
1
−1
−1 u1 u2 u3
u
θ1
θ2
Curvas: traza del eje de revolucion sobre la esfera unidad
Manuel Ruiz - Mecanica II 8 / 21
Solido de Lagrange: casos
Vef (u) = − (α− au)(
1− u2)
+ (β − br0u)2
ψ sin2 θ = β − br0u ψ = 0 → u∗ =β
br0
∣
∣
∣
∣
β
br0
∣
∣
∣
∣
> 1 |u∗| > 1 ⇒ u∗ /∈ [u1, u2]−1 0 1
Vef(u)
uu1 u2 u3
u*
∣
∣
∣
∣
β
br0
∣
∣
∣
∣
< 1
|u∗| < 1
α > au∗ u∗ ∈ [u1, u2]−1 0 1
Vef(u)
u
u1 u2 u3
u*
α < au∗ u∗ /∈ [u1, u2]−1 0 1
Vef(u)
u
u1 u2 u3
u*
α = au∗ u∗ = u2[
V ′(u∗) = a(
1− u∗2)
> 0]
−1 0 1
Vef(u)
u
u1 u2 u3
u*
Manuel Ruiz - Mecanica II 9 / 21
5

Solido de Lagrange: casos
∣
∣
∣
∣
β
br0
∣
∣
∣
∣
= 1u∗ = +1
V ′(1) = 2(α − a)
α > a θ(1) =√
α − a−1 0 1
Vef(u)
u
u1 u2 u3
α < a u = 1 imposible, pues T < 0−1 0 1
Vef(u)
uu1 u2 u3
α = ab2r2
0> 2a Trompo dormido estable
−1 0 1
Vef(u)
uu1=u2 u3
b2r20
= 2aTransicion: ω∗ =2
C
√Amgζ
−1 0 1
Vef(u)
uu1=u2=u3
b2r20
< 2a Trompo dormido inestable−1 0 1
Vef(u)
u
u1 u2=u3
Manuel Ruiz - Mecanica II 10 / 21
Solido de Lagrange: casos
∣
∣
∣
∣
β
br0
∣
∣
∣
∣
= 1 u∗ = −1 V ′(1) = −2(α+ a)α+ a > 0
−1 0 1
Vef(u)
uu1u2 u3
α+ a = 0
−1 0 1
Vef(u)
uu1=u2 u3
Manuel Ruiz - Mecanica II 11 / 21
6

Trompo dormido
Vef (u) = − (α− au)(
1− u2)
+ (β − br0u)2 β = br0
V ′ef (u) = a
(
1− u2)
+ 2u (α− au) − 2br0 (β − br0u) α = a
V ′′ef (u) = 2 (α− au) −4au+ 2b2r20 Disipacion: r0 ↓ ω∗ =
√2ab
−1 0 1
Vef(u)
uu1=u2 u3
−1 0 1
Vef(u)
uu1=u2=u3
−1 0 1
Vef(u)
u
u1 u2=u3
Manuel Ruiz - Mecanica II 12 / 21
Trompo dormido
Aplicacion del trompo dormido: estabilizacion de proyectiles por rotacion
θθ
v
Fr
v
Fr
ψ
ϕ
Manuel Ruiz - Mecanica II 13 / 21
7

Movimiento estacionario
Movimiento con θ = θ0, θ = 0, ψ = ψ0 y ϕ = ϕ0
Las condiciones inciales necesarias se pueden obtener de
• analisis cualitativo: hacer V ′ef (u) = 0
• ecuaciones de Euler: hacer θ = θ = ψ = ϕ = 0
En el movimiento estacionario se cumple para u = u0 = cos θ0
Vef (u0) = −(α− au0)(1 − u20) + (β − br0u0)2 = 0
V ′ef (u0) = a(1− u20) + 2u0(α− au0)− 2br0(β − br0u0) = 0
La primera no dice nada: se cumple siempre que se lance con θ = 0. Lo propio del estacionario esque se anule V ′.
θ0 = 0 θ0 = 0
Manuel Ruiz - Mecanica II 14 / 21
Movimiento estacionario
V ′ef (u0) = a(1− u20) + 2u0(α− au0)− 2br0(β − br0u0) = 0
Las constantes α, β, en funcion de las condiciones iniciales,
��θ20 + ψ2
0 sin2 θ0 = α− au0
ψ0 sin2 θ0 = β − br0u0
se sustituyen en la derivada del potencial,
a(
1− u20)
+ 2u0
[
ψ20
(
1− u20)
]
− 2br0
[
ψ0
(
1− u20)
]
= 0
Como solo interesan los casos con |u0| 6= 1, queda:
a+ 2u0ψ20 − 2br0ψ0 = 0
Manuel Ruiz - Mecanica II 15 / 21
8

Movimiento estacionario
a+ 2u0ψ20 − 2br0ψ0 = 0
Es mas intuitivo sustituir r0 = ϕ0 + ψ0 u0:
a+ 2u0(1− b) ψ20 − 2b ϕ0 ψ0 = 0
Esta expresion es cuadratica en la ψ0 y lineal en la ϕ0:
ψr0 =2bϕ0+
√4b2ϕ2
0−8au0(1−b)4u0(1−b) ψl0 =
2bϕ0−√
4b2ϕ20−8au0(1−b)
4u0(1−b)
Habra dos valores de la precesion, rapida y lenta, si:
(ϕ∗0)
2 ≥ 2a
b2u0(1− b) = ω∗2 u0(1− b)
donde ω∗ es la velocidad crıtica del trompo dormido.
Manuel Ruiz - Mecanica II 16 / 21
Movimiento estacionarioLa rotacion propia es unica, y tiene dos terminos:
ϕ0 =a
2b ψ0
+u0 (1− b)
bψ0 =
mgζ
Cψ0
+
(
1− C
A
)
r0
Uno, inversamente proporcional a la precesion, recoge el efecto del peso a traves de a = 2mgζ/A. El
otro, proporcional a la precesion, se debe a la inercia como en el solido de Poinsot.Para valores altos de ϕ0,
Precesion lenta: efecto del peso dominante: ψl0 ≃a
2bϕ0
Precesion rapida: inercia dominante: ψr0 ≃ bϕ0
u0(1− b)
Manuel Ruiz - Mecanica II 17 / 21
9

Movimiento estacionario
ϕ0 =mgζ
ψ0
+
(
1− C
A
)
cos θ0ψ0
ω∗√
u0(1 − b)
ϕ0
ψ0
u0 > 0
b < 1: Prolato
b > 1: Oblato
ψr0
ψl0
Manuel Ruiz - Mecanica II 18 / 21
Inclinacion del eje de la Tierra: equinoccios
� Punto aries
�
23,5o
Equinoccio:
PrimaveraSolsticio:
Verano
Equinoccio:
Otono
Solsticio:
Invierno
Manuel Ruiz - Mecanica II 19 / 21
10

Inclinacion del eje de la Tierra: estaciones
dıanoche
Verano en el
hemisferio norte
Invierno en el
hemisferio norte
23o26′
Cırculo
Polar Artico
Tropico
de Cancer
Tropico
de Capricornio
Manuel Ruiz - Mecanica II 20 / 21
Precesion de los equinoccios
Movimiento de la Tierra como solido de Lagrange: achatamiento en los polos, exceso de masa en elecuador por la fuerza centrıfuga. Momento gravitatorio analogo al del solido de Lagrange. Precesiondel eje de giro de la tierra.
ST
ω
Periodo precesion general (sol+luna): ≃ 26000 anos
Manuel Ruiz - Mecanica II 21 / 21
11





![Lecture lagrange[1]](https://img.pdfslide.tips/doc/110x75/5566c67fd8b42aac288b51d5/lecture-lagrange1.jpg)

















![Interpolación lagrange[1]](https://img.pdfslide.tips/doc/110x75/55ab8a811a28aba1568b47d4/interpolacion-lagrange1.jpg)


