Embed Size (px)
DESCRIPTION
dsadsad
Citation preview
1
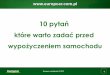
1. Równania dynamiki punktu we współrzędnych biegunowych**
2. Równania dynamiki punktu we współrzędnych naturalnych**
2
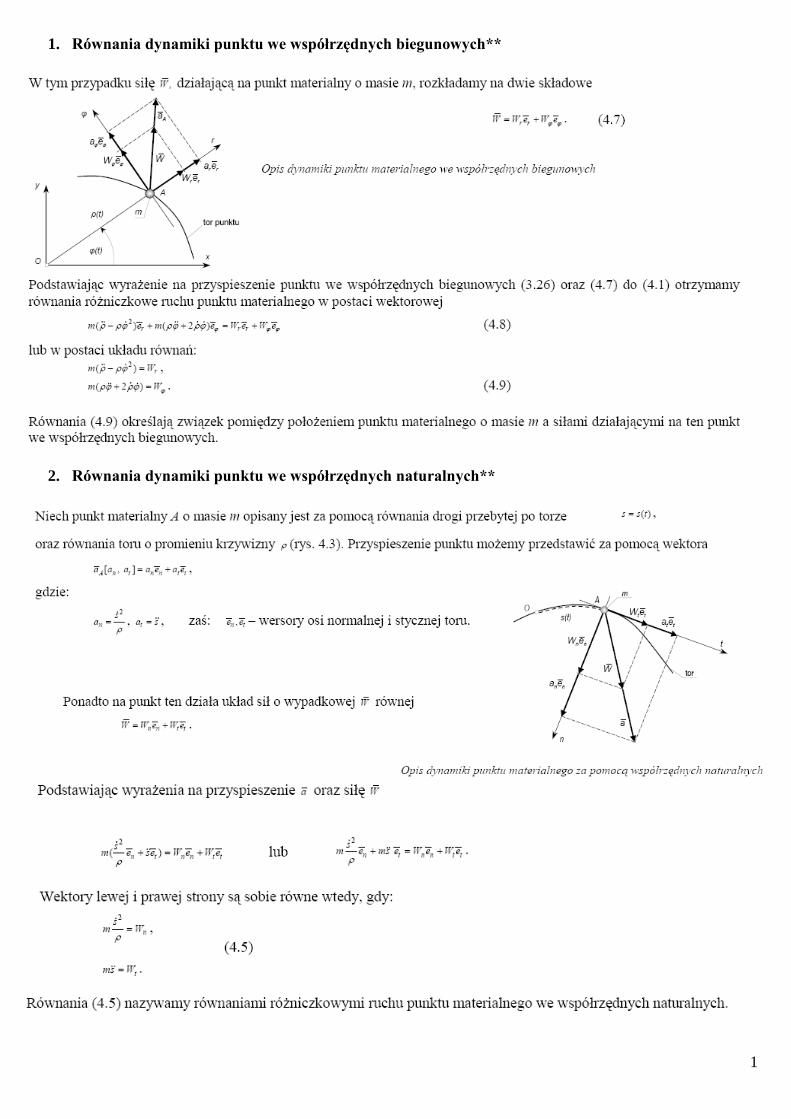
3. Równania dynamiki bryły w ruchu płaskim*** Położenie bryły w ruchu płaskim -dwa współrzędne bieguna 0(x,y):
-kąt, o jaki obróciło się ciało
Prędkość bieguna obliczamy różniczkując współrzędne bieguna względem czasu.
Natomiast prędkość kątową obliczamy różniczkując kąt obrotu ciała względem czasu.
Przyspieszenie bieguna otrzymujemy różniczkując równanie prędkości bieguna względem czasu
Natomiast przyspieszenie kątowe otrzymamy przez zróżniczkowanie równania prędkości kątowej
4. Równania ruchu bryły w ruchu postępowym
3
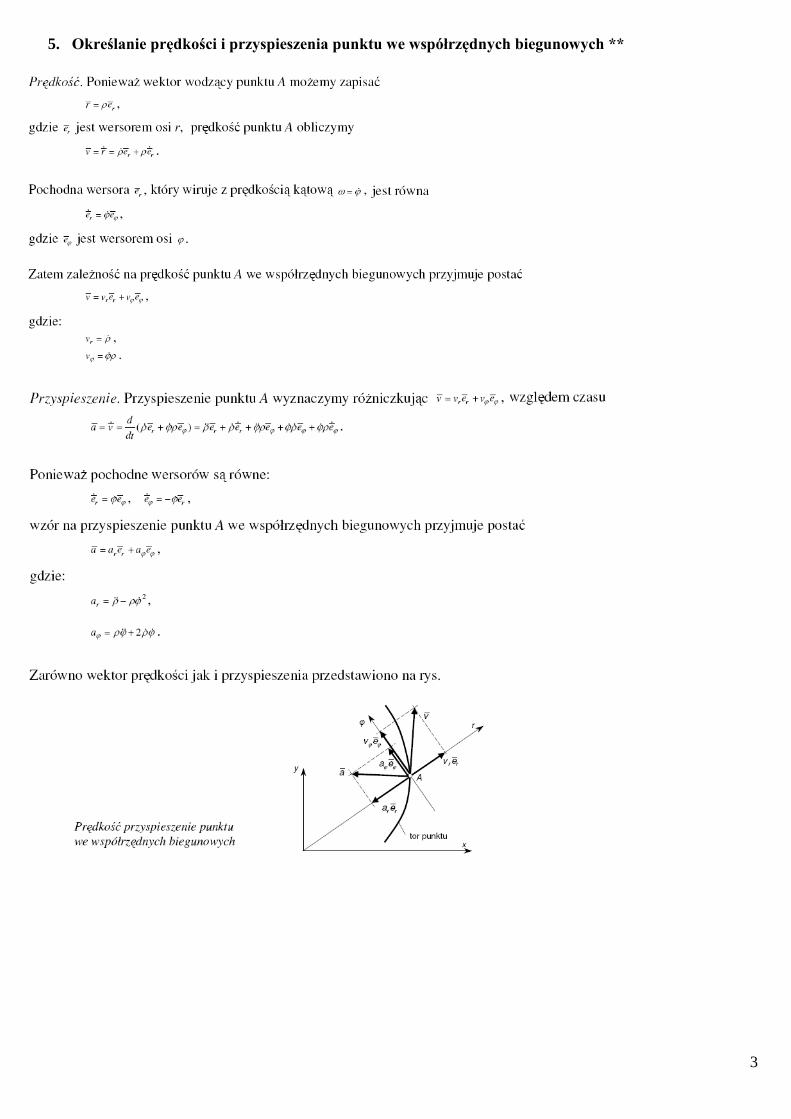
5. Określanie prędkości i przyspieszenia punktu we współrzędnych biegunowych **
4
6. Określanie prędkości i przyspieszenia punktu we współrzędnych naturalnych**
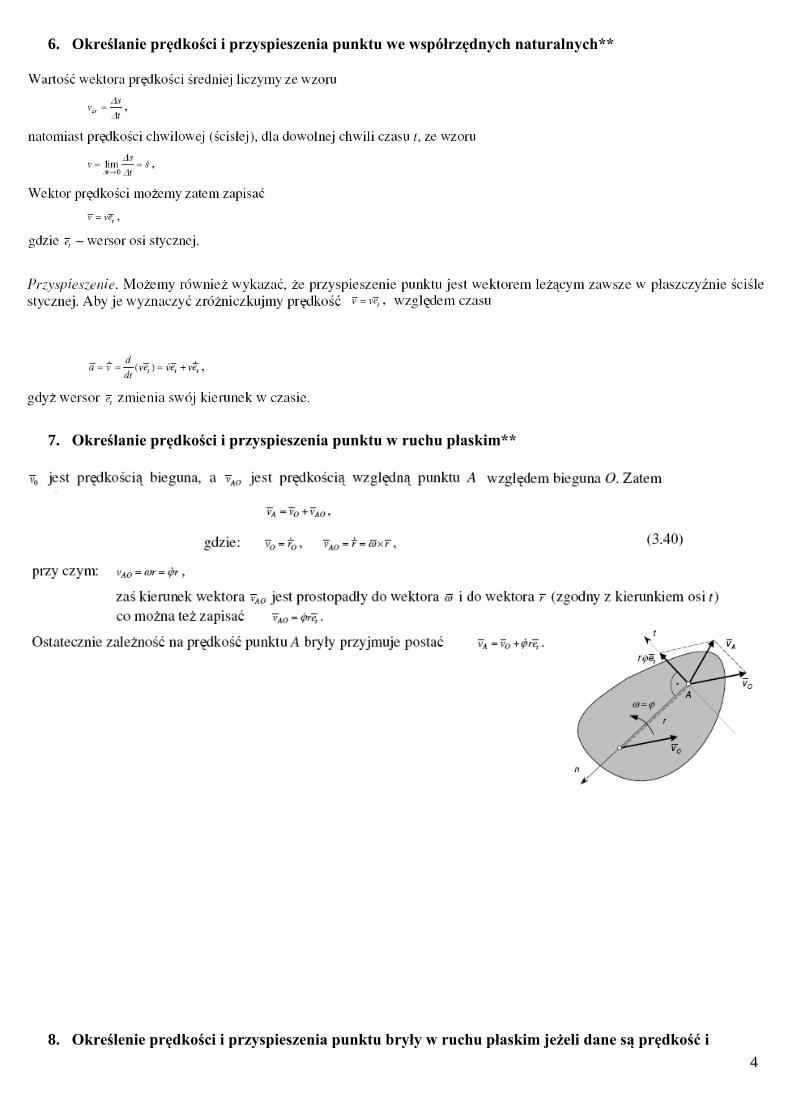
7. Określanie prędkości i przyspieszenia punktu w ruchu płaskim**
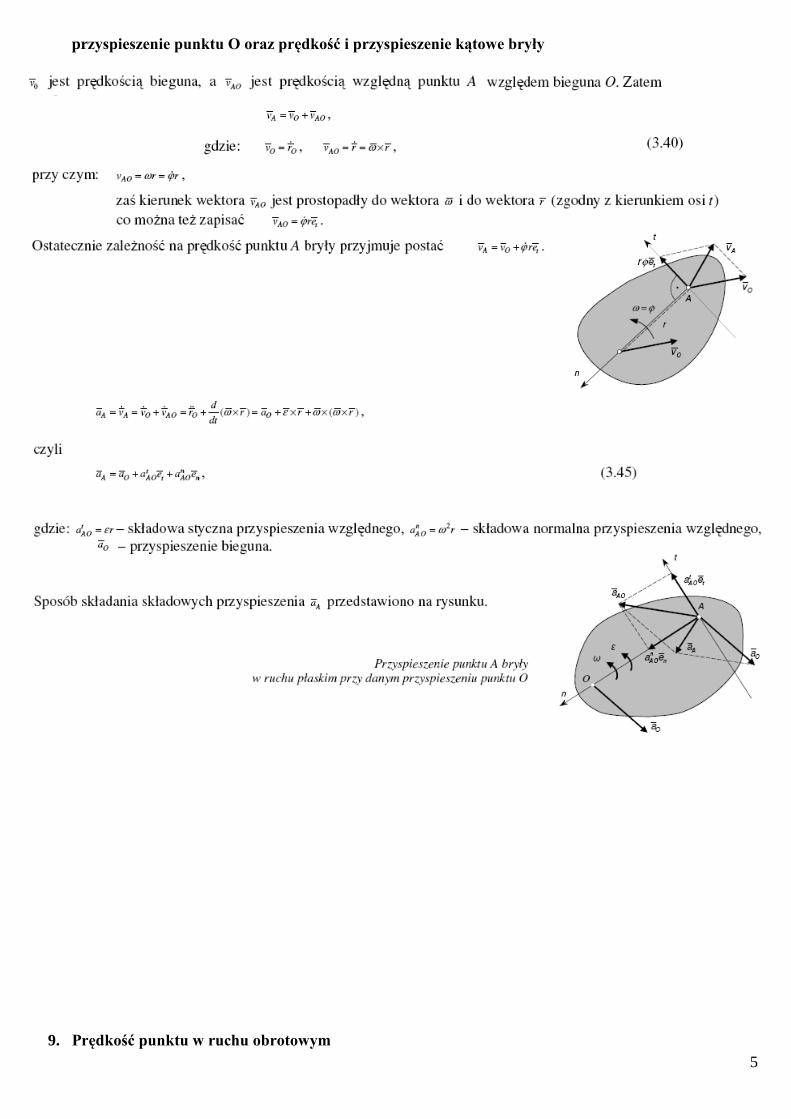
8. Określenie prędkości i przyspieszenia punktu bryły w ruchu płaskim jeżeli dane są prędkość i
5
przyspieszenie punktu O oraz prędkość i przyspieszenie kątowe bryły
9. Prędkość punktu w ruchu obrotowym

6
10. Zależność pomiędzy prędkościami dwóch punktów bryły w ruchu płaskim
7
8
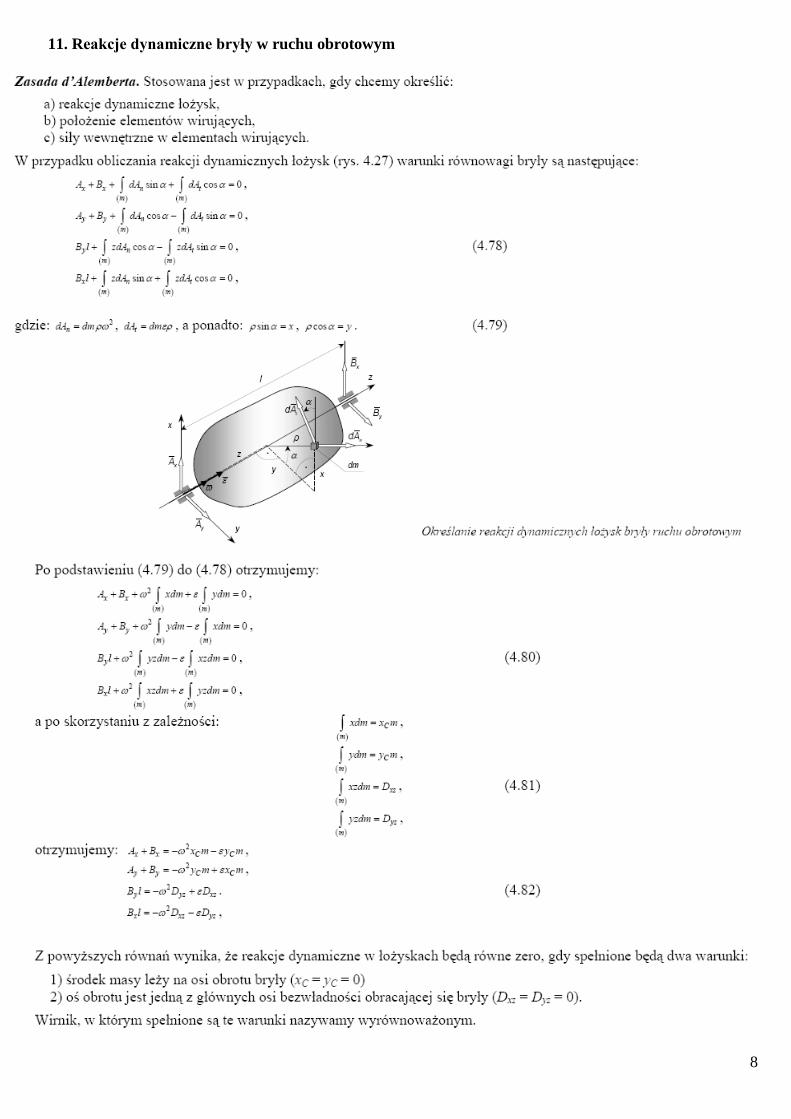
11. Reakcje dynamiczne bryły w ruchu obrotowym

9
12. Żyroskop i jego wpływ na reakcje dynamiczne łożysk
Żyroskopem nazywamy ciało materialne o postaci bryły obrotowej (wirnika) osadzone na osi pokrywającej się z osią geometryczną tego ciała zwanej osią żyroskopu. Żyroskop działa na łożyska momentem przeciwnym równym
zwanym momentem żyroskopowym.
13. Przyspieszenie styczne i normalne
14. Przyspieszenie Coriolisa Natomiast przyspieszenie Coriolisa Ac a jest dodatkowym przyspieszeniem, pojawiającym się wtedy, gdy układ ruchomy x1,y1,z1 porusza się z prędkością kątowa w (obraca się), a dodatkowo punkt A porusza się z prędkością względem Aw v względem układu ruchomego.

10
15. Definicja ruchu płaskiego bryły Ruchem płaskim nazywamy, ruch podczas którego wszystkie punkty ciała poruszają się w płaszczyznach równoległych do pewnej nieruchomej płaszczyzny, zwanej płaszczyzną kierującą.
16. Różniczkowa postać zasady energii (stosowanie)**
11
17. Twierdzenie Steinera dla masowych momentów bezwładności względem osi ** Masowy moment bezwładności względem osi równoległej do osi przechodzącej przez środek masy bryły jest równy masowemu momentowi bezwładności względem osi przechodzącej przez środek masy powiększonemu o iloczyn masy i kwadratu odległości pomiędzy osiami.
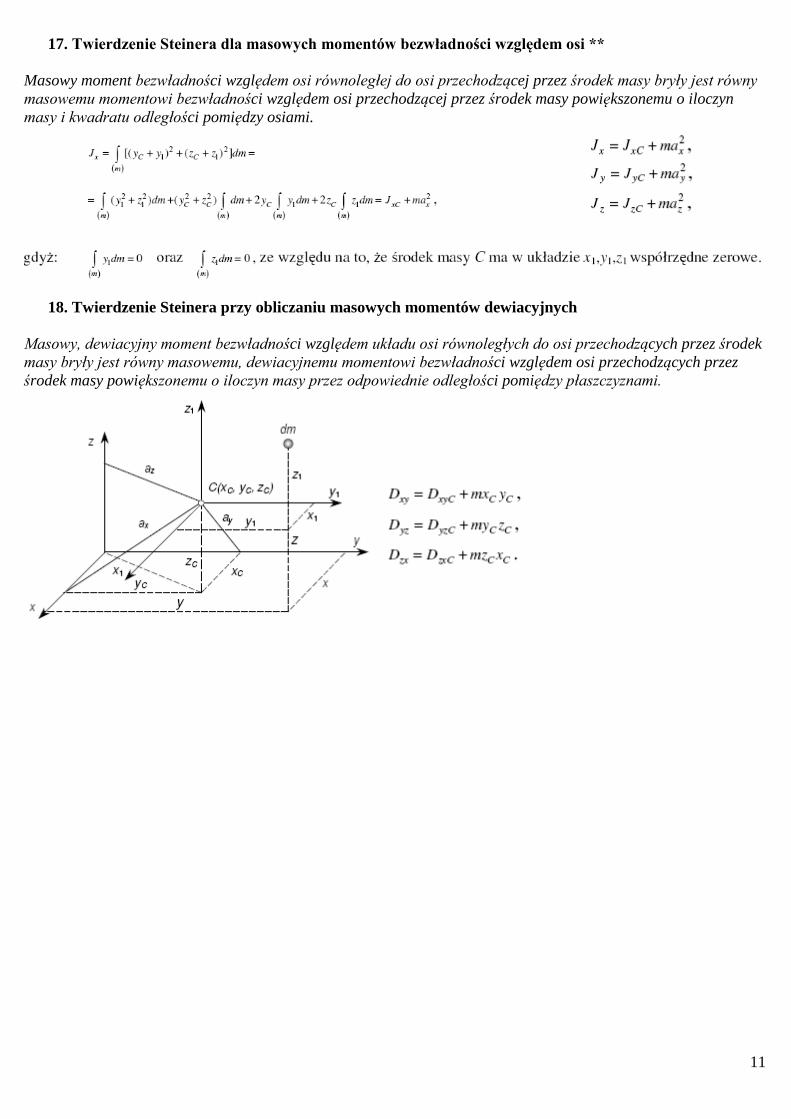
18. Twierdzenie Steinera przy obliczaniu masowych momentów dewiacyjnych Masowy, dewiacyjny moment bezwładności względem układu osi równoległych do osi przechodzących przez środek masy bryły jest równy masowemu, dewiacyjnemu momentowi bezwładności względem osi przechodzących przez środek masy powiększonemu o iloczyn masy przez odpowiednie odległości pomiędzy płaszczyznami.
12
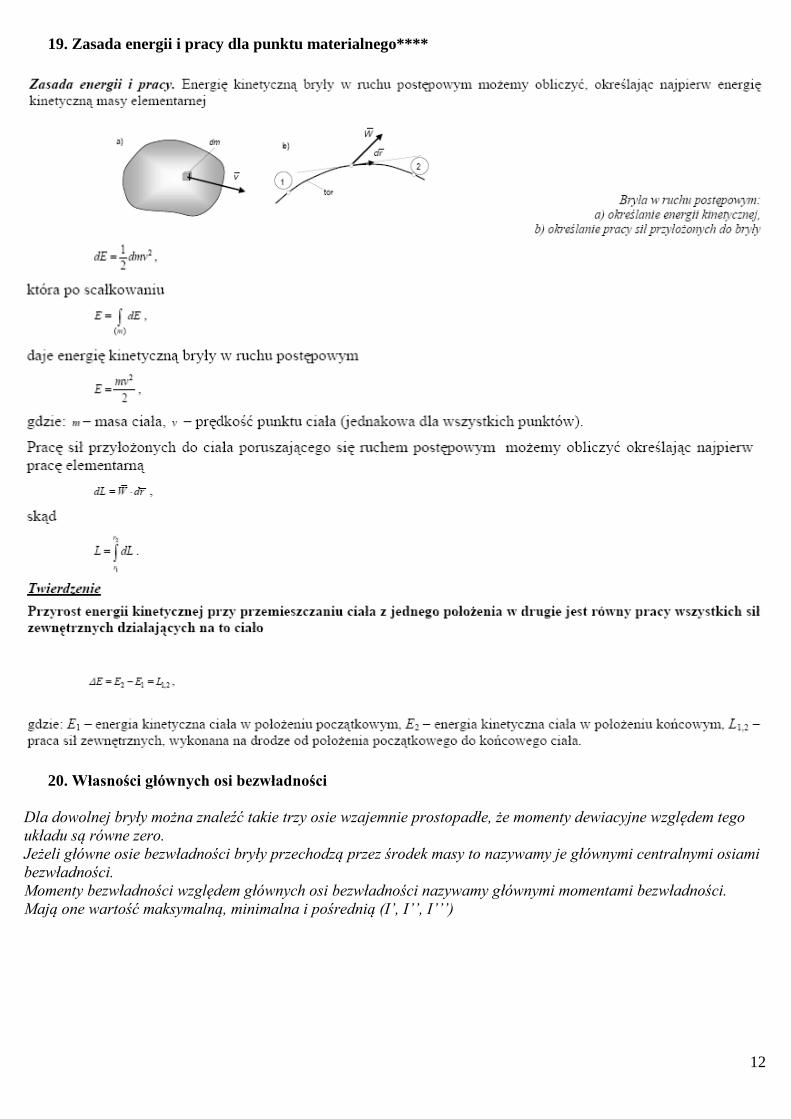
19. Zasada energii i pracy dla punktu materialnego****
20. Własności głównych osi bezwładności Dla dowolnej bryły można znaleźć takie trzy osie wzajemnie prostopadłe, że momenty dewiacyjne względem tego układu są równe zero. Jeżeli główne osie bezwładności bryły przechodzą przez środek masy to nazywamy je głównymi centralnymi osiami bezwładności. Momenty bezwładności względem głównych osi bezwładności nazywamy głównymi momentami bezwładności. Mają one wartość maksymalną, minimalna i pośrednią (I’, I’’, I’’’)
13
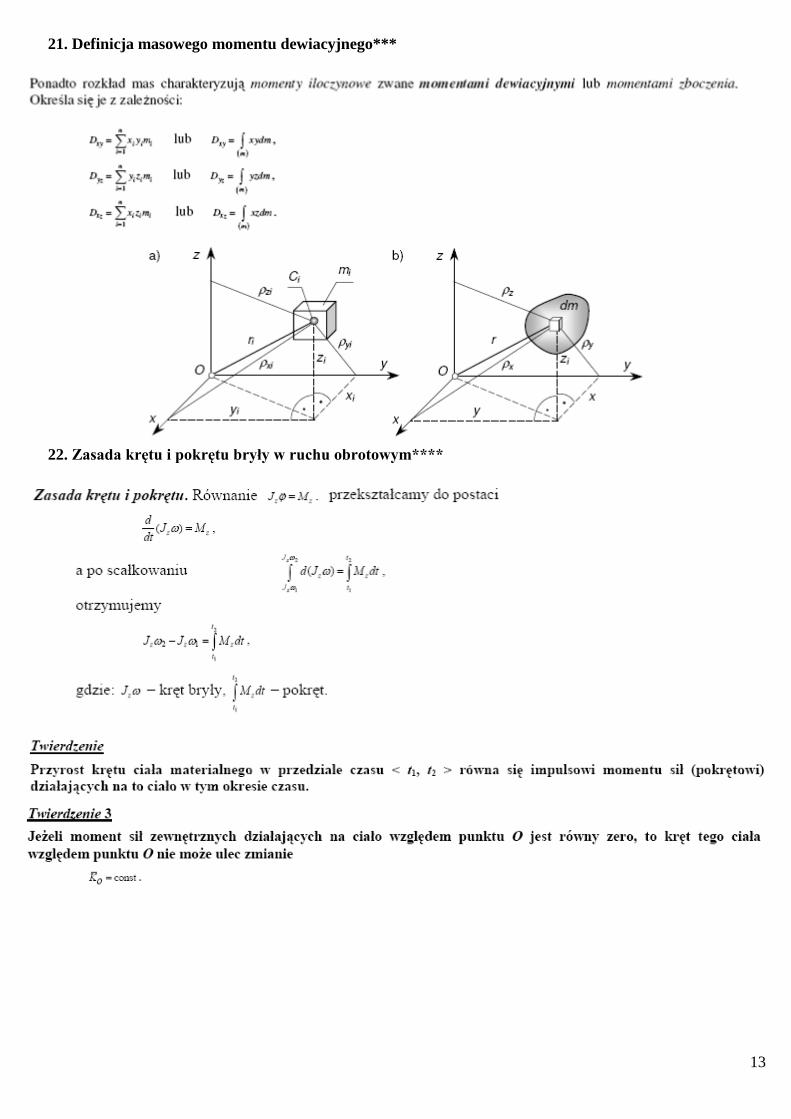
21. Definicja masowego momentu dewiacyjnego***
22. Zasada krętu i pokrętu bryły w ruchu obrotowym****

14
23. Stosowanie zasady pokrętu i popędu w dynamice punktu materialnego Przyrost krętu punktu materialnego względem punktu 0 jest równy pokrętowi sił działających na ten punkt względem punktu
001 zLL =− lub
dMm vrvmrt
∫∆
=×−×0
001
Zasada pędu i popędu
24. Kręt bryły w ruchu płaskim
Kręt ciała będącego w ruchu płaskim względem dowolnego, nieruchomego punktu O jest równy :
• - kręt ciała względem środka masy • - wektor o początku w punkcie O i końcu w środku masy ciała • - prędkość środka masy ciała • - masa ciała
25. Zasada prac przygotowanych****

15
26. Definicja przesunięcia przygotowanego** Przemieszczenie (przesunięcie) przygotowane (wirtualne) jest to każde dowolne, możliwe przemieszczenie punktu, zgodne z więzami. Jeżeli położenie punktu określone jest za pomocą wektora r , to przemieszczenie przygotowane oznaczamy symbolem δ r . Przemieszczenie przygotowane δr jest to pomyślane (wyobrażalne) przesuniecie punktu, o kierunku zgodnym z kierunkiem możliwej prędkości tego punktu.
27. Równania Lagrange’a II rodzaju dla układów o dwóch stopniach swobody****
Dla układu o dwóch stopniach swobody s = 2
28. Równania Lagrange’a II rodzaju dla układów o trzech stopniach swobody****
Dla układu o trzech stopniach swobody s = 3

16
29. Ogólne równanie dynamiki układu punktów z więzami idealnymi**
30. Współczynniki restytucji
Wartości współczynnika restytucji dla zderzeń plastycznych k=0, zaś dla zderzeń idealnie sprężystych k=1. Dla innych przypadków należą one do przedziału 0<k<1. Współczynnik restytucji wyznacza się doświadczalnie. Zależy on od materiałów z jakich są wykonane zderzające się ciała. Wartość współczynnika można wyznaczyć porównując wysokości kulki przed i po odbiciu.
31. Zależność pomiędzy masowym momentem bezwładności osiowym (x,y,z) a płaszczyznowym(x-y, y-z, z-x)**
Masowy moment bezwładności względem osi równy jest sumie masowych momentów bezwładności względem dwóch wzajemnie prostopadłych płaszczyzn tworzących tę oś.
Dowód:
32. Zależność pomiędzy biegunowymi, a osiowymi momentami bezwładności
17
33. Definicja masowego momentu względem osi
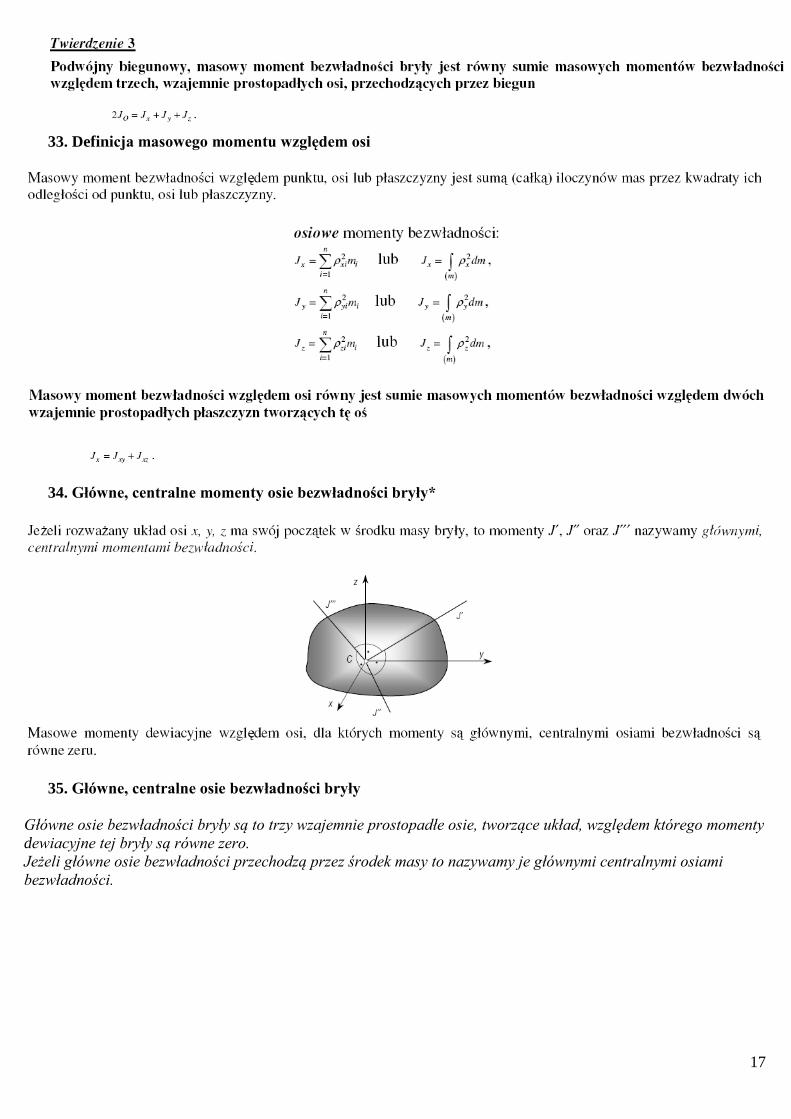
34. Główne, centralne momenty osie bezwładności bryły*
35. Główne, centralne osie bezwładności bryły Główne osie bezwładności bryły są to trzy wzajemnie prostopadłe osie, tworzące układ, względem którego momenty dewiacyjne tej bryły są równe zero. Jeżeli główne osie bezwładności przechodzą przez środek masy to nazywamy je głównymi centralnymi osiami bezwładności.
18
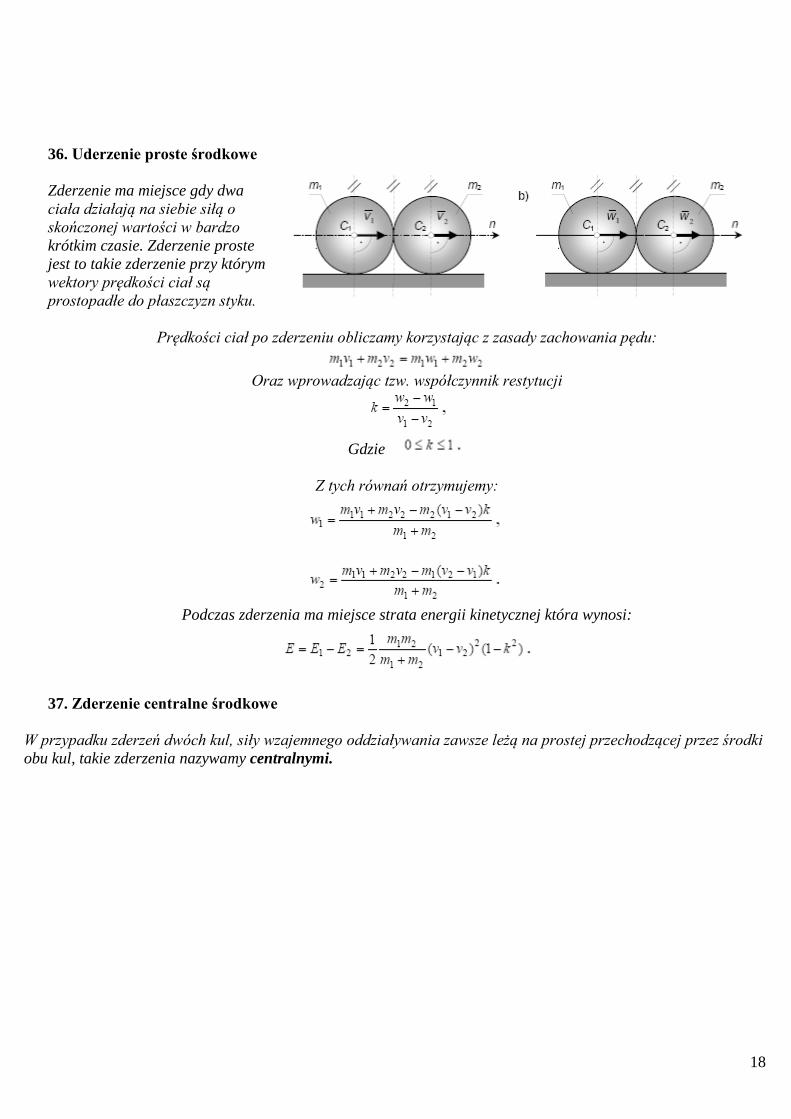
36. Uderzenie proste środkowe
Zderzenie ma miejsce gdy dwa ciała działają na siebie siłą o skończonej wartości w bardzo krótkim czasie. Zderzenie proste jest to takie zderzenie przy którym wektory prędkości ciał są prostopadłe do płaszczyzn styku.
Prędkości ciał po zderzeniu obliczamy korzystając z zasady zachowania pędu:
Oraz wprowadzając tzw. współczynnik restytucji
Gdzie
Z tych równań otrzymujemy:
Podczas zderzenia ma miejsce strata energii kinetycznej która wynosi:
37. Zderzenie centralne środkowe W przypadku zderzeń dwóch kul, siły wzajemnego oddziaływania zawsze leżą na prostej przechodzącej przez środki obu kul, takie zderzenia nazywamy centralnymi.
19
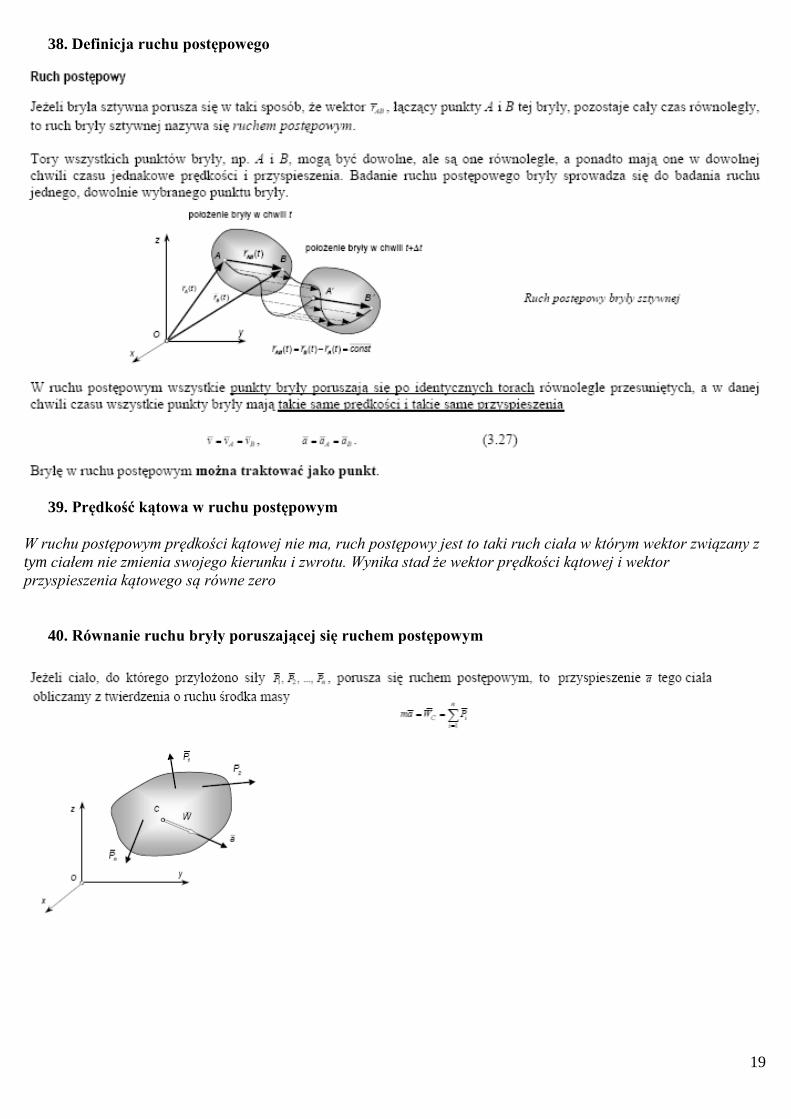
38. Definicja ruchu postępowego
39. Prędkość kątowa w ruchu postępowym
W ruchu postępowym prędkości kątowej nie ma, ruch postępowy jest to taki ruch ciała w którym wektor związany z tym ciałem nie zmienia swojego kierunku i zwrotu. Wynika stad że wektor prędkości kątowej i wektor przyspieszenia kątowego są równe zero
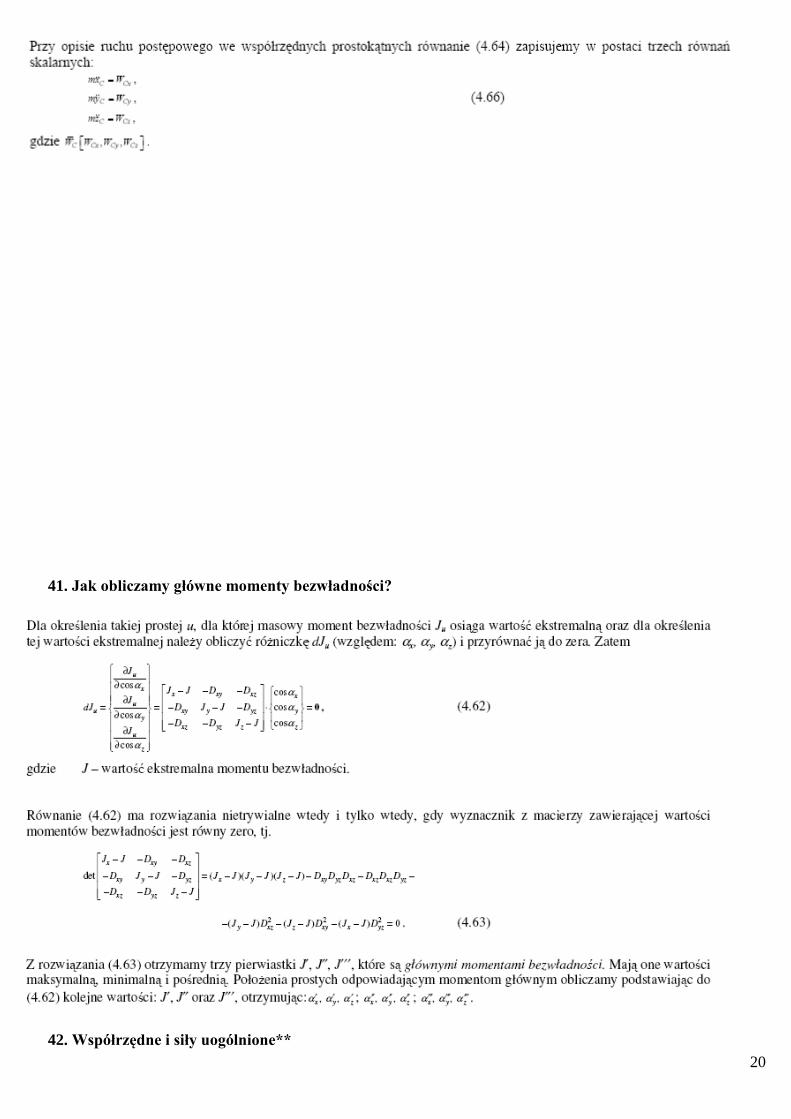
40. Równanie ruchu bryły poruszającej się ruchem postępowym
20
41. Jak obliczamy główne momenty bezwładności?
42. Współrzędne i siły uogólnione**
21
Współrzędne uogólnione są to współrzędne niezależne od siebie, opisujące jednoznacznie położenie układu w przestrzeni (jest to minimalna liczba współrzędnych potrzebnych do opisu położenia układu). Siły uogólnione Q j są to wielkości spełniające równanie:
Siłę uogólnioną możemy wyznaczyć z następującej zależności:
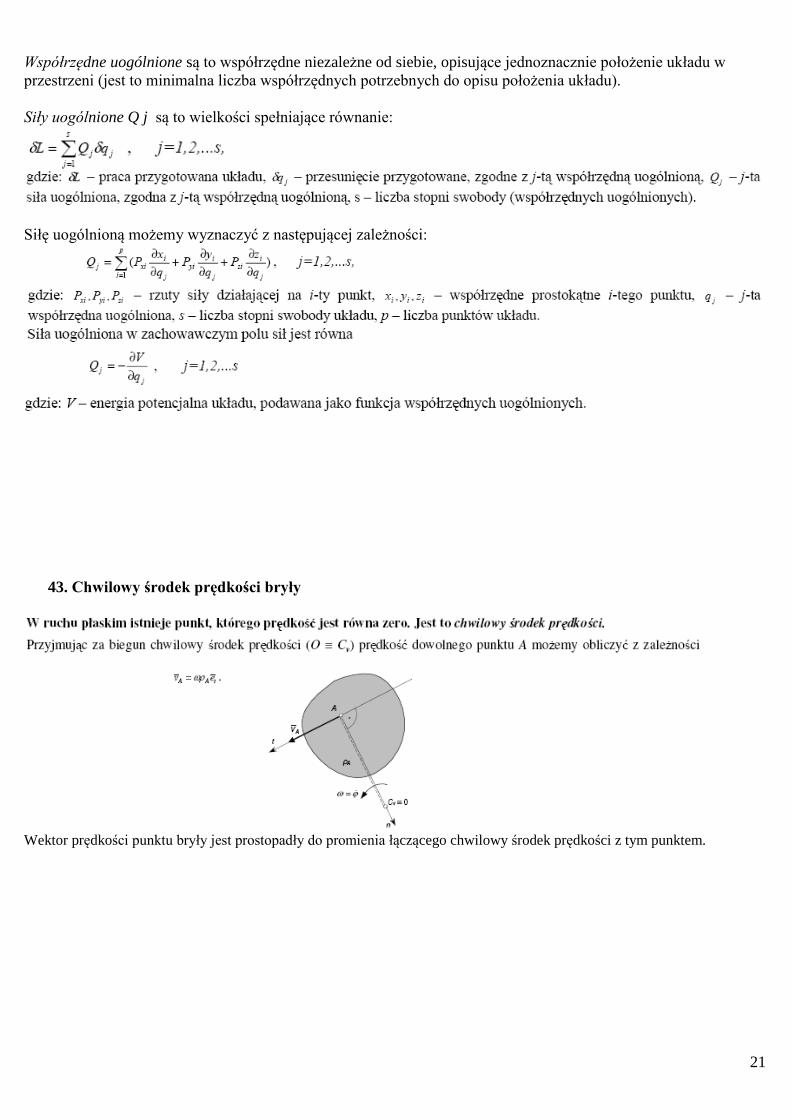
43. Chwilowy środek prędkości bryły
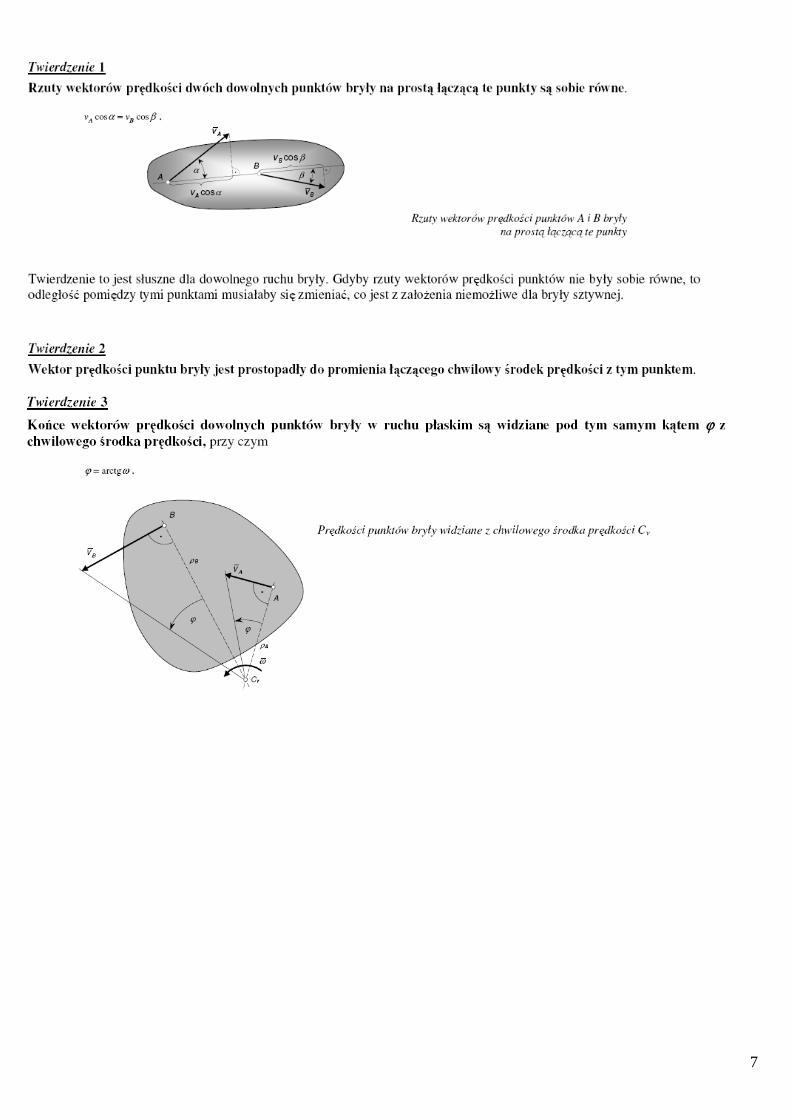
Wektor prędkości punktu bryły jest prostopadły do promienia łączącego chwilowy środek prędkości z tym punktem.
22
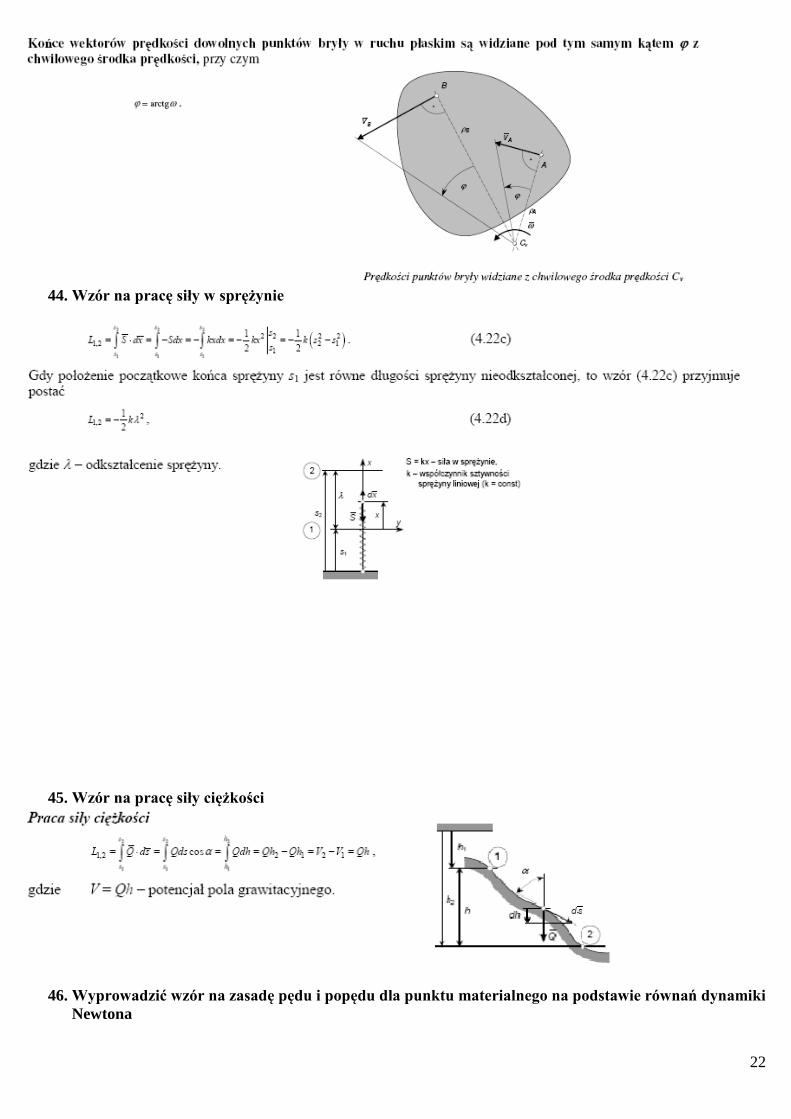
44. Wzór na pracę siły w sprężynie
45. Wzór na pracę siły ciężkości
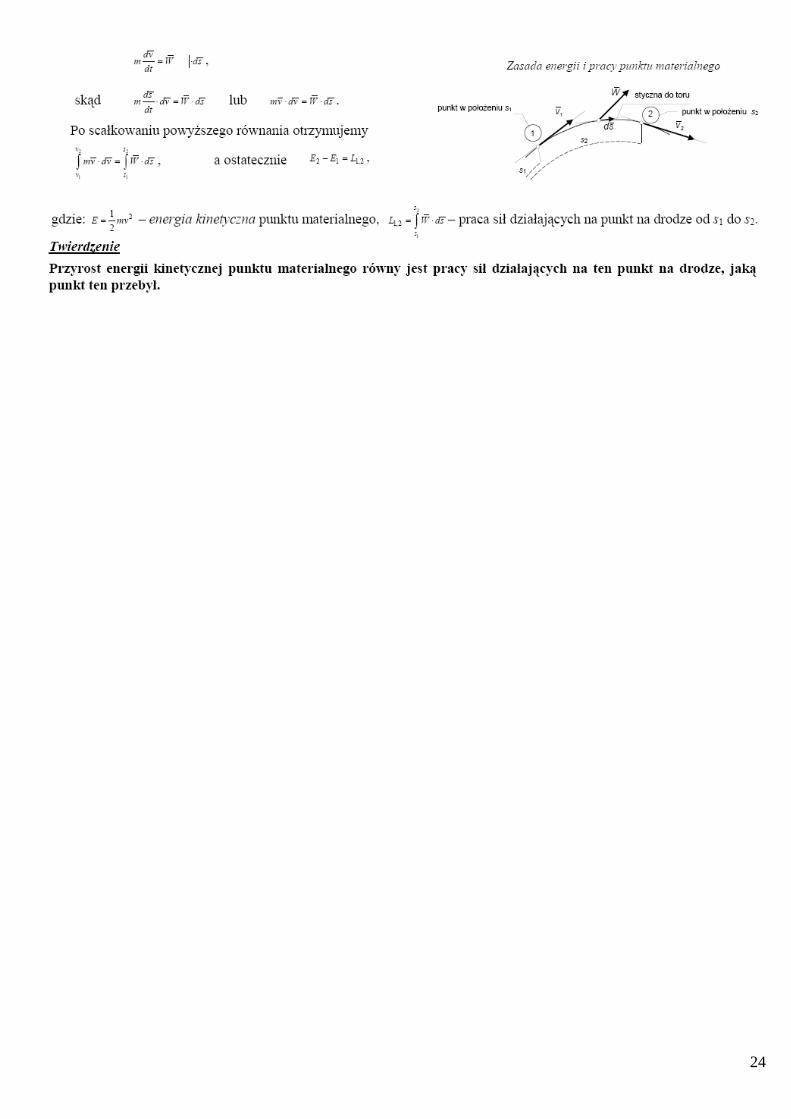
46. Wyprowadzić wzór na zasadę pędu i popędu dla punktu materialnego na podstawie równań dynamiki Newtona

23
47. Wyprowadzić wzór na zasadę energii i pracy dla punktu materialnego na podstawie II zasady dynamiki Newtona
24