Embed Size (px)
Citation preview
1/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Mecánica del VueloTema 7: Estabilidad Estática y Control: Movimiento
Longitudinal
Damián Rivas Rivas y Sergio Esteban Roncero
Departamento de Ingeniería AeroespacialEscuela Técnica Superior de Ingeniería, Universidad de Sevilla
Curso 2013-2014
Rivas & Esteban MVI

2/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Outline
1 Introducción
2 Sustentación Total
3 Momento de Cabeceo
4 Vuelo Equilibrado
5 Control Longitudinal Estático con Mandos Fijos
6 Estabilidad Longitudinal Estática con Mandos Fijos
Rivas & Esteban MVI

3/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Outline
1 Introducción
2 Sustentación Total
3 Momento de Cabeceo
4 Vuelo Equilibrado
5 Control Longitudinal Estático con Mandos Fijos
6 Estabilidad Longitudinal Estática con Mandos Fijos
Rivas & Esteban MVI
4/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Introducción - I
Estabilidad: El concepto de estabilidad se define simplemente como lacualidad en la que un avión tiende a regresar a la condición de equilibriode forma autónoma.
Se distingue entre:
Estabilidad estática.Estabilidad dinámica.
Estabilidad estática: Tendencia del avión a generar momentosrecuperadores, cuando se produce una perturbación, que hagan que elavión vuelva a la situación de equilibrio de partida.
Estabilidad Estática y Control se divide en:Movimiento longitudinal.Movimiento lateral-direccional.
Si las fuerzas de recuperación son demasiado fuertes el aviónpuede pasarse de sus valores iniciales y entrar en un modooscilatorio incontrolable
Estabilidad dinámica está presente si el movimiento dinámico del aviónregresa eventualmente a su estado original
Rivas & Esteban MVI
5/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Introducción - II
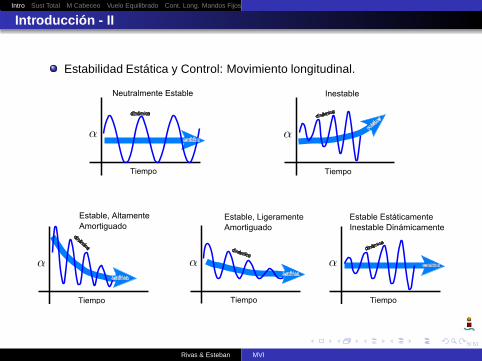
Estabilidad Estática y Control: Movimiento longitudinal.
Tiempo
Estable, Altamente
AmortiguadoEstable, Ligeramente
Amortiguado
Estable Estáticamente
Inestable Dinámicamente
InestableNeutralmente Estable
Tiempo Tiempo
TiempoTiempo
estática
dinámica
estática
dinámica
estática
dinámica
dinámica
estática
estátic
adinámica
Rivas & Esteban MVI

6/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Introducción - III
Estabilidad Estática y Control: Movimiento longitudinal.
MEstabilizador
Horizontal
Fuerza
Aerodinámica
Momento
Resultante
Rivas & Esteban MVI
7/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
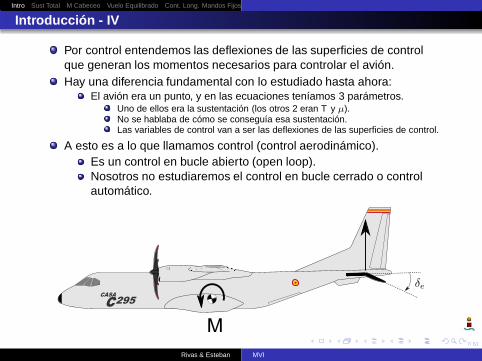
Introducción - IV
Por control entendemos las deflexiones de las superficies de controlque generan los momentos necesarios para controlar el avión.Hay una diferencia fundamental con lo estudiado hasta ahora:
El avión era un punto, y en las ecuaciones teníamos 3 parámetros.Uno de ellos era la sustentación (los otros 2 eran T y µ).No se hablaba de cómo se conseguía esa sustentación.Las variables de control van a ser las deflexiones de las superficies de control.
A esto es a lo que llamamos control (control aerodinámico).Es un control en bucle abierto (open loop).Nosotros no estudiaremos el control en bucle cerrado o controlautomático.
M
Rivas & Esteban MVI

8/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Introducción - V
Es interesante poner en comparación la estabilidad estática con lamaniobrabilidad , por que van en direcciones opuestas:
Estabilidad Estática ⇔ Baja Maniobrabilidad.Los aviones militares , que tienen una alta maniobrabilidad, muchos deellos son inestables:
El vuelo es posible gracias a los sistemas de control automático.
Hipótesis Generales:1 Movimiento longitudinal y movimiento lateral-direccional están
desacoplados:Corresponde a una configuración clásica, pero habría otrasconfiguraciones que no verifican lo anterior.
2 Las fuerzas y momentos totales del avión que se tienen son la suma de lasfuerzas de las superficies aerodinámicas, más las interferencias
3 Fuerzas y momentos aerodinámicos varian linealmente con las variablesaerodinámicas (α, β) y de control (δe, δa, δr ):
f (a + x, b + y) ≈ f (a, b) +∂f
∂x(a, b) x +
∂f
∂y(a, b) y + · · ·
∂f∂x (a, b) & ∂f
∂y (a, b) ⇒ derivadas de estabilidad.Nos va a permitir escribir CL, CM , etc, en función de las variables decontrol y aerodinámicas
4 No se tiene en cuenta el empuje.
Rivas & Esteban MVI

9/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
Outline
1 Introducción
2 Sustentación TotalSustentación Total - IntroducciónEfectividad del Timón de Profundidad - τSustentación Total del AviónLínea de Sustentación Nula Total
3 Momento de Cabeceo
4 Vuelo Equilibrado
5 Control Longitudinal Estático con Mandos Fijos
6 Estabilidad Longitudinal Estática con Mandos Fijos
Rivas & Esteban MVI

10/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
Sustentación Total del Avión - I
Se considera el conjunto ala-fuselaje.
Se considera la cola:
En la cola se añade la interferencia ala-fuselaje.Deflexión de estela:
Deflexión de la estela ǫ: La corriente no incide en la misma dirección.Variación de la velocidad de la corriente incidente.
Rivas & Esteban MVI
11/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
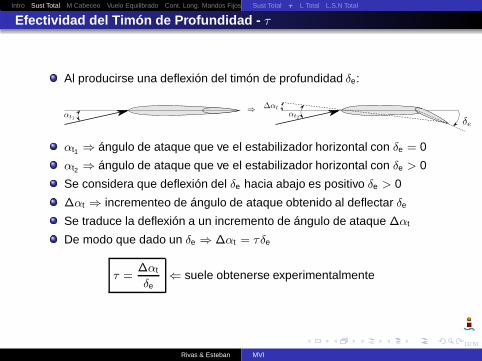
Efectividad del Timón de Profundidad - τ
Al producirse una deflexión del timón de profundidad δe:
αt1 ⇒ ángulo de ataque que ve el estabilizador horizontal con δe = 0
αt2 ⇒ ángulo de ataque que ve el estabilizador horizontal con δe > 0
Se considera que deflexión del δe hacia abajo es positivo δe > 0
∆αt ⇒ incrementeo de ángulo de ataque obtenido al deflectar δe
Se traduce la deflexión a un incremento de ángulo de ataque ∆αt
De modo que dado un δe ⇒ ∆αt = τδe
τ =∆αt
δe⇐ suele obtenerse experimentalmente
Rivas & Esteban MVI
12/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
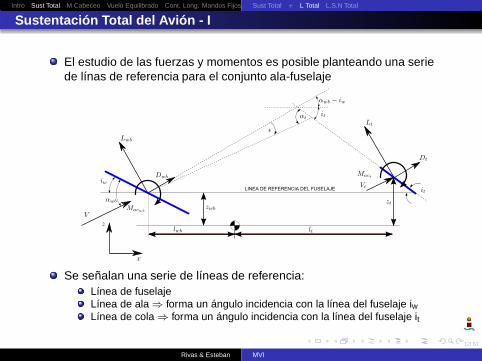
Sustentación Total del Avión - I
El estudio de las fuerzas y momentos es posible planteando una seriede línas de referencia para el conjunto ala-fuselaje
LINEA DE REFERENCIA DEL FUSELAJE
Se señalan una serie de líneas de referencia:Línea de fuselajeLínea de ala ⇒ forma un ángulo incidencia con la línea del fuselaje iwLínea de cola ⇒ forma un ángulo incidencia con la línea del fuselaje it
Rivas & Esteban MVI

13/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
Sustentación Total del Avión - II
Se tiene entonces que:Para δe = 0:
αt + ε = αwb − iw + it ⇒ αt = αwb − iw + it − ε
LINEA DE REFERENCIA DEL FUSELAJE
Rivas & Esteban MVI

14/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
Sustentación Total del Avión - II
Se tiene entonces que:Para δe 6= 0:
αt = αwb − iw + it − ε+ τδe
LINEA DE REFERENCIA DEL FUSELAJE
Rivas & Esteban MVI

15/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
Sustentación Total del Avión - II
Se tiene entonces que:Para δe = 0:
αt + ε = αwb − iw + it ⇒ αt = αwb − iw + it − ε
Para δe 6= 0:
αt = αwb − iw + it − ε+ τδe
Se hace un modelo lineal de la deflexión de la estela:
ε = ε0 + ∂ε∂α
αwb
⇓
αt =
(
1 −∂ε
∂α
)
αwb − iw + it − ε0 + τδe
Rivas & Esteban MVI

16/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
Sustentación Total del Avión - III
L = Lwb + Lt cos ε− Dt sin ǫ ⇐ adimensionalizar por 12ρV 2S
⇒ CL = L12 ρV 2S
=Lwb
12 ρV 2S
+ Lt12 ρV 2
t St
V 2t
V 2StS cos ε− D
12 ρV 2
t St
V 2t
V 2StS sin ε
⇒ CL = CLwb+ CLt
V 2t
V 2StS cos ε− CDt
V 2t
V 2StS sin ε
definiendo ⇒ ηt =V 2
tV 2 ⇒ CL = CLwb
+ CLtηt
StS cos ε− CDt
ηtStS sin ε
Aproximación:
ε ≪ 1,CDt≪ CLt
⇒ CDtε ≪≪ CLt
⇒ CL ≈ CLwb+ CLt
ηtSt
S
Suponemos: CLwb= awbαwb
awb ⇒ Pendiente de la curva de sustentación del alaAquí subyace el problema aerodinámico ⇒ ala, fuselaje y la interferenciaentre ambos
Suponemos: CLt= atαt
at ⇒ Pendiente de la curva de sustentación del estabilizador horizontalEn esta pendiente estaría la interferencia entre la cola y el fuselaje
Rivas & Esteban MVI
17/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
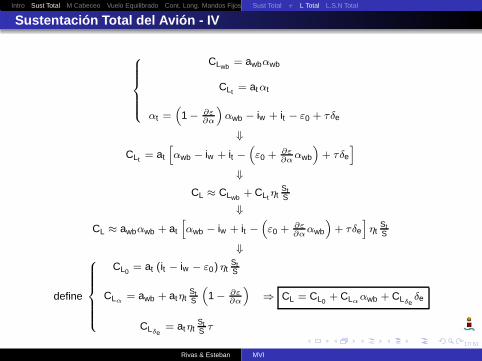
Sustentación Total del Avión - IV
CLwb= awbαwb
CLt= atαt
αt =(
1 − ∂ε∂α
)
αwb − iw + it − ε0 + τδe
⇓
CLt= at
[
αwb − iw + it −(
ε0 + ∂ε∂α
αwb
)
+ τδe
]
⇓
CL ≈ CLwb+ CLt
ηtStS
⇓
CL ≈ awbαwb + at
[
αwb − iw + it −(
ε0 + ∂ε∂α
αwb
)
+ τδe
]
ηtStS
⇓
define
CL0= at (it − iw − ε0) ηt
StS
CLα = awb + atηtStS
(
1 − ∂ε∂α
)
CLδe= atηt
StS τ
⇒ CL = CL0+ CLααwb + CLδe
δe
Rivas & Esteban MVI

18/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
Sustentación Total del Avión - V
Analizando la ecuación de la sustentación CL:
CL = CL0+ CLααwb + CLδe
δe ⇒
CLα > 0
CLδe> 0
CLα > 0 ⇒: A mayor ángulo de ataque,mayor sustentación ∂ε∂α
< 1CLδe
> 0 ⇒: Dado que τ > 0 con la definición del criterio de signos de δe
En términos y coeficientes awb, at ,∂ε∂α
, dependen del número deReynolds (Re) y del número de Mach (M).
Esto será válido hasta que se entra en pérdida.
Rivas & Esteban MVI

19/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
Sustentación Total del Avión - VI
Curva de sustentación CL con it como parámetro (en vez de δe).En algunos aviones, no hay timón de profundidad, sinó que sevaría la it de todo el estabilizador
Rivas & Esteban MVI

20/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
Sustentación Total del Avión - VI
F-15 ⇒ variación de la it de todo el estabilizador
Rivas & Esteban MVI

21/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
Sustentación Total del Avión - VII
Curva de sustentación CL con δe .
Rivas & Esteban MVI

22/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosSust Total τ L Total L.S.N Total
Línea de Sustentación Nula Total
La línea de sustentación nula total del avión se obtiene:
CL = 0 ⇒ CL0+ CLα αwb |CL=0 + CLδe
δe = 0
Restando las dos expresiones:
CL = CL0+ CLααwb + CLδe
δe
0 = CL0+ CLα αwb |CL=0 + CLδe
δe
}
⇒ CL = CLα
(
αwb − αwb |CL=0
)
Definiendo:
α = αwb − αwb|CL=0
Lo que implica que se miden los ángulos desde esta línea, entoncespodemos definir:
CL = CLα
(
αwb − αwb |CL=0
)
⇒ CL = CLαα
Rivas & Esteban MVI

23/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosIntro Aprox
Outline
1 Introducción
2 Sustentación Total
3 Momento de CabeceoIntroducciónAproximaciones
4 Vuelo Equilibrado
5 Control Longitudinal Estático con Mandos Fijos
6 Estabilidad Longitudinal Estática con Mandos Fijos
Rivas & Esteban MVI
24/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosIntro Aprox
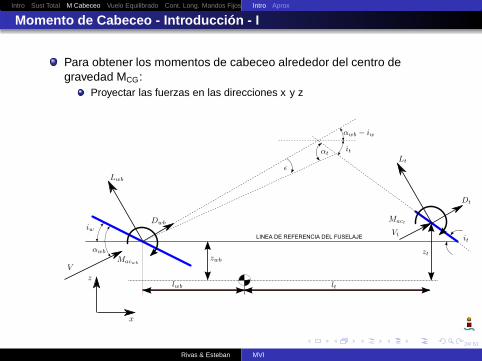
Momento de Cabeceo - Introducción - I
Para obtener los momentos de cabeceo alrededor del centro degravedad MCG:
Proyectar las fuerzas en las direcciones x y z
LINEA DE REFERENCIA DEL FUSELAJE
Rivas & Esteban MVI

25/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosIntro Aprox
Momento de Cabeceo - Introducción - II
LINEA DE REFERENCIA DEL FUSELAJE
Zwb = Lwb cos (αwb − iw ) + Dwb sin (αwb − iw )
Xwb = −Lwb sin (αwb − iw ) + Dwb cos (αwb − iw)
Zt = Lt cos (αt − it ) + Dt sin (αt − it)
Xt = −Lt sin (αt − it) + Dt cos (αt − it)
⇓
MCG = Macwb + Zwb lwb + Xwbzwb + Mact − Zt lt + Xt zt
Rivas & Esteban MVI

26/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosIntro Aprox
Momento de Cabeceo - Introducción - II
Zwb = Lwb cos (αwb − iw ) + Dwb sin (αwb − iw )
Xwb = −Lwb sin (αwb − iw ) + Dwb cos (αwb − iw)
Zt = Lt cos (αt − it ) + Dt sin (αt − it)
Xt = −Lt sin (αt − it) + Dt cos (αt − it)
⇓
MCG = Macwb + Zwb lwb + Xwbzwb + Mact − Zt lt + Xt zt
Adimensionalizar por 12ρV 2Sc
CMCG=
MCG12ρV 2Sc
=Macwb
12ρV 2Sc
+Zwb
12ρV 2S
lwb
c+
Xwb12ρV 2S
zwb
c
+Mact
12ρV 2
t St ct
V 2t St
V 2S
ct
c−
Zt12ρV 2
t St
ltc
V 2t St
V 2S+
Xt12ρV 2
t St
zt
c
V 2t St
V 2S
Resultando en la expresión general:
CMCG= CMac,wb
+ Czwb l̄wb + Cxwb z̄wb + CMac,tηt
St ct
Sc− Czt l̄tηt
St
S+ Cxt z̄tηt
St
S
Rivas & Esteban MVI
27/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosIntro Aprox
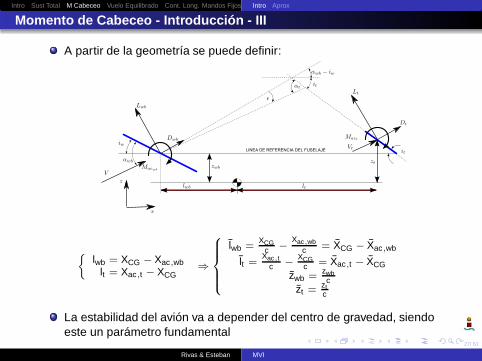
Momento de Cabeceo - Introducción - III
A partir de la geometría se puede definir:
LINEA DE REFERENCIA DEL FUSELAJE
{
lwb = XCG − Xac,wblt = Xac,t − XCG
⇒
l̄wb =XCG
c −Xac,wb
c = X̄CG − X̄ac,wb
l̄t =Xac,t
c −XCG
c = X̄ac,t − X̄CG
z̄wb =zwbc
z̄t =ztc
La estabilidad del avión va a depender del centro de gravedad, siendoeste un parámetro fundamental
Rivas & Esteban MVI

28/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosIntro Aprox
Aproximaciones - I
aproximación de ángulos pequeños y Lwb ≫ Dwb
Zwb = Lwb cos (αwb − iw ) + Dwb sin (αwb − iw ) ⇒ Zwb ≈ Lwb
Xwb = −Lwb sin (αwb − iw ) + Dwb cos (αwb − iw) ⇒ Xwb ≈ −Lwb (αwb − iw ) + Dwb
Zt = Lt cos (αt − it) + Dt sin (αt − it) ⇒ Zt ≈ Lt
Xt = −Lt sin (αt − it) + Dt cos (αt − it) ⇒ Xt ≈ −Lt (αt − it ) + Dt
adimensionalizar ⇓ 12ρV 2S
Czwb =Zwb
12 ρV 2S
⇒ Czwb ≈ CLwb, Cxwb =
Xwb12 ρV 2S
⇒ Cxwb ≈ −CLwb(αwb − iw) + CDwb
Czt =Zt
12 ρV 2
t St⇒ Czt ≈ CLt
, Cxt =Xt
12 ρV 2
t St⇒ Cxt ≈ −CLt
(αt − it) + CDt
Resultando en la expresión general:
CMCG= CMac,wb
+ CLwbl̄wb +
[
−CLwb(αwb − iw) + CDwb
]
z̄wb
+ CMac,tηt
St ct
Sc− CLt
l̄tηtSt
S+
[
−CLt(αt − it) + CDt
]
z̄tηtSt
S
Rivas & Esteban MVI

29/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosIntro Aprox
Aproximaciones - II
Aproximaciones adicionales:
X ≪ Zzwb ∼ lwb
zt ≪ lt⇒
{
Cxwb z̄wb ≪ Czwb l̄wbCxt z̄t ≪ Czt l̄t
CMac,t≪ CMac,wb
⇓
CMCG= CMac,wb
+ CLwbl̄wb − CLt
l̄tηtSt
S
recordando
CLwb= awbαwb
CLt= at
[(
1 − ∂ε∂α
)
αwb − iw + it − ε0 + τδe
]
⇓
CMCG= CM0
+ CMααwb + CMδe
δe ⇐ modelo linealizado
⇑
con
CM0= CMac,wb
− at (it − iw − ε0) ηtStS
(
X̄ac,t − X̄CG)
CMα= awb
(
X̄CG − X̄ac,wb)
− at
(
1 − ∂ε∂α
)
ηtStS
(
X̄ac,t − X̄CG)
CMδe= −atτηt
StS
(
X̄ac,t − X̄CG)
Rivas & Esteban MVI

30/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosIntro Aprox
Aproximaciones - III
La contribución a la sustentación al dar un ∆δe es un efecto pequeño,aunque no así será el efecto del momento.
CMα ⇒ Índice de estabilidad estática longitudinalCMδe
⇒ Potencia de controlCMδe
< 0 ⇒ por el criterio de δe > 0 haci a abajo.
Para generar estabilidad estática en cabeceo es necesario que paracualquier cambio en el ángulo de ataque se generen momentos queopongan el cambio.
Esto implica que un diseño estable viene dado por un CMα < 0
Para una ráfaga que produzca ∆αwb > 0
recordando ⇒ CMCG= CM0
+ CMααwb + CMδe
δe
⇓
∆αwb > 0 ⇒ ∆MCG ∼ CMααwb
y como el momento ha de ser recuperador ⇒ CMα< 0
Una vez diseñado el avión, los parámetros ηt , StS etc... son fijos.
La posición del centro de gravedad XCG va a ser un parámetrofundamental
Rivas & Esteban MVI

31/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosIntro Aprox
Momento de Cabeceo - I
Curva de momento de cabeceo CM con it como parámetro (en vez deδe).
Rivas & Esteban MVI

32/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosIntro Aprox
Momento de Cabeceo - II
Curva de momento de cabeceo CM con δe .
Rivas & Esteban MVI

33/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosIntro Aprox
Momento de Cabeceo - III
CM y CL en función de αwb para distintos valores de δe
Rivas & Esteban MVI

34/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Outline
1 Introducción
2 Sustentación Total
3 Momento de Cabeceo
4 Vuelo Equilibrado
5 Control Longitudinal Estático con Mandos Fijos
6 Estabilidad Longitudinal Estática con Mandos Fijos
Rivas & Esteban MVI

35/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Vuelo Equilibrado - I
El vuelo equilibrado viene definido por la condición en la que hayequilibrio de fuerzas y momentos:
ΣFx = 0ΣFz = 0ΣM = 0
⇒
L = WT = D
MCG = 0
MCG = 0 ⇒ CMCG = 0 ⇒ define la relación entre αwb y la deflexióndel timón de profundidad δe
0 = CMac,wb+ CLwb
(
X̄CG − X̄ac,wb)
− CLtηt
StS
(
X̄ac,t − X̄CG)
⇓
CLt=
CMac,wb+CLwb
(X̄CG−X̄ac,wb)
ηtStS (X̄ac,t−X̄CG)
De todo conocemos los signos excepto de CMac,wb , que lo suponemosnegativo CMac,wb < 0 ⇒ ala con curvatura positiva
El término CMac,wb no va a ser el dominante.
Rivas & Esteban MVI

36/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Vuelo Equilibrado - II
En Configuración habitual:
Se puede ver que:{
X̄CG − X̄ac,wb > 0X̄ac,t − X̄CG > 0
⇒ CLt=
CMac,wb+CLwb (X̄CG−X̄ac,wb)
ηtStS (X̄ac,t−X̄CG)
⇒ CLt> 0
Lo importante es ver que el estabilizador horizontal juega un papelfundamental en el equilibrado del avión
El término dominante es CLwb
(
X̄CG − X̄ac,wb)
y es positivo por que elcentro aerodinámico del ala está por delante del CG.Esto tiene una ventaja adicional ya que como CLt > 0 la cola contribuyea la sustentación positivamente
Lwb + Lt = W ⇒ Lwb = W − Lt < W
Hay que volar a menor ángulo de ataque, lo cual beneficia a laresistencia
Rivas & Esteban MVI
37/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
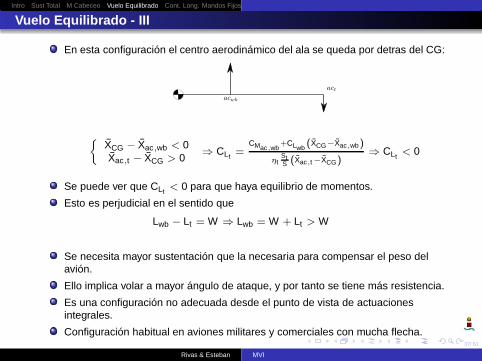
Vuelo Equilibrado - III
En esta configuración el centro aerodinámico del ala se queda por detras del CG:
{
X̄CG − X̄ac,wb < 0X̄ac,t − X̄CG > 0
⇒ CLt=
CMac,wb+CLwb (X̄CG−X̄ac,wb)
ηtStS (X̄ac,t−X̄CG)
⇒ CLt< 0
Se puede ver que CLt< 0 para que haya equilibrio de momentos.
Esto es perjudicial en el sentido que
Lwb − Lt = W ⇒ Lwb = W + Lt > W
Se necesita mayor sustentación que la necesaria para compensar el peso delavión.
Ello implica volar a mayor ángulo de ataque, y por tanto se tiene más resistencia.
Es una configuración no adecuada desde el punto de vista de actuacionesintegrales.
Configuración habitual en aviones militares y comerciales con mucha flecha.
Rivas & Esteban MVI

38/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
Vuelo Equilibrado - IV
Para paliar esto, aparecen las configuraciones de estabilizador Cannard
CMCG= CMac,wb
− CLwb
(
X̄ac,wb − X̄CG)
+ CLcηcScS
(
X̄CG − X̄ac,c)
⇒ CMCG= 0
Se tiene ηc = 1 ya que la corriente no llega perturbada al Cannard:{
X̄CG − X̄ac,wb < 0X̄ac,c − X̄CG < 0
⇒ CLc =−CMac,wb
+CLwb(X̄ac,wb−X̄CG)
ηcScS (X̄CG−X̄ac,c)
⇒ CLc > 0
Se puede ver que CLc > 0 para que haya equilibrio de momentos.Esto permite que:
Lwb + Lc = W ⇒ Lwb = W − Lt < W
Hay que volar a menor ángulo de ataque, lo cual beneficia a laresistencia.
Rivas & Esteban MVI
39/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos Fijos
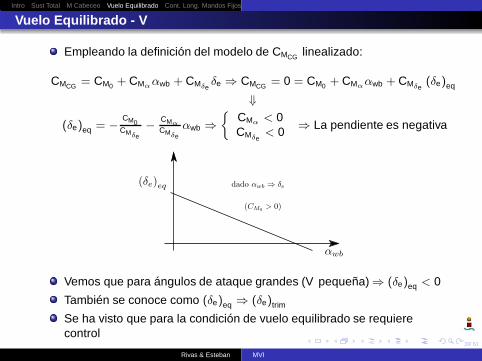
Vuelo Equilibrado - V
Empleando la definición del modelo de CMCG linealizado:
CMCG = CM0 + CMααwb + CMδeδe ⇒ CMCG = 0 = CM0 + CMααwb + CMδe
(δe)eq
⇓
(δe)eq = −CM0
CMδe
−CMα
CMδe
αwb ⇒
{
CMα < 0CMδe
< 0⇒ La pendiente es negativa
Vemos que para ángulos de ataque grandes (V pequeña) ⇒ (δe)eq < 0
También se conoce como (δe)eq ⇒ (δe)trim
Se ha visto que para la condición de vuelo equilibrado se requierecontrol
Rivas & Esteban MVI

40/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosCont. Long. Mandos Fijos
Outline
1 Introducción
2 Sustentación Total
3 Momento de Cabeceo
4 Vuelo Equilibrado
5 Control Longitudinal Estático con Mandos FijosControl Longitudinal Estático con Mandos Fijos
6 Estabilidad Longitudinal Estática con Mandos Fijos
Rivas & Esteban MVI

41/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosCont. Long. Mandos Fijos
Control Longitudinal Estático con Mandos Fijos - I
Vuelo equilibrado es un ejercicio de control en el que para un αwb ⇒ δe
Se supondrá un vuelo horizontal rectilíneo, uniforme y equilibrado.
Veremos, en esta configuración el control londigital ⇒ Posibilidad decambiar la velocidad de vuelo.Este está relacionado con cambiar CL, y por lo tanto cambiar αwb
W = L = 12ρV 2SCL ⇒ Dada V ⇒ CL = 2W
ρV 2S
Recordando: ⇒
{
CL = CL0+ CLααwb + CLδe
δe
CMCG= CM0
+ CMααwb + CMδe
δe ⇐ CMCG= 0
⇓
CL = 2WρV 2S
= CL0+ CLααwb + CLδe
δe
CM0+ CMα
αwb + CMδeδe = 0
⇒
{
(αwb)eq(δe)eq
Estas 2 ecuaciones permiten, para una V dada ⇒ determinar el CL, ⇒determinar el αwb y el δe que hay que poner para equilibrar el avión.Se puede simplificar el problema y desacoplar si se asumeCLδe
δe ≪ CLαα
V ⇒ CL ⇒ CL = CL0+ CLααwb ⇒ (αwb)eq
0 = CM0+ CMα
αwb + CMδeδe ⇒ (δe)eq
Rivas & Esteban MVI
42/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosCont. Long. Mandos Fijos
Control Longitudinal Estático con Mandos Fijos - II
CL = CL0+ CLααwb ⇒ (αwb)eq
0 = CM0+ CMα
αwb + CMδeδe ⇒ (δe)eq
El control, que es volver a equilibrar el avión cuando cambiamos αwb, sepuede hacer de diferentes formas:
Variar δe
Variar CMα ⇒ lo más usado es variar el centro de gravedad XCG
Variar CM0 ⇒ Variando la curvatura del ala: (Flaps y Slats)
Los 2 últimos criterios de control no son los más adecuados ya quevariar CMα y sacar flaps/slats alteran la estabilidad del avión
Variar CMα es directamente variar la estabilidad del avión.
En los mecanismos para variar CM0 no se ve cómo afecta a laestabilidad estática del avión.
Los mecanismos de desplegado de flaps/slats ⇒ varía la deflexión de laestela variando por lo tanto CMα
Rivas & Esteban MVI

43/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosCont. Long. Mandos Fijos
Control Longitudinal Estático con Mandos Fijos - III
para cada V ⇒
{
CL = CL0+ CLααwb ⇒ (αwb)eq
0 = CM0+ CMα
αwb + CMδeδe
⇒
{
(αwb)eq(δe)eq
Con esto aparece un parámetro importante que define la controlabilidad delavión:⇒ dδe
dV
Se tienen curvas δe frente a V (VEAS ) ⇒ En todos los casos dδedV > 0.
Rivas & Esteban MVI

44/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosCont. Long. Mandos Fijos
Control Longitudinal Estático con Mandos Fijos - IV
Cúando es más controlable el avión, cuando la derivada es elevada , o cuando laderivada es pequeña?
rango
amplio
rango pequeño
Suponiendo zonas con derivada elevada, y con derivada pequeña:
A V ↑ el rango de δe es más pequeño: se requiere un control más finoA V ↓, se tiene un rango de δe más amplio
El rango de error que permite tener la Vdeseada es mayor cuanto mayor es laderivada.
Interesa, desde el punto de vista de controlabilidad, derivadas elevadas⇒ máscontrolabilidad
Rivas & Esteban MVI
45/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosCont. Long. Mandos Fijos
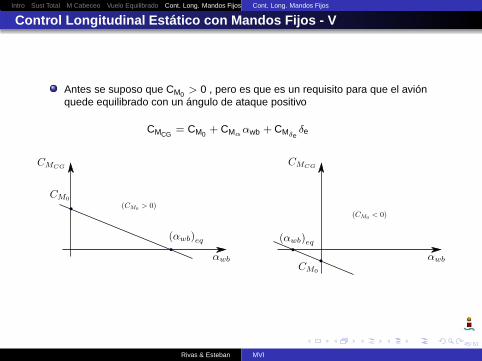
Control Longitudinal Estático con Mandos Fijos - V
Antes se suposo que CM0> 0 , pero es que es un requisito para que el avión
quede equilibrado con un ángulo de ataque positivo
CMCG= CM0
+ CMααwb + CMδe
δe
Rivas & Esteban MVI

46/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosCont. Long. Mandos Fijos
Control Longitudinal Estático con Mandos Fijos - VI
CMCG= CM0
+ CMααwb + CMδe
δe
Rivas & Esteban MVI

47/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
Outline
1 Introducción
2 Sustentación Total
3 Momento de Cabeceo
4 Vuelo Equilibrado
5 Control Longitudinal Estático con Mandos Fijos
6 Estabilidad Longitudinal Estática con Mandos FijosEstabilidad Longitudinal Estática con Mandos FijosPunto Neutro con Mandos FijosPosición más Adelantada Posible del Centro de Gravedad
Rivas & Esteban MVI
48/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
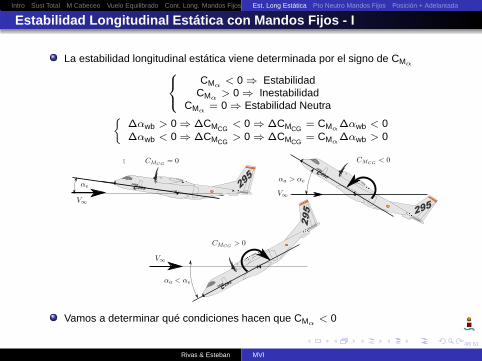
Estabilidad Longitudinal Estática con Mandos Fijos - I
La estabilidad longitudinal estática viene determinada por el signo de CMα
CMα< 0 ⇒ Estabilidad
CMα> 0 ⇒ Inestabilidad
CMα= 0 ⇒ Estabilidad Neutra
{
∆αwb > 0 ⇒ ∆CMCG< 0 ⇒ ∆CMCG
= CMα∆αwb < 0
∆αwb < 0 ⇒ ∆CMCG> 0 ⇒ ∆CMCG
= CMα∆αwb > 0
Vamos a determinar qué condiciones hacen que CMα< 0
Rivas & Esteban MVI

49/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
Estabilidad Longitudinal Estática con Mandos Fijos - II
-
+P
itch
in-m
om
en
t co
effic
ien
t a
bo
ut c
en
ter
of g
ravity
No moments
Destabilizing
moments
Stable
Stable
Neutral
No moments
Unstable
Destabilizing
moments
Trim
(equilibrium)
condition
A B CD
Neutral Point
Center of Gravity @ A
Center of Gravity @ B
Center of Gravity @ C
Center of Gravity @ D
Rivas & Esteban MVI

50/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
Punto Neutro con Mandos Fijos - I
El punto neutro es aquella posición del XCG en que CMα = 0.
CMα= awb
(
X̄CG − X̄ac,wb)
− at
(
1 − ∂ε∂α
)
ηtStS
(
X̄ac,t − X̄CG)
Avión convencional: ⇒ La contribucíon del ala es una contribuciónpositiva desestabilizante, mientras que la cola da una contribuciónnegativa que hace un efecto estabilizante
Dado un tipo de avión de ala y cola convencional, el parámetro claveque determina el CMα es la posición del centro de gravedad X̄CG
Rivas & Esteban MVI

51/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
Punto Neutro con Mandos Fijos - II
La posición del punto neutro NP la llamamos N0 y por definición es laposición del centro de gravedad que hace CMα = 0
N0 = X̄∣
∣
CMα=0
⇓
CMα= 0 ⇒ awb
(
N0 − X̄ac,wb)
− at
(
1 − ∂ε∂α
)
ηtStS
(
X̄ac,t − N0)
⇓
N0
[
awb + at
(
1 − ∂ε∂α
)
ηtStS
]
= awbX̄ac,wb + at
(
1 − ∂ε∂α
)
ηtStS X̄ac,t
⇓
N0 =awbX̄ac,wb + at
(
1 − ∂ε∂α
)
ηtStS X̄ac,t
awb + at
(
1 − ∂ε∂α
)
ηtStS
Veremos que CMα es función de N0
Rivas & Esteban MVI

52/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
Punto Neutro con Mandos Fijos - III
CMα= awb
(
X̄CG − X̄ac,wb)
− at
(
1 − ∂ε∂α
)
ηtStS
(
X̄ac,t − X̄CG)
⇓
CMα= X̄CG
[
awb + at
(
1 − ∂ε∂α
)
ηtStS
]
−[
awbX̄ac,wb + at
(
1 − ∂ε∂α
)
ηtStS X̄ac,t
]
⇓
CMα=
[
awb + at
(
1 −∂ε
∂α
)
ηtSt
S
]
(
X̄CG − N0)
⇑
CLα = awb + at
(
1 − ∂ε∂α
)
ηtStS
⇓
CMα= CLα
(
X̄CG − N0)
⇔ CMα= −CLα
(
N0 − X̄CG)
Si se quiere que CMα < 0 (condición de estabilidad) es necesario⇒ N0 − X̄CG > 0
Rivas & Esteban MVI

53/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
Punto Neutro con Mandos Fijos - IV
El centro de gravedad tiene que estar por delante del punto neutro
El punto neutro NP representa la posición más retrasada posible paratener estabilidad estática longitudinal
N0 − X̄CG ≡ Márgen estático con mandos fijos
Tomando momentos respecto del punto neutro.
Rivas & Esteban MVI
54/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
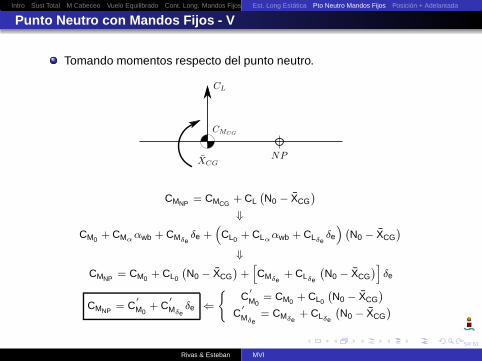
Punto Neutro con Mandos Fijos - V
Tomando momentos respecto del punto neutro.
CMNP= CMCG
+ CL(
N0 − X̄CG)
⇓
CM0+ CMα
αwb + CMδeδe +
(
CL0+ CLααwb + CLδe
δe
)
(
N0 − X̄CG)
⇓
CMNP= CM0
+ CL0
(
N0 − X̄CG)
+[
CMδe+ CLδe
(
N0 − X̄CG)
]
δe
CMNP= C
′
M0+ C
′
Mδeδe ⇐
{
C′
M0= CM0
+ CL0
(
N0 − X̄CG)
C′
Mδe= CMδe
+ CLδe
(
N0 − X̄CG)
Rivas & Esteban MVI

55/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
Punto Neutro con Mandos Fijos - VI
El coeficiente de momentos no depende del αwb
CMNP= C
′
M0+ C
′
Mδeδe ⇐
{
C′
M0= CM0
+ CL0
(
N0 − X̄CG)
C′
Mδe= CMδe
+ CLδe
(
N0 − X̄CG)
Esto indica que N0 es el centro aerodinámico del aviónaproximadamente.
NP ≈ ACavion ⇒ Se dice aproximadamente por que se han hechoalgunas simplificaciones.
Aunque con el modelo propuesto se llega a una expresión de N0, en lapráctica, ese N0 se determina mediante ensayos en vuelo.
A continuación veremos que también hay una posición límite haciaadelante del XCG
Rivas & Esteban MVI

56/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
Posición más Adelantada Posible del Centro de Gravedad - I
+
-
0
Recordando la definición de ladeflexión del timón de profundidad deequilibrio
(δe)eq = −CM0
+CMααwb
CMδe
⇓
CMα= CLα
(
X̄CG − N0)
⇓
(δe)eq = −CM0
CMδe
−CLα(X̄CG−N0)
CMδe
αwb
⇓
δe0 = −CM0
CMδe
⇒ X̄CG = N0 ⇒ (δe)eq = δe0
Rivas & Esteban MVI
57/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
Posición más Adelantada Posible del Centro de Gravedad - II
Rivas & Esteban MVI

58/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
Posición más Adelantada Posible del Centro de Gravedad - III
+
-
0
La pendiente negativa varía segúnlas diferentes posibles posicionesX̄CG
Si el X̄CG aumenta, esa pendiente sehace cada vez más pequeña enmódulo
Si se adelanta el centro de gravedad,cada vez se tienen pendientesmayores ⇒ δe se hace más negativopero tiene un límite
δemin tiene una naturaleza:
constructiva: limitación físicaaeronáutica: entrada en pérdida delestabilizador
El δemin nos pone límite a X̄CG a lahora de estabilizar el avión con ciertoángulo de ataque.
El δe0 ⇒ XCG = N0 ⇒ EstabilidadNeutra.
Rivas & Esteban MVI

59/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
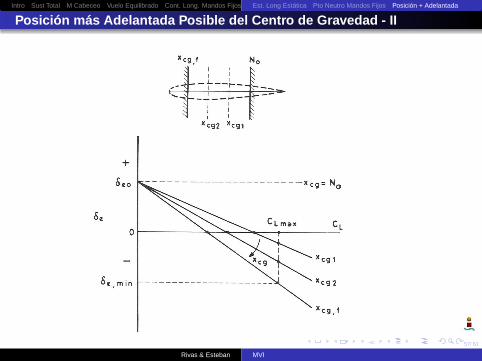
Posición más Adelantada Posible del Centro de Gravedad - III
+
-
0
El δemin nos pone límite a X̄CG a lahora de estabilizar el avión con ciertoángulo de ataque.
Se pueden tener diferentes αwb ⇒hay que garantizar que el avión sepuede equilibrar para cualquierposición de αwb .
Se puede tomar (αwb)max que es elque nos da CLmax
XCG0⇒ posición más atrasada ⇒
cuestión de estabilidad
XCG3⇒ posición más adelantada ⇒
cuestión de control
XCG3nos permite equilibrar
(controlar) el avión con el δemin a unángulo de ataque máximo
Rivas & Esteban MVI

60/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
Posición más Adelantada Posible del Centro de Gravedad - IV
(δe)eq = δe0 −CLα (X̄CG−N0)
CMδe
αwb ⇒ (δe)eq = −CM0
CMδe
−CLα(X̄CG−N0)
CMδe
αwb
X̄CG más avanzado ⇒ αwb = (αwb)max ⇒ (δe)min = −CM0
CMδe
−CLα(X̄CG−N0)
CMδe
(αwb)max
(
X̄CG)
f = N0 −CM0
+ CMδe(δe)min
CLα (αwb)max
Otro elemento importante es la derivada de (δe)eq con respecto αwb
d(δe)eqdαwb
= −CLα(X̄CG−N0)
CMδe
⇒ X̄CG − N0 = 0 ⇒d (δe)eq
dαwb= 0
El criterio de estabilidad, que empezó siendo CMα< 0, se expresa ahora con:
N0 − X̄CG > 0 ⇒d (δe)eq
dαwb< 0
Rivas & Esteban MVI

61/ 61
Intro Sust Total M Cabeceo Vuelo Equilibrado Cont. Long. Mandos Fijos Est. Long. Mandos FijosEst. Long Estática Pto Neutro Mandos Fijos Posición + Adelantada
References I
[MVI ETSIA 2003] J.J. Martínez García y M.A. Gómez Tierno, Apuntes deMecánica del Vuelo I, ETSIA, 2003
[Vinh 1993] Nguyen X. Vinh, Flight Mechanics of High-Performance Aircraft,Cambridge University Press, 1993
[Hull 2007] David G. Hull, Fundamentals of Airplane Flight Mechanics,Springer-Verlag, 2007
[Asselin 1997] Mario Asselin, An Introduction to Aircraft Performance, AIAAEducation Series, 1997.
[Pamadi 2004] Bandu N. Pamadi, Performance, Stability, and Control ofAirplanes, 2nd Edition, AIAA Education Series, 2004.
Rivas & Esteban MVI













![Mandos Finales[1]](https://img.pdfslide.tips/doc/110x75/577d22e81a28ab4e1e987db7/mandos-finales1.jpg)