Embed Size (px)
Citation preview

1
INTRODUZIONE Tra i vari metodi della prospezione geofisica il gruppo dei metodi sismici è senza dubbio quello più largamente applicato. Nel 1984, dei 3500 milioni di dollari spesi mondialmente per l'attività di prospezione geofisica, più del 93% riguarda questo gruppo di metodi. Di tale spesa è stato dedicato oltre il 97% alla ricerca degli idrocarburi. Lo sviluppo dei metodi sismici è infatti legato essenzialmente all'importanza sempre maggiore che ha assunto la ricerca petrolifera nell'economia mondiale. I principi fondamentali della prospezione sismica sono gli stessi della sismologia, sviluppatasi dall’800 per lo studio dei terremoti, i sismologi furono i primi sperimentatori nel secolo XIX e all'inizio del 1900 tentarono le prime applicazioni di "terremoti" artificiali provocati da grandi esplosioni. Differenza sostanziale tra la sismologia classica e la prospezione sismica è che la prima studia i terremoti naturali mentre la seconda si serve di piccoli "terremoti" generati dall'uomo, in luoghi e tempi preordinati, con cariche di esplosivo o altri mezzi. Fu solo dopo la I guerra mondiale (nella quale svilupparono le prime apparecchiature sismiche per la localizzazione dei grossi cannoni) che si ebbero le prime applicazioni della sismica a rifrazione (1919 primo brevetto del tedesco Mintrop e 1921 prima applicazione di Eckhardt negli Stati Uniti). Qualche anno dopo (1924) si ebbero i primi successi con la localizzazione di numerosi domi salini negli Stati Uniti ed in Germania. Verso il 1930 iniziarono ad applicare con successo i metodi a riflessione che ebbero da allora un sempre più vasto impiego. I metodi sismici si sono poi sviluppati utilizzando tutte le innovazioni che la elettronica e le tecniche di informazione proponevano. Così dalle registrazioni su carta sensibile si passò verso il 1958 alle registrazioni su nastro magnetico in forma analogica e verso il 1965 alle registrazioni su nastro magnetico in forma digitale. Quest'ultima innovazione ha portato una grande sofisticazione dei metodi di trattamento dei segnali. In quest'ultimi 40 anni si è inoltre avuto un notevole sviluppo delle applicazioni dei metodi sismici a mare che ha portato a nuove strumentazioni e tecniche di prospezione, il cui uso è stato esteso anche a terra. Un campo in cui i metodi sismici hanno trovato in questi ultimi anni una larga applicazione è quello della meccanica delle terre e delle rocce, ad esempio per la progettazione di grandi opere di ingegneria civile (dighe, strade, ferrovie, etc.), per lo studio di frane etc.; anche in questi campi si va sempre più estendendo l’utilizzazione a mare dei metodi sismici per opere marittime. Altre applicazioni sempre più frequenti si hanno nel campo dei controlli di opere civili come dighe, murature, palificate, ecc.
1.TENSIONI E DEFORMAZIONI
1.1 - Tensioni Data una terna di assi cartesiani, è noto che lo stato di tensione di un mezzo continuo è definito dalle tensioni agenti in ogni punto sui piani coordinati. Si possono distinguere tre tensioni normali σx, σy eσz e tre tensioni trasversali o di taglio τxy , τxz eτyz .
1.2 - Deformazioni

2
Indichiamo con il vettore u(x, y, z) lo spostamento del generico punto e con u, v e w le tre componenti del vettore u secondo i tre assi. Se sono differenti da 0 le derivate di u rispetto almeno ad una delle tre coordinate si avranno variazioni dello spostamento dei vari punti del corpo e quindi deformazioni. Fra le nove derivate di u, v e w rispetto ad x, y, z, possiamo distinguere le
xu
x ∂∂=ε y
vy ∂
∂=ε zw
z ∂∂=ε
che rappresentano le deformazioni (allungamenti o accorciamenti) del corpo nelle direzioni dei tre assi coordinati x, y e z. Per meglio comprendere il significato delle rimanenti sei derivate, sostituiamo ad esse alcune loro combinazioni lineari:
∂∂+∂
∂= xv
yu
xyε
∂∂+∂
∂= xw
zu
xzε
∂∂+∂
∂= zv
yw
yzε
∂∂−∂
∂= yu
xv
xyξ
∂∂−∂
∂= xw
zu
xzξ
∂∂−∂
∂= zv
yw
yzξ
Le prime tre rappresentano deformazioni angolari del sistema, mentre le seconde tre (che corrispondono alle componenti del rotore di u) rappresentano rotazioni rigide intorno agli assi coordinati. Considerando infatti le deformazioni e le rotazioni intorno all'asse z: prendendo in
considerazione la xyε e la xyξ ; consideriamo per semplicità x
vyu
∂∂=∂
∂ ; in tal caso xyξ ènulla. Considerando la figura 1 si può notare che xyε rappresenta la deformazione angolare che ha subito il cubetto elementare intorno all'asse z: nel caso in esame la diagonale non ha ruotato, ciò che indica assenza di rotazioni.
y
x
yu∂∂
xv∂∂
Fig.1

3
Nel caso invece di xv
yu
∂∂−=∂
∂ si ha 0=xyε . Osservando la figura 2 si nota che
si è ottenuta una rotazione rigida senza deformazioni intorno all'asse z.
Deformazione cubica
Consideriamo il cubetto elementare di lati dr, dy e dz. Dopo la deformazione i tre lati saranno diventati
dxxudxdx ∂∂+=' dyy
vdydy ∂∂+=' dzz
wdzdz ∂∂+='
La variazione relativa di volume θ sarà pertanto:
−
∂∂+
∂∂+
∂∂+=−=∆= dxdydzdzz
wdzdyyvdydxx
udxdxdydzVVV
VV 1'θ
Sviluppando ed eliminando i termini superiori al 1° si ha
udivzw
yv
xu =∂
∂+∂∂+∂
∂=θ
1.3 - Relazione tra tensioni e deformazioni E' noto che tutti i corpi sottoposti a tensioni si deformano. Lo studio delle modalità di deformazione ha portato alla costruzione di diversi schemi la cui trattazione matematica fosse relativamente semplice. La scelta dei vari schemi dipende dalle caratteristiche dei materiali oggetto di indagine in relazione con il tipo ed i limiti del problema proposto. Pertanto anche per gli stessi materiali un determinato schema può essere valido se ad esempio vengono contenuti entro determinati limiti le tensioni ed il loro tempo di applicazione, mentre può non essere più valido se tali limiti vengono superati. Si riportano qui di seguito alcuni degli schemi più comuni.
y
x
yu∂∂
xv∂∂
Fig. 2

4
1.3.1 - Corpi elastici Un corpo è elastico quando tra tensioni e deformazioni sussistono relazioni lineari. Tra le conseguenze più immediate è che le deformazioni seguono istantaneamente le tensioni e scompaiono quando le tensioni sono annullate. Nel caso più generale ognuna delle sei deformazioni elementari sarà funzione delle 6 tensioni cioè si avranno nel complesso 36 coefficienti di proporzionalità. Si può dimostrare che i 36 coefficienti costituiscono un determinante simmetrico secondo la diagonale principale ( )kiik aa = (teorema di reciprocità) e pertanto nel caso più generale di totale assenza di simmetria i coefficienti di proporzionalità (costanti o moduli elastici) sono 21. La presenza di elementi di simmetria porta a relazioni o uguaglianze tra alcuni dei coefficienti. Le costanti elastiche indipendenti si riducono perciò di numero. Ad es. esse sono nel sistema monoclino 7, nel sistema tetragonale 6 e 5 nel sistema esagonale. Nel caso di mezzo isotropo le costanti elastiche indipendenti sono 2, cioè una volta determinate due diverse costanti di proporzionalità tra tensioni e deformazioni con una determinata esperienza, tutte le altre deformazioni dovute a qualsiasi altra tensione sono determinate. Le costanti elastiche più note si ricavano dall'esperienza della compressione semplice (o trazione) di un provino cilindrico a pareti laterali libere. Si ricavano in tal modo il modulo di Young E definito da:
xuE∂∂= 1σ (1)
(che ha le dimensioni di una pressione) ed il coefficiente di Poisson (ν ) definito da
yvE
xuzw
xuyv
∂∂=
∂∂∂∂
=
∂∂∂∂
=1συ (2)
che è un numero puro. Mentre il modulo E può variare tra limiti molto ampi (tra 0 e qualche unità •106 kg/cm2) il coefficiente di Poisson può variare nell'intervallo 0-0,5 : il valore 0 indica assenza di dilatazione quando il provino viene compresso, il valore 0,5 è relativo a deformazioni senza variazioni di volume e corrisponde al caso di liquidi. Altri moduli elastici utilizzati sono: il modulo di elasticità al taglio indicato con le lettere µ o G
( )νετµ
+=== 12
EGik
ik (3)
il modulo di elasticità volumetrico (o modulo di deformazione cubica)
( )νθ 2131
−== EpK

5
nella quale p è la pressione idrostatica e θ la corrispondente deformazione volumetrica . Al posto del modulo di Young e del coefficiente di Poisson sono talora utilizzate le "costanti di Lamé " λ e µ: µ è il modulo di elasticità al taglio sopra visto e λ è definito da
( )( )νννλ 211 −+
= E (4) Consideriamo il caso generico di esistenza di tensioni normali σ e di taglio τ. Le deformazioni angolari sono dipendenti solo dalle corrispondenti tensioni di taglio tramite la relazione (3). Le deformazioni lineari dipendono invece dalle tre tensioni normali. Si può scrivere
)(1zyxx EEx
u σσνσε +−=∂∂= (5)
e le analoghe per εy εz .Consideriamo la matrice delle ammettenze ( coefficienti che legano le deformazioni alle tensioni) per il caso di mezzo elastico isotropo. Dalle relazioni precedenti si ha:
µεµε
µεννε
ννεννε
τττσσσ
100000010000001000000100010001
yz
xz
xy
z
y
x
yzxzxyzyx
EEEEEEEEE
−−−−−−
(6)
Se invertiamo la matrice otteniamo le relazioni che legano le tensioni alle deformazioni.
µτµτ
µτµλλλσ
λµλλσλλµλσ
εεεεεε
000000000000000000200020002
yz
xz
xy
z
y
x
yzxzxyzyx
++
+
(7)
pertanto
( ) xzyxx µελθλελεεµλσ 22 +=+++= (8)

6
e le analoghe,
xyxy µετ = (9) e le analoghe. Dall’ultima matrice si può ricavare il significato fisico dei due moduli λ+2µ e λ . Infatti per εy = εz= 0 (caso di deformazione a compressione a deformazioni laterali impedite) si ha
( ) xx εµλσ 2+= e xyx λεσσ == pertanto λ+2µ è il coefficiente di elasticità longitudinale in caso di deformazioni laterali impedite e λ è il modulo che lega la deformazione εx alle tensioni che nascono lateralmente per impedire le deformazioni laterali.
1.3.2 - Corpi non elastici Si esaminano brevemente alcuni schemi che più frequentemente si applicano per rappresentare le deformazioni di rocce al di fuori del campo elastico. 1.3.2.1 – Corpi perfettamente viscosi. I1 loro comportamento può essere rappresentato da uno stantuffo. La relazione tra tensioni e deformazioni è del tipo
t∂∂= εησ
con η costante. Per ε=0 quando t = 0 e σ = costante, si ha
ησε t= (10) la deformazione cioè cresce nel tempo e rimane costante quando la tensione viene annullata. 1.3.2.2.- Sostanze firmoviscose o di Voigt. Lo schema rappresentativo (fig. 3) è costituito da una molla (con costante elastica K) e da uno stantuffo (con costante viscosa η) posti in parallelo.
Fig. 3
Si avrà la relazione
εεησ Kt +∂∂=
K
σ
η

7
Se ε=0 quando t=0 per σ=costante si ha
−=
− ησεKt
eK 1 (11)
cioè si raggiunge la deformazione σ/K che si avrebbe istantaneamente nel caso di corpo puramente elastico, esponenzialmente in tempo infinito. Se si annulla la tensione la deformazione tende ad annullarsi per t →∞ ancora con andamento esponenziale. 1.3.2.3 – Corpi elasto-viscosi o di Maxwell. Il loro comportamento può essere schematizzato da uno stantuffo e da una molla posti in serie (fig. 4)
In questo caso la deformazione complessiva sarà la somma delle due deformazioni, elastica e viscosa cioè per ε=0 quando t=0 e σ= costante, la ε sarà
ησσε t
K += (12) Per tensioni costanti vi sarà perciò una deformazione istantanea all'applicazione della tensione, seguita da una deformazione progressiva nel tempo. Se si annulla le tensione si ha un recupero istantaneo della deformazione dovuta alla molla mentre la deformazione dovuta allo stantuffo rimane costante. Schemi più complessi sono stati costruiti per approssimarsi meglio al comportamento reale delle rocce. Uno dei più noti (fig. 5) è costituito da un elemento di Maxwell con una molla in parallelo.
la relazione tra tensioni e deformazioni è in questo caso data da
ση K
Fig.4
σ
η K
K1
Fig. 5

8
( )
∂∂+
+=∂∂+ tKK
KKKtKεηεσησ
1
11
2 - ONDE ELASTICHE
2.1 - Equazioni di equilibrio Consideriamo un cubetto elementare di lati dx, dy e dz, di densità δ e scriviamo l'equazione di equilibrio dinamico. Trascurando le forze di massa, consideriamo le forze agenti secondo l'asse x sulle 6 facce del cubetto: si potrà scrivere: ( ) ( ) ( ) dxdydzdt
uddxdydxdzdydz xzxzxyxy 2
2''
1'1 δττττσσ =−+−+− (13)
ricordando che '' , xyτσ e '
xzτ possono essere espresse da
dxx∂∂
+= 11
'1
σσσ dyyxy
xyxy ∂∂
+=τττ ' dzz
xzxzxz ∂
∂+=
τττ '
la (13) diventa
2
21
tu
zyxxzxy
∂∂=∂
∂+∂
∂+∂
∂ δττσ (') (14) analogamente per gli assi y e z si può scrivere
2
22
tv
zyxyzxy
∂∂=∂
∂+∂
∂+∂∂ δτστ (15)
2
23
tw
zyxyzxz
∂∂=∂
∂+∂
∂+∂
∂ δσττ (16) Le equazioni differenziali (14), (15), (16) esprimono relazioni tra variazioni di tensione secondo i tre assi ed accelerazioni dello spostamento. Per risolverle bisognerà renderle omogenee sostituendo alle tensioni le deformazioni . Occorrerà pertanto adottare preventivamente uno schema e considerare quindi le relazioni tra tensioni e deformazioni che ne conseguono. Poiché nelle (14), (15), (16) compaiono le derivate delle tensioni rispetto alle coordinate, prima di derivare le relazioni viste nel precedente paragrafo bisognerà ipotizzare se anche le costanti elastiche o viscose variano o no con le coordinate e quindi la omogeneità o meno del corpo
(') Nella (14) si è sostituito a secondo membro la derivata totale rispetto al tempo con la derivata parziale. Ciò è stato possibile in quanto in sismica le ampiezze degli spostamenti sono molto piccole rispetto alle lunghezze d’onda mentre le accelerazioni sono notevoli. Pertanto le variazioni rispetto alle coordinate sono, nel differenziale totale, trascurabili rispetto a quelle rispetto al tempo.

9
considerato. Qui di seguito verrà trattato il caso di mezzo elastico isotropo omogeneo e verranno solo accennate le soluzioni che si hanno in altri casi più comuni.
2.2 - Corpi elastici isotropi omogenei Le relazioni che legano le tensioni alle deformazioni sono la (8) e la (9). Sostituendo tali espressioni nella (14 ) si ha:
( ) ux
zu
yu
xu
zw
yv
xu
xx
zu
xw
zyu
xv
yxu
xtu
2
2
2
2
2
2
2
2
2
2
22
∇+∂∂+=
=
∂∂+∂
∂+∂∂+
∂∂+∂
∂+∂∂
∂∂+∂
∂=
=
∂∂+∂
∂∂∂+
∂∂+∂
∂∂∂+∂
∂+∂∂=∂
∂
µθµλ
µµθλ
µµµθλδ
Con semplice sostituzione di variabili si ottengono le altre due espressioni rispetto agli altri due assi. L'espressione (17) e le analoghe possono essere sintetizzate dalla forma vettoriale
( ) uu 2∇+∇+= µθµλδ && (18) Prendendo la divergenza di entrambi i membri della (18), si ha
( ) ( ) θµλθµθµλθδ 2222
22 ∇+=∇+∇+=∂
∂t (19)
Prendendo invece il rotore, la (18) diviene
( ) ( )uu ×∇∇=×∇∂∂ 2
2
2µδ t (20)
Le due equazioni differenziali (19) e (20), indipendenti tra loro, sono entrambe del tipo
fVtf 222
2∇=∂
∂ (21) che è l'equazione classica della propagazione di un'onda non dispersiva (') , la costante V rappresenta la velocità di propagazione dell'onda. Nel caso della equazione (19) che rappresenta la propagazione di deformazioni volumetriche, la velocità di propagazione è
(') Un’onda si dice dispersiva quando la sua velocità di propagazione varia con la frequenza dell’onda stessa.

10
( )( )ννν
δδµλ
21112
−+−=+= EVp (22)
Tale onda prende il nome di longitudinale, o di compressione e viene di solito indicata con la lettera P. L'equazione (20) rappresenta la propagazione di un disturbo rotazionale; la sua velocità è:
( )νδδµ
+== 12
1EVs (23) Tale onda prende il nome di onda trasversale o rotazionale o di taglio. In sismologia viene indicata con la lettera S. In un mezzo omogeneo, elastico, isotropo, illimitato, possono sussistere solo i due tipi di onde descritte che sono indipendenti tra di loro. Si può notare dal confronto delle (22) e (23) che in uno stesso mezzo l'onda longitudinale è sempre più veloce dell'onda trasversale. Il rapporto delle due velocità dipende solo da ν :
( )νν
2112−−=
s
p
VV
Nella tabella seguente sono riportati i valori di tale rapporto per vari valori di ν.
ν 0 0,1 0,25 0,4 0,5
s
p
VV 2 25,2 3 6 ∞
Per derivare dalle (19) e (20) le altre caratteristiche dell'onda che si propaga (ampiezza, forma, direzione di propagazione ecc.) occorre prefissare le condizioni all'intorno della sorgente della perturbazione. Tale problema non verrà qui trattato limitandoci solo a considerare alcune particolarità nella propagazione delle onde. Si considerano due tipi di fronte d'onda (') differenti: il fronte d'onda piano ed il fronte d'onda sferico. Per fronti d'onda piani, la propagazione del disturbo (che avviene nella direzione della normale ai fronti d'onda) è secondo la retta ortogonale ai fronti d’onda. Assumendo tale retta come asse x, le derivate rispetto ad y e z sono nulle; per un onda sinusoidale
tjexfxtf ω−= )()( 0 la 21 diventa:
2
222xfvf ∂
∂=−ω e quindi 20
22
02
xfvf ∂
∂=−ω
02
2
20
2fvx
f ω−=∂∂
(') Il fronte d’onda ad un dato tempo t è il luogo geometrico dei punti di uno spazio energizzati dall’onda nell’istante t. Le famiglie delle curve ortogonali ai fronti d’onda vengono chiamati raggi sismici e rappresentano le direzioni di propagazione della perturbazione elastica.

11
la soluzione è del tipo
jkxAef ±=0 con vk ω= = numero d’onda la soluzione è
)( tkxjAef ω−±=
Per capire il significato del termine )( tkx ω−± , dividiamolo per k; esso diventa )( vtx −± . Se variamo x e t in modo che il termine tra parentesi rimanga costante anche la funzione f rimane costante. Variare x in maniera proporzionale a t tramite la costante v equivale a traslare la funzione f lungo l’asse x nel tempo con velocità v, pertanto il termine )( vtx −± o l’analogo
)( tkx ω−± indica la propagazione di un evento (deformazione nel nostro caso) nello spazio e nel tempo con velocità v. Il segno + indica la propagazione nella direzione positiva delle ascisse, il segno - la propagazione nella direzione opposta. In genere per un’onda di forma qualsiasi si può indicare come soluzione, per un’onda piana che si propaga nel senso positivo della x, la relazione: f (t, x) = f (x - vt) (24) in cui f è la funzione generica che rappresenta la forma d'onda tra e V è data dalle (22) e (23); l'onda si propaga nel tempo e nello spazio senza mutar forma né ampiezza con velocità v. Si può notare come la velocità di propagazione risponda alla relazione
δMv =
in cui M è il modulo della deformazione che si considera e δ la densità. Nel caso dell’onda longitudinale M è uguale a µλ 2+ che come già visto è il modulo di elasticità per deformazioni assiali con deformazioni laterali impedite; mentre per l’onda trasversale M è il modulo µ relativo alle deformazioni angolari (o al taglio). Si fa rilevare che la densità è al denominatore e che quindi la velocità diminuisce all’aumentare della densità (fattore inerziale). Il modulo M può quindi essere espresso anche da
2VM δ=
in cui V è la velocità relativa alla deformazione caratterizzata dal modulo M. Per fronti d'onda sferici bisognerà esprimere il Laplaciano nel secondo termine delle (19) e (20) in coordinate sferiche r, ϑ, ϕ . Per evidente simmetria, le derivate secondo ϑ e ϕ sono nulle: la (21) pertanto diventa:

12
∂∂+∂
∂=∂∂
2
22
2
2 2rf
rf
rVtf (25)
La soluzione della (25) è del tipo
( ) ( )Vtrfrtrf −= 1,
L'onda pertanto diminuisce d'ampiezza proporzionalmente ad r, mantenendo la sua forma (')
2.3 - Onde in mezzi omogenei isotropi non perfettamente elastici Se si considerano i mezzi indicati nel paragrafo 3.2, nelle relazioni tra tensioni e deformazioni compare anche la variabile tempo. Prendendo ad esempio il caso delle sostanze di Voigt (vedi paragrafo 1.3.2.2), l’equazione differenziale (21) diventa del tipo
∂∂+∇=∂
∂tffVt
f ηδδ 20
22
2(27)
in cui V0 è la velocità che si avrebbe nel caso di η = 0 (mezzo elastico rappresentato dalla sola molla di modulo K=δV2). Si hanno ancora due onde, longitudinale e trasversale indipendenti tra di loro e con diverse velocità di propagazione. Per un'onda sinusoidale piana di frequenza ω propagatesi in direzione x la (27) diventa
( )ωηδω jVxff −∂
∂=− 202
22 e la soluzione è del tipo:
( ) )(
0, tkxjxeeftxf ωγ −−−=
in cui
+= δ
ηωωηδ
ωδγ 20
41
2240
2
42
21
VarctgsenV
+= δ
ηωωηδ
ωδ2
0
41
2240
2
42
21cos VarctgVk
Il termine xe γ− indica che l'onda è smorzata e lo smorzamento dipende dalla frequenza; dalla frequenza dipende anche la velocità di propagazione V data da ω/k (onda dispersiva).
(') Tale conclusione può essere giustificata anche dal punto di vista energetico. Per un’onda sinusoidale è noto che l’energia è proporzionale al quadrato dell’ampiezza. Poiché nella propagazione sferica l’energia specifica per unità di superficie in ogni punto diminuisce con il quadrato del raggio (in quanto con r2 aumenta la superficie), ne consegue che le ampiezze diminuiscono proporzionalmente ad r.

13
Per ηω<< 20V δ (frequenza bassa o mezzi poco viscosi) k è prossimo a ω/ 0V cioè V≅V0 e quindi
l'onda si propaga come in un corpo elastico (onda non dispersiva); γ invece diviene prossimo
30
2
21Vδηω che indica che lo smorzamento dell'onda è proporzionale al quadrato della frequenza.
Per ηω>> 2
0V δ, k e γ tendono entrambi a ( )21
2/ ηδω ciò indica che sia lo smorzamento che la velocità crescono con la radice quadrata della frequenza. Da indagini sperimentali, sembra che nel campo delle frequenze impiegate nelle indagini sismiche (da qualche Hertz a qualche decina di KHz), la maggior parte delle rocce si comportano come mezzi non dispersivi dotati di un piccolo smorzamento funzione crescente della frequenza. Potrebbero pertanto essere assimilate a sostanze di Voigt in cui ηω<< 2
0V δ.Sembra però che il coefficiente di smorzamento sia almeno in molti casi proporzionale alla frequenza; lo smorzamento sarebbe perciò dovuto ad un fenomeno assimilabile più ad attrito tra solidi piuttosto che ad attrito viscoso.
2.4 - Onde in mezzi anisotropi elastici omogenei Le velocità di propagazione delle onde variano con la direzione di propagazione e con l'orientamento della vibrazione. In generale non si avranno né onde longitudinali pure, né onde trasversali pure tranne che in qualche direzione particolare dipendente dagli elementi di simmetria del sistema. Un caso non raro è l’anisotropia dovuta a stratificazioni o a scistosità. Spesso tali corpi possono essere assimilati a cristalli del sistema esagonale, con un piano cioè sul quale le caratteristiche elastiche sono isotrope. Le direzioni di propagazione in cui si hanno onde longitudinali e trasversali pure sono tutte quelle giacenti nel piano di isotropia e quelle nella direzione ad esso normale. Trasversali pure sono anche tutte le trasversali con direzione di vibrazione nel piano di isotropia. In tutte le altre direzioni si hanno onde non pure: solo nel caso di debole anisotropia si può considerare che i due moti, dilatazionale e rotazionale, non siano mai accoppiati e quindi trattare le due onde come onde pure.
2.5 - Onde in mezzi elastici isotropi non omogenei Tra i vari mezzi non omogenei una notevole importanza pratica assumono i mezzi nei quali le caratteristiche elastiche variano secondo una sola direzione; ciò corrisponde ad esempio ad una formazione geologica, petrograficamente omogenea, nella quale la diagenesi sia funzione della sola profondità. Per tali mezzi, nella sostituzione delle espressioni (3) e (9) nella (14) e seguenti, dovranno essere considerate anche le derivate delle costanti elastiche λ e µ con la coordinata z (profondità). Nel caso in esame (variazioni solo nella direzione z) si avranno onde longitudinali e trasversali pure (cioè non accoppiate) solo per propagazioni nella direzione z; nelle altre direzioni si avranno solo onde miste. Se la variazione delle costanti elastiche è molto piccola entro una lunghezza d'onda, si può considerare che le due onde, longitudinali e trasversali, non siano accoppiate ed abbiano in ogni punto, una velocità ricavabile sostituendo nelle (22) e (23) i valori locali delle costanti λ e µ.

14
3 - ONDE ELASTICHE IN PRESENZA DI SUPERFICI DI DISCONTINUITA'
3.1 - Onde piane 3.1.1 – Velocità apparenti - Consideriamo un'onda piana propagantesi con velocità V in una direzione generica i. Consideriamo una direzione generica k formante un angolo θ con il fronte di onda (Fig. 6):
Fig. 6
Si definisce velocità apparente Vk dell'onda lungo la direzione k la velocità con cui il fronte d'onda percorre la retta k. Se consideriamo le posizioni del fronte d'onda in due tempi successivi t1 e t1+∆t(vedi fig. 6), l'intervallo percorso dal fronte d'onda sulla retta k nel tempo ∆t è il segmento AB. La velocità Vk è
tABVk ∆= / ( ) θsentACVk ∆= /
ma AC = V∆t quindi
θsenVVk /= (29)
3.1.2 – Onde in presenza di superfici di discontinuità Consideriamo un'onda piana (longitudinale o trasversale) che incida con un angolo θ su una superficie separante due mezzi dotati di diverse velocità di propagazione delle onde: siano α1 e β1le velocità delle onde longitudinale e trasversale nel mezzo1; α2 e β2 le corrispondenti velocità nel mezzo 2 e δ1 e δ2 le densità. L’energia associata all'onda in parte verrà riflessa nel mezzo 1, in parte verrà trasmessa nel mezzo 2. Poiché, in generale, le tensioni indotte dall'onda incidente sulla superficie di discontinuità k saranno sia tensioni normali che tensioni di taglio, si generano onde longitudinali e trasversali sia riflesse che rifratte. Tali onde si propagheranno nei due mezzi con le velocità proprie dei mezzi stessi. L'onda incidente si propaga lungo la superficie di discontinuità k con una velocità apparente Vkdata da α1/senθ se longitudinale e β1 /senθ se trasversale. Anche le onde riflesse e rifratte da esse generate dovranno avere le stesse velocità apparenti sulla superficie k; si indichi con V la velocità generica dell'onda incidente e con Vr quella dell'onda riflessa o rifratta; indicando con θr l'angolo formato tra il fronte d'onda riflesso o rifratto e la superficie k si dovrà avere
θθ
B
t1t1+ ∆t
A
C
k
i

15
r
rk sen
VsenVV θθ == cioè
rr VV
sensen =θ
θ (30) Ricordando che θ e θr sono anche gli angoli formati dalla normale alla superficie k con i raggi sismici incidente e riflesso o rifratto, l'espressione (30) afferma la validità della legge di Snellius anche nel caso di onde elastiche piane. Poiché è costante sia la velocità apparente Vk sia la velocità reale nei due mezzi, le onde riflesse e rifratte saranno piane. Le ampiezze delle onde riflesse e rifratte dipendono dall’angolo di incidenza e dall’ampiezza dell’onda incidente oltre che dalle caratteristiche elastiche e di densità dei due mezzi. L’onda incidente è definita quando si conoscono le tre componenti delle deformazioni; la componente nella direzione di propagazione (onda longitudinale P) la componente trasversale nel piano principale (') (onda trasversale SV) e la componente trasversale parallela alla superficie k (onda trasversale SH). Per le onde sia riflesse che rifratte si avranno tre componenti incognite P, SV e SH; si avranno quindi complessivamente 6 incognite, che potranno essere determinate tramite le 6 relazioni di continuità (tre per le componenti delle deformazioni e tre per quelle delle tensioni) che si devono verificare in ogni punto della superficie k. Alcune caratteristiche delle onde riflesse e rifratte possono essere ricavate facilmente per alcuni casi particolari. Le onde SH riflesse e rifratte dipendono unicamente dalle onde SH incidenti in quanto tali onde generano sulla superficie k solo deformazioni e tensioni di taglio. Invece le onde P (come anche le onde SV), generano di regola, onde P e SV riflesse e rifratte, in quanto inducono su k tensioni sia normali che di taglio. Pertanto un’onda P genera sulla superficie di separazione un’onda riflessa P ed un’onda riflessa S, un onda rifratta P e un’onda rifratta S: le onde S così generate vengono chiamate onde di conversione. Anche un’onda SV genera 4 onde, 2 riflesse (P ed S) e 2 rifratte (P ed S). Un caso particolare si ha quando la velocità dell’onda (P o S) nel mezzo 1 (V1) è inferiore a quella dell’onda (P o S) nel mezzo 2 (V2). In questo caso esiste un angolo di incidenza dell’onda incidente ic per cui l’angolo di rifrazione è π/2 tale angolo è dato da
2
1VVisen c = (31)
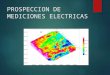
per i ≥ ic non si ha più onda rifratta del tipo considerato ma solo onda riflessa. Come si è detto nel caso della figura esisterà anche un altro angolo critico ic2 in quanto β2 èmaggiore di α1. Per questo angolo l’ampiezza delle onde trasversali rifratte va a zero. A titolo di esempio nella figura 7 sono riportati, per un'onda P incidente, i rapporti tra le ampiezze delle onde riflesse e rifratte longitudinali e trasversali e l'ampiezza delle onde incidenti in funzione dell'angolo di incidenza. Nel caso riportato si ha α1<β2<α2 e pertanto si hanno due angoli critici ic1dato da arcsen α1/α2 e ic2 dato da arcsen α1/β2 . Si può notare che in prossimità dell'angolo ic1 si ha un aumento delle ampiezze delle onde P. In corrispondenza dell'angolo ic2 le ampiezze delle P rifratte si annullano mentre diventano massime le P riflesse.
(') Il piano principale è il piano contenente la normale alla superficie k ed il raggio sismico dell’onda incidente e delle onde riflesse e rifratte.

16
Un altro caso particolare si ha per incidenza normale alla superficie k- In questo caso le onde longitudinali generano solo onde longitudinali, riflesse e rifratte, e le trasversali solo onde trasversali. Consideriamo il caso di un’onda piana che incide normalmente una superficie piana separante due mezzi elastici, omogenei, isotropi, semillimitati con diverse caratteristiche elastiche e/o di densità; assumiamo un sistema di riferimento cartesiano on l’asse z ortogonale alla superficie, positivo verso il basso, e con l’origine sulla superficie stessa: la superficie è pertanto definita da z=0. Se l’onda è longitudinale si dovranno solo considerare le componenti dello spostamento e degli sforzi lungo l’asse z (analogamente per un’onda trasversale le componenti da considerare sarebbero solo quelle rispetto ad x o rispetto ad y). Consideriamo quindi un’onda incidente piana longitudinale di Ampiezza A0 e per semplicità sinusoidale che procede verso il basso nel mezzo 1 con caratteristiche δ1 e M1 (o V1) sovrastante un mezzo 2 con caratteristiche δ2 e M2 (o V2) con δ la densità, M modulo di elasticità della deformazione data dall’onda e V velocità. Essa sarà data da :
)(00
1 tzkjeaA ω−= Vk ω= e 2VM δ= (32) Essa genererà un’onda riflessa di ampiezza A1 che viaggia verso l’alto (-z) nel mezzo 1 rappresentata da:
)(11
1 tzkjeaA ω−−= (33) ed un onda rifratta di ampiezza A2 che si propaga verso il basso nel mezzo 2 con caratteristiche δ2ed M2 rappresentata da:
)(22
2 tzkjeaA ω−= (34) a1 e a2 sono le incognite che devono essere determinate con le condizioni al contorno sul piano z=0
8.11
2 =αα 1
1
2 =δδ
2576.021 ==νν
Fig. 7
-0,2-0,1
00,10,20,30,40,50,60,70,80,9
1
0 10 20 30 40 50 60 70 80 90 θθθθ
Rapp
ortit
rale
ampie
zze
P riflesseS riflesseP rifratteS rifratte
ic1 ic2
028.11
2 =αβ
°== 7.332
11 α
αarcsenic
°== 5.762
12 β
αarcsenic

17
Tali condizioni sono:
210 AAA =− per gli spostamenti e 210 σσσ =− per gli sforzi (35) Ricordando che z
AM ∂∂=σ (36)
Sostituendo nelle 35 le relazioni 32, 33 e 34 , tenuto conto della 36 e che tali relazioni sono valide per z=0, si ha:
tjtjtj eaeaea ωωω210 =−
tjtjtj eakjMeaMjkeajkM ωωω22211011 =+
Se si semplificano le relazioni sopra indicate ricordando che VkM ω= • VV ωδδ =2 si ha
012 aaa =+
011111222 aVaVaV δδδ =−
risolvendo il sistema si ottiene:
1122
1122
0
111
11
VV
VVaa
δδ
δδ
−=
1122
1111
0
211
11
VV
VVaa
δδ
δδ
−
−=
il coefficiente di riflessione, cioè il rapporto tra ampiezza dell’onda riflessa e ampiezza dell’onda incidente, è quindi dato da:
Coefficiente di riflessione 1122
1122
0
11 VV
VVaaR δδ
δδ+−
== (37)
il prodotto δV prende il nome di impedenza acustica del mezzo. L'onda riflessa avrà sempre ampiezza minore o al massimo uguale a quella dell'onda incidente. Si può notare che per ∞→1122 / VV δδ R tende a 1 e quindi l'onda riflessa ha la stessa ampiezza e fase dell'onda incidente; per 1/ 1122 =VV δδ , R è uguale a 0 e non si ha onda riflessa. Per 0/ 1122 →VV δδ , R è –1: l'onda riflessa rispetto all'onda incidente avrà la stessa ampiezza ma sarà in opposizione di fase. Nello stesso caso di incidenza normale, il rapporto tra onda rifratta e onda incidente (coefficiente di rifrazione) è dato da

18
Coefficiente di rifrazione 12211
11
0
2 12 RVVV
aaR f −=
+== δδ
δ (38) Si osserva che Rf (sempre positivo) è minore di 1 per 2211 VV δδ < (non si ha onda rifratta quando
0/ 2211 =VV δδ ); è ovviamente 1 quando 2211 VV δδ = e tende al valore 2 quando δ1V1 è molto maggiore di δ2V2 : cioè nel passaggio da un mezzo con impedenza acustica maggiore ad un mezzo con impedenza acustica minore si ha una amplificazione dell’onda: tale fenomeno, non intuitivo, è una causa degli effetti maggiormente disastrosi dei terremoti su manufatti fondati su terreni a bassa velocità di propagazione delle onde elastiche. Le espressioni (37) e (38) possono essere utilizzate in prima approssimazione anche se il fronte d'onda è curvo per piccoli angoli di incidenza.
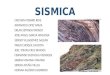
3.2 - Onde sferiche Sia in sismologia che nelle prospezioni sismiche, le sorgenti reali di vibrazione possono in genere considerarsi come sorgenti puntiformi che generano onde sferiche. La teoria delle onde piane può quindi in realtà essere utilizzata solo considerando porzioni di spazio molto piccole rispetto alla loro distanza dalla sorgente. Il problema dell'incidenza di un'onda sferica su una superficie di discontinuità è uno dei più complessi nel campo della sismologia ed è stato risolto teoricamente in maniera completa solo nel 1939 da Cagniard. Lo studio di Cagniard ha mostrato che anche per le onde sferiche che incidono su un piano di separazione si originano onde riflesse e rifratte la cui direzione di propagazione segue le leggi dell'ottica geometrica. Supponiamo che la sorgente S nel mezzo 1 generi un impulso longitudinale che si propaga nel mezzo stesso; sulla superficie di separazione si originano due onde rifratte (longitudinale e trasversale) che si propagano nel mezzo 2 e due onde riflesse (sempre P ed S) che si propagano nel mezzo 1. L'onda riflessa longitudinale è anch'essa una onda sferica mentre i fronti di onda della riflessa trasversale e delle rifratte sono iperboloidi. Se le velocità nel mezzo 2 sono minori di quelle del mezzo 1 si originano solo queste 4 onde che si propagano nei due mezzi con le velocità proprie dei mezzi stessi. Diverso invece è il fenomeno quando la velocità nel mezzo 2 è maggiore di quella nel mezzo 1. Consideriamo per semplicità le sole onde longitudinali, ma le considerazioni seguenti possono estendersi anche alle onde S o alle onde convertite. Pertanto consideriamo il caso di 12 αα > caso molto interessante ai fini della prospezione.
In questo caso (vedi fig. 8) esiste un angolo critico di incidenza ic oltre il quale non si ha più rifrazione, ma solo riflessione totale. Per angoli d’incidenza inferiori o uguali ad ic l'onda diretta genera l'onda rifratta e l’onda riflessa nel mezzo 1; in particolare il raggio diretto che incide la superficie con l'angolo limite genera un raggio rifratto che, per la legge di Snellius, si propaga lungo la superficie di separazione con velocità α2 ,costituendo così il lembo estremo
S
i
r
ic
V1
V2

19
dell'onda rifratta nel mezzo 2. Consideriamo ora con quale velocità apparente Va l’onda diretta investe la superficie di separazione: se i è l’angolo di incidenza si ha
isenVa 1α=
per i = ic Va è uguale a α2per i > ic Va è minore di α2 e quindi l’onda diretta dopo aver generato l’onda rifratta fino al punto di incidenza con angolo ic , percorre la superficie con velocità inferiore a quella dell’onda rifratta che dal punto di incidenza con angolo ic si propaga lungo la superficie nel mezzo 2 con velocità α2.Pertanto l’onda rifratta energizza la superficie prima dell’arrivo dell’onda diretta (fig. 9a) generando nel mezzo 1 una nuova onda longitudinale
Per semplicità possiamo ricavare il suo fronte d'onda applicando il principio di Huygens. Consideriamo i diversi punti posti sulla superficie di discontinuità (fig. 9b). Essi vengono investiti dall'impulso rifratto che percorre la superficie di discontinuità con velocità α2 e divengono così a loro volta sorgenti di vibrazioni che si propagano nel mezzo 1 con velocità α1. L'inviluppo dei fronti sferici, originati dalle sorgenti elementari, fornirà il fronte della nuova onda. Le tracce di tale fronte sul piano di sezione della figura sono tratti di rette che formano con il piano di separazione lo stesso angolo limite ic come può rilevarsi considerando ad esempio il triangolo generico ABC: il lato AB è infatti uguale a α2∆t ed il lato AC è α1∆t, quindi si ha
cseniABCsen ==2
1)( αα
Il fronte della nuova onda che viene chiamata "onda conica" o "onda di testa", si muove pertanto
Fig. 9a
fronte dell'onda incidente
fronte d'onda rifratto
ic
fronte d'onda riflessa

20
secondo una direzione che forma, con la normale alla superficie k, l'angolo critico ic. Data la evidente simmetria intorno alla retta normale per S alla superficie k, i nuovi fronti d'onda sono fronti d'onda “conici”. Tali fronti d'onda (fig. 10) sono tangenti ai fronti riflessi in corrispondenza del generico raggio riflesso secondo l'angolo limite in quanto tale raggio sismico è normale sia al fronte d'onda riflesso che a quello conico ('). II percorso complessivo dell'onda sismica, che dà luogo al fronte di onda conico, appare costituito, a partire dalla sorgente, dal raggio sismico critico nel primo mezzo, dalla superficie di separazione (percorsa a velocità α2) ed infine da tutti i nuovi raggi sviluppantisi nel mezzo V1 che fuoriescono dalla superficie k secondo l'angolo limite.
(') Oltre a tale fronte d’onda rifratto longitudinale (che in sismologia viene indicato con le lettere PP2P1) esistono anche due fronti d’onda rifratti trasversali, uno propagatesi nel primo mezzo (PP2S1) e uno nel secondo mezzo (P1P2S2). Inoltre se α1 è minore di β2 l’onda longitudinale incidendo secondo l’angolo i2 (i2 = arcsen α1/β2) sulla superficie di separazione si propaga come trasversale lungo la superficie stessa generando a sua volta un’onda rifratta trasversale (PS2S1) nel mezzo 1.
Fig.9b
A
0T 1T
3TT2
Ondarifr
attaT
T1
1 T2
Fronti sfericiTT2
3
C
BT2 3T
Fronte rifratto nel mezzo 13T
3T
α1
α2
icic
Fronte rifratto nel mezzo 2
Fig.10
S
onda diretta
onda conicak
onda rifratta
icic
onda riflessa

21
3.3 - Presenza di più superfici di discontinuità Nel caso che siano presenti più superfici di discontinuità per ciascuna superficie di discontinuità avverranno i fenomeni sopra descritti e quindi riflessioni e rifrazioni. Ciascuna onda rifratta e riflessa generata da una superficie verrà riflessa e rifratta dalle altre superfici e così via. Le varie onde potranno in genere interferire tra loro. I1 calcolo delle ampiezze delle diverse onde che così si vengono a generare è molto complesso e per onde piane può essere risolto mediante il calcolo matriciale la cui applicazione è semplificata dall'uso dei calcolatori elettronici. Per le onde sferiche il problema è molto più complesso: solo per strati quasi paralleli e per incidenze prossime alla normale agli strati, i metodi di calcolo per le onde piane possono essere applicati anche alle onde sferiche.
3.4 - Presenze di spigoli - onde diffratte Quando la superficie di separazione non è piana, le considerazioni fatte nei precedenti paragrafi possono ancora essere applicate purché i raggi di curvatura della superficie siano grandi rispetto alle lunghezze d'onda. Per piccole curvature, l'approssimazione dell'ottica geometrica non è più applicabile; il fronte d'onda subisce deviazioni per effetto dei fenomeni di diffrazione. La forma dei fronti di tale onda diffratta può essere ricostruita utilizzando il principio di Huygens. Consideriamo ad esempio il caso semplice di un'onda piana che incide su di uno schermo rigido semi indefinito con direzione normale allo spigolo dello schermo (vedi fig. 11). Quando l'onda diretta incide sullo spigolo, i punti dello spigolo diventano sorgenti di vibrazione e generano onde sferiche. L'inviluppo di tali onde sferiche è un’onda cilindrica la cui ampiezza è funzione della distanza dallo spigolo, dell'angolo di incidenza θ, dell'angolo formato tra la normale allo schermo e la direzione generica di propagazione α ed infine dalla lunghezza d'onda. Nella figura l’ampiezza dell'onda per le varie direzioni di propagazione è indicata schematicamente dalla lunghezza dei tratti con cui è rappresentato il fronte dell'onda diffratta.
Fig.11

22
3.5 - Onde superficiali
Oltre alle onde sopra viste, la presenza di superfici di discontinuità genera altre onde che si propagano lungo la superficie stessa, una prima onda fu ricavata matematicamente da Lord Rayleigh nel caso di un suolo elastico seminfinito omogeneo. Il moto dei punti investiti dall'onda è ellittico, retrogrado e polarizzato nel piano verticale contenente la direzione di propagazione. Fu ricavato che l'ampiezza dell'onda di Rayleigh (che si origina per diffrazione di onde sferiche riflesse sulla superficie di discontinuità) diminuisce esponenzialmente con la distanza dalla superficie di discontinuità; non si ha pertanto propagazione di energia verso il basso; la propagazione è di tipo cilindrico radiale e quindi le ampiezze diminuiscono con la radice quadrata della distanza dalla sorgente: ciò spiega perché le onde di Rayleigh, per le maggiori distanze dalla sorgente, sono le più vistose nei sismogrammi. La velocità di tali onde è di poco inferiore alla velocità delle onde trasversali. Poiché l'attenuazione con la profondità è maggiore all'aumentare della frequenza considerata, nel caso di mezzi non omogenei (o stratificati) con velocità crescente verso il basso, le onde con frequenze maggiori presentano velocità di propagazione minori (onde dispersive). Onde del tipo di Rayleigh possono essere generate al contatto di due qualsiasi mezzi con caratteristiche differenti. Un secondo tipo di onde superficiali compare nel caso di uno strato superficiale giacente su di un substrato con velocità delle onde trasversali maggiore di quelle dello strato. Tale onda, che prende il nome di onda di Love, sembra si propaghi per riflessioni multiple delle onde trasversali all'interno dello strato; è pertanto un'onda che in superficie appare simile ad un'onda trasversale polarizzata sul piano orizzontale; presenta però una dispersione delle velocità che sono comprese tra la velocità delle onde trasversali dello strato e quella del substrato.
4 - ONDE UTILIZZATE NELLA PROSPEZIONE SISMICA Si è visto nei precedenti paragrafi che le varie onde che si generano con una sorgente in presenza o meno di superfici di discontinuità, si propagano nei vari mezzi in dipendenza delle caratteristiche elastiche e geometriche dei mezzi stessi. Dallo studio della loro propagazione si può pertanto risalire alla individuazione delle caratteristiche stesse. Così in sismologia spesso vengono presi in considerazione tutti i tipi di onde dalle longitudinali alle superficiali in quanto si hanno a disposizione le sole registrazioni dei terremoti naturali e da questi si tenta di risalire alle strutture dell'intero globo. Nella prospezione geofisica, nella quale si utilizza energia generata dall'uomo, gli elementi a disposizione possono essere molto più numerosi e completi e pertanto di regola vengono prese in considerazione le sole onde longitudinali che permettono analisi più semplici e sicure. In questi ultimi anni stanno assumendo maggiore importanza le onde trasversali, sia generate direttamente dall’uomo, sia generate come onde di conversione di onde P. La misura delle caratteristiche delle due onde permette infatti determinazioni più complete sulle caratteristiche del sottosuolo. Anche le onde superficiali, fino a poco tempo fa considerate solo disturbi, cominciano ad essere utilizzate, come in sismologia, per la misura della velocità delle onde S. Le varie prospezioni sismiche vengono effettuate, eccetto qualche caso particolare (ad esempio le determinazioni di velocità in fori da sonda) generando le onde elastiche in superficie o in prossimità della superficie del suolo o del mare e ponendo gli strumenti di ricezione delle onde anch'essi in superficie.Tra le varie onde longitudinali che si possono generare in presenza di superfici di discontinuità, assumono particolare importanza quelle che ritornano in superficie portando informazioni sulle formazioni geologiche attraversate: tali onde sono le onde riflesse e le onde coniche. Da qui la nascita dei due grandi metodi di prospezione: il metodo sismico a riflessione ed il metodo sismico a rifrazione che saranno trattati in seguito.