Embed Size (px)
Citation preview
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
MÉTODOS DIRECTOS E ITERATIVOS PARA LA SOLUCIÓN DE SISTEMAS DE ECUACIONES LINEALES
Jorge Mario Padilla Reyes
Universidad industrial de SantanderMétodos Numéricos
2010
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
MATRICES
Una matriz es un conjunto de elementos de cualquier naturaleza aunque, en general, suelen ser números ordenados en filas y columnas.
Se llama matriz de orden "n × m" a un conjunto rectangular de elementos aij dispuestos en n filas y en m columnas. El orden de una matriz también se denomina dimensión o tamaño, siendo n y m números naturales.
Las matrices se denotan con letras mayúsculas: A, B, C,... y los elementos de las mismas con letras minúsculas y subíndices que indican el lugar ocupado: a, b, c,... Un elemento genérico que ocupe la fila i y la columna j se escribe aij. Si el elemento genérico aparece entre paréntesis también representa a toda la matriz: A = (aij)
A=(a11 a12 …… … …an1 an2 …
a1m⋮anm
)
Cuando nos referimos indistintamente a filas o columnas hablamos de líneas.El número total de elementos de una matriz An×m . En matemáticas, tanto las Listas como las Tablas reciben el nombre genérico de matrices.
1. Tipos de Matrices:
1.1 Matriz simétrica: Es aquella matriz cuadrada en donde los valores de ai,j=aj,i
A=(2 3 43 5 84 8 2)
1.2 Matriz Cuadrada: es aquella matriz que está compuesta por un número igual tanto de filas como de columnas.

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
A=(2 1 44 0 105 6 3 )
1.3 Matriz Traspuesta: encontramos esta matriz cuando a partir de una matriz ya establecida cambiamos el ordenamiento de filas por columnas y viceversa, de la siguiente manera, teniendo un matriz A=a(i,j) obtenemos su transpuesta así At=a(j,i)
A=(2 3 44 3 85 8 1); A t=(2 4 5
3 3 84 8 1)
1.4 Matriz Triangular: es una matriz cuadrada que contiene todos los elementos por encima o por debajo de la diagonal principal nulos.
Matriz triangular superior=(2 3 40 5 100 0 2 )
Matriz triangular inferior=(2 0 04 5 04 8 2)
1.5 Matriz Aumentada: Este tipo de matriz se obtiene de unir dos matrices, de la siguiente manera:
A=(2 31 4); B=(57)
De esta unión se obtiene la matriz aumentada que se denota:
( A|B )=(2 3 51 4 7)
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
Esta notación es útil para resolver sistemas de ecuaciones lineales dados por matrices cuadradas. En álgebra lineal, se utiliza la matriz aumentada para representar los coeficientes así como las constantes de cada ecuación.
Ejemplo 1
{ x+2 y+3 z=03 x+4 y+7 z=26 x+5 y+9 z=11
A=(1 2 33 4 76 5 9)B=( 0211)(A∨B)=(1 2 3
3 4 76 5 9
0211)
1.6 Matriz bandeada: En matemáticas una matriz se le llama Matriz Banda o bandeada cuando es una matriz donde los valores no nulos son confinados en un entorno de la diagonal principal, formando una banda de valores no nulos que completan la diagonal principal de la matriz y más diagonales en cada uno de sus costados.
Ejemplo 2
A = (a11a2100
a12a22a320
0 0a23 0a33 a34a43 a44
)La matriz anterior tiene un ancho de banda de 3 y recibe el nombre especial de matriz tridiagonal.
2. Operaciones entre matrices

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos2.1 Suma
Si las matrices A=(aij) y B=(bij) tienen la misma dimensión, la matriz suma es:
A+B=(aij+bij).
La matriz suma se obtiene sumando los elementos de las dos matrices que ocupan la misma posición.
A=(2 30 5)B=(6 1
4 9)
A+B=(2+6 3+10+4 6+9)=(8 4
4 15)
A−B=(2−6 3−10−4 6−9)=(−4 2
−4 −3)
Propiedades de la suma de matrices
Interna:
La suma de dos matrices de orden m x n es otra matriz dimensión m x n.
Asociativa:
A + (B + C) = (A + B) + C
Elemento neutro:
A + 0 = A
Donde O es la matriz nula de la misma dimensión que la matriz A.
Elemento opuesto:
A + (−A) = O

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos NuméricosLa matriz opuesta es aquella en que todos los elementos están cambiados de signo.
Conmutativa:
A + B = B + A
2.2Multiplicación
Dadas dos matrices A y B, tales que el número de columnas de la matriz A es igual al número de filas de la matriz B; es decir:
A=(aij)m×n y B=(aij)n× p
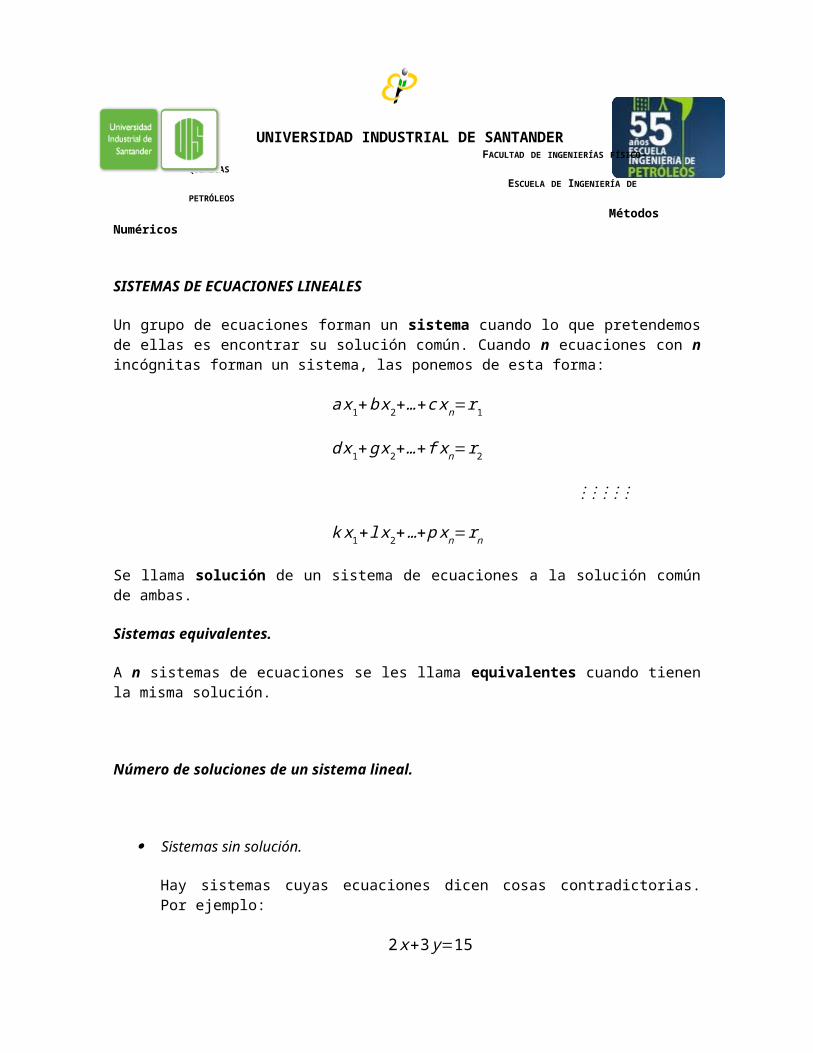
La multiplicación de A por B, que se denota A·B, A×B o simplemente AB, está definida como:
AB=(c ij)m×p
Donde cada elemento c ij está definido por:
c ij=∑r=1
n
a irbrj
Ejemplo 3:

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
A=(1 23 45 6 )B=(1 2 3
4 5 6)
AB=( (1∗1+2∗4 ) (1∗2+2∗5 ) (1∗3+2∗6 )(3∗1+4∗4 ) (3∗2+4∗5 ) (3∗3+4∗6 )(5∗1+6∗4 ) (5∗2+6∗5 ) (5∗3+6∗6 ))
AB=( 9 12 1519 26 3329 40 51)
2.3. Determinantes
El determinante de una matriz A(n,n), es un escalar o polinomio, que resulta de obtener todos los productos posibles de una matriz de acuerdo a una serie de restricciones, siendo denotado como |A|. El valor numérico es conocido también como modulo de la matriz.
A continuación vamos a ver una de las formas de obtener el determinante (método cofactores).
Algoritmo:
|A|=a11 [si n=1 ]
|A|=∑j=1
m
aij|A ij|(−1 )i+ j [si n>1 ]
Siendo n igual al número de columnas, y Aij es el resultado de eliminar la fila i y la columna j de la matriz original.
Ejemplo 4
Calcular el determinante de la siguiente matriz:
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
A=(1 36 4)
Operando el algoritmo anterior, y teniendo en cuenta que i es siempre 1, obtendremos:
Paso 1: a11=1. al eliminar la fila 1 y columna 1 de la matriz obtenemos |4|, mientras en la suma i+j=2.
Paso 2: a12=3 mientras la eliminación de la fila 1 y columna 2 da como resultado |6| y la suma i+j=3.
Es decir:
A=(1 36 4)=1|4|(−1 )2+3|6|(−1 )3=−14
SISTEMAS DE ECUACIONES LINEALES
Un grupo de ecuaciones forman un sistema cuando lo que pretendemos de ellas es encontrar su solución común. Cuando n ecuaciones con n incógnitas forman un sistema, las ponemos de esta forma:
a x1+b x2+…+c xn=r1
d x1+g x2+…+ f xn=r2
⋮ ⋮ ⋮ ⋮ ⋮
k x1+ l x2+…+ p xn=rn
Se llama solución de un sistema de ecuaciones a la solución común de ambas.
Sistemas equivalentes.

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos NuméricosA n sistemas de ecuaciones se les llama equivalentes cuando tienen la misma solución.
Número de soluciones de un sistema lineal.
Sistemas sin solución.
Hay sistemas cuyas ecuaciones dicen cosas contradictorias. Por ejemplo:
2 x+3 y=15
2 x+3 y=9
En este caso, nos dice por una parte que 2x+3y=15 y por otra que 2x+3y=9 y eso es absolutamente imposible porque para eso tendrían que adoptar las incógnitas valores distintos en cada ecuación y entonces no sería un sistema de ecuaciones.
Así sacamos la conclusión de que el sistema no tiene soluciones comunes y entonces se dice que el sistema es incompatible.
Sistemas con infinitas soluciones.
Hay sistemas cuyas ecuaciones dicen lo mismo o que una ecuación es proporcional a la otra, es decir, tenemos dos veces la misma ecuación. Veamos un ejemplo:
2 x+3 y ¿152 x+3 y ¿15
(1)
2x+3 y ¿154 x+6 y ¿30
(2)
En el ejemplo (1) tenemos que las dos ecuaciones son idénticas y en el ejemplo (2) tenemos que la segunda ecuación es la misma, pero multiplicada por 2, entonces si dividimos toda la ecuación por 2, obtendremos de nuevo dos ecuaciones idénticas.

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos NuméricosEn este caso el sistema se llamará compatible determinado, porque tiene soluciones, pero éstas son infinitas.
METODOS PARA LA SOLUCION DE SISTEMAS DE ECUACIONES LINEALES
1. METODOS DIRECTOS
1.1.Método de Cramer
Es aplicable si el sistema tiene igual número de ecuaciones que de incógnitas n=m y el determinante de la matriz de coeficientes es distinto de cero. Es decir, un sistema de Cramer es, por definición, compatible determinado y, por tanto, tiene siempre una solución única.
El valor de cada incógnita xi se obtiene de un cociente cuyo denominador es el determinante de la matriz de coeficientes, y cuyo numerador es el determinante que se obtiene al cambiar la columna i del determinante anterior por la columna de los términos independientes.
Ejemplo 5
Resolver el siguiente sistema compatible determinado
x+ y+z=112 x− y+z=53 x+2 y+z=24
L a matriz aumentada del sistema sería:
(1 1 12 −1 13 2 1|
11524 )
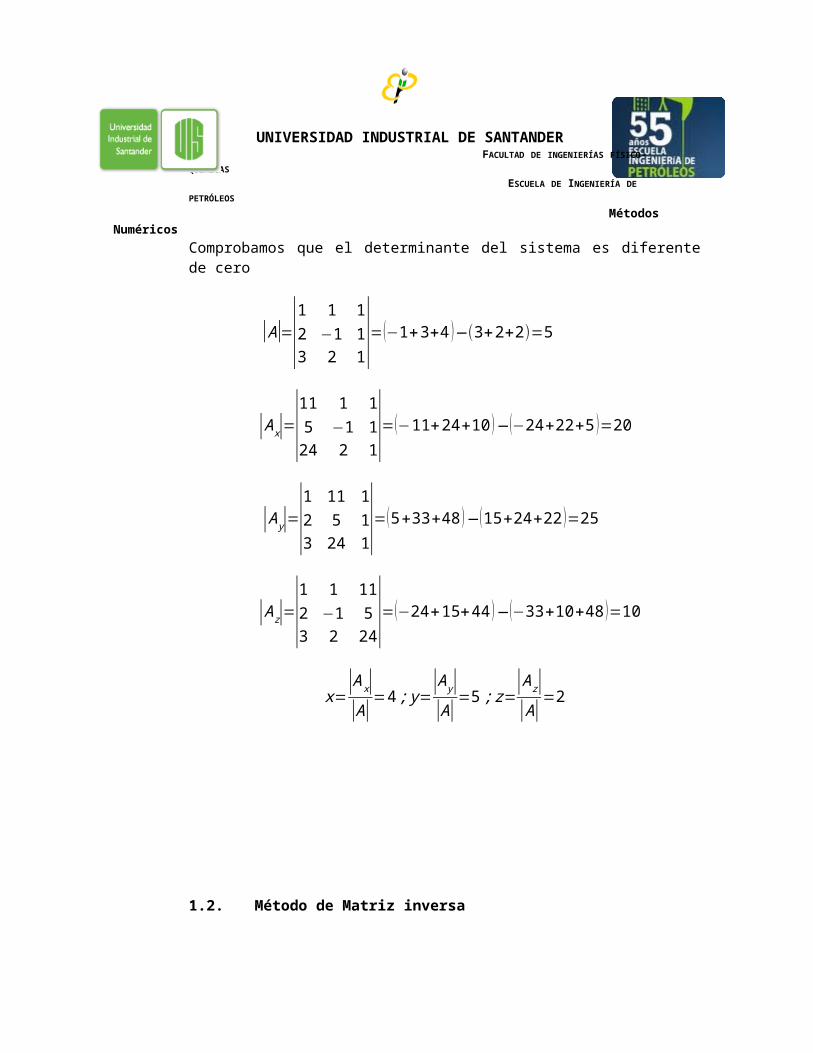
Comprobamos que el determinante del sistema es diferente de cero
|A|=|1 1 12 −1 13 2 1|=(−1+3+4 )— (3+2+2)=5
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
|Ax|=|11 1 15 −1 124 2 1|=(−11+24+10 )— (−24+22+5 )=20
|A y|=|1 11 12 5 13 24 1|=(5+33+48 )— (15+24+22 )=25
|A z|=|1 1 112 −1 53 2 24|=(−24+15+44 )— (−33+10+48 )=10
x=|Ax||A|
=4 ; y=|A y||A|
=5 ; z=|A z||A|
=2
1.2. Método de Matriz inversa
Es aplicable si el sistema tiene igual número de ecuaciones que de incógnitas n=m y el determinante de la matriz de coeficientes es distinto de cero. Es decir, resuelve sistemas compatibles determinados (no-homogéneos).
A∗x=BA−1∗A∗x=A−1∗BI∗x=A−1∗Bx=A−1∗B
Ejemplo 6
Solucionar el sistema de ecuaciones propuesto en el ejemplo 5 mediante el método de la matriz inversa.
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricosx+ y+z=112 x− y+z=53 x+2 y+z=24
A−1= 1|A|
(Adj (A ))t
|A|=|1 1 12 −1 13 2 1|=5 ;(Adj ( A ))t= (−3 1 2
1 −2 17 1 −3)
( xyz )=15 (−3 1 21 −2 17 1 −3)(
11524 )=(452)
1.3. Método de Gauss
El método de Gauss, también conocido como método de eliminación simple de Gauss, es una de las primeras técnicas empleadas por actuarios, matemáticos e ingenieros para la resolución de sistemas de ecuaciones. El método comprende dos fases:
Eliminación de las incógnitas hacia adelante
Sustitución hacia atrás
La primera fase tiene el objetivo de reducir el sistema original a una forma triangular superior. Por ejemplo, para un sistema de n ecuaciones en n incógnitas que se representa con la siguiente matriz aumentada:
(a11x1 a12 x2 … a1n xna21 x1 a22 x2 … a2n xn⋮an1 x1
⋮an2 x2
⋱…
⋮ann xn
|b1b2⋮bn
)Una vez se tiene la matriz aumentada se hacen una serie de transformaciones para convertir los elementos bajo la diagonal superior en ceros.
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
(a11 x1 a12 x2 … a1n xn0 a22 x2 … a2n xn⋮0
⋮0
⋱…
⋮ann xn
|b1b2⋮bn
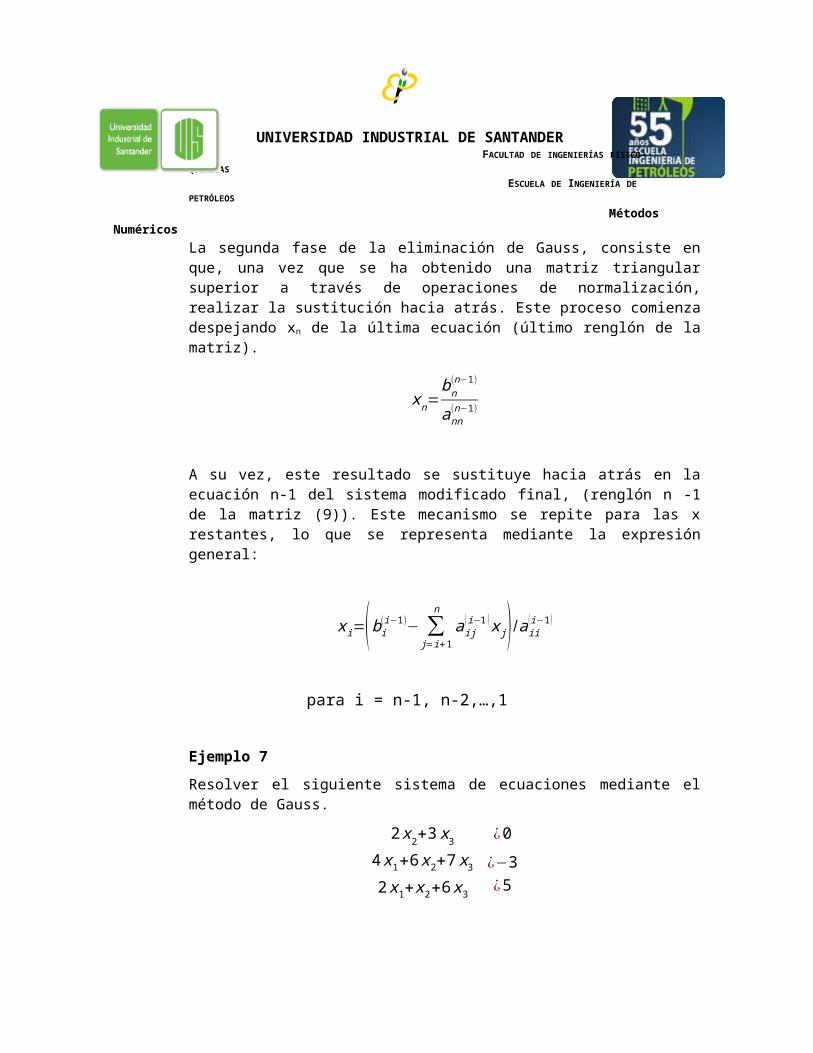
)La segunda fase de la eliminación de Gauss, consiste en que, una vez que se ha obtenido una matriz triangular superior a través de operaciones de normalización, realizar la sustitución hacia atrás. Este proceso comienza despejando xn de la última ecuación (último renglón de la matriz).
xn=bn
(n−1)
ann(n−1)
A su vez, este resultado se sustituye hacia atrás en la ecuación n-1 del sistema modificado final, (renglón n -1 de la matriz (9)). Este mecanismo se repite para las x restantes, lo que se representa mediante la expresión general:
x i=(bi(i−1 )− ∑j=i+1
n
aij( i−1 ) x j)/aii(i−1)
para i = n-1, n-2,…,1
Ejemplo 7
Resolver el siguiente sistema de ecuaciones mediante el método de Gauss.
2 x2+3 x3 ¿04 x1+6 x2+7 x32x1+x2+6 x3
¿−3¿5
A continuación construimos la matriz aumentada; antes de hacer esto reordenamos las ecuaciones de tal forma que no hayan ceros en la diagonal principal.
(4 6 70 2 32 1 6|
−305 )F3=F3−F1/2→ (4 6 7
0 2 30 −2 5/2|
−3013 /2)F3=F3+F2→ (4 6 7
0 2 30 0 11/2|
−3013 /2)
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricosx3=13/11
x2=−3 (13/17 ) /2=−39/22x1=(−3+6 (39 /22 )−7 (13/11 ) )/4=−7 /44
x=(−7 /44−39/2213 /11 )
1.4. Método de Gauss-Jordan
El Método de Gauss–Jordan o también llamado eliminación de Gauss – Jordan, es un método por el cual pueden resolverse sistemas de ecuaciones lineales con n números de variables, encontrar matrices y matrices inversas, en este caso desarrollaremos la primera aplicación mencionada.
Para resolver sistemas de ecuaciones lineales aplicando este método, se debe en primer lugar anotar los coeficientes de las variables del sistema de ecuaciones lineales en su notación matricial:
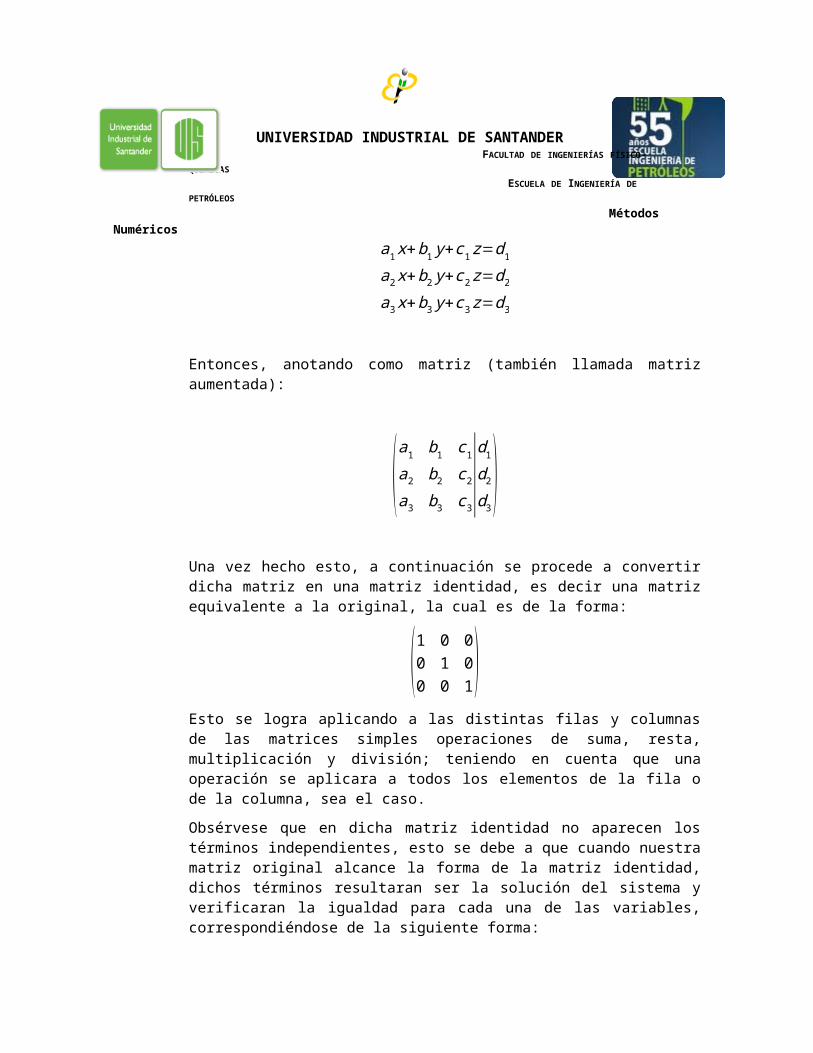
a1 x+b1 y+c1 z=d1a2 x+b2 y+c2 z=d2a3 x+b3 y+c3 z=d3
Entonces, anotando como matriz (también llamada matriz aumentada):
(a1 b1 c1a2 b2 c2a3 b3 c3
|d1d2d3)Una vez hecho esto, a continuación se procede a convertir dicha matriz en una matriz identidad, es decir una matriz equivalente a la original, la cual es de la forma:

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
(1 0 00 1 00 0 1)
Esto se logra aplicando a las distintas filas y columnas de las matrices simples operaciones de suma, resta, multiplicación y división; teniendo en cuenta que una operación se aplicara a todos los elementos de la fila o de la columna, sea el caso.
Obsérvese que en dicha matriz identidad no aparecen los términos independientes, esto se debe a que cuando nuestra matriz original alcance la forma de la matriz identidad, dichos términos resultaran ser la solución del sistema y verificaran la igualdad para cada una de las variables, correspondiéndose de la siguiente forma:
d1 = x
d2 = y
d3 = z
Ejemplo 8A continuación se muestra un breve ejemplo de solución de un sistema de ecuaciones mediante el método de Gauss-Jordan.
2x1 + 3x2 + 4x3 = 64x1 + 5x2 + 10x3 = 16
4x1 + 8x2 + 2x3 = 2
Solución
(2 3 44 5 104 8 2
⋮6162 )F1=F1/2→ (1 3/2 2
4 5 104 8 2
⋮3162 )F2=F2−4 F1F3=F3−4 F1
→
(1 3/2 20 −1 20 2 −6
⋮34
−10)
F2=−F2→ (1 3 /2 2
0 1 −20 2 −6
⋮3
−4−10)F1=F1−3 F2/2F3=F3−2F2
→
(1 0 50 1 −20 0 −2
⋮9
−4−2)F3=−F3/2
→ (1 0 50 1 −20 0 1
⋮9
−41 )

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
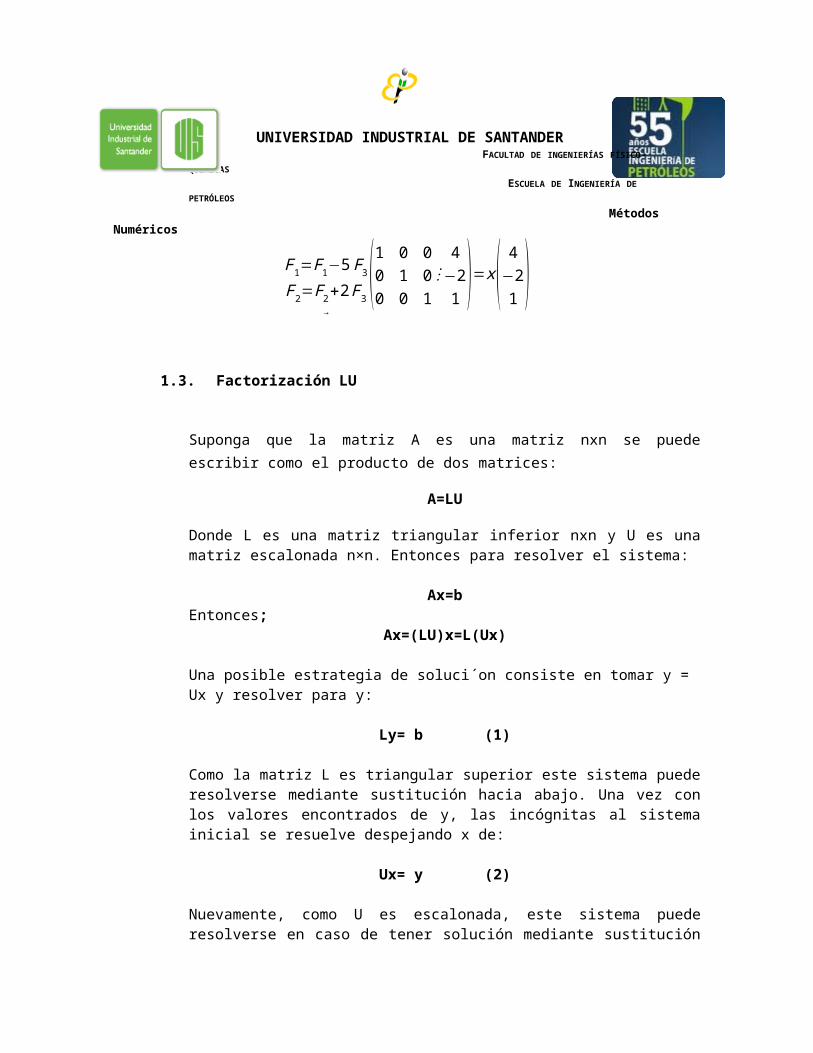
F1=F1−5 F3F2=F2+2 F3
→
(1 0 00 1 00 0 1
⋮4
−21 )=x ( 4−21 )
1.3. Factorización LU
Suponga que la matriz A es una matriz nxn se puede escribir como el producto de dos matrices:
A=LU
Donde L es una matriz triangular inferior nxn y U es una matriz escalonada n×n. Entonces para resolver el sistema:
Ax=bEntonces;
Ax=(LU)x=L(Ux)
Una posible estrategia de soluci´on consiste en tomar y = Ux y resolver para y:
Ly= b (1)
Como la matriz L es triangular superior este sistema puede resolverse mediante sustitución hacia abajo. Una vez con los valores encontrados de y, las incógnitas al sistema inicial se resuelve despejando x de:
Ux= y (2)
Nuevamente, como U es escalonada, este sistema puede resolverse en caso de tener solución mediante sustitución hacia atrás, lo cual es sencillo. Estas observaciones nos dan la pauta para ver la conveniencia de una factorización como la anterior, es decir factorizar A como el producto de una matriz L triangular superior, por otra U la cual es escalonada.
Ejemplo 9
Resolver el sistema de ecuaciones propuesto en el ejemplo 8 mediante la factorización LU:
2x1 + 3x2 + 4x3 = 64x1 + 5x2 + 10x3 = 16
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos4x1 + 8x2 + 2x3 = 2
Cuya matriz de coeficientes es:
A=(2 3 44 5 104 8 2 )=LU
El vector de soluciones es:
b=( 6162 )Para hallar la matriz U convertimos la triangular inferior de la matriz A en ceros; para ello utilizamos Gauss; simultáneamente calculamos L, tomando la matriz identidad y ubicando el opuesto del número por el cual multiplicamos en la transformación de U debajo de la diagonal principal de L, como se muestra a continuación:
U=F2=F2−2 F1F3=F3−2 F1
→
(2 3 40 −1 20 2 −6)F3=F3+2 F2→ (2 3 4
0 −1 20 0 −2)
L=(1 0 0¿ 1 0¿ ¿ 1)→(1 0 0
2 1 02 ¿ 1)→(1 0 0
2 1 02 −2 1)
Una vez hecha la factorización de la matriz se procede a hallar la solución del sistema empleando la ecuación (1)

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
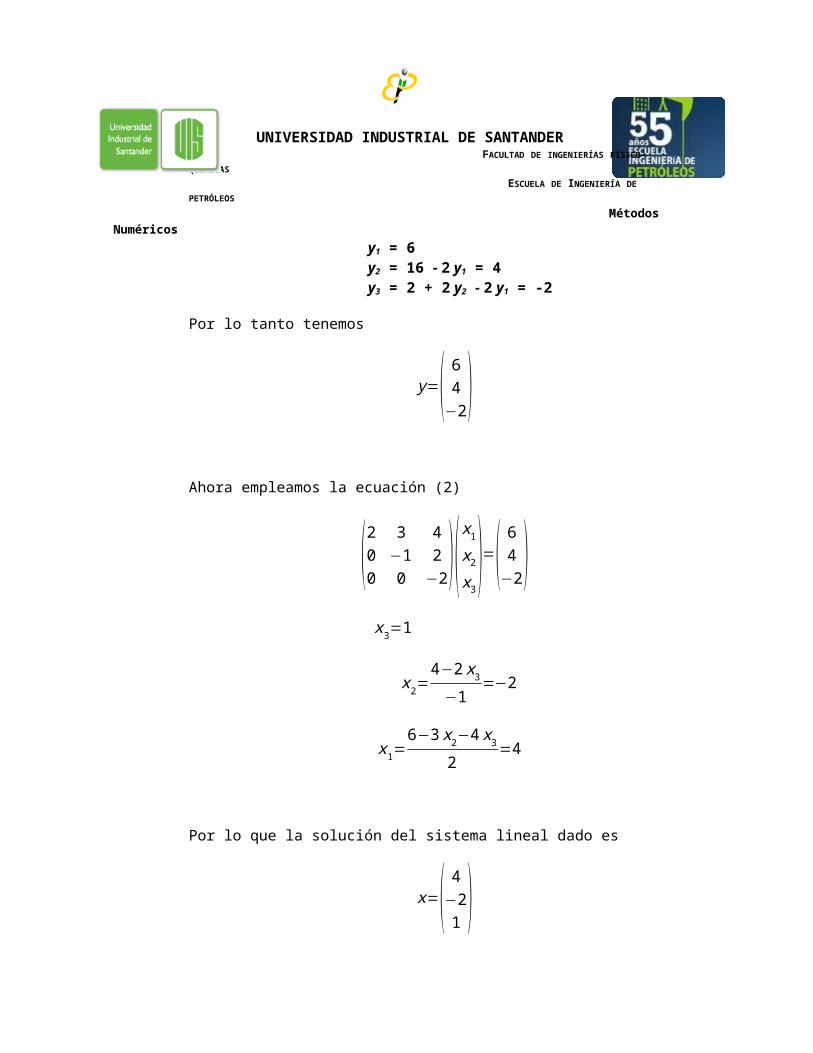
(1 0 02 1 02 −2 1)(
y1y2y3
)=( 6162 )y1 = 6y2 = 16 - 2 y1 = 4y3 = 2 + 2 y2 - 2 y1 = -2
Por lo tanto tenemos
y=( 64−2)Ahora empleamos la ecuación (2)
(2 3 40 −1 20 0 −2)(
x1x2x3
)=( 64−2)x3=1
x2=4−2 x3−1
=−2
x1=6−3 x2−4 x3
2=4
Por lo que la solución del sistema lineal dado es
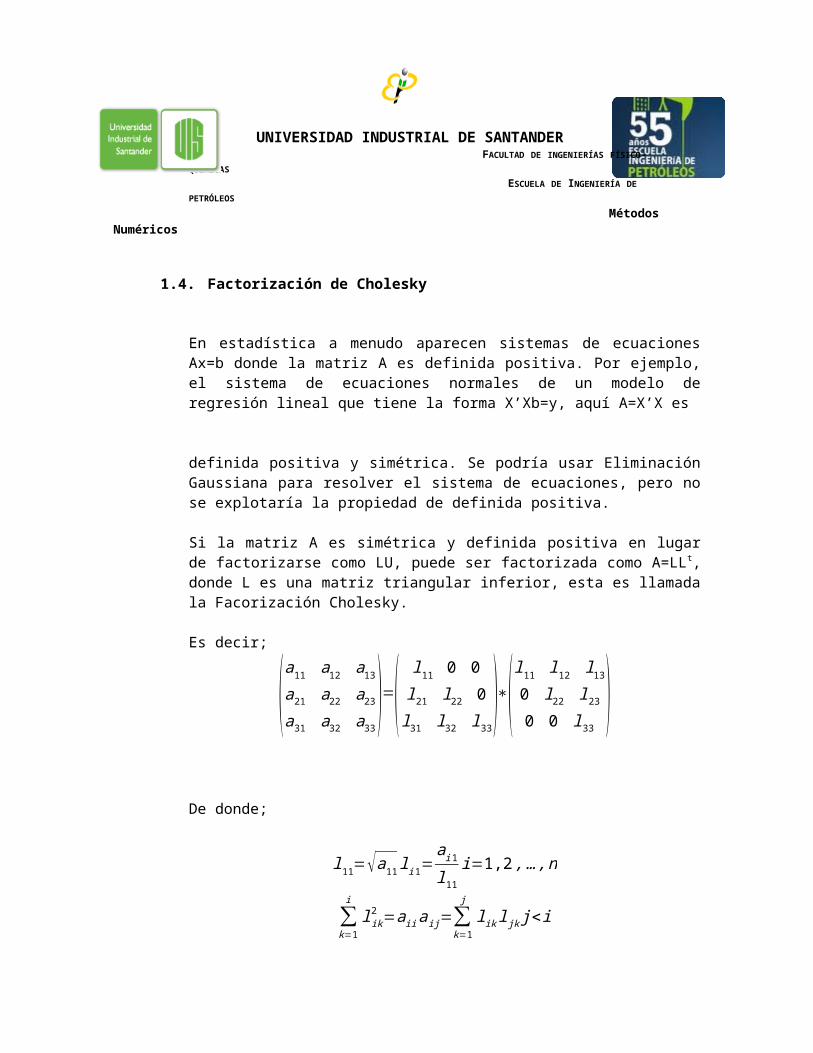
x=( 4−21 )1.4. Factorización de Cholesky
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos NuméricosEn estadística a menudo aparecen sistemas de ecuaciones Ax=b donde la matriz A es definida positiva. Por ejemplo, el sistema de ecuaciones normales de un modelo de regresión lineal que tiene la forma X’Xb=y, aquí A=X’X es
definida positiva y simétrica. Se podría usar Eliminación Gaussiana para resolver el sistema de ecuaciones, pero no se explotaría la propiedad de definida positiva.
Si la matriz A es simétrica y definida positiva en lugar de factorizarse como LU, puede ser factorizada como A=LLt, donde L es una matriz triangular inferior, esta es llamada la Facorización Cholesky.
Es decir;
(a11 a12 a13a21 a22 a23a31 a32 a33
)=( l11 0 0l21 l22 0l31 l32 l33
)∗(l11 l12 l130 l22 l230 0 l33
)De donde;
l11=√a11 li1=a i1l11i=1,2,…,n
∑k=1
i
lik2=aii aij=∑
k=1
j
lik l jk j<i
Ejemplo 10
Solucionar el siguiente sistema de ecuaciones mediante la factorización de Cholesky.
(4 2 2 42 5 7 024701911
1125
)(x1x2x3x4
)=(−115/21/ 4
)Solución:
A=(4 2 2 42 5 7 024701911
1125
)

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
Cálculo de la primera fila
l11=√4=2
Cálculo de la segunda fila
l21=a21l11
=22=1
l22=√a22−l212 =√5−1=2
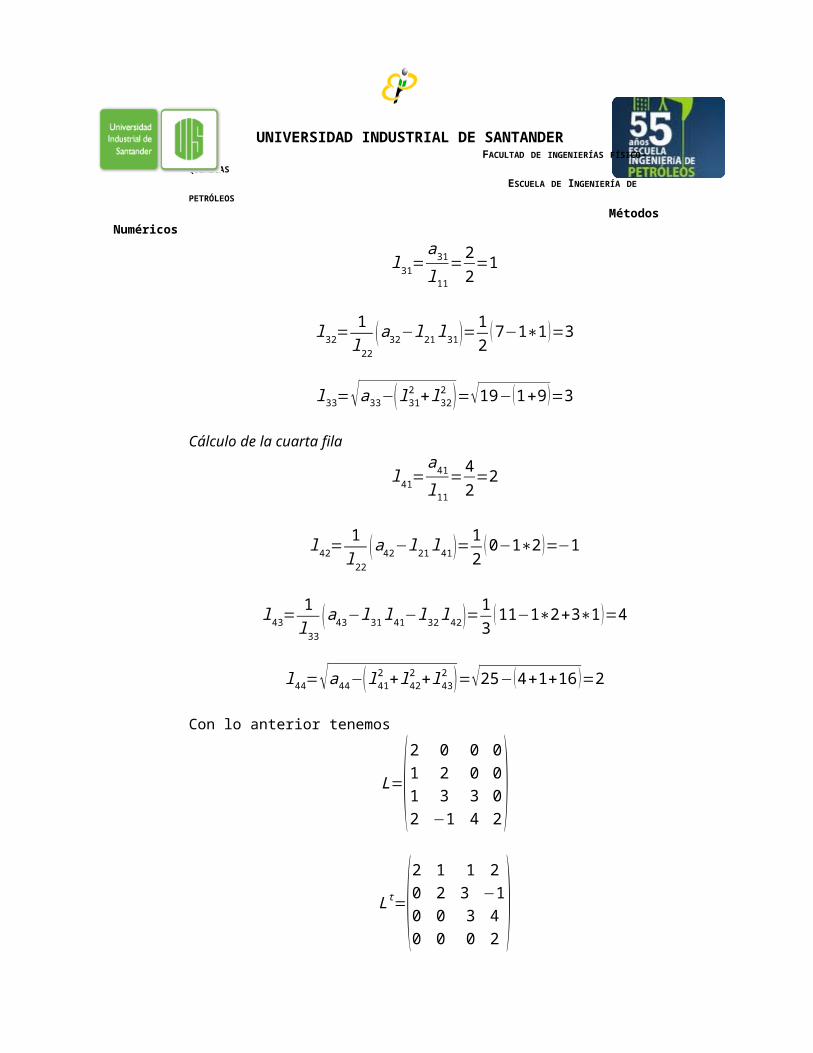
Cálculo de la tercera fila
l31=a31l11
=22=1
l32=1l22
(a32−l21 l31)=12
(7−1∗1 )=3
l33=√a33−( l312 +l322 )=√19−(1+9 )=3
Cálculo de la cuarta fila
l41=a41l11
=42=2
l42=1l22
(a42−l21 l 41)=12
(0−1∗2 )=−1
l43=1l33
(a43−l31 l41−l32 l42 )=13
(11−1∗2+3∗1 )=4
l44=√a44−( l412 +l 422 +l43
2 )=√25−(4+1+16 )=2
Con lo anterior tenemos
L=(2 0 0 01 2 0 012
3−1
3402)
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
Lt=(2 1 1 20 2 3 −10000
3042
)A continuación se soluciona el sistema mediante la factorización LU, teniendo en cuenta que A=LLt y se obtiene:
x=(−13/167/8
−1/41/4
)1.5. Metodo de Thomas
Un caso extremo de matrices banda es el de las matrices tridiagonales, que es una matriz con ancho de banda de 3; este sistema puede ser expresado de la forma:
A=(b1 c1 0 0a2 ⋱ ⋱ 0
00
⋱0
⋱an
cn−1bn
)Las matrices tridiagonales pueden factorizarse LU sin necesidad de pivoteo y este procedimiento resulta estable respecto a la propagación de errores de redondeo:
A=(1 0 … 0α200
⋱⋱0
0 ⋮⋱ 0α n 1
)(β1 γ1 0 0
0⋮0
⋱⋱…
⋱ 0⋱ γn−10 β2
)

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos NuméricosDe lo anterior se deduce que:
α n=an/βn−1βn=¿bn−α nγ n−1¿
γi=c i
Una vez factorizada la matriz se resuelve el sistema de ecuaciones como se hace una vez se obtiene la factorización LU.
2. METODOS ITERATIVOS
2.1. Método de Jacobi
El método Jacobi es el método iterativo para resolver sistemas de ecuaciones lineales más simple y se aplica solo a sistemas cuadrados, es decir a sistemas con tantas incógnitas como ecuaciones.
Primero se determina la ecuación de recurrencia. Para ello se ordenan las ecuaciones y las incógnitas. De la ecuación i se despeja la incógnita i. En notación matricial se escribirse como:
x = c + Bx (1)
donde x es el vector de incógnitas.
Se toma una aproximación para las soluciones y a esta se le designa por xo
Se itera en el ciclo que cambia la aproximación
Xi+1 = c + Bxi (2)
Ejemplo 11
Partiendo de (x = 1, y = 2) aplique dos iteraciones del método de Jacobi para resolver el sistema:

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos5 x+2 y=1x−4 y=0
Solución
Debemos primeramente despejar de la ecuación la incógnita correspondiente.
x = 0.20 + 0.00 x − 0.40 yy = 0.00 + 0.25 x + 0.00 y
Aplicamos la primera iteración partiendo de x0 = 1.00 y y0 = 2.00:
x1 = 0.20 + 0.00 (1.00) − 0.40 (2.00) = −0.60y1 = 0.00 + 0.25 (1.00) + 0.00 (2.00) = 0.25
Aplicamos la segunda iteración partiendo de x1 = −0.60 y y1 = 0.25:
x2 = 0.20 + 0.00 (−0.60) − 0.40 (0.25) = 0.10y2 = 0.00 + 0.25 (−0.60) + 0.00 (0.25) = −0.15
Aplicamos la siguiente iteración partiendo de x2 = 0.10 y y1 = −0.15:
x3 = 0.20 + 0.00 (0.10) − 0.40 (−0.15) = 0.26y3 = 0.00 + 0.25 (0.10) + 0.00 (−0.15) = 0.025
Aplicamos la siguiente iteración partiendo de x3 = 0.26 y y3 = 0.025:
x4 = 0.20 + 0.00 (0.26) − 0.40 (0.025) = 0.190y4 = 0.00 + 0.25 (0.26) + 0.00 (0.025) = 0.065
Aplicamos la siguiente iteración partiendo de x4 = 0.190 y y4 = 0.065:
x5 = 0.20 + 0.00 (0.19) − 0.40 (0.065) = 0.174y5 = 0.00 + 0.25 (0.19) + 0.00 (0.065) = 0.0475
Aplicamos la siguiente iteración partiendo de x5 = 0.174 y y5 = 0.0475:
x6 = 0.20 + 0.00 (0.174) − 0.40 (0.0475) = 0.181y6 = 0.00 + 0.25 (0.174) + 0.00 (0.0475) = 0.0435
x=0.181y=0.0435
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos2.2. Método Gauss Seidel
Este es uno de los métodos más interesantes del análisis numérico y particularmente útil ya que nos permite encontrar la solución de un sistema de “n” ecuaciones con “n” incógnitas.
Para comenzar es preciso mencionar que es un método iterativo, es decir que debe aplicarse recursivamente hasta encontrar una solución adecuada o con un error considerablemente pequeño.
En cada iteración obtenemos una solución posible del sistema con un error determinado, a medida que aplicamos nuevamente el método, la solución puede ser más precisa, entonces se dice que el sistema converge, pero si al aplicar el método reiteradas veces la solución tiene un error (ya explicaremos como se calcula este error) cada vez mayor se dice que el sistema no converge y no se puede resolver el sistema de ecuaciones por este método.
Bien proseguiré con la explicación del método y luego aclararé los detalles necesarios para determinar la eficacia del mismo.
Teniendo el siguiente sistema de ecuaciones:
Despejamos x1 de la ecuación 1, x2 de la ecuación 2,…, xn de la ecuación n, quedando:
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos NuméricosDesde la formula anterior resultan las fórmulas que se deberán ir aplicando en las diferentes iteraciones. Para comenzar a aplicar el método debemos asignar un valor arbitrario a las variables x2,…xn con el fin de obtener x1. Lo más conveniente en este caso es que los valores comiencen en cero, lo cual nos facilitaría el trabajo ya que se reduce el cálculo de las primeras soluciones, entonces de esto resulta que:
Ahora despejamos x2 de la ecuación 2 y reemplazamos a x1 por el valor obtenido en la ecuación anterior. De esto nos queda:
Una vez que tenemos x2, despejamos x3 de la ecuación 3 y así sucesivamente con las n ecuaciones, cada vez asignando el valor de las x1, x2,… xn-1 obtenido en el paso anterior.
Cuando hemos despejado las xn, tenemos lo que se conoce como primera solución o solución de la primera iteración:
Con los nuevos valores de x1, x2,…,xn aplicamos los mismos pasos anteriores pero con los nuevos valores de las xn, de esta manera conseguimos una segunda solución:

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
Al tener esta segunda solución estamos en condiciones de calcular el error que se calcula como sigue:
Así, repetimos el método tantas veces hasta que el error sea muy pequeño o los suficientemente aceptable.
Ahora solo queda mencionar que para que un sistema sea convergente se debe cumplir que la matriz de coeficientes sea diagonalmente dominante, y para ello se debe verificar la siguiente expresión:
Si no se cumple esa condición, se puede permutar las filas de la matriz, con el fin de poder convertirla en una diagonalmente dominante.
Ejemplo 12
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos
Usar el método de Gauss-Seidel para aproximar la solución del sistema propuesto en el ejemplo 10:
5 x+2 y=1x−4 y=0
SoluciónDebemos en primer lugar despejar de la ecuación la incógnita correspondiente.
x = 0.20 + 0.00 x − 0.40 yy = 0.00 + 0.25 x + 0.00 y
Aplicamos la primera iteración partiendo de x0 = 1.00 y y0 = 2.00:
x1 = 0.20 + 0.00 (+1.000) − 0.40 (2.00) = −0.600y1 = 0.00 + 0.25 (−0.600) + 0.00 (2.00) = −0.15
Aplicamos la segunda iteración partiendo de x1 = −0.600 y y1 = −0.15:
x2 = 0.20 + 0.00 (−0.600) − 0.40 (−0.15) = 0.26y2 = 0.00 + 0.25 (0.26) + 0.00 (−0.15) = 0.065
Aplicamos la tercera iteración partiendo de x2 = 0.26 y y2 = 0.065:
x2 = 0.20 + 0.00 (0.26) − 0.40 (0.065) = 0.174y2 = 0.00 + 0.25 (0.174) + 0.00 (0.174) = 0.0435
x=0.174y=0.0435
Como se puede observar con el método de Gauss Seidel se redujeron el número de iteraciones con respecto al método de Jacobi.
FUENTES
http://personal.redestb.es/ztt/tem/t6_matrices.htm

UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FÍSICO-QUÍMICAS
ESCUELA DE INGENIERÍA DE PETRÓLEOS
Métodos Numéricos http://www.ditutor.com/matrices/suma_matrices.html http://www.monografias.com/trabajos72/resolucion-sistemas-
metodo-gauss-jordan/resolucion-sistemas-metodo-gauss-jordan.shtml http://www.geronet.com.ar/?p=6 http://www.sectormatematica.cl/media/NM3/DETERMINANTES.doc http://www.fain.uncoma.edu.ar/catedraMetodos/teoria/MC2_Cap1.doc