Embed Size (px)
Citation preview
1
Metody optymalizacji w zarządzaniu
Joanna JózefowskaInstytut Informatyki Wydział Informatyki i ZarządzaniaPolitechnika Poznańska
Konsultacje: Środa 11.30-13.00 p. 436WE
Metody optymalizacji w zarządzaniuWykład (30 godzin) – poniedziałek 11.45 s. 13 Materiały do wykładu: – http://www.cs.put.poznan.pl/jjozefowska/– hasło: w2005
Laboratorium (30 godzin) – mgr inż. Łukasz JózefowskiSzacowany czas pracy poza zajęciami: 120 godzinZaliczenie: na podstawie zadań zrealizowanych w ramach laboratoriumObecność na laboratoriach jest obowiązkowa, na wykładach będzie sprawdzana.Egzamin: – ustny– po każdym wykładzie podam 2-3 pytania egzaminacyjne– termin wg harmonogramu sesji
Zakres wykładu
Modele szeregowania zadań na jednym procesorze z kryterium minimalizacji odchylenia od idealnej proporcjiModele i algorytmy szeregowania zadań na jednym procesorze z kryterium minimalizacji kosztów wykonania zadania przed i po żądanym terminie:– wspólny dla wszystkich zadań żądany termin
wykonania,– żądane terminy wykonania zależne od zadań.
Należy powtórzyć:
sformułowanie problemu optymalizacyjnego,problemy szeregowania zadań,złożoność obliczeniowa algorytmów,metoda programowania dynamicznego,metoda podziału i ograniczeń,metody rozwiązywania problemu transportowego (np. algorytm węgierski).
Literatura
1. Bagchi U., Sullivan R. S., Chang V.-L., Minimizing mean squared deviation of completion times about a common due date, Management Science, 33, 1987, 894-906.
2. Baker K. R., Scudder G. D., Sequencing with earliness and tardiness penalties: a review, Operations Research, 38, 1990, 22-36.
3. Balinski, M., Young, H. (1982). Fair Representation. Meeting the Ideal of One Man, One Vote, Yale University Press.
4. Bauman J., Józefowska J., Minimizing the earliness-tardiness costs on a single machine, Computers and Operations Research, 2006.
5. Bautista, J., Companys, R., Corominas, A. (1996). A Note on the Relation between the Product Rate Variation (PRV) Problem and theApportionment Problem. Journal of the Operational Research Society 47, 1410–1414.
6. De P., Ghosh J. B., Wells C. E., Solving a generalized model for CON due date assignment and sequencing, International Journal of Production Economics, 34, 1994, 179-185.
7. Dileepan P., Common due date scheduling problem with separate earliness and tardiness penalties, Computers and Operations Research 20, 1993, 179-181.
Literatura
8. Hall N. G., Kubiak W., Sethi S. P., Earliness-tardiness scheduling problems, II: deviation of completion times about a restrictive common due-date, Operations Research, 39, 1991, 847-856.
9. Józefowska J., Just-in-time scheduling. Models and algorithms for computer and manufacturin systems, Springer 2007.
10. Józefowska J., Muras M., Exact and heuristic approaches to single machine earliness-tardiness scheduling, Proc. 6th Internat. Conf. on Industrial Engineering and Production Management, vol. 3, Porto 2003, 285-294.
11. Józefowska J., Muras M., Just-in Time scheduling of unweighted jobswith unit processing times and two common due dates, Math. Mod. for Automation and Control, Kaszyński (Ed.), 2005.
12. Jurisch B., Kubiak W., Józefowska J., Algorithms for MinCliquescheduling problems, Discrete Applied Mathematics, 72, 1997, 115-139.
13. Kanet J. J., Minimizing the average deviation of job completion timesabout a common due date, Naval Research Logistics Quarterly, 28,1981, 643-651.
14. Kubiak W., New results on the completion time variance minimization, Discrete Applied Mathematics, 58, 1995, 157-168.

2
Literatura15. Kubiak, W., Sethi, S. (1994). Optimal level schedules for flexible
assembly lines in JIT production systems. International Journal of Flexible Manufacturing Systems 6, 137–154.
16. Miltenburg, J. (1989). Level schedules for mixed-model assembly lines injust-in-time production systems. Management Science 35, 192–207.
17. Panwalkar S.S., Rajagopalan R., Single machine sequencing with controllable processing times, EJOR 59, 1992, 298-302.
18. Panwalkar S.S., Smith M., Seidmann A., Common due date assignment to minimize total penalty for the one machine scheduling problem, Operations Research, 30, 1982, 391-399.
19. Steiner, G., Yeomans, S. (1993). Level Schedules for Mixed-model, Just-in-Time Processes. Management Science 39, 728–735.
20. Still, J.W. (1979). A class of new methods for Congressional Apportionment. SIAM Journal on Applied Mathematics 37, 401–418.
21. Tijdeman, R. (1980). The chairman assignment problem. Discrete Mathematics 32, 323–330.
22. Ventura J. A., Weng M. X., An improved dynamic programming algorithm for the single machine mean absolute deviation problem with a restrictive common due date. Operations Research Letters, 17, 1995, 149-152.
Sprawiedliwy podział
Wykład 1
Plan wykładu
Definicja problemu podziału miejsc w parlamencieKryteria sprawiedliwego podziałuMetody sprawiedliwego podziału– Metoda Hamiltona– Metody dzielnikowe– Metoda kwotowa Balinskiego i Younga– Metoda Stilla
Własności metod sprawiedliwego podziału
Sformułowanie problemu
1
ii s
ii
pq hp
=
=
∑Idealny podział:
(kwota)
s
p = [p1, ..., ps]
h
r = [r1, .., rs]
liczba stanów
wektor populacji
rozmiar parlamentu
minimalny przydział miejsc
Przykład 1
s = 6
p = [27744, 25178, 19951, 14610, 9225, 3292]
h = 36
q = [9,988; 9,064; 7,182; 5,260; 1,321; 1,185]
r = 0
Jak optymalnie przydzielić miejsca w parlamencie (zasoby)?
a = [10, 9, 7, 5, 1, 1] h = 33
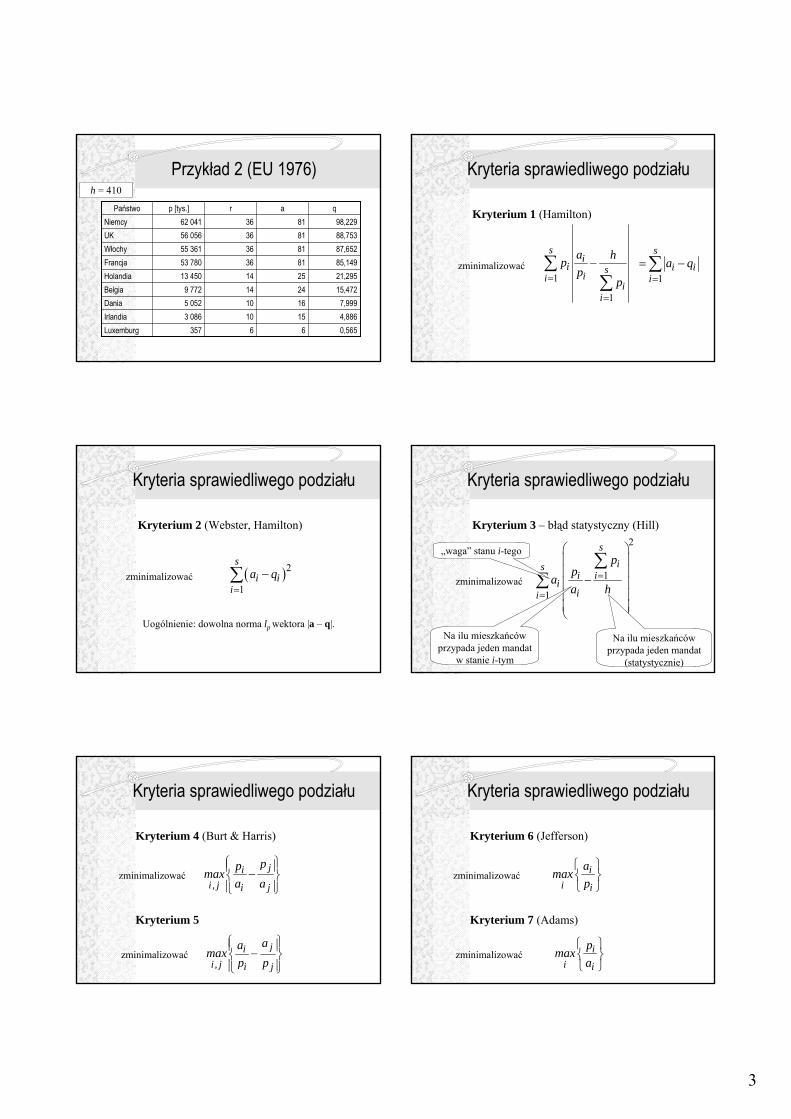
Przykład 2 (EU 1976)
66357Luxemburg15103 086Irlandia16105 052Dania24149 772Belgia251413 450Holandia813653 780Francja813655 361Włochy813656 056UK813662 041Niemcy
arp [tys.]Państwo
h = 410
3
Przykład 2 (EU 1976)
0,56566357Luxemburg4,88615103 086Irlandia7,99916105 052Dania
15,47224149 772Belgia21,295251413 450Holandia85,149813653 780Francja87,652813655 361Włochy88,753813656 056UK98,229813662 041Niemcy
qarp [tys.]Państwo
h = 410
Kryteria sprawiedliwego podziału
1
1
si
i siii
i
a hpp
p=
=
−∑∑ 1
si i
ia q
== −∑
Kryterium 1 (Hamilton)
zminimalizować
Kryteria sprawiedliwego podziału
( )21
si i
ia q
=−∑
Kryterium 2 (Webster, Hamilton)
Uogólnienie: dowolna norma lp wektora |a – q|.
zminimalizować
Kryteria sprawiedliwego podziału
2
1
1
sis
i ii
ii
ppaa h
=
=
⎛ ⎞⎜ ⎟⎜ ⎟−⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
∑∑
Kryterium 3 – błąd statystyczny (Hill)
zminimalizować
Na ilu mieszkańców przypada jeden mandat
(statystycznie)
Na ilu mieszkańców przypada jeden mandat
w stanie i-tym
„waga” stanu i-tego
Kryteria sprawiedliwego podziału
jii , j i j
ppmaxa a
⎧ ⎫⎪ ⎪−⎨ ⎬⎪ ⎪⎩ ⎭
Kryterium 4 (Burt & Harris)
zminimalizować
jii , j i j
aamaxp p
⎧ ⎫⎪ ⎪−⎨ ⎬⎪ ⎪⎩ ⎭
zminimalizować
Kryterium 5
Kryteria sprawiedliwego podziału
ii i
amaxp
⎧ ⎫⎨ ⎬⎩ ⎭
Kryterium 6 (Jefferson)
zminimalizować
ii i
pmaxa
⎧ ⎫⎨ ⎬⎩ ⎭
zminimalizować
Kryterium 7 (Adams)
4
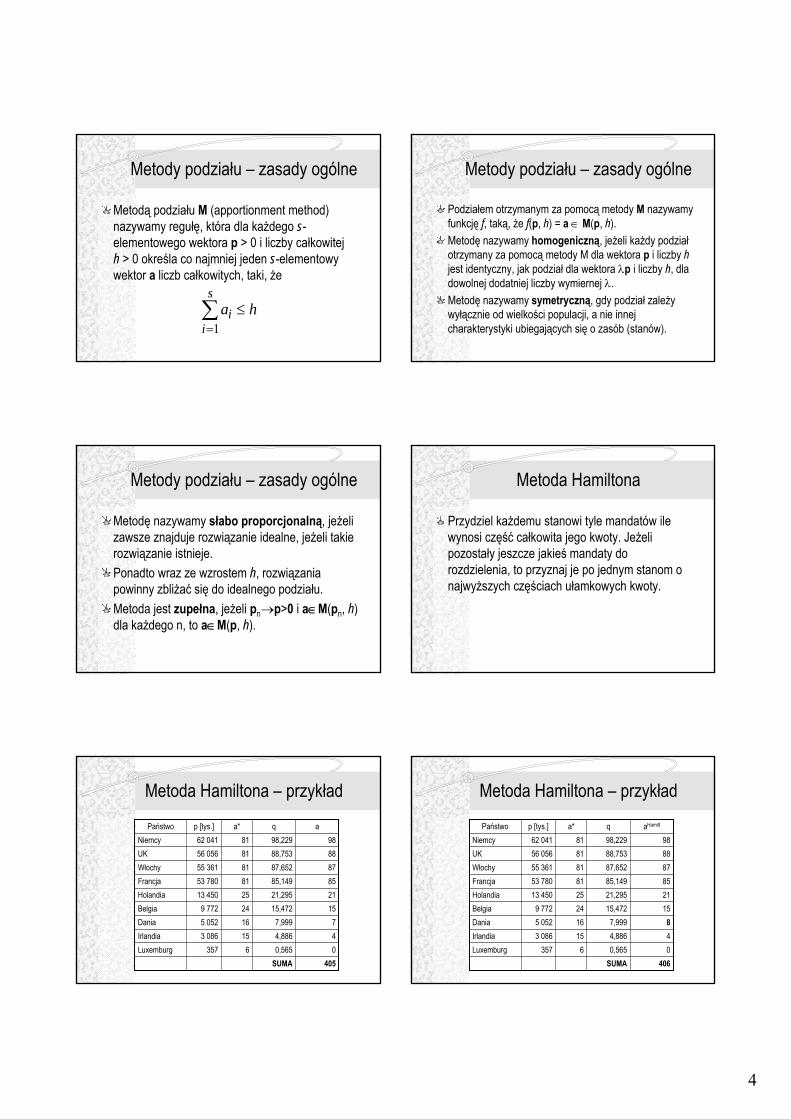
Metody podziału – zasady ogólne
Metodą podziału M (apportionment method) nazywamy regułę, która dla każdego s-elementowego wektora p > 0 i liczby całkowitej h > 0 określa co najmniej jeden s-elementowy wektor a liczb całkowitych, taki, że
1
si
ia h
=≤∑
Metody podziału – zasady ogólne
Podziałem otrzymanym za pomocą metody M nazywamy funkcję f, taką, że f(p, h) = a ∈ M(p, h).Metodę nazywamy homogeniczną, jeżeli każdy podziałotrzymany za pomocą metody M dla wektora p i liczby hjest identyczny, jak podział dla wektora λp i liczby h, dla dowolnej dodatniej liczby wymiernej λ. Metodę nazywamy symetryczną, gdy podział zależy wyłącznie od wielkości populacji, a nie innej charakterystyki ubiegających się o zasób (stanów).
Metody podziału – zasady ogólne
Metodę nazywamy słabo proporcjonalną, jeżeli zawsze znajduje rozwiązanie idealne, jeżeli takie rozwiązanie istnieje. Ponadto wraz ze wzrostem h, rozwiązania powinny zbliżać się do idealnego podziału.Metoda jest zupełna, jeżeli pn→p>0 i a∈M(pn, h) dla każdego n, to a∈M(p, h).
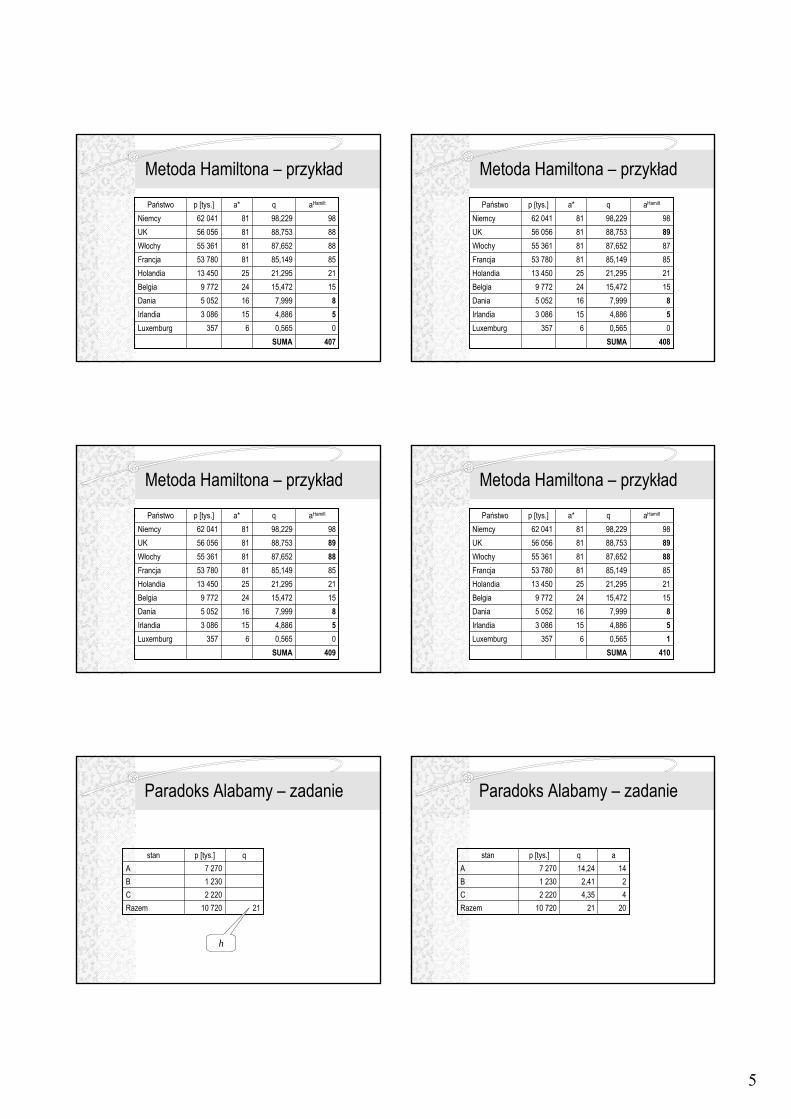
Metoda Hamiltona
Przydziel każdemu stanowi tyle mandatów ile wynosi część całkowita jego kwoty. Jeżeli pozostały jeszcze jakieś mandaty do rozdzielenia, to przyznaj je po jednym stanom o najwyższych częściach ułamkowych kwoty.
Metoda Hamiltona – przykład
00,5656357LuxemburgSUMA
4,8867,999
15,47221,29585,14987,65288,75398,229q
405
4153 086Irlandia7165 052Dania
15249 772Belgia212513 450Holandia858153 780Francja878155 361Włochy888156 056UK988162 041Niemcy
aa*p [tys.]Państwo
Metoda Hamiltona – przykład
00,5656357LuxemburgSUMA
4,8867,999
15,47221,29585,14987,65288,75398,229q
406
4153 086Irlandia8165 052Dania
15249 772Belgia212513 450Holandia858153 780Francja878155 361Włochy888156 056UK988162 041Niemcy
aHamilta*p [tys.]Państwo
5
Metoda Hamiltona – przykład
00,5656357LuxemburgSUMA
4,8867,999
15,47221,29585,14987,65288,75398,229q
407
5153 086Irlandia8165 052Dania
15249 772Belgia212513 450Holandia858153 780Francja888155 361Włochy888156 056UK988162 041Niemcy
aHamilta*p [tys.]Państwo
Metoda Hamiltona – przykład
00,5656357LuxemburgSUMA
4,8867,999
15,47221,29585,14987,65288,75398,229q
408
5153 086Irlandia8165 052Dania
15249 772Belgia212513 450Holandia858153 780Francja878155 361Włochy898156 056UK988162 041Niemcy
aHamilta*p [tys.]Państwo
Metoda Hamiltona – przykład
00,5656357LuxemburgSUMA
4,8867,999
15,47221,29585,14987,65288,75398,229q
409
5153 086Irlandia8165 052Dania
15249 772Belgia212513 450Holandia858153 780Francja888155 361Włochy898156 056UK988162 041Niemcy
aHamilta*p [tys.]Państwo
Metoda Hamiltona – przykład
10,5656357LuxemburgSUMA
4,8867,999
15,47221,29585,14987,65288,75398,229q
410
5153 086Irlandia8165 052Dania
15249 772Belgia212513 450Holandia858153 780Francja888155 361Włochy898156 056UK988162 041Niemcy
aHamilta*p [tys.]Państwo
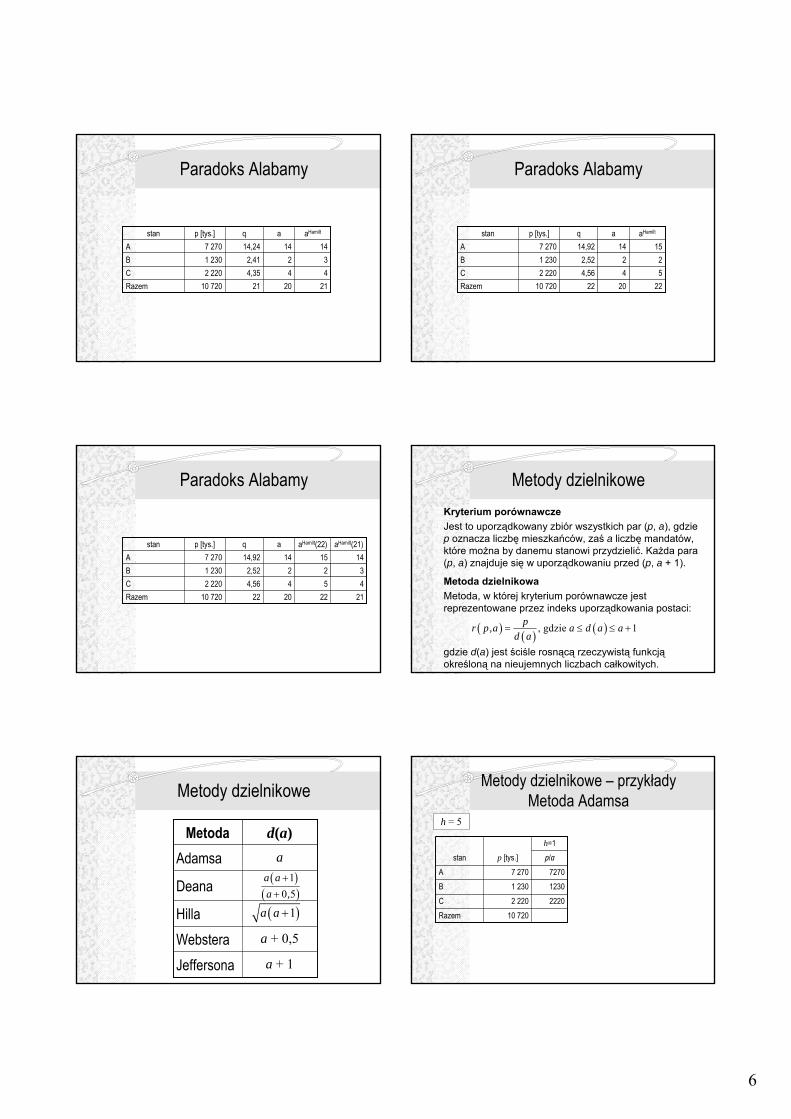
Paradoks Alabamy – zadanie
21
q
10 720Razem2 220C1 230B7 270A
p [tys.]stan
h
Paradoks Alabamy – zadanie
2042
14a
214,352,41
14,24q
10 720Razem2 220C1 230B7 270A
p [tys.]stan
6
Paradoks Alabamy
2143
14aHamilt
2042
14a
214,352,41
14,24q
10 720Razem2 220C1 230B7 270A
p [tys.]stan
Paradoks Alabamy
2252
15aHamilt
2042
14a
224,562,52
14,92q
10 720Razem2 220C1 230B7 270A
p [tys.]stan
Paradoks Alabamy
2252
15aHamilt(22)
2143
14aHamilt(21)
2042
14a
224,562,52
14,92q
10 720Razem2 220C1 230B7 270A
p [tys.]stan
Metody dzielnikoweKryterium porównawczeJest to uporządkowany zbiór wszystkich par (p, a), gdzie p oznacza liczbę mieszkańców, zaś a liczbę mandatów, które można by danemu stanowi przydzielić. Każda para (p, a) znajduje się w uporządkowaniu przed (p, a + 1).
Metoda dzielnikowaMetoda, w której kryterium porównawcze jest reprezentowane przez indeks uporządkowania postaci:
gdzie d(a) jest ściśle rosnącą rzeczywistą funkcjąokreśloną na nieujemnych liczbach całkowitych.
( ) ( ) ( ), gdzie 1pr p,a a d a ad a
= ≤ ≤ +
Metody dzielnikowe
a + 1
a + 0,5
a
d(a)
JeffersonaWebsteraHilla
Deana
AdamsaMetoda
( )( )
10 5
a aa ,
++
( )1a a +
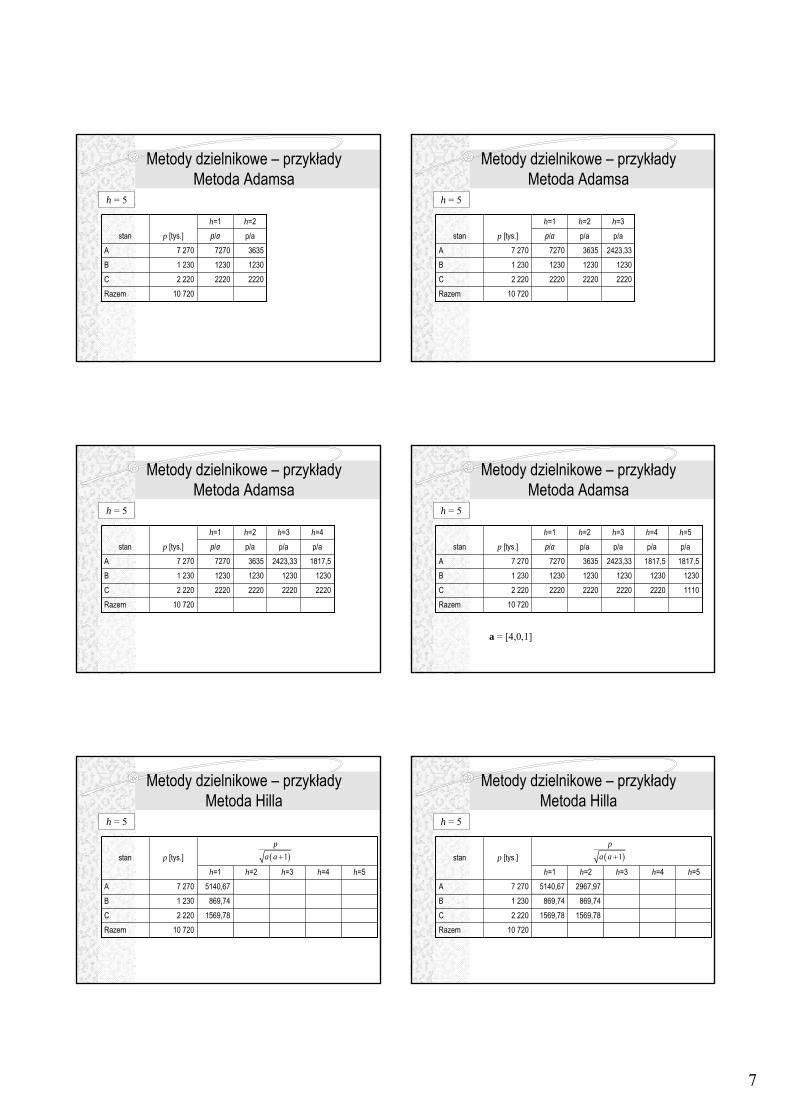
Metody dzielnikowe – przykładyMetoda Adamsa
h=1
222012307270
p/a
10 720Razem2 220C1 230B7 270A
p [tys.]stan
h = 5
7
Metody dzielnikowe – przykładyMetoda Adamsa
222012303635
p/ah=2h=1
222012307270
p/a
10 720Razem2 220C1 230B7 270A
p [tys.]stan
h = 5
Metody dzielnikowe – przykładyMetoda Adamsa
22201230
2423,33p/ah=3
222012303635
p/ah=2h=1
222012307270
p/a
10 720Razem2 220C1 230B7 270A
p [tys.]stan
h = 5
Metody dzielnikowe – przykładyMetoda Adamsa
22201230
2423,33p/ah=3
222012303635
p/ah=2
22201230
1817,5p/ah=4h=1
222012307270
p/a
10 720Razem2 220C1 230B7 270A
p [tys.]stan
h = 5
Metody dzielnikowe – przykładyMetoda Adamsa
22201230
2423,33p/ah=3
222012303635
p/ah=2
22201230
1817,5p/ah=4 h=5h=1
11101230
1817,5p/a
222012307270
p/a
10 720Razem2 220C1 230B7 270A
p [tys.]stan
h = 5
a = [4,0,1]
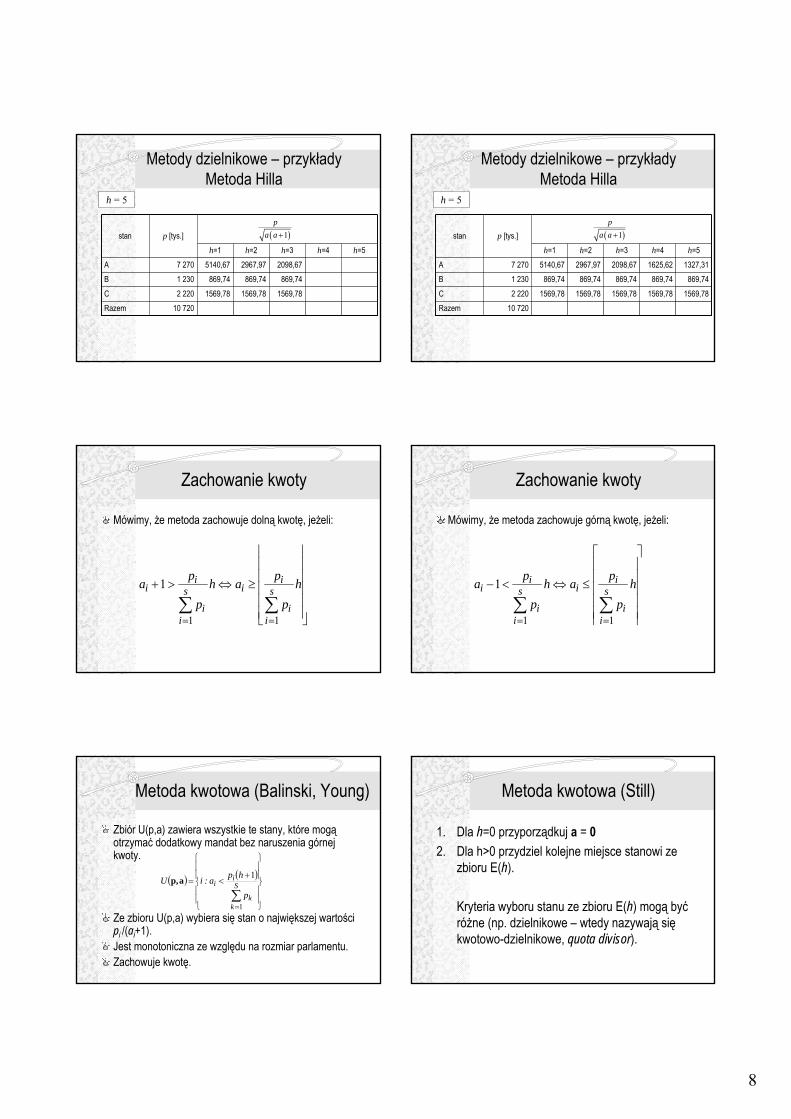
Metody dzielnikowe – przykładyMetoda Hilla
h=2 h=3 h=4
1569,78869,74
5140,67h=1 h=5
10 720Razem2 220C1 230B7 270A
p [tys.]stan
h = 5
( )1p
a a +
Metody dzielnikowe – przykładyMetoda Hilla
1569,78869,74
2967,97h=2 h=3 h=4
1569,78869,74
5140,67h=1 h=5
10 720Razem2 220C1 230B7 270A
p [tys.]stan
h = 5
( )1p
a a +
8
Metody dzielnikowe – przykładyMetoda Hilla
1569,78869,74
2967,97h=2
1569,78869,74
2098,67h=3 h=4
1569,78869,74
5140,67h=1 h=5
10 720Razem2 220C1 230B7 270A
p [tys.]stan
h = 5
( )1p
a a +
Metody dzielnikowe – przykładyMetoda Hilla
1569,78869,74
2967,97h=2
1569,78869,74
2098,67h=3
1569,78869,74
1625,62h=4
1569,78869,74
5140,67h=1 h=5
1569,78869,74
1327,31
10 720Razem2 220C1 230B7 270A
p [tys.]stan
h = 5
( )1p
a a +
Zachowanie kwoty
Mówimy, że metoda zachowuje dolną kwotę, jeżeli:
1 1
1 i ii is s
i ii i
p pa h a hp p
= =
⎢ ⎥⎢ ⎥⎢ ⎥+ > ⇔ ≥ ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
∑ ∑
Zachowanie kwoty
Mówimy, że metoda zachowuje górną kwotę, jeżeli:
1 1
1 i ii is s
i ii i
p pa h a hp p
= =
⎡ ⎤⎢ ⎥⎢ ⎥− < ⇔ ≤ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
∑ ∑
Metoda kwotowa (Balinski, Young)
Zbiór U(p,a) zawiera wszystkie te stany, które mogąotrzymać dodatkowy mandat bez naruszenia górnej kwoty.
Ze zbioru U(p,a) wybiera się stan o największej wartości pi /(ai+1).Jest monotoniczna ze względu na rozmiar parlamentu.Zachowuje kwotę.
( ) ( )
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
+<=
∑=
S
kk
ii
p
hpa:iU
1
1ap,
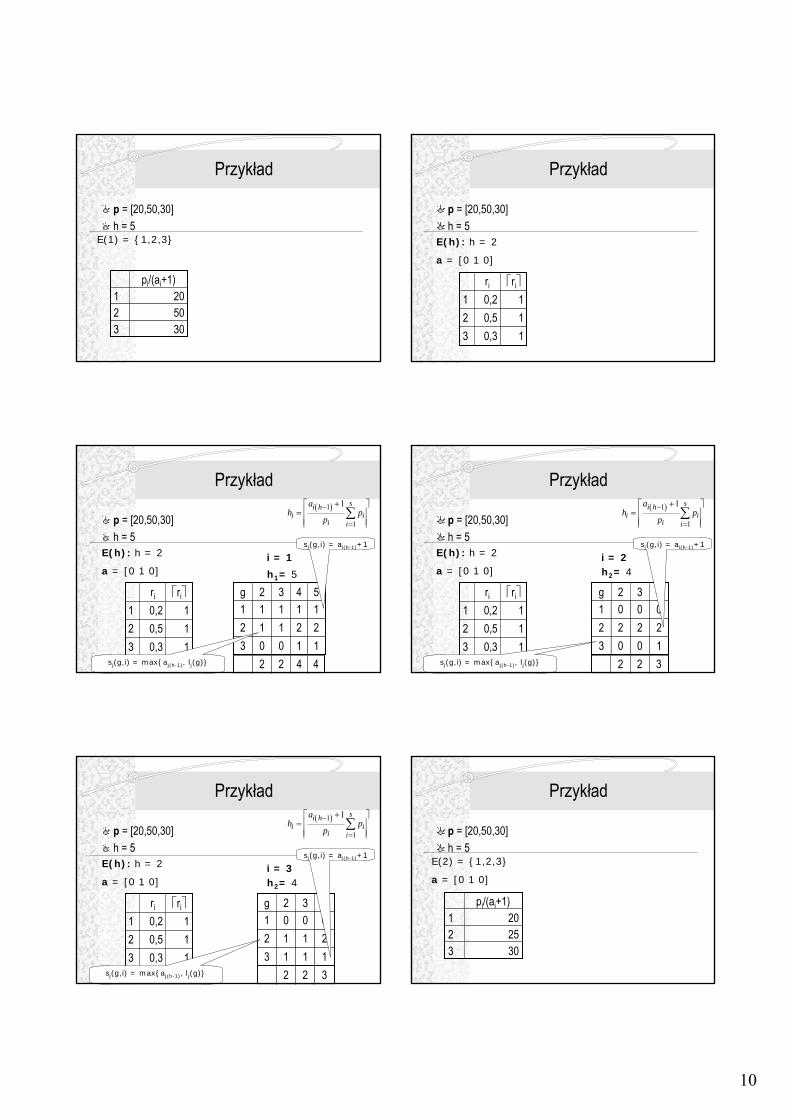
Metoda kwotowa (Still)
1. Dla h=0 przyporządkuj a = 02. Dla h>0 przydziel kolejne miejsce stanowi ze
zbioru E(h).
Kryteria wyboru stanu ze zbioru E(h) mogą byćróżne (np. dzielnikowe – wtedy nazywają siękwotowo-dzielnikowe, quota divisor).
9
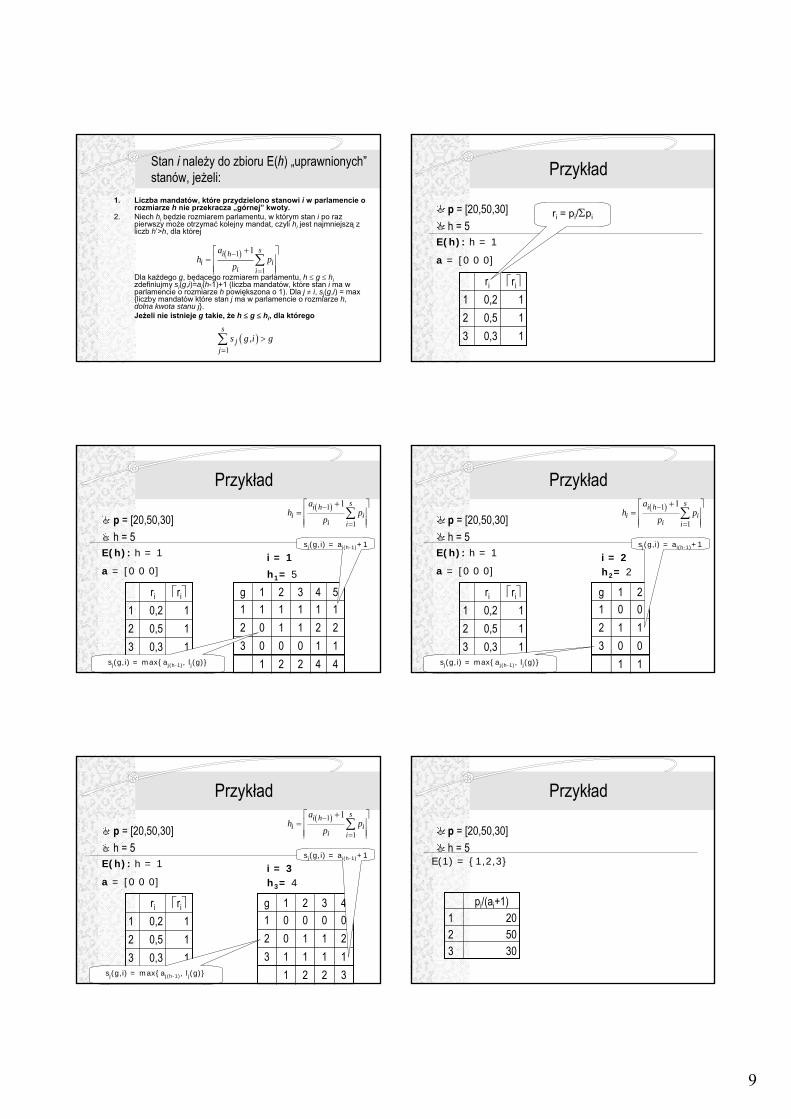
Stan i należy do zbioru E(h) „uprawnionych”stanów, jeżeli:
1. Liczba mandatów, które przydzielono stanowi i w parlamencie o rozmiarze h nie przekracza „górnej” kwoty.
2. Niech hi będzie rozmiarem parlamentu, w którym stan i po raz pierwszy może otrzymać kolejny mandat, czyli hi jest najmniejszą z liczb h’>h, dla której
Dla każdego g, będącego rozmiarem parlamentu, h ≤ g ≤ hizdefiniujmy si(g,i)=ai(h-1)+1 (liczba mandatów, które stan i ma w parlamencie o rozmiarze h powiększona o 1). Dla j ≠ i, sj(g,i) = max {liczby mandatów które stan j ma w parlamencie o rozmiarze h, dolna kwota stanu j}. Jeżeli nie istnieje g takie, że h ≤ g ≤ hi, dla którego
( )1
1
1 si hi i
i i
ah p
p−
=
+⎡ ⎤= ⎢ ⎥⎢ ⎥⎢ ⎥
∑
( )1
sj
js g ,i g
=>∑
Przykład
p = [20,50,30]h = 5
111
⎡ri⎤
0,330,520,21ri
E(h): h = 1
a = [0 0 0]
ri = pi/Σpi
Przykład
p = [20,50,30]h = 5
111
⎡ri⎤
0,330,520,21ri
1215
1214
000311021111321g
i = 1sj(g,i) = ai(h-1)+1
44221
E(h): h = 1
a = [0 0 0]
( )1
1
1 si hi i
i i
ah p
p−
=
+⎡ ⎤= ⎢ ⎥⎢ ⎥⎢ ⎥
∑
h1= 5
sj(g,i) = max{aj(h-1), lj(g)}
Przykład
p = [20,50,30]h = 5
111
⎡ri⎤
0,330,520,21ri
00311200121g
i = 2sj(g,i) = ai(h-1)+1
11
E(h): h = 1
a = [0 0 0]
( )1
1
1 si hi i
i i
ah p
p−
=
+⎡ ⎤= ⎢ ⎥⎢ ⎥⎢ ⎥
∑
h2= 2
sj(g,i) = max{aj(h-1), lj(g)}
Przykład
p = [20,50,30]h = 5
111
⎡ri⎤
0,330,520,21ri
1102
1103
11320200141g
i = 3sj(g,i) = ai(h-1)+1
2 2 31
E(h): h = 1
a = [0 0 0]
( )1
1
1 si hi i
i i
ah p
p−
=
+⎡ ⎤= ⎢ ⎥⎢ ⎥⎢ ⎥
∑
h3= 4
sj(g,i) = max{aj(h-1), lj(g)}
Przykład
p = [20,50,30]h = 5
E(1) = {1,2,3}
303502201
pi/(ai+1)
10
Przykład
p = [20,50,30]h = 5
E(1) = {1,2,3}
303502201
pi/(ai+1)
Przykład
p = [20,50,30]h = 5
111
⎡ri⎤
0,330,520,21ri
E(h): h = 2
a = [0 1 0]
Przykład
p = [20,50,30]h = 5
111
⎡ri⎤
0,330,520,21ri
1215
1214
00311211132g
i = 1sj(g,i) = ai(h-1)+1
4422
E(h): h = 2
a = [0 1 0]
( )1
1
1 si hi i
i i
ah p
p−
=
+⎡ ⎤= ⎢ ⎥⎢ ⎥⎢ ⎥
∑
h1= 5
sj(g,i) = max{aj(h-1), lj(g)}
Przykład
p = [20,50,30]h = 5
111
⎡ri⎤
0,330,520,21ri
1204
0203
0202
321g
i = 2sj(g,i) = ai(h-1)+1
2 2 3
E(h): h = 2
a = [0 1 0]
( )1
1
1 si hi i
i i
ah p
p−
=
+⎡ ⎤= ⎢ ⎥⎢ ⎥⎢ ⎥
∑
h2= 4
sj(g,i) = max{aj(h-1), lj(g)}
Przykład
p = [20,50,30]h = 5
111
⎡ri⎤
0,330,520,21ri
1102
1103
1322014g
i = 3sj(g,i) = ai(h-1)+1
2 32
E(h): h = 2
a = [0 1 0]
( )1
1
1 si hi i
i i
ah p
p−
=
+⎡ ⎤= ⎢ ⎥⎢ ⎥⎢ ⎥
∑
h2= 4
sj(g,i) = max{aj(h-1), lj(g)}
Przykład
p = [20,50,30]h = 5
E(2) = {1,2,3}
a = [0 1 0]
303252201
pi/(ai+1)
11
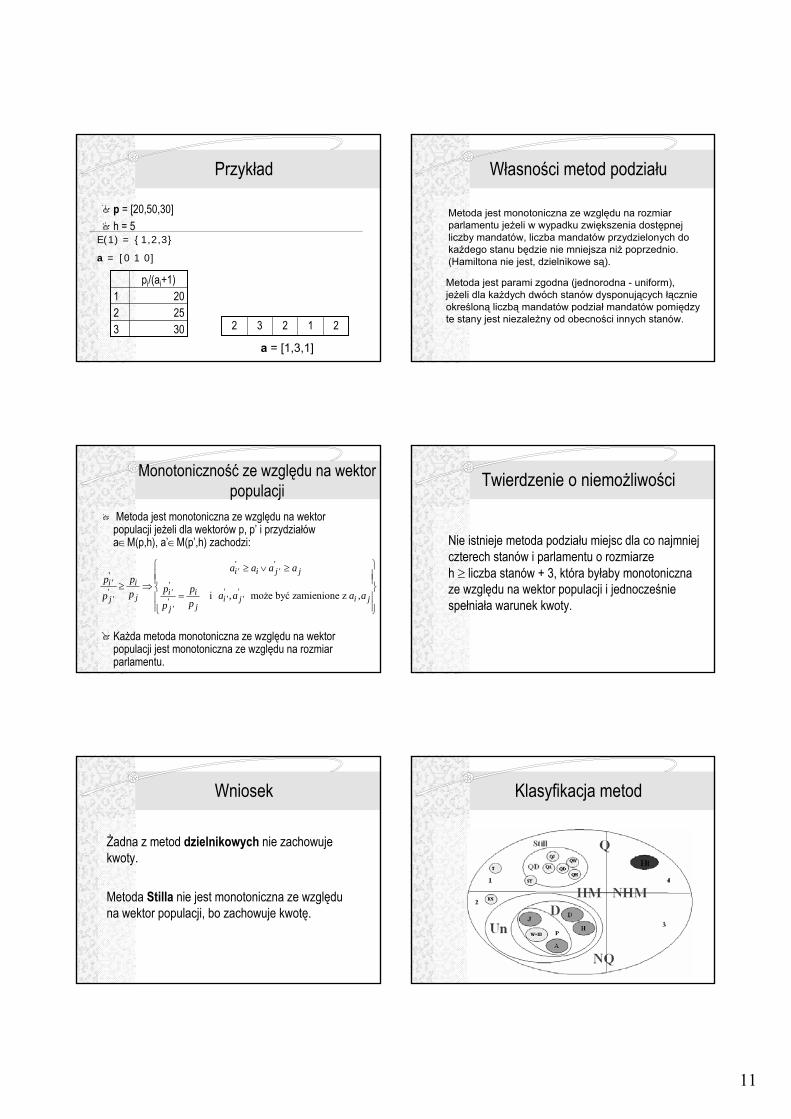
Przykład
p = [20,50,30]h = 5
303252201
pi/(ai+1)
E(1) = {1,2,3}
a = [0 1 0]
21232
a = [1,3,1]
Własności metod podziału
Metoda jest parami zgodna (jednorodna - uniform), jeżeli dla każdych dwóch stanów dysponujących łącznie określoną liczbą mandatów podział mandatów pomiędzy te stany jest niezależny od obecności innych stanów.
Metoda jest monotoniczna ze względu na rozmiar parlamentu jeżeli w wypadku zwiększenia dostępnej liczby mandatów, liczba mandatów przydzielonych do każdego stanu będzie nie mniejsza niż poprzednio. (Hamiltona nie jest, dzielnikowe są).
Monotoniczność ze względu na wektor populacji
Metoda jest monotoniczna ze względu na wektor populacji jeżeli dla wektorów p, p’ i przydziałów a∈M(p,h), a’∈M(p’,h) zachodzi:
Każda metoda monotoniczna ze względu na wektor populacji jest monotoniczna ze względu na rozmiar parlamentu.
i może być zamienione z
' 'i' i j' j'
i' i '' '' i' ij i' j' i jj' ' jj'
a a a ap p
p pp a ,a a ,appp
⎧ ⎫≥ ∨ ≥⎪ ⎪⎪ ⎪≥ ⇒ ⎨ ⎬
=⎪ ⎪⎪ ⎪⎩ ⎭
Twierdzenie o niemożliwości
Nie istnieje metoda podziału miejsc dla co najmniej czterech stanów i parlamentu o rozmiarze h ≥ liczba stanów + 3, która byłaby monotoniczna ze względu na wektor populacji i jednocześnie spełniała warunek kwoty.
Wniosek
Żadna z metod dzielnikowych nie zachowuje kwoty.
Metoda Stilla nie jest monotoniczna ze względu na wektor populacji, bo zachowuje kwotę.
Klasyfikacja metod
12
Pytania
Twierdzenie o niemożliwości (trzeba zdefiniowaćmetody monotoniczne ze względu na rozmiar populacji i zachowujące kwotę).Znaleźć rozwiązanie danego problemu podziału miejsc metodą …. (np. Adamsa).Metoda Hamiltona i paradoks Alabamy.
![Zastosowanie hybrydowej metody optymalizacji rojem cząstek ...archiwum.inig.pl/INST/nafta-gaz/nafta-gaz/Nafta-Gaz-2014-11-06.pdf · nej [7], metoda optymalizacji chaotycznej [15]](https://img.pdfslide.tips/doc/110x75/5c78e4b609d3f2cb498c3eb4/zastosowanie-hybrydowej-metody-optymalizacji-rojem-czastek-nej-7-metoda.jpg)





![C1-7 Zaawansowane komputerowe wspomagania projektowania · [2] W. Findeisen, J. Szymanowski, A. Wierzbicki, Teoria i metody obliczeniowe optymalizacji. PWN, Warszawa 1980. Warunki](https://img.pdfslide.tips/doc/110x75/5c76b8c009d3f2d3778c0b2e/c1-7-zaawansowane-komputerowe-wspomagania-2-w-findeisen-j-szymanowski.jpg)






















