Embed Size (px)
Citation preview

MICROSAR
プロダクトインフォメーション
MICROSAR
2
目 次
1 MICROSAR - ベクターの AUTOSAR ECU ソフトウェア用ソリューション ......................................................................................... 4
2 MICROSAR.OS ......................................................................................................................................................................... 10
3 MICROSAR.COM – 通信用 AUTOSAR ベーシックソフトウェアモジュール ................................................................................... 13
4 MICROSAR.CAN – CAN 通信用 AUTOSAR ベーシックソフトウェアモジュール .......................................................................... 16
5 MICROSAR.FR – FlexRay 通信用 AUTOSAR ベーシックソフトウェアモジュール ........................................................................ 20
6 MICROSAR.LIN – LIN 通信用 AUTOSAR ベーシックソフトウェアモジュール............................................................................... 23
7 MICROSAR.ETH – Ethernet 通信用 AUTOSAR ベーシックソフトウェアモジュール .................................................................... 26
8 MICROSAR.CHARGE – 外部インフラ通信用 AUTOSAR ベーシックソフトウェアモジュール ......................................................... 31
9 MICROSAR AVB – Ethernet 経由のオーディオ/ビデオ用のベーシックソフトウェアモジュール ................................................... 34
10 MICROSAR.MEM – メモリー管理用 AUTOSAR ベーシックソフトウェアモジュール ....................................................................... 37
11 MICROSAR.SYS – AUTOSAR 用のシステム関連のベーシックソフトウェアモジュール ................................................................. 40
12 MICROSAR.DIAG – AUTOSAR に対応した診断標準規格、UDS、OBD、J1939 の実装 ............................................................ 45
13 MICROSAR.MCAL –マイクロコントローラー周辺機能制御用 AUTOSAR ドライバー .................................................................... 51
14 MICROSAR.EXT – 外付デバイス制御用の AUTOSAR ドライバー .............................................................................................. 56
15 MICROSAR.IO – AUTOSAR I/O ハードウェアの抽象化 ............................................................................................................ 59
16 MICROSAR.RTE - AUTOSAR 仕様に対応したソフトウェアコンポーネント用の最適なランタイム環境 ............................................ 61
17 MICROSAR AMD – AUTOSAR のモニターおよびデバッグ ......................................................................................................... 64
18 MICROSAR ソリューション .......................................................................................................................................................... 68
19 MICROSAR Safe – ISO 26262 ASIL D までに準拠した機能安全 ECU 対応 ............................................................................. 69
20 MICROSAR Security – AUTOSAR ECU のためのアクセスセキュリティー .................................................................................. 72
21 MICROSAR.HSM – ベクターの Hardware Security Module 用ソリューション ........................................................................... 75
22 MICROSAR Gateway – ゲートウェイ ECU 用のベーシックソフトウェア........................................................................................ 80
23 MICROSAR Multi-core – マルチコアプロセッサー用の AUTOSAR ソリューション ....................................................................... 84
24 MICROSAR バリアントハンドリング – AUTOSAR の柔軟なコンフィギュレーションのためのソリューション ...................................... 87
25 MICROSAR J1939 – 大型車両専用の AUTOSAR ベーシックソフトウェアモジュール ................................................................... 90
26 MICROSAR vVIRTUALtarget – vVIRTUALtarget による仮想統合 ......................................................................................... 93
27 MICROSAR POSIX – AUTOSAR Classic の POSIX オペレーティングシステムへの接続 ........................................................... 97
28 MICROSAR.OTA – ソフトウェアダウンロード用ベーシックソフトウェアモジュール ........................................................................ 100
29 MICROSAR.IPC – プロセッサー間通信用 AUTOSAR ベーシックソフトウェアモジュール ............................................................ 101
30 MICROSAR.SIP と MICROSAR.EIP – AUTOSAR プロジェクトを迅速に始動 .......................................................................... 106
31 AUTOSAR Evaluation Bundle – AUTOSAR ベーシックソフトウェアおよびツールの評価用総合パッケージ .............................. 111
32 その他の情報 ........................................................................................................................................................................... 115
MICROSAR
3
V2.12.0 04/2019
発行元: ベクター・ジャパン株式会社
www.vector.com/jp/ja/ ※記述されている内容は予告なく変更されることがあります。(発行日:2019 年 12 月 25 日)
MICROSAR
4
1 MICROSAR - ベクターの AUTOSAR ECU ソフトウェア用ソリューション
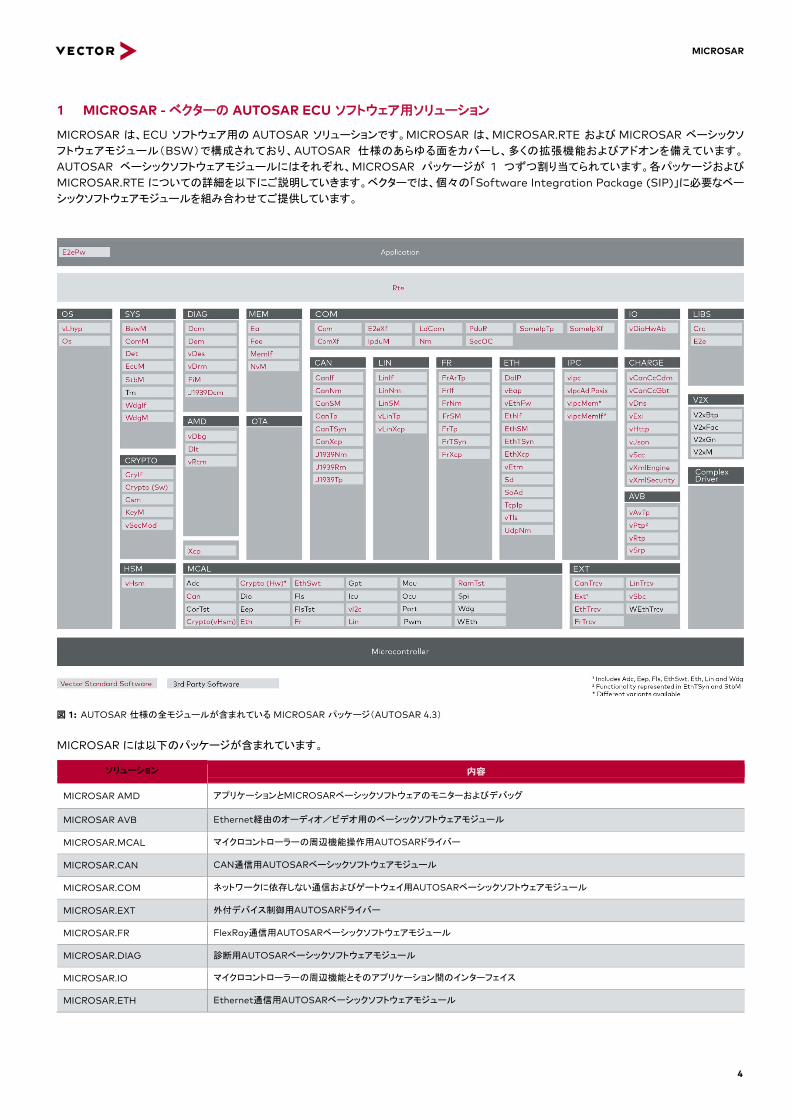
MICROSAR は、ECU ソフトウェア用の AUTOSAR ソリューションです。MICROSAR は、MICROSAR.RTE および MICROSAR ベーシックソ
フトウェアモジュール(BSW)で構成されており、AUTOSAR 仕様のあらゆる面をカバーし、多くの拡張機能およびアドオンを備えています。
AUTOSAR ベーシックソフトウェアモジュールにはそれぞれ、MICROSAR パッケージが 1 つずつ割り当てられています。各パッケージおよび
MICROSAR.RTE についての詳細を以下にご説明していきます。ベクターでは、個々の「Software Integration Package (SIP)」に必要なベー
シックソフトウェアモジュールを組み合わせてご提供しています。
図 1: AUTOSAR 仕様の全モジュールが含まれている MICROSAR パッケージ(AUTOSAR 4.3)
MICROSAR には以下のパッケージが含まれています。
ソリューション 内容
MICROSAR AMD アプリケーションとMICROSARベーシックソフトウェアのモニターおよびデバッグ
MICROSAR AVB Ethernet経由のオーディオ/ビデオ用のベーシックソフトウェアモジュール
MICROSAR.MCAL マイクロコントローラーの周辺機能操作用AUTOSARドライバー
MICROSAR.CAN CAN通信用AUTOSARベーシックソフトウェアモジュール
MICROSAR.COM ネットワークに依存しない通信およびゲートウェイ用AUTOSARベーシックソフトウェアモジュール
MICROSAR.EXT 外付デバイス制御用AUTOSARドライバー
MICROSAR.FR FlexRay通信用AUTOSARベーシックソフトウェアモジュール
MICROSAR.DIAG 診断用AUTOSARベーシックソフトウェアモジュール
MICROSAR.IO マイクロコントローラーの周辺機能とそのアプリケーション間のインターフェイス
MICROSAR.ETH Ethernet通信用AUTOSARベーシックソフトウェアモジュール
MICROSAR
5
ソリューション 内容
MICROSAR.LIBS AUTOSARライブラリー
MICROSAR.LIN LIN通信用AUTOSARベーシックソフトウェアモジュール
MICROSAR.MEM 不揮発性メモリー管理用AUTOSARベーシックソフトウェアモジュール
MICROSAR.OS AUTOSAR仕様に対応したリアルタイムオペレーティングシステム
MICROSAR.RTE AUTOSAR仕様に対応したソフトウェアコンポーネント用に最適なランタイム環境
MICROSAR Safe (MICROSAR.CRYPTO、MICROSAR.HSM) ECUソフトウェア用のISO 26262準拠のASIL Dまで対応可能な機能安全メカニズム(CRYPTO、HSMモジュールを含む)
MICROSAR.SYS AUTOSAR ECU用のシステム関連のベーシックソフトウェアモジュール
MICROSAR V2G 外部インフラとの通信用ベーシックソフトウェアモジュール
MICROSAR XCP XCP(Ethernet、FlexRay、CANのトランスポートレイヤー含む)を使用したAUTOSAR ECUの測定と適合
MICORSAR.OTA Over the air
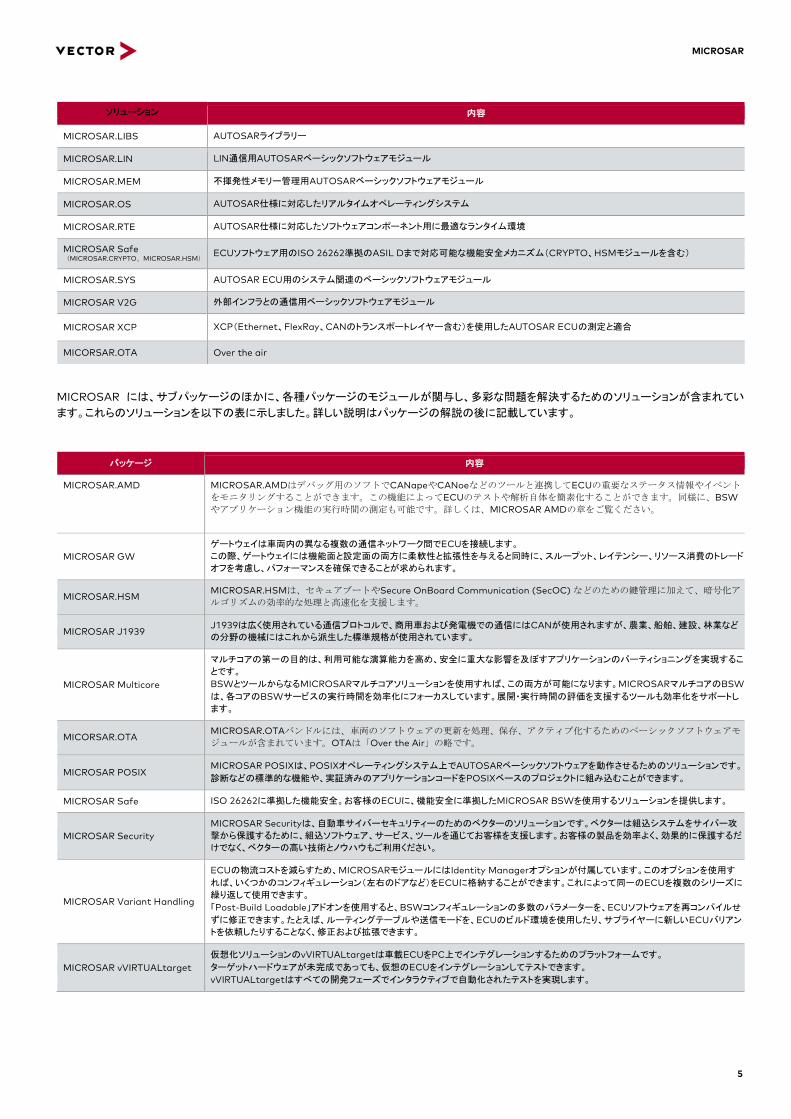
MICROSAR には、サブパッケージのほかに、各種パッケージのモジュールが関与し、多彩な問題を解決するためのソリューションが含まれてい
ます。これらのソリューションを以下の表に示しました。詳しい説明はパッケージの解説の後に記載しています。
パッケージ 内容
MICROSAR.AMD MICROSAR.AMDはデバッグ用のソフトでCANapeやCANoeなどのツールと連携してECUの重要なステータス情報やイベント
をモニタリングすることができます。この機能によってECUのテストや解析自体を簡素化することができます。同様に、BSWやアプリケーション機能の実行時間の測定も可能です。詳しくは、MICROSAR AMDの章をご覧ください。
MICROSAR GW ゲートウェイは車両内の異なる複数の通信ネットワーク間でECUを接続します。 この際、ゲートウェイには機能面と設定面の両方に柔軟性と拡張性を与えると同時に、スループット、レイテンシー、リソース消費のトレード
オフを考慮し、パフォーマンスを確保できることが求められます。
MICROSAR.HSM MICROSAR.HSMは、セキュアブートやSecure OnBoard Communication (SecOC) などのための鍵管理に加えて、暗号化ア
ルゴリズムの効率的な処理と高速化を支援します。
MICROSAR J1939 J1939は広く使用されている通信プロトコルで、商用車および発電機での通信にはCANが使用されますが、農業、船舶、建設、林業など
の分野の機械にはこれから派生した標準規格が使用されています。
MICROSAR Multicore
マルチコアの第一の目的は、利用可能な演算能力を高め、安全に重大な影響を及ぼすアプリケーションのパーティショニングを実現するこ
とです。 BSWとツールからなるMICROSARマルチコアソリューションを使用すれば、この両方が可能になります。MICROSARマルチコアのBSWは、各コアのBSWサービスの実行時間を効率化にフォーカスしています。展開・実行時間の評価を支援するツールも効率化をサポートし
ます。
MICORSAR.OTA MICROSAR.OTAバンドルには、車両のソフトウェアの更新を処理、保存、アクティブ化するためのベーシックソフトウェアモ
ジュールが含まれています。OTAは「Over the Air」の略です。
MICROSAR POSIX MICROSAR POSIXは、POSIXオペレーティングシステム上でAUTOSARベーシックソフトウェアを動作させるためのソリューションです。 診断などの標準的な機能や、実証済みのアプリケーションコードをPOSIXベースのプロジェクトに組み込むことができます。
MICROSAR Safe ISO 26262に準拠した機能安全。お客様のECUに、機能安全に準拠したMICROSAR BSWを使用するソリューションを提供します。
MICROSAR Security MICROSAR Securityは、自動車サイバーセキュリティーのためのベクターのソリューションです。ベクターは組込システムをサイバー攻
撃から保護するために、組込ソフトウェア、サービス、ツールを通じてお客様を支援します。お客様の製品を効率よく、効果的に保護するだ
けでなく、ベクターの高い技術とノウハウもご利用ください。
MICROSAR Variant Handling
ECUの物流コストを減らすため、MICROSARモジュールにはIdentity Managerオプションが付属しています。このオプションを使用す
れば、いくつかのコンフィギュレーション(左右のドアなど)をECUに格納することができます。これによって同一のECUを複数のシリーズに
繰り返して使用できます。 「Post-Build Loadable」アドオンを使用すると、BSWコンフィギュレーションの多数のパラメーターを、ECUソフトウェアを再コンパイルせ
ずに修正できます。たとえば、ルーティングテーブルや送信モードを、ECUのビルド環境を使用したり、サプライヤーに新しいECUバリアン
トを依頼したりすることなく、修正および拡張できます。
MICROSAR vVIRTUALtarget 仮想化ソリューションのvVIRTUALtargetは車載ECUをPC上でインテグレーションするためのプラットフォームです。 ターゲットハードウェアが未完成であっても、仮想のECUをインテグレーションしてテストできます。 vVIRTUALtargetはすべての開発フェーズでインタラクティブで自動化されたテストを実現します。

MICROSAR
6
1.1 適用分野
MICROSAR パッケージに含まれるベーシックソフトウェアモジュールは、ECU の基本機能を提供しています。モジュールには、アプリケーションソ
フトウェアに必要な AUTOSAR の標準サービスが実装されています。AUTOSAR アーキテクチャーは、ハードウェア抽象化という方針に一貫して
従っているので、ユーザーは機能ソフトウェアプラットフォームを自由に開発することができます。
MICROSAR.OS や MICROSAR.MCAL パッケージに含まれるモジュールはハードウェア依存型です。これらのモジュールについてベクターで
は、数多くのさまざまなハードウェアプラットフォームおよびコンパイラー用のモジュールを提供しているので、コントローラーデバイスの置換なども
スピーディーに実施できます。オペレーティングシステムの MICROSAR.OS は、シングルコアにもマルチコアプロセッサーにも利用できます。ベク
ターでは、自動車メーカーとの連携から得られる経験に基づき、診断モジュールをはじめとする自動車メーカー固有のベーシックソフトウェアモジュ
ールや拡張機能を数多く提供しています。
必要な MICROSAR ベーシックソフトウェアモジュールはすべて、お客様のプロジェクト要件に基づいて設定でき、作成後、モジュールをアプリケー
ションソフトウェアと統合することができます。このようにして、ECU ソフトウェア一式が完成します。機能ソフトウェアが AUTOSAR 対応ソフトウェ
アコンポーネントで構成されている場合は、ランタイム環境(Rte)が必要になります。MICROSAR.RTE は、ソフトウェアコンポーネント間の通信や、
ベーシックソフトウェアモジュールのデータやサービスへのアクセスを取り扱います。また、MICROSAR.RTE はイベントと情報のフロー全体を制
御するのに加え、情報交換の整合性を保証し、コア間またはメモリー保護領域のアクセス制御も行います。
ソフトウェアコンポーネントによるアーキテクチャーを持たない、すなわち Rte もない ECU プロジェクトは、ベクターの vBre (Vector Basic Runtime Environment) によりオプションでサポートされます。vBre は設定可能なベーシックソフトウェアのスケジュール機能やクリティカルセク
ションを管理する機能を提供するほか、通常は Rte が作成する、サービスレイヤーのベーシックソフトウェアモジュールのための型定義を作成す
るなどして統合を容易にします。そのため、Rte を使用していない AUTOSAR 4 ベースのプロジェクトの構築作業が加速および簡素化します。
1.2 特長
MICROSAR ベーシックソフトウェアモジュールの開発は、SPICE をベースとしたベクターの標準モジュール開発プロセスを基礎としています。
MICROSAR パッケージはいずれも以下の機能を提供しています。
> 優れたメモリー利用効率、短い実行時間
> 量産車に使用可能
> AUTOSAR 4.x および 3.x に対応
> ベーシックソフトウェアの設定で整合性を保てるよう支援、タイムリーなチェックも実施
> お客様独自のアプリケーションに合わせた高い拡張性と対応性
> お客様の開発プロセスに最適な形で統合
> ECU のテストおよび解析のための AUTOSAR モニター
> Configuration Variant はユーザーが選択可能(Pre-Compile Time、Link-Time、Post-Build Time)
> マルチプル ECU をサポート
> ソースコードでの提供(オプション)
> MICROSAR Safe と共に用いれば、安全関連機能(ISO 26262)に最適
1.3 量産車での使用
MICROSAR ベーシックソフトウェアモジュールはすでに量産プロジェクトで利用されています。MICROSAR には、標準組込ソフトウェア実装に関
するベクターの長年にわたる経験が生かされています。MICROSAR ソフトウェアモジュールに対しては、すべて納品前に、お客様アプリケーショ
ン固有の条件(ハードウェアプラットフォーム、コンパイラー、プロセッサーデバイス、自動車メーカー、Rte の有無など)に合わせて体系的な統合テ
ストを実施しています。ご要望に応じ、テスト対象をサードパーティー製のソフトウェアモジュール(MCAL ドライバーなど)にまで広げることも可能
です。
1.4 AUTOSAR 4.x および 3.x に対応
AUTOSAR 4.x と 3.x のどちらを使用するかに関わらず、お客様はベーシックソフトウェア全体を、ベクターという 1 つの供給元から調達できます。
プロジェクトを移行しても、AUTOSAR 4.x と 3.x の両方に共通する以下のような開発ワークフローを利用できます。
> 設定ツールの DaVinci Developer と DaVinci Configurator Pro は両方のリリースに対応しています。そのため、ツールを変更する必要
はありません
> 異なる AUTOSAR リリースの MCAL ドライバーを、MICROSAR に組み込むことができます
MICROSAR
7
AUTOSAR 3 から 4 に移行する場合、ベクターはお客様が AUTOSAR 4.x 規格で変更されたインターフェイスに合わせてアプリケーションソフト
ウェアを修正する際のサポートを行います。
MICROSAR には他にも、AUTOSAR 4.x で規定されている機能が、AUTOSAR 3.x 用ベーシックソフトウェアモジュールの拡張機能の形で多数
用意されているという強みがあります。たとえばマルチコアオペレーティングシステムのほか、J1939、XCP、Ethernet/IP などもすでに
AUTOSAR 3.x でサポート可能となっています。MICROSAR.MOST バンドルはベクターがこの規格を補うために提供しているもので、
AUTOSAR 4.x および AUTOSAR 3.x と互換性があります。
1.5 一貫性のあるシンプルな設定
AUTOSAR では、ECU ソフトウェア基本機能の開発や適合を手作業ではなく、ベーシックソフトウェアモジュールの設定で行うことになっています。
この設定作業では、直観的で使いやすいベクターの AUTOSAR ツール(DaVinci)が役に立ちます。DaVinci ツールのマルチユーザーサポート
により、複数ユーザーで 1 つのプロジェクトを同時作業することが可能です。DaVinci ツールでは、入力に「ECU Extract of System Description」ファイルが必要です。一般に使用されているネットワーク記述ファイル(DBC、FIBEX、LDF など)をベースにして設定を作成するこ
とも可能です。
設定プロセスの初期段階では、DaVinci の各ツールが個々のパラメーター、複雑なパラメーターグループ、またそれらの相互関係の妥当性を確
認します。不正な設定があった場合、可能であれば、ツールが修正を提案します。AUTOSAR 手法をこのように広く用いることで、ベーシックソフト
ウェアの ECU への統合が簡素化され、統合に要する時間が短縮できます。
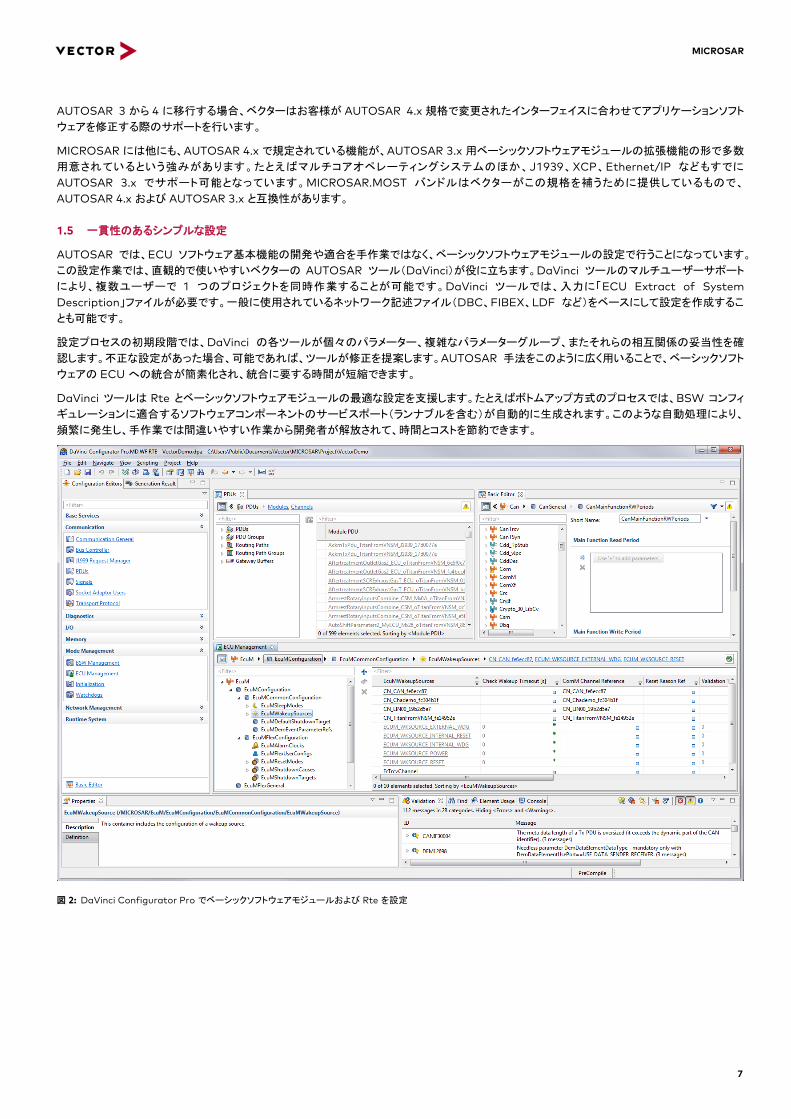
DaVinci ツールは Rte とベーシックソフトウェアモジュールの最適な設定を支援します。たとえばボトムアップ方式のプロセスでは、BSW コンフィ
ギュレーションに適合するソフトウェアコンポーネントのサービスポート(ランナブルを含む)が自動的に生成されます。このような自動処理により、
頻繁に発生し、手作業では間違いやすい作業から開発者が解放されて、時間とコストを節約できます。
図 2: DaVinci Configurator Pro でベーシックソフトウェアモジュールおよび Rte を設定
MICROSAR
8
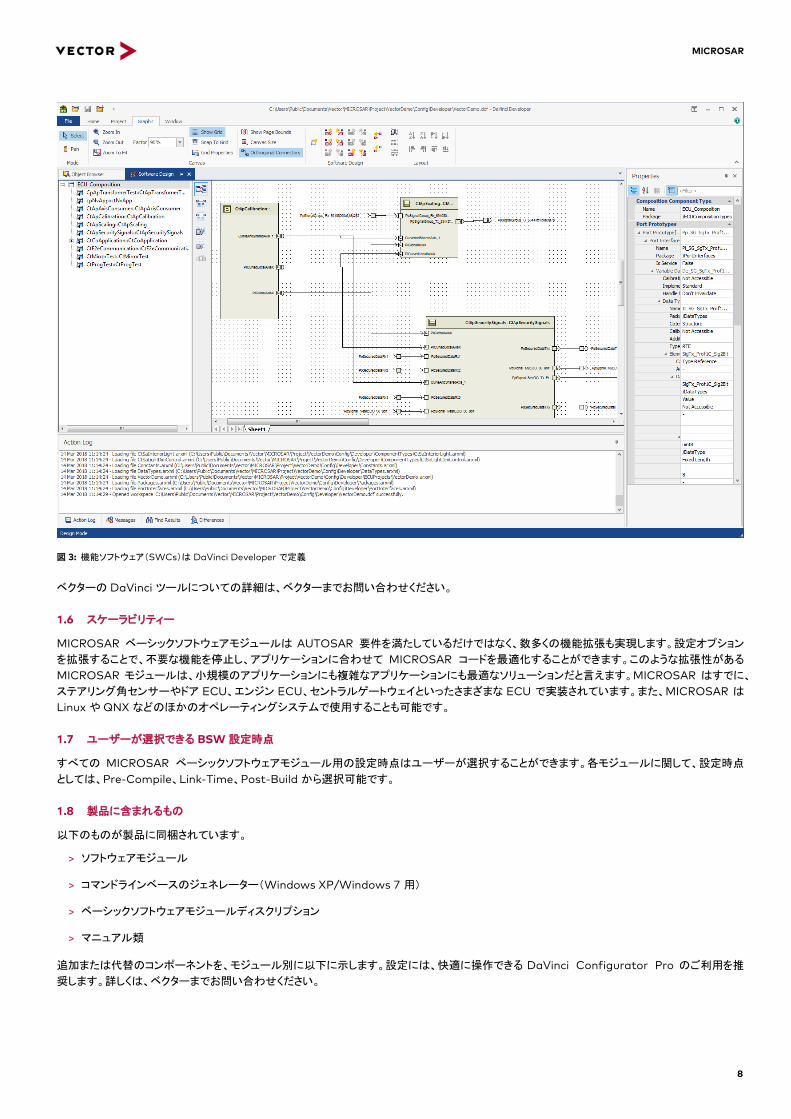
図 3: 機能ソフトウェア(SWCs)は DaVinci Developer で定義
ベクターの DaVinci ツールについての詳細は、ベクターまでお問い合わせください。
1.6 スケーラビリティー
MICROSAR ベーシックソフトウェアモジュールは AUTOSAR 要件を満たしているだけではなく、数多くの機能拡張も実現します。設定オプション
を拡張することで、不要な機能を停止し、アプリケーションに合わせて MICROSAR コードを最適化することができます。このような拡張性がある
MICROSAR モジュールは、小規模のアプリケーションにも複雑なアプリケーションにも最適なソリューションだと言えます。MICROSAR はすでに、
ステアリング角センサーやドア ECU、エンジン ECU、セントラルゲートウェイといったさまざまな ECU で実装されています。また、MICROSAR は
Linux や QNX などのほかのオペレーティングシステムで使用することも可能です。
1.7 ユーザーが選択できる BSW 設定時点
すべての MICROSAR ベーシックソフトウェアモジュール用の設定時点はユーザーが選択することができます。各モジュールに関して、設定時点
としては、Pre-Compile、Link-Time、Post-Build から選択可能です。
1.8 製品に含まれるもの
以下のものが製品に同梱されています。
> ソフトウェアモジュール
> コマンドラインベースのジェネレーター(Windows XP/Windows 7 用)
> ベーシックソフトウェアモジュールディスクリプション
> マニュアル類
追加または代替のコンポーネントを、モジュール別に以下に示します。設定には、快適に操作できる DaVinci Configurator Pro のご利用を推
奨します。詳しくは、ベクターまでお問い合わせください。

MICROSAR
9
1.9 ソースコードの提供
MICROSAR モジュールは、ごくわずかの例外を除いて、ソースコードで提供されます。ソースコードの場合、プリコンパイルによる最適化やテスト
の簡素化が可能です。
1.10 ライセンスおよび保守
ベクターは、お客様のご要望に合わせて個々にカスタマイズした柔軟なライセンスを提供します。保守契約の一環としてソフトウェアの更新を提供
し、常に最新レベルを保てるようにします。
1.11 その他のサービス
> システム設計に関するコンサルティング
> お客様のご希望に合わせた MICROSAR ベーシックソフトウェアモジュールの拡張
> お客様固有のソフトウェアコンポーネント(SWC)の開発
> 既存の機能ソフトウェアの適合作業をサポート
> ECU へのソフトウェア統合(サードパーティー製ソフトウェアを含む)
> 既存ソフトウェアの AUTOSAR ベースコンセプトへの移行
> 組込ソフトウェアと AUTOSAR に関するホットラインサポート、トレーニングコース
1.12 ベクターの AUTOSAR ソリューション
ベクターの AUTOSAR ソリューションは、DaVinci ツール、MICROSAR ベーシックソフトウェア、MICROSAR.RTE から構成されています。
MICROSAR パッケージに含まれるベーシックソフトウェアモジュールの一般的な特性については、以下の章で説明します。各 DaVinci ツールの
機能的な特性については、それぞれのプロダクトインフォメーションをご覧ください。
1.13 お問い合わせ
MICROSAR ベーシックソフトウェアモジュールは、一般に広く使用されている各種マイクロコントローラーや、自動車メーカー固有のバリアントでも
使用できます。詳しい情報は、ベクター([email protected])までお問い合わせください。
お問い合わせ先については www.vector.com/jp/ja/company/contacts/をご覧ください。
1.14 トレーニング
ベクターでは、AUTOSAR に関するトレーニングを開催しております。また、規模やご要望に応じて、お客様ご指定の場所でのオンサイトトレーニ
ングも実施しております。
ベクターのトレーニングについての詳細は、Web サイトにてご覧ください(https://vector-academy.com/vj_training_jp.html)。

MICROSAR
10
2 MICROSAR.OS
MICROSAR.OS は、マイコン上での利用を目的として設計された、プリエンプティブなリアルタイムマルチタスクオペレーティングシステムです。 各種マイコン用 OS およびドライバーの開発におけるベクターの長年の経験を生かし、コンパクトで堅牢な OS コアを実現しました。
LeanHypervisor は、マルチコアプロセッサーが持つ複数のパーティションまたは SoC の安全な起動をサポートするモジュールです。このモジュ
ールはシステム MPU を初期化し、別のパーティションを起動します。
図 4: AUTOSAR 4.3 対応の MICROSAR.OS モジュール
2.1 機能概要
> 小型かつ高速でリソース効率に優れ、起動時間も短いオペレーティングシステム
> MICROSAR.OS は AUTOSAR 4.x および 3.x に対応
> マルチコアオペレーティングシステムに対応
> 設定が簡単に行えるグラフィカルな設定ツール
> OS:16bit、32bit および 64bit など、多くのマイコンに使用可能
> OS:マルチコアオペレーティングシステムに対応
> LeanHypervisor:複数のオペレーティングシステムパーティションの安全な起動
> LeanHypervisor:ISO 26262/ASIL D に準拠した実装
> LeanHypervisor:マスターコアを自由に選択可能
2.2 適用分野
MICROSAR.OS は、実績のある OSEK/VDX-OS オペレーティングシステム標準を拡張した、AUTOSAR OS 仕様に基づいています。この標
準をもとに、時間監視とメモリー保護をサポートするための機能が追加されています。たとえば、実装されている High Resolution Timer メカニズ
MICROSAR
11
ムを利用することで、割込み負荷を上げることなく 1ms よりも短い時間分解能が可能になります。コントローラーによっては、マイクロ秒単位に設
定することができます。
ベクターの MICROSAR.OS は、AUTOSAR OS 仕様に完全対応しており、すべてのスケーラビリティークラスに対応が可能です。
オペレーティングシステムパーティションはシステム MPU によって保護されているため、正しくないデータ変更による相互干渉が実行中に生じる
恐れはありません。そのため、異なる ASIL を持つパーティションを並行して動作させることができます。
LeanHypervisor は ISO26262/ASIL D に準拠して実装されており、システム起動時にシステム MPU をプログラムした後、オペレーティングシ
ステムパーティションを起動します。オペレーティングシステムパーティションはシステム MPU によって保護されているため、誤ったデータ変更によ
る相互干渉が実行中に生じる恐れはありません。これによって、異なる ASIL を持つパーティションを並行して動作させることが可能になります。マ
スターコアは自由に選択可能です。リセット後にハードウェアが ASIL 互換のカーネルを起動しない場合、保護機能の初期化を ASIL 互換の他の
カーネルに割り当てることができます。
2.3 モジュールおよびアドオン
> Os (SC1) – オペレーティングシステムスケーラビリティークラス 1
OSEK/VDX-OS 標準に対応して実装され、さらにスケジュールテーブルが追加された、リアルタイムオペレーティングシステム
> 拡張によりスケジュールテーブルを追加
> Os (SC2) – オペレーティングシステムスケーラビリティークラス 2
個々のタスクおよび割込みサービスルーチンの時間同期および時間動作のモニターを行う、リアルタイムオペレーティングシステム
> タイミング保護により、初期設計段階で想定された実行時間の上限を、実行時にも、超過のモニターという形で保証することができます。そ
の結果、あるアプリケーションセクションに不具合が生じたときに、他の実行中のプロセスにおける実行時間に悪影響を及ぼさないようにし
ます
> アプリケーションの実行時間と割込みブロック時間を測定。測定したデータは、将来のアプリケーションを設計して統合する際に、実際の測
定値として活用することができます
> Os (SC3) – オペレーティングシステムスケーラビリティークラス 3
マイコンのハードウェア機能を利用したメモリー保護機能を持つ、リアルタイムオペレーティングシステム
> メモリー領域を保護することにより、他のアプリケーションのデータを破壊することなく、より簡単、確実にアプリケーションを統合することが
できます
> Os (SC4) – オペレーティングシステムスケーラビリティークラス 4
SC2 と SC3 を組み合わせた内容
アドオン
以下のアドオンは、スケーラビリティークラス(SC1 から SC4)に依存せず、すべての OS で利用できます。
> Multi-Core (asymmetric):Multi-core (symmetric) アドオンは、同じコマンドセットを持ち、単一のプログラムを複数のコアで処理可
能なマルチコアシステムを AUTOSAR 仕様に準拠して開発する際に使用されます。これは AUTOSAR 仕様 4.x に基づいていますが、
AUTOSAR 3.x のプロジェクトでも使用できます
> Multi-Core (asymmetric):Multi-core (asymmetric) アドオンは、異なるコマンドセットを持つため、それぞれのコアで決められた処
理を行うマルチコアシステムを AUTOSAR 仕様に準拠して開発する際に使用されます。これは AUTOSAR 仕様 4.x に基づいていますが、
AUTOSAR 3.x のプロジェクトでも使用できます
> vLhyp - Lean Hypervisor
マルチコアアプリケーションでは、LeanHypervisor モジュールが起動時にシステムメモリー保護ユニット(MPU)を初期化し、コアの起動を
管理します。各コアはそれぞれが独自にオペレーティングシステムイメージを持つことが可能です。POSIX、Classic AUTOSAR、Adaptive AUTOSAR の各オペレーティングシステムをどのように組み合わせてもかまいません。
パーティションはシステム MPU によって保護されているため、さまざまなパーティションをメモリーアクセスの干渉を起こさずに動作させるこ
とができます。そのため、異なる ASIL を持つパーティションを並行して実行することも可能です。
マスターコアは自由に選択可能です。電源投入後に起動した、あるいはリセットされたコアが ASIL の要求を満たさない場合、保護機能の初
期化を ASIL に準拠したコアに割り当てることができます。
MICROSAR
12
LeanHypervisor によってパーティションの独立性が保証されます。各パーティションはローカルメモリーの保護要求のみに対処すれば済み
ます。また、パーティションは初期化のために同期をとった待ち状態を実装する必要がありません。このような実装が減ることで、単独のパー
ティションの開発が容易になります。
LeanHypervisor は ASIL D に準拠した、Safety Element out of Context (SEooC) として開発されています。LeanHypervisor はパ
ーティションの起動後は CPU の読込みを必要としません。
2.3.1 High Resolution Timer (HRT)
AUTOSAR オペレーティングシステムは通常、周期タイマ(PIT)を使用してシステムタイムを生成します。そして、システムカウンターのトリガーに
使用される周期時間によって時間分解能が決定されます。トリガーはそれぞれが割込みに相当します。インテグレーションエンジニアは一般に、割
込み負荷と時間分解能の間の妥協点を探さなければなりません。アプリケーションによっては、許容できる妥協点よりも高い時間分解能が必要に
なるケースもあります。
2.4 グラフィカルな設定および生成ツール
設定には、快適に操作できる DaVinci Configurator Pro のご利用を推奨します。これには、整合性チェックとジェネレーター呼出し機能が装備
されています。ジェネレーターはコマンドラインツールとして実装されており、コード生成を容易に行うことができます。
2.5 製品に含まれるもの
MICROSAR.OS には、以下のものが含まれます。
> OS コアのソースコード
> Basic editor として DaVinci Configurator Base
> コマンドラインベースのジェネレーター
> ベーシックソフトウェアモジュールディスクリプション
> マニュアル類

MICROSAR
13
3 MICROSAR.COM – 通信用 AUTOSAR ベーシックソフトウェアモジュール
MICROSAR.COM のベーシックソフトウェアモジュールには、ECU 通信用の AUTOSAR サービスが含まれています。これらのサービスは、通
信チャンネルをいくつでもサポートできるようになっています。バスの種類に依存せず、あらゆる通信スタックで必要とされるサービスです。
AUTOSAR アーキテクチャーに基づき、CAN、CAN-FD、J1939、FR、LIN、ETH といった、バス固有の通信モジュールの ECU ソフトウェアの
制御と完全統合を担っています。
図 5: AUTOSAR 4.3 対応の MICROSAR.COM モジュール
3.1 機能概要
> アプリケーションに合った設定でコードや実行時間を最適化
> AUTOSAR 4.x および 3.x に対応
> AUTOSAR 仕様の枠を越えた便利な拡張機能を多数搭載(「機能」の章を参照)
> Nm コーディネーターに関するサポートを拡張(「機能」の章を参照)
> Nm モジュール:OSEK NM との互換性は設定可能
> Nm 移行プロジェクトにおける AUTOSAR Nm および OSEK Nm の同時運用をサポート
> 関数マクロによりシグナルアクセスの効率を向上(AUTOSAR 3 対応)
3.2 適用分野
MICROSAR.COM を使用することで、バスに全く依存しない手法で機能ソフトウェアを開発することができます。メッセージ送信やバス間ネットワ
ークの管理業務で必要なタスクはすべて、MICROSAR.COM に含まれているベーシックソフトウェアモジュールの Com、Nm、PduR、IpduM に
よって処理されます(モジュールは設定可能)。
ゲートウェイ ECU については、追加のソフトウェアはいりません。シグナルおよび Tp のルーティングや、アプリケーションメッセージのルーティン
グは MICROSAR.COM に含まれるベーシックソフトウェアモジュールの Com および PduR が行います。
MICROSAR
14
3.3 モジュールおよびアドオン
MICROSAR.COM の各モジュールには、AUTOSAR 仕様の枠を超えたベクター独自の拡張や、追加のアドオンが装備されている場合がありま
す。
> Com - Communication
> Com モジュールのサービスは、メッセージの送信タイプ(サイクリック、イベントトリガーなど)に基づき、メッセージ送信を管理します。主なタス
クは、バスに依存しないアプリケーションシグナルを PDU に実装することです
AUTOSAR 標準からの拡張
> Rx 信号タイムアウト時の TX 信号の無効宣言
> main 関数の実行時間を短縮するための最適化(Rx 側:受信イベントのキャッシング、Tx 側:複数の時間ドメインの設定)
> Rx IPDU の遅延イベントキャッシング。これは Rx PDU のイベントトリガー処理による、Rx main 関数の実行時間の最適化です。この最
適化により、main 関数の Rx ですべての PDU を周期的にポーリングせずに済みます
アドオン
> GW for Com:Com モジュールへのゲートウェイ機能の付与。シグナルおよびシグナルグループのルーティングが可能です。Com での
ルーティングは、実際のシグナルやシグナルグループが存在しなくても、設定記述により実現できます
> ハイエンド機能:このオプションにより、以下の機能が Com モジュールで有効になります
> Description based routing:このオプションにより、転送モード(periodic、event triggered、on changes)を含んだ PDU セグメント
のルーティングが可能になります(スタートビットとデータ長で定義されます)。これにより、シグナルベースのルーティングやサイクル遅延
による PDU ルーティングに替わる、極めて効率のよいルーティングが実現します。この機能には、先に述べたゲートウェイオプションが
必要です
> PduR – PDU Router
PDU Router (PduR) は Com および Dcm の各モジュールと複合ドライバーに、異なるバスシステムの通信モジュール(インターフェイス、
転送プロトコル、ネットワークマネージメント)へのインターフェイスを提供します。このインターフェイスは PDU を介いたデータの送受信にサ
ービスを提供します。PduR は多様なバスシステムの通信モジュール間のゲートウェイも実装します。MICROSAR モジュールの CDD は、
TP および IF-PDU を以下のように Com スタックにインテグレーションできます。
> PDU Router の上または下
> 通信インターフェイスの上
アドオン
> GW for PDU
> TP およびメッセージルーティング
> 範囲指定ルーティングの場合のメタデータによるルーティング
> 可変アドレスのルーティング(「動的ゲートウェイ」)
> 動的な PDU 長のルーティング
> Nm – Network Management
Network Management Interface (Nm) は、ECU の通信チャンネルすべてのバス間ネットワーク管理機能を提供します。また、Nm コ
ーディネーターとして、通信チャンネルのウェイクアップとスリープの同期を実行します。
AUTOSAR 標準からの拡張
> 複数の異なる Nm コーディネーターによる、複数ネットワークのスリープとウェイクアップの同期
> バックアップコーディネーター
> 設定可能な OSEK NM への対応
> 1 つのチャンネル上で OSEK と AUTOSAR-Nm の混在運用
> IPduM – IPDU Manager

MICROSAR
15
オプションとして、ECU ソフトウェアの通信スタックで IPduM (I-PDU Multiplexer) を使用することもできます。IPduM は、フレームに対し
てデータの割付けを多重化し、複数の用途で使用できるようにします。これは従来のバスシステムの場合は静的なコンフィギュレーションを通
じて、あるいは CAN FD の場合は動的なデータコンテンツのマッピングを通じて行われます。
> SecOC – Secured OnBoard Communication
SecOC (Secured OnBoard Communication) について詳しくは、「MICROSAR Security」の章を参照してください。
> Transformer
複雑なデータ構造とサイズの大きい PDU をネットワーク上で効率的に伝送できるようにします。
> ComXf 多数のシグナルから構成された効率的なシグナルグループを使用できます。配置は Extract of System Description から導出
されます
> SomeipXf:さまざまなデータタイプに応じたシリアル化の手順を提供します。LDCOM を使用することにより、効率のよい伝送が可能にな
ります
> E2eXf:AUTOSAR のトランスフォーマーのコンセプト(COMXF または SOMEIPXF によるシリアル化)を使用して管理されるネットワー
ク通信を、エンドツーエンドで保護します
> vMirror – Gateway Mirroring
ゲートウェイミラーリング:内部バスを診断用のチャンネルにミラーリングできます。これにより、通常はアクセスできないバス上のメッセージを
読み込み、問題を特定することができます。基本バージョンの場合、この機能では 1 つの内部 CAN または LIN チャンネルを診断用の
CAN にミラーリングできます。
アドオン
> ETH:複数の CAN、LIN、FR、ETH チャンネルの診断用 ETH へのミラーリング
> FR:CAN、LIN、FR チャンネルの診断用 CAN または FR へのミラーリング
3.4 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
DaVinci Configurator Pro を使用すれば、MICROSAR.COM モジュールの PduR と、Canif、Linif、Frif、Ethif (SoAd) の各モジュールを、
設定を使用してお客様自身のコンプレックスドライバーに簡単にリンクできます。
図 6: DaVinci Configurator Pro による MICROSAR.COM モジュールの設定

MICROSAR
16
4 MICROSAR.CAN – CAN 通信用 AUTOSAR ベーシックソフトウェアモジュール
MICROSAR.CAN パッケージには、AUTOSAR アーキテクチャーに CAN 通信用に定義されているベーシックソフトウェアモジュール CanIf、CanNm、CanTp、CanSm が含まれており、オプションで J1939 や Xcp 用モジュールもあります。
図 7: AUTOSAR 4.3 対応の MICROSAR.CAN モジュール
4.1 機能概要
> AUTOSAR 4.x および 3.x に対応
> 便利な拡張機能を多数搭載
> ニーズに合わせた設定に基づき、コードおよび実行時間を最適化
> すべての通信固有のソフトウェアモジュールについて、モジュール間設定が可能
> ECU 起動時の高速ウェイクアップ処理
> CanTp:ISO 15765-2 への対応は設定可能
> CanNm と OSEK Nm の互換性:OSEK Nm は設定可能なモジュールとして利用可能
> CanNm、CanSm:パーシャルネットワークの状態に応じた通信スタックの制御(オン/オフ)
> CAN-FD:帯域幅の拡張により最大 64 バイトのデータをサポートし、多数の CAN-FD コントローラーに対応
4.2 適用分野
MICROSAR.CAN は、CAN ネットワーク通信処理に使用されます。また、XCP でのキャリブレーション、ゲートウェイ、フラッシングの基盤として
も適しています。MICROSAR.CAN は、別途入手可能な MICROSAR J1939TP パッケージと組み合わせて使用することで、J1939 ネットワー
クで AUTOSAR ECU を操作することもできます。その場合、BAM および CMDT トランスポートプロトコルの使用が可能です。

MICROSAR
17
4.3 モジュールおよびアドオン
MICROSAR.CAN のベーシックソフトウェアモジュールには AUTOSAR 4.x で定義されている機能が含まれています。MICROSAR.CAN には
以下の機能があります。
> CanIf – CAN インターフェイス
CanIf モジュールは、CAN ドライバーに対する、抽象化された(PDU ベースの)アクセスを提供します。これはトランシーバードライバー
(CanTrcv)に加え、CAN ドライバー(Can)も制御します。
AUTOSAR 標準からの拡張
> ダブルハッシュ検索アルゴリズムで受信メッセージをフィルタリング
> CanNm – CAN Network Management
CanNm モジュールは、CAN ネットワーク内でウェイクアップ状態とスリープ状態を切り替える処理を担当します。
AUTOSAR 標準からの拡張
> プリコンパイルによる最適化(シングルチャンネルシステムの場合など)
> CanTp – CAN Transport Protocol
CanTp モジュールは ISO 15765-2 の標準規格に準拠しています。これは CAN のトランスポートプロトコルで、送信データのセグメント化、
受信データの収集、データストリームのモニタリングを担当します。
AUTOSAR 標準からの拡張
> プリコンパイルによる最適化(シングルチャンネルシステムの場合など)
> アドレッシングの混在をサポート(11bit の CAN ID)、主に CAN/LIN ゲートウェイアプリケーション用
> MICORSAR.COM に含まれる PDUR と協調して、ASR 4.0 に対応したルーティングの最適化(バースト伝送など)
> ISO 15765-2 への対応は設定可能
> CanSm– CAN Station Manager
CanSM モジュールはバス固有のエラー処理を担当します。
AUTOSAR 標準からの拡張
> ECU パッシブモードのサポート
> CanTSyn – CAN Time Synchronization
CanTSyn モジュールは、CAN 固有の時間同期プロトコルを実現します。同期されているタイムベースに SWC がアクセスするには、
Synchronized Time-Base Manager (StbM) が必要です。
AUTOSAR 標準からの拡張
> Time Synchronization over CAN (CanTSyn) は、CAN のための時間同期プロトコルを実装します。これによって AUTOSAR のグロ
ーバル時間のコンセプトの一部として CAN ECU 間のクロック同期が可能になります。高レベルの時間コーディネーターには
MICROSAR.SYS の Synchronized Time-Base Manage (StbM) ベーシックソフトウェアモジュールを利用できます
> CanXcp – CAN XCP Module
Xcp はマスター(PC ツール)とスレーブ(ECU)の間の通信のためのプロトコルです。これは ASAM によって標準化されており、主に ECUの測定、キャリブレーション、フラッシュ、テストに使用されています。XCP は CAN (CanXcp)、FlexRay (FrXcp)、Ethernet (EthXcp)、LIN (vLINXCP) の各バスシステムをサポートします。
4.3.1 以下の機能またはモジュールは、オプションで提供可能です。
> J1939Nm – Network Management for J1939
J1939 は動作中のネットワークへの ECU の追加をサポートします。J1939Nm モジュールは、バスのウェイクアップまたはスリープ処理を
行う他の NM モジュールとは異なり、固有の ECU アドレスを使用することをネットワーク上に宣言します(「AddressClaim」)。
アドオン
> Dynamic Nm:アドレスが変わる ECU、またはアドレスが変わる ECU と通信する ECU
MICROSAR
18
> J1939Tp – Transport Protocol for J1939
J1939Tp モジュールには、SAE J1939 標準規格の BAM (Broadcast Announce Message) および CMDT (Connection Mode Data Transfer) のトランスポートプロトコルが含まれています。
アドオン
> ISOBUS:Extended Tp (ETP) および Fast Packet Tp (FPTP)。ISO 11783-2 および NMEA2000 に基づいています
> J1939Rm – Request Manager for J1939
J1939Rm モジュールは、SAE J1939 プロトコルで定義されているリクエスト処理を介したデータの要求を実装します。
4.3.2 クロスパッケージのアドオン
アドオンの中には複数のパッケージに影響を与えるものもあります。以下にその詳細を示します。
> MICROSAR.IDM – Identity Manager:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
> MICROSAR.MC – Multi-Core:詳しくは、「MICROSAR Multi-Core」のセクションをご覧ください
> MICROSAR.PBL – Post Build Loadable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
4.4 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
4.5 その他の CAN 通信スタック用 MICROSAR 製品
AUTOSAR アーキテクチャーに基づき、CAN 用の完全な通信スタックは、MICROSAR.CAN および別途入手可能な MICROSAR.COM、
MICROSAR.MCAL、MICROSAR.EXT の各パッケージのベーシックソフトウェアモジュールで構築されています。MICROSAR.CAN をアプリケ
ーションやハードウェアと接続させるには、以下のベーシックソフトウェアモジュールも必要です。
> MICROSAR.MCAL のハードウェア固有 CAN ドライバー(CanDrv)
> MICROSAR.EXT のハードウェア固有トランシーバー制御(CanTrcv)、パーシャルネットワーキングにも使用可能
> MICROSAR.COM の汎用通信モジュール(Com、Nm、PduR、IpduM)
MICROSAR.MCAL および MICROSAR.EXT のモジュールは、各種マイクロコントローラーやトランシーバーに対応しています。
4.6 その他の CAN 用 MICROSAR 関連製品
> MICROSAR.DIAG の Dcm および Dem
> MICROSAR.SYS の Det、 EcuM、ComM
> MICROSAR XCP により、ASAM XCP に準拠した測定とキャリブレーションが可能になります。モジュールは CANoe.XCP および
CANoe.AMD に加え、CANape との併用に特化して最適化されています。CAN ECU 用として、MICROSAR XCP には適切な
CANXCP トランスポートレイヤーが含まれています
> MICROSAR XCP は AUTOSAR 仕様の枠を超えて、測定オブジェクトの汎用的な読出しをサポートします。そのため、A2L ファイルでのア
ドレスの定義や更新は不要です。あらゆるバージョンおよびバリアントからのデータを、MCU ビルドから独立して、A2L ファイルを用いて抽
出できます。汎用読出し機能の使用には、XCP ツールとして CANoe.AMD または CANape を使用する必要があります
> 安全上の理由から、量産プロジェクトではほとんどの場合、測定やキャリブレーションのインターフェイスを有効のままにしておくことはできま
せん。VX1000If モジュールを使用すると、測定およびキャリブレーションハードウェアである VX1000 のドライバーを、量産時でも無効化し
た状態でベーシックソフトウェアに残しておくことができます。検査や開発の際は、API を通じてこの VX1000 ドライバーを再び有効化できま
す。量産品で使用する場合は、納入時にこのモジュールを MICROSAR.SIP に含めて、このユースケースの承認を受けてください。ただし、
VX1000If 使用時は、量産プロジェクトでもランタイム中に VX1000 ドライバーの有効化はできません
> 商用車における J1939 ECU について詳しくは、「MICROSAR J1939」のセクションをご覧ください

MICROSAR
19
4.7 CAN ECU 開発用ベクターツールチェーン
図 8: ベクターは、CAN プロジェクト用の幅広い製品およびサービスを提供しています

MICROSAR
20
5 MICROSAR.FR – FlexRay 通信用 AUTOSAR ベーシックソフトウェアモジュール
ベクターでは、AUTOSAR 対応の FlexRay 通信用パッケージ MICROSAR.FR を提供しています。パッケージには、AUTOSAR アーキテクチャ
ーに定義されているベーシックソフトウェアモジュールの FRIF、FRNM、FRSM が含まれており、また、FRTP か FRISOTP のどちらかを選択で
きます。MICROSAR.FR はオプションとして XCP での拡張も可能です。
図 9: AUTOSAR 4.3 対応の MICROSAR.FlexRay モジュール
5.1 機能概要
> AUTOSAR 4.x および 3.x に対応
> パーシャルネットワークの状態に応じてパーシャルネットワークを有効/無効にし、データを提供
> FlexRay インターフェイスのジョブリスト管理を最適化し、コードサイズを縮小、実行時間を短縮
> FrTp (AUTOSAR) または FrisoTp (ISO 10681) どちらかのトランスポートプロトコルを使用可能
> FlexRay State Manager で ECU パッシブモードをサポート
> 同期ずれを早期検出
5.2 適用分野
MICROSAR.FR は、パーシャルネットワークを含む FlexRay ネットワーク通信の処理に使用されます。また、XCP でのキャリブレーション、ゲー
トウェイ、フラッシングの基盤としても適しています。
5.3 モジュールおよびアドオン
MICROSAR.FR のベーシックソフトウェアモジュールには AUTOSAR 4.x で定義されている機能が含まれており、AUTOSAR 3.x を補足するも
のとして FrisoTp が提供されています。
> FrIf – FlexRay Interface
FrIf モジュールは、FlexRay ハードウェアに対する、抽象化された(PDU ベースの)アクセスを提供します。さらに、FlexRay のグローバル
タイムとの同期もサポートします。

MICROSAR
21
AUTOSAR 標準からの拡張
> CancelTransmit および L-PDU 再設定 API のサポート
> 冗長フレームを送信するためのチャネルの二重化と、ソフトウェアコンポーネントに対する PDU 固有の多数決判定機能
> プリコンパイルによる最適化(シングルチャンネルシステムの場合など)
> FrNm – FlexRay Network Management
FrNm モジュールは FlexRay でのネットワークマネジメントを担当します。これはバスのスリープ状態への移行を同期します。
AUTOSAR 標準からの拡張
> プリコンパイルによる最適化(シングルチャンネルシステムの場合など)
> FrSm – FlexRay State Manager
FrSM モジュールは FlexRay クラスター内のノードのウェイクアップと起動を制御およびモニターします。
AUTOSAR 標準からの拡張
> ECU パッシブモードのサポート、パッシブウェイクアップ後の即時起動、State Change Notification によるエラー処理の拡張、パッシブ
ウェイクアップ時の FlexRay 起動待機時間の設定が可能、ウェイクアップパターン数の設定が可能
> FrTP – FlexRay Transport Protocol
FrTp は FlexRay のトランスポートプロトコルで、ISO 10681-2 標準規格に基づいています。
AUTOSAR 標準からの拡張
> プリコンパイルによる最適化(シングルチャンネルシステムの場合など)
> FrArTp – FlexRay AUTOSAR Tranport Protocol
FrArTp は FlexRay のトランスポートプロトコルです。これは ISO 15765-2 (CanTp) に基づいており、CAN バスとのフレーム互換性が含
まれています。
> FrTSyn – Time Sync Over FlexRay
FrTSyn モジュールは、FlexRay 固有の時間同期プロトコルを実現します。同期されているタイムベースに SWC がアクセスするには、
Synchronized Time-Base Manager (StbM) が必要です。
AUTOSAR 標準からの拡張
> Time Synchronization over FlexRay (FRTSYN) は、Time Synchronization over FlexRay (FRTSYN) は、FlexRay のための時
間同期プロトコルを実装します。これによって AUTOSAR のグローバル時間のコンセプトの一部として FlexRay ECU 間のクロック同期が
可能になります。高レベルの時間コーディネーターには MICROSAR.SYS の Synchronized Time-Base Manager (STBM) ベーシッ
クソフトウェアモジュールを利用できます
> FrXcp – FlexRay XCP Module
FrXcp モジュールには、XCP モジュール(Xcp)の FlexRay 固有の内容が含まれています。
5.3.1 クロスパッケージのアドオン
アドオンの中には複数のパッケージに影響を与えるものもあります。以下にその詳細を示します。
> MICROSAR.IDM – Identity Manager:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
> MICROSAR.PBL – Post Build Loadable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
5.4 オペレーティングシステム
FlexRay のベーシックソフトウェアモジュールは、オペレーティングシステムがなくても問題なく使用することができます。ただし、AUTOSAR OS ま
たは従来の OSEK-OS(ベクターの osCAN など)の使用を推奨します。ベクターの MICROSAR.OS は、FlexRay アプリケーションに最適です。
5.5 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。

MICROSAR
22
5.6 その他の FlexRay 通信スタック用 MICROSAR 製品
AUTOSAR アーキテクチャーに基づいた FlexRay 用通信スタックは、MICROSAR.FR および別途入手可能な MICROSAR.COM、
MICROSAR.MCAL、MICROSAR.SYS、MICROSAR.EXT の各パッケージのベーシックソフトウェアモジュールで構築されています。
MICROSAR.FR をアプリケーションやハードウェアと接続させるには、以下のベーシックソフトウェアモジュールも必要です。
> MICROSAR.MCAL のハードウェア固有 FlexRay ドライバー(Fr)
> MICROSAR.EXT のハードウェア固有トランシーバー制御(FrTrcv)
> MICROSAR.COM の汎用通信モジュール(Com、Nm、PduR、IpduM)
MICROSAR.MCAL および MICROSAR.EXT のモジュールは、各種マイクロコントローラーやトランシーバーに対応しています。
5.7 FlexRay ECU 開発用ベクターツールチェーン
図 10: ベクターは、FlexRay プロジェクトに適した豊富な製品ラインナップと各種サービスを提供しています

MICROSAR
23
6 MICROSAR.LIN – LIN 通信用 AUTOSAR ベーシックソフトウェアモジュール
MICROSAR.LIN には、AUTOSAR アーキテクチャーに定義されている LIN 通信用のベーシックソフトウェアモジュール Linif、LinSM、LinNmが含まれています。AUTOSAR に基づき、LinTp は LinIf の 1 コンポーネントになっています。LIN 通信スタックの中にはトランスポートプロトコ
ルを必要としないものもあるため、LIN トランスポートプロトコルはオプションとして提供されています。MICROSAR.LIN Master 用の Xcp も、
ASAM 拡張機能として用意されています。AUTOSAR バージョン 4.4 では、LIN をマスターかスレーブとして利用できるようになりました。
図 11: AUTOSAR 4.3 対応の MICROSAR.LIN モジュール
6.1 機能概要
> AUTOSAR 4.x および 3.x に対応
> 便利な拡張機能を多数搭載
> マルチチャンネルのマスターに対するスケジューリングのジッターを最小化
> 診断要求の LIN スレーブへのルーティングを最適化
> LIN チャンネルのクイックスタート
> スケジュールテーブルの切替えに高い信頼性を実現
> LIN ソフトウェア開発に関するベクターの長年の経験を活用
6.2 適用分野
MICROSAR.LIN は、LIN ネットワークにおける LIN マスターの通信タスクを処理するのに使用されます。また、ゲートウェイやフラッシングの基
盤としても使うことができます。
6.3 モジュールおよびアドオン
MICROSAR.LIN のベーシックソフトウェアモジュールには、AUTOSAR 4.x で定義されている機能が含まれています。
> LinIf – LIN Interface

MICROSAR
24
LinIf モジュールは、LIN ハードウェアに対する、抽象化された(PDU ベースの)アクセスを提供します。また、スケジュールテーブルの処理
も行います。このモジュールはマスターまたはスレーブとして利用できます。
AUTOSAR 標準からの拡張
> 設定可能なウェイクアップ遅延
> LINIF および LINTP の設定データのメモリーマッピングの個別設定が可能。これは、セグメント化したメモリーがあるコントローラーにとっ
ては特に有効な機能です
> スケジュールテーブル終了の通知
> マルチチャンネルシステムでのタスクの最大実行時間を短縮するための設定可能なスケジュールテーブル
> LIN トランシーバーによるウェイクアップ。この機能により、外部からのウェイクアップの後、マスターによる 2 番目の(不要な)ウェイクアッ
プパルスを除外できます
> LinNm – LIN Network Management
LinNm モジュールには、LIN ネットワークの通常動作とバススリープモードの切替えを調整する、ハードウェアに依存しないプロトコルが含
まれています。AUTOSAR バージョン 4.4 では、LinNm はマスターとしてのみ利用できます。LIN スレーブは LinNm を使用しなくなりまし
た。
> LinSM – LIN State Manager
LinSM モジュールは Com モジュール内のスケジュールテーブルと PDU グループを切り替え、スリープおよびウェイクアップに関するサー
ビスを LIN インターフェイスに提供します。このモジュールはマスターまたはスレーブとして利用できます。
AUTOSAR 標準からの拡張
> インターフェイスを拡張し、LIN スケジュールテーブルの切替えを管理する LinSM サブモードを監視
> スケジュールテーブルの自動選択により、起動時の挙動を最適化(設定可能)
> LinTp – Vector LIN Transport Protocol
LinTp モジュールは、送信データのセグメント化、受信データの収集、データストリームのモニタリングを担当します。AUTOSAR 仕様に基づ
き、LinTp は LinIf の 1 コンポーネントになっています。このモジュールはマスターまたはスレーブとして利用できます。
6.3.1 AUTOSAR 標準から拡張したベクターモジュール
> vLinXcp– Vector LIN XCP Module
vLinXcp モジュールには、XCP モジュール(Xcp)の LIN 固有の内容が含まれています。
6.3.2 クロスパッケージのアドオン
アドオンの中には複数のパッケージに影響を与えるものもあります。以下にその詳細を示します。
> MICROSAR.IDM – Identity Manager:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
> MICROSAR.PBL – Post Build Loadable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
6.4 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
6.5 その他の LIN 通信スタック用 MICROSAR 製品
AUTOSAR アーキテクチャーに基づいた LIN 用の完全な通信スタックは、MICROSAR.LIN および別途入手可能な MICROSAR.COM、
MICROSAR.MCAL、MICROSAR.EXT の各パッケージのベーシックソフトウェアモジュールで構成されています。MICROSAR.LIN をアプリケ
ーションやハードウェアと接続させるには、以下のベーシックソフトウェアモジュールも必要です。
> MICROSAR.MCAL のハードウェア固有 LIN ドライバー(Lin)
> MICROSAR.EXT のハードウェア固有トランシーバー制御(LinTrcv)
> MICROSAR.COM の汎用通信モジュール(Com、PduR)
MICROSAR.MCAL および MICROSAR.EXT のモジュールは、各種マイクロコントローラーやトランシーバーに対応しています。
MICROSAR
25
6.6 その他の LIN 用 MICROSAR 関連製品
> MICROSAR.SYS の DET、ECUM、COMM
> MICROSAR XCP により、ASAM XCP に準拠した測定とキャリブレーションが可能になります。このモジュールは CANoe.XCP および
CANoe.AMD に加え、CANape との併用に特化して最適化されています。LIN ECU 用として、MICROSAR XCP には関連する vLinXcpトランスポートレイヤーが含まれています。XCP-on-LIN は公式には定義されていないため、この XCP-on-LIN 実装は ASAM 規格に対応
したベクターの拡張機能となっています
> MICROSAR XCP は AUTOSAR 仕様の枠を超えて、測定オブジェクトの汎用的な読出しをサポートします。そのため、A2L ファイルでのア
ドレスの定義や更新は不要です。あらゆるバージョンおよびバリアントからのデータを、MCU ビルドから独立して、A2L ファイルを用いて抽
出できます。汎用読出し機能の使用には、XCP ツールとして CANoe.AMD または CANape を使用する必要があります
> VX1000If:安全上の理由から、量産プロジェクトではほとんどの場合、測定やキャリブレーションのインターフェイスを有効のままにしておくこ
とはできません。VX1000If モジュールを使用すると、測定およびキャリブレーションハードウェアである VX1000 のドライバーを、量産時で
も無効化した状態でベーシックソフトウェアに残しておくことができます。検査や開発の際は、API を通じてこの VX1000 ドライバーを再び有
効化できます。量産品で使用する場合は、納入時にこのモジュールを MICROSAR.SIP に含めて、このユースケースの承認を受けてくださ
い。ただし、VX1000If 使用時は、量産プロジェクトでもランタイム中に VX1000 ドライバーの有効化はできません
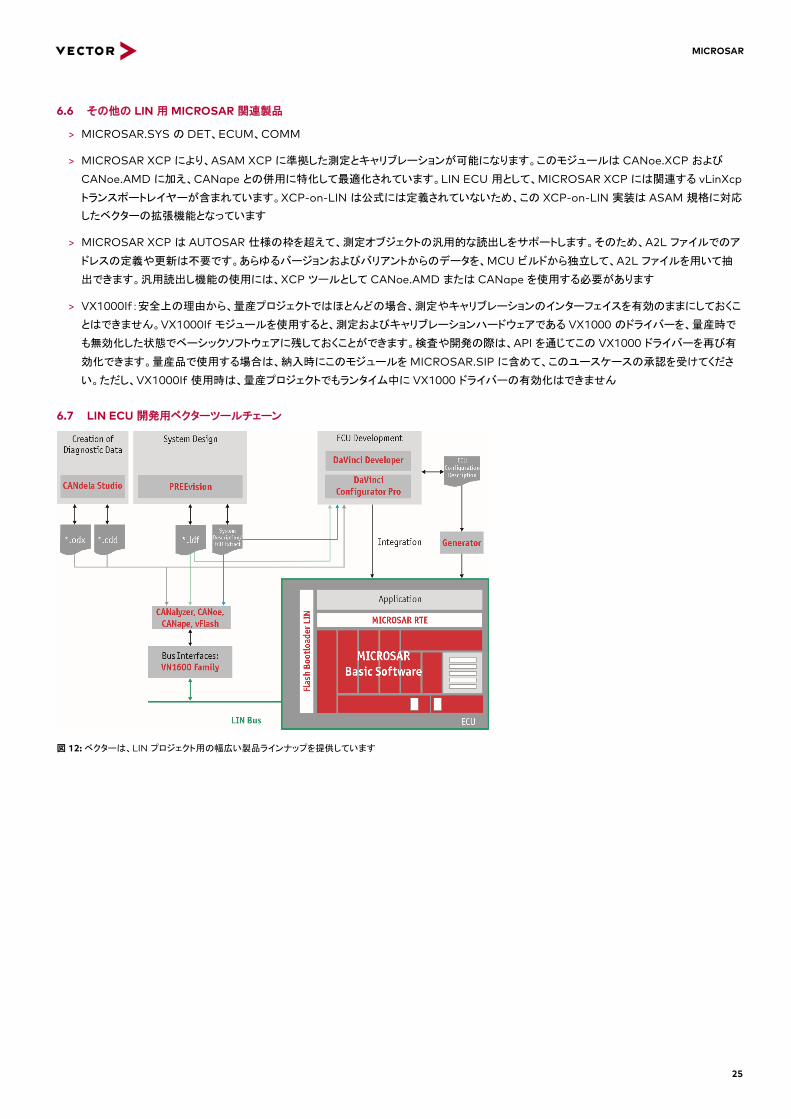
6.7 LIN ECU 開発用ベクターツールチェーン
図 12: ベクターは、LIN プロジェクト用の幅広い製品ラインナップを提供しています

MICROSAR
26
7 MICROSAR.ETH – Ethernet 通信用 AUTOSAR ベーシックソフトウェアモジュール
Internet Protocol とその上位層にある UDP および TCP の両トランスポートプロトコルは、Ethernet を介した高速データ交換を目的として、極
めて幅広く使われている規格です。
MICROSAR.ETH (Ethernet) パッケージには、ECU 間の Ethernet 通信に関する自動車用規格に準拠して開発された TCP/IP スタックをは
じめとする AUTOSAR ベーシックソフトウェアモジュールが含まれています。AUTOSAR 4.0 は、Ethernet を初めてネットワークテクノロジーとし
て規定したバージョンです。AUTOSAR 4.1 では、この仕様が大幅に加筆修正されました。AUTOSAR 4.2 ではさらに、Ethernet スイッチの設
定や ECU 間の時間同期などが明記されています。MICROSAR.ETH のベーシックソフトウェアモジュールは、AUTOSAR 4.x に対応し、さらに
AUTOSAR 3.x を補足するものとして提供されています。
図 13: AUTOSAR 4.3 対応の MICROSAR.ETH モジュール
7.1 MICROSAR.ETH の機能概要
> ベーシックソフトウェアモジュールは AUTOSAR 4.x およびベクターの拡張機能で使用可能
> TCP/IP スタックは自動車用規格に準拠して開発され、IETF の適合性は、サードパーティー製 OPEN ALLIANCE TC8 テストで定期的に証
明
> オープンソースソフトウェアは不使用
> Vehicle-to-Grid 通信(MICROSAR V2G)や Audio/Video Bridging (MICROSAR AVB) などを AUTOSAR Ethernet および
TCP/IP スタックにシームレスに統合
> お客様固有の機能/モジュールをあらゆるレベルでシンプルに統合
7.2 適用分野
MICROSAR.ETH を組み込んだ ECU をサーバーとし、従来の PC または診断テスターをクライアントとした構成により、以下が可能になります。
> ISO 13400-2 (DoIP) に準拠した車両診断
> 迅速かつ並行した ECU の再プログラミング
MICROSAR
27
Ethernet のデータスループットが上がれば、ソフトウェアのダウンロードと診断の総所要時間も大幅に短縮されます。車内にゲートウェイが置か
れていれば、それを使用して診断リクエストを車載ネットワークにルーティングできます。これによって、たとえば複数の CAN ECU を、DoIP 経由
で並行して再プログラミングすることが可能となります。MICROSAR.ETH は他の MICROSAR パッケージと連携して、これに必要になるゲートウ
ェイ機能を実装します。フラッシュブートローダー(FBL)で MICROSAR.ETH を使用していれば、Ethernet ネットワークに相互接続されている
ECU(ゲートウェイ本体など)を DoIP 経由で直接再プログラミングできます。
Ethernet ECU の測定およびキャリブレーション用に提供される MICROSAR XCP on Ethernet を使用すれば、帯域幅を余裕を持って利用で
きるようになります。XCP ルーティングによりゲートウェイが拡張され、CAN および FlexRay の ECU も(車載)Ethernet ポート経由で XCP に
より測定することが可能になります。
MICROSAR.ETH は、診断、測定、キャリブレーションなどの適用分野で、外部インフラストラクチャーと車両を結ぶ Ethernet ベースの通信を可
能にするだけでなく、車内の Ethernet ネットワークを効率的に利用することも可能にします。「IP を介するスケーラブルなサービス指向のミドルウ
ェア(Scalable service oriented middleware over IP)」、すなわち SOME/IP を使用すれば、たとえばデータをサービス指向で送信すること
ができます。これには、AUTOSAR 4.1.1 で導入された、サービス管理のための Service Discovery ベーシックソフトウェアモジュール(SD)の使
用が必要になります。サービス指向のほかに、SOME/IP ではデータの動的なシリアル化が可能です。この実装は RTE トランスフォーマーとして
提供されています。SOME/IP トランスフォーマーについて詳しくは、MICROSAR.RTE および MICROSAR.COM の各章をご覧ください。
Ethernet 上でのシグナルベースおよび PDU ベースのデータ送信ももちろん可能です。
MICROSAR.ETH の一部は、Vehicle-to-Grid 通信や Audio/Video Bridging の基盤としても機能します。これらの適用分野について詳しくは、
MICROSAR V2G および MICROSAR AVB の各セクションをご覧ください。
7.3 機能
以下に示す MICROSAR.ETH のベーシックソフトウェアモジュールには、AUTOSAR 4.1.x で定義されている機能が含まれています。
AUTOSAR 4.0 または AUTOSAR 3.x ソフトウェアスタックで使用できるよう、これらには適切な互換インターフェイスが用意されています。
> EthIf – Ethernet Interface
Ethernet Interface (ETHIF) は、Ethernet ドライバー(ETHDRV)と Ethernet トランシーバードライバー(ETHTRCV)に対する、ハード
ウェアの種類に依存しないアクセスを可能にします。AUTOSAR 4.1 より、このモジュールは VLAN の処理も担当しています。Ethernet ス
イッチドライバー(ETHSWTDRV および ETHSWTDRV EXT)のハードウェアに依存しない制御は、AUTOSAR 4.2 より ETHIF に含まれ
ています。
> EthSM – Ethernet State Manager
Ethernet State Manager (ETHSM) は、Ethernet クラスターで通信を起動または終了するための、Communication Manager (COMM) に対する抽象化されたインターフェイスを提供します。ETHSM は ETHIF を介して Ethernet ハードウェアにアクセスします。
> EthTSyn - Time Sync Over Ethernet
Time Synchronization over Ethernet (ETHTSYN) は、IEEE 802.1AS に準拠した Ethernet のための時間同期プロトコルを実装しま
す。これによって AUTOSAR のグローバル時間のコンセプトの一部として Ethernet ECU 間のクロック同期が可能になります。 高レベルの
時間コーディネーターには MICROSAR.SYS の Synchronized Time-Base Manager (STBM) ベーシックソフトウェアモジュールを利用
できます。
> 必要なすべてのハードウェアインターフェイスの初期化
> Ethertype が 0x88F7 の Ethernet フレームを ETHIF から ETHTSYN にルーティング
> gPTP (Generalized Precision Time Protocol) と AUTOSAR の拡張のサポート
> 一般メッセージとイベントメッセージのサポート
> Pdelay_Req、Pdelay_Resp、Pdelay_Resp_Follow_Up といった伝播遅延時間の計算のサポート
> Sync、Follow_Up などの同期タイムスタンプの転送のサポート
> SOAD – Socket Adapter
Socket Adapter (SOAD) は、AUTOSAR で定義されている PDU 単位の通信をソケット指向の通信に変換します。AUTOSAR 4.0 では、
SOAD には ISO 13400-2 で定義されている診断機能(DoIP)も含まれています。AUTOSAR 4.1 ではこのプラグインは切り離され、独立
したモジュールとして規定されています(DOIP)。さらに、SOAD には XCP ルーティング用の拡張が実装されています。
「SOAD (BSD)」アドオンを使用すれば、SOAD とその上位層のモジュールを、Linux などの非 AUTOSAR 環境でも使用できるようになり
ます。
> DoIp – Diagnostic over IP
MICROSAR
28
Diagnostics over IP (DOIP) モジュールは AUTOSAR 4.1.1 で有効になったモジュールで、これにはこれと同じ名前の、ISO 13400-2に準拠した診断機能が含まれています。AUTOSAR 4.0.3 以前は、この機能は SOAD の一部でした。
> TCPIP – Transmission Control Protocol/Internet Protocol
このモジュールには、UDP および TCP ベースの通信で利用されるプロトコルが含まれており、IPv4 と IPv6、さらに両方を 1 つの ECU で
パラレルに動作させることをサポートしています。プロトコルには以下がございます。
> UDP および TCP
車外の外部インフラストラクチャーとの通信などのユースケースでは、状況により TCP/IP スタックに追加の機能が必要になる場合がありま
す。そのため、MICROSAR の TCPIP モジュールは、AUTOSAR 仕様の枠を越えた機能を備えて、このようなシナリオに対応しています。
TCPIP モジュールには、AUTOSAR 4.2 での Ethernet スイッチのサポートと併せて、スイッチポートに基づいて IP アドレスを割り当てる
DHCPv4 サーバーが追加されました。この DHCPv4 サーバーは TCP/IP アドオンとして使用可能です。
アドオン
TCPIP を機能させるには、以下のアドオンが少なくとも 1 つ必要です。
> TCPIP v4:IPv4、ICMPv4、ARP、DHCPv4(クライアント)
> TCPIP v6:IPv6、ICMPv6、NDP、DHCPv6(クライアント)
> vIpSec – Vector Ethernet Security:詳細については、「MICROSAR Security」の章を参照してください
> SD – Service Discovery
Service Discovery (SD) は、AUTOSAR 4.1.1 で初めて規定されたものです。ECU はこのモジュールによって実装されるプロトコルを介し
て、自身のサービスの利用可能性を通信相手に伝えます。さらに、シグナル更新時などに自動通知を受信するために ECU はそのようなサ
ービスを登録できます。
> UdpNm – UDP Network Management
UDP (UDPNM) 経由でのネットワークマネージメントにより、Ethernet ECU のスリープ同期を実装できます。
7.3.1 AUTOSAR 標準から拡張したベクターモジュール
> vEtm – Vector Ethernet Testability Module
Ethernet Testability Module (vEtm) は、プロトコルのコンフォーマンステストに使用される、標準化されたテストモジュールです。このモ
ジュールにより、外部接続されたテスト環境で、UDP パッケージの送信や TCP 接続の作成といった所定のアクションをトリガーできます。
vEtm モジュールは AUTOSAR 4.3 で規定されており、現在は拡張機能として用意されています。
> vEthFw – Vector Ethernet Firewall
詳細については、「MICROSAR Security」の章を参照してください。
> vTls (Client) – Vector Transport Layer Security
詳細については、「MICROSAR Security」の章を参照してください。
> vEap – Vector ECU Authentication Protocol
vEap モジュールは IEEE 802.1X に準拠した認証を実装します。
7.3.2 クロスパッケージのアドオン
アドオンの中には複数のパッケージに影響を与えるものもあります。以下にその詳細を示します。
> MICROSAR.PBL – Post Build Loadable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
7.4 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
Ethernet および TCP/IP 固有の設定パラメーターは、AUTOSAR 3.x の「ECU Configuration Description (ECUC)」の拡張として保存され
ます。これは AUTOSAR 4.x 内で規定されていない設定パラメーターについても同様です。

MICROSAR
29
7.5 その他の MICROSAR 関連製品
MICROSAR.ETH に、別途入手可能な MICROSAR.MCAL と MICROSAR.EXT のベーシックソフトウェアモジュールを併用することにより、
AUTOSAR アーキテクチャーに基づいた Ethernet および TCP/IP 用の完全な通信スタックを構成できます。
> MICROSAR.ETH をハードウェアと接続させるには、以下のベーシックソフトウェアモジュールも必要です
> ハードウェア固有 Ethernet ドライバー(MICROSAR.MCAL の ETHDRV)
> ハードウェア固有トランシーバードライバー(MICROSAR.EXT の ETHTRCV)
> オプション:ハードウェア固有 Ethernet スイッチドライバー(MICROSAR.MCAL の ETHSWTDRV および MICROSAR.EXT の
ETHSWTDRV EXT)
> MICROSAR.MCAL および MICROSAR.EXT のモジュールは、数多くのマイクロコントローラーやトランシーバーに対応しています
> PDU を AUTOSAR スタックの他のソフトウェアモジュールに渡す必要がある場合は、ほとんどのユースケースで MICROSAR.COM パッケ
ージの PDU Router (PDUR) モジュールも必要になります
> 以下に示す MICROSAR.SYS パッケージのモジュールは、Ethernet スタックや TCP/IP スタックの制御に使用できます
> COMM:通信スタックの起動と終了を制御する際の中心となるモジュール
> NM:ネットワークマネージメントを制御する際の中心となるモジュール
> BSWM:サービスディスカバリーのためのモード管理モジュール
> STBM:異なるネットワークとバスシステムの間の時間同期に使用される、高レベルの時間コーディネーター
> DET:開発期間中にエラーを検出および評価
> DEM:検出されたシステムイベント(エラーおよび環境データ)は、MICROSAR.DIAG パッケージの DEM モジュールを使用して管理できます
> MICROSAR XCP により、ASAM XCP に準拠した測定とキャリブレーションが可能になります。モジュールは CANoe.XCP および
CANoe.AMD に加え、CANape との併用に特化して最適化されています。Ethernet ECU 用として、MICROSAR XCP には関連する
ETHXCP トランスポートレイヤーが含まれています
> VX1000If:安全上の理由から、量産プロジェクトではほとんどの場合、測定やキャリブレーションのインターフェイスを有効のままにしておくこ
とはできません。VX1000If モジュールを使用すると、測定およびキャリブレーションハードウェアである VX1000 のドライバーを、量産時で
も無効化した状態でベーシックソフトウェアに残しておくことができます。検査や開発の際は、API を通じてこの VX1000 ドライバーを再び有
効化できます。量産品で使用する場合は、納入時にこのモジュールを MICROSAR.SIP に含めて、このユースケースの承認を受けてくださ
い。ただし、VX1000If 使用時は、量産プロジェクトでもランタイム中に VX1000 ドライバーの有効化はできません
> Vehicle-to-Grid のアプリケーションには MICROSAR V2G パッケージのモジュールで対応できます。同じく、Audio/Video Bridging に
用いられる MICROSAR AVB のモジュールも、MICROSAR.ETH に基づいて構築されています
7.6 その他の Ethernet 用関連製品
CANoe のオプション、「.Ethernet」を使用すれば、既存の CANoe インストール環境を手軽に拡張し、Ethernet 通信を解析およびシミュレーシ
ョンする機能を追加できます。
ハードウェアインターフェイスには、物理レイヤーに 100BASE-T1(以前は BroadR-Reach®)を使用する場合は特に、VN5610 ネットワークイン
ターフェイスのご利用を推奨します。これには 2 つの Ethernet チャンネル(100BASE-T1 または 100BASE-TX/1000BASE-T で個別に設定
可能)のほか、2 つの High-Speed CAN チャンネルも装備されています。VN5640 はさらに多くの Ethernet 接続を使用するテストおよびシミュ
レーションに最適です。これは 16 個の Ethernet チャンネル(100BASE-T1 が 12 個、100BASE-TX/1000BASE-T が 4 個)を搭載し、非常
に柔軟な設定が可能です。
MICROSAR
30
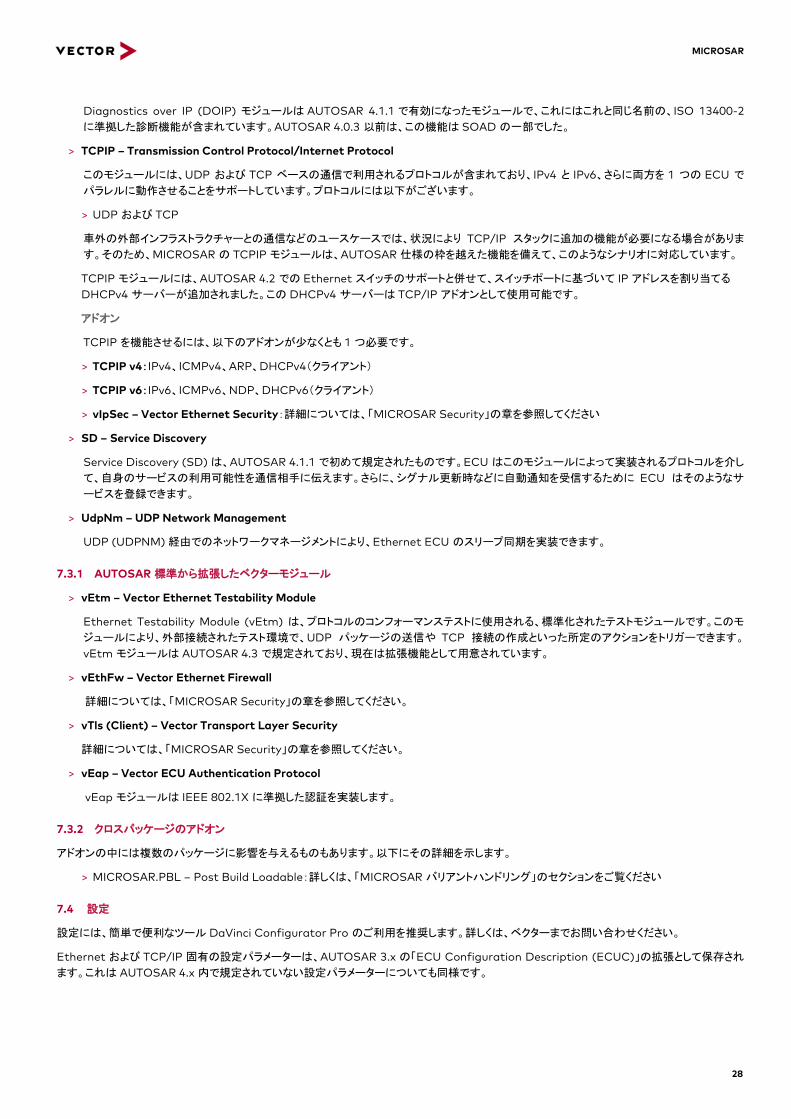
7.7 Ethernet ECU 開発用ベクターツールチェーン
図 14: ベクターは、Ethernet プロジェクト用の幅広い製品ラインナップを提供しています

MICROSAR
31
8 MICROSAR.CHARGE – 外部インフラ通信用 AUTOSAR ベーシックソフトウェアモジュール
MICROSAR.CHARGE パッケージには、電気自動車およびハイブリッド自動車のインテリジェント充電と、HTTP などのインターネットテクノロジ
ーを介したインフラストラクチャーとの通信に用いられるベーシックソフトウェアモジュールが含まれています。このパッケージに含まれているモジュ
ールはいずれも、AUTOSAR では規定されていません。ただし、これらはベクターの AUTOSAR ソリューションに統合されています。これらの拡
張機能は、AUTOSAR 4.x と AUTOSAR 3.x の両方を対象として提供されています。MICROSAR.CHARGE の基盤としては、
MICROSAR.ETH パッケージのモジュールが必要になります。
図 15: AUTOSAR 4.3 対応の MICROSAR.CHARGE モジュール
8.1 MICROSAR.CHARGE の機能概要
> Smart Charging Communication (vScc) に必要なすべてのプロトコルを実装
> インターネットのメカニズムおよびプロトコルを介した通信をサポート
> すべてのベーシックソフトウェアを AUTOSAR 環境にシームレスに統合
> 汎用インターフェイスにより、お客様固有の機能の組込が容易
8.2 適用分野
MICROSAR.CHARGE を使用すれば、電気自動車とハイブリッド自動車に、適切な充電ステーションでインテリジェント充電を実行できます。対
応する規格は以下の通りです。
> ISO 15118
> DIN SPEC 70121
> CHAdeMO
> GB/T 27930
これらには、交流または直流(AC/DC)、非接触充電(WPT)、自動接続(ACD)、双方向給電(BPT)での充電に対応するオプションが必要です。

MICROSAR
32
MICROSAR.CHARGE パッケージのモジュールを使用すれば、一般的に使われているインターネットプロトコルを介して、ECU にサーバーと通
信させることもできます。
必要に応じて、TLS を用いてこの通信を暗号化することもできます。
8.3 AUTOSAR 標準から拡張したベクターモジュール
MICROSAR.CHARGE には、以下のベーシックソフトウェアモジュールが含まれています。
> vDns – Vector Domain Name System Resolver
vDns モジュールには DNS リゾルバーが含まれています。これにはたとえば vector.com などのドメインを、有効な IP アドレスに解決する
役割があります。
> vHttp – Vector Hypertext Transfer Protocol
Hypertext Transfer Protocol のアプリケーションの 1 つとして、サーバーへのブラウザー要求の送信が挙げられます。このモジュールに
は HTTP クライアントが含まれています。
> vXmlSecurity – Vector XML Security
このモジュールは、W3C XML Security 規格に基づいて EXI 形式でエンコードされるデータに添付する XML シグネチャーを生成したり、
添付済みの XML シグネチャーを検証したりします。この機能は ISO 15118 に準拠した「Plug and Charge」を使用する場合に必要です。
> vExi – Vector Efficient XML Interchange
vExi モジュールは XML ドキュメントを解釈し、それらをバイナリー形式に変換するのに使用されます。これによって、ファイルの処理と伝送
の効率が高まり、通信帯域幅を節約できます。
> vScc – Vector Smart Charging Communication
このモジュールが担当するのは ISO 15118 および DIN SPEC 70121 に準拠した Smart Charging Communication です。
アドオン
> AC:交流での充電
> DC:直流での充電
> ACD:Automatic charging device(パンタグラフ充電)
> WPT:Wireless power transfer(非接触充電)
> BPT:Bidirectional power transfer(双方向給電)
> <OEM>:<OEM>によって指定されたアプリケーションインターフェイスを提供します
> vCanCcGbt – Vector CAN Charging Communication according to GB/T 27930
このモジュールは中国 EV 急速充電規格 GB/T 27930 の仕様に準拠した直流充電のための充電通信規格に対応しています。こちらの規
格に対応した診断機能のサポートはご要望に応じて開発可能です。
> vCanCcCdm – Vector CAN Charging Communication according to CHAdeMO
このモジュールは CHAdeMO 規格に準拠した直流充電のための充電通信規格に対応しています。
さらに、AUTOSAR 3.x の環境用には以下のモジュールがあります。AUTOSAR 4 はご要望に応じて利用可能です。
> vXmlEngine
vXMLEngine モジュールには、XML 1.0 ドキュメントを処理するためのパーサーと、有効な XML 1.0 ドキュメントを作成するためのジェネ
レーターが含まれています。このモジュールは充電分野で使用されます。
> vJson
このモジュールには JSON パーサーが含まれています。JSON は JavaScript ベースのデータ交換形式で、XML の代わりに使用できま
す。
8.4 設定
MICROSAR.CHARGE パッケージのモジュールは、DaVinci Configurator で設定できます。詳しくは、ベクターまでお問い合わせください。
固有の設定パラメーターは ECU Configuration Description の拡張として保存されます。
MICROSAR
33
8.5 その他の MICROSAR 関連製品
MICROSAR.CHARGE は MICROSAR.ETH パッケージに基づいており、通信の基盤として Ethernet スタックと TCP/IP スタックを必要としま
す。これは以下のモジュールから構成されています。
> 基盤となるハードウェアを抽象化する Ethernet Interface (Ethif)
> Ethernet 通信のオン/オフを切り替える Ethernet State Manager (EthSM)
> TCP/IP スタック(TcpIp)とそれに関連する IP バージョン(IPv4 および IPv6 またはそのいずれか)
この他に、Ethernet ドライバー(Eth (EXT))と、MICROSAR.EXT の Ethernet トランシーバードライバー(EthTrcv)も必要です。これには、
Smart Charging Communication 用として、電力線通信(PLC)専用のドライバーとトランシーバードライバーが用意されています。
Smart Charging Communication の制御を AUTOSAR ソフトウェアコンポーネントで実装する場合は、MICROSAR.RTE および
MICROSAR.CRYPTO のご利用を推奨します。
開発期間中のエラーの検出および評価には、MICROSAR.SYS の DET モジュールが利用できます。
MICROSAR.DIAG パッケージの DEM モジュールは、検出されたシステムイベント(エラーおよび環境データ)を管理するのに使用できます。
8.6 その他の関連製品
スマート充電用の CANoe の関連オプション(CANoe 11 SP3 以降)を使用すれば、既存の CANoe インストール環境を手軽に拡張し、
Ethernet ベースの通信を解析およびシミュレーションする機能を追加できます。また、SCC トラフィックを CANoe で解析することもできます。こ
れによって、車両と充電ステーションの複雑なシミュレーションを、ISO 15118 および DIN SPEC 70121 に基づいてセットアップできます。
ベクターでは、VT システムに対応した電力線通信用のプラグインカードを用意しています。
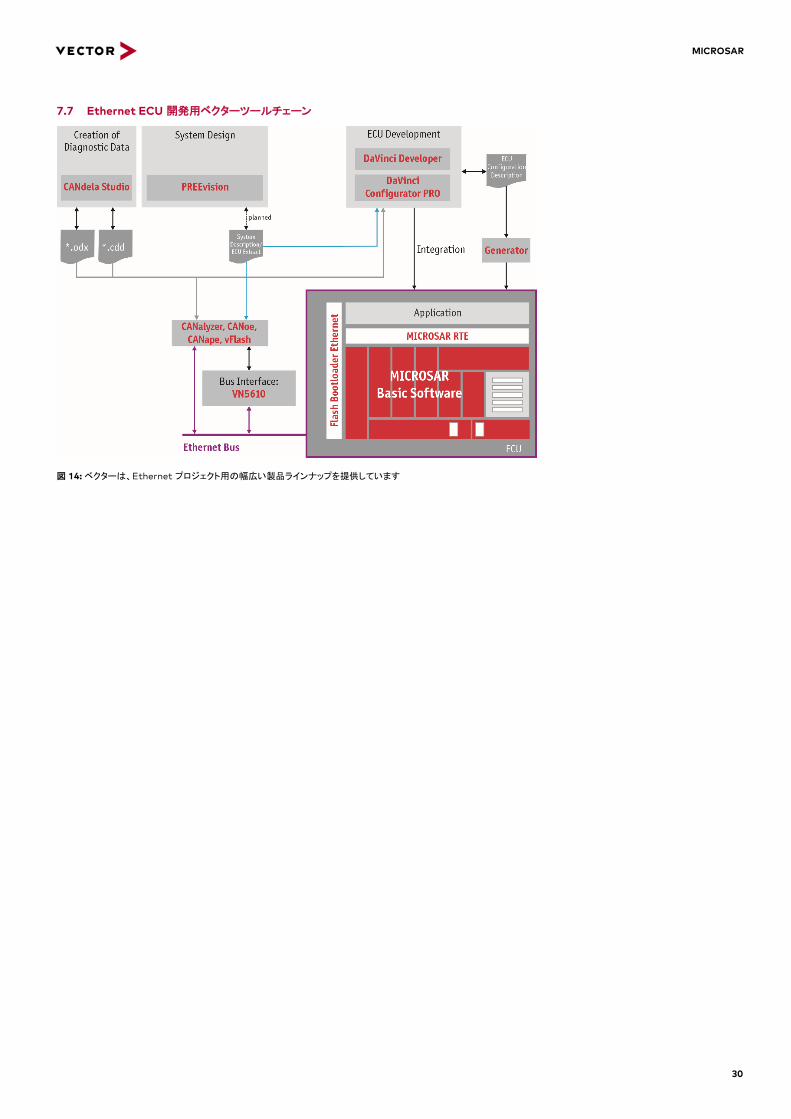
8.7 Ethernet/充電 ECU 開発用ベクターツールチェーン
図 16: ベクターは、Ethernet/充電プロジェクト用の幅広い製品ラインナップを提供しています

MICROSAR
34
9 MICROSAR AVB – Ethernet 経由のオーディオ/ビデオ用のベーシックソフトウェアモジュール
Ethernet 上で MICROSAR AVB (Audio/Video Bridging) を使用することにより、オーディオ/ビデオを迅速かつ確実に転送できるようになり
ます。MICROSAR AVB パッケージには、MICROSAR.ETH などの Ethernet インターフェイスを下敷きとする、多様なベーシックソフトウェアが
含まれています。AUTOSAR 4.x に基づくソリューションは vAvTp (Audio/Video Transport Protocol)、vRtp (Transport Protocol for Real-Time Applications)、vSrp (Stream Reservation Protocol)、EthTSyn (Time Synchronisation over Ethernet) のほか、ご要望に
応じて BMCA (Best Master Clock Algorithm) もサポートします。これによって、AVB エンドポイントだけでなく、ブリッジ機能の実装も可能に
なります。
図 17: AUTOSAR 4.3 対応の MICROSAR AVB モジュール
9.1 MICROSAR AVB の機能概要
> ベーシックソフトウェアモジュールは AUTOSAR 用に最適化されているものの、他の環境にも統合可能
> Ethernet スタックである MICROSAR.ETH に円滑に統合。そのため、AVB、DoIP、TcpIp などの並行利用が可能
> お客様固有の機能やモジュールの組込が容易
> 多数の Ethernet コントローラーをサポート(AVB 固有のハードウェア機能を含む)
> オーディオ、ビデオ、診断などのためのデータを分離し、優先度を設定するための VLAN をサポート
9.2 適用分野
9.2.1 オーディオ/ビデオストリーミング
MICROSAR vAvTp および vRtp により、オーディオ/ビデオデータを、そのタイムスタンプも含めて、異なるエンドポイント間で交換することが可
能になります。vAVTP は 2 層プロトコルであり、これは IEEE 1722/1722a の仕様に従って実装されます。vRtp は UDP に基づいた 3 層プロト
コルであり、IETF RFC 3550 の仕様に従って実装されます。
9.2.2 最も正確なクロックの選択
システム全体に正確なクロックを提示するには、まず、最も正確なクロック(グランドマスター)を持つデバイスを定義しなければなりません。通常、
これは静的に、または BMCA を通じて動的に設定されます。この際、IEEE 802.1AS の仕様が使われます。
MICROSAR
35
9.2.3 同期的なシステムタイムの提示
ネットワークには、最も正確な時間を把握している ECU から時間が配信されます。つまり、すべてのエンドポイントとブリッジが、グランドマスターよ
って指定された同一の時間に従って動作するということです。これによって、A/V データストリームの送信と再生を、時間を同期させて行うことが可
能になります。タイムスタンプを配信するためのプロトコルは IEEE 802.1AS の仕様に従い、AUTOSAR ベーシックソフトウェアモジュールの
EthTSyn によって実装されます。
正確な時間測定を有効にするには、拡張ハードウェアサポートを使用してより高い精度を実現する必要があります。これは Ethernet スイッチドラ
イバーの「Add-On Time Sync」に実装されています。
9.3 AUTOSAR 標準から拡張したベクターモジュール
以下に示す MICROSAR AVB のベーシックソフトウェアモジュールには、上記の IEEE 仕様で定義されている機能が含まれています。また、
AUTOSAR 環境へのシームレスな統合を可能にするソフトウェアプロパティーも必要になります。
> vAvTp – Vector Audio/Video Transport Protocol
vAvTp モジュールは IEEE 1722 で規定されています。AVB ネットワークでは、プレゼンテーションタイムも含めたオーディオ/ビデオデータ
の転送を担当します。
> AVTP フレームを送受信するための、EthIf モジュールへのインターフェイス
> ストリームチャンネルと制御チャンネルの識別
> タイムスタンプの表示と検証
> 伝送されたデータストリームの検出
> vSrp End Station - Vector Stream Registration Protocol End Station
> アドミッション制御によるデータストリームの登録
> すべての AVB ブリッジがストリーム ID ごとに十分な帯域幅を予約できるように保証
> vSrp Bridge - Vector Stream Registration Protocol Bridge
> 異なるエンドステーションからの複数のデータストリームを、アドミッション制御により登録
> Ethernet AVB ネットワーク全体で予約される帯域幅が、事前定義されている上限を超えないことを保証
> vRtp - Vector Real Time Transport Protocol
vRtp モジュールは、ユニキャスト/マルチキャストをサポートするリアルタイム対応のストリーミングプロトコルです。サービス品質(QoS)の監視のための RealTime Control Protocol (RTCP) も含まれています。以下のプロファイルがサポートされています。
> IETF RFC 6184 RTP Payload Format for H.264 Video
> ローカルエリアネットワーク(LAN)における時間依存のアプリケーション向けの IEEE 1733 レイヤー3 トランスポートプロトコル
マルチキャストまたはユニキャストネットワークサービスを介してオーディオ、ビデオ、シミュレーションデータなどのリアルタイムデータを伝送
するアプリケーションに適した、エンドツーエンドネットワークの転送機能を提供します。以下に対応しています。
9.4 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
AVB 固有の設定パラメーターは、「ECU Configuration Description」の拡張として保存されます。
9.5 関連 MICROSAR 製品用インターフェイス
MICROSAR AVB に、別途入手可能な MICROSAR.MCAL、MICROSAR.EXT、MICROSAR.ETH の各パッケージのベーシックソフトウェアモ
ジュールを併用することにより、MICROSAR アーキテクチャーに基づいた車載 AVB 用の完全な通信スタックを構成できます。MICROSAR AVBをハードウェアと接続させるには、以下のベーシックソフトウェアモジュールも必要です。
> ハードウェア固有 Ethernet ドライバー(MICROSAR.MCAL の Eth)
> ハードウェア固有トランシーバードライバー(MICROSAR.EXT の EthTrcv)
> Ethernet ドライバー抽象レイヤーおよびコントロールレイヤー(MICROSAR.ETH の EthIf、EthM)
MICROSAR
36
MICROSAR.MCAL および MICROSAR.EXT 内のモジュールはすでに多くのマイクロコントローラーやトランシーバーに対応していますが、必要
に応じて、新しいマイクロコントローラーやトランシーバー用のモジュールが開発される場合もあります。
9.6 追加の Ethernet 用関連 MICROSAR モジュール
> MICROSAR.ETHDCM の TcpIp、SoAd、DoiP、SomeIp、MICROSAR.DIAG の Dem
> MICROSAR.SYS の Det、EcuM、ComM、Nm
> MICROSAR XCP
9.7 その他の Ethernet 用関連製品
CANoe のオプション、「.Ethernet」を使用すれば、既存の CANoe インストール環境を手軽に拡張し、Ethernet および AVB ベースの通信を解
析およびシミュレーションする機能を追加できます。
物理レイヤーに BroadR-Reach®を使用する場合は特に、VN5610 ネットワークインターフェイスのご利用を推奨します。これには 2 つの
Ethernet チャンネル(BroadR-Reach®または 100BASE-TX で個別に設定可能)のほか、2 つの High-Speed CAN チャンネルも装備されて
います。
9.8 Ethernet/AVB ECU 開発用ベクターツールチェーン
図 18: ベクターは、Ethernet/AVB プロジェクト用の幅広い製品ラインナップを提供しています

MICROSAR
37
10 MICROSAR.MEM – メモリー管理用 AUTOSAR ベーシックソフトウェアモジュール
MICROSAR.MEM パッケージには、メモリー管理に関する AUTOSAR モジュール NvM、MemIf、Ea、Fee がすべて含まれています。これらの
モジュールは、不揮発性メモリー(フラッシュメモリーまたは EEPROM)のデータの管理、チェック、復元をサポートします。MICROSAR.MEM の
ベーシックソフトウェアモジュールは、高速で信頼性が高く、堅牢です。
図 19: AUTOSAR 4.3 対応の MICROSAR.MEM モジュール
10.1 機能概要
> AUTOSAR 4.x および 3.x に対応
> 極めて安全で確実なデータトランザクション
> 効率のよいデータアクセス
> 効率的で堅牢な不揮発性メモリー管理
> 管理データを冗長化してストレージすることにより、データアクセスの信頼性を向上
> メモリースタック全体のモジュール間設定が可能
> プラットフォームに最適化されたメモリースタックソリューションを 1 つの供給元から提供
10.2 適用分野
MICROSAR.MEM には、フラッシュメモリーや EEPROM メモリー内の永続的なアプリケーションデータの読書きや消去を行う AUTOSAR サー
ビスが含まれています。これによって、アプリケーションソフトウェアはハードウェアに依存しないメモリーアクセスを行うことができます。アプリケー
ション側は、プラットフォームに存在するメモリーのタイプが何か、あるいはこのメモリーはコントローラー内部のメモリーなのか、それとも外部メモリ
ーなのかを把握する必要はありません。
10.3 モジュールおよびアドオン
MICROSAR.MEM のベーシックソフトウェアモジュールには、AUTOSAR 4.x で定義されている機能が含まれています。各メモリースタックには、
MICROSAR.MEM のベーシックソフトウェアモジュールの NvM と MemIf が必要です。これらのモジュールは、メモリー領域へのアクセス(ブロ
ック単位、テクノロジー非依存)を処理します。その際、メモリー属性に関する事前情報は要求しません。メモリースタックは使用メモリーに応じて、
他のベーシックソフトウェアモジュールを必要とします。
MICROSAR
38
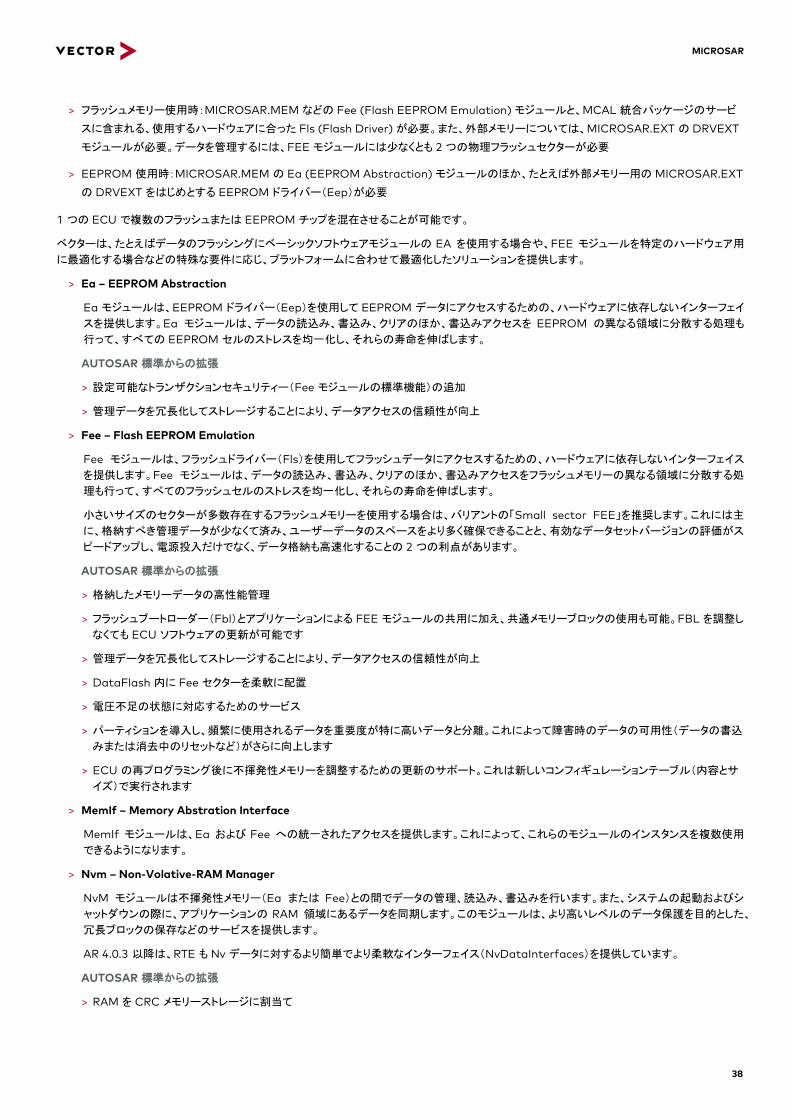
> フラッシュメモリー使用時:MICROSAR.MEM などの Fee (Flash EEPROM Emulation) モジュールと、MCAL 統合パッケージのサービ
スに含まれる、使用するハードウェアに合った Fls (Flash Driver) が必要。また、外部メモリーについては、MICROSAR.EXT の DRVEXTモジュールが必要。データを管理するには、FEE モジュールには少なくとも 2 つの物理フラッシュセクターが必要
> EEPROM 使用時:MICROSAR.MEM の Ea (EEPROM Abstraction) モジュールのほか、たとえば外部メモリー用の MICROSAR.EXTの DRVEXT をはじめとする EEPROM ドライバー(Eep)が必要
1 つの ECU で複数のフラッシュまたは EEPROM チップを混在させることが可能です。
ベクターは、たとえばデータのフラッシングにベーシックソフトウェアモジュールの EA を使用する場合や、FEE モジュールを特定のハードウェア用
に最適化する場合などの特殊な要件に応じ、プラットフォームに合わせて最適化したソリューションを提供します。
> Ea – EEPROM Abstraction
Ea モジュールは、EEPROM ドライバー(Eep)を使用して EEPROM データにアクセスするための、ハードウェアに依存しないインターフェイ
スを提供します。Ea モジュールは、データの読込み、書込み、クリアのほか、書込みアクセスを EEPROM の異なる領域に分散する処理も
行って、すべての EEPROM セルのストレスを均一化し、それらの寿命を伸ばします。
AUTOSAR 標準からの拡張
> 設定可能なトランザクションセキュリティー(Fee モジュールの標準機能)の追加
> 管理データを冗長化してストレージすることにより、データアクセスの信頼性が向上
> Fee – Flash EEPROM Emulation
Fee モジュールは、フラッシュドライバー(Fls)を使用してフラッシュデータにアクセスするための、ハードウェアに依存しないインターフェイス
を提供します。Fee モジュールは、データの読込み、書込み、クリアのほか、書込みアクセスをフラッシュメモリーの異なる領域に分散する処
理も行って、すべてのフラッシュセルのストレスを均一化し、それらの寿命を伸ばします。
小さいサイズのセクターが多数存在するフラッシュメモリーを使用する場合は、バリアントの「Small sector FEE」を推奨します。これには主
に、格納すべき管理データが少なくて済み、ユーザーデータのスペースをより多く確保できることと、有効なデータセットバージョンの評価がス
ピードアップし、電源投入だけでなく、データ格納も高速化することの 2 つの利点があります。
AUTOSAR 標準からの拡張
> 格納したメモリーデータの高性能管理
> フラッシュブートローダー(Fbl)とアプリケーションによる FEE モジュールの共用に加え、共通メモリーブロックの使用も可能。FBL を調整し
なくても ECU ソフトウェアの更新が可能です
> 管理データを冗長化してストレージすることにより、データアクセスの信頼性が向上
> DataFlash 内に Fee セクターを柔軟に配置
> 電圧不足の状態に対応するためのサービス
> パーティションを導入し、頻繁に使用されるデータを重要度が特に高いデータと分離。これによって障害時のデータの可用性(データの書込
みまたは消去中のリセットなど)がさらに向上します
> ECU の再プログラミング後に不揮発性メモリーを調整するための更新のサポート。これは新しいコンフィギュレーションテーブル(内容とサ
イズ)で実行されます
> MemIf – Memory Abstration Interface
MemIf モジュールは、Ea および Fee への統一されたアクセスを提供します。これによって、これらのモジュールのインスタンスを複数使用
できるようになります。
> Nvm – Non-Volative-RAM Manager
NvM モジュールは不揮発性メモリー(Ea または Fee)との間でデータの管理、読込み、書込みを行います。また、システムの起動およびシ
ャットダウンの際に、アプリケーションの RAM 領域にあるデータを同期します。このモジュールは、より高いレベルのデータ保護を目的とした、
冗長ブロックの保存などのサービスを提供します。
AR 4.0.3 以降は、RTE も Nv データに対するより簡単でより柔軟なインターフェイス(NvDataInterfaces)を提供しています。
AUTOSAR 標準からの拡張
> RAM を CRC メモリーストレージに割当て
MICROSAR
39
> データブロックの直接読出しおよび変更用の Dcm 診断モジュール専用インターフェイス
> 設定可能なトランザクションセキュリティー(Fee モジュールの標準機能)の追加
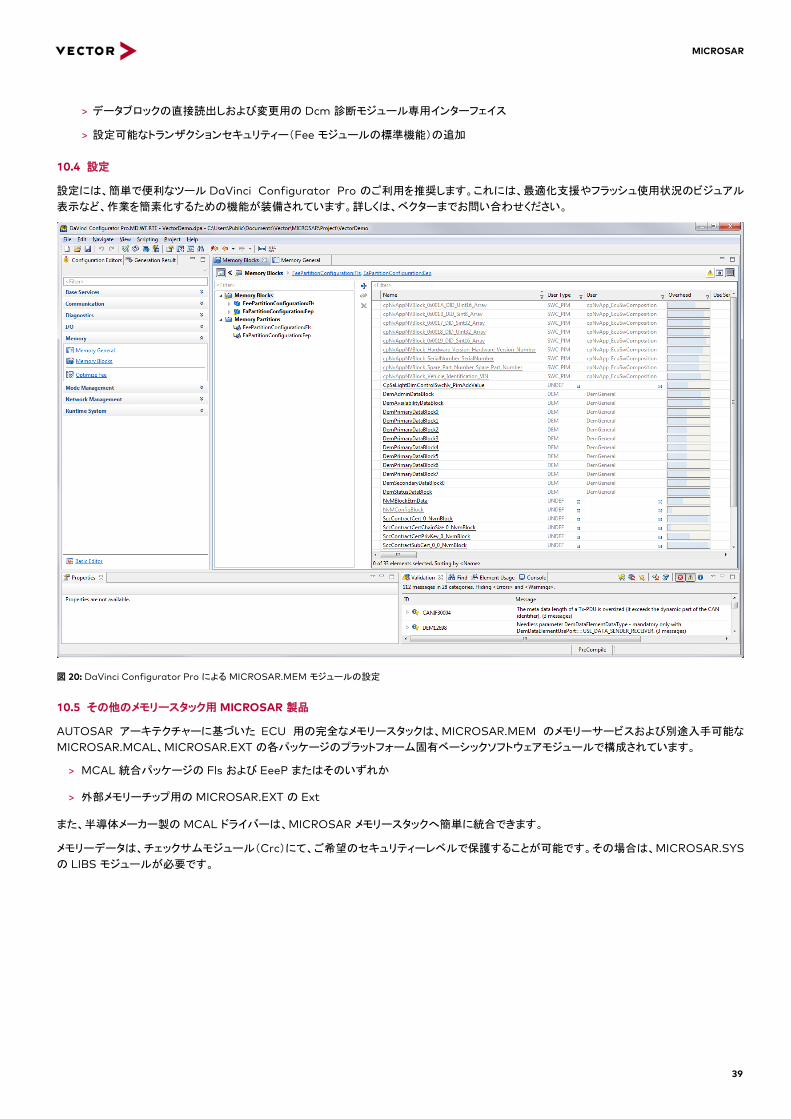
10.4 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。これには、最適化支援やフラッシュ使用状況のビジュアル
表示など、作業を簡素化するための機能が装備されています。詳しくは、ベクターまでお問い合わせください。
図 20: DaVinci Configurator Pro による MICROSAR.MEM モジュールの設定
10.5 その他のメモリースタック用 MICROSAR 製品
AUTOSAR アーキテクチャーに基づいた ECU 用の完全なメモリースタックは、MICROSAR.MEM のメモリーサービスおよび別途入手可能な
MICROSAR.MCAL、MICROSAR.EXT の各パッケージのプラットフォーム固有ベーシックソフトウェアモジュールで構成されています。
> MCAL 統合パッケージの Fls および EeeP またはそのいずれか
> 外部メモリーチップ用の MICROSAR.EXT の Ext
また、半導体メーカー製の MCAL ドライバーは、MICROSAR メモリースタックへ簡単に統合できます。
メモリーデータは、チェックサムモジュール(Crc)にて、ご希望のセキュリティーレベルで保護することが可能です。その場合は、MICROSAR.SYSの LIBS モジュールが必要です。

MICROSAR
40
11 MICROSAR.SYS – AUTOSAR 用のシステム関連のベーシックソフトウェアモジュール
MICROSAR.SYS のベーシックソフトウェアモジュールが提供するサービスは、AUTOSAR ECU の基本機能の重要な部分を取り扱っています。
これらのサービスはアプリケーションソフトウェアから呼び出されるだけではなく(Rte 経由)、他のベーシックソフトウェアモジュールからも呼び出さ
れます。MICROSAR.SYS のモジュールには、ECU の状態処理に用いられる主要機能がすべて含まれています。
図 21: AUTOSAR 4.3 対応の MICROSAR.SYS モジュール
11.1 機能概要
> AUTOSAR 4.x および 3.x に対応
> ECUM モジュールは、リソース効率がよいプリコンパイル、または柔軟性が高いポストビルドのどちらかのコンフィギュレーションバリアントで
組込可能。詳しくは、AUTOSAR 用の Identity Manager のセクションをご覧ください
> DaVinci Configurator Pro の支援機能により、BSWM および ECUM の初期設定が容易
> 初期化シーケンスを作成
> ECU ステートマシンを設定(起動、シャットダウンなど)
> 通信モードの管理
11.2 適用分野
システムサービスには、電源およびモードの管理や、すべての通信チャンネルおよびパーシャルネットワークの制御、機能ソフトウェアを構成する
各個別のソフトウェアコンポーネントのモニターのほか、AUTOSAR 3.x 内の全ベーシックソフトウェアモジュールのスケジューリングを行う機能が
含まれています。
11.3 モジュールおよびアドオン
MICROSAR.SYS のベーシックソフトウェアモジュールには、AUTOSAR 4.x で定義されている機能が含まれています。
> BswM - BSW Module Manager
MICROSAR
41
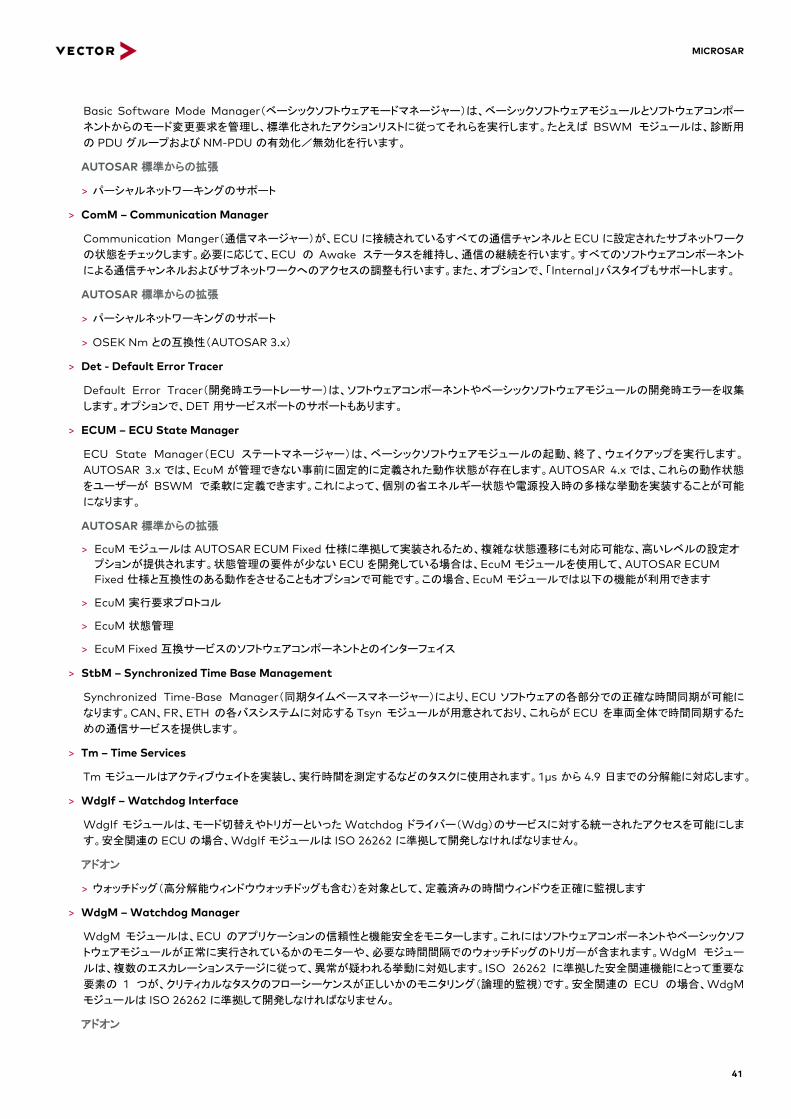
Basic Software Mode Manager(ベーシックソフトウェアモードマネージャー)は、ベーシックソフトウェアモジュールとソフトウェアコンポー
ネントからのモード変更要求を管理し、標準化されたアクションリストに従ってそれらを実行します。たとえば BSWM モジュールは、診断用
の PDU グループおよび NM-PDU の有効化/無効化を行います。
AUTOSAR 標準からの拡張
> パーシャルネットワーキングのサポート
> ComM – Communication Manager
Communication Manger(通信マネージャー)が、ECU に接続されているすべての通信チャンネルと ECU に設定されたサブネットワーク
の状態をチェックします。必要に応じて、ECU の Awake ステータスを維持し、通信の継続を行います。すべてのソフトウェアコンポーネント
による通信チャンネルおよびサブネットワークへのアクセスの調整も行います。また、オプションで、「Internal」バスタイプもサポートします。
AUTOSAR 標準からの拡張
> パーシャルネットワーキングのサポート
> OSEK Nm との互換性(AUTOSAR 3.x)
> Det - Default Error Tracer
Default Error Tracer(開発時エラートレーサー)は、ソフトウェアコンポーネントやベーシックソフトウェアモジュールの開発時エラーを収集
します。オプションで、DET 用サービスポートのサポートもあります。
> ECUM – ECU State Manager
ECU State Manager(ECU ステートマネージャー)は、ベーシックソフトウェアモジュールの起動、終了、ウェイクアップを実行します。
AUTOSAR 3.x では、EcuM が管理できない事前に固定的に定義された動作状態が存在します。AUTOSAR 4.x では、これらの動作状態
をユーザーが BSWM で柔軟に定義できます。これによって、個別の省エネルギー状態や電源投入時の多様な挙動を実装することが可能
になります。
AUTOSAR 標準からの拡張
> EcuM モジュールは AUTOSAR ECUM Fixed 仕様に準拠して実装されるため、複雑な状態遷移にも対応可能な、高いレベルの設定オ
プションが提供されます。状態管理の要件が少ない ECU を開発している場合は、EcuM モジュールを使用して、AUTOSAR ECUM Fixed 仕様と互換性のある動作をさせることもオプションで可能です。この場合、EcuM モジュールでは以下の機能が利用できます
> EcuM 実行要求プロトコル
> EcuM 状態管理
> EcuM Fixed 互換サービスのソフトウェアコンポーネントとのインターフェイス
> StbM – Synchronized Time Base Management
Synchronized Time-Base Manager(同期タイムベースマネージャー)により、ECU ソフトウェアの各部分での正確な時間同期が可能に
なります。CAN、FR、ETH の各バスシステムに対応する Tsyn モジュールが用意されており、これらが ECU を車両全体で時間同期するた
めの通信サービスを提供します。
> Tm – Time Services
Tm モジュールはアクティブウェイトを実装し、実行時間を測定するなどのタスクに使用されます。1µs から 4.9 日までの分解能に対応します。
> WdgIf – Watchdog Interface
WdgIf モジュールは、モード切替えやトリガーといった Watchdog ドライバー(Wdg)のサービスに対する統一されたアクセスを可能にしま
す。安全関連の ECU の場合、WdgIf モジュールは ISO 26262 に準拠して開発しなければなりません。
アドオン
> ウォッチドッグ(高分解能ウィンドウウォッチドッグも含む)を対象として、定義済みの時間ウィンドウを正確に監視します
> WdgM – Watchdog Manager
WdgM モジュールは、ECU のアプリケーションの信頼性と機能安全をモニターします。これにはソフトウェアコンポーネントやベーシックソフ
トウェアモジュールが正常に実行されているかのモニターや、必要な時間間隔でのウォッチドッグのトリガーが含まれます。WdgM モジュー
ルは、複数のエスカレーションステージに従って、異常が疑われる挙動に対処します。ISO 26262 に準拠した安全関連機能にとって重要な
要素の 1 つが、クリティカルなタスクのフローシーケンスが正しいかのモニタリング(論理的監視)です。安全関連の ECU の場合、WdgMモジュールは ISO 26262 に準拠して開発しなければなりません。
アドオン
MICROSAR
42
> Prog.Flow + Deadline Monitoring
ソフトウェアコンポーネントを観察するためのプログラムフローとデッドラインのモニター
AUTOSAR 標準からの拡張
> ウォッチドッグ(高分解能ウィンドウウォッチドッグも含む)を対象として、定義済みの時間ウィンドウを正確に監視します
> Watchdog Manager(ウォッチドッグマネージャー)は、MICROSAR.MCAL の WdgIf と Wdg で、機能ソフトウェアが正常に動作して
いるかをモニターします
11.3.1 クロスパッケージのアドオン
アドオンの中には複数のパッケージに影響を与えるものもあります。以下にその詳細を示します。
> MICROSAR.IDM – Identity Manager:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
> MICROSAR.MC – Multi-Core:詳しくは、「MICROSAR Multi-Core」のセクションをご覧ください
> MICROSAR.PBL – Post Build Loadable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
11.4 ベーシックソフトウェアマネージャー(BswM)
BswM はモード管理の中心となるモジュールで、AUTOSAR 4 の仕様に準拠して実装されています。ただし、この仕様に留まらない便利な機能
が多数装備されているため、これを使用することで、ECU ソフトウェアの設定をさらに快適に行うことができます。
AUTOSAR 4 の BSWM モジュールでは、他のベーシックソフトウェアモジュールのモード変更に対応したり、そのようなモード変更を要求したり
するために、調停規則、論理式、アクションなどを自由に設定できるようになっています。
AUTOSAR で指定されているコンフィギュレーションの構成では、ごく単純な設定にも以下のような多大な相互関連設定が求められます。そのた
め、コンフィギュレーションがまたたく間に複雑化してしまうことがあります。
> アクションをアクションリストにまとめる
> それらのリストを、事前定義済みの論理式の結果(True または False)に規則別にリンクする
> この論理式の本体は、受信されるモード(要求ポート)に基づいた、1 つ以上の条件から構成されている
また、たとえば AUTOSAR 3 の ECUM Fixed 様式に基づいてステートマシンを設定したり、対応するベーシックソフトウェアモジュールの初期化
関数を適切なパラメーターとともに呼び出す、あるいは PDU グループ(I-PDU)のオン/オフを切り替えるといった標準的なタスクも、熟練した開
発者にすら難しいものとなっています。
DaVinci Configurator Pro は、インテリジェントかつ強力な支援機能を通じてユーザーをサポートします。これによって上記のようなタスクの多く
を自動的に解決できるほか、クリックするだけで後からそれらを設定することも可能です。これは以下の場合に特に有効です。
> ECU ステートマシン(ECU 状態処理、下図を参照)
> ベーシックソフトウェアモジュールの初期化(モジュール初期化)
> PDU グループの切替え(通信制御)
MICROSAR
43
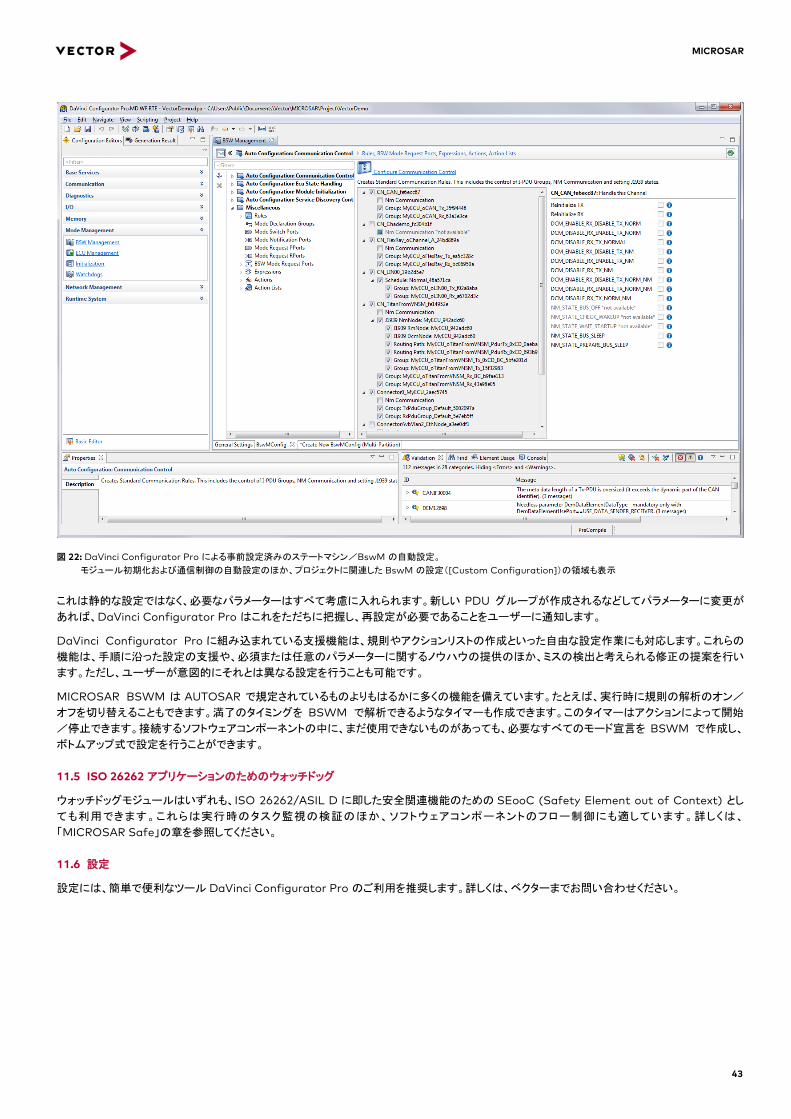
図 22: DaVinci Configurator Pro による事前設定済みのステートマシン/BswM の自動設定。
モジュール初期化および通信制御の自動設定のほか、プロジェクトに関連した BswM の設定([Custom Configuration])の領域も表示
これは静的な設定ではなく、必要なパラメーターはすべて考慮に入れられます。新しい PDU グループが作成されるなどしてパラメーターに変更が
あれば、DaVinci Configurator Pro はこれをただちに把握し、再設定が必要であることをユーザーに通知します。
DaVinci Configurator Pro に組み込まれている支援機能は、規則やアクションリストの作成といった自由な設定作業にも対応します。これらの
機能は、手順に沿った設定の支援や、必須または任意のパラメーターに関するノウハウの提供のほか、ミスの検出と考えられる修正の提案を行い
ます。ただし、ユーザーが意図的にそれとは異なる設定を行うことも可能です。
MICROSAR BSWM は AUTOSAR で規定されているものよりもはるかに多くの機能を備えています。たとえば、実行時に規則の解析のオン/
オフを切り替えることもできます。満了のタイミングを BSWM で解析できるようなタイマーも作成できます。このタイマーはアクションによって開始
/停止できます。接続するソフトウェアコンポーネントの中に、まだ使用できないものがあっても、必要なすべてのモード宣言を BSWM で作成し、
ボトムアップ式で設定を行うことができます。
11.5 ISO 26262 アプリケーションのためのウォッチドッグ
ウォッチドッグモジュールはいずれも、ISO 26262/ASIL D に即した安全関連機能のための SEooC (Safety Element out of Context) とし
ても利用できます。これらは実行時のタスク監視の検証のほか、ソフトウェアコンポーネントのフロー制御にも適しています。詳しくは、
「MICROSAR Safe」の章を参照してください。
11.6 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
MICROSAR
44
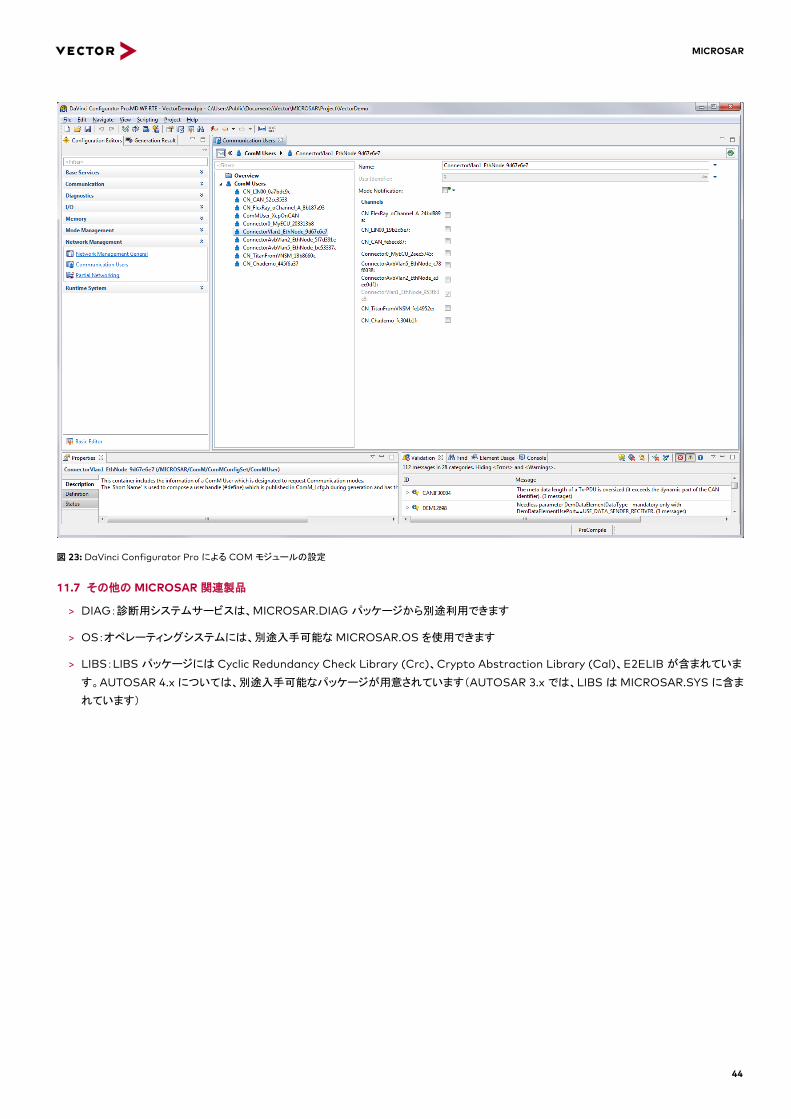
図 23: DaVinci Configurator Pro による COM モジュールの設定
11.7 その他の MICROSAR 関連製品
> DIAG:診断用システムサービスは、MICROSAR.DIAG パッケージから別途利用できます
> OS:オペレーティングシステムには、別途入手可能な MICROSAR.OS を使用できます
> LIBS:LIBS パッケージには Cyclic Redundancy Check Library (Crc)、Crypto Abstraction Library (Cal)、E2ELIB が含まれていま
す。AUTOSAR 4.x については、別途入手可能なパッケージが用意されています(AUTOSAR 3.x では、LIBS は MICROSAR.SYS に含ま
れています)

MICROSAR
45
12 MICROSAR.DIAG – AUTOSAR に対応した診断標準規格、UDS、OBD、J1939 の実装
MICROSAR.DIAG には、AUTOSAR に対応した診断プロトコルである UDS、OBD-II、WWH-OBD、J1939 を実装するためのベーシックソフ
トウェアモジュールが含まれており、自動車プロジェクト用の診断ソフトウェアとして活用できます。MICROSAR.DIAG はさまざまなタスクを扱いま
す。
> フォールトメモリーおよびフォールト管理を自動車メーカー別に実装
> 診断テスターと ECU 間通信用の診断プロトコルを自動車メーカー別に実装
> アクティブなエラーエントリーによって特定の機能を無効化
> マルチコアでのフォールトメモリー管理
> オンボードテスターの基盤として診断メッセージを送受信
診断データの作成に広く用いられている設定ツール CANdelaStudio と組み合わせて使用すれば、1 つの供給元からすべてがそろった診断ソリ
ューションを享受することができます。
図 24: AUTOSAR 4.3 対応の MICROSAR.DIAG モジュール
12.1 機能概要
> 自動車メーカーに依存しない AUTOSAR 4.x と 3.x 対応ソリューション
> さまざまな自動車メーカーに対応できるカスタマイズされたソリューション
> 診断の分野におけるベクターの長年の経験を活用
> OBDII および WWH-OBD (Euro VI) に対応
> AUTOSAR Diagnostic Extract、CANdela および ODX 形式で設定可能
> 診断コンフィギュレーションに関して、バリアントハンドリングはすでに組込済み
> 共通のキャリブレーションツールを使用した、A2L に基づくオフラインキャリブレーション
> アプリケーションコードテンプレートを最適化して生成

MICROSAR
46
12.2 適用分野
各自動車メーカーは、AUTOSAR 仕様の枠を超えた独自の診断要件を定めています。このため、ベクターでは、MICROSAR.DIAG に自動車メ
ーカー固有の拡張機能を付加して提供しています。この方法は量産に適しており、すでに多くの自動車メーカーに対応済みです。特定の診断仕様
がない ECU については、MICROSAR.DIAG の、自動車メーカーに依存しないバンドルをご利用いただけます。
MICORSAR.DIAG は、EURO VI などの現行および将来の法的要件に使用可能です。OBD-II (ISO 15031/SAE J1979) および WWH-OBD (ISO 27145) に対するサポートは、オプションとして提供しています。
ECU の診断コンフィギュレーションにバリアントが必要な場合、MICROSAR.DIAG はこれに対応した高性能ソリューションを提供します。最大 31個の異なるパラメーター化を定義でき、これらをリソース的に最適な方法で ECU に保存します。これによって、同じデータやサービス、DTC への
同一インターフェイスは、生成された診断コード内でまとめられるので、ECU ソフトウェア内での重複を防ぐことができます。
12.3 モジュールおよびアドオン
MICROSAR.DIAG のベーシックソフトウェアモジュールには、AUTOSAR 4.x および 3.x で定義されている 3 つのベーシックソフトウェアモジュ
ール(Dcm、Dem、Fim)の機能が含まれています。
> Dem - Diagnostic Event Manager
Dem モジュールには、それぞれの自動車メーカーの ECU フォールトメモリーに関する要求が実装されています。AUTOSAR 3.x だけでな
く、AUTOSAR 4.x にも対応した自動車メーカーに依存しないバリアントもあります。このバリアントでは、下記の機能を標準機能として提供し
ています。
> UDS 規格に基づく、全 DTC ステータスビットの管理
> 個々のスナップショットおよび拡張データレコードの定義
> あらかじめ定義された拡張レコード(OccurenceCounter など)
> カウンターおよびタイムベースのエラーデバウンスアルゴリズム
> メモリーがフルのとき、優先度の低いエラーを抑制
> エラーの柔軟なアンラーニング(エイジング)
> 診断コンフィギュレーションに関するバリアントハンドリング
> Link Time コンフィギュレーションバリアント
> 設定データを圧縮してコードサイズを最適化
> 複合エラーのサポート
> Dem-サテライトによるマルチコアのサポート
> AUTOSAR3.x と 4.x 仕様の混在した(AUTOSAR 混在型)のプロジェクトに最適
> Post-build loadable および Post-build selectable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
アドオン
> マスター/プライマリーOBD ECU に対応した OBD-II (ISO 15031/SAE J1979)
> WWH-OBD (ISO 27145)
Dem の基本機能は、インターフェイスの定義を除き、AUTOSAR 3.x と 4.x の間でわずかながら異なります。このため、ベクターでは移行用のソ
リューションを提供しています。これにより、AUTOSAR 3.x 対応のソフトウェアコンポーネントを AUTOSAR 4.x のプロジェクトに簡単に移行する
ことができます。
> Dcm - Diagnostic Communication Manager
Dcm モジュールは、UDS および OBD-II のサービスを ECU に実装します。
AUTOSAR Release 4.x と 3.x のどちらの Dcm にも、自動車メーカーに依存しないバリアントがあります。サポートされている全サービス
のリストについては、本章の最後にある MICROSAR.DIAG についてのテーブルをご参照ください。
特定の自動車メーカーの Dcm モジュールには、特定の自動車メーカーの仕様が実装されます。これについては、より詳しい情報をご用意し
ています。
AUTOSAR 標準からの拡張

MICROSAR
47
> 診断コンフィギュレーションに関するバリアントハンドリング
> ベクターのフラッシュブートローダーと容易に統合可能
> ECU ソフトウェア用アプリケーションコードテンプレートの生成(AUTOSAR 3.x)
> J1939Dcm:大型車両専用の Dcm モジュール
アドオン
> OBD-II (ISO 15031-5) のサポート
> WWH-OBD (ISO27145)
> Fim - Function Inhibition Manager
Fim モジュールには、AUTOSAR 3.x および 4.x の機能が標準機能として含まれています。
> J1939Dcm – SAE J1939 Diagnostic Communication Manager
J1939Dcm は大型車両専用のモジュールで、フォールトメモリーの読出しなどに使用される、SAE J1939-73 プロトコルの診断メッセージ
を実装します。
12.3.1 AUTOSAR 標準から拡張したベクターモジュール
> vDrm - Diagnostic Request Manager
MICROSAR vDrm は、同一の ECU や別の ECU に診断要求を送信し、その応答を受信します。これにはアプリケーションが UDS サービ
スを送信/受信するための API が用意されています。vDrm は、車内の他の ECU を識別することによって、並行する接続を管理できるよ
うにするほか、危険な恐れのある診断要求をブロックするファイアウォールの機能も提供します。このモジュールは外部接続されたテスター
のように動作するほか、オンボードテスターを実装するための基盤となります。
> vDes - Vector Diagnostic Event Synchronizer
vDes モジュールで、複数の MCU の診断モニタリングが可能です。vDes にはマルチコントローラーDem の機能が含まれます。診断マスタ
ーは診断スレーブ上の Dem からの通信から要求を満たしたイベントを収集し、イベントメッセージをローカルに受信します。
12.3.2 クロスパッケージのアドオン
アドオンの中には複数のパッケージに影響を与えるものもあります。以下にその詳細を示します。
> MICROSAR.IDM – Identity Manager:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
> MICROSAR.MC – Multi-Core:詳しくは、「MICROSAR Multi-Core」のセクションをご覧ください
> MICROSAR.PBL – Post Build Loadable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
12.4 設定およびパラメーター化
MICROSAR.DIAG に含まれるベーシックソフトウェアモジュールは、DaVinci Configurator Pro を使用して設定することで、お客様のアプリケ
ーションのニーズに簡単に合わせることができます。これは CANdela、AUTOSAR Diagnostic Extract、ODX ファイルまたは「ECU Configuration Description」のいずれかを使用して実施できます。
AUTOSAR 3.x の場合、Dcm の診断固有のパラメーター化は、CANdela ファイルでのみ実行します。「診断オーサリングツール」として定評ある
CANdelaStudio を使えば、パラメーターをすばやく簡単に作成したり、一般によく使用されている ODX ダイアレクトからインポートすることもでき
ます。

MICROSAR
48
図 25: MICROSAR.DIAG モジュールのパラメーター化は CandelaStudio で実行
図 26: MICROSAR.DIAG のパラメーター化は、CANdelaStudio と DaVinci Configurator Pro で実行
12.5 製品に含まれるもの
標準コンポーネントに加え、CANdela diagnostic descriptions 用コンバーターも提供されます。
12.6 診断アプリケーションに関するサービス
> お客様固有の MICROSAR.DIAG 拡張機能
> お客様固有の診断アプリケーションの作成
> お客様の ECU ソフトウェアに診断機能を統合
12.7 その他の関連するベクター製品
特定の ISO 規格を満たすため、MICROSAR.DIAG を下記の MICROSAR 製品と組み合わせて使用することができます。
> MICROSAR.CAN(ISO 15765-3 または ISO/DIS 14229-3)
> MICROSAR.FR (ISO/DIS 14229-4)
> MICROSAR.ETH (ISO/DIS 14229-5)

MICROSAR
49
CANdelaStudio を使用すると、CANdela または ODX ファイルをパラメーター化して MICROSAR.DIAG を設定することができます。詳しくは、
ベクターまでお問い合わせください。
大型車両の診断には、MICROSAR.CAN の J1939 固有のモジュールが必要になります。
12.8 サポートしている診断サービス
MICROSAR.DIAG の Dcm モジュールは、下記の UDS 診断サービスをデフォルトでサポートしています。
診断サービス名(ISO 14229-1) サービス ID (hex)
AUTOSAR 4.x: SWC に求められる対処
AUTOSAR 3.x: SWC に求められる対処
診断および通信管理機能ユニット
DiagnosticSessionControl 10 -(DCM で内部的に処理) …サービス実行を許可
ECUReset 11 -(DCM/BSWM で処理) -(DCM/BSWM で処理)
SecurityAccess 27 … セキュリティーレベルごとに Seed&Key を 計算
… セキュリティーレベルごとに Seed&Key を計算
CommunicationControl 28 -(DCM/BSWM で処理) -(DCM/BSWM で処理)
TesterPresent 3E - -
ControlDTCSetting 85 -(DEM モジュールで処理) -(DEM モジュールで処理)
データ転送機能ユニット
ReadDataByIdentifier 22 …各 DataElement のデータ取得処理 …各 DataId のデータ取得処理
ReadMemoryByAddress 23 コールアウトを使用 コールアウトを使用
ReadDataByPeriodic Identifier 2A - -
DynamicallyDefineData Identifier 2C - -
WriteDataByIdentifier 2E …各 DataElement のデータアクセス処理 …各 DataId のデータアクセス処理
WriteMemoryByAddress 3D コールアウトを使用 コールアウトを使用
格納データ転送機能ユニット
ReadDTCInformation 19 -(DEM モジュールで処理) -(DEM モジュールで処理)
ClearDiagnosticInformation 14 -(DEM モジュールで処理) -(DEM モジュールで処理)
入出力制御機能ユニット
InputOutputControlByIdentifier 2F …各 DataElement の I/O 制御 …各 DataId の I/O 制御
ルーチン遠隔起動機能ユニット
RoutineControl 31 ...各 RoutineId の開始(停止/結果要求) ...各 RoutineId の開始(停止/結果要求)
図 27: Dcm モジュールの UDS 診断サービス
MICROSAR.DIAG の Dcm モジュールは、下記の OBD II 診断サービスをオプションでサポートします。
診断サービス名(ISO 15031-5) サービス
ID (hex)
SWC に求められる対処
CAN の診断サービス定義
Request Current Powertrain Diagnostic Data 01 …「サポートされている ID」と DEM の ID 以外の各 PID のデータ取得処理
Request Powertrain Freeze Frame Data 02 -(DEM モジュールで処理)
Request Emission-Related Diagnostic Trouble Codes 03 -(DEM モジュールで処理)
Clear/Reset Emission-Related Diagnostic Information 04 -(DEM モジュールで処理)

MICROSAR
50
診断サービス名(ISO 15031-5) サービス
ID (hex)
SWC に求められる対処
Request On-Board Monitoring Test Results for Specific Monitored Systems
06 …MonitorId の各 TestId のデータ取得処理
Request Emission-Related Diagnostic Trouble Codes Detected During Current or Last Completed Driving Cycle
07 -(DEM モジュールで処理)
Request Control of On-Board System, Test or Component 08 …各 TestId を処理
Request Vehicle Information 09 …「サポートされている ID」と DEM の ID 以外の各 InfoType ID のデータ取得
処理
Request Emission-Related Diagnostic Trouble Codes with Permanent Status
0A -(DEM モジュールで処理)
図 28: Dcm モジュールの OBD2 UDS 診断サービス

MICROSAR
51
13 MICROSAR.MCAL –マイクロコントローラー周辺機能制御用 AUTOSAR ドライバー
MICROSAR.MCAL パッケージには、マイクロコントローラーの周辺機能を制御するドライバーが含まれています。このパッケージは、AUTOSAR仕様のマイクロコントローラー抽象レイヤー(MCAL)に完全に対応しています。各 MICROSAR.MCAL ドライバーは、コントローラー固有のドライ
バーとして最適化されています。
図 29: AUTOSAR 4.3 対応の MICROSAR.MCAL モジュール
13.1 機能概要
> AUTOSAR 4.x および 3.x に対応
> マイクロコントローラー周辺機能を完全にサポート
> パラメーターの依存関係は設定ツールが考慮するため設定が簡単
> 設定ツールによる妥当性テストおよび完全性テストにより、開発がスピードアップ
> 機能を無効にすることができるため、リソースを節約
> ハードウェアバッファー利用の最適化で、ハードウェア要件が緩和
> 効率的な補助機能がゲートウェイ開発をサポート
13.2 適用分野
MICROSAR.MCAL はマイクロコントローラー周辺機能用のターンキーソリューションです。別のハードウェアに切り替える際は、機能ソフトウェア
に変更を加える必要はなく、MICROSAR.MCAL を入れ替えて新しいドライバーを取り込むだけで完了です。
MICROSAR.MCAL ドライバーは、MICROSAR パッケージ全体に完全に適合します。あとはお客様のアプリケーションに必要な他のパッケージ
(MICROSAR.CAN、MICROSAR.MEM など)をただ追加するだけでよく、こうすることで AUTOSAR 仕様に対応した完全な通信スタックやメモ
リー管理などを用意できます。
MICROSAR
52
13.3 モジュールおよびアドオン
MICROSAR.MCAL パッケージに含まれているドライバーモジュールは、Can、Eth、Fr、Lin、I2C と、AUTOSAR 4.x 対応バージョンでは
PamTst テストモジュールです。これらのモジュールは AUTOSAR 4.x に対応しており、入手可能な各種マイクロコントローラーで使用できます。
> Can – CAN Driver
Can ドライバーは、メッセージの送受信やコントローラーの状態の切替え(スリープ、停止など)を目的とした CAN ハードウェアへのアクセス
を抽象化します。
AUTOSAR 標準からの拡張
> メッセージの受信時およびメッセージ送信成功後に通知(コールバック)。これによってアプリケーション固有コードを自動実行することが可能
アドオン
> 「HighEnd」オプションにより、複数のベーシック CAN オブジェクトに対するフィルターオプションの拡張、受信時の割込時間を短縮するた
めの受信キュー、データの整合性確保と割込みによる負荷の軽減を目的としたメールボックスの個別ポーリング機能が提供されます
> 複数の CAN コントローラーを 1 つの物理 CAN バス(共通 CAN)上にまとめることによる Full-CAN オブジェクト数の拡大
> Can (SocketCAN)
SocketCan API は、Linux 環境下で CAN 通信するための、ハードウェアに依存しない API です。このモジュールは既存の SocketCAN API を使用して CAN 通信を実現し、Linux での MICROSAR スタックの実行を可能にします。
> Eth – Ethernet Driver
Eth ドライバーは、メッセージの送受信やコントローラーの状態の切替えを目的とした Ethernet ハードウェアへのアクセスを抽象化します。
> EthSwt – Ethernet Switch Driver
EthSwt モジュールは、Ethernet スイッチを制御および設定するための、統一された、ハードウェアに依存しないインターフェイスを提供し
ます。これは、サラウンドビュー用カメラのように、同じ ECU を複数使用する場合の MAC の学習も実施します。
> Fr – FlexRay Driver
Fr ドライバーは、メッセージの送受信やコントローラーの状態の切替えを目的とした FlexRay ハードウェアへのアクセスを抽象化します。
AUTOSAR 標準からの拡張
> バスの自己診断。FlexRay コントローラーは、アプリケーションでエラーステータスを呼び出すために、エラーを検出するとアプリケーション
にエラーを通知
> 最適化された Wakeup During Operation (WUDOP)
> CancelTransmit および L-PdU 再設定 API のサポート
> プリコンパイルによる最適化(シングルチャンネルシステムの場合など)
> Lin – LIN Driver
Lin ドライバーはフレーム送信(ヘッダー、応答、スリープモード、ウェイクアップ)の開始と、応答の受信、現在の状態のチェック、ウェイクアッ
プイベントの検証を目的としたサービスを提供します。
> RamTst – Ram Test
RamTst モジュールは、マイクロコントローラー内部の RAM セルをテストします。ECU の起動およびシャットダウン時には、診断コマンドよ
って完全なテストが実施されます。通常の動作時には、周期的なテスト(ブロック単位またはセル単位)が実行されます。
> Crypto(HW) – Crypto Driver
これはサードパーティーが提供するハードウェア暗号化ドライバーである Crypto を抽象化します。
13.3.1 AUTOSAR 標準から拡張したベクターモジュール
> vI2c – Vector I2C Driver
vIICDRV ドライバーは外部の I2C チップとの通信を目的としたサービスを提供します。
AUTOSAR 標準からの拡張
MICROSAR
53
> vI2c には、Inter-Integrated Circuit Bus (I2C) を介して外部周辺機能チップに接続するためのインターフェイス用ドライバーが含まれ
ています(AUTOSAR の拡張)
13.3.2 クロスパッケージのアドオン
アドオンの中には複数のパッケージに影響を与えるものもあります。以下にその詳細を示します。
> MICROSAR.IDM – Identity Manager:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
> MICROSAR.PBL – Post Build Loadable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
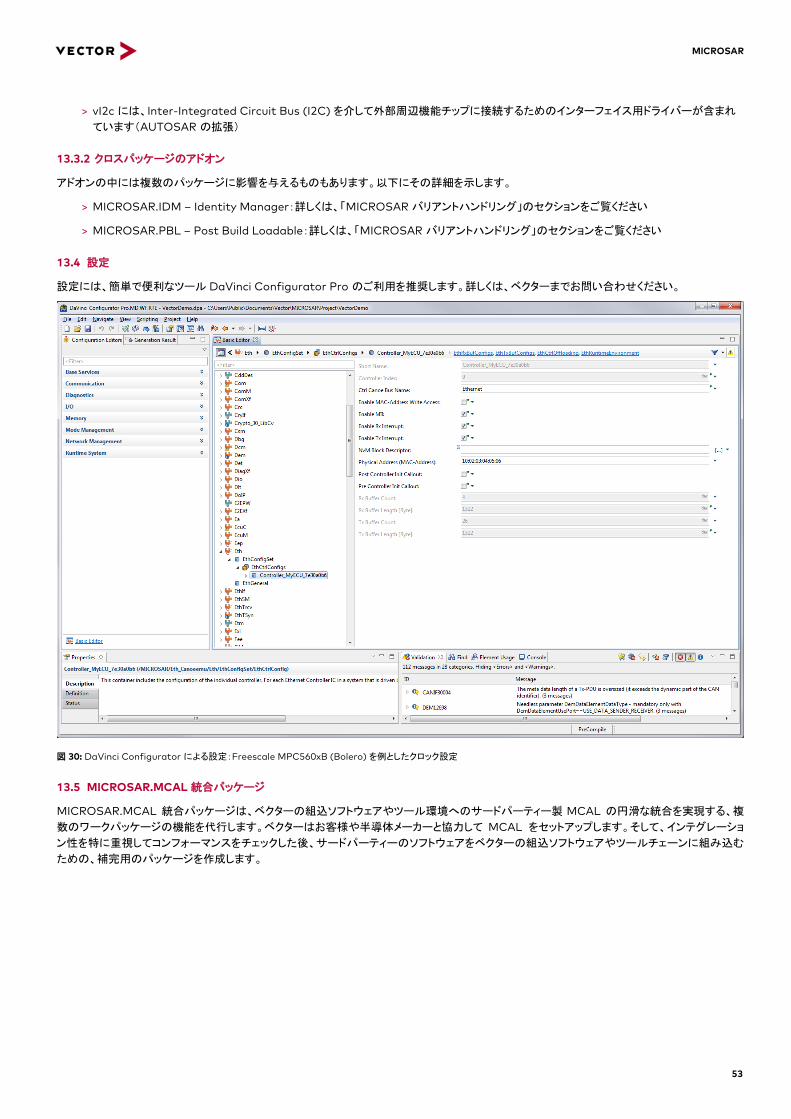
13.4 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
図 30: DaVinci Configurator による設定:Freescale MPC560xB (Bolero) を例としたクロック設定
13.5 MICROSAR.MCAL 統合パッケージ
MICROSAR.MCAL 統合パッケージは、ベクターの組込ソフトウェアやツール環境へのサードパーティー製 MCAL の円滑な統合を実現する、複
数のワークパッケージの機能を代行します。ベクターはお客様や半導体メーカーと協力して MCAL をセットアップします。そして、インテグレーショ
ン性を特に重視してコンフォーマンスをチェックした後、サードパーティーのソフトウェアをベクターの組込ソフトウェアやツールチェーンに組み込む
ための、補完用のパッケージを作成します。
MICROSAR
54
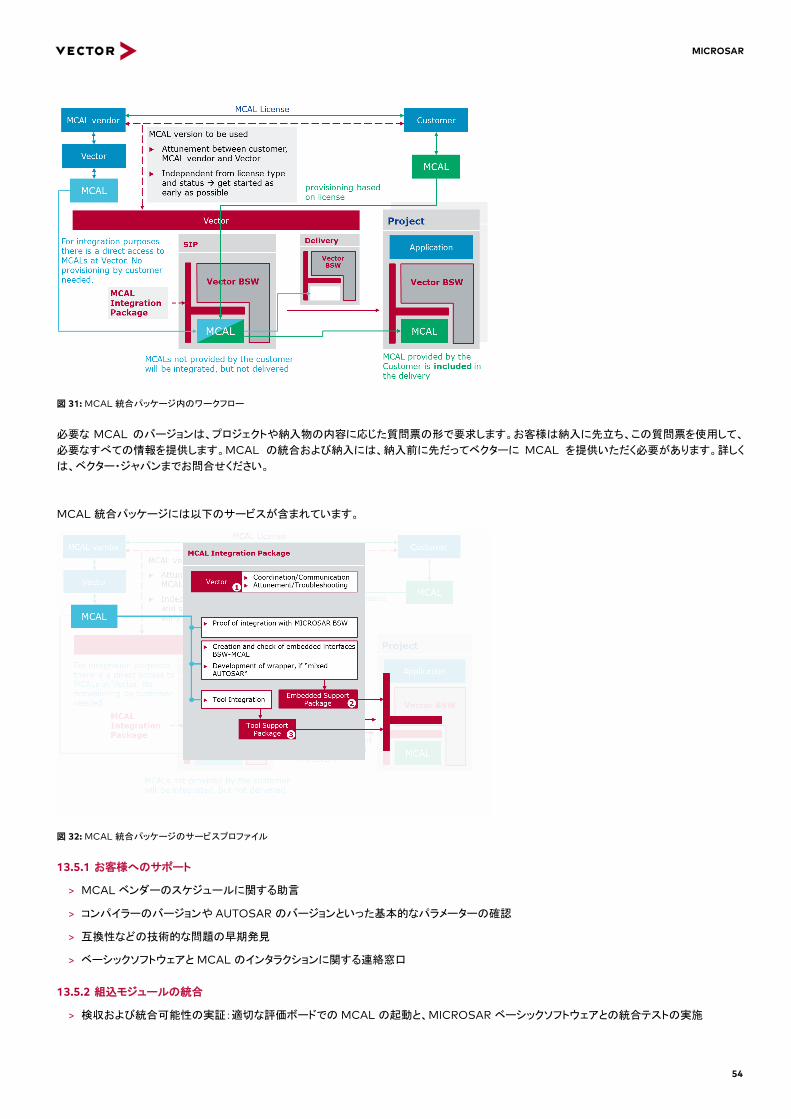
図 31: MCAL 統合パッケージ内のワークフロー
必要な MCAL のバージョンは、プロジェクトや納入物の内容に応じた質問票の形で要求します。お客様は納入に先立ち、この質問票を使用して、
必要なすべての情報を提供します。MCAL の統合および納入には、納入前に先だってベクターに MCAL を提供いただく必要があります。詳しく
は、ベクター・ジャパンまでお問合せください。
MCAL 統合パッケージには以下のサービスが含まれています。
図 32: MCAL 統合パッケージのサービスプロファイル
13.5.1 お客様へのサポート
> MCAL ベンダーのスケジュールに関する助言
> コンパイラーのバージョンや AUTOSAR のバージョンといった基本的なパラメーターの確認
> 互換性などの技術的な問題の早期発見
> ベーシックソフトウェアと MCAL のインタラクションに関する連絡窓口
13.5.2 組込モジュールの統合
> 検収および統合可能性の実証:適切な評価ボードでの MCAL の起動と、MICROSAR ベーシックソフトウェアとの統合テストの実施

MICROSAR
55
> 上位ソフトウェアレイヤーに対するコンパイル/リンクテスト
> ベーシックソフトウェアに関連する MCAL 基本機能のテスト(CAN 通信、NV データストレージなど)
> ベーシックソフトウェアと MCAL の間の組込インターフェイス(MemMap、Compiler Config)の作成/サービス
> 「AUTOSAR 混在型」プロジェクト向けのラッパーの開発(このサービスは AR 3.x に準拠したベーシックソフトウェアと AR 4.0.3 以降の
MCAL でご利用いただけます)
13.5.3 ツールの統合
選択した MCAL をベクターのツールチェーンに統合する場合は、その特性に応じて複数の方法が考えられます。ベクターが特に重視するのは、
お客様にとって最適で、最も使いやすいソリューションの実現です。したがって、MCAL コンポーネントを BSW コンフィギュレーションに組み込む
ための基本的な条件としては以下が挙げられます。
> AUTOSAR に準拠した記述ファイルがある
> MCAL の妥当性検査/設定の担当者が AUTOSAR に準拠したコンフィギュレーションファイルを操作できる
これらの事前条件が満たされれば、設定ツールの DaVinci Configurator Pro に MCAL を統合し、モジュールを生成できます。
独自開発のフォーマットが使用されている場合や、設定の作成と検証を簡単に行うために、MCAL 設定ツールで複雑な抽象化を扱う必要がある
場合、ベクターは多様なコンフィギュレーションファイルやツールをスムーズに併用できるよう、適切な手段を提供します。

MICROSAR
56
14 MICROSAR.EXT – 外付デバイス制御用の AUTOSAR ドライバー
MICROSAR.EXT には、CAN 用(CanTrcv)、FlexRay 用(FrTrcv)、LIN 用(LinTrcv)、Ethernet 用(EthTrcv)それぞれの、通信関連の
AUTOSAR に準拠したトランシーバードライバーが含まれています。さらにそれ以外にも、EEPROM、フラッシュメモリー、watchdog (Ext) など
の外付デバイス用ドライバーも含まれています。ドライバーに搭載されている機能は、AUTOSAR の「ECU Abstraction Layer」に規定されてい
る機能で、AUTOSAR 4.x に対応しています。それぞれの機能は該当デバイスに合わせて最適化されており、一般に普及している各種デバイス
で使用可能です。
図 33: AUTOSAR 4.3 対応の MICROSAR.EXT モジュール
14.1 機能概要
> 外付のトランシーバーデバイスおよびメモリーデバイスの制御に最適
> AUTOSAR 4.x および 3.x に対応
> パーシャルネットワーキングに対するトランシーバーのサポート
> LIN および Ethernet トランシーバーに対する追加のサポート
> 他のモジュールとのパラメーター依存関係が考慮されており、設定が簡単
> 設定ツールによる妥当性および完全性チェックにより、開発がスピードアップ
14.2 適用分野
MICROSAR.EXT は、外付周辺機能のデバイス用のすぐに利用可能なソリューションです。したがって、外付ハードウェアを切り替えるときにアプ
リケーションソフトウェアに変更を加える必要はなく、MICROSAR.EXT の該当ドライバーを切り離せばよいだけです。
あとはお客様のアプリケーションに必要な他のパッケージ(MICROSAR.CAN、MICROSAR.MEM など)をただ追加するだけでよく、こうすること
で AUTOSAR 仕様に対応した通信スタックやメモリー管理を用意できます。
CAN ネットワークのパーシャルネットワーキングには専用のトランシーバーが必要です。MICROSAR.EXT には、これらのトランシーバーの多く
に適したドライバー(CanTrcv)がすでに用意されています。

MICROSAR
57
14.3 モジュールおよびアドオン
> CanTrcv – CAN Transceiver Driver
このドライバーは外付 CAN トランシーバーの動作状態の制御を担当します。これにはウェイクアップおよびスリープ機能の制御が含まれて
います。
> EthTrcv – Ethernet Transceiver Driver
EthTrcv は、同じ種類の複数のトランシーバーを操作するための、統一された、ハードウェアに依存しないインターフェイスを提供します。
EthTrcv の設定はトランシーバー固有であり、使用される物理ネットワークの特長が考慮されます。
AUTOSAR 標準からの拡張
> Ethernet トランシーバードライバー、電力線通信(PLC)および無線 LAN (WLAN) にも対応(AUTOSAR 4.x および 3.x)
> FrTrcv – FlexRay Tranceiver Driver
外付 FlexRay トランシーバー用の FrTrcv ドライバーは、トランシーバーのオン/オフの切替えを担当します。
> LinTrcv – LIN Transceiver Driver
外付 LIN トランシーバー用の LinTrcv モジュールは、ウェイクアップおよびスリープ機能のモニターと操作を担当します。
AUTOSAR 標準からの拡張
> LIN トランシーバードライバー(AUTOSAR 3.x にも対応)
> Ext – External Drivers
ベクターはご要望に応じて、外部接続デバイス用のドライバーの実装を提供します。
> Adc (EXT)
> Eep (EXT)
> Fls (EXT)
> EthSwt (EXT)
> Eth (EXT)
> Wdg (EXT)
14.3.1 AUTOSAR 標準から拡張したベクターモジュール
> vSbc – Vector System Basis Chip
vSBC は外部接続された System Basis Chip (SBC) 用の抽象レイヤーを提供します。この実装により、上位レイヤーが SBC ハードウェ
アを制御するために使用できる、ハードウェアに依存しないインターフェイスが与えられます。vSBC には、SBC 周辺機能に応じて
AUTOSAR に準拠した上位レイヤーモジュール(CanTrcv、LinTrcv、Wdg など)が含まれており、BSW スタックはそれを通じて関連する
SBC 機能にアクセスすることができます。その他の SBC 機能にも、vSBC の実装によって提供される RAW-API を使用した IO ハードウェ
アモジュールや、コンプレックスドライバーによってアクセスできます。RAW-API では、SBC レジスターへの基本的なアクセス(読込み/書
込み)が可能です。vSBC には、SBC との接続を確立するための適切な MCAL ドライバー(Spi など)が必要になります。
図 34: System Basis Chip はシリアルインターフェイス(SPI、I²C など)を介してマイクロコントローラーと接続されます

MICROSAR
58
14.4 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
図 35: DaVinci Configurator Pro による MICROSAR.EXT の設定
14.5 その他の MICROSAR 関連製品
外付デバイスは、SPI、DIO、ポートのいずれかで物理的に駆動されます。したがって、それに対応するドライバー(Spi、Dio、Port)が必要で、こ
れらは MICROSAR.CAL に含まれています。
14.6 その他のサービス
ベクターでは、お客様独自のドライバーやサードパーティー製(半導体メーカーなど)のドライバーを DaVinci Configurator Pro に統合するサー
ビスを提供しています。これにより、1 つのツールでシームレスかつ迅速に ECU ソフトウェアのすべてを設定できます。

MICROSAR
59
15 MICROSAR.IO – AUTOSAR I/O ハードウェアの抽象化
IO クラスターはアプリケーション(ソフトウェアコンポーネントなど)と MCAL モジュールの間の接続を確立します。これによってアプリケーションや
ソフトウェアコンポーネントに I/O ポートへのアクセスが与えられ、センサーデータの読出しやアクターの操作などが可能になります。
IO クラスターには、これを行うための専用のベーシックソフトウェアモジュールが含まれています。さらに、DaVinci Developer を使用することに
より、ECU に完全に適合した IOHWAB を確立することも可能です。
図 36: MICROSAR.IO クラスター
15.1 機能概要
> センサーおよびアクターのシグナルの取得や供給を行うユーザー固有コードをすばやく実装
> コード例の生成:ユーザーはデジタルシグナルの読出し/書込み用テンプレートと拡張可能な C コードを選択可能
> 必要なインターフェイスがすべて定義されたソフトウェアコンポーネント記述(ファイル)を提供
15.2 AUTOSAR 標準から拡張したベクターモジュール
> vDioHwAb – Vector Digital Input Output Hardware Abstraction
Digital Input Output Hardware Abstraction(vDioHwAb:デジタル I/O ハードウェア抽象化)は、アプリケーションと MCAL の DIOシグナルとの間の接続を確立します。したがって MICROSAR vDioHwAb モジュールでは、DIO 固有のコードテンプレートに加えてソフト
ウェアコンポーネントのインターフェイスも作成され、それによって DIO モジュールへのすばやく簡単なアクセスが実現されます。ここに示す
ように、vDioHwAb モジュールがカバーするのは IoHwAb の一部ですが、ADC や ICU チャンネルへのアクセスを可能にする IoHwAbモジュールなどを用いることで、これをさらに拡張できます。
15.3 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
15.3.1 vDioHwAb
設定/生成ツール「DaVinci Configurator Pro」では、MICROSAR.MCAL や MICROSAR.IO の設定パラメーターの妥当性チェックを行うこ
とができます。次のような「ボトムアップ」方式を推奨します。

MICROSAR
60
> MCAL ドライバーを設定
> MICROSAR.IO を設定
> MICROSAR.IO モデリング用のソフトウェアコンポーネントディスクリプションを生成
MICROSAR.IO の設定では、個々のシグナルを定義します。その際、任意の数のポートプロトタイプを、1 つのポートインターフェイスから導出で
きます。送信者/受信者インターフェイスでは、ポートプロトタイプ対ランナブルエンティティーが 1:n になるような分配が可能です。RTE のランナ
ブルエンティティーと、SchM のスケジューラブルエンティティーは、ユーザー設定可能です。MICROSAR.IO には、機能ソフトウェアが RTE 経由
で I/O シグナルにアクセスするのに必要な、クライアント/サーバーインターフェイスやコードテンプレートがすべて備わっています。これらを使い、
シグナルの条件設定やフィルタリングを行うことができます。
15.3.2 IoHwAb
DaVinci Developer を使用すれば、手軽に IoHwAb ソフトウェアコンポーネント記述(ファイル)を作成し、後からソフトウェアコンポーネントの設
計に実装できます。さらに、DaVinci Developer のオプションである.CPG と MICROSAR.RTE のいずれかを使用して、個々の IoHwAb を実装
するためのコードテンプレートをこのディスクリプションから直接作成できます。開発技術者はこのコードテンプレートをデバウンス処理やシグナル
フィルターといった ECU 固有のアルゴリズムを利用して拡張し、MCAL API に接続します。
15.4 その他の MICROSAR 関連製品
外付デバイスで I/O シグナルにアクセスする場合、I/O スタックには MICROSAR.EXT のドライバーも必要になります。
15.5 その他のサービス
ベクターでは、プロジェクトワークの一環として、お客様固有の ECU に合わせた、完全な IoHwAb レイヤーの開発をサポートいたします。ベクタ
ーが持つ AUTOSAR の仕様や手法に関する詳しい知識や、ECU ソフトウェアの統合における豊富な経験を是非ご活用ください。

MICROSAR
61
16 MICROSAR.RTE - AUTOSAR 仕様に対応したソフトウェアコンポーネント用の最適なランタイム環境
ベクターの MICROSAR.RTE(ランタイム環境)は、スケーラブルで高度に最適化された AUTOSAR ランタイム環境です。Rte は AUTOSAR に
よって導入されたモジュールの 1 つで、ソフトウェアコンポーネント間の通信を管理します。情報フロー全体の整合性を確認し、アプリケーションソ
フトウェアおよびベーシックソフトウェア、複合デバイスドライバー(Cdd)の間のインターフェイスを提供します。
図 37: AUTOSAR 4.3 対応の MICROSAR.RTE モジュール
16.1 機能概要
> 設定が容易でスケーラブル
> AUTOSAR 4.x および 3.x に対応
> 設定の整合性を徹底的にチェック
> インテリジェントな同期メカニズムでコードを最適化
> ソフトウェアコンポーネント用に生成されたコードテンプレートなどが用意されているので、AUTOSAR 対応作業がすぐに開始可能
> 移行プロジェクトに最適
> S/R ポート、InterRunnable(ランナブル間で共通に使用できる)変数、PerInstance(インスタンスごとの)メモリーに XCP でアクセスできる
ため、アプリケーションのテストが簡素化
16.2 適用分野
ある ECU の機能ソフトウェアを AUTOSAR 対応ソフトウェアコンポーネントで実装するときには、ランタイム環境として Rte が必要です。ECU ソ
フトウェアはモジュール構成になっているため、高い柔軟性があります。つまり、人手を使って開発したソフトウェアコンポーネントや、モデルベース
開発ツールを使って設計したソフトウェアコンポーネントを、複数の ECU プロジェクトで使い回すことができます。Rte は、その特定の ECU に合
わせて(場合によってはベーシックソフトウェアモジュールにも合わせて)再設定、再生成すればよいだけです。また、ソフトウェアコンポーネントに
ついても、1 つの ECU 上で複数のインスタンスに使用することが可能です。
MICROSAR.RTE を生成する際、ユーザーは 2 つのモードのどちらかを選ぶことができます。

MICROSAR
62
> 初期段階の個々のソフトウェアコンポーネント開発に適した、コントラクトフェーズ生成。この場合、ジェネレーターからは、Rte 全体ではなく、
個々のソフトウェアコンポーネント用のヘッダーファイルだけが生成されます。ソフトウェアコンポーネントは個別にコンパイルして、たとえば、
オブジェクトコードとして開発パートナーに転送するなどできます
> ECU ソフトウェア全体用の Rte 生成。このモードで生成されたコードは、非常に効率がよく、必要とするメモリースペースもわずかです。ECU全体の設定に適しており、また、実行時間が短く、割込み禁止時間も最小限なのでシステムリソースもほとんど必要としません。この特性は、
使用するハードウェアのプロパティーに合ったインテリジェントな同期メカニズムなどによるものです
16.3 モジュールおよびアドオン
> Rte – Runtime Environment
MICROSAR.RTE には、AUTOSAR 4.x と 3.x に対応した、下記の機能が含まれています。
> 送信者/受信者間通信、クライアント/サーバー間通信
> モード管理
> ランナブル間で共通に使用される変数と排他エリア
> 送信者/受信者ポートを介した不揮発メモリーブロックソフトウェアコンポーネントへのアクセス
> ランナブルのトリガー
> ソフトウェアコンポーネントのオンライン/オフラインのキャリブレーションだけでなく、XCP プロトコルを使用した、S/R ポート、
InterRunnable 変数、Per-Instance メモリーの測定もサポートされています
> ソフトウェアコンポーネントの複数インスタンス化、Per-Instance(インスタンスごとの)メモリーのサポート
> Schedule Manager/BSW Scheduler (SchM):AUTOSAR 4.0 以来、SchM モジュールの機能は Rte が提供しています。以前、これ
は MICROSAR.SYS に含まれていました。SchM モジュールについて詳しくは、「MICROSAR.SYS」の章を参照してください
> COMXF、SOMEIPXF、E2EXF に対するトランスフォーマーインターフェイスのサポート。詳しくは、「MICROSAR.COM」の章を参照して
ください
> オプションの SOMEIPXF を通じた外部クライアント/サーバー通信(ECU 間)
AUTOSAR 標準からの拡張
このほか、MICROSAR.RTE は AUTOSAR 3.x 対応の下記機能も備えています。
> 「SWC Description」に基づいた、ソフトウェアコンポーネント用コードテンプレートの生成。このテンプレートには Rte の API がすべて含
まれています
> AUTOSAR オペレーティングシステムに定められた、メモリー保護メカニズムの使用。この機能は、ベクターが提供する AUTOSAR オペ
レーティングシステムの MICROSAR.OS を使用している場合に特に適しています
> AUTOSAR のコンセプトである「モード依存ランナブル」のための初期化ランナブルの設定
> Rte のプロパティーを表示する HTML レポートの生成。レポートには、計算された Rte リソース負荷(RAM+コンスタント)などの情報が含
まれています
> 既存のキャリブレーションおよび診断基準へ簡単にリンクできる、A2L ファイルの生成
アドオン
> メモリー保護のための MPU のサポート
> マルチコアのサポート
> Post-build selectable:この機能は MICROSAR 製品ファミリー内の「Identity Manager」で利用できます。詳しくは、「MICROSAR バ
リアントハンドリング」のセクションをご覧ください
> BRE - Basic Runtime Environment
Basic Runtime Environment (BRE) を使用することにより、AUTOSAR に対応していないアプリケーションと、実績ある MICROSAR ベ
ーシックソフトウェアとの統合が可能になります。BRE を使用すれば、AUTOSAR で定義されている正式なソフトウェアコンポーネントの設計
は要求されません。既存のアプリケーションアーキテクチャーの使用を可能にするという点で、BRE の使用は ECU プロジェクトを
AUTOSAR アーキテクチャーに移行する最初の一歩となります。

MICROSAR
63
アプリケーションは AUTOSAR のソフトウェアコンポーネントを定義しなくても、BRE を使用してベーシックソフトウェアの機能に直接アクセス
できます。ソフトウェアコンポーネントとベーシックソフトウェアを仲介するミドルウェアの Rte の代わりに、アプリケーションコードが使用されま
す。
アプリケーションと MICROSAR ベーシックソフトウェアとの統合を手軽に行えるよう、BRE は、通常は Rte が実装する以下のような基本機
能を備えています。
> サービスレイヤーのベーシックソフトウェアモジュールのための型定義の生成
> 設定可能なタスクマッピングに基づく、ベーシックソフトウェアの main 関数の呼出し
> ベーシックソフトウェアモジュールの排他エリアの管理
ベーシックソフトウェアは AUTOSAR に準拠したインターフェイスを使用します。そのため BRE を使用する場合は、通常は Rte がベーシッ
クソフトウェアに提供するインターフェイス機能を、アプリケーションが代わって提供する必要があります。
BRE では機能が足りないという場合は、MICROSAR.RTE を使用するのが適切です。熟練した MICROSAR の指導者が、AUTOSAR 互
換アプリケーションとベーシックソフトウェアアーキテクチャーに移行するお客様の作業を支援します。
> SchM – BSW Scheduler
Schedule Manager(スケジュールマネージャー)/BSW Scheduler(ベーシックソフトウェアスケジューラー)は、ベーシックソフトウェアモ
ジュールの実行を制御します。ユーザーの設定では、ベーシックソフトウェアモジュールのタスクと周期時間のみならず、各モジュール間の排
他エリアを一元的に定義できます。AUTOSAR 3.x では、SchM は MICROSAR.SYS の一部です。AUTOSAR 4.x では、
MICROSAR.RTE が SchM の機能を提供しています。
16.4 設定
RTE は、DaVinci Configurator Pro オプション Rte、もしくは DaVinci Developer で設定することができます。詳しくは、ベクターまでお問い合
わせください。
16.5 製品に含まれるもの
標準の製品コンポーネントに加えて、サンプルプログラムと make ファイルも同梱されています。
16.6 その他の MICROSAR 関連製品
Rte には、MICROSAR.OS や osCAN などのオペレーティングシステムが必要です。

MICROSAR
64
17 MICROSAR AMD – AUTOSAR のモニターおよびデバッグ
MICROSAR AMD には、ECU の開発とテストを大幅に簡素化する便利な機能が多数含まれています。AMD はコア機能として、アプリケーショ
ンや MICROSAR ベーシックソフトウェアのエラーとイベントをレポートする機能のほか、特定時点での CPU 負荷やソフトウェア実行時間の情報
を提供する機能を備えています。
図 38: AUTOSAR 4.3 対応の MICROSAR AMD モジュール
17.1 機能概要
> ECU 内部データを取得することにより、ECU のテストを簡素化(AUTOSAR 3 用に実装済み)
> 起動および go-to-sleep 動作の測定が容易
> アプリケーションおよびベーシックソフトウェアの CPU 負荷と実行時間を測定
> 必要な A2L ファイルの自動生成
> ベーシックソフトウェアのエラー状態とプログラムフローのトレースメッセージをレポート
> ASAM によって規格化された、広く普及している XCP プロトコルを使用
17.2 適用分野
MICROSAR AMD パッケージは AUTOSAR ECU ソフトウェアの効率的なテストを支援します。MICROSAR AMD のベーシックソフトウェアモ
ジュールは、MICROSAR ベーシックソフトウェアの重要な内部変数、状態、エラーメッセージのすべてにアクセスできます。
XCP プロトコル(Universal Calibration Protocol)は測定やキャリブレーションの分野でよく使われていますが、これは ECU 内部のパラメータ
ーを転送するのに非常に適しています。ベクターはそれを踏まえ、XCP に基づいて MICROSAR AMD を開発しました。
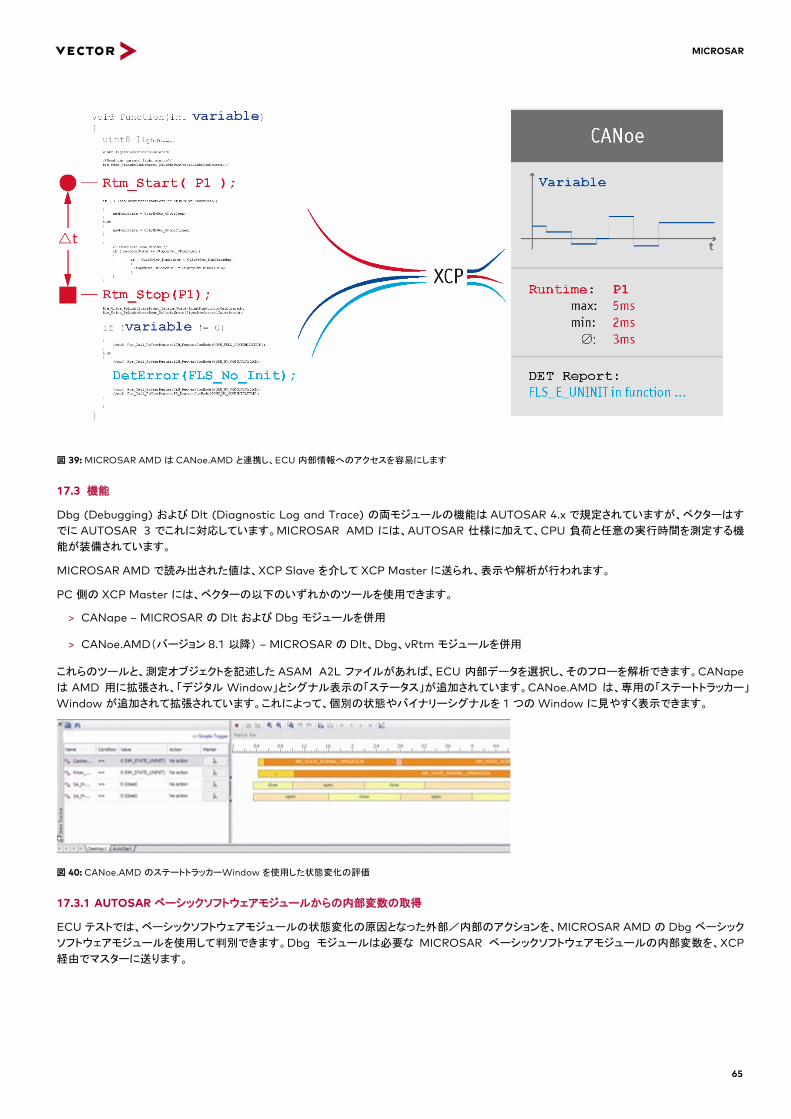
MICROSAR
65
図 39: MICROSAR AMD は CANoe.AMD と連携し、ECU 内部情報へのアクセスを容易にします
17.3 機能
Dbg (Debugging) および Dlt (Diagnostic Log and Trace) の両モジュールの機能は AUTOSAR 4.x で規定されていますが、ベクターはす
でに AUTOSAR 3 でこれに対応しています。MICROSAR AMD には、AUTOSAR 仕様に加えて、CPU 負荷と任意の実行時間を測定する機
能が装備されています。
MICROSAR AMD で読み出された値は、XCP Slave を介して XCP Master に送られ、表示や解析が行われます。
PC 側の XCP Master には、ベクターの以下のいずれかのツールを使用できます。
> CANape – MICROSAR の Dlt および Dbg モジュールを併用
> CANoe.AMD(バージョン 8.1 以降) – MICROSAR の Dlt、Dbg、vRtm モジュールを併用
これらのツールと、測定オブジェクトを記述した ASAM A2L ファイルがあれば、ECU 内部データを選択し、そのフローを解析できます。CANapeは AMD 用に拡張され、「デジタル Window」とシグナル表示の「ステータス」が追加されています。CANoe.AMD は、専用の「ステートトラッカー」
Window が追加されて拡張されています。これによって、個別の状態やバイナリーシグナルを 1 つの Window に見やすく表示できます。
図 40: CANoe.AMD のステートトラッカーWindow を使用した状態変化の評価
17.3.1 AUTOSAR ベーシックソフトウェアモジュールからの内部変数の取得
ECU テストでは、ベーシックソフトウェアモジュールの状態変化の原因となった外部/内部のアクションを、MICROSAR AMD の Dbg ベーシック
ソフトウェアモジュールを使用して判別できます。Dbg モジュールは必要な MICROSAR ベーシックソフトウェアモジュールの内部変数を、XCP経由でマスターに送ります。
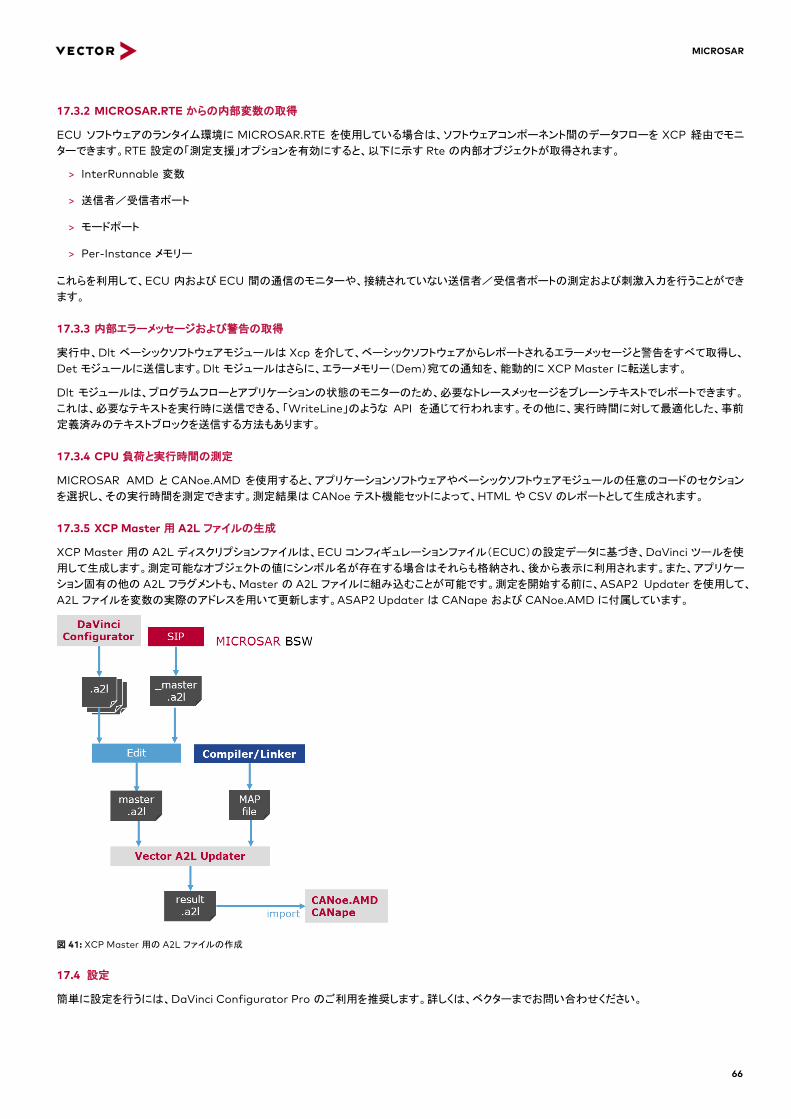
MICROSAR
66
17.3.2 MICROSAR.RTE からの内部変数の取得
ECU ソフトウェアのランタイム環境に MICROSAR.RTE を使用している場合は、ソフトウェアコンポーネント間のデータフローを XCP 経由でモニ
ターできます。RTE 設定の「測定支援」オプションを有効にすると、以下に示す Rte の内部オブジェクトが取得されます。
> InterRunnable 変数
> 送信者/受信者ポート
> モードポート
> Per-Instance メモリー
これらを利用して、ECU 内および ECU 間の通信のモニターや、接続されていない送信者/受信者ポートの測定および刺激入力を行うことができ
ます。
17.3.3 内部エラーメッセージおよび警告の取得
実行中、Dlt ベーシックソフトウェアモジュールは Xcp を介して、ベーシックソフトウェアからレポートされるエラーメッセージと警告をすべて取得し、
Det モジュールに送信します。Dlt モジュールはさらに、エラーメモリー(Dem)宛ての通知を、能動的に XCP Master に転送します。
Dlt モジュールは、プログラムフローとアプリケーションの状態のモニターのため、必要なトレースメッセージをプレーンテキストでレポートできます。
これは、必要なテキストを実行時に送信できる、「WriteLine」のような API を通じて行われます。その他に、実行時間に対して最適化した、事前
定義済みのテキストブロックを送信する方法もあります。
17.3.4 CPU 負荷と実行時間の測定
MICROSAR AMD と CANoe.AMD を使用すると、アプリケーションソフトウェアやベーシックソフトウェアモジュールの任意のコードのセクション
を選択し、その実行時間を測定できます。測定結果は CANoe テスト機能セットによって、HTML や CSV のレポートとして生成されます。
17.3.5 XCP Master 用 A2L ファイルの生成
XCP Master 用の A2L ディスクリプションファイルは、ECU コンフィギュレーションファイル(ECUC)の設定データに基づき、DaVinci ツールを使
用して生成します。測定可能なオブジェクトの値にシンボル名が存在する場合はそれらも格納され、後から表示に利用されます。また、アプリケー
ション固有の他の A2L フラグメントも、Master の A2L ファイルに組み込むことが可能です。測定を開始する前に、ASAP2 Updater を使用して、
A2L ファイルを変数の実際のアドレスを用いて更新します。ASAP2 Updater は CANape および CANoe.AMD に付属しています。
図 41: XCP Master 用の A2L ファイルの作成
17.4 設定
簡単に設定を行うには、DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。

MICROSAR
67
17.5 製品に含まれるもの
MICROSAR AMD には、以下のコンポーネントが含まれています。
> ソースコードとしてのソフトウェアモジュール
> A2L ジェネレーター(Windows XP/Windows 7 用)
> ベーシックソフトウェアモジュールディスクリプションファイル
> マニュアル類
17.6 その他の関連製品
MICROSAR AMD を使用するには、前提条件としてベクターの以下のソフトウェアモジュールが必要です。
> CAN、FlexRay、Ethernet については MICROSAR XCP を併用
> ベクターの VX1000 システム。スループットを最大化し、実行時間への影響を最小限に抑えるために、これらのご利用を推奨します。
VX1000 に関する情報は、ベクターWeb サイトに掲載しております(www.vector.com/jp/ja/products/products-a-z/hardware/vx1000/)。安全上の理由から、量産プロジェクトではほとんどの場合、測定やキャリブレーションのインターフェイスを有効の
ままにしておくことはできません。VX1000If モジュールを使用すると、測定およびキャリブレーションハードウェアである VX1000 のドライバ
ーを、量産時でも無効化した状態でベーシックソフトウェアに残しておくことができます。検査や開発の際は、API を通じてこの VX1000 ドライ
バーを再び有効化できます。量産品で使用する場合は、納入時にこのモジュールを MICROSAR.SIP に含めて、このユースケースの承認を
受けてください。ただし、VX1000If 使用時は、量産プロジェクトでもランタイム中に VX1000 ドライバーの有効化はできません

MICROSAR
68
18 MICROSAR ソリューション
以下では、先に触れたソリューションについて説明します。これらのクロスパッケージのソリューションには、多様なクラスターに属する多様なモジュ
ールが含まれます。ソリューションには、MICROSAR Safe、MICROSAR Security、MICROSAR Multicore、MICROSAR Variant Handling、MICROSAR Posix、MICROSAR Gateway、MICROSAR J1939、MICROSAR vVIRTUALtarget などがあります。
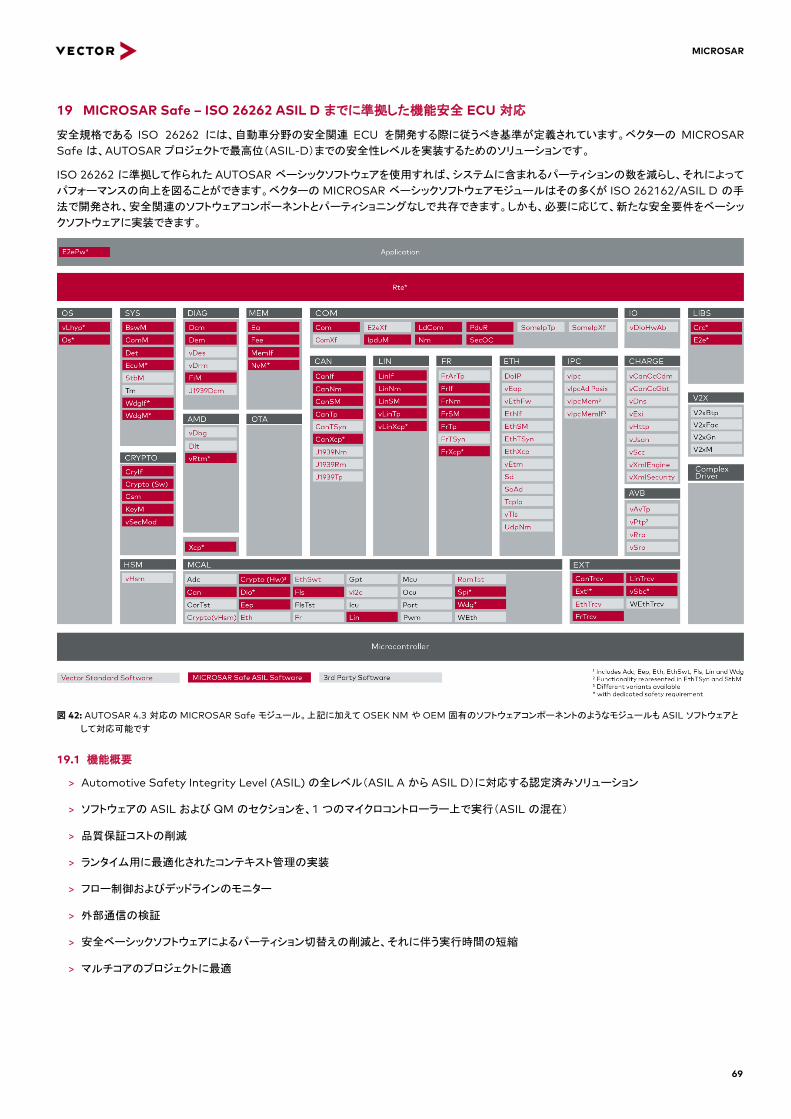
MICROSAR
69
19 MICROSAR Safe – ISO 26262 ASIL D までに準拠した機能安全 ECU 対応
安全規格である ISO 26262 には、自動車分野の安全関連 ECU を開発する際に従うべき基準が定義されています。ベクターの MICROSAR Safe は、AUTOSAR プロジェクトで最高位(ASIL-D)までの安全性レベルを実装するためのソリューションです。
ISO 26262 に準拠して作られた AUTOSAR ベーシックソフトウェアを使用すれば、システムに含まれるパーティションの数を減らし、それによって
パフォーマンスの向上を図ることができます。ベクターの MICROSAR ベーシックソフトウェアモジュールはその多くが ISO 262162/ASIL D の手
法で開発され、安全関連のソフトウェアコンポーネントとパーティショニングなしで共存できます。しかも、必要に応じて、新たな安全要件をベーシッ
クソフトウェアに実装できます。
図 42: AUTOSAR 4.3 対応の MICROSAR Safe モジュール。上記に加えて OSEK NM や OEM 固有のソフトウェアコンポーネントのようなモジュールも ASIL ソフトウェアと
して対応可能です
19.1 機能概要
> Automotive Safety Integrity Level (ASIL) の全レベル(ASIL A から ASIL D)に対応する認定済みソリューション
> ソフトウェアの ASIL および QM のセクションを、1 つのマイクロコントローラー上で実行(ASIL の混在)
> 品質保証コストの削減
> ランタイム用に最適化されたコンテキスト管理の実装
> フロー制御およびデッドラインのモニター
> 外部通信の検証
> 安全ベーシックソフトウェアによるパーティション切替えの削減と、それに伴う実行時間の短縮
> マルチコアのプロジェクトに最適
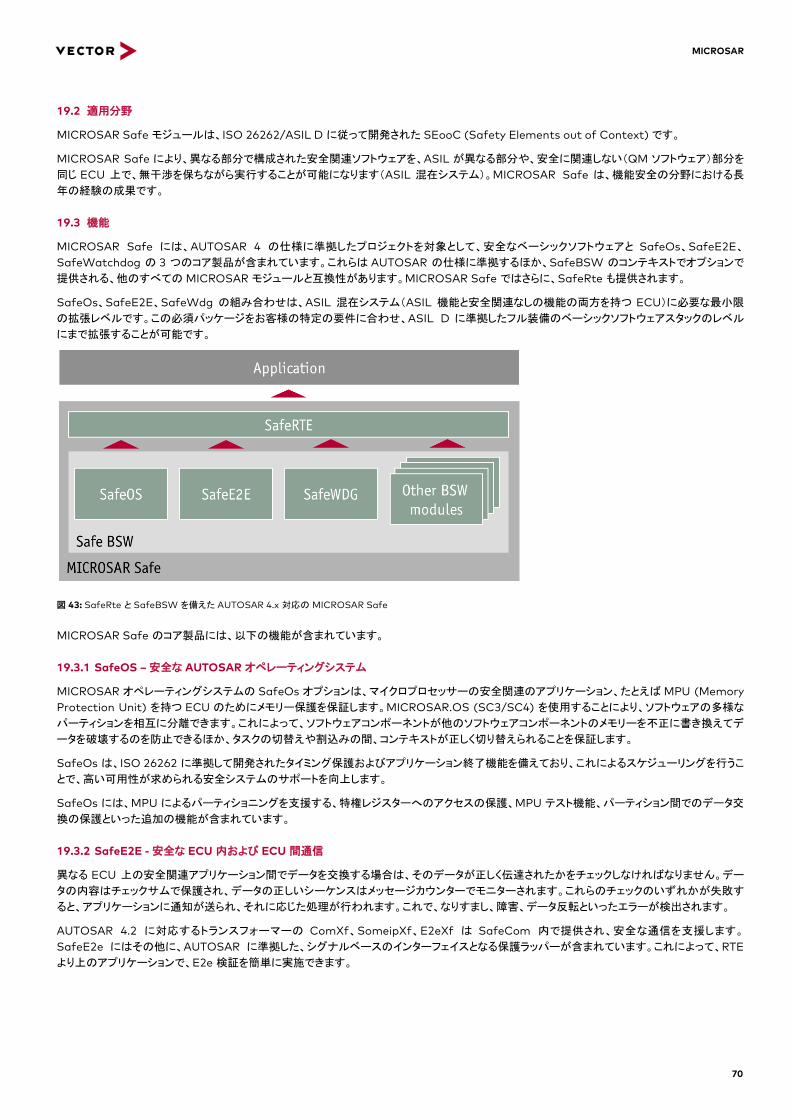
MICROSAR
70
19.2 適用分野
MICROSAR Safe モジュールは、ISO 26262/ASIL D に従って開発された SEooC (Safety Elements out of Context) です。
MICROSAR Safe により、異なる部分で構成された安全関連ソフトウェアを、ASIL が異なる部分や、安全に関連しない(QM ソフトウェア)部分を
同じ ECU 上で、無干渉を保ちながら実行することが可能になります(ASIL 混在システム)。MICROSAR Safe は、機能安全の分野における長
年の経験の成果です。
19.3 機能
MICROSAR Safe には、AUTOSAR 4 の仕様に準拠したプロジェクトを対象として、安全なベーシックソフトウェアと SafeOs、SafeE2E、
SafeWatchdog の 3 つのコア製品が含まれています。これらは AUTOSAR の仕様に準拠するほか、SafeBSW のコンテキストでオプションで
提供される、他のすべての MICROSAR モジュールと互換性があります。MICROSAR Safe ではさらに、SafeRte も提供されます。
SafeOs、SafeE2E、SafeWdg の組み合わせは、ASIL 混在システム(ASIL 機能と安全関連なしの機能の両方を持つ ECU)に必要な最小限
の拡張レベルです。この必須パッケージをお客様の特定の要件に合わせ、ASIL D に準拠したフル装備のベーシックソフトウェアスタックのレベル
にまで拡張することが可能です。
図 43: SafeRte と SafeBSW を備えた AUTOSAR 4.x 対応の MICROSAR Safe
MICROSAR Safe のコア製品には、以下の機能が含まれています。
19.3.1 SafeOS – 安全な AUTOSAR オペレーティングシステム
MICROSAR オペレーティングシステムの SafeOs オプションは、マイクロプロセッサーの安全関連のアプリケーション、たとえば MPU (Memory Protection Unit) を持つ ECU のためにメモリー保護を保証します。MICROSAR.OS (SC3/SC4) を使用することにより、ソフトウェアの多様な
パーティションを相互に分離できます。これによって、ソフトウェアコンポーネントが他のソフトウェアコンポーネントのメモリーを不正に書き換えてデ
ータを破壊するのを防止できるほか、タスクの切替えや割込みの間、コンテキストが正しく切り替えられることを保証します。
SafeOs は、ISO 26262 に準拠して開発されたタイミング保護およびアプリケーション終了機能を備えており、これによるスケジューリングを行うこ
とで、高い可用性が求められる安全システムのサポートを向上します。
SafeOs には、MPU によるパーティショニングを支援する、特権レジスターへのアクセスの保護、MPU テスト機能、パーティション間でのデータ交
換の保護といった追加の機能が含まれています。
19.3.2 SafeE2E - 安全な ECU 内および ECU 間通信
異なる ECU 上の安全関連アプリケーション間でデータを交換する場合は、そのデータが正しく伝達されたかをチェックしなければなりません。デー
タの内容はチェックサムで保護され、データの正しいシーケンスはメッセージカウンターでモニターされます。これらのチェックのいずれかが失敗す
ると、アプリケーションに通知が送られ、それに応じた処理が行われます。これで、なりすまし、障害、データ反転といったエラーが検出されます。
AUTOSAR 4.2 に対応するトランスフォーマーの ComXf、SomeipXf、E2eXf は SafeCom 内で提供され、安全な通信を支援します。
SafeE2e にはその他に、AUTOSAR に準拠した、シグナルベースのインターフェイスとなる保護ラッパーが含まれています。これによって、RTEより上のアプリケーションで、E2e 検証を簡単に実施できます。

MICROSAR
71
19.3.3 SafeWDG - 安全関連ソフトウェアコンポーネントのフロー制御
SafeWdg の WdgM モジュールは、安全関連機能の正しいタイミングと実行時の挙動をモニターします。これには、AUTOSAR 4.x で安全関連
アプリケーション用に特に定義されている、「Program Flow Monitoring(プログラムフローのモニター)」が含まれています。
SafeWdg パッケージは、WdgIf、Wdg resp. Wdg (EXT)の各モジュールを使用して、内蔵または外付ハードウェアのウォッチドッグへのインタ
ーフェイスを実装するほか、外部の SBC (System Basis Chip) もオンデマンドでサポートできます。
19.3.4 SafeRTE – 安全な ECU 内部通信
MICROSAR.RTE は、オペレーティングシステムの「SafeOs」オプションを介して、メモリーセクションのパーティショニングをサポートします。ISO 26262 では、ECU 内のアプリケーション間で安全な通信を確立するために、RTE の認定の取得が必要となっています。これを目的として、静的
解析ツールの「RTE Analyzer」がオプションで提供されています。
19.3.5 ハードウェアの検証
MICROSAR Safe のモジュールは、顧客プロジェクトに安全ハードウェアが存在することを前提としています。使用するハードウェアがこの要件を
満たさない場合は、ソフトウェアによる適切なテスト機能でそれに対応することもできます。このためには、そのプロジェクト独自の安全目標を考慮
しなければなりません。
SafeOs には、MPU に関連する補助機能がすでに用意されています。RAM、Flash、MPU、I/O などを検証するためのその他の機能は、プロジ
ェクト作業に応じてベクターから入手できます。
19.4 設定
MICROSAR Safe のベーシックソフトウェアモジュールの設定には、ベクターのツール「DaVinci Configurator Pro」のご利用を推奨します。
19.5 製品に含まれるもの
MICROSAR Safe は、AUTOSAR 4 の仕様に準拠して開発されています。どの MICROSAR Safe にも付属するベーシックソフトウェアモジュ
ールに加えて、ASIL 準拠で開発されたモジュールに必要なセーフティマニュアルが付属しています。納入されるソフトウェアパッケージは全体が 1つの SEooC にまとめられており、ベクターがプロジェクトに合ったセーフティケース文書を提供します。
MICROSAR Safe には AUTOSAR 3 プロジェクトに対応した製品も用意されているため、この仕様に準拠した ASIL 混在プロジェクトの実施が
可能になります。この場合の「無干渉」の特性は、安全コンテキスト切替え、実行時間測定、安全な外部通信をはじめとする MPU サポート機能に
よって実現されます。AUTOSAR 3 用の MICROSAR Safe には、SafeOs、SafeE2e、SafeWdg に加えて、SafeCrc が含まれています。
19.6 実装
安全関連の機能は、先に述べた MICROSAR Safe のコア製品によってサポートされます。これらは AUTOSAR 仕様に適合し、ISO 26262/ASIL D に準拠して開発されています。装備されている詳しい機能は以下の通りです。
パッケージ 内容
SafeOs > メモリー保護と safe context 切替え(MICROSAR.OS のオプション)
> タイミング保護(MICROSAR.OS のオプション)
SafeE2e > 保護ラッパー:エンドツーエンドの保護ラッパー
> ComXf、SomeipXf、E2eXf
> E2e(エンドツーエンドのライブラリー)
> Crc
SafeWdg > WdgM:Watchdog Manager
> WdgIf:Watchdog Interface
> Wdg:内部ウォッチドッグデバイス用のドライバー
> Wdg(EXT):外部ウォッチドッグデバイス用のドライバー
> vSbc:System Basis Chip デバイス用のドライバー(ウォッチドッグおよびトランシーバー機能)
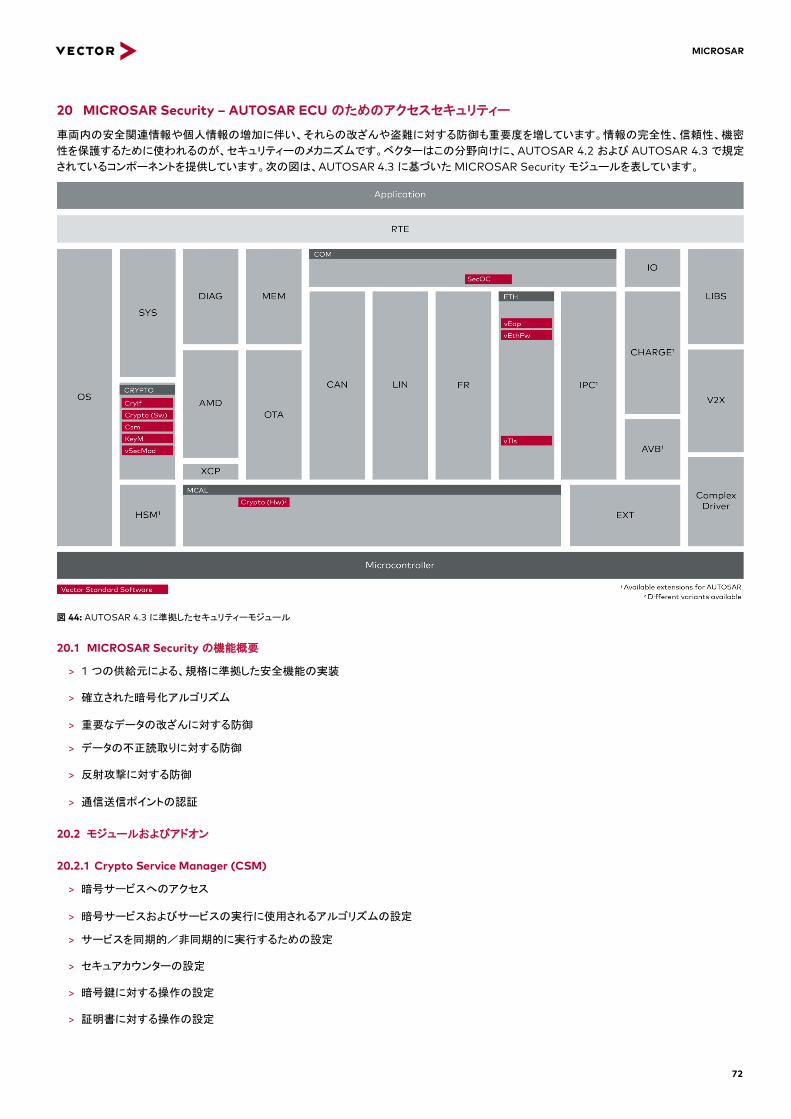
MICROSAR
72
20 MICROSAR Security – AUTOSAR ECU のためのアクセスセキュリティー
車両内の安全関連情報や個人情報の増加に伴い、それらの改ざんや盗難に対する防御も重要度を増しています。情報の完全性、信頼性、機密
性を保護するために使われるのが、セキュリティーのメカニズムです。ベクターはこの分野向けに、AUTOSAR 4.2 および AUTOSAR 4.3 で規定
されているコンポーネントを提供しています。次の図は、AUTOSAR 4.3 に基づいた MICROSAR Security モジュールを表しています。
図 44: AUTOSAR 4.3 に準拠したセキュリティーモジュール
20.1 MICROSAR Security の機能概要
> 1 つの供給元による、規格に準拠した安全機能の実装
> 確立された暗号化アルゴリズム
> 重要なデータの改ざんに対する防御
> データの不正読取りに対する防御
> 反射攻撃に対する防御
> 通信送信ポイントの認証
20.2 モジュールおよびアドオン
20.2.1 Crypto Service Manager (CSM)
> 暗号サービスへのアクセス
> 暗号サービスおよびサービスの実行に使用されるアルゴリズムの設定
> サービスを同期的/非同期的に実行するための設定
> セキュアカウンターの設定
> 暗号鍵に対する操作の設定
> 証明書に対する操作の設定
MICROSAR
73
20.2.2 Crypto Interface (CRYIF)
Crypto Interface (CryIf) モジュールにより、CSM のハードウェアベースおよびソフトウェアベースの暗号ソリューションの使用が可能になりま
す。これに必要な割当ての手法は、Crypto Interface によって管理されます。CRYIF モジュールは、以下のような多様な暗号ソリューションのた
めの、統一されたインターフェイスを提供します。
> Crypto (SW) モジュールから提供されるアルゴリズムのソフトウェアベースの実装
> Secure Hardware Extension (SHE) または Hardware Security Module (HSM) により、Crypto (HW) モジュールを介して実装され
る、ハードウェアベースの暗号機能
20.2.3 Crypto (SW)
Crypto (SW) モジュールは、CSM から供給される暗号化アルゴリズムおよび機能の実装をソフトウェアの形で提供します。処理のすべてがソフ
トウェア内で実行され、暗号化の操作を実行するための専用のハードウェアは不要です。
20.2.4 Key Manager (KeyM)
Key Manager は、車両の鍵管理手続きを実装するための標準化されたインターフェイスを提供するほか、証明書の検証と構文解析の機能も提
供します。また、CSM インターフェイスを使用して鍵と証明書を格納します。
20.2.5 Vector Security Module (vSecMod)
自動車メーカー固有の vSecMod には、以下の機能を持つ Freshness Value Manager (vFVM) と Key Management (vKeyM) が含まれて
います。
> vFVM:反射攻撃を防止するためのフレッシュネス値を SecOC コンポーネントに提供します。このモジュールは Secure Onboard Communication (SecOC) によって使用されます。そのため SecOS が必要になります
> vKeyM: 鍵交換と鍵更新を処理します 詳しくは、付属するプログラム関連のプロダクトインフォメーションに記載されている、自動車メーカー固有の修正の内容をご覧ください。
20.2.6 Crypto (HW)
Crypto (HW) モジュールは、ハードウェアトラストアンカー(HTA)経由で提供されるセキュリティー関連のアルゴリズムおよび機能にアクセスする
ためのドライバーとして動作します。Secure Hardware Extensions (SHE) や Hhardware Security Module (HSM) など、さまざまなタイプ
の HTA が利用できます。ベクターでは、使用するハードウェアプラットフォームとその派生物に応じて、以下のオプションを Crypto (HW) モジュ
ール用に用意しています。
> ベクターが開発した Crypto (HW) のインテグレーション
> 半導体メーカーが開発した Crypto (HW) のインテグレーション
ベクターでは、Crypto (HW) 専用の実装として、暗号モジュールの Vector Hardware Security Module (vHsm) をオプションで提供していま
す。ベクターの vHsm には、ここで CSM に必要になるアルゴリズムが含まれています(詳しくは、次の MICROSAR.HSM の章をご覧ください)。
20.2.7 Secured OnBoard Communication (SecOC)
SecOS モジュールは Authenticated Messaging(認証済みメッセージング)とも呼ばれ、2 つの ECU 間の通信を認証するために使用されま
す。この検証によって、第三者が割り込んだり、正しい通信相手とすり替わったりするなどの事態を防ぎ、他者からの介入による操作を防止できま
す。SecOC は PDU ルーターとやり取りしますが、その相互作用はアプリケーションによって制御できます。このモジュールは以下の機能を備え
ています。
> 完全な状態に保護された、認証済みの I-PDU の送受信
> メッセージ認証コード(MAC)による認証。メッセージ認証コードの実際の生成および検証は、CSM によって行われます
> リプレイアタックの防止。ここでは「フレッシュネス値」というカウンターが使用されます。この値は独立したコンポーネントである Freshness Value Manager (FVM) によって生成されます。フレッシュネス値を生成するためのさまざまな手法がサポートされています
MICROSAR
74
20.2.8 Vector Ethernet Firewall (vEthFw)
Ethernet Firewall (vEthFw) により、Ethernet 通信用のファイアウォールが実装されます。その主なタスクは、送受信されるデータトラフィック
から好ましくないものをブロックし、ネットワーク全体のセキュリティーを強化することです。
Ethernet Interface (ETHIF) モジュールは vETHFW モジュールへの追加を可能にし、ファイアウォールが現在の Ethernet フレームをチェッ
クして、設定されている一連の規則に適合しない場合はそれを拒否できるようにします。vEthFw モジュールでは、各種のデータトラフィック
(IPv4/IPv6、AVB、RAW Ethernet)およびレイヤー(UDP、TCP、RAW Ethernet)にフィルター規則を指定できます。
20.2.9 Vector Internet Security (vIpSec)
アドオンの vIpSec では、IETF RfC 4301 に準拠した IPsec 通信を確立できます。この機能は転送モードと RfC 4302 にのみ準拠した
Authentication Header の使用に限定されています。Authentication Header によってペイロードのデータ整合性が確保され、データ認証が
可能になりますが、機密性は保たれません。
20.2.10 Vector Transport Layer Security (vTls (Client))
このモジュールには Transport Layer Security クライアントが含まれています。TCP ベースの通信は vTls で暗号化されます。使用する暗号化
アルゴリズムは選択可能です。
20.2.11 Vector Hardware Security Module (vHsm)
vHsm について詳しくは、次の MICROSAR.HSM の章をご覧ください。
20.3 設定
MICROSAR Security のモジュールの設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクター
までお問い合わせください。

MICROSAR
75
21 MICROSAR.HSM – ベクターの Hardware Security Module 用ソリューション
MICROSAR.HSM クラスターには、一連のサブモジュールのパッケージである、vHsm モジュールが含まれています。この vHsm は、さまざまな
半導体メーカーの Hardware Security Module (HSM) に対応するためのベクターのソリューションです。このソリューションを利用することによ
り、ユースケースと要求に応じた、簡単かつ幅広い設定が可能になります。このソリューションは入手可能なハードウェアアクセラレーターを使用し、
マイクロコントローラーの独立したセキュアコア上で暗号サービスを実行させます。
次の階層図は、vHsm ソリューションに関連するモジュールの概要を表しています。vHsm にはさらに、暗号ドライバーの Crypto(vHsm)も必要
です。vHsm のアーキテクチャーの詳しいビューについては、モジュールおよびアドオンのセクションをご覧ください。
図 45: AUTOSAR 4.3 対応の MICORSAR HSM クラスター
vHsm は暗号のためのさまざまな機能と特徴を備えています。これについては以下のセクションで詳しく説明します。これは HSM 用のスタンドア
ローンのパッケージで、スケジューリングと暗号ジョブの処理が含まれています。Crypto(vHsm)ドライバーと組み合わせることにより、
AUTOSAR アプリケーションスタックとのインターフェイスに必要なすべてのパーツが得られます。
21.1 MICROSAR.HSM の機能概要
> vHsm により、セキュアコアからアプリケーションコアへの暗号マテリアルの移動を回避できる
> vHsm はモジュール式のアーキテクチャーを備えているため、パフォーマンスやフットプリントの要求に応じたユーザー設定が可能
> HSM で実行できる大規模な暗号化アルゴリズムのライブラリーが付属
> vHsm はソースコードとして提供され、包括的な設定ツールとデバッグ機能も同梱
21.2 適用分野
MICROSAR.HSM クラスターにより、暗号操作を分離できるだけでなく、ハードウェアアクセラレーションも使用できるようになります。vHsm は、
セキュアコアを持つ HSM が統合されたマイクロコントローラー上での使用を想定しています。そのため、AUTOSAR スタックがアプリケーションコ
ア上で実行されるのに対し、vHsm はセキュアコア上で、独立したメモリー(フラッシュおよび RAM)を使い、AUTOSAR スタックとは別に分離して
実行されます。
vHsm と AUTOSAR スタックとの通信は、暗号ドライバーの Crypto(vHsm)によって完全に抽象化および管理されます。Crypto(vHsm)はMICROSAR ベーシックソフトウェアの一部で、AUTOSAR 4.3 に準拠しています。

MICROSAR
76
AUTOSAR スタックとの統合により、開発エラーを HSM 上の DET プロキシー経由で AUTOSAR スタックの DET にレポートできます。さらに、
エラーを安全なデータフラッシュに書き込み、アプリケーションで読み出すことができます。
vHsm のユースケースには、セキュアブートや Secure OnBoard Communication (SecOC) などのための鍵管理に加えて、暗号化アルゴリ
ズムの効率的な処理と高速化が含まれます。
21.3 機能
vHsm には広範な機能と暗号化アルゴリズムが付属しており、それらをセキュアコア上のソフトウェアで、あるいはハードウェアで高速化して、
HSM 上で実行できます。
21.3.1 鍵ストレージ
> HSM 内の安全なストレージ(対称/非対称鍵、証明書、走行距離やフレッシュネス値などのその他のセキュリティー関連データを格納)
> SHE 1.1 に準拠した対称鍵のインストール
> 鍵ストレージを自由に選択(フラッシュまたは RAM)
> 冗長性のある、リセット保護されたストレージ
> スタートアップ時に鍵をプリロード/キャッシュするため、使用のたびに鍵を読み込まずに済む
> セキュアブートが完了するまで鍵をロック可能
> 鍵をライトワンスに設定可能
> 鍵を即座に永続化するか、または複数の鍵を後から一括で永続化できる(スピードの最適化とフラッシュアクセスの量の削減が可能)
21.3.2 セキュアブートのサポート
> セキュアブートと認証済みブートのサポート
> 複数のジョブ/フェーズへの分割が可能
> ブートローダーの検証などの目的で、1 つのジョブを自動的に開始
> ブートローダーで 1 つ以上のジョブを追加で開始可能(逐次または並列セキュアブート)
> 障害時のセキュアブートの措置を設定可能(システムのリセット、ロギングのみ、鍵を解除しないなど)
21.4 モジュールおよびアドオン
vHsm ソフトウェアスタックは、AUTOSAR に準拠したモジュールを一部利用してはいますが、AUTOSAR 仕様では規定されていません。そのた
め、vHsm はベクターの標準ソフトウェアだけでなく、複数の専用モジュールから構成されています。
このセクションでは、MICROSAR.HSM 内部のアーキテクチャーとその機能体系の概要を説明します。さらに、利用可能なアドオンについても説
明します。
21.4.1 vHsm に含まれるモジュール
> vHsm – Vector Hardware Security Module コア
vHsm は vHsm ソリューションの鍵となるコンポーネントです。これには以下の機能が装備されています。
> AUTOSAR の暗号ドライバーCrypto(vHsm)から届いた暗号ジョブの受理
> 届いた暗号化ジョブの評価と、対応するサブモジュールおよびドライバーへのディスパッチ(暗号化アルゴリズムの処理と鍵管理のジョブ
タイプをサポート)
> 不揮発性メモリーに対する読取り/書込みの管理
> vHsm_Hal – vHsm ハードウェア抽象レイヤー
vHsm_Hal はマイクロコントローラー内の HSM のハードウェアを抽象化し、ハードウェアで高速化されたアルゴリズム(CMAC、AES、TRNG など)を提供します。
> vHsm_Core – vHsm ソフトウェア認証
vHsm_Core はセキュアブートおよび安全なソフトウェアダウンロードのための機能を提供します。

MICROSAR
77
> vHsm_Custom – vHsm カスタム拡張
vHsm_Custom は、カスタム拡張を実装するためのテンプレートを提供します。
さらに、vHsm スタックはベクターの以下の標準ソフトウェアモジュールを使用します。
> CryIf、Crc、Crypto(Sw)、Det、Fee、MemIf、FlsDrv
21.4.2 アドオン
vHsm ではアドオンとカスタマイズはオプションで提供されます。中でも、特別なユーザー機能を組み込んで、特定のユースケース要求を満たすた
めに提供されるのが、暗号ドライバーの vHsm_Custom です。これは AUTOSAR に準拠した暗号ドライバーのテンプレートで、内容の設定と追
加はユーザーが行う必要合があります。ご要望に応じて、ベクターが追加の機能を組み込むこともできます。
アドオン
> vHsm Asymmetric Crypto
> 非対称暗号化アルゴリズムの提供
> RSA および ECC の署名の生成と検証
> 非対称鍵の安全な格納と更新
> vHsm Updater
> vHsm を更新する機能を提供(HSM のデータフラッシュの更新用ではありません)
> 独立したモジュールで提供され、独立したバイナリーとして HSM コードフラッシュに置く必要がある
> 保護された vHsm(暗号化および署名済み)の更新が可能
21.4.3 統合シナリオ
MICROSAR.HSM を統合し、利用する際のシナリオには、大きく分けて 2 つのパターンがあります。MICROSAR.HSM はベクターの
MICROSAR と一緒に使用できますが、AUTOSAR 4.3 に準拠したあらゆるサードパーティーの AUTOSAR スタックとの互換性も備えています。
図 46 は vHsm と AUTOSAR スタックおよびフラッシュブートローダー間の相互作用を表しています。
図 46: vHsm、AUTOSAR、フラッシュブートローダーの統合シナリオ
21.4.3.1 vHsm とベクターの MICROSAR
この構成では、vHsm はベクターの MICROSAR と組み合わせて使用されます。これはシングルソースのソリューションであるため、vHsm と
MICROSAR があらかじめ統合されているだけでなく、組み込まれたコードとツールのレベルで最適な相互作用が実現します。
この構成では、納入物には以下が含まれます。
MICROSAR
78
> vHsm Software Integration Package (SIP) およびソースコード
> 暗号ドライバーCrypto(vHSM)が含まれた MICROSAR SIP
> vHsm と MICROSAR を設定するための DaVinci Configurator Pro
21.4.3.2 vHsm とサードパーティーの AUTOSAR
この構成では、vHsm は AUTOSAR 4.3 に準拠したサードパーティーのスタックと組み合わせて使用されます。
注:vHsm をサードパーティーの AUTOSAR スタックと使用する場合は、vHSM と AUTOSAR の設定の整合性が保たれるよう、ユーザー自身
が特に注意しなければなりません。このケースでは、ベクターではツールのサポートを提供できません。
この構成では、納入物には以下が含まれます。
> vHsm Software Integration Package (SIP) およびソースコード
> アプリケーションコア用の暗号ドライバーCrypto(vHSM)(AUTOSAR 4.3 準拠)
> vHsm を設定するための DaVinci Configurator Pro
21.4.3.3 vHSM とフラッシュブートローダー
この構成では、vHsm はベクターのフラッシュブートローダー(FBL)と組み合わせて使用されます。これには以下に示すように、いくつかのメリット
があります。
> ベクターのフラッシュブートローダーとのシームレスな統合により、セキュアブートのユースケースなどに利用できる
> vHsm と FBL をベクターでより詳細にテストし、事前統合できる
> ツールのサポートが簡素化される
> フラッシュブートローダーだけでなく、vHsm にも DaVinci Configurator を使用できる
この構成では、納入物には以下が含まれます。
> vHsm Software Integration Package (SIP) およびソースコード
> フラッシュブートローダーSIP
> vHsm と FBL を設定するための DaVinci Configurator Pro
21.5 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。DaVinci Configurator Pro を使用すれば、MICROSAR の設定の整合性を簡単に確保できます。

MICROSAR
79
図 47: DaVinci Configurator Pro による MICROSAR.HSM (vHsm) の設定

MICROSAR
80
22 MICROSAR Gateway – ゲートウェイ ECU 用のベーシックソフトウェア
ゲートウェイ ECU は、車両のネットワークアーキテクチャーの中心となる ECU です。そしてそのアーキテクチャーは多くの場合、異なる複数の通
信ネットワークから構成されています。ここでのゲートウェイの役割は、さまざまなネットワークを相互に接続し、分散した、しかも種類の異なるネット
ワーク上に存在する ECU 間のデータ転送を可能にすることです。ゲートウェイの性能には、データスループットの高さとリソース負荷(特に RAMと CPU の使用率)の低さという相反する特性から、伝送時のレイテンシーの低さに至るまで、幅広い指標があります。
ベクターは、異なるプロトコルレベルや別の種類のバスシステム(CAN、LIN、FlexRay、Ethernet)へのルーティングを可能にする、ゲートウェイ
用に最適化されたモジュールを提供しています。MICROSAR Gateway はそのような基本機能をベースに、サブネットワークのミラーリングや、
既存の機能を拡張するモジュールのプラグインなど、数々の専用機能を装備しています。この基本機能、専用機能、拡張性という 3 段階のアプロ
ーチにより、MICROSAR Gateway はそれぞれのアプリケーション事例に柔軟に対応することができます。
ゲートウェイのパフォーマンスを最適化するために、MICROSAR Gateway の一定の部分は、独立したアーキテクチャーに準拠しています。それ
らの箇所は AUTOSAR Architecture Conformity Class 2 (ICC2) の要求を満たしているため、AUTOSAR のソフトウェアコンポーネントの組
込が可能となっています。
図 48: MICROSAR のマルチレイヤーゲートウェイ
22.1 MICROSAR Gateway の機能概要:
> 異なるプロトコルレベルでのルーティング(PDU、上位 TP、PDU セクション、シグナル)
> 異なる種類のネットワーク間のルーティング(CAN、LIN、FlexRay、Ethernet)
> 各種バッファーの柔軟な設定(受信 FIFO キュー、送信 FIFO キュー、プライオリティーキュー)
> 各種処理の柔軟な設定(割込み、タスク)
> ルーティング関係をビルド後に読み込むことのできる柔軟な設定
> 診断用サブネットワークのミラーリング(CAN および Ethernet)
> NM コーディネーターに関するサポートの拡張
> 入力データ(.dbc、.ldf、.fibex、.arxml 形式およびプロプライエタリの形式)を自動処理するためのツールチェーン
> ツールチェーンの拡張(スクリプト、拡張機能)およびベーシックソフトウェアの拡張(Cdd のサポート)を目的とした定義済みインターフェイス
> ベクターと Tier 1 との密な連携によりオプションで提供される、ゲートウェイプロジェクトへのプロジェクト関連のサポート
22.2 適用分野
MICROSAR Gateway では、データを最適なプロトコルレベルで、CAN、LIN、FlexRay、Ethernet などのネットワークにルーティングするのに
必要なベーシックソフトウェアが提供されます。このような柔軟なアプローチを通じ、MICROSAR Gateway は以下の開発に使用できます。
> ローカルゲートウェイ(ドアエリアなど)

MICROSAR
81
> ドメインコントローラー(ボディコントローラーなど)
> セントラルゲートウェイ(セントラルダイアグアクセス、通信アプリケーション用など)
22.3 機能
> 異なるプロトコルレベルでのルーティング
> PDU ルーティング(インターフェイスレベル):
> メッセージおよび PDU レベルでの効率的なイベントベースのルーティング
> 各種のバッファー処理のサポート(Last-is-best、FIFO、プライオリティーベース)
> 「コンテナ内 PDU」(SoAd および IpduM)のルーティング
> サポートされるネットワーク:Ethernet、CAN、LIN、FlexRay
> 上位 TP ルーティング
> 異なる転送プロトコル間のルーティング
> 時間ベースのフロー制御および帯域幅管理による伝送のセグメント化
> 専用のバッファー処理:「オンザフライルーティング」、「要求キュー」、「バッファー共有」
> サポートされるネットワーク:Ethernet、CAN、LIN、FlexRay
> PDU セクションルーティング(記述ベースのルーティング)
> スタートビット、ターゲットビット、および長さで定義される、PDU 内のデータセクションの効率的なルーティング
> 様々な送信制御(周期的な送信、データ変更時の送信、タイムアウトへの反応、最小 Tx 間隔など)
> サポートされるネットワーク:ネットワークに依存しないルーティング
> シグナルベースルーティング
> 圧縮解除されたデータシグナルのルーティング
> 様々な送信制御(周期的な送信、データ変更時の送信、タイムアウトへの反応、最小 Tx 間隔など)
> 変換を実行するためのオプション(エンディアン、シグナル長、シグナルの内容)
> サポートされるネットワーク:ネットワークに依存しないルーティング
図 49: 異なるプロトコルレベルでのルーティング
> 拡張可能なベーシックソフトウェア(プラグインアーキテクチャー)
> ユーザー独自のソフトウェアをデータフローに効率的に統合(AUTOSAR 準拠の Complex Device Driver (Cdd) で実装)

MICROSAR
82
> 設定ツールでの Cdd の設定
> Cdd をベーシックソフトウェアに統合するためのテンプレートの生成
> Cdd はインターフェイス上位、PDU ルーター下位、PDU ルーター上位に統合可能
> ユーザーのソフトウェアを制御フローに統合するためのコールアウト(多くの場合はデータに影響を及ぼすオプションも含まれます)
> ゲートウェイの最適化
> 遅延イベントキャッシング:COM レベルでの受信イベントの効率的な処理
> タイミングドメイン:COM レベルでの送信イベントの効率的な処理
> 記述ベースのルーティング:データセクションの効率的なルーティング
> 動的ルーティング
> 診断ルーティングの学習:診断応答の受信などから学習した ECU の状態に基づく診断要求のルーティング
> AUTOSAR のメタデータ機能を使用して CAN ID の一部をルーティングするなど、CAN ID に基づくルーティング
> ミラーリング
> 内部 CAN または LIN チャンネルの診断用 CAN へのミラーリング
> 複数の CAN/LIN ネットワークと、1 つの FlexRay(A+B チャンネル)ネットワークの、診断用 Ethernet へのミラーリング
> NM のコーディネーション
> ビルド後:ECU 全体をリプログラムせずにゲートウェイ設定を更新可能。ビルド後の動作についての詳細は、「MICROSAR バリアントハンド
リング」のセクションをご覧ください
22.4 設定
ゲートウェイには、多岐にわたる設定が必要になることが少なくありません。そのため、ベーシックソフトウェアを自動車メーカーから提供された入
力データに従い、自動的にパラメーター化できることが特に重要になります。ベクターの設定ツール、DaVinci Configurator Pro は、以下のよう
な多様な方法による自動的なパラメーター化をサポートします。
> AUTOSAR System Extract (.arxml) による設定:AUTOSAR で定義されたデータ形式では、ルーティング情報の明示的な指定が可能で
す。この情報を DaVinci Configurator Pro に読み込み、ソフトウェアの設定に変換します
> ネットワークファイルの拡張による設定:一般に独自のネットワークファイル(.dbc/.ldf/.fibex)には、ルーティング情報を指定する機能があり
ません。ただし、DaVinci Configurator Pro では、各種の補助的な属性を解釈したり、規則を評価(シグナルの命名に同じものがないかな
ど)するなどして、ルーティング情報を導出することが可能です
> 独自データ(.xls など)による設定:ベクターのツールチェーンには、ファイルを別途追加してルーティング情報を定義するオプションも用意され
ています。このファイルを用いて、ベクター指定の XML 形式(VSDE:Vector System Description Extension)のネットワークファイルに
記録されているメッセージとシグナルの関係を定義できるため、ルーティング関係の指定が可能になります。VSDE ファイルは独自のルーテ
ィング設定をツールチェーンに統合するのに特に適しています。これには、独自ファイルを VSDE ファイルに転送する、変換ルーチンの実装
が必要です
> スクリプト機能:上記の方法をスクリプトソリューションと組み合わせることもできます。DaVinci Configurator Pro のオプション WF (Workflow) を使用すれば、自分のプロジェクト専用のスクリプトを作成し、プログラミングでそれを使用して、ルーティング情報を補うことが
できます
これらの方法で生成されるソフトウェア設定は、その 1 回のプロセスでしか使用できないものではありません。入力ファイルのネットワーク記述が
変更された場合、ソフトウェア設定を自動的に更新させることができます。

MICROSAR
83
図 50: DaVinci Configurator Pro でゲートウェイ用ベーシックソフトウェアを自動設定するためのオプション
DaVinci Configurator Pro では、パラメーターを自動設定するだけでなく、手動で設定することもできます。詳しくは、ベクターまでお問い合わせ
ください。
22.5 プロジェクトサポート
ゲートウェイ ECU の場合、それに対する要求が自動車メーカー固有仕様とアプリケーション仕様にまたがるケースがとりわけ多く、通常の製品で
それらに完全に対応することは一般に不可能です。しかし、ベクターは次の 2 段階のアプローチを通じ、お客様のプロジェクトにおけるこれらの要
求に効率的に対応します。
> まず、MICROSAR Gateway はプラグインの形で数多くの拡張機能をサポートします。これを使用することにより、お客様での独自開発ソフ
トウェアや、サードパーティーのサプライヤーから調達したソフトウェアを統合できます
> さらにオプションの 1 つとして、ベクターがお客様と共同し、プロジェクトの要求に対処するサービスも用意されています。これにより、リリース
サイクルに拘束される製品からのアプローチよりも、お客様の要求をはるかに柔軟に実装することが可能になります。共同プロジェクトの一環
として、お客様の要求に沿った製品拡張の実装も承ります
図 51: 最適な開発サポートのための 3 階層のアプローチ

MICROSAR
84
23 MICROSAR Multi-core – マルチコアプロセッサー用の AUTOSAR ソリューション
マルチコアプロセッサーの導入は、そのダウンストリームにあたる AUTOSAR ソフトウェアの設計にも変化をもたらしました。今日では、個々の
AUTOSAR アプリケーションを各プロセッサーに分配し、同時に操作することが可能となっています。これを効果的に行うには、待機時間などによ
る同期のロスを最小限に抑えた、的確な分配が何よりも大切です。この作業を包括的に支援するのが、MICROSAR Multi-core です。
23.1 MICROSAR Multi-core の機能概要
> MICROSAR Multi-core を MICROSAR パッケージに完全にインテグレーションされますが、その機能は主に MICROSAR.OS および
MICROSAR.RTE によって実現されます。これには以下のような利点があります
> すべてのプロセッサーコアに対応できる単一の OS 設定
> RTE での実行時間の短縮とメモリー使用量の削減に有効な、効率的なスピンロックとメモリー共有
> MICROSAR Multi-core とベクターの MICROSAR Safe ソリューションとの緊密な連携:すべてのマルチコア機能が MICROSAR の安
全コンセプトとシームレスに適合
> MICROSAR Multi-core が AUTOSAR ベーシックソフトウェアをスレーブのプロセッサーコアに実装し、最適な時間配分でサービス機能を
処理
> Mixed ASIL Partitioning & BSW Split により、ベーシックソフトウェアのランタイムの一部を別のコアに移し、そのベーシックソフトウェア
が実行されているコアの負荷を軽減可能。また、ASIL 混在システムの通信クラスターのパーティショニング(CAN および Ethernet のスタッ
クが別々のパーティションに含まれる場合など)もサポート
> 容易な設定
> MICROSAR Multi-core は個々の MICROSAR モジュールで利用可能
> ベクターの TA Tool Suite を使用することにより、CPU コア間の負荷分散、各処理の応答時間、コア間通信の削減などの点で、アプリケー
ションを効率的に最適化
23.2 適用分野
MICROSAR Multi-core は、既存のプロセッサーコアを以下のようなアプリケーションで動作させるために使われます。
> ベーシックソフトウェアは既存のコアのいずれか 1 つの上で実行される
> アプリケーションソフトウェアは利用可能などのコア上にも任意に分配できる
この手法の目的は、複数のプロセッサーコアにアプリケーションを分配し、CPU の使用効率を最大化することにあります。MICROSAR Multi-core は、以下の機能を通じてこれを実現します。
> すべてのプロセッサーコアがベーシックソフトウェアのサービスを利用できるようにする、実行時間を効率化したメカニズム
> 必要に応じて、スレーブのプロセッサーコアにベーシックソフトウェアのサテライトを実装
> Rte の標準のメカニズムを使用してベーシックソフトウェアのサービスを共有し、それによって実行時間の最適化とメモリー使用量の最小化を
図る
このマルチコアの手法は、MICROSAR Safe ソリューションでも利用できます。
23.3 機能
23.3.1 Rte
マルチコア環境では、実行時間とメモリー使用量を最小限に抑えられるという点で、共有メモリーの使用は MICROSAR.RTE にとって有利です。
データの整合性の保証には、必要に応じてスピンロックが使用されます。そのため、プロセッサーコアの待機時間は同じメモリー範囲に同じタイミン
グでアクセスが発生した場合にしか生じません。
23.3.2 オペレーティングシステム
関与するすべてのプロセッサーコアに対し、必要な OS 設定は 1 つのみです。MICROSAR Multi-core が持つ、AUTOSAR 仕様に含まれてい
ない機能の 1 つに、スピードアップしたスピンロック API があります。この機能により、データをどこからでもアクセス可能なメモリー領域に置くこと
ができます。

MICROSAR
85
23.3.3 ECU Manager (ECU マネージャー)
ECU Manager (ECU マネージャー)はメインのプロセッサーコア上で動作します。コア間の調整はその他の各コア上にあるサテライトが処理しま
す。すなわち、EcuM についても必要な設定は 1 つのみで、その設定はどのプロセッサーコアでも有効です。
23.3.4 Watchdog Manager (ウォッチドッグマネージャー)
Watchdog Manager (ウォッチドッグマネージャー)もメインのプロセッサーコア上で動作します。その他すべてのコア上にはサテライトが置かれ
ており、それがアプリケーションの「チェックポイント到達済み」の機能を処理するとともに、そのステータスをマスターと同期します。こうすることによ
り、WdgM のサービス機能が、最適な実行時間で処理されます。
23.3.5 Diagnostic Event Manager
Diagnostic Event Manager はマスター-サテライトのパターンを実装し、以下の両方を可能にします。
> 診断イベントステータスの読込み/書込み用の API をコアローカルに置くことにより実行時間を効率化したマルチコアアーキテクチャー
> Dem エンティティーがアプリケーション SWC と同じ ASIL レベルで実行される、ASIL 混在システム
23.3.6 Mixed ASIL Partitioning & BSW Split
Mixed ASIL Partitioning & BSW Split により、ベーシックソフトウェアのランタイムの一部を別のコアに移し、そのベーシックソフトウェアが実行
されているコアの負荷を減らすことができます。この負荷軽減は 1 つ以上のバスシステムに委託することによって、具体的には、負荷を減らしたい
コアのメイン機能と割込みを別のコアに移すことで実現されます。ただし、これによってベーシックソフトウェアがスピードアップしたり、スタックの効
率が向上したりするわけではなく、しかもコア間の通信によるレイテンシーやオーバーヘッドも発生します。そのため、必ずしも負荷軽減を達成する
とは限りませんが、条件がそろえば、この機能によって過負荷状態のシステムを安定化させることができます。
23.4 設定
23.4.1 Os の設定
OS を実行するプロセッサーコアは、設定時に静的にに定義されます。OS アプリケーションが設定され、それぞれが特定の 1 つのコアに割り当て
られます。タスク、割込み、OS アプリケーションへのアラームなどの OS オブジェクトが配置されることにより、コアに対するそれらのメンバーシッ
プが最終的に確定します。
23.4.2 RTE の設定
RTE はどのソフトウェアがどのプロセッサーコアで動作しているかを知る必要があります。それが把握できたうえで、Rte は以下を実行できます。
> データ交換における整合性の保証
> 必要に応じて、複数のプロセッサーコア上のランナブルをアクティブ化
設定プロセスでは、個別のランナブルを OS タスクにマッピングした後、それらのタスクを OS アプリケーションに割り振ります。これらの OS アプリ
ケーションがそれぞれ、特定のプロセッサーコアに改めてマッピングされます。
図 52: ソフトウェアコンポーネント、タスク、OS インスタンスのプロセッサーコアへのマッピング - 概念図
MICROSAR
86
ECU の設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。製品に関する情報は、ベクターWeb サイトに掲載
しておりますので是非ご覧ください。www.vector.com/jp/ja/products/products-a-z/software/davinci-configurator-pro/
23.5 製品に含まれるもの
この製品には、MICROSAR パッケージに含まれるモジュールのうち、マルチコアのプロジェクトに関連するモジュールがすべて同梱されています。
一部のモジュールは、マルチコアにより効率的に対応できるよう、特別に修正されています。
> マスター-サテライトモジュール:WdgM / WdgIf、Dem、EcuM、Xcp、Rtm、Det
> アプリケーションプロキシー: NvM、Com

MICROSAR
87
24 MICROSAR バリアントハンドリング – AUTOSAR の柔軟なコンフィギュレーションのためのソリューション
ECU 開発における従来の作業分担では、自動車メーカーが通信と診断のインターフェイスを定義し、サプライヤーがそれらの要件に従って、ECUを実装およびビルドします。ECU の納入後にパラメーターの変更が必要になれば、サプライヤーは新しいバージョンの ECU を開発しなければな
りません。変更が些細なものである場合、この開発チェーンによって時間と経費が無駄に費やされることになります。比較的変更の多いベーシック
ソフトウェアを用いる ECU の開発では特に、Post-Build Loadable がもたらす柔軟性の向上は効果的です。
また、車載 ECU 開発において、多種多様なバリアントで実装される ECU の数は増加しており、それらはマルチプル ECU として知られています。
こうした状況の中でユーザーにとってメリットとなるのは、1 台でさまざまな適用分野で使用できるハードウェアを備えることです。こうしてハードウェ
アのコストや管理の手間を減らし、その分、ソフトウェア開発および生産やサービスのためのソフトウェアバリアント管理に力を注ぐことができます。
このようなユースケースには、オプションの MICROSAR Identity Manager に付属する、適切な Post-build selectable ソリューションを使用
できます。
24.1 Post-Build Loadable – ベーシックソフトウェア特性のポストビルド修正
24.1.1 機能概要
> ベーシックソフトウェアの多くのパラメーターを、自動車メーカーが直接修正可能
> 開発とテストの枠組みの中で、ベーシックソフトウェアを柔軟かつ自発的に修正
> コンパイラー(コンパイラーのライセンス)の使用が不要なポストビルド更新
> リソースを集中管理することにより、他の要素を追加してベーシックソフトウェアの設定を柔軟に拡張可能
> DaVinci Configurator Pro の専用の拡張機能が、円滑なポストビルド設定を約束
> MICROSAR ベーシックソフトウェアと DaVinci Configurator Pro の整合性チェックにより安全性を最大化
> AUTOSAR に準拠した、実績ある MICROSAR ベーシックソフトウェアを広範に活用し、アプリケーションのアーキテクチャーの変更は不要
> Post-Build Loadable は、多数のベーシックソフトウェアモジュールおよび機能のオプションとして提供可能です
24.1.1.1 適用分野
Post-Build Loadable では、診断および通信分野に関わるベーシックソフトウェアの特定の特性を、ECU のビルド後に修正することが可能です。
ポストビルド時に CAN ID、送信タイプ、デフォルト値などのパラメーターを修正するほか、ECU に新しいオブジェクトを導入することもできます。た
とえば、新しいメッセージやシグナルを追加してゲートウェイのルーティングテーブルを拡張できます。
ポストビルドの時点でベーシックソフトウェアのパラメーターを適合する場合、必要になるのは MICROSAR 製品のみです。ビルド後の更新には、
アプリケーションやコンパイラー/コンパイラーのライセンスは必要ありません。また、アプリケーション層の適合も不要です。ベーシックソフトウェア
に対する修正は、自動車メーカーが直接、シンプルな方法で実施できます。
24.1.1.2 親しみやすい設定プロセス
ポストビルド時点の設定プロセスは、標準の設定ツールである Da Vinci Configurator Pro で実行します。これは、多種多様なデータベース
(DBC、システム記述、ODX、CDD など)との円滑な同期が可能な、高機能のツールです。
MICROSAR Post-Build Loadable のツールチェーンで、更新した BSW コンフィギュレーションの HEX ファイルをワンステップで生成できます。
そしてそのファイルを、標準のフラッシュツールを使用して ECU に読み込ませることができます。

MICROSAR
88
図 53: MICROSAR Post-Build Loadable のワークフロー
24.1.2 「Post-Build Loadable」に含まれるもの
> このオプションを設定ツールで有効にするためのライセンス
> 読込みが可能なビルド更新を作成するためのツール
> マニュアル類
24.2 MICROSAR Identity Manager – マルチプル ECU 用 Post-Build Selectable ソリューション
24.2.1 機能概要
> より効率的な ECU バリアント管理
> 管理工数の低減
> 在庫管理コストの削減
> リソースを最適化した BSW コンフィギュレーションの実装
> 多数のベーシックソフトウェアモジュールおよび機能のためのオプションとして提供可能
24.2.2 適用分野
Identity Manger は、以下のそれぞれの役目を果たすことができます。
「ドア用 ECU」の例:ほぼ同一のタスクを実行する ECU で、それらの相違が Rx および TxPDU、診断、ネットワークアドレスのいずれかにしか存
在しない場合、それらの ECU は 1 つの型番を持つ 1 つの部品として車両に実装できます。この場合、開発および生産される ECU は 1 つであり、
それが起動時に、自身がどの ECU で、どこに装着されているのか、そして結果として、自身がどの機能を実現すべきなのかを併せて把握します。
レイアウトが同一の場合、PDU のバッファーは完全にオーバーレイされます。アプリケーションは、Identity に関係なく信号やデータエレメントに
アクセスします。したがって、コード上で Identity を区別する必要はありません。
「キャリーオーバーECU」の例:複数のシリーズのモデルにおいて機能が似ている ECU を、1 つの部品として開発し、製造できます。これらの
ECU に含まれるソフトウェアは、それを使用する車両ラインの全部に対応するソフトウェアであり、個々のシリーズモデル間の通信記述が大幅に
異なる場合でも、それらをサポートすることが可能です。この場合、AUTOSAR ECU のソフトウェア設定の基になる ECU Extract は、シグナル
のレイアウトがまったく違っていたり、サポートするバスの数が変わっていたりするなど、バリアントごとに大きく異なります。

MICROSAR
89
図 54: Identity Manager の使用により、1 つの ECU が異なる機能を実行
24.2.3 親しみやすい設定プロセス
複数のバリアントをサポートする ECU プロジェクトの設定プロセスは、バリアントのない従来のプロジェクトとほぼ同じです。ただし、Extract of System Description、あるいは従来の形式である DBC や診断記述(CDD、ODX)などのシステム記述がバリアントごとに別途必要になります。
24.2.4 バリアントの選択
ECU が複数のコンフィギュレーションのバリアントに対応している場合、使用されるバリアントは ECU の初期化時に選択されます。バリアント情報
のソースはユーザーが定義でき、その実装はアプリケーションが行います。このような情報は、コネクターコーディングやフラッシュによるメモリーコ
ーディングで提供される場合もあります。
24.2.5 リソースの節約
1 つの ECU に複数のバリアントを含めることで、実際に開発、生産、そして在庫すべき ECU の数を減らすことができます。ただし、ECU に複数
のバリアントが格納されるため、ECU が必要とするリソースも増大します。
MICROSAR ベーシックソフトウェアのコード生成には、RAM や ROM での最も効率的なメモリー使用に特化した最適化のオプションが複数用意
されています。
24.2.6 「Post-Build Selectable」に含まれるもの
> 設定ツールで有効にするためのライセンス
> Identity Manager 機能を持つベーシックソフトウェアモジュール
> マニュアル類
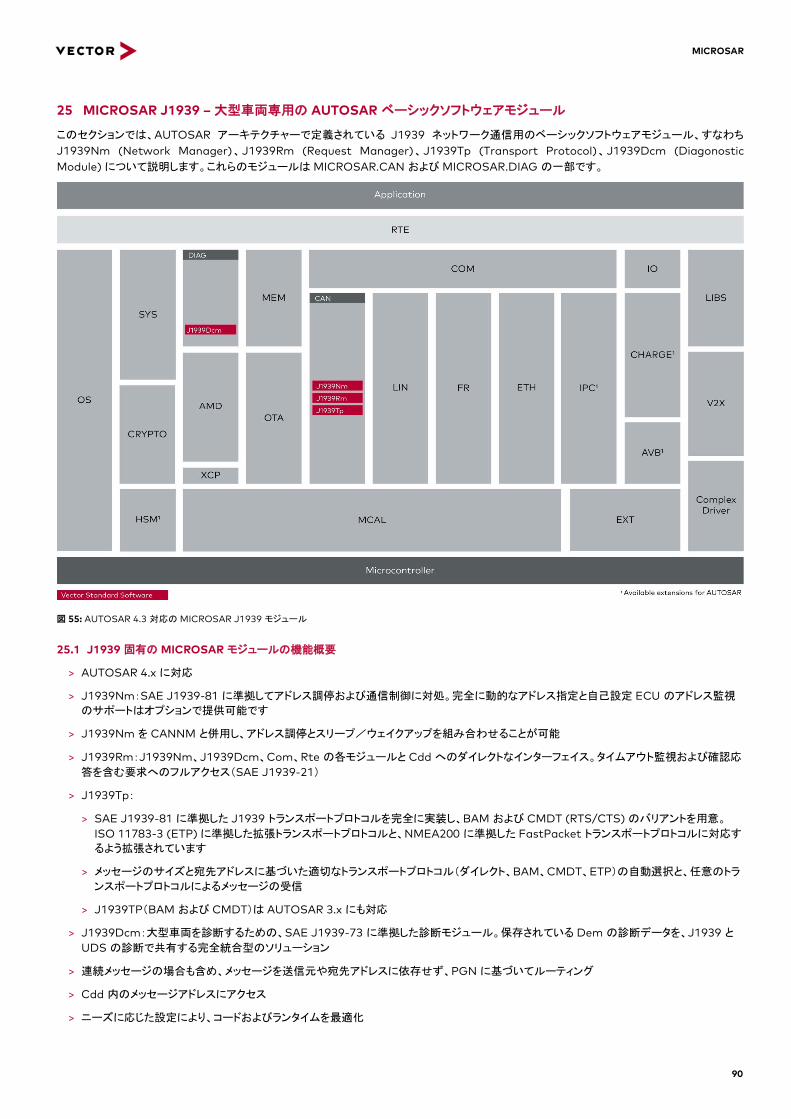
MICROSAR
90
25 MICROSAR J1939 – 大型車両専用の AUTOSAR ベーシックソフトウェアモジュール
このセクションでは、AUTOSAR アーキテクチャーで定義されている J1939 ネットワーク通信用のベーシックソフトウェアモジュール、すなわち
J1939Nm (Network Manager)、J1939Rm (Request Manager)、J1939Tp (Transport Protocol)、J1939Dcm (Diagonostic Module) について説明します。これらのモジュールは MICROSAR.CAN および MICROSAR.DIAG の一部です。
図 55: AUTOSAR 4.3 対応の MICROSAR J1939 モジュール
25.1 J1939 固有の MICROSAR モジュールの機能概要
> AUTOSAR 4.x に対応
> J1939Nm:SAE J1939-81 に準拠してアドレス調停および通信制御に対処。完全に動的なアドレス指定と自己設定 ECU のアドレス監視
のサポートはオプションで提供可能です
> J1939Nm を CANNM と併用し、アドレス調停とスリープ/ウェイクアップを組み合わせることが可能
> J1939Rm:J1939Nm、J1939Dcm、Com、Rte の各モジュールと Cdd へのダイレクトなインターフェイス。タイムアウト監視および確認応
答を含む要求へのフルアクセス(SAE J1939-21)
> J1939Tp:
> SAE J1939-81 に準拠した J1939 トランスポートプロトコルを完全に実装し、BAM および CMDT (RTS/CTS) のバリアントを用意。
ISO 11783-3 (ETP) に準拠した拡張トランスポートプロトコルと、NMEA200 に準拠した FastPacket トランスポートプロトコルに対応す
るよう拡張されています
> メッセージのサイズと宛先アドレスに基づいた適切なトランスポートプロトコル(ダイレクト、BAM、CMDT、ETP)の自動選択と、任意のトラ
ンスポートプロトコルによるメッセージの受信
> J1939TP(BAM および CMDT)は AUTOSAR 3.x にも対応
> J1939Dcm:大型車両を診断するための、SAE J1939-73 に準拠した診断モジュール。保存されている Dem の診断データを、J1939 と
UDS の診断で共有する完全統合型のソリューション
> 連続メッセージの場合も含め、メッセージを送信元や宛先アドレスに依存せず、PGN に基づいてルーティング
> Cdd 内のメッセージアドレスにアクセス
> ニーズに応じた設定により、コードおよびランタイムを最適化

MICROSAR
91
> すべての通信固有のソフトウェアモジュールについて、モジュール間設定が可能
25.2 適用分野
J1939 モジュールの適用分野は、SAE J1939 規格で規定されている専用の機能を用いた、大型車両における CAN ネットワーク経由の通信処
理です。これらは J1939 固有のベーシックソフトウェアモジュールで実装され、近傍のモジュールの拡張によってサポートされます。さらに、
MICROSAR.CAN は、農業用車両および器具に含まれる ISOBUS ECU(ISO 11783 に準拠)の実装にも使用できます。それを可能にするた
め、J1939Nm と CanIf は完全に動的なアドレス調停とアドレストラッキングの機能によって拡張されたほか、J1939Tp には ETP および
FastPacket トランスポートプロトコルが実装されました。NMEA2000 に準拠した船舶でのユースケースも、FastPacket および完全に動的なア
ドレス調停でサポート可能です。
25.3 モジュールおよびアドオン
J1939 用のベーシックソフトウェアモジュールには、AUTOSAR 4.1 で定義されている機能が含まれています。以下に詳細を示します。
> J1939Nm – SAE J1939 Network Management
変更不能なアドレスを持つ J1939 ネットワークのための、SAE J1939-81 に準拠したアドレス調停
AUTOSAR 標準からの拡張
> 完全に動的なアドレス指定、自身のアドレスの競合時の自動変更、現在の変更に対する使用中の全アドレスの自動適応などの機能を追
加する拡張機能
> J1939Rm – SAE J1939 Request Management
SAE J1939-21 に準拠した要求/確認応答プロトコルをサポート
> J1939Tp – SAE J1939 Transport Layer
SAE J1939-21 に準拠したブロードキャスト(BAM)と一対一通信(CMDT、RTS/CTS)をサポートする、J1939 トランスポートレイヤー
AUTOSAR 標準からの拡張
> ETP(ISO 11783-3 および-7 に準拠)と FastPacket(NMEA200 に準拠)のトランスポートプロトコルを追加する拡張機能
> J1939Dcm – SAE J1939 Diagnostic Communication Manager
DCM と並行して動作し、SAE J1939-73 の最も重要な診断メッセージをサポート
25.3.1 クロスパッケージのアドオン
アドオンの中には複数のパッケージに影響を与えるものもあります。以下にその詳細を示します。
> MICROSAR.PBL – Post Build Loadable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
> MICROSAR.IDM – Identity Manager:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください
25.4 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
25.5 その他の J1939 用 MICROSAR 関連製品
> MICROSAR.DIAG の Dem
> MICROSAR.SYS の Det、BswM、EcuM、ComM
> MICROSAR XCP により、ASAM XCP に準拠した測定とキャリブレーションが可能になります。このモジュールは CANoe.XCP、CANoe.AMD、CANape との併用に特化して最適化されています。MICROSAR Xcp には、CAN ECU 用として、関連する CanXcp トラ
ンスポートレイヤーが含まれています
> MICROSAR XCP は AUTOSAR 仕様の枠を超えて、測定オブジェクトの汎用的な読出しをサポートします。そのため、a2l ファイルでのアド
レスの定義や更新は不要です。あらゆるバージョンおよびバリアントからのデータを、MCU ビルドから独立して、a2l ファイルを用いて抽出で
きます。汎用読出し機能の使用には、XCP ツールとして CANoe.AMD または CANape を使用する必要があります
> 安全上の理由から、量産プロジェクトではほとんどの場合、測定やキャリブレーションのインターフェイスを有効のままにしておくことはできま
せん。VX1000If モジュールを使用すると、測定およびキャリブレーションハードウェアである VX1000 のドライバーを、量産時でも無効化し
た状態でベーシックソフトウェアに残しておくことができます。検査や開発の際は、API を通じてこの VX1000 ドライバーを再び有効化できま

MICROSAR
92
す。量産品で使用する場合は、納入時にこのモジュールを MICROSAR.SIP に含めて、このユースケースの承認を受けてください。ただし、
VX1000If 使用時は、量産プロジェクトでもランタイム中に VX1000 ドライバーの有効化はできません

MICROSAR
93
26 MICROSAR vVIRTUALtarget – vVIRTUALtarget による仮想統合
縮傾向にある中で、必要なソフトウェアコンポーネントを最初に一気に作成し、それらの間の相互作用をテストして、最後にターゲットハードウェア
上でベーシックソフトウェアとの連携をテストするだけの時間は、通常は取れません。
今日では、かなりの数のプロジェクトで、プロジェクトのごく早い段階、時には最終的なターゲットハードウェアが完全に定義されていないフェーズの
うちからテストの開始が求められるケースが目立ちます。
図 56: 従来の ECU 開発プロセス
この状況の最適な解決策となるのが vVIRTUALtarget です。vVIRTUALtarget(VTT)は、実物の ECU へのアクセスを必要とせずに ECU ソ
フトウェアを実行できるランタイム環境を提供します。こちらの環境を使用することによって、実際のハードウェアやベーシックソフトウェアの有無を
問わずにテストを実行することが可能になり、結果としてかなりの時間を節約できます。ターゲットハードウェアと vVIRTUALtarget のどちらの環
境においても、同じコンフィギュレーションを使用することができます。
図 57: vVIRTUALtarget を使用した ECU 開発プロセス
ソフトウェアコンポーネントの開発とシステムへの統合が済むと、ECU ソフトウェアとそのパラメーター化は上のレベルに進み、アプリケーションの
開発と並行して、ベーシックソフトウェアの設定にも注力されるようになります。ここで vVIRTUALtarget を使用することにより、ターゲットプラットフ
ォームに依存せずにテストを実施できます。

MICROSAR
94
図 58: vVIRTUALtarget の使用範囲(vVIRTUALtarget pro バージョンは現在開発中)
26.1 vVIRTUALtarget の機能概要
> AUTOSAR 4 のソフトウェアモジュールを早期に統合およびテスト
> 実際のターゲットハードウェアの利用可否に関わらず ECU ソフトウェアの開発が可能
> 仮想ハードウェアと実ハードウェア環境で並行して統合作業が可能なデュアルターゲットオプション
> 仮想環境でのテストを追加して実施することにより、テストの深度を深める
> Microsoft Visual Studio を手軽な開発およびデバッグ環境として使用
> vVIRTUALtarget basic を使用する場合でも、ECU 開発のワークフローに変更は不要
> 割込みとタスクのプリエンプションにより、割込みのシミュレーションを改善
> マルチコアシステムのシミュレーション
26.2 適用分野
MICROSAR vVIRTUALtarget は、下記のようなさまざまな場面で使用できます。
> ECU 統合をスピードアップ
> 仮想環境での統合およびシステムテストにより、利用可能なテストオプションを拡張
> デモの目的やプロトタイピングのための評価プラットフォーム
26.3 機能
vVIRTUALtarget basic は ECU 統合を目的とした製品で、スタック全体(アプリケーション、ソフトウェアコンポーネント、ランタイム環境、ベーシ
ックソフトウェア)を仮想環境でテストすることができます。VTT は以下の機能を備えています。
> 実際の ECU がまだ利用できない状態でも、早い段階からスタック全体をテスト
> ターゲットハードウェアと仮想環境とで、同一の MICROSAR コンフィギュレーションを使用可能

MICROSAR
95
> 仮想環境での ECU ソフトウェアのテストにより、利便性を向上
> サードパーティーの AUTOSAR 準拠のモジュールをサポート
26.3.1 vVIRTUALtarget と CANoe との連携
最新の MICROSAR コンフィギュレーションを基に、vVIRTUALtarget basic で Visual Studio プロジェクトを生成します。これを使用すれば、ベ
ーシックソフトウェアモジュールとアプリケーションから「テスト対象システム(System under Test)」の Windows DLL (SUT DLL) を自動的に
生成できます。現在、Microsoft Visual Studio 2013(Express および Professional)と 2017(Community および Professional)に対応し
ています。
図 59: デュアルターゲットの原理
CANoe をランタイム環境として使用します。生成された DLL は CANoe コンフィギュレーションの ECU ノード内で参照できます。仮想 ECU の
デバッグは Visual Studio プロジェクトを介して行うことができます。CANoe のすべての機能はバスと I/O のインターフェイス経由のスティミュレ
ーションに使用できます。特に、実 ECU との同期運用をサポートしています。
通信および I/O インターフェイスへの入力と測定には、CANoe のライセンスが必要です。
26.3.2 vVIRTUALtarget と MICROSAR.MCAL および MICROSAR.OS との連携
MICROSAR.MCAL と MICROSAR.OS のベーシックソフトウェアモジュールは、いずれも vVIRTUALtarget 向けに移植されています。これら
の MCAL インターフェイスとその挙動は AUTOSAR 4 の仕様に準拠しています。vVIRTUALtarget で使用可能な MICROSAR.OS は、マル
チコア拡張のある、SC2 の「スケーラビリティークラス」を実装しています。
その他のベーシックソフトウェアモジュールには vVIRTUALtarget 環境で使用するために修正の必要はありません。これらのベーシックソフトウ
ェアモジュールは、実際の ECU で使用されるものと同じです。
26.4 ワークフロー
vVIRTUALtarget でベーシックソフトウェアモジュールを設定するワークフローは、実際のハードウェアプラットフォームで行う手順と変わりありま
せん。ただし、これには 1 つだけ例外があり、vVIRTUALtarget および vVIRTUALtarget OS 固有の MCAL モジュールに DaVinci Configurator Pro configuration ツールで自動的に導出できない特殊な設定がある場合は、それを設定する作業が必要になります。
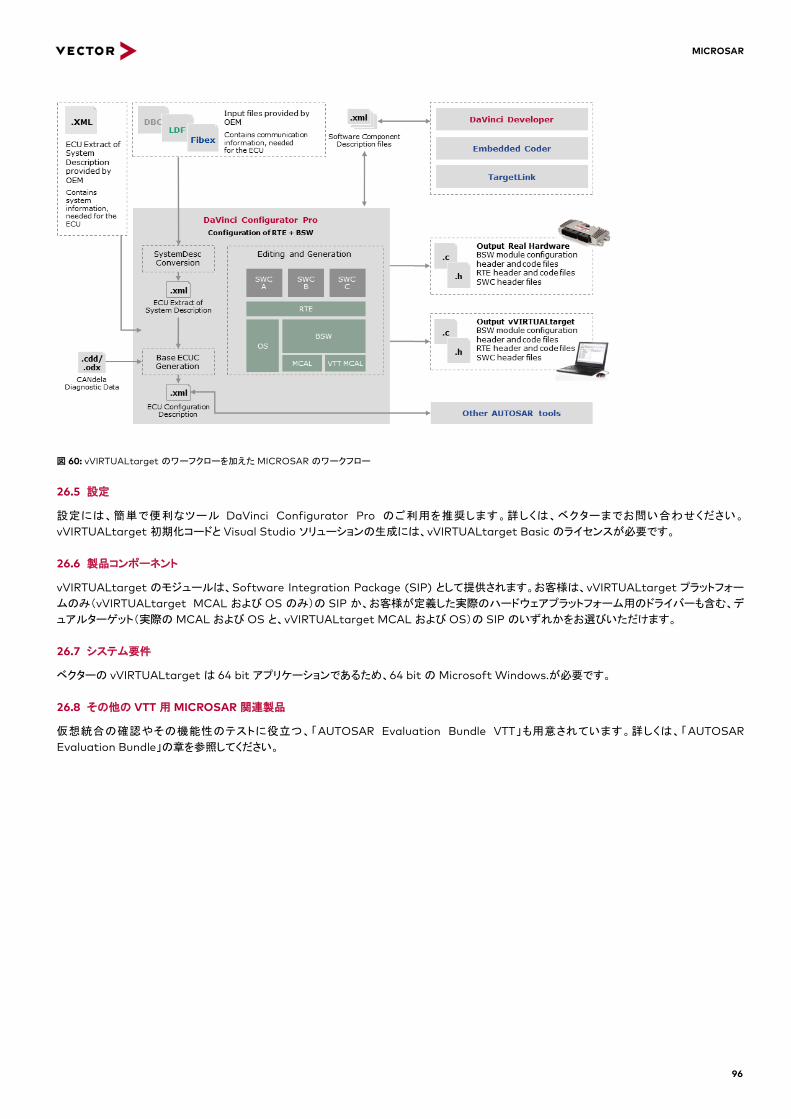
MICROSAR
96
図 60: vVIRTUALtarget のワーフクローを加えた MICROSAR のワークフロー
26.5 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
vVIRTUALtarget 初期化コードと Visual Studio ソリューションの生成には、vVIRTUALtarget Basic のライセンスが必要です。
26.6 製品コンポーネント
vVIRTUALtarget のモジュールは、Software Integration Package (SIP) として提供されます。お客様は、vVIRTUALtarget プラットフォー
ムのみ(vVIRTUALtarget MCAL および OS のみ)の SIP か、お客様が定義した実際のハードウェアプラットフォーム用のドライバーも含む、デ
ュアルターゲット(実際の MCAL および OS と、vVIRTUALtarget MCAL および OS)の SIP のいずれかをお選びいただけます。
26.7 システム要件
ベクターの vVIRTUALtarget は 64 bit アプリケーションであるため、64 bit の Microsoft Windows.が必要です。
26.8 その他の VTT 用 MICROSAR 関連製品
仮想統合の確認やその機能性のテストに役立つ、「AUTOSAR Evaluation Bundle VTT」も用意されています。詳しくは、「AUTOSAR Evaluation Bundle」の章を参照してください。

MICROSAR
97
27 MICROSAR POSIX – AUTOSAR Classic の POSIX オペレーティングシステムへの接続
ドライバーアシスタンスシステムとインフォテインメントの導入に伴い、すでに確立されている静的な ECU ソリューションと新しい動的なサービスと
の連携が一層緊密化しています。ECU プロジェクトでは、これに起因して従来からの AUTOSAR 技術に POSIX ベースのシステムを組み合わせ
て使用するケースが増えており、そのトレンドは新たに規定された標準規格の「AUTOSAR Adaptive Platform」にも明確に表れています。この
点を踏まえ、MICROSAR には、従来の AUTOSAR の車両機能を POSIX オペレーティングシステム下でも使用するためのソリューションと、
POSIX ドメインと AUTOSAR ドメインの間でデータを交換するためのソリューションが用意されています。
図 61: POSIX ベース ECU の一般的なユースケース
27.1 Overview of Advantages
> POSIX ベースのシステムで、MICROSAR ベーシックソフトウェアをプロセスとして実行
> マルチコントローラーのアーキテクチャーをサポート
> MICROSAR ベーシックソフトウェアを、Linux、QNX、Green Hills INTEGRITY、PikeOS など POSIX ベースのサードパーティーのオペレ
ーティングシステムと統合可能
27.2 適用分野
> POSIX 下で AUTOSAR Classic ベーシックソフトウェアモジュールとレガシーコンポーネントをプロセスとして実行
> マルチコントローラーおよびマルチコアアーキテクチャーでの診断
> 異なるオペレーティングシステム間でデータ交換を行うためのプロセス間通信(IPC:Inter Process Communication)
> POSIX オペレーティングシステム用フラッシュブートローダー
> ベクターが包括的なソリューションを提供している、新しい「AUTOSAR Adaptive Platform」標準規格に準拠して設計された ECU。詳しく
は、ベクターまでお問い合わせください
27.2.1 POSIX 下での AUTOSAR Classic ベーシックソフトウェアモジュールおよびレガシーコンポーネントのプロセス
POSIX オペレーティングシステムには通常、量産車で一般的に使われているバスシステム、すなわち Ethernet および CAN 用の専用ドライバ
ーが含まれています。ただし、それらより上位の、車両電気/電子システムとのインターフェイス役となるプロトコルレイヤーは用意されていません。
たとえば DoIP 経由の診断インターフェイスなどはよくあるアプリケーションの 1 つですが、ここで既存の実装を採用できれば有利です。
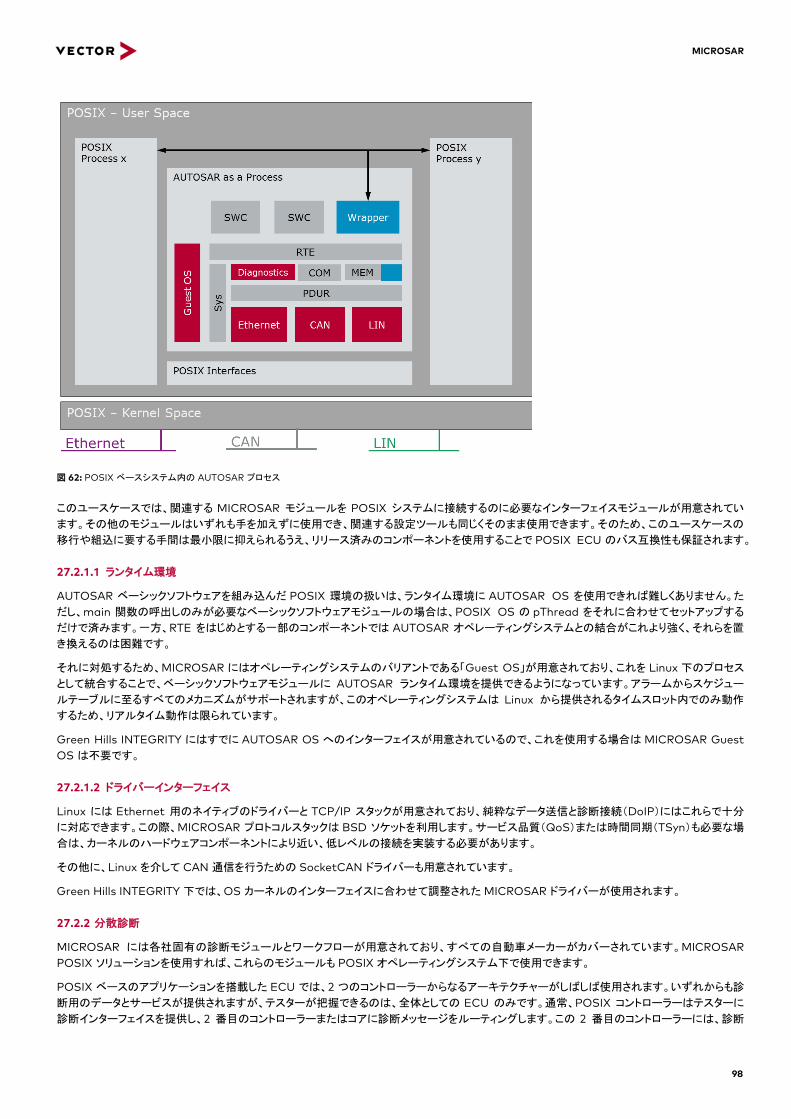
MICROSAR
98
図 62: POSIX ベースシステム内の AUTOSAR プロセス
このユースケースでは、関連する MICROSAR モジュールを POSIX システムに接続するのに必要なインターフェイスモジュールが用意されてい
ます。その他のモジュールはいずれも手を加えずに使用でき、関連する設定ツールも同じくそのまま使用できます。そのため、このユースケースの
移行や組込に要する手間は最小限に抑えられるうえ、リリース済みのコンポーネントを使用することで POSIX ECU のバス互換性も保証されます。
27.2.1.1 ランタイム環境
AUTOSAR ベーシックソフトウェアを組み込んだ POSIX 環境の扱いは、ランタイム環境に AUTOSAR OS を使用できれば難しくありません。た
だし、main 関数の呼出しのみが必要なベーシックソフトウェアモジュールの場合は、POSIX OS の pThread をそれに合わせてセットアップする
だけで済みます。一方、RTE をはじめとする一部のコンポーネントでは AUTOSAR オペレーティングシステムとの結合がこれより強く、それらを置
き換えるのは困難です。
それに対処するため、MICROSAR にはオペレーティングシステムのバリアントである「Guest OS」が用意されており、これを Linux 下のプロセス
として統合することで、ベーシックソフトウェアモジュールに AUTOSAR ランタイム環境を提供できるようになっています。アラームからスケジュー
ルテーブルに至るすべてのメカニズムがサポートされますが、このオペレーティングシステムは Linux から提供されるタイムスロット内でのみ動作
するため、リアルタイム動作は限られています。
Green Hills INTEGRITY にはすでに AUTOSAR OS へのインターフェイスが用意されているので、これを使用する場合は MICROSAR Guest OS は不要です。
27.2.1.2 ドライバーインターフェイス
Linux には Ethernet 用のネイティブのドライバーと TCP/IP スタックが用意されており、純粋なデータ送信と診断接続(DoIP)にはこれらで十分
に対応できます。この際、MICROSAR プロトコルスタックは BSD ソケットを利用します。サービス品質(QoS)または時間同期(TSyn)も必要な場
合は、カーネルのハードウェアコンポーネントにより近い、低レベルの接続を実装する必要があります。
その他に、Linux を介して CAN 通信を行うための SocketCAN ドライバーも用意されています。
Green Hills INTEGRITY 下では、OS カーネルのインターフェイスに合わせて調整された MICROSAR ドライバーが使用されます。
27.2.2 分散診断
MICROSAR には各社固有の診断モジュールとワークフローが用意されており、すべての自動車メーカーがカバーされています。MICROSAR POSIX ソリューションを使用すれば、これらのモジュールも POSIX オペレーティングシステム下で使用できます。
POSIX ベースのアプリケーションを搭載した ECU では、2 つのコントローラーからなるアーキテクチャーがしばしば使用されます。いずれからも診
断用のデータとサービスが提供されますが、テスターが把握できるのは、全体としての ECU のみです。通常、POSIX コントローラーはテスターに
診断インターフェイスを提供し、2 番目のコントローラーまたはコアに診断メッセージをルーティングします。この 2 番目のコントローラーには、診断

MICROSAR
99
マスターをはじめとする従来の AUTOSAR システムが含まれています。どちらのシステムも、Diagnostic Event Synchronizer (vDes) モジュ
ールを追加して拡張されています。vDes はローカルな診断イベントを収集し、それらを DEM マスターにルーティングします。コントローラー間通
信のトラフィックを必要最小限に減らすため、条件を満たした診断イベントのみがルーティングされます。
図 63: POSIX システムでの分散診断
27.2.3 異なるオペレーティングシステム間のデータ交換を目的としたプロセス間通信(IPC)
コントローラーやコアを 2 つ搭載した ECU、あるいはそれより複雑な SoC (System-on-a-Chip) では異なるオペレーティングシステムが実行さ
れますが、それらにはデータを転送するための内部的なシステムのメカニズムがありません。MICROSAR には、CAN や Ethernet などのバス
システムを使用してコストを増やさずに済むよう、このための IPC ソリューションが用意されています。このソリューションは、届いたデータを SPIや UART などのシリアルインターフェイスから、CAN プロトコルスタックを介して転送します。マルチコアアーキテクチャーの場合、転送は共有メモ
リーを介して行われます。
CAN 転送を模したアプローチには、既存の設定ツールと手法が使用できるというメリットがあり、これによって既存の PDU のルーティングが大き
く簡素化します。
この IPC ソリューションには、前提条件として AUTOSAR ランタイム環境と CAN プロトコルスタックが必要です。また、IPC 固有のインターフェイ
スと必要なハードウェアドライバーを追加して、これらのモジュールを補完します。
27.2.4 POSIX オペレーティングシステム用フラッシュブートローダー
AUTOSAR 準拠の ECU に対応するベクターの実績あるフラッシュブートローダーは、適切な拡張機能を用いることで、Linux などの POSIX 互
換オペレーティングシステムでも使用できます。このフラッシュツールとの通信は、自動車メーカー固有のダウンロード仕様に従い、ISO 13400-2 (DoIP) に準拠した Ethernet を介して行われます。
フラッシュブートローダーは Linux ランタイム環境に基づいており、アドレスベースのソフトウェアのダウンロードだけでなく、ファイルベースのソフト
ウェアのダウンロードにも対応します。これによって、開発、量産、車両サービス中に行われる、ソフトウェアの個別のセクションも含めたソフトウェ
アの更新プロセスが大幅に効率化されます。また、追加で提供されているセキュリティーオプションにより、機密性の高い車両データが格納された
ECU を効果的に保護できます。
ベクターでは、すべての主要な自動車メーカーと、自動車業界で使用されている組込 Linux システムに対応したフラッシュブートローダーを提供し
ています。必要に応じて、ベーシックソフトウェアはその他の POSIX 互換オペレーティングシステムにも使用できます。
ベクターのフラッシュブートローダーについて詳しくは、ベクターまでお問い合わせください。
27.3 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。

MICROSAR
100
28 MICROSAR.OTA – ソフトウェアダウンロード用ベーシックソフトウェアモジュール
MICROSAR.OTA バンドルには、車両のソフトウェアの更新を処理、保存、アクティブ化するためのベーシックソフトウェアモジュールが含まれて
います。OTA は「Over the Air」の略です。柔軟な設定が可能なベクターのモジュールにより、ECU ソフトウェアを更新するためのさまざまな戦略
を実現できます。ソフトウェアのダウンロードとその後の更新は、MICROSAR.CRYPTO のモジュールを利用して検証できます(詳しくは
「MICROSAR Security」を参照)。
図 64: MICROSAR.OTA モジュール
28.1 MICROSAR.OTA の機能概要
> AUTOSAR 4.x に対応
> 不揮発性メモリーの更新可能なソフトウェア領域を効率的に管理し、その設定も可能
> 効率のよいデータアクセス
> ECU 内部メモリーの並行利用により、MICROSAR.MEM と MICROSAR.OTA の連携を最適化
> ハードウェアサポートを活用し、新旧のソフトウェアを効率的に切替え(利用可能な場合)
> 内蔵/外付フラッシュのどちらをサポートするかをユーザーが選択可能
> 次回の再起動でソフトウェアを更新する、ベクターのフラッシュブートローダー(CANfbl)ソリューションと統合されたソリューション
28.2 適用分野
MICROSAR.OTA には、フラッシュメモリーのソフトウェア更新を初期化、書込み、アクティブ化するためのサービスが含まれています。提供される
サービスは、内蔵、外付またはその両方のメモリーデバイスで利用可能な物理メモリーアドレスを直接操作するのではなく、ソフトウェアの領域で操
作します。これによってハードウェアに依存することなく、ソフトウェア更新の管理が大幅に簡素化します。
OTA 更新のための自動車メーカー用のソリューションは、更新の制御に使用されるパケットの形式やプロトコルが一般に異なります。
MICROSAR.OTA には、自動車メーカー固有の要求を実装した、自動車メーカー用の拡張機能が用意されています。

MICROSAR
101
28.3 AUTOSAR 標準から拡張したベクターモジュール
MICROSAR.OTA のベーシックソフトウェアモジュールは、AUTOSAR では規定されていません。
> vOtaDl – Vector OTA Download
vOtaDl には、ソフトウェアダウンロードの、ハードウェアに依存しないすべての部分が含まれています。これらは主に、ソフトウェア更新の初
期化、書込み(転送)、アクティブ化を目的として提供されるサービスです。これらのサービスをサポートするために、以下の機能が実装されて
います。
> 複数のユーザーが同時にフラッシュメモリーを使用する際のアクセス制御(MICROSAR.MEM および MICROSAR.OTA)
> バッファーされているデータの処理とメモリードライバーへのルーティング
> データ圧縮およびデータ検証
> 状態管理
> 物理アドレスから仮想アドレスまたはソフトウェアの領域へのメモリー抽象化とその設定
vOtaDl には、自動車メーカー固有のソリューション用に、追加の機能が用意されています。
28.4 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。これには、最適化ツールやフラッシュ使用状況のビジュア
ル表示など、作業を容易にするための機能が装備されています。詳しくは、ベクターまでお問い合わせください。
28.5 その他のメモリースタック用 MICROSAR 製品
MICROSAR OTA は、以下のバンドルに含まれる他のモジュールを必要とします。
> MICROSAR MCAL:vMem
内蔵フラッシュメモリーを使用する場合は、使用するハードウェアに適した OTA フラッシュドライバー(vMem)が必要です。
vMem は、フラッシュなどのメモリーデバイスへのアクセスを提供します。AUTOSAR Fls とは対照的に、vMem ではデバイスとドライバー
の機能に応じて、データフラッシュとプログラムフラッシュへのアクセスが可能です。vMem は、合理化された vMem API をサポートする、
MICROSAR の上位レイヤーモジュールとの使用を目的としています。
> MICROSAR.EXT:vMem Ext
外付フラッシュメモリーを使用する場合は、使用するハードウェアに適した、MICROSAR.EXT の OTA 外付フラッシュドライバー(vMem Ext)が必要です。
> MICROSAR.CRYPTO
チェックサムの計算や暗号化アルゴリズムなどのその他の機能には、MICROSAR.LIBS および MICROSAR.CRYPTO バンドルが必要で
す。
> ベクターフラッシュブートローダーCANfbl
新旧のソフトウェアを切り替えるには、OTA Manager アドオンを組み込んだベクターのフラッシュブートローダーが必要です。
内蔵フラッシュメモリーのみを使用するフラッシュの場合、一般的には、そのフラッシュメモリーはメモリーパーティションを持ち、1 つのパーティショ
ンで書込みを行いながら、それと同時に別のパーティションで読取りを実行できると考えられます(Read-While-Write)。これによって、ECU 上で
実行中のアプリケーションに悪影響を及ぼすことなく、ソフトウェア更新をバックグラウンドでフラッシュメモリーに書き込むことが可能になります。
29 MICROSAR.IPC – プロセッサー間通信用 AUTOSAR ベーシックソフトウェアモジュール
マイクロコントローラーやオペレーティングシステムを複数組み合わせた複雑な ECU プロジェクトでは通常、これらの異なるシステム同士をどのよ
うにして通信させるかが問題になります。
自動車分野で一般的な CAN や Ethernet などのフィールドバスが使用でき、必要な帯域幅が得られる場合は、それらを介して通信を行うことが
できます。
このような条件が揃わない場合でも、それに代わる伝送媒体の使用が可能です。それらは通常はプロジェクト固有で、SPI、UART、その他のシリ
アルインターフェイスなどの多彩な方法で共有メモリー(RAM)への接続が行われます。
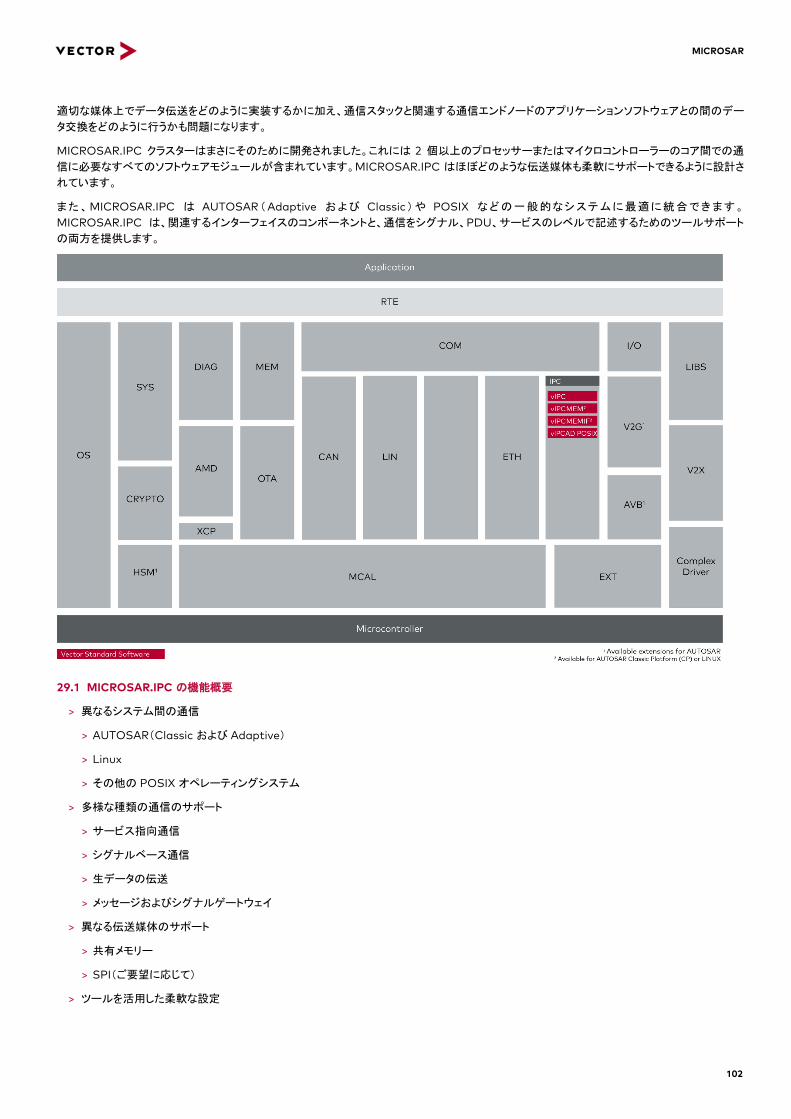
MICROSAR
102
適切な媒体上でデータ伝送をどのように実装するかに加え、通信スタックと関連する通信エンドノードのアプリケーションソフトウェアとの間のデー
タ交換をどのように行うかも問題になります。
MICROSAR.IPC クラスターはまさにそのために開発されました。これには 2 個以上のプロセッサーまたはマイクロコントローラーのコア間での通
信に必要なすべてのソフトウェアモジュールが含まれています。MICROSAR.IPC はほぼどのような伝送媒体も柔軟にサポートできるように設計さ
れています。
また、MICROSAR.IPC は AUTOSAR(Adaptive および Classic)や POSIX などの一般的なシステムに最適に統合できます。
MICROSAR.IPC は、関連するインターフェイスのコンポーネントと、通信をシグナル、PDU、サービスのレベルで記述するためのツールサポート
の両方を提供します。
29.1 MICROSAR.IPC の機能概要
> 異なるシステム間の通信
> AUTOSAR(Classic および Adaptive)
> Linux
> その他の POSIX オペレーティングシステム
> 多様な種類の通信のサポート
> サービス指向通信
> シグナルベース通信
> 生データの伝送
> メッセージおよびシグナルゲートウェイ
> 異なる伝送媒体のサポート
> 共有メモリー
> SPI(ご要望に応じて)
> ツールを活用した柔軟な設定
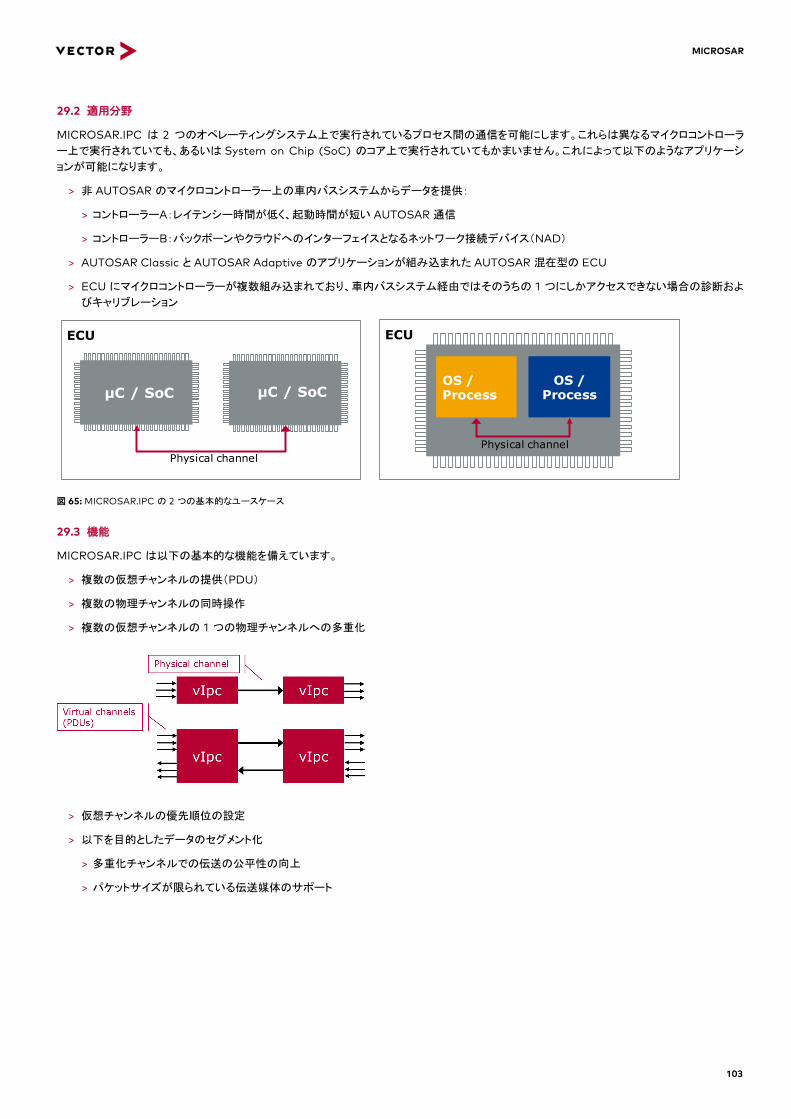
MICROSAR
103
29.2 適用分野
MICROSAR.IPC は 2 つのオペレーティングシステム上で実行されているプロセス間の通信を可能にします。これらは異なるマイクロコントローラ
ー上で実行されていても、あるいは System on Chip (SoC) のコア上で実行されていてもかまいません。これによって以下のようなアプリケーシ
ョンが可能になります。
> 非 AUTOSAR のマイクロコントローラー上の車内バスシステムからデータを提供:
> コントローラーA:レイテンシー時間が低く、起動時間が短い AUTOSAR 通信
> コントローラーB:バックボーンやクラウドへのインターフェイスとなるネットワーク接続デバイス(NAD)
> AUTOSAR Classic と AUTOSAR Adaptive のアプリケーションが組み込まれた AUTOSAR 混在型の ECU
> ECU にマイクロコントローラーが複数組み込まれており、車内バスシステム経由ではそのうちの 1 つにしかアクセスできない場合の診断およ
びキャリブレーション
µC / SoC µC / SoC
Physical channel
ECU ECU
OS / Process
OS / Process
Physical channel
図 65: MICROSAR.IPC の 2 つの基本的なユースケース
29.3 機能
MICROSAR.IPC は以下の基本的な機能を備えています。
> 複数の仮想チャンネルの提供(PDU)
> 複数の物理チャンネルの同時操作
> 複数の仮想チャンネルの 1 つの物理チャンネルへの多重化
> 仮想チャンネルの優先順位の設定
> 以下を目的としたデータのセグメント化
> 多重化チャンネルでの伝送の公平性の向上
> パケットサイズが限られている伝送媒体のサポート

MICROSAR
104
> モジュール式のアーキテクチャー
29.4 モジュールおよびアドオン
AUTOSAR 標準からの拡張
プロセッサー間通信モジュールはいずれも AUTOSAR には含まれておらず、すべてベクターによる拡張です。
> vIpc – Vector Inter Processor Communication
vIpc は IPC ソリューションの鍵となるコンポーネントです。これには以下の機能が装備されています。
> 仮想チャンネルのデータに対する設定可能なセグメント化
> 仮想チャンネルのデータの優先順位の設定
> 複数の仮想チャンネルの 1 つの物理チャンネルに対するマルチプレクサ
> vIpcMemIf – Vector Inter Processor Communication Interface(共有メモリー)
vIpcIf は、vIpc の静的なインターフェイスと、オペレーティングシステムやバスシステムに依存するドライバーインターフェイスの間の変換モ
ジュールです。
> vIpcMem – Vector Inter Processsor Communication(共有メモリー)
vIpcDrv は、使用されているバスシステム用のドライバーで、オペレーティングシステムに依存します。これはベーシックソフトウェアから提供
される標準ドライバーである場合も、特定のユースケースに合わせた、内製のドライバーである場合もあります。MICROSAR.IPC には現在、
AUTOSAR および Linux のオペレーティングシステムに対応した共有メモリードライバーが用意されています。
> vIpcAd POSIX – Vector Inter Processor Communication Adaptor POSIX
vIpc インターフェイスと、AUTOSAR Adaptive および POSIX システムのネットワークソケットの間の変換モジュールです。
ここで説明した機能は、以下の通信シナリオの処理に使用できます。
29.4.1 シグナルベース通信
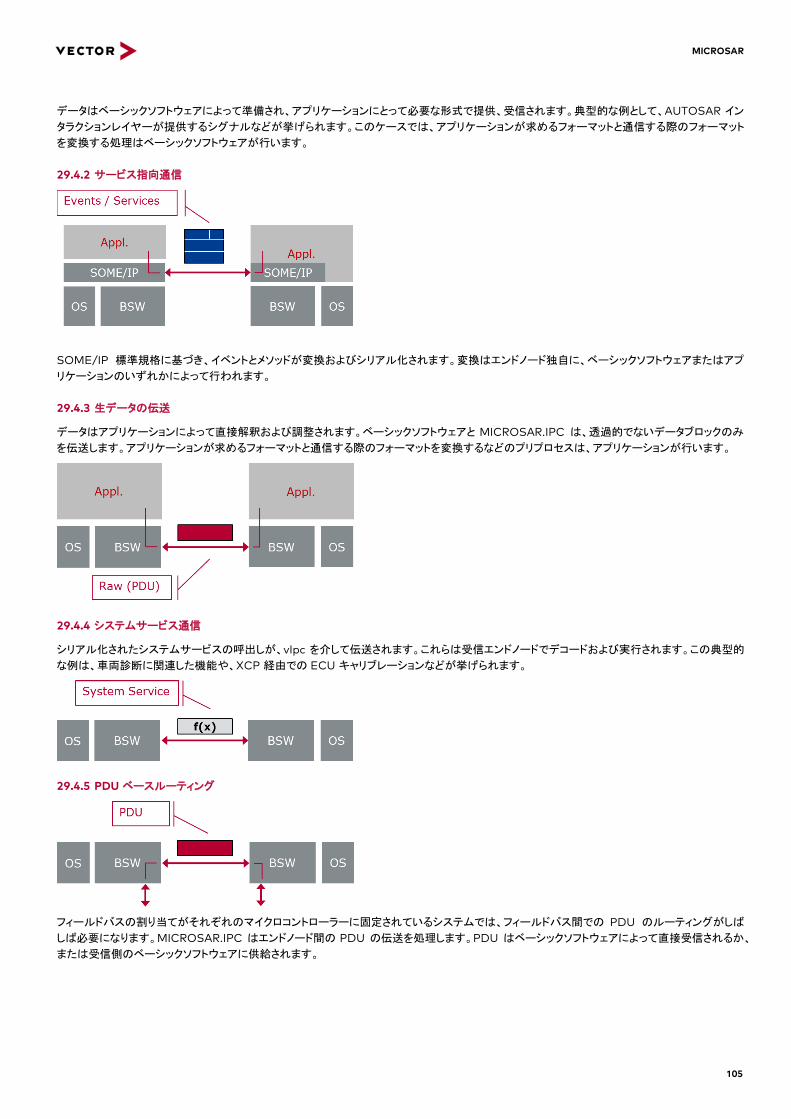
MICROSAR
105
データはベーシックソフトウェアによって準備され、アプリケーションにとって必要な形式で提供、受信されます。典型的な例として、AUTOSAR イン
タラクションレイヤーが提供するシグナルなどが挙げられます。このケースでは、アプリケーションが求めるフォーマットと通信する際のフォーマット
を変換する処理はベーシックソフトウェアが行います。
29.4.2 サービス指向通信
SOME/IP 標準規格に基づき、イベントとメソッドが変換およびシリアル化されます。変換はエンドノード独自に、ベーシックソフトウェアまたはアプ
リケーションのいずれかによって行われます。
29.4.3 生データの伝送
データはアプリケーションによって直接解釈および調整されます。ベーシックソフトウェアと MICROSAR.IPC は、透過的でないデータブロックのみ
を伝送します。アプリケーションが求めるフォーマットと通信する際のフォーマットを変換するなどのプリプロセスは、アプリケーションが行います。
29.4.4 システムサービス通信
シリアル化されたシステムサービスの呼出しが、vIpc を介して伝送されます。これらは受信エンドノードでデコードおよび実行されます。この典型的
な例は、車両診断に関連した機能や、XCP 経由での ECU キャリブレーションなどが挙げられます。
29.4.5 PDU ベースルーティング
フィールドバスの割り当てがそれぞれのマイクロコントローラーに固定されているシステムでは、フィールドバス間での PDU のルーティングがしば
しば必要になります。MICROSAR.IPC はエンドノード間の PDU の伝送を処理します。PDU はベーシックソフトウェアによって直接受信されるか、
または受信側のベーシックソフトウェアに供給されます。
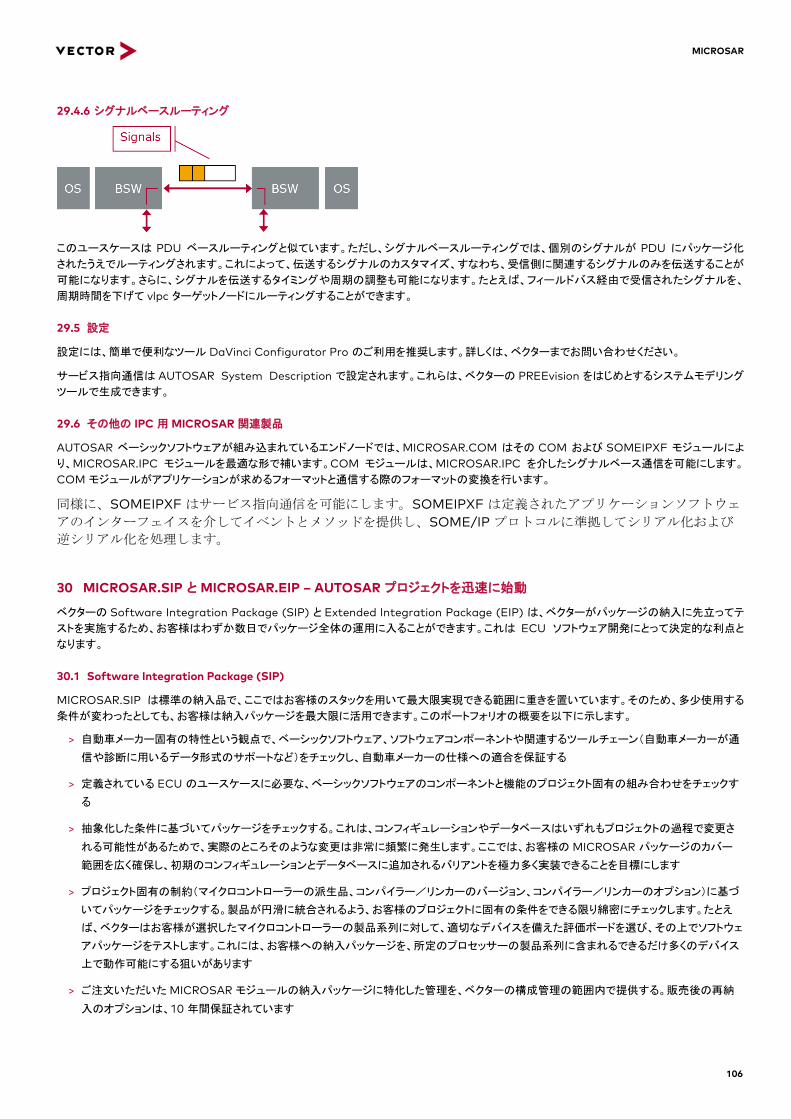
MICROSAR
106
29.4.6 シグナルベースルーティング
このユースケースは PDU ベースルーティングと似ています。ただし、シグナルベースルーティングでは、個別のシグナルが PDU にパッケージ化
されたうえでルーティングされます。これによって、伝送するシグナルのカスタマイズ、すなわち、受信側に関連するシグナルのみを伝送することが
可能になります。さらに、シグナルを伝送するタイミングや周期の調整も可能になります。たとえば、フィールドバス経由で受信されたシグナルを、
周期時間を下げて vlpc ターゲットノードにルーティングすることができます。
29.5 設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。
サービス指向通信は AUTOSAR System Description で設定されます。これらは、ベクターの PREEvision をはじめとするシステムモデリング
ツールで生成できます。
29.6 その他の IPC 用 MICROSAR 関連製品
AUTOSAR ベーシックソフトウェアが組み込まれているエンドノードでは、MICROSAR.COM はその COM および SOMEIPXF モジュールによ
り、MICROSAR.IPC モジュールを最適な形で補います。COM モジュールは、MICROSAR.IPC を介したシグナルベース通信を可能にします。
COM モジュールがアプリケーションが求めるフォーマットと通信する際のフォーマットの変換を行います。
同様に、SOMEIPXF はサービス指向通信を可能にします。SOMEIPXF は定義されたアプリケーションソフトウェ
アのインターフェイスを介してイベントとメソッドを提供し、SOME/IP プロトコルに準拠してシリアル化および
逆シリアル化を処理します。
30 MICROSAR.SIP と MICROSAR.EIP – AUTOSAR プロジェクトを迅速に始動
ベクターの Software Integration Package (SIP) と Extended Integration Package (EIP) は、ベクターがパッケージの納入に先立ってテ
ストを実施するため、お客様はわずか数日でパッケージ全体の運用に入ることができます。これは ECU ソフトウェア開発にとって決定的な利点と
なります。
30.1 Software Integration Package (SIP)
MICROSAR.SIP は標準の納入品で、ここではお客様のスタックを用いて最大限実現できる範囲に重きを置いています。そのため、多少使用する
条件が変わったとしても、お客様は納入パッケージを最大限に活用できます。このポートフォリオの概要を以下に示します。
> 自動車メーカー固有の特性という観点で、ベーシックソフトウェア、ソフトウェアコンポーネントや関連するツールチェーン(自動車メーカーが通
信や診断に用いるデータ形式のサポートなど)をチェックし、自動車メーカーの仕様への適合を保証する
> 定義されている ECU のユースケースに必要な、ベーシックソフトウェアのコンポーネントと機能のプロジェクト固有の組み合わせをチェックす
る
> 抽象化した条件に基づいてパッケージをチェックする。これは、コンフィギュレーションやデータベースはいずれもプロジェクトの過程で変更さ
れる可能性があるためで、実際のところそのような変更は非常に頻繁に発生します。ここでは、お客様の MICROSAR パッケージのカバー
範囲を広く確保し、初期のコンフィギュレーションとデータベースに追加されるバリアントを極力多く実装できることを目標にします
> プロジェクト固有の制約(マイクロコントローラーの派生品、コンパイラー/リンカーのバージョン、コンパイラー/リンカーのオプション)に基づ
いてパッケージをチェックする。製品が円滑に統合されるよう、お客様のプロジェクトに固有の条件をできる限り綿密にチェックします。たとえ
ば、ベクターはお客様が選択したマイクロコントローラーの製品系列に対して、適切なデバイスを備えた評価ボードを選び、その上でソフトウェ
アパッケージをテストします。これには、お客様への納入パッケージを、所定のプロセッサーの製品系列に含まれるできるだけ多くのデバイス
上で動作可能にする狙いがあります
> ご注文いただいた MICROSAR モジュールの納入パッケージに特化した管理を、ベクターの構成管理の範囲内で提供する。販売後の再納
入のオプションは、10 年間保証されています

MICROSAR
107
> ベクターから定期的に issue に関するレポートを通知します
30.1.1 SIP の適用分野
MICROSAR.SIP は、プロトタイプ、ベータ版、更新版、量産用を問わず、すべての MICROSAR 納入パッケージに含まれる固定のコンポーネント
です。動作の範囲は SIP の目的とそれが使用される状況に合わせて調整されます。
ベクターは納入前に、質問票を用いてお客様の要件をできるだけ詳細に書き出します。その後、これに基づいて、SIP を可能な限りきめ細かくカス
タマイズして構築します。
SIP 保守サービスをご利用いただくと、最初の製品納入より能動的に issue 追跡を実施し、以後に発見されたエラー内容とその回避策が通知され
ます。さらに、SIP 保守サービスには年 1 回の更新版 SIP の納入が含まれるほか、拡張保守サービスでは年 2 回の更新版 SIP 納入が行われ
ます。
更新版 SIP の提供にあたり、ベクターはお客様での新しい SIP やデータベースのプロジェクトへの導入とそれらのテストを積極的に支援します。
図 66: MICROSAR Software Integration Package (SIP) とオプションの補足サービス
30.1.2 SIP 拡張オプション
「初期アプリケーション」拡張は、お客様のプロジェクトで技術的に可能である場合に、MICROSAR.SIP に含まれるサービスです。その際納入され
る SIP には、その ECU に固有の、通信用(ECU Extract など)と診断用(ECUC)の入力データに基づいた初期アプリケーションが含まれていま
す。この初期アプリケーションは、ご注文のモジュールに基づく基本的な SIP 機能を備えています。例としては以下のものが挙げられます。
> 通信:初期アプリケーションに含まれる SWC は、1 つのシグナルの送受信をランナブルのレベルで可能にします。ベーシックソフトウェア
は、システムが入力データで初期化され、そこで定義されているすべての通信バスでの通信が可能になるように設定されます
> 診断:初期アプリケーションに含まれる SWC は、RDBI/WDBI のサンプル実装によってランナブルのレベルで拡張されます。さらに、
DTC をトリガーする機能も提供します
> メモリー:初期アプリケーションに含まれる SWC はサンプル実装によって拡張され、データを NV ブロックに格納します
これらの作業の実施には、前提条件として、必要な MICROSAR モジュールが納入パッケージに含まれている必要があります。詳しくは、ベクター
までお問合せください。
このほかに、基本的な SIP 製品の納入と併せて、以下の追加サービスをご利用いただけます。
自動車メーカーに依存しない拡張:MICROSAR スタックがお手元に届く前でも、ベクターの統合チームが主要なタスクをお客様に代わって実施す
るため、お客様はプロジェクトを手軽に開始できます。
> 「お客様のハードウェア」拡張:

MICROSAR
108
> CPU クロック、PLL、内蔵ウォッチドッグも含め、ECU を動作可能な状態に設定
> ネットワークトランシーバーを設定
> お客様の実際のハードウェアを用い、ベクターの拠点で一般的な納入テストを実施
自動車メーカーに依存する拡張:お客様とベクターのチームの間の緊密な対話が必要になります。このチームは、以下をはじめとするさらに幅広い
ECU の依存関係に対応します。
> 自動車メーカーアプリケーション:自動車メーカーが独自に開発した、AUTOSAR ベーシックソフトウェアを補足するモジュールを組み込む
> 自動車メーカーテスト:自動車メーカーのモジュールの組込に特化したテストを実行し、すべてのテストレポートを生成する
お客様が対応する自動車メーカーで利用可能なオプションについては、ベクターの見積書に標準で添付される、自動車メーカー固有のプロダクトイ
ンフォメーションのシートでご確認ください。
30.2 Extended Integration Package (EIP)
最初の納入以後のフォローアップ活動を支援するのが、MICROSAR.SIP を基盤とし、オプションの SIP 拡張(上記参照)とともに提供される
MICROSAR.EIP です。こちらはプロジェクトを迅速かつ包括的に始動させるための極めて重要なサポートで、自動車メーカーでの最初のベンチテ
ストに合格することを目的としています。
通常であればお客様がオンサイトで実施する準備作業は、ベクターの社員が行います。このサービスは、お客様との契約にて定めた固定料金とタ
スクプランニングの枠組みで実施します。提供可能なサービスには以下のものがあります。
> プロジェクトに適したデータベース(通信および診断)を用い、仕様に適合した設定で、お客様の ECU に初期アプリケーションを組み込む
> 定期的なコンサルティング会議によるコーディネートやプロジェクト報告などの、その他のプロジェクト管理作業を実施
> お客様のニーズに合わせたリリース計画を作成
> EIP サービスパッケージの最後に、お客様と一緒に、パッケージの立上げをオンサイトで実施
> ベーシックソフトウェアに関連する、自動車メーカーから要求されているテストケースを実行
これらの準備作業の結果も、以下の納入物に含まれます。
> 設定済みの初期アプリケーションを含む、お客様用のベーシックソフトウェアパッケージ
> リリースノート
> 関連するテストの報告書

MICROSAR
109
図 67: EIP および SIP オプションとの相互作用
30.2.1 EIP の適用分野
MICROSAR.EIP はサンプルの提出を目標とした拡張サービスです。このサンプルは納入直後に自動車メーカーで行われる最初のベンチテスト
に利用されます。そのため EIP は、初めて AUTOSAR 分野のプロジェクトに携わるお客様や、最初の納入に関してプロジェクト上特別な条件が
あるお客様に特にお勧めするオプションです。
> 初めて AUTOSAR 分野のプロジェクトを進めているが、より幅広いサポートを求めたい
> 特定の自動車メーカーに関する経験がないため、ベクターのノウハウを利用したい
> 補足サービス(自動車メーカー固有のコンポーネントやサードパーティー製モジュールなど)を追加する必要がある
> お客様の使用条件(ECU、コンフィギュレーション)に正確に対応したテスト検証が必要である
MICROSAR.EIP は指定の自動車メーカー向けに提供されています。ご希望のお客様には、提供されるサービスの内容、お客様のプロジェクトに
関連する自動車メーカーがサービスの対象であるか、そしてその範囲などをベクターのサービスチームが説明します。
ベクターは EIP サービスでも質問票を使用して、お客様の要件をできる限り詳しく調べます。そして、これらの要件を基盤として、以後に続くその他
すべての活動が行われます。
まず、SIP の場合と同様に、ベクターはお客様のベーシックソフトウェアを統合します。次に、ベクターのサービスチームのメンバーがお客様の製品
条件に正確に基づいてパッケージ全体を設定、テストし、お客様の業務拠点でパッケージの立上げを行います。
サービスパッケージの最後にインストール手順の文書化とテストレポートの生成を行い、ベクターが後続のサポートを実施します。
30.3 設定
納入された MICROSAR パッケージの設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクター
までお問い合わせください。

MICROSAR
110
30.4 その他の SIP および EIP 用 MICROSAR 関連製品
ベクターは、サービスをバックアップするサポートのオプションを幅広く取りそろえ、お客様のプロジェクトの立ち上げ、移行、レビューの成功をご支
援します。詳しくは、ベクターまでお問い合わせください。

MICROSAR
111
31 AUTOSAR Evaluation Bundle – AUTOSAR ベーシックソフトウェアおよびツールの評価用総合パッケージ
AUTOSAR Evaluation Bundle は、自動車メーカー仕様に依存しない AUTOSAR ベーシックソフトウェア(MICROSAR)、設計ツール(
DaVinci Developer)、設定ツール(DaVinci Configurator Pro)を統合した、ベクターの総合パッケージです。お客様は、このパッケージを用い
ることで AUTOSAR のソフトウェアアーキテクチャーに対応した ECU ソフトウェアを開発することが可能です。実際のベーシックソフトウェアの設
計からその設定プロセス、そして実装に至るまで、AUTOSAR の世界を深く知ることができます。診断などの、自動車メーカー固有のベーシックソ
フトウェアモジュールについては、MICROSAR Prototype SIP(本章の最後を参照)を提供しています。
31.1 機能概要
> AUTOSAR 4.x および 3.x に対応した、量産品質のツールおよびベーシックソフトウェアを提供
> お客様の ECU プロジェクトの実行時間やメモリー使用量を現実的に評価
> 多種多様なマイクロコントローラーで使用可能
> 詳しいサンプルプロジェクトを使って AUTOSAR についてすばやく学べる
> AUTOSAR 対応ファイルと従来のディスクリプションファイルの両方をサポート
31.2 適用分野
AUTOSAR Evaluation Bundle は、自動車メーカーが AUTOSAR の開発プロセスと方法を評価する場合や、ECU サプライヤーが
AUTOSAR 対応の初の試作 ECU を作成する場合にも役立ちます。ツールもベーシックソフトウェアも量産レベルに達しているので、次のような観
点からの AUTOSAR 評価に安心してお使いいただけます。
> ベーシックソフトウェアの有効性
> お客様の開発環境へのツールの統合
> お客様のアプリケーション分野における AUTOSAR コンセプトの将来利用
また、AUTOSAR Evaluation Bundle は、アプリケーションに的を絞っているサービスプロバイダー向けの AUTOSAR 対応ソフトウェアコンポー
ネントの、初期開発用の基盤としても最適です。
31.3 機能
AUTOSAR Evaluation Bundle には、ソフトウェアコンポーネント、ランタイム環境、ベーシックソフトウェアで構成される AUTOSAR ECU ソフト
ウェア一式を作成するための、ベクターのすべてのツールとソフトウェアが含まれています。DaVinci ツールは AUTOSAR に対応し、複雑な
AUTOSAR アプリケーションの設計を簡素化します。MICROSAR ソフトウェア設定の入力として「ECU Extract of System Description」(AUTOSAR XML)、またはそれに代えて、従来ネットワークディスクリプションファイル(DBC、FIBEX、LDF)も使用可能です。
> DaVinci Developer ツールは、AUTOSAR 対応 ECU の開発を容易にします。グラフィカルなエディターを使用して、AUTOSAR ソフトウェ
アコンポーネントの記述やそのインターフェイスの定義を迅速かつ明確に行うことができます。このソフトウェアコンポーネントを基にして、RTE設定も DaVinci Developer で実行します
> DaVinci Configurator Pro は、ベーシックソフトウェアモジュールおよび RTE を設定するツールです。簡単で直観的なユーザーインターフ
ェイスを使って、ECU プロジェクトに適した値にパラメーターを設定することができます
> CANdelaStudio は、お客様のネットワークや ECU の診断データを定義する際に使用するツールです。この診断データは標準フォーマット
でエクスポートできるので、MICROSAR 診断ベーシックソフトウェアの自動設定に使用することができます
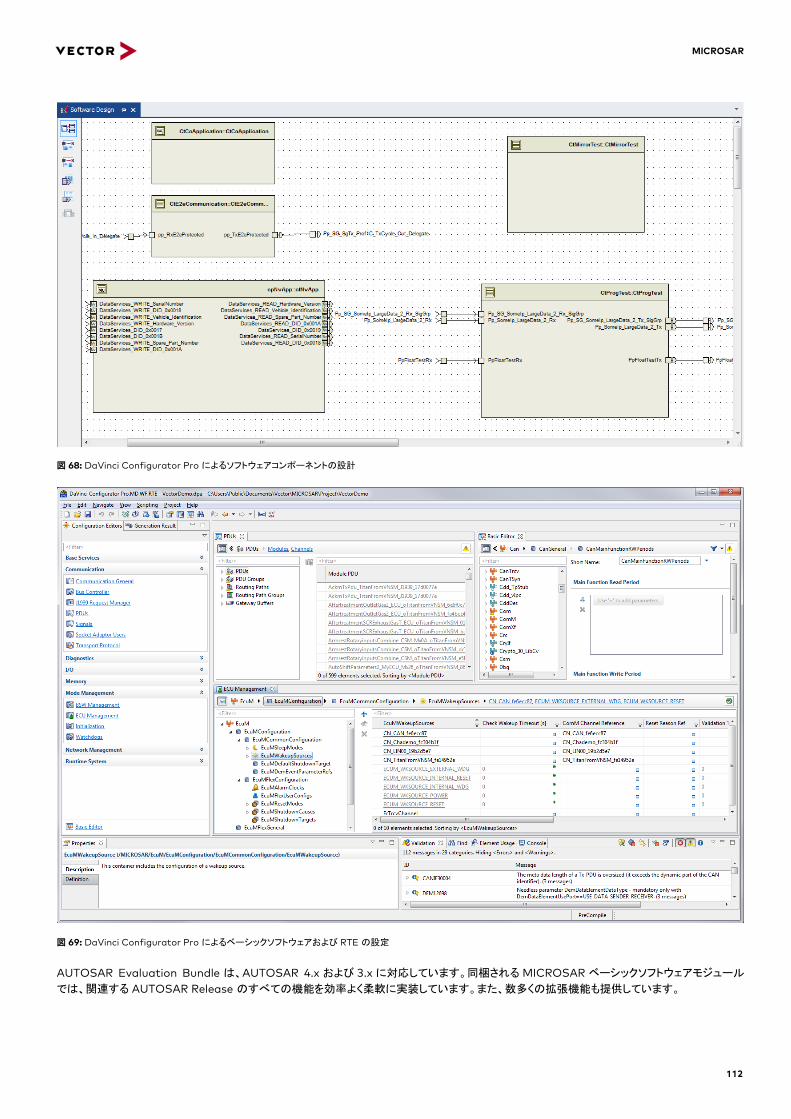
MICROSAR
112
図 68: DaVinci Configurator Pro によるソフトウェアコンポーネントの設計
図 69: DaVinci Configurator Pro によるベーシックソフトウェアおよび RTE の設定
AUTOSAR Evaluation Bundle は、AUTOSAR 4.x および 3.x に対応しています。同梱される MICROSAR ベーシックソフトウェアモジュール
では、関連する AUTOSAR Release のすべての機能を効率よく柔軟に実装しています。また、数多くの拡張機能も提供しています。
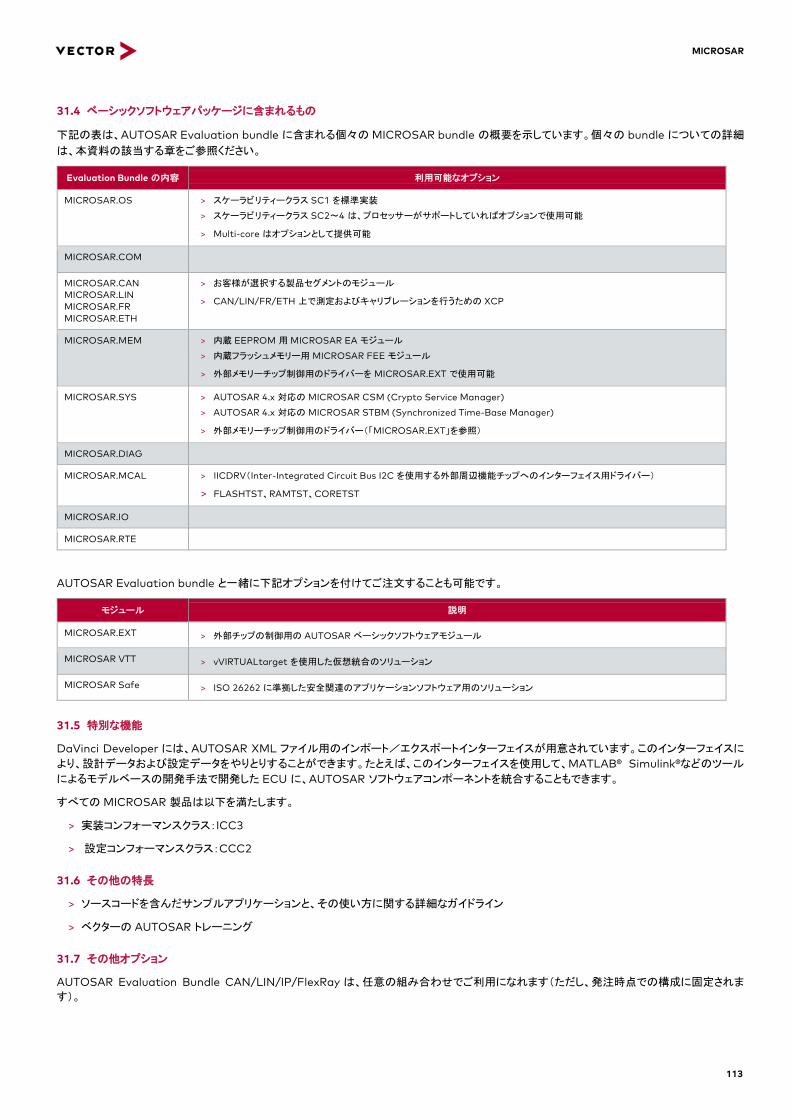
MICROSAR
113
31.4 ベーシックソフトウェアパッケージに含まれるもの
下記の表は、AUTOSAR Evaluation bundle に含まれる個々の MICROSAR bundle の概要を示しています。個々の bundle についての詳細
は、本資料の該当する章をご参照ください。
Evaluation Bundle の内容 利用可能なオプション
MICROSAR.OS > スケーラビリティークラス SC1 を標準実装 > スケーラビリティークラス SC2~4 は、プロセッサーがサポートしていればオプションで使用可能
> Multi-core はオプションとして提供可能
MICROSAR.COM
MICROSAR.CAN MICROSAR.LIN MICROSAR.FR MICROSAR.ETH
> お客様が選択する製品セグメントのモジュール
> CAN/LIN/FR/ETH 上で測定およびキャリブレーションを行うための XCP
MICROSAR.MEM > 内蔵 EEPROM 用 MICROSAR EA モジュール > 内蔵フラッシュメモリー用 MICROSAR FEE モジュール
> 外部メモリーチップ制御用のドライバーを MICROSAR.EXT で使用可能
MICROSAR.SYS > AUTOSAR 4.x 対応の MICROSAR CSM (Crypto Service Manager) > AUTOSAR 4.x 対応の MICROSAR STBM (Synchronized Time-Base Manager)
> 外部メモリーチップ制御用のドライバー(「MICROSAR.EXT」を参照)
MICROSAR.DIAG
MICROSAR.MCAL > IICDRV(Inter-Integrated Circuit Bus I2C を使用する外部周辺機能チップへのインターフェイス用ドライバー)
> FLASHTST、RAMTST、CORETST
MICROSAR.IO
MICROSAR.RTE
AUTOSAR Evaluation bundle と一緒に下記オプションを付けてご注文することも可能です。
モジュール 説明
MICROSAR.EXT > 外部チップの制御用の AUTOSAR ベーシックソフトウェアモジュール
MICROSAR VTT > vVIRTUALtarget を使用した仮想統合のソリューション
MICROSAR Safe > ISO 26262 に準拠した安全関連のアプリケーションソフトウェア用のソリューション
31.5 特別な機能
DaVinci Developer には、AUTOSAR XML ファイル用のインポート/エクスポートインターフェイスが用意されています。このインターフェイスに
より、設計データおよび設定データをやりとりすることができます。たとえば、このインターフェイスを使用して、MATLAB® Simulink®などのツール
によるモデルベースの開発手法で開発した ECU に、AUTOSAR ソフトウェアコンポーネントを統合することもできます。
すべての MICROSAR 製品は以下を満たします。
> 実装コンフォーマンスクラス:ICC3
> 設定コンフォーマンスクラス:CCC2
31.6 その他の特長
> ソースコードを含んだサンプルアプリケーションと、その使い方に関する詳細なガイドライン
> ベクターの AUTOSAR トレーニング
31.7 その他オプション
AUTOSAR Evaluation Bundle CAN/LIN/IP/FlexRay は、任意の組み合わせでご利用になれます(ただし、発注時点での構成に固定されま
す)。

MICROSAR
114
ご要望に応じて、ベクターは MICROSAR トレーニングを拡張し、初期導入時やアプリケーションに MICROSAR ベーシックソフトウェアを統合す
る際のサポートを行います。トレーニングはお客様のサイトでも実施可能です。
31.8 使用可能なハードウェアプラットフォーム
AUTOSAR Evaluation Bundle は、今日最も広く使われている 16bit および 32bit ハードウェアプラットフォームに使用できます。
MICROSAR.MCAL ソフトウェアモジュールおよび MICROSAR.OS はハードウェアに依存します。このことによる制約については、プロセッサー
デバイスの型番に基づいて情報をご提供いたします。ベクターまでお問い合わせください。
評価の際は、ベクターの VC ハードウェアを使用することでリソースを大幅に節約できます。ECU プロジェクトのセットアップも、MICROSAR ベー
シックソフトウェア内の追加モジュールを使用してすばやく簡単に行うことができます。VC121 および VC54B のシリーズのハードウェアは、以下
の内容の MICROSAR ベーシックソフトウェアでサポートされます。
> VCx SW LIB
> MCAL VCx
> vFlash(VC121 および VC54B ハードウェアに統合されているフラッシュブートローダーに適合したテンプレートを使用)
VC ハードウェアについて詳し くは 、ベクターの製品紹介ポータル ( https://www.vector.com/jp/ja/products/products-a-z/hardware/vector-controllers/)の情報をご覧ください。他の種類の VC ハードウェアも開発中です。
注: Evaluation Bundle の統合とテストは評価ボード上で行われます。ベクターは通信および診断用のベクターテストデータベースを使用しま
す。
31.9 MICROSAR Prototype SIP
単なる評価目的を越えて、特定の自動車メーカー向けプロジェクトのプロトタイプフェーズにソフトウェアが必要な場合、ベクターの MICROSAR Prototype SIP (Software Integration Package) のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。

MICROSAR
115
32 その他の情報
ベクターの設定用ツール「DaVinci Configurator Pro」やその他製品に関する情報は、ベクターWeb サイトに掲載しておりますので是非ご覧く
ださい。https://www.vector.com/jp/ja/products/products-a-z/embedded-components/

www.vector.com/jp/ja/











![[20110219] pfffについて](https://img.pdfslide.tips/doc/110x75/5495bf96ac7959092e8b4f32/20110219-pfff.jpg)















