Embed Size (px)
Citation preview
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
Ministère de l'Enseignement Supérieur et de la Recherche Scientifique
UNIVERSITE MENTOURI CONSTANTINE
Faculté des Sciences de l’IngénieurDépartement de Génie Civil
THESE
Présentée pour l’obtention du diplôme de Doctorat d’Etat en Génie CivilOption: Mécanique des structures
"Contribution à l’Etude de la Performance Parasismiquedes Eléments Linéaires en Béton"
Par :
DJEBBAR NABIL
Devant le JuryPrésident : Pr HOUARI H. Université ConstantineRapporteur : Dr CHIKH N. (M.C) Université ConstantineExaminateurs : Pr MIMOUNE M. Université Constantine
Pr GUENFOUD M. Université GuelmaDr ZEGHICHE J. (M.C) Université Annaba
Remerciements
Je tiens à signifier ma profonde reconnaissance à Mr CHIKH Nasr-Eddine, Maître deconférence à l’Université de Constantine, de m’avoir guidé pour l’élaboration de ce travailtout en me témoignant une grande confiance. Je le remercie aussi pour le soutien moral et lesconseils qu’il m’a prodigué, enrichissant ainsi la matière scientifique par sa compétencetechnique.
Mes remerciements vont aussi à mon compagnon de route Mr BOUSALEM Brahim,Maître de conférence à l’Université de Constantine qui n’a cessé de m’encourager tout enrestant disponible me laissant ainsi profiter de son inqualifiable générosité et bien sûr sacompétence scientifique.
J’adresse également mes profonds remerciements au président de jury Mr HouariHacène, Professeur à l’Université de Constantine de l’honneur qu’il m’a fait en acceptant laprésidence du jury de cette thèse.
J’exprime aussi ma profonde gratitude pour Mr MIMOUNE Mostefa, Professeur àl’Université de Constantine, Mr GUENFOUD Mohamed, Professeur à l’Université deGuelma et Mr ZEGHICHE Jahid, Maître de Conférence à l’Université d’Annaba de m’avoirhonoré en acceptant d’examiner ce travail.
Je tiens à remercier vivement tous ceux qui m’ont apporté aide et soutien tout le longde ce parcours, notamment Dr Djerbib Youcef, Maître de conférence à l’Université deSheffield et Dr Abbachi Ammar, Maître de conférence à l’Université d’Abha pour leurinestimable disponibilité et support lors de mes visites de stage.
Sommaire
1.Introduction 1
2- Notions de performance dans la conception en performances 82.1 Conception philosophique de base 82.2 Objectifs de performance 92.3 Niveaux de performance 102.4 Conception à niveaux de performance multiples 112.5 Cohérence dans la conception parasismique 152.6 Définition des différents états limites 172.7 Méthodes d’analyse 18
2.7.1 Elastiques linéaires 192.7.2 Nonlinéaires et inélastiques non linéaires 20
2.8 Méthodes de dimensionnement 232.9 Dimensionnement en déformation contrôlée 272.10 Critères de dimensionnement pour 3 niveaux de performance 29
2.10.1 Rigidité, résistance et ductilité2.10.2 Critère de rigidité 312.10.3 Critère de résistance 322.10.4 Critère de ductilité 34
2.11 Critères de dimensionnement pour 2 niveaux de performance 36
Notions sur les spectres2.12. Spectre de réponse pour SDOF 38
2.12.1. spectre de réponse élastique 382.12.2. spectre inélastique 432.12.3. spectre de capacité 44
2.13. Spectre de réponse pour MDOF 472.14 Spectre de déplacement relatif (SDDS)2.15 Spectre de déplacement d’écoulement ou du point d’écoulement (YDS) 492.16 Conclusion 51
3- Comportement global 55Introduction
3.1 Notions de ductilité 563.1.1 Demande de ductilité de déplacement 573.1.2 Structures faisant l’objet d’une ductilité limitée 62
3.2 Facteur de comportement R 623.2.1 Facteur de ductilité R 65
3.2.2 Facteur de réserve de résistance sR 683.2.3 Facteur de redondance RR 703.2.4 Facteur de correction MDOF - SDOF 703.2.5 Facteur tenant compte de l’effet dynamique P-Δ 713.2.6 Evaluation systématique3.2.7 Introduction du facteur R dans la conception en performances 72
3.3 Conclusion 73
4- Evaluation de la période limite 76Introduction
4.1 Méthodes utilisées 784.1.1 Méthodes de linéarisation équivalente 794.1.2 Méthodes basées sur le facteur de modification de déplacement 85
4.2 Profile de déplacements 864.3 Déplacement en tête 864.4 Considération pratique 874.5 Procédures d’évaluation de la période maxT 87
4.5.1 Procédures 1 874.5.2 Procédures 2 91
4.6 Illustration pratique 924.7 Conclusions 97
Annexe du chapitre 4 99
5- Comportement local 1195.1 Introduction5.2 Confinement du béton–armature de confinement 1195.3 Modélisation 120
5.3.1 Aperçu historique 1205.3.2 Modèles représentatifs 123
5.4 Ductilité locale et notion de longueur de confinement 1315.5 Capacité flexionnelle ; analyse moment–courbure 1345.6 Paramètres influant la performance des sections en béton confiné 1425.7 Conclusions 144
6- Eléments linéaires 1476.1 Introduction6.2 Poteaux 147
6.2.1 Armatures transversales : confrontation réglementaire 1486.2.2 Illustration pratique 150
6.2.3 Incidence de l’armature de confinement sur le niveau d’endommagement des poteaux 1536.2.31 Niveaux de performance 1546.2.3.2Courbes d’endommagement 156
6.2.4 Cas d’études 158 6.2.5 Influence de l’élancement 160
6.2.6 Conclusion 162
6.3 Poutres 1646.3.1 Ductilité locale 1646.3.2 Estimation de la ductilité de courbure 1656.3.3 Etude paramétrique 1686.3.4 Proposition d’une formulation unifiée simple 170
6.3.5 Evaluation du taux d’acier tendu max max 1726.5.1 Section de béton non confiné 1746.5.2 Section de béton faiblement confiné 174
6.3.6 Conclusions 177
7- Nœuds poteau - poutre7.1 Principes de base 1797.2 Comportement des nœuds sous cisaillement alterné 182
7.2.1 Effort tranchants dans le noyau 1827.3 Résistance du nœud à l’effort tranchant 184
7.3.1 Mécanisme bielles-treillis 1847.3.2 Mécanisme de Kim et Mander 1877.3.3 Mécanisme de Bakir - Boduruglu 1917.3.4 Mécanisme de Shiohara 1947.3.5 Influence du cisaillement alterné sur le mécanisme de transfert 199
7.4 Facteurs influençant la résistance du nœud 2017.4.1 Influence des poutres transversales et hourdis de planchers 2017.4.2 Ancrage des barres longitudinales des poutres 201
Force d’adhérenceLimitation du diamètre des barres
7.5 Considérations réglementaires 2037.5.1 Effort tranchant 203
7.6 Relation entre l’évolutionde l’endommagement; contrainte de cisaillement etangle de distorsion 206
7.7 Proposition d’une relation contrôlant la distorsion à travers le taux d’armature transversale du noyau 2107.8 Conclusions 221
8- Conclusions et recommandations8.1 Conclusions 2258.2 Recommandations 233
Liste des figures
Chapitre 2
Figure 2.1
Figure 2.2
Figure 2.3
Figure 2.4
Figure 2.5
Figure 2.6
Figure 2.7
Figure 2.8
Figure 2.9
Figure 2.10
Figure 2.11
Figure 2.12
Figure 2.13
Figure 2.14
Figure 2.15
Figure 2.16
Niveaux de performance
Réponse structurelle pour différents niveaux de chargement
Méthodes d’analyse élastique linéaire
Méthodes d’analyse inélastique
Critères de dimensionnement pour trois niveaux de performance
Caractéristiques pour trois niveaux de performance
Valeurs du déplacement relatif d’étage pour différents états limites
Spectre élastique correspondant à un PGA de 0.5g pour 5%
d’amortissement
Spectre lissé
Spectre normalisé pour séisme interplate et intraplate
Spectres inélastiques
Spectre de capacité
Caractéristiques séisme proche vs séisme lointain
Modèles pour systèmes MDOF
a/ Cantiliver b/ Shear beam
Comportement structurel ; séisme ,proche et séisme lointain
Effet de l’augmentation de la rigidité latérale pour un déplacement
d’écoulementconstant; avec réduction de la période, demande de
ductilité et déplacement max de la réponse.
Chapitre 3
Figure 3.1
Figure 3.2
Figure 3.3
Mécanismes de déformation post-élastique
Effort tranchant de base - déplacement global
Facteur de comportement R (=5, site rocheux)
Chapitre 4
Figure 4.1
Figure 4.2
Figure 4.3
Dimensionnement à deux niveaux de performance
Comportement d’un système élasto - plastique
Amplification de la période, méthodes de linéarisation
Figure 4.4
Figure 4.5
Figure 4.6
Figure 4.7
Figure 4.8
Comparaison du rapport d’amortissement visqueux pour les 4 méthodes
Rapports d’amortissement visqueux normalisés pour les 4 méthodes
Variation du coefficient d’amplification de la période tenant compte de la
nature du site
Variation du coefficient d’amplification de la période en faisant abstraction au
site
Organigramme , procédures 1 et 2
Chapitre 5
Figure 5.1
Figure 5.2
Figure 5.3
Figure 5.4
Figure 5.5
Figure 5.6
Figure 5.7
Figure 5.8
Figure 5.9
Figure 5.10
Figure 5.11
Figure 5.12
Figure 5.13
Organigramme 5.1
Courbe contrainte déformation pour béton confiné (Kent et Park 1971)
Courbe contrainte déformation pour béton confiné (Sheikh et Uzumeri 1982)
Courbe contrainte déformation pour béton confiné (Kent et Park modifié 1982)
Courbe contrainte déformation pour béton confiné (Mander et al 1988)
Courbe contrainte déformation pour béton confiné (Murat et al 1992)
Courbe contrainte déformation pour béton confiné (Bousalem et al 2004)
Courbe contrainte déformation pour béton confiné (Cusson et al 1992)
Diffusion de la plastification sur une longueur lp
Déformations dans un élément fléchi de longueur dx
Modèle pour béton non confiné
Modèle contrainte déformation de l’acier longitudinal
Analyse moment courbure d’une section comprimée fléchie en béton armé
Performances flexionnelles des section en béton confiné
Détermination de M-
Chapitre 6
Figure 6.1
Figure 6.3
Figure 6.4
Figure 6.5
Figure 6.6
Figure 6.7
Figure 6.8
Capacités de résistance et de déformation des structures R+3 et R+4
Courbes d’endommagement pour un niveau de ductilité faible
Variation du niveau d’endommagement en fonction de l’élancement et du niveau de
ductilité
Flexion d’une section doublement armée
Section soumise en flexion avec effort normal
Influence de et sh sur le facteur de ductilité de courbure
Ductilité sectionnelle fonction des différents taux de ferraillage (éq.6.13)
Figure 6.9
Figure 6.10
Figure 6.11
Corrélation et proposée et analytique
Section en béton non confiné renfermant un taux max d’armature tendue max
Section faiblement confinée renfermant untaux max d’armature tendue max
Chapitre 7
Figure 7.1
Figure 7.2
Figure 7.3
Figure 7.4
Figure 7.5
Figure 7.6
Figure 7.7
Figure 7.8
Figure 7.9
Figure 7.10
Figure 7.11
Figure 7.12
Figure 7.13
Figure 7.14
Figure 7.15
Figure 7.16
Figure 7.17
Figure 7.18
Différents mécanismes de ruine possibles
Noyau du nœud sous actions sismiques
Mécanismes de transfert
a- diagonale en béton b- treillis c- béton en compression acier en traction
Modèles de fissuration d’un nœud poteau - poutre
Modèles pour noyaux fissurés
Déformation inélastique du noyau (panneau)
Comparaison des mécanismes proposés et existants
Mécanismes de ruine considérés
Forces internes agissant sur les sections critiques, mode–B
Définitions des forces internes et leurs notations
Relation distorsion endommagement, performance parasismique résiduelle, service,
réparation et sécurité contre la ruine
Influence du nombre de lits sur l’angle de distorsion (EC-8)
Influence de l’effort normal sur l’angle de distorsion (EC-8)
Variation de sh fonction de l’élancement du noyau
Angle de distorsion si la relation de Bakir et al est adoptée (n=2 et n=3)
Variation de sh fonction de l’élancement du noyau (Heggar et al)
Angle de distorsion si la relation de Heggar et al est adoptée (n=2 et n=3)
Angle de distorsion donné par les relations de Heggar et al ; et Bakir et al
Liste des Tableaux
Chapitre 2
Tableau 2.1
Tableau 2.2
Tableau 2.3
Tableau 2.4
Niveaux de performance, états d’endommagement correspondants et
déplacements limites
Niveaux de performance selon : 1.ATC, 2.SEAOC et 3.Yawamaki
Approches de dimensionnement parasismiques
Niveaux d’aléas sismiques proposés
Chapitre 3
Tableau 3.1
Tableau 3.2
Tableau 3.3
Facteur de ductilité de courbure des sections poteaux et poutres
Plages de périodes selon les sites
Facteur de redondance
Chapitre 4
Tableau 4.1
Tableau 4.2
Tableau 4.3
Tableau 4.4
Tableau 4.5
Tableau 4.6
Tableau 4.7
Tableau 4.8
Coefficient d’amplification de la période pour un site rocheux (S1); procédure 1
Coefficient d’amplification de lapériode pour un site ferme (S2) ; procédure 1
Coefficient d’amplification de la période pour un très meuble (S4) ; procédure 1
Coefficient d’amplification de la période pour un site rocheux (S1); procédure 2
Coefficient d’amplification de la période pourun site ferme (S2) ; procédure 2
Coefficient d’amplification de la période pour un très meuble (S4); procédure 2
Variation du coefficient d’amplification de la période tenant compte du site
Variation du coefficient d’amplification de la période en faisant abstraction au site
Chapitre 5
Tableau 5.1
Tableau 5.2
Relations entre les gains en résistance et en déformation et les facteurs
Longueurs de confinement selon différents règlements
Chapitre 6
Tableau 6.1
Tableau 6.2
Tableau 6.3
Capacités de résistance et de déformation des structures R+4
Capacités de résistance et de déformation des structures R+3
Niveaux de performance, états d’endommagement correspondants et déplacements
limites
Tableau 6.4
Tableau 6.5
Tableau 6.6
Tableau 6.7
Tableau 6.8
Tableau 6.9
Tableau 6.10
Evaluation de l’endommagement des poteaux en considérant le code RPA99
Evaluation de l’endommagement des poteaux en considérant les codes NZS et l’EC-8
Endommagement moyen des poteaux usuels
Expressions proposées ; endommagement résultant fonction de la flexibilité des
poteaux
Evaluation de l’endommagement des poteaux en considérant les codes NZS et l’EC-8
Valeurs de max préconisé par l’EC-8 pour les classes de ductilité M et H
Valeurs de max préconisé par le code RPA99
Chapitre 7
Tableau 7.1
Tableau 7.2
Niveau de performance ; versus distorsion et endommagement structurel
Critères de dimensionnement nécessaires au contrôle de l’endommagement du noeud

Résumé
L’essence d’une conception rationnelle est fidèlement traduite entre demande et capacité.
Afin de limiter les pertes économiques il devient nécessaire d'adopter une approche de
dimensionnement à plusieurs niveaux de performance. Il a été trouvé par ailleurs que la
conception à trois niveaux de performance où la méthodologie de dimensionnement intéresse
respectivement le service, l'endommagement et l'ultime ou survie est la plus pratique.
Pour aboutir à une conception rationnelle on doit adopter à la limite une conception à deux
niveaux de performance à savoir le service et l'ultime.
La cohérence dans la stratégie du dimensionnement parasismique exige la vérification de la
rigidité de la structure pour le niveau de service, la résistance pour le niveau
d'endommagement et la ductilité pour le niveau ultime. L’examen du code Parasismique
Algérien révèle qu'il n'adopte principalement qu'une procédure de dimensionnement à un seul
niveau concernant l'état limite ultime (ELU) satisfaisant la "sécurité de la vie" (à l'instar des
codes basés sur la conception en force) et que la ductilité locale des éléments linéaires
(poteaux et poutres), n’a pas bénéficié de recommandations appropriées pouvant leur garantir
fidèlement le comportement escompté, du moment que la boucle de contrôle sur la
déformation au niveau des zones dissipatives d'énergie est carrément inexistante. Faute
d'outils le concepteur est dans l'impossibilité d'apprécier le niveau de ductilité local ou de
pouvoir le contrôler afin d'établir la corrélation nécessaire entre comportement global, local
de la structure, garantissant un comportement structurel homogène.
La présente thèse a principalement pour but de passer en revue la procédure de
dimensionnement établie au sein du code RPA99 et apporter l’information et outils
nécessaires pour une éventuelle réhabilitation réglementaire. Cette dernière pourra se
concrétiser d’une part à travers une refonte globale en la structurant autour d’une conception à
3 niveaux de performance où l’endommagement structurel et non structurel sera la pierre
angulaire; ou bien la hisser à une conception à 2 niveaux pour répondre au minimum requis
où la boucle de contrôle sur la déformation doit être implicitement considérée à travers des
recommandations spécifiques aux zones critiques dissipatives d’énergie, tout en permettant un
contrôle global à travers le déplacement relatif de niveau en considérant la limite sur la
période structurelle d’un système élastiquement équivalent.
L’évaluation de la période est conduite dans l’esprit de l’introduire dans un coffrage d’un
dimensionnement en capacité, garantissant une rigidité latérale minimale (période maximale,
Tmax) d’où une capacité de résistance minimale requise pour contrôler l’endommagement
structurel à travers le contrôle d’un niveau de déformation tolérable ou un niveau de ductilité
donné. Cette alternative pourra donc faire l’objet de boucle de contrôle globale du niveau
d’endommagement tolérable si ce dernier est traduit en déplacement relatif de niveau.
Le travail entrepris sur le contrôle local a permis de proposer des expressions permettant
d’introduire un taux d’armature ajustable pour les différents poteaux en prenant en
considération une descente de charge différente ainsi qu’un déplacement de niveau constant
conduisant à une meilleure cohérence du comportement global; garantissant par l’occasion
une capacité de déformation d’ensemble par rapport à un niveau d’endommagement désiré si
ce dernier sera pris comme critère en dans le processus de dimensionnement. On pourra alors
parler de capacité de déformation de niveau à l’instar d’un déplacement de niveau. Dans le
même contexte, une formule unifiée simple d’utilisation a été proposée, corrélant le taux
d’armature tendue et la ductilité de courbure des poutres en béton armé; en prenant en
considération l’incidence des différents paramètres affectant cette dernière notamment /' ,
le taux d’armature transversale sh et les caractéristiques mécaniques des matériaux. Afin de
se prémunir contre l'éventualité d'une ruine prématurée ou une migration accidentelle des
déformations plastiques, des considérations réglementaires relatives aux noyaux de nœuds ont
été rassemblées pouvant servir à une future inspiration, et une formulation reliant l’armature
transversale du noyau à l’angle de distorsion limite a été proposée, s’accommodant avec la
variation de l’élancement du noyau, les caractéristiques des matériaux ainsi que du nombre de
lits à disposer latéralement. Cette formulation pourra servir d’outil de contrôle du niveau
d’endommagement résultant.

Contribution to the Study of Seismic Performance of
Reinforced Concrete Linear Elements
Abstract
The essence of a rational earthquake-resistant structures design is based on the correlation of
demand with capacity. In order to reduce economical losses, it becomes necessary to adopt a
multi level performance design approach. It has been found however that a three performance
level design in which the design methodology addresses respectively the serviceability, the
damage and the ultimate or life safety which is the most practical. A rational design requires a
two performance levels at least namely serviceability and the ultimate. A coherent seismic
design strategy demands the verification of the structural rigidity for the serviceabilty level,
the resistance for the damage level and the ductility for the ultimate level. The examination of
the Algerian seismic code reveals that it adopts principally a one level design procedure
concerning the ultimate limit state satisfying "life safety" (like force based codes) in which
the local ductility of linear elements (beams and columns) has not beneficiate of appropriated
recommendations guarantying faithfully the desired behaviour, because the deformation
control routine at the level of the dissipating zones of energy doe not exist. Because of the
lack of means, the designer is not able to appreciate or to control the local ductility level in
order to establish the necessary correlation between global and local structural behaviour
guarantying a homogenous structural behaviour. The present thesis revues principally the
design procedure adopted by the RPA99 code and brings the information and necessary
means for eventual regulation rehabilitation. This could be concretised through a global
recasting by structuring the design procedure around a three level performance design in
which the structural and non structural damage will be the angular stone; or to lift it up to be
based on two performance levels fulfilling the minimum required, where the deformation
control routine should be implicitly considered by the way of specific recommendations for
the critical zones dissipating of energy enabling a global control interstorey drift by
considering the limit structural period of an equivalent elastic system.
The evaluation of the period is conducted in order to be incorporated within a capacity design
procedure guarantying a minimum lateral rigidity (period max, Tmax) hence a minimum
resistance capacity de résistance required for the structural damage control by the control of a
permissible deformation level or a desired ductility level. This alternative may serve as a
global control loop for a tolerable damage level if this last is expressed in term of interstorey

drift. The investigation related to the local control has made possible to propose expressions
allowing the introduction of an adjustable steel ratio for different columns while considering a
different axial load and constant level drift leading by the way to a better coherence of the
global behaviour; guarantying by the way a global deformation capacity versus a desired
damage level if this later is considered as a design criteria. We can consider a deformation
capacity level similarly as a drift level. Within the same context a simplified design equation
correlating tension steel to a ductility curvature of reinforced concrete beams, taking into
account the influence of different parameters namely the ratio of compression to tension
steel /' , the transverse steel ratio sh and the mechanical characteristics of materials.
In order to avoid an early collapse or an accidental migration of plastic deformations,
regulation recommendations relative to beam-column joints were gathered for a future
inspiration. A formulation linking the required transverse steel to the limit distortion angle has
been proposed, adapted to a variation of the slenderness of the core joint, the material
characteristics and the number of steel layers. This formulation may serve as a helpful mean
in order to control the resulting damage level.
ة الطلب والقدريرتكز التصميم العقالني للهياكل المضادة للزالزل على تحقيق العالقة بين
حيث أن ,لتقليص الخسائر االقتصادية يصبح من الضروري تبني مدخل لتصميم يرتكز على ثالثة مستويات لألداء
الحالة الحدية القصوى أو حماية النفس البشرية التي تعد والضرر,منهجية التصميم تخص على التوالي الخدمة
.األكثر تداول
.الخدمة واألقصى:أن نتبنى تصميم أدنى يرتكز على مستويينلكي نصل إلى تصميم عقالني يجب
لمقاومة ا,حالة الخدمةليقتضي الترابط في استراتيجية التصميم لمقاومة الزالزل التحقق من جساءة الهيكل
.لمستوي األقصى لماطلية الوضررتل و امستوىل
ي الحسابات ضد الزالزل يكتشف أن هذه المتفحص للقواعد الجزائرية الخاصة باتوصيات والتدابيرالمتخدة ف
خاص بالحالة الحدية القصوى المرضية,القواعد ترتكز أصال على طريقة تصميم تعتمد على مستوي واحد
.على غرار النظم المرتكزة على مبدأ القوة, لحماية الحياة البشريةلمستوى
,ئمة تستطيع ضمان السلوك المرتجي بوفاءبما أن الماطلية المحلية للعناصر الخطية لم تستفد من توصيات مال
نتيجة غياب ,حيث أن حلقة مراقبة التشوه على مستوى المناطق الحرجة الماضية للطاقة غير متواجدة أصال
عاجز عن تقدير أو مراقبة المستوي المحلي للماطلية إلنشاء الصلة الالزمة بين السلوك المصمماألدوات أصبح
.ضامن للسلوك الهيكلي المتجانسالكلي المحلي للهيكل ال
وتقديم المتداولةقواعد الالهدف الرئيسي لهذه األطروحة يتمثل في تفحص طريقة التصميم المعتمد من طرف
.المعلومات واألدوات الالزمة إلعادة تأهيل قانوني محتمل
من جهة أين الضرر من جهة تيصبح األمر ملموسا عن طريق إعادة صهر كلية ببناء تصميم ثالثي المستويا
. على األقلالهيكلي والغير الهيكلي يكون حجرة ركن أو ارتقاء بالتصميم إلى مستويين
عن طريق توصيات خاصةلتحقيق المطلوب األدنى حيث تكون حلقة مراقبة التشوه نأخذ بعين االعتبار ضمنيا
اعتبار الدورة الهيكلية للنظام حين النسبية المناطق الماصة للطاقة مع السماح بالمراقبة الكلية من خالل اإلزاحةب
. المرونة موافق
جانبية دنيا، بالتالي قدرة أدنى جساءةيضمن في قولبة تحديد األبعاد وفق اإلقتدار إدماجهاالدورة بنيةيتم تقدير
مراقبة الضرر الهيكلي من خالل مراقبة مستوى التشوه المسموح به أو مستوى ب التي تسمحللمقاومة المطلوبة
.لماطلية معين ل
هذا األخير إلى يستطيع إذا هذا البديل أن يكون محل حلقة مراقبة كلية لمستوى الضرر المسموح به إذا ترجم
تسمح إدخال نسبة تسليح قابلة العمل المباشر الخاص بالمراقبة المحلية من اقتراح عباراتأمكن.إزاحة نسبية
األمر الحمولة النازلة مع قيمة ثابتة إلزاحة المستوى اختالف توزيعالتعديل ألعمدة عدة آخذين بعين االعتبار
قتدار للتشوه الكلي المناسب لمستوى الضرر اإل أفضل للسلوك الهيكلي العام، الضامنجؤدي إلى إنساالذي سي
. كمعيار في سياق تحديد األبعاد رالمنشود ، إذا أخذ هذا األخي
.وبالتالي نستطيع إذن أن نشير إلى اقتدار التشوه للمستوى على غرار إزاحة المستوى
اقترحت في هذا السياق صيغة موحدة سهلة االستعمال تربط نسبة التسليح المشدود وماطلية التقوص للعتبات
خواص ال نسبة التسليح العرضي و...... خاصة نذكر منهارة آخذين بعين االعتبار مختلف العناصر المؤثالخرسانية
. للموادةالميكانيكي
ة انهيار سابق ألوانه أو هجرة حدثية للتشوهات الالدنة، اعتبارات قانونية المتعلقة بنواة العقد ي إمكانتفاديلكي يتم
, اقترحت قدة االلتواء الحديجمعت لتمكين إلهام مستقبلي، وصيغة جامعة بين التسليح العرضي للنواة وزاويقد
.التسليح العرضي خواص المواد مع عدد طبقات وقابلة التكيف مع تغير االنحناء للنواة
.هذه الصيغة تستعمل كأداة رقابة لمستوى الضرر الناجم
.

1
Introduction
L’essence d’une conception rationnelle est fidèlement traduite entre demande et
capacité. La philosophie de base dans la conception parasismique actuelle souligne de
nouveaux aspects tirés des derniers puissants tremblements de terre. Ces aspects sont
jugés comme très importants et doivent être donc introduits dans le dimensionnement
pratique. Afin de limiter les pertes économiques il devient nécessaire d'adopter une
approche de dimensionnement à plusieurs niveaux de performance. Il a été trouvé par
ailleurs que la conception à trois niveaux de performance où la méthodologie de
dimensionnement intéresse respectivement le service, l'endommagement et l'ultime ou
survie est la plus pratique. Pour aboutir à une conception rationnelle on doit adopter à
la limite une conception à deux niveaux de performance à savoir le service et l'ultime.
La cohérence dans la stratégie du dimensionnement parasismique exige la vérification
de la rigidité de la structure pour le niveau de service, la résistance pour le niveau
d'endommagement et la ductilité pour le niveau ultime. Vu les différences importantes
entre un séisme lointain et un séisme proche du foyer épicentral, il devient aussi vital
d'introduire l'effet d'impulsion caractérisant le séisme proche dans le
dimensionnement pratique.
Problématique
Le code RPA99 spécifie inconsidérablement 2 niveaux de performance (art1.2) :
- le premier relatif à un séisme modéré, relativement fréquent, exigeant une rigidité et
une résistance suffisante pour limiter les dommages structuraux et non structuraux.
- le second relatif à un séisme majeur, plus rare, exigeant une ductilité et une capacité
de dissipation d'énergie adéquate pour permettre à la structure de subir des
déplacements inélastiques avec dommages limités sans effondrement, ni perte de
stabilité.
Cependant son examen révèle qu'il n'adopte principalement qu'une procédure de
dimensionnement à un seul niveau concernant l'état limite ultime (ELU) satisfaisant la
"sécurité de la vie" (à l'instar des codes basés sur la conception en force) car le
premier niveau est nullement reflété au sein de ses clauses réglementaires. Ceci
implique que la structure peut être endommagée mais ne doit pas s'effondrer. On
constate en plus de cela, que la ductilité locale des éléments linéaires (poteaux et
2
poutres), n’a pas bénéficié de recommandations appropriées pouvant leur garantir
fidèlement le comportement escompté, du moment que la boucle de contrôle sur la
déformation au niveau des zones dissipatives d'énergie est carrément inexistante.
Faute d'outils le concepteur est dans l'impossibilité d'apprécier le niveau de ductilité
local ou de pouvoir le contrôler afin d'établir la corrélation nécessaire entre
comportement global, local de la structure, garantissant un comportement structurel
homogène.
Objectifs
La présente thèse a principalement pour but de passer en revue la procédure de
dimensionnement établie au sein du code RPA99 et apporter l’information et outils
nécessaires pour une éventuelle réhabilitation réglementaire. Cette dernière pourra se
concrétiser d’une part à travers une refonte globale en la structurant autour d’une
conception à 3 niveaux de performance où l’endommagement structurel et non
structurel sera la pierre angulaire; ou bien la hisser à une conception à 2 niveaux pour
répondre au minimum requis où la boucle de contrôle sur la déformation doit être
implicitement considérée à travers des recommandations spécifiques aux zones
critiques dissipatives d’énergie, tout en permettant un contrôle global à travers le
déplacement relatif de niveau en considérant la limite sur la période structurelle d’un
système élastiquement équivalent.
Dans le souci d'établir la cohérence nécessaire dans le processus de dimensionnement,
il devient impératif:
A- de spécifier des critères de performance pour le niveau de service en
recommandant des valeurs appropriées pour le déplacement relatif par exemple.
B- d'introduire pour le niveau ultime:
1- sur le plan du comportement structurel global
a- une nouvelle formulation pour le facteur de comportement en le reliant avec le
niveau de ductilité qui lui est concordant.
b- s'assurer du rapport des moments des poteaux sur ceux des poutres aboutissant au
même nœud, garantissant certes le mécanisme de rotulation des poutres.
3
2- réviser la limite sur la période élastique (si ce paramètre demeurera sélectionné
comme clivage de contrôle) fonction du niveau de ductilité de déplacement
concordant avec le facteur de comportement global.
3- sur le plan du comportement local:
a- poteaux :
Garantir la ductilité de section résultante du niveau de ductilité global fixé; à travers
l’utilisation d’une nouvelle formulation du ferraillage transversal fonction de la
flexibilité des poteaux, l’intensité de l’effort normal, le niveau d'endommagement et
le déplacement relatif de niveau tolérable.
b- poutres :
Utilisation d’une formule unifiée simple corrélant le taux d’armature tendue et la
ductilité de courbure des poutres en béton armé; tout en prenant en considération
l’incidence des différents paramètres affectant cette dernière notamment /' , le
taux d’armature transversale sh et les caractéristiques mécaniques des matériaux.
Etant donné que la tendance réglementaire actuelle est orientée vers la conception en
performance, ces 2 propositions pourront faire l’objet d’outils nécessaires permettant
au concepteur de contrôler et de garantir le niveau de ductilité désiré.
4- afin de se prémunir contre l'éventualité d'une ruine prématurée ou une migration
accidentelle des déformations plastiques,il devient nécessaire d’introduire une clause
réglementaire pour les noyaux des nœuds (inexistante jusqu'à présent) ou adopter une
formulation reliant l’armature transversale dans le noyau garantissant la résistance de
ce dernier tout en contrôlant sa déformation angulaire concordante avec un niveau
d’endommagement préalablement fixé
Ce complément réglementaire s'avère indispensable afin de hisser notre
réglementation parasismique en vigueur pour qu'elle puisse reposer réellement sur une
conception à 2 niveaux répondant ainsi au minimum requis, ou à 3 niveaux si
l’endommagement structurel sera pris en considération.
4
Organisation de la thèse
La thèse est présentée sous forme de chapitres traitant les différents paramètres
entrant dans le processus de dimensionnement parasismique des portiques autostables
en béton armé. Le travail a été subdivisé en 8 chapitres:
le chapitre 1, constitue l’introduction définissant la problématique du sujet et
les objectifs recherchés
le chapitre 2, donne un aperçu sur les notions de conception en performances
en introduisant les définitions nécessaires relatives aux niveaux de
performance, objectifs de performance, états limites à considérer, tout en
faisant allusion aux caractéristiques mécaniques couramment adoptées dans
une conception parasismique cohérente, dans laquelle les critères de
dimensionnement structurel sont exprimés en objectifs de performance à
atteindre. Un bref aperçu a été aussi attribué aux méthodes d’analyse,
méthodes de dimensionnement avec les critères qui leurs sont concordants
ainsi que des notions sur les spectres.
le chapitre 3, a été principalement orienté sur le comportement global, en
prenant en considération les deux paramètres régissant le comportement global
à savoir le niveau de demande ductilité de déplacement et le facteur de
comportement. Une présentation des différents mécanismes de ruine est
introduite en premier lieu, où la demande de ductilité de déplacement est
corrélée localement en ductilité de courbure ou de rotation au niveau des zones
nodales (poteaux et poutres) selon le mécanisme de ruine considéré. Comme le
code RPA a été initialement établi dans le format du code américain UBC, les
valeurs du coefficient de comportement R ont donc un caractère empirique
n’ayantaucune base technique et leurs fiabilités sur la performance présumée
de la réponse parasismique reste donc inconnue. Les différents termes entrant
dans la formulation de ce facteur ont été présentés en second lieu, mettant en
relief le déficit sécuritaire résultant de l’application de ce dernier tel qu’il est
établi par le code Algérien.
5
le chapitre 4, a été consacré à l’étude de la limite sur la période, introduite par
le code RPA comme facteur de contrôle dans le processus de
dimensionnement fonction du système structurel. Un travail a été entrepris
ayant pour but l'évaluation de cette limite à travers deux procédures basées sur
des méthodes approchées, en considérant un déplacement limite en tête (global
drift). Le niveau de ductilité concordant au coefficient de comportement
global est déterminé en exploitant les relations nTR communément
reconnues à travers le monde, et par l'occasion l'amortissement équivalent du
système structurel en utilisant des relations jugées satisfaisantes. L'étude
a englobé trois cas de figure de structures en portiques autostables, nus et avec
remplissage en maçonnerie rigide participante ou non participante; tout en
considérant la spécifité du sol d'assise, rocheux, ferme et alluvionnaire (très
meuble). L’évaluation de la période est conduite dans l’esprit de l’introduire
dans un coffrage d’un dimensionnement en capacité. Ce dimensionnement
consiste à garantir une rigidité latérale minimale (période maximale, Tmax)
d’où une capacité de résistance minimale requise pour contrôler
l’endommagement structurel à travers le contrôle d’un niveau de déformation
tolérable ou un niveau de ductilité donné. Cette alternative pourra donc faire
l’objet de boucle de contrôle globale du niveau d’endommagement tolérable si
ce dernier est traduit en déplacement relatif de niveau.
le chapitre 5, prend en considération le comportement local où la notion du
béton confiné est introduite à travers une étude bibliographique sur différents
modèles de confinement universellement établis ainsi que les paramètres
étudiés. Une évaluation de la capacité de déformation à travers le facteur de
ductilité de courbure a été par la suite entreprise mettant en évidence
l’influence de certains paramètres sur ce facteur notamment, la quantité de
l’armature longitudinale, la quantité de l’armature de confinement, sa
configuration ainsi que l’intensité de l’effort normal.Les longueurs de
confinement réglementaires universellement admises sont également
proposées en guise d’alternative pouvant servir à l’amélioration de la
réglementation parasismique algérienne en vigueur.
6
le chapitre 6,a été consacré à l’étude des éléments linéaires:
Le travail entrepris dans ce chapitre a porté principalement sur la proposition
d’outils permettant le contrôle sur la déformation locale tout en s’accordant
avec l’idée de capacité de déformation d’ensemble, afin de hisser la procédure
de dimensionnement actuelle vers une conception à 2 niveaux de performance.
Le travail présenté dans la première partie de ce chapitre a été consacré aux
poteaux, prend en considération un déplacement relatif d’étage limite et un
niveau d'endommagement modéré garantissant aussi bien la sécurité des vies
humaines que l'intégrité structurelle avec une éventuelle réparation non
onéreuse, a été conduit dans l'esprit de palier au vide réglementaire relatif à
l'estimation de la vulnérabilité sismique des portiques autostables en béton
armé. Des expressions ont été proposées reliant le rapport volumétrique de
l'armature transversale ( sh ), l’effort normal réduit ( 0NN ) et la flexibilité des
poteaux ( iL ) selon la classe de ductilité et le niveau d’endommagement
souhaité. Ces expressions permettent d’introduire un taux d’armature ajustable
pour les différents poteaux en prenant en considération une descente de charge
différente ainsi qu’un déplacement de niveau constant conduisant à une
meilleure cohérence du comportement global. Cette alternative permet le
contrôle sur la déformation locale tout en s’accordant d’une part avec l’idée de
capacité de déformation d’ensemble par rapport à un niveau
d’endommagement désiré; et d’autre part avec l’approche de
dimensionnement parasismique en performances. Ainsi on pourra alors parler
de capacité de déformation de niveau à l’instar d’un déplacement de niveau.
En prenant en considérant le niveau d’endommagement structurel, cette
alternative a été élargie de façon à pouvoir englober un troisième niveau de
performance.
L’étude entreprise dans la seconde partie de ce chapitre, a été consacrée à la
ductilité des poutres, éléments structuraux où la grande proportion de l’énergie
de dissipation prend place à travers un mécanisme flexionnel de rotules
plastiques. Ceci ne sera atteint qu’à travers une conception et un
dimensionnement conduisant à des sections exhibant un comportement
suffisamment ductile. Une formule unifiée simple d’utilisation a été proposée

7
dans ce contexte, corrélant le taux d’armature tendue et la ductilité de
courbure des poutres en béton armé; prenant en considération l’incidence des
différents paramètres affectant cette dernière notamment /' , le taux
d’armature transversale sh et les caractéristiques mécaniques des matériaux.
Ces deux propositions pourront faire l’objet d’outils nécessaires permettant au
concepteur de contrôler et de garantir le niveau de ductilité désiré.
le chapitre 7, a été dicté par le vide inhérent à notre code en vigueur relatif
aux noyaux des nœuds. Une recherche bibliographique sur le comportement
des nœuds sous cisaillement alterné, leur résistance à l’effort tranchant ainsi
qu’une revue sur les différents modèlesa été présentée en premier lieu. Afin
de se prémunir contre l'éventualité d'une ruine prématurée ou une migration
accidentelle des déformations plastiques, des considérations réglementaires
relatives aux noyaux de nœuds ont été rassemblées pouvant servir à une future
inspiration. Il est communément reconnu que la déformation angulaire du
noyau affecte directement la largeur des fissures, caractérisant de ce fait
l’endommagement structurel. Une formulation reliant l’armature transversale
du noyau à l’angle de distorsion limite a été proposée, pouvant servir d’outil
de contrôle du niveau d’endommagement résultant. Cette formulation
s’accorde avec le dimensionnement en performances et s’accommode avec la
variation de l’élancement du noyau, les caractéristiques des matériaux ainsi
que du nombre de lits à disposer latéralement.
le chapitre 8, porte les principales conclusions recueillies ainsi que lesrecommandations pour de futurs travaux de recherche.

8
2.1. Conception philosophique de base:
La procédure de dimensionnement structurel basé sur plusieurs niveaux de performance n'est pas un
concept nouveau. Sous chargement gravitaire, surcharge d'exploitation, neige, vent, les états limites
considèrent le service et le niveau ultime.
Les niveaux de performance visés par les codes courants relatifs aux bâtiments sont:
- sécurité sur les vies humaines
- contrôle de l'endommagement
- séisme de faible intensité (endommagement négligeable)
- séisme modéré (endommagement réparable)
- éviter l'effondrement lors d'un séisme majeur
Plusieurs interprétations ont été faites sur l'approche en performance, la définition la plus
appropriée est que cette approche se réfère à la méthodologie dans laquelle les critères de
dimensionnement structurel sont exprimés en objectifs de performance à atteindre. Ces objectifs
peuvent être un niveau de contrainte à ne pas dépasser, une charge, un déplacement, un état limite
ou un état d'endommagement.
Cependant la fiabilité de calcul actuel garantissant ces objectifs reste inconnue, à l'image des
critères de vérification spécifiques à un séisme faible ou modéré pouvant survenir fréquemment
dans la vie du bâtiment. Cependant la majorité des codes prennent comme règle un seul objectif de
performance garantissant la protection des occupants dans le cas d'un séisme majeur. En 1997
Bertero [1] a recensé 38 sur 41 codes parasismiques universellement établis basés sur un seul
critère de performance. Le constat établi après les séismes survenus récemment a montré que les
structures érigées conformément aux codes parasismiques modernes se sont comportées comme
prévu en enregistrant une perte de vies minimale. Cependant, la perte économique conséquente de
l'endommagement permanent est faramineuse (100 milliards en 1995 pour le Japon seul). Pour ce,
le contrôle de l'endommagement doit être plus explicite dans la conception parasismique
spécialement en sites urbains afin d'éviter le préjudice résultant.
La conception basée sur la performance (PBD) consiste en la sélection de critères de
dimensionnement pour un système structurel de façon que pour un niveau d'excitation tellurique
avec de niveaux définis de fiabilité, ce système ne sera pas endommagé au delà des états limites ou
9
d'autres limites considérées. Plusieurs étapes sont introduites pour que cette conception soit
cohérente:
- sélection des objectifs de performance
- définition des critères de dimensionnement à plusieurs niveaux
- spécifier les niveaux sismiques d'attaque correspondant aux différents critères
de dimensionnement
- considération de la conception parasismique globale
- options pour les méthodes d'analyse structurelles appropriées
- vérification numérique claire (compréhensible)
2.2. Objectifs de performance:
La performance à atteindre (satisfaire) peut être spécifiée à travers des limites sur n'importe quel
paramètre de réponse tel que:
- contraintes
- déformations
- déplacements
- accélérations
Les objectifs de performance sont des états d'acceptance de la performance de la structure. La
performance "cible" peut être caractérisée par des limites exprimées en termes de contraintes,
déformations, déplacements, accélérations etc…Pour ce, les objectifs de performance sont exprimés
en terme d'un état spécifique d'endommagement ou en probabilité de "ruine" contre une probabilité
prescrite d'un niveau "demande". Bien que les documents basés sur la philosophie en performance
avancent les mêmes concepts, cependant au niveau du détail ils spécifient différents niveaux de
performance [2]. Il est reconnu que les limites exprimées en déplacement relatif spécifiques à
différents niveaux d'endommagement peuvent varier considérablement fonction du système
structurel et du matériau de construction.
Cependant plus de recherche est nécessaire afin d'arrêter des estimations qualitatives réalistes
reliant déformation relative –état d'endommagement. En plus, les critères de dimensionnement
relatifs à différents paramètres restent à être définis pour différents niveaux de performance. Il
s'avère donc nécessaire d'apporter un consensus sur le nombre et la définition de ces niveaux de
performance associés aux états d'endommagement ainsi que les critères de dimensionnement qui
leur sont concordants afin d'implanter la conception en performance.
10
2.3. Niveaux de performance:
Le principe philosophique de base établi dans la conception parasismique est qu'il est
économiquement non justifiable que dans une zone sismique toutes les structures doivent être
conçues pour survivre au tremblement de terre le plus violent possible sans jamais enregistrer
d'endommagement. Il est donc plus raisonnable pour un séisme sévère de tolérer un certain niveau
d'endommagement tant que la ruine est évitée. Pour ce, les recommandations prescrites par les
codes parasismiques ne peuvent pas garantir pour les bâtiments courants érigés dans des zones
sismiques, de structure saine sans endommagement lors d'un séisme sévère. Il n'existe pas un
commun accord sur la définition du niveau d'endommagement acceptable suite à un séisme
spécifique mais des critères d'acceptance pour caractériser ces performances:
a- Sécurité des vies (Life safety): exigence fondamentale
b- Réparation de l'endommagement (Reparable damage): une distinction est faite entre
endommagement structurel réparable et endommagement structurel non réparable
c- Effondrement évité (Collapse prevention): afin d'éviter les blessures et les pertes en vies
humaines, la structure doit rester debout après un tremblement de terre.
Pour une performance structurelle définie en termes d'un état d'endommagement, la déformation
reste le meilleur indicateur. Il est communément admis d'exprimer les objectifs de performance en
faisant appel à un état d'endommagement spécifique ou une probabilité de ruine par rapport à un
niveau prescrit de demande probable.
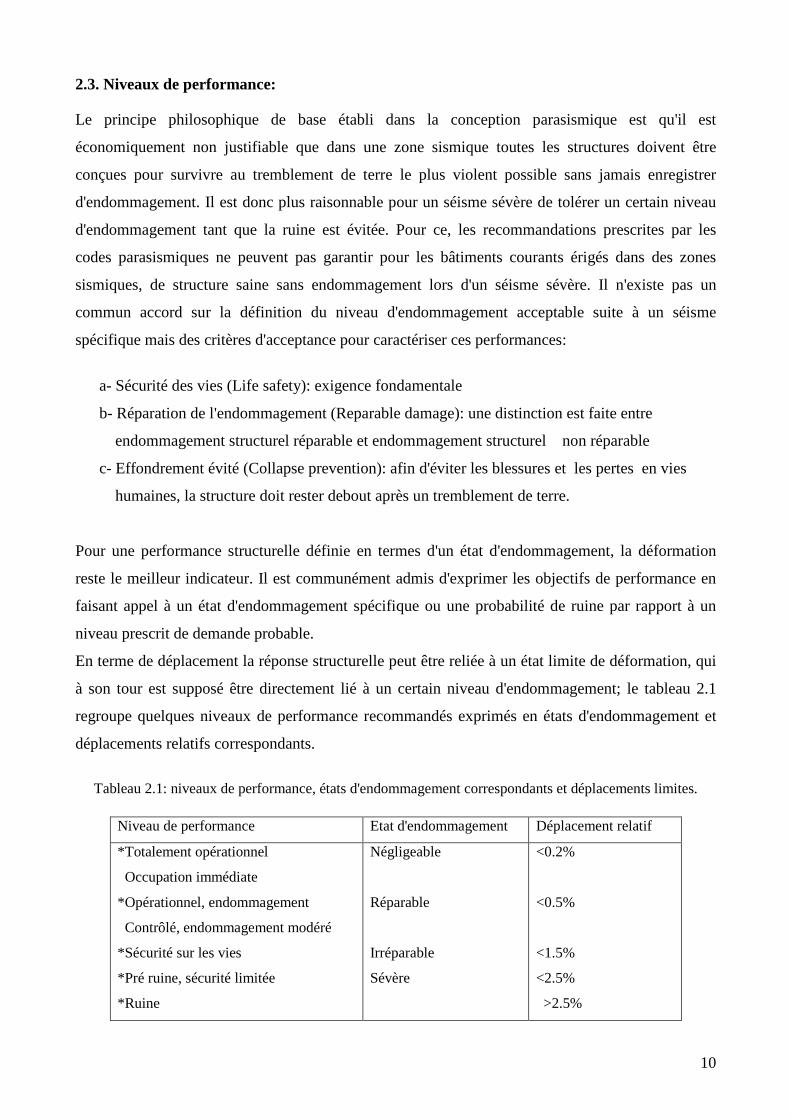
En terme de déplacement la réponse structurelle peut être reliée à un état limite de déformation, qui
à son tour est supposé être directement lié à un certain niveau d'endommagement; le tableau 2.1
regroupe quelques niveaux de performance recommandés exprimés en états d'endommagement et
déplacements relatifs correspondants.
Tableau 2.1: niveaux de performance, états d'endommagement correspondants et déplacements limites.
Niveau de performance Etat d'endommagement Déplacement relatif
*Totalement opérationnel
Occupation immédiate
*Opérationnel, endommagement
Contrôlé, endommagement modéré
*Sécurité sur les vies
*Pré ruine, sécurité limitée
*Ruine
Négligeable
Réparable
Irréparable
Sévère
<0.2%
<0.5%
<1.5%
<2.5%
>2.5%
11
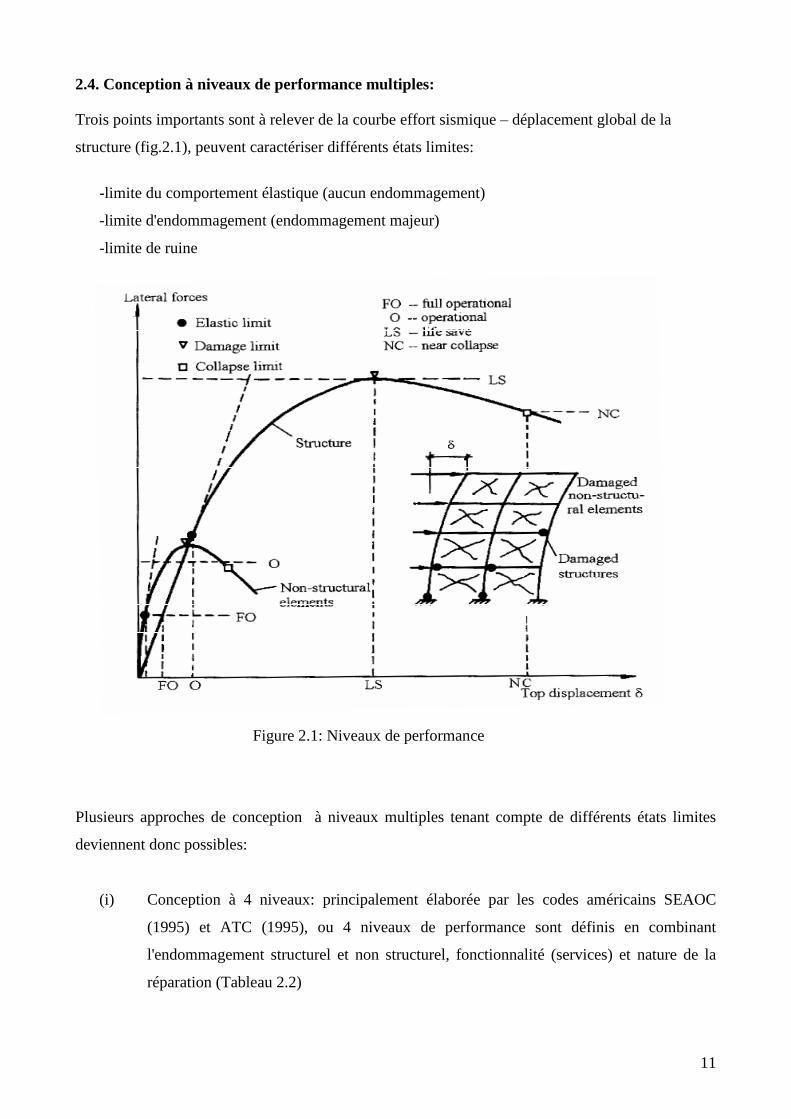
2.4. Conception à niveaux de performance multiples:
Trois points importants sont à relever de la courbe effort sismique–déplacement global de la
structure (fig.2.1), peuvent caractériser différents états limites:
-limite du comportement élastique (aucun endommagement)
-limite d'endommagement (endommagement majeur)
-limite de ruine
Plusieurs approches de conception à niveaux multiples tenant compte de différents états limites
deviennent donc possibles:
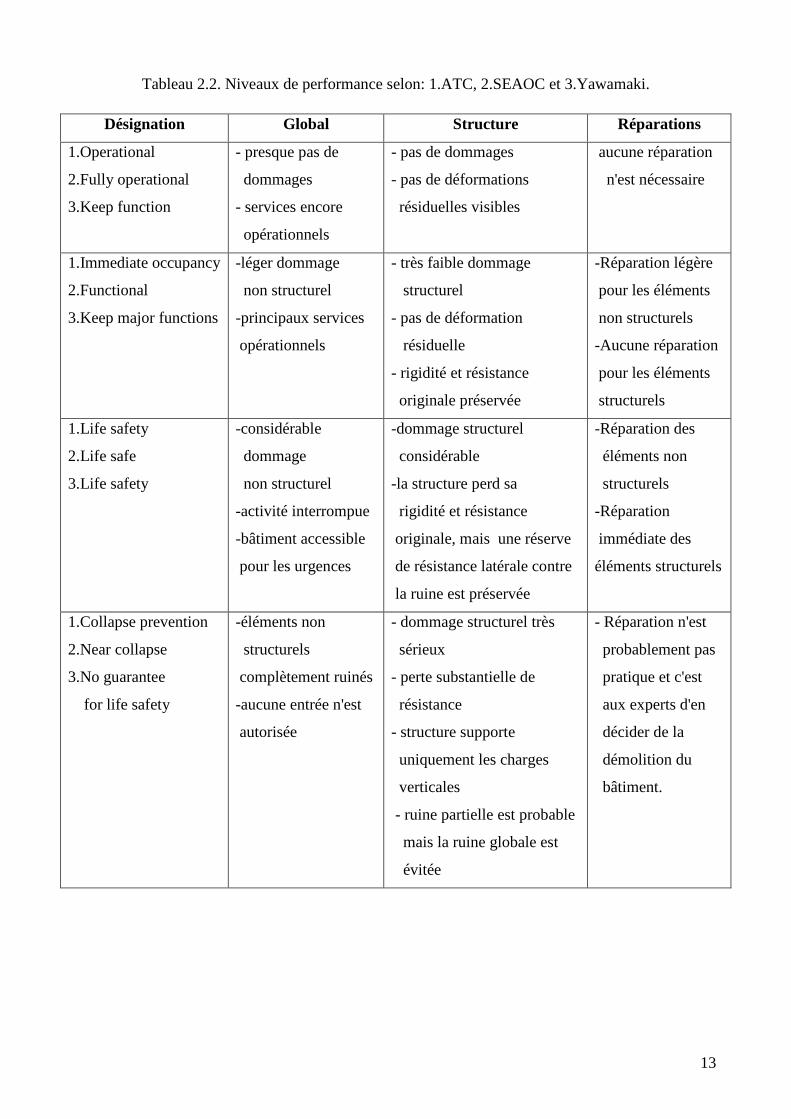
(i) Conception à 4 niveaux: principalement élaborée par les codes américains SEAOC
(1995) et ATC (1995), ou 4 niveaux de performance sont définis en combinant
l'endommagement structurel et non structurel, fonctionnalité (services) et nature de la
réparation (Tableau 2.2)
Figure 2.1: Niveaux de performance

12
(ii) Conception à 3 niveaux suggérée par plusieurs chercheurs [1] :
- Etat limite de service (SLS: serviceabilty limit state)
pour un séisme fréquent appelé aussi séisme de service. Cet état limite exige que
l'endommagement des éléments structuraux et non structuraux doit rester très faible. La
structure demeure dans le domaine élastique ou enregistrant de faibles déformations plastiques.
- Etat limite d'endommagement (DLS: damageabilty limit state)
pour un séisme occasionnel. Cet état limite considère une intensité sismique produisant un
endommagement modéré dans des éléments structuraux, réparable sans difficultés techniques.
- Etat limite ultime (ULS: survivabilty-ultimate limit state)
pour un séisme d'occurrence rare, résultant du plus fort tremblement de terre possible.
L'endommagement des éléments structuraux et non structuraux est prévisible; dans la majorité
des cas non réparable, cependant les vies sont préservées.
(iii) Conception à 2 niveaux : malgré qu'il est reconnu que la méthodologie idéale est
d'adopter 3 ou 4 niveaux de dimensionnement les codes en vigueur à l'instar de l'EC8 se
basent uniquement sur 2 niveaux [1]:
- Etat limite de service (SLS: serviceabilty limit state)
Structure conçue afin de demeurer élastique ou enregistrant de faibles déformations plastiques,
où les éléments non structuraux restent sains ou comportent un endommagement mineur.
- Etat limite ultime (ULS: survivabilty-ultimate limit state)
Pour lequel la structure exploite son aptitude de se déformer dans le domaine post-élastique
et les éléments non structuraux sont partiellement ou totalement endommagés.
Les accélérations correspondantes à l'ELS sont données par l'EC8 comme des fractions de celles
relatives à l'ELU. Cette méthodologie ne peut pas garantir un contrôle du niveau
d'endommagement, c'est pour ça que cette relation n'est pas clairement indiquée au sein de ce code.
13
Tableau 2.2. Niveaux de performance selon: 1.ATC, 2.SEAOC et 3.Yawamaki.
Désignation Global Structure Réparations
1.Operational
2.Fully operational
3.Keep function
- presque pas de
dommages
- services encore
opérationnels
- pas de dommages
- pas de déformations
résiduelles visibles
aucune réparation
n'est nécessaire
1.Immediate occupancy
2.Functional
3.Keep major functions
-léger dommage
non structurel
-principaux services
opérationnels
- très faible dommage
structurel
- pas de déformation
résiduelle
- rigidité et résistance
originale préservée
-Réparation légère
pour les éléments
non structurels
-Aucune réparation
pour les éléments
structurels
1.Life safety
2.Life safe
3.Life safety
-considérable
dommage
non structurel
-activité interrompue
-bâtiment accessible
pour les urgences
-dommage structurel
considérable
-la structure perd sa
rigidité et résistance
originale, mais une réserve
de résistance latérale contre
la ruine est préservée
-Réparation des
éléments non
structurels
-Réparation
immédiate des
éléments structurels
1.Collapse prevention
2.Near collapse
3.No guarantee
for life safety
-éléments non
structurels
complètement ruinés
-aucune entrée n'est
autorisée
- dommage structurel très
sérieux
- perte substantielle de
résistance
- structure supporte
uniquement les charges
verticales
- ruine partielle est probable
mais la ruine globale est
évitée
- Réparation n'est
probablement pas
pratique et c'est
aux experts d'en
décider de la
démolition du
bâtiment.
14
Par ailleurs [3] d'autres codes (new zélandais, japonais et chinois) spécifient deux niveaux; un état
limite ultime (ULS) préservant les vies humaines sous un séisme rare et un état limite de service
(SLS) limitant les dommages sous un séisme plus fréquent
Les clauses réglementaires du code parasismique Japonais (Building Standard Law of Japan) ont
été révisées en Juin 2000 avec l'esprit de réorientation vers la conception basée sur la performance
[4]. Les objectifs de performance sont les suivants:
a - sécurité sur les vies humaines
b- contrôle de l'endommagement pour 2 niveaux d'action sismique
- séisme de faible intensité
- séisme modéré
Deux états limites sont considérés afin de garantir la sécurité minimale, préservant les propriétés et
la vie de ses occupants.
a- pour la protection de la vie humaine, aucun étage ne doit être ruiné sous des conditions
d'action sismique ayant une période de retour de plusieurs centaines d'années (séisme rare ou
très rare).
b- l'endommagement doit être évité dans les portiques, éléments, les finitions internes et
externes pour des événements sismiques pouvant survenir plus d'une fois dans la vie du
bâtiment avec une période de retour variant entre 30 et 50 ans (séisme fréquent).
Le spectre de calcul relatif au début de l'état limite d'endommagement (IO: immediate occupancy)
est réduit au 1/5 du spectre relatif à l'état limite garantissant la vie humaine (LS: Life Safety). Ce
dernier état est supposé être atteint lorsque:
- les limites des matériaux sont atteintes au niveau de n'importe quel élément
- ou le déplacement d'étage atteigne 0.5% de sa hauteur pour n'importe quel niveau.
L'état limite garantissant la vie humaine est atteint lorsque la structure n'est plus en mesure de
supporter les charges verticales de calcul à n'importe quel étage sous de déformations horizontales
additionnelles; en d'autres termes si l'un des éléments structurels a atteint sa capacité ultime de
déformation. La déformation ultime doit être évaluée comme la somme des déformation de flexion,
de cisaillement et la déformation résultante de la déformation du nœud.
15
2.5. Cohérence dans la conception parasismique:
Dans ce contexte de conception de performance (PBD), pour un niveau déterminé d'excitation
sismique la structure est conçue de façon que sa performance reste entre les limites prescrites. Pour
atteindre ce niveau de vérification, le dimensionnement est conduit à travers la formulation "requis -
disponible" ou "demande - capacité":
Capacité requise≤ Capacité disponible
Trois paires de caractéristiques mécaniques sont couramment considérées dans le dimensionnement
parasismique: rigidité, résistance et ductilité.
Rigidité requise≤ Rigidité disponible
Résistance requise≤ Résistance disponible
Ductilité requise≤ Ductilité disponible
L'utilisation de 4 niveaux de performance est la plus rationnelle et celle à 2 niveaux représente
l'option minimale acceptable. Afin de réduire le travail de vérification, il paraît recommandable de
ne pas prendre en considération plus de 3 niveaux d'états limites (vérification), à savoir:
serviceability (service), damageability (endommagement) et survivability (ultime ou survie). Afin
d'établir la cohérence réglementaire, la structure doit être vérifiée pour les 3 états limites précités
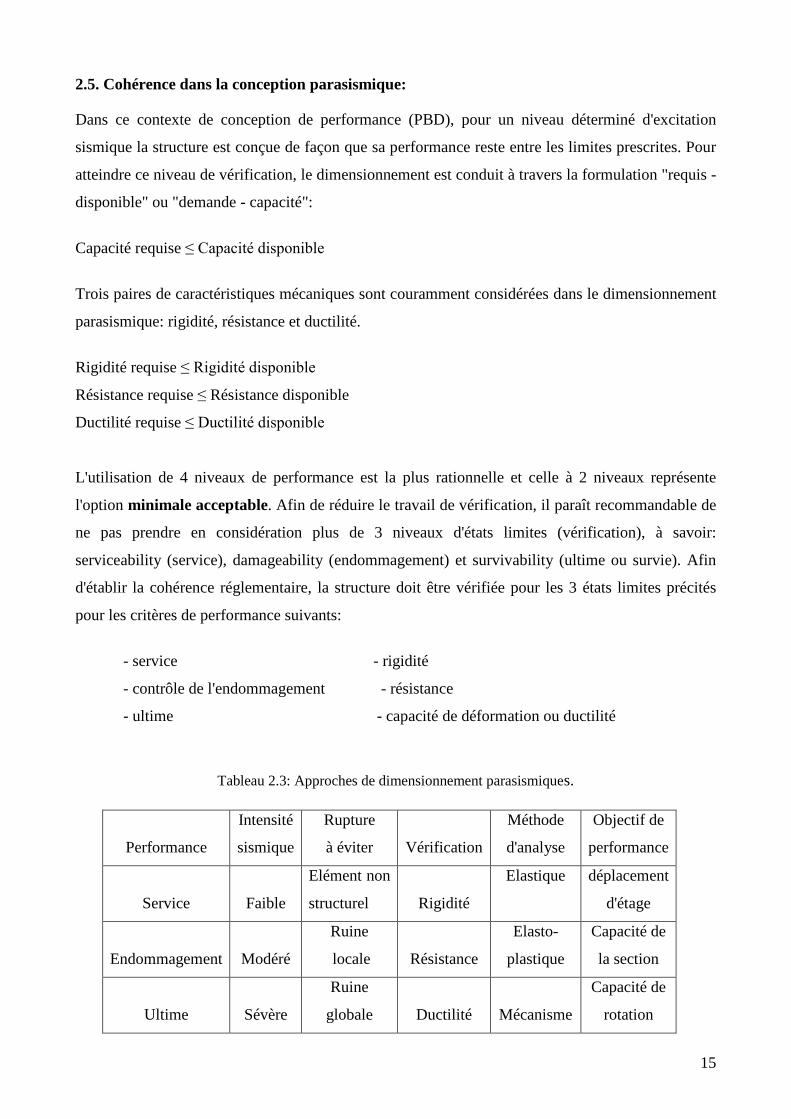
pour les critères de performance suivants:
- service - rigidité
- contrôle de l'endommagement - résistance
- ultime - capacité de déformation ou ductilité
Tableau 2.3: Approches de dimensionnement parasismiques.
Performance
Intensité
sismique
Rupture
à éviter Vérification
Méthode
d'analyse
Objectif de
performance
Service Faible
Elément non
structurel Rigidité
Elastique déplacement
d'étage
Endommagement Modéré
Ruine
locale Résistance
Elasto-
plastique
Capacité de
la section
Ultime Sévère
Ruine
globale Ductilité Mécanisme
Capacité de
rotation
16
Le tableau 2.3 et la figure 2.2 montrent la relation entre les niveaux de performance et les autres
paramètres de la conception parasismique.
Les niveaux de performance sont reliés à l'aléa sismique ainsi qu'aux niveaux de conception ou états
limites [2]. Le tableau 4 regroupe quelques niveaux d'aléas sismiques proposés dans la littérature.
Tableau 2.4: Niveaux d'aléas sismiques proposés.
Fréquence sismique Période de retour (années) Probabilité de dépassement
Fréquent
Occasionnel
Rare
Très rare
Extrêmement rare
43
72
475
970
2475
50% dans 30 ans
50% dans 50 ans
10% dans 50 ans
5% dans 50 ans
2% dans 50 ans
Figure 2.2. Réponse structurelle pour différents niveaux de chargement

17
Les intensités des séismes de dimensionnement sont déterminées fonction d'une probabilité de
dépassement dans 50 ans; considérée comme la période pour laquelle le bâtiment est entretenu sans
aucune intervention structurelle. Il faut cependant signaler que si pour un séisme rare ou très rare les
périodes de retour proposées dans la littérature sont satisfaisantes, pour les séismes fréquent et
occasionnel ces périodes sont très divergentes [1]. Ceci est du à la difficulté de choisir un critère
rationnel pour des états limites de non endommagement conjuguée avec une définition très
arbitraire du niveau d'endommagement.
Pour une évaluation approximative et en guise de simplification, des accélérations correspondantes
aux différents niveaux de performance sont proposées:
-serviceability 0.4A
-damageability A
-survivability 1.6A
avec A: accélération déterminée avec une période de récurrence de 50ans
2.6. Définition des différents états limites:
Serviceability level : E.L.S
La structure doit exhiber un comportement élastique sous un séisme fréquent de faible intensité. Les
déformations latérales sont contrôlées par le déplacement relatif d'étage limite donné pour les
éléments non structuraux. L'interaction des éléments structuraux et non structuraux doit être prise
en considération. La vérification de base concerne la rigidité, cependant la vérification de la
résistance reste facultative.
Damageability level : E.L.E
Une analyse élasto-plastique est menée sous un séisme occasionnel modéré. Les déformations
latérales sont contrôlées par le déplacement relatif d'étage limite donné pour les éléments non
structuraux. Comme les éléments non structuraux sont partiellement endommagés l'analyse
structurelle est menée sans aucune interaction avec ces derniers. La vérification de base concerne la
résistance, cependant les vérifications de la rigidité et de la ductilité sont optionnelles.
18
Survivability level: E.L.U
Une analyse plastique est menée sous un séisme sévère rare, considérant le comportement d'un
éventuel mécanisme de rotules plastiques. La vérification de base concerne la ductilité, cependant la
vérification de la résistance est seulement optionnelle. Les éléments non structuraux sont
totalement ruinés et la stratégie de dimensionnement se réfère au contrôle de la formation du
mécanisme de rotulation désiré (séquence de rotulation) ainsi que la capacité de rotation des rotules
plastiques.
On peut dire qu'une solution structurelle capable de satisfaire simultanément 2 niveaux d'exigence
ou plus représente un cas de dimensionnement optimal.
2.7. Méthodes d'analyse:
Les méthodes classiques pour le calcul sismique ont pour objectifs de fournir une capacité de
résistance et déformation (ductilité) suffisantes afin de préserver les vies humaines et déplacements
limites en service afin de contrôler les dégâts qui peuvent survenir. Les critères de calcul sont
définis par les contraintes limites et forces évaluées dans les éléments structuraux à partir des
niveaux prescrits sur l'effort tranchant latéral appliqué. Des modèles élastiques linéaires, non
linéaires ou inélastiques non linéaires sont utilisés fonction du niveau de la réponse structurelle.
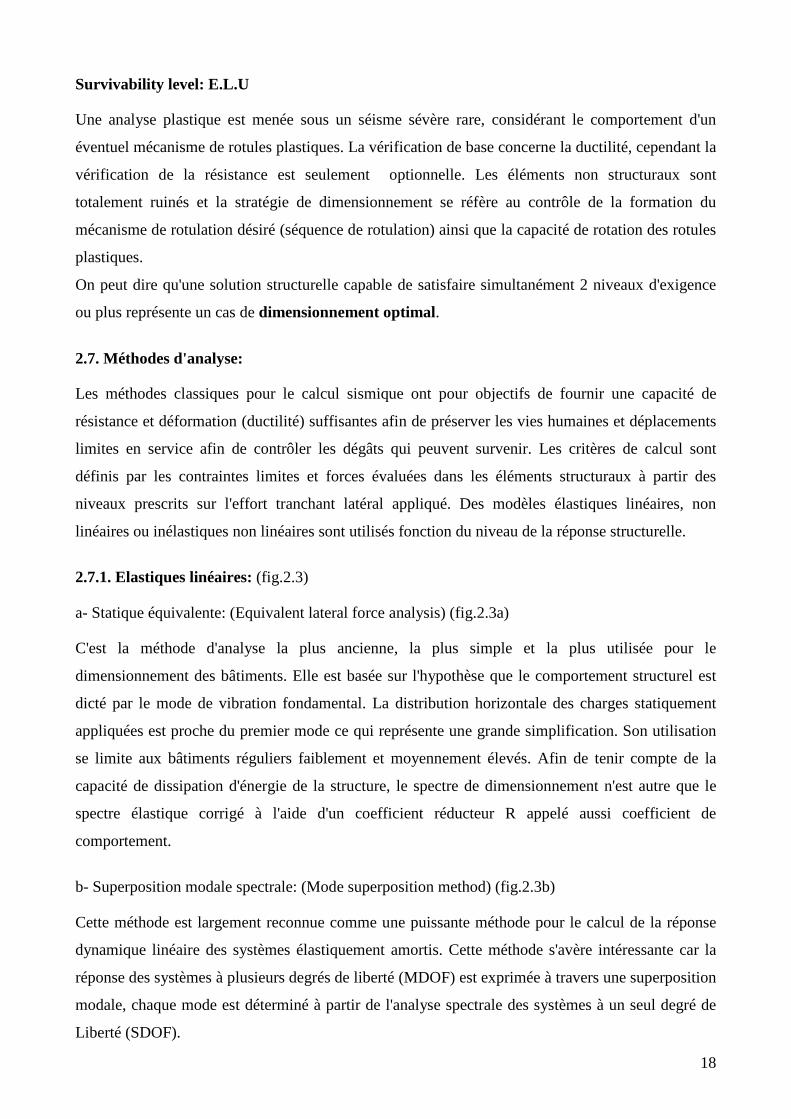
2.7.1. Elastiques linéaires: (fig.2.3)
a- Statique équivalente: (Equivalent lateral force analysis) (fig.2.3a)
C'est la méthode d'analyse la plus ancienne, la plus simple et la plus utilisée pour le
dimensionnement des bâtiments. Elle est basée sur l'hypothèse que le comportement structurel est
dicté par le mode de vibration fondamental. La distribution horizontale des charges statiquement
appliquées est proche du premier mode ce qui représente une grande simplification. Son utilisation
se limite aux bâtiments réguliers faiblement et moyennement élevés. Afin de tenir compte de la
capacité de dissipation d'énergie de la structure, le spectre de dimensionnement n'est autre que le
spectre élastique corrigé à l'aide d'un coefficient réducteur R appelé aussi coefficient de
comportement.
b- Superposition modale spectrale: (Mode superposition method) (fig.2.3b)
Cette méthode est largement reconnue comme une puissante méthode pour le calcul de la réponse
dynamique linéaire des systèmes élastiquement amortis. Cette méthode s'avère intéressante car la
réponse des systèmes à plusieurs degrés de liberté (MDOF) est exprimée à travers une superposition
modale, chaque mode est déterminé à partir de l'analyse spectrale des systèmes à un seul degré de
Liberté (SDOF).
19
Figure 2.3: Méthodes d'analyse élastique linéaire
(a) Statique équivalente(b) Superposition modale(c) Temporelle
20
L'analyse modale consiste à combiner la réponse des différents modes par des règles de
superposition modale afin d'obtenir la moyenne de la réponse structurelle maximale. Cependant
cette méthode présente 2 principaux inconvénients à savoir:
- le calcul des fréquences de vibration pour chaque mode, qui varie réellement durant
l'évènement sismique à cause du changement de rigidité (formation des rotules plastiques,
l'endommagement des éléments structuraux et non structuraux) et la rigidité du sol d'assise
(adoucissement du sol pour de larges déformations, interaction sol - structure).
- l'utilisation d'un facteur de comportement constant pour un niveau de ductilité donné (car le
facteur de comportement est fonction de la période de vibration)
c- Analyse temporelle élastique: (Elastic time-history analysis, ETHA)
C'est l'analyse de la réponse dynamique linéaire (fig.2.3c) faite par intégration directe dans le temps
des équations du mouvement. L'un des principaux avantages de cette procédure c'est de conserver
les réponses avec leurs signes respectifs. Néanmoins elle ne donne qu'un aperçu limité sur la
réponse structurelle inélastique sous un séisme sévère.
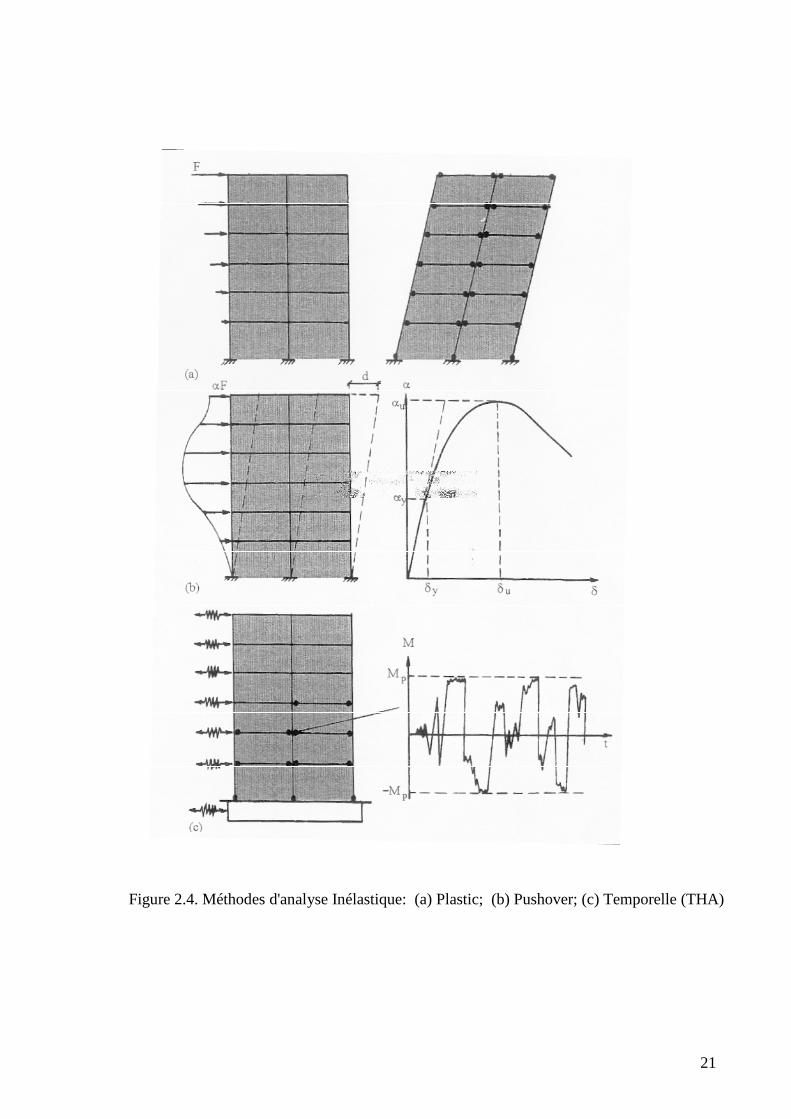
2.7.2- Non linéaires et inélastiques non linéaires: (fig.2.4)
a- Analyse plastique: (Plastic analysis)
Cette procédure (fig2.4a) a été initialement développée pour les portiques métalliques afin de tirer
profit de la redistribution des contraintes dans des systèmes redondants ductiles au delà des charges
élastiques limites. Elle est généralement utilisée pour établir le mécanisme de ruine afin de
comprendre le comportement ultime de la structure.
b- Analyse Pushover (Push-over analysis)
La structure est soumise à un chargement incrémental distribué le long de la hauteur et la courbe
inélastique charge - déplacement est obtenue en contrôlant le déplacement en tête de structure
(fig2.4b). La méthode est relativement simple et fournit l'information concernant la résistance, la
déformation, la ductilité et la distribution de la demande statique non linéaire; ce qui permet
d'identifier les éléments critiques pouvant atteindre les états limites lors d'un séisme. Malgré
quelques limitations qui lui sont inhérentes telle que la négligence de la variation des allures de
chargement ainsi que l'influence des modes supérieurs, cette méthode donne une estimation
raisonnable de la capacité de déformation globale spécialement pour les structures où le premier
mode est prépondérant. Elle est plus appropriée pour des périodes courtes et structures faiblement
élevées [5].
21
Figure 2.4. Méthodes d'analyse Inélastique: (a) Plastic; (b) Pushover; (c) Temporelle (THA)
22
c- Analyse temporelle inélastique (Inelastic time-history analysis, ITHA or Non-linear response
history analysis RHA)
Cette méthode est basée sur l'intégration directe des équations de mouvement ou des algorithmes
contenant les déformations élastoplastiques de la structure sont adoptés. Cette analyse est conduite
en utilisant les enregistrements réels ou simulés. La variation des déplacements à différents niveaux
du portique est représentée sur la figure 2.4c. Cette méthode est la seule apte à décrire le
comportement actuel lors d'un séisme, cependant le grand problème réside dans le choix d'un
enregistrement (accélérogramme) propre, du fait de la grande variabilité induite par la nature du sol
et la distance de la source. Il devient don essentiel d'utiliser plusieurs types d'enregistrements ou un
accélérogramme artificiel contenant les principales caractéristiques.
d- Analyse modale pushover (Multimodel Pushover Analysis, MPA)
Récemment développée, cette méthode est considérée comme une amélioration significative de
l'analyse statique pushover couramment utilisée (POA), en prenant en compte la contribution des
modes supérieures à la réponse ou la distribution des forces d'inertie à cause de la dégradation de
rigidité. La distribution le long de la hauteur de la réponse estimée par la méthode modale pushover
(MPA) est généralement similaire aux résultats dits "exacts" obtenus à l'aide de l'analyse temporelle
inélastique (RHA) [6], du fait de la comparaison établie sur les valeurs médianes (moyennes) du
déplacement d'étage (demandes). Cette étude a montré que la méthode MPA donne une bonne
estimation de la variation de la demande le long de la hauteur du bâtiment. Cependant l'écart
enregistré par celle ci tend à augmenter pour des périodes longues et des hauts niveaux de ductilité.
Il a été par ailleurs constaté [7] que cette méthode comparativement avec la méthode RHA:
produise de très bons résultats pour des structures faiblement étagées (jusqu'à 5 niveaux) pour
les déplacements d'étages ainsi que pour les rotations des rotules plastiques.
surestime légèrement la réponse non linéaire pour les niveaux inférieurs et surestime celle des
niveaux supérieurs des structures moyennement élevées (jusqu'à 10 niveaux); même
constatation que pour la méthode statique pushover avec chargement linéaire triangulaire
(TLPOA).
prédit les déplacements d'étage d'une manière excellente des niveaux supérieurs d'une structure
élevée (entre 20 et 30 niveaux), mais elle reste à l'instar de la procédure (TLP) dans l'incapacité
de prédire d'une manière exacte la rotation des rotules plastiques.
23
2.8. Méthodes de dimensionnement:
Il est d'un commun accord que les futurs codes parasismiques doivent être basés sur des objectifs
multiples de performance associés à différents niveaux d’aléa sismique. L'avantage du
dimensionnement en performance est la possibilité d'atteindre la performance parasismique avec un
risque uniforme. Cependant la fiabilité de cette approche repose sur le développement de critères de
performance explicites et quantifiables pouvant être reliés aux paramètres de réponse pouvant être
calculés tels que: contraintes, déformations, déplacements, accélérations et leurs dérivés.
Malheureusement les procédures de calcul établies par les codes en vigueur comportent des
incertitudes concernant la demande et la capacité sismique de la structure.
Une méthodologie de dimensionnement cohérente a été élaborée par Bertero [1] tenant compte
simultanément de la rigidité, résistance et ductilité dès les premières étapes de la procédure de
dimensionnement. Cette procédure consiste en 2 phases distinctes:
1- la première; préliminaire établissant les principales caractéristiques de la structure, couvrant
l'acquisition et le traitement des données nécessaires pour le dimensionnement:
- nature du sol et sa topographie
- information concernant les sources sismiques possibles ou potentielles
- périodes de retour pour différents niveaux sismiques, périodes caractéristiques,durées…
Le data récolté est traduit en valeurs de calcul comme accélogrammes, spectres…Après cela, la
configuration générale du bâtiment, système structurel, matériau, éléments non structuraux sont
arrêtés. Un prédimensionnement préliminaire des éléments structuraux est enfin introduit tenant
compte de toutes les exigences ou demandes de performance. Cette phase préliminaire est un
processus interactif où d'additionnelles modifications jugées nécessaires seront introduites afin de
converger vers la solution la plus proche possible du dimensionnement final désiré.
2- la deuxième; finale donnant les détails pour la phase de construction.
L'analyse du bâtiment conduite révèle que la conception préliminaire est satisfaisante et quelques
changements mineurs seulement seront nécessaires pour le dimensionnement final. Les procédures
les plus utilisées pour cette phase sont énumérés comme suit:
Dimensionnement en force: (Force Based Design; FBD)
approche communément utilisée de nos jours se basant sur le fait de doter la structure d'une
résistance latérale minimale pour résister aux charges sismiques, en supposant qu'elle se comporte
24
dans le domaine non linéaire d'une façon adéquate. C'est pour cette raison qu'uniquement quelques
détails et dispositions constructives sont recommandées afin qu'elles soient satisfaites. Le règlement
parasismique algérien RPA 99 [8] appartient à cette catégorie de codes.
Dimensionnement en déplacement: (Displacement Based Design; DBD)
comme l'endommagement des structures soumises aux séismes est résultant des déformations
excessives; cette méthode s'articule directement sur la déformation plutôt que de fournir simplement
une résistance latérale comme requis par le dimensionnement en force, donnant ainsi une meilleure
perception des performances attendues.
Dimensionnement en capacité: (Capacity Based Design; CBD)
basée sur les principes des codes parasismiques courants qui autorisent l'incursion dans le domaine
postélastique; cette méthode fournit une capacité de ductilité adéquate pour les zones dissipatives
d'énergie afin d'éviter la ruine des structures résistantes. Pour ce, un mécanisme de rotulation
plastique est choisi avec un type de distribution de la force latérale recommandée par les codes,
pour s'assurer que les déformations plastiques surviennent uniquement dans les zones préalablement
sélectionnées. Ces dernières seront conçues dans le détail de façon à satisfaire leur demande de
ductilité, tout en conférant une sur résistance (réserve de résistance) pour les autres parties de la
structure de façon qu'elles puissent exhiber un comportement élastique. En d'autres termes, ces
déformations resteront confinées dans les zones présélectionnées.
Afin de réduire les coûts élevés dus à la mise hors service ou à la réparation des structures
gravement détériorées, différents niveaux de performance doivent être considérés; et l'utilisation des
déformations d'ELS permet d'atteindre un niveau d'évaluation assez consistant. En effet le
dimensionnement basé sur la performance parasismique est une nouvelle approche qui associe les
méthodes traditionnelles de dimensionnement parasismique avec de significatives améliorations.
Le dimensionnement en Performance (PBD) et le dimensionnement en Déplacement (DBD) ont été
interchangeablement utilisés. Ceci a été basé sur l'idée que les objectifs de performance (critères)
sont reliés au niveau d'endommagement structurel, qui à son tour est relié au déplacement en tête et
au déplacement relatif d'étage (drift). Cependant cette hypothèse est trop simplifiée du moment que
le niveau d'endommagement est influencé par d'autres paramètres tels que:
-accumulation et distribution de l'endommagement structurel
-modes de rupture des éléments
-le nombre de cycles et la durée du séisme
-le niveau d'accélération dans le cas d'éléments secondaires.
25
Les procédures développées pour l’analyse et le dimensionnement parasismique en performance
appartiennent à différentes catégories notamment : approches en déplacement, en performance et
spectre de capacité. Les deux dernières méthodes ont commencé à être intégrées dans la génération
des nouveaux codes ; une forme simplifiée du dimensionnement en performance est déjà implantée
au sein du code New Zélandais [9]. Chacune de ces procédures essaye de modéliser le
comportement des systèmes structurels retraçant aussi bien la réponse élastique et dans la majorité
des cas la réponse inélastique. Quoique les principes théoriques de base ont été largement couverts,
la relation entre la réponse spectrale élastique et inélastique est complexe. Les procédures
introduisent essentiellement la modification du spectre de réponse élastique à travers un coefficient
R appelé coefficient de réduction de la force élastique qui tient compte de la réduction de rigidité et
l’augmentation de l’amortissement dû à la réponse hystérétique inélastique des éléments avec
possible dégradation de résistance. La représentation de la réponse inélastique spectrale a été
initialement introduite à l’aide de la technique du spectre de capacité reliant la capacité sismique
(comme relation inélastique force – déplacement, la force étant équivalente à l’accélération
sismique) à la demande représentée simultanément en accélération sismique et déplacement de la
réponse spectrale. Une telle représentation permettra une relative évaluation entre demande et
capacité. L’influence du changement de période sur la demande sismique enregistrée par la
structure durant la réponse sismique est aussi tracée par le spectre de capacité, pendant que les
valeurs fixées des périodes sont représentées par des lignes radiales. La méthodologie générale
pour le calcul basé sur la performance parasismique peut inclure différentes procédures.
a- conduire le calcul selon l'approche traditionnelle basée sur la force (FBD), une fois
le dimensionnement terminé les déformations et les dommages peuvent être déterminés et
contrôlés c'est à dire comparés aux limites prescrites.
b- commencer par proportionner la structure sur la base du déplacement en tête
à un certain niveau (ou critères) de performance et mener ensuite l'analyse de la réponse
sismique.
L'analyse non linéaire simplifiée basée sur l'analyse pushover et l'analyse temporelle inélastique
pour déterminer la capacité et sur le spectre de calcul pour déterminer la demande. Pour chaque
étape de calcul les paramètres de réponse tels que contraintes, déformations, accélération
structurelle, rapport de ductilité demande et énergie dissipée sont évaluées en termes de demande
contre capacité.
26
Pour ce, les valeurs limites typiques de ces paramètres doivent être établies pour chaque niveau de
performance à travers une recherche incluant des tests de laboratoire. Ces valeurs limites peuvent
être validées en analysant des bâtiments qui ont enduré des événements sismiques ayant leurs
enregistrements disponibles et des états d'endommagement mesurés.
L'analyse pushover statique non linéaire peut fournir la majorité de l'information nécessaire. Dans
cette analyse la structure sollicitée horizontalement par un chargement ayant une allure
prédéterminée ou ajustable, est poussée statiquement jusqu'au déplacement "cible" pour lequel la
structure est évaluée.
Un bref descriptif [2] de quelques règlements basés sur la conception en performance est donné
comme suit:
SEAOC:
Développer une nomenclature de procédures gouvernent le dimensionnement des structures en
prédisant une performance parasismique s'accommodant différents objectifs de performance. Le
document présente les concepts et fixe les niveaux de performance pour des systèmes structurels et
non structurels. Cinq niveaux de performance sont décrits à travers des limites spécifiques au
déplacement en tête permanent ou transitoire. Pour ce, les principes du dimensionnement en
capacité sont recommandés à être appliqués afin de guider l'analyse de la réponse inélastique de la
structure, localiser les liaisons ductiles et évaluer les forces latérales résultantes.
Plusieurs approches de dimensionnement sont possibles pouvant inclure différentes procédures
d'analyse élastique et inélastique telles que:
1- méthode conventionnelle basée sur force - résistance
2- dimensionnement basé sur le déplacement
3- approche en énergie
4- approche prescrite de dimensionnement
ATC: Applied Technology Council ATC 40
Le document se limite au bâtiment et recommande l'utilisation de la méthode du spectre de capacité.
La procédure s'articule sur la détermination et la conjugaison des spectres de demande et de
capacité. Construire le spectre de capacité, la courbe force - déplacement d'un point de la structure
est déterminée en utilisant l'analyse statique nonlinéaire (pushover analysis). Les forces et les
27
déplacements sont reconvertis en accélérations spectrales et déplacements spectraux ( format AD)
en utilisant un système équivalent à un seul degré de liberté (SDOF).
La demande sismique est déterminée en utilisant un spectre élastique hautement amorti. Le point
caractérisant le niveau de performance suppose l'égalité entre capacité et demande sismique, fournit
ainsi une estimation sur l'accélération (strength) et une estimation sur le déplacement (demande).
Il faut noter par ailleurs que l’utilisation du spectre inélastique est considéré plus approprié que
l’utilisation d’un spectre élastique équivalent hautement amorti [10].
FEMA: Federal Emergency Management FEMA 273
Présente une variété d'objectifs de performance associés à des séismes probabilistes. Les méthodes
d'analyse et de dimensionnement pour une performance à niveaux multiples vont de l'élastique
linéaire à l'analyse inélastique temporelle. Le document définit les niveaux de performance pour les
éléments non structuraux, et recommande des déplacements d'étage limites concordants à différents
niveaux de performance, et ce, pour différents systèmes structurels autostables.
2.9. Dimensionnement en déformation contrôlée:
L'approche la plus appropriée afin de satisfaire les objectifs du dimensionnement parasismique en
performance paraît être l'approche en déformation contrôlée. Cette approche est sélectionnée pour
être introduite dans les codes futurs, en améliorant la conception en force (FDB) et en développant
encore l'approche en capacité à travers la vérification des déformations objectifs et par le
développement de procédures de dimensionnement direct basé sur la déformation où le point de
départ seront les déformations cibles.
Au risque de sacrifier la simplicité, il est important d'obtenir une bonne estimation de la
déformation (déplacement) locale au sein de la structure, prendre en considération les effets des
modes supérieures et la séquence de rotulation des éléments. L'analyse statique non linéaire
(nonlinear static pushover analysis) conjuguée avec de nouvelles méthodes (autre que SDOF-based
spectra) ou l'analyse dynamique inélastique non linéaire peut donner une prédiction de la
performance d'une façon plus fiable.
La grande majorité des méthodes de dimensionnement directe en déplacement ou dimensionnement
en déformation contrôlée utilisent des systèmes linéairement équivalents caractérisés par un
amortissement effectif élevé et une rigidité sécante correspondant à la réponse max. Cette
alternative figure parmi les approches possibles pour la détermination de la demande sismique, car
28
le spectre inélastique peut être aussi utilisé comme il a été indiqué par Fajfar [11] et démontré par
Chopra et Goel [12].
A titre d'indication une procédure pour le calcul sismique adaptant les recommandations du code
EC8 a été proposée par Kappos et al [13] peut facilement s'inscrire dans cet esprit. Cette procédure
s'articule d'une part sur l'analyse THA, et sur l'analyse pushover statique nonlinéaire d'autre part, en
considérant deux états limites distincts:
1. ELS (serviceability) (IO ou occupation immédiate, 50% de dépassement en 50 ans), nécessitant
le contrôle:
- du déplacement relatif maximal qui ne doit pas dépasser les limites entraînant
l'endommagement des éléments non structuraux nécessitant ainsi réparation. Si ce critère n'est
pas respecté, le renforcement de la structure s'avère donc nécessaire en augmentant le coffrage.
- les rotations plastiques des zones critiques des poutres restent inférieures à la valeur
correspondante à la fissuration non tolérée (nécessitant réparation). Si la ductilité spécifiée est
dépassée au sein de certains éléments, le ferraillage correspondant est augmenté. Il faut par
ailleurs signaler que les 2 critères doivent être satisfaits du fait de leur complémentarité. Le
premier est relatif à l'endommagement des éléments non structuraux alors que le deuxième
concerne l'endommagement des éléments structuraux.
2. ELU (life safety: sécurité des vies) avec endommagement réparable
l'évènement sismique correspond à une probabilité de dépassement de 10% en 50 ans (rare). C'est
le séisme de calcul recommandé par la plupart des codes courants.
A titre d'indication, l'EC8 recommande pour le séisme de service 1/2 à 1/2.5 de la valeur du séisme
de calcul (sous révision), et pour les déformations les valeurs suivantes:
-déplacement d'étage 0.2%≤δ≤0.5%;
0.2% pour un remplissage en maçonnerie en contact avec le portique
0.5% pour panneaux légers et contreplaqué
-rotation plastique des poutres ≤0.005rd
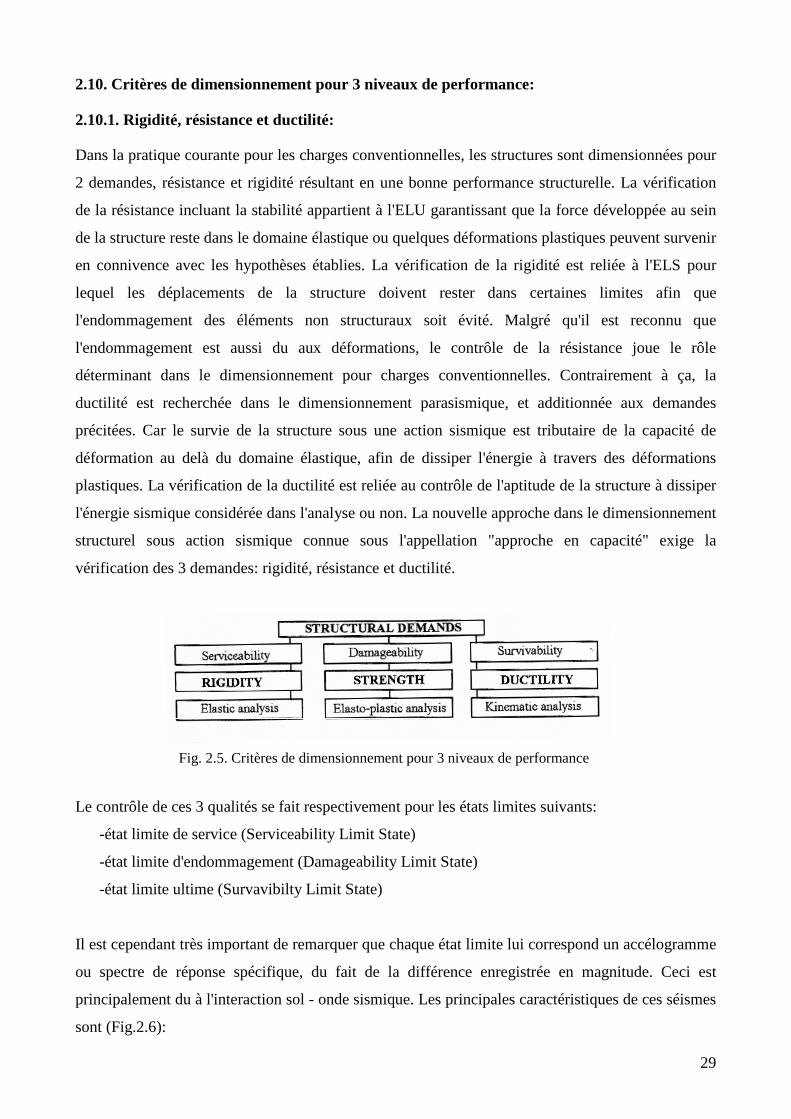
29
2.10. Critères de dimensionnement pour 3 niveaux de performance:
2.10.1. Rigidité, résistance et ductilité:
Dans la pratique courante pour les charges conventionnelles, les structures sont dimensionnées pour
2 demandes, résistance et rigidité résultant en une bonne performance structurelle. La vérification
de la résistance incluant la stabilité appartient à l'ELU garantissant que la force développée au sein
de la structure reste dans le domaine élastique ou quelques déformations plastiques peuvent survenir
en connivence avec les hypothèses établies. La vérification de la rigidité est reliée à l'ELS pour
lequel les déplacements de la structure doivent rester dans certaines limites afin que
l'endommagement des éléments non structuraux soit évité. Malgré qu'il est reconnu que
l'endommagement est aussi du aux déformations, le contrôle de la résistance joue le rôle
déterminant dans le dimensionnement pour charges conventionnelles. Contrairement à ça, la
ductilité est recherchée dans le dimensionnement parasismique, et additionnée aux demandes
précitées. Car le survie de la structure sous une action sismique est tributaire de la capacité de
déformation au delà du domaine élastique, afin de dissiper l'énergie à travers des déformations
plastiques. La vérification de la ductilité est reliée au contrôle de l'aptitude de la structure à dissiper
l'énergie sismique considérée dans l'analyse ou non. La nouvelle approche dans le dimensionnement
structurel sous action sismique connue sous l'appellation "approche en capacité" exige la
vérification des 3 demandes: rigidité, résistance et ductilité.
Le contrôle de ces 3 qualités se fait respectivement pour les états limites suivants:
-état limite de service (Serviceability Limit State)
-état limite d'endommagement (Damageability Limit State)
-état limite ultime (Survavibilty Limit State)
Il est cependant très important de remarquer que chaque état limite lui correspond un accélogramme
ou spectre de réponse spécifique, du fait de la différence enregistrée en magnitude. Ceci est
principalement du à l'interaction sol - onde sismique. Les principales caractéristiques de ces séismes
sont (Fig.2.6):
Fig. 2.5. Critères de dimensionnement pour 3 niveaux de performance
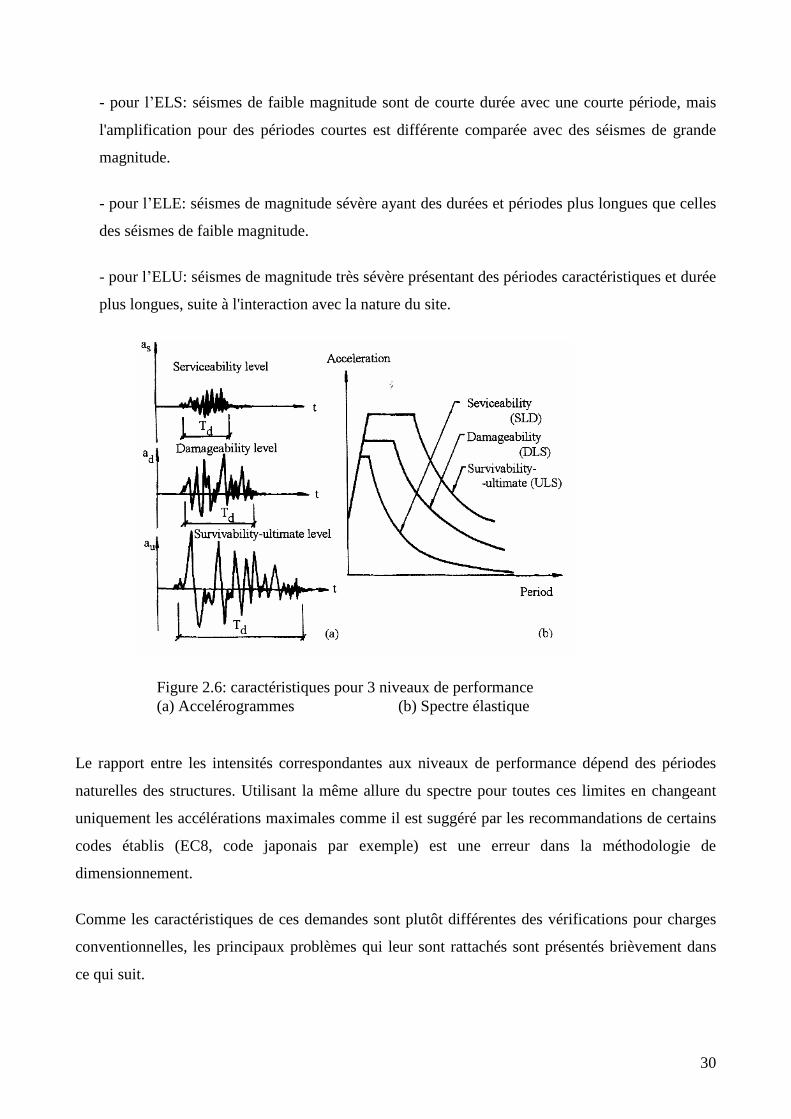
30
- pour l’ELS: séismes de faible magnitude sont de courte durée avec une courte période, mais
l'amplification pour des périodes courtes est différente comparée avec des séismes de grande
magnitude.
- pourl’ELE: séismes de magnitude sévère ayant des durées et périodes plus longues que celles
des séismes de faible magnitude.
- pourl’ELU: séismes de magnitude très sévère présentant des périodes caractéristiques et durée
plus longues, suite à l'interaction avec la nature du site.
Le rapport entre les intensités correspondantes aux niveaux de performance dépend des périodes
naturelles des structures. Utilisant la même allure du spectre pour toutes ces limites en changeant
uniquement les accélérations maximales comme il est suggéré par les recommandations de certains
codes établis (EC8, code japonais par exemple) est une erreur dans la méthodologie de
dimensionnement.
Comme les caractéristiques de ces demandes sont plutôt différentes des vérifications pour charges
conventionnelles, les principaux problèmes qui leur sont rattachés sont présentés brièvement dans
ce qui suit.
Figure 2.6: caractéristiques pour 3 niveaux de performance(a) Accelérogrammes (b) Spectre élastique
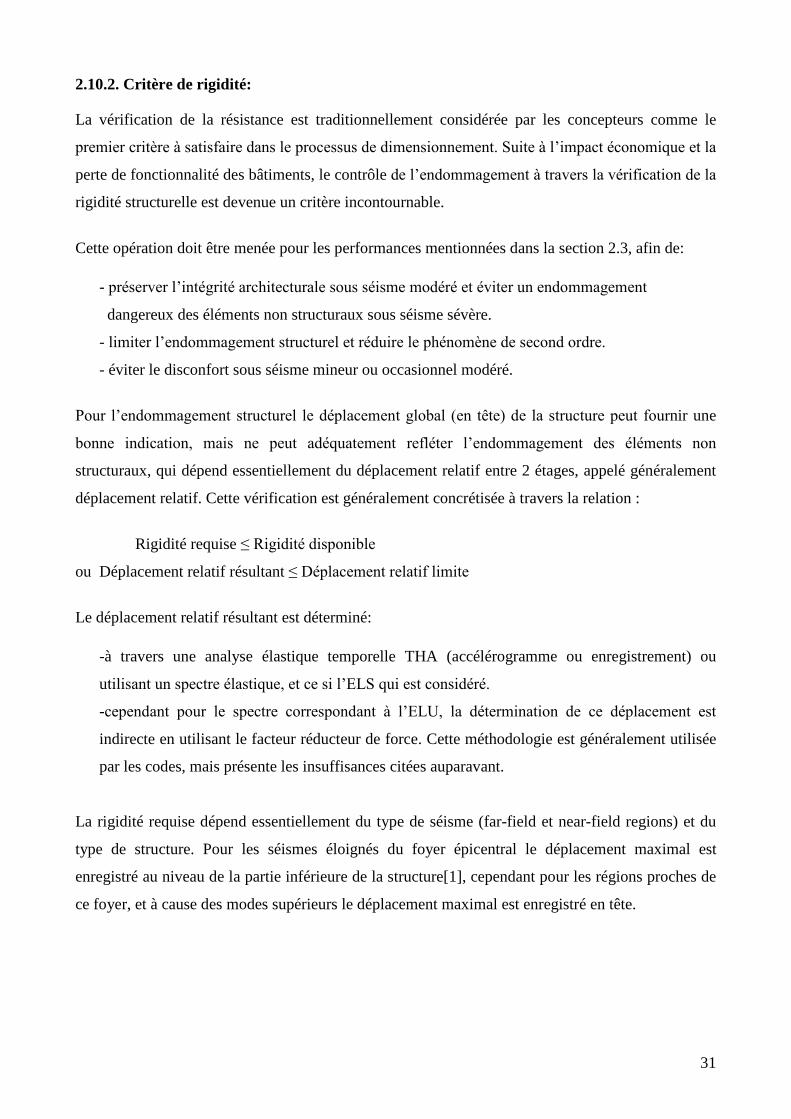
31
2.10.2. Critère de rigidité:
La vérification de la résistance est traditionnellement considérée par les concepteurs comme le
premier critère à satisfaire dans le processus de dimensionnement. Suite à l’impact économique et la
perte de fonctionnalité des bâtiments, le contrôle de l’endommagement à travers la vérification de la
rigidité structurelle est devenue un critère incontournable.
Cette opération doit être menée pour les performances mentionnées dans la section 2.3, afin de:
-préserver l’intégrité architecturale sous séisme modéré et éviter un endommagement
dangereux des éléments non structuraux sous séisme sévère.
-limiter l’endommagement structurel et réduire le phénomène de second ordre.
- éviter le disconfort sous séisme mineur ou occasionnel modéré.
Pour l’endommagement structurel le déplacement global (en tête) de la structure peut fournir une
bonne indication, mais ne peut adéquatement refléter l’endommagement des éléments non
structuraux, qui dépend essentiellement du déplacement relatif entre 2 étages, appelé généralement
déplacement relatif. Cette vérification est généralement concrétisée à travers la relation :
Rigidité requise≤ Rigidité disponible
ou Déplacement relatif résultant≤ Déplacement relatif limite
Le déplacement relatif résultant est déterminé:
-à travers une analyse élastique temporelle THA (accélérogramme ou enregistrement) ou
utilisant un spectre élastique, et ce si l’ELS qui est considéré.
-cependant pour le spectre correspondant à l’ELU, la détermination de ce déplacement est
indirecte en utilisant le facteur réducteur de force. Cette méthodologie est généralement utilisée
par les codes, mais présente les insuffisances citées auparavant.
La rigidité requise dépend essentiellement du type de séisme (far-field et near-field regions) et du
type de structure. Pour les séismes éloignés du foyer épicentral le déplacement maximal est
enregistré au niveau de la partie inférieure de la structure[1], cependant pour les régions proches de
ce foyer, et à cause des modes supérieurs le déplacement maximal est enregistré en tête.
32
La rigidité disponible (emmagasinée) dépend :
a- des déformations limites des éléments non structuraux (Fig.2.7).
- un endommagement mineur où les fissures 0.2-1mm n’affecte significativement pas le service et
la réparation est facilement exécutable.
- un endommagement important où les fissures 1-2mm, n’affectepas la sécurité des éléments
mais la réparation devient coûteuse.
- un endommagement très important avec de larges fissures dépassant les 2mm, conduisant à la
ruine partielle ou totale des éléments.
b- désolidarisation des éléments non structuraux de la structure porteuse
La conception parasismique moderne est favorable au fait de désolidariser les remplissages afin de
les isoler vis-à-vis des déformations structurelles. Si cette précaution est observée, les limites
inhérentes aux éléments non structuraux ne seront pas mandataires dans l’établissement du critère
de rigidité structurelle, et c’est le déplacement relatif d’étage limite qui sera déterminant dans ce
cas.
2.10.3. Critère de résistance
La conception parasismique courante autorise l’endommagement structurel lors d’un séisme sévère
ou les structures sont appelées à enregistrer d’importantes déformations inélastiques. La force de
Figure 2.7. Valeur du déplacement relatif d'étage pour différents états limites
33
dimensionnement est nettement inférieure à la force nécessaire pour que la structure reste dans le
domaine élastique. Le critère de résistance est traditionnellement introduit comme un but primordial
dans le dimensionnement parasismique; la structure doit donc satisfaire ce critère à travers la
relation suivante
Demande de Résistance≤ Capacité de Résistance
Les 2 termes de l’équation sont déterminés respectivement à partir de l’action sismique et la
configuration structurelle. La demande de résistance peut être déterminée en utilisant l’une des
méthodes présentées dans la section 2.7, et elle dépend du :
- type de séisme, se référant à son intensité, durée, période etc. La différence entre séisme proche
et séisme éloigné (near-field et far-field) doit être considérée.
- type de structure
- spectre de dimensionnement, tiré du spectre élastique en utilisant le facteur de réduction de force
R (selon le code RPA, facteur de comportement) qui est déterminé fonction du type de structure,
sa période naturelle et la surésistance.
La capacité de résistance dépend des caractéristiques des zones dissipatives d'énergie, où une
résistance adéquate est fournie tout en évitant la rupture brutale ou autres modes de rupture. La
résistance de ces zones dépend des facteurs suivants:
- la sécurité prise sur les matériaux en considérant les limites inférieures, conduisant ainsi à une
augmentation de la résistance des sections.
- l'utilisation des sections plus importantes que celles résultantes de l'analyse.
- l'effet d'écrouissage produisant une augmentation des moments plastiques
- redistribution des moments suite à la formation des rotules plastiques, le moment de calcul peut
diminuer ou augmenter.
- l'accumulation des déformations plastiques: la capacité de résistance de la structure dépend du
nombre de cycles inélastiques, les séquences et leurs amplitudes relatives.
La combinaison de ces effets peut conduire à une augmentation possible de résistance variant entre
50 et 150%. Pour ce, la vérification de la résistance de la rotule plastique doit prendre en
considération l'existence d'une importante surésistance.
34
Les étapes nécessaires pour déterminer la capacité de résistance sont comme suit:
- établir un mécanisme favorisant la rotulation au niveau des poutres reconnu comme le mécanisme
le moins exigeant si la notion de ductilité est considérée en respectant l'approche poteau fort -
poutre faible.
- identifier les sections critiques ou dissipatives d'énergie, leur fournir le ferraillage nécessaire de
résistance et de confinement afin de leur conférer l'aptitude ductile requise.
- dimensionner les régions préalablement conçues comme élastiques de façon à éviter la migration
accidentelle des déformations plastiques.
210.4. Critère de ductilité:
On entend par ductilité dans la conception structurelle, la capacité d'une structure de supporter de
larges déformations dans le domaine post-élastique sans jamais enregistrer une réduction
substantielle de résistance. L’approche rationnelle utilisée pour déterminer la résistance sismique
d’une structure en portiques consiste à choisir le mécanisme de déformation post-élastique le plus
approprié. Pour atteindre ce but, plusieurs règlements exigent à ce que ces structures aient la
capacité de résistance garantissant le niveau de demande de ductilité résultant.
Pour les portiques autostables, la plastification préférée est celle causée par un comportement
flexionnel que celles causées par l’action de l’effort tranchant ou d’adhérence qui sont à éviter, vu
qu’elles conduisent à une réduction substantielle de la dissipation d’énergie[14]. Les régions
critiques du système structurel résistant aux forces sismique peuvent être ainsi préalablement
choisies, convenablement conçues et soigneusement ferraillées afin de fournir une capacité de
résistance et de ductilité adéquates.
Les récents développements dans la conception parasismique incluent le fait de doter la structure
d'une ductilité suffisante comme il est recommandé pour la rigidité et la résistance. Pour ce, une
méthodologie claire et cohérente pour le contrôle direct de ductilité doit être développée. Cet
objectif est atteint si le critère de ductilité est satisfait:
Demande de Ductilité≤ Capacité de Ductilité
ou la demande de ductilité est déterminée du comportement global de la structure, et la capacité de
ductilité à partir des déformations locales.
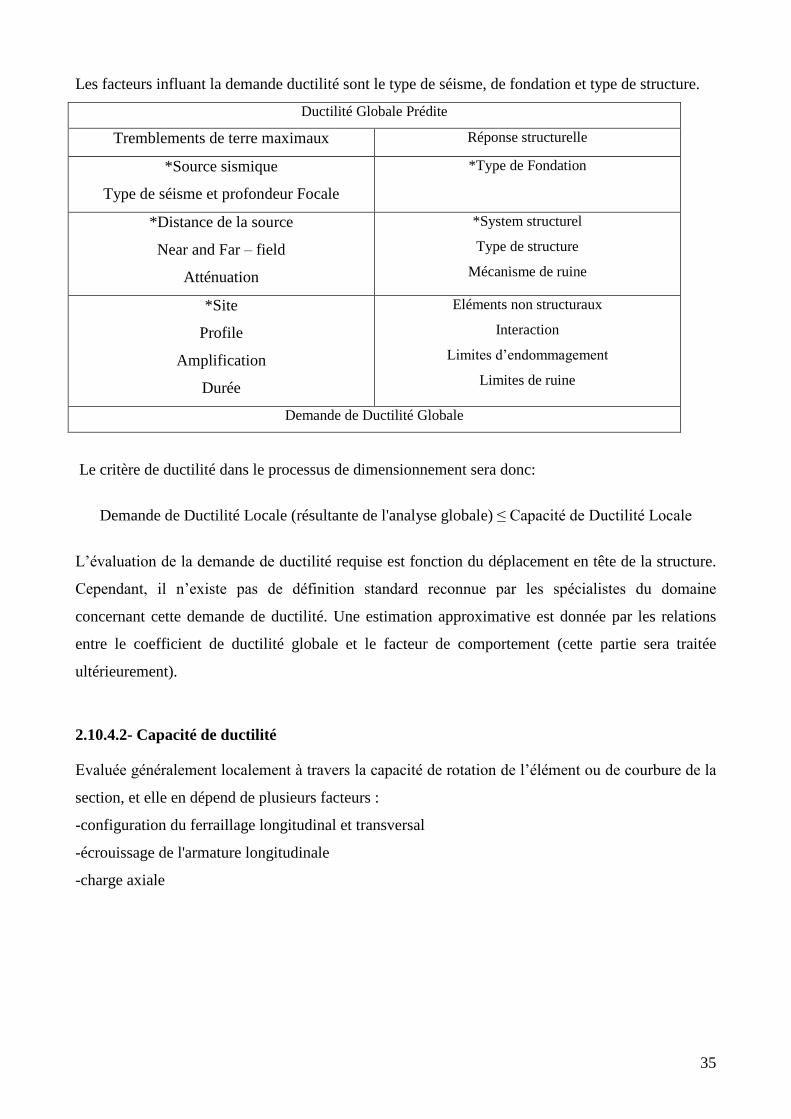
35
Les facteurs influant la demande ductilité sont le type de séisme, de fondation et type de structure.
Ductilité Globale Prédite
Tremblements de terre maximaux Réponse structurelle
*Source sismique
Type de séisme et profondeur Focale
*Type de Fondation
*Distance de la source
Near and Far–field
Atténuation
*System structurel
Type de structure
Mécanisme de ruine
*Site
Profile
Amplification
Durée
Eléments non structuraux
Interaction
Limites d’endommagement
Limites de ruine
Demande de Ductilité Globale
Le critère de ductilité dans le processus de dimensionnement sera donc:
Demande de Ductilité Locale (résultante de l'analyse globale)≤ Capacité de Ductilité Locale
L’évaluation de la demande de ductilité requise est fonction du déplacement en tête de la structure.
Cependant, il n’existe pas de définition standard reconnue par les spécialistes du domaine
concernant cette demande de ductilité. Une estimation approximative est donnée par les relations
entre le coefficient de ductilité globale et le facteur de comportement (cette partie sera traitée
ultérieurement).
2.10.4.2- Capacité de ductilité
Evaluée généralement localement à travers la capacité de rotation de l’élément ou de courbure de la
section, et elle en dépend de plusieurs facteurs :
-configuration du ferraillage longitudinal et transversal
-écrouissage de l'armature longitudinale
-charge axiale
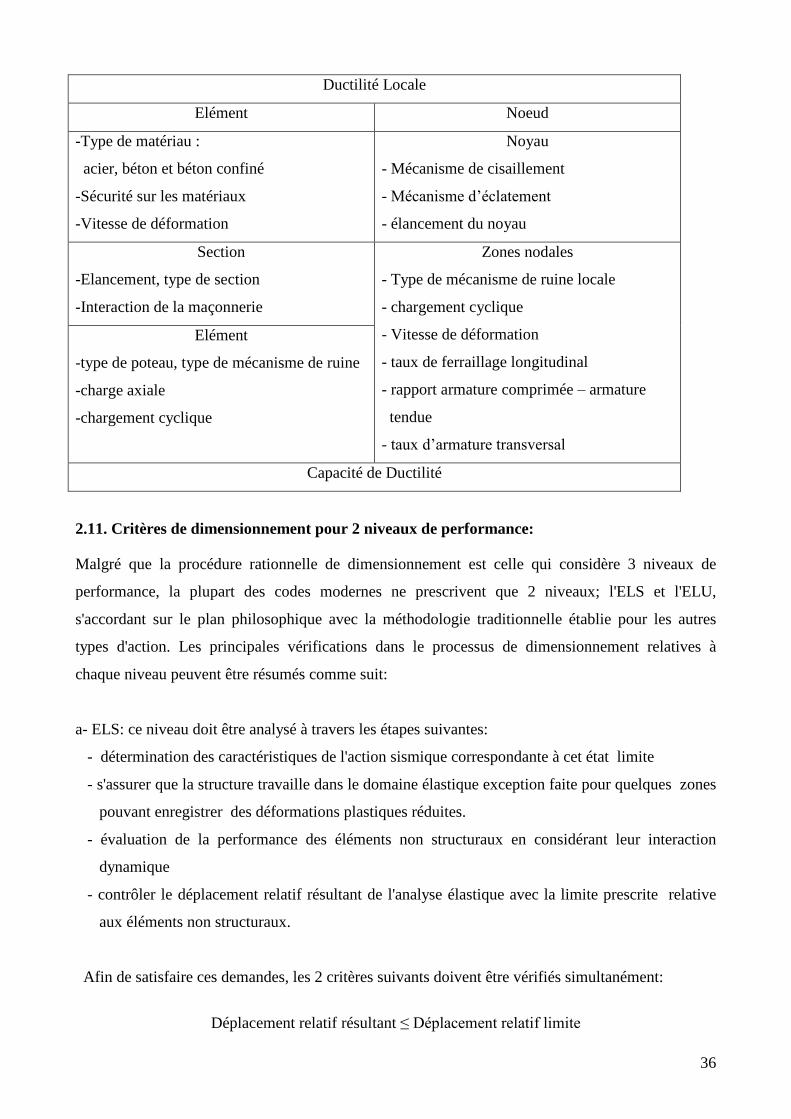
36
Ductilité Locale
Elément Noeud
-Type de matériau :
acier, béton et béton confiné
-Sécurité sur les matériaux
-Vitesse de déformation
Noyau
- Mécanisme de cisaillement
- Mécanisme d’éclatement
- élancement du noyau
Section
-Elancement, type de section
-Interaction de la maçonnerie
Elément
-type de poteau, type de mécanisme de ruine
-charge axiale
-chargement cyclique
Zones nodales
- Type de mécanisme de ruine locale
- chargement cyclique
- Vitesse de déformation
- taux de ferraillage longitudinal
- rapport armature comprimée–armature
tendue
- taux d’armature transversal
Capacité de Ductilité
2.11. Critères de dimensionnement pour 2 niveaux de performance:
Malgré que la procédure rationnelle de dimensionnement est celle qui considère 3 niveaux de
performance, la plupart des codes modernes ne prescrivent que 2 niveaux; l'ELS et l'ELU,
s'accordant sur le plan philosophique avec la méthodologie traditionnelle établie pour les autres
types d'action. Les principales vérifications dans le processus de dimensionnement relatives à
chaque niveau peuvent être résumés comme suit:
a- ELS: ce niveau doit être analysé à travers les étapes suivantes:
- détermination des caractéristiques de l'action sismique correspondante à cet état limite
- s'assurer que la structure travaille dans le domaine élastique exception faite pour quelques zones
pouvant enregistrer des déformations plastiques réduites.
- évaluation de la performance des éléments non structuraux en considérant leur interaction
dynamique
- contrôler le déplacement relatif résultant de l'analyse élastique avec la limite prescrite relative
aux éléments non structuraux.
Afin de satisfaire ces demandes, les 2 critères suivants doivent être vérifiés simultanément:
Déplacement relatif résultant≤ Déplacement relatif limite

37
Résistance requise≤ Résistance Elastique Limite
b- ELU: ce niveau doit être analysé à travers les étapes suivantes:
- détermination des caractéristiques de l'action sismique correspondante à l'état limite ultime
- configurer la structure conditionnant la rotulation des poutres
- analyse de la structure dans le domaine postélastique, en utilisant les méthodes appropriées en se
référant à la résistance et à la ductilité.
- identifier les sections critiques ou dissipatives d'énergie, leur fournir le ferraillage nécessaire de
résistance et de confinement afin de leur conférer l'aptitude ductile requise.
- dimensionner les régions préalablement conçues comme élastiques de façon à éviter la migration
accidentelle des déformations plastiques.
Afin de satisfaire ces demandes, les 2 critères suivants doivent être simultanément vérifiés:
Résistance Requise≤ Capacité de Résistance
Demande de Ductilité≤ Capacité de Ductilité

38
Notions sur les spectres
2.12 Spectre de réponse pour SDOF:
L'approche commune dans le dimensionnement parasismique courant est de caractériser les effets
sismiques à travers des spectres de réponse, c'est à dire à définir le chargement sismique par une
représentation non plus dans le domaine du temps (accélérogramme), mais dans le domaine des
fréquences. Depuis son introduction par Housner dans les années cinquante, le spectre de réponse est
devenu un outil indispensable dans le dimensionnement parasismique, adapté par la suite pour
l’analyse et le dimensionnement structurel inélastique nonlinéaire. Il a été par ailleurs reconnu que le
comportement inélastique structurel réduit la demande de résistance d’une structure de ce qu’elle
devrait être si le comportement est purement élastique. Ceci est pris en considération dans les clauses
réglementaires à travers un coefficient réducteur de force dépendant du niveau de ductilité de la
réponse. Actuellement, le spectre de réponse forme la base dans le processus d'évaluation des forces
sismiques dans la majorité des codes parasismiques.
Il existe différentes approches pour le calcul de ce spectre, fonction de la manière que ses
caractéristiques sont modélisées et la nature de l’exploitation des résultats. Les spectres de réponse
sont généralement divisés en deux catégories; élastique et inélastique et c’est cette dernière catégorie
qui est adoptée par les codes parasismiques. Le spectre de réponse élastique reste indispensable
même pour un dimensionnement inélastique où un système élastiquement équivalent SDOF peut être
utilisé pour modéliser la réponse structurelle inélastique nonlinéaire d’un système MDOF.
Les spectres de réponse sont utilisés dans le contexte de dimensionnement en force largement utilisé,
ou en déplacement qui gagne du terrain du fait de la conception en performance qui est entrain de
s’implanter progressivement dans les codes actuels.
2.12.1 Spectre de réponse élastique:
La réponse élastique d'un système à un seul degré de liberté (SDOF) est déterminée après avoir
digitaliser l'accélérogramme (naturel ou artificiel) d'un séisme donné en assumant des valeurs
numériques pour la période et l'amortissement. Le mouvement dynamique est appliqué à la base du
modèle (console; structure encastrée dans le sol) et l'histoire complète de la réponse de ce système
élastique peut être calculée. Les valeurs maximales des accélérations, vitesses et déplacements sont
alors déterminées. En répétant cette procédure pour un grand nombre de systèmes SDOF pour une
valeur spécifique de l'amortissement, le graphe du spectre de réponse est obtenu. Pour cause d'effet
de résonance, le spectre a la tendance d'amplifier l'action sismique pour une certaine gamme de
périodes.
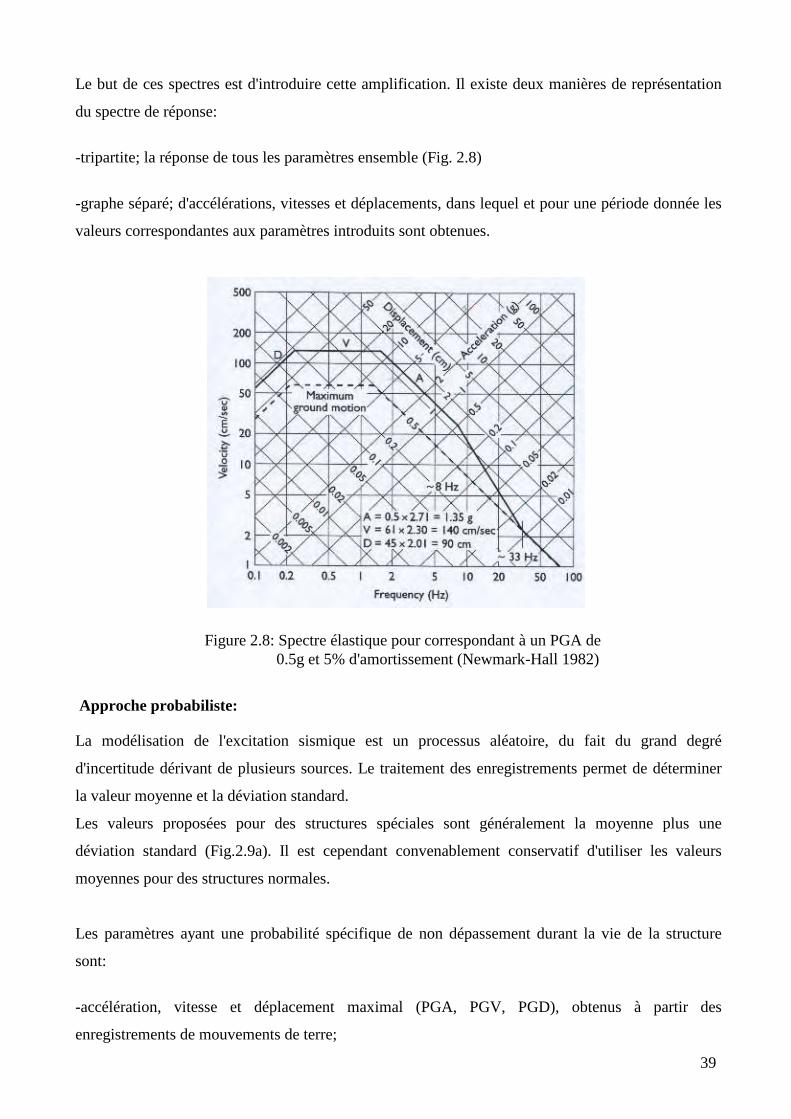
39
Le but de ces spectres est d'introduire cette amplification. Il existe deux manières de représentation
du spectre de réponse:
-tripartite; la réponse de tous les paramètres ensemble (Fig. 2.8)
-graphe séparé; d'accélérations, vitesses et déplacements, dans lequel et pour une période donnée les
valeurs correspondantes aux paramètres introduits sont obtenues.
Approche probabiliste:
La modélisation de l'excitation sismique est un processus aléatoire, du fait du grand degré
d'incertitude dérivant de plusieurs sources. Le traitement des enregistrements permet de déterminer
la valeur moyenne et la déviation standard.
Les valeurs proposées pour des structures spéciales sont généralement la moyenne plus une
déviation standard (Fig.2.9a). Il est cependant convenablement conservatif d'utiliser les valeurs
moyennes pour des structures normales.
Les paramètres ayant une probabilité spécifique de non dépassement durant la vie de la structure
sont:
-accélération, vitesse et déplacement maximal (PGA, PGV, PGD), obtenus à partir des
enregistrements de mouvements de terre;
Figure 2.8: Spectre élastique pour correspondant à un PGA de0.5g et 5% d'amortissement (Newmark-Hall 1982)

40
-accélération effective maximale ou vitesse effective maximale (EPA, EPV), qui a tendance à
compenser l'insuffisance d'un seul actuel max pour décrire le potentiel du mouvement tellurique.
L'EPA est la moyenne des ordonnées max du spectre de réponse élastique d'accélérations entre
l'intervalle 0.1 et 0.5s, divisée par la valeur moyenne de 2.5 (pour un amortissement de 5%). L'EPV
est la moyenne des ordonnées max du spectre de réponse élastique des vitesses entre l'intervalle 0.8
et 1.2s, divisée par la même valeur moyenne de 2.5.
Cette valeur moyenne désigne le facteur d’amplification et varie entre 2 et 3.5, cependant les codes
adoptent généralement la valeur de 2.5. Ce coefficient d’amplification n’est autre que le rapport de
la réponse d’accélération spectrale max (RSA) sur l’accélération pic du sol (PGA); et il dépend
Figure 2.9. Spectre lissé
(a)valeurs de PGA et EPA (b) distribution de la période caractéristique
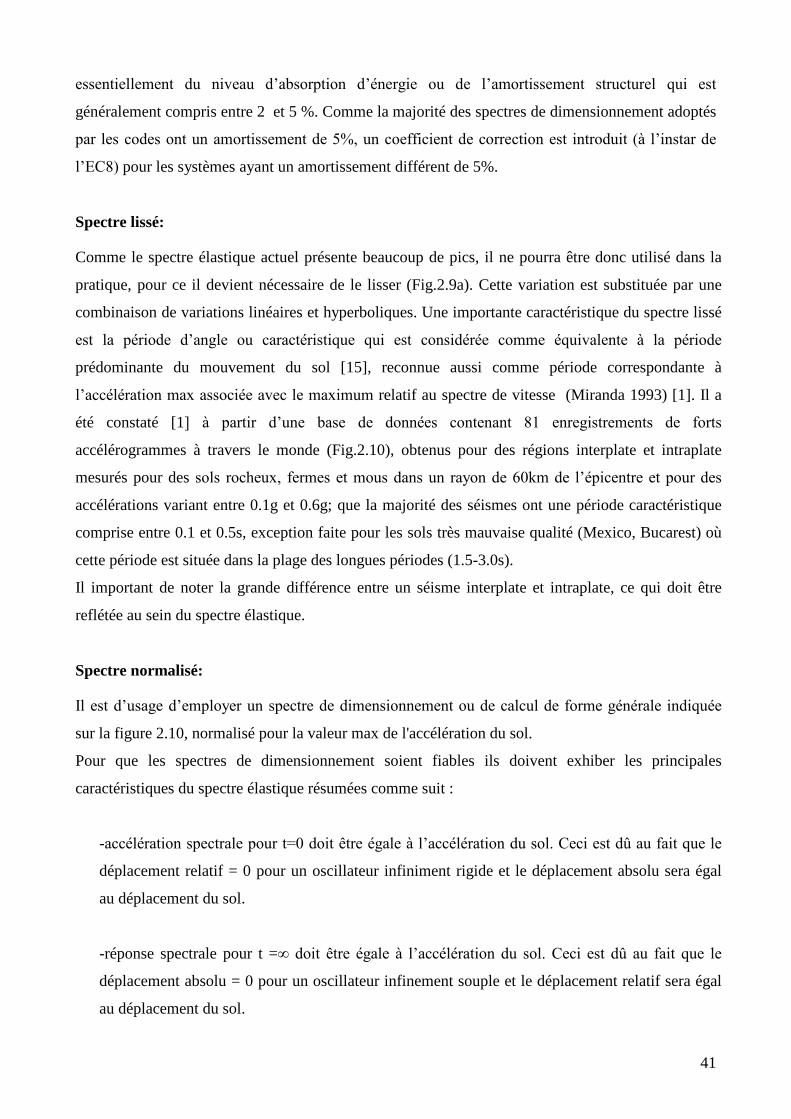
41
essentiellement du niveau d’absorption d’énergie ou de l’amortissement structurel qui est
généralement compris entre 2 et 5 %. Comme la majorité des spectres de dimensionnement adoptés
par les codes ont un amortissement de 5%, un coefficient de correction est introduit (à l’instar de
l’EC8)pour les systèmes ayant un amortissement différent de 5%.
Spectre lissé:
Comme le spectre élastique actuel présente beaucoup de pics, il ne pourra être donc utilisé dans la
pratique, pour ce il devient nécessaire de le lisser (Fig.2.9a). Cette variation est substituée par une
combinaison de variations linéaires et hyperboliques. Une importante caractéristique du spectre lissé
est la période d’angle ou caractéristique qui est considérée comme équivalente à la période
prédominante du mouvement du sol [15], reconnue aussi comme période correspondante à
l’accélération max associée avec le maximum relatif au spectre de vitesse (Miranda 1993) [1]. Il a
été constaté [1] à partir d’une base de données contenant 81 enregistrements de forts
accélérogrammes à travers le monde (Fig.2.10), obtenus pour des régions interplate et intraplate
mesurés pour des sols rocheux, fermes et mous dans un rayon de 60km de l’épicentre et pour des
accélérations variant entre 0.1g et 0.6g; que la majorité des séismes ont une période caractéristique
comprise entre 0.1 et 0.5s, exception faite pour les sols très mauvaise qualité (Mexico, Bucarest) où
cette période est située dans la plage des longues périodes (1.5-3.0s).
Il important de noter la grande différence entre un séisme interplate et intraplate, ce qui doit être
reflétée au sein du spectre élastique.
Spectre normalisé:
Il est d’usage d’employer un spectre de dimensionnement ou de calcul de forme générale indiquée
sur la figure 2.10, normalisé pour la valeur max de l'accélération du sol.
Pour que les spectres de dimensionnement soient fiables ils doivent exhiber les principales
caractéristiques du spectre élastique résumées comme suit :
-accélération spectrale pour t=0 doit être égale à l’accélération du sol. Ceci est dû au fait que le
déplacement relatif = 0 pour un oscillateur infiniment rigide et le déplacement absolu sera égal
au déplacement du sol.
-réponse spectrale pour t =∞ doit être égale à l’accélération du sol. Ceci est dû au fait que le
déplacement absolu = 0 pour un oscillateur infinement souple et le déplacement relatif sera égal
au déplacement du sol.
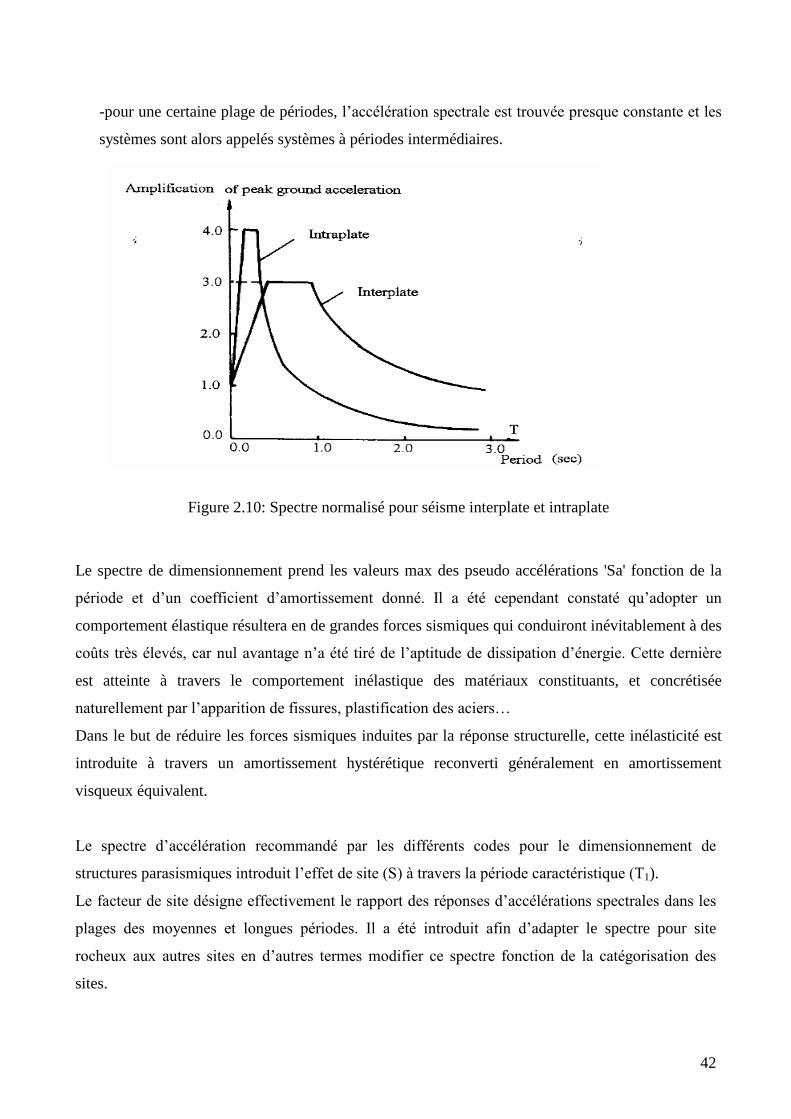
42
-pour une certaine plage de périodes,l’accélération spectrale est trouvée presque constante et les
systèmes sont alors appelés systèmes à périodes intermédiaires.
Le spectre de dimensionnement prend les valeurs max des pseudo accélérations 'Sa' fonction de la
période et d’un coefficient d’amortissement donné. Il a été cependant constaté qu’adopter un
comportement élastique résultera en de grandes forces sismiques qui conduiront inévitablement à des
coûts très élevés, car nul avantage n’a été tiré de l’aptitude de dissipation d’énergie. Cette dernière
est atteinte à travers le comportement inélastique des matériaux constituants, et concrétisée
naturellement par l’apparition de fissures, plastification des aciers…
Dans le but de réduire les forces sismiques induites par la réponse structurelle, cette inélasticité est
introduite à travers un amortissement hystérétique reconverti généralement en amortissement
visqueux équivalent.
Le spectre d’accélération recommandé par les différents codes pour le dimensionnement de
structures parasismiques introduit l’effet de site (S) à travers la période caractéristique (T1).
Le facteur de site désigne effectivement le rapport des réponses d’accélérations spectrales dans les
plages des moyennes et longues périodes. Il a été introduit afin d’adapter le spectre pour site
rocheux aux autres sites en d’autres termes modifier ce spectre fonction de la catégorisation des
sites.
Figure 2.10: Spectre normalisé pour séisme interplate et intraplate
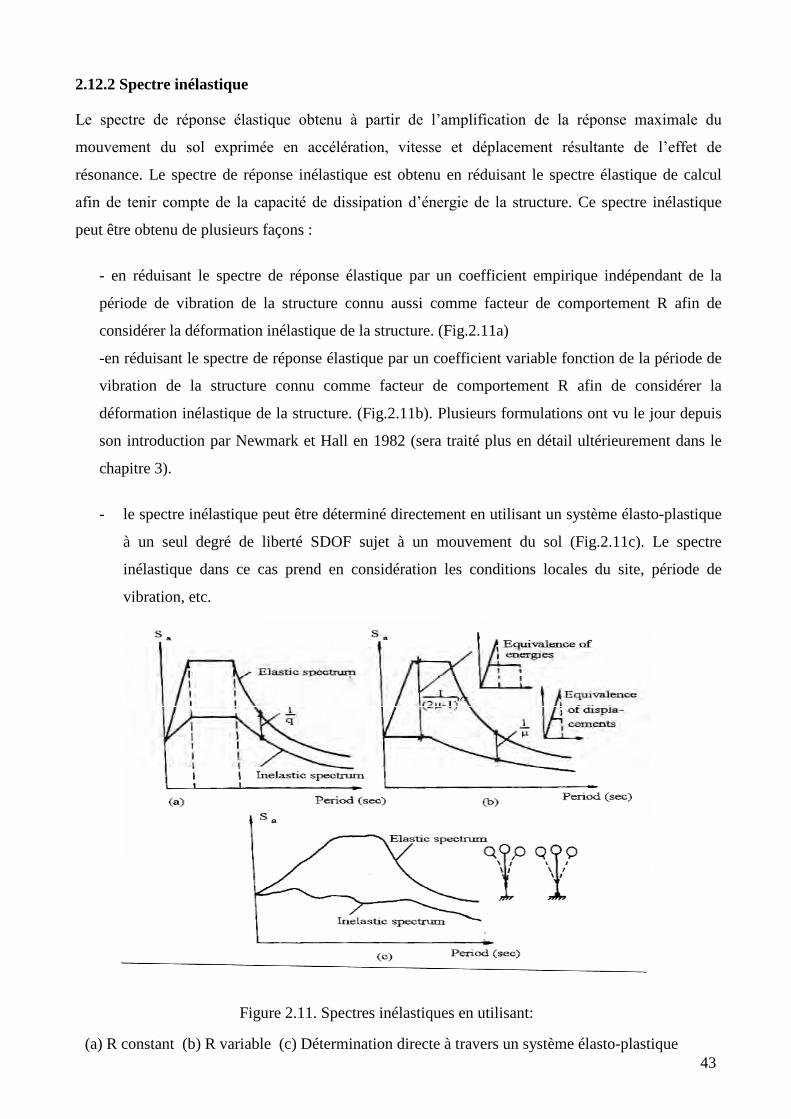
43
2.12.2 Spectre inélastique
Le spectre de réponse élastique obtenu à partir de l’amplification de la réponse maximale du
mouvement du sol exprimée en accélération, vitesse et déplacement résultante de l’effet de
résonance. Le spectre de réponse inélastique est obtenu en réduisant le spectre élastique de calcul
afin de tenir compte de la capacité de dissipation d’énergie de la structure. Ce spectre inélastique
peut être obtenu de plusieurs façons :
- en réduisant le spectre de réponse élastique par un coefficient empirique indépendant de la
période de vibration de la structure connu aussi comme facteur de comportement R afin de
considérer la déformation inélastique de la structure. (Fig.2.11a)
-en réduisant le spectre de réponse élastique par un coefficient variable fonction de la période de
vibration de la structure connu comme facteur de comportement R afin de considérer la
déformation inélastique de la structure. (Fig.2.11b). Plusieurs formulations ont vu le jour depuis
son introduction par Newmark et Hall en 1982 (sera traité plus en détail ultérieurement dans le
chapitre 3).
- le spectre inélastique peut être déterminé directement en utilisant un système élasto-plastique
à un seul degré de liberté SDOF sujet à un mouvement du sol (Fig.2.11c). Le spectre
inélastique dans ce cas prend en considération les conditions locales du site, période de
vibration, etc.
Figure 2.11. Spectres inélastiques en utilisant:
(a) R constant (b) R variable (c) Détermination directe à travers un système élasto-plastique
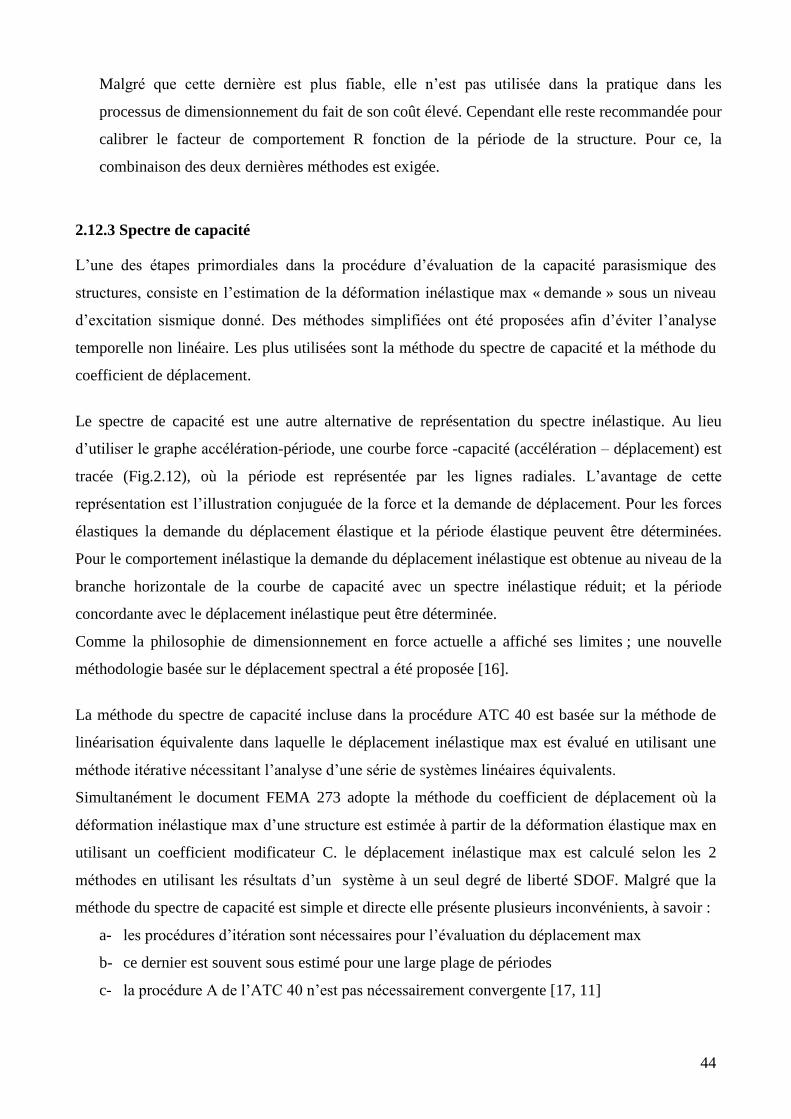
44
Malgré que cette dernière est plus fiable, elle n’est pas utilisée dans la pratique dans les
processus de dimensionnement du fait de son coût élevé. Cependant elle reste recommandée pour
calibrer le facteur de comportement R fonction de la période de la structure. Pour ce, la
combinaison des deux dernières méthodes est exigée.
2.12.3 Spectre de capacité
L’une des étapes primordiales dans la procédure d’évaluation de la capacité parasismique des
structures, consiste en l’estimation de la déformation inélastique max « demande » sous un niveau
d’excitation sismique donné. Des méthodes simplifiées ont été proposées afin d’éviter l’analyse
temporelle non linéaire. Les plus utilisées sont la méthode du spectre de capacité et la méthode du
coefficient de déplacement.
Le spectre de capacité est une autre alternative de représentation du spectre inélastique. Au lieu
d’utiliser le graphe accélération-période, une courbe force -capacité (accélération–déplacement) est
tracée (Fig.2.12), où la période est représentée par les lignes radiales. L’avantage de cette
représentation est l’illustration conjuguée de la force et la demande de déplacement. Pour les forces
élastiques la demande du déplacement élastique et la période élastique peuvent être déterminées.
Pour le comportement inélastique la demande du déplacement inélastique est obtenue au niveau de la
branche horizontale de la courbe de capacité avec un spectre inélastique réduit; et la période
concordante avec le déplacement inélastique peut être déterminée.
Comme la philosophie de dimensionnement en force actuelle a affiché ses limites ; une nouvelle
méthodologie basée sur le déplacement spectral a été proposée [16].
La méthode du spectre de capacité incluse dans la procédure ATC 40 est basée sur la méthode de
linéarisation équivalente dans laquelle le déplacement inélastique max est évalué en utilisant une
méthode itérative nécessitant l’analyse d’une série de systèmes linéaires équivalents.
Simultanément le document FEMA 273 adopte la méthode du coefficient de déplacement où la
déformation inélastique max d’une structure est estimée à partir de la déformation élastique max en
utilisant un coefficient modificateur C. le déplacement inélastique max est calculé selon les 2
méthodes en utilisant les résultats d’un système à un seul degré de liberté SDOF. Malgré que la
méthode du spectre de capacité est simple et directe elle présente plusieurs inconvénients, à savoir :
a- les procédures d’itération sont nécessaires pour l’évaluation du déplacement max
b- ce dernier est souvent sous estimé pour une large plage de périodes
c- la procédure A de l’ATC 40 n’est pas nécessairement convergente [17, 11]
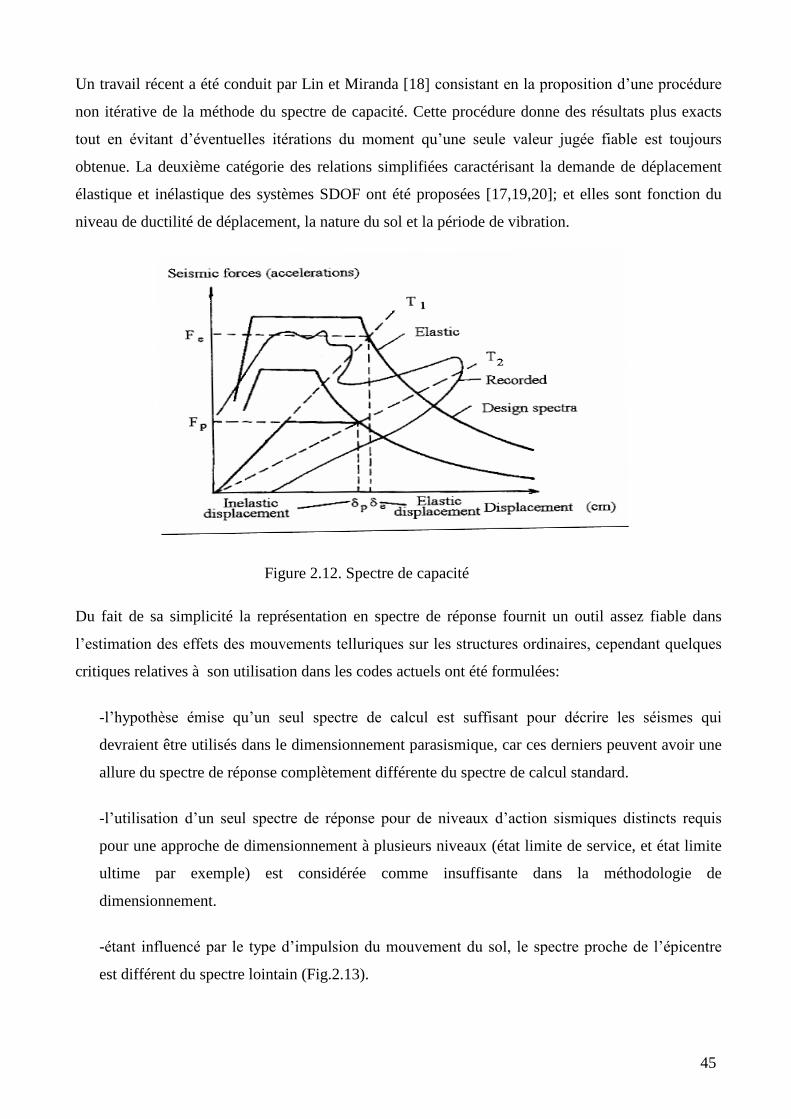
45
Un travail récent a été conduit par Lin et Miranda [18] consistant en la proposition d’une procédure
non itérative de la méthode du spectre de capacité. Cette procédure donne des résultats plus exacts
tout en évitant d’éventuelles itérations du moment qu’une seule valeur jugée fiable est toujours
obtenue. La deuxième catégorie des relations simplifiées caractérisant la demande de déplacement
élastique et inélastique des systèmes SDOF ont été proposées [17,19,20]; et elles sont fonction du
niveau de ductilité de déplacement, la nature du sol et la période de vibration.
Du fait de sa simplicité la représentation en spectre de réponse fournit un outil assez fiable dans
l’estimation des effets des mouvements telluriques sur les structures ordinaires, cependant quelques
critiques relatives à son utilisation dans les codes actuels ont été formulées:
-l’hypothèse émise qu’un seul spectre de calcul est suffisant pour décrire les séismes qui
devraient être utilisés dans le dimensionnement parasismique, car ces derniers peuvent avoir une
allure du spectre de réponse complètement différente du spectre de calcul standard.
-l’utilisation d’un seul spectre de réponse pour de niveaux d’action sismiques distincts requis
pour une approche de dimensionnement à plusieurs niveaux (état limite de service, et état limite
ultime par exemple) est considérée comme insuffisante dans la méthodologie de
dimensionnement.
-étant influencé par le type d’impulsion du mouvement du sol, le spectre proche de l’épicentre
est différent du spectre lointain (Fig.2.13).
Figure 2.12. Spectre de capacité
46
-le spectre vertical proche de la source est très différent de celui généralement considéré comme
une fraction du spectre horizontal; ce dernier sera donc inadéquat pour l’utilisation dans le
processus de dimensionnement.
-l’effet d’amortissement relatif à chaque niveau d’attaque sismique doit être considéré; pour un
état limite de service le coefficient d’amortissement est de 2%, cependant pour l’état ultime une
valeur moyenne de 5% est utilisée.
-la durée du séisme, qui est considérée comme un facteur très important est complètement
ignorée
-l’influence du rapport a/v n’est pas prise en compte.
Malgré toutes ces réserves, l’utilisation du spectre de réponse reste la méthode la plus pratique dans
le dimensionnement usuel.
Figure 2.13: Caractéristiques séisme proche vs séisme lointain
47
2.13 Spectre de réponse pour MDOF:
La méthode du spectre de réponse est basée sur le comportement d’un système linéaire élastique à un
seul degré de liberté SDOF. Du fait de sa simplicité, cette méthode a été élargie aux systèmes
MDOF élastiques nonlinéaires et systèmes inélastiques hystérétiques en utilisant quelques
coefficients d’équivalence(Fig.2.14a). Pour plusieurs types de séismes, le spectre de réponse est
considéré comme une évaluation inadéquate de la demande; c’est le cas où cette demande peut être
spécifiée en terme de période dominante ou premier mode de vibration.
Le système SDOF peut très bien modéliser le déplacement d’une structure MDOF [21], exception
pour le cas des sites très proches de l’épicentre; où l’action sismique est de caractère impulsive
conduisant à une propagation de déplacements à travers la structure sous forme d’ondes causant de
larges déplacements relatifs locaux (Fig.2.14b). Les modes supérieurs de vibration ont un effet
amplificateur nullement reflété si le spectre de réponse pour systèmes SDOF est utilisé.
Une nouvelle approche basée sur le modèle (a continuous shear-beam) proposée par Iwan [21] doit
être adoptée dans ce cas, où le critère de dimensionnement à observer sera le déplacement relatif
d’étage[1]. La comparaison établie par Iwan sur les valeurs du déplacement relatif d’étage données
par le spectre de réponse (response spectra) et le spectre de déplacement (drift spectra) a permis de
constater que le spectre de réponse sous estime la demande de déplacement. La faible différence
enregistrée pour les périodes courtes, est amplifiée si les périodes longues sont considérées
conduisant ainsi à une divergence significative entre les résultats des deux méthodes.
Figure 2.14. Modèles pour systèmes MDOF
(a) Cantilever (b) Shear-beam
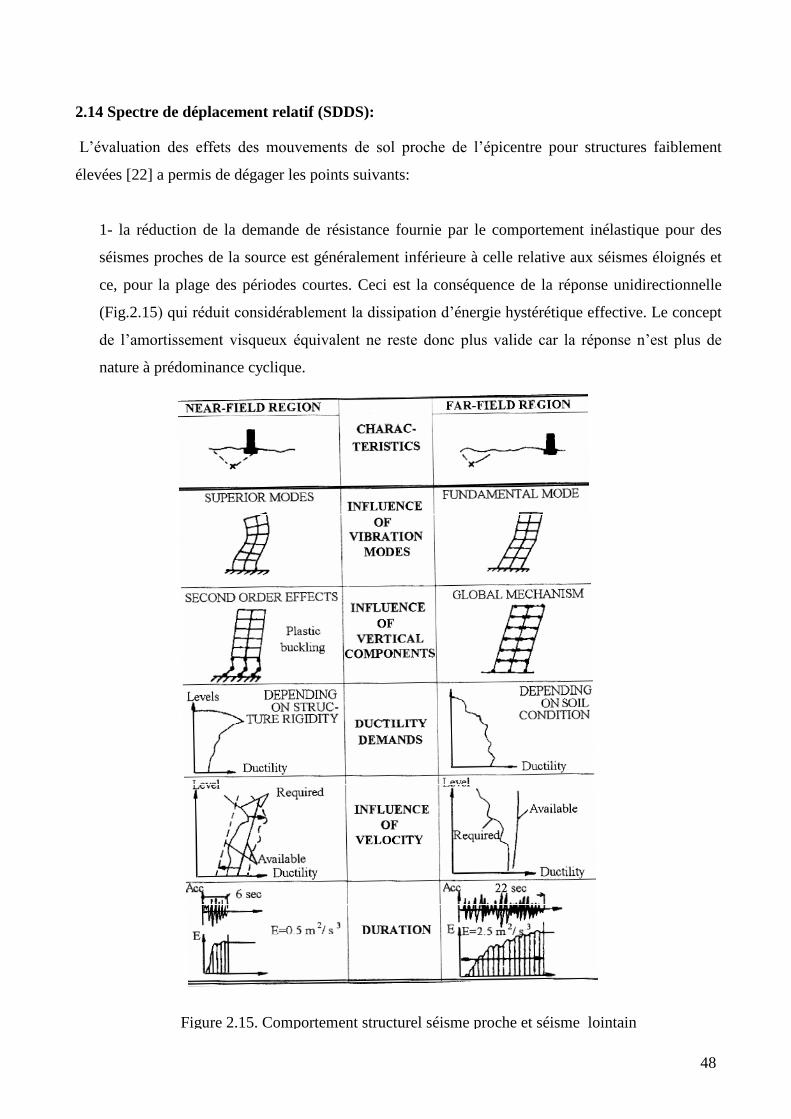
48
2.14 Spectre de déplacement relatif (SDDS):
L’évaluation des effets des mouvements de sol proche de l’épicentre pour structures faiblement
élevées [22] a permis de dégager les points suivants:
1- la réduction de la demande de résistance fournie par le comportement inélastique pour des
séismes proches de la source est généralement inférieure à celle relative aux séismes éloignés et
ce, pour la plage des périodes courtes. Ceci est la conséquence de la réponse unidirectionnelle
(Fig.2.15) qui réduit considérablement la dissipation d’énergie hystérétique effective. Le concept
de l’amortissement visqueux équivalent ne reste donc plus valide car la réponse n’est plus de
nature à prédominance cyclique.
Figure 2.15. Comportement structurel séisme proche et séisme lointain
49
2- les déformations inélastiques ont tendance de se concentrer dans les régions à réponse
hautement ductile à cause de la réduction locale de la vitesse de l’onde dans ces régions. Ceci ne
pourra être pris en compte si une seule méthode d’analyse à un seul mode est envisagée.
L’examen de l’effet du séismeest localement étudié en utilisant le spectre de déplacement relatif.
Ce dernier est similaire au spectre de réponse sauf qu’il est basé sur un modèle linéaire en poutre
continue exhibant un comportement privilégié de cisaillement (linear shear-beam) plutôt que sur le
traditionnel modèle linéaire SDOF. Ce nouveau modèle (continuous shear-beam) est
particulièrement adapté pour l’étude des déformations locales au sein d’une structure. Par analogie à
la représentation par spectre d’accélération déplacement demande (ADRS), le spectre de
déplacement relatif (SDDS) peut aussi prendre la forme de spectre force-déplacement demande.
Iwan recommande la méthode SDDS (shear drift demand spectrum) basée sur le spectre de capacité
de déformation locale (Local drift capacity spectrum method LDCSM). Cette approche est similaire
à la méthode du spectre de capacité (Capacity spectrum method CSM), sauf que la capacité
structurelle sera basée sur l’effort tranchant local et sur le déplacement relatif de niveau au lieu de la
capacité basée sur l’effort tranchant global-déplacement.
La relation effort tranchant de niveau –déplacement relatif de niveau peut être donc déterminée en
utilisant la même procédure nonlinéaire adoptée dans l’approche statique pushover globale.
2.15 Spectre de déplacement d’écoulement (YDS) ou Spectre du point d’écoulement (YPS)
La réponse d’un oscillateur SDOF aux mouvements du sol a été largement étudiée par le passé. Les
publications récentes (ATC-40 et FEMA-273/274) a vulgarisé plusieurs méthodes d’estimation du
déplacement pic de la réponse des systèmes nonlinéaires, connues généralement sous le nom de
Procédures Statiques Non linéaires (Nonlineair Static Procedures; NSP); incluant la méthode du
spectre de capacité (CSM) et la méthode des coefficients de déplacement qui s’articulent sur les
amplitudes de la réponse élastique comme base pour l’estimation du déplacement. Similairement à la
méthode du spectre de capacité, la méthode du spectre d'écoulement (YPS) permet elle aussi
l'estimation du déplacement pic de la réponse. Cependant cette dernière applique directement le
facteur de réduction R associé à un niveau de ductilité constantμ, au lieu de se baser sur les relations
entre la réponse hystérétique et l'amortissement visqueux équivalent. Le facteur R est considéré
comme exact quand il est calculé à partir d'un enregistrement spécifique et approché quand les
relations R- μ-T sont appliquées [23].
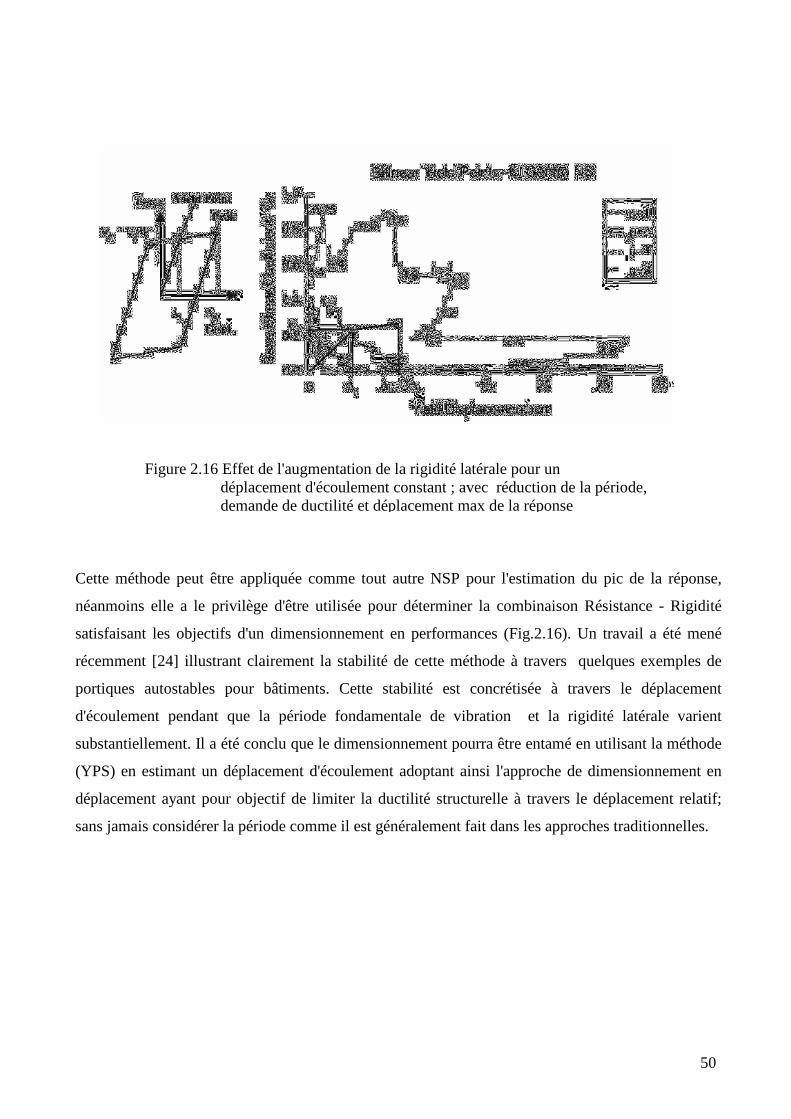
50
Cette méthode peut être appliquée comme tout autre NSP pour l'estimation du pic de la réponse,
néanmoins elle a le privilège d'être utilisée pour déterminer la combinaison Résistance - Rigidité
satisfaisant les objectifs d'un dimensionnement en performances (Fig.2.16). Un travail a été mené
récemment [24] illustrant clairement la stabilité de cette méthode à travers quelques exemples de
portiques autostables pour bâtiments. Cette stabilité est concrétisée à travers le déplacement
d'écoulement pendant que la période fondamentale de vibration et la rigidité latérale varient
substantiellement. Il a été conclu que le dimensionnement pourra être entamé en utilisant la méthode
(YPS) en estimant un déplacement d'écoulement adoptant ainsi l'approche de dimensionnement en
déplacement ayant pour objectif de limiter la ductilité structurelle à travers le déplacement relatif;
sans jamais considérer la période comme il est généralement fait dans les approches traditionnelles.
Figure 2.16 Effet de l'augmentation de la rigidité latérale pour undéplacement d'écoulement constant ; avec réduction de la période,demande de ductilité et déplacement max de la réponse
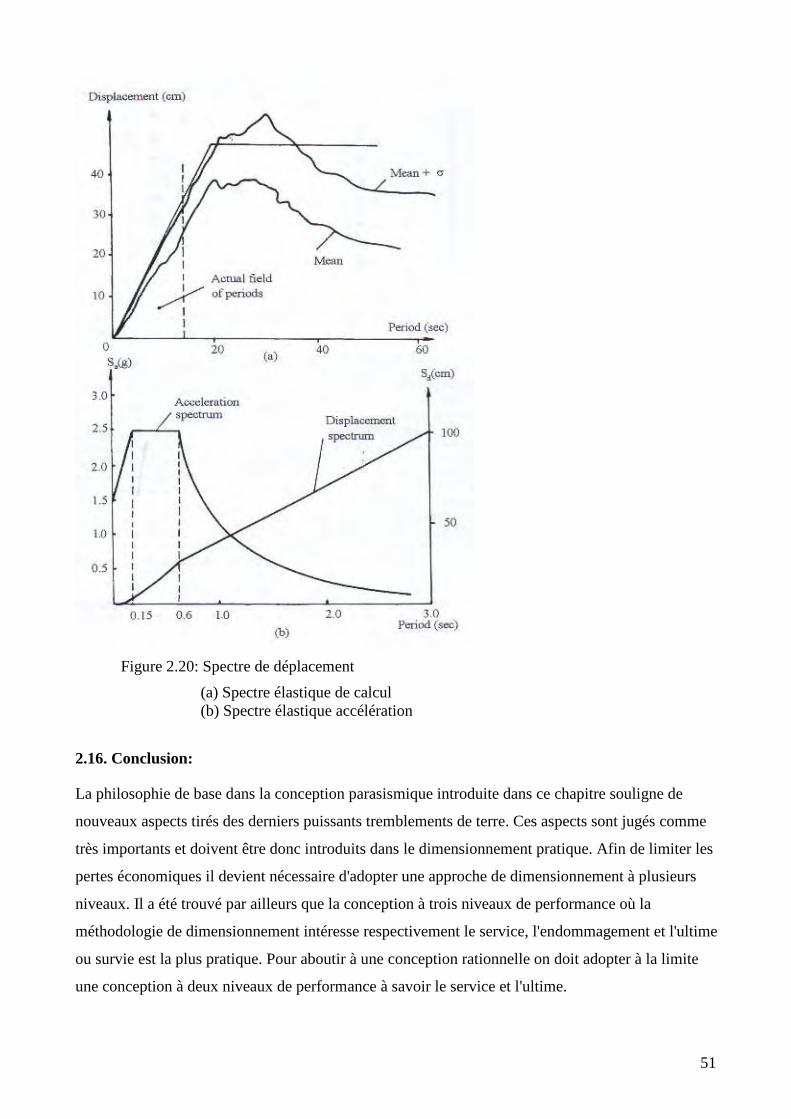
51
2.16. Conclusion:
La philosophie de base dans la conception parasismique introduite dans ce chapitre souligne de
nouveaux aspects tirés des derniers puissants tremblements de terre. Ces aspects sont jugés comme
très importants et doivent être donc introduits dans le dimensionnement pratique. Afin de limiter les
pertes économiques il devient nécessaire d'adopter une approche de dimensionnement à plusieurs
niveaux. Il a été trouvé par ailleurs que la conception à trois niveaux de performance où la
méthodologie de dimensionnement intéresse respectivement le service, l'endommagement et l'ultime
ou survie est la plus pratique. Pour aboutir à une conception rationnelle on doit adopter à la limite
une conception à deux niveaux de performance à savoir le service et l'ultime.
Figure 2.20: Spectre de déplacement
(a) Spectre élastique de calcul(b) Spectre élastique accélération

52
La cohérence dans la stratégie du dimensionnement parasismique exige la vérification de la rigidité
de la structure pour le niveau de service, la résistance pour le niveau d'endommagement et la
ductilité pour le niveau ultime. Vu les différences importantes entre séisme lointain et séisme proche
du foyer épicentral, il devient aussi vital d'introduire l'effet d'impulsion caractérisant le séisme
proche dans le dimensionnement pratique.
Le code RPA99 spécifie inconsidérablement 2 niveaux de performance (art1.2):
- le premier relatif à un séisme modéré, relativement fréquent, exigeant une rigidité et une
résistance suffisante pour limiter les dommages structuraux et non structuraux.
- le second relatif à un séisme majeur, plus rare, exigeant une ductilité et une capacité de
dissipation d'énergie adéquate pour permettre à la structure de subir des déplacements
inélastiques avec dommages limités sans effondrement, ni perte de stabilité.
Cependant son examen révèle qu'il n'adopte principalement qu'une procédure de dimensionnement à
un seul niveau concernant l'état limite ultime (ELU) satisfaisant la "sécurité de la vie"(à l'instar des
codes basés sur la conception en force) car le premier niveau est nullement reflété au sein de ses
clauses réglementaires. Ceci implique que la structure peut être endommagée mais ne doit pas
s'effondrer. En plus de cela la boucle de contrôle sur la capacité de déformation garantissant la
dissipation d'énergie est carrément absente.
Dans le souci d'établir la cohérence nécessaire dans le processus de dimensionnement, il devient
impératif:
*de spécifier des critères de performance pour le niveau de service en recommandant des valeurs
appropriées le déplacement relatif par exemple.
* d'introduire pour le niveau ultime:
1- sur le plan du comportement structurel global
a- une nouvelle formulation pour le facteur de comportement en le reliant avec le niveau de
ductilité qui lui est concordant.
b- s'assurer du rapport des moments des poteaux sur ceux des poutres aboutissant au même
nœud, garantissant certes le mécanisme de rotulation des poutres.
53
2- sur le plan du comportement local:
a- la ductilité de section résultante du niveau de ductilité global établi; en adoptant une nouvelle
formulation du ferraillage transversal fonction de la flexibilité des poteaux, le niveau
d'endommagement et le déplacement relatif de niveau tolérable.
b- adopter une clause réglementaire pour les noyaux des nœuds (inexistante jusqu'à présent)afin
de se prémunir contre l'éventualité d'une ruine prématurée ou une migration accidentelle des
déformations plastiques.
3- réviser la limite sur la période élastique (si ce paramètre demeurera sélectionné comme clivage de
contrôle) fonction du niveau de ductilité de déplacement concordant avec le facteur de
comportement global.
Ce complément réglementaire s'avère nécessaire afin de hisser notre réglementation parasismique en
vigueur pour qu'elle puisse reposer réellement sur une conception à 2 niveaux répondant ainsi au
minimum requis.
Références:
1- V.Gioncu, F.M.Mazzolani, 'Ductility of Seismic Resistant Steel Structures'
Spon Press , Guilford U.K 2002
2- A.Ghobarah, 'Performance based design (PBD) in earthquake engineering: state of
development' Engineering Structures 23 (2001) 878-884
3- Z.A. Lubkowski, X.Duan, 'EN1998 Eurocode: Design of Earthquake Resistance'
Civil Engineering 144 (2001) 55-60
4- S.Otani, 'New Seismic Design Provisions In Japan' The second US-Japan workshop on
Performance Based Design Earthquake Engineering Methodology for reinforced concrete
building structures; Sapporo-Hokkaido, Japan. PEER report 2000/10
5- A.M.Mwafy, A.S.Elnashai, 'Static pushover versus dynamic'. Engineering Structures 23
(2001) 407-424
6- C.Chintanapakdee, A.K.Chopra, 'Evaluation of modal pushover analysis using generic frames'
Earthquake Engineering and Structural Dynamics 32 (2003) 417-442
7- T.S.Jan, M.W.Liu, Y.C.Kao, 'An upper-bound analysis procedure for estimating the seismic
demands of high-rise buildings' Engineering Structures 26 (2004) 117-128
8- RPA 99 'Règles Parasismiques Algériennes' DTR-BC-2.48 CNRAGP
9- A.Chandler, N.Lam, J.Wilson, G.Hutchinson, 'Review of modern concepts in the engineering
interpretation of earthquake response spectra’ Structures & Buildings, 146 Feb.2001, 75-84.

54
10- P.Fajfar ‘Structural analysis in earthquake engineering- A breakthrough of simplified NON-
linear methods’12th European Conference on Earthquake Engineering; 2002.paper ref.843.
11- P.Fajfar ‘Capacity spectrum method based on inelastic demand spectra’Earthquake
Engineering and Structural Dynamics 28 (1999) 979-993.
12- A.K.Chopra, R.K.Goel ‘Direct displacement-based design: use of inelastic vs. elastic design
spectra’Earthquake Spectra 17 (2001) 47-64.
13- A.J.Kappos, A.Manafpour, 'Seismic design of R/C buildings with the aid of advanced
analytical techniques'. Engineering Structures 23 (2001) 319-332
14- R.Park, ‘Capacity Design of Ductile of RC Building Structures for Earthquake Resistance’,
The Structural Engineer, Aug.1992.
15- N.Lam, J.Wilson, G.Hutchinson, 'The ductility reduction factor in the seismic design of
buildings' Earthquake Engineering and Structural Dynamics volume 27, 749-769 1998.
16- M.S.Medthekar, D.J.L.Kennedy 'Displacement-based seismic design of buildings–theory
Engineering Structures 22, 201-209 2000
17- A.K.Chopra, R.K.Goel ‘Capacity-Demand-Diagram methods for estimating seismic
deformation of inelastic structures: SDF systems’Report N°.PEER-1999/02.
University of Berkeley April 1999.
18- Y.Y.Lin, E.Miranda, ‘Non-Iterative capacity spectrum method based on equivalent
linearization for estimating inelastic deformation demands of buildings’ Structural
Engineering Earthquake Engineering. JSCE Vol. 21 (2); Oct.2004, 113-119.
19- E.Miranda, J.Ruiz-Garcia ‘Evaluation of approximate methods to estimate maximum inelastic
displacement demands’Earthquake Engineering and Structural Dyn. 31(3); (2002) 539-560.
20- L.D.Decanini, L.Liberatore, F.Mollaioli ‘ Characterization of displacement demand for elastic
and inealastic SDOF systems’ Soil Dynamics and Earthquake Engineering 23 (2003) 455-471.
21- W.D.Iwan 'Drift spectrum: Measure of demand for earthquake ground motions' Journal of
Structural Engineering April 1997 Vol.123 N°4 397-404.
22- W.D.Iwan 'Evaluation of the effects of Near-source ground motions' PG&E-PEER Directed
studies program 2001
23- B.Alavi and H.Krawinkler 'Design considerations for Near-fault ground motions'
US-Japan workshop on the Effects of Near-Field Earthquake Shaking; San Francisco,
California. PEER report 2000/02
24- M.A.Aschheim and E.F.Black ' The primacy of the yield displacement in seismic design'
The second US-Japan workshop on Performance Based Design Earthquake Engineering
Methodology for reinforced concrete building structures; Sapporo-Hokkaido, Japan. PEER
report 2000/10

55
18 AK.Chopra, RK.Goel ‘A modal pushover analysis procedure for estimating seismic demands
for buildings’Earthquake Engineering and Structural Dynamics 31 (2002) 561-582

55
Introduction:
Le code algérien en vigueur établi pour la conception et le dimensionnement des structures
parasismiques suppose une réponse nonlinéaire pour les éléments constituants de telles
structures. Cependant aucune suiten’est attribuée à la prédiction de la réponse inélastique du
bâtiment (endommagement structurel), car le dimensionnement s’articule sur des procédures
basées sur la force élastique plutôt que sur celles utilisant le déplacement. Cependant il est
communément reconnu que ce sont les déplacements de niveau et les déformations des
éléments constituants les structures pouvant développer des mécanismes de rotules plastiques
(rotulables) qui fournissent une estimation sur l’endommagement structurel. Malgré
l’évolution de la réglementation parasismique de part le monde, les procédures d’analyses
élastiques restent la pierre angulaire dans la pratique du dimensionnement parasismique en
Algérie. L’objectif de ce chapitre est d’intégrer la connaissance existante se rattachant à la
réponse parasismique des bâtiments pouvant exhiber un mécanisme de rotules plastiques.
L’analyse basée sur la force latérale statique a été utilisée pour plus de 70 ans [1], malgré
qu’elle ne donne pas d’estimations quantitatives de la réponse nonlinéaire, elle a été
considérée comme une procédure d’analyse valable et un outil pratique dans le
dimensionnement professionnel pour plusieurs raisons:
1- d’utilisation facile n’exigeant pas du concepteur des connaissances sur la dynamique des
structures.
2- peut fournir une estimation sur les sollicitations revenant aux éléments structuraux avec
une précision jugée satisfaisante pour les bâtiments faiblement et moyennement élevés
3- peut être utilisée pour un prédimensionnement préliminaire des éléments structuraux
devant être évalués ultérieurement par des méthodes rigoureuses.
4- peut fournir au concepteur un ordre de grandeur comme support pour la vérification des
résultats obtenus à partir de l’analyse dynamique.
La méthode basée sur la force latérale statique prend en compte la réponse nonlinéaire d’un
système parasismique à travers le facteur modificateur de la réponse R appelé aussi facteur de
comportement. Ce facteur a été initialement introduit vers la fin des années 70, et sert à
réduire l’efforttranchant de base (Ve) calculé à partir de l’analyse élastique en utilisant un
56
spectre de réponse ayant un amortissement de 5% (Sa,5) :
R
W.S
RV
V 5,ae (3.1)
Les recommandations du code NEHRP (National Earthquake Hazard Reduction Program)
qualifie le facteur R de facteur empirique de modification de la réponse prenant en compte
l’amortissement et la ductilité d’un système structurelpour des déplacements approchant le
déplacement structurel max. Les valeurs attribuées à ce facteur par les codes américains
(NEHRP, UBC et SEAOC) n’ont aucune base techniqueet comme il a été décrit par l’ATC-
1995a que ces valeurs sont issues des facteurs empiriques de la force horizontale adoptés par
le code SEAOC 1959 [1]. Comme le code RPA [2] a été initialement établi dans le format du
code américain UBC, ceci confirme le caractère empirique du coefficient de comportement R,
c'est-à-dire que ses valeurs n’ont aucune base technique et leurs fiabilités sur la performance
présumée de la réponse parasismique reste donc inconnue.
3.1 Notions de ductilité:
On entend par ductilité dans la conception structurelle, la capacité d’une structure à supporter
de larges déformations dans le domaine post-élastique sans jamais enregistrer une réduction
substantielle de résistance. En d’autres termes, l’abilité d’un système structurel à se déplacer
au-delà de sa limite élastique (δy) tout en résistant à la force latérale et dissipant l’énergie par
un comportement inélastique, elle est généralement caractérisée par le facteur de ductilité de
déplacementy
u
.
Ainsi dans les différents règlements courants, le critère de calcul de la force sismique pour des
structures ductiles a été établi sur la base que ces dernières seraient aptes à résister à des
séismes modérés sans dommages structurels et aptes à résister à des séismes sévères sans
s’effondrer mais subissant éventuellement des dommages structurels et non structurels. Il
devient donc nécessaire de définir au préalable le niveau ou la demande de ductilité.
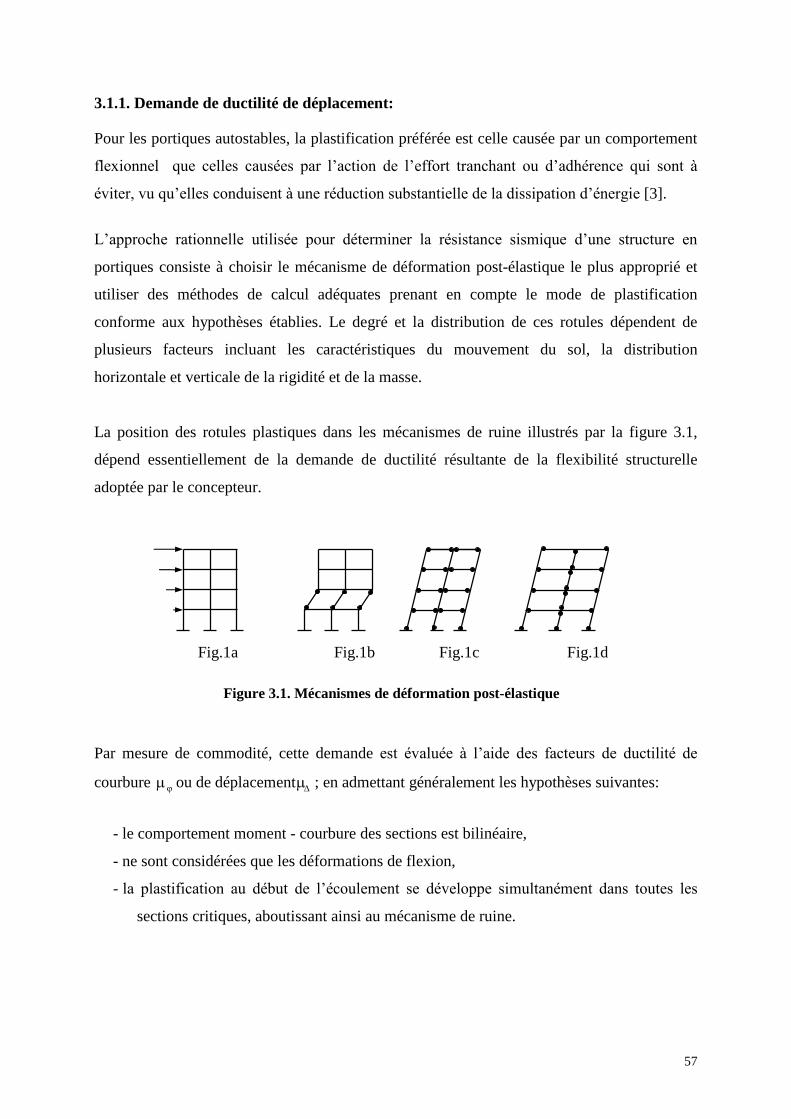
57
3.1.1. Demande de ductilité de déplacement:
Pour les portiques autostables, la plastification préférée est celle causée par un comportement
flexionnel que celles causées par l’action de l’effort tranchant ou d’adhérence qui sont à
éviter, vu qu’elles conduisent à une réduction substantielle de la dissipation d’énergie[3].
L’approche rationnelle utilisée pour déterminer la résistance sismique d’une structure en
portiques consiste à choisir le mécanisme de déformation post-élastique le plus approprié et
utiliser des méthodes de calcul adéquates prenant en compte le mode de plastification
conforme aux hypothèses établies. Le degré et la distribution de ces rotules dépendent de
plusieurs facteurs incluant les caractéristiques du mouvement du sol, la distribution
horizontale et verticale de la rigidité et de la masse.
La position des rotules plastiques dans les mécanismes de ruine illustrés par la figure 3.1,
dépend essentiellement de la demande de ductilité résultante de la flexibilité structurelle
adoptée par le concepteur.
Fig.1a Fig.1b Fig.1c Fig.1d
Par mesure de commodité, cette demande est évaluée à l’aide des facteurs de ductilité de
courbure ou de déplacement ; en admettant généralement les hypothèses suivantes:
- le comportement moment - courbure des sections est bilinéaire,
- ne sont considérées que les déformations de flexion,
-la plastification au début de l’écoulement se développe simultanément dans toutes les
sections critiques, aboutissant ainsi au mécanisme de ruine.
Figure 3.1. Mécanismes de déformation post-élastique

58
En adoptant des positions appropriées des points d’inflexion dans les poteaux, cl6.0 au niveau
inférieur et cl5.0 pour les autres niveaux, l’expression du déplacement élastique y en tête
d’un portique à r étages est comme suit [4] :
cr3c2c1c
2c
y ........31
r6l (3.2).
cr2c1c ,...,, : courbures des poteaux des r niveaux
Après cette phase élastique, les déplacements sont dus essentiellement à la rotation des rotules
plastiques qui donnent naissance à 2 possibilités de mécanisme de ruine.
1er cas : Mécanisme dû à la rotulation dans les poteaux d’un même étage
Dans ce cas, le processus de plastification se manifeste en premier dans les poteaux. La pire
des situations est celle où uniquement un seul niveau est affecté du fait que les poteaux des
autres étages sont plus résistants (Figure 3.1b). Il est évident qu’un tel mécanisme exige une
très grande demande de ductilité de courbure. Dans les ossatures de grande hauteur, cette
demande de ductilité est tellement importante qu’il s’avère impossible de la satisfaire et par
conséquent la ruine devient inévitable. Ce mode de rupture, observé fréquemment lors des
séismes sévères, est caractérisé principalement par la rotulation en tête et en pied des poteaux
du premier niveau. Le facteur de ductilité de déplacement pour un chargement horizontal
statique, est exprimé par la relation suivante [4]:
pc'
pccy
pc ll5.0l+1c
(3.3) ; avec pcycucpc l .
c
pc
c
pcc
l
l1
l
l3
31
r1+1 (3.4)
2eme cas : Mécanisme dû à la rotulation dans les poutres
Dans ce cas, la plastification dans les régions critiques des poutres précède celles des poteaux
qui sont plus rigides. Les rotules plastiques nécessaires pour le développement d’un tel

59
mécanisme ne se manifestent qu’à la base de ces derniers, comme l’illustre la figure 3.1c. Le
facteur de ductilité de déplacement est exprimé comme suit [4]:
à la base des poteaux :
y
pccc rl+1
c
pcc
l
lr3
31
r1+1
(3.5);
au niveau des zones nodales des poutres:
y
pbcrl+1
b
c
pbb
l
lr3
31
r1+1
(3.6);
avec pbybubpb l .
bl , cl :respectivement longueur de la poutre et longueur du poteau
'pcpc l,l : longueurs plastiques au niveau des rotules inférieures et supérieures du poteau
pbl : longueur plastique de la poutre
pc , pb : les rotations respectives au niveau des rotules plastiques du poteau et de la poutre
u , y : respectivement courbure ultime et courbure élastique
Le paramètre représentant le rapport des courbures élastiques a pour expression [4,5,6]:
by
av,cy
yb
yc
EIM
EIM
=
av,c
b
b2
u
av,c2
u
dd
bdM
bdM
EI :rigidité flexionnelle
uM , yM : respectivement moment ultime et moment élastique
bd , cd :respectivement profondeur effective de la poutre et profondeur effective du poteau
Il est apparu plus commode d’apprécier la demande de ductilité à travers le facteur de ductilité
de courbure (qui peut être obtenu par simple réarrangement des formules précédentes)
qu’avec celui de déplacement .En plus, il a été communément montré que les exigences
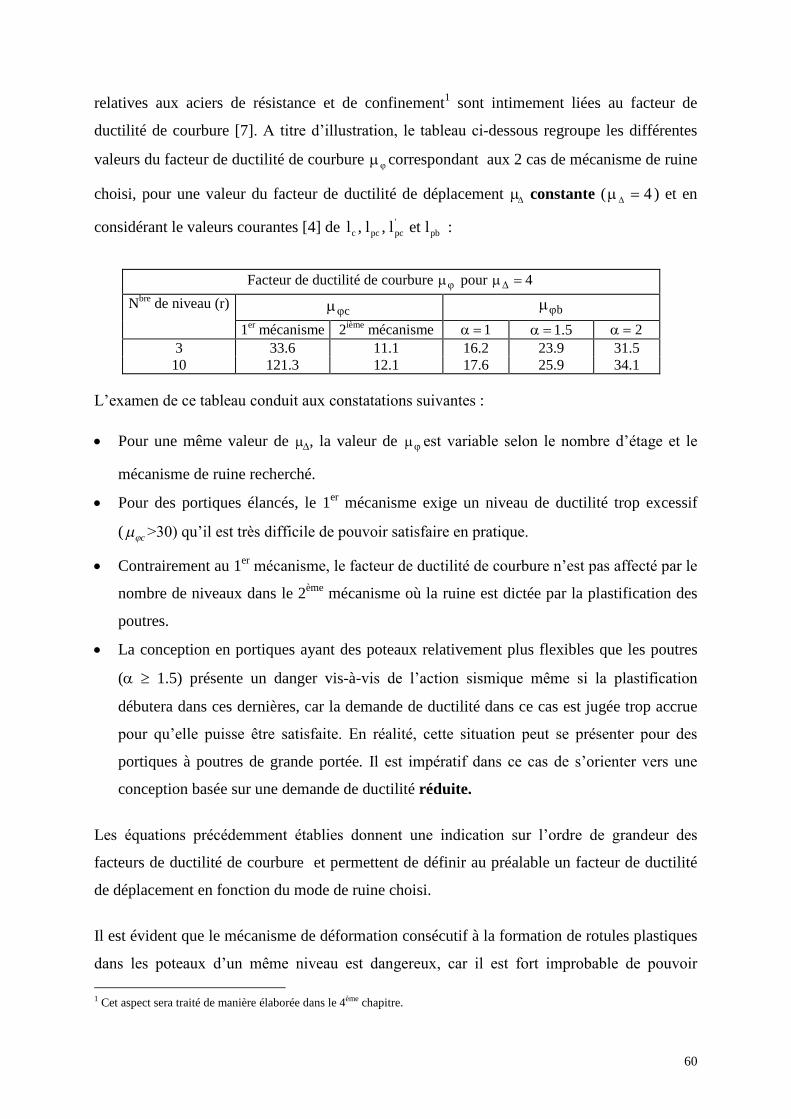
60
relatives aux aciers de résistance et de confinement1 sont intimement liées au facteur de
ductilité de courbure [7]. A titre d’illustration, le tableau ci-dessous regroupe les différentes
valeurs du facteur de ductilité de courbure correspondant aux 2 cas de mécanisme de ruine
choisi, pour une valeur du facteur de ductilité de déplacement constante ( 4 ) et en
considérant le valeurs courantes [4] de pb'pcpcc letl,l,l :
Facteur de ductilité de courbure pour 4
c bNbre de niveau (r)
1er mécanisme 2ième mécanisme 1 5.1 23 33.6 11.1 16.2
10 121.3 12.1 17.623.925.9
31.534.1
L’examen de ce tableau conduit aux constatations suivantes:
Pour une même valeur de , la valeur de est variable selon le nombre d’étage et le
mécanisme de ruine recherché.
Pour des portiques élancés, le 1er mécanisme exige un niveau de ductilité trop excessif
( c >30) qu’il est très difficile de pouvoir satisfaire en pratique.
Contrairement au 1er mécanisme, le facteur de ductilité de courbure n’est pas affecté par le
nombre de niveaux dans le 2ème mécanisme où la ruine est dictée par la plastification des
poutres.
La conception en portiques ayant des poteaux relativement plus flexibles que les poutres
(1.5) présente un danger vis-à-vis de l’action sismique même si la plastification
débutera dans ces dernières, car la demande de ductilité dans ce cas est jugée trop accrue
pour qu’elle puisse être satisfaite. En réalité, cette situation peut se présenter pour des
portiques à poutres de grande portée. Il est impératif dans ce cas de s’orienter vers une
conception basée sur une demande de ductilité réduite.
Les équations précédemment établies donnent une indication sur l’ordre de grandeur des
facteurs de ductilité de courbure et permettent de définir au préalable un facteur de ductilité
de déplacement en fonction du mode de ruine choisi.
Il est évident que le mécanisme de déformation consécutif à la formation de rotules plastiques
dans les poteaux d’un même niveau est dangereux, car il est fort improbable de pouvoir
1 Cet aspect sera traité de manière élaborée dans le 4ème chapitre.

61
fournir la ductilité de courbure adéquate pour survivre à un éventuel séisme sévère. Par
contre, le développement des rotules plastiques dans les poutres offrent une meilleure
dissipation d’énergie, et que ce mode de fonctionnement permet d’atteindre une ductilité de
courbure d’au moins 4 fois le facteur de ductilité de déplacement 4 .
Dans ce contexte, plusieurs codes exigent à ce que les poteaux des structures en portiques
autostables offrent une résistance flexionnelle adéquate afin de favoriser un développement
de mécanisme lié à la formation de rotules plastiques dans les poutres. Pour atteindre ce but,
Paulay [5] suggère que les moments fléchissants ultimes dans les poteaux soient majorés par
un coefficient variant entre 2 et 2.5, pour tenir compte notamment : de la sur-résistance de
flexion des rotules plastiques dans les poutres due à l’écrouissage des aciers longitudinaux,
des modes supérieurs de vibration et de l’action sismique bidirectionnelle. Le code NZS [8]
préconise un coefficient de majoration variant entre 1.67 et 2.64; par contre le code ACI-83[9]
le fixe à la valeur 1.2. Le RPA [10] rejoint ce dernier code en introduisant un coefficient de
1.25. Ceci nous parait allant à l’encontre de l’esprit de la prise en compte de l’évolution
récente de la réglementation internationale (déclarée dans l’avant propos du RPA99).
Bien que cette conception de «poteau fort-poutre faible» est fortement recommandée, le code
NZS signale 2 exceptions à cette règle :
a- Pour des constructions en portique de longue portée, ou bien se trouvant dans les régions
à faible sismicité, le comportement est essentiellement dicté par les charges verticales,
compromettant ainsi l’approche «poteau fort-poutre faible». Dans de telles structures, et
pour un nombre d’étages supérieur à 3, le développement des rotules plastiques se fait
simultanément au pied et en tête des poteaux intermédiaires alors que celles des poutres
n’auront lieu qu’au voisinage des poteaux de rive (Figure 1.d): c’est le mécanisme de
déformation mixte (Mixed sidesway mechanism). Pour ce type de structures, les forces
sismiques de calcul doivent être prises égales au double de celles des portiques ductiles,
pour minimiser la demande de ductilité.
b- Les mécanismes de déformation régis par le déplacement des poteaux (poteau faible-
poutre forte) sont autorisés pour le cas d’une structure non élevée (un à deux étages), ou
pour le dernier niveau d’une structure multi étagée. Dans ces situations, la demande de
ductilité dans les poteaux est réduite et peut être facilement réalisée par une disposition
du ferraillage saine et adéquate.
62
3.1.2. Structures faisant l’objet d’une ductilité limitée:
La confection des rotules plastiques des structures ductiles, basées sur le concept capacité de
résistance, capacité de déformation, exige parfois de grandes quantités d’armatures
transversales difficiles à disposer suite à l’encombrement du ferraillage. Dans cette situation,
il serait préférable d’adopter une autre conception qui consiste à réduire la demande de
ductilité ce qui conduit à des forces sismiques de calcul plus grandes; comprises entre celles
utilisées dans le calcul élastique et celles prises pour une structure hautement ductile.
Cette alternative présente l’avantage de tolérer une grande relaxation vis à vis des
dispositions liées à la demande de ductilité. Par conséquent, la confection du ferraillage est
plus aisée. Dans ce contexte, le code NZS limite le coefficient de ductilité de déplacement
entre 2 et 3 pour les portiques autostables. Malheureusement, cette option ne figure pas dans
les prescriptions actuelles du code RPA.
La réponse parasismique des portiques peut avoir un large spectre de comportements, donc
différents niveaux de ductilité. Les différents règlements parasismiques introduisent 3
grandes classes de ductilité: faible (L), moyenne (M) et élevée (H).
La spécification du niveau de ductilité au sein du code algérien apparaît très restreinte du
moment que le coefficient de comportement est pris constant et ce, pour chaque catégorie de
structure. A titre d’indication, la valeur du niveau de ductilité préconisée par le RPA pour une
structure en portiques autostables pour un coefficient de comportement R = 5 1Q 2; peut
être qualifiée comme étant relativement élevée [3]. Il est clair que le RPA, dans sa version
actuelle, enlève au concepteur toute possibilité d’exiger une certaine demande de ductilité
fonction du mécanisme de déformation désiré.
3.2. Facteur de comportement R:
Les procédures conventionnelles spécifiées dans les codes parasismiques universels utilisent
l'analyse élastique pour évaluer les charges sismiques induites sur les bâtiments. Pour tenir
compte du comportement inélastique, ces charges sismiques sont modifiées en introduisant le
facteur de comportement structurel ou facteur de réduction de la force de calcul (R), défini
comme suit:
calcul
élastiue
FF
R
2Le code NZS confère aux structures soumises à des séismes sévères un taux de ductilité minimum de 4.
63
Selon le RPA [10] la force sismique de calcul est quantifiée comme suit :
W.R
Q.D.AV = Q.
RVe (3.7);
Il est clair que le terme ‘ D.A.W ’ n’est autre que la force élastique eV qui est le produit de la
masse accélérée amplifiée, pour tenir compte de l’effet dynamique. Le terme ‘ QR ’exprime
le coefficient caractérisant le comportement structurel et son niveau de sécurité.
Des méthodes analytiques ont été utilisées pour justifier le facteur de réduction de la force de
calcul, qui est tributaire du niveau de ductilité du système d'une part, et de la surésistance due
l'écrouissage et la formation des rotules d'autre part.
Le comportement des structures renfermant des membres ductiles peut être généralement
idéalisée par la figure 3.2. La capacité de la structure n’est pas encore dépasséelors de
l’apparition de la première rotule, car c’est le début de la formation du mécanisme plastique et
la structure continue à développer une capacité de résistance et de déformation.
Figure 3.2. Effort tranchant de base–déplacement global
La capacité ultime n’est considérée atteinte que lorsque max . Cette capacité de résistance
peut approximativement être égale à
RV
V ey (3.8) et elle est supérieure à la capacité
correspondante à la formation de la première rotule :RV
V es (3.9).
64
Le rapport
RR
V
VR
s
ys (3.10) est appelé facteur de sur résistance ou de réserve de
résistance, et l’équation (3.10) donne sR.RR (3.11). En d’autres termes mécanisme
élastiue
FF
R ,
etcalcul
mécanismes F
FR où Fmécanisme est la force latérale nécessaire au développement du
mécanisme résultant, et elle est évaluée à l'aide des analyses; dynamique inélastique et
statique inélastique (static pushover analysis) des bâtiments conformément au code. Le
spectre de dimensionnement à réponse inélastique (IDRS) peut être approximativement
obtenu en divisant le spectre de dimensionnement à réponse élastique (EDRS) par le produit
sR.RR pour chaque plage de T.
Dans la moitié des années 80, un programme de recherche expérimentale conduit par
l’université de Berkeley a permis de formuler le facteur de comportement R comme le produit
de 3 facteurs tenant respectivement compte de la ductilité, de la réserve de résistance et de
l’amortissement visqueux ; R.R.RR s (3.12).
Cependant le dernier facteur a été pris égal à l’unité. Car malgré que ce facteur peut être
utilisé pour l’estimation du déplacement des structures inélastiques, il ne pourra être utilisé
pour réduire proportionnellement la demande de résistance [11]
Des études récentes (ATC 1995a) [12] adopte une formulation similaire:
Rs R.R.RR (3.13)
où RR est le facteur de redondance structurelle introduit dans le but de quantifier
l’amélioration de la réserve de sécurité des systèmes en portiques utilisant la multiplication
modulaire des travées et des niveaux dans chaque direction principale. Il est à noter que les
composants de R sont interdépendants entre eux, spécialement le facteur de ductilité et celui
de résistance. Cependant la formulation de R ne prend pas en considération l’effet
d’irrégularité plane ou verticale. L’irrégularité structurelle peut être introduite en réduisant le
facteur de comportement par un coefficient minorateur à l’instar de notre code sous forme de
facteur de qualité. Une forte pénalisation de la force de calcul (efforts tranchants de base très
importants) sert à décourager l’utilisation des structures irrégulières tout en réduisant les
incertitudes associées à la réponse nonlinéaire de telles structures.

65
3.2.1. Facteur de ductilité R :
Le facteur R est une mesure de la réponse nonlinéaire globale d’un système de
contreventement et non pas de celle de ses éléments constituants. Il est évalué pour un spectre
inélastique à ductilité constante et il tient compte de la différence entre un chargement
statique et un chargement dynamique réversible induit par l'action sismique. Le bâtiment est
modélisé comme un système à un seul degré de liberté (SDOF), où sa ductilité de
déplacement disponible est estimée, et les relations entre R et (ductilité de déplacement)
sont développées. Ces relations ont été le sujet de recherche pour les 3 dernières décennies, et
il a été trouvé qu’elles sont fonction des caractéristiques de la structure (ductilité,
amortissement et période de vibration) ainsi que des caractéristiques du mouvement du sol.
Newmark et Hall [11] ont relié R au niveau de demande de ductilité de déplacement,
fonction de la période par les expressions suivantes:
1R pour sT 03.0 (égalité des accélérations)
12R sTs 5.01.0 (égalité des énergies)
R sT 5.0 (égalité des déplacements)
Bertero et Miranda ont suggéré des expressions remarquables de forme unifiée donc simple
d'utilisation, obtenues à partir de 124 enregistrements de mouvement de sol couvrant des sites
rocheux, alluvionnaires et très meubles. Elles ont été trouvées satisfaisantes surtout pour les
sites alluvionnaires [13].
11
R
(3.14)
26.0)Tln(5.1expT21
TT101
1
site rocheux
22.0)Tln(2expT52
TT121
1
site alluvionnaire
21
11 25.0)TTln(3expT4T3
T3T
1 site meuble

66
: coefficient caractérisant la nature du sol.
T1 : période caractéristique du sol.
Krawinkler et Nasser [14] évaluèrent le spectre de réponse inélastique des systèmes
bilinéaires avec chute de rigidité sous 15 excitations sismiques enregistrées sur sites rocheux
et sols alluvionnaires. Ils proposèrent des relations pour R fonction de la période naturelle, et
la deuxième pente du système bilinéaire en considérant un amortissement de 5%
c1
1)1(cR (3.15)
nan
an
n Tb
T1T
),T(c
42.0b;1a pour α=0
où les paramètres a et b ont été obtenus à partir de l’analyse en régression, et α est la rigidité
après écoulement exprimée en % de la rigidité initiale. Pour α variant entre 0 et 10%, a=1.0 et
b varie entre 0.42 et 0.29. En général le coefficient modificateur R augmente
proportionnellement avec le niveau de ductilité recherché, et diminue avec l’augmentation de
l’écrouissage.Pour un bâtiment ayant une période fondamentale supérieure à 0.75s, l’effet des
modes supérieurs nécessitera une augmentation de la force latérale de dimensionnement si le
niveau de ductilité souhaité est préservé. Il a été en outre constaté [1] que les différences
enregistrées entre les relations de Krawinkler et Miranda sont considérées comme petites
pouvant naturellement être ignorées.
Le coefficient de réduction R introduit par Vidic et al [15] a été assimilé à une courbe
bilinéaire, et 2 modèles d’hystérésis ayant 10% d’écrouissage après écoulement ont été
considérés; bilinéaire et dégradation de rigidité (modèle Q). Dans la plage des périodes
courtes ce facteur augmente linéairement avec la période pour atteindre une valeur presque
égale à la demande de ductilité. Il restera constant pour le restant des périodes.
0nc
1
0n0
nc1
TT1)1(c
TT1TT
)1(cR
R
R
(3.16)
0T : période divisant la plage des périodes en 2 ; elle est reliée à la période caractéristique 1T par la
relation 1c
20 T..cT T
67
Les coefficients TR cetccc ,, 21 dépendent du comportement hystérétique et du modèle
d’amortissement.
Han et al [16] proposèrent une formulation de 4321 C*C*C*C*),T(RR tenant compte de
la période structurelle, la demande de ductilité et les caractéristiques de différents modèles
hystérétiques, respectivement (α1: modèle bilinéaire,α2 : dégradation de résistance,α3 : dégradation
de rigidité etα4 modèle en hystérésis pincés). Une expression simplifiée pour un modèle élastique -
parfaitement plastique a été aussi établie :
)TBexp(1A),T(RR 00 (3.17)
15.0.99.0A 0
83.00 .9.23B
Dans la plage des périodes courtes et intermédiaires, ce facteur de comportement R dépend de la
ductilité et de la période ; cependant pour la plage des périodes longues il est faiblement influencé
par la période et sa valeur est presque égale à la ductilité.
Le facteur R proposé par Priestley [17], prend en compte la période caractéristique spécifique au
site et il est exprimé par la relation:
gT5.1
T11R (3.18)
qui suppose l'égalité des déplacements R quand gT5.1T et l'égalité des accélérations
1R quand 0T , entre ces 2 valeurs R est obtenu par interpolation linéaire.
En adaptant ces valeurs au code RPA, R ne sera donc valable que pour la plage des périodes
élevées; indiquées ci dessus:
Périodes (s)SiteCourtes Intermédiaires Longues
S1 0.19 0.45S2 0.26 0.60S3 0.32 0.75S4 0.45 1.05

68
Il en ressort clairement que pour les structures appartenant aux plages de périodes courtes et
intermédiaires la force de calcul est inévitablement sous estimée. A titre d'illustration pour un site
rocheux, la figure 3.3 confirme cette constatation ( 5R ), pour les différents auteurs précités).
3.2.2. Facteur de réserve de résistance sR :
La capacité de résistance latérale Vu d’une structure dépasse généralement sa demande de
résistance Vb car ses éléments constitutifs sont dimensionnésde telle façon qu’ils eussent des
capacités substantiellement plus grandes que les efforts résultants. Ceci est attribuable au fait
que la résistance des matériaux utilisés est généralement plus grande que la résistance
nominale spécifiée, de plus le contrôle des déplacements résulte généralement en un
surdimensionnement du coffrage et les exigences au niveau du détail conduisent le plus
souvent à adopter des éléments plus résistants que demandés. Cependant le rapport (Vu/Vb)
pour un système structurel est variable fonction de la zone sismique et sa période
fondamentale. Plusieurs études ont été entreprises dans ce domaine; (Uang et Maarouf 1993)
ont analysé un portique de rive composé de 6 niveaux sous l’action sismiquede Loma Priota
ont reporté un sR =1.5. Huang shikozuko (1994) étudièrent un portique moyennement ductile
de 4 niveaux en zone de moyenne sismicité et ont déterminé un coefficient de sur résistance
sR = 2.2. Krawinkler et Nasser [14] étudièrent aussi le système à degré de liberté multiple
(MDOF) et conclurent pour la conception poteau fort - poutre faible que la demande de
résistance des systèmes à un seul degré de liberté doit être augmentée si les systèmes à
0
1
2
3
4
5
6
0 0,5 1 1,5 2
Période T en (s)
Rµ RPA 99
N et HPriestleyMiranda-BerteroKrawinkler- NasserV-F-F
Figure 3.3. Facteur de comportement Rμ, (μ = 5 , site rocheux)
69
plusieurs degré de liberté sont considérés; afin de limiter la ductilité de déplacement de niveau
max à celle d’un seul degré de liberté.
La comparaison établie par Popov et al [18] sur les recommandations relatives à l’évaluation
des charges latérales établies par différents codes en vigueur, a permis de relever une
similarité dans la formulation exception faite à la différence dans la notation. Le code NEHRP
préconise un coefficient 67.1R s , alors que le code NZS le fixe égal à 1.5.
Il a été mis en évidence [13] que la surésistance dépend de la flexibilité de la structure, elle est donc
plus grande pour bâtiments faiblement élevés que pour ceux moyennement élevés (4 à 5 niveaux):
s3.0T 7.25.1x8.1R s pour s1.0T
s3.0T 5.1R s
Comme l’écart enregistré entre les différentes valeurs de sR est significatif [13] (variant entre
1.5 et 2.7), son utilisation dans le domaine professionnel n’est donc pas sans risque, pour ce
plus d’études sont nécessaires afin de développer des facteurs de sur résistance fiables
pouvant être adoptés par les codes parasismiques.
L’étude comparative menée par Mwafy et Elnashai [19] sur différentes classes de bâtiments
en considérant plusieurs états limites :
-déplacement relatif de niveau
-plastification des poteaux
-indice de stabilité
-chute globale de résistance
a permis de conclure que le déplacement de niveau reste le paramètre de ruine contrôlant la
réponse de bâtiments.
Maheri et al [20] ont rapporté dans une étude sur le facteur de comportement global pour un
déplacement relatif maintenu constant (1.5% de la hauteur) que ce facteur décroît avec
l’augmentation du nombre de niveaux (il a été précédemment signalé que R doit être réduit
si T > 0.75s afin de tenir compte de l’effet des modes supérieurs, le facteur de comportement
R doit lui aussi être minoré.)
70
3.2.3. Facteur de redondance RR :
Malgré que la redondance structurelle est fortement recommandée dans la conception
parasismique de part le monde, les structures couramment utilisées se composent
généralement d’un nombre réduit de portiques, les catégorisant comme ayant une redondance
réduite. Afin de doter la structure d’une redondance adéquate, plusieurs chercheurs [Bertero
1986, Whittaker 1990] recommandent 4 lignes de portiques dans chaque direction comme
minimum requis. Il devient donc possible de pénaliser les structures moins redondantes avec
des forces latérales plus grandes (tableau ci-dessous).
Nombre de lignes Facteur de redondance2 0.713 0.864 1.0
Le code RPA99 introduit cette pénalité à travers un coefficient de qualité égal à 1.10
(majoration de l’effort tranchant de 10%) résultant en un coefficient RR =1/Q=0.9 très proche
de la moyenne des valeurs du tableau précédemment cité ( RmoyR =0.857).
3.2.4. Facteur de correction MDOF - SDOF :
Le facteur R précédemment discuté peut être utilisé dans la conception des structures
pouvant être approximativement modélisées, comme un système à un degré de liberté.
Cependant la plupart des structures ont besoin d’être modélisées comme système à plusieurs
degrés de liberté présentant un comportement beaucoup plus complexe que celui ayant
uniquement un seul degré de liberté spécialement dans le domaine nonlinéaire. Il devient donc
nécessaire de prendre en considération l’éventuelle concentration de ductilité de déplacement
dans certains niveaux à travers un coefficient minorant le facteur R qui représentera alors le
coefficient maximal de réduction de résistance permettant le contrôle adéquat la demande de
ductilité de déplacement de niveau des structures présentant une résistance égale à la
résistance de dimensionnement. Dans ce contexte, Miranda [21] proposa pour des structures
régulières respectant la condition poteau fort - poutre faible la formulation suivante :
R
RRR
R MDOF
SDOF
MDOFM donnant 12
M )(LnT15.01R
(3.19)
71
3.2.5.Facteur tenant compte de l’effet dynamique P :
L’étude entreprise par Han et al[22] a pris en considération l’effet P dans la procédure de
dimensionnement parasismique en calibrant le facteur de ductilité R par un coefficient C
déterminé à l’aide d’une étude statistique. Cette calibration s’accorde bien avec R du fait
que ces 2 facteurs sont fonction des caractéristiques structurelles, niveau de demande de
ductilité (niveau de réponse) et caractéristiques du mouvement de sol.
T,,C.RR '
T,,C =coefficient prenant en compte respectivement le coefficient de ductilité, le
coefficient de stabilité, et la période du système structurel.
Les auteurs ont trouvé un faible coefficient de corrélation (0.0341) entre le coefficient C et la
période structurelle, pour ce cette dernière ne sera pas prise en considération dans la
formulation de C. Cependant il a été trouvé que le niveau de ductilité et le coefficient de
stabilité affectent sensiblement le facteur C, il en découle que ,fC .
L’analyse par régression entreprise englobant 40 enregistrements sismiques (rocher et sol
ferme), 37 périodes naturelles (0.2 à 2 s par pas de 0.05s), 9 coefficients de stabilité (0 à 0.2
par pas de 0.025) et 6 niveaux de ductilité (1 à 6); a permis d’aboutir à l’expression suivante:
18749.25911.11,fC (3.20)
On remarque que le facteur de correction caractérisant l’effet P est inversement
proportionnel au niveau de ductilité et au coefficient de stabilité.
Le code algérien dispense la vérification vis-à-vis des effets du second ordre si le coefficient
de stabilité 10.0 , dans ce contexte pour une demande de ductilité 4 , C prend la
valeur de 0.58 (eq.3.20) résultant ainsi en une majoration de presque 50% sur l’effort
tranchant de base.
3.2.6. Evaluation systématique:
Le facteur modificateur de la réponse sismique joue un rôle controverse dans la procédure de
dimensionnement parasismique adoptée par le code Algérien. Aucun autre paramètre entrant
dans la formulation de l’effort tranchant n’a plus d’impact sur la valeur des efforts résultants
d’un système de contreventement que ce facteur. Malgré sa grande influence sur le
dimensionnement parasismique donc sur la performance des structures, aucune base
72
scientifique ne relie les valeurs de R adoptées par notre code. Il serait donc difficile
d’améliorer la pratique courante de la conception en force dans sa forme courante sans une
telle base. Si la nouvelle formulation présentée dans ce chapitre est à adopter afin d’améliorer
la fiabilité des valeurs attribuées à R pour différents systèmes structurels, des études
systématiques coordonnées deviennent alors nécessaires pour caractériser totalement
l’interdépendance des facteurs de ductilité, de résistance et de redondance.
Les facteurs de ductilité et de résistance doivent être évalués pour chaque type de système
structurel et ce pour chaque zone sismique utilisant les définitions standardisées de la ductilité
et de la résistance.
3.2.7. Introduction du facteur R dans la conception en performance:
Le facteur de comportement dans forme globale Rs R.R).C.R(R serait bien approprié pour
être incorporé dans une procédure de dimensionnement en performance.
Un dimensionnement en performance est bien fait si la structure est dimensionnée dans le
détail de telle façon que les déformations locales restent inférieures à leurs limites
correspondantes pour chaque niveau de performance. Les demandes et les de déformation
sont vérifiées au niveau des zones critiques (rotules plastiques) en vérifiant la déformation
max, la ductilité de déformation ; la courbure max, la ductilité de courbure ; la rotation
max, la ductilité de rotation avec leurs limites respectives. Pour un dimensionnement
préliminaire, la demande ductilité de niveau et la demande de déplacement relatif entre
niveaux sont reliés entre eux par la demande déplacement d’écoulement, ils seront de ce fait
les mieux indiqués pour permettre l’implantation de R dans la conception en performance.
Malgré que ces paramètres ne prennent pas en compte l’accumulation de l’endommagement
des éléments structuraux, ils présentent plusieurs avantages à savoir:
de plus qu’ils sont simples et les ingénieurs sont familiers avec eux, la plupart du travail de
recherche expérimentale a été établi en les prenant en considération. Cependant leurs limites
nécessitent d’être calibrés avec attention afin d’établir un contrôle adéquat de
l’endommagementpour différents niveaux de performance. Les limites de demande de
ductilité de niveau et de déplacement relatif de niveau varient avec le système structurel et le
niveau de performance sélectionné (life safety, near collapse et collapse).
73
C’est pour cette raison qu’on a besoin lors du dimensionnement préliminaire d’évaluer la
capacité de résistance latérale de la structure nécessaire pour limiter la demande de ductilité
de déplacement globale ainsi que la demande de déplacement global dans une certaine limite
conduisant ainsi au control local de la ductilité de niveau et du déplacement relatif entre
niveaux. Si le spectre de dimensionnement élastique est spécifié (connu) pour chaque niveau
de performance, le facteur R permettra alors l’estimation de la capacité de résistance requise
particulièrement pour les niveaux de performance vie sauve, pré ruine et ruine.
L’implantation du facteur R dans la conception en performances nécessite la spécification des
demandes max tolérables de ductilité de niveau ainsi que du déplacement relatif d’étage pour
chaque système structurel et niveau de performance
Conclusion
L’identification du facteur modificateur de la réponse sismique est faite à travers une
formulation incluant la demande de ductilité, la réserve de résistance, la redondance
structurelle, MDOF et l’effet P . Le but de cette formulation est de fournir une base
technique pour les valeurs à attribuer au coefficient de comportement R.
Cette étude a permis de faire ressortir les points suivants :
Elargir le spectre de ductilité afin de répondre à une grande variété de structures.
En spécifiant des valeurs pour le facteur de comportement indépendamment de la période et du
niveau de ductilité le code Algérien s'est mis dans le côté non conservateur pour les structures
appartenant aux plages de périodes courtes et intermédiaires où la force de calcul sera
inévitablement sous estimée.
Le code RPA introduit l’effet de redondance, tout en faisant abstraction à la réserve de
résistance et aux effets P
Si le facteur de réserve de résistance reste sans effet sur le dimensionnement car le facteur R
établi par le code ne concerne que le niveau de ductilité, cependant l’effet P peut conduire
àune sous estimation importante de l’effort tranchant de base.
Il reste encore nécessaire d’adapter le coefficient R pour prendre en considération les degrés de
liberté multiples.
74
Références:
[1]- A. Whittaker, G Hart, C Rojahn ‘Seismic Response Modification Factors’ Journal Structural
Engineering, April 1999 pp 438-444
[2]- Recommended Seismic Resistant Design Provisions for Algeria. T.C.Zsutty and H.C.Shah
The John A.Blume Center; Stanford University. June 1978
[3]- R.Park, ‘Capacity Design of Ductile of RC Building Structures for Earthquake Resistance’,
The Structural Engineer, Aug.1992.
[4]- R.Park,T.Paulay, ‘Reinforced Concrete Structures’, J.Wiley, New-York, 1975.
[5]- T. Paulay, ‘A Critique of the Special Provisions for Seismic Design of the Building Code
Requirements for Reinforced Concrete (ACI 318-83)’, ACI Journal, March-April 1986.
[6]- H.Scholz ‘Ductility and Plastic Design of RC Sway Frames’, Magazine of Concrete
Research, June 1993.
[7]- B.Bousalem, N.Djebbar, N.Chikh, ’Performance Parasismique des Portiques en Béton,
Aspect Théorique et Constat Réglementaire, 2ème Partie : Confinement des zones dissipatives
d’énergie’; Revue Algérie Equipement N°34 Janvier 2002.
[8]- NZS 4203 General Structural Design and Design Loadings for Buildings, Wellington,
Standards Association of New Zealand, 1992.
[9]- Building Code Requirements for Reinforced Concrete, ACI 318-89.
[10]- RPA99 Règles Parasismiques Algériennes,CGS Jan.2000
[11]- B.Borzi, A.S.Elnashai,’Refined Force Reduction Factors for Seismic Design’,
Engineering Structures, 22 (2000), 1244-1260. Elsevier
[12]- ATC,(1995a). Structural Response Modification Factors, ATC-19 Report, Applied
Technology Council, Redwood City, California.
[13]- A.J.Kappos, ’Evaluation of Behaviour Factors on the Basis of Ductility and Overstrength
Studies, Engineering Structures’, 21 (1999), 823-835. Elsevier
[14]- Nassar, A. and Krawinkler, H. (1991). "Seismic Demands for SDOF Report No. 95, The
John A. Blume Earthquake Engineering Center, Stanford University.
[15]- T.Vidic, P.Fajfar, M.Fishinger,’Consistent Inelastic Design Spectra: Strength and
Displacement’, Journal of Earthquake Engineering and Structural Dyn., 23 (1994), 507-521.
[16]- L.H.Lee, S.W.Han,’Determination of Ductility Factor Considering Different Hysteretic
Models’, Journal of Earthquake Engineering and Structural Dynamics, 28 (1999), 957-977.
[17]- Nelson.Lam et al, ’The Ductility Reduction Factor in the Seismic Design of Buildings’,
Earthquake Engineering and Structural Dynamics, 27 (1998), 749-769. Elsevier
75
[18]- E.P.Popov, C.E.Grigorian, T.S Yang 'Developments in Seismic Analysis and Design'.
Engineering Structures, 1195, Vol.17, N°3 pp 187-197.
[19]- A.M.Mwafy, A.S.Elnashai ‘Calibration of Force Reduction Factors of RC Buildings. Journal
of Earthquake Engineering 2002; 6(2): 239-273.
[20]- M.R.Maheri, R.Akbari ‘Seismic Behaviour Factor, R, for Steel X-Braced and Knee-Braced
RC Buildings. Engineering Structures 25 (2003) 1505-1513
[21]- E.Miranda, ‘Strength Reduction Factors in Performance-Based Design’, NISEE, February
1997, Berkeley, California.
[22]- S.W.Han, O.S.Kwon, L-H.Lee ‘Investigation of Dynamic P-δ Effect on Ductility Factor’
Structural Engineering and Mechanics, Vol. 12, N°3 (2001) pp 249-266
76
Introduction
Le code RPA préconise une limite sur la période comme facteur de contrôle dans le processus
de dimensionnement fonction du système structurel. Comme le code RPA [1] est basé sur le
dimensionnement en force; il recommande un coefficient de comportement global fixe
fonction de la nature du contreventement tout en faisant abstraction du niveau de ductilité
global concordant. Le facteur de modification R est un outil simple introduit dans le but de
concrétiser un dimensionnement inélastique. Cependant les valeurs de ce facteur spécifiées
par les codes dépendent des matériaux de construction et du type du système structurel
adopté. Ces valeurs sont arbitraires et difficilement justifiables du moment qu’elles ne
paraissent pas être établies sur une base analytique ou expérimentale. Il s’avère donc plus
rationnel de définir une période limite en se basant sur une déformation limite que sur des
expressions empiriques basées essentiellement sur une description générale du système
structurel et de sa géométrie. Le travail entrepris consiste en l'évaluation de cette limite à
travers deux procédures basées sur des méthodes approchées, en considérant un déplacement
limite en tête (global drift). Le niveau de ductilité global (μ) à attribuer au coefficient
réducteur de la force élastique QRR est déterminé en exploitant les relations
nTR communément reconnues à travers le monde, et par l'occasion l'amortissement
équivalent du système structurel en utilisant des relations jugées satisfaisantes.
L’évaluation de la période est conduite dans l’esprit de l’introduire dans un coffrage d’un
dimensionnement en capacité (Figure 4.1). Ce dimensionnement consiste à garantir une
rigidité latérale minimale (période maximale, Tmax) d’où une capacité de résistance minimale
requise pour contrôler l’endommagement structurel à travers le contrôle d’un niveau de
déformation tolérable ou un niveau de ductilité donné. Vu que la boucle de contrôle sur la
déformation est inexistante au sein de notre code; la procédure d’évaluation telle qu’elle est
proposée dans cette partie s’accorde avec un dimensionnement en capacité du moment qu’elle
permet d’ajuster le niveau de demande de résistance requis fonction d’un niveau de ductilité
introduit tacitement à travers les recommandations spécifiques aux aciers. Ceci permettra de
hisser la conception parasismique adoptée par le code RPA afin qu’elle puisse répondre au
minimum requis c'est-à-dire : une conception à deux niveaux de performance.
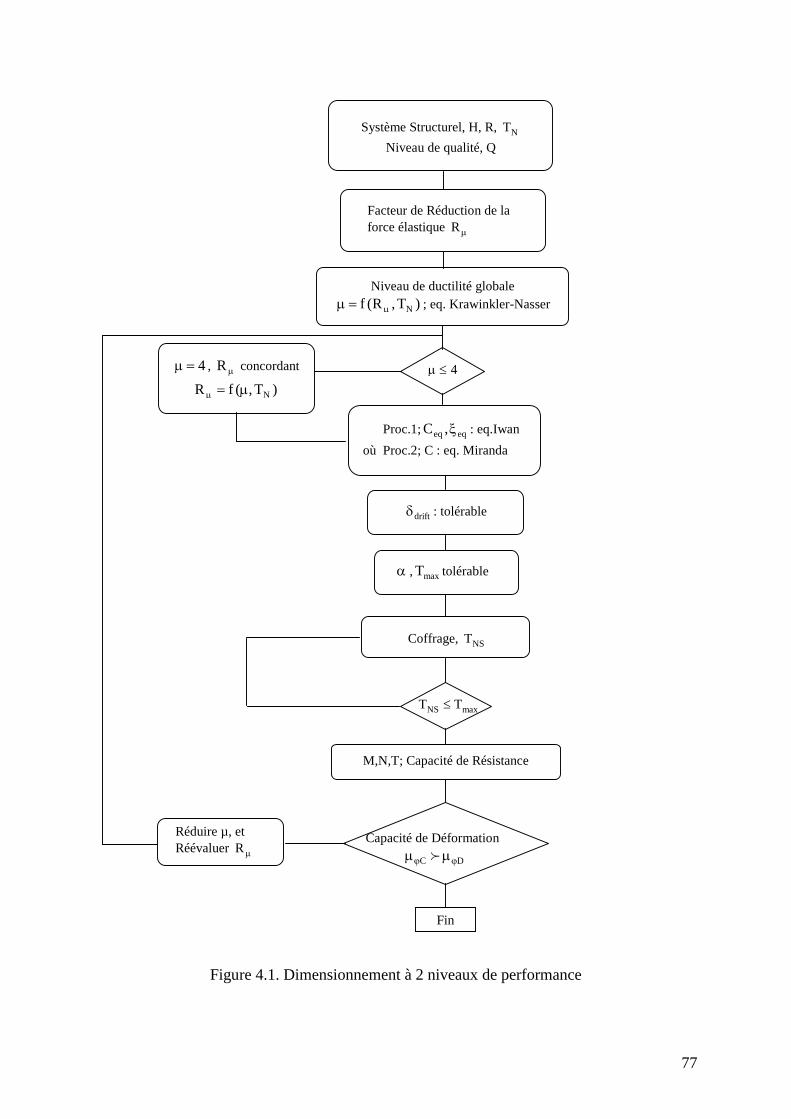
77
Figure 4.1. Dimensionnement à 2 niveaux de performance
Système Structurel, H, R, NT
Niveau de qualité, Q
Facteur de Réduction de laforce élastique R
Coffrage, NST
maxNS TT
M,N,T; Capacité de Résistance
Capacité de Déformation
DC
Fin
Niveau de ductilité globale)T,R(f N ; eq. Krawinkler-Nasser
4
Proc.1; eqeq ,C : eq.Iwan
où Proc.2; C : eq. Miranda
Réduire µ, etRéévaluer R
4 , R concordant
)T,(fR N
, maxT tolérable
drift : tolérable
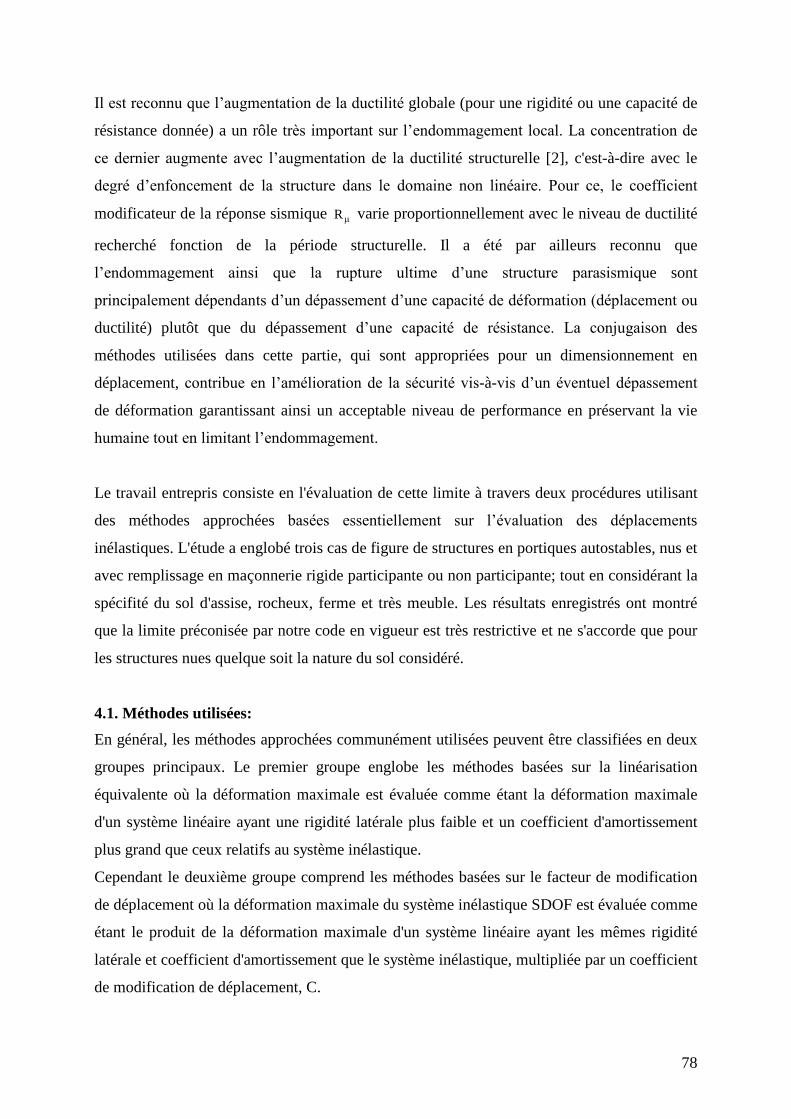
78
Il est reconnu que l’augmentation de la ductilité globale (pour une rigidité ou une capacité de
résistance donnée) a un rôle très important sur l’endommagement local. La concentration de
ce dernier augmente avec l’augmentation de la ductilité structurelle [2], c'est-à-dire avec le
degré d’enfoncement de la structure dans le domaine non linéaire. Pour ce, le coefficient
modificateur de la réponse sismique R varie proportionnellement avec le niveau de ductilité
recherché fonction de la période structurelle. Il a été par ailleurs reconnu que
l’endommagement ainsi que la rupture ultime d’une structure parasismique sont
principalement dépendants d’un dépassement d’une capacité de déformation (déplacement ou
ductilité) plutôt que du dépassement d’une capacité de résistance. La conjugaison des
méthodes utilisées dans cette partie, qui sont appropriées pour un dimensionnement en
déplacement, contribue en l’amélioration de la sécurité vis-à-vis d’un éventuel dépassement
de déformation garantissant ainsi un acceptable niveau de performance en préservant la vie
humaine tout en limitant l’endommagement.
Le travail entrepris consiste en l'évaluation de cette limite à travers deux procédures utilisant
des méthodes approchées basées essentiellement sur l’évaluation des déplacements
inélastiques. L'étude a englobé trois cas de figure de structures en portiques autostables, nus et
avec remplissage en maçonnerie rigide participante ou non participante; tout en considérant la
spécifité du sol d'assise, rocheux, ferme et très meuble. Les résultats enregistrés ont montré
que la limite préconisée par notre code en vigueur est très restrictive et ne s'accorde que pour
les structures nues quelque soit la nature du sol considéré.
4.1. Méthodes utilisées:
En général, les méthodes approchées communément utilisées peuvent être classifiées en deux
groupes principaux. Le premier groupe englobe les méthodes basées sur la linéarisation
équivalente où la déformation maximale est évaluée comme étant la déformation maximale
d'un système linéaire ayant une rigidité latérale plus faible et un coefficient d'amortissement
plus grand que ceux relatifs au système inélastique.
Cependant le deuxième groupe comprend les méthodes basées sur le facteur de modification
de déplacement où la déformation maximale du système inélastique SDOF est évaluée comme
étant le produit de la déformation maximale d'un système linéaire ayant les mêmes rigidité
latérale et coefficient d'amortissement que le système inélastique, multipliée par un coefficient
de modification de déplacement, C.

79
4.1.1. Méthodes de linéarisation équivalente:
La réponse sismique des systèmes inélastiques peut être estimée par des méthodes analytiques
approximatives où le système non linéaire est remplacé par un système linéaire équivalent.
Ces techniques ont vu le jour dans les années 60, et le travail fondamental a été accompli sur
deux décennies (Hudson 1965; Jennings 1968; Iwan et Gates 1979). En général, les méthodes
approchées déterminant les paramètres (caractéristiques) du système linéaire équivalent se
subdivisent en deux catégories ; les méthodes basées sur la réponse harmonique (rigidité
sécante) et les méthodes basées sur la réponse aléatoire (random response). Les méthode
appartenant à la première catégorie surestiment considérablement (period shift) l'amplification
de la période, cependant celles considérant la réponse aléatoire (Iwan & Gates) estiment cette
amplification d'une manière plus réaliste. La méthode basée sur la structure substituée
(substitute structure method), populaire pour la conception en déplacement (Gulkan & Sozen
1974, Shibata-Sozen 1976, Moehle 1992, Kowalsky 1995, Wallace 1995), n'est autre qu'une
variante de la méthode basée sur la rigidité sécante. Il est reconnu que ces 2 méthodes (rigidité
sécante et structure substituée) basées sur la réponse harmonique ne sont pas aussi précises
que celles basées sur la réponse aléatoire [3]
Rigidité sécante:
La méthode proposée par Rosenblueth et Herrera était la première méthode de linéarisation
équivalente utilisant la rigidité sécante à déformation ultime (connue aussi comme méthode
de rigidité géométrique) comme base pour sélectionner le déplacement de période ou période
équivalente. L'équation du mouvement d'un SDOF sous une excitation sismique donnée,
considérant un comportement hystérétique est comme suit:
g
...
00
..x
m)x(F
x2x
où x est le déplacement latéral relatif de la masse par rapport au sol (pseudo-déplacement), g..x
l'accélération du sol, et m, 0et )x(F sont respectivement la masse, le rapport d'amortissement
visqueux et la force de rappel du système. La fréquence de vibration circulaire, 0 , est
donnée par:T2
mk 0
0
0k et T représentent la rigidité initiale et la période de vibration du système.

80
La réponse maximale du système en utilisant les méthodes de linéarisation équivalente, est
considérée approximativement par la réponse maximale du système linéaire équivalent où la
réponse eqx est calculée à l'aide de l'expression suivante:
g
..
eq2eqeq
.
eqeqeq
..xxx2x
eq et eq ,sont respectivement le rapport d'amortissement visqueux du système linéaire
équivalent (qui est toujours plus grand que celui du système original) et sa fréquence de
vibration circulaire. Cette dernière est donnée par:eq
seq T
2mk
sk est la rigidité sécante à déformation ultime et eqT est la période de vibration du système
équivalent. Pour un système bilinéaire (Figure 4.2) avec une réserve de rigidité (rk) après
fissuration, la relation entre la période de vibration du système équivalent et celle du système
initial est caractérisée comme suit:
rr1k
kT
T
s
0eq (4.1)
où est le facteur de ductilité de déplacement, défini comme étant le rapport du déplacement
absolu (ultime) et le déplacement lors du début d'écoulement avec
EIEI
r f , facteur
traduisant la chute de rigidité :
r = 0 modèle élasto-plastique; 100% de chute de rigidité
r 0 modèle bilinéaire chute de rigidité inférieure à 100%
Figure 4.2. Comportement d’un système élasto-plastique
y
u
yF
uF
rK
secK
K
F

81
Le rapport d'amortissement visqueux du système linéaire équivalent est donné de la même
manière par l'expression suivante:
2rr
1r1205.0
eff(4.2)
pour un système élastoplastique (r=0):
s
0eq
kk
T
T(4.3)
205.0
eff
1
1 (4.4)
Réponse aléatoire:
Utilisant un modèle hystérétique tiré d'une combinaison d'éléments élastiques en considérant
le glissement de Coulomb ensemble avec la conjugaison des résultats de l'analyse temporelle
(THA), Iwan tira des équations empiriques pour estimer les caractéristiques du système
équivalent.
939.0eq 1121.01T
T (4.5)
371.010587.005.0eff
(4.6)
La figure.4.3 montre que le coefficient amplificateur de périodeT
Teq utilisant la rigidité
sécante est plus grand que celui donné par Iwan, l'écart enregistré entre les 2 méthodes
augmente avec le niveau de ductilité .
Fig.4.3. Amplification de la période, méthodes de linéarisation

82
Modèles d'amortissement équivalent:
Le concept sur lequel s'articulent les méthodes de linéarisation équivalente est le rapport
d'amortissement visqueux équivalent d'où un déplacement de la période de vibration. Il a été
constaté par Jennings et Hadjian que si le principe d'égalité d'énergie dissipée est utilisé, les
différentes méthodes traitant ce changement de période sont la cause conduisant à plusieurs
rapports d'amortissement visqueux équivalent rencontrés dans la littérature. Il a été aussi
constaté, que pour un déplacement de période donné, le modèle hystérétique considéré influe
directement le rapport d'amortissement visqueux équivalent. Gulkan et Sozen ont constaté
qu'en général le déplacement résultant sous chargement sismique est beaucoup plus petit que
la réponse maximale c'est à dire que le rapport d'amortissement équivalent évalué à partir des
équations (4.2) ou (4.4) est surestimé. Se basant sur le modèle hystérétique de Takeda et sur le
data expérimental récolté à partir des essais de modèles réduits sur table vibrante, Gulkan et
Sozen développèrent l'équation empirique suivante:
112.005.0
eff(4.7)
qui sera ultérieurement étendue au MDOF (MDDL). Utilisant le concept de la rigidité sécante
à déplacement max combiné avec le modèle hystérétique de Takeda, Kowalsky recommande
pour l'évaluation du rapport d'amortissement équivalent l'équation générale suivante:
r
r11
105.0
eff(4.8)
qui sera pour un système à réserve de rigidité nulle (r=0),
11
105.0
eff(4.9)
Une deuxième équation illustrant le modèle d'amortissement équivalent a été aussi proposée
par Kowalsky et al et se base essentiellement sur des résultats expérimentaux avec ajustement
de courbe:
1139372.005.0
eff(4.10)
La figure 4.4 englobe les rapports d'amortissement équivalent normalisé pour les 4 méthodes.
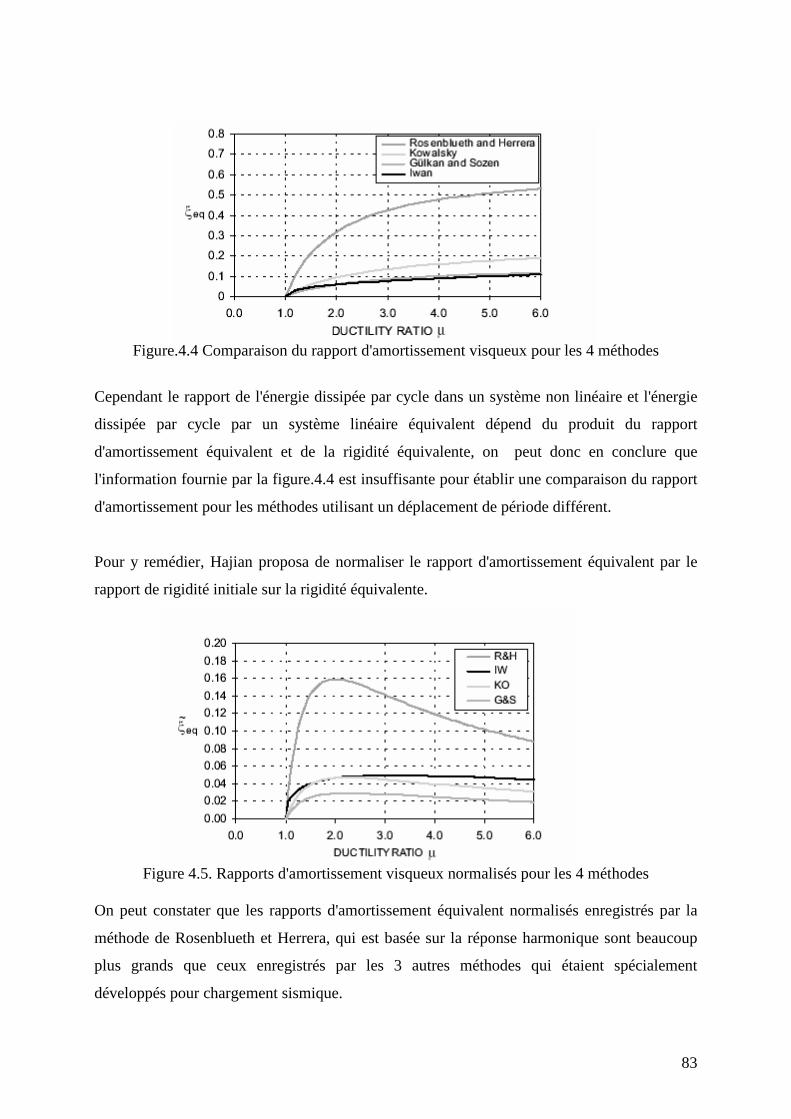
83
Figure.4.4 Comparaison du rapport d'amortissement visqueux pour les 4 méthodes
Cependant le rapport de l'énergie dissipée par cycle dans un système non linéaire et l'énergie
dissipée par cycle par un système linéaire équivalent dépend du produit du rapport
d'amortissement équivalent et de la rigidité équivalente, on peut donc en conclure que
l'information fournie par la figure.4.4 est insuffisante pour établir une comparaison du rapport
d'amortissement pour les méthodes utilisant un déplacement de période différent.
Pour y remédier, Hajian proposa de normaliser le rapport d'amortissement équivalent par le
rapport de rigidité initiale sur la rigidité équivalente.
Figure 4.5. Rapports d'amortissement visqueux normalisés pour les 4 méthodes
On peut constater que les rapports d'amortissement équivalent normalisés enregistrés par la
méthode de Rosenblueth et Herrera, qui est basée sur la réponse harmonique sont beaucoup
plus grands que ceux enregistrés par les 3 autres méthodes qui étaient spécialement
développés pour chargement sismique.
84
A travers une étude menée sur 6 méthodes approchées pour l'estimation du déplacement
maximal (demande) d'un système SDOF sur une plage de périodes variant entre 0.05s et 3.0s;
et sujet à 264 mouvements sismiques enregistrés sur des sols fermes, Miranda et Garcia [4]
ont établi les constations suivantes:
a- Du moment que les méthodes de Gulkan & Sozen, Iwan et Kowalsky donnent des
rapports d'amortissement équivalent plus petits que celui évalué par la méthode de
Rosenblueth et Herrera, elles produisent donc de meilleurs résultats. En général, l'erreur
relative moyenne enregistrée par ces méthodes, augmente proportionnellement avec
l'augmentation du coefficient de ductilité globale ( ), et la diminution de la période de
vibration. Elles produisent en général des résultats plus précis si les périodes
intermédiaires et longues sont considérées.
b- Pour les périodes courtes les méthodes de Gulkan-Sozen et Kowalsky surestiment le
déplacement max, cependant celle proposée par Iwan sous estime ce dernier spécialement
pour les périodes < 0.4s, mais conduit à une bonne estimation du déplacement max.
c- Le plus petit rapport d'amortissement équivalent normalisé est celui de la méthode Gulkan-
Sozen; cependant ceux enregistrés par la méthode de Kowalsky sont meilleurs en restant
relativement proches de ceux obtenus par la méthode de Iwan et ce, pour un 6 .
L'étude comparative de modèles d'amortissement effectifs menée par Qiang Xue [5] a permis
de conclure que pour les structures ayant un niveau de ductilité 4 , le modèle
d'amortissement basé sur l'approche combinée rigidité moyenne et méthode énergétique
présentée par Iwan et Gates donne les résultats les plus fiables. Cependant pour un 4
la méthode de Kowalsky reste la plus indiquée car elle produit l’erreur la plus faible.Les
auteurs ont pris dans leur étude les rapports d’amortissement équivalent suivants :
Kowalsky
1139372.005.0
eff
Iwan 371.010587.005.0eff
Gulkan Sozen
112.005.0
eff
85
Priestley
rr1
105.0
n
eff5.0n , 0r
11
105.0
eff
Reinhorn and Kunnath
rln1r1
1r12r32
31
r1
23
2320
2eff
0r
ln1
1231
23
220
2eff
4.1.2. Méthodes basées le facteur de modification de déplacement:
Dans ce second groupe de méthodes, la réponse maximale du système inélastique SDOF, i
est évaluée comme étant le produit de la déformation maximale ed'un système linéaire ayant
les mêmes rigidité latérale et coefficient d'amortissement que le système inélastique,
multipliée par un coefficient de modification de déplacement,C; d'où ei C .Newmark-Hall
proposent un coefficient de modification de déplacement C, fonction de la région spectrale,
où la période de vibration du système SDOF est localisée comme suit:
cn
cn'cn
c
'cnb
bna
an
TT1
TTTTT
TTT12
s125.0TTT12
s33/1TT
C
(4.11)
où: ab
anTTln2
TTln c'c T
12T
Miranda [4] a conduit une étude statistique sur les rapports des déformations inélastiques
maximales sur les déformations élastiques maximales (demandes),établis à partir
d’enregistrements de mouvements de sols fermes. Il a conclu que le rapport du déplacement
inélastique maximal sur le déplacement élastique maximal est peu influencé par l'intensité du
séisme ni par la position par rapport à sa source.
86
Il proposa l'équation suivante : 1
8.0.T12exp11
1C
(4.12)
4.2. Profile de déplacements
Il a été suggéré par Priestley [6] que le profile des déplacements lors du développement des
rotules plastiques dans les poutres (beam-sway), sous l'action d'un séisme sévère, peut prendre
approximativement une variation linéaire. L'allure des déplacements nonlinéaires des
portiques où le mécanisme plastique est gouverné par la rotulation des poutres (beam-sway
frames) est supposé être linéaire si n≤4 avec Heff = 0.67 Ht et parabolique si n≥20 avec Heff =
0.61 Ht, où Heff est la position de la masse vibrante effective. Entre 4 et 20 niveaux Heff est
supposée suivre une interpolation linéaire entre 0.67 Ht et 0.61 Ht du moment que la forme
linéaire pour 4 niveaux sera parabolique pour 20 niveaux et plus. Dans le but d'évaluer la
performance structurelle des systèmes conçus en portiques autostables, dimensionnés pour
différentes valeurs de R, Mitchell et Paultre [7] conduisent des analyses nonlinéaires avec
incrémentation de la force latérale en considérant deux cas de figure de distribution; linéaire
et nonlinéaire. La deuxième forme de distribution de la charge appliquée a été obtenue à
travers des combinaisons (racine carrée des sommes des carrés) de distributions résultantes
de l'analyse modale des structures. Le profile de déplacement linéaire a été trouvé sous
estimant légèrement l'effort tranchant à la base des portiques ductiles d'environ 4% s'ils
comportent 6 niveaux et 19% pour 12 niveaux); cependant le déplacement en tête est presque
le même; comparativement avec la répartition nonlinéaire.
4.3. Déplacement en tête
Dans la méthodologie en performance, les différents niveaux de performance pour une
structure sont définis fonction des limites du déplacement relatif limite de niveau [8]. Car les
limites basées sur le déplacement relatif limite de niveau sont facilement convertibles en
déplacement en tête, ce dernier peut être choisi sur la base du contrôle du déplacement relatif
limite de niveau afin de limiter l'endommagement non structural (maçonnerie, panneaux de
verre…). Considérant un profile de déplacement linéaire, conduit à un angle relatif de niveau
uniforme sur toute la hauteur du bâtiment,Hhhroof
s
storey
s
i1i
le déplacement
global Hh
Hs
storeyroof
. En utilisant la limite préconisée par le code RPA
( storeystorey h%1 ), le déplacement en tête sera: H%1roof

87
4.4. Considération pratique:
En considérant la flexibilité de la structure exprimée à travers le déplacement relatif de niveau
pour un chargement égal à la résistance parasismique requise Kappos et al [9] proposent les
valeurs suivantes :
- sh%5.11 considérant la déformation de la structure
- sh%75.07.0 considérant la déformation limite du système de remplissage
L'EC8 [10] recommande les valeurs suivantes fonction du facteur d'importance de catégorieν.
5.2 , catégories I-II correspondant respectivement aux catégories 1A-1B du code RPA
2 , catégories III-IV correspondant respectivement aux catégories 2-3 du code RPA
- bâtiment ayant l'élément non structurel en matériau fragile, solidaire de la structure
sh004.0 ss h010.0h008.0
- bâtiment ayant l'élément non structurel fixé de façon qu'il ne puisse pas interférer sur les
déformations de la structure : sh006.0 ss h015.0h012.0
4.5.Procédures d’évaluation de la période max Tmax
4.5.1 Procédure 1
La dissipation d'énergie requise implique un comportement hystérétique, donc un
amortissement hystérétique différent de zéro d'où un taux d'amortissement global visqueux
équivalent eq . Le niveau de ductilité global attribuable doit être concordant avec le coefficient
réducteur de la force élastiqueQR
R , et il est défini à l'aide de formulations universellement
reconnues (N-H, V-F-F, Krawinkler-Nasser…).

88
Newmark-Hall:
cn
cn'cc
n
'cnb
bna2
an
y
TT
TTTTT
TTT12
TTT12
TT1
R
(4.13)
cny
cn'cyn
c
'cnb
2y
bna
2
y
an
TTR
TTTRTT
TTT2
R1
TTT2
R1
TTindéfini
(4.14)
ab
anTTln
TTln
Vidic-Fajfar&Fishinger:
0n95.0
0n0
n95.0
y
TT1)1(35.1
TT1TT
)1(35.1R
(4.15)
0n053.1
y
0n
053.1
n
oy
TT1R74.01
TTTT
1R74.01
(4.16)
Krawinkler-Nasser:
c1
y 1)1(cR (4.17)
nan
an
n Tb
T1
T),T(c
42.0b;1a
)1R(c1
1 cy (4.18)
Le taux d'amortissement équivalent du système structurel dissipatif d'énergie est lui aussi
estimé à l'aide de formulations empiriques développées à partir de la technique de
linéarisation équivalente (Iwan, Kowalsky,...). Cette linéarisation équivalente est caractérisée
par ses paramètres d'équivalence à savoir la période équivalente eqT et le taux d'amortissement
équivalent eq ; induits par le niveau de ductilité concordant avec le facteur réducteur de la
force élastique R . La formulation de ces paramètres est de la forme:
)T,R(f n neqeq TCT (4.19)
)(feq )(fCeq
89
Le calcul est généralement basé sur un spectre d'accélération ayant un rapport
d'amortissement égal à 5%, fonction du sol d'assise, en imposant un déplacement global en
tête (global drift = 1%H) correspondant à une période de vibration équivalente Tmax
(concordante à ce déplacement imposé), différente de la période de vibration résultante de la
rigidité de coffrage (élastique) du système structurel.
L'estimation de cette période (Tmax) sera fixée après détermination des caractéristiques ou
paramètres du système élastiquement équivalent à savoir: eqeq T, . La correction sera apportée
en estimant le déplacement résultant eq en tenant compte du nouveau taux d'amortissement
équivalent eq fonction du déplacement présumé, ),(f eqprésuméeq .
La période du système linéairement équivalent sera: eqeq 2T (4.20) avec
présumé
eq ;
eteq2
7
défini comme facteur permettant la correction du déplacement imposé
(enregistré sur le spectre à 5% d'amortissement, rapporté sur le spectre correspondant au taux
d'amortissement équivalent eq ). La correction du spectre s'impose car l'accélération spectrale
correspondante au nouveau taux l'amortissement eq sera inférieure à celle initialement
présumée ( 05.0 ).
Le déplacement global imposé invoquera nécessairement une période de vibration ( maxT )
concordante avec ce dernier: maxeqeq T.CT . Cette nouvelle période de vibration s'écarte
toujours de la période naturelle résultante de la rigidité élastique du système structurel
considéré. Comme le système linéaire équivalent n'admet qu'une seule période de vibration on
aura donc maxeqeq T.CT eq2 et maxT sera la période maximale à ne pas dépasser afin de
satisfaire le déplacement global tolérable, d'où:
eq
eqmax C
TT (4.21)
Le coefficient d'amplification de la période élastique nT sera:n
max
T
T
ou encore :neq
eq
n
max
T.C
2
TT
(4.22)
90
en remplaçant eq par sa valeur l 'équation (4.22) sera:
neq
présumé
T.C
2
(4.23)
Choix de la méthode et du rapport d'amortissement équivalent à adopter pour l'étude:
Comme il a été précédemment constaté que les méthodes basées sur la rigidité sécante ne
sont pas aussi précises que celle proposée par Iwan et Gates; c’est cette dernière qui sera donc
adoptée pour l'étude. Concernant le rapport d'amortissement équivalent: )(feq ; et sur la
base des constatations suivantes :
a- les recommandations préconisées par le code RPA99 relatives aux aciers s'accordent avec
une classe de ductilité moyenne [11] c'est à dire pour un niveau de ductilité global voisin
de 4, 4 La formulation proposée par Iwan s'avère donc la plus appropriée.
b- Miranda et al ont constaté que pour des périodes inférieures à 0.4s, la méthode de Iwan
donne une bonne estimation du déplacement maximal.
c- pour des niveaux de ductilité 6 , les résultats obtenus à partir de la formulation
proposée par Kowalsky sont meilleurs et restent proches de ceux obtenus par Iwan.
Les formulations de Iwan et Kowalsky sur le rapport d'amortissement équivalent eq sont
retenues pour la suite de l'étude en prenant en considération les points suivants:
- 4 371.010587.005.0eff
Iwan
- 4
1139372.005.0
effKowalsky

91
Les principales étapes à suivre pour déterminer la période élastique pour un système structurel
donné sont :
le facteur de comportement global R est sélectionné fonction du système structurel choisi
le facteur de qualité Q est fixé fonction du niveau de contrôle désiré
le niveau de ductilité )T,R(f n attribuable au facteurQR
R , est déterminé en
exploitant les relations établies par Newmark-Hall, Vidic-Fajfar-Fishinger, Krawinkler-
Nasser…
les caractéristiques du système élastiquement équivalents seront évalués comme suit :
- )(fCeq ;
- )(feq en considérant 2 cases pour :
- 4 371.010587.005.0eff
Iwan
- 4
1139372.005.0
effKowalsky
déterminereq2
7
pour évaluerneq
eq
n
max
T.C
2
TT
neq
présumé
T.C
2
4.5.2 Procédure 2
L’évaluation de la réponse inélastique structurelle est conduite à l’aide des méthodes basées
sur le facteur de modification de déplacement en exploitant les relations Newmark et Hall,
Krawinkler-Nasser pour déterminer le niveau de ductilité concordant )T,R(f n avec le
facteur réducteur de la réponse sismique. Déterminer ensuite la réponse maximale du système
inélastique en exploitant simultanément les relations relatives au coefficient modificateur de
déplacement C= f(µ) précédemment citées (eq. 4.11 et 4.12). Les principales étapes à suivre
pour déterminer la période élastique pour un système structurel donné sont :
le facteur de comportement global R est sélectionné fonction du système structurel choisi
le facteur de qualité Q est fixé fonction du niveau de contrôle désiré
le niveau de ductilité )T,R(f n attribuable au facteurQR
R , est déterminé en
exploitant les relations établies par Newmark et Hall, Krawinkler-Nasser .

92
le coefficient de modification de déplacement, C= f(µ) est alors déterminé en exploitant
respectivement les relations de Newmark-Hall et Miranda-Garcia :
edrifti .C d'oùCdrift
e
le coefficient d'amplification de la période élastique sera:
CT2
T
2
TT drift
nn
e
n
max
4.6. Illustration pratique
Bâtiments réguliers en plan et en élévation contreventés par portiques autostables sont
examinés en considérant les types de structures suivantes :
Structure A: portiques nus; 075.0C;5R T
Structure B: portiques avec maçonnerie rigide non participante; 050.0C;5R T
Structure C: portiques avec maçonnerie rigide participante; 050.0C;5.3R T
Data : hauteur d'étage est constante m3h , n3nhH 74n c'est à dire (R+3 à R+6)
Conformément au code RPA 99 :
- la période élastique est donnée par : 43
Tn HCT (4.24)
- le facteur de qualité Q=1.2 ; le contrôle sur la qualité est non observé
- la période caractéristique T0 = 0.3s, 0.4s, 0.7s respectivement pour un site rocheux (S1),
ferme (S2) et très meuble (S4).
n3H hauteur d'étage constante m3h , 74n c'est à dire (R+3 à R+6)
Comme ces structures sont supposées s'incurser dans le domaine post-élastique afin de
dissiper l'énergie sismique, elles doivent donc disposer d'un certain niveau de ductilité global
caractérisé par le coefficient de ductilité déplacement .
Procédure 1
La variation du facteur d’amplification de la période α est étudié en prenant en compte
l’influence l’effet de site en premier lieu à travers les expressions Rμ-μ-Tn de Newmark-Hall
and Vidic-Fajfar-Fishinger. Les tableaux ci-dessous regroupent les différents résultats obtenus
pour différents sites considérés et ce pour les 3 types de systèmes structurels.
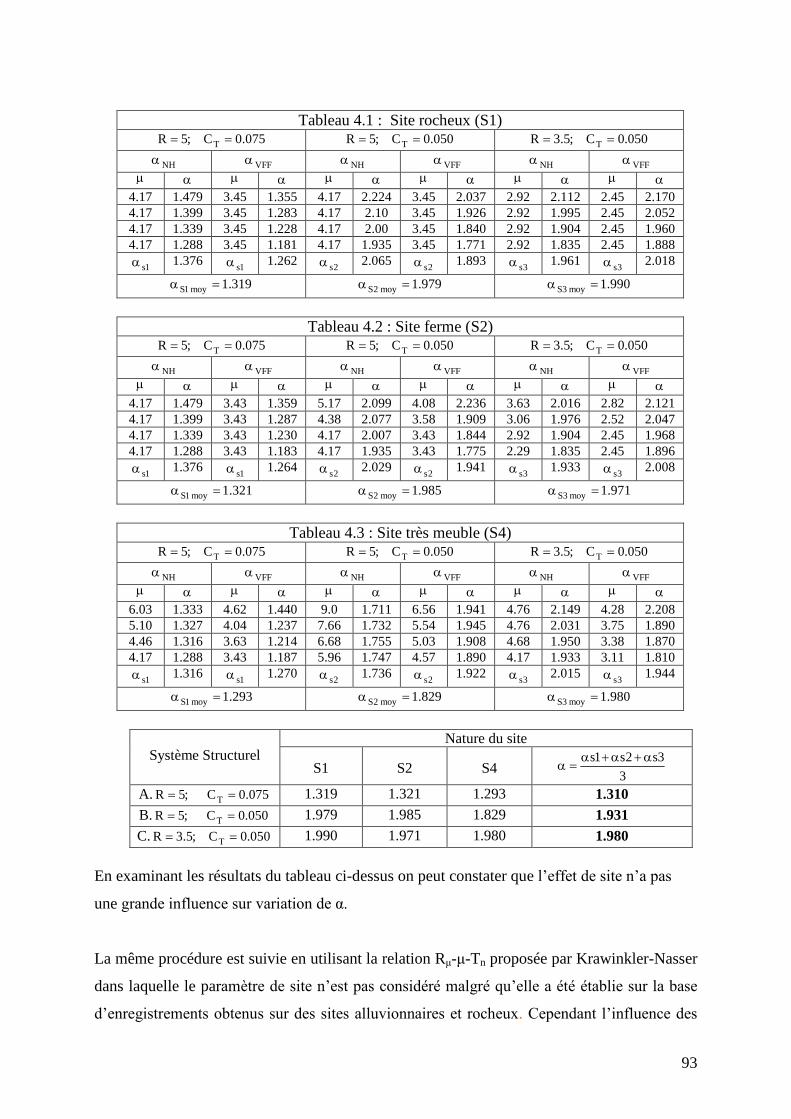
93
Tableau 4.1 : Site rocheux (S1)075.0C;5R T 050.0C;5R T 050.0C;5.3R T
NH VFF NH VFF NH VFF
4.17 1.479 3.45 1.355 4.17 2.224 3.45 2.037 2.92 2.112 2.45 2.1704.17 1.399 3.45 1.283 4.17 2.10 3.45 1.926 2.92 1.995 2.45 2.0524.17 1.339 3.45 1.228 4.17 2.00 3.45 1.840 2.92 1.904 2.45 1.9604.17 1.288 3.45 1.181 4.17 1.935 3.45 1.771 2.92 1.835 2.45 1.888
1s 1.376 1s 1.262 2s 2.065 2s 1.893 3s 1.961 3s 2.018
319.1moy1S 979.1moy2S 990.1moy3S
Tableau 4.2 : Site ferme (S2)075.0C;5R T 050.0C;5R T 050.0C;5.3R T
NH VFF NH VFF NH VFF
4.17 1.479 3.43 1.359 5.17 2.099 4.08 2.236 3.63 2.016 2.82 2.1214.17 1.399 3.43 1.287 4.38 2.077 3.58 1.909 3.06 1.976 2.52 2.0474.17 1.339 3.43 1.230 4.17 2.007 3.43 1.844 2.92 1.904 2.45 1.9684.17 1.288 3.43 1.183 4.17 1.935 3.43 1.775 2.29 1.835 2.45 1.896
1s 1.376 1s 1.264 2s 2.029 2s 1.941 3s 1.933 3s 2.008
321.1moy1S 985.1moy2S 971.1moy3S
Tableau 4.3 : Site très meuble (S4)075.0C;5R T 050.0C;5R T 050.0C;5.3R T
NH VFF NH VFF NH VFF
6.03 1.333 4.62 1.440 9.0 1.711 6.56 1.941 4.76 2.149 4.28 2.2085.10 1.327 4.04 1.237 7.66 1.732 5.54 1.945 4.76 2.031 3.75 1.8904.46 1.316 3.63 1.214 6.68 1.755 5.03 1.908 4.68 1.950 3.38 1.8704.17 1.288 3.43 1.187 5.96 1.747 4.57 1.890 4.17 1.933 3.11 1.810
1s 1.316 1s 1.270 2s 1.736 2s 1.922 3s 2.015 3s 1.944
293.1moy1S 829.1moy2S 980.1moy3S
Nature du siteSystème Structurel
S1 S2 S4 33s2s1s
A. 075.0C;5R T 1.319 1.321 1.293 1.310B. 050.0C;5R T 1.979 1.985 1.829 1.931C. 050.0C;5.3R T 1.990 1.971 1.980 1.980
En examinant les résultats du tableau ci-dessus on peut constater que l’effet de site n’a pas
une grande influence sur variation de α.
La même procédure est suivie en utilisant la relation Rμ-μ-Tn proposée par Krawinkler-Nasser
dans laquelle le paramètre de site n’est pas considéré malgré qu’elle a été établie sur la base
d’enregistrements obtenus sur des sites alluvionnaires et rocheux. Cependant l’influence des
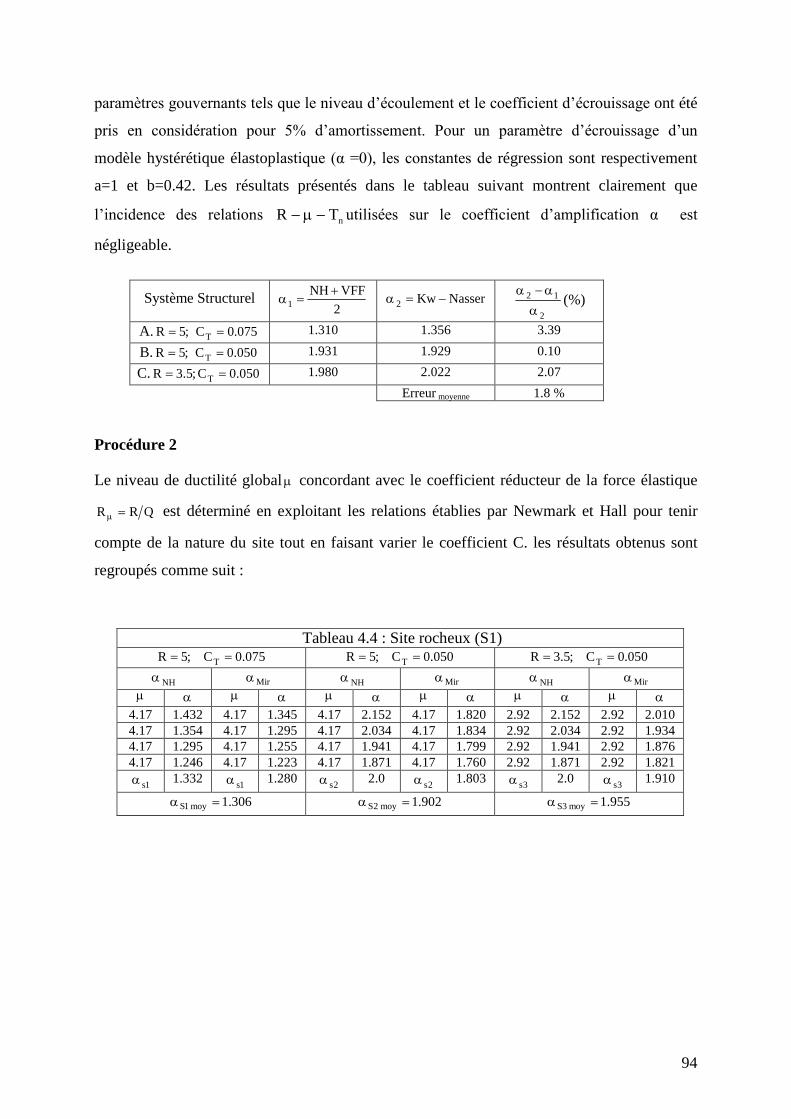
94
paramètres gouvernants tels que le niveau d’écoulementet le coefficient d’écrouissageont été
pris en considération pour 5% d’amortissement. Pour un paramètre d’écrouissage d’un
modèle hystérétique élastoplastique (α =0), les constantes de régression sont respectivement
a=1 et b=0.42. Les résultats présentés dans le tableau suivant montrent clairement que
l’incidence des relations nTR utilisées sur le coefficient d’amplification α est
négligeable.
Système Structurel2
VFFNH1
NasserKw2
2
12
(%)
A. 075.0C;5R T 1.310 1.356 3.39
B. 050.0C;5R T 1.931 1.929 0.10
C. 050.0C;5.3R T 1.980 2.022 2.07
Erreur moyenne 1.8 %
Procédure 2
Le niveau de ductilité globalconcordant avec le coefficient réducteur de la force élastique
QRR est déterminé en exploitant les relations établies par Newmark et Hall pour tenir
compte de la nature du site tout en faisant varier le coefficient C. les résultats obtenus sont
regroupés comme suit :
Tableau 4.4 : Site rocheux (S1)075.0C;5R T 050.0C;5R T 050.0C;5.3R T
NH Mir NH Mir NH Mir
4.17 1.432 4.17 1.345 4.17 2.152 4.17 1.820 2.92 2.152 2.92 2.0104.17 1.354 4.17 1.295 4.17 2.034 4.17 1.834 2.92 2.034 2.92 1.9344.17 1.295 4.17 1.255 4.17 1.941 4.17 1.799 2.92 1.941 2.92 1.8764.17 1.246 4.17 1.223 4.17 1.871 4.17 1.760 2.92 1.871 2.92 1.821
1s 1.332 1s 1.280 2s 2.0 2s 1.803 3s 2.0 3s 1.910
306.1moy1S 902.1moy2S 955.1moy3S
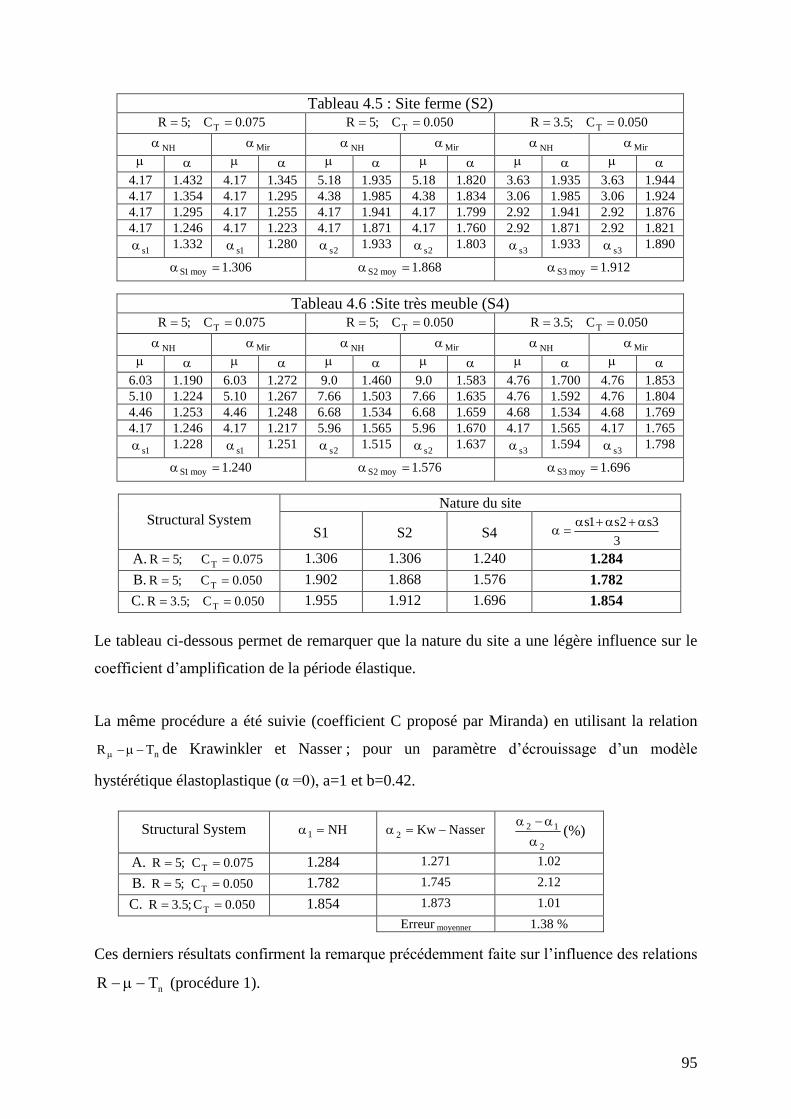
95
Tableau 4.5 : Site ferme (S2)075.0C;5R T 050.0C;5R T 050.0C;5.3R T
NH Mir NH Mir NH Mir
4.17 1.432 4.17 1.345 5.18 1.935 5.18 1.820 3.63 1.935 3.63 1.9444.17 1.354 4.17 1.295 4.38 1.985 4.38 1.834 3.06 1.985 3.06 1.9244.17 1.295 4.17 1.255 4.17 1.941 4.17 1.799 2.92 1.941 2.92 1.8764.17 1.246 4.17 1.223 4.17 1.871 4.17 1.760 2.92 1.871 2.92 1.821
1s 1.332 1s 1.280 2s 1.933 2s 1.803 3s 1.933 3s 1.890
306.1moy1S 868.1moy2S 912.1moy3S
Tableau 4.6 :Site très meuble (S4)075.0C;5R T 050.0C;5R T 050.0C;5.3R T
NH Mir NH Mir NH Mir
6.03 1.190 6.03 1.272 9.0 1.460 9.0 1.583 4.76 1.700 4.76 1.8535.10 1.224 5.10 1.267 7.66 1.503 7.66 1.635 4.76 1.592 4.76 1.8044.46 1.253 4.46 1.248 6.68 1.534 6.68 1.659 4.68 1.534 4.68 1.7694.17 1.246 4.17 1.217 5.96 1.565 5.96 1.670 4.17 1.565 4.17 1.765
1s 1.228 1s 1.251 2s 1.515 2s 1.637 3s 1.594 3s 1.798
240.1moy1S 576.1moy2S 696.1moy3S
Nature du siteStructural System
S1 S2 S4 33s2s1s
A. 075.0C;5R T 1.306 1.306 1.240 1.284B. 050.0C;5R T 1.902 1.868 1.576 1.782C. 050.0C;5.3R T 1.955 1.912 1.696 1.854
Le tableau ci-dessous permet de remarquer que la nature du site a une légère influence sur le
coefficient d’amplification de la période élastique.
La même procédure a été suivie (coefficient C proposé par Miranda) en utilisant la relation
nTR de Krawinkler et Nasser ; pour un paramètre d’écrouissage d’un modèle
hystérétique élastoplastique (α =0),a=1 et b=0.42.
Structural System NH1 NasserKw2 2
12
(%)
A. 075.0C;5R T 1.284 1.271 1.02
B. 050.0C;5R T 1.782 1.745 2.12
C. 050.0C;5.3R T 1.854 1.873 1.01
Erreur moyenner 1.38 %
Ces derniers résultatsconfirment la remarque précédemment faite sur l’influence des relations
nTR (procédure 1).
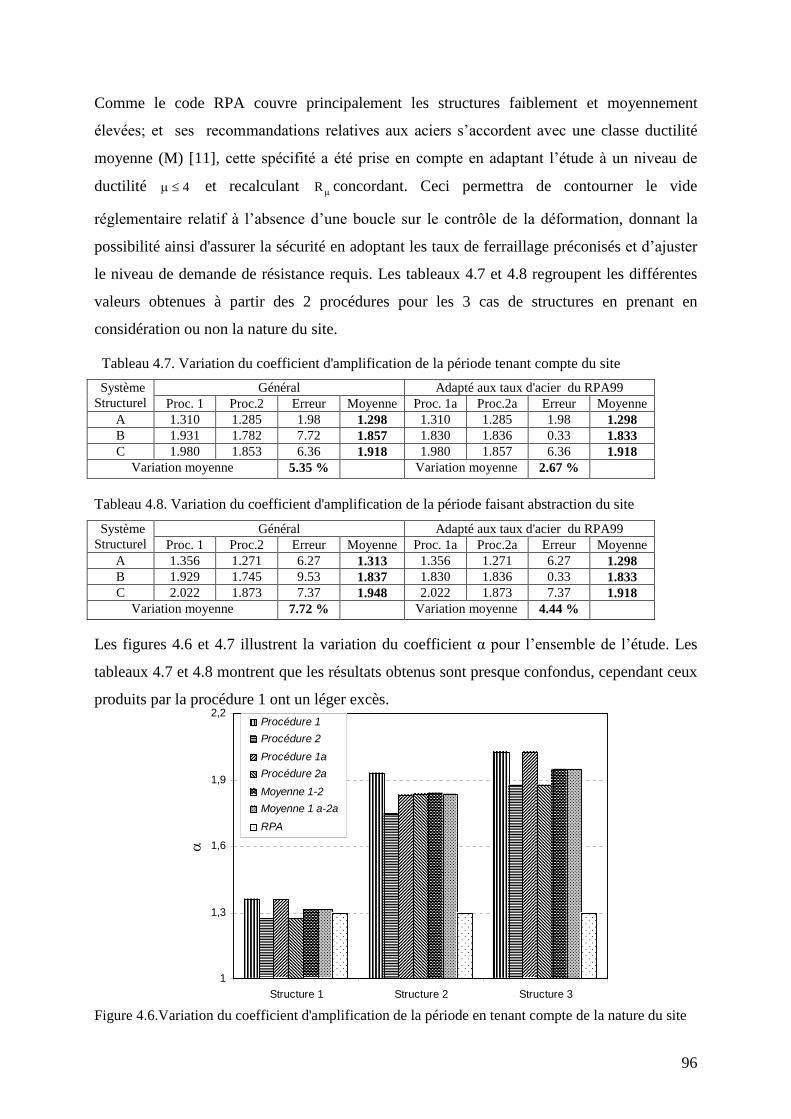
96
Comme le code RPA couvre principalement les structures faiblement et moyennement
élevées; et ses recommandations relatives aux aciers s’accordent avec uneclasse ductilité
moyenne (M) [11], cette spécifité a été prise en compte en adaptant l’étude à un niveau de
ductilité 4 et recalculant R concordant. Ceci permettra de contourner le vide
réglementaire relatif à l’absence d’une boucle sur le contrôle de la déformation, donnant la
possibilité ainsi d'assurer la sécurité en adoptant les taux de ferraillage préconisés et d’ajuster
le niveau de demande de résistance requis. Les tableaux 4.7 et 4.8 regroupent les différentes
valeurs obtenues à partir des 2 procédures pour les 3 cas de structures en prenant en
considération ou non la nature du site.
Tableau 4.7. Variation du coefficient d'amplification de la période tenant compte du site
Général Adapté aux taux d'acier du RPA99SystèmeStructurel Proc. 1 Proc.2 Erreur Moyenne Proc. 1a Proc.2a Erreur Moyenne
A 1.310 1.285 1.98 1.298 1.310 1.285 1.98 1.298B 1.931 1.782 7.72 1.857 1.830 1.836 0.33 1.833C 1.980 1.853 6.36 1.918 1.980 1.857 6.36 1.918
Variation moyenne 5.35 % Variation moyenne 2.67 %
Tableau 4.8. Variation du coefficient d'amplification de la période faisant abstraction du site
Général Adapté aux taux d'acier du RPA99SystèmeStructurel Proc. 1 Proc.2 Erreur Moyenne Proc. 1a Proc.2a Erreur Moyenne
A 1.356 1.271 6.27 1.313 1.356 1.271 6.27 1.298B 1.929 1.745 9.53 1.837 1.830 1.836 0.33 1.833C 2.022 1.873 7.37 1.948 2.022 1.873 7.37 1.918
Variation moyenne 7.72 % Variation moyenne 4.44 %
Les figures 4.6 et 4.7 illustrent la variation du coefficient α pour l’ensemble de l’étude. Les
tableaux 4.7 et 4.8 montrent que les résultats obtenus sont presque confondus, cependant ceux
produits par la procédure 1 ont un léger excès.
Figure 4.6.Variation du coefficient d'amplification de la période en tenant compte de la nature du site
1
1,3
1,6
1,9
2,2
Structure 1 Structure 2 Structure 3
α
Procédure 1
Procédure 2
Procédure 1a
Procédure 2a
Moyenne 1-2
Moyenne 1 a-2a
RPA

97
Figure 4.7.Variation du coefficient d'amplification de la période en faisant abstraction au site
Se référant aux valeurs moyennes du coefficient on peut recommander les valeurs
suivantes:
1. Structure A (portique avec maçonnerie) nmax T30.1T
2. Structure B (portique avec maçonnerie non participante) nmax T80.1T
3. Structure C (portique avec maçonnerie participante) nmax T90.1T
Il s’avère par ailleurs plus raisonnable de réduire le déplacement relatif de niveau, lorsque la
structure avec maçonnerie participante est envisagée afin de limiter l’endommagement non
structurel; sh%7.0 , et maxT sera donc: nnmax T60.17.0T9.1T
4.6 Conclusions
La procédure d’évaluation de la période proposée dans cette partie pourra servir d’outil de
contrôle sur le comportement global, en garantissant une capacité de résistance minimale
requise, concordante avec un niveau de déformation tolérable nécessaire pour le contrôle de
l’endommagement structurel. La possibilité d’ajustement des niveaux de performance est
introduite en guise de flexibilité permettant au concepteur de se prémunir au préalable contre
un éventuel dépassement d’une capacité de déformation. Cette alternative contribuera
inévitablement à l’amélioration de la sécurité tout en limitant l’endommagement résultant.
L'étude a porté sur trois cas de structures en portiques autostables tout en considérant la
spécifité du sol d'assise.
1
1,3
1,6
1,9
2,2
Structure 1 Structure 2 Structure 3
α
Procédure 1
Procédure 2
Procédure 1a
Procédure 2a
Moyenne 1-2
Moyenne 1a-2a
RPA
98
Considérant les différents résultats obtenus, on peut constater que la limite préconisée par le
code Algérien nitelim T30.1T ne s'accorde que pour les structures nues. Cependant si le
remplissage est en maçonnerie rigide cette limite s'avère très restrictive.
Références
1- RPA99 Règles Parasismiques Algériennes,CGS Jan.2000
2- R.Bertero, V.Bertero ‘Performance-Based Seismic Engineering’ Earthquake Engineering and
Structural Dynamics. 2002; 31:627-652.
3- A.K.Chopra, R.K.Goel, 'Capacity-demand-diagram methods for estimating seismic
deformation of inelastic structures: SDF systems'. Report N° PEER-1999/02.
4- E.Miranda, J.Ruiz-Garcia 'Evaluation of approximate methods to estimate maximum inelastic
displacement demands'. Earthquake Engineering and Structural Dynamics 2002; 31:539-560
5- Q.Xue, 'Assessing the accuracy of the damping models used in displacement based seismic
demand evaluation and design of inelastic structures' Earthquake Engineering and
Engineering Seismology, Vol.3, N° 2 37-45.
6- S.M.Glaister, 'Development of a simplified deformation based method for seismic
vulnerability assessment' Master's dissertation April 2002. European school of advanced
studies in reduction of seismic risk; Rose school, Universita degli studi di Pavia, Italy.
7- D.Mitchell-P Paultre, 'Ductility and overstrength in seismic design of reinforced concrete
structures’ Canadian Journal of Civil Engineering, Vol.21 1994 pp 1049-1060
8- SEAOC. Vision 2000, Performance based seismic engineering buildings, vols.I and II:
Conceptual framework. Structural Engineers Association of California,1995
9- G.G.Penelis, A.J.Kappos ’Earthquake-Resistant Concrete Structures’, E& FN Spon, 1997.
10- Eurocode 8: Earthquake resistant design of structures 1995
11- N.Djebbar, B.Bousalem, N.Chikh, 'Notions de comportement global-local dans la
performance parasismique des portiques en béton'. Revue Sciences & Technologie N°20-
Dec.2003 pp 63-69.

99
Annexe Chapitre 4
Procédure 1
1- type de structure, R2- niveau de qualité guaranti, Q
3-QR
R
4- Tn (RPA99)5- nT,Rf concordant équation (Krawinkler-Nasser)6- test sur µ ( 4 ; calculer R concordant à 4 ) en d'autres termes réduire
R augmentant ainsi la force de calcul
RF
F ecalcul
7- )T,(f neq Iwan)T,(fC neq Iwan
8- drift tolérable ; d'où Tmax tolérable ou Tlimite
9- test sur le coffrage adopté
Tstructure≤ Tlimite OK! Step 10Non! Revoir le coffrage
10- M,N,T; Capacité de Résistance11- ; Capacité de Déformation
Procédure 2
1- type de structure, R2- niveau de qualité guaranti, Q
3-QR
R
4- Tn (RPA99)5- nT,Rf concordant équation (Krawinkler-Nasser)6- test sur µ ( 4 ; calculer R concordant à 4 ) en d'autres termes réduire
R augmentant ainsi la force de calcul
RF
F ecalcul
7- C : Miranda8- drift tolérable ; d'où Tmax tolérable ou Tlimite
9- test sur le coffrage adopté
Tstructure≤ Tlimite OK! Step 10Non! Revoir le coffrage
10- M,N,T; Capacité de Résistance11- ; Capacité de Déformation
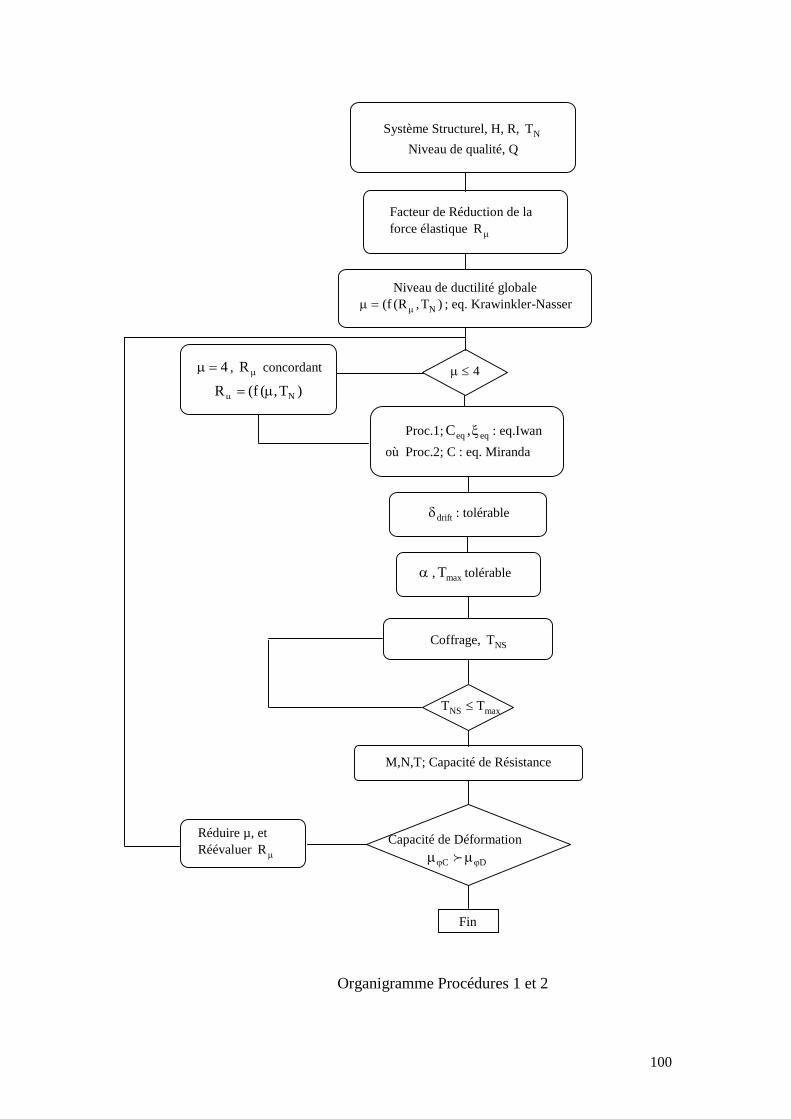
100
Système Structurel, H, R, NT
Niveau de qualité, Q
Facteur de Réduction de laforce élastique R
Coffrage, NST
maxNS TT
M,N,T; Capacité de Résistance
Capacité de Déformation
DC
Fin
Niveau de ductilité globale)T,R(f( N ; eq. Krawinkler-Nasser
4
Proc.1; eqeq ,C : eq.Iwan
où Proc.2; C : eq. Miranda
Réduire µ, etRéévaluer R
4 , R concordant
)T,(f(R N
, maxT tolérable
drift : tolérable
Organigramme Procédures 1 et 2
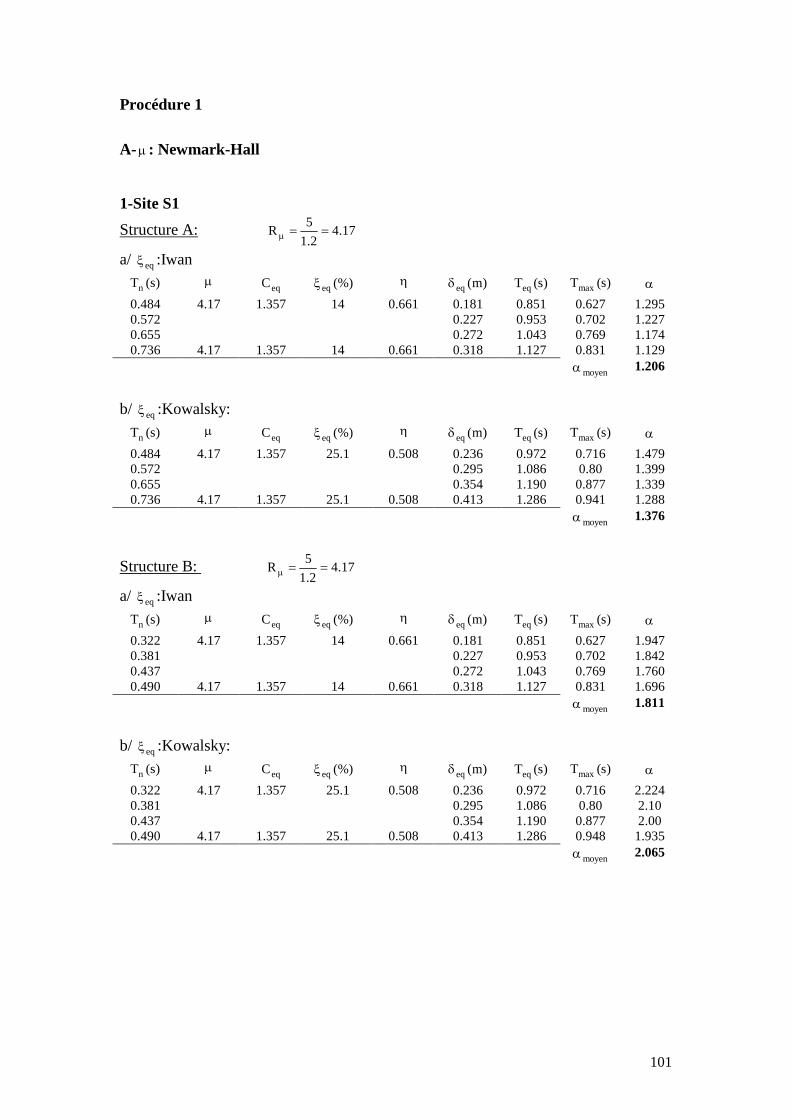
101
Procédure 1
A-: Newmark-Hall
1-Site S1
Structure A: 17.42.1
5R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 4.17 1.357 14 0.661 0.181 0.851 0.627 1.2950.572 0.227 0.953 0.702 1.2270.655 0.272 1.043 0.769 1.1740.736 4.17 1.357 14 0.661 0.318 1.127 0.831 1.129
moyen 1.206
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 4.17 1.357 25.1 0.508 0.236 0.972 0.716 1.4790.572 0.295 1.086 0.80 1.3990.655 0.354 1.190 0.877 1.3390.736 4.17 1.357 25.1 0.508 0.413 1.286 0.941 1.288
moyen 1.376
Structure B: 17.42.1
5R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 4.17 1.357 14 0.661 0.181 0.851 0.627 1.9470.381 0.227 0.953 0.702 1.8420.437 0.272 1.043 0.769 1.7600.490 4.17 1.357 14 0.661 0.318 1.127 0.831 1.696
moyen 1.811
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 4.17 1.357 25.1 0.508 0.236 0.972 0.716 2.2240.381 0.295 1.086 0.80 2.100.437 0.354 1.190 0.877 2.000.490 4.17 1.357 25.1 0.508 0.413 1.286 0.948 1.935
moyen 2.065
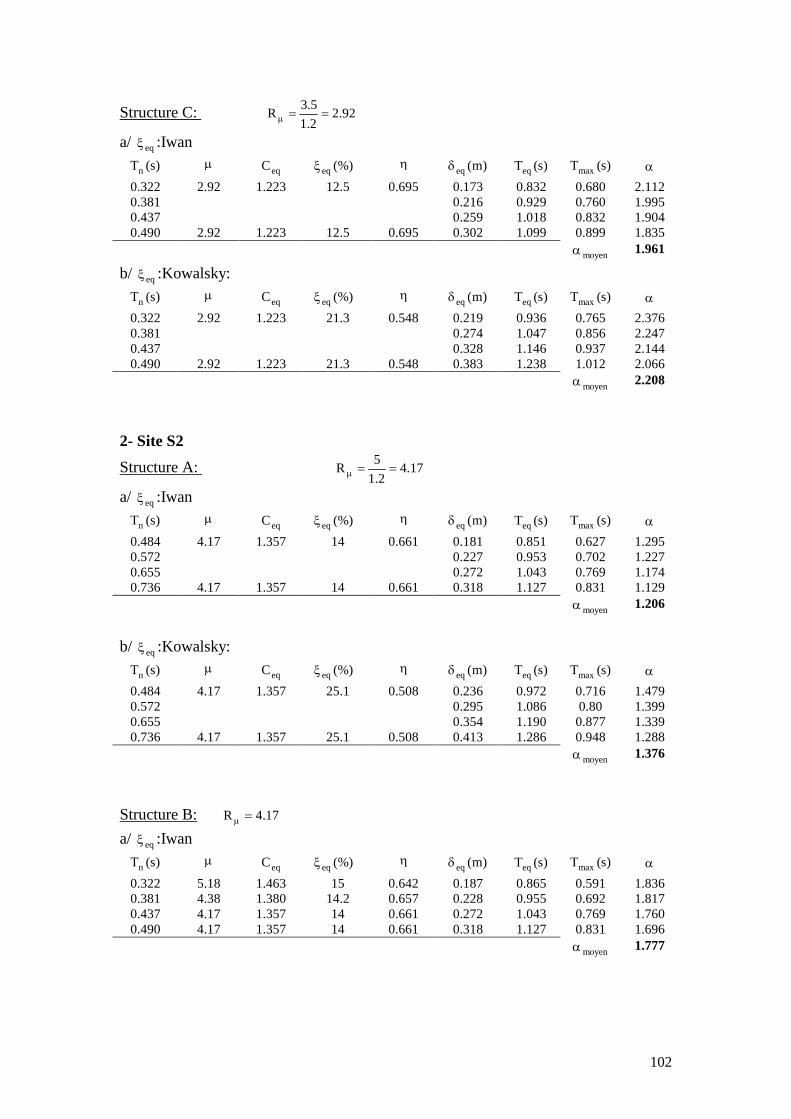
102
Structure C: 92.22.15.3
R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 2.92 1.223 12.5 0.695 0.173 0.832 0.680 2.1120.381 0.216 0.929 0.760 1.9950.437 0.259 1.018 0.832 1.9040.490 2.92 1.223 12.5 0.695 0.302 1.099 0.899 1.835
moyen 1.961
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 2.92 1.223 21.3 0.548 0.219 0.936 0.765 2.3760.381 0.274 1.047 0.856 2.2470.437 0.328 1.146 0.937 2.1440.490 2.92 1.223 21.3 0.548 0.383 1.238 1.012 2.066
moyen 2.208
2- Site S2
Structure A: 17.42.1
5R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 4.17 1.357 14 0.661 0.181 0.851 0.627 1.2950.572 0.227 0.953 0.702 1.2270.655 0.272 1.043 0.769 1.1740.736 4.17 1.357 14 0.661 0.318 1.127 0.831 1.129
moyen 1.206
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 4.17 1.357 25.1 0.508 0.236 0.972 0.716 1.4790.572 0.295 1.086 0.80 1.3990.655 0.354 1.190 0.877 1.3390.736 4.17 1.357 25.1 0.508 0.413 1.286 0.948 1.288
moyen 1.376
Structure B: 17.4R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 5.18 1.463 15 0.642 0.187 0.865 0.591 1.8360.381 4.38 1.380 14.2 0.657 0.228 0.955 0.692 1.8170.437 4.17 1.357 14 0.661 0.272 1.043 0.769 1.7600.490 4.17 1.357 14 0.661 0.318 1.127 0.831 1.696
moyen 1.777
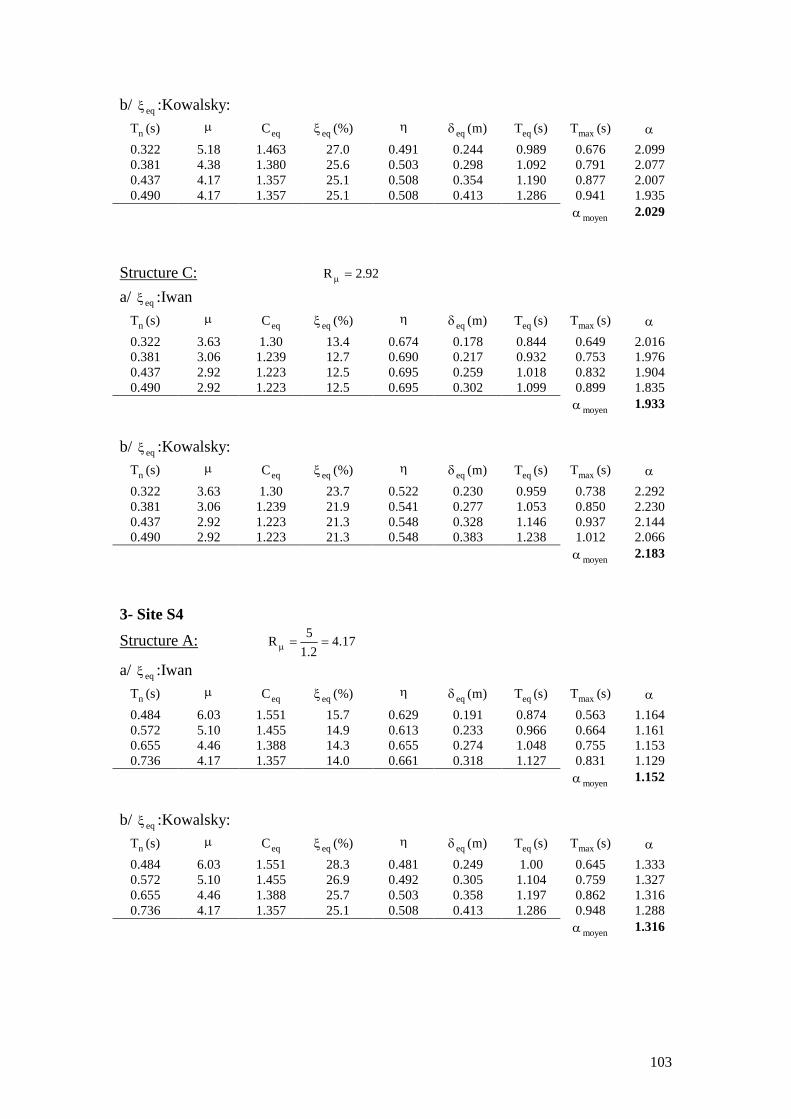
103
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 5.18 1.463 27.0 0.491 0.244 0.989 0.676 2.0990.381 4.38 1.380 25.6 0.503 0.298 1.092 0.791 2.0770.437 4.17 1.357 25.1 0.508 0.354 1.190 0.877 2.0070.490 4.17 1.357 25.1 0.508 0.413 1.286 0.941 1.935
moyen 2.029
Structure C: 92.2R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 3.63 1.30 13.4 0.674 0.178 0.844 0.649 2.0160.381 3.06 1.239 12.7 0.690 0.217 0.932 0.753 1.9760.437 2.92 1.223 12.5 0.695 0.259 1.018 0.832 1.9040.490 2.92 1.223 12.5 0.695 0.302 1.099 0.899 1.835
moyen 1.933
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 3.63 1.30 23.7 0.522 0.230 0.959 0.738 2.2920.381 3.06 1.239 21.9 0.541 0.277 1.053 0.850 2.2300.437 2.92 1.223 21.3 0.548 0.328 1.146 0.937 2.1440.490 2.92 1.223 21.3 0.548 0.383 1.238 1.012 2.066
moyen 2.183
3- Site S4
Structure A: 17.42.1
5R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 6.03 1.551 15.7 0.629 0.191 0.874 0.563 1.1640.572 5.10 1.455 14.9 0.613 0.233 0.966 0.664 1.1610.655 4.46 1.388 14.3 0.655 0.274 1.048 0.755 1.1530.736 4.17 1.357 14.0 0.661 0.318 1.127 0.831 1.129
moyen 1.152
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 6.03 1.551 28.3 0.481 0.249 1.00 0.645 1.3330.572 5.10 1.455 26.9 0.492 0.305 1.104 0.759 1.3270.655 4.46 1.388 25.7 0.503 0.358 1.197 0.862 1.3160.736 4.17 1.357 25.1 0.508 0.413 1.286 0.948 1.288
moyen 1.316

104
Structure B: 17.4R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 9.06 1.859 17.7 0.596 0.201 0.897 0.482 1.4970.381 7.66 1.718 16.9 0.608 0.247 0.994 0.578 1.5170.437 6.68 1.607 16.2 0.620 0.290 1.077 0.670 1.5330.490 5.96 1.544 15.6 0.631 0.333 1.154 0.747 1.525
moyen 1.518
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 9.06 1.859 31.3 0.458 0.262 1.024 0.551 1.7110.381 7.66 1.718 30.1 0.467 0.321 1.133 0.660 1.7320.437 6.68 1.607 29.1 0.474 0.380 1.233 0.767 1.7550.490 5.96 1.544 28.2 0.481 0.437 1.322 0.856 1.747
moyen 1.736
Structure C: 92.2R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 4.76 1.420 14.6 0.649 0.185 0.860 0.606 1.8820.381 4.76 1.420 14.6 0.649 0.231 0.961 0.961 1.7770.437 4.68 1.411 14.5 0.651 0.276 1.051 1.051 1.7050.490 4.17 1.357 14.0 0.661 0.318 1.128 1.128 1.696
moyen 1.765
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 4.76 1.420 26.3 0.497 0.241 0.982 0.692 2.1490.381 4.76 1.420 26.3 0.497 0.302 1.099 0.774 2.0310.437 4.68 1.411 26.2 .498 0.361 1.202 0.852 1.9500.490 4.17 1.357 25.1 0.508 0.413 1.285 0.947 1.933
moyen 2.015
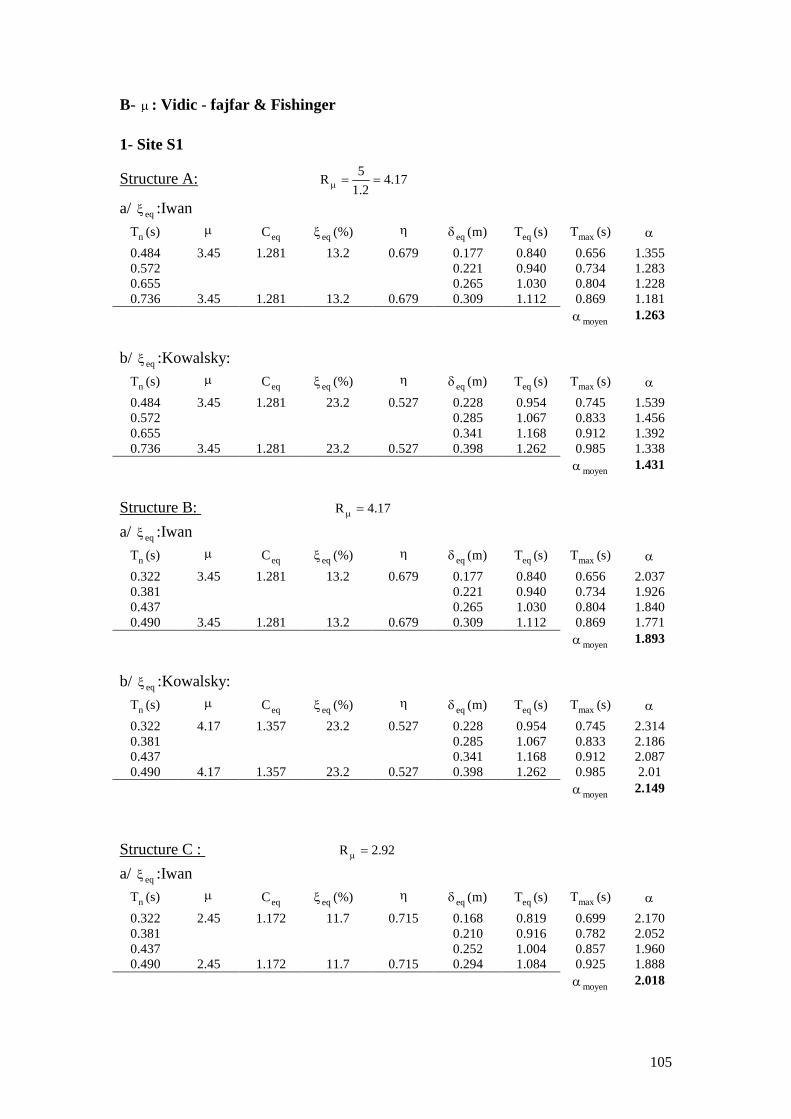
105
B- : Vidic - fajfar & Fishinger
1- Site S1
Structure A: 17.42.1
5R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 3.45 1.281 13.2 0.679 0.177 0.840 0.656 1.3550.572 0.221 0.940 0.734 1.2830.655 0.265 1.030 0.804 1.2280.736 3.45 1.281 13.2 0.679 0.309 1.112 0.869 1.181
moyen 1.263
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 3.45 1.281 23.2 0.527 0.228 0.954 0.745 1.5390.572 0.285 1.067 0.833 1.4560.655 0.341 1.168 0.912 1.3920.736 3.45 1.281 23.2 0.527 0.398 1.262 0.985 1.338
moyen 1.431
Structure B: 17.4R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 3.45 1.281 13.2 0.679 0.177 0.840 0.656 2.0370.381 0.221 0.940 0.734 1.9260.437 0.265 1.030 0.804 1.8400.490 3.45 1.281 13.2 0.679 0.309 1.112 0.869 1.771
moyen 1.893
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 4.17 1.357 23.2 0.527 0.228 0.954 0.745 2.3140.381 0.285 1.067 0.833 2.1860.437 0.341 1.168 0.912 2.0870.490 4.17 1.357 23.2 0.527 0.398 1.262 0.985 2.01
moyen 2.149
Structure C : 92.2R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 2.45 1.172 11.7 0.715 0.168 0.819 0.699 2.1700.381 0.210 0.916 0.782 2.0520.437 0.252 1.004 0.857 1.9600.490 2.45 1.172 11.7 0.715 0.294 1.084 0.925 1.888
moyen 2.018

106
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 2.45 1.172 19.2 0.575 0.209 0.914 0.780 2.4220.381 0.261 1.022 0.872 2.2890.437 0.313 1.119 0.955 2.1850.490 2.45 1.172 19.2 0.575 0.365 1.209 1.032 2.106
moyen 2.250
2- Site S2
Structure A: 17.42.1
5R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 3.43 1.278 13.2 0.678 0.177 0.841 0.658 1.3590.572 0.221 0.941 0.736 1.2870.655 0.265 1.030 0.806 1.2300.736 3.43 1.278 13.2 0.678 0.310 1.113 0.871 1.183
moyen 1.257
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 3.43 1.278 23.1 0.528 0.227 0.954 0.746 1.5410.572 0.284 1.067 0.835 1.4600.655 0.341 1.168 0.914 1.3950.736 3.43 1.278 23.1 0.528 0.398 1.262 0.987 1.349
moyen 1.435
Structure B: 17.4R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 4.08 1.348 13.9 0.663 0.181 0.850 0.631 1.9600.381 3.58 1.295 13.3 0.676 0.222 0.955 0.727 1.9090.437 3.43 1.278 13.2 0.678 0.265 1.030 0.806 1.8440.490 3.43 1.278 13.2 0.678 0.310 1.112 0.870 1.775
moyen 1.872
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 4.08 1.348 24.9 0.491 0.244 0.970 0.720 2.2360.381 3.58 1.295 23.6 0.503 0.298 1.071 0.827 2.1710.437 3.43 1.278 23.1 0.528 0.341 1.168 0.914 2.0910.490 3.43 1.278 23.1 0.528 0.398 1.262 0.987 2.014
moyen 2.128
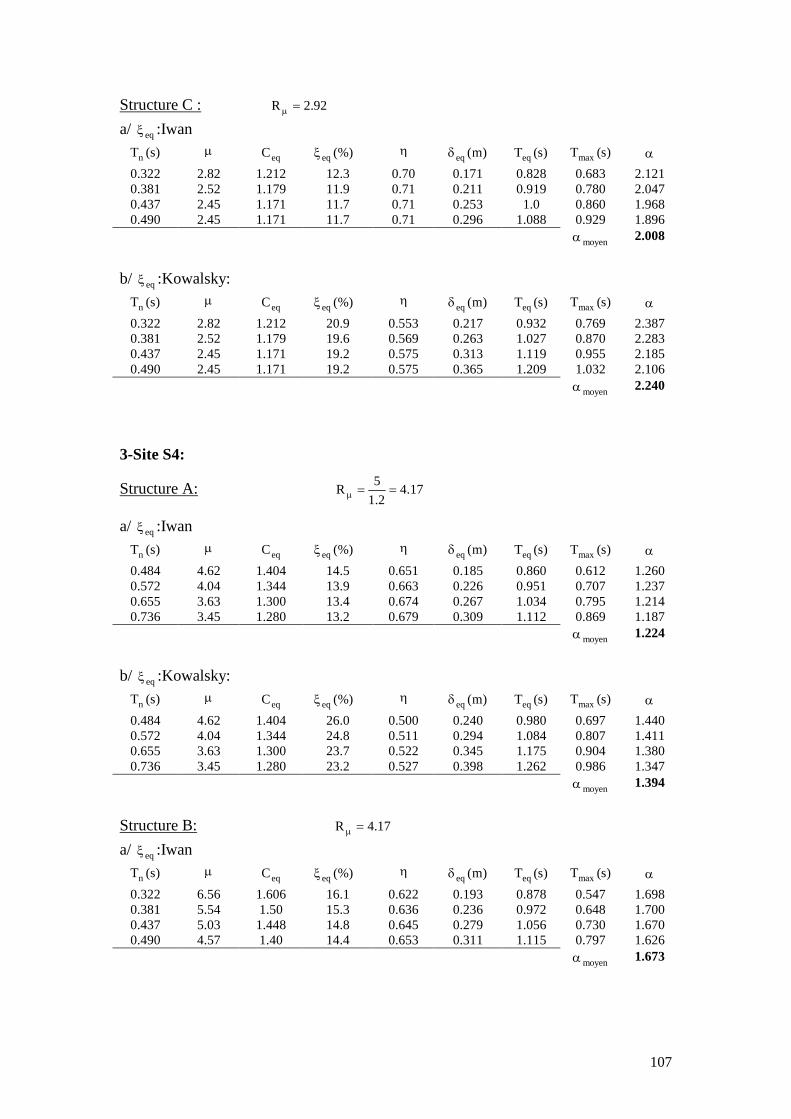
107
Structure C : 92.2R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 2.82 1.212 12.3 0.70 0.171 0.828 0.683 2.1210.381 2.52 1.179 11.9 0.71 0.211 0.919 0.780 2.0470.437 2.45 1.171 11.7 0.71 0.253 1.0 0.860 1.9680.490 2.45 1.171 11.7 0.71 0.296 1.088 0.929 1.896
moyen 2.008
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 2.82 1.212 20.9 0.553 0.217 0.932 0.769 2.3870.381 2.52 1.179 19.6 0.569 0.263 1.027 0.870 2.2830.437 2.45 1.171 19.2 0.575 0.313 1.119 0.955 2.1850.490 2.45 1.171 19.2 0.575 0.365 1.209 1.032 2.106
moyen 2.240
3-Site S4:
Structure A: 17.42.1
5R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 4.62 1.404 14.5 0.651 0.185 0.860 0.612 1.2600.572 4.04 1.344 13.9 0.663 0.226 0.951 0.707 1.2370.655 3.63 1.300 13.4 0.674 0.267 1.034 0.795 1.2140.736 3.45 1.280 13.2 0.679 0.309 1.112 0.869 1.187
moyen 1.224
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 4.62 1.404 26.0 0.500 0.240 0.980 0.697 1.4400.572 4.04 1.344 24.8 0.511 0.294 1.084 0.807 1.4110.655 3.63 1.300 23.7 0.522 0.345 1.175 0.904 1.3800.736 3.45 1.280 23.2 0.527 0.398 1.262 0.986 1.347
moyen 1.394
Structure B: 17.4R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 6.56 1.606 16.1 0.622 0.193 0.878 0.547 1.6980.381 5.54 1.50 15.3 0.636 0.236 0.972 0.648 1.7000.437 5.03 1.448 14.8 0.645 0.279 1.056 0.730 1.6700.490 4.57 1.40 14.4 0.653 0.311 1.115 0.797 1.626
moyen 1.673

108
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 6.56 1.606 29.0 0.475 0.253 1.005 0.626 1.9410.381 5.54 1.50 27.6 0.486 0.309 1.111 0.741 1.9450.437 5.03 1.448 26.8 0.493 0.365 1.208 0.834 1.9080.490 4.57 1.40 25.9 0.500 0.420 1.296 0.926 1.890
moyen 1.922
Structure C: 92.22.15.3
R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 4.28 1.369 14.1 0.659 0.182 0.853 0.623 1.9360.381 3.75 1.313 13.5 0.672 0.223 0.945 0.720 1.8900.437 3.38 1.257 13.1 0.681 0.264 1.028 0.817 1.8700.490 3.11 1.244 12.7 0.690 0.304 1.103 0.887 1.810
moyen 1.876
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 4.28 1.369 25.3 0.506 0.237 0.974 0.711 2.2080.381 3.75 1.313 24.0 0.519 0.289 1.075 0.819 2.1500.437 3.38 1.257 22.9 0.530 0.340 1.165 0.927 2.1210.490 3.11 1.244 22.0 0.540 0.389 1.247 1.002 2.046
moyen 2.131
smoyen sera estimé2
VFFNH , eqC formulé par Iwan
comme eq a une incidence directe sur ; sa sélection est faite en faisant le test sur :
4 eq est la formulation recommandé par Iwan
4 eq est la formulation proposée par Kowalsky
Site rocheux: S1075.0C;5R T 050.0C;5R T 050.0C;5.3R T
NH VFF NH VFF NH VFF
4.17 Kw 3.45 Iw 4.17 Kw 3.45 Iw 2.92 Iw 2.45 Iw4.17 Kw 3.45 Iw 4.17 Kw 3.45 Iw 2.92 Iw 2.45 Iw4.17 Kw 3.45 Iw 4.17 Kw 3.45 Iw 2.92 Iw 2.45 Iw4.17 Kw 3.45 Iw 4.17 Kw 3.45 Iw 2.92 Iw 2.45 Iw
1s 1.376 1s 1.262 2s 2.065 2s 1.893 3s 1.961 3s 2.018
319.1moy1S 979.1moy2S 990.1moy3S
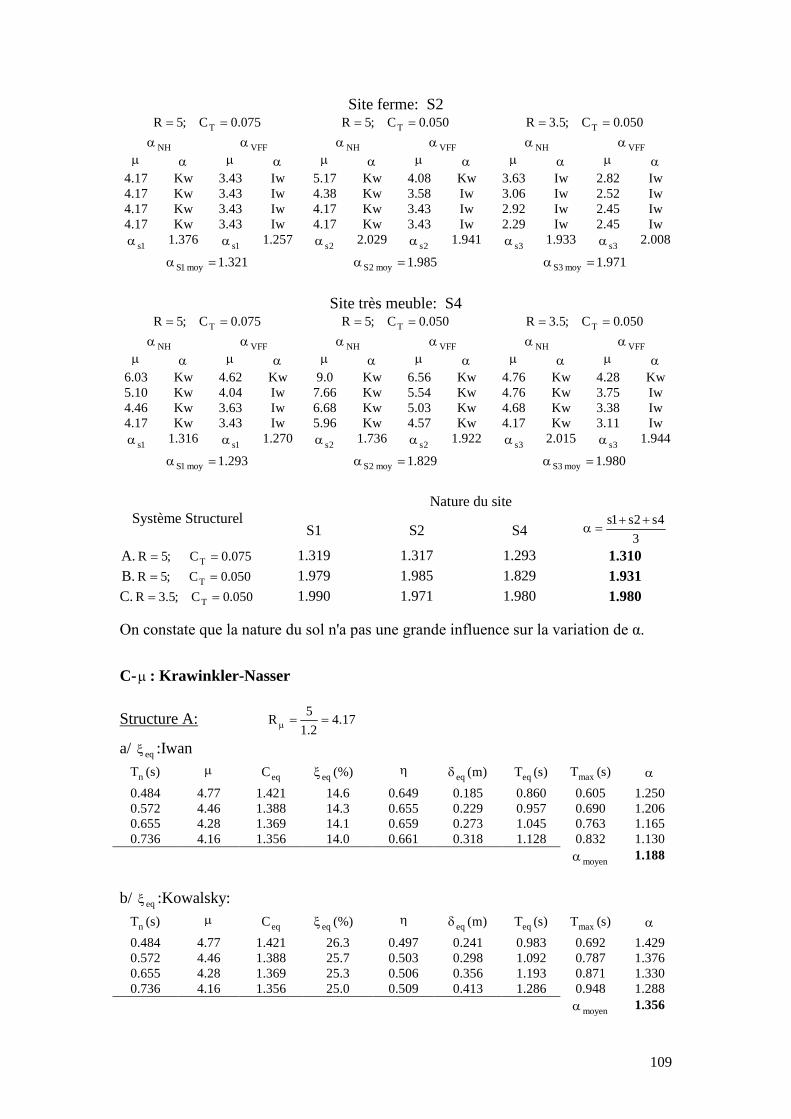
109
Site ferme: S2075.0C;5R T 050.0C;5R T 050.0C;5.3R T
NH VFF NH VFF NH VFF
4.17 Kw 3.43 Iw 5.17 Kw 4.08 Kw 3.63 Iw 2.82 Iw4.17 Kw 3.43 Iw 4.38 Kw 3.58 Iw 3.06 Iw 2.52 Iw4.17 Kw 3.43 Iw 4.17 Kw 3.43 Iw 2.92 Iw 2.45 Iw4.17 Kw 3.43 Iw 4.17 Kw 3.43 Iw 2.29 Iw 2.45 Iw
1s 1.376 1s 1.257 2s 2.029 2s 1.941 3s 1.933 3s 2.008
321.1moy1S 985.1moy2S 971.1moy3S
Site très meuble: S4075.0C;5R T 050.0C;5R T 050.0C;5.3R T
NH VFF NH VFF NH VFF
6.03 Kw 4.62 Kw 9.0 Kw 6.56 Kw 4.76 Kw 4.28 Kw5.10 Kw 4.04 Iw 7.66 Kw 5.54 Kw 4.76 Kw 3.75 Iw4.46 Kw 3.63 Iw 6.68 Kw 5.03 Kw 4.68 Kw 3.38 Iw4.17 Kw 3.43 Iw 5.96 Kw 4.57 Kw 4.17 Kw 3.11 Iw
1s 1.316 1s 1.270 2s 1.736 2s 1.922 3s 2.015 3s 1.944
293.1moy1S 829.1moy2S 980.1moy3S
Nature du siteSystème Structurel
S1 S2 S4 34s2s1s
A. 075.0C;5R T 1.319 1.317 1.293 1.310B. 050.0C;5R T 1.979 1.985 1.829 1.931C. 050.0C;5.3R T 1.990 1.971 1.980 1.980
On constate que la nature du sol n'a pas une grande influence sur la variation de α.
C-: Krawinkler-Nasser
Structure A: 17.42.1
5R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 4.77 1.421 14.6 0.649 0.185 0.860 0.605 1.2500.572 4.46 1.388 14.3 0.655 0.229 0.957 0.690 1.2060.655 4.28 1.369 14.1 0.659 0.273 1.045 0.763 1.1650.736 4.16 1.356 14.0 0.661 0.318 1.128 0.832 1.130
moyen 1.188
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.484 4.77 1.421 26.3 0.497 0.241 0.983 0.692 1.4290.572 4.46 1.388 25.7 0.503 0.298 1.092 0.787 1.3760.655 4.28 1.369 25.3 0.506 0.356 1.193 0.871 1.3300.736 4.16 1.356 25.0 0.509 0.413 1.286 0.948 1.288
moyen 1.356
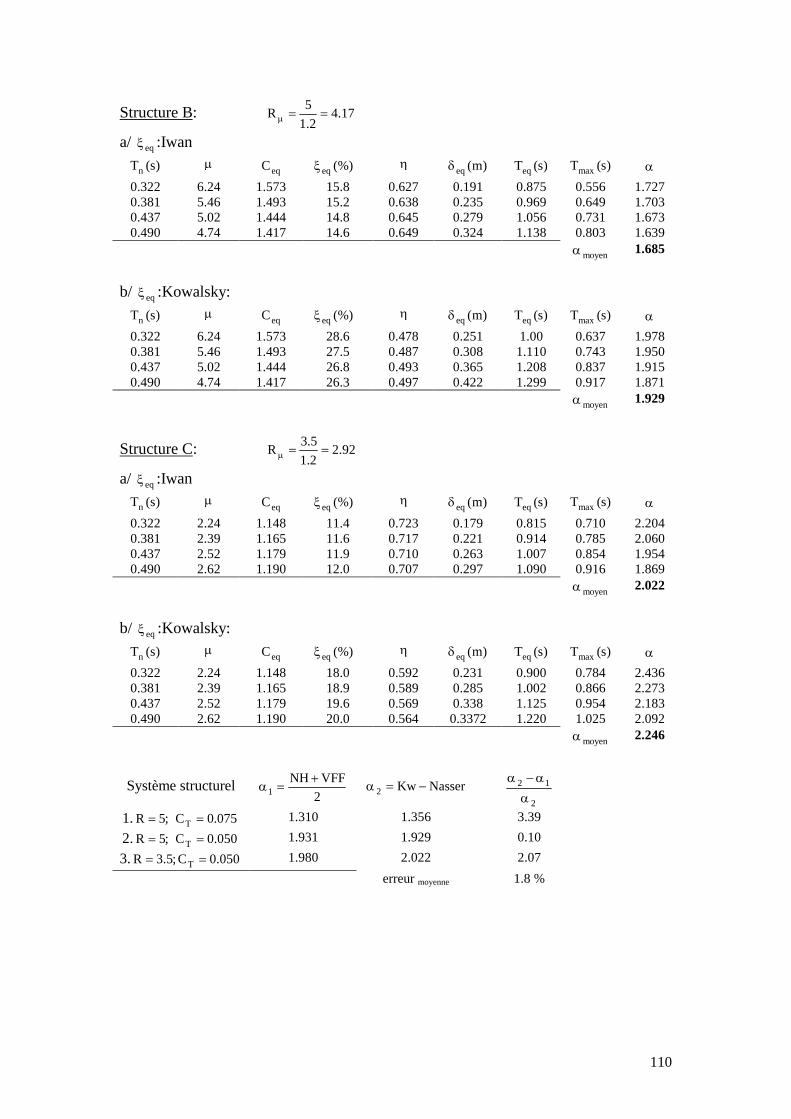
110
Structure B: 17.42.1
5R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 6.24 1.573 15.8 0.627 0.191 0.875 0.556 1.7270.381 5.46 1.493 15.2 0.638 0.235 0.969 0.649 1.7030.437 5.02 1.444 14.8 0.645 0.279 1.056 0.731 1.6730.490 4.74 1.417 14.6 0.649 0.324 1.138 0.803 1.639
moyen 1.685
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 6.24 1.573 28.6 0.478 0.251 1.00 0.637 1.9780.381 5.46 1.493 27.5 0.487 0.308 1.110 0.743 1.9500.437 5.02 1.444 26.8 0.493 0.365 1.208 0.837 1.9150.490 4.74 1.417 26.3 0.497 0.422 1.299 0.917 1.871
moyen 1.929
Structure C: 92.22.15.3
R
a/ eq :Iwan)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 2.24 1.148 11.4 0.723 0.179 0.815 0.710 2.2040.381 2.39 1.165 11.6 0.717 0.221 0.914 0.785 2.0600.437 2.52 1.179 11.9 0.710 0.263 1.007 0.854 1.9540.490 2.62 1.190 12.0 0.707 0.297 1.090 0.916 1.869
moyen 2.022
b/ eq :Kowalsky:)s(Tn
eqC eq (%) )m(eq )s(Teq )s(Tmax
0.322 2.24 1.148 18.0 0.592 0.231 0.900 0.784 2.4360.381 2.39 1.165 18.9 0.589 0.285 1.002 0.866 2.2730.437 2.52 1.179 19.6 0.569 0.338 1.125 0.954 2.1830.490 2.62 1.190 20.0 0.564 0.3372 1.220 1.025 2.092
moyen 2.246
Système structurel2
VFFNH1
NasserKw2
2
12
1. 075.0C;5R T 1.310 1.356 3.39
2. 050.0C;5R T 1.931 1.929 0.10
3. 050.0C;5.3R T 1.980 2.022 2.07
erreur moyenne 1.8 %

111
Conclusions partielles:
1. Structure nue nitelim T30.1T quelque soit la nature du sol
2. Structure + maçonnerie non participante nitelim T90.1T pour un bon sol
nitelim T80.1T pour un mauvais sol
3. Structure + maçonnerie participante nitelim T90.1T quelque soit la nature du sol
comme l'erreur enregistrée est très faible (1.8 %), la suite de l'investigation sera
articulée sur les résultats issus de l'évaluation de à partir de la formulation
)T,R( n établie par Krawinkler et Nasser.
s0736Tmax 16.4 nitelim T288.1T Structure souple24.6max nitelim T978.1T
s0322Tmin 24.2min nitelim T204.2T
Structure rigide
-Structure rigide nitelim T0.2T -Structure souple nitelim T30.1T
Il a été constaté que les taux de ferraillage recommandés par le RPA99 s'accordent
avec un niveau de ductilité moyen. Il s'avère donc nécessaire d'apporter la correction
nécessaire en attribuant 4 , et évaluer par l'occasion le coefficient de réduction de
la force élastique R qui lui est concordant. Le niveau de ductilité a été trouvé
excessif pour le système structurel 2 (présence de maçonnerie rigide non participante;
050.0C;5R T d'où 17.42.1
5R ). Les résultats présentés dans le tableau ci-
dessous sont évalués à partir de la formulation )T,(R n établie par Krawinkler et
Nasser, et les caractéristiques d'équivalence du système élastiquement équivalent:
neqeq TCT )(feq )(fCeq en utilisant les équations proposées par Iwan.
)s(Tn C R eqC eq (%) )s(Teq )s(Tmax
0.322 4.0 1.548 3.06 1.339 13.8 0.665 0.849 0.634 1.9700.381 4.0 1.378 3.28 0.950 0.709 1.8610.437 4.0 1.265 3.45 1.040 0.777 1.7780.490 4.0 1.186 3.59 1.339 13.8 0.665 1.124 0.839 1.712
moyen 1.830

112
Procédure 2
edrifti .C d'oùCdrift
e
emax 2T et maxT sera la période maximale à ne pas dépasser afin de satisfaire ledéplacement global tolérable. Le coefficient d'amplification de la période élastique nT
sera:n
max
T
T ou encore
CT2
T
2
T
T drift
nn
e
n
max
A- et C : Newmark-Hall
1- Site S1
Structure B: 17.42.1
5R s3.0Tc
17.4RTT cn et 0.1C
)s(Tn C )m(eq )s(Tmax
0.484 4.17 1.0 0.12 0.693 1.4320.572 4.17 1.0 0.15 0.775 1.3540.655 4.17 1.0 0.18 0.848 1.2950.736 4.17 1.0 0.21 0.917 1.246
Structure 1 moyen 1.332
Structure B: 17.42.1
5R
)s(Tn C )m(eq )s(Tmax
0.322 4.17 1.0 0.12 0.693 2.1520.381 4.17 1.0 0.15 0.775 2.0340.437 4.17 1.0 0.18 0.848 1.9410.490 4.17 1.0 0.21 0.917 1.871
Structure 2 moyen 2.0
Structure C: 92.22.1
5R
92.2RTT cn et 0.1C
)s(Tn C )m(eq )s(Tmax
0.322 2.92 1.0 0.12 0.693 2.1520.381 2.92 1.0 0.15 0.775 2.0340.437 2.92 1.0 0.18 0.848 1.9410.490 2.92 1.0 0.21 0.917 1.871
Structure 3 moyen 2.0
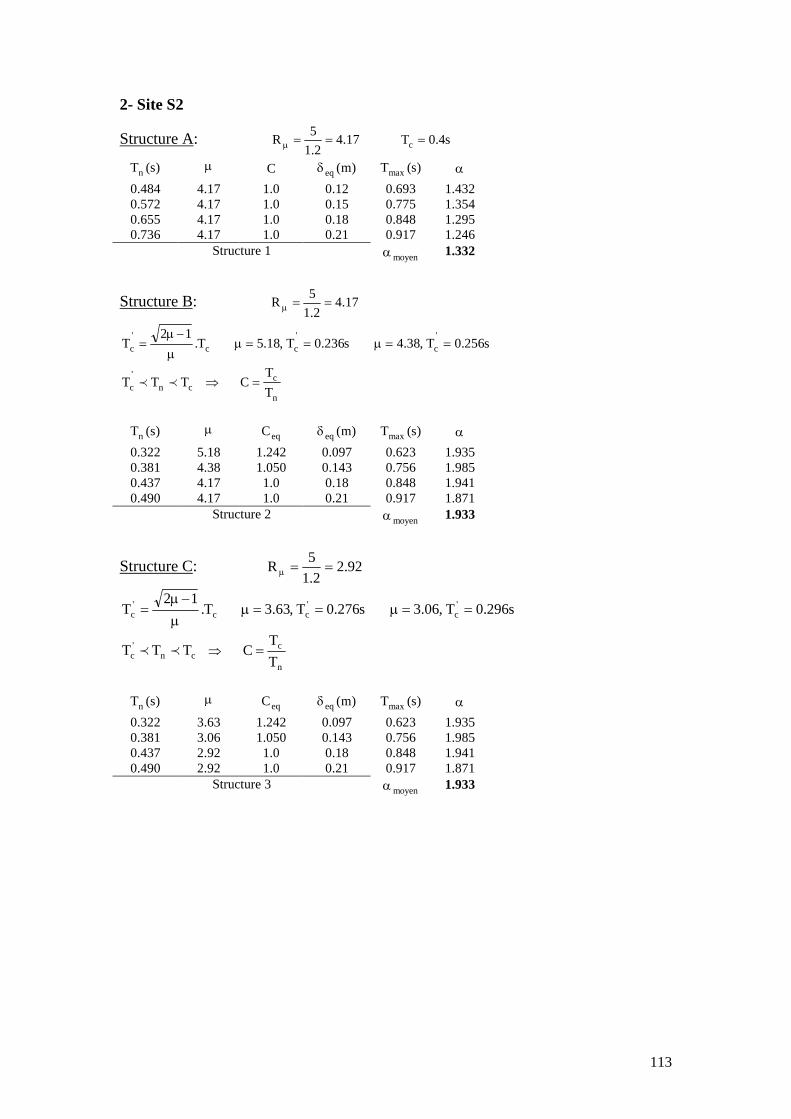
113
2- Site S2
Structure A: 17.42.1
5R s4.0Tc
)s(Tn C )m(eq )s(Tmax
0.484 4.17 1.0 0.12 0.693 1.4320.572 4.17 1.0 0.15 0.775 1.3540.655 4.17 1.0 0.18 0.848 1.2950.736 4.17 1.0 0.21 0.917 1.246
Structure 1 moyen 1.332
Structure B: 17.42.1
5R
c'c T.
12T
s236.0T,18.5
'c s256.0T,38.4
'c
cn'c TTT
n
c
TT
C
)s(Tn
eqC )m(eq )s(Tmax
0.322 5.18 1.242 0.097 0.623 1.9350.381 4.38 1.050 0.143 0.756 1.9850.437 4.17 1.0 0.18 0.848 1.9410.490 4.17 1.0 0.21 0.917 1.871
Structure 2 moyen 1.933
Structure C: 92.22.1
5R
c'c T.
12T
s276.0T,63.3 'c s296.0T,06.3 '
c
cn'c TTT
n
c
TT
C
)s(Tn
eqC )m(eq )s(Tmax
0.322 3.63 1.242 0.097 0.623 1.9350.381 3.06 1.050 0.143 0.756 1.9850.437 2.92 1.0 0.18 0.848 1.9410.490 2.92 1.0 0.21 0.917 1.871
Structure 3 moyen 1.933
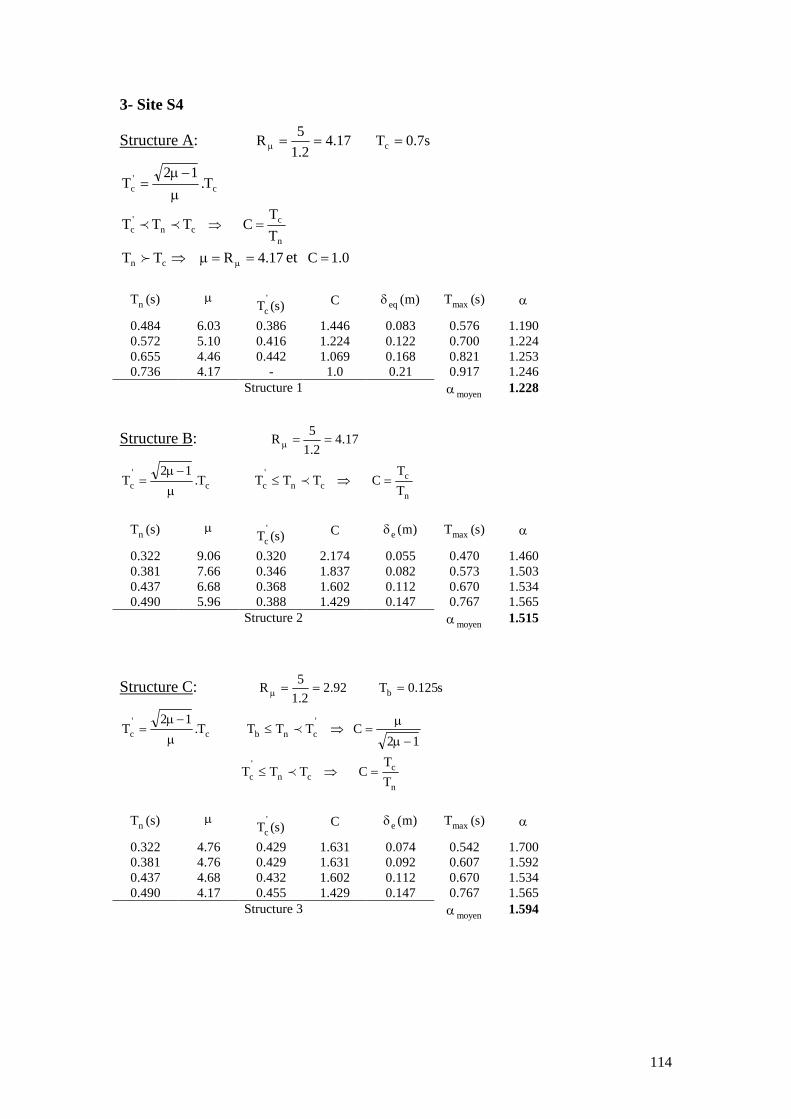
114
3- Site S4
Structure A: 17.42.1
5R s7.0Tc
c'c T.
12T
cn'c TTT
n
c
TT
C
17.4RTT cn et 0.1C
)s(Tn
)s(T'c
C )m(eq )s(Tmax
0.484 6.03 0.386 1.446 0.083 0.576 1.1900.572 5.10 0.416 1.224 0.122 0.700 1.2240.655 4.46 0.442 1.069 0.168 0.821 1.2530.736 4.17 - 1.0 0.21 0.917 1.246
Structure 1 moyen 1.228
Structure B: 17.42.1
5R
c'c T.
12T
cn
'c TTT
n
c
TT
C
)s(Tn
)s(T'c
C )m(e )s(Tmax
0.322 9.06 0.320 2.174 0.055 0.470 1.4600.381 7.66 0.346 1.837 0.082 0.573 1.5030.437 6.68 0.368 1.602 0.112 0.670 1.5340.490 5.96 0.388 1.429 0.147 0.767 1.565
Structure 2 moyen 1.515
Structure C: 92.22.1
5R s125.0Tb
c'c T.
12T
'cnb TTT
12C
cn'c TTT
n
c
TT
C
)s(Tn
)s(T'c
C )m(e )s(Tmax
0.322 4.76 0.429 1.631 0.074 0.542 1.7000.381 4.76 0.429 1.631 0.092 0.607 1.5920.437 4.68 0.432 1.602 0.112 0.670 1.5340.490 4.17 0.455 1.429 0.147 0.767 1.565
Structure 3 moyen 1.594
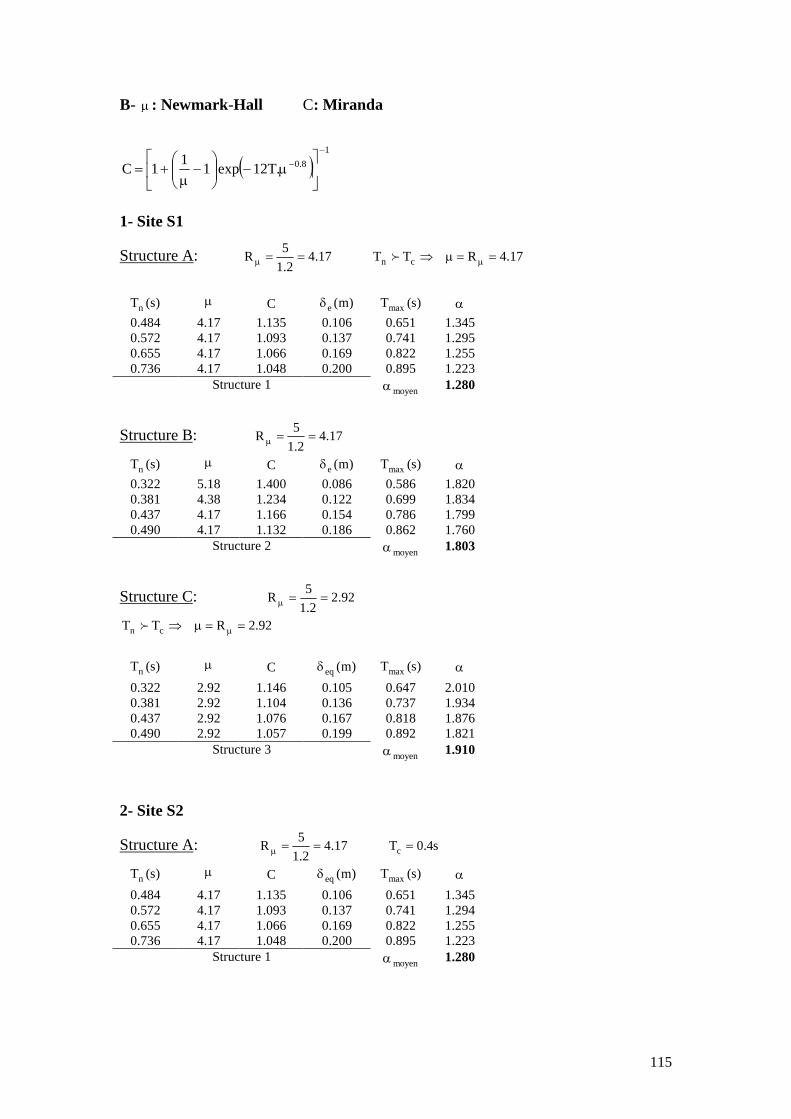
115
B- : Newmark-Hall C: Miranda
1
8.0.T12exp11
1C
1- Site S1
Structure A: 17.42.1
5R 17.4RTT cn
)s(Tn C )m(e )s(Tmax
0.484 4.17 1.135 0.106 0.651 1.3450.572 4.17 1.093 0.137 0.741 1.2950.655 4.17 1.066 0.169 0.822 1.2550.736 4.17 1.048 0.200 0.895 1.223
Structure 1 moyen 1.280
Structure B: 17.42.1
5R
)s(Tn C )m(e )s(Tmax
0.322 5.18 1.400 0.086 0.586 1.8200.381 4.38 1.234 0.122 0.699 1.8340.437 4.17 1.166 0.154 0.786 1.7990.490 4.17 1.132 0.186 0.862 1.760
Structure 2 moyen 1.803
Structure C: 92.22.1
5R
92.2RTT cn
)s(Tn C )m(eq )s(Tmax
0.322 2.92 1.146 0.105 0.647 2.0100.381 2.92 1.104 0.136 0.737 1.9340.437 2.92 1.076 0.167 0.818 1.8760.490 2.92 1.057 0.199 0.892 1.821
Structure 3 moyen 1.910
2- Site S2
Structure A: 17.42.1
5R s4.0Tc
)s(Tn C )m(eq )s(Tmax
0.484 4.17 1.135 0.106 0.651 1.3450.572 4.17 1.093 0.137 0.741 1.2940.655 4.17 1.066 0.169 0.822 1.2550.736 4.17 1.048 0.200 0.895 1.223
Structure 1 moyen 1.280
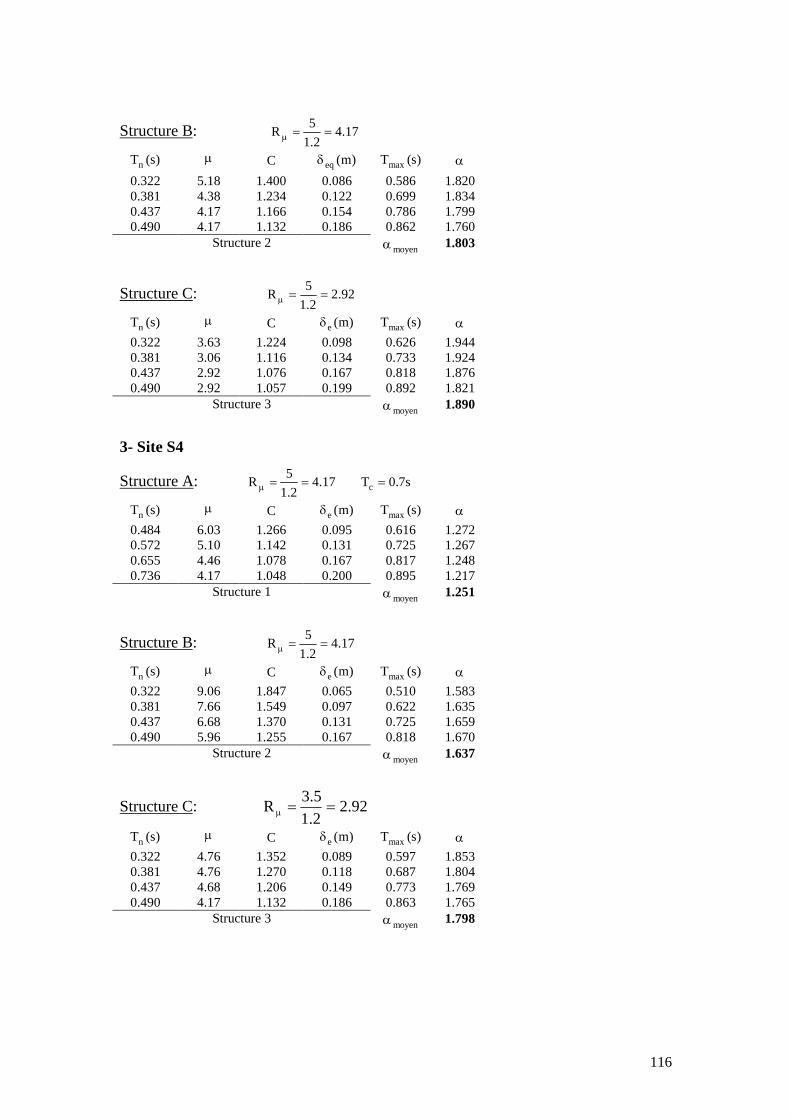
116
Structure B: 17.42.1
5R
)s(Tn C )m(eq )s(Tmax
0.322 5.18 1.400 0.086 0.586 1.8200.381 4.38 1.234 0.122 0.699 1.8340.437 4.17 1.166 0.154 0.786 1.7990.490 4.17 1.132 0.186 0.862 1.760
Structure 2 moyen 1.803
Structure C: 92.22.1
5R
)s(Tn C )m(e )s(Tmax
0.322 3.63 1.224 0.098 0.626 1.9440.381 3.06 1.116 0.134 0.733 1.9240.437 2.92 1.076 0.167 0.818 1.8760.490 2.92 1.057 0.199 0.892 1.821
Structure 3 moyen 1.890
3- Site S4
Structure A: 17.42.1
5R s7.0Tc
)s(Tn C )m(e )s(Tmax
0.484 6.03 1.266 0.095 0.616 1.2720.572 5.10 1.142 0.131 0.725 1.2670.655 4.46 1.078 0.167 0.817 1.2480.736 4.17 1.048 0.200 0.895 1.217
Structure 1 moyen 1.251
Structure B: 17.42.1
5R
)s(Tn C )m(e )s(Tmax
0.322 9.06 1.847 0.065 0.510 1.5830.381 7.66 1.549 0.097 0.622 1.6350.437 6.68 1.370 0.131 0.725 1.6590.490 5.96 1.255 0.167 0.818 1.670
Structure 2 moyen 1.637
Structure C: 92.22.15.3
R
)s(Tn C )m(e )s(Tmax
0.322 4.76 1.352 0.089 0.597 1.8530.381 4.76 1.270 0.118 0.687 1.8040.437 4.68 1.206 0.149 0.773 1.7690.490 4.17 1.132 0.186 0.863 1.765
Structure 3 moyen 1.798
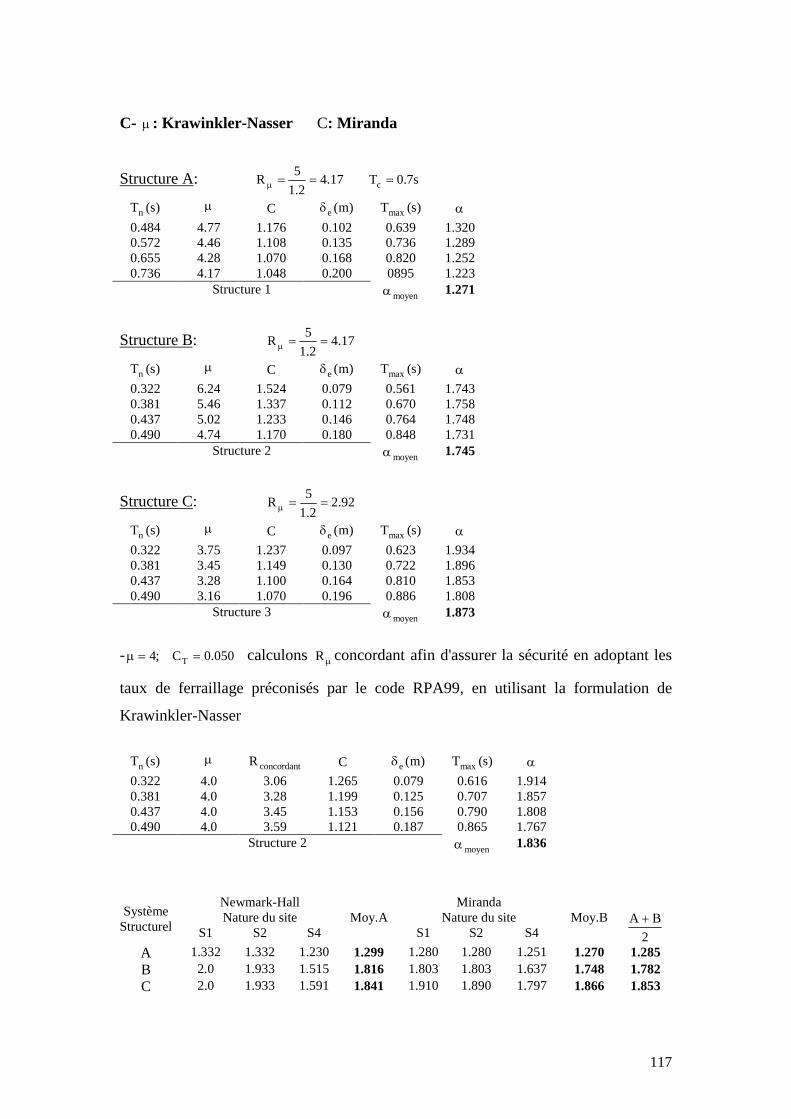
117
C- : Krawinkler-Nasser C: Miranda
Structure A: 17.42.1
5R s7.0Tc
)s(Tn C )m(e )s(Tmax
0.484 4.77 1.176 0.102 0.639 1.3200.572 4.46 1.108 0.135 0.736 1.2890.655 4.28 1.070 0.168 0.820 1.2520.736 4.17 1.048 0.200 0895 1.223
Structure 1 moyen 1.271
Structure B: 17.42.1
5R
)s(Tn C )m(e )s(Tmax
0.322 6.24 1.524 0.079 0.561 1.7430.381 5.46 1.337 0.112 0.670 1.7580.437 5.02 1.233 0.146 0.764 1.7480.490 4.74 1.170 0.180 0.848 1.731
Structure 2 moyen 1.745
Structure C: 92.22.1
5R
)s(Tn C )m(e )s(Tmax
0.322 3.75 1.237 0.097 0.623 1.9340.381 3.45 1.149 0.130 0.722 1.8960.437 3.28 1.100 0.164 0.810 1.8530.490 3.16 1.070 0.196 0.886 1.808
Structure 3 moyen 1.873
- 050.0C;4 T calculons R concordant afin d'assurer la sécurité en adoptant les
taux de ferraillage préconisés par le code RPA99, en utilisant la formulation de
Krawinkler-Nasser
)s(Tn
concordantR C )m(e )s(Tmax 0.322 4.0 3.06 1.265 0.079 0.616 1.9140.381 4.0 3.28 1.199 0.125 0.707 1.8570.437 4.0 3.45 1.153 0.156 0.790 1.8080.490 4.0 3.59 1.121 0.187 0.865 1.767
Structure 2 moyen 1.836
Newmark-Hall MirandaNature du site Nature du siteSystème
Structurel S1 S2 S4Moy.A
S1 S2 S4Moy.B
2BA
A 1.332 1.332 1.230 1.299 1.280 1.280 1.251 1.270 1.285B 2.0 1.933 1.515 1.816 1.803 1.803 1.637 1.748 1.782C 2.0 1.933 1.591 1.841 1.910 1.890 1.797 1.866 1.853

118
Général Adapté aux taux d'acier du RPA99SystèmeStructurel Proc. 1 Proc.2 Erreur Moyenne Proc. 1 Proc.2 Erreur Moyenne
A 1.310 1.285 1.98 1.298 1.310 1.285 1.98 1.298B 1.931 1.782 7.72 1.857 1.830 1.836 0.33 1.833C 1.980 1.853 6.36 1.918 1.980 1.857 6.36 1.918
Variation moyenne 5.35 % Variation moyenne 2.67 %Tableau 4.1.Variation du coefficient d'amplification de la période tenant compte du site
Général Adapté aux taux d'acier du RPA99SystèmeStructurel Proc. 1 Proc.2 Erreur Moyenne Proc. 1 Proc.2 Erreur Moyenne
A 1.356 1.271 6.27 1.313 1.356 1.271 6.27 1.298B 1.929 1.745 9.53 1.837 1.830 1.836 0.33 1.833C 2.022 1.873 7.37 1.948 2.022 1.873 7.37 1.918
Variation moyenne 7.72 % Variation moyenne 4.44 %Tableau 4.2.Variation du coefficient d'amplification de la période faisant abstraction du site
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0 1 2 3 4 5 6 7 8
Ductilité de déplacement
Am
ortis
sem
ent
équi
vale
nt
KowalskyIwanPriestleyReinhorn-KunathGulkan-Sozen
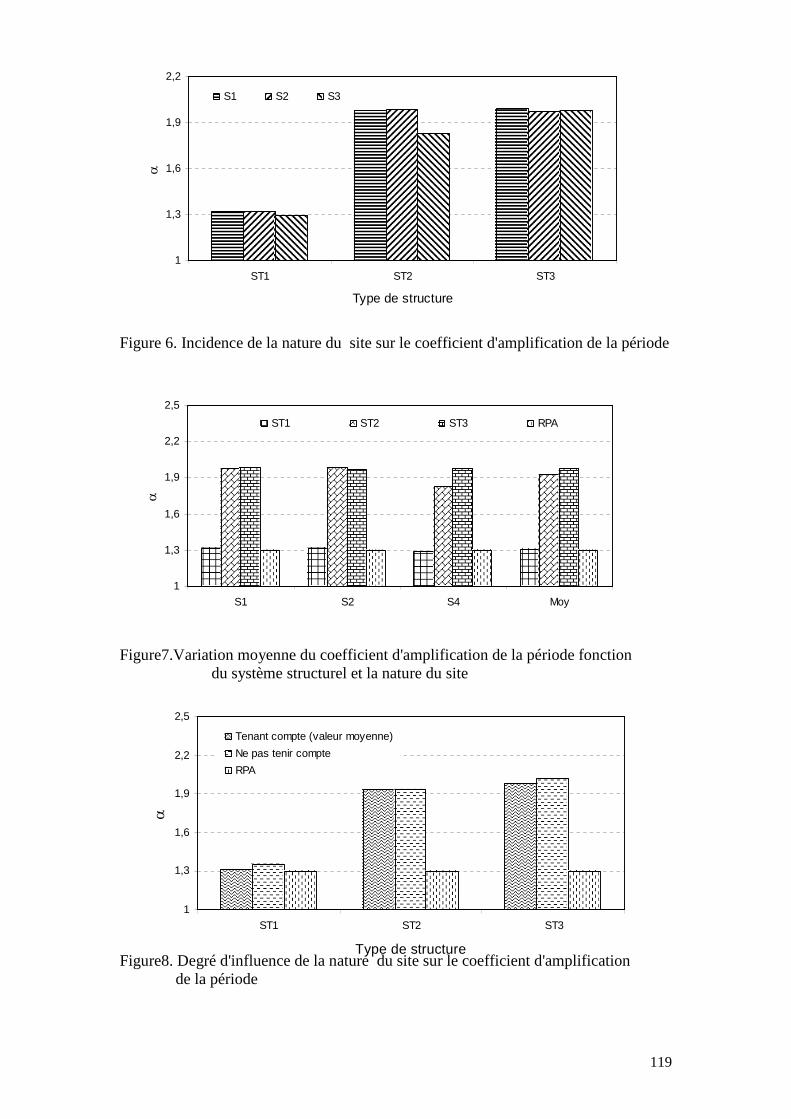
119
Figure 6. Incidence de la nature du site sur le coefficient d'amplification de la période
Figure7.Variation moyenne du coefficient d'amplification de la période fonctiondu système structurel et la nature du site
Figure8. Degré d'influence de la nature du site sur le coefficient d'amplificationde la période
1
1,3
1,6
1,9
2,2
2,5
S1 S2 S4 Moy
α
ST1 ST2 ST3 RPA
1
1,3
1,6
1,9
2,2
2,5
ST1 ST2 ST3
Type de structure
α
Tenant compte (valeur moyenne)
Ne pas tenir compte
RPA
1
1,3
1,6
1,9
2,2
ST1 ST2 ST3
Type de structure
α
S1 S2 S3
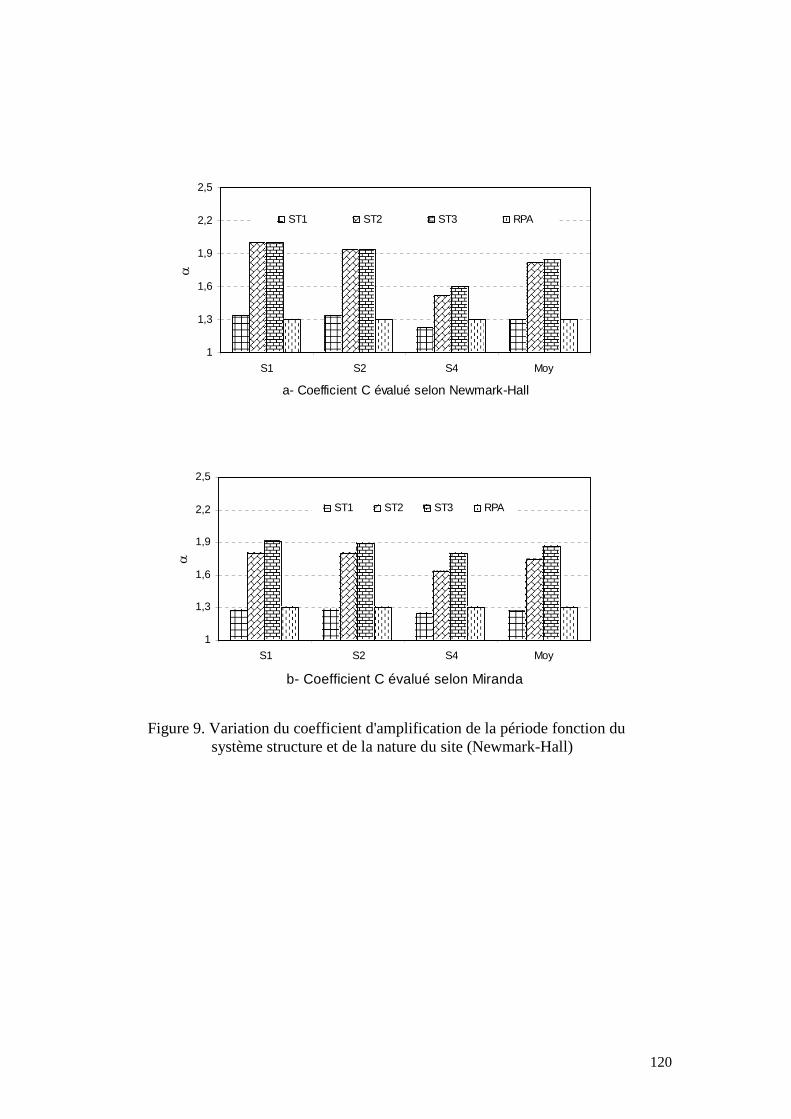
120
Figure 9. Variation du coefficient d'amplification de la période fonction dusystème structure et de la nature du site (Newmark-Hall)
1
1,3
1,6
1,9
2,2
2,5
S1 S2 S4 Moy
b- Coefficient C évalué selon Miranda
α
ST1 ST2 ST3 RPA
1
1,3
1,6
1,9
2,2
2,5
S1 S2 S4 Moy
a- Coefficient C évalué selon Newmark-Hall
α
ST1 ST2 ST3 RPA

121
Figure 10.Variation du coefficient d'amplification de la période entenant compte de la nature du site
Figure 11.Variation du coefficient d'amplification de la période enfaisant abstraction de la nature du site
1
1,3
1,6
1,9
2,2
Structure 1 Structure 2 Structure 3
α
Procédure 1
Procédure 2
Procédure 1a
Procédure 2a
Moyenne 1-2
Moyenne 1 a-2a
RPA
1
1,3
1,6
1,9
2,2
Structure 1 Structure 2 Structure 3
α
Procédure 1
Procédure 2
Procédure 1a
Procédure 2a
Moyenne 1-2
Moyenne 1a-2a
RPA
119
5.1 Introduction
Pour assurer le niveau de sécurité recherché caractérisé par une certaine demande de ductilité, le
dimensionnement des zones dissipatives d’énergie dans les portiques autostables nécessite une
attention particulière afin d’éviter la ruine par cisaillement et favoriser le développement du
mécanisme de ruine désiré. Ceci n’est possible qu’à travers un taux d’armature transversale
adéquatement disposée sur une longueur potentiellement affectée par la rotulation plastique.
Plusieurs facteurs ayant une incidence directe sur ce taux ont été recensés de part le monde,
parmi lesquels le confinement du béton a été dégagé comme étant le paramètre déterminant.
Le contenu de ce chapitre est consacré principalement à l’aspect théoriquedu confinement, afin
d’illustrer son incidence significative sur l’étendue de la longueur de confinement dans les
sections critiques. Une synthèse sur les modèles développés régissant le comportement
contrainte-déformation des éléments en béton ordinaire et à haute résistance est présentée. Les
longueurs de confinement réglementaires universellement admises [1-3] sont également
proposées en guise d’alternative pouvant servir à l’amélioration de la réglementation
parasismique algérienne en vigueur [4].
5.2. Confinement du béton - armature de confinement
Plusieurs études [5-7] ont montré que les éléments en béton fortement comprimés, munis
d’aciers transversaux nécessaires pour la résistance uniquement, exhibent une rupture brutale. En
effet, le béton inscrit entre deux lits successifs d’armature transversale se gonfle et se désintègre
et l’armature longitudinale flambe. L’élément est ainsi dans l’incapacité de fournir une résistance
additionnelle pour pouvoir supporter une charge plus grande que la charge ultime. Par contre, la
présence d’une armature transversale supplémentaire, bien disposée latéralement, contribue à
confiner le béton du noyau de la section. Soumise à la même charge ultime, la section dans ce
cas se dérobe à l’effort par déformations inélastiques; ce n’est que le béton d’enrobage qui
éclate. Ceci illustre bien le comportement ductile des sections de béton confiné où le ferraillage
transversal permet :
- d’agir comme armature de cisaillement;
- d’augmenter la capacité de résistance et de déformation du béton confiné en compression ;
- d’empêcher le flambement prématuré des armatures longitudinales comprimées;
- de réduire l’effet disruptif du noyau de béton sous une action cyclique de grandes
amplitudes.

120
La relation contrainte-déformation du béton confiné dépend de plusieurs facteurs. Pour
développer un modèle analytique de la courbe contrainte-déformation du béton confiné,
plusieurs travaux de recherche ont été réalisés [7.8.9] pour évaluer les effets d’un champ de
variables telles que :
- nature et résistance du béton non confiné ;
- taux et distribution de l’armature longitudinale sur le périmètre du noyau;
- taux, espacement et configuration de l’armature transversale;
- forme de la section du béton confiné ;
- rapport entre l’aire de la section confinée et celle de la section totale;
- vitesse de déformation ;
- armature transversale supplémentaire ;
- chargement cyclique ;
- caractéristiques des aciers ;
- intensité de l’effort normal;
- gradient de déformation (qui fait toujours l’objet de controverse).
L’état de déformation d’une structure dépend intimement des lois de comportement des
matériaux constitutifs. Une recherche intensive, expérimentale et analytique sur les
caractéristiques du béton confiné a été menée durant les trois dernières décennies; ce qui a
permis d’une part l’identification des paramètres principaux et d’autre part l’évaluation de leur
influence. Ces travaux ont été couronnés par l’élaboration de divers modèles[9-12].
5-3 Modélisation
5.3.1 Aperçu historique
Les premières recherches investies dans le comportement et la modélisation du béton confiné
ont montré que la résistance et la déformation longitudinale correspondante à un béton confiné
par une pression hydrostatique peut être exprimée par les relations suivantes :
l1'co
'cc fkff ;
'
co
l2cocc f
fk1
où 'ccf et cc désignent respectivement la résistance maximale et la déformation correspondante
sous l’action d’une pression hydrostatique latérale ; 'cof et co désignent respectivement la
121
résistance du béton non confiné et la déformation correspondante ; 1k et 2k sont des coefficients
fonction de la composition du béton et de l’étreinte latérale.
Suite aux résultats de leur essais expérimentaux, Richart et al [12] ont évalué moyennement les
coefficients 1k et 2k aux valeurs respectives 4.1 et 5 1k . Il a été également conclu que la
résistance du béton confiné par une pression hydrostatique passive est sensiblement égale à celle
d’un béton soumis à une pression passive latérale équivalente de confinement due à la présence
d’armature en spires étroitement espacées.
L’influence des armatures transversales sur le comportement des sections en béton armé a fait
l’objet d’une étude précoce menée par King[7]. Une formulation exprimant la résistance ultime
des sections de poteaux en béton armé a été établi, par contre la ductilité n’a bénéficié d’aucune
attention particulière.
Dans une étude destinée à vérifier la validité de la théorie des rotules plastiques dans les
portiques en béton armé, Chan [13]a montré l’importance du mode de rupture du noyau de béton
confiné par un ferraillage rectilinéaire.
En plus des effets bénéfiques dus à la capacité de rotation des rotules plastiques confinées dans
le calcul des structures hyperstatiques; Blume et al [7] ont indiqué l’avantage de l’utilisation du
béton confiné dans la conception sismique. Dans ce contexte, ils ont proposé des méthodes
d’estimation des moments et courbures ultimes, sans tenir compte de l’incidence de l’armature
de confinement.
Durant les années 60-70, les recherches sur le comportement du béton armé confiné ont été
essentiellement conduites sur des modèles réduits chargés de manière concentrique avec un taux
de déformation quasi-statique. Des études menées par Bertero et al [9], concernant les zones
comprimées (poteau - poutre) confinées par des armatures transversales ont permis de conclure
que de grandes courbures ultimes peuvent être atteintes. Kent et Park [9] ont été les pionniers à
formuler un tel modèle de comportement, en introduisant l’effet de confinement du béton par des
armatures transversales, ce qui s’est traduit par le redressement de la branche plastique de la
courbe et l’augmentation du raccourcissement ultime du béton, Figure 5.1. Ce modèle a été établi
en se basant surtout sur les résultats expérimentaux de Roy et Sozen [9], cependant il a été omis
de tenir compte de l’augmentation de la résistance due au confinement du béton.
122
Plus tard, durant la décennie 80, Scott et al [14] et Park et al.[10] ont mené des tests sur des
modèles à échelle réelle leur permettant de modifier et affiner le modèle Kent & Park en
introduisant un coefficient correcteur K pour tenir compte de l’amélioration de la résistance et la
ductilité due au confinement, et en incluant aussi l’influence de la vitesse de déformation.
Les années 80 ont été marquées par un travail de recherche intensif sur le confinement, où sur la
base d’un large data expérimental une variété de modèles contrainte-déformation du béton
confiné ont été développés en fonction de la paramétrisation utilisée. Uzumeri et Sheikh [11] ont
proposé un modèle similaire à celui de Kent & Park modifié, défini par quatre régions, Figure
5.2. Ce modèle a introduit la distribution des armatures longitudinales et la configuration des
armatures transversales, aboutissant ainsi à une meilleure prédiction que celle fournie par le
modèle de Kent & Park modifié, où la résistance et la ductilité sont surestimées [12].
Les travaux de recherche entrepris par l’école New Zélandaise ont été couronnés par
l’établissement d’un modèle unifié [12], simple d’application et couvrant toutes les formes de
section usuelles vu que les modèles précédents ne concernent que des configurations
particulières (rectangulaire ou circulaire). En plus, la formulation de ce modèle contient la notion
de contrainte latérale effective de confinement. En outre, Mander a élargi le domaine
d’applicabilité de ce modèle en modifiant les paramètres relatifs au chargement quasi-statique
( c,cc'cc E,f ) par des facteurs d’amplification dynamique, afin d’inclure l’effet de la vitesse de
chargement.
Une intéressante étude comparative de certains modèles représentatifs [15], où l’influence de
l’antécédent de déformation et la préfissuration initiale avec le concours du gradient de
déformation ont été considérés; a abouti aux conclusions suivantes :
- les modèles de Kent & Park et Uzemeri & Sheikh apparaissent plus appropriés pour l’étude
des éléments soumis au gradient de déformation bien qu’ils surestiment la capacité de
résistance des éléments initialement fissurés.
- la capacité de résistance des éléments préfissurés sous chargement cyclique peut être
convenablement prédite en utilisant le modèle de Thompson et Park. Cependant une bonne
convergence peut être obtenue à l’aide du modèle Kent & Park modifié si la courbe enveloppe
est recherchée.
123
Les années 90 ont vu l’extension des travaux de recherche au confinement du béton à haute
résistance (BHR) dont l’utilisation est devenue de plus en plus accrue. Les modèles relatifs au
béton à résistance ordinaire restent dans ce cas inadéquats, du moment que le BHR a un
comportement intrinsèque moins ductile. Cependant, les résultats expérimentaux obtenus [16-19]
ont montré qu’un BHR adéquatement confiné exhibe un comportement ductile satisfaisantavec
un gain significatif sur la résistance et la ductilité si une quantité d’armature transversale
appropriée est fournie. Se basant sur ces résultats, Cusson et Paultre [18] ont proposé un modèle
introduisant un indice de confinement effectif pour la modélisation de la branche descendante.
5.3.2 Modèles représentatifs
Quelques modèlesjugés représentatifs ont été sélectionnés d’une manière non restrictive, selon
que le béton est à haute résistance ou non.
A- Béton à résistance ordinaire (BRO) :
1- Kent & Park Modifié
Ce modèle a été originalement proposé par Kent et Park [9] et modifié par la suite par Park et al.
[10]. Cette modification a porté essentiellement sur l’introduction d’un coefficient K tenant
compte de l’effet du confinement sur l’amélioration de la résistance et la déformation ultime du
béton. Cette augmentation de la résistance est supposée égale à yhsh f. . La pente de la branche
descendante de la courbe a été maintenue jusqu’à 20% de la résistance maximale, au delà de
cette valeur la pente devient représentée par une ligne horizontale, comme l’illustre la Figure 5.3.
Ce modèle est régi par les équations suivantes:
- K002.0c
2cc'
coc K002.0K002.02
f.Kf
- K002.0c K002.0Z1Kff cm'coc '
coKf2.0
le terme
K002.0s
b43
1000f145
f29.03
5.0Z
nsh'
co
'co
m
définit la pente de la branche descendante dans le modèle corrigé ; avec'co
yhsh
f
f1K
124
2- Sheikh & Uzumeri
Le développement de ce modèle [11] est basé sur l’hypothèse stipulant que l’aire du béton
effectivement confinée, déterminée selon la distribution de l’armature longitudinale, la
configuration de l’armature transversale résultante et son espacement, est inférieure à l’aire du
noyau de béton. Ce modèle, indiqué par la Figure 5.2, a été ajusté par des résultats
expérimentaux sur des spécimens à échelle réelle sous sollicitation concentrique. Les équations
gouvernant le modèle établi pour des sections carrées et une distribution uniforme de l’armature
longitudinale sont comme suit :
),,f,(ff85.0f shsh'cocc
Ce modèle a été ultérieurement modifié pour tenir compte, de l’effet bénéfique du gradient de
déformation sur la ductilité, et de l’intensité de l’effort normal.
3- Mander & al:
Le modèle unifié [12], découlant des travaux de recherche entrepris par l’école NewZélandaise,
est caractérisé par la simplicité de son application et par sa couverture de toutes les formes de
section usuelles, Figure 5.4. La contrainte effective latérale de confinement, égale dans chaque
direction, a été trouvée fonction du rapport des résistances à la compression du béton confiné
'ccf et non confiné '
cof . Ce modèle est défini comme suit:
r
'cc
cm1r
mrff
où
cc
cm
et 25.1f
f0.2
f
f94.7125.2
f
f'co
'l
'co
'l
'co
'cc
La pression passive latérale de confinement ( le'l fkf ) déployée par l’armature transversale sur
le noyau du béton, résultante d’un état de compression triaxial, améliore nettement la résistance
à la compression et éventuellement le comportement ductile. Partant de ce fait, la déformation
longitudinale ultime de compression du béton confiné ne sera atteinte que par rupture de
l’armature transversale. Le paramètre ek représente le coefficient de confinement efficace
tenant compte de l’effet d’arc sur le béton inscrit entre l’armature transversale et l’armature
longitudinale.

125
4- Murat et al:
Le modèle [21], représenté par la Figure 5.5,a été développé à partir d’une synthèse des modèles
existants en introduisant l’influence du gradient de déformation. Ce modèle a été validé par un
large data expérimental, et il a été trouvé satisfaisant d’utilisation pour les sections où le gradient
de déformation est constant. Les relations le régissant sont les suivantes :
'cc
K211
2
cc
c
cc
c'ccc f2ff
avec le1'co
'cc fkff
où'co
le1
f
fkK représente l’indice de confinement effectif
Les divers modèles analytiques présentés semblent adopter le même principe que celui du
modèle de Kent & Park modifié sauf que chacun a incorporé ses propres variables affectant le
comportement contrainte-déformation du béton confiné. Cependant, le modèle de Mander & al.
apparaît le modèle le plus approprié du moment qu’il présente une simplification par rapport aux
modèles précédents en l’unifiant pour dessections circulaires et rectangulaires. En plus, ce
modèle décrit une courbe contrainte déformation continue, en s’articulant sur une formulation
mathématique simplifiée; ce qui lui a permis par ailleurs d’être communément repris et affiné
dans plusieurs travaux ultérieurs.
5- Bousalem & Chikh
Ce modèle [22] a été fondamentalement basé sur l’observation des résultats d’essais
expérimentaux menés durant les deux dernières décennies. Une courbe typique contrainte
déformation déterminée par le modèle proposé est schématiquement représentée dans la figure
5.6. Les essais ont prouvé que le comportement du béton en compression dépend de sa richesse
en confinement généré incontestablement par une disposition adéquate de l’armature
transversale, résultant en un accroissement aussi bien en capacité de résistance qu’en capacité de
déformation.
ncc
c x1nxnf
f
etcc
cx
1nnf
Ecc
ccc
etccccc
ccc
fEE
n

126
avec 3coc f11000E selon le CBA 93 [23], module d'élasticité longitudinal du béton
L'examen des coordonnées des points sur la ligne tombante montre que l'équation de la partie
descendante peut s'écrire: cccsoftccc Eff ccf3.0
où Esoft est la valeur contrôlant la pente de la partie descendante
Fig. 5.6 Courbe contrainte–déformation pour béton confiné
La formulation mathématique de la relation contrainte - déformation renferme les
caractéristiques suivantes :
1. le gain en résistance défini par le paramètre coccs ffK exprimant le rapport des
contraintes pics du béton confiné et non confiné
2. le gain en déformation défini par le paramètre coccdK exprimant le rapport des
déformations pics du béton confiné et non confiné
3. la pente de la branche descendante définie par la valeur softE
Expressions de Ks et Kd
Tableau 5.1 Facteurs d'accroissement des gains en résistance et en déformation
Section Ks Kd
Rectangulaireco
yhshe
f
fk4.01
co
yhshe
f
fk7.21
Circulaireco
yhshe
f
fk8.11
co
yhshe
f
fk5.101
cof
ccf3.0
co cc cuDéformation axiale
Béton confiné
Béton nonconfiné
Con
trai
nte
axia
le
ccf
c
cf
127
Taux d'adoucissement yhshe2cosoft fkf4E
Coefficient ke
B- Béton à haute résistance (BHR) :
Les modèles relatifs au béton à haute résistance sont relativement rares dans la littérature, et les
travaux récemment publiés ont montré que la nécessité d’établir un modèle analytique pour le
BHR s’impose. Divers travaux expérimentaux ont été entrepris pour servir comme base
référentielle afin d’apporter les corrections indispensables sur des modèles préformulés. On
constate que la formulation de ces derniers est très similaire à celle spécifique au BRO. Les
modèles se rapportant au BHR sont issus, comme pour le BRO, des deux principales écoles :
américaine (Shamin Sheikh et al.) et new zélandaise (Park et al.).
Dans ce contexte, Cusson et Paultre [20] ont proposé un modèle, Figure 5.7, s’inspirant des
modèles de Mander &t al. et de Fafitis & al.[24] et des résultats obtenu par Nagashima et al,
conduits sur 52 spécimens à échelle réelle ; pour décrire respectivement la partie ascendante et
descendante de la courbe contrainte-déformation, en introduisant un indice de confinement
effectif pour tenir compte de l’incidence de la résistance du béton, afin d’apprécier le gain sur la
résistance et la ductilité. Les équations caractérisant ce modèle sont les suivantes :
ccc r
'cc
cm1r
mrff
avec
cc
cm
ccc
2k
ccc1k'ccc e.ff
1k et 2k désignent respectivement le coefficient contrôlant la pente et la courbure de la branche
descendante. Il a été expérimentalement [16,20] constaté que le comportement du BHR est
Section Type de confinement
cerces spirescirculaire
cc
2
s'
e 1
ds5.01k
cc
s'
e 1
ds5.01k
rectangulaire
cc
c
'
c
'n
1i cc
2i
e 1
hs
5.01bs
5.01hb
C1
k
128
caractérisé par une désintégration brutale du béton d’enrobage. Cependant un gain significatif de
résistance (50 à 100%) et de ductilité (10 à 20%) a été enregistré au sein du noyau des
échantillons soigneusement confinés en comparaison avec ceux non confinés. La rupture des
éléments en BHR est régie par la formation de surfaces de cisaillement dans le plan incliné le
plus défavorisé, séparant le noyau en deux coins. L’inclinaison du plan de cisaillement par
rapport à l’axe vertical variait entre 25° et 45°, respectivement pour les spécimens faiblement et
hautement confinés.
Il a été observé que l’efficacité du confinement sur le BHR n’est pas aussi prononcée
comparativement à celle enregistrée sur le BRO. Cependant des gains non négligeables sur la
résistance et la ductilité peuvent être réalisés à travers une disposition minutieuse de l’armature
longitudinale et transversale. En outre, il a été noté par ailleurs [25] que :
- la déformation de l’armature de confinement est inversement proportionnelle avec
l’augmentation de son espacement, résultant ainsi à une amélioration relative de la
résistance.
- l’influence de l’armature transversale sur l’amélioration de la résistance diminue avec
l’accroissement de la résistance à la compression du BHR.
A la lumière des résultats produits par les diverses études indiquées précédemment, il a été
conclu que les paramètres suivants affectent positivement le confinement, à savoir :
- l’espacement approprié de l’armature transversale;
- la distribution adéquate de l’armature longitudinale autour du périmètre de la section;
- l’augmentation du rapport volumétrique de l’acier transversal sur le noyau du béton;
- l’augmentation de la contrainte élastique de l’acier transversal;
- l’utilisation de l’armature en spire à la place de l’armature rectangulaire.
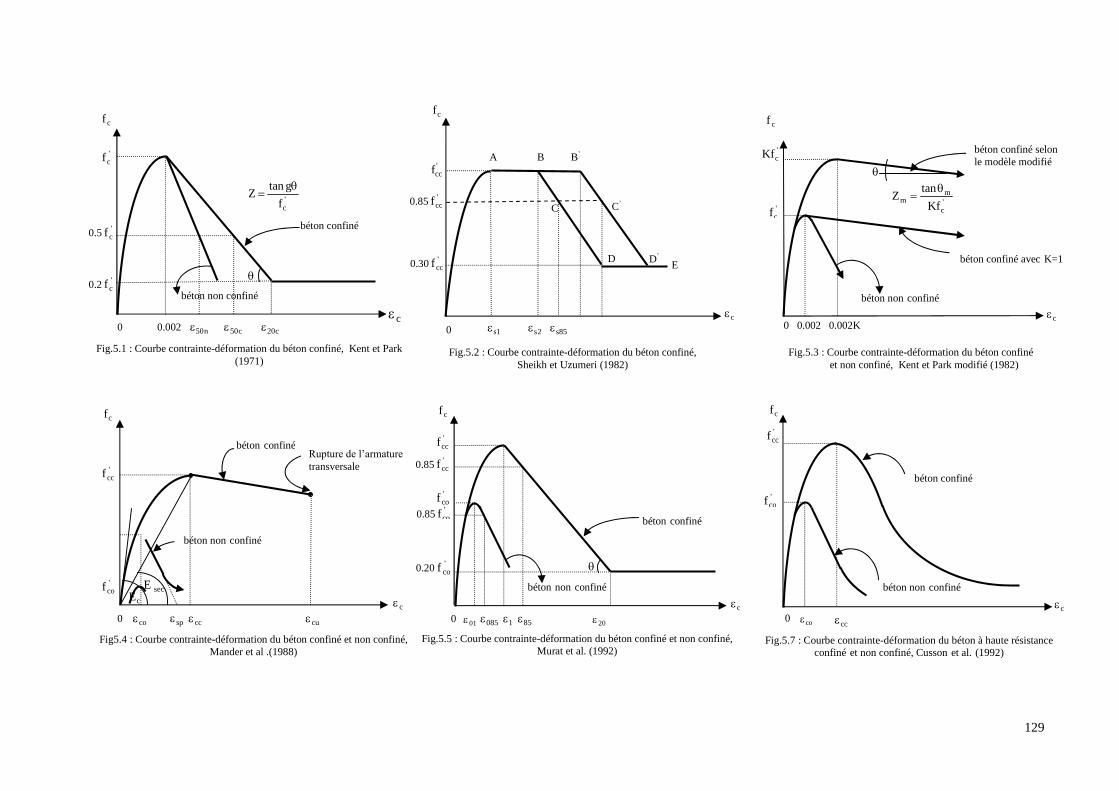
129
'cof
'ccf
secE
c
cf
0.5 'cf
0.2 'cf
'cfgtan
Z
béton confiné
béton non confiné
0 0.002 n50 c50 c20
Fig.5.1 : Courbe contrainte-déformation du béton confiné, Kent et Park(1971)
'cf
c
cf
Fig5.4 : Courbe contrainte-déformation du béton confiné et non confiné,Mander et al .(1988)
béton non confiné
béton confinéRupture de l’armature transversale
c
cf
0.85 'ccf
1s 2s 85s
Fig.5.2 : Courbe contrainte-déformation du béton confiné,Sheikh et Uzumeri (1982)
'ccf
0.30 'ccf
0
A B B’
C’
D’ D
C
E
c
béton confiné avec K=1
béton non confiné
0 0.002 0.002K
Fig.5.3 : Courbe contrainte-déformation du béton confinéet non confiné, Kent et Park modifié (1982)
'cKf
'cf
béton confiné selonle modèle modifié
'c
mm Kf
tanZ
cf
c
cf
béton confiné
béton non confiné
0 01 085 1 85 20
'ccf
0.85 'cof
c
cf
béton confiné
béton non confiné
0 co
Fig.5.7 : Courbe contrainte-déformation du béton à haute résistanceconfiné et non confiné, Cusson et al. (1992)
'ccf
'cof
cc
cE
0 co sp cc cu
'cof
0.20 'cof
0.85 'ccf
Fig.5.5 : Courbe contrainte-déformation du béton confiné et non confiné,Murat et al. (1992)
130
En considérant l’incidence de la résistance du béton sur la performance des éléments fléchies, les
remarques suivantes sont émises [26] :
- bien que le BHR présente une pente raide en compression, les éléments fléchis en BHR
exhibent une ductilité plus grande comparativement à celle des éléments en béton à
résistance ordinaire.
- les résultats des essais sur les éléments en BHR et en BRO ont montré des allures
qualitativement similaires pour des quantités identiques d’armature comprimée, tendue et
de confinement du noyau de béton.
- les éléments en BHR sont moins sensibles au confinement que ceux en BRO à cause de la
moindre dilatation volumétrique.
Il faut souligner qu’afin d’apprécier au mieux le gain en résistance et ductilité, le degré de
confinement est caractérisé par l’indice de confinement effectif[20] :'co
le
f
f .
Effet de la flexibilité de l’acier transversal
Malgré que l’influence de la rigidité flexionnelle du périmètre de l’acier transversal sur la
pression de confinement a été étudiée expérimentalement, très peu de chercheurs se sont penchés
sur ce problème pour le résoudre analytiquement.
Sous l’action d’une déformation axiale, la contrainte dans l’armature transversale produisant la
pression passive de confinement dépend de l’expansion latérale du noyau de béton et de la
flexibilité de l’armature transversale. Pour ce, il devient nécessaire de prendre en considération
l’interaction entre la déformation du noyau de béton et celle de l’armature transversale afin de
prédire fidèlement le comportement des poteaux en béton armé.
Evitant la complexité du problème, la majorité des chercheurs ont utilisé des modèles
approximatifs pour évaluer la pression effective de confinement exercée par l’armature
transversale sur le noyau du béton. Sheikh et Uzumeri (1982), Mander et al (1988) ont utilisé le
concept de l’aire de béton effectivement confiné pour déterminer le coefficient d’efficacité Ke
défini comme étant le rapport de la pression effective latérale sur la valeur nominale obtenue à
partir de la condition d’équilibre. Saatcioglu et Razvi (1992) ont proposé une formule empirique
basée sur l’analyse en régression des résultats expérimentaux afin de déterminer ce coefficient.

131
Les 2 approches considèrent implicitement ou explicitement que le périmètre et les angles de
l’armature transversale atteignent l’écoulement au pic de la réponse.
Une méthode rationnelle a été introduite par Cusson et Paultre [20] basée sur la compatibilité de
déformation et l’équilibre des forces afin d’obtenir la relation contrainte –déformation pour
poteaux carrés en béton ordinaire et béton à haute résistance. Le poteau carré est remplacé dans
cette alternative par un poteau circulaire équivalent où c’est uniquement l’allongement des
cerces qui est pris en considération, cependant une procédure itérative est nécessaire pour
déterminer la contrainte dans l’armature transversale correspondante à la résistance de
confinement max. Une approche simple basée sur l’analyse par régression des résultats
expérimentaux a été proposée par Razvi et Saatcioglu (1999) pour déterminer cette contrainte, et
une formule empirique a été donnée pour cette fin, évitant ainsi les longues itérations. Il faut par
ailleurs signaler que la pression non uniforme de confinement, distribuée sur la hauteur du
poteau a été transformée en contrainte équivalente fournie par une enveloppe circulaire
équivalente, utilisant le concept d’énergie de déformation. L’étude menée par Teerawong et al
[27] a permis de présenter une procédure rationnelle pour déterminer l’augmentation de la
résistance pour des poteaux carrés en béton normal et béton à haute résistance sous chargement
vertical en prenant en compte l’interaction entre noyau de béton - armature transversale et la
variation de la contrainte de confinement le long de la hauteur du poteau. L’effet de la flexibilité
du périmètre de l’armature transversale a été directement inclus dans cette étude, cependant le
flambement des barres longitudinales n’a pas été considéré.
5-4 Ductilité locale et notion de longueur de confinement
La demande de ductilité est mieux appréciée à travers le coefficient de ductilité de courbure ,
dicté par le comportement moment-courbure de la section, par conséquent le choix d’un modèle
approprié est nécessaire afin de pouvoir prédire ce comportement. La rotulation dans les zones
dissipatives d’énergie est atteinte suite à la diffusion de la plastification à travers une longueur
potentielle dite longueur de rotule plastique. Celle ci est définie comme étant la longueur
équivalente de la rotule plastique au-delà de laquelle la courbure plastique sera considérée
comme constante, Figure 5.8, et elle est principalement influencée par la demande de ductilité de
courbure . Un travail de recherche intensif [5-7] a été effectué dans ce domaine et a été
couronné par la formulation d’expressions semiempiriques conduisant à une multitude de
résultats dispersés selon le modèle théorique préétabli.
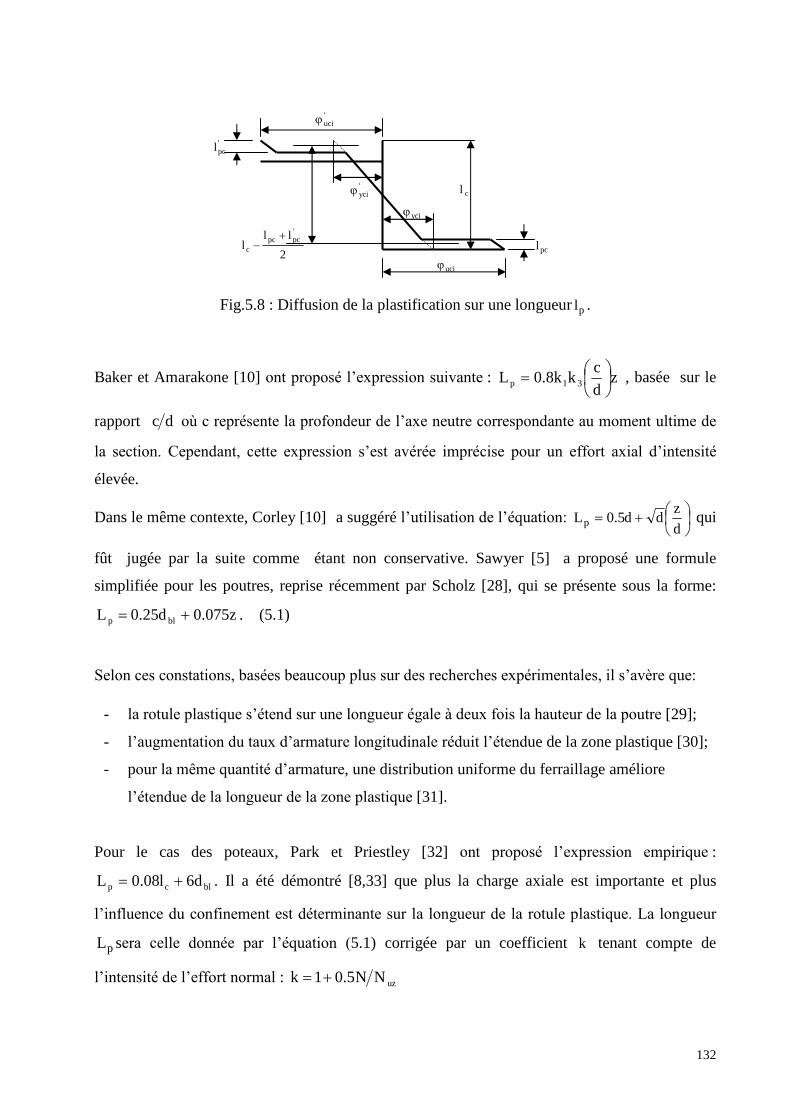
132
Fig.5.8 : Diffusion de la plastification sur une longueur pl .
Baker et Amarakone [10] ont proposé l’expression suivante: zdc
kk8.0L 31p
, basée sur le
rapport dc où c représente la profondeur de l’axe neutre correspondante au moment ultime de
la section. Cependant, cette expression s’est avérée imprécise pour un effort axial d’intensité
élevée.
Dans le même contexte, Corley [10] a suggéré l’utilisation de l’équation:
dz
dd5.0Lp qui
fût jugée par la suite comme étant non conservative. Sawyer [5] a proposé une formule
simplifiée pour les poutres, reprise récemment par Scholz [28], qui se présente sous la forme:
z075.0d25.0L blp . (5.1)
Selon ces constations, basées beaucoup plus sur des recherches expérimentales, il s’avère que:
- la rotule plastique s’étend sur une longueur égale à deux fois la hauteur de la poutre[29];
- l’augmentation du taux d’armature longitudinale réduit l’étendue de la zone plastique [30];
- pour la même quantité d’armature, une distribution uniforme du ferraillage améliore
l’étendue de la longueur de la zone plastique[31].
Pour le cas des poteaux, Park et Priestley [32] ont proposé l’expression empirique:
blcp d6l08.0L . Il a été démontré [8,33] que plus la charge axiale est importante et plus
l’influence du confinement est déterminante sur la longueur de la rotule plastique. La longueur
pL sera celle donnée par l’équation (5.1) corrigée par un coefficient k tenant compte de
l’intensité de l’effort normal: uzNN5.01k
'pcl
pcl
yci
'yci cl
uci
'uci
2
lll
'pcpc
c

133
Récemment, et sur la base d’une multitude de résultats expérimentaux, Watson et al.[34] ont
proposé la loi :g
'co
ecc
AfP
8.21hL
. Il s’estavéré que cette équation est conservative pour
l’évaluation de la longueur de confinement, et ce pour le cas général de poteaux.
Le RPA a fait abstraction à cette notion de longueur plastique Lp du fait que la relation moment–
courbure des sections a été établie sur la base d’un seul niveau de ductilité. Cependant, il spécifie
une longueur de confinement cL , similaire à celle proposée par le code ACI. L’EC-8 quand à
lui recommande des valeurs de la longueur de confinement respectivement pour les poteaux ainsi
que les poutres, selon la classe de ductilité considérée. Le tableau suivant résume les expressions
des longueurs de confinement Lc selon différents règlements:
Codes Poteaux Poutres
RPA )mm600,b,h,6lmax( ccc
bh2
ACI )mm450,h,6lmax( cc
bh2
NZS*
g'coe A.f3.0P , ,h(maxL c
p zone comprise entre uM et uM8.0 )
eP g'co A.f3.0 , ,h5.1(maxL c
p zone comprise entre uM et uM7.0 )
pcp L3LL2
bh2
EC-8
mm600,h5.1,5l
max cc ‘H’
mm450,h5.1,
6l
max cc ‘M’
mm450,h,
6lc
max c ‘L’
bh.2 ‘H’
bh.5.1 ‘M’
bh ‘L’
*critiqué par Watson et al.[34]

134
5-5 Capacité flexionnelle : Analyse Moment - Courbure
a) Courbure d’une section rectangulaire soumise à une flexion croissante
La ductilité de courbure est directement liée aux sections dont le mode de travail est par flexion.
En effet, sous l'action d’un moment, ou d’un moment plus un effort axial l’élément a tendance à
fléchir. En d'autres termes, l’élément prend la forme d'une ligne fléchie, qui fait partie d'un
grand cercle. Considérons un élément différentiel de longueur dx d’un élément en béton armé de
section rectangulaire, comme représenté sur la figure 5.9, Park et Paulay [5], la rotation entre
les extrémités est donnée par :
)k1(ddx
kddx
Rdx sc
c
Où k est un facteur définissant la position relative de l'axe neutre. Dans l'équation ci-dessus, Rc
définit le rayon du cercle dont l’élément fait partie, et la courbure par définition est l’inverse de
Rc. Si nous divisons cette équation par la longueur de l'élément dx, on aura:
)k1(dkdR1 sc
c
Par conséquent, la courbure d'un élément (ou la rotation par unité de longueur d'un élément) est
défini comme:
d)k1(dkdscsc
Fig. 5.9 Déformations dans un élément fléchi de longueur dx Déformations
Axe neutre
M
Acier
Rc
d
Acier
Fissure
M
PP
Axe neutre
kd
c
s

135
En d'autres termes, la courbure d'une section est la pente de son diagramme de déformation, et
elle peut être mesurée en utilisant la déformation du béton ou de l’acier. La relation entre le
moment et la courbure est donnée par l’équation classique:
M
M REI d’où EIM
En réalité, quand nous avons un moment de flexion sollicitant une section en béton armée,
l’élément fléchi n'a pas une courbure uniforme sur sa longueur, puisqu'il y a une fluctuation dans
la position de l'axe neutre due à la formation aléatoire des fissures. Quant à la définition donnée
ci-dessus concernant la courbure d'élément de longueur dx, et en supposant que cet élément est
fissuré, la courbure est donc exprimée en fonction des taux de déformations dans le béton et
l’acier. Comme la ductilité est définie comme étant le rapport des courbures de deux états
différents de l’élément fléchi, nous pouvons alors conclure que cette ductilité dépend de la
déformation, donc plus la déformation est grande, plus la ductilité est grande.
b) Hypothèses de calcul
La dérivation des relations moment-courbure des sections confinées en béton armé a pris en
considération les facteurs suivants :
1. Intensité de l’effort axial,
2. Taux d'acier transversal, sh
3. Résistance du béton, fco
4. Taux d'acier longitudinal, l
5. Limite élastique de l’acier transversal, fyh
Les hypothèses sur lesquelles s’articule cette analyse sont les suivantes:
- Les sections planes restent planes après déformation,
- La résistance à la traction du béton est négligée,
- Les contraintes dans le béton sont dérivées des courbes appropriées contrainte - déformation
respectivement pour le béton confiné (modèle proposé) et non confiné (CBA 93), voire
figure 5.10
- Les contraintes dans les aciers longitudinaux sont dérivées de la courbe contrainte
déformation en utilisant le modèle de Mander et al, figure 5.11

136
- L'état limite ultime est atteint quand l’une des trois limites est atteinte:
la déformation du béton dans la fibre la plus comprimée atteint la valeur indiquée.
la déformation dans l’acier atteint la valeur indiquée.
le moment de flexion est limité à la valeur de 0.8 Mmax.
Modèle contrainte déformation du béton non confiné:
La courbe contrainte déformation du béton non confiné est illustrée dans la figure 5.10.
Pour
le calcul de la contrainte dans le béton non confiné on utilise le diagramme non linéaire dit
"parabole rectangle", Fig.5.10 (C.B.A93/A.4.3.4). Le diagramme parabole rectangle est constitué
d’un arc de parabole depuis l'origine des coordonnées jusqu’à son sommet de coordonnées bc =
2‰, prolongé par un palier d’ordonnée:
cjbc f85.0f
L’expression graphique du diagramme est donnée par les relations suivantes:
- si 20 bc ‰ )104(10f25.0f bc3
bc3
bcubc
- si 2‰ bc 3.5 ‰ bcubc ff
avec cjbcu f85.0f
Le coefficient 0.85 a pour objet de tenir compte de ce que la résistance du béton est fonction
décroissante de la durée d'application de la charge.
bc
cjbcu f85.0f
bcf
2 ‰ 3.5 ‰
Fig. 5.10 Modèle du béton non confiné

137
Modèle contrainte déformation de l’acier longitudinal
Modèle de Mander et al.
La courbe contrainte déformation déduite des essais expérimentaux est idéalisée en une région
élastique, un plateau d’écoulement et une région d’écrouissage, comme illustrée dans la figure
5.11. La courbe contrainte déformation dans la zone d’écrouissage ( sussh ) peut être
convenablement prédit par la relation :
P
shsu
ssuysusus )ff(ff
où
ysu
shsush ff
EP
Fig.5.11 Modèle contrainte - déformation de l'acier longitudinal
Watson et al. [34] ont montré que la déformation limite de l’acier en compression suc est
fonction du rapport bds . Les valeurs de suc ont été déterminées par Zahn et al. [30]. Basé sur
un modèle de flambement, une expression du rapport de l’élancement géométrique limitant le
flambement des barres comprimées était dérivée sous la forme :
suc
r
b fE
5.1ds (5.2)
où Er est le module réduit et fsuc la contrainte de flambement.
Ainsi la valeur bds exigée pour le contrôle du flambement de la barre peut être déterminée à
partir de l’expression 5.2 moyennant la courbe contrainte déformation de l’acier et soit la
déformation en compression suc ou la contrainte en compression fsuc correspondant au
flambement.
s
sf
y sh su
yf
suf
Es
Esh
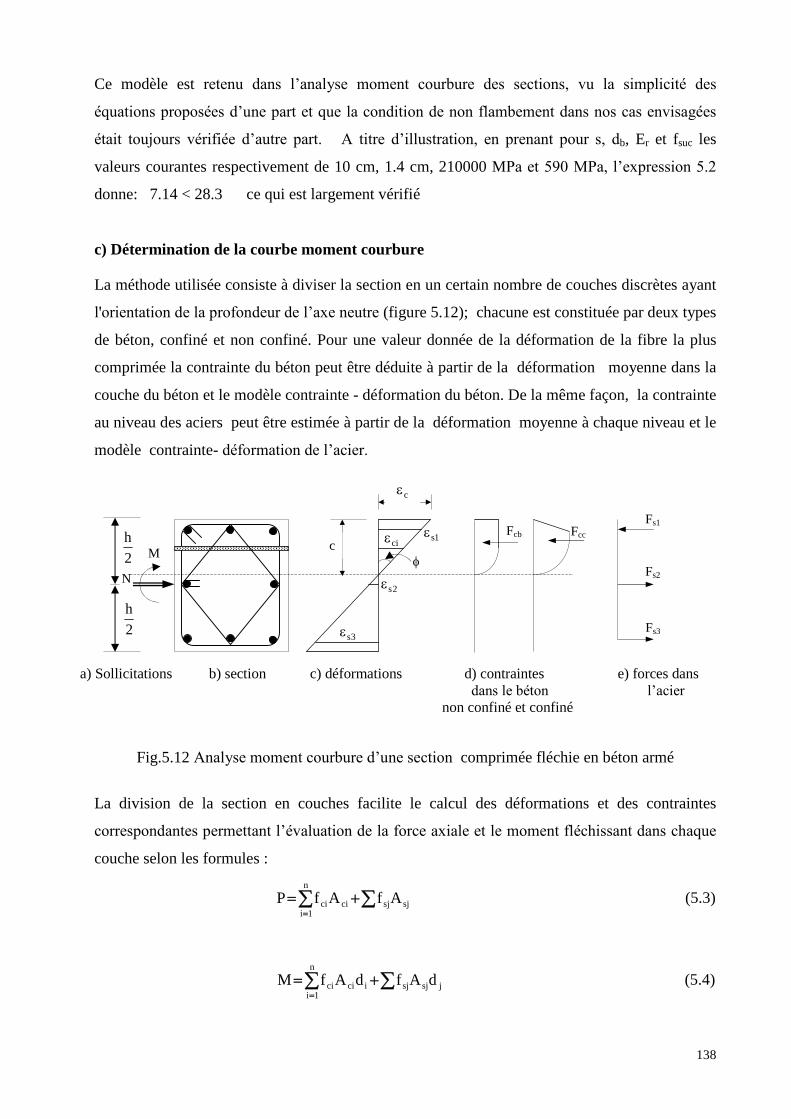
138
Ce modèle est retenu dans l’analyse moment courbure des sections, vu la simplicité des
équations proposées d’une part et que la condition de non flambement dans nos cas envisagées
était toujours vérifiée d’autre part. A titre d’illustration, en prenant pour s, db, Er et fsuc les
valeurs courantes respectivement de 10 cm, 1.4 cm, 210000 MPa et 590 MPa, l’expression 5.2
donne: 7.14 < 28.3 ce qui est largement vérifié
c) Détermination de la courbe moment courbure
La méthode utilisée consiste à diviser la section en un certain nombre de couches discrètes ayant
l'orientation de la profondeur de l’axe neutre(figure 5.12); chacune est constituée par deux types
de béton, confiné et non confiné. Pour une valeur donnée de la déformation de la fibre la plus
comprimée la contrainte du béton peut être déduite à partir de la déformation moyenne dans la
couche du béton et le modèle contrainte - déformation du béton. De la même façon, la contrainte
au niveau des aciers peut être estimée à partir de la déformation moyenne à chaque niveau et le
modèle contrainte-déformation de l’acier.
Fig.5.12Analyse moment courbure d’une section comprimée fléchie en béton armé
La division de la section en couches facilite le calcul des déformations et des contraintes
correspondantes permettant l’évaluation de la force axiale et le moment fléchissant dans chaque
couche selon les formules :
n
1isjsjcici AfAfP (5.3)
n
1ijsjsjicici dAfdAfM (5.4)
a) Sollicitations b) section c) déformations d) contraintes e) forces dansdans le béton l’acier
non confiné et confiné
c
1s
2s
3s
cicFcb Fcc
Fs1
Fs2
Fs3
2h
2h
M
N
139
Le calcul proprement dit s’avère laborieux et nécessite l’apport d’un outil informatique. Dans ce
sens un programme informatique en Visual Basic 6 a été développé s’appuyant sur
l’organigramme 5.1 et l’algorithme suivant:
a) spécifier la géométrie de la section ainsi que les caractéristiques des matériaux.
b) Calculer la valeur de l’effort axial ultime que peut reprendre la section selon la relation
suivante :
ysmaxcsc0 fAf)AA(P (5.5)
où cA : est la section totale du béton confiné.
sA : est la section de l’acier longitudinale.
maxcf : est la résistance maximum du béton.
yf : est la résistance d’écoulement de l’acier.
La procédure prendra fin si l’effort axial appliqué dépasse la valeur de l’effort axial ultime 0P
que peut reprendre la section.
c) calculer la valeur de la déformation dans la section sous l’effet de la charge axiale
seulement.
d) Assigner une valeur initiale de la déformation du béton à la fibre la plus comprimée.
e) Assigner une valeur initiale de la courbure.
f) Diviser la section en un certain nombre de couches discrètes, et en utilisant le principe de
Bernoulli, calculer les déformations au centre de chaque couche de béton et chaque niveau de
ferraillage en fonction de la déformation max du béton.
g) Trouver les contraintes dans chaque couche du béton et de l’acier enutilisant les modèles
appropriés.
h) Déterminer les forces internes en additionnant la contribution des couches du béton et les
forces d'acier dans les différents niveaux.
i) Calculer la force axiale de l'équilibre en utilisant la relation (5.3) et la comparer avec la
charge axiale appliquée. Si la différence est inférieure ou égal à une tolérance spécifiée, les
résultats sont acceptables, calculer la valeur du moment en utilisant l’équation (5.4) (les valeurs
moment et courbure deviendront un point dans la courbe M-). Sinon, ajuster la valeur de la
courbure et revenir à l'étape f. si la convergence ne se produit pas dans 500 itérations, assigner
une nouvelle valeur de déformation et revenir à l'étape e.
j) Vérifier si la condition d’écoulement est atteinte. Si elle est atteinte afficher la valeur du
moment élastique et la courbure élastique.
k) Vérifier si la condition ultime est atteinte. Si elle est atteinte par écoulement des aciers,
calculer la ductilité et afficher le message puis sortir de la procédure. Sinon revenir à l'étape d.
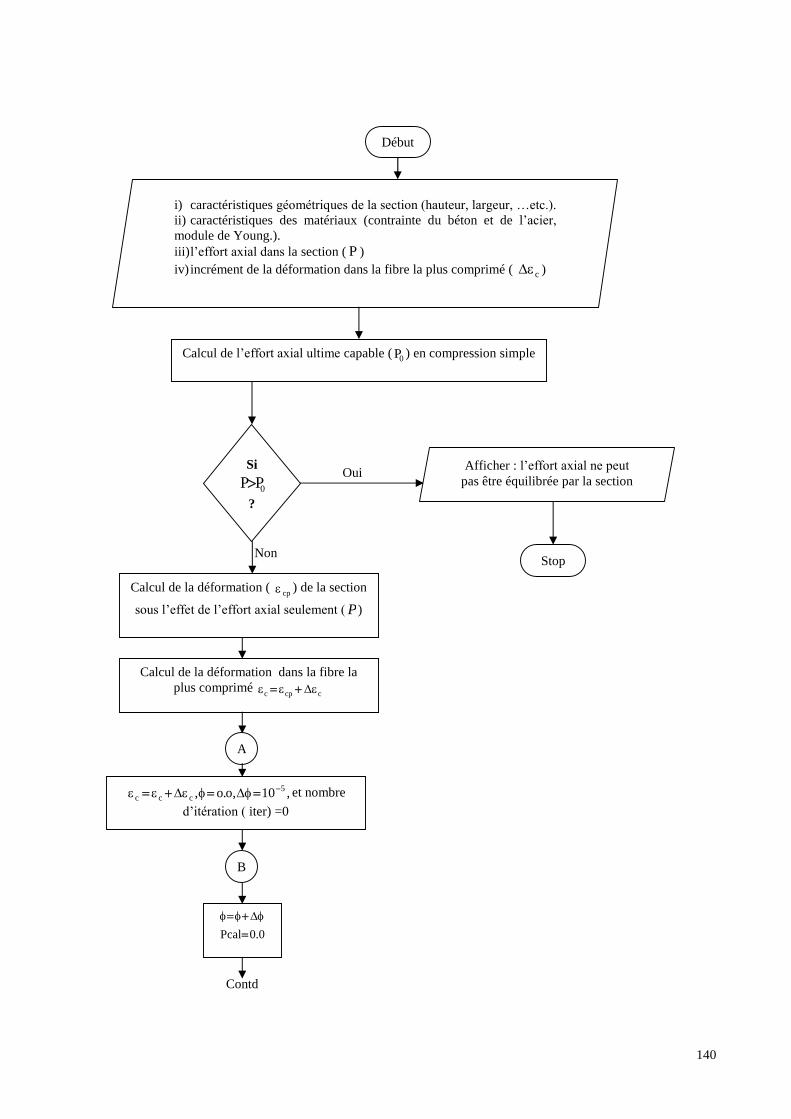
140
Calcul de la déformation dans la fibre laplus comprimé ccpc
A
B
,10,o.o, 5ccc
et nombred’itération (iter) =0
0.0Pcal
Contd
Oui
Non
Calcul de l’effort axial ultime capable ( 0P ) en compression simple
i) caractéristiques géométriques de la section (hauteur, largeur, …etc.). ii) caractéristiques des matériaux (contrainte du béton et de l’acier, module de Young.).iii)l’effort axial dansla section ( P )iv) incrément de la déformation dans la fibre la plus comprimé ( c )
Début
Si
0PP?
Afficher :l’effort axial ne peut pas être équilibrée par la section
Stop
Calcul de la déformation ( cp ) de la section
sous l’effet de l’effort axial seulement (P)
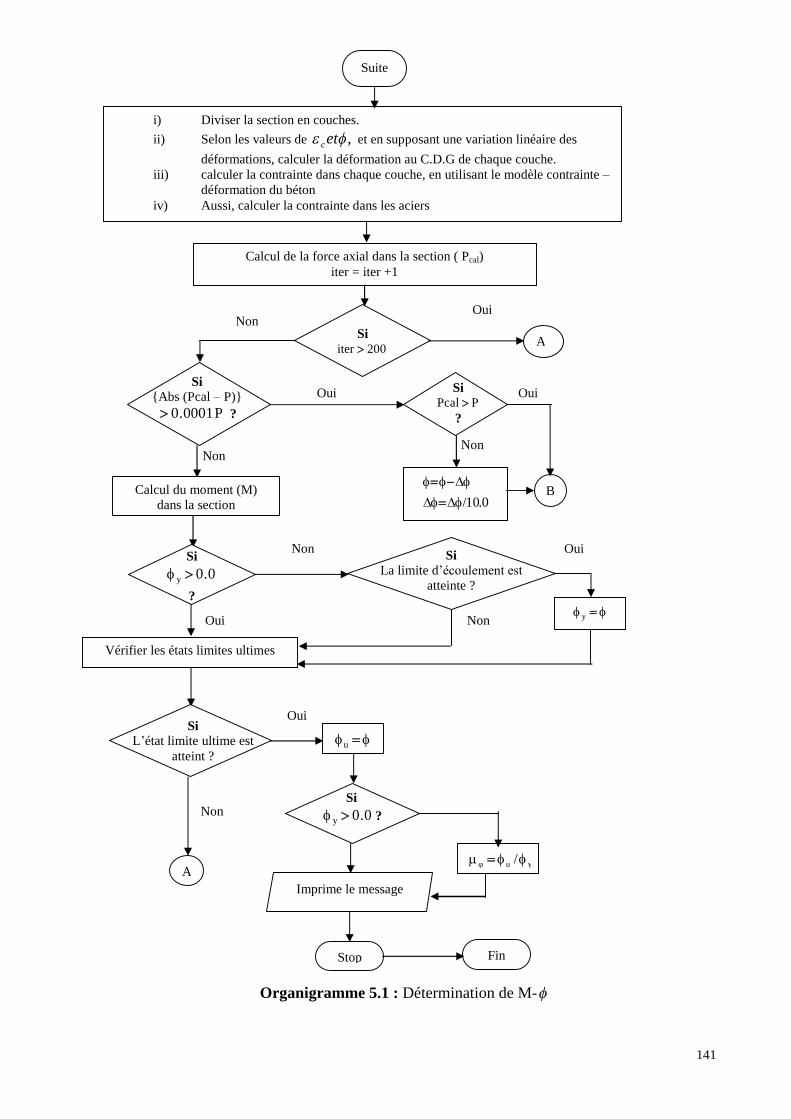
141
Organigramme 5.1 : Détermination de M-
Non
yu /
Stop Fin
Imprime le message
Non
Vérifier les états limites ultimes
Ouiy
Oui
Calcul du moment (M)dans la section
Non
i) Diviser la section en couches.ii) Selon les valeurs de ,etc et en supposant une variation linéaire des
déformations, calculer la déformation au C.D.G de chaque couche.iii) calculer la contrainte dans chaque couche, en utilisant le modèle contrainte–
déformation du bétoniv) Aussi, calculer la contrainte dans les aciers
Suite
Calcul de la force axial dans la section ( Pcal)iter = iter +1
Si200iter
OuiNon
A
0.10/
Non
Oui Oui
B
Si{Abs (Pcal –P)}
P0001.0 ?
SiPPcal
?
Si0.0y
?
SiLa limite d’écoulement est
atteinte ?
u
A
Non
OuiSi
L’état limite ultime estatteint ?
Si0.0y ?
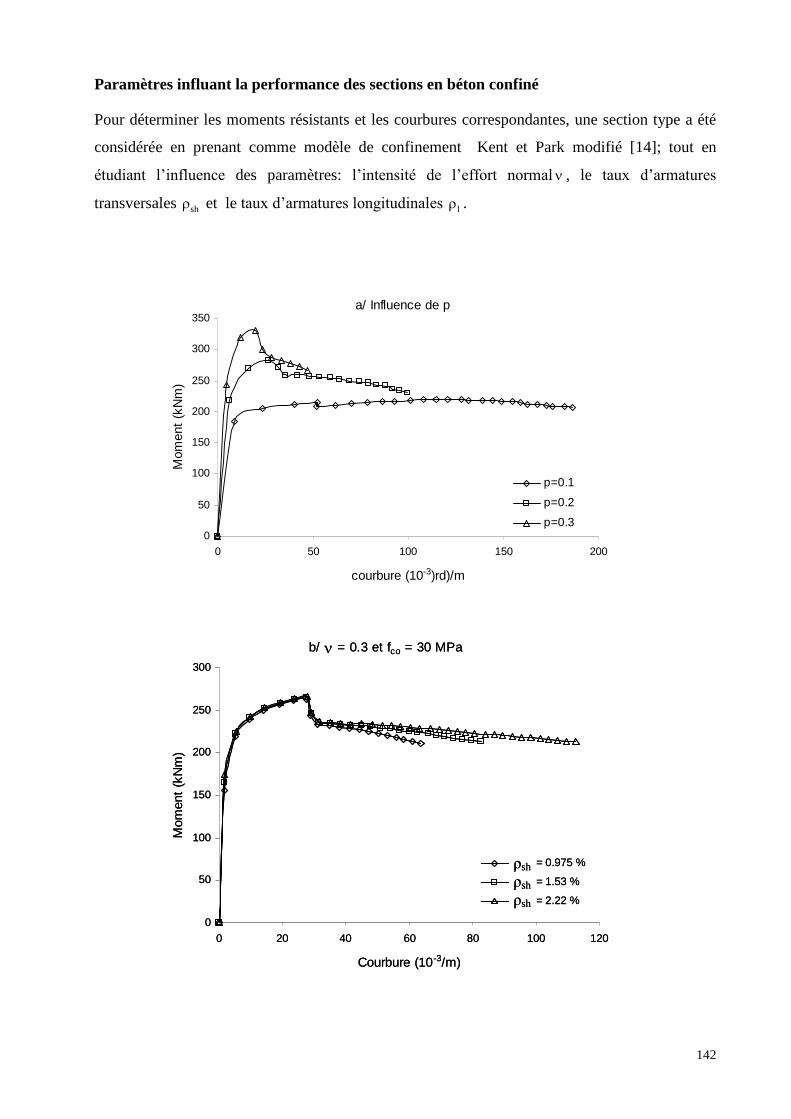
142
Paramètres influant la performance des sections en béton confiné
Pour déterminer les moments résistants et les courbures correspondantes, une section type a été
considérée en prenant comme modèle de confinement Kent et Park modifié [14]; tout en
étudiant l’influencedes paramètres: l’intensité de l’effort normal, le taux d’armatures
transversales sh et letaux d’armatures longitudinales l.
b/ = 0.3 et fco = 30 MPa
0
50
100
150
200
250
300
0 20 40 60 80 100 120
Courbure (10-3/m)
Mom
ent
(kN
m)
= 0.975 %
= 1.53 %
= 2.22 %
ρsh
ρsh
ρsh
b/ = 0.3 et fco = 30 MPa
0
50
100
150
200
250
300
0 20 40 60 80 100 120
Courbure (10-3/m)
Mom
ent
(kN
m)
= 0.975 %
= 1.53 %
= 2.22 %
ρsh
ρsh
ρsh
a/ Influence de p
0
50
100
150
200
250
300
350
0 50 100 150 200
courbure (10-3)rd)/m
Mom
ent
(kN
m)
p=0.1
p=0.2
p=0.3
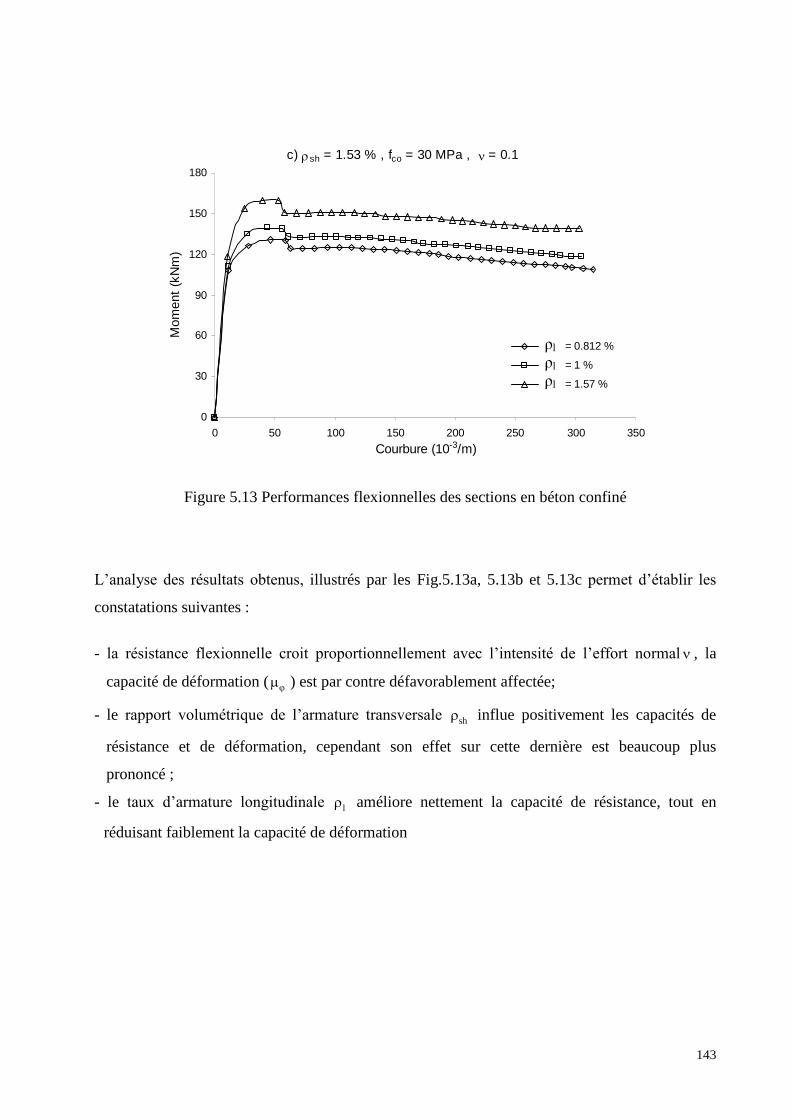
143
Figure 5.13 Performances flexionnelles des sections en béton confiné
L’analyse des résultats obtenus, illustrés par les Fig.5.13a, 5.13b et 5.13c permet d’établir les
constatations suivantes :
- la résistance flexionnelle croit proportionnellement avec l’intensité de l’effort normal, la
capacité de déformation ( ) est par contre défavorablement affectée;
- le rapport volumétrique de l’armature transversale sh influe positivement les capacités de
résistance et de déformation, cependant son effet sur cette dernière est beaucoup plus
prononcé ;
- le taux d’armature longitudinale l améliore nettement la capacité de résistance, tout en
réduisant faiblement la capacité de déformation
c) sh = 1.53 % , fco = 30 MPa , = 0.1
0
30
60
90
120
150
180
0 50 100 150 200 250 300 350
Courbure (10-3/m)
Mom
ent
(kN
m)
= 0.812 %
= 1 %
= 1.57 %
ρl
ρl
ρl
144
5-7 Conclusions
Sachant que le confinement a une incidence favorable sur la performance du béton en améliorant
sa résistance et sa ductilité; un modèle approprié pour l’analyse du comportement moment-
courbure des sections s’avère nécessaire afin de prédire fidèlement la ductilité de courbure. Il en
ressort des différents travaux de recherche réalisés que les paramètres suivants affectent
positivement le confinement, notamment:
- l’espacement adéquat de l’armature transversale
- l’augmentation du rapport volumétrique et de la contrainte élastique de l’acier transversal
- configuration convenable de l’armature longitudinale autour du périmètre de la section
- l’utilisation de l’armature en spire à la place de l’armature rectangulaire.
Il s’est avéré par ailleurs, que pour les mêmes taux d’armature, les deux nuances de béton
(BRO,BHR) exhibent, qualitativement les mêmes allures. Cependant les éléments en BHR sont
moins sensibles au confinement que ceux en BRO à cause de la moindre dilatation
volumétrique.
Cette étude a montré que la longueur de confinement est influencée par :
- le niveau de ductilité de courbure,
- l’intensité de l’effort normal,
- le degré ou indice de confinement du béton.
Cependant la résistance flexionnelle croit proportionnellement avec l’intensité de l’effort normal
; la capacité de déformation ( ) est par contre défavorablement affectée. Le rapport
volumétrique de l’armature transversale sh influe positivement les capacités de résistance et de
déformation, cependant son effet sur cette dernière est beaucoup plus prononcé. Le taux
d’armature longitudinale l améliore nettement la capacité de résistance, tout en réduisant
faiblement la capacité de déformation
Le RPA doit introduire dans ses prescriptions actuelles la notion de longueur plastique et
spécifier l’étendue de la longueur de confinement pour différentes classes de ductilité.
145
Références
1- NZS 4203 General Structural Design and Design Loading for Buildings, Wellington,
Standards Association of New Zealand, 1992.
2- Building Code Requirements for Reinforced Concrete, ACI 318-89.
3- Eurocode 8 ( EC8 1993).
4- Règlement Parasismique Algérien, RPA 99.
5- R.Park, T.Paulay, ‘Reinforced Concrete Structures’, J.Wiley, New-York, 1975.
6- M.Fintel, ‘Handbook of Concrete Engineering’, Second edition, 1985 Van Nostrand.
7- K.Sakai, S.A.Sheikh,‘What do we know about Confinement in RC Columns, A Critical
Review of Previous Work and Code Provisions’, ACI Structural Journal, April 1989.
8- S.A.Sheikh, ‘A Comparative Study of Confinement Models’ ACI Journal, July-
August, 1982.
9- D.C.Kent, R.Park, ‘Flexural Members with Confined Concrete’, Journal of the
Structural Division, July, 1971.
10- R.Park, M.J.N.Priestley, W.D.Gill, ‘Ductility of Square Confined Concrete Columns’
Journal of Structural Engineering, Vol.108, N°4, April, 1982.
11- S.A.Sheikh, S.M.Uzumeri, ‘Analytical Model for Concrete Confinement in Tied
Columns’ Journalof Structural Engineering, Vol.108, N°12, December, 1982.
12- J.B.Mander, M.J.N.Priestley R.Park, ‘Observed Stress-Strain Behaviour of Confined
Concrete’ Journal of Structural Engineering, Vol.114, N°8, August,1988.
13- W.W.L.Chan, ‘The Ultimate Strength of Plastic Hinges and Deformation in Reinforced
Concrete Frameworks’ Magazine of Concrete Research, Nov. 1995.
14- B.D.Scott, R.Park, M.J.Priestley ‘Stress-Strain Behavior of Concrete Confined of
Overlapping Hoops at Low and High Strain Rates’ACI Journal January-February 1982.
15- U.Ersoy, A.T.Tankut, S.M.Uzumeri, ‘The Influence of Strain History and Strain
Gradient on Confined Concrete’, Canadian Journal of Civil Engineering, Vol.14, 1987.
16- S.R.Razvi, M.Saatcioglu ’Strength and Deformability of Confined High-Strength
Concrete Columns’, ACI Structural Journal, Nov-Dec, 1994.
17- M.Saatcioglu, S.R.Razvi ’Strength and Ductility Enhancement in High-Strength
Concrete’ Journal of Structural Engineering, Vol 118, N° 6, June, 1992.
18- S.A.Sheikh, D.V.Shah, S.S.Khoury, ‘Confinement of High Strength Concrete
Columns’ ACI Structural Journal, January-February 1994.
19- D.Cusson, P.Paultre, ‘High Strength Concrete Columns Confined by Rectangular Ties’
Journal of Structural Engineering, Vol.120, N°3, March, 1994
146
20- D.Cusson, P.Paultre, ‘ Stress-Strain Model for Confined High Strength Concrete’,
Journal of Structural Engineering, Vol.121, N°3, March, 1995.
21- M.Saatcioglu, A.H.Salamat, S.R.Razvi ’Confined Columns under Eccentric Loading’
Journal of Structural Engineering, Vol 121, N° 11, Nov., 1995.
22- B.Bousalem,‘Contribution à l’Etude de l’Influence de la Résistance et la Ductilité sur
la Performance et le Comportement des Poteaux Parasismiques en Béton’
Thése de Doctorat D’Etat, Septembre 2005, Université Mentouri, Constantine.
23- CBA 93, Code du Béton Algérien, CGS, Alger 1993.
24- A.Fafitis, S.P.Shah, ‘Predictions of Ultimate Behavior of Confined Concrete Columns
Subjected to Large Deformations’, ACI Journal, Vol.82, N°4, 1985.
25- I.K.Fang et al ‘Strength and Ductility of High Strength Tied Columns’ Proc. National.
Sci. Counc. ROGA, Vol.18, N°1, 1994.
26- R.Pendyala et al., ‘Full Range Behavior of High Strength of Concrete Flexural
Members: Comparison of Ductility Parameters of High and Normal Strength Concrete
Members’ACI Journal, January-February 1996.
27- J.Teerawong, P.Lukkunaprasit, T.Senjuntichai, ’Strength Enhancement in Confined
Concrete with Consideration of Flexural Flexibilities of Ties’, Structural Engineering
and Mechanics, Vol.18, N°2, 151-166, 2004.
28- H.Scholz ‘Ductility and Plastic Design of RC Sway Frames’, Magazine of Concrete
Research, June 1993.
29- R.Park, ‘Capacity Design of Ductile of RC Building Structures for Earthquake
Resistance’,The Structural Engineer, Aug., 1992.
30- S.Watson, F.A.Zahn, R.Park, ’Confining Reinforcement for Concrete Columns.’,
Journal of Structural Engineering, vol.120, N°6, paper N° 3687, 1798-1824 June 1994.
31- M.S. Al Haddad, ’Curvature Ductility of Reinforced Concrete Beams under Low and
High Strain Rates’, ACI Structural Journal, September-October, 1995.
32- M.J.N.Priestley, R.Park, ‘Strength and Ductility of Concrete Bridge Columns Under
Seismic Loading’, ACI Structural Journal, January-February 1987.
33- S.A.Sheikh, C.C.Yeh, ‘Flexural Behavior of Concrete Columns’, ACI Journal, May-
June,1986.
34- Watson et al, ‘Simulated Seismic Load Tests in Reinforced Concrete Columns’
Journal of Structural Engineering. Vol.120 N°6,paper N° 3688,1825-1849, June 1994.
147
6.1-Introduction:
L’examen du RPA99 [1] permet de constater que la ductilité locale des éléments linéaires
(poteaux et poutres), n’a pas bénéficié de recommandations appropriées pouvant leur garantir
fidèlement le comportement escompté, du moment que la boucle de contrôle sur la
déformation au niveau des zones dissipatives d'énergie est carrément inexistante. Cette
procédure a été simplifiée par des limitessur les taux d’armatures longitudinales et
transversales ainsi que leur espacement au sein des zones dissipatives d'énergie, conduisant le
plus souvent à conférer un comportement moyennement ductile. Faute d'outils le concepteur
est dans l'impossibilité d'apprécier le niveau de ductilité local ou de pouvoir le contrôler afin
d'établir la corrélation nécessaire entre comportement global, local de la structure. Cette
corrélation est l'alternative de cohérence garantissant un comportement structurel homogène.
Le travail entrepris dans ce chapitre a porté principalement sur la proposition d’outils
permettant le contrôle sur la déformation locale tout en s’accordant avec l’idée de capacité de
déformation d’ensemble, afin de hisser la procédure de dimensionnement actuelle vers une
conception à 2 niveaux de performance. En considérant les éléments verticaux, le niveau
d’endommagement structurel a été introduit élargissant ainsi cette alternative à englober un
partiellement (car c’est uniquement l’ELU qui est considéré) un troisième niveau de
performance.
6.2-POTEAUX:
La capacité de résistance et de déformation des poteaux en béton armé est un facteur
déterminant dans la performance parasismique des portiques autostables. Prédire le niveau
d'endommagement de ces éléments structuraux constitue un atout majeur dans le processus
d'évaluation de la vulnérabilité sismique des portiques, afin d'arrêter de possibles solutions.
Les déformations engendrées par le déplacement relatif de niveau ou rotations plastiques
concordantes au niveau des extrémités des poteaux sont largement utilisées par les guides ou
procédures d'évaluation de la vulnérabilité sismique des bâtiments. Comme, le rapport
volumétrique de l'armature transversale est reconnu comme étant le facteur régissant la
capacité de déformation de ces éléments, une évaluation de cette dernière a été conduite à
travers un cas d’étude et ce, pour différentes prescriptions réglementaires. Afin de palier au
vide réglementaire relatif à l'estimation de la vulnérabilité sismique des portiques autostables
en béton armé une formulation de ce rapport est proposée, fonction d'un niveau
d'endommagement modéré garantissant aussi bien la sécurité des vies humaines que l'intégrité
148
structurelle avec une éventuelle réparation non onéreuse. Les expressions proposées relient le
rapport volumétrique de l'armature transversale ( sh), l’effort normal réduit ( 0NN ) et la
flexibilité des poteaux ( iL ) selon la classe de ductilité et le niveau d’endommagement
souhaité. Cette alternative permet de conférer aux éléments verticaux un même niveau de
ductilité à travers un taux d’armature transversale ajustable; fonction de leur élancementet
l’effort normal sollicitant ainsi qu’un déplacement de niveau constant conduisant à une
meilleure cohérence du comportement global. Ainsi on pourra alors parler de capacité de
déformation de niveau à l’instar d’un déplacement de niveau. Les résultats obtenus ont
également permis de délimiter le coffrage des poteaux fonction du niveau d’endommagement
recherché et ont montré que le déplacement relatif de niveau à observer tel que recommandé
par le code RPA99 doit être réduit afin d’éviter une éventuelle perte de stabilité structurelle
résultante d’un endommagement excessif.
6.2.1- Armatures transversales: Confrontation réglementaire:
La rotulation dans les zones dissipatives d’énergie est atteinte suite à la diffusion de la
plastification à travers une longueur potentielle dite longueur de rotule plastique. L’état de
déformation dépend intimement des lois de comportement des matériaux constitutifs; béton non
confiné ; béton confiné et aciers. Le béton confiné à été dégagé comme étant le paramètre
déterminant. La présence d’une armature transversale supplémentaire, bien disposée
latéralement, contribue à confiner le béton du noyau de la section; augmenter sa capacité de
résistance et de déformation, lui conférant ainsi un comportement ductile. Cette armature a pour
rôle d'agir comme armature de cisaillement ; d'empêcher le flambement des armatures
longitudinales comprimées ; et de réduire l’effet disruptif du noyau de béton sous une action
cyclique de grandes amplitudes. Les différents modèles du béton confiné universellement établis
s'articulent sur deux hypothèses fondamentales, à savoir: un état de compression triaxial généré
par la pression passive latérale de confinement, et une déformation longitudinale ultime de
compression du béton confiné dictée par rupturede l’armature transversale.

149
Bien que le code RPA fixe un taux d’armature transversale sh à respecter, malheureusement
aucune allusion n’est faite au confinement; facteur régissant l’aptitude ductile des sections.
g 5 sh min =0.3% 1shsh b.s/A (6.1)
3g5 interpolation linéaire
g 3 sh min =0.8%
bld10,mm150Mins en zone 1 et 2 et cm10s en zone 3
L’élancement géométrique g, introduit comme paramètre conditionnant la sélection d’un
taux approprié; ne peut à lui seul être le facteur déterminant quand au choix du taux
d’armature transversale garantissant le niveau de sécurité recherché. Les limites prescrites
relatives aux différentes zones, sont jugées inappropriées, car en zone 1 c’est la capacité de
résistance qui prédomine, alors que pour les zones 2 et 3 c’est l’aptitude plastique des
sections qui est primordiale. Il serait plus logique d’établir une limite commune pour les
zones 2 et 3. Il est clair que le code RPA recommande un taux d’armatures indifféremment de
la classe de ductilité, et il s’avère de part sa formulation que ce dernier a été élaboré dans un
esprit de résistance.
Le code NZS [2] prend en compte l’effet de l’intensité de l’effortnormal et recommande la
valeur de Ash, comme étant le maximum des deux valeurs suivantes:
g'co
e
yh
'co
nh
gcsh Af
P25.15.0
ff
1A
Ash3.0A ,et Ash
g'co
e
yh
'coc
AfP
25.15.0ff
sh12.0 (6.2)
On remarque par ailleurs, que les prescriptions de l’EC-8 [3] englobent différents paramètres
géométriques et mécaniques des matériaux utilisés ayant incidence sur le comportement local,
qui avec l’espacement approprié fournira le niveau de ductilité recherché.
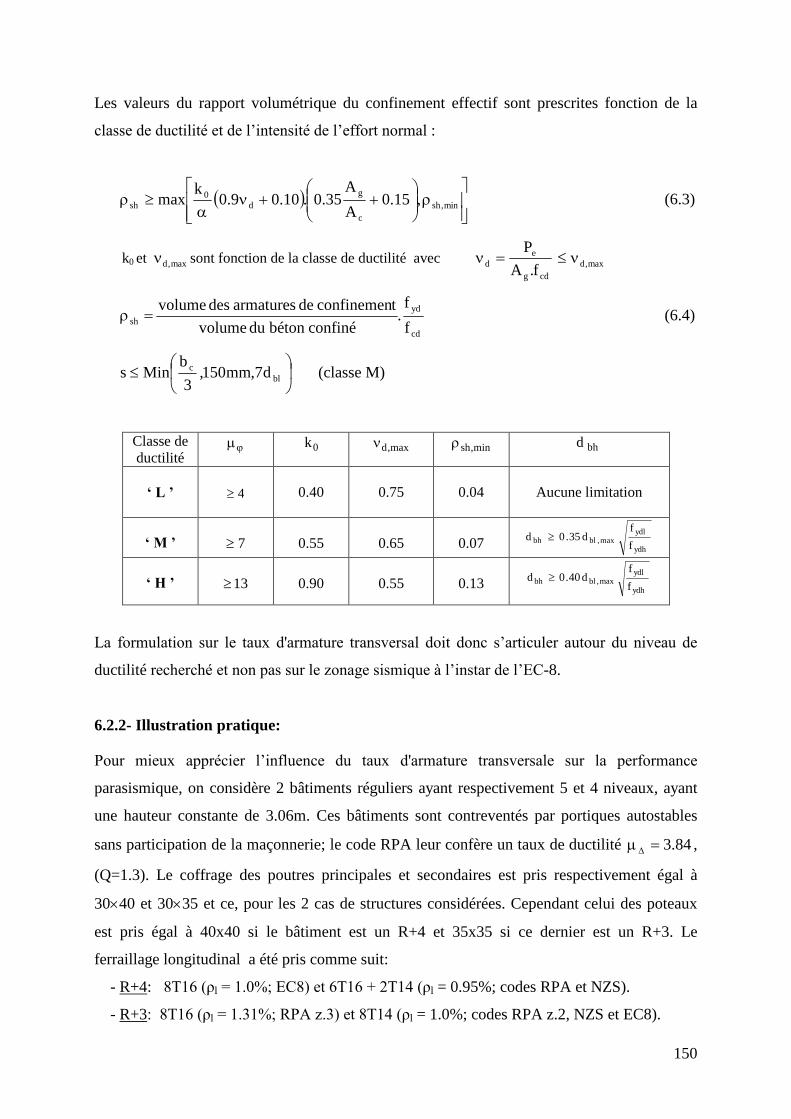
150
Les valeurs du rapport volumétrique du confinement effectif sont prescrites fonction de la
classe de ductilité et de l’intensité de l’effort normal:
min,sh
c
gd
0sh ,15.0
A
A35.0.10.09.0
kmax (6.3)
k0 et max,d sont fonction de la classe de ductilité aveccdg
ed f.A
P max,d
cd
ydsh f
f.
confinébétonduvolumetconfinemendearmaturesdesvolume
(6.4)
bl
c d7,mm150,3
bMins (classe M)
Classe deductilité
0k max,d min,sh bhd
‘ L ’ 4 0.40 0.75 0.04 Aucune limitation
‘ M ’ 7 0.55 0.65 0.07 ydh
ydlmax,blbh f
fd35.0d
‘ H ’ 13 0.90 0.55 0.13 ydh
ydlmax,blbh f
fd40.0d
La formulation sur le taux d'armature transversal doit donc s’articuler autour du niveau de
ductilitérecherché et non pas sur le zonage sismique à l’instar de l’EC-8.
6.2.2- Illustration pratique:
Pour mieux apprécier l’influence du taux d'armature transversale sur la performance
parasismique, on considère 2 bâtiments réguliers ayant respectivement 5 et 4 niveaux, ayant
une hauteur constante de 3.06m. Ces bâtiments sont contreventés par portiques autostables
sans participation de la maçonnerie; le code RPA leur confère un taux de ductilité 84.3 ,
(Q=1.3). Le coffrage des poutres principales et secondaires est pris respectivement égal à
3040 et 3035 et ce, pour les 2 cas de structures considérées. Cependant celui des poteaux
est pris égal à 40x40 si le bâtiment est un R+4 et 35x35 si ce dernier est un R+3. Le
ferraillage longitudinal a été pris comme suit:
- R+4: 8T16 (ρl = 1.0%; EC8) et 6T16 + 2T14 (ρl = 0.95%; codes RPA et NZS).
- R+3: 8T16 (ρl = 1.31%; RPA z.3) et 8T14 (ρl = 1.0%; codes RPA z.2, NZS et EC8).
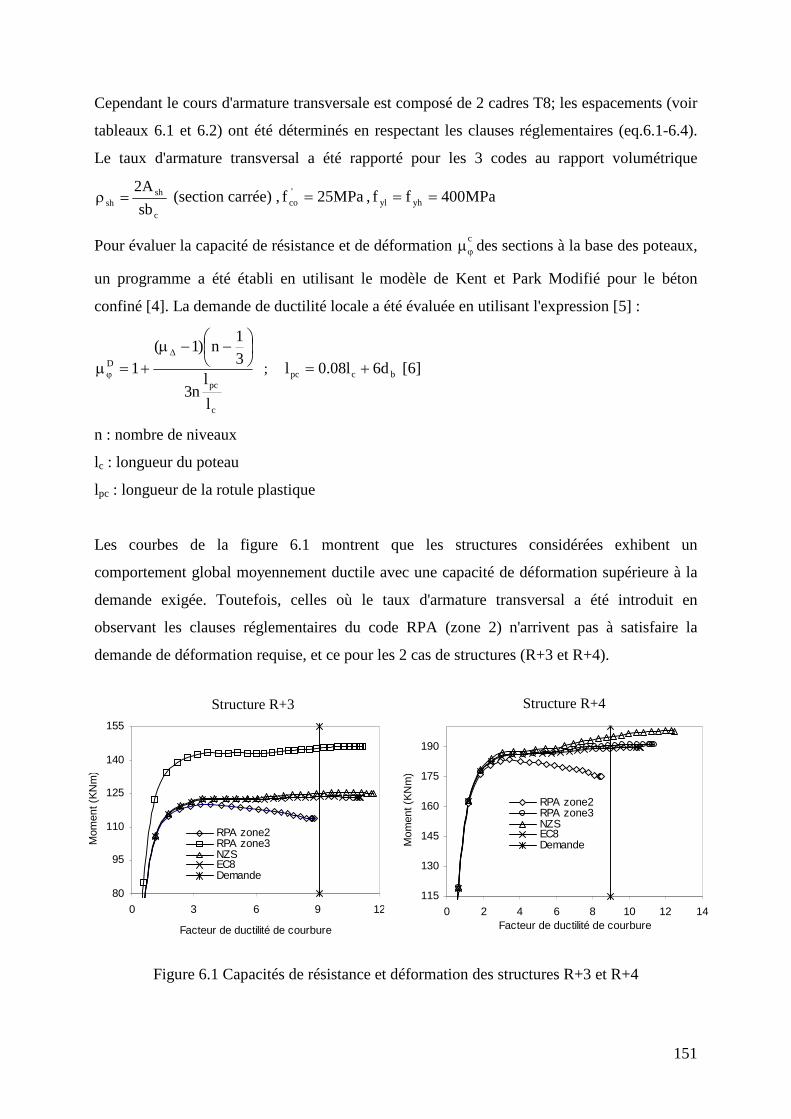
151
Cependant le cours d'armature transversale est composé de 2 cadres T8; les espacements (voir
tableaux 6.1 et 6.2) ont été déterminés en respectant les clauses réglementaires (eq.6.1-6.4).
Le taux d'armature transversal a été rapporté pour les 3 codes au rapport volumétrique
c
shsh sb
A2 (section carrée) , MPa25f '
co , MPa400ff yhyl
Pour évaluer la capacité de résistance et de déformation cdes sections à la base des poteaux,
un programme a été établi en utilisant le modèle de Kent et Park Modifié pour le béton
confiné [4]. La demande de ductilité locale a été évaluée en utilisant l'expression [5] :
c
pc
D
l
ln3
31
n)1(1
; bcpc d6l08.0l [6]
n : nombre de niveaux
lc : longueur du poteau
lpc : longueur de la rotule plastique
Les courbes de la figure 6.1 montrent que les structures considérées exhibent un
comportement global moyennement ductile avec une capacité de déformation supérieure à la
demande exigée. Toutefois, celles où le taux d'armature transversal a été introduit en
observant les clauses réglementaires du code RPA (zone 2) n'arrivent pas à satisfaire la
demande de déformation requise, et ce pour les 2 cas de structures (R+3 et R+4).
Figure 6.1 Capacités de résistance et déformation des structures R+3 et R+4
80
95
110
125
140
155
0 3 6 9 12
Facteur de ductilité de courbure
Mom
ent(
KN
m)
RPA zone2RPA zone3NZSEC8Demande
115
130
145
160
175
190
0 2 4 6 8 10 12 14Facteur de ductilité de courbure
Mom
ent(
KN
m)
RPA zone2RPA zone3NZSEC8Demande
Structure R+3 Structure R+4
152
Les tableaux 6.1 et 6.2 montrent qu'en respectant le code RPA, la réserve de résistance est
assez conséquente (100-140% en zone2 et 60% environ en zone3). Cependant la capacité de
déformation des structures conçues en zone2 est restreinte, et ne répond pas à la demande
exigée. Les poteaux des files centrales et de rive (s = 14cm), sont dans l'incapacité de dissiper
l'énergie induite par la réponse sismique. On note par ailleurs, que la file centrale du portique
R+4 a basculé dans la classe L(μφ < 7). Le bâtiment dans ce cas périra donc par éclatement de
l'armature transversale. La densification de cette armature (s = 10cm) a permis à la structure
(R+4) d'exhiber un comportement global homogène moyennement ductile (M), néanmoins la
file centrale est restée dans l'incapacité de satisfaire la demande de déformation requise.
Si les codes NZS et l'EC8 sont considérés on peut constater que les réserves restent
satisfaisantes tant pour la résistance que pour la déformation. Toutefois les poteaux d'angle
renferment une capacité de déformation beaucoup plus accrue et semblent avoir un
comportement hautement ductile (H). Cette réserve serait amoindrie si les modes supérieures
de vibration induisant les effets de torsion ont été pris en considération dans les prescriptions
réglementaires, réduisant ainsi le taux de déformabilité de l'armature de confinement et par
l'occasion la ductilité locale de la section. Il a été en outre constaté [7] que l'armature de
confinement recommandée par l'EC8 correspond plutôt à un coefficient de ductilité moyen,
c'est à dire qu'en moyenne 50% des poteaux fournissent la ductilité demandée. Ceci pourra
être satisfaisant pour des structures hautement redondantes, du moment qu'un nombre
important de poteaux participera à dissiper la totalité de l'énergie requise quelque soit la
quantité dissipée par chacun d'eux. Néanmoins cette souplesse ne sera point accordée à des
structures faiblement redondantes.
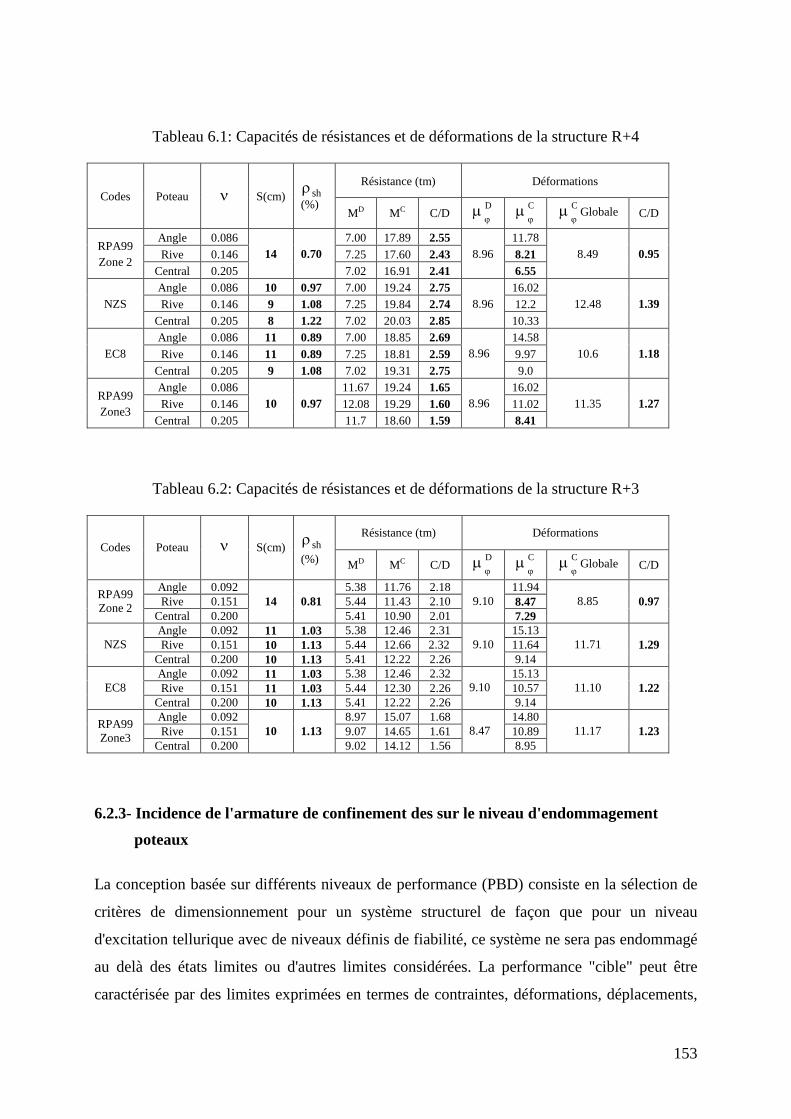
153
Tableau 6.1: Capacités de résistances et de déformations de la structure R+4
Tableau 6.2: Capacités de résistances et de déformations de la structure R+3
6.2.3- Incidence de l'armature de confinement des sur le niveau d'endommagement
poteaux
La conception basée sur différents niveaux de performance (PBD) consiste en la sélection de
critères de dimensionnement pour un système structurel de façon que pour un niveau
d'excitation tellurique avec de niveaux définis de fiabilité, ce système ne sera pas endommagé
au delà des états limites ou d'autres limites considérées. La performance "cible" peut être
caractérisée par des limites exprimées en termes de contraintes, déformations, déplacements,
Résistance (tm) DéformationsCodes Poteau S(cm) sh
(%)MD MC C/D
D
C
C
Globale C/D
Angle 0.086 7.00 17.89 2.55 11.78Rive 0.146 7.25 17.60 2.43 8.21
RPA99Zone 2
Central 0.20514 0.70
7.02 16.91 2.418.96
6.558.49 0.95
Angle 0.086 10 0.97 7.00 19.24 2.75 16.02Rive 0.146 9 1.08 7.25 19.84 2.74 12.2NZS
Central 0.205 8 1.22 7.02 20.03 2.858.96
10.3312.48 1.39
Angle 0.086 11 0.89 7.00 18.85 2.69 14.58Rive 0.146 11 0.89 7.25 18.81 2.59 9.97EC8
Central 0.205 9 1.08 7.02 19.31 2.758.96
9.010.6 1.18
Angle 0.086 11.67 19.24 1.65 16.02Rive 0.146 12.08 19.29 1.60 11.02
RPA99Zone3
Central 0.20510 0.97
11.7 18.60 1.598.96
8.4111.35 1.27
Résistance (tm) DéformationsCodes Poteau S(cm) sh
(%) MD MC C/DD
C
C
Globale C/D
Angle 0.092 5.38 11.76 2.18 11.94Rive 0.151 5.44 11.43 2.10 8.47
RPA99Zone 2
Central 0.20014 0.81
5.41 10.90 2.019.10
7.298.85 0.97
Angle 0.092 11 1.03 5.38 12.46 2.31 15.13Rive 0.151 10 1.13 5.44 12.66 2.32 11.64NZS
Central 0.200 10 1.13 5.41 12.22 2.269.10
9.1411.71 1.29
Angle 0.092 11 1.03 5.38 12.46 2.32 15.13Rive 0.151 11 1.03 5.44 12.30 2.26 10.57EC8
Central 0.200 10 1.13 5.41 12.22 2.269.10
9.1411.10 1.22
Angle 0.092 8.97 15.07 1.68 14.80Rive 0.151 9.07 14.65 1.61 10.89
RPA99Zone3
Central 0.20010 1.13
9.02 14.12 1.568.47
8.9511.17 1.23
154
accélérations etc…Pour ce, les objectifs de performance sont exprimés en terme d'un état
spécifique d'endommagement ou de probabilité de "ruine" contre une probabilité prescrite
d'un niveau "demande". Bien que les documents réglementaires basés sur la philosophie en
performance avancent les mêmes concepts, au niveau du détail ils spécifient différents
niveaux de performance [8]. Il est reconnu que les limites exprimées en déplacement relatif
spécifiques à différents niveaux d'endommagement peuvent varier considérablement en
fonction du système structurel et du matériau de construction.
Le constat établi, après les séismes survenus récemment a montré que les structures érigées
conformément aux codes parasismiques modernes se sont comportées comme prévu en
enregistrant une perte de vies minimale. Cependant, la perte économique conséquente [9] de
l'endommagement permanent est faramineuse (100 milliards de dollars en 1995 pour le Japon
seul). Pour ce, le contrôle de l'endommagement doit être plus explicite dans la conception
parasismique spécialement en sites urbains afin d'éviter le préjudice résultant. L'état
d'endommagement d'un poteau est habituellement déterminé en calculant l'index
d'endommagement qui est généralement relié au niveau de ductilité de déplacement, l'énergie
dissipée, la dégradation de rigidité et la déformation des poteaux. Les déformations
engendrées par le déplacement relatif de niveau ou rotations plastiques concordantes au
niveau des extrémités des poteaux sont largement utilisées par les guides ou procédures
d'évaluation de la vulnérabilité sismique des bâtiments.
6.2.3.1- Niveaux de performance:
Le principe philosophique de base établi dans la conception parasismique est qu'il est
économiquement non justifiable que dans une zone sismique toutes les structures doivent être
conçues pour survivre au tremblement de terre le plus violent possible sans jamais enregistrer
d'endommagement. Il est donc plus raisonnable de tolérer pour un séisme sévère un certain
niveau d'endommagement tant que la ruine est évitée. C’est l’objectif recherché par les
recommandations parasismiques. Cependant il n'existe pas de commun accord sur la
définition du niveau d'endommagement acceptable suite à un séisme spécifique mais
seulement des critères d'acceptance pour caractériser ces performances:
a- Sécurité des vies (Life safety): exigence fondamentale ;
b- Réparation de l'endommagement (Reparable damage): une distinction est faite entre
endommagement structurel réparable et endommagement structurel non réparable ;
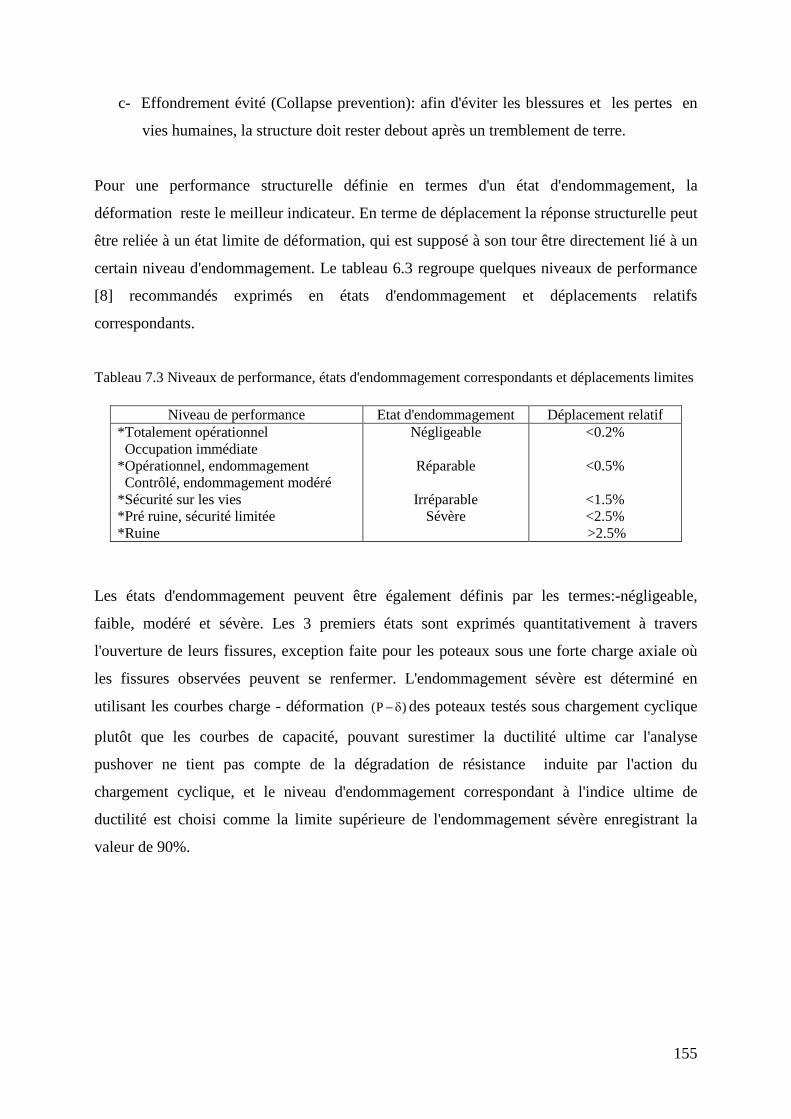
155
c- Effondrement évité (Collapse prevention): afin d'éviter les blessures et les pertes en
vies humaines, la structure doit rester debout après un tremblement de terre.
Pour une performance structurelle définie en termes d'un état d'endommagement, la
déformation reste le meilleur indicateur. En terme de déplacement la réponse structurelle peut
être reliée à un état limite de déformation, qui est supposé à son tour être directement lié à un
certain niveau d'endommagement. Le tableau 6.3 regroupe quelques niveaux de performance
[8] recommandés exprimés en états d'endommagement et déplacements relatifs
correspondants.
Tableau 7.3 Niveaux de performance, états d'endommagement correspondants et déplacements limites
Niveau de performance Etat d'endommagement Déplacement relatif*Totalement opérationnel
Occupation immédiate*Opérationnel, endommagement
Contrôlé, endommagement modéré*Sécurité sur les vies*Pré ruine, sécurité limitée*Ruine
Négligeable
Réparable
IrréparableSévère
<0.2%
<0.5%
<1.5%<2.5%>2.5%
Les états d'endommagement peuvent être également définis par les termes:-négligeable,
faible, modéré et sévère. Les 3 premiers états sont exprimés quantitativement à travers
l'ouverture de leurs fissures, exception faite pour les poteaux sous une forte charge axiale où
les fissures observées peuvent se renfermer. L'endommagement sévère est déterminé en
utilisant les courbes charge - déformation )P( des poteaux testés sous chargement cyclique
plutôt que les courbes de capacité, pouvant surestimer la ductilité ultime car l'analyse
pushover ne tient pas compte de la dégradation de résistance induite par l'action du
chargement cyclique, et le niveau d'endommagement correspondant à l'indice ultime de
ductilité est choisi comme la limite supérieure de l'endommagement sévère enregistrant la
valeur de 90%.

156
6.2.3.2- Courbes d'endommagement:
En se basant sur des résultats de recherche numériques Yakut et al [10] ont établis des courbes
d'endommagement exprimées en termes de déplacement relatif d’étage en considérant que:
- le confinement est introduit à travers le modèle de Kent et Park modifié [4].
- le mode de ruine s’effectue par flexion
- la ruine par flexion précède la ruine par cisaillement
- le glissement des barres ou le manque d'adhérence sont écartés.
L'étude paramétrique a montré que les facteurs affectant les déformations limites des poteaux
en béton armé sont respectivement:
- yf : limite élastique de l’acier longitudinal
- )iL( : élancement mécanique du poteau
- )NN( 0 : effort normal réduit
- sh : rapport volumétrique de l’armature transversale
Les 2 premiers paramètres à savoir yf et )iL( affectent considérablement le déplacement
élastique y[11], alors que les 2 derniers ont incidence directe aussi bien sur le niveau de
ductilité , que sur la capacité de déformation des poteaux. Ainsi, cette influence peut être
exprimée à travers le rapport )NN( 0sh représentant le niveau de ductilité des poteaux.
Trois classes de ductilité fonction de ce paramètre sont catégorisées :
- %5)NN( 0sh ductilité faible (L)
- %10)NN(%5 0sh ductilité modérée (M)
- %10)NN( 0sh ductilité élevée (H)
Des courbes d’endommagement pour les 3 classes de ductilité ont été établies. Il a été
constaté que la forme exponentielle est la plus appropriée pour exprimer l'endommagement en
fonction du déplacement relatif )(tout en tenant compte de l'influence de la résistance de
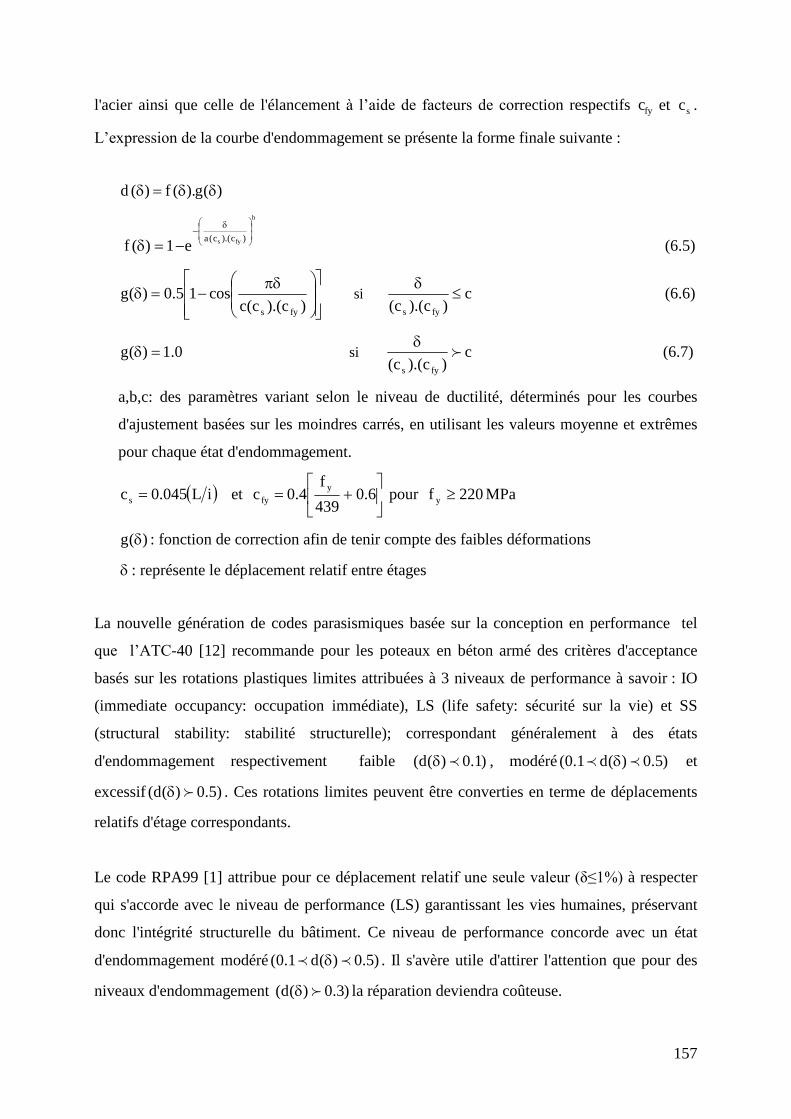
157
l'acier ainsi que celle de l'élancement à l’aide de facteurs de correction respectifs fyc et sc .
L’expression de la courbe d'endommagement se présente la forme finale suivante :
)(g).(f)(d b
fys )c).(c(ae1)(f
(6.5)
)c).(c(ccos15.0)(g
fys
si c)c).(c( fys
(6.6)
0.1)(g si c)c).(c( fys
(6.7)
a,b,c: des paramètres variant selon le niveau de ductilité, déterminés pour les courbes
d'ajustement basées sur les moindres carrés, en utilisant les valeurs moyenne et extrêmes
pour chaque état d'endommagement.
iL045.0c s et
6.0
439
f4.0c y
fy pour MPa220f y
)(g : fonction de correction afin de tenir compte des faibles déformations
: représente le déplacement relatif entre étages
La nouvelle génération de codes parasismiques basée sur la conception en performance tel
que l’ATC-40 [12] recommande pour les poteaux en béton armé des critères d'acceptance
basés sur les rotations plastiques limites attribuées à 3 niveaux de performance à savoir : IO
(immediate occupancy: occupation immédiate), LS (life safety: sécurité sur la vie) et SS
(structural stability: stabilité structurelle); correspondant généralement à des états
d'endommagement respectivement faible )1.0)(d( , modéré )5.0)(d1.0( et
excessif )5.0)(d( . Ces rotations limites peuvent être converties en terme de déplacements
relatifs d'étage correspondants.
Le code RPA99 [1] attribue pour ce déplacement relatif une seule valeur (δ≤1%) à respecter
qui s'accorde avec le niveau de performance (LS) garantissant les vies humaines, préservant
donc l'intégrité structurelle du bâtiment. Ce niveau de performance concorde avec un état
d'endommagement modéré )5.0)(d1.0( . Il s'avère utile d'attirer l'attention que pour des
niveaux d'endommagement )3.0)(d( la réparation deviendra coûteuse.
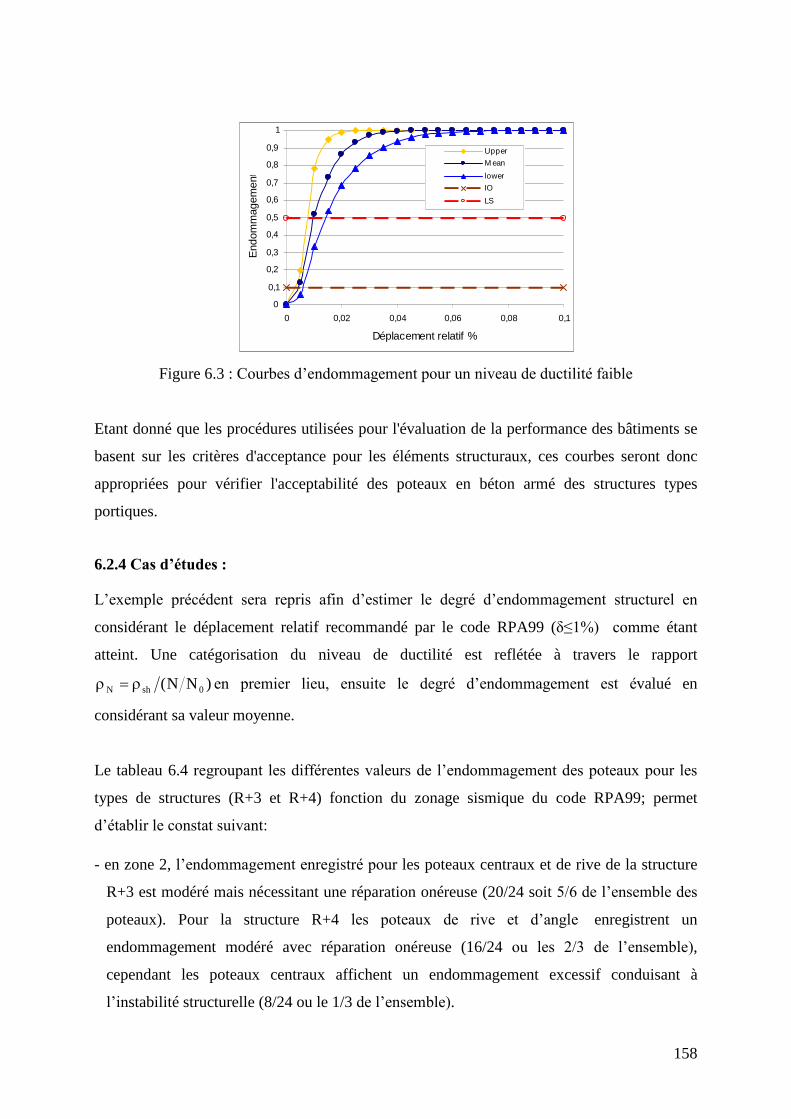
158
Figure 6.3 : Courbes d’endommagement pour un niveau de ductilité faible
Etant donné que les procédures utilisées pour l'évaluation de la performance des bâtiments se
basent sur les critères d'acceptance pour les éléments structuraux, ces courbes seront donc
appropriées pour vérifier l'acceptabilité des poteaux en béton armé des structures types
portiques.
6.2.4 Cas d’études:
L’exemple précédent sera repris afin d’estimer le degré d’endommagement structurel en
considérant le déplacement relatif recommandé par le code RPA99 (δ≤1%) comme étant
atteint. Une catégorisation du niveau de ductilité est reflétée à travers le rapport
)NN( 0shN en premier lieu, ensuite le degré d’endommagement est évalué en
considérant sa valeur moyenne.
Le tableau 6.4 regroupant les différentes valeurs de l’endommagement des poteaux pour les
types de structures (R+3 et R+4) fonction du zonage sismique du code RPA99; permet
d’établir le constat suivant:
- en zone 2, l’endommagement enregistré pour les poteaux centraux et de rive de la structure
R+3 est modéré mais nécessitant une réparation onéreuse (20/24 soit 5/6 de l’ensemble des
poteaux). Pour la structure R+4 les poteaux de rive et d’angle enregistrent un
endommagement modéré avec réparation onéreuse (16/24 ou les 2/3 de l’ensemble),
cependant les poteaux centraux affichent un endommagement excessif conduisant à
l’instabilité structurelle (8/24 ou le 1/3de l’ensemble).
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 0,02 0,04 0,06 0,08 0,1
Déplacement relatif %
End
omm
agem
ent
UpperM ean
lowerIO
LS
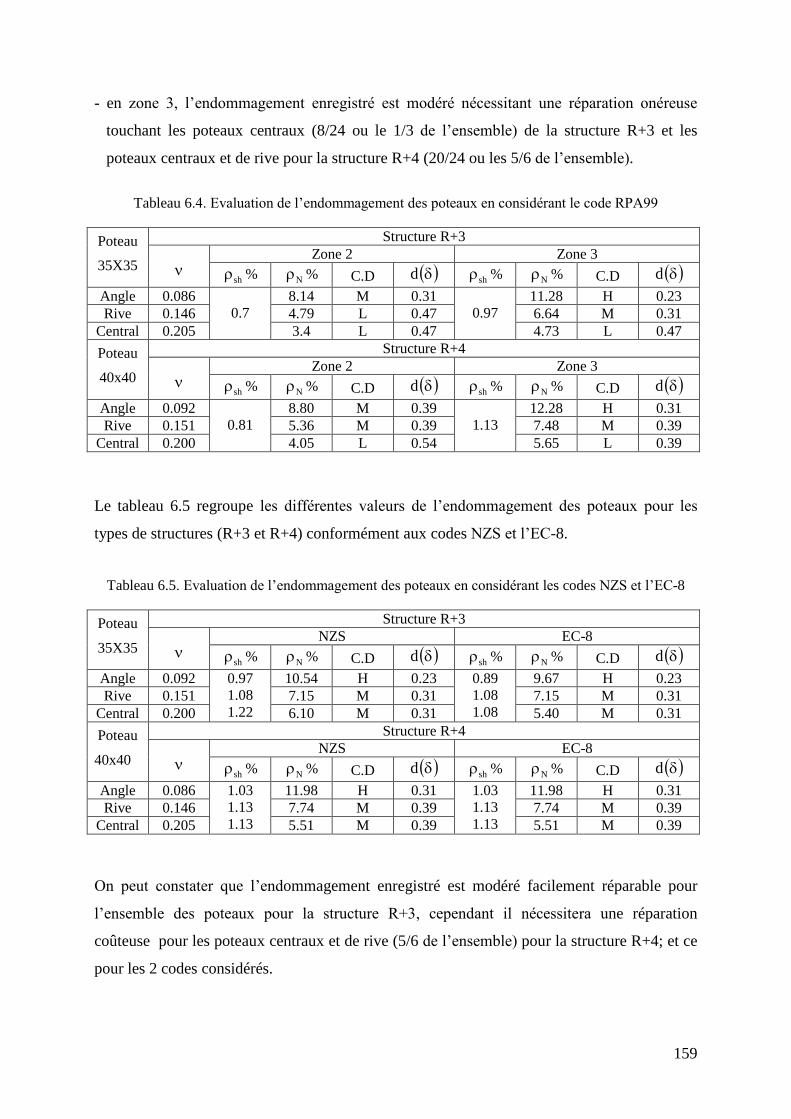
159
- en zone 3, l’endommagement enregistré est modéré nécessitant une réparation onéreuse
touchant les poteaux centraux (8/24 ou le 1/3 de l’ensemble) de la structure R+3 et les
poteaux centraux et de rive pour la structure R+4 (20/24 ou les 5/6de l’ensemble).
Tableau 6.4. Evaluation de l’endommagement des poteaux en considérant le code RPA99
Structure R+3Zone 2 Zone 3
Poteau
35X35 sh % N % C.D d sh % N % C.D d
Angle 0.086 8.14 M 0.31 11.28 H 0.23Rive 0.146 4.79 L 0.47 6.64 M 0.31
Central 0.2050.7
3.4 L 0.470.97
4.73 L 0.47Structure R+4
Zone 2 Zone 3Poteau
40x40 sh % N % C.D d sh % N % C.D d
Angle 0.092 8.80 M 0.39 12.28 H 0.31Rive 0.151 5.36 M 0.39 7.48 M 0.39
Central 0.2000.81
4.05 L 0.541.13
5.65 L 0.39
Le tableau 6.5 regroupe les différentes valeurs de l’endommagement des poteaux pour les
types de structures (R+3 et R+4) conformément aux codes NZS et l’EC-8.
Tableau 6.5. Evaluation de l’endommagement des poteaux en considérant les codes NZS et l’EC-8
Structure R+3NZS EC-8
Poteau
35X35 sh % N % C.D d sh % N % C.D d
Angle 0.092 10.54 H 0.23 9.67 H 0.23Rive 0.151 7.15 M 0.31 7.15 M 0.31
Central 0.200
0.971.081.22 6.10 M 0.31
0.891.081.08 5.40 M 0.31
Structure R+4NZS EC-8
Poteau
40x40 sh % N % C.D d sh % N % C.D d
Angle 0.086 11.98 H 0.31 11.98 H 0.31Rive 0.146 7.74 M 0.39 7.74 M 0.39
Central 0.205
1.031.131.13 5.51 M 0.39
1.031.131.13 5.51 M 0.39
On peut constater que l’endommagement enregistré est modéré facilement réparable pour
l’ensemble des poteaux pour la structure R+3, cependant il nécessitera une réparation
coûteuse pour les poteaux centraux et de rive (5/6de l’ensemble)pour la structure R+4; et ce
pour les 2 codes considérés.
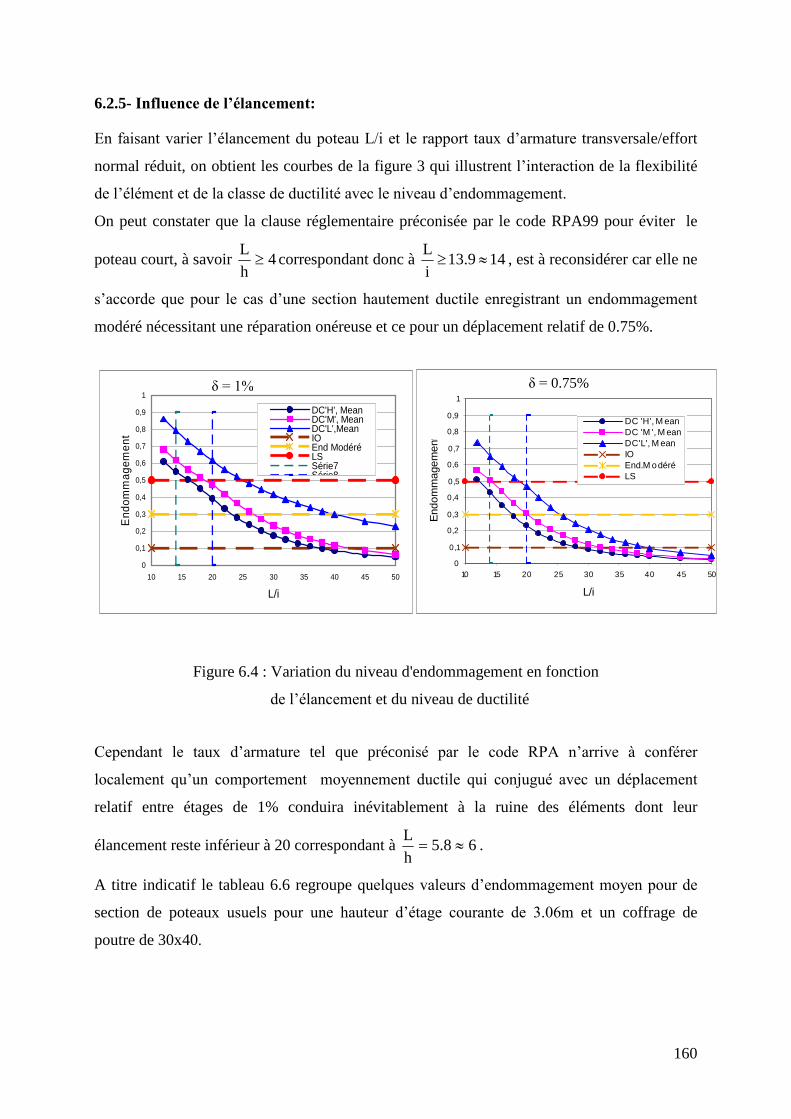
160
6.2.5-Influence de l’élancement:
En faisant varier l’élancement du poteau L/i et le rapport taux d’armature transversale/effort
normal réduit, on obtient les courbes de la figure 3 qui illustrent l’interaction de la flexibilité
de l’élément et de la classe de ductilité avec le niveau d’endommagement.
On peut constater que la clause réglementaire préconisée par le code RPA99 pour éviter le
poteau court, à savoir 4hL correspondant donc à 149.13
iL
, est à reconsidérer car elle ne
s’accorde que pour le cas d’une section hautement ductile enregistrant un endommagement
modéré nécessitant une réparation onéreuse et ce pour un déplacement relatif de 0.75%.
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
10 15 20 25 30 35 40 45 50
L/i
End
omm
agem
ent
DC'H', MeanDC'M', MeanDC'L',MeanIOEnd ModéréLSSérie7Série8
Figure 6.4 : Variation du niveau d'endommagement en fonction
de l’élancementet du niveau de ductilité
Cependant le taux d’armature tel que préconisé par le code RPA n’arrive à conférer
localement qu’un comportement moyennement ductile qui conjugué avec un déplacement
relatif entre étages de 1% conduira inévitablement à la ruine des éléments dont leur
élancement reste inférieur à 20 correspondant à 68.5hL
.
A titre indicatif le tableau 6.6 regroupe quelques valeurs d’endommagement moyen pour de
section de poteaux usuels pour une hauteur d’étage courante de 3.06m et un coffrage de
poutre de 30x40.
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
10 15 20 25 30 35 40 45 50
L/i
End
omm
agem
ent
DC 'H', M eanDC 'M ', M eanDC'L', M eanIOEnd.M odéréLSSérie7
δ = 0.75%δ = 1%
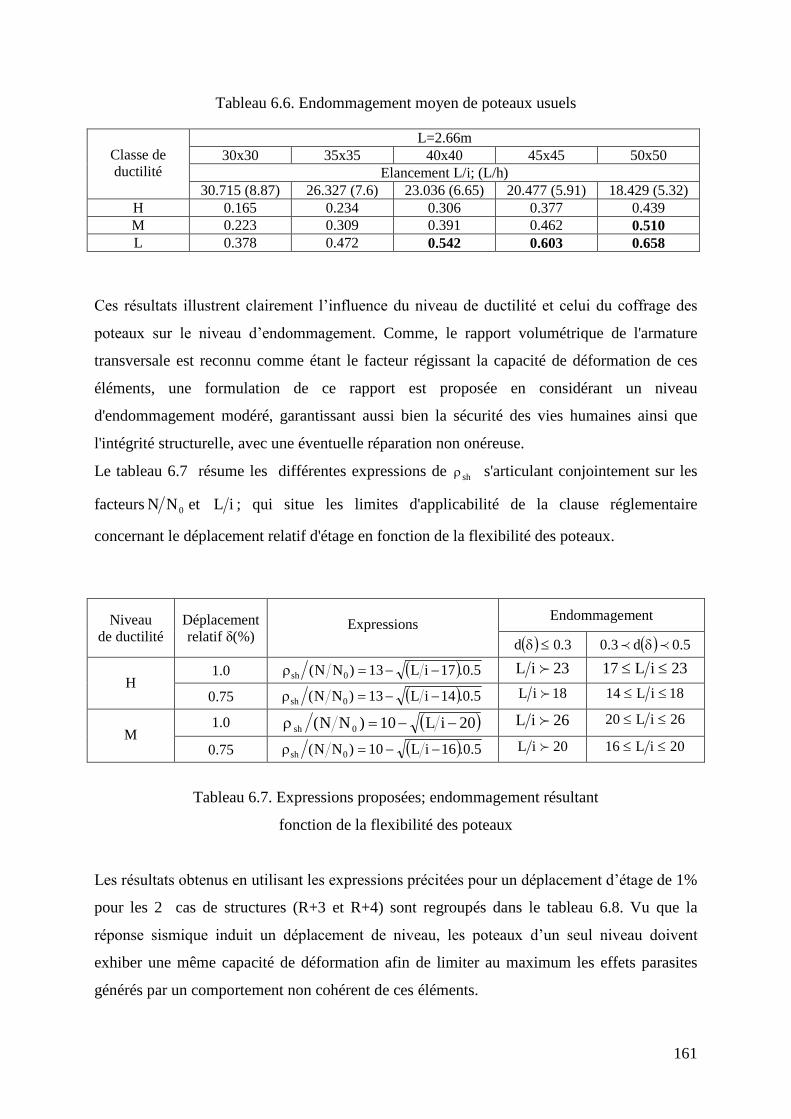
161
Tableau 6.6. Endommagement moyen de poteaux usuels
L=2.66m30x30 35x35 40x40 45x45 50x50
Elancement L/i; (L/h)Classe deductilité
30.715 (8.87) 26.327 (7.6) 23.036 (6.65) 20.477 (5.91) 18.429 (5.32)H 0.165 0.234 0.306 0.377 0.439M 0.223 0.309 0.391 0.462 0.510L 0.378 0.472 0.542 0.603 0.658
Ces résultats illustrent clairement l’influence du niveau de ductilité et celui du coffrage des
poteaux sur le niveau d’endommagement. Comme, le rapport volumétrique de l'armature
transversale est reconnu comme étant le facteur régissant la capacité de déformation de ces
éléments, une formulation de ce rapport est proposée en considérant un niveau
d'endommagement modéré, garantissant aussi bien la sécurité des vies humaines ainsi que
l'intégrité structurelle, avec une éventuelle réparation non onéreuse.
Le tableau 6.7 résume les différentes expressions de sh s'articulant conjointement sur les
facteurs 0NN et iL ; qui situe les limites d'applicabilité de la clause réglementaire
concernant le déplacement relatif d'étage en fonction de la flexibilité des poteaux.
EndommagementNiveaude ductilité
Déplacementrelatifδ(%)
Expressions 3.0d 5.0d3.0
1.0 5.0.17iL13)NN( 0sh 23iL 23iL17 H
0.75 5.0.14iL13)NN( 0sh 18iL 18iL14
1.0 20iL10)NN( 0sh 26iL 26iL20 M
0.75 5.0.16iL10)NN( 0sh 20iL 20iL16
Tableau 6.7. Expressions proposées; endommagement résultant
fonction de la flexibilité des poteaux
Les résultats obtenus en utilisant les expressions précitées pour un déplacement d’étage de 1%
pour les 2 cas de structures (R+3 et R+4) sont regroupés dans le tableau 6.8. Vu que la
réponse sismique induit un déplacement de niveau, les poteaux d’un seul niveau doivent
exhiber une même capacité de déformation afin de limiter au maximum les effets parasites
générés par un comportement non cohérent de ces éléments.
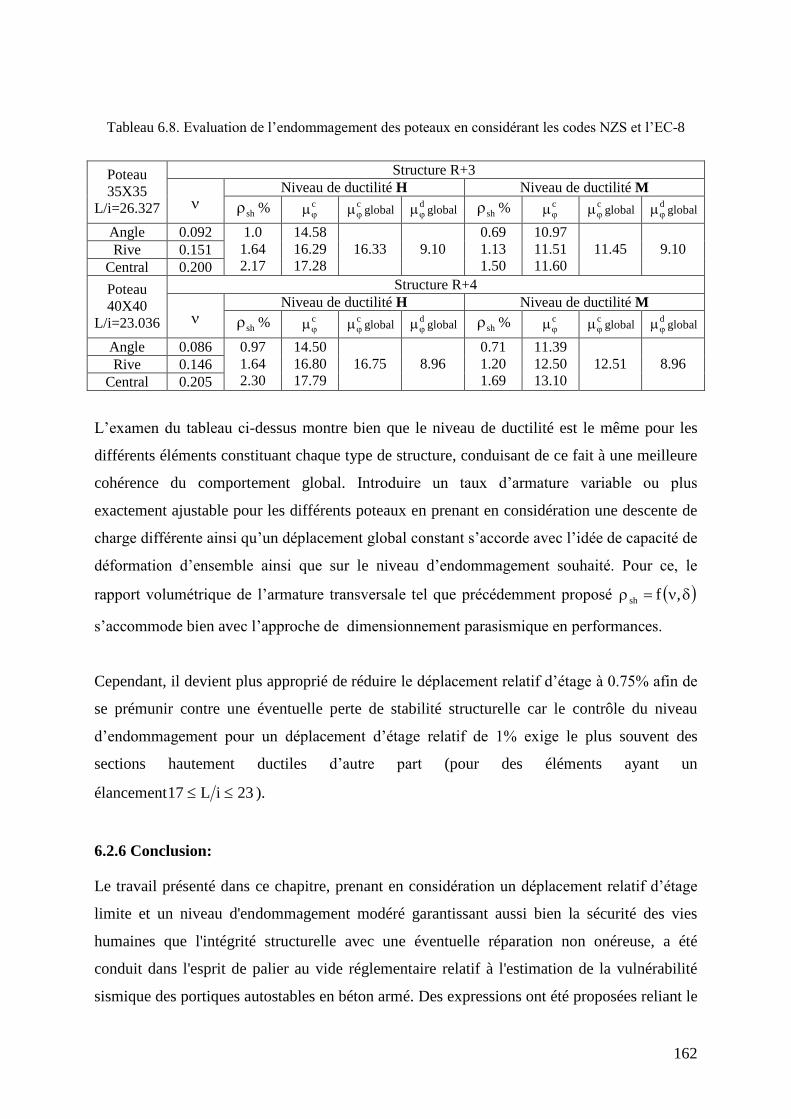
162
Tableau 6.8. Evaluation de l’endommagement des poteaux en considérant les codes NZS et l’EC-8
Structure R+3Niveau de ductilité H Niveau de ductilité M
Poteau35X35
L/i=26.327 sh % c
c global d
global sh % c
c global d
global
Angle 0.092Rive 0.151
Central 0.200
1.01.642.17
14.5816.2917.28
16.33 9.100.691.131.50
10.9711.5111.60
11.45 9.10
Structure R+4Niveau de ductilité H Niveau de ductilité M
Poteau40X40
L/i=23.036 sh % c
c global d
global sh % c
c global d
global
Angle 0.086Rive 0.146
Central 0.205
0.971.642.30
14.5016.8017.79
16.75 8.960.711.201.69
11.3912.5013.10
12.51 8.96
L’examen du tableau ci-dessus montre bien que le niveau de ductilité est le même pour les
différents éléments constituant chaque type de structure, conduisant de ce fait à une meilleure
cohérence du comportement global. Introduire un taux d’armature variable ou plus
exactement ajustable pour les différents poteaux en prenant en considération une descente de
charge différente ainsi qu’un déplacement global constant s’accorde avec l’idée de capacité de
déformation d’ensemble ainsi que sur le niveau d’endommagement souhaité. Pour ce, le
rapport volumétrique de l’armature transversale tel que précédemment proposé ,fsh
s’accommodebien avec l’approche de dimensionnement parasismique en performances.
Cependant, il devient plus approprié de réduirele déplacement relatif d’étage à 0.75% afin de
se prémunir contre une éventuelle perte de stabilité structurelle car le contrôle du niveau
d’endommagement pour un déplacement d’étage relatif de 1% exige le plus souvent des
sections hautement ductiles d’autre part (pour des éléments ayant un
élancement 23iL17 ).
6.2.6 Conclusion:
Le travail présenté dans ce chapitre, prenant en considération un déplacement relatif d’étage
limite et un niveau d'endommagement modéré garantissant aussi bien la sécurité des vies
humaines que l'intégrité structurelle avec une éventuelle réparation non onéreuse, a été
conduit dans l'esprit de palier au vide réglementaire relatif à l'estimation de la vulnérabilité
sismique des portiques autostables en béton armé. Des expressions ont été proposées reliant le
163
rapport volumétrique de l'armature transversale ( sh), l’effort normal réduit ( 0NN ) et la
flexibilité des poteaux ( iL ) selon la classe de ductilité et le niveau d’endommagement
souhaité. Ces expressions permettent d’introduire un taux d’armature ajustable pour les
différents poteaux en prenant en considération une descente de charge différente ainsi qu’un
déplacement de niveau constant conduisant à une meilleure cohérence du comportement
global. Cette alternativepermet le contrôle sur la déformation locale tout en s’accordant d’une
part avec l’idée de capacité de déformation d’ensemble par rapport à un niveau
d’endommagement désiré; et d’autre part avec l’approche de dimensionnement parasismique
en performances. Ainsi on pourra alors parler de capacité de déformation de niveau à l’instar
d’un déplacement de niveau. Les résultats obtenus ont également permis de délimiter le
coffrage des poteaux fonction du niveau d’endommagement recherché et ont montré que le
déplacement relatif de niveau à observer tel que recommandé par le code RPA99 doit être
réduit afin d’éviter une éventuelle perte de stabilité structurelle résultante d’un
endommagement excessif.
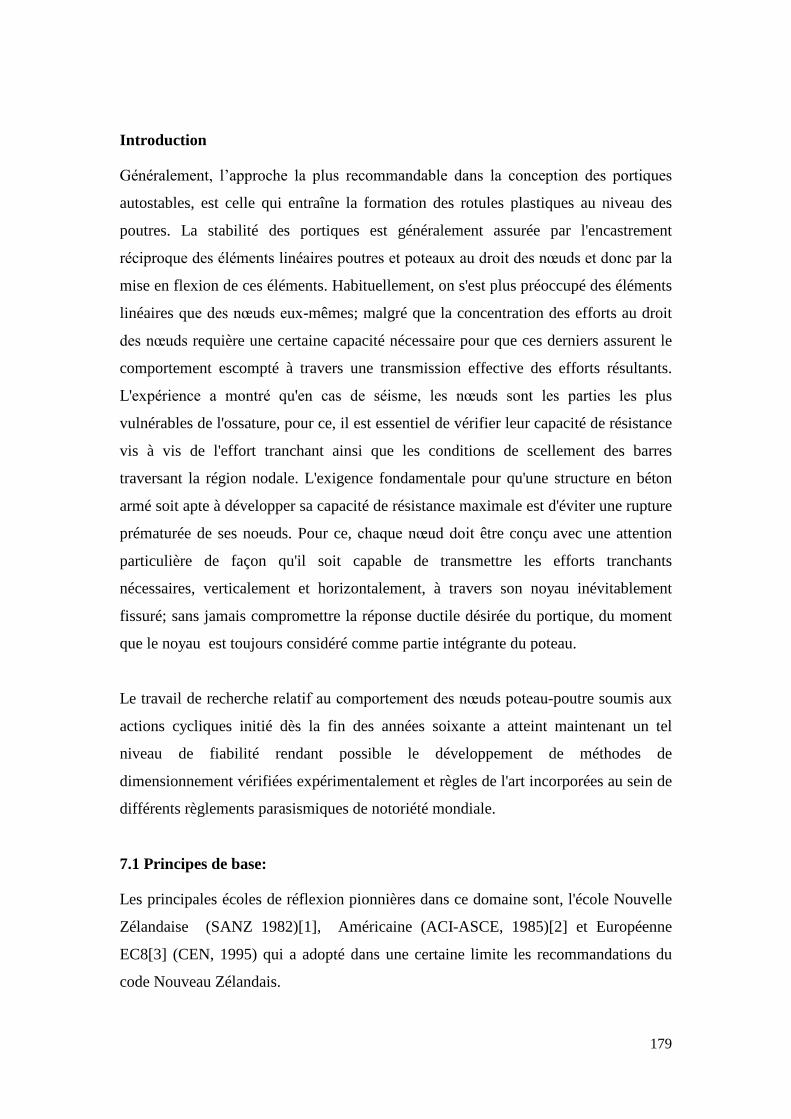
179
Introduction
Généralement, l’approche la plus recommandable dans la conception des portiques
autostables, est celle qui entraîne la formation des rotules plastiques au niveau des
poutres. La stabilité des portiques est généralement assurée par l'encastrement
réciproque des éléments linéaires poutres et poteaux au droit des nœuds et donc par la
mise en flexion de ces éléments. Habituellement, on s'est plus préoccupé des éléments
linéaires que des nœuds eux-mêmes; malgré que la concentration des efforts au droit
des nœuds requière une certaine capacité nécessaire pour que ces derniers assurent le
comportement escompté à travers une transmission effective des efforts résultants.
L'expérience a montré qu'en cas de séisme, les nœuds sont les parties les plus
vulnérables de l'ossature, pour ce, il est essentiel de vérifier leur capacité de résistance
vis à vis de l'effort tranchant ainsi que les conditions de scellement des barres
traversant la région nodale. L'exigence fondamentale pour qu'une structure en béton
armé soit apte à développer sa capacité de résistance maximale est d'éviter une rupture
prématurée de ses noeuds. Pour ce, chaque nœud doit être conçu avec une attention
particulière de façon qu'il soit capable de transmettre les efforts tranchants
nécessaires, verticalement et horizontalement, à travers son noyau inévitablement
fissuré; sans jamais compromettre la réponse ductile désirée du portique, du moment
que le noyau est toujours considéré comme partie intégrante du poteau.
Le travail de recherche relatif au comportement des nœuds poteau-poutre soumis aux
actions cycliques initié dès la fin des années soixante a atteint maintenant un tel
niveau de fiabilité rendant possible le développement de méthodes de
dimensionnement vérifiées expérimentalement et règles de l'art incorporées au sein de
différents règlements parasismiques de notoriété mondiale.
7.1 Principes de base:
Les principales écoles de réflexion pionnières dans ce domaine sont, l'école Nouvelle
Zélandaise (SANZ 1982)[1], Américaine (ACI-ASCE, 1985)[2] et Européenne
EC8[3] (CEN, 1995) qui a adopté dans une certaine limite les recommandations du
code Nouveau Zélandais.

180
Les principes de base relatifs au dimensionnement des nœuds sont plus ou moins les
mêmes et peuvent être résumés [4] comme suit:
1. du moment que la réparation du noyau du nœud est très difficile à réaliseret d'une
efficacité douteuse, il devient donc impératif d'éviter la dissipation d'énergie à
travers des mécanismes caractérisés par la dégradation substantielle de résistance et
de rigidité sous actions cycliques; pour ce, la résistance du nœud ne doit pas être
inférieure au plus faible des éléments concourants.
2. la capacité de résistance du poteau ne doit pas être mis en péril par une possible
dégradation de la résistance du noyau dunœud.
3.afin d'éviter toute réparation, il est toujours souhaitable que le nœud reste dans le
domaine élastique sous une action sismique d'intensité modérée.
4. afin de faciliter la réalisation, l'armature nécessaire garantissant la performance
parasismique adéquate doit être disposée de façon que la congestion du nœudsoit
évitée.
La satisfaction des exigences précitées dépend essentiellement du type du nœud, du
moment que beaucoup de difficultés sont à considérer pour le cas des nœuds
intérieurs comparativement aux nœuds extérieurs. Pour le cas des nœuds d'angle la
situation est beaucoup plus favorable et les contrôles supplémentaires ne sont pas
nécessaires.
L'intégrité des nœuds est un maillon essentiel, et sa résistance doit normalement
contrôler la résistance de l'ossature, c'est à dire permettre à chaque élément de
l'assemblage (poteaux et poutres) de développer les sollicitations pour lesquelles ils
ont été calculés. Plusieurs types de mécanismes de ruine peuvent être envisagés
(figure 7.1) :
a- capacité de déformation au niveau des poutres est atteinte
b- capacité de déformation au niveau des poteaux est atteinte, conduisant à
l'apparition des rotules plastiques au niveau des poteaux (mécanisme à éviter)

181
c- éclatement du béton d'enrobage sur les différentes faces du noyau du noeud,
peut conduire à une réduction significative de la capacité portante du poteau
(cette réduction est tributaire du rapport de l'aire de béton confiné sur l'aire
brute totale).
d- ruine par manque d'adhérence des barres longitudinales traversant le nœud,
conduisant inévitablement à une détérioration de la résistance accompagnée
par d'importantes déformations permanentes, d'où une importante réduction de
rigidité de l'assemblage poteau-poutre.
e- ruine du noyau du noeud par manque de résistance vis à vis de l'effort
tranchant, a la même incidence sur la résistance et la rigidité du noyau que le
mode de ruine précédent.
Figure 7.1 Différents mécanismes de ruine possibles
Dans le but d'assurer le mode de ruine favorable (a), il devient donc nécessaire de
vérifier les points suivants:
1- résistance flexionnelle relative entre éléments (poteaux et poutres) concourants
au noeud
2- résistance du noyau du noeud à l'effort tranchant dans les deux sens horizontal
et vertical.

182
3- ancrage requis des barres longitudinales des éléments traversant le noeud ou
ancrées dans son noyau.
7.2Comportement des nœuds sous cisaillement alterné (cyclique)
Le comportement des nœuds poteau-poutre sous chargement cyclique est caractérisé
par une interaction entre mécanismes de cisaillement, d'adhérence et de confinement.
De considérables différences existent au sein des différents codes parasismiques
concernant les aspects précédemment énumérés non seulement celles relatives au
mécanisme de transfert de cisaillement mais aussi même pour les forces de calcul du
noyau du nœud. Ces différences sont justifiables dans une certaine limite par les
incertitudes relevées dans le domaine de la réponse post élastique.
1- Efforts tranchants dans le noyau
Les noyaux sont assimilés à des zones de transfert [5-8] sujettes à des efforts
tranchants et des forces d’adhérence importantes. Ils ont principalement pour rôle:
de préserver l’intégrité du nœud afin que les capacités de résistance et de
déformation des éléments qui y aboutissent puissent être atteintes, ce qui exige
un confinement adéquat de la zone nodale.
d’éviter la dégradation excessive de la rigidité du nœud, ce qui nécessite:
- un ferraillage transversal adéquat du noyau,
- un ancrage ou une longueur de scellement adéquate des barres
longitudinales (poteau - poutre).
de se prémunir contre la rupture brutale par cisaillement en lui conférant la
capacité de résistance appropriée.
Les efforts tranchants verticaux ( nvV ) et horizontaux ( nhV ) revenant au noyau du
nœud sont évalués en considérant son équilibre statique, (Figure7.2), tout en faisant
abstraction des efforts normaux [7,8] (poutre-poteau) :
col2s2c1nh VCCTV col1s1c2 VCCT
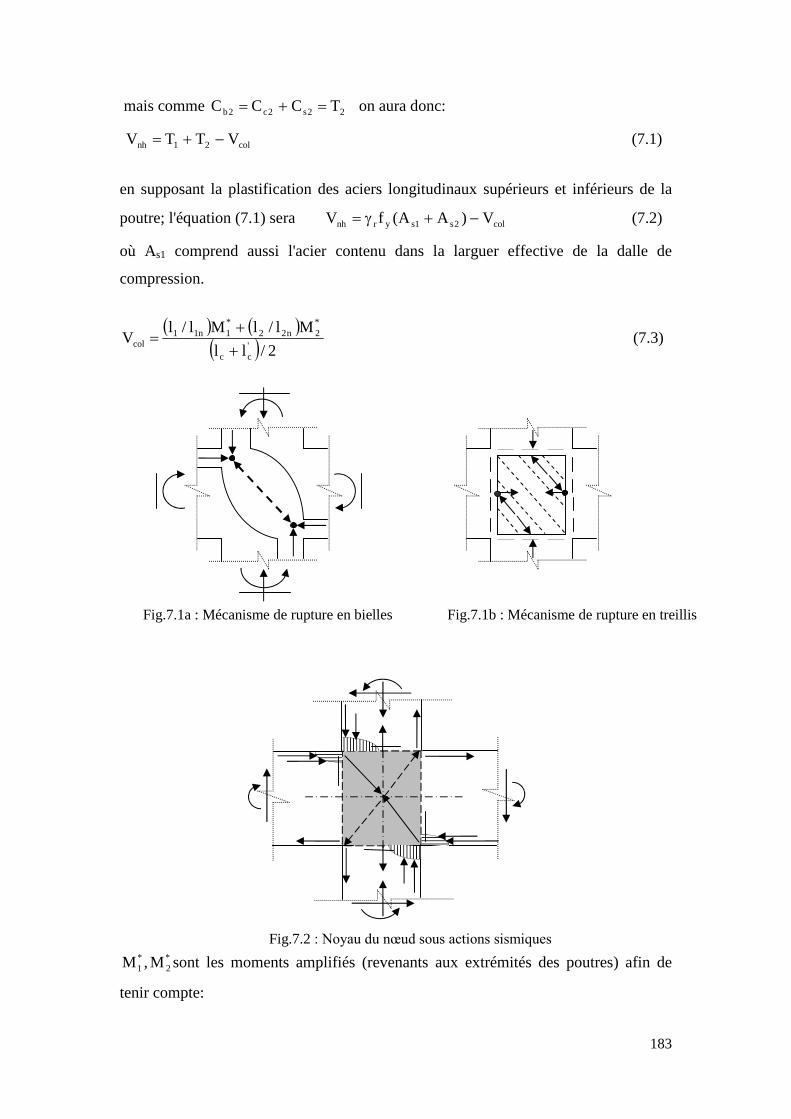
183
mais comme 22s2c2b TCCC on aura donc:
col21nh VTTV (7.1)
en supposant la plastification des aciers longitudinaux supérieurs et inférieurs de la
poutre; l'équation (7.1) sera col2s1syrnh V)AA(fV (7.2)
où As1 comprend aussi l'acier contenu dans la larguer effective de la dalle de
compression.
2/ll
Ml/lMl/lV
'cc
*2n22
*1n11
col
(7.3)
*2
*1 M,M sont les moments amplifiés (revenants aux extrémités des poutres) afin de
tenir compte:
Fig.7.1a : Mécanisme de rupture en bielles Fig.7.1b : Mécanisme de rupture en treillis
Fig.7.2: Noyau du nœud sous actions sismiques

184
a- du nouveau taux de travail des aciers qui peut être supérieur à celui adopté pour le
dimensionnement
b- augmentation du taux de travail des aciers dû à l'écrouissage de ces derniers
l1, l2: portées des poutres mesurées entre axes des poteaux
l1n, l2n: portées libres des poutres mesurées entre nus
l1, l2: hauteurs des poteaux mesurées entre axes des poutres
L'effort tranchant vertical (Vnv) peut être déterminé de la même façon, ou simplement
en considérant que les contraintes tangentielles horizontales et verticales du noyau
sont égales nvnh . En considérant par mesure de simplicité que ces contraintes
sont uniformément distribuées sur chaque face du noyau, on peut alors écrire que :
bn
nv
cn
nh
hbV
hbV
d'où l'effort tranchant verticalc
bnhnv h
h.VV (7.4)
où bn est la largeur effective du noyau
La même procédure peut être appliquée pour un nœud extérieur afin d'estimer
respectivement les efforts tranchants horizontal et vertical. Du moment qu'une seule
poutre arrive au noeud, l'effort tranchant résultant dans le noyau sera inférieur à celui
du noeud interne, dans ce cas
col1syrnh VAfV et le deuxième terme *2M sera négligé.
7.3Résistance du nœud à l'effort tranchant:
7.3.1.Mécanisme bielles-treillis
La résistance du noyau aux efforts tranchants s'articule sur 2 mécanismes [8] en
bielles et en treillis. Le premier mécanisme, représenté sur la Figure 7.3a, consiste à
transférer les efforts tranchants par le biais de la diagonale comprimée du béton. Cette
diagonale Dc est la conjugaison des forces de compression de béton (Ccbi sur la face
des poutres et Ccci sur la face des poteaux), les efforts tranchants (Vbi et Vcol) des
poutres et des poteaux et les forces d'adhérence (ΔTcbi, ΔTcci) transférés par l'armature
longitudinale dans les zones comprimées. Cheung et al [8] ont suggéré que la
contribution de ce mécanisme à transférer l'effort tranchant dans le noyau peut
respectivement être estimée horizontalement et verticalement comme suit:
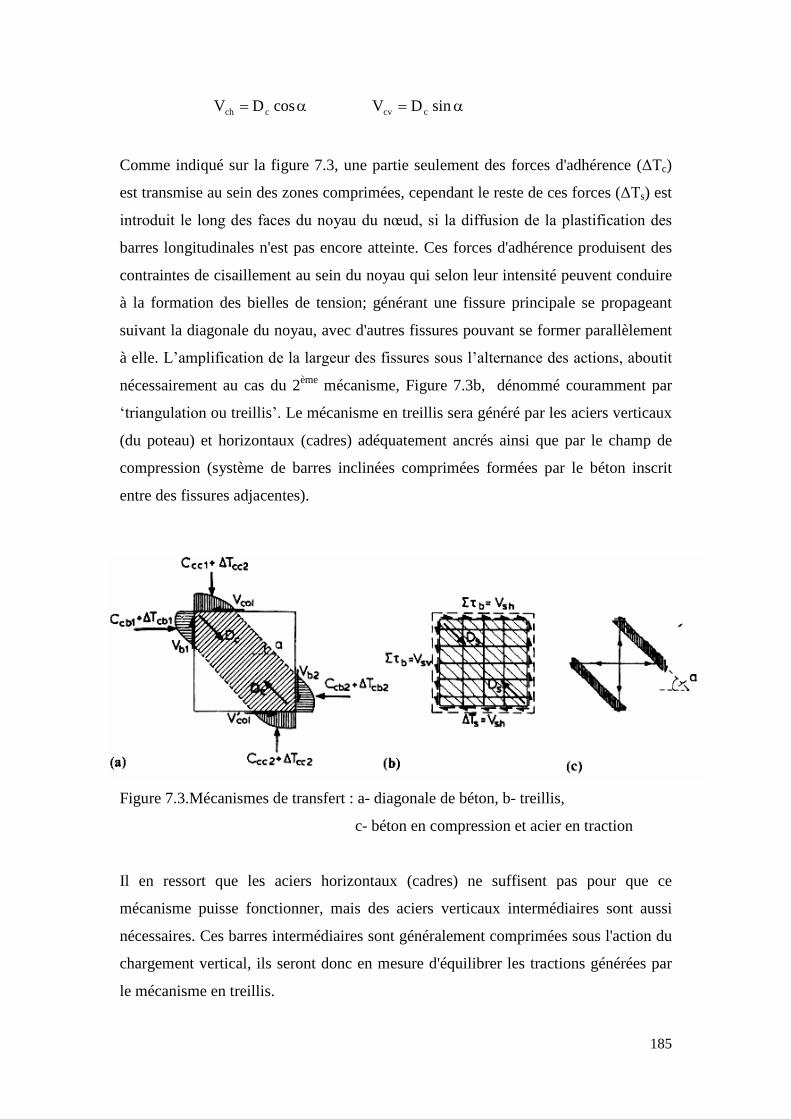
185
cosDV cch sinDV ccv
Comme indiqué sur la figure 7.3, une partie seulement des forces d'adhérence (ΔTc)
est transmise au sein des zones comprimées, cependant le reste de ces forces (ΔTs) est
introduit le long des faces du noyau du nœud, si la diffusion de la plastification des
barres longitudinales n'est pas encore atteinte. Ces forces d'adhérence produisent des
contraintes de cisaillement au sein du noyau qui selon leur intensité peuvent conduire
à la formation des bielles de tension; générant une fissure principale se propageant
suivant la diagonale du noyau, avec d'autres fissures pouvant se former parallèlement
à elle. L’amplification de la largeur des fissures sous l’alternance des actions, aboutit
nécessairement au cas du 2ème mécanisme, Figure 7.3b, dénommé couramment par
‘triangulationou treillis’.Le mécanisme en treillis sera généré par les aciers verticaux
(du poteau) et horizontaux (cadres) adéquatement ancrés ainsi que par le champ de
compression (système de barres inclinées comprimées formées par le béton inscrit
entre des fissures adjacentes).
Figure 7.3.Mécanismes de transfert : a- diagonale de béton, b- treillis,
c- béton en compression et acier en traction
Il en ressort que les aciers horizontaux (cadres) ne suffisent pas pour que ce
mécanisme puisse fonctionner, mais des aciers verticaux intermédiaires sont aussi
nécessaires. Ces barres intermédiaires sont généralement comprimées sous l'action du
chargement vertical, ils seront donc en mesure d'équilibrer les tractions générées par
le mécanisme en treillis.

186
L'équilibre statique des forces représentées sur la figure 7.3b, montre que ce
mécanisme peut supporter un effort tranchant:
horizontal cosDV ssh
et vertical sinDV ssv
L'effort tranchant résistant total développé par le noyau sera donc la superposition des
efforts tranchants donnés par les deux mécanismes:
svcvnv VVV et shchnh VVV
Les sections totales d’acier résistant aux efforts dans les deux directions peuvent être
simplement évaluées en utilisant les prescriptions du NZS:
yh
shnh f
VA représentant l'aire totale de l'armature transversale
etyv
svnv f
VA représentant l'aire totale des barres intermédiaires du poteau
Pour assurer la résistance adéquate vis à vis de l’effort tranchant, il est nécessaire de
se prémunir contre l’écrasement prématuré de la bielle de béton à l’intérieur du noyau,
conservant ainsi son intégrité en minorant la résistance du béton sur cylindre. Dans ce
contexte, les codes ACI et NZS recommandent la valeur de α 'cof comme valeur
limite. Il est clair que les régions des rotules plastiques des poteaux soumis à la
flexion composée, au dessus et au dessous du nœud doivent être confinées. La même
mesure n’est pas à envisager à l’intérieur du noyau[8], du moment que ce dernier
n’est pas soumis à des déformations de compression inélastiques importantes.
On peut donc conclure que les armatures transversales à l’intérieur du noyau ont pour
rôle d’assurer la résistance vis à vis de l’effort tranchant et non pas le confinement du
béton [7].
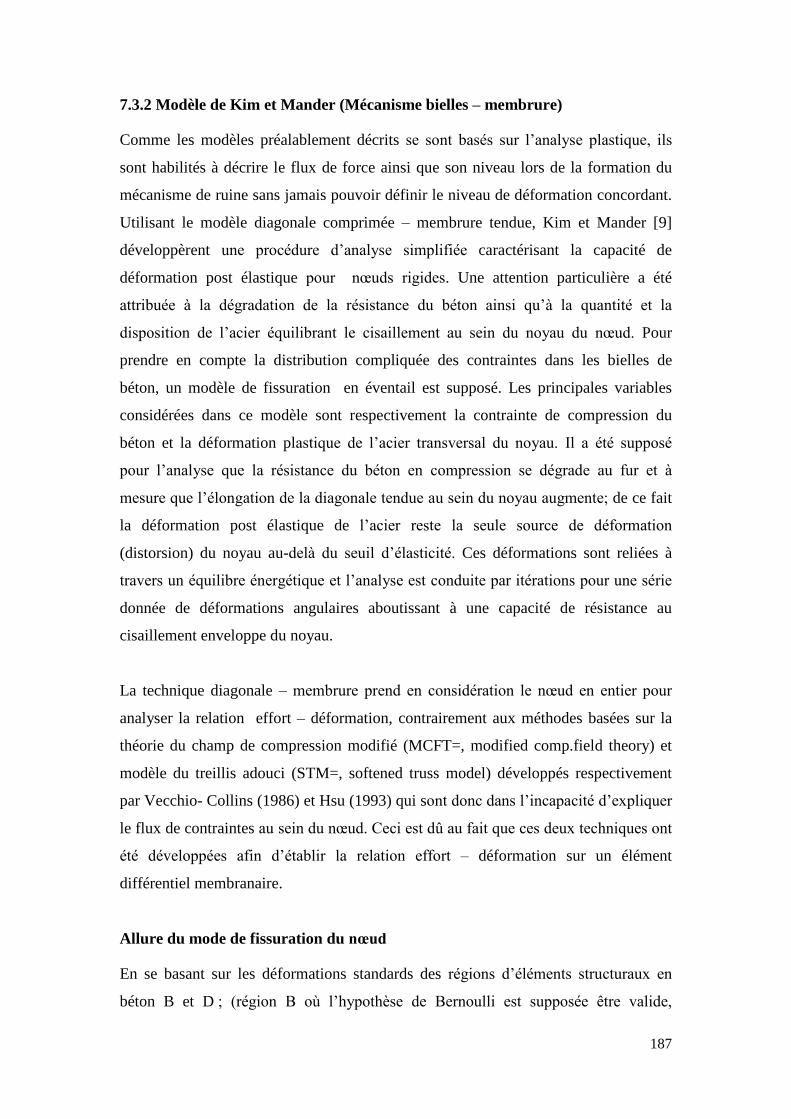
187
7.3.2 Modèle de Kim et Mander (Mécanisme bielles–membrure)
Comme les modèles préalablement décrits se sont basés sur l’analyse plastique, ils
sont habilités à décrire le flux de force ainsi que son niveau lors de la formation du
mécanisme de ruine sans jamais pouvoir définir le niveau de déformation concordant.
Utilisant le modèle diagonale comprimée –membrure tendue, Kim et Mander [9]
développèrent une procédure d’analyse simplifiée caractérisant la capacité de
déformation post élastique pour nœuds rigides. Une attention particulière a été
attribuée à la dégradation de la résistance du béton ainsi qu’à la quantité et la
disposition de l’acier équilibrant le cisaillement au sein du noyau du nœud. Pour
prendre en compte la distribution compliquée des contraintes dans les bielles de
béton, un modèle de fissuration en éventail est supposé. Les principales variables
considérées dans ce modèle sont respectivement la contrainte de compression du
béton et la déformation plastique de l’acier transversal du noyau. Il a été supposé
pour l’analyse que la résistance du béton en compression se dégrade au fur et à
mesure que l’élongation de la diagonale tendue au sein du noyau augmente;de ce fait
la déformation post élastique de l’acier reste la seule source de déformation
(distorsion) du noyau au-delà du seuil d’élasticité.Ces déformations sont reliées à
travers un équilibre énergétique et l’analyse est conduite par itérations pour une série
donnée de déformations angulaires aboutissant à une capacité de résistance au
cisaillement enveloppe du noyau.
La technique diagonale – membrure prend en considération le nœud en entier pour
analyser la relation effort –déformation, contrairement aux méthodes basées sur la
théorie du champ de compression modifié (MCFT=, modified comp.field theory) et
modèle du treillis adouci (STM=, softened truss model) développés respectivement
par Vecchio- Collins (1986) et Hsu (1993) qui sont donc dans l’incapacité d’expliquer
le flux de contraintesau sein du nœud. Ceci est dû au fait que ces deux techniques ont
été développées afin d’établir la relation effort –déformation sur un élément
différentiel membranaire.
Allure du mode de fissuration dunœud
En se basant sur les déformations standards des régions d’éléments structuraux en
béton B et D; (région B où l’hypothèse de Bernoulli est supposée être valide,
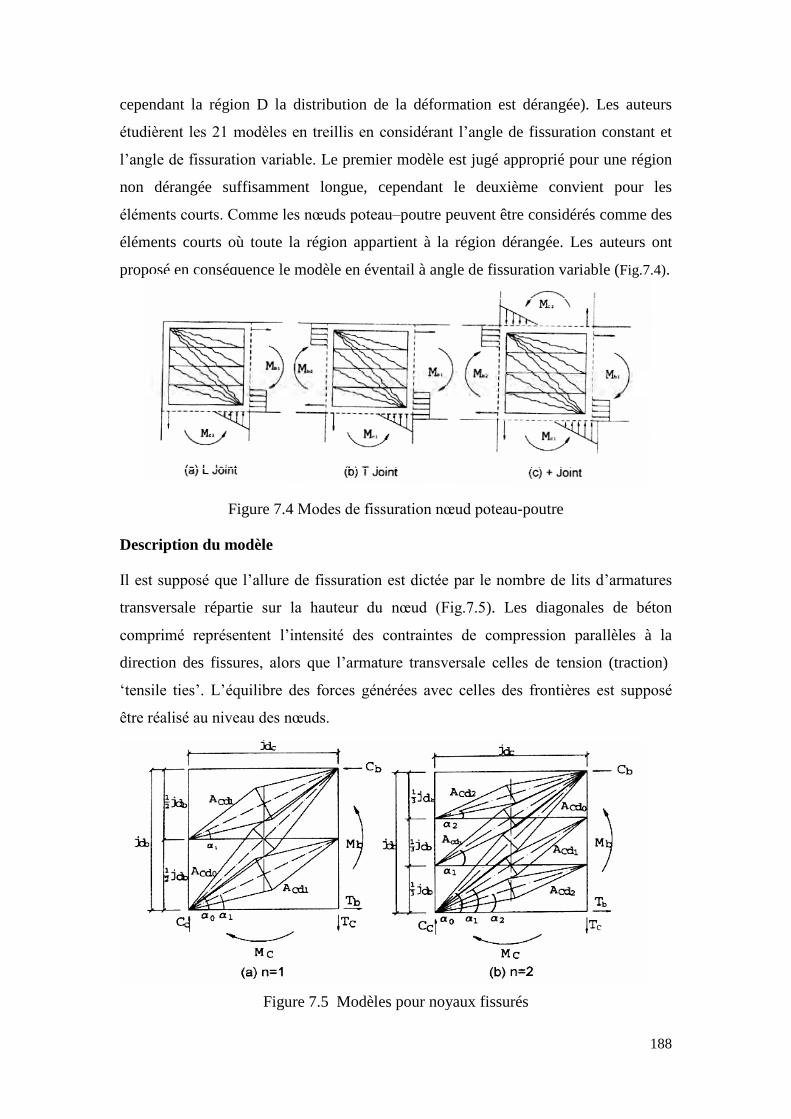
188
cependant la région D la distribution de la déformation est dérangée). Les auteurs
étudièrent les 21 modèles en treillis en considérant l’angle de fissuration constant et
l’angle de fissuration variable.Le premier modèle est jugé approprié pour une région
non dérangée suffisamment longue, cependant le deuxième convient pour les
éléments courts. Comme les nœuds poteau–poutre peuvent être considérés comme des
éléments courts où toute la région appartient à la région dérangée. Les auteurs ont
proposé en conséquence le modèle en éventail à angle de fissuration variable (Fig.7.4).
Figure 7.4Modes de fissuration nœud poteau-poutre
Description du modèle
Il est supposé que l’allure de fissuration est dictée par le nombre de lits d’armatures
transversale répartie sur la hauteur du nœud (Fig.7.5). Les diagonales de béton
comprimé représentent l’intensité des contraintes de compression parallèles à la
direction des fissures, alors que l’armature transversale celles de tension (traction)
‘tensile ties’. L’équilibre des forces générées avec celles des frontières est supposé
être réalisé au niveau des nœuds.
Figure 7.5 Modèles pour noyaux fissurés

189
Equilibre des forces
Force dans la i ème diagonale cdicdicdi A.fF (7.5)
bi
2i
cdi jd.b)cos1)(n1(2
cosA
c
b1i jd
jdn1
i1tan
en se basant sur la relation empirique de Vecchio et Colins (1986) traduisant la limite
supérieure des contraintes de compression dans la direction des fissures des éléments
panneaux soumis au cisaillement :
11708.01
ff
1'c
maxcd
(7.6)
1représente l’élongation
la force (eq.7.5) est équilibrée par l’armature tendue: 0i,cos
fAF
i
yshcdi
shA : aire d’un court d’armature transversale.
i
y
ib
i2
sh
icdi
ysh
cdi
cdicdi cos
f
cos.jd.b)cos1)(n1(A2
cosA
fA
AF
f
n1jd
s b
,
s.bA sh
v
yi
2i
2sh
cdi fcos
cos1s.b
A2f
yi
2vcdi fcos
112f
1f
f
cos1
12ff
'c
y
i2v'
c
cdi
(7.7)
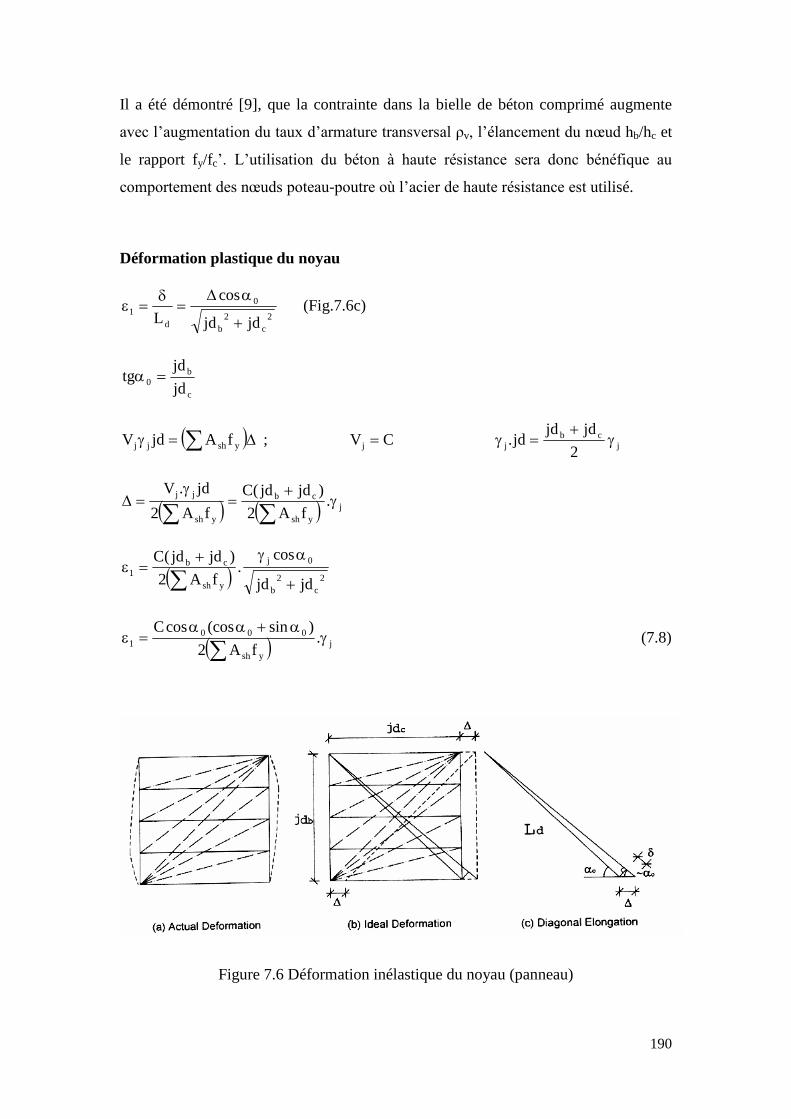
190
Il a été démontré [9], que la contrainte dans la bielle de béton comprimé augmente
avec l’augmentation du taux d’armature transversal ρv, l’élancement du nœud hb/hc et
le rapport fy/fc’. L’utilisation du béton à haute résistance sera donc bénéfique au
comportement des nœuds poteau-poutre où l’acier de haute résistance est utilisé.
Déformation plastique du noyau
2c
2b
0
d1
jdjd
cosL
(Fig.7.6c)
c
b0 jd
jdtg
yshjj fAjdV ; CVj jcb
j 2jdjd
jd.
jysh
cb
ysh
jj .fA2
)jdjd(CfA2
jd.V
2c
2b
0j
ysh
cb1
jdjd
cos.
fA2)jdjd(C
jysh
0001 .
fA2)sin(coscosC
(7.8)
Figure 7.6 Déformation inélastique du noyau (panneau)
191
a/- rotule plastique se forme dans le poteau
cCC
n
1iicdi00cdc sinF2sinFC
b/- rotule plastique se forme dans la poutre
bCC
n
0iicdib cosFC
i=0 indique bielle en diagonale
initial
j CC
D
la déformation du nœud est donnée par l’équation7.8, comprend la déformation
élastique et inélastique. L’élongation sert à évaluer la limite supérieure de la
contrainte de compression dans la bielle de béton.
Comme conclusion de leur étude, les auteurs recommandent la densification de
l’armature transversale à mi-hauteur du nœud, qui peut être plus effective en
fournissant une ductilité après fissuration, retardant ainsi la dégradation de résistance
des diagonales comprimées de béton.
7.3.3. Mécanisme Bakir–Boduroglu
Exploitant un large data expérimental et utilisant le modèle bielle - membrure Bakir et
al [10,11] étudièrent les différents facteurs influant la capacité de résistance au
cisaillement des nœuds extérieurs sous chargement monotone. L’équilibre des forces
d’un élément panneau exige:
horizontalement une contrainte transversale moyenne de compression
wbeff
sjes
beff
sx f
hb
Af
hbA

192
verticalement une contrainte normale moyenne
ceffscol
ceff
scoly hb
Nf
hbA
et une contrainte de cisaillement moyenne
tg
xav ,
tg
avy
en posantw
s
ff
ils obtiennent les expressions donnant les déformations dans les 2
directions
beff
sje
beff
ss
av
s
wx
hb
A
hbA
E
tg.Ef
sscol
ceff
ceff
avy E.A
hbhb
Ntg
d’où la déformation principale de traction
scol
2
c
b
ceff
scol
beff
sj
beff
sbc
bav2
c
bs
1 A
hh
N
hbA
1
hb
A
hb.A
1hh
hh
1E
1(7.9)
Il est apparent que la déformation principale de traction augmente avec
l’augmentation de l’élancement du noyau (hb/hc), le taux d’armature longitudinale du
poteau scol ainsi que de la charge qui lui revient. Cependant cette déformation est
défavorablement affectée par l’augmentation du taux d’armature longitudinale de la
poutre sbainsi que du taux d’armature transversale du noyau sh .
193
Ils proposèrent les relations suivantes reliant sb au taux sh , garantissant un
comportement adéquat des nœuds sous chargement monotone:
ybb
ccbc
2csb f.d.b.h
250f1fbbh18.0
%5.0%3.0 sh ; sh moyen
ybb
ccbc
2csb f.d.b.h
250f1fbbh22.0
%5.0sh ; sh important
%6.0sh conduisant à la ruine de la poutre même si
ybb
ccbc
2csb f.d.b.h
250f1fbbh15.0
hb : hauteur de la poutre
bc : largeur du poteau,
bb : largeur de la poutre
ils recommandèrent pour le dimensionnement de l’armature transversale du noyau
l’expression suivante :
ysje61.0
c
b
ccbc
4289.0
b
sb
fA
hh
fh2
bbdb
A10071.0
V
(7.10)
003.0sh 664.0 faible quantité d’armature transversale
005.0sh 6.0 quantité d’armaturemoyenne transversale
005.0sh 37.0 grandequantité d’armature transversale
0.71; facteur réducteur de la capacité de résistance du nœud au cisaillementdéterminé empiriquement
1 pour les barres en L
85.0 pour les barres en U
37.1 pour les barres inclinées
1 pour les barres normales
Ils recommandèrentd’éviter l’utilisation des barres en U et constatèrent que
l’armature transversale dans le nœud ainsi que l’augmentation de l’armature
longitudinale de la poutre améliore sa capacité de résistance au cisaillement.
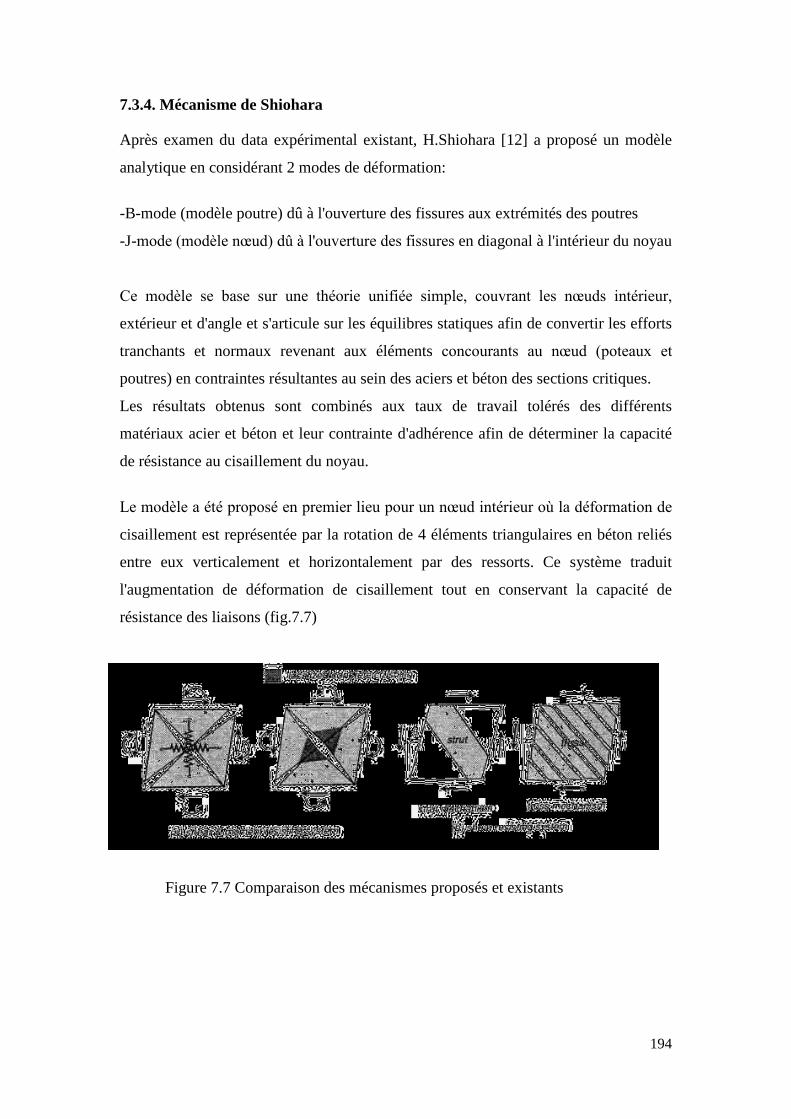
194
7.3.4. Mécanisme de Shiohara
Après examen du data expérimental existant, H.Shiohara [12] a proposé un modèle
analytique en considérant 2 modes de déformation:
-B-mode (modèle poutre) dû à l'ouverture des fissures aux extrémités des poutres
-J-mode (modèle nœud) dû à l'ouverture des fissuresen diagonal à l'intérieur du noyau
Ce modèle se base sur une théorie unifiée simple, couvrant les nœuds intérieur,
extérieur et d'angle et s'articule sur les équilibres statiques afin de convertir les efforts
tranchants et normaux revenant aux éléments concourants au nœud (poteaux et
poutres) en contraintes résultantes au sein des aciers et béton des sections critiques.
Les résultats obtenus sont combinés aux taux de travail tolérés des différents
matériaux acier et béton et leur contrainte d'adhérence afin de déterminer la capacité
de résistance au cisaillement du noyau.
Le modèle a été proposé en premier lieu pour un nœud intérieur où la déformation de
cisaillement est représentée par la rotation de 4 éléments triangulaires en béton reliés
entre eux verticalement et horizontalement par des ressorts. Ce système traduit
l'augmentation de déformation de cisaillement tout en conservant la capacité de
résistance des liaisons (fig.7.7)
Figure 7.7 Comparaison des mécanismes proposés et existants
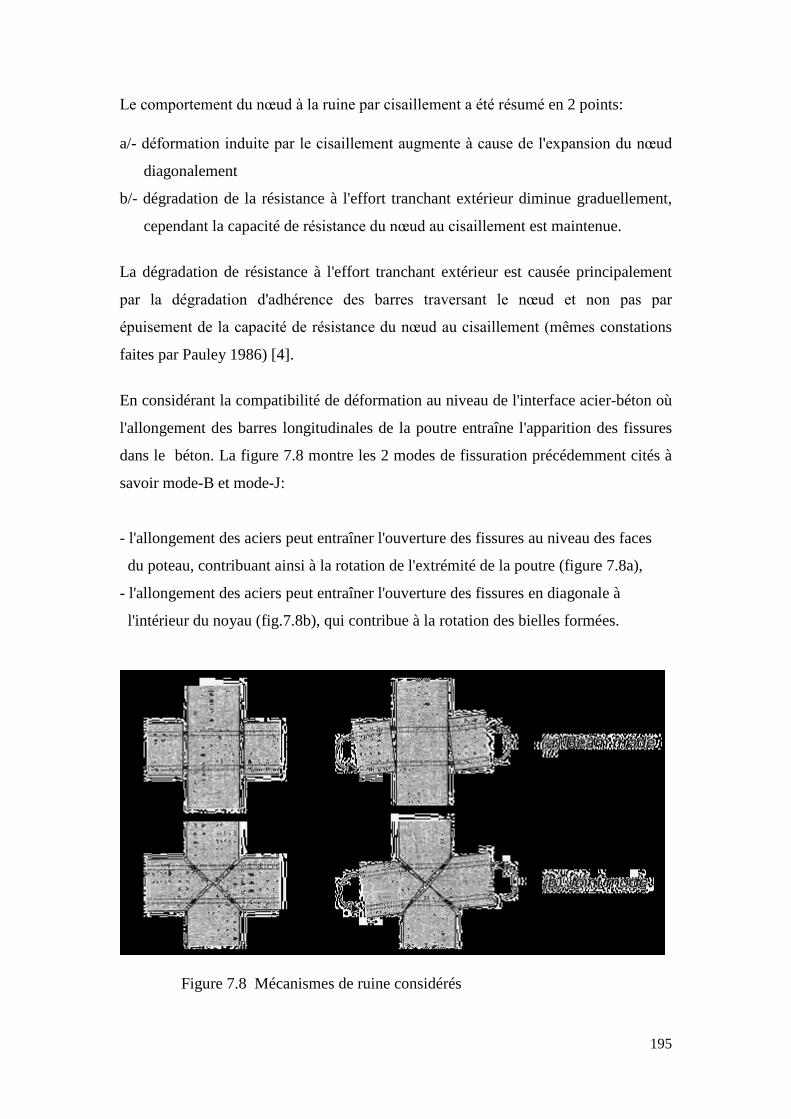
195
Le comportement du nœud à la ruine par cisaillement a été résuméen 2 points:
a/- déformation induite par le cisaillement augmente à cause de l'expansion du nœud
diagonalement
b/- dégradation de la résistance à l'effort tranchant extérieur diminue graduellement,
cependant la capacité derésistance du nœud au cisaillement est maintenue.
La dégradation de résistance à l'effort tranchant extérieur est causée principalement
par la dégradation d'adhérence des barres traversant le nœud et non pas par
épuisement de la capacité de résistance du nœud au cisaillement (mêmes constations
faites par Pauley 1986) [4].
En considérant la compatibilité de déformation au niveau de l'interface acier-béton où
l'allongement des barres longitudinales de la poutre entraîne l'apparition des fissures
dans le béton. La figure 7.8 montre les 2 modes de fissuration précédemment cités à
savoir mode-B et mode-J:
- l'allongement des aciers peut entraîner l'ouverture des fissures au niveau des faces
du poteau, contribuant ainsi à la rotation de l'extrémité de la poutre (figure 7.8a),
- l'allongement des aciers peut entraîner l'ouverture des fissures en diagonale à
l'intérieur du noyau (fig.7.8b), qui contribue à la rotation des bielles formées.
Figure 7.8 Mécanismes de ruine considérés
196
Le mode (B) est le mode de déformation favorable car la déformation enregistrée est
considérée comme relativement faible. Cependant le 2ème mode de fissuration (J) est
le plus dangereux vu que la déformation résultante du cisaillement est trop importante
provoquant l'écrasement du béton au centre du noyau, suite aux grandes rotations des
bielles.
Pour évaluer les capacités de résistance des 2 modes, l'idée de base utilisée coïncide
avec la théorie de la section fléchie, cependant l'hypothèse que les sections planes
restent planes n'a pas été prise en compte, tout en prenant en considération l'effet de
glissement. Si 1T et 2T représentent les forces mobilisées par les barres longitudinales
traversant les sections critiques 21 TTT est considérée égalisant la force
d'ancrage par adhérence entre acier et béton à l'intérieur du noyau.
Mode de déformation type B
En considérant l'équilibre statique (Fig.7.9) la relation entre 1T et 2T et le moment
bM au niveau de section critique est établie comme suit:
2NTT
bb
21
NTTh2
TTM b21
b
cb21n
21b (7.11)
Figure 7.9 Forces internes agissant sur les sections critiques, mode-B
les effort tranchants (Vb: poutre, Vc: poteau) seront tirés de la relation précédente
( bM ) en considérant la géométrie de la sous structure (position des points
d'inflexion), et les contraintes tangentielles nB en considérant uniquement les 7/8 de la
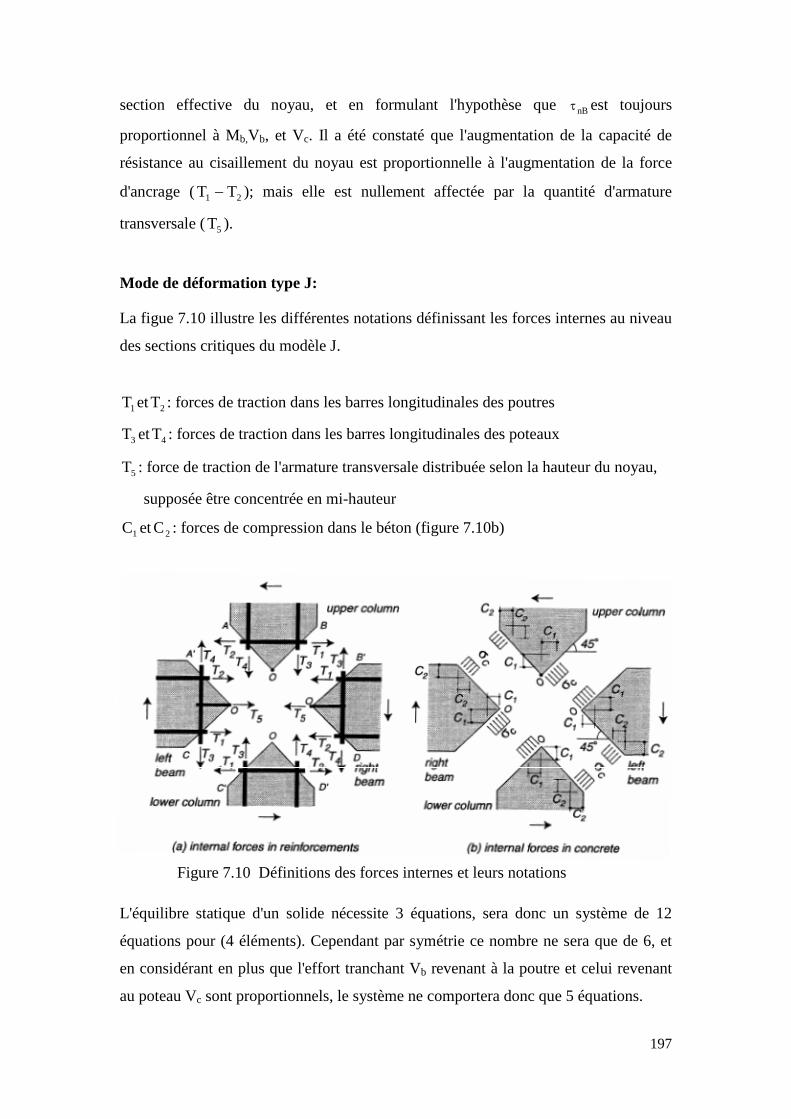
197
section effective du noyau, et en formulant l'hypothèse que nB est toujours
proportionnel à Mb,Vb, et Vc. Il a été constaté que l'augmentation de la capacité de
résistance au cisaillement du noyau est proportionnelle à l'augmentation de la force
d'ancrage ( 21 TT ); mais elle est nullement affectée par la quantité d'armature
transversale ( 5T ).
Mode de déformation type J:
La figue 7.10 illustre les différentes notations définissant les forces internes au niveau
des sections critiques du modèle J.
1T et 2T : forces de traction dans les barres longitudinales des poutres
3T et 4T : forces de traction dans les barres longitudinales des poteaux
5T : force de traction de l'armature transversale distribuée selon la hauteur du noyau,
supposée être concentrée en mi-hauteur
1C et 2C : forces de compression dans le béton (figure 7.10b)
L'équilibre statique d'un solide nécessite 3 équations, sera donc un système de 12
équations pour (4 éléments). Cependant par symétrie ce nombre ne sera que de 6, et
en considérant en plus que l'effort tranchant Vb revenant à la poutre et celui revenant
au poteau Vc sont proportionnels, le système ne comportera donc que 5 équations.
Figure 7.10 Définitions des forces internes et leurs notations

198
L'équilibre des forces suivant x et y de la poutre de droite donne:
Horizontalement: 0NCCTTT b21521
Verticalement: 0VCCTT c2143
Le moment par rapport à O
0CC)C1(C)TT(j21
)TT(j21
V2L
11222143c
L'équilibre des forces suivant x et y du poteau au dessus (supérieur)
0VCCTT c2121 (7.12)
0NCCTT c2143 (7.13)
Le système d'équations solutionné donne l'effort tranchant Vc, 521 T,T,T (données)
2143 C,C,T,T sont déterminées et la contrainte de cisaillement du noyau nJ est
obtenue fonction de 21 T,T en utilisant les mêmes hypothèses que pour le cas (B).
Ce modèle a le privilège de prendre en compte l'interaction de plusieurs facteurs:
- effort tranchant extérieur
- force d'adhérence
- quantité d'armature transversale
- efforts axiaux revenant aux éléments linéaires
les contraintes de cisaillement nB et nJ développées par les 2 modes de
caractéristiques différentes ne sont pas identiques, d'où des capacités de résistance
différentes.
L'étude paramétrique menée, a permis de constater que:
- les capacités de résistance et de déformation du noyau sont fortement affectées par
l'effort tranchant extérieur, la force d'adhérence et leur interaction.
- l'augmentation de la capacité d'adhérence augmente la capacité de résistance et de
déformation du noyau.
199
7.3.5. Influence du cisaillement alterné sur les mécanismes de transfert:
Il a été reconnu que l'alternance des déformations inélastiques de grandes amplitudes
provoque des élongations permanentes des barres longitudinales qui conduisent
éventuellement à l'ouverture de fissures sur toute la profondeur de la section
d'interface poteau-poutre. Pour ce, les forces d'adhérence des barres comprimées
seront amplifiées car les forces de compression antérieurement mobilisées au sein du
béton seront maintenant négligeables. Ce report de charges provoqué par la migration
de la plastification des poutres au noyau du nœud se fera ressentir à l'intérieur du
noyau; induisant des contraintes d'adhérence élevées prés du centre de ce dernier
conduisant inévitablement au glissement des barres. Dans ce contexte Cheung et al [8]
ont proposé les relations suivantes:
nhch V5.313.0V (7.14)
NV5.0V nvcv (7.15)
On peut remarquer que pour un poteau faiblement comprimé )0( , 30% de l'effort
tranchant horizontal revenant au noyau peut être supporté par des bielles de béton
comprimé. L'action cyclique provoque une diagonalisation de la fissuration dans les 2
sens menant à une contrainte de compression effective des bielles de béton inférieure
à la résistance sur cylindre.
Une analyse d'un data expérimental (32 spécimens) réduit uniquement aux noeuds
intérieurs de portiques de rive sans poutres transversales, et où la ruine été due à une
incapacité de résistance du noeud au cisaillement ou une inadéquate rotulation de la
poutre, a été menée par Lehman & al [13]. Le data expérimental a été subdivisé en 2
catégories, les spécimens ruinés par mode de cisaillement et ceux ruiné par rotulation
de la poutre. L'analyse a été faite en prenant en compte la contrainte de cisaillement
du noeud vis à vis de la résistance du béton en compression et a montré:
1- qu'exprimer la contrainte de cisaillement du noeud fonction de la résistance en
compression du béton donne une meilleure indication sur la performance du noeud
2- que la limite de la contrainte de cisaillement fixée à 0.14f'c (Psi) assure la rotulation
des poutres du moment que cette ligne sépare le ruine par cisaillement de celle par

200
rotulation, et les résultats relatifs à ce dernier mode se trouvent en dessous de cette
limite. Ils ont proposé 2 expressions pour évaluer l'effort tranchant résistant, en reliant
la contrainte de cisaillement normalisée )f( 'cN à la ductilité de déplacement
cumulé:
N'c
N'c
N
A.fV
f
31.0170f '
c
N
(7.16)
NV : effort tranchant max revenant au nœud
NA : section effective du noeud
5.1n
1iyyi /5.0
la 2ème expression a été formulée de façon à englober l'influence du taux d'acier de
renforcement ( vn ) du noyau, ainsi que l'effort normal réduit:
'
cg
'cyhvn
'c
N
fAP1*14
ff16
f
(7.17)
Il faut noter en dernier, que le modèle mécanique des mécanismes de transfert de
cisaillement suggéré initialement par l'école Nouvelle Zélandaise, quoique validé
expérimentalement et repris ultérieurement par l'école Européenne est loin d'être
partagé par l'école Américaine qui à travers les recommandations purement
empiriques des codes ACI-ASCE cherche à établir des limites inférieures appropriées
sur le plus grand nombre de résultats expérimentaux définissant ainsi la résistance
nominale maximale au cisaillement. Du moment que ces recommandations
s'articulent sur le besoin de confiner le noyau par l'armature transversale et les poutres
encadrant le noyau; )MPaenf( 2/1ccmax fonction du type du nœud.
avec 33.1,0.1,75.0,6.0c respectivement pour γ=12, 15, 20, 24
γ= 24 pour les nœuds confinés sur les 4 faces,
γ= 20 pour les nœuds confinés sur les 2 faces opposées,
γ= 15 pour nœud confinésur une seule face, et γ = 12 pour les nœuds d'angle.
201
7.4. Facteurs influençant la résistance du noeud
7.4.1. Influence des poutres transversales et hourdis de planchers
La présence d'un hourdi monolithique coulé avec les poutres formant le nœud, qui est
la situation courante dans pratique, affecte sa résistance ainsi que sa rigidité (Ehsani &
Wight, Durrani & Zerbe, Kitayama, Otani & Aoyama 1989) [4]. Cependant cette
influence n'est pas sans risque si le comportement parasismique est considéré; car
parallèlement à l'axe de la poutre l'hourdi se comporte comme une semelle supérieure
tendue et augmente donc la résistance flexionnelle de la poutre. Ne pas prendre en
considération cette surrésistance lors du dimensionnement des poteaux adjacents
peut provoquer la rotulation de ces derniers.
Ceci va à l'encontre de l'hypothèse que les poteaux restent élastiques lorsque les
poutres en se rotulant développent leur surrésistance flexionnelle [8]. Le code NZS
recommande des largeurs effectives à prendre en compte évaluées à:
- 4hs de part et d'autre du nœud pour les poteaux internes.
- 2hs de part et d'autre du nœud pour les poteaux extérieurs.
La présence des poutres transversales a été aussi trouvée favorable en améliorant la
résistance à l'effort tranchant par augmentation de la section résistante effective du
nœud et le confinement fourni par celles-ci en empêchant la dilatation du noyau après
fissuration de ce dernier.
Exception faite pour les poutres transversales concourantes à un nœud extérieur; où
l'effet de la torsion est induite aux bords de ces poutres, et de ce fait ces dernières ne
sont effectives en confinant le noyau qu'avant leur résistance torsionnelle ne soit
réduite après fissuration (Durrani & Zerbe 1987) [4].
7.4.2 Ancrage des barres longitudinales des poutres
Pour pouvoir conserver les rotulations dans les poutres des nœuds intermédiaires au
niveau des nus d’appui, l’armature longitudinale de la poutre peut se plastifier
simultanément en compression d’un côté, et en traction de l’autre (Fig.7.2). Il en
découle que les effets seront cumulés et la force de plastification sera doublée,
menant à des contraintes d’adhérence trop importantes. Ceci peut conduire à une
202
dégradation de l’adhérence résultant au glissement de ces armatures; provoquant la
diffusion de la plastification au sein du noyau. Il s’avère aussi avantageux de réparer
des dégâts engendrés par des déformations plastiques de flexion, que de restaurer la
résistance par adhérence ou celle de l’effort tranchant dans le noyau.
Force d'adhérence:
Kitayama & al [14] ont mené un travail expérimental sur des nœuds intérieurs sous
sollicitations réversibles avec charge verticale maintenue constante afin d'étudier le
mécanisme de rupture et la relation entre l'effort tranchant extérieur et l'effort
tranchant résistant développé par le nœud. Quatre cas de spécimens ont été envisagés;
conventionnel, armature longitudinale de la poutre a été doublée à l'intérieur du
noyau, armature de la poutre sont non adhérentes à l'intérieur du noyau, et armature
de la poutre et du poteau est non adhérente à l'intérieur du noyau.
Il a été constaté que l'adhérence des barres traversant le noyau joue un rôle important
sur la capacité de résistance du nœud au cisaillement. L'élimination partielle (poutre)
de la force d'adhérence et totale (poutre et poteau) a enregistré respectivement 11% et
21% de chute de résistance par rapport au cas conventionnel. Le maximum de
résistance a été trouvé mobilisé pour un angle de distorsion (distorsion drift) de 2% de
valeur et ce, pour tous les cas étudiés, après cela la chute se fait graduellement.
Le pincement des boucles d'hystérésis a été principalement dû à la détérioration du
béton à l'intérieur du noyau, caractérisée par des fissures se propageant en diagonale.
L'ouverture de ces fissures devient de plus en plus ample pour le cas où le transfert
d'adhérence à l'intérieur du noyau a été éliminé partiellement ou totalement.
Limitation du diamètre des barres longitudinales
Des études menées par Cheung et al [8] ont révélées que le diamètre des barres
longitudinales des poutres et poteaux traversant le noyau du nœud nedoit pas être
excessif afin d’assurer un ancrage adéquat et éviter ainsi une rupture d’adhérence
prématurée. Ce facteur doit être pris en considération vu son incidence appréciable
sur le comportement du nœud vis à vis de l’action sismique.
203
Pour éviter la dégradation d’adhérence dans les barres des poutres au niveau du
noyau, le code NZS préconise de limiter le rapport cbl hd fonction de 'cof et yf :
y
'co
c
bl
f
f.
hd
yc
bl
f12
hd
Il est plus commode de spécifier la longueur de scellement en fonction du diamètre et
du nombre de barres traversant le noyau du nœud.
7.5 Considérations réglementaires
A titre d'indication quelques recommandations établies par l'EC8 sont reproduites
(ou reprises) dans ce qui suit, du moment qu'aucune clause réglementaire relative à ce
point n'a tété formulée par le code RPA99.
7.5.1. Effort tranchant
Malgré les divergences relevées entre les différentes approches concernant le
dimensionnement du nœud vis à vis de l'effort tranchant, un consensus semble être
établi entre les chercheurs concerné par ce domaine, en exprimant l'intensité de l'effort
tranchant revenant au nœud fonction de la contrainte nominale de cisaillement.
Les résultats des tests ont mis en relief l'influence directe de l'intensité de l'effort
tranchant sur l'endommagement (fissuration) et la déformation du noyau ainsi que sur
l'adhérence des barres longitudinales, créant ainsi les conditions provoquant le
pincement des boucles d'hystérésis, donc la réduction de la dissipation d'énergie du
nœud. Il a été conclu[4] que la combinaison d'une faible contrainte de cisaillement
avec une quantité limitée d'acier de renforcement est plus effective si la dissipation
d'énergie est considérée, évitant aussi par l'occasion les difficultés de construction.
Evaluation des efforts:
Conformément au dimensionnement en capacité adopté par l'EC8, l'effort tranchant
horizontal agissant sur le noyau est donné par les expressions:
colyd2s1sRdnh Vf)A5q
A(32
V
(7.18) pour nœud intérieur
colyd1sRdnh VfA)3/2(V (7.19) pour nœud extérieur

204
15.1,25.1Rd respectivement pour les classes de ductilité 'H', et 'M'
NB. aucune allusion n'a été faite à l'effort tranchant vertical revenant au noeud
Vérification de la résistance:
L'EC8 exige que la diagonale comprimée induite par le mécanisme en treillis, ne doit
pas dépasser la capacité de résistance du béton. A défaut de models raffinés les
relations suivantes sont suggérées:
1.noeud intérieur Rdnh 20V (7.20)
2.noeud extérieur Rdnh 15V (7.21)
si wc bb (largeur du poteau dépasse celle de la poutre) )h05b,bmin(b cwcn
si wc bb (non recommandable en pratique) )h05b,bmin(b ccwn
les équations 7.20 et 7.21 sont respectivement équivalentes à :
cnh f25.0 (7.20a) et cnh f20.0 (7.21a)
On peut dire que le noyau est confiné si l'armature horizontale satisfait la relation:
)f12(hb
Vhb
fAcddRdRd
ncn
nh
nwn
ydsh (7.22)
en plus une armature verticale est fournie conformément à:
nw
ncshsv h
hA
32
A (7.23)
2.1ou0.1 pour CD 'H' et 'M'
Détails
L'armature de confinement (horizontal) dans des nœuds poteau-poutre pour une classe
de ductilité 'H' et 'M', doit satisfaire les exigences minimales suivantes:
1. diamètre de l'armature transversale ne doit pas être inférieur à 6mm
2. avec un espacement )mm100;4hmin(s cw (7.24)
3.si des poutres concourent sur les 4 faces du nœud, cet espacement peut être

205
augmenté avec un espacement )mm150;2hmin(s cw (7.25)
7.5.2. Limitation du diamètre des barres longitudinales
L'EC8 préconise la recommandation suivante:
max2D
d
ydRd
ctm
c
bl
/k18.01
ff5.7
hd
50.0,75.0,0.1k D et 0.1,15.1,25.1Rd
respectivement pour les classes de ductilité 'H', 'M' et 'L'.
Pour les nœuds extérieurs le terme max2D /k1 peut être pris égal à l'unité, ce qui
conduit à des diamètres plus grands.
En guise de simplicité l'EC8 recommande pour les barres ancrées dans les noeuds
poteau-poutre les expressions suivantes:
Noeuds intérieurs
cdydctm1bl h8.01ffd (7.26a)
0.6,5.4,0.41 respectivement pour les classes de ductilité 'H', 'M' et 'L'.
Noeuds extérieurs
cdydctm2bl h8.01ffd (7.26.b)
5.7,5.6,0.62 respectivement pour les classes de ductilité 'H', 'M' et 'L'.
ces valeurs paraissent être excessives comparativement aux recommandations de
l’ACI-ASCE Committe 352:
10dh
b
c (nœud ext. sous chargement monotone)
20dh
b
c (nœud ext. sous chargement cyclique) afin de limiter le glissement des barres
hc : hauteur section du poteau
db : diamètre barre longitudinale de la poutre
7.6 Relation entre l'évolution de l'endommagement, contrainte de cisaillement
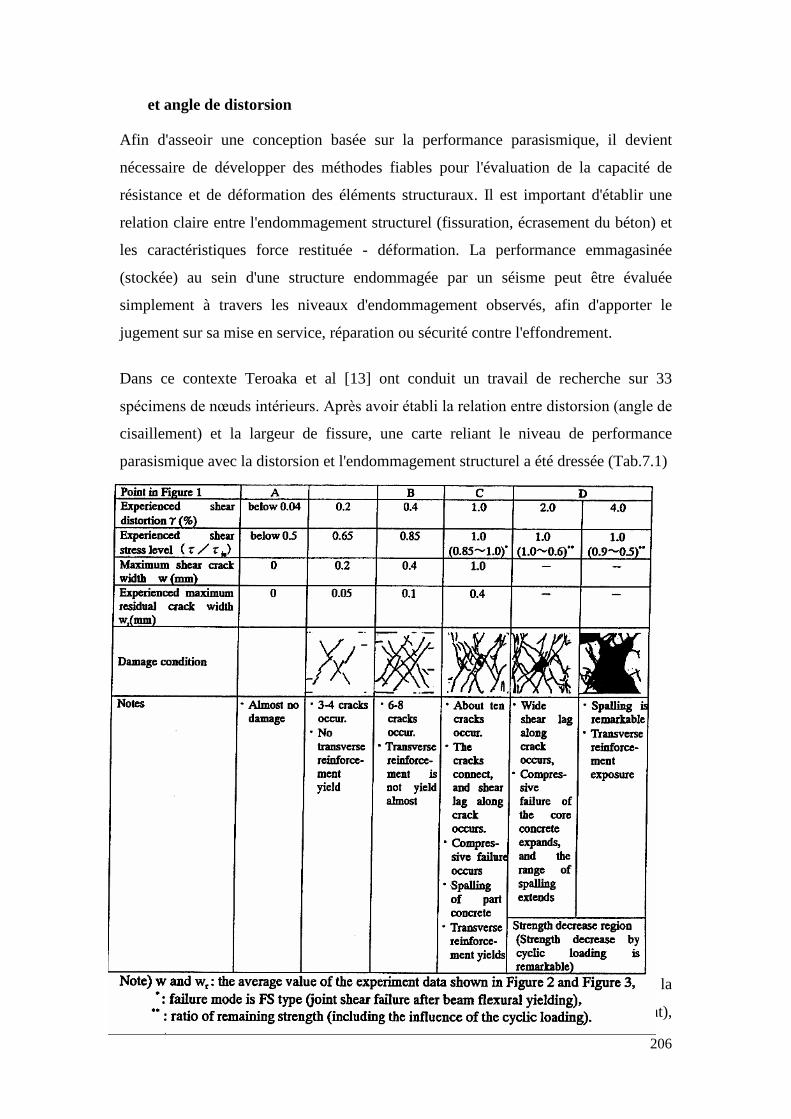
206
et angle de distorsion
Afin d'asseoir une conception basée sur la performance parasismique, il devient
nécessaire de développer des méthodes fiables pour l'évaluation de la capacité de
résistance et de déformation des éléments structuraux. Il est important d'établir une
relation claire entre l'endommagement structurel (fissuration, écrasement du béton) et
les caractéristiques force restituée - déformation. La performance emmagasinée
(stockée) au sein d'une structure endommagée par un séisme peut être évaluée
simplement à travers les niveaux d'endommagement observés, afin d'apporter le
jugement sur sa mise en service, réparation ou sécurité contre l'effondrement.
Dans ce contexte Teroaka et al [13] ont conduit un travail de recherche sur 33
spécimens de nœuds intérieurs. Après avoir établi la relation entre distorsion (angle de
cisaillement) et la largeur de fissure, une carte reliant le niveau de performance
parasismique avec la distorsion et l'endommagement structurel a été dressée (Tab.7.1)
La figure 7.11 montre la relation schématique entre distorsion - endommagement et la
performance parasismique résiduelle (service, réparation et sécurité à l'effondrement),
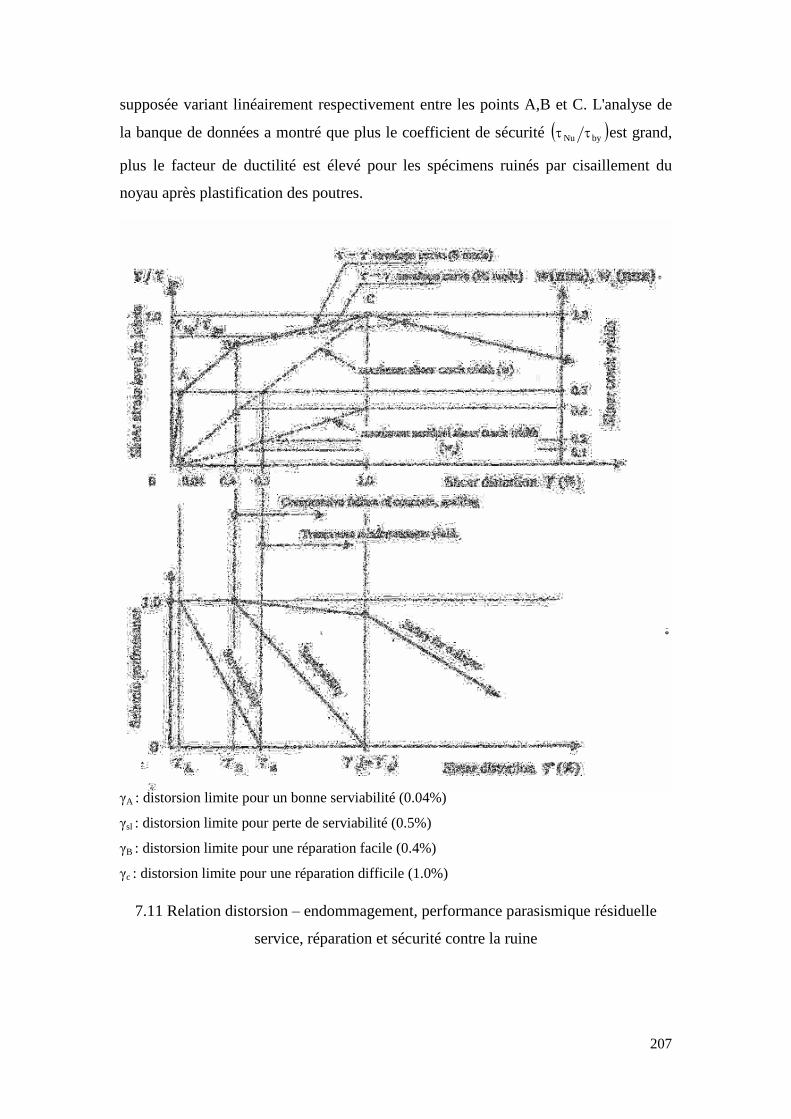
207
supposée variant linéairement respectivement entre les points A,B et C. L'analyse de
la banque de données a montré que plus le coefficient de sécurité byNu est grand,
plus le facteur de ductilité est élevé pour les spécimens ruinés par cisaillement du
noyau après plastification des poutres.
γA : distorsion limite pour un bonne serviabilité (0.04%)
γsl : distorsion limite pour perte de serviabilité (0.5%)
γB : distorsion limite pour une réparation facile (0.4%)
γc : distorsion limite pour une réparation difficile (1.0%)
7.11 Relation distorsion–endommagement, performance parasismique résiduelle
service, réparation et sécurité contre la ruine

208
Un coefficient de ductilité 4 a été obtenu pour un coefficient de sécurité
supérieur à 1.35. Le tableau suivant illustre les critères de dimensionnement
nécessaires au contrôle de l'endommagement du nœud (Tab.7.2)
1- ot2tsc .ff
tf : contrainte de traction du béton prise à 'cf15.0
o : contrainte axiale enregistrée sur la section du poteau
2- by : contrainte de cisaillement correspondante à la plastification de la poutre en
flexion
3- nnn
nunu Fk
DbV
atteinte pour %0.1u
contrainte ultime de cisaillement du noeud
k=1.0, 0.7, 0.4 respectivement pour nœud intérieur, extérieur et d'angle
=1.15 nœud avec poutres transversales sur les 2 faces et 1.0 pour les autres cas
)mm/N(f.8.0F 27.0cn
2a1abn bbbb avec
d
21
,4
hminb,b c
2a1a ,
d: distance entre face poutre–face poteau sur le côté transversal.
Un travail expérimental a été mené par Pantelides et al [14] pour l'évaluation des
nœuds extérieurs typiques aux bâtiments érigés avant 1970 de part lemonde, ne
répondant donc pas aux exigences réglementaires de nos jours. Les performances ont
été examinées en termes de capacité de résistance latérale, déplacement, rotation
plastique, ductilité…Différents états limites ainsi qu’un nouveau modèle diagonale -
membrure ont été proposés.
209
Les insuffisances concernant les détails des nœuds sont résumées comme suit:
- absence d'acier transversal à l'intérieur du noyau
- acier vertical du poteau n'est pas distribué sur le pourtour du nœud, mais concerne
uniquement 2 faces
- 4 spécimens ont une longueur de scellement des barres inférieures de la poutre plus
petite que celle requise
Cependant tous les spécimens satisfassent le rapport flexionnel poteau-poutre et la
nappe d'acier supérieur de la poutre répond aux exigences d'ancrage à l'intérieur du
nœud. Les 6 spécimens sont à échelle réelle, confectionnés avec 3 différents taux de
ferraillage, soumis à une charge axiale égalisant respectivement 10% et 25% de la
capacité nominale de la section; g'c A.f)25.0,10.0(N .
Deux modes de ruine ont été observés:
a- par manque d'adhérence
b- par cisaillement du noyau
L'angle de distorsion (plastique) correspondant au maximum de la charge latérale est
0.01rd et ce, pour tous les spécimens considérés. Il a été aussi relevé que la charge
axiale affecte favorablement la résistance du nœud tout en réduisant considérablement
la ductilité de déplacement et la dissipation d'énergie. Les 4 spécimens ruinés par
cisaillement du nœud ont enregistré une perte de résistance auxcharges verticales,
cependant ceux caractérisés par ruine d'adhérence ont enregistrés à la fin des tests une
perte de capacité de résistance aux charges latérales. Il a été conclu que les spécimens
qui ont péri par manque d'adhérence avaient une résistance, une contrainte principale
de traction, une distorsion ainsi qu'une dissipation d'énergie plus faible que celles où
la ruine a été dictée par cisaillement du noyau.
Cinq niveaux de performance ont été identifiés pour les 2 modes de ruine observés.
Ruine par manque d'adhérence:
1-plastification de l'acier longitudinal
2-mécanisme de glissement (rupture d'adhérence)
3-fissuration du noyau
4-éclatement du béton du coin où le manque d'adhérence s'est manifesté
5-perte de résistance vis à vis de la charge latérale

210
Rupture du noyau par cisaillement
1-plastification de l'acier longitudinal
2- fissuration du nœud
3-formation du mécanisme de ruine par cisaillement
4-éclatement du béton du noyau
5-perte de résistance aux charges verticale.
Les niveaux de performance énumérés sont utilisés pour identifier les états limites
concordants, en terme d'ouverture de fissures, angle de distorsion, et capacité de
résistance, c'est à dire niveau d'endommagement structurel.
7.7Proposition d’une relation contrôlant la distorsion à travers le taux
d’armature transversale du noyau:
S’accordant avec l’esprit de dimensionnement en performances, une formule
simplifiée est proposée reliant le taux d’armature transversale avec l’angle de
distorsion fixé. Considérant que la rotule plastique se forme dans la poutre, on peut
écrire :
jysh
0001 .
fA2)sin(coscosC
(7.8)
n
0iicdib cosFCC (7.27)
i
yshcdicdicdi cos
fAA.fF
et l’équation 7.27 sera :
y
n
0ishi
i
yshn
0iicdi fAcos
cos
fAcosFC
(7.28)
en injectant l’équation 7.28 dans l’équation 7.8on obtient :
j000
1 .2
)sin(coscos
(7.29)
ou encore :)sin(coscos
2
000
1j
(7.30)

211
considérant les relations caractérisant la compression dans la bielle de béton
11708.01
ff
1'c
maxcd
(7.6)
et 1f
f
cos1
12ff
'c
y
i2v'
c
cdi
(7.7)
on obtient :
8.0
f
f
cos1
12
1170
1
'c
y2v
1 (7.31a)
1'c
y
2
v
1708.0f
f
cos1
12
1
(7.31b)
s.bA sh
v et bshsh h.bA.n donne :s.b.nh.b
s.bA bshsh
v
comme1n
hs b
;l’équation précédente sera :
n)1n(sh
v
(7.32a)
1nn
vsh (7.32b)
Procédure directe
Posant telimjj on calcule la déformation 1 à ne pas dépasser (eq.7.29) d’où
v (éq.7.31b) et le reconvertir en sh (éq.7.32b). Le figure 7.11 illustre la variation de
sh contrôlant une distorsion %1j ; fonction de l’élancement du noyau (hb/hc), du
nombre de lits d’armature transversale et la résistance du béton pour un acier ayant un
taux de travail constant (fy = 400MPa). On peut constater que sh augmente avec la
résistance du béton et diminue avec l’élancement géométrique du noyau.
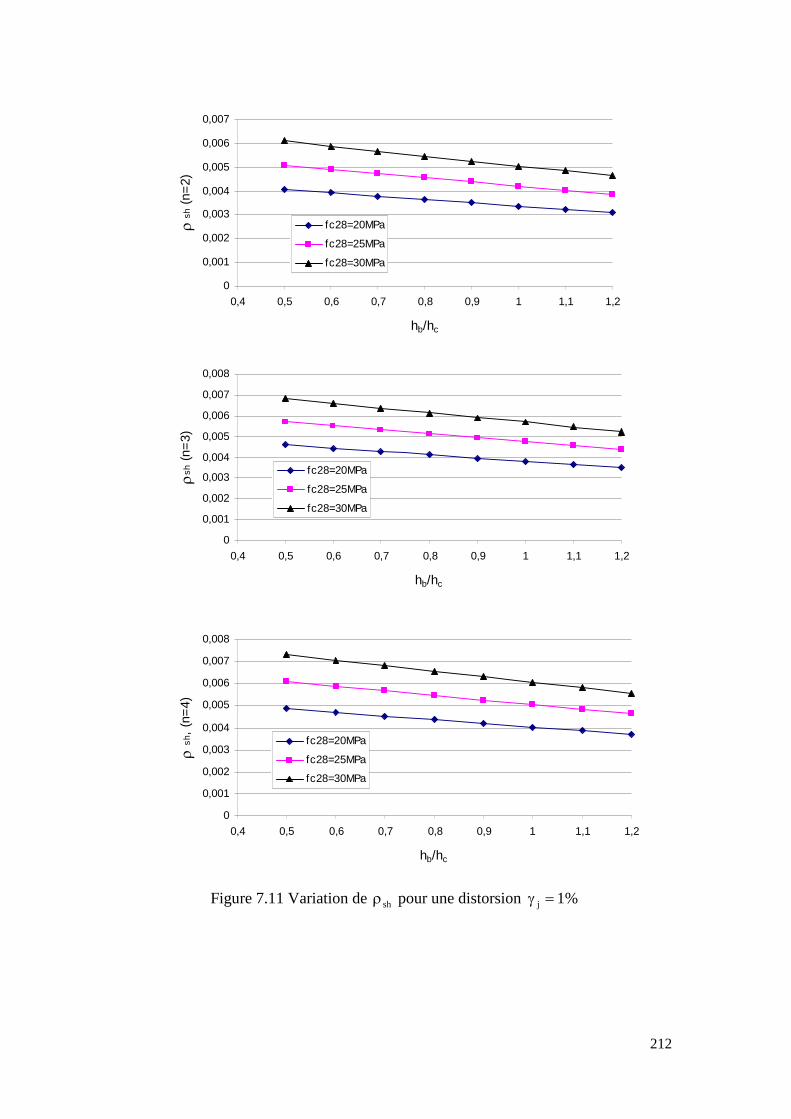
212
Figure 7.11 Variation de sh pour une distorsion %1j
0
0,001
0,002
0,003
0,004
0,005
0,006
0,007
0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2
hb/hc
ρsh
(n=
2)
fc28=20MPa
fc28=25MPa
fc28=30MPa
0
0,001
0,002
0,003
0,004
0,005
0,006
0,007
0,008
0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2
hb/hc
ρsh
(n=
3)
fc28=20MPa
fc28=25MPa
fc28=30MPa
0
0,001
0,002
0,003
0,004
0,005
0,006
0,007
0,008
0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2
hb/hc
ρsh
,(n
=4)
fc28=20MPa
fc28=25MPa
fc28=30MPa
213
Procédure indirecte (évaluation de la distorsion du noyau)
Une procédure inverse est utilisée, consistant en la détermination du taux d’armature
transversale dans le noyau à l’aide d’expressions de dimensionnement établies par le
code EC-8 ou recommandées par des chercheurs dans le domaine [11,17] en premier
lieu ; et évaluer l’angle de distorsion potentiel de la section en second lieu. Du
moment que les relations de dimensionnement sont formulées dans un esprit de
garantir une capacité de résistance adéquate au cisaillement, cette alternative permet
de s’assurer si la distorsion maximale résultante de la section reste bien inférieure à la
distorsion limite initialement fixée.
Etapes à considérer :
- déterminer sh
- le convertir en v (eq.7.32a)
- déterminer 1 (eq.7.31a)
- évaluation de j (eq.7.30)
EC-8
Le taux d’armature sh est déterminé en exploitant les relations (eq.7.20, eq.7.21 et
eq.7.22) pour la classe de ductilité H pour 2 cas de figure 1.0 et 2.0 . Le
tableau suivant résume les différentes valeurs de sh . Il faut souligner par ailleurs
l’effet d’élancement du noyau est omis dans la formulation réglementaire.
Taux d’armature transversale ( sh ) du noyaufc28 (MPa) 1.0 2.0
20 0.00182 0.00068
25 0.00226 0.0083
30 0.00270 0.0099
Les figures7.12 et 7.13 regroupent les différentes valeurs enregistrées pour l’angle de
distorsion. Leur examen montre que le noyau est très flexible pour le cas où 2.0 ,
allant à l’encontre de l’hypothèse des nœuds rigides adoptée généralement par les
différents codes en vigueur. Ceci a été dû à la prise en compte de l’effort axial

214
revenant au poteau dans l’évaluation de la résistance du noyau au cisaillement. Il a été
constaté par Kitayama et al [14] que la détérioration de l’adhérence des barres du
poteau se manifeste pour un angle de distorsion j=0.02, ceci montre que malgré les
valeurs enregistrées pour le cas où 1.0 sont relativement réduites, elles restent trop
importantes pouvant compromettre donc la sécurité du noyau.
Figure 7.12 Influence du nombre de litssur l’angle de distorsion(EC-8)
0
0,005
0,01
0,015
0,02
0,025
0,03
0,035
0,04
0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2 1,3
hb/hc
Ang
lede
dist
orsi
onγ,
( ν=
0,1)
fc28=20MPa, n=2
fc28=25MPa, n=2
fc28=30MPa, n=2
fc28=20MPa, n=3
fc28=25MPa, n=3
fc28=30MPa, n=3
0
0,02
0,04
0,06
0,08
0,1
0,12
0,14
0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2 1,3
hb/hc
Ang
lede
dist
orsi
onγ,
( ν=
0,2)
fc28=20MPA, n=2
fc28=25MPa, n=2
fc28=30MPa, n=2
fc28=20MPa, n=3
fc28=25MPa, n=3
fc28=30MPa, n=3
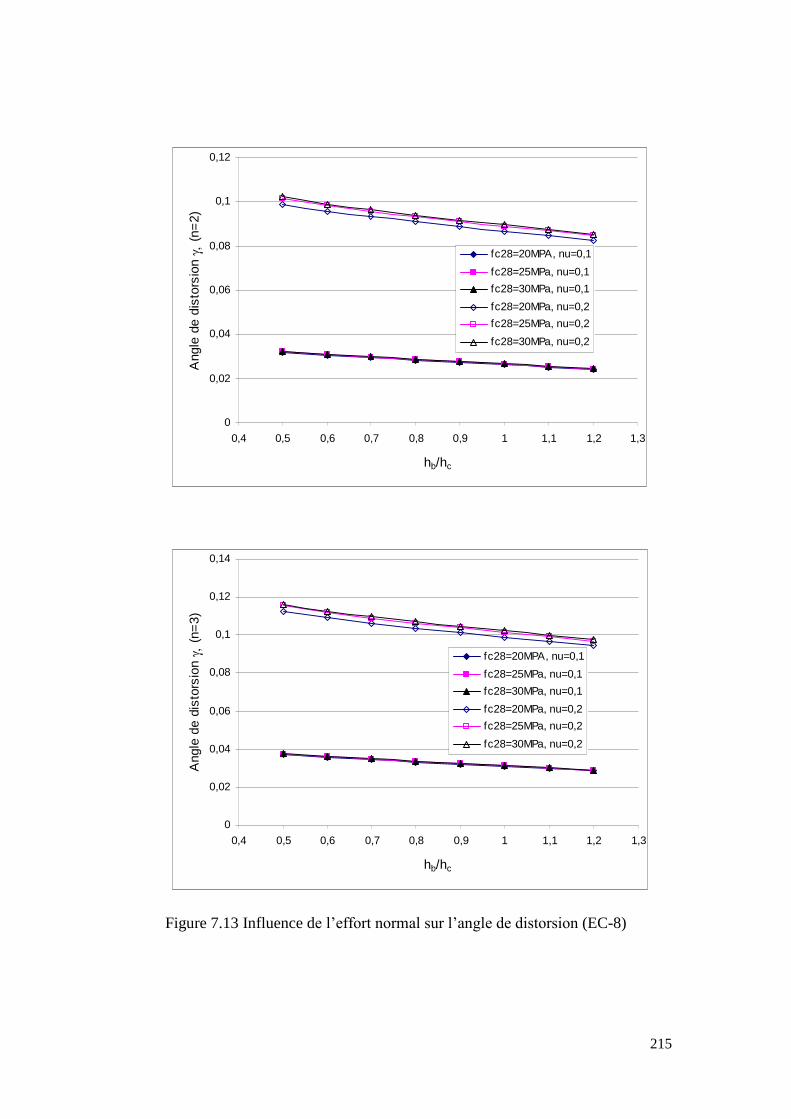
215
Figure 7.13 Influence de l’effort normal sur l’angle de distorsion(EC-8)
0
0,02
0,04
0,06
0,08
0,1
0,12
0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2 1,3
hb/hc
Ang
lede
dist
orsi
onγ,
(n=
2)
fc28=20MPA, nu=0,1
fc28=25MPa, nu=0,1
fc28=30MPa, nu=0,1
fc28=20MPa, nu=0,2
fc28=25MPa, nu=0,2
fc28=30MPa, nu=0,2
0
0,02
0,04
0,06
0,08
0,1
0,12
0,14
0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2 1,3
hb/hc
Ang
lede
dist
orsi
onγ,
(n=
3)
fc28=20MPA, nu=0,1
fc28=25MPa, nu=0,1
fc28=30MPa, nu=0,1
fc28=20MPa, nu=0,2
fc28=25MPa, nu=0,2
fc28=30MPa, nu=0,2

216
Heggar et al
Dans un travail récent Heggar et al [17] étudièrent les paramètres ayant incidence sur
la capacité de résistance au cisaillement notamment; l’élancement du nœud, le taux
d’armature longitudinale du poteau, la résistance du béton, l’efficacité de l’ancrage
des aciers de la poutre ainsi que letaux d’armature transversale et son efficacité sur le
noyau des nœuds intérieurs et extérieurs. Ils développèrent un modèle pour prédire la
charge ainsi que le mode de ruine des noyaux intérieurs et extérieurs; qui a été calibré
en utilisant les résultats de plus de 200 tests de chargement. Ils proposèrent les
relations suivantes :
Noeuds extérieurs
scn VVV
colj1c h.b.C.B.AV c
b
hh
3.02.1A 5.7
5.01B col 3
1'cf2C
1: facteur d’ancrage de l’armature longitudinale des poutres
95.01 si le retour de barre se fait à 90°
yeff,sj2s f.AV
2 :coefficient d’efficacité de l’armature transversale du noyau, pris égal à 0.6 pour
un angle de 90°
ccolj'c1321max V2)h.bf25.0).(..(V
efficacité de l’ancrage des barres de la poutre, et l’élancement du nœud
11
0.1f
2.15.1 'c
col2
0.1hh
6.09.1col
bl3
Relation de dimensionnement
cmaxscn V2VVVV
cj
3/1'c
c
b1c h.b.f
hh
6.04.2V

217
Noeuds intérieurs
cj'cn h.b.f.25.0V
ucol
2poutred
u
1poutred
uju V
j
M
j
MV
'c
byreq,dh
f3.3
dfl longueur d’ancrage minimale
L’illustration numérique qui suit s’intéresse uniquement au nœud extérieur et s’appuie
sur les relations suivantes :
Bakir et al
bjy61.0
c
b
ccbc
4289.0
b
sb
'ccjsh h.bf.
1
hh
fh2
bbdb
A10071.0
fh.b9155.0
Heggar et al
bjy
cj
3/1'c
bcj
'c
sh hbf6.0
h.bfhch
6.04.295.0h.b.f245.1
n)1n(sh
v
Les figures 7.14-7.18 regroupent les différentes valeurs du taux d’armature
transversale du noyau ainsi que de l’angle de distorsion pour les relations proposées
par les auteurs précités.
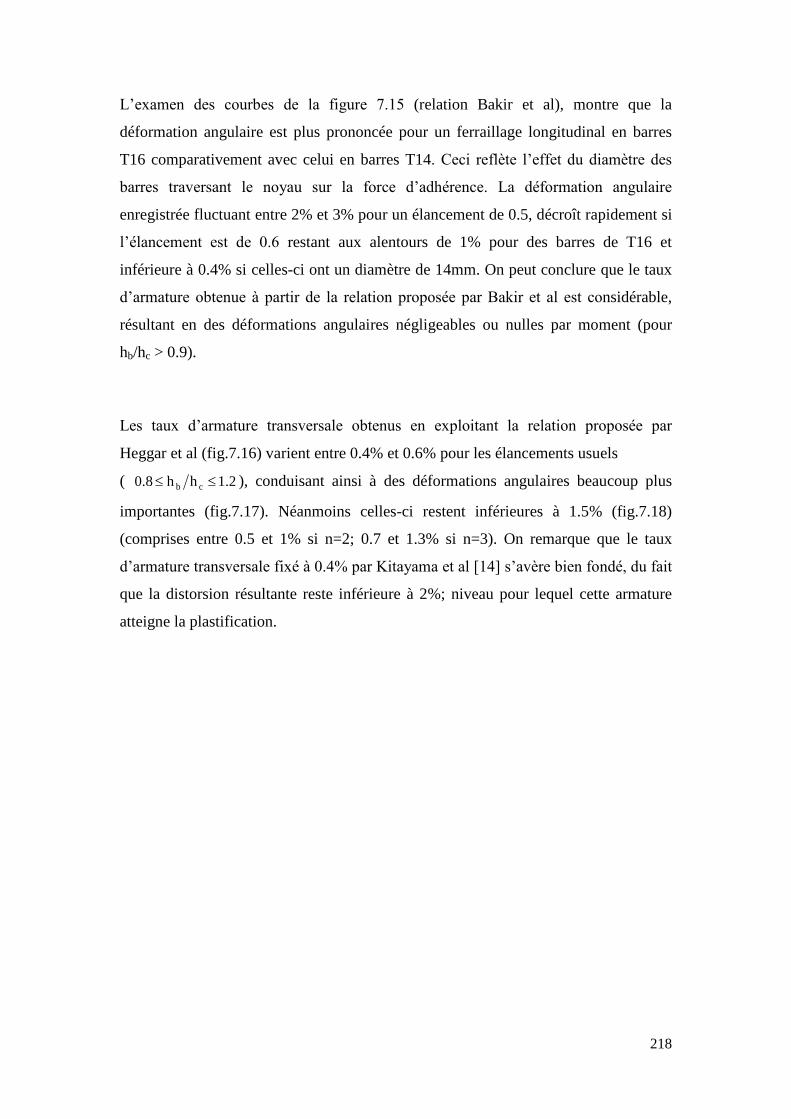
218
L’examen des courbes de la figure 7.15 (relation Bakir et al), montre que la
déformation angulaire est plus prononcée pour un ferraillage longitudinal en barres
T16 comparativement avec celui en barres T14. Ceci reflète l’effet du diamètre des
barres traversant le noyau sur la force d’adhérence. La déformation angulaire
enregistrée fluctuant entre 2% et 3% pour un élancement de 0.5, décroît rapidement si
l’élancement est de 0.6 restant aux alentours de 1% pour des barres de T16 et
inférieure à 0.4% si celles-ci ont un diamètre de 14mm. On peut conclure que le taux
d’armature obtenue à partir de la relation proposée par Bakir et al est considérable,
résultant en des déformations angulaires négligeables ou nulles par moment (pour
hb/hc > 0.9).
Les taux d’armature transversale obtenus en exploitant la relation proposée par
Heggar et al (fig.7.16) varient entre 0.4% et 0.6% pour les élancements usuels
( 2.1hh8.0 cb ), conduisant ainsi à des déformations angulaires beaucoup plus
importantes (fig.7.17). Néanmoins celles-ci restent inférieures à 1.5% (fig.7.18)
(comprises entre 0.5 et 1% si n=2; 0.7 et 1.3% si n=3). On remarque que le taux
d’armature transversale fixé à 0.4% par Kitayama et al [14] s’avère bien fondé, du fait
que la distorsion résultante reste inférieure à 2%; niveau pour lequel cette armature
atteigne la plastification.
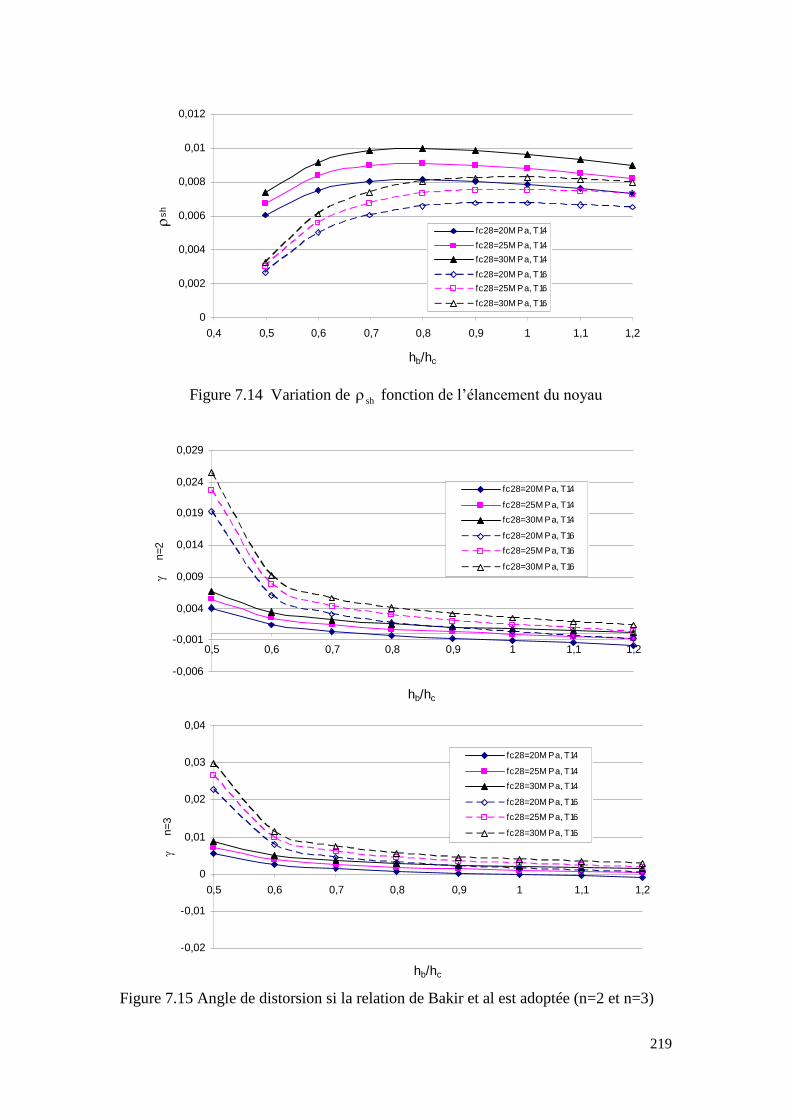
219
Figure 7.14 Variation de sh fonction de l’élancement du noyau
Figure 7.15 Angle de distorsion si la relation de Bakir et al est adoptée (n=2 et n=3)
0
0,002
0,004
0,006
0,008
0,01
0,012
0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2
hb/hc
ρsh
fc28=20M Pa, T14
fc28=25M Pa, T14
fc28=30M Pa, T14
fc28=20M Pa, T16
fc28=25M Pa, T16
fc28=30M Pa, T16
-0,006
-0,001
0,004
0,009
0,014
0,019
0,024
0,029
0,5 0,6 0,7 0,8 0,9 1 1,1 1,2
hb/hc
γn=
2
fc28=20M Pa, T14
fc28=25M Pa, T14
fc28=30M Pa, T14
fc28=20M Pa, T16
fc28=25M Pa, T16
fc28=30M Pa, T16
-0,02
-0,01
0
0,01
0,02
0,03
0,04
0,5 0,6 0,7 0,8 0,9 1 1,1 1,2
hb/hc
γn=
3
fc28=20M Pa, T14
fc28=25M Pa, T14
fc28=30M Pa, T14
fc28=20M Pa, T16
fc28=25M Pa, T16
fc28=30M Pa, T16
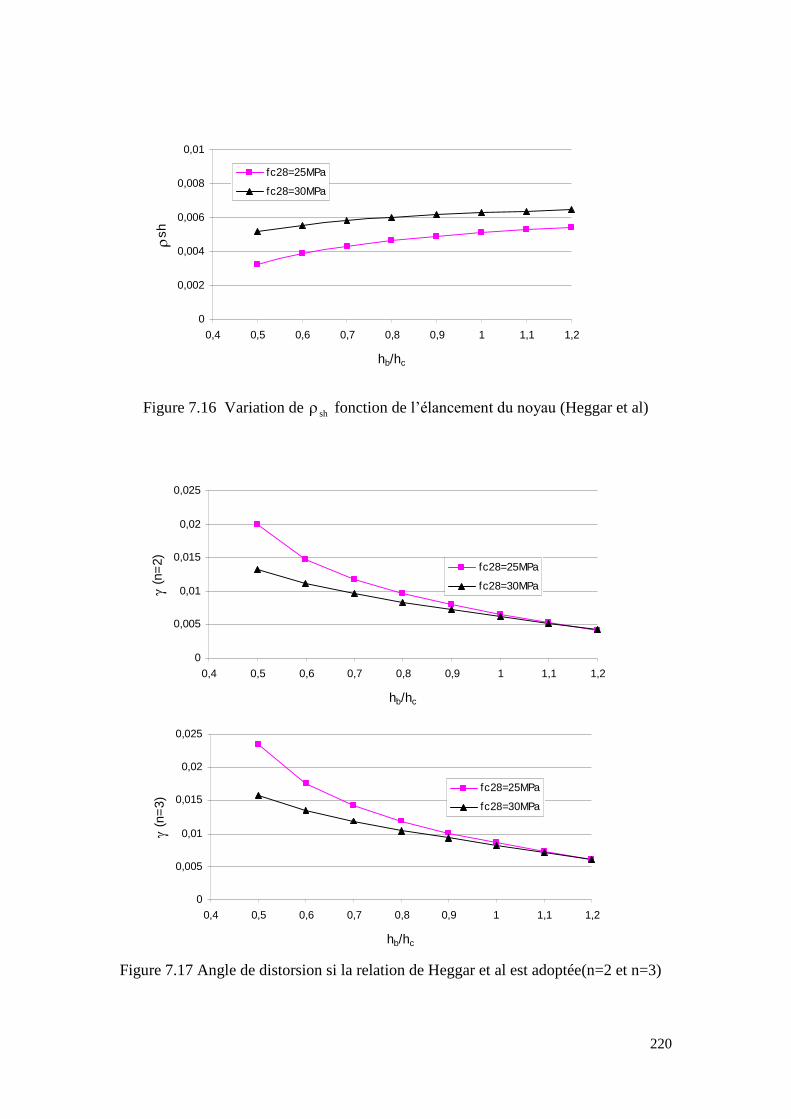
220
Figure 7.16 Variation de sh fonction de l’élancement du noyau(Heggar et al)
Figure 7.17 Angle de distorsion si la relation de Heggar et al est adoptée(n=2 et n=3)
0
0,002
0,004
0,006
0,008
0,01
0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2
hb/hc
ρsh
fc28=25MPa
fc28=30MPa
0
0,005
0,01
0,015
0,02
0,025
0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2
hb/hc
γ(n
=2) fc28=25MPa
fc28=30MPa
0
0,005
0,01
0,015
0,02
0,025
0,4 0,5 0,6 0,7 0,8 0,9 1 1,1 1,2
hb/hc
γ(n
=3)
fc28=25MPa
fc28=30MPa
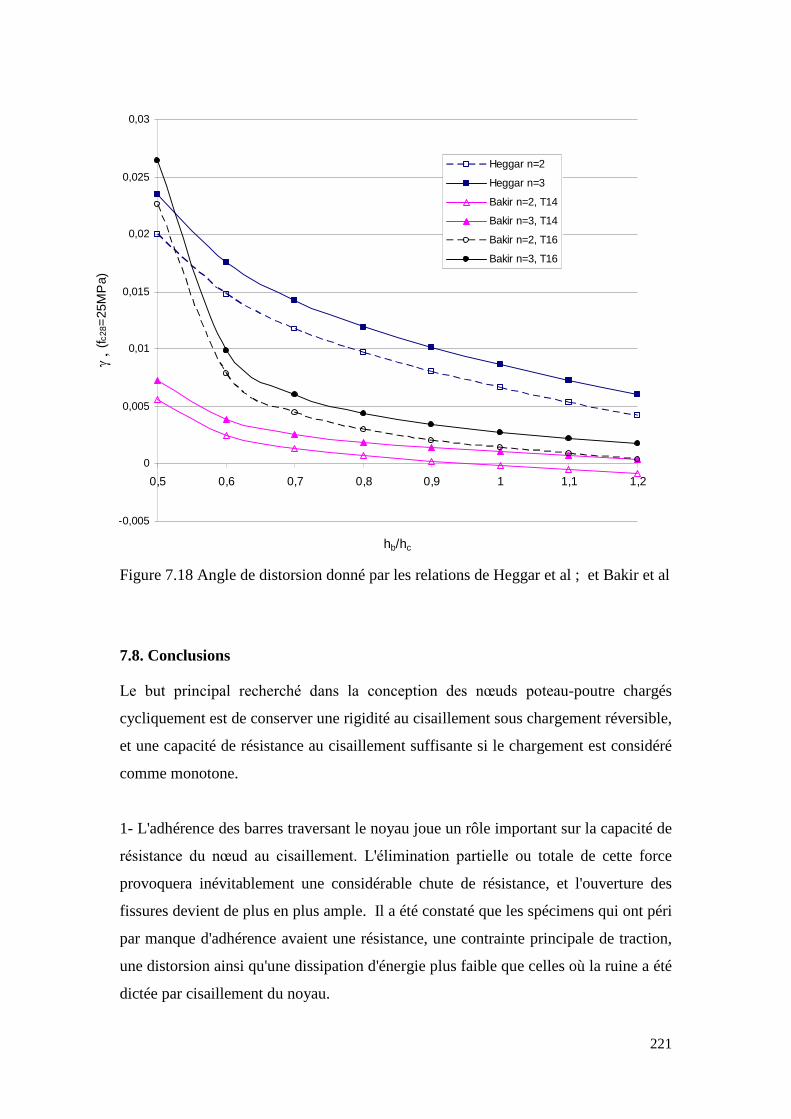
221
Figure 7.18 Angle de distorsion donné par les relations de Heggar et al ; et Bakir et al
7.8. Conclusions
Le but principal recherché dans la conception des nœuds poteau-poutre chargés
cycliquement est de conserver une rigidité au cisaillement sous chargement réversible,
et une capacité de résistance au cisaillement suffisante si le chargement est considéré
comme monotone.
1- L'adhérence des barres traversant le noyau joue un rôle important sur la capacité de
résistance du nœud au cisaillement. L'élimination partielle ou totale de cette force
provoquera inévitablement une considérable chute de résistance, et l'ouverture des
fissures devient de plus en plus ample. Il a été constaté que les spécimens qui ont péri
par manque d'adhérence avaient une résistance, une contrainte principale de traction,
une distorsion ainsi qu'une dissipation d'énergie plus faible que celles où la ruine a été
dictée par cisaillement du noyau.
-0,005
0
0,005
0,01
0,015
0,02
0,025
0,03
0,5 0,6 0,7 0,8 0,9 1 1,1 1,2
hb/hc
γ,(
f c28
=25
MP
a)
Heggar n=2
Heggar n=3
Bakir n=2, T14
Bakir n=3, T14
Bakir n=2, T16
Bakir n=3, T16
222
2- L'augmentation de la capacité d'adhérence augmentera donc la capacité de
résistance et de déformation du noyau, et il devient de ce fait impératif de limiter le
diamètre des barres longitudinales traversant le noyau.
3- La déformation principale de traction dans le noyau augmente avec l’augmentation
de l’élancement du noyau (hb/hc), le taux d’armature longitudinale du poteau scol
ainsi que de la charge qui lui revient. Cependant cette déformation est
défavorablement affectée par l’augmentation du taux d’armature longitudinale de la
poutre sb ainsi que du taux d’armature transversale du noyau sh ; en d’autres termes
l’augmentation de ces 2 paramètres améliore la capacité de résistance du noyau au
cisaillement.
4-Réduire l’élancement du noyauaugmentera la capacité de résistance de ce dernier.
Ceci contribuera aussi à satisfaire la condition poteau fort-poutre faible
(recommandée pour conditionner la plastification des poutres) en augmentant la
rigidité du poteau.
5- La densification de l’armature transversale à mi-hauteur du noyau, peut être plus
effective en fournissant une ductilité après fissuration, retardant ainsi la dégradation
de résistance des diagonales comprimées de béton.
6- Les déformations de l’acier transversal dans le noyau augmentent avec le
déplacement de niveau, donc avec la distorsion du noyau. Cette dernière affecte
directement la largeur des fissures, caractérisant de ce fait l’endommagement
structurel.Il serait donc judicieux de relier le taux de l’acier transversal dans le noyau
avec la limite sur la déformation angulaire afin de limiter le niveau
d’endommagement.
7- La formulation proposée reliant l’armature transversale du noyau à l’angle de
distorsion limite, s’accorde avec le dimensionnement en performances et
s’accommode avec la variation de l’élancement du noyau, les caractéristiques des
matériaux et du nombre de lits à disposer latéralement.
223
References
1- New Zealand Standard NZS, Code of Practice for General Structural Design, Standards
Association of New Zealand, 1992.
2- Building Code Requirements for Reinforced Concrete, ACI 318-89.
3- Eurocode 8 ( EC8 1995).
4- G.G.Penelis; A.J.Kappos 'Earthquake-Resistant Concrete Structures' Published by E&FN
Spon 1997.
5- R.Park, ‘Capacity Design of Ductile of RC Building Structures for Earthquake Resistance’
The Structural Engineer, Aug., 1992.
6- R.Park, T.Paulay, ‘Reinforced Concrete Structures’, J.Wiley, New-York, 1975.
7- M.Fintel, ‘Handbook of Concrete Engineering’, Second edition, 1985 Van Nostrand.
8- P.C.Cheung, T.Paulay, R.Park, ‘Behaviour of Beam-Column Joints in Seismically-Loaded
R.C Frames’, The Structural Engineer, April 1993.
9- J.H.Kim, J.B.Mander ‘Seismic detailing of reinforced concrete beam-column connections’
Structural Engineering & Mechanics Vol 10 N°6 (2000) 589-601
10- P.G.Bakir, H.M.Bodoruglu ‘Predicting the failure modes of monotonically loadedreinforced
concrete of exterior beam-column joints’ Structural Engineering & Mechanics Vol. 14 N°3
(2002) 307-330
11- P.G.Bakir, H.M.Bodoruglu ‘A new design equation for predicting the joint shear strength of
monotonically loaded exterior beam-column joints’ Engineering Structures 24 (2002) 1105-
1117
12- H. Shiohara 'Effects of Interaction Between Joint Shear and Bond Strength on the Elastic-
Plastic Behavior of R/C Beam-Column Joints'. Second US-Japan Workshop on Performance-
Based Earthquake Methodology for Reinforced Concrete Building Structures; 11-13
Sep.2000 Sapporo Hokkaido Japan. PEER 2000/10. pp 401-414
13- D.E.Lehman, W.G.Mosier, J.F.Stanton 'Seismic Performance of RC Beam-Column Joints'
Second US-Japan Workshop on Performance-Based Earthquake Methodology for Reinforced
Concrete Building Structures; 11-13 Sep.2000 Sapporo Hokkaido Japan. PEER 2000/10. pp
365-376
14- K.Kitayama, Y Tajima, M Okuda, S Kishida 'Influences of Beam and Column Bar Bond on
Failure Mechanism in Reinforced Concrete Interior Beam-Column Joints' Second US-Japan
Workshop on Performance-Based Earthquake Methodology for Reinforced Concrete
Building Structures; 11-13 Sep.2000 Sapporo Hokkaido Japan. PEER 2000/10. pp 357-364

224
15- M Teroaka, S Fujii 'Seismic Evaluation of R/C Beam-Column Joints' Second US-Japan
Workshop on Performance-Based Earthquake Methodology for Reinforced Concrete
Building Structures; 11-13 Sep.2000 Sapporo Hokkaido Japan. PEER 2000/10. pp 379-390
16. C.P.Pantelides, J.Hansen, J.Nadauld, L.D.Reaveley 'Assessment of RC Building Exterior
Joints with Substandard Details' PEER Report 2002/18
17- J.Heggar, A.Sherif & W.Roeser ‘Non seismic design beam column joints’ ACI Structural
Journal Sept-Oct 2003 Vol 100 N°5 654-664

225
8.1 Conclusions
Le but essentiel de cette thèse est de revoir la procédure de dimensionnement établie par le
code parasismique Algérien aux portiques autostables en béton armé, et fournir un complément
d’outils garantissant une meilleure sécurité, tout en introduisant la cohérence nécessaire dans la
réponse structurelle.
La philosophie de base dans la conception parasismique introduite dans le premier chapitre
souligne de nouveaux aspects tirés des derniers puissants tremblements de terre. Afin de
limiter les pertes économiques il devient nécessaire d'adopter une approche de
dimensionnement à plusieurs niveaux. Il a été trouvé par ailleurs que la conception à trois
niveaux de performance où la méthodologie de dimensionnement intéresse respectivement le
service, l'endommagement et l'ultime ou survie est la plus pratique. Pour aboutir à une
conception rationnelle on doit adopter à la limite une conception à deux niveaux de
performance à savoir le service et l'ultime.
La cohérence dans la stratégie du dimensionnement parasismique exige la vérification de la
rigidité de la structure pour le niveau de service, la résistance pour le niveau
d'endommagement et la ductilité pour le niveau ultime. Vu les différences importantes entre
séisme lointain et séisme proche du foyer épicentral, il devient aussi vital d'introduire l'effet
d'impulsion caractérisant le séisme proche dans le dimensionnement pratique.
Le code RPA99 spécifie inconsidérablement 2 niveaux de performance (art1.2):
- le premier relatif à un séisme modéré, relativement fréquent, exigeant une rigidité et une
résistance suffisante pour limiter les dommages structuraux et non structuraux.
- le second relatif à un séisme majeur, plus rare, exigeant une ductilité et une capacité de
dissipation d'énergie adéquate pour permettre à la structure de subir des déplacements
inélastiques avec dommages limités sans effondrement, ni perte de stabilité.
Cependant son examen révèle qu'il n'adopte principalement qu'une procédure de
dimensionnement à un seul niveau concernant l'état limite ultime (ELU) satisfaisant la
"sécurité de la vie" (à l'instar des codes basés sur la conception en force) car le premier niveau
est nullement reflété au sein de ses clauses réglementaires. Ceci implique que la structure peut
être endommagée mais ne doit pas s'effondrer. En plus de cela la boucle de contrôle sur la
capacité de déformation garantissant la dissipation d'énergie est carrément absente.
226
Dans le souci d'établir la cohérence nécessaire dans le processus de dimensionnement, il
devient impératif:
- de spécifier des critères de performance pour le niveau de service en recommandant des
valeurs appropriées pour le déplacement relatif par exemple.
- d'introduire pour le niveau ultime:
1- sur le plan du comportement structurel global
a- une nouvelle formulation pour le facteur de comportement en le reliant avec le niveau de
ductilité qui lui est concordant.
b- s'assurer du rapport des moments des poteaux sur ceux des poutres aboutissant au même
nœud, garantissant certes le mécanisme de rotulation des poutres.
2- sur le plan du comportement local:
a- la ductilité de section résultante du niveau de ductilité global établi; en adoptant une
nouvelle formulation du ferraillage transversal fonction de la flexibilité des poteaux, le
niveau d'endommagement et le déplacement relatif de niveau tolérable.
b- adopter une clause réglementaire pour les noyaux des nœuds (inexistante jusqu'à
présent) afin de se prémunir contre l'éventualité d'une ruine prématurée ou une migration
accidentelle des déformations plastiques.
3- réviser la limite sur la période élastique (si ce paramètre demeurera sélectionné comme
clivage de contrôle) fonction du niveau de ductilité de déplacement concordant avec le facteur
de comportement global.
Ce complément réglementaire s'avère nécessaire afin de hisser notre réglementation
parasismique en vigueur pour qu'elle puisse reposer réellement sur une conception à 2 niveaux
répondant ainsi au minimum requis.
227
Concernant le comportement global, on a besoin lors du dimensionnement préliminaire
d’évaluer la capacité de résistance latérale de la structure nécessaire pour limiter la demande
de ductilité de déplacement globale ainsi que la demande de déplacement global dans une
certaine limite, conduisant ainsi au contrôle local de la ductilité de niveau et du déplacement
relatif entre niveaux. Si le spectre de dimensionnement élastique est spécifié pour chaque
niveau de performance, le facteur R permettra alors l’estimation de capacité de résistance
requise particulièrement pour les niveaux de performance vie sauve, pré ruine et ruine.
L’implantation du facteur R dans la conception en performances nécessite la spécification des
demandes max tolérables de ductilité de niveau ainsi que du déplacement relatif d’étage pour
chaque système structurel et niveau de performance
Cette étude a permis de faire ressortir les points suivants :
Elargir le spectre de ductilité afin de répondre à une grande variété de structures.
En spécifiant des valeurs pour le facteur de comportement indépendamment de la période et du
niveau de ductilité le code Algérien s'est mis dans le côté non conservateur pour les structures
appartenant aux plages de périodes courtes et intermédiaires où la force de calcul sera
inévitablement sous estimée.
Le code RPA introduit l’effet de redondance, tout en faisant abstraction à la réserve de
résistance et aux effets P
Si le facteur de réserve de résistance reste sans effet sur le dimensionnement car le facteur R
établi par le code ne concerne que le niveau de ductilité,l’effet P peut conduire à une sous
estimation importante de l’effort tranchant de base.
Il reste encore nécessaire d’adapter le coefficient R pour prendre en considération les degrés de
liberté multiples.
Il devient nécessaire d’établirune formulation incluant la demande de ductilité, la réserve de
résistance, la redondance structurelle, MDOF et l’effet P . Le but de cette formulation est
de fournir une base technique pour les valeurs à attribuer au coefficient de comportement R.
228
La procédure d’évaluation de la période proposée dans le troisième chapitre pourra servir
d’outil de contrôle sur le comportement global, en garantissant une capacité de résistance
minimale requise, concordante avec un niveau de déformation tolérable nécessaire pour le
contrôle de l’endommagement structurel. La possibilité d’ajustement des niveaux de
performance est introduite en guise de flexibilité permettant au concepteur de se prémunir au
préalable contre un éventuel dépassement d’une capacité de déformation. Cette alternative
contribuera inévitablement à l’amélioration de la sécurité tout en limitant l’endommagement
résultant. L'étude a porté sur trois cas de structures en portiques autostables tout en
considérant la spécifité du sol d'assise. Considérant les différents résultats obtenus, on peut
constater que la limite préconisée par le code Algérien nitelim T30.1T ne s'accorde que pour
les structures nues; car si le remplissage est en maçonnerie rigide cette limite s'avère très
restrictive.
Pour assurer le niveau de sécurité recherché caractérisé par une certaine demande de ductilité,
le dimensionnement des zones dissipatives d’énergie dans les portiques autostables nécessite
une attention particulière afin d’éviter la ruine par cisaillement et favoriser le développement
du mécanisme de ruine préétabli. Ceci n’est possible qu’à travers un taux d’armature
transversale adéquatement disposée sur une longueur potentiellement affectée par la rotulation
plastique. Plusieurs facteurs ayant une incidence directe sur ce taux ont été recensés de part le
monde, parmi lesquels le confinement du béton a été dégagé comme étant le paramètre
déterminant.
Sachant que le confinement a une incidence favorable sur la performance du béton en
améliorant sa résistance et sa ductilité; un modèle approprié pour l’analyse du comportement
moment - courbure des sections s’avère nécessaire afin de prédire fidèlement la capacité de
ductilité de courbure. Il en ressort des différents travaux de recherche réalisés que les
paramètres suivants affectent positivement le confinement, notamment:
- l’espacement adéquat de l’armature transversale
- l’augmentation du rapport volumétrique et de la contrainte élastique de l’acier
transversal
- configuration convenable de l’armature longitudinale autour du périmètre de la section
.
229
Cependant la longueur de confinement est influencée par :
- le niveau de ductilité de courbure,
- l’intensité de l’effort normal,
- le degré ou indice de confinement du béton.
Le RPA doit introduire dans ses prescriptions actuelles la notion de longueur plastique et
spécifier l’étendue de la longueur de confinement pour différentes classes de ductilité.
L’examendu RPA permet de constater que la ductilité locale des éléments linéaires (poteaux
et poutres), n’a pas bénéficié de recommandations appropriées pouvant leur garantir
fidèlement le comportement escompté, du moment que la boucle de contrôle sur la
déformation au niveau des zones dissipatives d'énergie est carrément inexistante. Cette
procédure a été simplifiée par des limitessur les taux d’armatures longitudinales et
transversales ainsi que leur espacement au sein des zones dissipatives d'énergie, conduisant le
plus souvent à conférer un comportement moyennement ductile. Faute d'outils le concepteur
est dans l'impossibilité d'apprécier le niveau de ductilité local ou de pouvoir le contrôler afin
d'établir la corrélation nécessaire entre comportement global, local de la structure. Cette
corrélation est l'alternative de cohérence garantissant un comportement structurel homogène.
Le travail entrepris dans le sixième chapitre a porté principalement sur la proposition d’outils
permettant le contrôle sur la déformation locale tout en s’accordant avec l’idée de capacité de
déformation d’ensemble, afin de hisser la procédure de dimensionnement actuelle vers une
conception à 2 niveaux de performance. En considérant les éléments verticaux, le niveau
d’endommagement structurel a été introduit élargissant ainsi cette alternative à englober un
partiellement (car c’est uniquement l’ELU qui est considéré) un troisième niveau de
performance.
Le travail présenté dans la première partie de ce chapitre a été consacré aux poteaux, prend en
considération un déplacement relatif d’étage limite et un niveau d'endommagement modéré
garantissant aussi bien la sécurité des vies humaines que l'intégrité structurelle avec une
éventuelle réparation non onéreuse, a été conduit dans l'esprit de palier au vide réglementaire
relatif à l'estimation de la vulnérabilité sismique des portiques autostables en béton armé. Des
expressions ont été proposées reliant le rapport volumétrique de l'armature transversale ( sh ),
230
l’effort normal réduit ( 0NN ) et la flexibilité des poteaux ( iL ) selon la classe de ductilité et
le niveau d’endommagement souhaité. Ces expressions permettent d’introduire un taux
d’armature ajustable pour les différentspoteaux en prenant en considération une descente de
charge différente ainsi qu’un déplacement de niveau constant conduisant à une meilleure
cohérence du comportement global. Cette alternative permet le contrôle sur la déformation
locale tout en s’accordant d’une part avec l’idée de capacité de déformation d’ensemble par
rapport à un niveau d’endommagement désiré; et d’autre part avec l’approche de
dimensionnement parasismique en performances. Ainsi on pourra alors parler de capacité de
déformation de niveau à l’instar d’un déplacement de niveau. Les résultats obtenus ont
également permis de délimiter le coffrage des poteaux fonction du niveau d’endommagement
recherché et ont montré que le déplacement relatif de niveau à observer tel que recommandé
par le code RPA99 doit être réduit afin d’éviter une éventuelle perte de stabilité structurelle
résultante d’un endommagement excessif.
Les poutres sont les éléments structuraux où la grande proportion de l’énergie de dissipation
prend place à travers un mécanisme flexionnel de rotules plastiques. Ceci ne sera atteint qu’à
travers une conception et un dimensionnement conduisant à des sections exhibant un
comportement suffisamment ductile. L’étude entreprise dans la seconde partie du cinquième
chapitre, a été consacrée à la ductilité des poutres, et a permis de dégager les points suivants :
1. La capacité de déformation décroît avec l’augmentation du taux d’acier tendu et augmente
avec l’augmentation du taux d’acier comprimé donc avec le rapport'
.
2. Le confinement du béton améliore la résistance du béton et la capacité de déformation des
sections ce qui permettra la réduction du taux d’armature comprimée. Le fait de ne pas le
prendre en compte sert à limiter l’endommagement structurel lors d’un séisme sévère.
3. Lorsque le confinement du béton est négligé, la borne supérieure préconisée par le code
algérien est jugée trop excessive, conduisant à des sections faiblement ductiles ne favorisant
pas le développement flexionnel privilégié (rotulation des poutres) ; ceci entraînera une
migration des rotules plastiques aux sections des têtes de poteaux résultant en la formation
du mécanisme d’étage.
231
4. La limitation de max préconisée par l’EC8 pour la classe de ductilité ‘M’est loin de pouvoir
garantir ce niveau de performance et doit être de ce fait réduite. Ceci montre que la
formulation articulée uniquement sur les caractéristiques des matériaux et le rapport du taux
d’armature comprimée sur celui de l’armature tendue reste limitée.
Il en ressort donc que la formulation proposée unifiant les différents facteurs influant la
ductilité locale est plus adaptée pour choisir le taux d’armature tendue nécessaire à corréler
avec le taux d’armature comprimée, afin de garantirou de contrôler le niveau de performance
recherché. Elle sera de ce fait recommandée comme outil de contrôle dans une procédure de
dimensionnement en performances.
Les expressions proposées pour la détermination de l’armature transversale nécessaire pour
contrôler la demande de ductilité locale des éléments linéaires, permettent à défaut d’une
procédure incluant un modèle de confinement; d’assurer la sécurité nécessaire en garantissant
des capacités de déformation adéquates conduisant à une meilleure cohérence du
comportement global.
Généralement, l’approche la plus recommandable dans la conception des portiques
autostables, est celle qui entraîne la formation des rotules plastiques au niveau des poutres. La
stabilité des portiques est généralement assurée par l'encastrement réciproque des éléments
linéaires poutres et poteaux au droit des nœuds et donc par la mise en flexion de ces éléments.
La concentration des efforts au droit des nœuds requière une certaine capacité nécessaire pour
que ces derniers assurent le comportement escompté à travers une transmission effective des
efforts résultants. L'expérience a montré qu'en cas de séisme, les nœuds sont les parties les
plus vulnérables de l'ossature, pour ce, il est essentiel de vérifier leur capacité de résistance
vis à vis de l'effort tranchant ainsi que les conditions de scellement des barres traversant la
région nodale. L'exigence fondamentale pour qu'une structure en béton armé soit apte à
développer sa capacité de résistance maximale est d'éviter une rupture prématurée de ses
noeuds.
Le but principal recherché dans la conception des nœuds poteau-poutre chargés cycliquement
est de conserver une rigidité au cisaillement sous chargement réversible, et une capacité de
résistance au cisaillement suffisante si le chargement est considéré comme monotone.
232
1- L'adhérence des barres traversant le noyau joue un rôle important sur la capacité de
résistance du nœud au cisaillement. L'élimination partielle ou totale de cette force provoquera
inévitablement une considérable chute de résistance, et l'ouverture des fissures devient de plus
en plus ample. Il a été constaté que les spécimens qui ont péri par manque d'adhérence
avaient une résistance, une contrainte principale de traction, une distorsion ainsi qu'une
dissipation d'énergie plus faible que celles où la ruine a été dictée par cisaillement du noyau.
2- L'augmentation de la capacité d'adhérence augmentera donc la capacité de résistance et de
déformation du noyau, et il devient de ce fait impératif de limiter le diamètre des barres
longitudinales traversant le noyau.
3- La déformation principale de traction dans le noyau augmente avec l’augmentation de
l’élancement du noyau (hb/hc), le taux d’armature longitudinale du poteau scol ainsi que de la
charge qui lui revient. Cependant cette déformation est défavorablement affectée par
l’augmentation du taux d’armature longitudinale de la poutre sb ainsi que du taux d’armature
transversale du noyau sh ; en d’autres termes l’augmentation de ces 2 paramètres améliore la
capacité de résistance du noyau au cisaillement.
4- Réduire l’élancement du noyauaugmentera la capacité de résistance de ce dernier. Ceci
contribuera aussi à satisfaire la condition poteau fort-poutre faible (recommandée pour
conditionner la plastification des poutres) en augmentant la rigidité du poteau.
5- La densification de l’armature transversale à mi-hauteur du noyau, peut être plus effective
en fournissant une ductilité après fissuration, retardant ainsi la dégradation de résistance des
diagonales comprimées de béton.
6- Les déformations de l’acier transversal dans le noyau augmentent avec le déplacement de
niveau, donc avec la distorsion du noyau. Cette dernière affecte directement la largeur des
fissures, caractérisant de ce fait l’endommagement structurel. Il serait donc judicieux de relier
le taux de l’acier transversal dans le noyau avec la limite sur la déformation angulaire afin de
limiter le niveau d’endommagement.

233
7- La formulation proposée reliant l’armature transversale du noyau à l’angle de distorsion
limite, s’accorde avec le dimensionnement en performances et s’accommode avec la variation
de l’élancement du noyau, les caractéristiques des matériaux et du nombre de lits àdisposer
latéralement.
8.2 Recommandations
Afin d’affermir la procédure de dimensionnement en performances il serait nécessaire :
1- d’améliorer la fiabilité des valeurs attribuées à R pour différents systèmes structurels, en
caractérisantl’interdépendance des facteurs de ductilité, de résistance et de redondance.
Les facteurs de ductilité et de résistance doivent être évalués pour chaque type de système
structurel et ce pour chaque zone sismique utilisant les définitions standardisées de la ductilité
et de la résistance.
2- de revoir le coefficient de majoration des moments fléchissants ultimes dans les poteaux
par rapport à ceux des poutres; favorisant le développement du mécanisme de ruine lié à la
formation de rotules plastiques; à travers l’évaluation de la réserve de résistance au sein des
portiques et la séquence de rotulation plastique.
3- élargir l’étude de ce coefficient en prenant en compte de la contribution de la largeur
effective de la dalle de compression, et la maçonnerie rigide.





























