Embed Size (px)
Citation preview

MTMTMTMT----SUPSUPSUPSUP----XXXXXXXXXXXX
REV00REV00REV00REV00
FFFF----RPRPRPRP----CUPCUPCUPCUP----17/REV:0017/REV:0017/REV:0017/REV:00
MMMMMMMMAAAAAAAANNNNNNNNUUUUUUUUAAAAAAAALLLLLLLL DDDDDDDDEEEEEEEE LLLLLLLLAAAAAAAA AAAAAAAASSSSSSSSIIIIIIIIGGGGGGGGNNNNNNNNAAAAAAAATTTTTTTTUUUUUUUURRRRRRRRAAAAAAAA
MODELADO Y SIMULACIÓN DE SISTEMAS
INGENIERÍA MECATRÓNICA

DIRECTORIODIRECTORIODIRECTORIODIRECTORIO
Secretario de Educación PúblicaSecretario de Educación PúblicaSecretario de Educación PúblicaSecretario de Educación Pública
Dr. Reyes Taméz Guerra
Subsecretario de Educación SuperiorSubsecretario de Educación SuperiorSubsecretario de Educación SuperiorSubsecretario de Educación Superior Dr. Julio Rubio Oca Coordinador de Universidades PolitécnicasCoordinador de Universidades PolitécnicasCoordinador de Universidades PolitécnicasCoordinador de Universidades Politécnicas
Dr. Enrique Fernández Fassnacht

PAGINA LEGALPAGINA LEGALPAGINA LEGALPAGINA LEGAL
Carlos Alejandro de Luna Ortega – (Universidad Politécnica de Aguascalientes) Primera Edición: 2006 DR 2005 Secretaría de Educación Pública México, D.F. ISBN-----------------

ÍNDICEÍNDICEÍNDICEÍNDICE
INTRODUCCIÓN -------------------------------------------------------------------------------- 1
FICHA TÉCNICA --------------------------------------------------------------------------------- 2
IDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJE -------------------- 4
PLANEACIÓN DEL APRENDIZAJE ----------------------------------------------------- 6
LINEAMIENTOS DE EVALUACIÓN -------------------------------------------------- 10
DESARROLLO DE PRÁCTICA ---------------------------------------------------------- 11
INSTRUMENTOS DE EVALUACIÓN ------------------------------------------------- 16
GLOSARIO --------------------------------------------------------------------------------------- 30
BIBLIOGRAFÍA --------------------------------------------------------------------------------- 32

1
INTRODUCCIÓNINTRODUCCIÓNINTRODUCCIÓNINTRODUCCIÓN
Esta asignatura contribuye con los conocimientos y habilidades del estudiante
de ingeniería mecatrónica para el modelado y simulación de sistemas
dinámicos. Así como posibilita al estudiante a tener nuevas herramientas para
un estudio mas profundo en un futuro.
El modelado de sistemas dinámicos es de extrema importancia para el
ingeniero en mecatrónica dado que es lo primero que tiene que realizar para
poder desarrollar un buen control de cualquier sistema dinámico. En la
actualidad es necesario tener un buen conocimiento de esta materia ya que lo
que se busca en el ámbito de la ingeniería mecatrónica es la automatización de
procesos.
En esta asignatura el alumno modelará diversos sistemas dinámicos, ejemplos
ilustrativos que describen sistemas realistas y complejos de ingeniería,
empleando las leyes físicas que gobiernan un sistema determinado, como las
leyes de Newton para sistemas mecánicos y las leyes de Kirchhoff para
sistemas eléctricos. Además, en este curso se da una breve introducción para
que el alumno pueda hacer analogías entre sistemas para posteriormente
diseñar un computador electrónico analógico que represente dicho sistema
para su simulación y análisis.
Para analizar el comportamiento de sistemas se simularan las ecuaciones
dinámicas utilizando paquetes de cómputo, tales como: MATLAB, Simulink,
Simnon, etc.
Esta asignatura contribuye con sus conocimientos y habilidades a varias de las
materias posteriores tales como: Control Clásico, Control Digital, Robótica I y II,
Diseño Mecatrónico I y II,. Además, contribuye al perfil de egreso al
proporcionar las bases para el diseño de sistemas mecatrónicos.

FICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICA
Nombre: MODELADO Y SIMULACIÓN DE SISTEMAS
Clave:
Justificación:
En esta asignatura el alumno modelará diversos sistemas dinámicos, empleando las leyes físicas que gobiernan un sistema determinado. Además, se realizan analogías entre sistemas para posteriormente comparar su comportamiento físico con la simulación para su análisis.
Objetivo: Desarrollar la capacidad en el alumno para analizar el comportamiento de sistemas dinámicos a través de su representación matemática y su simulación numérica empleando herramientas de cómputo.
Pre requisitos:
• Análisis de Ecuaciones diferenciales • Simulación en software • Programación • Física, Química y Electrónica Analógica
Capacidades y/o Habilidades
• Definir conceptos básicos y la terminología asociada con el modelado y simulación de sistemas físicos. • Representar ecuaciones diferenciales en modelos matemáticos de entrada-salida y en espacio de estado. • Obtener soluciones analíticas de modelos matemáticos. • Modelar sistemas físicos: Mecánicos, eléctricos, electromecánicos, hidráulicos y térmicos. • Analizar la respuesta dinámica de sistemas dinámicos. • Simular el modelo matemático de sistemas físicos con el uso de paquetes de simulación. • Realizar analogías entre sistemas. • Simular sistemas físicos mediante computadoras analógicas.
Estimación de tiempo (horas) necesario para transmitir el aprendizaje al alumno, por Unidad de Aprendizaje:
UNIDADES DE APRENDIZAJE TEORÍA PRÁCTICA
presencial
No presencial
presencial
No presencial
Introducción al modelado y simulación
9 2 0 0
Modelos matemáticos y soluciones analíticas
11 2 0 0
Modelado de sistemas físicos
15 2 10 1
Simulación de sistemas físicos
15 2 10 1
FICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICAFICHA TÉCNICA

Principios básicos del computador analógico
10 2 10 3
Total de horas por cuatrimestre:
105
Total de horas por semana: 6 Créditos: 6
Bibliografía:
1. Bolton, W. Mecatrónica. Sistemas de control electrónico en Mecatrónica. Sistemas de control electrónico en Mecatrónica. Sistemas de control electrónico en Mecatrónica. Sistemas de control electrónico en ingenieríaingenieríaingenieríaingeniería mecánica y eléctrica.mecánica y eléctrica.mecánica y eléctrica.mecánica y eléctrica. Segunda Ed. Alfaomega.
2. Shearer, J. Lowen y Kulakowski, Bohdan T., Dynamic Modeling and
Control of Engineering Systems, Segunda Edición.
3. Eronini, Umez-Eronini, Dinámica de Sistemas y Control, Dinámica de Sistemas y Control, Dinámica de Sistemas y Control, Dinámica de Sistemas y Control, Primera Edición, Thomson, México.
4. Ogata, Katsuhiko, Ingeniería de Control ModernaIngeniería de Control ModernaIngeniería de Control ModernaIngeniería de Control Moderna, Cuarta Edición,
Prentice Hall, México.
5. Lewis H. Paul y Yang Chang, Sistemas de Control en IngenieríaSistemas de Control en IngenieríaSistemas de Control en IngenieríaSistemas de Control en Ingeniería, Primera Edición, Prentice Hall.
6. Flinn y Trojan, Materiales de Ingeniería y sus AplicacionesMateriales de Ingeniería y sus AplicacionesMateriales de Ingeniería y sus AplicacionesMateriales de Ingeniería y sus Aplicaciones, Tercera
edición, Mc Graw Hill..
7. Ogata, Katsuhiko, Problemas de Ingeniería de Control Utilizando Problemas de Ingeniería de Control Utilizando Problemas de Ingeniería de Control Utilizando Problemas de Ingeniería de Control Utilizando MatlabMatlabMatlabMatlab, Primera Edición, Prentice Hall.
8. McGill, David J. y King, Wilton W., Mecánica para Ingeniería y sus
Aplicaciones, Primera Edición, Grupo Editorial Iberoamericana, México.
9. Nise. Sistemas de control para ingeniería. Editorial Patria Cultural.
México

IDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJEIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJEIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJEIDENTIFICACIÓN DE RESULTADOS DE APRENDIZAJE
Unidades de Unidades de Unidades de Unidades de AprendizajeAprendizajeAprendizajeAprendizaje
Resultados de Resultados de Resultados de Resultados de Aprendizaje Aprendizaje Aprendizaje Aprendizaje
CriterCriterCriterCriterios de Desempeño ios de Desempeño ios de Desempeño ios de Desempeño La persona es competente cuando:La persona es competente cuando:La persona es competente cuando:La persona es competente cuando:
Evidencias Evidencias Evidencias Evidencias
(EC, EP, ED, EA)(EC, EP, ED, EA)(EC, EP, ED, EA)(EC, EP, ED, EA)
TotalTotalTotalTotal
Hrs.Hrs.Hrs.Hrs.
Introducción al Modelado y Simulación
El alumno define conceptos básicos del modelado y simulación
Define y clasifica los sistemas mecánicos, eléctricos y mecatrónicos, así como realiza los primeros bosquejos de modelado de un sistema.
EC: Definición modelo y sistema, Clasificación de modelos, procedimiento de modelar y simular, criterios para la simulación EP: Entrega reporte de investigación.
6
Modelos matemáticos y soluciones analíticas
El alumno representa ecuaciones
diferenciales en modelos
matemáticos de entrada-salida y de espacio de
estados
Encuentra la solución y representa las ecuaciones diferenciales de cualquier sistema en un modelo matemático de entrada y salida y de espacio de estados, así como obtiene su función de transferencia y su gráfica de respuesta.
EC: Clasificación de modelos de sistema, modelos de entrada-salida, Modelos en el espacio de estados, transición entre modelos de entrada-salida y espacio de estados. EP: Representa modelos en el espacio de estados y de entrada-salida en software de simulación, convierte un modelo de espacio de estados en modelo de entrada y salida y viceversa.
10
El alumno obtiene la solución analítica de
modelos matemáticos
EC: Ecuaciones diferenciales de primer orden, de segundo orden, y de orden superior. EP: Identifica respuesta libre y forzada,; respuesta amortiguada, subamortiguada y críticamente amortiguada
IDENTIFICACION DE RESULTADOS DE APRENDIZAJEIDENTIFICACION DE RESULTADOS DE APRENDIZAJEIDENTIFICACION DE RESULTADOS DE APRENDIZAJEIDENTIFICACION DE RESULTADOS DE APRENDIZAJE
Unidades de Unidades de Unidades de Unidades de AprendizajeAprendizajeAprendizajeAprendizaje
Resultados de Resultados de Resultados de Resultados de Aprendizaje Aprendizaje Aprendizaje Aprendizaje
CriterCriterCriterCriterios de Desempeño ios de Desempeño ios de Desempeño ios de Desempeño La persona es competente cuando:La persona es competente cuando:La persona es competente cuando:La persona es competente cuando:
Evidencias Evidencias Evidencias Evidencias
(EC, EP, ED, EA)(EC, EP, ED, EA)(EC, EP, ED, EA)(EC, EP, ED, EA)
TotalTotalTotalTotal
Hrs.Hrs.Hrs.Hrs.
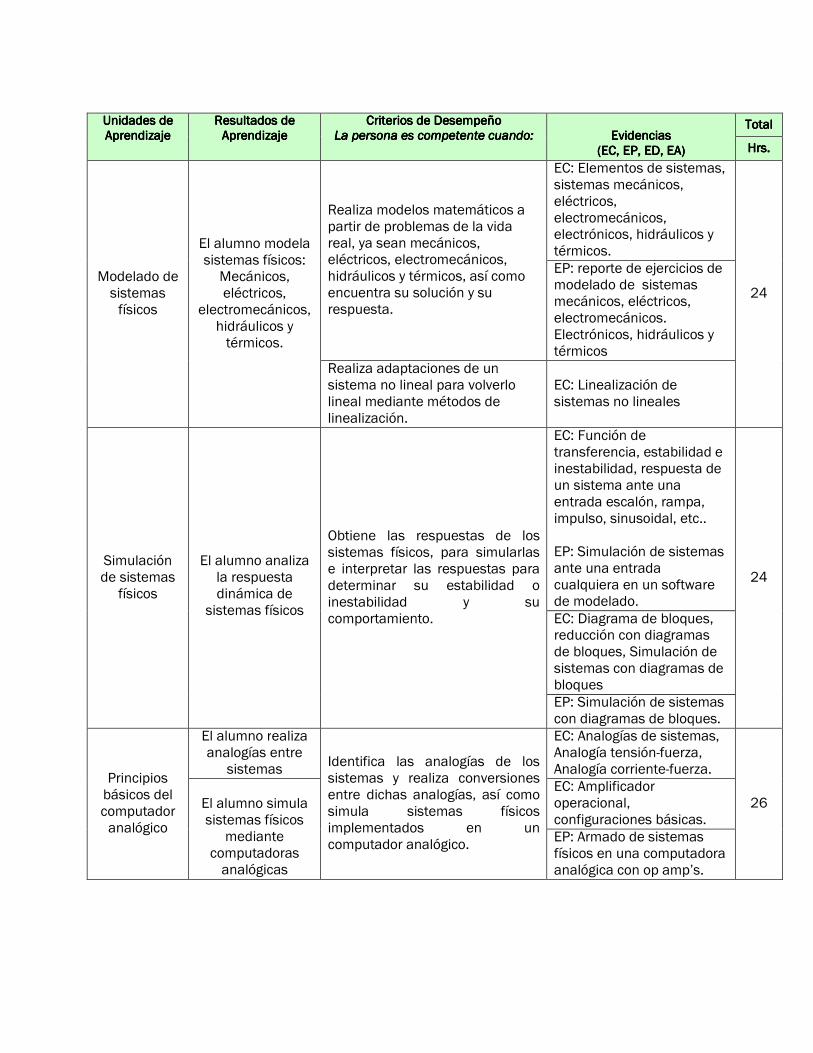
Modelado de sistemas físicos
El alumno modela sistemas físicos:
Mecánicos, eléctricos,
electromecánicos, hidráulicos y
térmicos.
Realiza modelos matemáticos a partir de problemas de la vida real, ya sean mecánicos, eléctricos, electromecánicos, hidráulicos y térmicos, así como encuentra su solución y su respuesta.
EC: Elementos de sistemas, sistemas mecánicos, eléctricos, electromecánicos, electrónicos, hidráulicos y térmicos.
24
EP: reporte de ejercicios de modelado de sistemas mecánicos, eléctricos, electromecánicos. Electrónicos, hidráulicos y térmicos
Realiza adaptaciones de un sistema no lineal para volverlo lineal mediante métodos de linealización.
EC: Linealización de sistemas no lineales
Simulación de sistemas
físicos
El alumno analiza
la respuesta dinámica de
sistemas físicos
Obtiene las respuestas de los sistemas físicos, para simularlas e interpretar las respuestas para determinar su estabilidad o inestabilidad y su comportamiento.
EC: Función de transferencia, estabilidad e inestabilidad, respuesta de un sistema ante una entrada escalón, rampa, impulso, sinusoidal, etc.. EP: Simulación de sistemas ante una entrada cualquiera en un software de modelado.
24
EC: Diagrama de bloques, reducción con diagramas de bloques, Simulación de sistemas con diagramas de bloques EP: Simulación de sistemas con diagramas de bloques.
Principios básicos del computador analógico
El alumno realiza analogías entre
sistemas Identifica las analogías de los sistemas y realiza conversiones entre dichas analogías, así como simula sistemas físicos implementados en un computador analógico.
EC: Analogías de sistemas, Analogía tensión-fuerza, Analogía corriente-fuerza.
26
El alumno simula sistemas físicos
mediante computadoras
analógicas
EC: Amplificador operacional, configuraciones básicas. EP: Armado de sistemas físicos en una computadora analógica con op amp’s.

6
PLANEACIÓN DEL APRENDIZAJEPLANEACIÓN DEL APRENDIZAJEPLANEACIÓN DEL APRENDIZAJEPLANEACIÓN DEL APRENDIZAJE
Resultados de Aprendizaje
Criterios de Desempeño
Evidencias (EP, ED, EC, EA)
Instrumento de evaluación.
Técnicas de aprendizaje
Espacio educativo Total de horas
Teoría Práctica
Aula Lab. otro HP HNP HP HNP
El alumno define conceptos básicos del modelado y simulación
Define y clasifica los sistemas mecánicos, eléctricos y mecatrónicos, así como realiza los primeros bosquejos de modelado de un sistema.
EC: Definición modelo y sistema, Clasificación de modelos, procedimiento de modelar y simular, criterios para la simulación
Cuestionario Lista de Cotejo
Exposición del Profesor
Exposición del alumno
Discusión en grupos
Lluvia de Ideas
X 4 2 0 0
EP: Entrega reporte de investigación sobre modelos.
El alumno representa ecuaciones
diferenciales en modelos
matemáticos de entrada-salida y de
espacio de
Encuentra la solución y representa las ecuaciones diferenciales de cualquier sistema en un modelo matemático de entrada y salida y de espacio de estados, así como obtiene su función de transferencia y su gráfica
EC: Clasificación de modelos de sistema, modelos de entrada-salida, Modelos en el espacio de estados, transición entre modelos de entrada-salida y espacio de estados.
Cuestionario
Exposición del profesor
Resolución de ejercicios
X 2 0 0 0
PLANEACIÓN DEL APRENDIZAJE PLANEACIÓN DEL APRENDIZAJE PLANEACIÓN DEL APRENDIZAJE PLANEACIÓN DEL APRENDIZAJE

7
Resultados de Aprendizaje
Criterios de Desempeño
Evidencias (EP, ED, EC, EA)
Instrumento de evaluación.
Técnicas de aprendizaje
Espacio educativo Total de horas
Teoría Práctica
Aula Lab. otro HP HNP HP HNP
estados de respuesta. EP: Representa modelos en el espacio de estados y de entrada-salida en software de simulación, convierte un modelo de espacio de estados en modelo de entrada y salida y viceversa.
Lista de cotejo
X 3 0 0 0
El alumno obtiene la solución analítica de
modelos matemáticos
EC: Ecuaciones diferenciales de primer orden, de segundo orden, y de orden superior.. Cuestionario
Lista de cotejo
Exposición del profesor
Exposición del alumno
Resolución de ejercicios
X X 3 2 0 0 EP: Identifica respuesta libre y forzada,; respuesta amortiguada, subamortiguada y críticamente amortiguada
El alumno modela sistemas físicos:
Mecánicos, eléctricos,
electromecánicos, hidráulicos y
Realiza modelos matemáticos a partir de problemas de la vida real, ya sean mecánicos, eléctricos, electromecánicos, hidráulicos y térmicos, así como encuentra su solución y
EC: Elementos de sistemas, sistemas mecánicos, eléctricos, electromecánicos, electrónicos, hidráulicos y térmicos.
Cuestionario
Exposición Lluvia de
Ideas Investigación
X 7 1 0 0

8
Resultados de Aprendizaje
Criterios de Desempeño
Evidencias (EP, ED, EC, EA)
Instrumento de evaluación.
Técnicas de aprendizaje
Espacio educativo Total de horas
Teoría Práctica
Aula Lab. otro HP HNP HP HNP
térmicos.
su respuesta. EP: reporte de ejercicios de modelado de sistemas mecánicos, eléctricos, electromecánicos. Electrónicos, hidráulicos y térmicos
Lista de cotejo
Práctica mediante la
acción X 0 0 10 1
Realiza adaptaciones de un sistema no lineal para volverlo lineal mediante métodos de linealización.
EC: Linealización de sistemas no lineales
Cuestionario Exposición
Resolución de ejercicios
X 4 1 0 0
El alumno analiza la respuesta dinámica de sistemas físicos
Obtiene las respuestas de los sistemas físicos, para simularlas e interpretar las respuestas para determinar su estabilidad o inestabilidad y su comportamiento.
EC: Función de transferencia, estabilidad e inestabilidad, respuesta de un sistema ante una entrada escalón, rampa, impulso, sinusoidal, etc..
Cuestionario Lista de cotejo
Exposición Resolución de
ejercicios Simulación
X
11 2 0 0
EP: Simulación de sistemas ante una entrada cualquiera en un software de modelado. EC: Diagrama de bloques, reducción con diagramas de bloques, Simulación de sistemas con diagramas de bloques
Cuestionario Exposición
Investigación X

9
Resultados de Aprendizaje
Criterios de Desempeño
Evidencias (EP, ED, EC, EA)
Instrumento de evaluación.
Técnicas de aprendizaje
Espacio educativo Total de horas
Teoría Práctica
Aula Lab. otro HP HNP HP HNP
EP: Simulación de sistemas con diagramas de bloques.
Lista de cotejo
Práctica mediante la
acción X 0 0 10 1
El alumno realiza analogías entre sistemas
Identifica las analogías de los sistemas y realiza conversiones entre dichas analogías, así como simula sistemas físicos implementados en un computador analógico.
EC: Analogías de sistemas, Analogía tensión-fuerza, Analogía corriente-fuerza.
Cuestionario Exposición
Investigación X
11 2 0 0
El alumno simula sistemas físicos mediante computadoras analógicas
EC: Amplificador operacional, configuraciones básicas.
Cuestionario Exposición X
EP: Armado de sistemas físicos en una computadora analógica con op amp’s.
Lista de cotejo
Práctica mediante la
acción X 0 0 10 3

10
LINEAMIENTOS DE EVALUACIÓNLINEAMIENTOS DE EVALUACIÓNLINEAMIENTOS DE EVALUACIÓNLINEAMIENTOS DE EVALUACIÓN Los lineamientos de evaluación pueden variar dependiendo de las políticas de evaluación de cada Universidad. La evaluación será por evidencias EVIDENCIAS
DESEMPEÑO PRODUCTO CONOCIMIENTOS
Desempeño del alumno Ejercicios Cuestionarios por evidencia o conjunto de evidencias
Proyecto integrador Evaluación Integradora La evaluación de cada evidencia será mediante un instrumento de evaluación La Evaluación Integradora puede ser la recopilación de evidencias no alcanzadas o Evaluación Departamental, la cual evalúa que se ha alcanzado el objetivo general de la asignatura. El Proyecto Integrador puede ser la presentación, el reporte y armado de un proyecto final que involucre los conocimientos adquiridos que puede ser evaluado junto al profesor titular con otros profesores que le den una vista objetiva al proyecto.

11
DESARROLLO DE PRÁCTICADESARROLLO DE PRÁCTICADESARROLLO DE PRÁCTICADESARROLLO DE PRÁCTICA
Fecha: Nombre de la asignatura:
MODELADO Y SIMULACIÓN DE SISTEMAS
Nombre:
Modelado de Sistemas
Número :
1
Duración (horas) :
10
Resultado de aprendizaje:
El alumno obtiene la representación de los sistemas físicos. El alumno obtiene la representación de los sistemas físicos. El alumno obtiene la representación de los sistemas físicos. El alumno obtiene la representación de los sistemas físicos.
Justificación
La práctica reafirmará el conocimiento que se adquirió en clase mediante el modelado de un sistema físico.
Sector o subsector para el desarrollo de la práctica: Sector Industrial Actividades a desarrollar:
1. Visitar el laboratorio donde se encuentren sistemas físicos 2. Observar y Seleccionar un sistema físico a modelar 3. Tomar los valores necesarios para el desarrollo del modelo 4. Investigar las ecuaciones y obtener su función de transferencia y la representación del
espacio de estados. Evidencia a generar en el desarrollo de la práctica: EP: EP: EP: EP: Reporte de ejercicios de modelado de sistemas mecánicos, eléctricos, electromecánicos, Reporte de ejercicios de modelado de sistemas mecánicos, eléctricos, electromecánicos, Reporte de ejercicios de modelado de sistemas mecánicos, eléctricos, electromecánicos, Reporte de ejercicios de modelado de sistemas mecánicos, eléctricos, electromecánicos, electrónicos, hidráulicos y térmicos.electrónicos, hidráulicos y térmicos.electrónicos, hidráulicos y térmicos.electrónicos, hidráulicos y térmicos.
DESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICA

12
Fecha: Nombre de la asignatura:
MODELADO Y SIMULACIÓN DE SISTEMAS
Nombre:
Simulación de Sistemas
Número :
2
Duración (horas) :
10
Resultado de aprendizaje:
El alumno obtiene las respuestas de los sistemas físicos en un software de El alumno obtiene las respuestas de los sistemas físicos en un software de El alumno obtiene las respuestas de los sistemas físicos en un software de El alumno obtiene las respuestas de los sistemas físicos en un software de simulaciónsimulaciónsimulaciónsimulación
Justificación
La práctica reafirmará el conocimiento que se adquirió en clase mediante la simulación en software adecuado.
Sector o subsector para el desarrollo de la práctica: Sector Industrial Actividades a desarrollar:
1. Simular, observar su respuesta, interpretarla y ver si el sistema es estable o inestable de: a) Un sistema Mecánico b) Un sistema Eléctrico c) Un sistema Electrónico d) Un sistema electromecánico e) Un sistema hidráulico f) Un sistema Térmico
Evidencia a generar en el desarrollo de la práctica: EP: EP: EP: EP: Simulación de sistemas con diagramas de bloquesSimulación de sistemas con diagramas de bloquesSimulación de sistemas con diagramas de bloquesSimulación de sistemas con diagramas de bloques
DESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICADESARROLLO DE PRACTICA

13
Fecha: Nombre de la asignatura:
MODELADO Y SIMULACIÓN DE SISTEMAS
Nombre:
Computador Analógico
Número :
3
Duración (horas) :
10
Resultado de aprendizaje:
El alumno simula sistemas físicos mediante computadoras anEl alumno simula sistemas físicos mediante computadoras anEl alumno simula sistemas físicos mediante computadoras anEl alumno simula sistemas físicos mediante computadoras analógicasalógicasalógicasalógicas
Justificación
La práctica reafirmará el conocimiento que se adquirió en clase mediante el armado electrónico de sistemas.
Sector o subsector para el desarrollo de la práctica: Sector Industrial Actividades a desarrollar:
1. Modelar un sistema físico (a proponer) 2. Simular el sistema físico anterior 3. Armar el sistema físico con amplificadores operacionales 4. Analizar su comportamiento 5. Comprobar los resultados y compararlos con la simulación en el software.
Evidencia a generar en el desarrollo de la práctica: EP: Armado de sistemas físicos en una computadora analógica con op amp’s.EP: Armado de sistemas físicos en una computadora analógica con op amp’s.EP: Armado de sistemas físicos en una computadora analógica con op amp’s.EP: Armado de sistemas físicos en una computadora analógica con op amp’s.
DESARRODESARRODESARRODESARROLLO DE PRACTICALLO DE PRACTICALLO DE PRACTICALLO DE PRACTICA

14
Unidades de Unidades de Unidades de Unidades de aprendizajeaprendizajeaprendizajeaprendizaje
Resultados de Resultados de Resultados de Resultados de aprendizajeaprendizajeaprendizajeaprendizaje
EVALUACIÓNEVALUACIÓNEVALUACIÓNEVALUACIÓN
Enfoque: Enfoque: Enfoque: Enfoque: (DG)Diagnóstica, (FO) (DG)Diagnóstica, (FO) (DG)Diagnóstica, (FO) (DG)Diagnóstica, (FO)
Formativa, (SU) Formativa, (SU) Formativa, (SU) Formativa, (SU) SumativSumativSumativSumativaaaa
TécnicaTécnicaTécnicaTécnica InstrumentInstrumentInstrumentInstrumentoooo Total Total Total Total de de de de
horashorashorashoras
Introducción al Modelado y Simulación
El alumno define conceptos básicos del modelado y simulación
DG,FO,SU
Exposición del Profesor
Exposición del alumno
Discusión en grupos
Lluvia de Ideas
Cuestionario Lista de Cotejo
6
Modelos matemáticos y soluciones analíticas
El alumno representa ecuaciones diferenciales en modelos matemáticos de entrada-salida y de espacio de estados
DG,FO,SU
Exposición del profesor
Exposición del alumno
Resolución de ejercicios
Cuestionario Lista de cotejo
10
El alumno obtiene la solución analítica de modelos matemáticos
Modelado de sistemas físicos
El alumno modela sistemas físicos: Mecánicos, eléctricos, electromecánicos, hidráulicos y térmicos.
DG, FO, SU
Exposición Lluvia de
Ideas Investigación
Práctica mediante la
acción
Cuestionario Lista de cotejo
24
Simulación de sistemas físicos
El alumno analiza la respuesta dinámica de sistemas físicos
DG, FO, SU
Exposición Lluvia de
Ideas Investigación
Práctica mediante la
acción
Cuestionario Lista de cotejo
24
Principios básicos del computador analógico
El alumno realiza analogías entre sistemas
DG, FO
Exposición Lluvia de
Ideas
Cuestionario Lista de cotejo
26 El alumno simula sistemas físicos
DG, FO, SU
MÉTODO DE EVALUACIÓNMÉTODO DE EVALUACIÓNMÉTODO DE EVALUACIÓNMÉTODO DE EVALUACIÓN

15
mediante computadoras analógicas
Investigación Práctica
mediante la acción

16
INSTRUMENTOS DE EVALUACIÓNINSTRUMENTOS DE EVALUACIÓNINSTRUMENTOS DE EVALUACIÓNINSTRUMENTOS DE EVALUACIÓN
INTRODUCCIÓN AL MODELADO Y SIMULACIÓN DE SISTEMASINTRODUCCIÓN AL MODELADO Y SIMULACIÓN DE SISTEMASINTRODUCCIÓN AL MODELADO Y SIMULACIÓN DE SISTEMASINTRODUCCIÓN AL MODELADO Y SIMULACIÓN DE SISTEMAS
((((MSSMSSMSSMSS----0101010101010101)))) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA,
MODELADO Y SIMULACIÓN DE SISTEMAS
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Quinto Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO
MSS0101-01
1. Defina los siguientes conceptos A) Sistema B) Lazo Abierto C) Lazo Cerrado D) Función de Transferencia E) Modelado F) Simulación
CUMPLE : SI NO
17
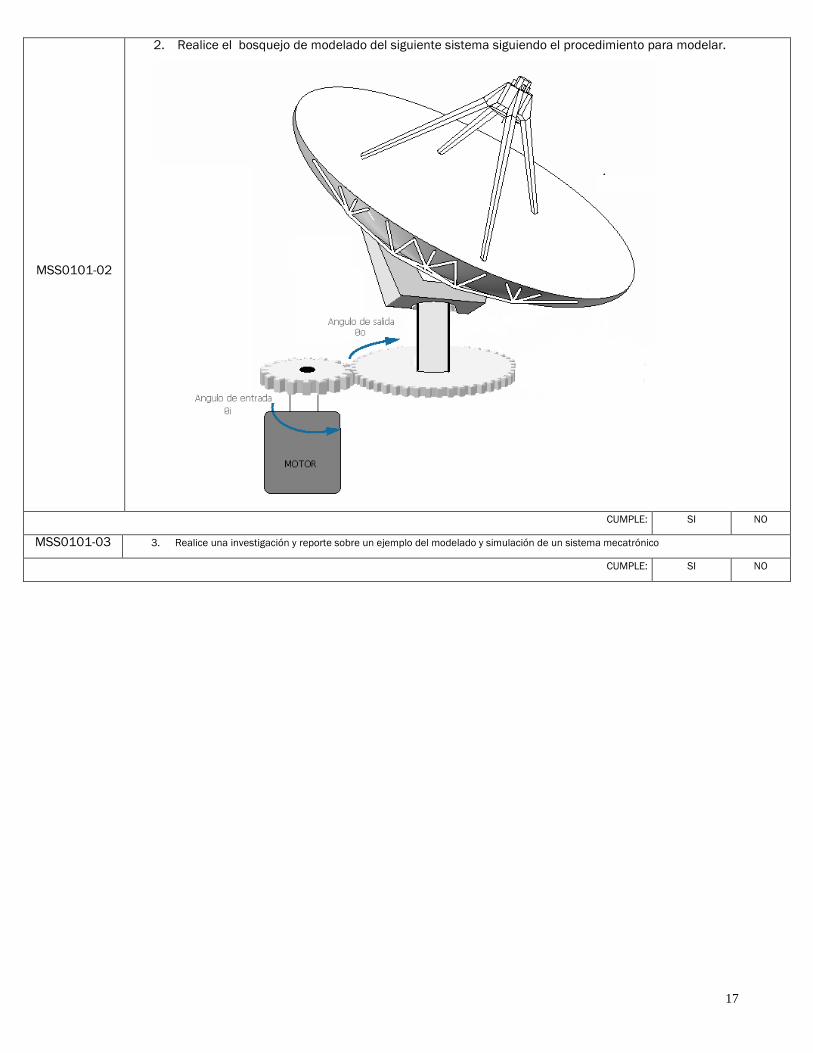
MSS0101-02
2. Realice el bosquejo de modelado del siguiente sistema siguiendo el procedimiento para modelar.
CUMPLE: SI NO
MSS0101-03 3. Realice una investigación y reporte sobre un ejemplo del modelado y simulación de un sistema mecatrónico
CUMPLE: SI NO

18
MMMMODELOS MATEMÁTICOS Y SOLUCIONES ANÁLITICASODELOS MATEMÁTICOS Y SOLUCIONES ANÁLITICASODELOS MATEMÁTICOS Y SOLUCIONES ANÁLITICASODELOS MATEMÁTICOS Y SOLUCIONES ANÁLITICAS
(MSS(MSS(MSS(MSS0102)0102)0102)0102) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
MODELADO Y SIMULACION DE SISTEMAS
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Quinto Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO
MSSMSSMSSMSS0102010201020102----01010101
1. Transforme el siguiente sistema de ecuaciones en: a) Función de Transferencia b) Espacio de estados
uyykym
yykybym
=−+
=−++
••
•••
)(
0)(
1222
21111
2. Obtenga el espacio de estados de la siguiente función de transferencia
254
22
)(
)(23
23
++++++=
sss
sss
sU
sY
3. Establezca la relación de los valores propios en la relación de la función de transferencia y el
espacio de estados. CUMPLE : SI NO

19
MSS0102MSS0102MSS0102MSS0102----02020202
1.1.1.1. Obtenga la ecuación diferencial de la siguiente grafica.
2.2.2.2. Determine la función de transferencia y grafique la respuesta ante una entrada escalón de las
siguientes ecuaciones diferenciales.
a) )(6)(4 trtxdt
dx =+ b ) dx
dyxyy
dx
dyxa =
+ 2 donde a es constante
3.3.3.3. Grafique la respuesta del sistema ante una entrada escalón y diga que tipo de respuesta es.
xSenxyyyb
yyya
=+′+′′=′′+′′′+
)
0) 4
4.4.4.4. Dibuje las respuesta sobreamortiguada, subamortiguada y críticamente amortiguada
CUMPLE : SI NO

20
MODELADO MODELADO MODELADO MODELADO Y SIMULACIÓN Y SIMULACIÓN Y SIMULACIÓN Y SIMULACIÓN DE SISTEMAS FÍSICOSDE SISTEMAS FÍSICOSDE SISTEMAS FÍSICOSDE SISTEMAS FÍSICOS
((((MSSMSSMSSMSS0103)0103)0103)0103) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
MODELADO Y SIMULACIÓN DE SISTEMAS
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Quinto Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO
MSSMSSMSSMSS0000101010103333----01010101
1. Obtenga el espacio de estados del siguiente diagrama
2. Encontrar la función de transferencia del siguiente sistema
3. De la función de transferencia anterior obtener:
a) Representación en el espacio de estados
b) Gráfica de la respuesta ante una entrada rampa
c) Respuesta ante una entrada escalón
CUMPLE : SI NO

21
MSSMSSMSSMSS0000103103103103----00002222
1. Obtenga el modelo matemático del siguiente sistema, la función de transferencia y
el espacio de estados.
2. Obtenga la función de transferencia y el espacio de estados del siguiente sistema
© Nise/Control Systems Engineering
3. Modele el siguiente sistema
© Nise/Control Systems Engineering
CUMPLE : SI NO

22
MODELADO MODELADO MODELADO MODELADO Y SIMULACIÓN Y SIMULACIÓN Y SIMULACIÓN Y SIMULACIÓN DE SISTEMAS FÍSICOS IIDE SISTEMAS FÍSICOS IIDE SISTEMAS FÍSICOS IIDE SISTEMAS FÍSICOS II
(MS(MS(MS(MS0100100100104444)))) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DELDATOS GENERALES DELDATOS GENERALES DELDATOS GENERALES DEL PROCESO DE EVALUACIÓNPROCESO DE EVALUACIÓNPROCESO DE EVALUACIÓNPROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
MODELADO Y SIMULACIÓN DE SISTEMAS
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Quinto Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO
MSSMSSMSSMSS0100100100104444----00001111
1. Obtenga la función de transferencia del siguiente diagrama
U1
OPAMP_3T_VIRTUAL
R13.0kΩ
R2
50KΩ_LINKey = A
35%
V1
12 V 3
0
V2
5 V 60 Hz 0Deg
0
R3
1.0kΩ1
R4
3.0kΩ
2 7
5
40
2. Tome tres sistemas físicos (electromecánicos, hidráulicos y térmicos) y calcule su función de
transferencia, así como su respuesta ante la entrada escalón unitario.
CUMPLE : SI NO
23
DIAGRAMAS DE BLOQUESDIAGRAMAS DE BLOQUESDIAGRAMAS DE BLOQUESDIAGRAMAS DE BLOQUES
(MSS(MSS(MSS(MSS0100100100105555)))) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
MODELADO Y SIMULACIÓN DE SISTEMAS
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Quinto Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO
MSSMSSMSSMSS0100100100105555----00001111
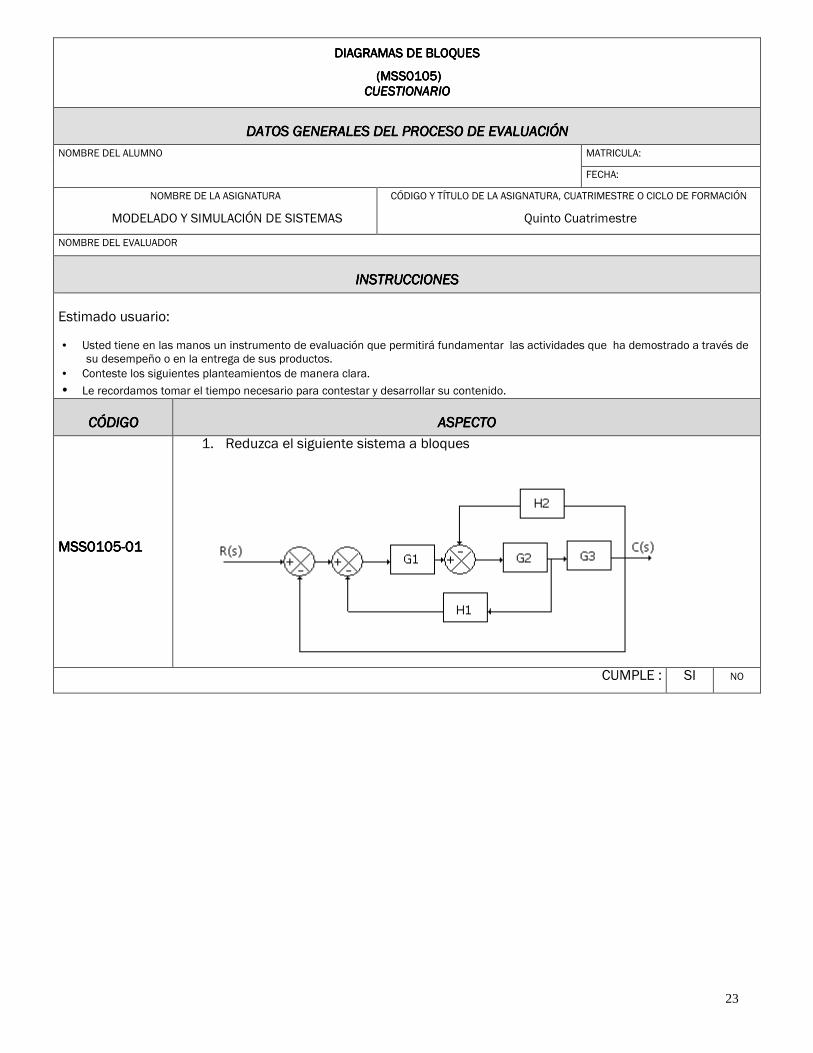
1. Reduzca el siguiente sistema a bloques
CUMPLE : SI NO

24
MSSMSSMSSMSS0105010501050105----02020202
1. Un sistema esta representado por las siguientes ecuaciones. Represéntelo con un sistema de bloques.
)(
)()(
:
))()((2)(
)(5.2)(
))()((005.0)(
)(4)(005.0)(
)(10)(
SR
SHST
donde
tqtqdt
tdh
thtv
trthtw
twtrtq
thtn
se
s
=
−=
=−=+=
=
2. Reduzca el siguiente sistema de bloques
CUMPLE : SI NO

25
PRINCIPIOS BÁSICOS DEL COMPUTADOS ANALÓGICOPRINCIPIOS BÁSICOS DEL COMPUTADOS ANALÓGICOPRINCIPIOS BÁSICOS DEL COMPUTADOS ANALÓGICOPRINCIPIOS BÁSICOS DEL COMPUTADOS ANALÓGICO
(EA(EA(EA(EA0106)0106)0106)0106) CUESTIONARIOCUESTIONARIOCUESTIONARIOCUESTIONARIO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO MATRICULA:
FECHA:
NOMBRE DE LA ASIGNATURA
MODELADO Y SIMULACIÓN DE SISTEMAS
CÓDIGO Y TÍTULO DE LA ASIGNATURA, CUATRIMESTRE O CICLO DE FORMACIÓN
Quinto Cuatrimestre
NOMBRE DEL EVALUADOR
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Estimado usuario:
• Usted tiene en las manos un instrumento de evaluación que permitirá fundamentar las actividades que ha demostrado a través de su desempeño o en la entrega de sus productos.
• Conteste los siguientes planteamientos de manera clara.
• Le recordamos tomar el tiempo necesario para contestar y desarrollar su contenido.
CÓDIGOCÓDIGOCÓDIGOCÓDIGO ASPECTOASPECTOASPECTOASPECTO

26
MSSMSSMSSMSS0106010601060106----01010101
1. Explique las analogías y dé un ejemplo entre tensión-fuerza y corriente-fuerza.
2. Identifique las partes de un amplificador operacional2. Identifique las partes de un amplificador operacional2. Identifique las partes de un amplificador operacional2. Identifique las partes de un amplificador operacional
U1
OPAMP_3T_VIRTUAL
7
3. Dibuje las siguientes configuraciones del amplificador operaciona
A) Inversor
B) No Inversor
C) Integral
D) Diferencial
e) Proporcional
4. Arme el siguiente sistema físico en un computador analógico que simule la respuesta de dicho
sistema.
CUMPLE : SI NO

27
UNUNUNUNIVIVIVIVERSIDAD POLITÉCNICA DE AGUASCALIENTESERSIDAD POLITÉCNICA DE AGUASCALIENTESERSIDAD POLITÉCNICA DE AGUASCALIENTESERSIDAD POLITÉCNICA DE AGUASCALIENTES
INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA
EVALUACIÓN DE EJERCICIOS EVALUACIÓN DE EJERCICIOS EVALUACIÓN DE EJERCICIOS EVALUACIÓN DE EJERCICIOS
LISTA DE COTEJO LISTA DE COTEJO LISTA DE COTEJO LISTA DE COTEJO
DATOS GENERALES DEL PROCESO DE EVALUACDATOS GENERALES DEL PROCESO DE EVALUACDATOS GENERALES DEL PROCESO DE EVALUACDATOS GENERALES DEL PROCESO DE EVALUACIÓNIÓNIÓNIÓN
NOMBRE DEL ALUMNO: MATRICULA: FIRMA DEL ALUMNO:
PRODUCTO: PARCIAL: FECHA:
MATERIA: CLAVE:
NOMBRE DEL MAESTRO: FIRMA DEL MAESTRO:
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
En la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esencial o ación al reactivo o el tipo (esencial o ación al reactivo o el tipo (esencial o ación al reactivo o el tipo (esencial o importante) importante) importante) importante)
Revisar las actividades que se solicitan y marque en los apartados Revisar las actividades que se solicitan y marque en los apartados Revisar las actividades que se solicitan y marque en los apartados Revisar las actividades que se solicitan y marque en los apartados “SI” cuando la evidencia se cumple; en caso contrario marque cuando la evidencia se cumple; en caso contrario marque cuando la evidencia se cumple; en caso contrario marque cuando la evidencia se cumple; en caso contrario marque “NO”. En la columna “OBSERVACIONES” mencione indicaciones que puedan ayudEn la columna “OBSERVACIONES” mencione indicaciones que puedan ayudEn la columna “OBSERVACIONES” mencione indicaciones que puedan ayudEn la columna “OBSERVACIONES” mencione indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no ar al alumno a saber cuales son las condiciones no ar al alumno a saber cuales son las condiciones no ar al alumno a saber cuales son las condiciones no cumplidas, si fuese necesario.cumplidas, si fuese necesario.cumplidas, si fuese necesario.cumplidas, si fuese necesario.
CódigoCódigoCódigoCódigo ValorValorValorValor Característica a cumplir (Reactivo)Característica a cumplir (Reactivo)Característica a cumplir (Reactivo)Característica a cumplir (Reactivo) CUMPLECUMPLECUMPLECUMPLE
OBSERVACIONESOBSERVACIONESOBSERVACIONESOBSERVACIONES
SISISISI NONONONO
ActitudesActitudesActitudesActitudes Realiza las tareas requeridas de acuerdo a lo indicado, manteniendo el orden y pulcritud.
Presentación Presentación Presentación Presentación El ejercicio es presentado en forma ordenada y limpia
Desarrollo. Desarrollo. Desarrollo. Desarrollo. Aplica adecuadamente los procedimientos
Realizó todas las operaciones y despejes correctamente
Aprendizajes.Aprendizajes.Aprendizajes.Aprendizajes. Se alcanzaron al 100% los resultados de aprendizaje
Funcionalidad.Funcionalidad.Funcionalidad.Funcionalidad. Los valores de las incógnitas a determinar son los correctos.
HabilidadesHabilidadesHabilidadesHabilidades .... Trabaja en equipo.
Responsabilidad. Responsabilidad. Responsabilidad. Responsabilidad. Entregó las evidencias en la fecha y hora señalada
CALIFICACIÓN:CALIFICACIÓN:CALIFICACIÓN:CALIFICACIÓN:

28
UNIVERSIDAD PUNIVERSIDAD PUNIVERSIDAD PUNIVERSIDAD POLITÉCNICA DE OLITÉCNICA DE OLITÉCNICA DE OLITÉCNICA DE AGUASCALIENTESAGUASCALIENTESAGUASCALIENTESAGUASCALIENTES
INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA INGENIERÍA MECATRÓNICA
EVALUACIÓN DE PROYECTO INTEGRADOR EVALUACIÓN DE PROYECTO INTEGRADOR EVALUACIÓN DE PROYECTO INTEGRADOR EVALUACIÓN DE PROYECTO INTEGRADOR Y PRÁCTICASY PRÁCTICASY PRÁCTICASY PRÁCTICAS
LISTA DE COTEJOLISTA DE COTEJOLISTA DE COTEJOLISTA DE COTEJO
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO: MATRICULA: FIRMA DEL ALUMNO:
PRODUCTO: PARCIAL: FECHA:
MATERIA: CLAVE:
NOMBRE DEL MAESTRO: FIRMA DEL MAESTRO:
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
En la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esencial o encial o encial o encial o importanteimportanteimportanteimportante. . . . Revisar las actividades que se solicitan y marque Revisar las actividades que se solicitan y marque Revisar las actividades que se solicitan y marque Revisar las actividades que se solicitan y marque en los apartados en los apartados en los apartados en los apartados “SI” cuando la evidencia se cumple; en caso contrario cuando la evidencia se cumple; en caso contrario cuando la evidencia se cumple; en caso contrario cuando la evidencia se cumple; en caso contrario marque marque marque marque “NO”. En la columna “OBSERVACIONES” ” mencione indicaciones que puedan ayudar al alumno a saber cuales son las En la columna “OBSERVACIONES” ” mencione indicaciones que puedan ayudar al alumno a saber cuales son las En la columna “OBSERVACIONES” ” mencione indicaciones que puedan ayudar al alumno a saber cuales son las En la columna “OBSERVACIONES” ” mencione indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no cumplidas, si fuese necesario.condiciones no cumplidas, si fuese necesario.condiciones no cumplidas, si fuese necesario.condiciones no cumplidas, si fuese necesario.
CódigoCódigoCódigoCódigo ValorValorValorValor CaracCaracCaracCaracterística a cumplir (Reactivo)terística a cumplir (Reactivo)terística a cumplir (Reactivo)terística a cumplir (Reactivo) CUMPLECUMPLECUMPLECUMPLE
OBSERVACIONESOBSERVACIONESOBSERVACIONESOBSERVACIONES
SISISISI NONONONO
Presentación Presentación Presentación Presentación El reporte cumple con los requisitos de:
a. Buena presentación b. No tiene faltas de ortografía c. Maneja el lenguaje técnico
apropiado.
Contenido. Contenido. Contenido. Contenido. El reporte contiene los campos según formato (Número mínimo de cuartillas, antecedentes, justificación, introducción, desarrollo, indicadores de resultados, conclusiones, fuentes bibliográficas, etc.).
Introducción y Objetivo.Introducción y Objetivo.Introducción y Objetivo.Introducción y Objetivo. La introducción y el objetivo dan una idea clara del contenido del reporte.
Sustento Teórico.Sustento Teórico.Sustento Teórico.Sustento Teórico. Presenta un panorama general del tema a desarrollar y lo sustenta con referencias bibliográficas
Desarrollo.Desarrollo.Desarrollo.Desarrollo. Sigue una metodología y sustenta todos los pasos que se realizaron.
ResultadosResultadosResultadosResultados. Cumplió totalmente con el objetivo esperado
Conclusiones.Conclusiones.Conclusiones.Conclusiones. Las conclusiones son claras y acordes con el objetivo esperado
Responsabilidad. Responsabilidad. Responsabilidad. Responsabilidad. Entregó el reporte en la fecha y hora señalada
CALIFICACIÓN:CALIFICACIÓN:CALIFICACIÓN:CALIFICACIÓN:

29
UNIVERSIDAD POLITÉCNICA DE UNIVERSIDAD POLITÉCNICA DE UNIVERSIDAD POLITÉCNICA DE UNIVERSIDAD POLITÉCNICA DE AGUASCALIENTESAGUASCALIENTESAGUASCALIENTESAGUASCALIENTES
INGENINGENINGENINGENIERÍA MECATRÓNICA IERÍA MECATRÓNICA IERÍA MECATRÓNICA IERÍA MECATRÓNICA EVALUACIÓN DE DESEMPEÑO DEL ALUMNO EVALUACIÓN DE DESEMPEÑO DEL ALUMNO EVALUACIÓN DE DESEMPEÑO DEL ALUMNO EVALUACIÓN DE DESEMPEÑO DEL ALUMNO
GUIA DE OBSERVACIÓNGUIA DE OBSERVACIÓNGUIA DE OBSERVACIÓNGUIA DE OBSERVACIÓN
DATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓNDATOS GENERALES DEL PROCESO DE EVALUACIÓN
NOMBRE DEL ALUMNO: MATRICULA: FIRMA DEL ALUMNO:
PRODUCTO: PARCIAL: FECHA:
MATERIA: CLAVE:
NOMBRE DEL MAESTRO: FIRMA DEL MAESTRO:
INSTRUCCIONESINSTRUCCIONESINSTRUCCIONESINSTRUCCIONES
Esté tipo de evidencia se evalúa durante el desarrollo de la asignatura Esté tipo de evidencia se evalúa durante el desarrollo de la asignatura Esté tipo de evidencia se evalúa durante el desarrollo de la asignatura Esté tipo de evidencia se evalúa durante el desarrollo de la asignatura
En la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esEn la columna de valor indique de acuerdo al sistema de evaluación de la Universidad la ponderación al reactivo o el tipo (esencial o encial o encial o encial o importanteimportanteimportanteimportante
Revisar las activiRevisar las activiRevisar las activiRevisar las actividades que se solicitan y marque en los apartados dades que se solicitan y marque en los apartados dades que se solicitan y marque en los apartados dades que se solicitan y marque en los apartados “SI” cuando la evidencia se cumple; en caso contrario marque cuando la evidencia se cumple; en caso contrario marque cuando la evidencia se cumple; en caso contrario marque cuando la evidencia se cumple; en caso contrario marque “NO”. En la columna “OBSERVACIONES”indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no En la columna “OBSERVACIONES”indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no En la columna “OBSERVACIONES”indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no En la columna “OBSERVACIONES”indicaciones que puedan ayudar al alumno a saber cuales son las condiciones no cumplidas, si fuese necesario.cumplidas, si fuese necesario.cumplidas, si fuese necesario.cumplidas, si fuese necesario.
CódigoCódigoCódigoCódigo ValorValorValorValor Característica a cumplir (Reactivo)Característica a cumplir (Reactivo)Característica a cumplir (Reactivo)Característica a cumplir (Reactivo) CUMPLECUMPLECUMPLECUMPLE
OBSERVACIONESOBSERVACIONESOBSERVACIONESOBSERVACIONES SISISISI NONONONO
ActitudesActitudesActitudesActitudes
Realiza las tareas requeridas de acuerdo a lo indicado, manteniendo el orden y pulcritud.
Respeto hacia los demás
Presentación Presentación Presentación Presentación
La actividad de aprendizaje es presentada en forma ordenada y limpia
Uso de Instalaciones Uso de Instalaciones Uso de Instalaciones Uso de Instalaciones
Uso adecuado de mobiliario
No ingerir alimentos en el lugar de trabajo
Participación en el Aula Participación en el Aula Participación en el Aula Participación en el Aula
Resolución de ejercicios
Explicación de tareas
Lluvia de ideas
HabilidadesHabilidadesHabilidadesHabilidades
Trabaja en equipo.
Responsabilidad Responsabilidad Responsabilidad Responsabilidad
Entregó las evidencias en la fecha y hora señalada
Asistencia
CALIFICACIÓN:CALIFICACIÓN:CALIFICACIÓN:CALIFICACIÓN:
30
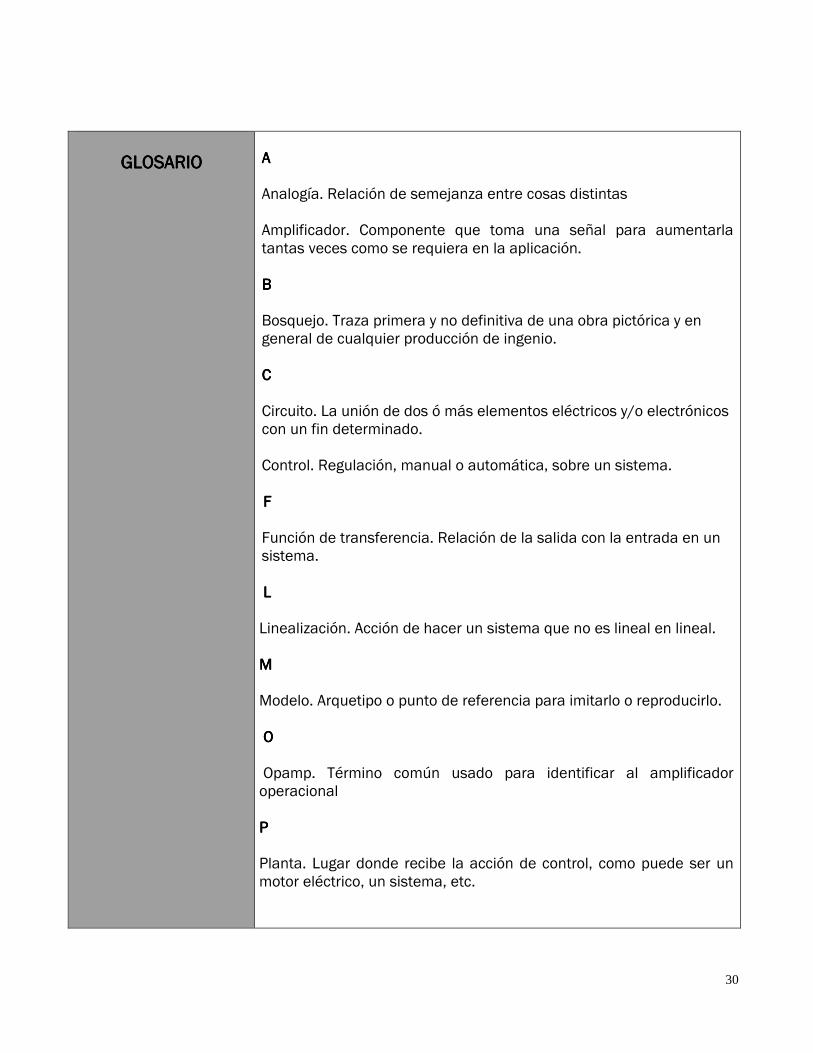
GLOSARIOGLOSARIOGLOSARIOGLOSARIO
AAAA Analogía. Relación de semejanza entre cosas distintas Amplificador. Componente que toma una señal para aumentarla tantas veces como se requiera en la aplicación. BBBB Bosquejo. Traza primera y no definitiva de una obra pictórica y en general de cualquier producción de ingenio. CCCC Circuito. La unión de dos ó más elementos eléctricos y/o electrónicos con un fin determinado. Control. Regulación, manual o automática, sobre un sistema. FFFF Función de transferencia. Relación de la salida con la entrada en un sistema. LLLL Linealización. Acción de hacer un sistema que no es lineal en lineal. MMMM Modelo. Arquetipo o punto de referencia para imitarlo o reproducirlo. OOOO Opamp. Término común usado para identificar al amplificador operacional PPPP Planta. Lugar donde recibe la acción de control, como puede ser un motor eléctrico, un sistema, etc.

31
SSSS Simulación. Acción de darle valores a la función de respuesta para ver el comportamiento del modelo físico. Sistema. Conjunto de elementos que llevan a un fin. Sistema de Lazo Abierto. Es un sistema que no tiene retroalimentación de su salida. Sistema de Lazo Cerrado. Es un sistema que tiene retroalimentación de la salida y puede corregir errores que se presenten.

32
BIBLIBIBLIBIBLIBIBLIOGRAFÍOGRAFÍOGRAFÍOGRAFÍAAAA
1. Real Academia Española, Diccionario de la Lengua Española. http://buscon.rae.es/diccionario/cabecera.htm. Consultado el 17 de Marzo de 2006.
2. Guía Técnica para la elaboración del manual de asignatura. Coordinación de Universidades Politécnicas. 2005.
3. Bolton, W. Mecatrónica. Sistemas de control electrónico en Mecatrónica. Sistemas de control electrónico en Mecatrónica. Sistemas de control electrónico en Mecatrónica. Sistemas de control electrónico en ingeniería mecánica y eléctrica.ingeniería mecánica y eléctrica.ingeniería mecánica y eléctrica.ingeniería mecánica y eléctrica. Segunda Ed. Alfaomega.
4. Shearer, J. Lowen y Kulakowski, Bohdan T., Dynamic Modeling and
Control of Engineering Systems, Segunda Edición.
5. Eronini, Umez-Eronini, Dinámica de Sistemas y Control, Dinámica de Sistemas y Control, Dinámica de Sistemas y Control, Dinámica de Sistemas y Control, Primera Edición, Thomson, México.
6. Ogata, Katsuhiko, Ingeniería de Control ModernaIngeniería de Control ModernaIngeniería de Control ModernaIngeniería de Control Moderna, Cuarta Edición,
Prentice Hall, México.
7. Lewis H. Paul y Yang Chang, Sistemas de Control en IngenieríaSistemas de Control en IngenieríaSistemas de Control en IngenieríaSistemas de Control en Ingeniería, Primera Edición, Prentice Hall.
8. Flinn y Trojan, Materiales de Ingeniería y sus AplicacionesMateriales de Ingeniería y sus AplicacionesMateriales de Ingeniería y sus AplicacionesMateriales de Ingeniería y sus Aplicaciones, Tercera
edición, Mc Graw Hill..
9. Ogata, Katsuhiko, Problemas de Ingeniería de Control Utilizando Problemas de Ingeniería de Control Utilizando Problemas de Ingeniería de Control Utilizando Problemas de Ingeniería de Control Utilizando MatlabMatlabMatlabMatlab, Primera Edición, Prentice Hall.
10. McGill, David J. y King, Wilton W., Mecánica para Ingeniería y sus
Aplicaciones, Primera Edición, Grupo Editorial Iberoamericana, México.
11. Nise. Sistemas de control para ingeniería. Editorial Patria Cultural. México

33