Embed Size (px)
Citation preview

MODELACION DINAMICA DE SISTEMAS DE CONTROL
UNIDAD 2
ING. CARLOS E.E HUAN DE LA CRUZ
INSTITUTO TECNOLOGICO SUPERIOR DE LOS RIOS
2.1Definiciones2.2 Modelos de procesos químicos2.3 Linearización de procesos no lineales2.3 Sistema de primer orden2.4 Sistema de segundo orden2.5 Sistema de orden superior

Definición de control
Es la acción o el efecto de poder decidir sobre el desarrollo de un proceso o sistema.
También se puede entender como la forma de manipular ciertas variables para conseguir que ellas u otras variables actúen en la forma deseada.

Sistema de control En el sistema de control nos
vamos a encontrar.
In: Variables de entrada: Indican que es lo que debe hacer el sistema.
Out: Variables de salida: Son el efecto producido por el sistema.
Perturbaciones: Son variables ajenas al sistema pero que pueden influir en su funcionamiento y no podemos controlar
Variables de control: Son variables internas del sistema que se emplean para su funcionamiento.
SISTEMA DE CONTROLOBJETIVOS ACTUACIONES

Definiciones Sistema. Es una combinación de componentes que actúan conjuntamente para lograr cierto
objetivo. El concepto de sistema se puede aplicar a fenómenos físicos, biológicos, económicos, sociales y otros.
Proceso. Es el desarrollo natural de un acontecimiento, caracterizado por una serie de eventos o cambio graduales, progresivamente continuos y que tienden a un resultado final
Planta. Conjunto de piezas de una maquinaria que tienen por objetivo realizar cierta actividad en conjunto. En sistemas de control, por planta se entiende el sistema que se quiere controlar.
Variable controlada (Salida). Es la cantidad o condición que se mide y controla.
Variable manipulada. Es la variable que se modifica con el fin de afectar la variable controlada.
Perturbaciones. Una perturbación es algún suceso que afecta adversamente el desarrollo de algún proceso. Si la perturbación se genera dentro del sistema, se le denomina perturbación interna, caso contrario la Perturbación es externa.

ELEMENTOS EN UN SISTEMA DE CONTROL
VARIABLE A CONTROLARPLANTA O SISTEMASENSORSEÑAL DE RFERENCIAACTUADORCONTROLADOR.
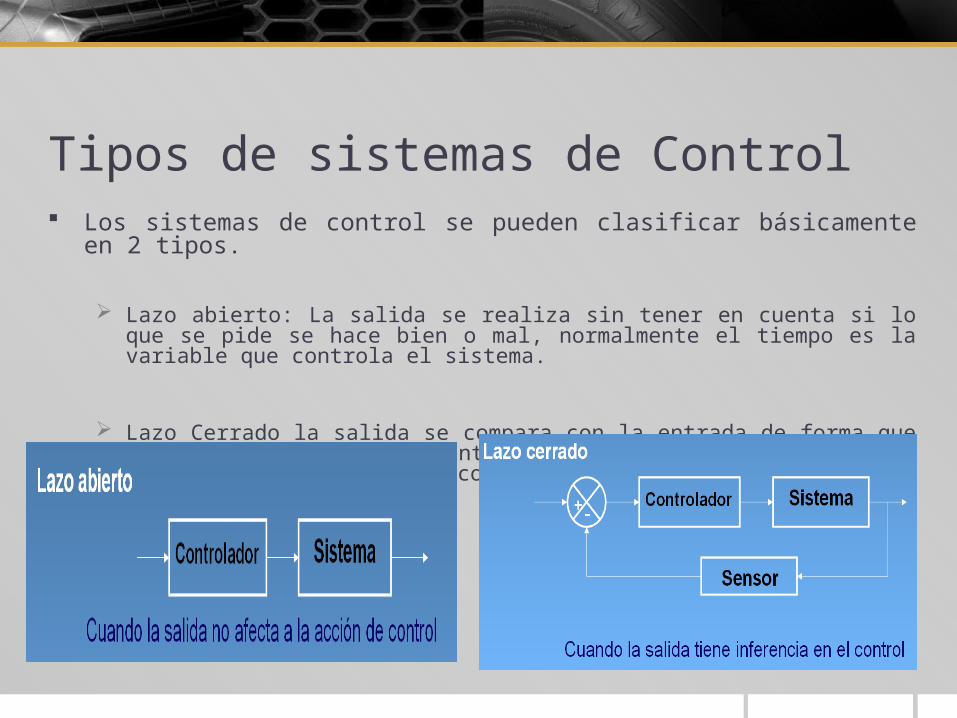
Tipos de sistemas de Control Los sistemas de control se pueden clasificar básicamente en 2 tipos.
Lazo abierto: La salida se realiza sin tener en cuenta si lo que se pide se hace bien o mal, normalmente el tiempo es la variable que controla el sistema.
Lazo Cerrado la salida se compara con la entrada de forma que se comprueba en todo momento que la salida es la esperada y sino es así el sistema se corrige.

Representación de los sistemas de control Los sistemas de control se pueden representar de dos maneras :Mediante una función matemática, denominada Función de transferencia. La función de transferencia nos dará las variaciones de salida en función de las variables de entrada. La ecuación matemática obtenida tendrá normalmente como variable el tiempo y será un a función compleja y difícil de resolver. Para su resolución se cambiará la variable tiempo por una variable S a través de la transformada de LAPLACE.
Mediante diagrama de Bloques: Se representarán las operaciones del sistema mediante bloque de operaciones simples y a partir de ahí se simplificará el sistema.
)(
)(
tgin
tfoutS
La función de transferencia
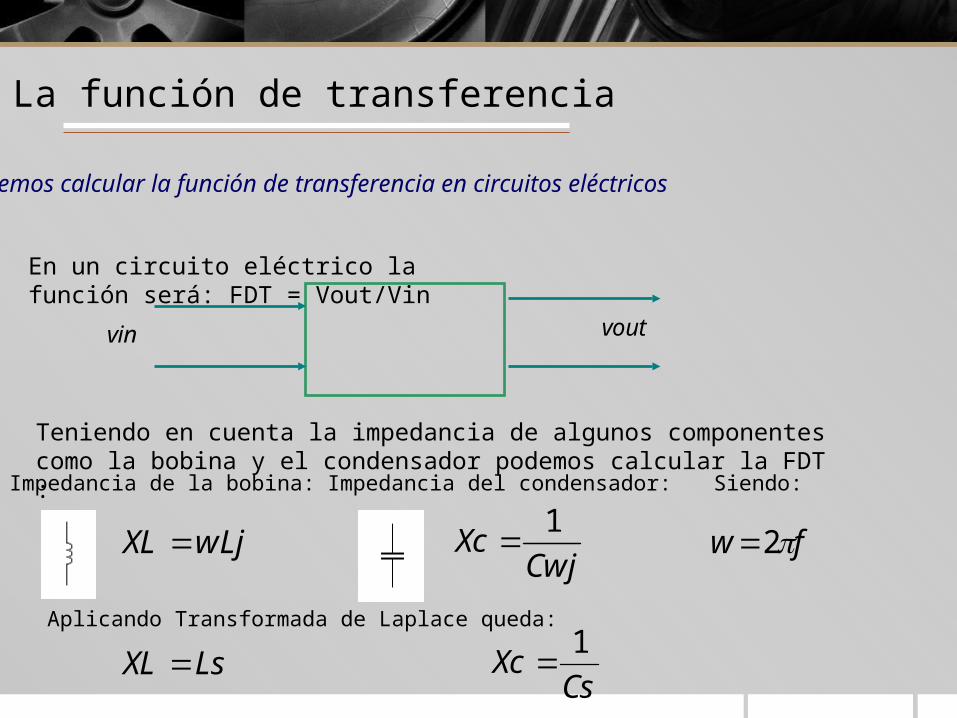
Podemos calcular la función de transferencia en circuitos eléctricos
En un circuito eléctrico la función será: FDT = Vout/Vin
vin
Teniendo en cuenta la impedancia de algunos componentes como la bobina y el condensador podemos calcular la FDT :
CwjXc
1
Impedancia de la bobina:
vout
fw 2wLjXL
Impedancia del condensador: Siendo:
LsXL Cs
Xc1
Aplicando Transformada de Laplace queda:

La función de transferencia
Ejemplos de funciones de transferencia: Circuito RL
L
R
)(ti
)(tv
Utilizando ley de voltajes de Kirchhoff, se tiene:
dt
diLRivin
Aplicando la transformada de Laplace
LsIRIVin
la función de transferencia, queda:
RLs
Ls
RILsI
LsI
Vin
VoutFDT
iLwjRivin
dt
diLtvout )(
iLwjvout
LsIVout

Diagramas de bloquesLa relación causa y efecto de la función de transferencia, permite representar las relaciones de un sistema por medios diagramáticos.
Los diagramas de bloques de un sistema son bloques operacionales y unidireccionales que representan la función de transferencia de las variables de interés.
Diagrama a bloques
• Tiene la ventaja de representar en forma más gráfica el flujo de señales de un sistema.• Con los bloques es posible evaluar la contribución de cada componente al desempeño total del sistema. • No incluye información de la construcción física del sistema (Laplace).• El diagrama de bloques de un sistema determinado no es único.
Consideraciones:
Diagramas de bloques
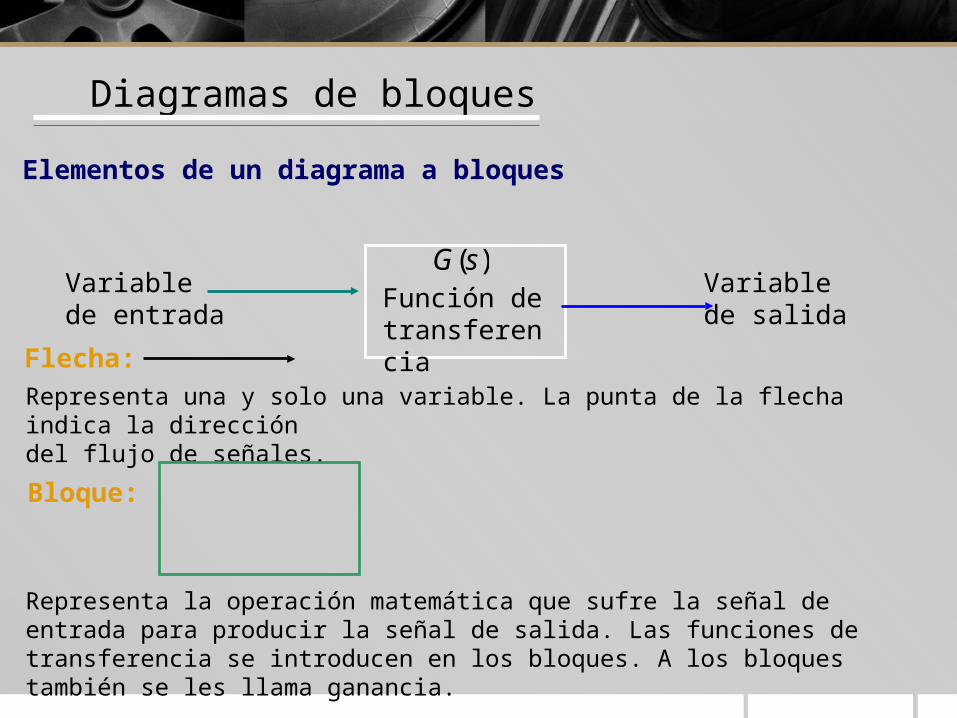
Elementos de un diagrama a bloques
Función de transferencia
)(sGVariablede entrada
Variablede salida
Flecha:Representa una y solo una variable. La punta de la flecha indica la direccióndel flujo de señales.
Bloque:
Representa la operación matemática que sufre la señal de entrada para producir la señal de salida. Las funciones de transferencia se introducen en los bloques. A los bloques también se les llama ganancia.

Diagramas de bloques
Diagrama de bloques de un sistema en lazo cerrado
)(sG+-
punto de suma punto de bifurcación
)(sH
)(sR)(sE )(sC
)(sB
Función de transferencia en lazo abierto)()(
)()(
sHsGsEsB
Función de transferencia trayectoria directa )()()(
sGsEsC
Función de transferencia lazo cerrado)()(1
)()()(
sHsGsG
sRsC

Reducción de diagrama de bloques
)()( 21 sGsG )(sR )(sC
Por elementos en paralelo
)(1 sG)(sR
)(1 sG
++
)(sC
Por elementos en serie
)(1 sG)(sR )(sC)(sD
)(2 sG )()( 21 sGsG)(sR )(sC
Diagramas de bloques

Reducción de diagrama de bloques
La simplificación de un diagrama de bloques complicado se realiza mediante alguna combinación de las tres formas básicas para reducir bloques y el reordenamiento del diagrama de bloques utilizando reglas del álgebra de los diagramas de bloques.
)(sG+ -
)(sH
)(sR )(sE )(sC
)(sB
Por elementos en lazo cerrado
)()(1)(sHsG
sG
)(sR )(sC
Diagramas de bloques

Diagramas de bloques
Reducción de diagrama de bloques
Reglas del álgebra de los diagramas de bloques
G + -
A AG BAG
B
+ -
A
B
G
G1G
B
GB
A BAG
GA AG
AG
AG
GAG
AG
Diagrama de bloques original Diagrama de bloques equivalente

Diagramas de bloques
Reducción de diagrama de bloques
Reglas del álgebra de los diagramas de bloques
GA AG
A
AG
G1 A
AG
+ -
A B1G
2G
+ -
A B2G 1G
2
1G
Diagrama de bloques original Diagrama de bloques equivalente

Estabilidad de sistemas de control
Nos quedarán dos ecuaciones, una en el numerador y otra en el denominador. La ecuación de denominador se llamará ecuación característica y para estudiar la estabilidad del sistema tendremos que averiguar las raíces de la ecuación caracterítica.
Es la característica más importante de los sistemas de control, se refiere a que si el sistema es estable o inestable.
Definicion.Un sistema de control es estable si ante cualquier entrada acotada, el sistema posee una salida acotada.
Para comprobar la estabilidad de un sistema se tiene analiza la función de transferencia.
)(
)()(
sD
sNsG
Estabilidad de sistemas de control
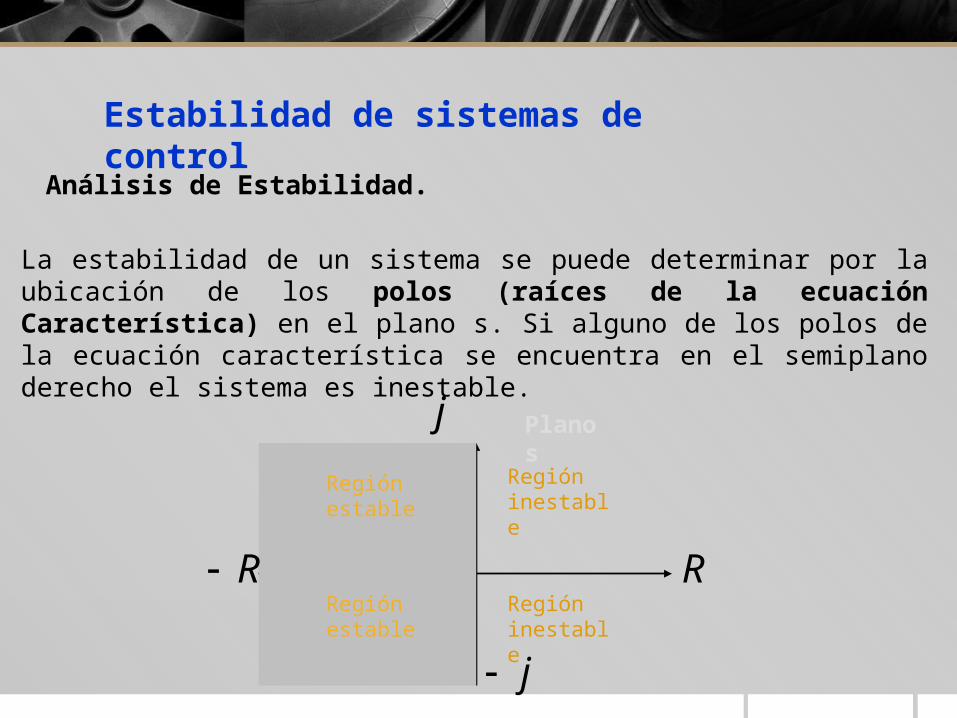
Análisis de Estabilidad.
La estabilidad de un sistema se puede determinar por la ubicación de los polos (raíces de la ecuación Característica) en el plano s. Si alguno de los polos de la ecuación característica se encuentra en el semiplano derecho el sistema es inestable.
Plano s
Región estable
Región inestable
Región estable
Región inestable
RR
j
j










![Unidad II Cinematica y Dinamica[1]](https://img.pdfslide.tips/doc/110x75/577c83ce1a28abe054b65047/unidad-ii-cinematica-y-dinamica1.jpg)


















