Embed Size (px)
Citation preview

21ème
Congrès Français de Mécanique Bordeaux, 26 au 30 août 2013
1
Modélisation d’une chaine de conversion d’énergie éolienne
Basée sur une machine asynchrone à double alimentation.
K. BEDOUDa,b
, R. LAKELb, M. ALI-RACHEDI
c, S. LEKHCHINE
d, T.BAHI
d.
a. Unité de Recherche en Technologies Industrielles URTI/CSC, BP1037, Annaba, Algérie.
b. Laboratoire d’Automatique et Signaux-Annaba, Université Badji Mokhtar, Annaba.
c. Ecole Préparatoire aux Sciences et Techniques -Annaba-
d. Département d’électrotechnique, Université Badji Mokhtar.Annaba.
Résumé :
Actuellement, les éoliennes utilisant une génératrice asynchrone à double alimentation « GADA » sont
les plus utilisées pour production de l’énergie électrique. Notre travail consiste dans la première
étape à la modélisation de la chaine de conversion de l’énergie éolienne où la génératrice asynchrone
à double alimentation fonctionne à vitesse variable. Et, en seconde étape, on considère le réglage des
puissances active et réactive afin d’assurer un fonctionnement optimal. A cet effet, une commande
vectorielle est appliquée pour assurer un découplage entre ses grandeurs électromécaniques. Ces
deux parties, sont développées et programmées sous Matlab/Simulink a fin d’analyser par simulation
le comportement de la chaine dans les différant domaines de fonctionnement possibles. Les résultats
de simulations obtenus seront présentés et analyser.
Abstract:
Currently, the wind using a doubly-fed induction generator « DFIG» are the more used for production
of the electric energy. Our work consists in the first step to modelling of chain of conversion of the
wind energy where the doubly-fed induction generator operates at variable speed. And, in second step,
we consider the regulating of the active and reactive powers in order to ensure an optimum operation.
To this effect, a vectorial control is applied to ensure a decoupling between the electromechanical
variables. These two parts are developed and programmed using Matlab/Simulink in order to analyze
by simulation the behavior of the chain in the areas of possible function. The results of simulations
obtained will be presented and analyzed.
Mots clés: Aérogénérateur - Turbine éolienne - GADA - MLI à bande d’hystérésis.
1. Introduction
L’augmentation des activités industrielles est la cause d’une forte demande mondiale en énergie.
Alors, pour satisfaire cette demande, le monde se dirige vers les sources renouvelables [1]. Parmi ces
sources, l’énergie éolienne a un potentiel énergétique plus important et elle est la première source
d’énergie renouvelable après l’hydraulique [2]. Par conséquent, leurs installations ont augmenté
considérablement dans le monde car en produisant de l’électricité, elles ne propagent pas de gaz à effet
de serre [3]. Actuellement, le système éolien à vitesse variable à base de « GADA » est le plus utilisé
dans les fermes éoliennes. La GADA offre plusieurs avantages: un très bon rendement énergétique,
une bonne robustesse ainsi qu’une facilité d’exploitation et de commande. En plus, elle permet un
fonctionnement sur une plage de vitesse de ± 30 % autour de la vitesse de synchronisme, garantissant ainsi un dimensionnement réduit des convertisseurs statiques [5]. Grâce à ces avantages, cette machine
a suscité beaucoup de curiosité de la part des chercheurs qui ont essayé de développer des stratégies
pour exploiter au mieux ses points forts [6].

21ème
Congrès Français de Mécanique Bordeaux, 26 au 30 août 2013
2
2. Modélisation de la chaine de conversion éolienne La chaîne de conversion éolienne est constituée de la turbine, du multiplicateur et de la GADA.
L’éolienne capte l’énergie cinétique du vent et la convertit en un couple qui fait tourner les pales du
rotor. Par la suite, la GADA transforme la puissance mécanique en puissance électrique.
FIG.1- Configuration d’une éolienne.
2.1 Modélisation de la turbine éolienne
On considère que le système mécanique est caractérisé par la somme de toutes les caractéristiques
mécaniques, on obtient un modèle mécanique comportant deux masses FIG. 2.
FIG.2 - Modèle mécanique simplifié de la turbine.
La puissance disponible du vent traversant une surface S est définie par [7]
3
v Vsρ2
1P (1)
La puissance mécanique de la turbine éolienne est alors :
2
ρ.s.V.CP
3
ptur (2)
Le coefficient de puissance est défini par le ratio de la puissance capté par la turbine sur la puissance
du vent :
v
tur
pP
PC
(3)
L’évolution du Cp dépend de l’angle d’orientation des pales β et de la vitesse spécifique λ :
v
R.Ωλ t
(4)
A partir de relevés réalisés sur une éolienne, l’expression du coefficient de puissance a été approchée,
pour ce type de turbine, par l’équation suivante [8]:
v
Pélec Pt
GADA Multiplicateur
Cmec
Eolienne
Cem
G
Ct
R Ωmec
Ωt
β
β
Jg
Jtur
G
f
Cg
Ctur
Ωtur Ωm

21ème
Congrès Français de Mécanique Bordeaux, 26 au 30 août 2013
3
5
10
15
0
200
400
600
800
0
2
4
6
8
10
x 104
P t
urbi
ne (
KW
)
Vitesse du vent (m/sec)Wr rotorique (rad/sec)
iλ
21
i
p 5)e0,4.βλ
1160,22.(β),(C
(5)
Avec : 1β
0,035.
0,08. βλ
1
λ
13
i
(6)
L’expression du couple aérodynamique est donnée par:
tur
3
p
tur
tur
turΩ
1.
2
ρ.s.V.C
Ω
PC
(7)
La Fig. 4, montre les courbes de la puissance de la turbine en fonction Wr et Vvent. On remarque que
chacune présente à un moment donné un maximum de puissance.
Le multiplicateur est la liaison entre la turbine et le générateur pour adapter la vitesse de la turbine à
celle de la génératrice :
turméc G.ΩΩ (8)
Le frottement, l’élasticité et les pertes énergétiques dans le multiplicateur sont négligés.
méc
tur
C
CG
(9)
L’équation dynamique est modélisée par la relation suivante :
mécr
méc fΩCdt
dΩJ
(10)
Avec : Générateur2
tur JG
JJ (11)
2.2 Modélisation de la machine
La GADA est modélisée en tenant compte des hypothèses simplificatrices suivantes [9]:
- l’entrefer est d’épaisseur de l’entrefer est uniforme ;
- l’effet d’encochage est négligeable ;
- la saturation du circuit magnétique sont négligeables ;
- les résistances des enroulements est constante ;
- la force magnétomotrice est à répartition sinusoïdale.
FIG.3 - Présentation de la puissance en fonction de la vitesse de rotation et de la vitesse du vent.
21ème
Congrès Français de Mécanique Bordeaux, 26 au 30 août 2013
4
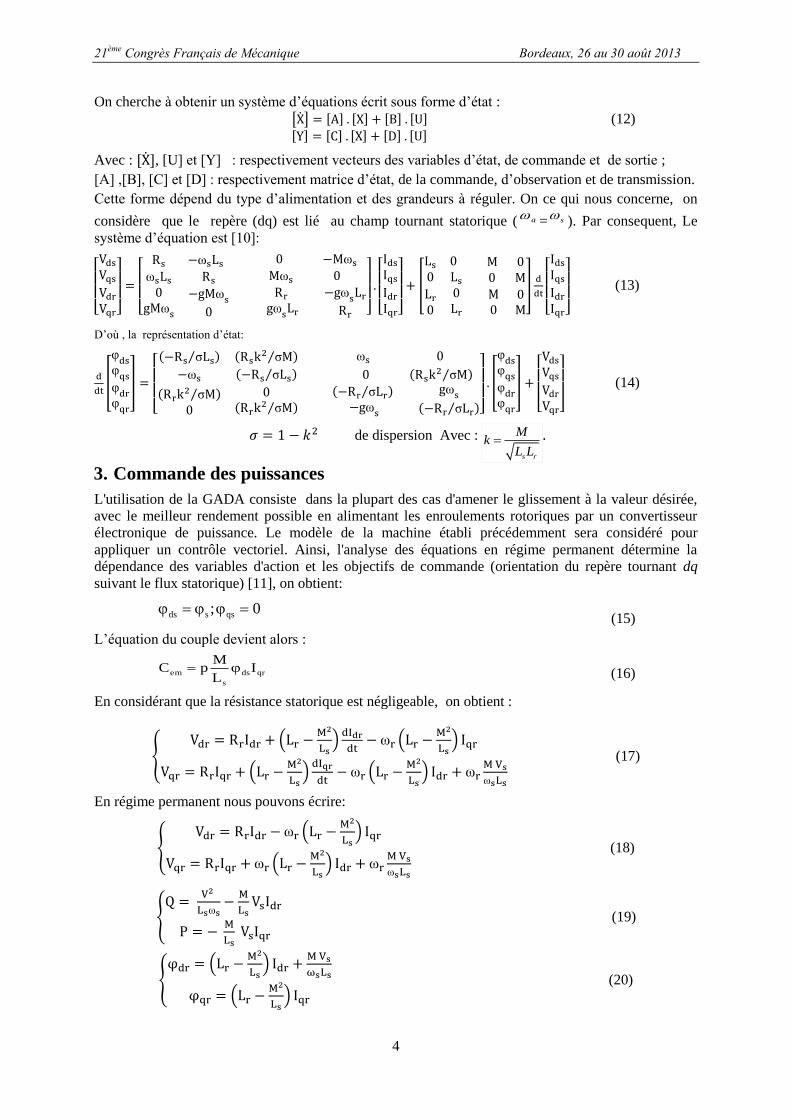
On cherche à obtenir un système d’équations écrit sous forme d’état :
(12)
Avec : , [U] et [Y] : respectivement vecteurs des variables d’état, de commande et de sortie ;
[A] ,[B], [C] et [D] : respectivement matrice d’état, de la commande, d’observation et de transmission.
Cette forme dépend du type d’alimentation et des grandeurs à réguler. On ce qui nous concerne, on
considère que le repère (dq) est lié au champ tournant statorique ( a = s ). Par consequent, Le
système d’équation est [10]:
(13)
D’où , la représentation d’état:
(14)
icient de dispersion Avec :
s r
Mk
L L .
3. Commande des puissances
L'utilisation de la GADA consiste dans la plupart des cas d'amener le glissement à la valeur désirée,
avec le meilleur rendement possible en alimentant les enroulements rotoriques par un convertisseur
électronique de puissance. Le modèle de la machine établi précédemment sera considéré pour
appliquer un contrôle vectoriel. Ainsi, l'analyse des équations en régime permanent détermine la
dépendance des variables d'action et les objectifs de commande (orientation du repère tournant dq
suivant le flux statorique) [11], on obtient:
0; qssds (15)
L’équation du couple devient alors :
qrds
s
em IL
MpC (16)
En considérant que la résistance statorique est négligeable, on obtient :
(17)
En régime permanent nous pouvons écrire:
(18)
(19)
(20)

21ème
Congrès Français de Mécanique Bordeaux, 26 au 30 août 2013
5
(21)
Nous avons opté pour la méthode de compensation des pôles pour la synthèse du régulateur. Ci-
dessous les expressions des coefficients Kp et Ki du régulateur proportionnel intégral.
(22)
Avec:
(23)
4. Simulation et interprétation
Nous avons considéré un vent variable en palier de 6m/ s à 8m/s. Pour la première vitesse, le couple
électromagnétique se stabilise après un régime transitoire à la valeur 1000 rd/s puis lorsque le vent
atteint 8m/s le couple augment pour atteindre 2400 rd/s environ (voir FIG. 4). Il en est de même, la
vitesse régit aussi avec la variation de la vitesse du vent dont la MADA fonctionne en mode
génératrice. La FIG.5 montre les courants des trois phases statoriques ainsi qu’un zoom sur la partie du
changement du vent. Celle de la FIG.5b présente les allures des courants rotoriques. Finalement, la
FIG.6 montre les puissances active et réactive. On constate que les échelons de puissances imposés
par la commande sont bien suivis par la génératrice.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-800
-600
-400
-200
0
200
400
600
800
1000
1200
temps (s)
Coura
nts
au s
tato
r
0.95 0.96 0.97 0.98 0.99 1 1.01 1.02 1.03 1.04 1.05
-500
-400
-300
-200
-100
0
100
200
300
400
500
temps (s)
Courants au stator
a) Courants statoriques
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-7000
-6000
-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
temps (s)
Couple
(N
.m)
a) Couple électromagnétique
FIG. 5- Courants statoriques et rotoriques
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-1000
-500
0
500
1000
1500
temps (s)
Coura
nts
au r
oto
r
b) Courants rotoriques
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-100
-50
0
50
100
150
200
250
300
350
temps (s)
vitesse
b) Vitesse de rotation
FIG. 4 - Couple et vitesse de rotation

21ème
Congrès Français de Mécanique Bordeaux, 26 au 30 août 2013
6
5. Conclusion
A travers les résultats obtenus ; on peut conclure que l’utilisation de la commande en puissance est
bien adaptée pour ce genre de système. Nous avons détaillé présenté la modélisation de la partie
mécanique de l’éolienne prenant en compte les caractéristiques du profil de pales utilisées et l’angle de
calage de celle-ci, ainsi l’ensemble mécanique incluant le multiplicateur. Cette partie est essentielle
dans la conversion éolienne. Finalement, en s’est inspiré de la modélisation de la génératrice
asynchrone à double alimentation pour appliquer une commande séparée des puissances active et
réactive. Cette approche permet de régler le facteur de puissance de l’installation et obtenir par
conséquent, de meilleures performances. La simulation du comportement de toute la chaine nous
aidera par la suite dans la partie commande et régulation.
Références
[1] Nesmat, Abu.Tabak.(2008): Stabilité dynamique des systèmes électriques multimachines :
modélisation, commande, observation et simulation. Ecole centrale de lyon.
[2] L. P. a. K. E, Johnson.(2011): Control of Wind Turbines.IEEE Control system magazine.pp 44 -61.
[3] Aimani, S.El. (2004):modélisation de différentes technologies d’éoliennes intégrées dans un réseau
de moyenne tension. Thèse de doctorat, L2EP de l’école centrale de Lille.
[4] Mirecki, Adam.(2005) : Etude comparative de chaînes de conversion d’énergie dédiées à une
éolienne de petite puissance. Thèse de doctorat de l’institut national polytechnique de Toulouse.
[5] Thierno Lamarana, Sow.(2012) : Commande non linéaire de l’éolienne à MADA pour une
participation au réglage de la fréquence du réseau montréal. École de technologie supérieure université
du québec mémoire présenté à l’école de technologie supérieure.
[6] W. Hofmann, F. Okafor,(2001): Doubly-Fed Full-Controlled Induction Wind Generator for
Optimal Power Utilization. Proceeding of 4th IEEE International Conference on Power Engineering
and Drive Systems, Vol. 1, pp. 355 – 361.
[7] Beltran, B ; Sliding, al.(2008): Mode power control of variable speed wind energy conversion
systems. IEEE Trans. Energy Conversion, vol. 23, n°2, pp. 551-558.
[8] Aguglia, D; Viarouge, P; Wamkeue, R; Cros, J.(2010):Determination of Fault Operation
Dynamical Constraints for the Design of Wind Turbine DFIG Drives. Mathematics and Computers in
Simulation, Vol. 81, N°2, pp. 252 – 262.
[9] Vidal, Paul-Étienne.(2004) :Commande non-lineaire d'une machine asynchrone à double
alimentation. Thèse de doctorat de l’institut national polytechnique de Toulouse.
[10] D. forchetti, G. garcia et M. I. valla, (2002):Vector control strategy for a doubly-fed standalone
induction generator vector . IEEE Trans . Energy conversion, pp: 991-995.
[11] J.L. Rodriguez-Amenedo, S. Arnalte and J.C. Burgos, (2002). Automatic Generation Control of a
Wind Farm with Variable Speed Wind Turbines’, IEEE Transactions on Energy Conversion, Vol.17,
N°2, pp. 279 – 284..
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-5
0
5
10x 10
5
temps (s)
Puis
sance activ
e
a) Puissance active
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-1
-0.5
0
0.5
1
1.5x 10
5
temps (s)
Puis
sance réactiv
e
b) Puissance réactive
FIG.6 - Puissances active et réactive.

![Réalisation d'un calcul de prédiction de rupture p[] · La mécanique de la rupture élastique, basée sur les critères classiques de taux de restitution d'énergie, d'intégral](https://img.pdfslide.tips/doc/110x75/5b9d482609d3f275078c0a9c/realisation-dun-calcul-de-prediction-de-rupture-p-la-mecanique-de-la-rupture.jpg)



























