Embed Size (px)
DESCRIPTION
Se trata de dar una idea de los modelos multiecuacionales en particular los modelos Var con ejemplos para la economía argentina.
Citation preview

6. Modelos VAR.
6.1. Introducción.
Los modelos que hemos considerado hasta aquí son uniecuacionales: en ellos una variable y es explicada por una o varias variables explicativas x o por su historia pasada, los valores de y t-k , k = 1, 2, …, p, o por shocks aleatorios ε t o por una combinación de estas variables. Es decir, hemos considerado modelos de regresión, modelos de series cronológicas del tipo ARMA o ARIMA o una combinación de modelos cuyo propósito fue explicar siempre el comportamiento de una única variable y en función de un conjunto de variables que podemos denominar sintéticamente como regresores. La variable explicada se suele denominar dependiente y a los regresores se los denomina variables independientes del modelo.
Pero estas especificaciones no consideran que una variable puede influir sobre otra y esta a su vez influir sobre aquella, es decir no toma en cuenta el feedback o influencia recíproca entre las variables. Por ejemplo, puede suponerse que el nivel del producto afecta a la inversión y que esta a su vez afecte el nivel de aquel. Si se incorporan estos efectos en el modelo o sea si se permite que haya influencias simétricas entre las variables y que estas influencias puedan extenderse a los valores presentes y pasados de aquellas los modelos son multiecuacionales y se denominan de análisis VAR. Esta abreviatura quiere denotar a un proceso vectorial autoregresivo. Un ejemplo de proceso vectorial autoregresivo de primer orden (porque el rezago máximo entre las variables es uno) con dos variables es:
Se supone que las dos sucesiones { yt } y {z t }son estacionarias y que los términos de
perturbación y son dos procesos de ruido blanco incorrelacionados entre sí cuyos
desvíos estándares respectivos son: y .

Si z t varía en una unidad yt lo hace en - b12 unidades, es el efecto contemporáneo de z t
sobre yt y análogamente – b21 es el efecto contemporáneo de un cambio unitario de yt sobre z t. En términos de nuestro ejemplo sobre el producto y la inversión el modelo supone que los valores actuales y pasados del producto influyen sobre el nivel de inversión y recíprocamente los niveles de esta influyen sobre los valores de aquel. También influyen los valores pasados, en este caso restringidos al período anterior.
Este sistema de ecuaciones se denomina primitivo o estructural y puesto que supone efectos contemporáneos entre las variables no puede ser estimado bajo esa forma, es necesario transformarlo. La transformación se efectúa de manera sencilla si se emplea notación matricial tal como lo hacen prácticamente todos los textos. En particular aquí hemos seguido en gran medida el desarrollo de W. Enders, Applied Econometric Time Series, Wiley, 1995.
El sistema anterior puede escribirse:
Si se hace:
Resulta la ecuación: y premultiplicando por B -1 se tiene:
que puede escribirse: donde:

Esta nueva notación permite escribir el sistema como:
Bajo esta forma el sistema se denomina reducido o estándar.
Se comprueba fácilmente que E ( e t ) = 0 ya que
Además la matriz de varianzas y covarianzas de e t es :
=
=
Esto significa que e1 t y e2 t están correlacionados.

Por otra parte:
=
Esto significa que .Análogamente: .
En síntesis, ni la media, ni las varianzas ni las covarianzas dependen del tiempo, el proceso es estacionario.
6.2. Estabilidad del VAR.
En este punto se pretende contestar la pregunta ¿cuáles son las condiciones que garantizan
que el modelo VAR sea estable, es decir, converja?.
Como se puede escribir: , o bien:
.
Si ahora se reemplaza xt-2 por resulta:

o bien ordenando los términos:
.
Si se efectúan n iteraciones se tendrá:
Para que esta expresión tenga sentido debe anularse para n suficientemente grande. Esto
sucede si las raíces características de A1 son menores que la unidad en valor absoluto. Una breve revisión de los conceptos relacionados con las raíces características de una matriz se puede encontrar en el Apéndice a este capítulo.
6.3.Un ejemplo del VAR.
Con el VAR

donde a10 = a 20 = 0; a11 = a 22 = 0,75 y a12 = a 21 = 0,15 y donde e1t y e 2t son dos sucesiones independientes de ruido blanco normal con varianza unitaria, se generaron 100 observaciones empleando el programa de cómputo Excel 2003.
Las ecuaciones son:
Estas observaciones fueron construidas de la siguiente manera: las dos primeras columnas corresponden a las sucesiones e1t y e 2t y fueron denotadas mediante alea1 y alea2 respectivamente. Los valores se obtuvieron utilizando la siguiente sucesión de comandos: Datos, Análisis de Datos, Generación de números aleatorios, Número de variables 2, Número de observaciones 100, Normal, Media 0, Desvío Estándar 1.
Conviene indicar que si se utiliza el Excel 2007 Análisis de datos se halla en Datos, si se utiliza el Excel 2003 se halla en Herramientas. Análisis de Datos puede ser cargado en el Excel 2003 abriendo Herramientas Complementos y colocando un tilde en Herramientas para Análisis. En el Excel 2007 se carga a partir de Botón de Office Opciones Complementos Herramientas para Análisis Ir y luego colocando un tilde en Herramientas para análisis.
Las columnas correspondientes a y y a z se llenaron de la siguiente manera: en C2 y D2 se colocaron ceros. En C3 se escribió: =0,75*C2+0,15*D2+A3 < Enter>. En D3 se escribió: =0,75*D2+0,15*C2+B3 < Enter>. Luego, se arrastraron las celdas hacia abajo con el mouse. Las series fueron guardadas como planilla de Microsoft Excel 2003 y los primeros datos se presentan a continuación.
alea1 alea2 y z
0 0
-0,30023216 -1,27768317 -0,30023216 -1,27768317
0,24425731 1,27647354 -0,17256929 0,27317634

1,19835022 1,7331331 1,1098997 1,91212997
-2,18358764 -0,23418124 -1,06434337 1,36640119
1,09502253 -1,08670065 0,50172518 -0,22155126
-0,69020416 -1,69043233 -0,34714297 -1,781337
El segundo paso consistió en importar desde el Eviews los datos generados en el Excel. Esto se efectuó mediante los procedimientos corrientes: 1) se abrió un Workfile con 100 observaciones 2) Luego: File Import Read Text-Lotus- Excel y hacer click sobre el nombre de archivo con que fue guardado en el Excel 3) Se abrió el archivo que se deseaba importar 4) se les dio nombre a las variables que se iban a importar, se especificó que las series se disponían en columnas, se indicó el rango de observaciones y se señaló en qué celda comenzaban los datos, en este caso C2.
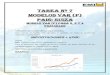
Una vez que los datos fueron importados se graficaron y los recorridos de las series se presentan a continuación. El gráfico sugiere que los procesos son estables en consonancia
con los autovalores de la matriz que son menores que uno en valor absoluto.
En efecto:
Los autovalores son: y .

-6
-4
-2
0
2
4
6
10 20 30 40 50 60 70 80 90 100
Y Z
6.4. Identificación y estimación de los modelos VAR.
El modelo VAR en su versión original o estructural:

no puede ser estimado directamente porque las variables tienen relaciones contemporáneas y los procesos de error están correlacionados con esas variables; como z t explica a y t y
ε z forma parte de z t entonces el proceso de error ε z está relacionado contemporáneamente con y t . Otro tanto ocurre entre ε y y z t . En cambio, puede ser estimada la versión estándar o reducida del VAR :
Sin embargo, el modelo reducido presenta una limitación importante: permite estimar nueve parámetros, los valores de los seis coeficientes a ij , las dos varianzas de los residuos de las regresiones y la covarianza entre e1t y e2t . Esto es insuficiente para identificar el modelo original ya que este contiene diez parámetros, cuatro b ij, cuatro γij, la varianza de ε y
y la varianza de εz . Esto hace que el modelo estructural se halle subidentificado.
Para que el modelo original pueda ser identificado plenamente debe incorporarse una restricción, si se incorporara más de una restricción el VAR original estaría sobreidentificado. Una restricción bastante frecuente es que b 21 es igual a cero en el sistema original lo que implica que yt no tiene efecto contemporáneo sobre zt .
Sin embargo esta restricción o las que se desee formular deben estar fundadas en motivos económicos para que el sistema no sea desnaturalizado.
Por ejemplo, si se suprime b 21 en el sistema primitivo (debido a que las características económicas del modelo así lo requieren) entonces el sistema reducido queda:
donde: , , ,

Estos resultados se obtienen reemplazando por 0 el valor de b 21 en la matriz B. Entonces B
queda: .
A fin de mostrar el procedimiento de estimación con el Eviews se construyeron 100 observaciones con el Excel 2003. El sistema propuesto fue:
donde e1t y e 2t son dos sucesiones independientes de ruido blanco normal con varianza unitaria
En primer término se generaron 100 números aleatorios ubicados en las columnas A y B que fueron denotados como alea 1 y alea 2. Con el cursor colocado en A3 los comandos fueron: Herramientas, Análisis de Datos, Generación de números aleatorios, Número de variables 2, Número de observaciones 100, Distribución Normal, Iniciar con 1234, Media 0, Desvío Estándar 1.
Las columnas correspondientes a y y a z se llenaron de la siguiente manera: en C2 y D2 se colocaron ceros. En C3 se escribió: =2+0,75*C2+0,15*D2+A3 < Enter>. En D3 se escribió: =1+0,75*D2+0,15*C2+B3 < Enter>. Luego, se arrastraron las celdas hacia abajo con el mouse. Las series fueron guardadas como planilla de Microsoft Excel 2003 y los primeros datos se presentan a continuación.
alea1 alea2 y z
0 0
-1,15449211 -2,48375727 0,84550789 -1,48375727
-0,28076101 -0,62105755 2,13080631 -0,60704932
0,53488293 -0,72081548 4,04193026 0,14351848

-0,0849775 0,66804432 4,96799797 2,38197272
-1,15628154 -0,2377999 4,92701284 3,29387934
0,27591113 0,04089998 6,46525267 4,25036141
0,69341013 -1,16724777 8,17990384 3,99031118
-0,37302698 -0,21292522 8,36044758 5,00679375
El segundo paso consistió en importar desde el Eviews los datos generados en el Excel. Esto se efectuó mediante los procedimientos corrientes: 1) se abrió un Workfile con 100 observaciones 2) Luego: File Import Read Text-Lotus- Excel y hacer click sobre el nombre de archivo con que fue guardado en el Excel 3) Se abrió el archivo que se deseaba importar 4) se les dio nombre a las variables que se iban a importar, se especificó que las series se disponían en columnas, se indicó el rango de observaciones y se señaló en qué celda comenzaban los datos, en este caso C2.
El gráfico de las series se presenta a continuación. Se aprecia que aparentan ser estacionarias aproximadamente a partir de la vigésimo quinta observación y que presentan
un recorrido bastante similar. Los autovalores de la matriz que fueron calculados en el
ejemplo anterior son menores que uno en valor absoluto ya que y .

-4
0
4
8
12
16
20
10 20 30 40 50 60 70 80 90 100
Y Z
La estimación de las variables y y z puede hacerse mediante los métodos de mínimos cuadrados ordinarios aplicándolos a cada una de las regresiones. En los dos casos: en el de la regresión de y como en el de la regresión de z, las variables explicativas son comunes a las dos regresiones y son y t-1 y z t-1 . En ambos casos se incorporaron constantes.
Coefficient Std. Error t-Statistic Prob.
C 1.771732 0.365944 4.841541 0.0000
Y(-1) 0.731419 0.056800 12.87704 0.0000
Z(-1) 0.199592 0.060836 3.280801 0.0014
R-squared 0.937880 Mean dependent var 14.97679
Adjusted R-squared 0.936585 S.D. dependent var 3.643462
S.E. of regression 0.917506 Akaike info criterion 2.695519
Sum squared resid 80.81445 Schwarz criterion 2.774159

Log likelihood-
130.4282 Hannan-Quinn criter. 2.727337
F-statistic 724.6927 Durbin-Watson stat 2.026559
Prob(F-statistic) 0.000000
Se puede apreciar que los resultados de la estimación son muy parecidos a los propuestos en el modelo.
En el caso de z los resultados fueron:
Coefficient Std. Error t-Statistic Prob.
C 1.078462 0.394807 2.731621 0.0075
Z(-1) 0.763619 0.065635 11.63440 0.0000
Y(-1) 0.126875 0.061280 2.070407 0.0411
R-squared 0.916180 Mean dependent var 12.03213
Adjusted R-squared 0.914434 S.D. dependent var 3.383988
S.E. of regression 0.989872 Akaike info criterion 2.847352

Sum squared resid 94.06527 Schwarz criterion 2.925992
Log likelihood-
137.9439 Hannan-Quinn criter. 2.879170
F-statistic 524.6585 Durbin-Watson stat 1.794535
Prob(F-statistic) 0.000000
También estos resultados son muy similares a los propuestos en el modelo con el que se generaron las observaciones. El correlograma de los residuos en ambas regresiones mostró que estos eran ruido blanco; se omiten por razones de brevedad.
El modelo estimado, redondeando en dos decimales los coeficientes fue:
Para determinar los coeficientes del sistema estructural hay que utilizar estas estimaciones, las varianzas de cada una de las series de residuos y la covarianza entre ellas y sustituir los valores hallados en las relaciones especificadas más arriba entre los coeficientes del modelo reducido y los del modelo estructural.
La matriz de varianzas y covarianzas de los residuos donde RESI03 denota a e1t y RESI04 a e2t es:
RESI03 RESI04
RESI03 0.816308 0.042116
RESI04 0.042116 0.950154

Como entonces . Además: = y como
se tiene que = - ; esto significa que - 0,042 / 0,95 = -0,044.
Además: .
De , se tiene que 1,77 = es decir: .
También de se puede deducir que: γ11 = 0,724 y de y que
γ12 = 0,167.
El modelo estructural con la restricción puede escribirse entonces como:
De esta forma se pueden apreciar en forma más nítida las interrelaciones del proceso y conocer las influencias contemporáneas entre las variables. Por ejemplo, en la forma reducida el coeficiente de z t-1 es 0,20 y en el modelo estructural ese coeficiente se escinde en 0,167 que le corresponde a z t-1 y 0,044 que le corresponde a z t.
Si el modelo no hubiera sido presentado en su versión estructural la influencia contemporánea de z t sobre y t no habría sido reconocida.
Cabe señalar que la estimación del modelo se podía haber efectuado directamente con el Eviews. A partir de la planilla que incluye la serie de datos agrupada de y y z haciendo click en Proc Make Vector Autoregression Unrestricted Var se obtienen los resultados con dos lags. Sin embargo el programa no permitió reducir el número de lags a uno aun cuando los parámetros correspondientes a los rezagos de orden dos no eran significativamente distintos de cero. Debido a esta limitación las regresiones individuales que hemos

presentado anteriormente permiten mayor flexibilidad y son preferibles a los modelos VAR suministrados por el programa.
Estos resultados se presentan a continuación y excepto que no fue posible reducir el número de lags a uno, los mismos son comparables a los obtenidos anteriormente.
Vector Autoregression Estimates
Date: 12/02/09 Time: 16:14
Sample (adjusted): 3 100
Included observations: 98 after adjustments
Standard errors in ( ) & t-statistics in [ ]
Y Z
Y(-1) 0.714502 0.159786
(0.10399) (0.11094)
[ 6.87095] [ 1.44032]
Y(-2) 0.029979 0.005174
(0.09560) (0.10198)
[ 0.31361] [ 0.05073]
Z(-1) 0.219324 0.862020
(0.09623) (0.10266)
[ 2.27927] [ 8.39717]
Z(-2) -0.032925 -0.139242

(0.09783) (0.10437)
[-0.33654] [-1.33410]
C 1.734775 0.987561
(0.42611) (0.45458)
[ 4.07122] [ 2.17246]
R-squared 0.928897 0.904474
Adj. R-squared 0.925838 0.900365
Sum sq. resids 80.64761 91.78659
S.E. equation 0.931224 0.993455
F-statistic 303.7382 220.1396
Log likelihood -129.5069 -135.8464
Akaike AIC 2.745040 2.874417
Schwarz SC 2.876926 3.006303
Mean dependent 15.10787 12.16111
S.D. dependent 3.419515 3.147337
Determinant resid covariance (dof adj.) 0.854188
Determinant resid covariance 0.769249
Log likelihood -265.2573
Akaike information criterion 5.617496
Schwarz criterion 5.881268

El VAR de primer orden que hemos considerado puede ser extendido tanto aumentando el número de ecuaciones en consonancia con la cantidad de variables que se desee analizar como incrementando el orden de los procesos autorregresivos que se consideren.
Por ejemplo, un VAR bivariado con dos rezagos, es decir de orden dos puede ser escrito:
Mediante transformaciones similares a las presentadas anteriormentre puede ser escrito en forma reducida como:
Este modelo es el que estima por defecto el Eviews en Proc Make Vector Autoregression Unrestricted Var.
También puede ser representado un VAR con n ecuaciones donde cada ecuación contiene n variables con p rezagos cada una. Por ejemplo, en su versión reducida se puede escribir:

Donde denota a los términos constantes de la ecuación, es el polinomio de orden
p en el operador de rezagos L y denota a los términos de perturbación. Los elementos de
las matrices pueden denotarse como .
Para determinar el orden de los rezagos se pueden emplear la razón de verosimilitud, o los criterios de Akaike o Schwarz considerando que en un VAR con n ecuaciones y p rezagos el número total de parámetros estimados es N = n2 * p + n, donde n2 * p son los parámetros que se estiman en la matriz que incluyen los rezagos y el último sumando corresponde a las n constantes del modelo.
6.5. El modelo VMA. Función de respuesta a impulsos.
Un modelo vectorial autoregresivo también puede tener una representación bajo la forma de promedios móviles en cuyo caso se denomina proceso vectorial de medias móviles y se denota mediante VMA. En este modelo y t y z t son influenciadas por los valores presentes y pasados de shocks aleatorios. Generaremos un VMA a partir de un VAR.
El VAR de orden uno en su versión reducida puede ser escrito:
Si ambas ecuaciones son expresadas utilizando el operador de rezagos resulta:

Si en la ecuación de abajo se despeja z t se sustituye este valor en la primer ecuación y luego se despeja y t queda:
De manera similar se puede hallar z t :
Si se consideran valores medios de y t y z t se tiene:
Considerando el resultado hallado en el punto 6.2. Estabilidad del VAR donde este se expresaba como un modelo de medias móviles:
Se puede escribir como solución particular:

Si los et se expresan en función de los εt y recordando que: et = B-1 εt la ecuación anterior se puede escribir:
Y haciendo resulta: .
Esta es la representación MA del VAR, es decir, la representación VMA.
El primer término de se expone a continuación.
Se puede apreciar que el coeficiente - indica el impacto instantáneo que
tiene sobre , en tanto que - indica el impacto instantáneo que tiene
sobre . Otro tanto ocurre con los elementos que resultan del producto de la matriz por
el vector y así siguiendo. Por este motivo a los elementos de la matriz se los
denomina multiplicadores de impacto. Si se suman los elementos apropiados de la matriz
se obtiene el efecto acumulado que los términos de perturbación, los y los en cada
caso, ejercen sobre las variables y , respectivamente.
Si se hace:

Se aprecia que representa el efecto de los sobre y por lo tanto
representa el efecto acumulado sobre , es el multiplicador de largo plazo. Análogamente
representa el efecto de los sobre y también representa el efecto
acumulado sobre .
Cada uno de los cuatro coeficientes van tomando valores a medida que varía i, el
rezago de la perturbación; son considerados como funciones de i y cada uno de esas funciones se denomina función de respuesta a impulsos. El gráfico de cada una de estas
funciones contra i permite apreciar cómo varía la sucesión o según el caso, en
respuesta a los distintos shocks que impactan en las series.
Sin embargo, como se ha visto en el punto 6.4. Identificación y estimación de los modelos VAR el sistema primitivo se halla subidentificado, de manera que es necesario imponer alguna restricción para identificar las respuestas a los impulsos. Esta restricción (si es que
posee sentido económico) puede ser que , lo que significa que no tiene efecto
contemporáneo sobre .
En este caso los términos de error resultan: .
Esto significa que: y que . Si uno conoce la sucesión conoce la
sucesión y con el auxilio de la varianzas de y de y de la covarianza entre las dos
sucesiones, y , se puede hallar el valor de y se pueden obtener las varianzas de
la sucesión , ya que: , y .
Con relación a las restricciones se puede consultar a la obra ya citada de W. Enders, Applied Econometric Time Series, Wiley, 1995.

6.6. Los modelos VARMA.
El modelo VAR ( p) en su versión reducida puede ser escrito:
Donde: y donde las A i son matrices
de coeficientes similares a las que se han considerado hasta aquí.
Si se supone que el proceso de error v t en lugar de ser ruido blanco está autocorrelacionado y que la estructura de correlación posee una representación MA:
donde es ruido blanco y M i son matrices de coeficientes, entonces el
proceso se denomina proceso vectorial autoregresivo y de medias móviles (a veces también proceso vectorial mixto) y se denota mediante la sigla VARMA. Estos procesos exceden los límites de este trabajo y no serán considerados en lo que sigue.
6.7. Causalidad en el sentido de Granger.

En los modelos vectoriales como los que nos ocupan una pregunta que uno se debe formular es si los rezagos de una variable influyen o no sobre alguna otra variable. Si la respuesta es positiva pueden distinguirse dos tipos de influencia: una contemporánea y la otra en la que los valores rezagados de una de ellas anticipa, en el sentido que tiene una cierta relación, con los valores futuros de la otra. Esta relación de precedencia es la que importa con respecto a la causalidad.
En un modelo de dos ecuaciones con p rezagos uno puede querer indagar si los rezagos de z t afectan o no a y t o viceversa. Si la respuesta es afirmativa los parámetros correspondientes a los coeficientes de los términos que incluyen a esos p rezagos deben ser distintos de cero, en caso contrario todos ellos deben ser iguales a cero.
Si todos los parámetros correspondientes a los coeficientes de los términos que incluyen a esos p rezagos son iguales a cero se dirá que z t no causa en el sentido de Granger a y t . Se dirá que sí lo causa si el parámetro que corresponde a algún coeficiente de un término rezagado de z t es distinto de cero.
Si la ecuación contiene un solo rezago y el coeficiente de z t-1 es a 12 , entonces se deberá determinar si a 12 es igual a cero o no. Si la ecuación contiene más de un rezago se deberá determinar si los coeficientes de A 12 ( L )son iguales a cero o no, es decir se debe decidir si: a 12 (1) = a 12 (2) =…..= a 12 (p) = 0 o no.
Si se incluye un solo rezago se trata de una prueba individual en cuyo caso se puede aplicar un test “t” , si se trata de más de un rezago se puede efectuar una prueba “F”. Esta prueba “F” se puede formular como:
Donde: SCR r es la suma de cuadrados de la regresión restringida, SCR n r es la suma de cuadrados de la regresión no restringida, m es el número de restricciones y n es el número de observaciones y k es el número de parámetros estimados en la regresión no restringida.

La causalidad es una condición más débil que la exogeneidad, esta incluye además de los efectos de las variables rezagadas el efecto derivado del valor presente de la variable. En el caso de un sistema VAR bivariado con un solo rezago y t es exógena si no está afectada ni por el valor presente ni por los valores pasados de z t , es decir además de no ser causada en el sentido de Granger por z t tampoco recibe ninguna influencia contemporánea de esta. La idea de exogeneidad se relaciona con la forma en que una variable se comporta con relación a las otras u otra variable del modelo, si su variación es autonóma e independiente de las otras u otra variable del modelo entonces es exógena con respecto a las otras dentro del marco de ese modelo, en caso contrario se la denomina endógena.
6. 8. Un ejemplo de un modelo VAR. Relaciones entre el PBI y la inversión.
Estos modelos son adecuados para conocer las relaciones que hay entre las variables, en este ejemplo se indagará acerca de las influencias recíprocas entre el pbi y la inversión correspondientes al período que abarca desde el I trimestre de 1985 al IV trimestre de 2005. Los datos del pbi a precios de mercado base 1993 = 100, trascriptos por columna, se presentan a continuación.
180408 201912 206256 242215 265025 237417
189025 200890 237072 244468 286412 240361
186481 189269 232797 236566 278473 228596
195457 189575 228817 260752 283566 265402
181770 181943 216370 262167 264556 261535
202700 191778 241872 267020 285275 268561
212564 166291 242646 256388 276768 254330
208023 185125 245132 281770 278092 284376

188626 192868 232945 284092 259200 284392
211615 198211 257477 287515 284796 293467
217420 179818 253468 271702 263127 274595
207753 210052 257342 301208 248865 313927
197623 212476 237968 293315 216849 310593
208841 218103 248094 286268 246315 319939
Los datos correspondientes a la inversión también valuados a precios de mercado base 1993 = 100, trascriptos por columna, son los siguientes:
26289 34982 32649 44020 48384 26714
27497 32855 41667 44565 53304 30388
29313 28934 42734 41460 54758 27659
30634 27209 43650 47591 56019 35024
26511 23664 37325 51558 45938 38707
30267 28074 43956 53327 49232 45248
35004 19186 48221 48511 50995 41571
34507 22633 50776 56800 51843 47908
30839 24014 45580 60489 41580 51702
36399 25661 51527 62390 46196 55936
38771 22442 53182 57077 42220 47159
36619 30152 54637 62699 37002 59863
34347 32225 46129 62903 22719 63851
35418 35537 43400 60443 26311 70961

Las series fueron convertidas en logaritmos y el gráfico de las mismas se presenta a continuación. Loinver se calculó como: loinver = log (inver) y lopbi = log (pbi), donde log denota logaritmos naturales.
9.5
10.0
10.5
11.0
11.5
12.0
12.5
13.0
86 88 90 92 94 96 98 00 02 04
LOINVER LOPBI
Para determinar si las series poseen raíces unitarias se les aplicó el test de Dickey – Fuller, verificándose que el logaritmo de la inversión no posee raíces unitarias, en cambio sí posee lopbi. Sin embargo, si se incorpora una tendencia determinística lopbi tampoco posee raíces unitarias con un nivel de significación de 5%. Los resultados del test aumentado de Dickey Fuller se presentan a continuación.
Null Hypothesis: LOPBI has a unit root
Exogenous: Constant, Linear Trend

Lag Length: 4 (Automatic based on SIC, MAXLAG=11)
t-Statistic Prob.*
Augmented Dickey-Fuller test statistic -3.508375 0.0453
Test critical values: 1% level -4.078420
5% level -3.467703
10% level -3.160627
El VAR requiere que ambas series sean estacionarias de modo que si se incorpora una tendencia determinística se consigue que lopbi lo sea. Esta posibilidad resulta atractiva ya que mantiene la sencillez del modelo evitando transformaciones que pueden dificultar los
cálculos posteriores.
Entonces se estimaron mediante MCO los modelos correspondientes a lopbi y a loinver Después de varias pruebas los dos modelos estimados, uno para cada variable, que podían considerarse satisfactorios ya que sus resultados combinaban criterios de parsimonia, de razonabilidad y de adecuación fueron los siguientes:
Dependent Variable: LOPBI
Method: Least Squares
Date: 12/07/09 Time: 13:54
Sample(adjusted): 1985:3 2005:4
Included observations: 82 after adjusting endpoints
Variable Coefficien Std. Error t-Statistic Prob.

t
C 5.884002 1.037926 5.669001 0.0000
LOINVER(-2) 0.158571 0.037177 4.265315 0.0001
LOPBI(-1) 0.377238 0.106795 3.532349 0.0007
@TREND 0.002444 0.000513 4.762101 0.0000
R-squared 0.871319 Mean dependent var 12.38359
Adjusted R-squared 0.866370 S.D. dependent var 0.158267
S.E. of regression 0.057855 Akaike info criterion -2.814196
Sum squared resid 0.261084 Schwarz criterion -2.696795
Log likelihood 119.3820 F-statistic 176.0507
Durbin-Watson stat 1.970610 Prob(F-statistic) 0.000000
Los residuos de ambas regresiones poseen picos significativos en los rezagos 4, 8 y 12, señal de que las series incluyen factores estacionales y que estos estarán presentes en los resultados quitándole nitidez a las conclusiones. La estacionalidad fue corroborada para ambas series, lopbi y loinver, mediante el Census X12 tanto en la versión multiplicativa como en la aditiva, las que mostraron, en ambos casos, que se trata de estacionalidad estable. Como los análisis con series desestacionalizadas no reflejaron resultados satisfactorios y como por otra parte se comprobó que los factores estacionales eran muy similares para ambas series, se prefirió proseguir las estimaciones con estacionalidad tanto por las razones de sencillez apuntadas como para evitar que las estimaciones fueran poco consistentes.
Dependent Variable: LOINVER
Method: Least Squares
Date: 12/07/09 Time: 13:45
Sample(adjusted): 1985:2 2005:4
Included observations: 83 after adjusting endpoints

Variable Coefficient
Std. Error t-Statistic Prob.
LOPBI(-1) 0.137151 0.065224 2.102787 0.0386
LOINVER(-1) 0.840820 0.076215 11.03216 0.0000
R-squared 0.814452 Mean dependent var 10.59796
Adjusted R-squared 0.812161 S.D. dependent var 0.302587
S.E. of regression 0.131142 Akaike info criterion -1.201270
Sum squared resid 1.393058 Schwarz criterion -1.142984
Log likelihood 51.85269 Durbin-Watson stat 2.289285
El modelo VAR estimado, redondeando los coeficientes en tres decimales, es el siguiente:
Como los valores pasados de una variable afectan a la otra existe entre ambas variables causalidad en el sentido de Granger, una ”causa” a la otra en el sentido de Granger.
Pero de acuerdo con la teoría de la inversión debe pasar un cierto tiempo para que esta madure y, por lo tanto, se puede suponer que la inversión no afecta contemporáneamente al pbi aunque los movimientos de esta variable sí pueden influir contemporáneamente sobre la inversión. Un pbi en crecimiento, por ejemplo, propende a un mejor clima de negocios y sienta las bases para un mejor desempeño de la inversión. De manera que la restricción adicional que se requiere para pasar del modelo reducido al estructural se puede fundar naturalmente en la teoría de la inversión. Esta restricción supone que b12 = 0.

Las ecuaciones son un poco más complicadas que en el caso considerado en el punto 6.4. Identificación y estimación de los modelos VAR ya que se incluyen más parámetros que deben ser estimados, los que corresponden a los rezagos de orden dos y el que corresponde a la tendencia determinística.
Las ecuaciones estructurales son:
Donde w representa a la tendencia determinística.
Estas ecuaciones se pueden escribir en forma matricial con b12 = 0 como:
Si se multiplica por después de efectuar las operaciones resulta:

Mediante transformaciones similares a las presentadas anteriormentre puede ser escrito en forma reducida como:
Donde: yt representa a lopbi, zt denota a loinver, w denota a la tendencia determinística y
, , , , ,
, , , , ,
Además como , y teniendo en cuenta que
y que b12 = 0 resulta: .
Ahora bien, las ecuaciones obtenidas pueden escribirse:

Y la matriz de varianzas y covarianzas de los residuos es:
RESIE1 RESIE2
RESIE1 0.003184 0.006811
RESIE2 0.006811 0.016988
donde RESIE1 denota a e 1t y RESIE2 denota a e 2t .
Como y = 0,003184 resulta - 2,139
Además: = 5,884 así que de: resulta 0 = b20 + 2,139 * 0, luego
b20 = 0.
Como: = 0,377 y se tiene: 0,137 = -(-2,139)* 0,377, o sea
= -0,669.
También: = 0 y Reemplazando sigue que: = 0.
Dado que = 0 y que queda: .
Como = 0,159 y resulta: = - 0,340
Por último: = 0,002 y , entonces : = -0,004
De acuerdo con estos resultados las ecuaciones estructurales pueden escribirse:
Esta última ecuación revela que hay una gran influencia contemporánea del pbi sobre la inversión.

Ejercicio. Compruebe que si se hubiera incorporado la restricción 0 se hubiera
obtenido:
6. 8. Un ejemplo de una función de respuesta a impulsos.
Supongamos que en un problema práctico hemos estimado un modelo VAR bivariado de primer orden, cuya forma es la siguiente:
En el punto 6.5. El modelo VMA. Función de respuesta a impulsos se ha indicado que estas ecuaciones pueden transformarse en:
Donde:

et = B-1 εt
Y haciendo resulta: .
Esta es la representación MA del VAR, es decir, la representación VMA.
También se había señalado que a los elementos de la matriz se los denomina
multiplicadores de impacto
Por ejemplo: representa el efecto de los sobre y análogamente
representa el efecto de los sobre ; los valores de donde j y k son fijos,
representan una función de respuesta a impulsos.
Para presentar un ejemplo se considerará el modelo estimado en el punto 6.4. Identificación y estimación de los modelos VAR donde:
Con la restricción b 21 = 0 se había obtenido el modelo estructural:

Nos detendremos en la obtención de los que representan el efecto de los sobre
.
Las matrices requeridas son:
Así: En esta matriz es el efecto contemporáneo de sobre
. O sea, se modifica en -0,044 por el efecto de un shock aleatorio .
=
En esta matriz es el efecto de sobre .
=
En esta matriz es el efecto de sobre .
=

En esta matriz es el efecto de sobre y así siguiendo.
Los valores:-0.044; -0,003; -0,025; 0,019 muestran la respuesta de a la acción de los
shocks aleatorios ; ; ; ; etc., es decir como reacciona por la acción de los
para i = 0,1,2,3,……
Las operaciones con matrices se pueden efectuar con el Eviews, la “ayuda” o Help de este programa suministra información detallada.
Ejercicio.
En el modelo
cuya matriz de varianzas y covarianzas de e 1t y e 2t es la que se presenta a continuación
RESIE1 RESIE2
RESIE1 0.004567 0.003415
RESIE2 0.003415 0.002698
Donde RESIE1 = e 1t y RESIE2 = e 2t , con la restricción b 21 = 0 obtenga el modelo
estructural, los primeros cuatro valores de e indique su significado. Halle las raíces
características y verifique si el modelo es estable.

Apéndice. Autovalores y Autovectores de una matriz.
Si A es una matriz cuadrada a veces se requiere la solución de una ecuación matricial cuya forma es A x = λ x o lo que es igual ( A - λ I ) x= 0, donde I es la matriz identidad. Los vectores x que cumplen con esa propiedad se denominan autovectores y los valores de λ se denominan autovalores de la matriz.
En esa ecuación, si x ≠ 0, existe una solución que no es trivial si la matriz A - λ I es singular, o sea │ A - λ I│= 0, donde │H│denota el determinante de la matriz H.
Por ejemplo, si y dado que entonces:
resulta: . Las raíces de esta
ecuación, denominada caraterística, son -1 y .
Los autovectores de la matriz A se hallan reemplazando λ en la ecuación ( A - λ I ) x por
las raíces de la ecuación característica. Para la raíz 1 se tiene:
Es decir, .
Para la raíz resulta: . En este caso .
Si ahora se normalizan los vectores ( haciendo que su longitud sea igual a 1) es decir,
, entonces como para el primer vector , se tiene: o bien
en tanto que . El primer autovector es .

Para el segundo vector es o bien , es decir en tanto que
. El segundo autovector es .
Cuando el rango de la matriz es superior a dos, resulta complicado hallar los autovalores y autovectores de una matriz, pero con el Eviews el problema se puede resolver fácilmente el problema para una matriz simétrica.
Por ejemplo, se hallarán los autovectores y los autovalores de la matriz simétrica A:
1.000000 2.000000 4.000000
2.000000 3.000000 2.000000
4.000000 2.000000 5.000000
Para cargar los datos se abre un Workfile y se hace click en Object New Object Matrix, se indican 3 filas y 3 columnas y que se trata de una matriz simétrica. Cuando se da Enter aparece una matriz 3*3. Se hace click en Edit y se cargan los datos. Se le da nombre a la matriz, por ejemplo sym01.
Luego se debe obtener un vector donde guardar los datos. Este vector se genera de manera análoga a la empleada para obtener la matriz, es decir: Object New Object Matrix, se indican 3 filas y 1 columna y se le da nombre, por ejemplo matrix02. Se escribe: matrix02=@eigenvalues(sym01). El programa genera los autovalores en matrix02. En este caso los autovalores fueron: -1.584803; 1.794590 y 8.790213.
Los autovectores se obtienen en forma similar. Se debe generar una matriz para guardar los vectores, esto se hizo mediante Object New Object Matrix, indicando 3 filas y 3 columnas

y se la llamó matrix03. Luego se escribió: matrix03=@eigenvectors(sym01). Los autovectores aparecen a continuación. Deben leerse por columna.
-0.864279 -0.075893 0.497254
0.170599 0.885736 0.431704
0.473199 -0.457944 0.752576
En general una matriz n*n posee n autovalores que pueden ser distintos. Una matriz 2*2 posee dos autovalores, una 3*3 posee 3 autovalores y así siguiendo.
El determinante de una matriz cuadrada es igual al producto de sus autovalores. Es decir:
En el ejemplo el determinante de la matriz simétrica A es: -1.584803* 1.794590 * 8.790213 = 25.
Por otra parte, los autovectores de una matriz A correspondientes a distintos autovalores son linealmente independientes y como el rango de una matriz es el número de filas ( o columnas) linealmente independientes sigue que el rango de una matriz A es el número de raíces características distintas de cero.


![Modelos de ecuaciones múltiples modelos Var y Cointegración · SIMULACIÓN DE MODELOS VAR 83 ... Este tipo de restricciones han sido subrayadas en especial por[Sims] y por [Evans-SavinI],](https://img.pdfslide.tips/doc/110x75/5bd576a309d3f26c3e8babf0/modelos-de-ecuaciones-multiples-modelos-var-y-cointegracion-simulacion-de.jpg)