Embed Size (px)
DESCRIPTION
perlu anda pelajari ini
Citation preview
PERCOBAAN IKARAKTERISTIK KECEPATAN MOTOR VS MASUKAN
1.1. Tujuan : Menentukan karakteristik hubungan kecepatan motor terhadap masukan
1.2. Alat yang digunakan : Modul U-154, U-155, U-156, U-157, U-159, U-161
1.3. Teori DasarMotor DC memiliki kumparan jangkar yang dihubungkan ke komutator dan
kutub magnet dan dieksitasi oleh sumber DC atau sumber dengan magnet tetap. Torsi mekanik dibangkitkan dari motor ini saat arus mengalir melalui kumparan. Rangkaian magnet yang digunakan dalam motor DC pada ED-4400 adalah magnet tetap (medan magnet yang tetap).
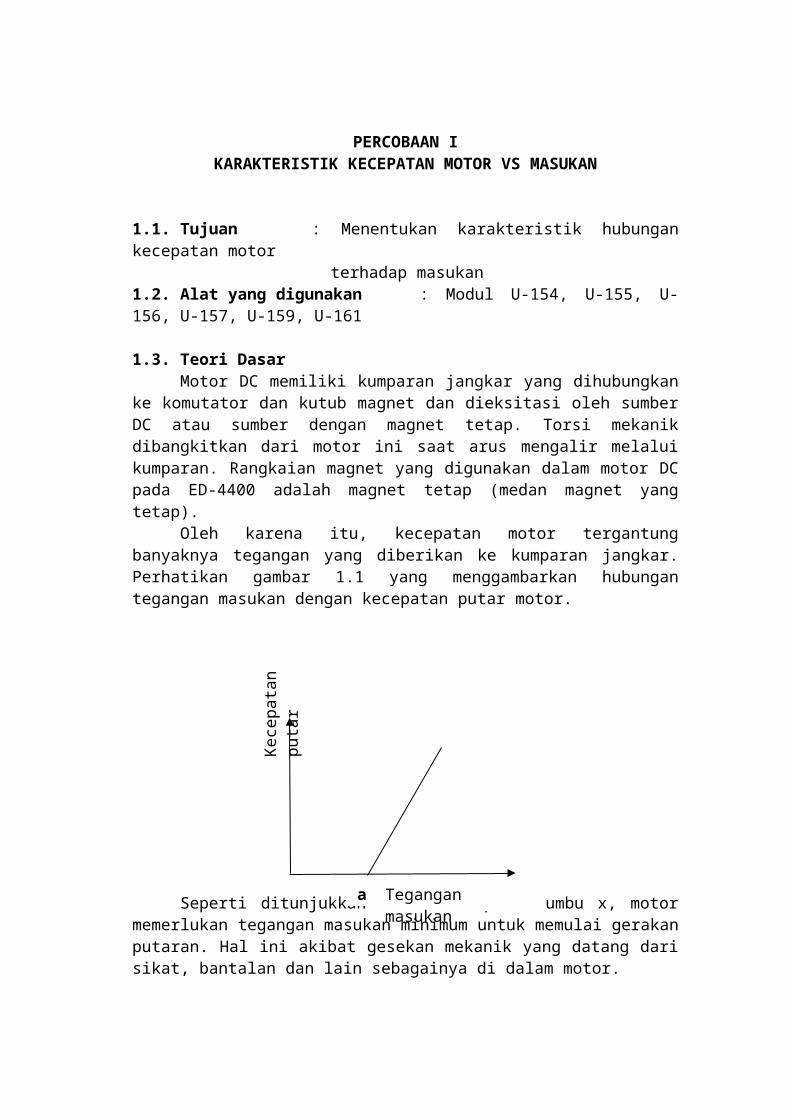
Oleh karena itu, kecepatan motor tergantung banyaknya tegangan yang diberikan ke kumparan jangkar. Perhatikan gambar 1.1 yang menggambarkan hubungan tegangan masukan dengan kecepatan putar motor.
Seperti ditunjukkan titik “a” pada sumbu x, motor memerlukan tegangan masukan minimum untuk memulai gerakan putaran. Hal ini akibat gesekan mekanik yang datang dari sikat, bantalan dan lain sebagainya di dalam motor.
Kenaikan tegangan masukan akan meningkatkan besar arus kumparan dan selanjutnya menyebabkan bertambahnya kecepatan putar motor. Gaya elektro-mekanik pada kumparan jangkar juga akan bertambah ketika kecepatan makin besar dan akhirnya motor mencapai titik jenuh yang artinya kenaikan tegangan tidak akan meningkatkan besar kecepatan putar motor.
Motor dalam sistem ini dikemudi oleh penguat kemudi motor U-154. Kontrol tegangan masukan diperoleh melalui attenuator U-151. Kecepatan motor, dalam RPM, ditunjukkan oleh alat ukur U-159 dengan mendetaksi keluaran tacho-generator.
Kec
epat
an p
utar
Tegangan masukana
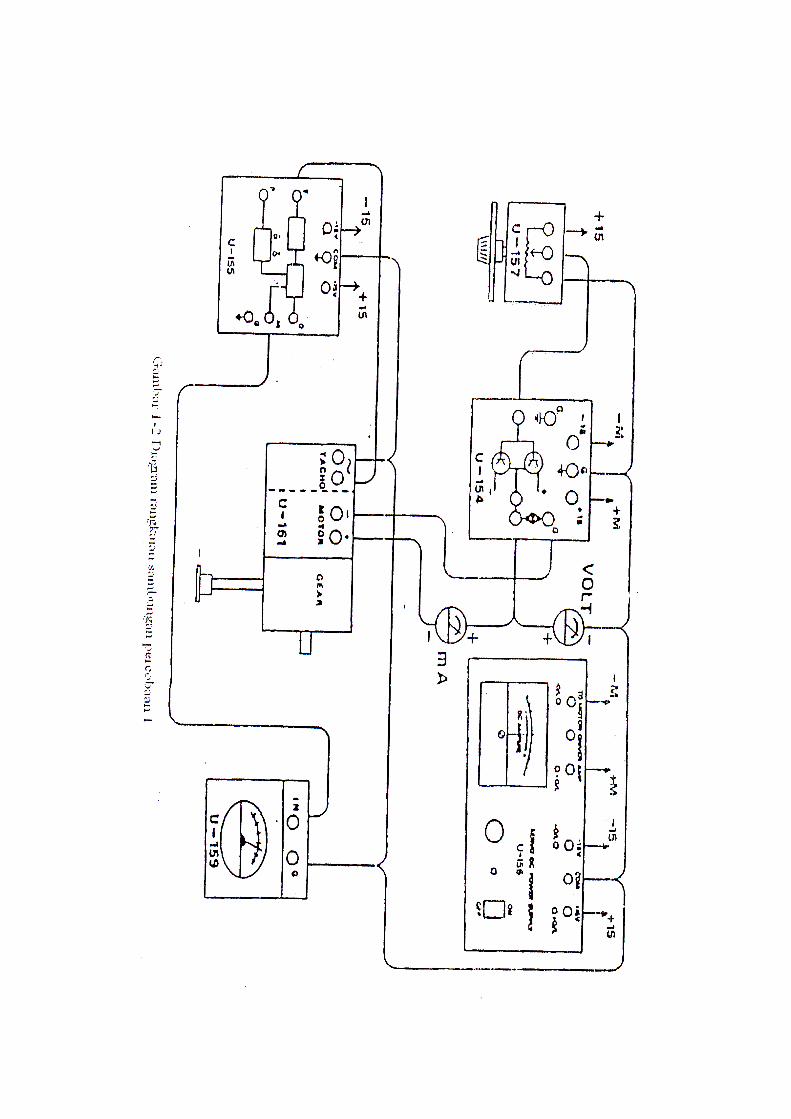
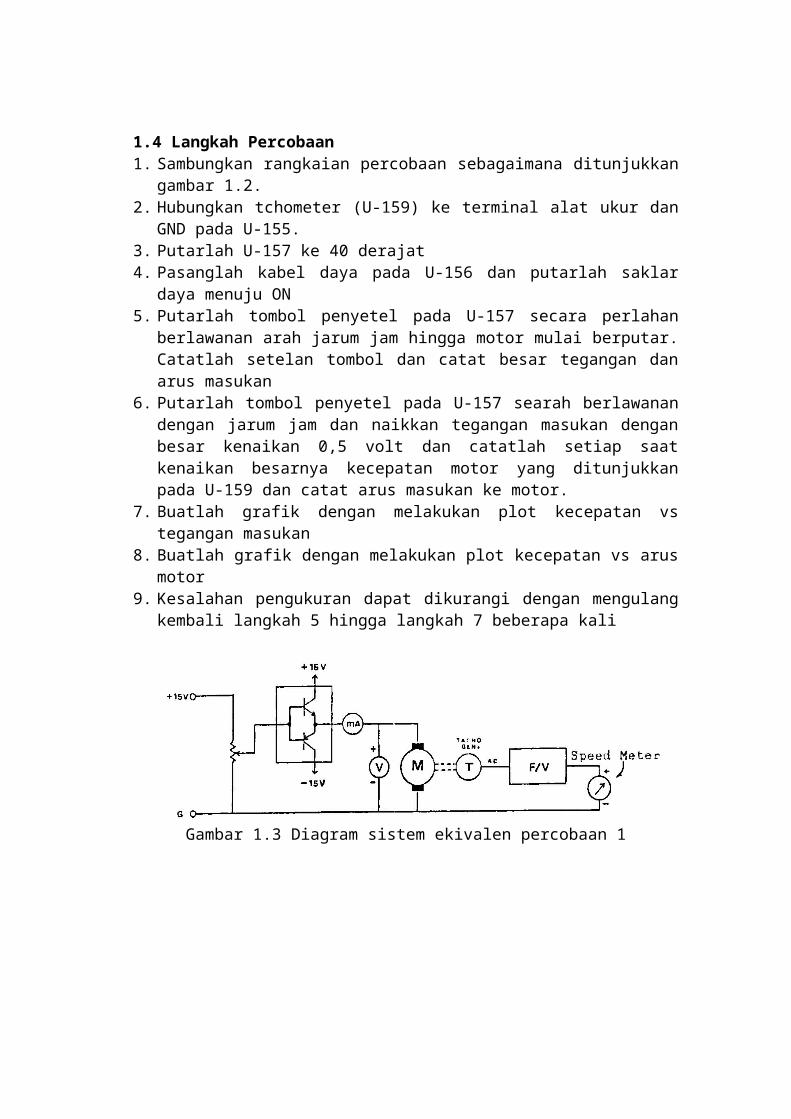
1.4 Langkah Percobaan1. Sambungkan rangkaian percobaan sebagaimana ditunjukkan gambar 1.2.2. Hubungkan tchometer (U-159) ke terminal alat ukur dan GND pada U-155.3. Putarlah U-157 ke 40 derajat4. Pasanglah kabel daya pada U-156 dan putarlah saklar daya menuju ON5. Putarlah tombol penyetel pada U-157 secara perlahan berlawanan arah jarum jam
hingga motor mulai berputar. Catatlah setelan tombol dan catat besar tegangan dan arus masukan
6. Putarlah tombol penyetel pada U-157 searah berlawanan dengan jarum jam dan naikkan tegangan masukan dengan besar kenaikan 0,5 volt dan catatlah setiap saat kenaikan besarnya kecepatan motor yang ditunjukkan pada U-159 dan catat arus masukan ke motor.
7. Buatlah grafik dengan melakukan plot kecepatan vs tegangan masukan8. Buatlah grafik dengan melakukan plot kecepatan vs arus motor9. Kesalahan pengukuran dapat dikurangi dengan mengulang kembali langkah 5
hingga langkah 7 beberapa kali
Gambar 1.3 Diagram sistem ekivalen percobaan 1
PERCOBAAN IIKARAKTERISTIK KECEPATAN MOTOR VS BEBAN
2.1 Tujuan : Menentukan karakteristik hubungan antara kecepatan terhadap beban
2.2. Alat yang digunakan : Modul U-151, U-153, U-154, U-155, U-156, U-157, U-159, U-1612.3 Teori Dasar
Daya nominal dari suatu motor DC magnet tetap memiliki jangkauan beberapa watt hingga hampir sekitar seratus watt. Motor jenis seperti ini memiliki efisiensi yang relatif tinggi.
Fluks magnet dalam motor ini berharga tetap karena memiliki magnet tetap sebagai kutub magnet. Oleh karena itu torsi motor sebanding dengan arus masukan pada kumparan jangkar. Tegangan ellektromekanik balik (emf) sebanding dengan kecepatan motor pada saat yang bersamaan.
Hubungan diatas pada motor ditetapkan sebagaimana dibawah iniK = tetap 2-1Ea = K m 2-2T = KIa 2-3
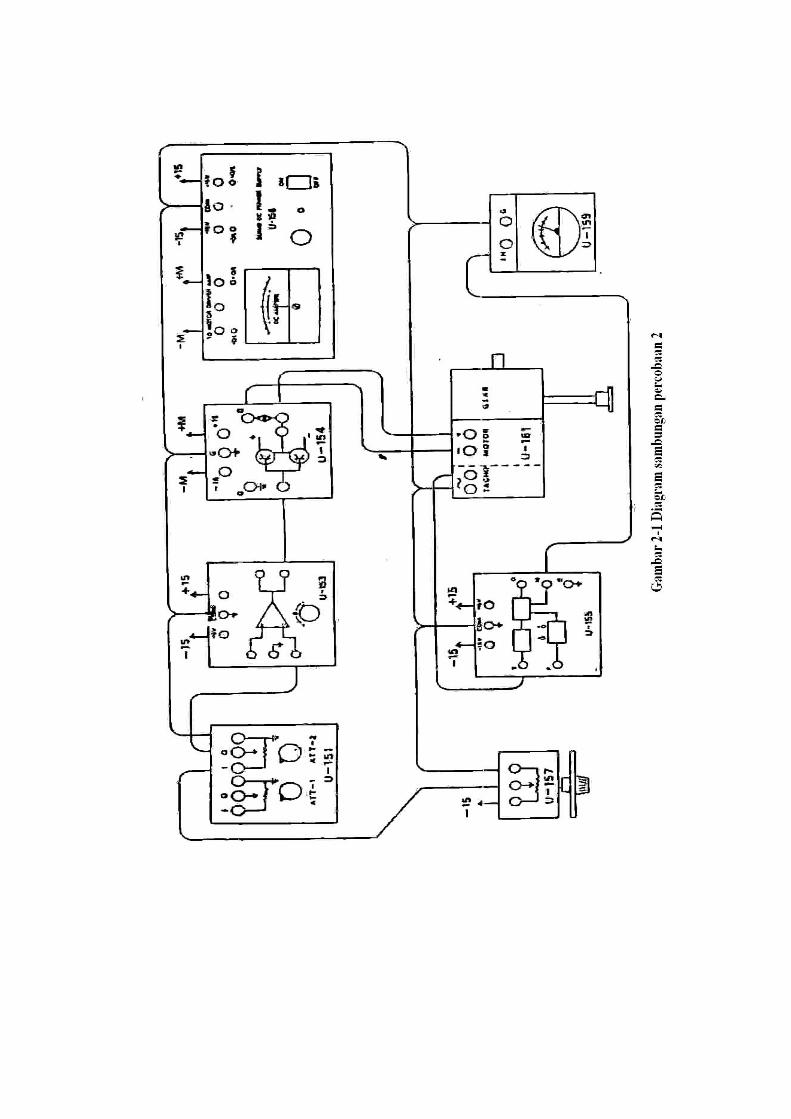
Dengan K = fluks magnet dari magnet tetapEa = Tegangan elektro magnet balik dalam voltm = Kecepatan putar motor dalam rad/detT = torsi dalam N.mIa
= arus masukan dalam ampere Hubungan antara tegangan masukan dan arus masuan dan antara kecepatan dan torsi diuraikan sebagaimana dibawah ini
Vt = Ea + RaIa (V) 2-4m = Vt/ K - RaT/( K)2 2-5
denganVt = tegangan masukan dalam voltRa = resistansi kumparan jangkar
Dari persamaan diatas terlihat bahwa pada tegangan masukan tertentu, saat torsi atau beban meningkat, maka kecepatan motor akan berkurang. Juga, ketika torsi bertambah, maka banyak arus akan melewati kumparan. Hubungan antara kecepatan motor dan beban diperlihatkan gambar 2.2.

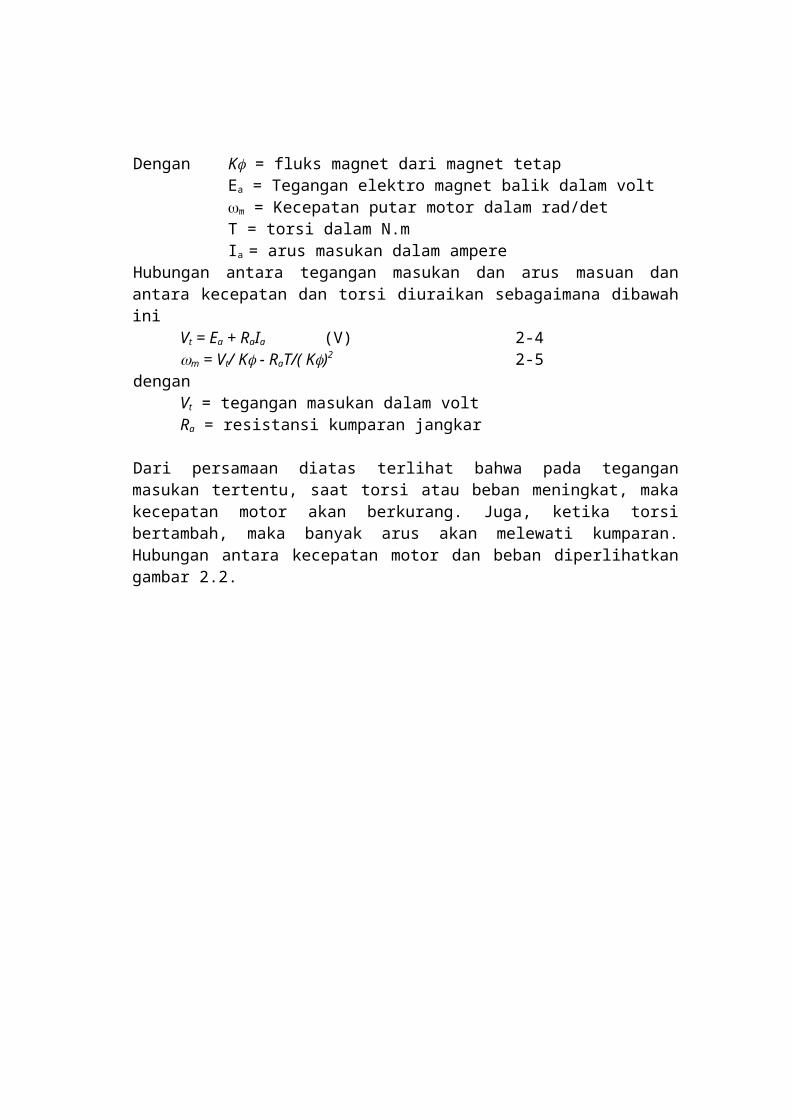
2.4 Langkah Percobaan1. Merangkai rangkaian percobaan seperti gambar 2.12. Setel atteneuator pada U-151 pada posisi “8”. Putarlah saklar daya ke posisi ON.
Aturlah penyetel U-157 mulai dari 450 berlawanan jarum jam sehingga U-159 menunjukkan kecepatan 2500 RPM. Pastikan motor tidak dalam keadaan jenuh.
3. Naikkan posisi rem pada roda kecepatan tinggi U-161 dari 0 dengan kenaikan satu langkah dan catatlah RPM pada U-159 dan arus motor pada U-154
4. Kurangi posisi rem dari 10 dengan penurunan satu langkah dan catatlah RPM U-159 dan arus motor U-156
5. Menggunakan data yang diperoleh pada langkah 3 dan 4, buatlah grafis posisi rem vs tegangan keluaran dan posisi rem terhadap arus.
6. Dari hasil ini plot tegangan tachometer dan arus terhadap setting skala posisi rem
PERCOBAAN IIIRESPON TRANSIEN MOTOR DC
3.1 Tujuan : Menentukan karakteristik respon transien motor DC.
3.2. Alat –Alat Yang Digunakan : Modul U-151, U-153,U-154 , U-155 , U-156 , U-159 , U-161 ,U-162 ,
Osilaskop
3.3. Teori DasarPada percobaan terdahulu, kita telah memberikan tegangan masukan ke
motor secara perlahan dan menghasilkan tanggapan motor terhadap masukan tanpa distorsi. Apabila masukan tegangan berupa tegangan langkah (step function), maka tanggapan motor DC dapat berupa tanggapan dengan karakteristik eksponensial.
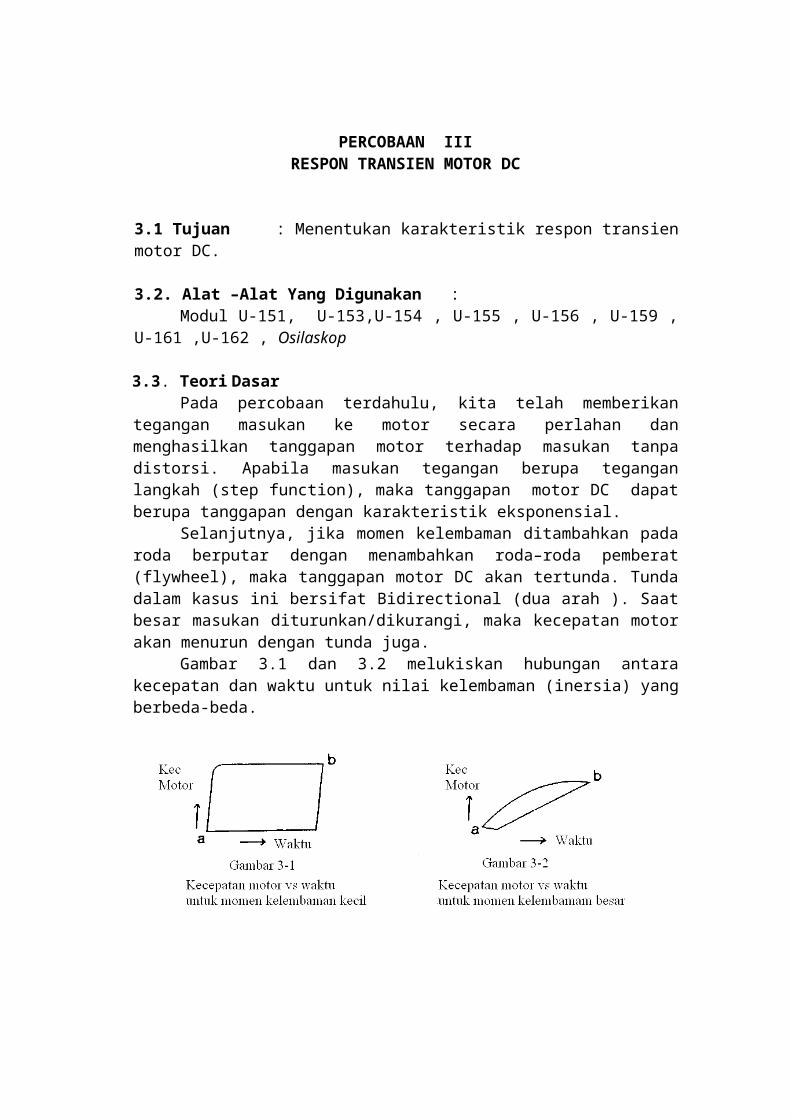
Selanjutnya, jika momen kelembaman ditambahkan pada roda berputar dengan menambahkan roda–roda pemberat (flywheel), maka tanggapan motor DC akan tertunda. Tunda dalam kasus ini bersifat Bidirectional (dua arah ). Saat besar masukan diturunkan/dikurangi, maka kecepatan motor akan menurun dengan tunda juga.
Gambar 3.1 dan 3.2 melukiskan hubungan antara kecepatan dan waktu untuk nilai kelembaman (inersia) yang berbeda-beda.
Karateristik keluaran seperti diatas diperoleh pada osiloskop saat ada masukan ke motor dan ke osiloskop (X –input ) berbentuk gambar 3.3

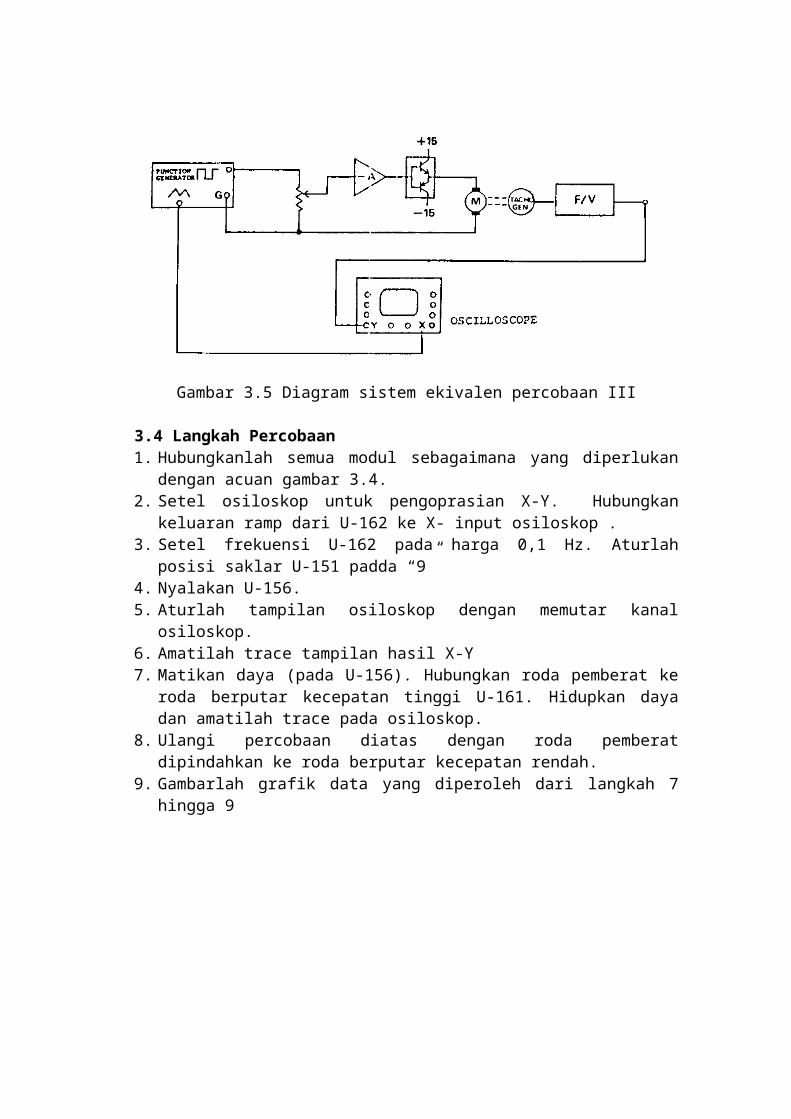
Gambar 3.5 Diagram sistem ekivalen percobaan III
3.4 Langkah Percobaan1. Hubungkanlah semua modul sebagaimana yang diperlukan dengan acuan gambar
3.4.2. Setel osiloskop untuk pengoprasian X-Y. Hubungkan keluaran ramp dari U-162
ke X- input osiloskop .3. Setel frekuensi U-162 pada harga 0,1 Hz. Aturlah posisi saklar U-151 padda “9”4. Nyalakan U-156.5. Aturlah tampilan osiloskop dengan memutar kanal osiloskop.6. Amatilah trace tampilan hasil X-Y7. Matikan daya (pada U-156). Hubungkan roda pemberat ke roda berputar
kecepatan tinggi U-161. Hidupkan daya dan amatilah trace pada osiloskop. 8. Ulangi percobaan diatas dengan roda pemberat dipindahkan ke roda berputar
kecepatan rendah.9. Gambarlah grafik data yang diperoleh dari langkah 7 hingga 9
PERCOBAAN IVKONTROL KECEPATAN LUP TERTUTUP
4.1 Tujuan : Mempelajari dasar kontrol kecepatan rangkaian tertentu untuk mengetahui sinyal kesalahan dan mekanisme umpan balik 4.2 Alat –alat Yang Gigunakan:
Modul UnitU -151 ,U-153 ,U-154, U-155, U-156 ,U-157, U-159 ,U-161.
4.3 Dasar TeoriSeringkali keperluan yang muncul dalam aplikasi motor DC adalah
mempertahankan besar kecepatan motor DC pada harga yang tetap meskipun terjadi perubahan beban.
Pada sistem kontrol kecepatan lup tertutup, sinyal kesalahan yang terjadi akibat perbedaan kecepatan yang diinginkan dan kecepatan motor aktual dapat ditentukan dan diketahui pada setiap saat. Sinyal kesalahan ini akan diperkuat dan mengumpan balikan ke masukan untuk memberikan aksi balik ke keluaran.Sistem dengan mekanisme umpan balik ini disebut sistem lup tertutup. Pada percobaan terdahulu, sistem tanpa umpan balik sehingga disebut sistem lup terbuka. Gambar 4-1 menggambarkan perbedaan yang mendasar antara dua sistem ini.
Kita dapat melihat bahwa sistem dengan umpan balik kecepatan akan menanggapi pemberian beban terhadap sinyal kesalahan .
Pada sistem umpan balik, sangat penting untuk menguatkan sinyal kesalahan. Dalam sistem yang kita miliki ini, harus ada penguatan yang cukup terhadap sinyal kesalahan sebelum sinyal ini menuju U- 154 sebagai pengemudi servo . Penguatan yang tidak cukup akan menghasilkan keadaan “ dead band” yang mana kontrol otomatik tidak dapat menyelesaikannya.

4.4 Langkah Percoban1. Dengan mengacu gambar 4.2, hubungkan semua modul yang diperlukan. 2. Aturlah saklar pemilih (selektor) rangkaian pada U-152 ke posisi “a”3. Aturlah ATT-2 pada U-151 ke posisi 10. Hal ini akan menjaga keluaran tacho
dari terjadinya penguatan. Setel ATT-1 ke 54. Hidupkan U-156.5. Putarlah U-157 sehingga kecepatan motor menjadi setengah dari kecepatan
maksimum ( keadaan ini ekivalen dengan 2500 RPM pada U-159 ).6. Naikkan setelan rem (magnetic brake) dengan kanaikan satu setiap saat dan
catat kecepatan RPM pada U -159.7. Catatlah tegangan kesalahan sebagai fungsi seting rem. Perhatian : Pada titik ini,
tidak ada umpan balik (ATT-2 disetel ke 10) dan oleh karena itu, tegangan kesalahan akan tergantung pada variasi masukan
8. Kurangi ATT-2 ke 5. Aturlah U-157 untuk mendapatkan kecepatan yang sama pada langkah 5 (2500 RPM)
9. Ubalah pengatur rem ( U-156 ) pada setiap saat, catatlah nila pada alat ukur kecepatan dan tegangan kesalahan yang terjadi. Bautlah grafik kecepatan vs rem dan tegangan kesalahan vs kecepatan
10. Setel ATT-2 ke posisi 0. Atur kembali U-157 untuk menjaga kecepatan yang sama
11. Ulangi langkah 912. Bandingkan hasil dari langkah 3 7 (lup terbuka) dengan hasil yang diperoleh
melalui langkah 8 9 dan 10 11 (lup tertutup)
PERCOBAAN VPENGUATAN SISTEM VS KONTROL KECEPATAN
5.1 Tujuan : Menentukan hubungan antara penguatan sistem terhadap kontral kecepatan
5.2 Alat – Alat Yang Digunakan : Modul Unit :
U-151,U-152,U-153,U-154,U-155,U-156,U-157,U-159,U-161. Osiloskop .
5.3 Teori DasarDasar kontrol motor lup tertutup ditunjukkan gambar 5.1. Saat tegangan
masukan ( kadang disebut tegangan acuan) diterapkan ke amplifier maka motor mulai berputar menuju RPM tertentu yang dapat berbeda dengan nilai yang diinginkan .Generator tacho yang secara mekamis di pasang pada motor mulai menghasilkan sinyal AC yang sebanding dengan besar RPM. Sinyal AC tersebut dirubah menjadi tegangan DC dan tegangan DC tersebut diumpankan kembali pada amplifier tambahan sebagai sinyal umpan balik .Sinyal umpan balik bersama dengan tegangan input akan menghasilkan suatu sinyal kesalahan yang diperkuat yang selanjutnya diterapkan pada motor .Proses ini berlanjut sampai kecepatan motor mencapai RPM yang diinginkan. Untuk mengubah kecepatan motor , maka tegangan masukan harus dirubah juga.
Gambar 5.1 Lup umpan balik dasar untuk kontrol kecepatan
Kecepatan motor sebagai suatu fungsi sinyal kesalahan dinyatakan sebagai sistem idiel berikut ini :
o = K. E (5-1)Dengan
o = Kecepatan MotorK = Penguatan SistemE = Sinyal Kesalahan

Sinyal kesalahan ( error ) adalah suatu fungsi sinyal masukan dan keluaran tacho .E = Vref – Kgo (5-2)
Dengan Vref adalah sinyal referensi atau sinyal masukan pada penguat penjumlah.Kg adalah konstanta generator tacho dan Kgo menunjukkan keluaran tegangan pada generator tacho.Dari persamaan (5-1) dan (5-2) maka :
o = K( Vref – Kgo) (5-3)o = KVref –K. Kgo
(5-4)
Jika K >>1 maka
(5-5)
Persamaan di atas jelas meyatakan bahwa jika perolehan sistem lebih besar dari 1, maka kecepatan motor merupakan suatu fungsi hanya dari tegangan masukanHubungan antara kesalahan dan perolehan didapatkan dengan cara yang serupa :
E = Vref – Kg. K. E (5-6)
(5-7)
Persamaan (5-7) menunjukkan bahwa tegangan kesalahan dapat dikurangi jika penguatan sistem dinaikkan. Dalam sistem servo, hal ini artinya bahwa luas deadband menjadi lebih sempit ketika pengutan dibesarkan sehingga fluktuansi kecepatan diperkecil sesuai luas jangkauan dari perubahan beban.Tetapi, terlalu besar penguatan sistem akan berakibat kurang baik. Penguatan yang terlalu besar menyebabkan kecepatan motor berubah tidak beraturan .Sehingga pengutan sistem harus dimaksimalkan tanpa menyebabkan situasi penguatan yang berlebihan.
Hubungan diatas dapat simpulkan pada gambar 5.2.

Gambar 5.2 Hubungan antara beban , sinyal kesalahan dan kecepatan
Dalam gambar 5.4, U-155 menyediakan sinyal DC yang sebanding dengan besar kecepatan motor. Keluaran yang cukup dari U-155 adalah sangat penting untuk menjaga kecepatan yang tetap. Penyetelan penguatan U -153 adalah sangat penting juga, dengan penguatan sistem yang terlalu rendah akan melambatkan respon dari sistem sedangkan penguatan yang terlalu tinggi akan mengakibatkan sistem tidak stabil.
Gambar 5.3 Diagram sistem ekivalen untuk percobaan V
Beban
Sinyal kesalahan
Sinyal kesalahan
kecepatan
beban
5.4. Langkah Percobaan1. Dengan mengacu gambar 5.4, rangkaian modul yang diperlukan2. Setel pemilih rangkaian pada U-152 ke posisi “a”3. Buatlah ATT-1 pada U-151 pada posisi 9 (sinyal masukan minimum) dan ATT2
posisi 10 (tak ada umpan balik)4. Hidupkan U-156. Aturlah U-157 sehingga motor tetap berada pada kecepatan
mendekati 2500 RPM5. Naikkan penyetelan rem satu kenaikan pada tiap saat dan ukur kecepatan motor
dan sinyal kesalahan pada tiap setelan rem6. Ubah setelan ATT-2 pada posisi 5. Jaga kecepatan motor yang sama (2500
RPM). Ubah-ubahlah penyetelan rem dan ukur kecepatan motor dan sinyal kesalahan tiap penyetelan rem. Buatlah grafik yang menunjukkan hubungan antara penyetelan rem , kecepatan motor dan sinyal kesalahan.
7. Dengan posisi ATT-2 pada 5, ubahlah ATT-1 dari 0 hingga 9 dan ukurlah tegangan kesalahan pada setiap saat. Jaga kecepatan motor pada 2500 RPM (aturlah U-157 jika diperlukan). Gambarlah grafik yang menunjukkan tegangan kesalahan vs posisi ATT-1 (lihat gambar 5-5a )
8. Ulangi langkah 7, tetapi pada saat ini, hentikan motor sesaat dengan memegang roda putar dengan tangan pada setiap posisi ATT-1. Ukurlah tegangan kesalahan dan buatlah grafik yang menunjukkan rasio tegangan kesalahan sebagai fungsi ATT-1 dengan rasio tegangan kesalahan didefinisikan sebagai
Lihat gambar 5.5b.
Gambar 5.5 Grafik yang dibentuk pada langkah 7 dan langkah 8