Embed Size (px)
Citation preview

MODULE DES SCIENCES APPLIQUÉES
Relevé dimensionnel automatisé des plaques
PROJET D’ÉTUDES EN INGÉNIERIE DANS LE CADRE DU
PROGRAMME EN GÉNIE ÉLECTROMÉCANIQUE
Présenté par : Mohammed Sehli
Sedik Bendaoud
Superviseur: Walid Ghié, professeur (UQAT), Ph. D., ing,Jr
Représentant industriel : Guillaume Marquis, Directeur général (Métal-Marquis), ing.
26 Août 2009

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud ii
REMERCIEMENTS
La réalisation de ce projet est le fruit d’un travail assidu et régulier des auteurs de ce rapport
durant toute la session d’été. Les résultats obtenus ont apporté une grande fierté à l’équipe,
ainsi qu’une expérience considérable dans le milieu industriel. Cette première réalisation de
projet d’une telle envergure doit ses résultats à plusieurs intervenants; l’équipe tient à présenter
ses remerciements envers ces personnes, qui ont beaucoup apporté à ce projet.
Tout d'abord, les remerciements sont destinés aux personnes qui sont les plus proches des
étudiants et qui les ont épaulés malgré la distance qui les sépare d’eux, ils sont le fruit de leurs
éducations et de leurs orientations. Les parents des étudiants ont été d’un grand soutien durant
la réalisation de ce projet, et ils ne manquaient pas d’apporter leur aide dans le cadre de leurs
connaissances.
Merci au professeur superviseur Monsieur WALID GHIÉ qui a fait part de son expertise et son
talent tout le long du projet ce qui pour l’équipe a été très instructif.
Les remerciements vont aussi au représentant industriel Monsieur GUILLAUME MARQUIS
directeur général de MÉTAL MARQUIS pour avoir confié ce projet aux étudiants. L’équipe a
beaucoup bénéficié de son expertise, son orientation, ainsi que sa disponibilité pour la
réalisation de ce projet.
Aussi, merci à l’université de l’UQAT pour son programme éducatif. L’accueil ainsi que
l’encadrement qu’elle offre, sont une très grande preuve d’expertise en matière de pédagogie et
d’enseignement.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud iii
RÉSUMÉ
L’entreprise Métal Marquis Inc. se spécialise dans la fabrication des pièces mécaniques dans
plusieurs domaines, selon les exigences et les applications de chaque client. Pour la fabrication
des pièces, l’entreprise utilise un robot de découpage pour couper les plaques d’acier.
Le projet d’étude en ingénierie présenté par cette entreprise entre dans le cadre de la formation
de L’UQAT, et plus précisément au département de génie électromécanique.
Le but de ce projet est de générer des croquis avec ses cotations pour le restant des plaques
coupées.
Des recherches documentaires et commerciales ont été effectuées afin de trouver une idée
convenable à la problématique de ce projet. En ce qui concerne la documentation, la recherche
fut basée sur des publications de traitement d’image, des revues scientifiques ainsi que des sites
internet proposant des articles de nouvelle technologie. Alors que les produits commerciaux
existants sur le marché sont plus basés sur les systèmes de contrôle de qualité.
Au cours du projet, trois solutions ont été proposées. Premièrement, une solution d’exploitation
d’un logiciel de numérisation DigXY a été développée avec une caméra et un logiciel de dessin
assisté par ordinateur (DAO); deuxièmement, un relevé dimensionnel des plaques par Smart-
Cam qui consiste à l’utilisation d’un logiciel de reconnaissance d’image capable de définir les
dimensions des plaques coupées selon la distance séparant la caméra et la table de coupe; et
troisièmement, un relevé des dimensions des plaques par caméra Cognex, une caméra de haute
performance dotée d’un logiciel programmable selon l’application désirée.
Afin de vérifier les solutions, des essais ont été réalisés sur quelques plaques chez Métal
Marquis. Les résultats de ces essais ont été discutés en profondeur et confirmés par le client. La
solution retenue mène à l’exploitation du logiciel de numérisation Digxy. Pour terminer, une
étude sur la fixation de la caméra a été réalisée.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud iv
ABSTRACT
The Metal Marquis Company is specialized in the manufacturing of mechanical pieces and
equipments in diversified domains, according to the requirements and applications from each
customer. For manufacturing the pieces, a cutting robot is used in order to cut out the steel
plates.
The project presented by this company falls within the framework of our study at the UQAT,
specifically in the department of electromechanical engineering. The aim of this project is to
automatically sketch and annotate the remaining plates.
Documentation and commercial researches are undertaken in order to find a suitable idea to
realize this project. Regarding documentation, research is based on the image processing
publications. Concerning the commercial products, research is based on the quality control
systems.
During the project, three solutions were proposed. Firstly a solution of exploitation of a
digitizing software DigXY was developed with a camera and a design software computer-
assisted CAD; secondly a dimensional statement of the plates by Smart-Cam which consists of
the use of a software of recognition of image able to define dimensions of the plates cut
according to the distance separating the camera and the table from cut; thirdly a statement of
dimensions of the plates by Cognex camera, a high efficiency camera controlled by a
programmable software for the recognition of the dimensions cut of each plate.
Results obtained are discussed and confirmed by the customer. Finally, a study on the setting of
the camera was made.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud v
Table des matières Liste des figures .................................................................................................................................. vii
Liste des tableaux ................................................................................................................................ ix
Liste des symboles et des abréviations ................................................................................................. x
Chapitre I : Étude des besoins et du mandat. ....................................................................................... 1
1. 1. Introduction ........................................................................................................................... 2
1. 2. Historique et présentation de l’entreprise ............................................................................ 3
1. 3. La situation actuelle .............................................................................................................. 7
1. 4. Problématique ..................................................................................................................... 10
1. 5. Mandat ................................................................................................................................ 11
Chapitre II : Cadre théorique et élaboration des hypothèses. ............................................................. 12
2. 1. Caractéristiques d’équipement ........................................................................................... 13
2. 2. Système de vision ................................................................................................................ 14
2. 2. 1. Description du système ..................................................................................................... 14
2. 2. 2. Type de vision .................................................................................................................... 15
2. 2. 3. Principales composantes du système de vision ................................................................. 15
2. 2. 4. Le système de vision et le contrôle de qualité .................................................................. 17
2. 3. Types et formats d’une image ............................................................................................. 18
2. 4. L’échelle d’une image .......................................................................................................... 19
2. 5. La précision désirée ............................................................................................................. 20
2. 6. Les numériseurs ................................................................................................................... 21
Chapitre III : Mise en œuvre du mandat ............................................................................................. 23
3. 1. Recherche de solutions ....................................................................................................... 24
3.1.1 Relevé dimensionnel des plaques par numérisation ......................................................... 24
3.1.2 Relevé dimensionnel des plaques par Smart-Cam ............................................................ 25
3.1.3 Relevé dimensionnel des plaques par caméra Cognex [6] ................................................ 29
3.1.4 Validation pratique ............................................................................................................ 32
3. 2. Le choix de la solution recommandée ................................................................................. 33
3. 2. 1. Avantages et inconvénients ............................................................................................... 33
3. 2. 2. Matrice de décision ........................................................................................................... 35

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud vi
3. 2. 3. Solution retenue ................................................................................................................ 36
3. 2. 4. Les étapes à suivre pour effectuer le relevé dimensionnel par ordinateur ...................... 39
3. 2. 5. Conditions pour tenir des résultats authentiques ............................................................ 43
3. 2. 6. Installation de la caméra .................................................................................................... 45
3. 2. 7. Fixation par tube télescopique .......................................................................................... 46
3. 2. 8. Fixation avec une plaque ¼ po pliée .................................................................................. 54
3. 2. 9. Étude des coûts .................................................................................................................. 54
3. 2. 10. Santé et sécurité ................................................................................................................ 56
Chapitre IV : Conclusion et recommandations. .................................................................................. 57
4. 1. Conclusion ........................................................................................................................... 58
4. 2. Recommandations ............................................................................................................... 59
Références ........................................................................................................................................... 60
Annexe 1 ............................................................................................................................................. 62
Annexe 2 ............................................................................................................................................. 67

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud vii
Liste des figures
Figure1- 1: Diagramme de croissance 1984-1998 [1]. ............................................................................... 4 Figure1- 2: Diagramme de croissance 1997-2008 [2] ................................................................................ 5 Figure1- 3: Plan du bâtiment de Métal Marquis. [3] ................................................................................... 6 Figure1- 4: Relevée manuelle avec dimension réelle exprimée par des tirets.[2] ....................................... 9 Figure1- 5: Photo représente le reste d’une plaque selon ses dimensions réelles. ...................................... 9 Figure1- 6: Relevé manuel de la plaque représenté sur la photo [2]. .......................................................10 Figure1- 7: Relevé manuel d’une plaque avant la découpe [2]. ................................................................11 Figure1- 8: Relevé manuel de la plaque (figure : 1-7) après la découpe [2]. ...........................................11 Figure 2- 1: Caractéristiques de la table de coupe. ...................................................................................14 Figure 2- 2: Composantes du système de vision .......................................................................................17 Figure 2- 3: Exemple d'une image bitmap et une image vectorielle. [4] ..................................................19 Figure 2- 4: Description d'une photo prise par un avion [5] .....................................................................19 Figure 2- 5: Vérification de tolérances d'un relevé manuel sur auto CAD. ..............................................20
Figure 3- 1: Étapes d'un relevé automatique par ordinateur. .....................................................................24 Figure 3- 2: Étapes de réalisation ..............................................................................................................26 Figure 3- 3: Disposition de la caméra .......................................................................................................26 Figure 3- 4: Calibrage de la photo .............................................................................................................27 Figure 3- 5: Photo traitée sur le logiciel Smart-Cam ................................................................................28 Figure 3- 6: Relevée manuel [2]. ...............................................................................................................28 Figure 3- 7: Caméra Cognex de type 5000 pour le contrôle de la qualité [6] ...........................................30 Figure 3- 8: Exemple d’une plaque dimensionnée avec deux caméras .....................................................31 Figure 3- 9: Photo d'une plaque mesurée avec un ruban à mesurer. .........................................................32 Figure 3- 10: Vecteur des cordonnées (x,y) d’un graphique obtenu par le numériseur DigXY[7]. ..........37 Figure 3- 11: Appareil photo numérique Nikon VS Caméra industrielle CCD haute résolution de Lumenera [13] ...........................................................................................................................................38 Figure 3- 12: Exemple de photo pour une plaque restante. .......................................................................39 Figure 3- 13: Dimensionné l’échelle réelle. ..............................................................................................40 Figure 3- 14: Exécuté des points sur les extrémités. .................................................................................41 Figure 3- 15: Coordonnées des points sélectionnés. .................................................................................41 Figure 3- 16: Les points sélectionnés sont implantés sur l’interface du logiciel INVENTOR. ................42 Figure 3- 17: Cotation de la plaque coupée...............................................................................................43 Figure 3- 18: Paramètres de calibrage d'une photo. ..................................................................................44 Figure 3- 19: Instruments pour la fixation d’une caméra. ........................................................................45 Figure 3- 20: L’appareil photo installé au dessous du plafond. ...............................................................45 Figure 3- 21: Dessin d'un tube télescopique lié avec un moteur. ..............................................................47

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud viii
Figure 3- 22: Descriptions du moteur 24A-D à axes parallèles [8]. ..........................................................49 Figure 3- 23: Caméra et système de fixation.............................................................................................50 Figure 3- 24: Montage électrique permet la manipulation du moteur. ......................................................52 Figure 3- 25: Caméra et sa fixation. ..........................................................................................................54

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud ix
Liste des tableaux
Tableau 3- 1 : Une comparaison entre les mesures acquises manuellement et celle des essais avec la numérisation. .............................................................................................................................................33 Tableau 3- 2 : Les avantages et les inconvénients des solutions proposées ..............................................34 Tableau 3- 3 : Matrice de décision. ...........................................................................................................35 Tableau 3- 4 : Un tableau du représente les composantes utilisées sur le montage électrique. ................53 Tableau 3- 5 : Évaluation des coûts des solutions proposées. ...................................................................55

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud x
Liste des symboles et des abréviations
$ Dollars canadien
mm millimètre
m mètre
cm centimètre
pi pied
po pouce
kg kilogramme
MPa Méga pascal
N/mm2 Newton par millimètre carré = 1 MPa
V volt
N Newton

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 1
Chapitre I : Mandat et étude des besoins.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 2
1. 1. Introduction
Le présent sert à présenter le projet en ingénierie réalisé par l’équipe. Proposé par l’entreprise
Métal Marquis, le sujet d’étude est d’automatiser les relevés dimensionnels des plaques après
leurs utilisations, entre autre. Après le découpage des pièces et avant de remettre la partie
restante de la plaque à l’entrepôt il faudrait dimensionner le restant de la plaque. Plus
précisément, notre projet consiste à remplacer les relevés dimensionnels du machiniste par des
relevés dimensionnels automatisés. Pour des raisons de gestion d’inventaire, l’entreprise a
besoin de garder l’information sur la partie de la plaque restante pour pouvoir l’exploiter.
Cependant, la façon de faire actuelle présente des inconvénients majeurs. On note une perte de
temps dans la prise de mesures et aussi l’imprécision de ces derniers. Gagner du temps est une
des préoccupations majeures de toutes les entreprises et c’est dans ce même intérêt que le
client a présenté ce projet. Après une étude élargie sur la problématique et une étude de
praticabilité, plusieurs solutions apparentes ont été étudiées. La solution qui a été conservée
permet d’avoir la forme réelle de la plaque restante représentée sur un logiciel de dessin DAO
‘Inventor’. De plus, une photo réelle servant de référence pour les utilisateurs sera conservée
dans les archives. Afin d’approuver la solution avec le professeur superviseur et de la
confirmer auprès du client, plusieurs essais ont été réalisés, ce qui a amené à plusieurs
ajustements des solutions. Une fois des résultats satisfaisants obtenus et confirmés en
collaboration avec Monsieur Walid Ghié professeur superviseur et Monsieur Guillaume
Marquis président de Métal Marquis, l’équipe a procédé au choix du matériel à utiliser et à la
planification de l’installation. Ce rapport résume les principales étapes suivies lors de la
réalisation de ce projet; soit l’étude des besoins, le cadre théorique, la mise en œuvre du mandat,
l’étude des coûts, les consignes de santé et de sécurité, et enfin une conclusion, suivie des
recommandations.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 3
1. 2. Historique et présentation de l’entreprise
En 1967, l’entreprise familiale Albert Marquis Forges a été fondée, il n’y avait que Monsieur
Albert Marquis et ses fils qui y travaillaient. Jusqu’en 1984, les employés étaient pratiquement
tous des membres de la famille Marquis. Dix ans plus tard, c’est plus d’une cinquantaine
d’employés qui y travaillaient. En 1979, la moitié des parts de l’entreprise familiale Albert
Marquis Forges a été achetée par ses enfants. Ils ont donc fondé l’entreprise Marquis et Fils. En
1980, l’entreprise a changé de nom pour celui de Métal Marquis. En 1993, trois des enfants ont
racheté l’autre moitié des parts de la compagnie. En 1998, cinq personnes ont acheté 25 % des
parts de l’entreprise.
De 1986 à 1987, l’entreprise a investit un demi-million de dollars pour agrandir l’industrie. Ce
projet a été réalisé pour accueillir Guillaume Marquis, un des trois fils de M. Marquis.
Guillaume Marquis est parti durant quatre ans pour réaliser ses études en génie mécanique à
l’École Polytechnique de l’Université de Montréal. C’est d’ailleurs lui qui, depuis 1995, est à la
tête de l’entreprise.
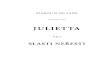
De 1984 à 1998, l’entreprise Métal Marquis a connu plusieurs phases de développement. Ces
phases sont présentées dans la figure suivante:

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 4
Figure1- 1: Diagramme de croissance 1984-1998 [1].
La première période est de 1984 à 1989. Dans celle-ci, Métal Marquis est passé de 5 à 30
employés et leur chiffre d’affaires est passé de 876 000$ à 2,6 millions.
La deuxième phase se situe de 1990 à 1992. Dans cette période, il y a eu un ralentissement à la
grandeur du Québec, ce n’est donc pas facile pour Métal Marquis. De plus, la demande
provenant de la clientèle est limitée, car de nombreux besoins ont été comblés au cours des
années précédentes.
La troisième période se situe de 1993 à 1995. Cette phase est très profitable pour l’entreprise.
Le nombre d’employés passe de 30 à 55 et le chiffre d’affaires monte à 6,2 millions. Par la suite,

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 5
Métal Marquis a augmenté la surface du terrain de 10 000 pi2. Ils ont eu droit à des subventions
gouvernementales pour les aider. De nouveaux produits sont alors créés par l’entreprise,
certains sont même exportés à l’extérieur du Québec.
La quatrième période se situe de 1996 à 1998. Cette phase a été également difficile pour la
compagnie. Le nombre d’employés diminue de cinq et le chiffre d’affaires baisse un peu. De
plus, la vente des nouveaux produits créés durant les années précédentes ne fonctionne pas très
bien. Les employés et la direction se voient devant une situation pénible. Par la suite, de
nouveaux membres entrent dans la direction, pour aider à gérer la situation. Il y a également un
consultant à la gestion qui est engagé. Ce dernier travaille pour la restructuration de l’entreprise
et aussi pour gérer le personnel. L’entreprise vise à toujours améliorer le bien-être des employés.
Elle sait qu’il faut toujours porter une attention particulière aux aspects santé et sécurité au
travail.
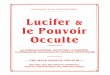
Figure1- 2: Diagramme de croissance 1997-2008 [2]

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 6
De 1997 à 2008, l’entreprise connait deux périodes, une régression ainsi qu’une croissance
comme le montre la figure 1-2. De 1997 à 2003 l’entreprise a connu une récession économique
particulière. De 2003 à 2008 des réformes ainsi que des ajustements ont permis à l’entreprise
non seulement de se reprendre en terme du chiffre d’affaire, mais aussi de former une équipe de
travail avec une plus grande expertise et d’engager de nouvelles formes de service.
Actuellement, Métal Marquis Inc. est une société aux responsabilités limitées et elle compte 50
employés environ. Situé au 159-9e avenue à La Sarre, Québec, et établie en 1980, cette société
s’inscrit parmi les fabricants de pièces et d’équipements dans divers domaines, soit minier,
forestier, agricole, commercial et industriel, comme la réparation des camions réfrigérants, la
fabrication des pinces rétractable, barre à pneu, support bonbonne, etc. Cette corporation est
composée de huit départements, soit la direction, l’administration, l’ingénierie et services
techniques, la soudure, l’usinage, l’atelier de peinture, l’achat et service à la clientèle et
l’entretien.
Figure1- 3: Plan du bâtiment de Métal Marquis. [3]

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 7
Les dirigeants de cette société prônent l’innovation telle qu’ils l’expriment de leurs propres
mots : «Bâtisseur et chef de file, Métal Marquis est déterminé à demeurer à la fine pointe de
l’innovation». D’un autre côté, la qualité, qui est représentée par des produits de choix et un
excellent service aux clients, est un souci majeur dans cette entreprise. D'ailleurs, ses dirigeants
ont mis en place un système de gestion de la qualité ISO 9001:2000 qui est une norme de
qualité reconnue mondialement.
L’industrie Métal-Marquis occupe une grosse part du marché en région en ce qui concerne la
fabrication mécanique et différents clients leur confient cette tâche. Connue pour son expertise
en matière de conception, cette industrie utilise les meilleurs moyens en vigueur pour avoir des
résultats perfectionnistes garantissant ainsi un client satisfait. À titre d’exemple, l’entreprise
vient de livrer une machine de fabrication de glace qui a été conçue pour Hydro Québec. Elle
est constituée de cinq conteneurs allongés dans deux pour la fabrication de glace et deux autres
pour la broyer ainsi qu’une pour la commande électrique.
Le projet que l’on présente à cette entreprise relève du département de l’ingénierie, estimation
et service technique et plus précisément au niveau de la gestion de l’inventaire. En effet, le
mandat consiste à créer un relevé de la partie restante d’une plaque après en avoir découpé une
pièce. Le client Guillaume Marquis, ingénieur en mécanique, président de Métal Marquis Inc.
et aussi membre de son équipe d’ingénierie a encadré ce projet.
1. 3. La situation actuelle
Pour la conception de pièces métalliques, plusieurs manipulations sont nécessaires pour aboutir
à un produit de qualité. Soit le pliage, l’usinage, le soudage, ainsi que le découpage qui est un
élément primordial. Le découpage étant la première étape de fabrication est nécessaire pour le
dimensionnement de la pièce et il favorise l’aboutissement des autres opérations à l’aide de
traçage1
1 Le traçage de la pièce est défini par un léger enlèvement de matière dans des places spécifiques pour
référer les machinistes lors de l’usinage ou du pliage de la pièce.
.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 8
Au sein de l’entreprise Métal Marquis, la fabrication d’une pièce est obtenue en plusieurs
étapes. Tout d’abord une équipe d’ingénierie modélise la pièce en utilisant des logiciels tels que
Inventor, AutoCAD ou SolidWorks selon leur choix. Une fois les dessins accomplis, ces
derniers ont deux utilités : premièrement, confirmer auprès de ses clients l’exactitude du travail
demandé et deuxièmement, ces dessins sont transmis au robot SABRE SXE dont l’utilité est de
couper la pièce à partir d’une plaque. Le choix du métal qui convient à la pièce est sélectionné
selon son usage et les exigences du client. La plaque de métal est ensuite transportée et déposée
sur la table du robot qui lui, après avoir reçu l’image et les instructions concernant la région de
coupe, procède à la coupe.
Une fois la pièce coupée, le machiniste responsable du robot réalise manuellement le dessin de
la partie restante de la plaque afin de bien gérer l’inventaire. À noter, les formes complexes du
contour seront représentées durant ces dessins avec des angles de 90 degrés (voir les tiretés sur
la figure 1-4). Le dessin de la plaque comprend les cotations de chacune des cotes et le
périmètre doit être fermé. Cependant, cela n’est pas toujours vrai, vu les erreurs de mesures qui
peuvent être commises sur l’une ou l’autre des cotes. Pour faire face à ce problème, les
dessinateurs reprennent les dessins à l’aide du logiciel AutoCAD. Lorsque le périmètre des
dessins ne se ferme pas, une tolérance de ±6mm (0,2362205 po) est permise sinon le machiniste
reprend son dessin. Une fois le dessin est correct, il sera scanné et déposé dans le système de
gestion d’inventaire.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 9
Figure1- 4: Relevée manuelle avec dimension réelle exprimée par des tirets.[2]
La procédure utilisée pour les relevés manuels dimensionnels des plaques est beaucoup trop
longue et assez complexe, engendrant ainsi une perte de temps pour différents départements et
des résultats qui ne sont pas toujours très satisfaisants.
La figure 1-5 est une photo du restant d’une plaque coupée. Les lignes de couleur blanche
délimitent la surface considérée par le machiniste. La figure 1-6 représente le croquis manuel de
cette plaque.
Figure1- 5: Photo représente le reste d’une plaque selon ses dimensions réelles.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 10
Figure1- 6: Relevé manuel de la plaque représenté sur la photo [2].
1. 4. Problématique
Métal Marquis Inc. utilise une machine de découpage pour couper les plaques d’acier. Après
chaque coupe, le reste de la plaque coupée est entreposée dans des étagères (voir annexes1).
Chaque plaque a une référence d’emplacement spéciale. Cela demande une recherche longue et
pénible pour trouver une plaque adéquate sur laquelle une nouvelle pièce peut être découpée.
Pour cela, Métal Marquis a besoin de ces relevés pour mieux gérer son inventaire et surtout
pour gagner du temps au niveau de la production.
La problématique est résumée en trois points:
• Le relevé manuel prend beaucoup de temps pour être réalisé.
• Le relevé manuel reste approximatif, car il ne prend pas en considération la
totalité de la plaque.
• La procédure actuelle demande l’intervention de plusieurs employés.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 11
1. 5. Mandat
Après chaque découpage, l’opérateur de la table de coupe utilise un ruban à mesurer pour
prendre les cotations de la plaque coupée. Ensuite, l’opérateur réalise un relevé manuel de la
forme de cette dernière. Le but est de pouvoir effectuer ces relevés (Figure1-7, Figure 1-8) à
l’aide d’un outil qui remplacera la tâche de l’opérateur par des relevés automatiques. La
nouvelle procédure devra accomplir le travail dans un temps optimal.
Figure1- 7: Relevé manuel d’une plaque avant la découpe [2].
Figure1- 8: Relevé manuel de la plaque (figure : 1-7) après la découpe [2].
Le mandat doit réaliser les finalités suivantes:
• Obtenir les dimensions de la partie restante d’une plaque après chaque coupe.
• Remplacer les relevés manuels actuels par des relevés automatisés.
• Réaliser les relevés dans un temps optimal.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 12
• L’erreur sur tout le périmètre de la plaque ne dépasse pas 6 mm.
• Choisir une solution adéquate avec un coût raisonnable.
Pour résoudre la problématique, une recherche théorique sera effectuée sur les logiciels de
traitement d’image et les systèmes de vision industriels, afin de réaliser ce mandat.
Chapitre II : Cadre théorique et élaboration des hypothèses

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 13
L’objectif de ce chapitre est de développer les notions théoriques qui s’intéressent à ce projet.
Ensuite il consiste à citer des informations sur les caractéristiques d’équipements utilisés. Il
existe six éléments nécessaires à prendre en connaissance :
• Caractéristiques d’équipement.
• Système de vision.
• Types et formats d’une image.
• L’échelle d’image.
• La précision désirée.
• Les numériseurs.
La suite de ce chapitre développe les éléments cités ci-haut.
2. 1. Caractéristiques d’équipement
C’est dans le but de familiariser le lecteur avec les équipements de Métal Marquis touchés par
notre problématique que cette section est présentée.
Table de coupe : La table de robot SABRE SXE a une forme rectangulaire de 10,16 m × 3,37m
(400 po × 133po) dont des convoyeurs à chaînes et des lamelles. Sur le coin de la table on
trouve une commande à contrôle programmable qui transmet au robot les formes désirées pour
la coupe (Voir les photos d’équipement en annexes).

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 14
Figure 2- 1: Caractéristiques de la table de coupe.
Les plaques utilisées : Il existe plusieurs formats de plaques utilisées allant de (0,3 m x 0,3 m)
à (6,09 m ×3,04 m).
Pour déplacer les plaques des rangées vers la table de coupe, l’opérateur utilise une manette de
contrôle pour manipuler la potence M7 et le palan de levage. Le déplacement au-dessus de la
table de coupe se fait par des convoyeurs installés au dessus de la table de coupe (Voir les
photos d’équipement en annexe 1).
2. 2. Système de vision
2. 2. 1. Description du système
La vision industrielle nommée aussi la vision assistée par ordinateur a pour principal rôle de
prendre une décision envers un objet. Les applications les plus répondues sont la mesure d’objet,
son positionnement ou encore la reconnaissance de forme. Cette nouvelle technologie est
appliquée à plusieurs domaines comme la métrologie ou l’aéronautique.
La concurrence, la production de masse ainsi que le souci envers la qualité des produits
poussent les industriels à automatiser leurs systèmes de contrôle et ainsi à opter pour les
systèmes de visions qui répondent à toutes ces contraintes.
Le système de vision est composé principalement d’un contrôleur (unité pour le traitement
d’image) et d’une caméra ou d’un capteur optoélectronique quelconque. Les systèmes de vision

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 15
sont jugés autonomes. En d’autres mots, ils sont capables de tirer l’information souhaitée, la
présenter et aussi prendre une décision à son égard.
2. 2. 2. Type de vision
Les techniques de vision se séparent en deux catégories, soient 2D et 3D.
La vision 2D : Ce type de vision convient parfaitement à la problématique de ce projet car dans
cet aspect seulement deux dimensions sont considérées et qui amène à une étude surfacique des
objets. De plus, même si les systèmes de vision sont en général une technologie en expansion,
la technologie 2D est considérablement plus maitrisée que la vision 3D.
La vision 3D : Cette technologie est en plein développement et de plus en plus répandue. Elle
consiste à étudier des objets en trois dimensions et procure une précision élevée. Suite à
l’obtention de plusieurs images fournies à partir de deux caméras ou plus et d’un tracé laser, le
système réalise des calculs géométriques complexes basés sur les principes de triangulation
pour ainsi obtenir l’information nécessaire pour modéliser l’objet en 3D.
2. 2. 3. Principales composantes du système de vision
Le système de vision se compose de plusieurs éléments nécessaires à son fonctionnement (Figure2-2). La description de ces éléments est la suivante :
Éclairage : L’éclairage est un facteur essentiel dans les systèmes de mesures.
Ce facteur est nécessaire pour deux raisons : 1) l’éclairage est essentiel pour ressortir tous les
détails de l’objet à analyser. 2) L’éclairage facilite plus tard le traitement de l’image grâce au
contraste créé par la présence d’objet et par sa silhouette.
Deux styles d’éclairages sont possibles, soit par une source de lumière continue ou par une
source stroboscopique aussi appelée Flash pour les appareils photo.
Objectif : L’objectif est une composition d’une ou plusieurs lentilles convergentes servant
essentiellement à former une image de l’objet désiré.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 16
La taille et la position de l’image peuvent être calculées selon les lois de l’optique
géométrique par l’expression suivante:
𝑀𝑀 = 𝑉𝑉𝑈𝑈
(2.1)
Où :
M : Le facteur d’agrandissement (sans unité)
V : La distance image-lentille (Unité de mesure)
U : La distance objet-lentille (Unité de mesure)
Cependant, les objectifs ont un défaut de positionnement géométrique majeur qui est la
distorsion. Deux types de distorsion sont distingués. La distorsion radiale est définie comme
étant le décalage de l’image en grandeur créant une déformation soit en forme de barillet ou en
forme de coussinet. Le deuxième type de distorsion est la distorsion tangentielle qui est souvent
négligée par rapport à la première puisqu’elle définit la déformation des points et non de
l’ensemble de l’image.
Ces défauts de qualité doivent être identifiés et traités lors du calibrage de la caméra.
Senseur : Le capteur est essentiel dans un système de vision. Il transforme l’image constituée
par l’objectif en un signal analogique.
Un senseur CCD2
Carte d’acquisition : Le signal analogique constitué par les senseurs est ensuite transformé en
un signal numérique. Les cartes d’acquisition effectuent un échantillonnage de l’image et ils
codent chaque petit élément de cet échantillonnage, ce qui génère un code numérique formulant
l’image.
est constitué d’un réseau de capteur formant une structure matricielle ou
linéaire capable de tirer toute l’information par rapport à l’image.
2 L’abréviation mot CCD, Couple Charge Device, désigne un senseur qui convertit la lumière en charges
électriques. Beaucoup utilisé dans les appareils photo numériques, les scanneurs ou les caméras.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 17
Contrôleur : À la sortie d’une carte d’acquisition, on obtient un signal numérique. En général
le traitement de l’image ne se termine pas là. Selon l’application, les contrôleurs servent à
analyser l’image, l’étudier et tirer les informations pertinentes, voir même porter un jugement
critique envers l’une de ses caractéristiques.
Figure 2- 2: Composantes du système de vision
2. 2. 4. Le système de vision et le contrôle de qualité
Le contrôle de qualité est un processus qui contrôle la validité d’une pièce, dans le cas présent
la validité est relative à deux éléments essentiels: la structure et la dimension. La première
renseigne sur la conformité de la forme alors que la dimension informe sur la conformité et le
respect des normes.
Compte tenu des éléments imprévisibles qui peuvent arriver dans tout procédé de fabrication
des pièces, de nombreux incidents peuvent avoir lieu. Dans une chaîne de production, certains
éléments affectent directement le dit procédé, et apportent des changements au niveau du
résultat final et ainsi sur la qualité des produits générés. Afin d’éviter ce genre de situation,
diverses étapes de contrôle sont mises en place dans une chaîne de production. D’une part, ce
contrôle en pratique vise à détecter les défauts dans les pièces qui peuvent rendre ces dernières
inutilisables. D’autre part, il cible les pièces qui ne correspondent pas aux normes de fabrication
demandées pour le produit fini.
Il est évident que l’évaluation d’une pièce finie peut être effectuée visuellement par une
personne, mais il reste cependant que certains éléments de fabrication ne seront pas pris en

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 18
considération par le coup d’œil de cette personne. Par exemple l’identification des tolérances ou
même le dimensionnement exact. L’utilisation des outils adaptés comme un système de vision
technologique permettrait de faire l’évaluation de toute la pièce en tenant compte des normes
recherchées.
2. 3. Types et formats d’une image
Il existe deux types d’images, les images bitmap et les images vectorielles :
Une image bitmap est une image constituée de plusieurs éléments. L’ensemble de ces éléments
forme un tableau de milliers de rectangles que l’on appelle des pixels. Le type bitmap est le
type utilisé pour les photos numériques. Le mot bitmap parvient de terme anglais (bit : élément
et map : carte).
Les images vectorielles sont définies par des expressions mathématiques (ligne, polygones, arcs
de cercle, etc.). Par exemple, un cercle est défini par son centre et son rayon et une ligne définie
par son équation. Il est possible d’agrandir ces images sans perdre d’informations. 3
Pour enregistrer les images numérisées, on utilise plusieurs formats de fichiers images. Ces
derniers sont généralement compressés avec ou sans perte d’informations. Parmi les formats de
fichiers images les plus connus, on trouve BMP, JPEG, TIFF, GIF et PNG. Le mot bitmap
(.BMP) ici signifie le format et non le type. Il faut différencier entre le bitmap format et le
bitmap type, les deux ont la même expression, mais sont deux choses différentes (Figure 2- 3).
Pour la présentation d’une image affichée sur une page ou un site web, nous n’utilisons que des
images de type bitmap (les images au format GIF, JPEG, PNG entrent dans la catégorie de type
bitmap). Seuls certains logiciels comme Illustrator d’Adobe ou Flash de Macromedia
permettent de créer des images vectorielles [4].
3 Sans perte d’informations c'est-à-dire en gardant une bonne qualité même si l’image est agrandie.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 19
Aujourd’hui, l’hypothèse d’obtenir une image vectorielle à partir d'une photo est encore
irréalisable, même si des recherches ont lieu sur ce sujet en analyse d'image.
Figure 2- 4: Exemple d'une image bitmap et une image vectorielle. [4]
2. 4. L’échelle d’une image
Image bitmap : L’échelle d’une image bitmap est une commande qui peut agrandir ou réduire
la taille de l'image en changeant le nombre de pixels qu'elle contient.
Échelle d’une photo aérienne :
La photo aérienne [5] est une photo qui est prise des airs par un avion, suivant la
perpendiculaire sur la lentille (objectif). Le rapport entre la distance de deux points sur une
photo et la distance réelle entre ces deux points est défini par une échelle.
Figure 2- 5: Description d'une photo prise par un avion [5]

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 20
L’équation (2.2) permet le calcul d’une échelle :
𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷 𝑓𝑓𝑓𝑓𝐷𝐷𝐷𝐷𝑓𝑓𝐷𝐷 𝐻𝐻𝐷𝐷𝐻𝐻𝐷𝐷𝐷𝐷𝐻𝐻𝐻𝐻 𝐷𝐷𝐻𝐻 𝑑𝑑𝐷𝐷𝐷𝐷𝐷𝐷𝐻𝐻𝐷𝐷 𝑑𝑑𝐻𝐻 𝐷𝐷𝑓𝑓𝑓𝑓
= É𝐷𝐷ℎ𝐷𝐷𝑓𝑓𝑓𝑓𝐷𝐷 (2.2)
L’application de cette expression donne:
140𝑚𝑚𝑚𝑚1400000𝑚𝑚𝑚𝑚
=1
10000→ É𝐷𝐷ℎ𝐷𝐷𝑓𝑓𝑓𝑓𝐷𝐷
110000
Donc la distance de un millimètre sur la photo représente une distance de 10000 millimètres sur
le sol.
2. 5. La précision désirée
Après chaque dessin de relevé manuel, on redessine ce dernier sur le logiciel AutoCAD. Afin
que le relevé soit confirmé, il faut que le périmètre se ferme avec une tolérance de 6mm (voir
figure 2-5). Cela veut dire que la précision désirée soit de moins de 6 mm sur la sommation des
côtés verticaux et horizontaux.
Figure 2- 6: Vérification de tolérances d'un relevé manuel sur auto CAD.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 21
Pour les côtés horizontaux, s’il y a un déplacement de gauche vers la droite, le signe des côtés
sera positif, et s’il y a un déplacement de droite à gauche le signe sera négatif (+ →, ← -).
Pour les côtés verticaux, si le déplacement effectué est de haut en bas, le signe des côtés sera
positif, et si le déplacement effectué est de bas en haut, le signe des côtés sera négatif (+ ↓, ↑ -).
Pour que le relevé manuel soit confirmé il faut que :
(a) + (−b) + (c) + (−d) + (−e) ≤ ±6 mm (2.3)
Et que
(A) + (B) + (C) + (−D) + (−E) ≤ ±6 mm (2.4)
Où a, b, c, d et e sont les cotations des côtés horizontaux et A, B, C, D et E sont les cotations
de côtés verticaux.
2. 6. Les numériseurs
Le mot numériseur est la traduction du mot scanner, qui provient du verbe anglais (to scan). Il
existe plusieurs types de numériseurs. À titre d’exemple : les numériseurs industriels, les
numériseurs de documents ou de photos, les numériseurs médicaux, etc.
Les numériseurs industriels permettent de réaliser un dessin en 3D de la forme de l’objet
numérisé à l’aide des rayons laser.
Le numériseur de documents est capable de stocker les objets (image ou document) sur la
mémoire d'un ordinateur ou sur un support informatique (disque dur, CD-ROM, mémoire flash).
Il existe aussi des numériseurs par calquage utilisant les souris d’ordinateur ou des stylos
numériseurs qui permettent de calquer les objets.
Les numériseurs médicaux sont capables de prendre une image à l'aide des rayons x à l'intérieur
du corps humain.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 22
Pour trouver une solution adéquate, une hypothèse a été posée. Celle-ci consiste à étudier la
possibilité d’afficher une image sur l’interface du logiciel DAO et d’obtenir des cotations à
partir de cette image.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 23
Chapitre III : Recherche de solutions

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 24
Le but de ce chapitre est de chercher une solution adéquate. Pour ce la nous avons étudié trois
solution possible. Les deux premières consistent à utiliser une photo de la plaque, et la
troisième est une application directe de la caméra Cognex de contrôle de qualité. Par la suite, il
serait possible de sélectionner celle qui sera la plus adéquate.
3. 1. Recherche de solutions
3.1.1 Relevé dimensionnel des plaques par numérisation
Cette solution consiste à obtenir le relevé dimensionnel des plaques par ordinateur. Ce dernier
va être lié à un appareil photo numérique installé au-dessus de la table de coupe. Cet appareil
sert à prendre des photos du reste de la plaque qui doit être dimensionné. La photo prise sera
enregistrée sous extension (.bmp) sur l’ordinateur. L’opérateur ouvre cette photo dans un
logiciel convertisseur analogique-numérique (DigXY) afin d’extraire les données (les
coordonnées des extrémités) de la plaque restante sous forme d’un tableau Excel et ensuite, les
données du tableau vont être transmises à un logiciel DAO pour pouvoir dessiner la forme de la
plaque et la dimensionner.
La figure 3-1 résume les étapes à utiliser pour avoir un relevé automatique d’une plaque.
Figure 3- 1: Étapes d'un relevé automatique par ordinateur.
La numérisation automatique des plaques se fait selon les étapes suivantes :
Prendre une photo
de la plaque
Glisser la photo dans le logiciel de
numérisation DigXY
Numériser les
coordonnées de la plaque
Afficher les coordonées sur
le logiciel Inventor
Lier les points et tirer
les dimensions

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 25
• Prise de photo de la plaque à traiter;
• Traitement de la photo par le logiciel Paint;
• Traitement de l’image par le numériseur DigXY, qui permet de numériser les bords de
la plaque sur la photo obtenue;
• Une saisie des coordonnées de la plaque sous forme de tableau bidimensionnel (selon :
x, y), enregistré sous format Excel, dans le logiciel;
• Les coordonnées saisies permettent, l’élaboration d’une esquisse de la plaque dans un
logiciel de DAO (Inventor), ce qui permettra d’obtenir les dimensions ainsi que la forme
de la plaque.
Après la prise de la photo, l’opérateur utilise la commande imprime écran (Impr. Écran) sur le
clavier afin d’enregistrer la photo sur l’interface de logiciel Paint. Puis l’opérateur ouvre cette
photo sur l’interface de numériseur DigXY utilisant la commande ouvrir. Ce logiciel permet à
l’opérateur de saisir les coordonnées de n’importe quel point sur la photo. Ensuite l’opérateur
choisit les coordonnées des extrémités de la plaque. Un tableau des coordonnées (x,y) va être
affiché sous forme Excel. L’implantation de ces coordonnées sur l’interface du logiciel Inventor
sera nécessaire pour avoir une esquisse de la plaque sous forme de points. Finalement, une
liaison entre ces points permet d’avoir un croquis de la plaque et d’enfin tirer les dimensions
désirées.
3.1.2 Relevé dimensionnel des plaques par Smart-Cam
Présentement, les systèmes de vision sont considérés étant à la pointe de la technologie et des
besoins actuels. Cependant, pour l’application de Métal-Marquis, le logiciel de vision Smart-
Cam étant un système économique, mais pas très performant au niveau de l’autonomie et de la
prise de décision, serait efficace pour l’application demandée. La figure 3-2 résume les étapes
de réalisation.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 26
Figure 3- 2: Étapes de réalisation
Smart-Cam : Smart-Cam est un logiciel de vision peu coûteux capable d’effectuer des mesures sur une pièce à partir d’une photo.
Des critères sont nécessaires pour l’installation d’une caméra. Premièrement, elle doit avoir une
résolution supérieure à 800×600. Deuxièmement, la caméra doit être installée sur un plan
horizontal et préférablement centrée à la plaque telle la figure 3-3.
Figure 3- 3: Disposition de la caméra
Étapes suivies : Il suffit d’insérer les photos capturées dans le logiciel. Par la suite, le logiciel effectue un auto-calibrage rien qu’en lui donnant la distance entre la plaque et l’appareil à photo.
Prendre une photo de la plaque
Glisser la photo dans le logiciel
Smart-camCalibrer la photo
coter les dimension sur
la photo et enregistrer les
resultats

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 27
Figure 3- 4: Calibrage de la photo
L’exemple qui suit sur la figure 3-5 révèle que le logiciel donne de parfaits résultats avec des
erreurs très minimes n’excédant pas les 9mm (0.35 po).
Les photos seront enregistrées sur un fichier spécifique dans le réseau interne de Métal Marquis
et donc facile d’accès. Doté d’une fonction de cotation, ce logiciel est capable de mesurer
n’importe quelle distance telle la figure 3-5.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 28
Figure 3- 5: Photo traitée sur le logiciel Smart-Cam
Il est aussi possible de vérifier l’exactitude de ces résultats grâce au relevé manuel disponible
dans les archives du réseau interne de Métal-Marquis. Sur la figure 3-6, la plaque PLF9134 a
été choisie pour les essais étant donné sa grandeur et sa forme. En traduisant les mesures
combinées4
en pieds et en pouces en seulement des pouces et en les comparants avec ceux
obtenus par le relevé manuel ci-dessous, il est clair que l’erreur en terme de cotations est très
minime et la superficie représentée par la photo est plus significative.
Figure 3- 6: Relevée manuel [2].
4 Une couleur différente est utilisée pour chaque cote. La même couleur est référée par une équerre en
avant de la valeur de la cote.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 29
Vu l’expérience vécue avec ce logiciel de vision, il est possible de dire que ce logiciel offre des
résultats satisfaisants. Par contre, son interface n’est pas très conviviale.
3.1.3 Relevé dimensionnel des plaques par caméra Cognex [6]
L’introduction d’un système de vision de contrôle de qualité apporte une solution intéressante à
la problématique. L’application de ce système sur la plaque restante permet de donner la forme
et les dimensions de cette dernière. Donc, c’est comme le travail fait par l’opérateur de la table
de coupe, mais avec des avantages supplémentaires que l’œil humain ne peut pas observer.
L’utilité de caméra COGNEX : Parmi de nombreux modèles de caméra existants, il y en a un
qui s’avère plus intéressant que les autres. L'objectif de l’utilisation de la caméra COGNEX est
de contrôler et de voir si les produits sont bien fabriqués. Le but est d’évaluer l’admissibilité de
ces produits par rapport aux conditions et aux exigences préétablies. Cela permet de prendre
une décision d'acceptation, ou de refus. La caméra peut détecter la forme et les dimensions des
objets présentés sous cette dernière.
Pour ce projet, l’objectif est de déterminer la forme et les cotations d’une plaque après la
découpe. Il est alors nécessaire d’utiliser des outils de mesure permettant la validation de
formes et les dimensions des plaques. La caméra COGNEX répond exactement au besoin, elle
permet de mesurer les dimensions des pièces.
La plaque doit être présentée sous la caméra COGNEX. Cet appareil peut accomplir les tâches
suivantes :
1) Tout d’abord, la caméra programmable prend les dimensions des côtés d’un produit. Elle
émet par la suite les résultats.
2) Ensuite, elle contrôle les résultats, en comparant les mesures obtenues avec ceux de
référence (une pièce est bien fabriquée comme référence).
3) Enfin, elle capte les produits qui contiennent des défauts de fabrication.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 30
Pour cette application, l’utilisation va se limiter seulement sur la première tâche. Les besoins
sont uniquement : la forme (le contour) et les cotations des côtés de la plaque après chaque
coupe. Pour répondre au mandat de ce projet, la première tâche sera suffisante.
Il existe plusieurs types de Caméras Cognex, à titre d'exemple: In-Sight 1000, In-Sight 1700,
In-Sight 5000, In-Sight 5100 etc.
L’entreprise Cadence Automatisation est le seul distributeur de caméra Cognex au Québec, elle
est située à Montréal. Nous avons effectué une réunion avec M. Marc-André directeur de cette
entreprise afin de discuter du chiox de la caméra qui est le plus adéquat pout l’application sur ce
projet. Les principaux points discutés lors de cette rencontre sont le type de la caméra ainsi que
le niveau de précision. Le modèle In-Sight 5000 (figure 3-7) a été le produit le plus approprié
pour ce projet. Ensuite, pour ce qui est de la précision, l’installation de deux caméras sera
nécessaire pour arriver à la précision désirée. L’exemple qui suit (figure 3-8, et les équations 3-
1,3-2) va expliquer la précision obtenue avec deux caméras sur une plaque de dimension
3048mm ×2540 mm (120 po x 100 po).
Les caméras utilisées sont d’une précision de 1600 x 1920 = 3,07 méga pixels.
Figure 3- 7: Caméra Cognex de type 5000 pour le contrôle de la qualité [6]

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 31
Précision avec deux caméras: Comme il a été vu au chapitre précédent, x représente les côtés
horizontaux (3.1) et y représente les côtés verticaux (3.2). L’erreur obtenue sur les mesures de
la plaque ne dépasse pas 0,95 mm sur chaque côté horizontal et 1,32 mm sur chaque côté
vertical. Voir le calcul ci-dessus.
𝑥𝑥 = 3048 mm(1600+1600) pixel
≈ ±0,9525 mm (3.1).
𝑦𝑦 = 2540 mm1920 pixel
≈ ±1,32 mm (3.2).
Remarque : L’installation de plusieurs caméras permet d’augmenter la précision.
Figure 3- 8: Exemple d’une plaque dimensionnée avec deux caméras
Les caractéristiques de la caméra COGNEX : La caméra COGNEX est un appareil moderne
électronique automatisé. Elle détermine et spécifie la qualité d’un produit. Elle est composée
principalement de deux éléments. Le premier étant l’optique, ou autrement dit, l’ensemble de
lentilles permettant une projection de l’image environnante sur une surface de lecture. Par la
suite, il est traité par un logiciel spécial In-Shit. Le second étant le contrôleur de la caméra lui-
même. La caméra COGNEX (figure 3-7) est capable de fonctionner en réseau, et de se

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 32
spécialiser pour la vérification de contrôle, la mesure, l’identification et le guidage automatisé
en milieu industriel.
3.1.4 Validation pratique
En théorie, les solutions proposées semblaient convenables à notre problématique. Comme le
veut le bon cheminement du projet, une validation auprès du client était nécessaire. Après une
présentation dans les locaux de Métal-Marquis, il a été convenu que des essais seraient
nécessaires pour confirmer l’efficacité du système sélectionné.
Pour débuter, une première série d’essais a été effectuée au-dessus de la table de coupe pour
ainsi simuler au maximum la procédure proposée par la solution. Grâce à une nacelle, des
photos ont été prises sur plusieurs niveaux pour ainsi voir l’influence de la distance d’élévation
par rapport au sol sur la qualité des photos. Les résultats obtenus étaient satisfaisants et la
précision ainsi que la qualité des photos étaient à la hauteur des résultats attendus. Cependant,
l’équipe n’avait pas tout prévu, la plaque que nous avions choisie a été consommée en totalité le
soir après nos essais, ce qui n’a pas laissé de trace au client pour qu’il puisse se référer. Cela a
donc poussé l’équipe à reprendre les essais. Cette fois-ci, les essais ont été réalisés sur cinq
plaques différentes. Une fois encore les résultats étaient concluants. Après une seconde
présentation auprès du client, une solution a été retenue. Cela amène à la suite du projet qui est
de faire le choix des composantes à utiliser pour la fixation et l’implantation du système.
Figure 3- 9: Photo d'une plaque mesurée avec un ruban à mesurer.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 33
La figure 3-9 ci-dessus, représente une plaque coupée et cotée. Les mesures affichées sur la
plaque sont prises par un ruban à mesure manuellement. Le tableau (3-1) montre une
comparaison entre les mesures obtenues avec le numériseur et celles obtenues manuellement.
Ensuite une évaluation d’erreur relative a été effectuée. Il est possible de voir que l’erreur
relative est faible et ne dépasse pas 1,6 %.
Tableau 3- 1 : Une comparaison entre les mesures acquises manuellement et celle des essais avec la numérisation.
Mesure obtenue par un ruban à
mesurer = (𝐀𝐀)
Mesure obtenue par le
numériseur DigXY = ( 𝐁𝐁 )
Erreur relative en (%) 𝐀𝐀 − 𝐁𝐁𝐀𝐀
× 𝟏𝟏𝟏𝟏𝟏𝟏
19,5 po 19,24 po 1,33 %
40,5 po 39,95 po 1,35 %
9,5 po 9,4 po 1,05 %
6 po 5,9 po 1,6 %
58 po 57,27 po 1,25 %
51,75 po 50,97 Po 1,5 %
3. 2. Le choix de la solution recommandée
Cette section présente les procédés utilisés pour la sélection d’une solution parmi les trois
proposées. Le développement de cette solution suivra dans ce chapitre.
3. 2. 1. Avantages et inconvénients
Une comparaison au niveau des avantages et inconvénients de chaque solution a été effectuée
(Tableau3-2). En ce qui concerne la première et la deuxième solution, la comparaison a été
basée sur des essais. Alors que pour la troisième solution proposant la caméra Cognex, la
comparaison fut basée sur les informations obtenues lors d’une visite à l’entreprise Cadence
Automatisation (le distributeur de caméra Cognex, voir Annexes 2)

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 34
Tableau 3- 2 : Les avantages et les inconvénients des solutions proposées
Solution Avantages Inconvénients
Solution 1
Relevé dimensionnel des
plaques par numérisation.
Dimensions conservées sur
ordinateur.
Un croquis présenté dans une
cartouche spatiale.
Dimension visible.
Un croquis des plaques
conservé.
Relevés de dimensions rapides
(<10min).
Coût faible.
Risque d’obtention
des photos floues.
Solution 2
Relevé dimensionnel des
plaques par Smart-Cam.
Dimensions conservées sur
ordinateur.
Relevés de dimensions rapides
(<5min).
Coût faible.
Risque d’obtention
des photos floues.
Affichage floue des
résultats.
Solution 3
Relevé dimensionnel des
plaques par caméra Cognex.
Plus de précision.
Relevés de dimensions rapides
Dimensions conservées sur un
ordinateur.
Coût élevé.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 35
3. 2. 2. Matrice de décision
Après l’étude des trois solutions proposées, une matrice de décision a été construite avec les
critères d’évaluations indiqués (Tableau 3-3).
Le but de ce tableau est de discuter des résultats obtenus. Il est motionné que la solution N° 1
obtient une pondération de 92.75%, ce qui la met en tête de la liste des trois solutions étudiées
ainsi, répondant au mieux aux critères demandés.
Remarque : Dans cette matrice de décision, une pondération importante (0,45) a été allouée au
critère du coût. Ce critère comptait parmi les principaux points à respecter pour satisfaire le
client.
Tableau 3- 3 : Matrice de décision.
Critères
d'évaluation Précision
Qualité de
l’affichage Manipulation Coût total
Évaluation globale
aux critères en %
Pondération 0,3 0,2 0,05 0,45 Somme =1
Solution 1
Relevé dimensionnel
des plaques par
numérisation
90 % 95 % 80 % 95 % 92,75 %
Solution 2
Relevé dimensionnel
des plaques par
Smart-Cam.
80 % 10 % 85 % 95 % 73 %
Solution 3
Relevé dimensionnel
des plaques par la
caméra Cognex.
95 % 90 % 90 % 20 % 60 %

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 36
3. 2. 3. Solution retenue
Après cette comparaison de solutions, une seule s’est avérée être la bonne. La première solution
soit le relevé dimensionnel des plaques par numérisation, est celle qui a été choisie par le client,
suite aux avantages qu’elle présente (Tableau 3-3) et à sa facilité de manipulation. Par la suite,
cette solution sera développée.
Les équipements utilisés :
• Logiciel de numérisation DigXY.
• Caméra et contrôle de l’image.
• Un bras fixe.
• Microsoft Office Excel.
• Logiciel de fabrication mécanique Inventor.
• Ordinateur de base.
Le numériseur DigXY est un convertisseur analogique numérique avec une interface
conviviale qui permet d’analyser les données d'un graphique ou d'un diagramme. Il numérise
les données d'une image balayée et fournit les résultats sous forme d’un vecteur des
coordonnées (x,y). Ensuite, il affiche les résultats sur une feuille de vue (Figure 3-10) et peut
être collé directement dans Microsoft Excel ou éditeur de texte (extension .txt). Ce logiciel de
numérisation est facile à utiliser et fonctionne même si l'image est tournée.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 37
Figure 3- 10: Vecteur des cordonnées (x,y) d’un graphique obtenu par le numériseur DigXY[7].
La figure (3- 10) montre un exemple de vecteur de coordonnées (x,y) obtenu par rapport au
graphique qui représente sur la figure 3-10. Les signes + de couleur rouge sur le graphique
représentent les points que l’utilisateur choisit pour savoir leurs coordonnées. L’implantation
de ces signes + est effectuée par des clics avec la souris sur l’image affichée sur l’interface du
logiciel DigXY.
Caméra et contrôle de l’image : Les différentes solutions qui ont été présentées
précédemment répondent à nos exigences. Chacune d’entre elles a ses particularités, ses
avantages et ses inconvénients. Cependant elles ont toutes un point commun. Ce chapitre
s’intéresse à «comment les photos seront prises?» en d’autres mots quel sera l’appareil photo
utilisé, comment sera-t-il fixé et comment l’appareil photo sera contrôlé à distance.
Choix de la caméra : Dans l’industrie, il est rare de voir l’installation d’un appareil- photo fixe.
Les caméras industrielles sont beaucoup utilisées car elles permettent la prise de vidéo qui est
très utile pour les systèmes de surveillances ou aussi pour les systèmes de contrôle de qualité
(Système de vision). Cependant, pour l’application de ce projet, une prise de photo serait
suffisante, ce qui donne le choix entre une caméra industrielle ou tout simplement un appareil
photo numérique standard.
Pour le choix de l’appareil photo, deux facteurs ont été considérés soient :

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 38
La compatibilité avec un système de contrôle à distance;
La qualité de l’image et sa résolution.
Après une étude minutieuse des produits disponibles dans le marché. L’équipe propose le
choix entre les deux produits suivants (Figure 3-11):
• Un appareil photo numérique Nikon Coolpix P90 avec comme point fort une prise
d’image allant jusqu’à 12 millions de pixels avec un format 1 :1 et un zoom allant
jusqu’à 24 fois.
• Une caméra industrielle CCD haute résolution de Lumenera offrant une résolution de 3
Millions de pixels et une texture adéquate pour les milieux industriels supportant la
chaleur et l’humidité. À noter que la caméra est capable de prendre des photos à partir
de l’ordinateur de connexion, cela grâce à son logiciel de contrôle.
Figure 3- 11: Appareil photo numérique Nikon VS Caméra industrielle CCD haute résolution de Lumenera [13]
L’appareil photo Nikon a été choisi pour le logiciel de Nikon qui offre la fonctionnalité de
contrôle à distance.
En effet, le logiciel Camera control pro 2 de Nikon permet de régler à distance la plupart des
fonctionnalités des appareils photos Nikon. Commander à distance par un ordinateur connecté à
l’appareil avec soit un simple câble USB ou par réseau sans fil!

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 39
Les images prises sont ensuite stockées dans les serveurs de Métal Marquis ce qui permettrait à
n’importe quel utilisateur du réseau de manipuler et utiliser les photos. Cela dit, la prise d’une
photo serait réalisée par le machiniste à partir de son ordinateur à proximité de la table de coupe
et ensuite une autre personne dans la société pourrait venir prendre les mesures sur la photo qui,
évidemment, sera disponible sur le réseau.
3. 2. 4. Les étapes à suivre pour effectuer le relevé dimensionnel par ordinateur
i. Choisir une référence réelle ;
En ce qui concerne le repère choisi, une équerre chiffrée de 90° sera utile. Dans l’exemple
montré ci-dessous (Figure3-9), l’équerre et représentée par un traçage de deux lignes
perpendiculaires de 0,5m×0,5m (20po ×20po). Cette dernière va se poser au dessus de la plaque.
De cette façon, une référence d’échelle réelle est affichée sur chaque photo. L’unité des
coordonnées obtenues sera confondue avec celle de l’équerre présentée.
ii. Prendre une photo du reste de la plaque à dimensionner ;
Un appareil photo va être installé au-dessus de la table afin de prendre des photos de la plaque
qui doit être dimensionnée (Figure 3-12).
Figure 3- 12: Exemple de photo pour une plaque restante.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 40
iii. Définir les coordonnées des extrémités de la plaque restante dans le logiciel
DIGXY ;
Après avoir ouvert la photo de la plaque sur l’interface de logiciel DigXY, il faut la mettre à
l’échelle réelle. Le logiciel demande ensuite à l’utilisateur d’introduire les valeurs minimums et
maximums des axes du repère choisi (Figure 3-13).
Figure 3- 13: Dimensionné l’échelle réelle.
Par la suite, il faut définir les points des extrémités par un simple clic sur la photo (Figure 3-14).

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 41
Figure 3- 14: Exécuté des points sur les extrémités.
Finalement, il faut enregistrer les données de ces points sous forme d’un fichier Excel (Figure
3-15).
Figure 3- 15: Coordonnées des points sélectionnés.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 42
iv. Importer les données du tableau Excel dans le logiciel de dessin Inventor (Voir
Annexe 2);
En important le fichier Excel dans Inventor et en utilisant la commande “Import Points“, il est
possible d’obtenir des points sur l’interface d’Inventor comme le démontre la figure suivante:
Figure 3- 16: Les points sélectionnés sont implantés sur l’interface du logiciel INVENTOR.
Il faut donc lier ces points afin d’obtenir un croquis de la plaque restante, et à la fin tirer les
cotations désirées (Figure 3-17).

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 43
Figure 3- 17: Cotation de la plaque coupée.
Pour conclure, l’approche proposée est satisfaisante étant donné qu’elle répond à l’hypothèse
posée à la fin du chapitre II. Pour l’équipe, au début du projet l’implantation d’une image sur
l’interface d’un logiciel DAO dans le but d’effectuer des cotations, était un concept difficile à
réaliser. Finalement grâce à l’aide de logiciel DigXY l’implantation de quelques données
(coordonnées) d’une image sur l’interface de logiciel Invetor a été une idée réalisable.
3. 2. 5. Conditions pour tenir des résultats authentiques
1. La photo prise sera enregistrée sous extension (.bmp) : veuillez noter que le numériseur
DigXY n'est pas compatible avec tous les formats photographiques. Cependant, il est
capable d’ouvrir un fichier sous extension bmp. Enregistrer les photos de formats: JPG,
JPEG, TIFF, GIF et PNG d’une image sous une extension bmp est donc essentiel.
2. La lentille de l’appareil photo doit être en parallèle avec la table de coupe : la photo
prise va être comme une photo aérienne. Normalement, elle devrait être prise d’en haut en
suivant la verticale. Cela veut dire que l’axe d’objet (la lentille) va être perpendiculaire à la
plaque (cette étape est importante pour diminuer l’erreur).

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 44
3. Le repère choisi et le plan supérieur de la plaque vont être dans le même plan : après
l’ouverture de la photo dans l’interface du logiciel DigXY, il est demandé à l’utilisateur de
définir l’origine et aussi les extrémités du repère (x,y) réel sur la photo. Les coordonnées
obtenues sont par rapport au repère choisi. Son emplacement est important pour avoir des
résultats authentiques. Après plusieurs essais sur les diverses plaques, nous avons conclu
que l’emplacement du repère doit être parfaitement parallèle avec le plan supérieur de la
plaque.
Figure 3- 18: Paramètres de calibrage d'une photo.
La figure 3-18 présentée ci-haut, explique le principe d’échelle d’une photo prise par la
verticale. La définition d’une échelle est exprimée par deux expressions : la première étant le
rapport entre la distance sur la photo et la distance réelle sur la plaque, et la seconde étant le
rapport entre la distance focale et la hauteur au-dessus de la plaque. Pour garder l’échelle
constante, il faut que la distance entre l’objet (la lentille) et la face supérieure soit égale à la
distance entre l’objet et le repère choisi. Notons que la distance focale est toujours constante.
De façon générale, le repère doit être confondu avec la face supérieure de la plaque parce que
les coordonnées des points numérisés sont situées sur cette face.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 45
3. 2. 6. Installation de la caméra
Pour la fixation d’un système de vision, il existe plusieurs supports sur le marché (Figure 3-19).
À titre d’exemple : le BTECH Fixation plafond télescopique pour LCD [10], le support
Microstage [11], le support Quick-Camera [12].
Figure 3- 19: Instruments pour la fixation d’une caméra.
L’emplacement de la caméra est proposé par le client. Cette caméra sera installée au plafond et
exactement au-dessus de la table de coupe.(Figure 3-20).
Figure 3- 20: L’appareil photo installé au dessous du plafond.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 46
3. 2. 7. Fixation par tube télescopique
Afin de garder l’échelle 1 :1 de la caméra, il serait utile de concevoir un système de fixation qui
permet le déplacement de la caméra. Notons que l’échelle 1 :1 d’une caméra est l’idéal pour
avoir une photo claire et sans perte de précision. Le déplacement vertical de la caméra jouera le
rôle du zoom tout en respectant l’échelle désirée.
Le système montré à la figure 3-21 se compose de quatre dispositifs:
Un tube télescopique composé de trois tubes : supérieur, central et inférieur. Il est
commandé pour la prise des photos selon les différentes distances entre la caméra et la
plaque. Le principe de ce tube va permettre d’avoir une photo selon les divers formats
des plaques avec la meilleure précision possible .
Un câble d’acier est lié à la base du tube inférieur et est utilisé pour soulever les deux
tubes, inférieur et central.
Une bobine est un outil cylindrique qui permet l’enroulement du câble sur lui-même.
Un moteur qui est la pièce maîtresse du système, vu qu’elle est responsable de faire
tourner la bobine. Celle-ci commande le câble pour monter et descendre le tube afin de
manipuler la position de la caméra.
Le démarrage du moteur actionnera la rotation de la bobine , ainsi le câble s’enroulera autour de
celle-ci. Cette opération va permettre le levage du tube inférieur, jusqu’à l’impact avec le tube
central. Le tube inférieur va continuer de monter, ensuite il va pousser le tube central jusqu’à
l’impact avec le tube supérieur.
La rotation du moteur dans le sens contraire actionnera la descente du tube.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 47
Figure 3- 21: Dessin d'un tube télescopique lié avec un moteur.
Choix du moteur : Le choix du moteur va se baser sur sa vitesse de rotation et le couple qu’il
développe. Les calculs ci-dessous montrent les caractéristiques du moteur qui va être le plus
approprié à cette installation.
La masse du tube inférieur additionnée à la masse de tube central est égale à 15,84 kg.
La masse de la caméra additionnée à la masse de la plateforme d’attache de l’appareil auquel
le câble sera fixé est estimée à 2 kg.
D’après le principe de la seconde loi de Newton, la force minimale développée est 𝐹𝐹 =
(15,84 𝑘𝑘𝑘𝑘 + 2 𝑘𝑘𝑘𝑘) ∗ 9,8 𝑁𝑁𝑘𝑘𝑘𝑘
= 155,23 𝑁𝑁.
La longueur totale mesurée du câble est 𝐿𝐿𝐷𝐷= 6,6 𝑚𝑚
La longueur du câble entouré sur la bobine est 𝐿𝐿𝐷𝐷= 4,4 𝑚𝑚
Le diamètre de la bobine est : 𝑑𝑑𝑏𝑏 =50 𝑚𝑚𝑚𝑚, 𝐷𝐷𝑓𝑓𝐷𝐷𝐷𝐷 𝑓𝑓𝐷𝐷 𝐻𝐻𝐷𝐷𝑦𝑦𝑓𝑓𝐷𝐷 𝑑𝑑𝐷𝐷 𝑓𝑓𝐷𝐷 𝑏𝑏𝑓𝑓𝑏𝑏𝐷𝐷𝐷𝐷𝐷𝐷 𝐷𝐷𝐷𝐷𝐷𝐷 𝐻𝐻𝑏𝑏 = 25 𝑚𝑚𝑚𝑚. Le
couple 𝐶𝐶 développe par le moteur est :

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 48
𝐶𝐶 = 𝐹𝐹 ∗ 𝐻𝐻𝑏𝑏 ( 3.4)
𝐶𝐶 = 155,23𝑁𝑁 ∗ 0,025 𝑚𝑚 = 3,88 𝑁𝑁.𝑚𝑚
La vitesse linéaire du tube est estimée à 𝑣𝑣 = 0,02 𝑚𝑚/𝐷𝐷. La vitesse du moteur 𝜔𝜔 est obtenue par
l’équation suivante:
𝑣𝑣 = 𝜔𝜔 × 𝐻𝐻𝑏𝑏 (3.5)
Alors,
0,02𝑚𝑚𝐷𝐷
= 𝜔𝜔 ∗ 0,025𝑚𝑚
𝜔𝜔 = 0,8 𝐻𝐻𝐷𝐷𝑑𝑑𝐷𝐷
Après une recherche sur le marché, le moteur à engrenages des axes parallèles 24A-D [8] sera
compatible et fournira une vitesse de 0,8 𝐻𝐻𝐷𝐷𝑑𝑑𝐷𝐷
et un couple de 3,88 𝑁𝑁.𝑚𝑚
𝐶𝐶 = 3,88 𝑁𝑁.𝑚𝑚 = 34,33 𝑓𝑓𝑏𝑏 − 𝐷𝐷𝐷𝐷 ≈ 40 𝑓𝑓𝑏𝑏𝐷𝐷𝐷𝐷
𝜔𝜔 = 0,8 𝐻𝐻𝐷𝐷𝑑𝑑𝐷𝐷
= 7,64 𝐻𝐻𝑟𝑟𝑚𝑚 ≈ 14 𝐻𝐻𝑟𝑟𝑚𝑚
Les deux paramètres C et ω seront la base du choix relative au moteur (Figure 3-22).

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 49
Figure 3- 22: Descriptions du moteur 24A-D à axes parallèles [8].
Résistance du fil : L’étude de résistance des matériaux sera limitée sur la résistance du câble
d’acier utilisé. Ce câble sera fixé à la plateforme d’attache de la caméra. Le diamètre utilisé sera
de dc =1 mm et aura une limite d’écoulement 1770𝑁𝑁 𝑚𝑚𝑚𝑚2.⁄ Le calcul du facteur de sécurité
ci-dessous confirme la résistance du câble pour soulever une charge de 15,84 kg.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 50
Figure 3- 23: Caméra et système de fixation
Il s’agit d’un câble en tension. La seule force appliquée au câble est la contrainte longitudinale.
L’équation [9] qui modélise la force maximale que le câble devra supporter est :
σy = FA
(3.6)
Donc la force maximale sera :
Fmax ≤ SY × A
où SY est la limite d′écoulement en MPa, et A la section du câble en mm2 et Fmax est la force
maximale que le câble peut supporter en N.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 51
Fmax ≤ 1770 N
mm2 × π × 1mm2
4 = 1389,45 N
Le facteur de sécurité selon TRESCA est: FS = SY2τmax
Où :
τmax :𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂𝐂 de 𝐜𝐜𝐂𝐂𝐜𝐜𝐂𝐂𝐂𝐂𝐜𝐜𝐜𝐜𝐂𝐂𝐜𝐜𝐂𝐂𝐂𝐂𝐂𝐂 𝐜𝐜𝐂𝐂𝐦𝐦𝐂𝐂𝐜𝐜𝐂𝐂𝐜𝐜𝐂𝐂.
Le cas présenté ci-dessus est le cas d’un chargement uni-axial :
σ2 = σy = 155,23 𝑁𝑁
π × 1mm2
4
= 197,47N
mm2
σ1 = σ3 = 0 MPa
τmax =σ2
2
τmax =197,47 N
mm2
2= 98,73 MPa
FS =1770 N
mm 2
2 x 98,73 Nmm 2
= 8,96.
Le facteur de sécurité selon Von Mises est: FS = SYσE
σE = 1√2
x �(σ1 − σ2)2 + (σ2 − σ3)2 + (σ3 − σ1)2
σ1 = σ3 = 0 Nmm 2 et σ2= 197,47 N
mm 2
σE = σ2 = 197,47 Nmm 2
où σE est la contrainte effective.
σ1, σ2,σ3 sont les Contraintes principales.
FS =1770 N
mm 2
197,47 Nmm 2
= 8,96.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 52
Le résultat obtenu par ce facteur de sécurité affirme que le câble d’acier choisi peut supporter
une charge 8 fois plus grande par rapport à la charge réelle F = 155,23 N.
Manipulation du moteur : L’exécution d’un schéma électrique est nécessaire pour la
manipulation du moteur. Voir la figure (3-24) suivante :
Figure 3- 24: Montage électrique permet la manipulation du moteur.
Pour commander les mouvements du moteur, soit la descente ou la montée, une installation
électrique doit être mise en œuvre. Afin de protéger l’opérateur, deux circuits différents vont
être installés : le circuit de commande et le circuit de puissance. Le schéma présenté sur la
figure 3-24 montre un exemple de circuit qui peut être utilisé pour cette raison. La manipulation
du moteur se fait de façon automatique à travers une simple impulsion sur les deux boutons
poussoirs en question (BP1 et BP2).
Il existe plusieurs méthodes de commande. Cependant, il faut respecter les normes afin de
garder une certaine marge de sécurité pour l’opérateur et d’annuler tout risque persistant. C’est
pourquoi le circuit de puissance doit être isolé complètement du circuit de commande par
l’intermédiaire des relais électromécaniques.
Mode de fonctionnement : Une impulsion sur l’interrupteur BP1 provoque la rotation du moteur
dans le sens horaire. Ce qui lèvera le tube télescopique. Par la suite, le mouvement continu de
façon régulière et avec une vitesse constante jusqu’à la position limite haute. À ce moment, le
capteur de position CN2 est actionné, cela coupe l’alimentation du moteur. Par contre, VR2 sert
à verrouiller la rotation du moteur dans le sens contraire afin d’éviter un court-circuit. Donc,
toute impulsion sur le BP2 sera sans effet si le BP1 est actionné en parallèle.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 53
Le mouvement du moteur dans le sens antihoraire sera effectué de la même façon. Une
impulsion sur le BP2 provoque la rotation du moteur dans le sens antihoraire ce qui descendra
le tube télescopique, le mouvement continu de façon régulière avec une vitesse précise, jusqu’à
la position limite en bas. En ce moment, le capteur de position CN1 est actionné, ce qui coupe
l’alimentation du moteur. Par contre, VR1 sert à verrouiller la rotation du moteur dans le sens
contraire afin d’éviter un court-circuit. Donc, toute impulsion sur le BP1 sera sans effet si le
BP2 est actionné en parallèle.
Tableau 3- 4 : Un tableau du représente les composantes utilisées sur le montage électrique.
Symbole composantes
Rth Relais thermique.
BP1 Bouton poussoir pour actionner le moteur
sens horaire.
BP2 Bouton poussoir pour actionner le moteur
sens antihoraire.
VR1 Verrouillage électrique.
VR2 Verrouillage électrique.
CN2 Capteur de position haut.
CN1 Capteur de position bas.
Bo Bobine.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 54
3. 2. 8. Fixation avec une plaque ¼ po pliée
Comme deuxième alternative de fixation, l’équipe a décidé de fixer l’appareil au plafond qui se
trouve à une élévation de 7,44 m. Une plaque pliée en forme de L avec un angle de 45°
extérieur viendra fixer l’appareil photo au plafond. Le dessin explicatif (Figure 3-24) ci-
dessous représente la caméra Lumenera choisie assemblée à sa fixation. Pour les dimensions de
la plaque, il est possible de vérifier à l’annexe 2.
Figure 3- 25: Caméra et sa fixation.
3. 2. 9. Étude des coûts
Le tableau 5.3 présente le coût des trois solutions proposées. Le prix de la caméra Cognex est
une estimation offerte par M. Marc-André. Il a donné les prix lors d’une réunion aux locaux de
l’entreprise Cadence Automatisation, à Montréal (distributeur des caméras Cognex). La
soumission détaillée n’a pas encore été reçue. Pour les prix des autres composantes choisies, ils
ont tous été certifiés.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 55
Tableau 3- 5 : Évaluation des coûts des solutions proposées.
Solutions Équipements Coût
d’équipements Coût total
Relevé dimensionnel
des plaques par
numérisation
Ordinateur de base. 500 $
3210 $
Support de fixation. 45 $
Logiciel de numérisation
DigXY. 30 $
Caméra industrielle. 2595 $
Frais d’installation 40 $
Relevé dimensionnel
des plaques par
Smart-Cam
Ordinateur de base. 500 $
3205 $
Support de fixation. 45 $
Logiciel Smart –Cam. 25 $
Caméra industrielle. 2595 $
Frais d’installation 40 $
Relevé dimensionnel
des plaques par
caméra Cognex
Caméra Cognex.
Frais d’installation 30000$ 30000 $
Le prix de 30000 $ (voir annexe 2) inclus une formation de 50 heurs sur la programmation de la
caméra. Cette formation pourrait être tenue au laboratoire de l’entreprise (Cadence
automatisation).
Le prix des deux premières solutions est un pris mois cher par rapport au prix de la troisième
solution.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 56
3. 2. 10. Santé et sécurité
Comme le veut l’éthique, un bon ingénieur se doit de prévoir un aspect santé et sécurité dans la
réalisation de son projet.
C’est effectivement dans cette optique que plusieurs décisions ont été prises quant au choix
relatif à la conception. Parmi ces décisions, le choix de la fixation de la caméra, deux choix de
support de fixation ont été conçus. Un support fixe et un autre mobile entre autres le bras
télescopique. Le bras télescopique offre une meilleure qualité quant à la prise de photos, cela
s’explique par le gain en termes de distance entre l’objectif de la caméra et de la plaque.
Cependant, malgré l’avantage qu’offre ce support, il n’a pas pu être adopté dans la solution
finale et cela pour des raisons sécuritaires. Il se trouve que sur la longueur de l’usine, un pont
roulant est installé. Le risque d’accident avec le bras télescopique est donc élevé. Cela dit : il
faudrait que les machinistes de l’usine fassent attention et prennent le soin de vérifier que le
tube est effectivement en position haute avant de diriger le pont roulant vers sa direction. Il est
clair que cette manipulation n’est pas très commode pour un milieu de travail comme celui de
Métal Marquis qui cherche à avoir une production de masse et un gain de temps optimal dans
ses opérations. Ce sont ces facteurs qui nous ont poussés à choisir un support fixe au-dessus des
rails du pont roulant. Cela éviterait toutes sortes d’accidents et n’encombrerait pas le travail du
reste de l’équipe.
Il est aussi intéressant d’ajouter à notre intervention que la prise de photos par ordinateur
devrait se faire par le machiniste responsable de la table de coupe plutôt que par un autre
intervenant, car il est le seul à savoir l’avancement de ses travaux et à juger quand la plaque
doit être remise à l’entrepôt.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 57
Chapitre IV : Conclusion et recommandations.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 58
4. 1. Conclusion
Ce projet avait comme mandat d’éliminer les relevés manuels effectués par l’opérateur de la
table de coupe, afin de le remplacer par des relevés automatiques.
Après plusieurs recherches et diverses discussions avec les professeurs, la conclusion suivante a
été prise : un système de vision sera un outil intéressant pour la réalisation de ce projet. L’idée a
été développée à l’aide de logiciels de reconnaissance d’image.
Pour ce faire, trois solutions ont été trouvées. La première étant un relevé dimensionnel des
plaques par ordinateur. La seconde étant l’application directe du logiciel Smart-Cam.
Finalement, la troisième est l’implantation d’un système de vision caméra COGNEX.
Ensuite, les deux premières solutions ont été choisies par le client et une étude effectuée sur les
deux solutions a été réalisée. Pour la validation, des essais ont été effectués sur plusieurs
plaques de l’entreprise Métal Marquis. Ces essais ont été réalisés sur les deux solutions.
Finalement, la première solution soit le relevé dimensionnel des plaques, a été choisie par le
client, suite à ses avantages de coût et a sa facilité de manipulation. Il est question d’analyser la
photo d’une plaque par un logiciel de numérisation DigXY. Les données sont ensuite
transmises au logiciel de fabrication mécanique Inventor pour obtenir la forme et les
dimensions de la plaque. Finalement, deux choix de fixation ont été étudiés : une avec la
conception d’un bras télescopique et l’autre avec une plaque 6.35 mm (¼ po) pliée.
Dans la formation en génie électromécanique, le traitement d’image n’est pas montré dans le
cadre de ce programme. Cependant, dans ce projet, cette réflexion était nécessaire pour le
développement de la solution. C’est dans cette optique que l’apprentissage de nouvelles
connaissances, grâce à la cueillette d’informations, a été un point magistral durant la réalisation
de ce projet. Cela a apporté plusieurs nouvelles notions à l’équipe.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 59
4. 2. Recommandations
Après l’étude effectuée, une solution a été proposée pour résoudre la problématique. Cela
consiste à effectuer un relevé dimensionnel des plaques, à l’aide d’une caméra et un numériseur.
Les recommandations suivantes sont conseillées:
• Automatisation des étapes à suivre effectuées par l’opérateur de la table.
• L’entretien de la caméra.
• Accomplir une étude sur la lentille utilisée pour la conception de la caméra. Cette étude
pourrait être nécessaire pour avoir de meilleurs résultats.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 60
Références 1. JULIEN, PIERRE-ANDRÉ; Les PME à force croissance, l’exemple de17 gazelles dans
8 régions du Québec, Presse de l’université du Québec, 2002. 2. Archive de Métal Marquis.
3. Rapport d’enquête, la prévention j’y travaille! CSST,
<http://centredoc.csst.qc.ca/pdf/ad03601a.pdf.>, consulté le 2009-07-01
4. Images bitmap et images vectorielles, <http://www.commentcamarche.net/contents/video/vector.php3>, consulté le 2009-06-04, Dernière mise à jour : 2008-10-14
5. FRANCE ,Gagnon; L’interprétation des photosgraphies aériennes méthode et application, Presses de Centre collégial de développement de matériel didactique (CCDMD), 2000.
6. Cognex,<http://www.cognex.com/ProductsServices/VisionSystems/InSightAlt.aspx?id=1750&langtype=1036>, consulté le 2009-05-28
7. -Thunderhead Engineerin, <http://images.google.ca/imgres?imgurl=http://www.thunderheadeng.com/digxy/snap.gif&imgrefurl=http://www.thunderheadeng.com/digxy.html&usg=__plgBnSBfKzNsybmY5ih_MN8PyEc=&h=601&w=799&sz=38&hl=fr&start=4&um=1&tbnid=zLUnhq35-hu90M:&tbnh=108&tbnw=143&prev=/images%3Fq%3DDigxy%26hl%3Dfr%26sa%3DN%26um%3D1> consulté le 2009-07-08.
8. Bobine Eléctric Company Catalogue S-1, édition 2003.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 61
9. BAZERGUI, André ; Résistance des matériaux ,Troisième édition, Presses
internationales, 2002.
10. BTECH Support plafond inclinable et téléscopique, base 140x140mm, BT7678, BTech, < http://droit-finances.commentcamarche.net/guide/608221367-btech-support-plafond-inclinable-et-telescopique-base-140x140mm-bt7678-btech> consulté le 2009-07-15.
11. Chercheur pointeur point rouge Starpointer, <http://www.google.ca/imgres?imgurl=http://www.ol-optic.com/images/c1387-1.gif&imgrefurl=http://www.ol-optic.com/chercheur-pointeur-point-rouge-starpointer-p-1698.html&h=3000&w=4000&sz=374&tbnid=jce0DJLfIPOK5M:&tbnh=113&tbnw=150&prev=/images%3Fq%3Dmicrostage%2B%2Bsuport%2Bapareil%2Bphoto&hl=fr&usg=__72A8ZaVYXPMr2rDw-Kttnzm6yNM=&ei=fFtzStaGIdPflAf9i_HzCg&sa=X&oi=image_result&resnum=1&ct=image > consulté le 2009-07-15.
12. Support appareil photo Zeiss quick-camera pour diascope, <http://www.pecheur.com/achat-support-appareil-photo-zeiss-quick-camera-pour-diascope-22731.html>, consulté le 2009-07-15.
13. Revendeur de caméra industrielle <http://www.lumenera.com/ >consulté le 2009-07-20

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 62
Annexe I

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 63
Cette photo montre la table de robot SABRE SXE y compris des convoyeurs à chaînes et des
lamelles sur table.
I- 1:Dessus de la table de coupe

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 64
Cette photo démontre la commande de contrôle programmable se trouvant au coin de la table.
Cette commande transmet au robot sabre les formes désirées coupées sur la plaque.
I- 2 : Accessoires de la table de coupe.
La photo ci-dessous montre une plaque posée au-dessus de la table, sur laquelle le robot sabre
appliquera une coupe. Les plaques présentées sur la table sont toujours fixes.
I- 3 : Plaque sur la table de coupe

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 65
La photo ci-dessous montre une rangée des plaques restantes. Chaque plaque a une référence
d’emplacement spéciale.
I- 4:Rangée des plaques
Pour déplacer les plaques des rangées vers la table de coupe, l’opérateur utilise une potence M7
et un palan de levage.
I- 5 : Potence M7 et palan.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 66
La manipulation potence M7 et le palan de levage effectué par une manette de contrôle.
I- 6 : Plaque soulevée à l'aide de la potence M7 et du palan.

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 67
Annexe II

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 68
Procédure pour afficher un tableau des points sur l’interface dulogiciel Invetor

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 69

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 70

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 71

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 72

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 73

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 74

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 75

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 76

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 77

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 78

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 79

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 79

PEI : Relevé dimensionnel automatisé des plaques
Mohammed Sehli Été 2009 Sedik Bendaoud 80









![MODULE DES SCIENCES APPLIQUÉES - Bibliothèque …bibliotheque.uqat.ca/documents/rapportsa/95.pdf · Test No. 2– Application de la charge vers l’arrière [NSVAC 207 1(a)i(B)]](https://img.pdfslide.tips/doc/110x75/5b396e007f8b9abd438e5a12/module-des-sciences-appliquees-bibliotheque-test-no-2-application-de.jpg)