Embed Size (px)
Citation preview
Universidad Ricardo Palma Facultad de Ingeniería Escuela Mecatrónica
Diseño y control de un
exoesqueleto para rehabilitación motora del
miembro Superior
Alumno: Diego Arturo Rozas Llontop
2012
2
Universidad Ricardo Palma Facultad de Ingeniería Escuela Mecatrónica
Diseño y control de un exoesqueleto para
rehabilitación motora del miembro Superior
Alumno: Diego Arturo Rozas Llontop
2012
3
Ficha técnica
Diego Arturo Rozas Llontop
Diseño y control de un exoesqueleto para rehabilitación motora del
miembro superior/ Diego Arturo Rozas Llontop
Monografía – Taller de Investigación Aplicada
Surco – Lima, Noviembre del 2012.
Estudiante de Ingeniería Mecatrónica
Profesor: José Antonio Lavado Landeo
1. Exoesqueleto 2. Interfaz 3.Mecatrónica
4
Resumen
Este proyecto se basa en la realización y en la implementación de un
exoesqueleto para todo el miembro superior, el objetivo del desarrollo de esta
tecnología es poder hacer más eficiente y ayudar con la terapia física en el
Perú, ya que diversos estudios han demostrado la decadencia y déficit de la
terapia física, ya sea por falta de capacitación del personal fisioterapeuta,
como veremos, el fisioterapeuta al realizar varias sesiones seguidas, va
perdiendo eficiencia y eficacia, y al producirse esto los resultados en el
paciente tratado no son los que deberían ser, por esto se planteó en la
implementación de un exoesqueleto que realice los movimientos de un
fisioterapeuta, para lograr la máxima eficiencia y buenos resultados en los
pacientes con pérdida del movimiento del miembro superior. Otorgando esta
tecnología a un hospital o clínicas, para que sus servicios sean más óptimos y
efectivos.
1. Exoesqueleto 2. Interfaz 3.Mecatrónica

5
Abstrac
This project is based on the realization and implementation of an exoskeleton
for the entire upper limb, the objective of development of this technology is
more efficient and able to help with physical therapy in Peru, since several
studies have shown the decline deficit of physical therapy, either due to
inadequate training of staff physical therapist, as we shall see, the physical
therapist to perform several consecutive sessions, it loses efficiency and
effectiveness, and outcomes that occur in the patient treated are those that
should be , so it is raised in the implementation of an exoskeleton to perform a
physical movements to achieve maximum efficiency and good results in
patients with loss of upper limb movement. Granting this technology to a
hospital or clinic, so that their services are more optimal and effective.
1. Exoesqueleto 2. Interfaz 3.Mecatrónica
6
Tabla de contenido
FICHA TÉCNICA ..................................................................................................................... 3
RESUMEN ................................................................................................................................. 4
ABSTRAC ................................................................................................................................. 5
INTRODUCCIÓN ..................................................................................................................... 9
CAPÍTULO I ........................................................................................................................... 11
PLANTEAMIENTO DEL PROBLEMA .......................................................................... 11
1.1. Justificación de la Investigación: .................................................................................... 11
1.2. Objetivos............................................................................................................................... 11
1.2.1 Objetivo General: ............................................................................................................ 11
1.2.2 Objetivos Específicos: ................................................................................................... 11
1.3. Planteamiento del Problema ............................................................................................. 12
1.3.1 Formulación del Problema: ........................................................................................... 12
1.3.2 Sistematización del Problema: ..................................................................................... 12
CAPÍTULO II .......................................................................................................................... 13
MARCO TEÓRICO .............................................................................................................. 13
2.1 Teoría .................................................................................................................................... 13
2.2 Anatomía del miembro superior ....................................................................................... 15
Deltoides ............................................................................................................................................... 15
2.2.1. MUSCULOS DEL BRAZO ................................................................................................ 16
Grupo anterior ...................................................................................................................................... 16
a. BICEPS BRAQUIAL ............................................................................................................... 16
b. CORACO-BRAQUIAL ........................................................................................................... 17
c. BRAQUIAL ANTERIOR ......................................................................................................... 17
GRUPO POSTERIOR: ....................................................................................................................... 18
a. TRICEPS BRAQUIAL ............................................................................................................ 18
2.2.2. MUSCULOS DEL ANTEBRAZO ..................................................................................... 19
GRUPO ANTERIOR: .......................................................................................................................... 19
a. PRONADOR CUADRADO.................................................................................................... 19
7
b. FLEXOR COMUN PROFUNDO DE LOS DEDOS ............................................................ 20
c. FLEXOR LARGO DEL PULGAR ......................................................................................... 20
d. FLEXOR COMÚN SUPERFICIAL DE LOS DEDOS ........................................................ 21
e. PRONADOR REDONDO ...................................................................................................... 22
f. MUSCULO PALMAR MAYOR ............................................................................................. 22
g. MUSCULO PALMAR MENOR ............................................................................................. 23
h. MUSCULO CUBITAL ANTERIOR ....................................................................................... 24
GRUPO EXTERNO............................................................................................................................. 24
a. MUSCULO SUPINADOR CORTO. ..................................................................................... 24
b. MUSCULO SUPINADOR LARGO O BRAQUIOBRAQUIAL ........................................... 25
c. MUSCULO RADIAL LARGO ................................................................................................ 25
d. MUSCULO RADIAL CORTO ................................................................................................ 26
GRUPO POSTERIOR: ....................................................................................................................... 26
a. ABDUCTOR LARGO DEL PULGAR ................................................................................... 26
b. EXTENSOR CORTO DEL PULGAR ................................................................................... 27
c. EXTENSOR LARGO DEL PULGAR ................................................................................... 27
d. EXTENSOR PROPIO DEL DEDO INDICE ........................................................................ 28
e. EXTENSOR COMUN DE LOS DEDOS ............................................................................. 28
f. EXTENSOR PROPIO DEL MEÑIQUE ............................................................................... 29
g. CUBITAL POSTERIOR O EXTENSOR CUBITAL DEL CARPO .................................... 29
h. MUSCULO ANCÓNEO ......................................................................................................... 30
2.3 Diseño ................................................................................................................................... 30
2.4 Estructuración ..................................................................................................................... 30
2.5 Materiales y Métodos: ........................................................................................................ 31
2.6 Desarrollo del Dispositivo ................................................................................................. 32
2.5.1 Selección del Motor ........................................................................................................... 32
1. Velocidad................................................................................................................................ 32
2. Torque ..................................................................................................................................... 32
2.5.2 Férula y sistema de Transmisión ..................................................................................... 33
2.5.3 Electrónica asociada ......................................................................................................... 33
1. Elección del microcontrolador - Arduino ...................................................................... 34
2. Etapa de acondicionamiento de la señal de giro ......................................................... 34
3. Etapa de censado................................................................................................................. 35
4. Etapa de control de potencia del motor ......................................................................... 35
2.5.4 Control Por software .......................................................................................................... 35
2.5.5 Interfaz Gráfica del Usuario .............................................................................................. 36
2.7 Funcionamiento................................................................................................................... 37
2.7.1 Diagrama de Bloques del Funcionamiento .................................................................... 38
CAPÍTULO III ......................................................................................................................... 39
HIPÓTESIS............................................................................................................................. 39
3.1 Hipótesis ............................................................................................................................... 39
8
3.2 Variables e Indicadores ..................................................................................................... 39
3.3.1 Variables ............................................................................................................................ 39
3.3.2 Indicadores ........................................................................................................................ 39
3.3 Metodología o Método a usar ........................................................................................... 40
REFERENCIAS BIBLIOGRÁFICAS: ............................................................................ 41
9
Introducción
Existen varias enfermedades y diferentes traumas físicos que dejan
deficiencias motoras en las extremidades superiores de los individuos, las
cuales requieren tratamientos de rehabilitación especializada con sesiones de
fisioterapia, llevadas a cabo por personal experto. En la actualidad, la mayoría
de estas terapias se realizan en forma manual, involucrando rutinas de
movimientos en las que se requiere esfuerzo físico por parte del fisioterapeuta,
lo que puede provocar que al final de una jornada el fisioterapeuta, por los
efectos del cansancio físico, no realice los procedimientos adecuadamente. En
algunos tipos de terapia el fisioterapeuta debe aplicar una resistencia al
movimiento del paciente, la fuerza aplicada debe ser controlada para evitar
generar una lesión mayor, además si esta no es aplicada correctamente se
puede provocar un temor en el paciente a las terapias y por ende una tensión
en los músculos y tendones afectados, lo que conlleva a un retraso significativo
en la evolución del tratamiento.
De acuerdo a las necesidades y Falencias que presentaron un conjunto
de fisioterapeutas, pacientes y especialistas en el área de rehabilitación, se
determinó que era factible desarrollar un prototipo que permitiera controlar los
movimientos del miembro superior de un paciente en rehabilitación y mantener
la responsabilidad de una terapia, independientemente del tiempo que dure la
misma y del gasto energético que esta implique.
El prototipo diseñado brinda como beneficio adicional, la posibilidad de
llevar un control cronológico de la evolución del paciente, dado que se pueden
realizar mediciones de la amplitud de los movimientos de las articulaciones de
la extremidad superior (codo, muñeca), que son almacenadas en una base de
datos. El prototipo cumple la función de reeducación de movimientos (función
pasiva), para lo cual cuenta con un banco de trayectorias programables por el
especialista de una forma sencilla, el fisioterapeuta realiza el movimiento con el
dispositivo una vez y el exoesqueleto lo repite almacenando la rutina en su
memoria.

10
El Trabajo de investigación está organizado así: en el capítulo I se
explica el planteamiento del problema y los objetivos de esta investigación en el
capítulo II se nombran las variables, indicadores e hipótesis, en el capítulo III se
presenta una breve descripción de la biomecánica del miembro superior, las
consideraciones para el diseño mecánico del prototipo y el diseño del sistema
de mando y control, en el capítulo IV se presentan los resultados obtenidos al
utilizar el dispositivo y las conclusiones.
11
CAPÍTULO I
PLANTEAMIENTO DEL PROBLEMA
En este capítulo explicamos el porqué de esta investigación, haciendo énfasis
en los objetivos y justificación del problema
1.1. Justificación de la Investigación:
Esta investigación se está realizando con el propósito de proporcionar
asistencia a los usuarios con pérdida del movimiento del miembro superior
facilitando la adquisición de uno de éstos sistemas de rehabilitación, ya que
generará los movimientos de una terapia física de rehabilitación, haciendo que
personas de bajos recursos puedan acceder a este programa de rehabilitación.
1.2. Objetivos
1.2.1 Objetivo General:
Desarrollar un exoesqueleto con capacidad de generar movimientos de
rehabilitación que permita realizar ejercicios para recuperar la movilidad del
miembro superior, haciendo que la elaboración del exoesqueleto sea lo más
económico posible para el alcance de todos los usuarios.
1.2.2 Objetivos Específicos:
1. Describir los movimientos que realizara la exoesqueleto.
2. Determinar los materiales más propicios para elaborar el exoesqueleto.
3. Diseñar y construir la electrónica del dispositivo móvil utilizando un
Microcontrolador y motores.
4. Diseñar y construir la mecánica del dispositivo móvil.
5. Definir el protocolo de comunicaciones niveles físico y de enlace.
6. Diseñar y desarrollar el software en el ordenador de control que abarque
las funciones de monitorización, interfaz de usuario, control del robot e
inteligencia del sistema.
12
7. Hacer un estudio poblacional, para sacar un precio que pueda ser fácil de
adquirir por los usuarios.
1.3. Planteamiento del Problema
1.3.1 Formulación del Problema:
La terapia física en el Perú, enfocado en la carencia de un sistema de
rehabilitación automática para el miembro superior (exoesqueleto). Nos motiva
a Desarrollar un exoesqueleto que permitirá a los usuarios recuperar el
movimiento del miembro superior, ya que un fisioterapeuta puede presentar
déficit en el proceso de rehabilitación, por motivos como la aplicación
inadecuada de fuerzas en el tratamiento, siendo para esta actividad necesaria
la precisión para llevar a cabo los movimientos.
1.3.2 Sistematización del Problema:
1. ¿Qué movimientos realizara el exoesqueleto?
2. ¿Cuáles son los materiales más propicios para realizar el exoesqueleto?
3. ¿Cómo diseñar y construir la electrónica del dispositivo móvil utilizando un
Microcontrolador y motores paso a paso?
4. ¿Cómo diseñar y construir la mecánica del dispositivo móvil?
5. ¿Cómo definir el protocolo de comunicaciones niveles físico y de enlace?
6. ¿Cómo diseñar y desarrollar el software en el ordenador de control que
abarque las funciones de monitorización, interfaz de usuario, control del
robot e inteligencia del sistema?
13
CAPÍTULO II
MARCO TEÓRICO
En esta capitulo trataremos los fundamentos teóricos, tratando con el
funcionamientos, y el desarrollo que tendrá la realización del proyecto.
2.1 Teoría
La teoría usada para este proyecto concierne tanto al campo de la
medicina como al de la ingeniería. Al generarse una fractura o alguna
mutilación al hueso y al musculo este necesita una recuperación la cual se
encarga de mejorar completamente el miembro, las técnicas usadas son
muchas como lo son la rehabilitación en piscina que se encarga de generar
movimientos suaves y detallados los cuales no se podrían realizar si la persona
se encuentra parada o sentada ya que el cuerpo y los músculos no se
encuentran totalmente en relajo razón por la cual se usa la piscina. Por otra
parte existen también las técnicas que se hacen fuera del agua las cuales
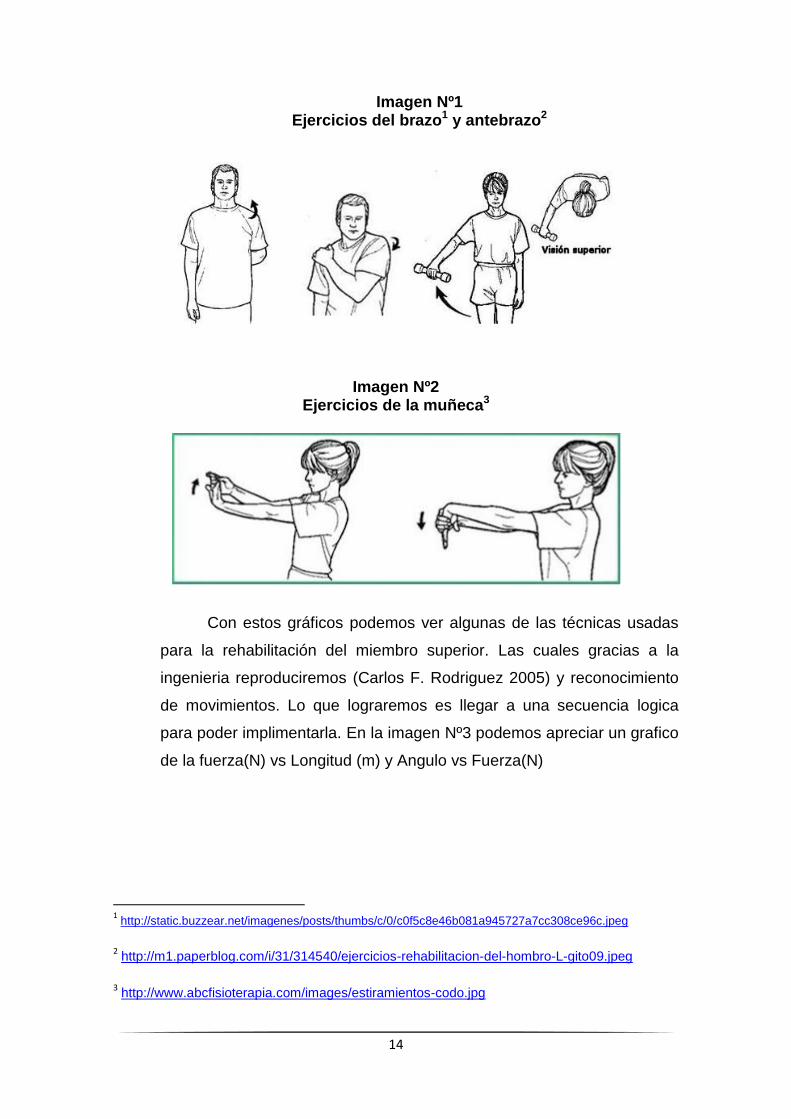
constan de (DELMAS 2009) ejercicios que se muestran en la imagen Nº1, la
muñeca ejercicios que se muestran en la imagen Nº2
14
Imagen Nº1 Ejercicios del brazo1 y antebrazo2
Imagen Nº2 Ejercicios de la muñeca3
Con estos gráficos podemos ver algunas de las técnicas usadas
para la rehabilitación del miembro superior. Las cuales gracias a la
ingenieria reproduciremos (Carlos F. Rodriguez 2005) y reconocimiento
de movimientos. Lo que lograremos es llegar a una secuencia logica
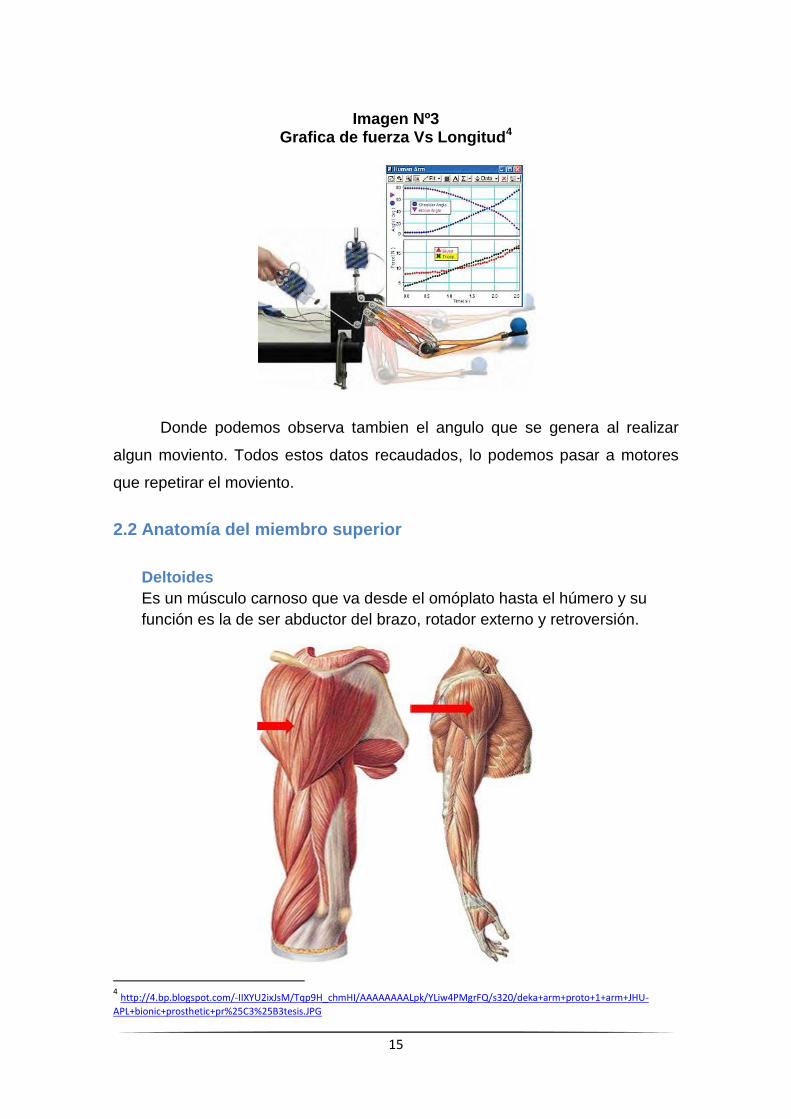
para poder implimentarla. En la imagen Nº3 podemos apreciar un grafico
de la fuerza(N) vs Longitud (m) y Angulo vs Fuerza(N)
1 http://static.buzzear.net/imagenes/posts/thumbs/c/0/c0f5c8e46b081a945727a7cc308ce96c.jpeg
2 http://m1.paperblog.com/i/31/314540/ejercicios-rehabilitacion-del-hombro-L-gito09.jpeg
3 http://www.abcfisioterapia.com/images/estiramientos-codo.jpg
15
Imagen Nº3 Grafica de fuerza Vs Longitud4
Donde podemos observa tambien el angulo que se genera al realizar
algun moviento. Todos estos datos recaudados, lo podemos pasar a motores
que repetirar el moviento.
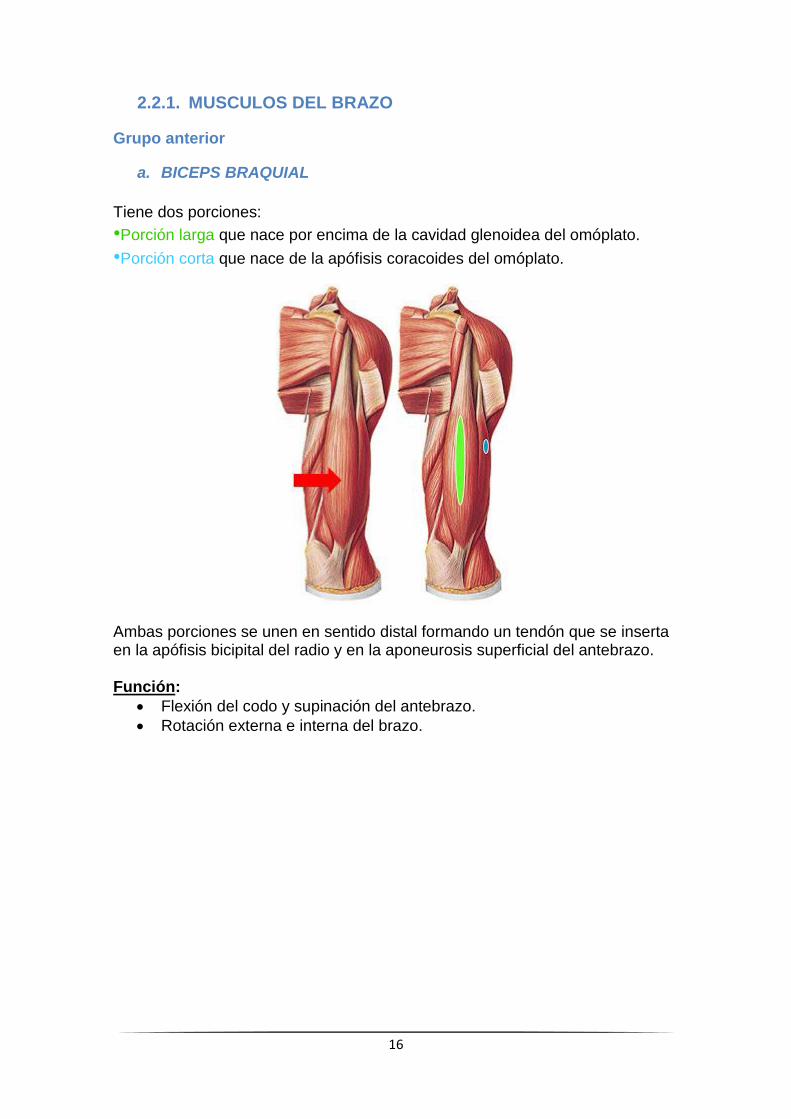
2.2 Anatomía del miembro superior
Deltoides
Es un músculo carnoso que va desde el omóplato hasta el húmero y su
función es la de ser abductor del brazo, rotador externo y retroversión.
4 http://4.bp.blogspot.com/-IIXYU2ixJsM/Tqp9H_chmHI/AAAAAAAALpk/YLiw4PMgrFQ/s320/deka+arm+proto+1+arm+JHU-
APL+bionic+prosthetic+pr%25C3%25B3tesis.JPG
16
2.2.1. MUSCULOS DEL BRAZO
Grupo anterior
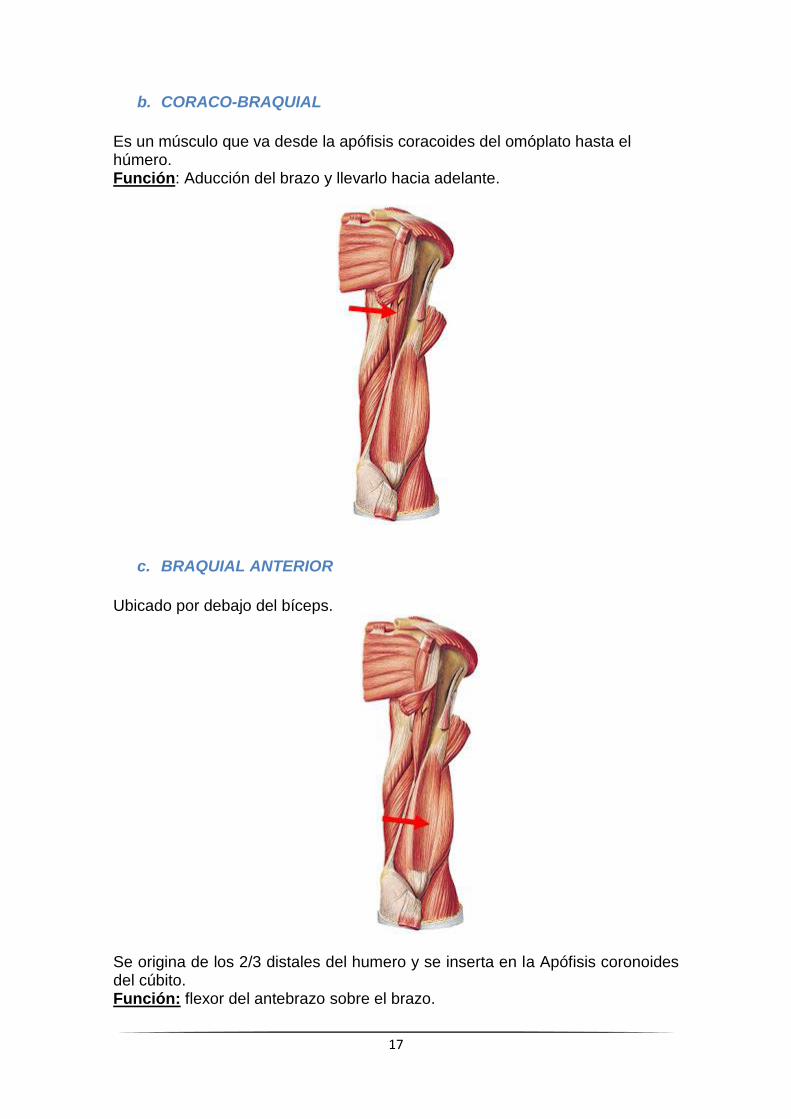
a. BICEPS BRAQUIAL
Tiene dos porciones:
•Porción larga que nace por encima de la cavidad glenoidea del omóplato.
•Porción corta que nace de la apófisis coracoides del omóplato.
Ambas porciones se unen en sentido distal formando un tendón que se inserta en la apófisis bicipital del radio y en la aponeurosis superficial del antebrazo. Función:
Flexión del codo y supinación del antebrazo.
Rotación externa e interna del brazo.
17
b. CORACO-BRAQUIAL
Es un músculo que va desde la apófisis coracoides del omóplato hasta el húmero. Función: Aducción del brazo y llevarlo hacia adelante.
c. BRAQUIAL ANTERIOR
Ubicado por debajo del bíceps.
Se origina de los 2/3 distales del humero y se inserta en la Apófisis coronoides del cúbito. Función: flexor del antebrazo sobre el brazo.
18
GRUPO POSTERIOR:
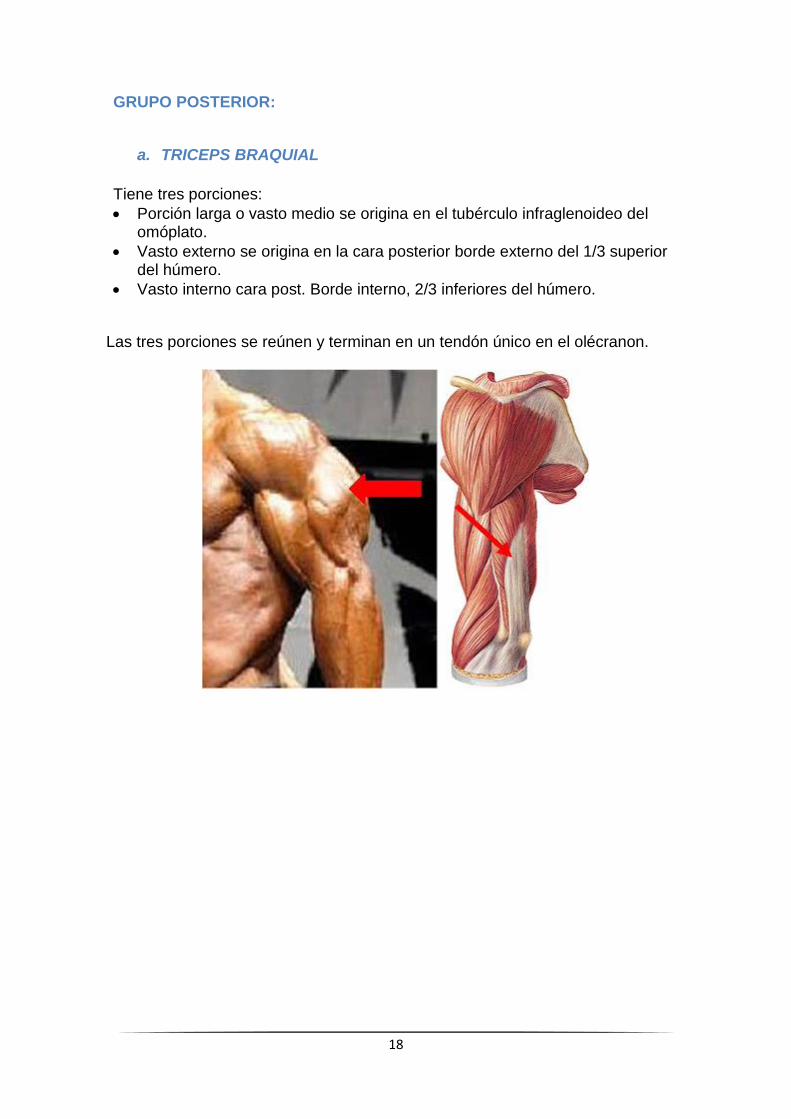
a. TRICEPS BRAQUIAL
Tiene tres porciones:
Porción larga o vasto medio se origina en el tubérculo infraglenoideo del omóplato.
Vasto externo se origina en la cara posterior borde externo del 1/3 superior del húmero.
Vasto interno cara post. Borde interno, 2/3 inferiores del húmero.
Las tres porciones se reúnen y terminan en un tendón único en el olécranon.
19
2.2.2. MUSCULOS DEL ANTEBRAZO
GRUPO ANTERIOR:
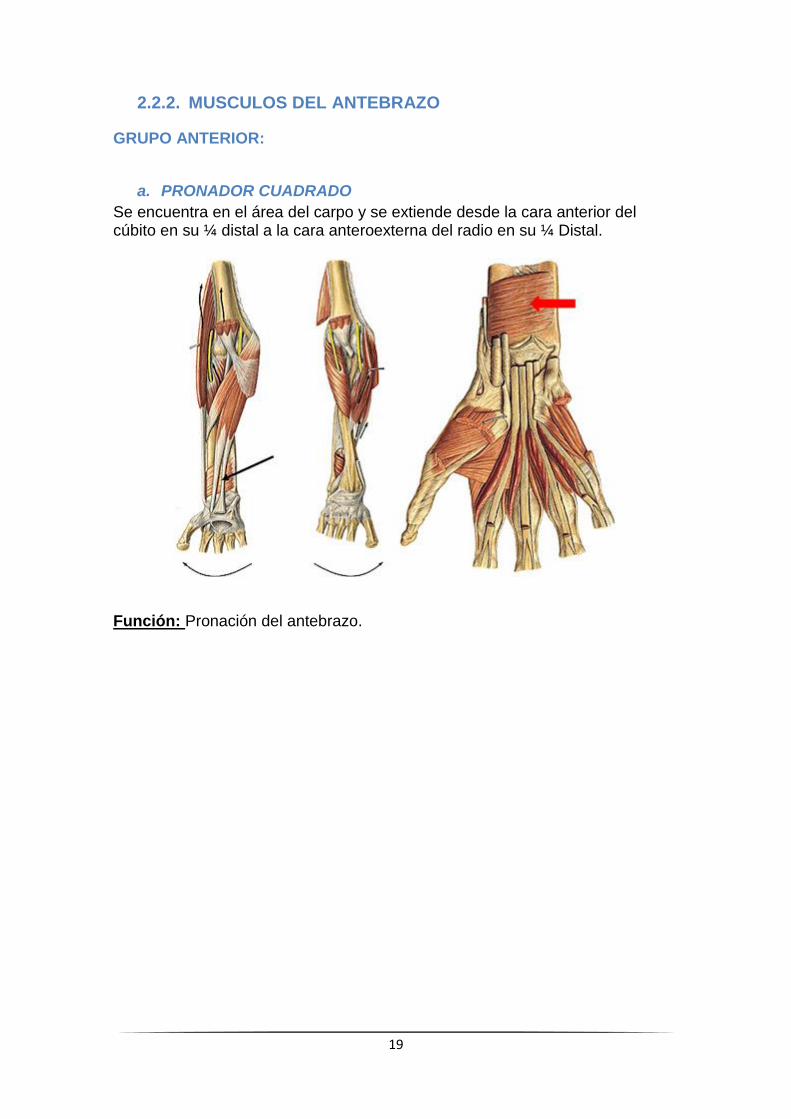
a. PRONADOR CUADRADO
Se encuentra en el área del carpo y se extiende desde la cara anterior del cúbito en su ¼ distal a la cara anteroexterna del radio en su ¼ Distal.
Función: Pronación del antebrazo.
20
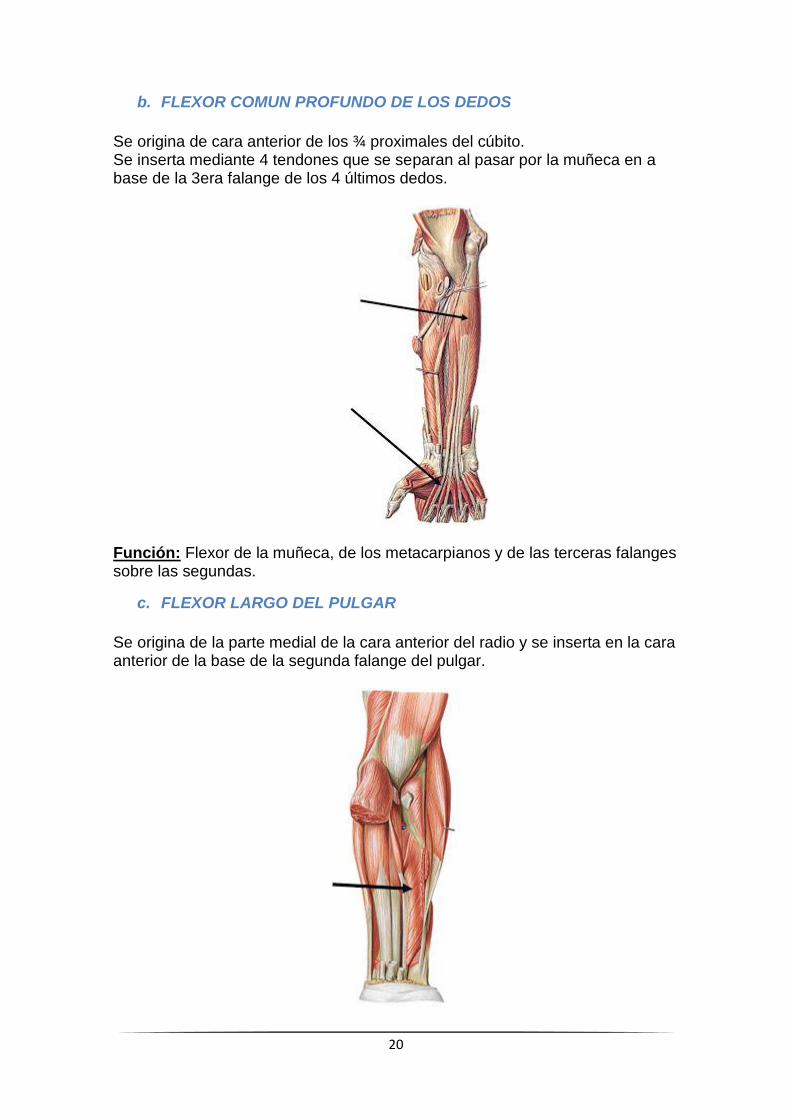
b. FLEXOR COMUN PROFUNDO DE LOS DEDOS
Se origina de cara anterior de los ¾ proximales del cúbito. Se inserta mediante 4 tendones que se separan al pasar por la muñeca en a base de la 3era falange de los 4 últimos dedos.
Función: Flexor de la muñeca, de los metacarpianos y de las terceras falanges sobre las segundas.
c. FLEXOR LARGO DEL PULGAR
Se origina de la parte medial de la cara anterior del radio y se inserta en la cara anterior de la base de la segunda falange del pulgar.
21
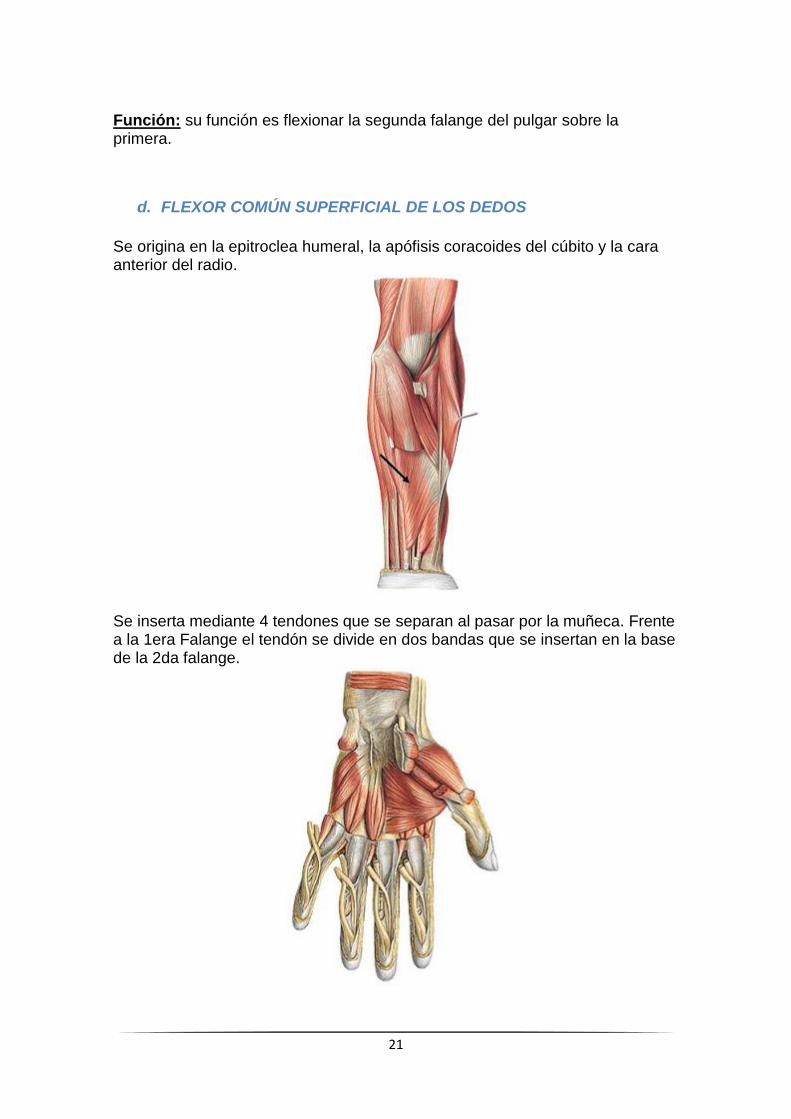
Función: su función es flexionar la segunda falange del pulgar sobre la primera.
d. FLEXOR COMÚN SUPERFICIAL DE LOS DEDOS
Se origina en la epitroclea humeral, la apófisis coracoides del cúbito y la cara anterior del radio.
Se inserta mediante 4 tendones que se separan al pasar por la muñeca. Frente a la 1era Falange el tendón se divide en dos bandas que se insertan en la base de la 2da falange.
22
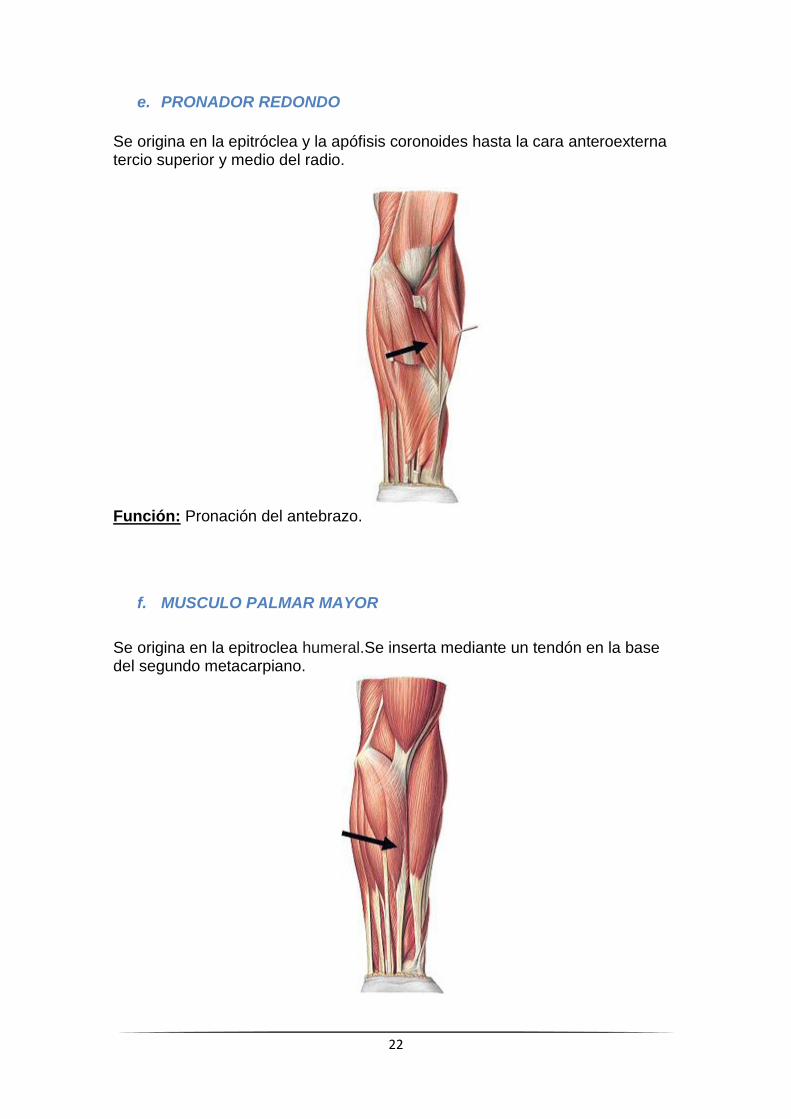
e. PRONADOR REDONDO
Se origina en la epitróclea y la apófisis coronoides hasta la cara anteroexterna tercio superior y medio del radio.
Función: Pronación del antebrazo.
f. MUSCULO PALMAR MAYOR
Se origina en la epitroclea humeral.Se inserta mediante un tendón en la base del segundo metacarpiano.
23
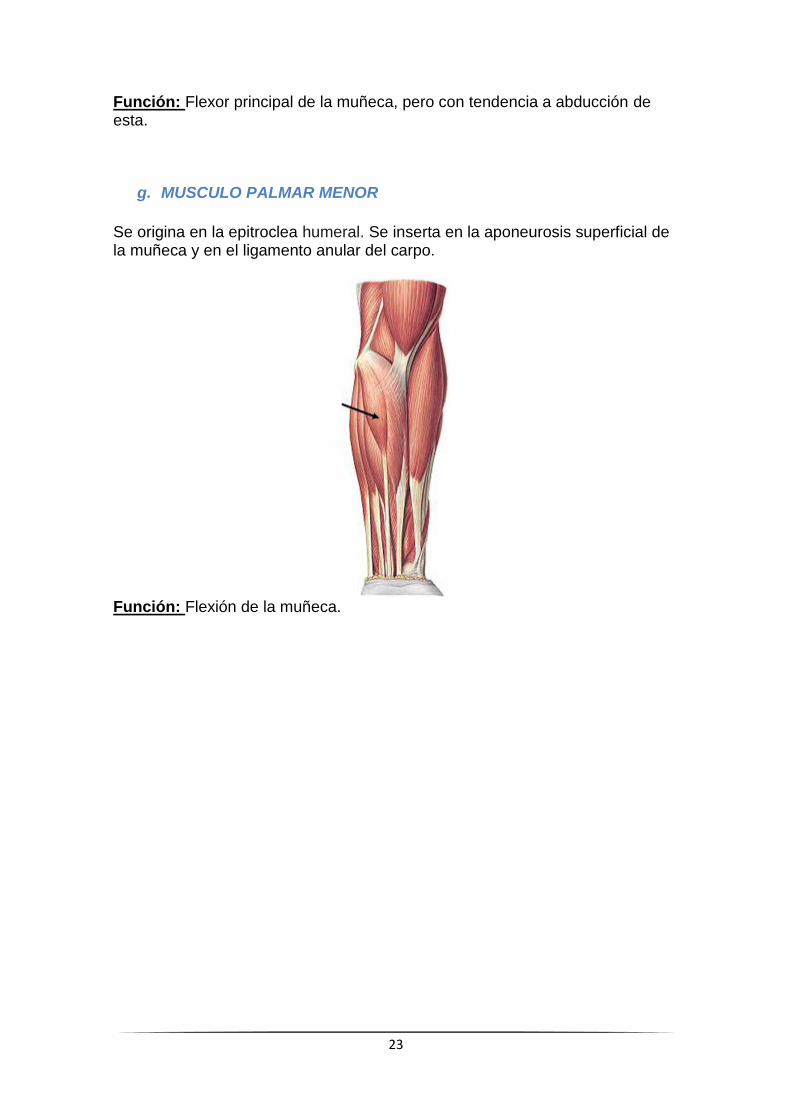
Función: Flexor principal de la muñeca, pero con tendencia a abducción de esta.
g. MUSCULO PALMAR MENOR
Se origina en la epitroclea humeral. Se inserta en la aponeurosis superficial de la muñeca y en el ligamento anular del carpo.
Función: Flexión de la muñeca.
24
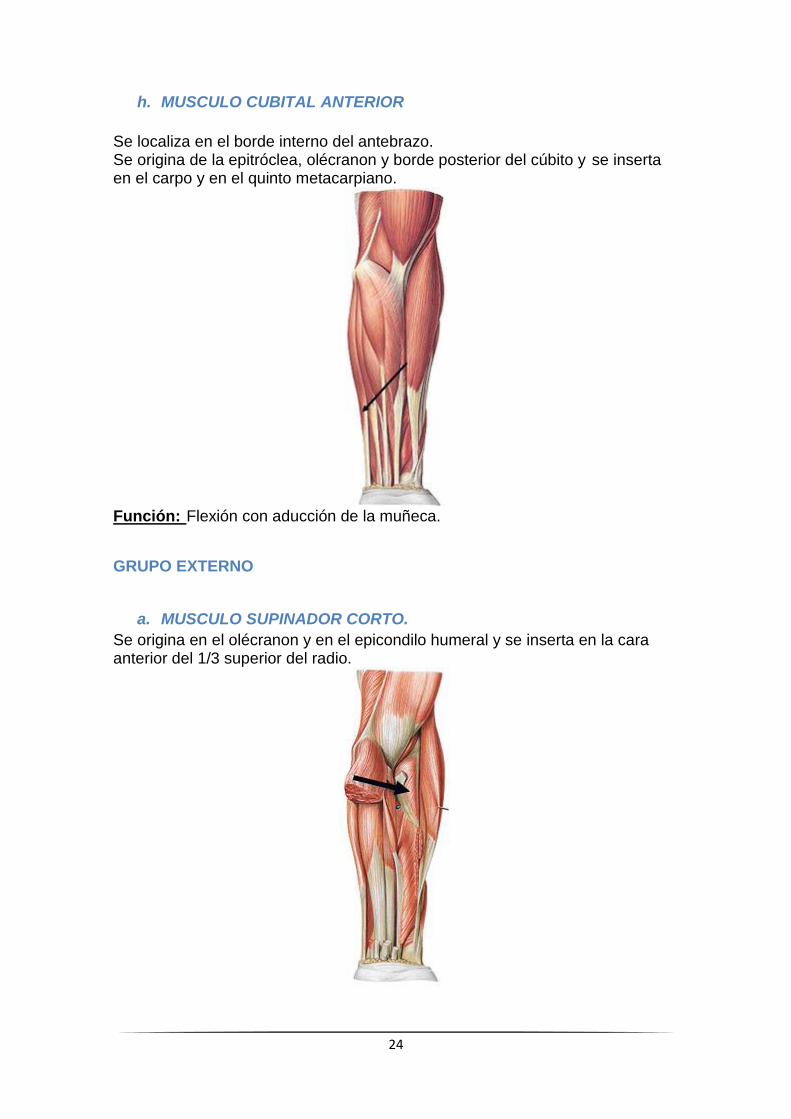
h. MUSCULO CUBITAL ANTERIOR
Se localiza en el borde interno del antebrazo. Se origina de la epitróclea, olécranon y borde posterior del cúbito y se inserta en el carpo y en el quinto metacarpiano.
Función: Flexión con aducción de la muñeca.
GRUPO EXTERNO
a. MUSCULO SUPINADOR CORTO.
Se origina en el olécranon y en el epicondilo humeral y se inserta en la cara anterior del 1/3 superior del radio.
25
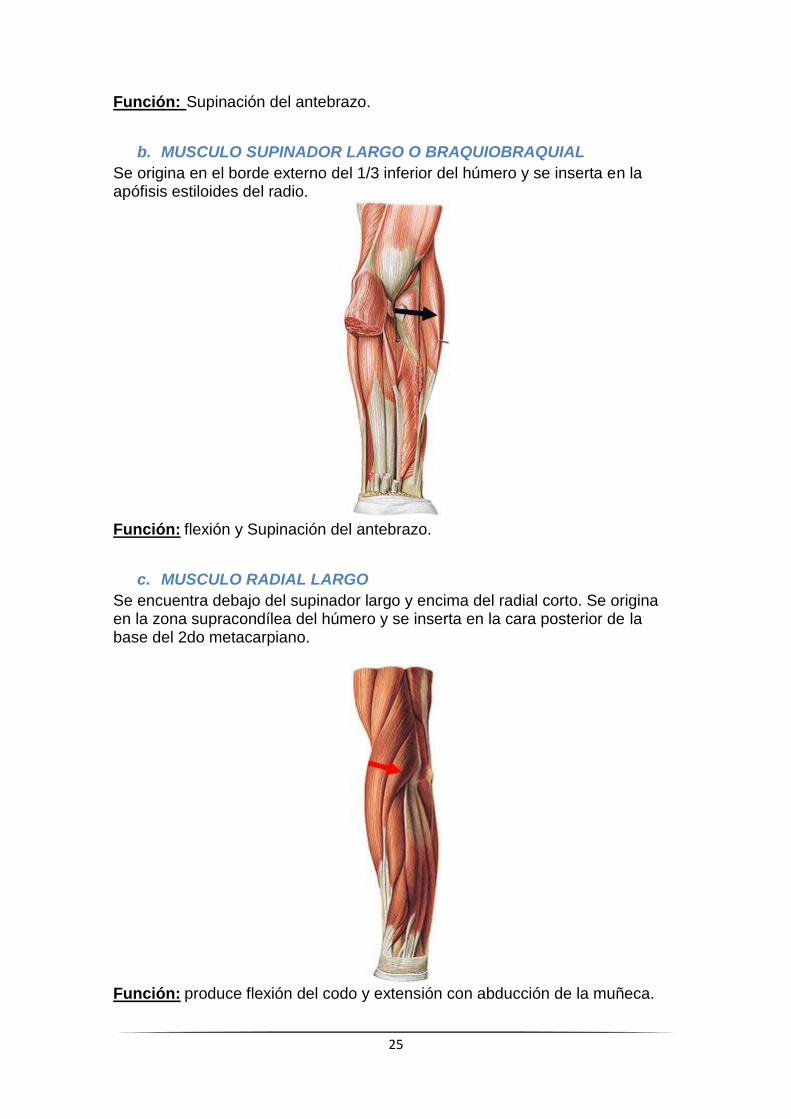
Función: Supinación del antebrazo.
b. MUSCULO SUPINADOR LARGO O BRAQUIOBRAQUIAL
Se origina en el borde externo del 1/3 inferior del húmero y se inserta en la apófisis estiloides del radio.
Función: flexión y Supinación del antebrazo.
c. MUSCULO RADIAL LARGO
Se encuentra debajo del supinador largo y encima del radial corto. Se origina en la zona supracondílea del húmero y se inserta en la cara posterior de la base del 2do metacarpiano.
Función: produce flexión del codo y extensión con abducción de la muñeca.
26
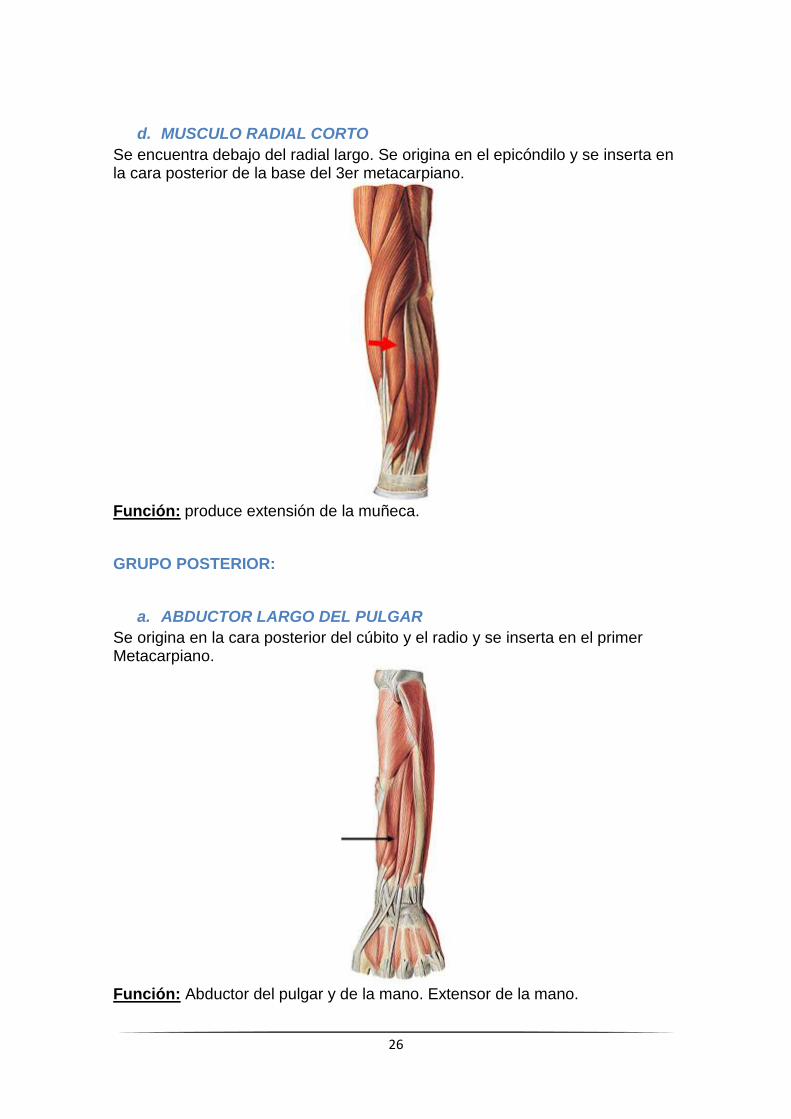
d. MUSCULO RADIAL CORTO
Se encuentra debajo del radial largo. Se origina en el epicóndilo y se inserta en la cara posterior de la base del 3er metacarpiano.
Función: produce extensión de la muñeca.
GRUPO POSTERIOR:
a. ABDUCTOR LARGO DEL PULGAR
Se origina en la cara posterior del cúbito y el radio y se inserta en el primer Metacarpiano.
Función: Abductor del pulgar y de la mano. Extensor de la mano.

27
b. EXTENSOR CORTO DEL PULGAR
Se origina de la cara posterior del cúbito y radio y se inserta en la primera falange del pulgar.
Función: Es extensor y abductor del pulgar.
c. EXTENSOR LARGO DEL PULGAR
Se origina de la cara posterior del 1/3 medio del cúbito y se inserta en la cara posterior de la base de la segunda falange del pulgar.
Función: Es extensor del pulgar.
28
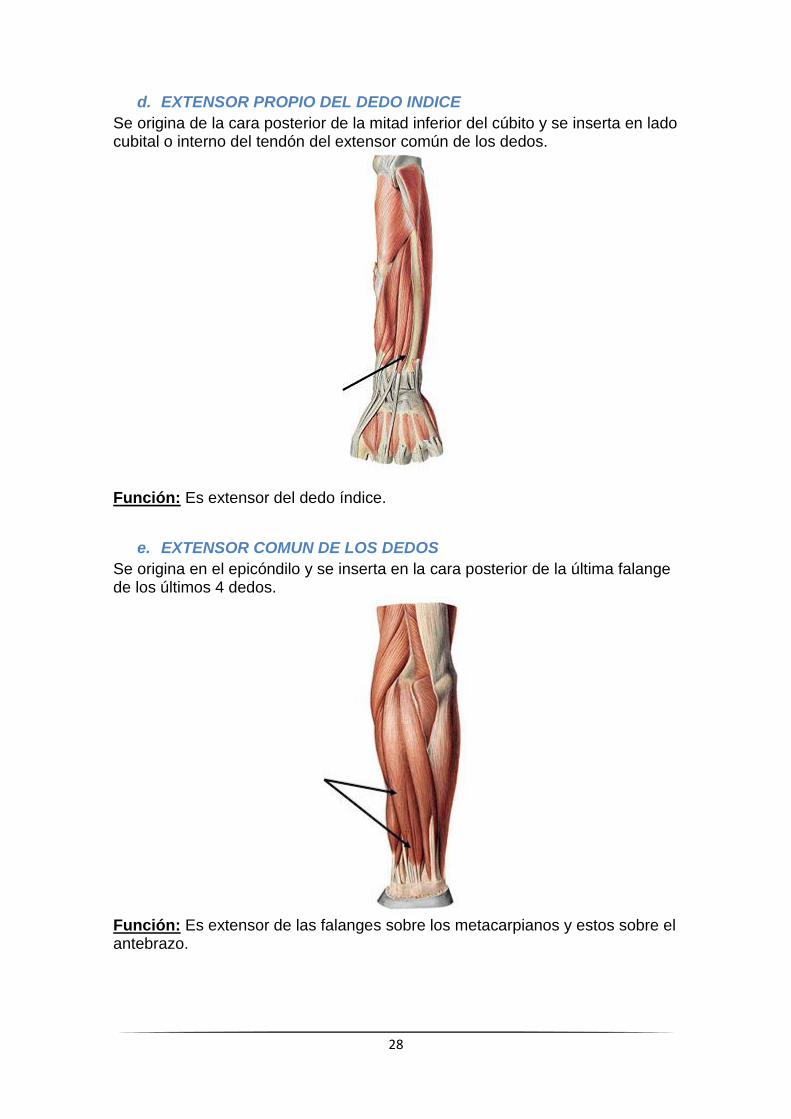
d. EXTENSOR PROPIO DEL DEDO INDICE
Se origina de la cara posterior de la mitad inferior del cúbito y se inserta en lado cubital o interno del tendón del extensor común de los dedos.
Función: Es extensor del dedo índice.
e. EXTENSOR COMUN DE LOS DEDOS
Se origina en el epicóndilo y se inserta en la cara posterior de la última falange de los últimos 4 dedos.
Función: Es extensor de las falanges sobre los metacarpianos y estos sobre el antebrazo.
29
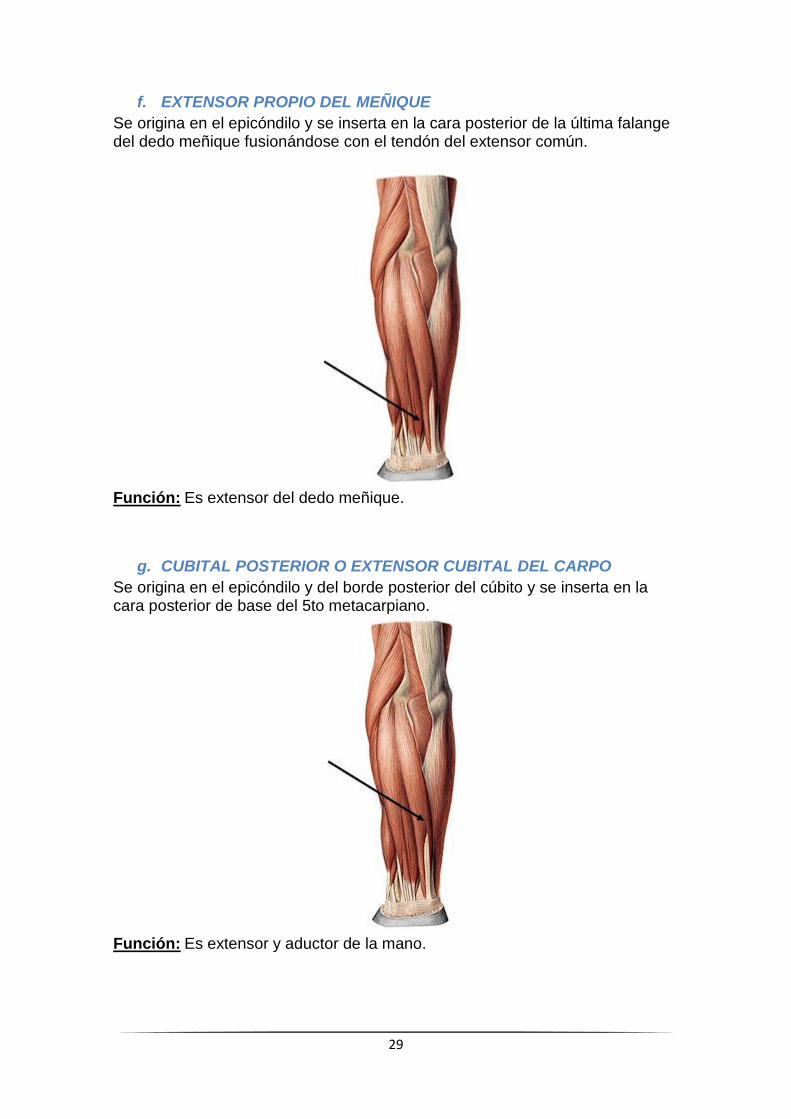
f. EXTENSOR PROPIO DEL MEÑIQUE
Se origina en el epicóndilo y se inserta en la cara posterior de la última falange del dedo meñique fusionándose con el tendón del extensor común.
Función: Es extensor del dedo meñique.
g. CUBITAL POSTERIOR O EXTENSOR CUBITAL DEL CARPO
Se origina en el epicóndilo y del borde posterior del cúbito y se inserta en la cara posterior de base del 5to metacarpiano.
Función: Es extensor y aductor de la mano.
30
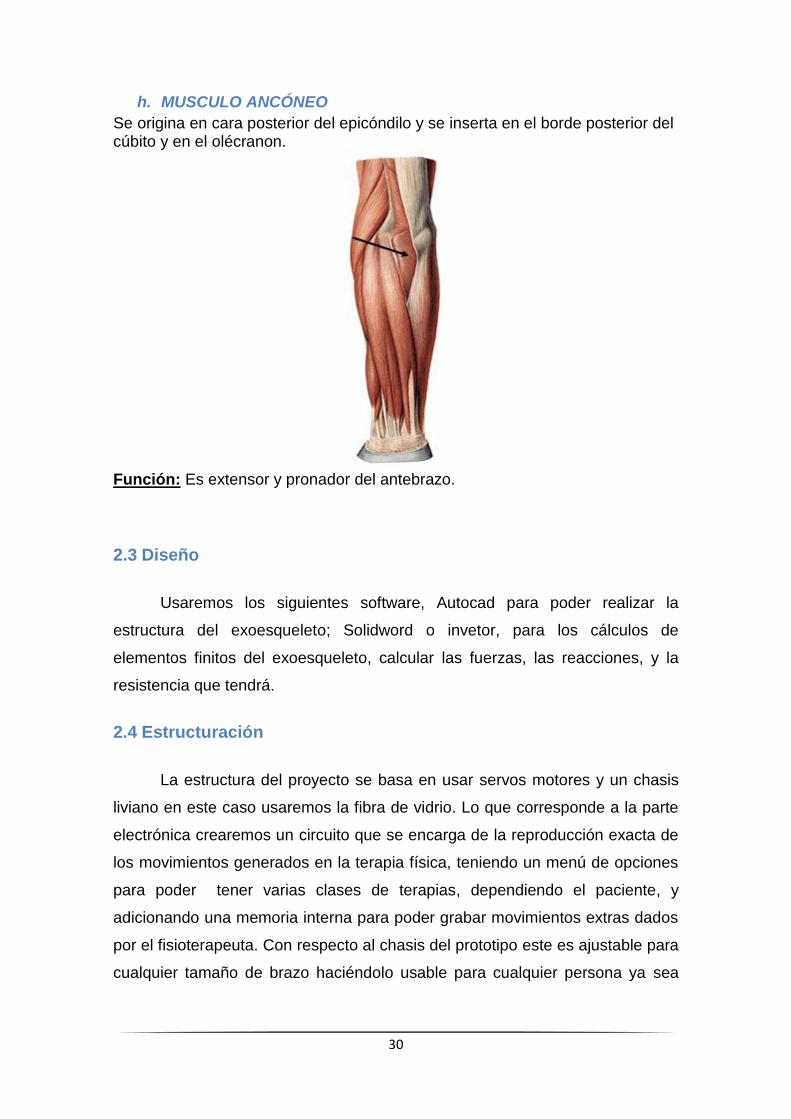
h. MUSCULO ANCÓNEO
Se origina en cara posterior del epicóndilo y se inserta en el borde posterior del cúbito y en el olécranon.
Función: Es extensor y pronador del antebrazo.
2.3 Diseño
Usaremos los siguientes software, Autocad para poder realizar la
estructura del exoesqueleto; Solidword o invetor, para los cálculos de
elementos finitos del exoesqueleto, calcular las fuerzas, las reacciones, y la
resistencia que tendrá.
2.4 Estructuración
La estructura del proyecto se basa en usar servos motores y un chasis
liviano en este caso usaremos la fibra de vidrio. Lo que corresponde a la parte
electrónica crearemos un circuito que se encarga de la reproducción exacta de
los movimientos generados en la terapia física, teniendo un menú de opciones
para poder tener varias clases de terapias, dependiendo el paciente, y
adicionando una memoria interna para poder grabar movimientos extras dados
por el fisioterapeuta. Con respecto al chasis del prototipo este es ajustable para
cualquier tamaño de brazo haciéndolo usable para cualquier persona ya sea
31
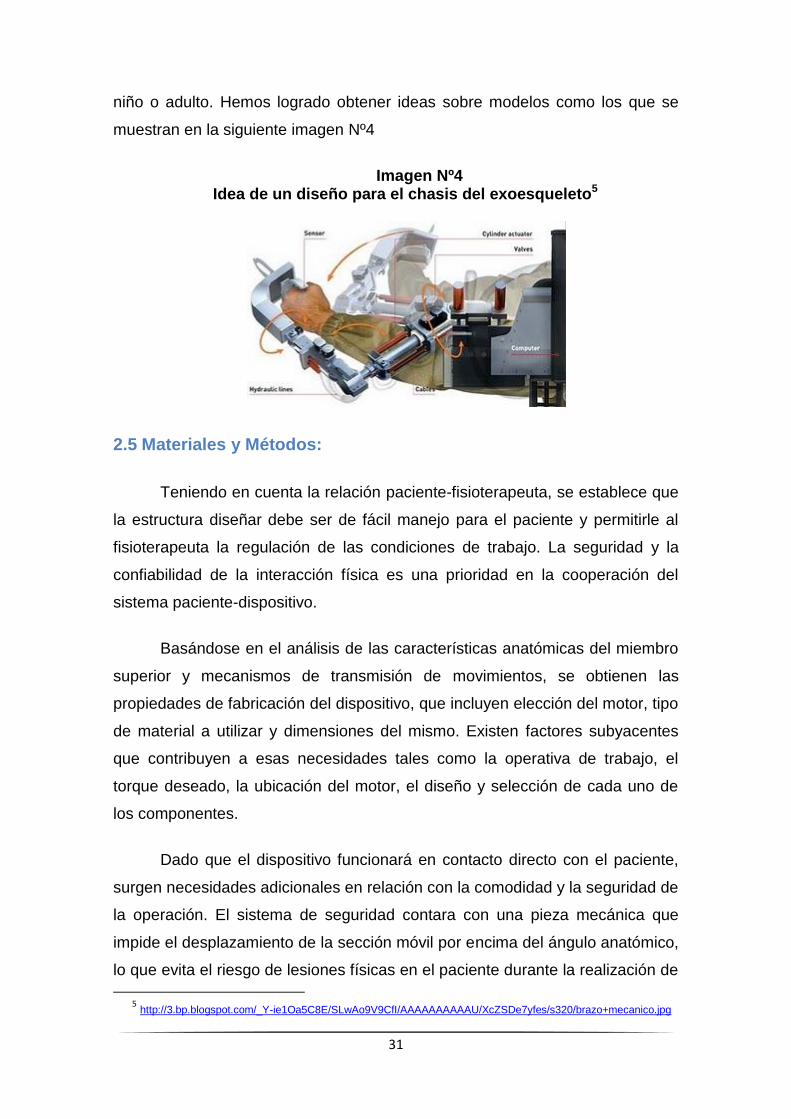
niño o adulto. Hemos logrado obtener ideas sobre modelos como los que se
muestran en la siguiente imagen Nº4
Imagen Nº4 Idea de un diseño para el chasis del exoesqueleto5
2.5 Materiales y Métodos:
Teniendo en cuenta la relación paciente-fisioterapeuta, se establece que
la estructura diseñar debe ser de fácil manejo para el paciente y permitirle al
fisioterapeuta la regulación de las condiciones de trabajo. La seguridad y la
confiabilidad de la interacción física es una prioridad en la cooperación del
sistema paciente-dispositivo.
Basándose en el análisis de las características anatómicas del miembro
superior y mecanismos de transmisión de movimientos, se obtienen las
propiedades de fabricación del dispositivo, que incluyen elección del motor, tipo
de material a utilizar y dimensiones del mismo. Existen factores subyacentes
que contribuyen a esas necesidades tales como la operativa de trabajo, el
torque deseado, la ubicación del motor, el diseño y selección de cada uno de
los componentes.
Dado que el dispositivo funcionará en contacto directo con el paciente,
surgen necesidades adicionales en relación con la comodidad y la seguridad de
la operación. El sistema de seguridad contara con una pieza mecánica que
impide el desplazamiento de la sección móvil por encima del ángulo anatómico,
lo que evita el riesgo de lesiones físicas en el paciente durante la realización de
5 http://3.bp.blogspot.com/_Y-ie1Oa5C8E/SLwAo9V9CfI/AAAAAAAAAAU/XcZSDe7yfes/s320/brazo+mecanico.jpg
32
la terapia. La etapa eléctrica de seguridad consta de dos fines de carrera
ubicados estratégicamente en el dispositivo, los cuales cortan la alimentación
del sistema si se exceden los ángulos máximos de flexión y extensión.
Los módulos componentes del dispositivo deben situarse en una mesa
de trabajo que admita la cómoda ubicación del paciente y el fácil acceso a la
computadora. Esta última disposición, responde a que el control del motor es
realizado a través de la salida estéreo de la placa de audio mediante el
software. Este programa consistirá en la generación de ondas cuadradas de
diferentes períodos y frecuencias, de manera de controlar la velocidad y la
duración del ejercicio. Además se utiliza la entrada de micrófono de la PC para
la lectura del censado de posición de la sección móvil.
El ángulo de flexo-extensión estará determinado por dos sensores
magnéticos, ubicados en las varillas en forma de compás, que permitirán variar
en forma manual y continua las distintas posiciones del ejercicio, de acuerdo a
las especificaciones de trabajo dadas por el fisioterapeuta.
2.6 Desarrollo del Dispositivo
2.5.1 Selección del Motor
Para la selección del motor se tuvieron en cuenta dos variables principales:
1. Velocidad
Se realizaron cálculos empíricos para la selección de las velocidades del
motor, teniendo en cuenta los ángulos y los tiempos transcurridos en
recorrerlos.
2. Torque
Para realizar los cálculos que permitieran una selección adecuada del
torque del motor, se tuvieron en cuenta los momentos de inercia (M), la masa
(m) y las longitudes l de los segmentos del brazo y férula:
33
∑ ∑
Con los parámetros calculados, y teniendo en cuenta las especificaciones
que brinda el fabricante, se da a escoger un motor adecuado para el
exoesqueleto.
2.5.2 Férula y sistema de Transmisión
En este dispositivo se ha diseñado una férula dinámica, que se
encuentra incorporada al exoesqueleto. Esto le permite al paciente tener la
comodidad de ubicar el miembro superior directamente sobre el dispositivo, sin
tener que colocarse la férula previamente.
En el dispositivo desarrollado, se utiliza el sistema de transmisión de tren
de engranajes, con un engranaje ubicado en el eje del motor, y el otro
engranaje, en un eje paralelo y cercano, situado en la articulación formada por
la unión de los brazos mecánicos fijo y móvil.
2.5.3 Electrónica asociada
Los circuitos diseñados se presentan a continuación en diagramas en
bloques, en sus diferentes etapas:
34
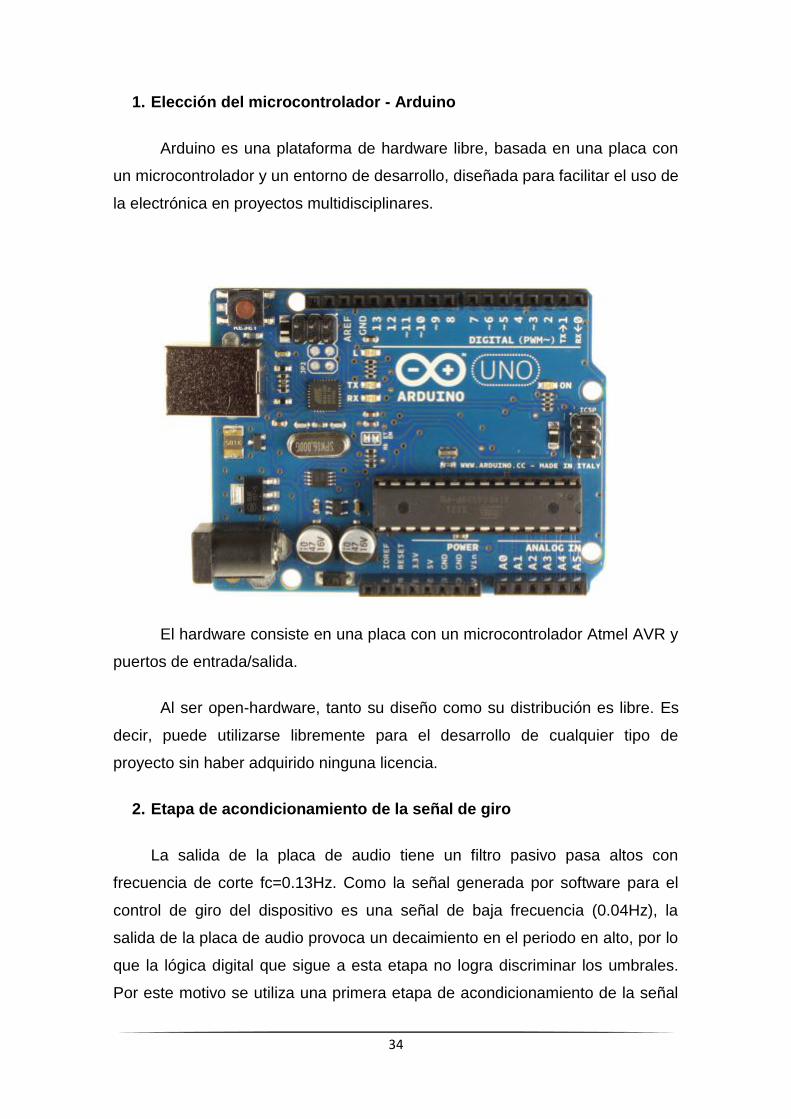
1. Elección del microcontrolador - Arduino
Arduino es una plataforma de hardware libre, basada en una placa con
un microcontrolador y un entorno de desarrollo, diseñada para facilitar el uso de
la electrónica en proyectos multidisciplinares.
El hardware consiste en una placa con un microcontrolador Atmel AVR y
puertos de entrada/salida.
Al ser open-hardware, tanto su diseño como su distribución es libre. Es
decir, puede utilizarse libremente para el desarrollo de cualquier tipo de
proyecto sin haber adquirido ninguna licencia.
2. Etapa de acondicionamiento de la señal de giro
La salida de la placa de audio tiene un filtro pasivo pasa altos con
frecuencia de corte fc=0.13Hz. Como la señal generada por software para el
control de giro del dispositivo es una señal de baja frecuencia (0.04Hz), la
salida de la placa de audio provoca un decaimiento en el periodo en alto, por lo
que la lógica digital que sigue a esta etapa no logra discriminar los umbrales.
Por este motivo se utiliza una primera etapa de acondicionamiento de la señal
35
que consta de un par de amplificadores operacionales configurados como
amplificador no inversor y comparador de cero, conectados en cascada.
3. Etapa de censado
En el dispositivo desarrollado se utilizaron dos sensores magnéticos,
llamados Reed Switch, para poder detectar la posición en la que se encuentra
la extremidad superior cuando realiza el ejercicio de flexo-extensión.
Para el oscilador, la modalidad utilizada, es la del multivibrador astable,
para lo cual el circuito oscila a una frecuencia y ciclo de trabajo configurables
mediante resistencias y condensadores externos.
4. Etapa de control de potencia del motor
De la placa de audio provienen dos señales, una que se utiliza como
entrada de habilitación del driver (de regulación por ancho de pulso, PWM) y la
otra que es la que se suministra en las entradas del driver, para controlar el
sentido de giro del motor. Estas dos señales ingresan respectivamente a un
inversor con transistores para adaptar niveles de voltaje y corriente. El driver
que se utiliza para el control de giro es el L298N. Las tensiones de alimentación
que se utilizaron en los circuitos, son de 24V, ±12 y ±5V.
2.5.4 Control Por software
Las señales de control que ingresan previamente acondicionadas en las
entradas del driver, son ondas cuadradas generadas por software, que se
utilizan para controlar el sentido de giro y la habilitación para el driver.
El control de la velocidad del motor de este diseño se realiza mediante la
regulación por ancho de pulso (PWM) [2]. En este diseño se utilizó el entorno
MatLab® (The Mathworks Company) como entorno de programación, para
generar un tren de onda cuadrada. Mientras mayor sea la cantidad de muestras
en la parte alta del tren, mayor será la velocidad y viceversa. Este tren
generado, además de controlar la velocidad, establece el tiempo de duración
36
del ejercicio de rehabilitación, el cual queda determinado por la cantidad de
muestras totales de la matriz de salida.
Utilizando el mismo entorno de programación se generó otra de control
cuadrada con la misma cantidad de muestras en la parte alta que en la parte
baja, lo que determina que el motor gire en un sentido la misma cantidad de
tiempo que en el otro. Además el tiempo de giro en uno de los sentidos, se
relaciona directamente con el ángulo de flexión, y en el otro sentido, con el
ángulo de extensión del dispositivo.
Dado que el sistema debe funcionar en cualquier computadora personal
se usó la placa de audio como dispositivo de entrada-salida. Las ondas
generadas en el software se comunican con el driver de control a través de la
salida estéreo de la placa de audio de la PC. Por esto, los dos trenes de ondas
generados se disponen en forma de una matriz N x 2, siendo N el número total
de muestras y 2 los canales de la placa de audio por donde las ondas son
exteriorizadas. A su vez, las señales provenientes de los sensores reed switch
se comunican con el software de control a través de la entrada de micrófono
que posee la placa de audio.
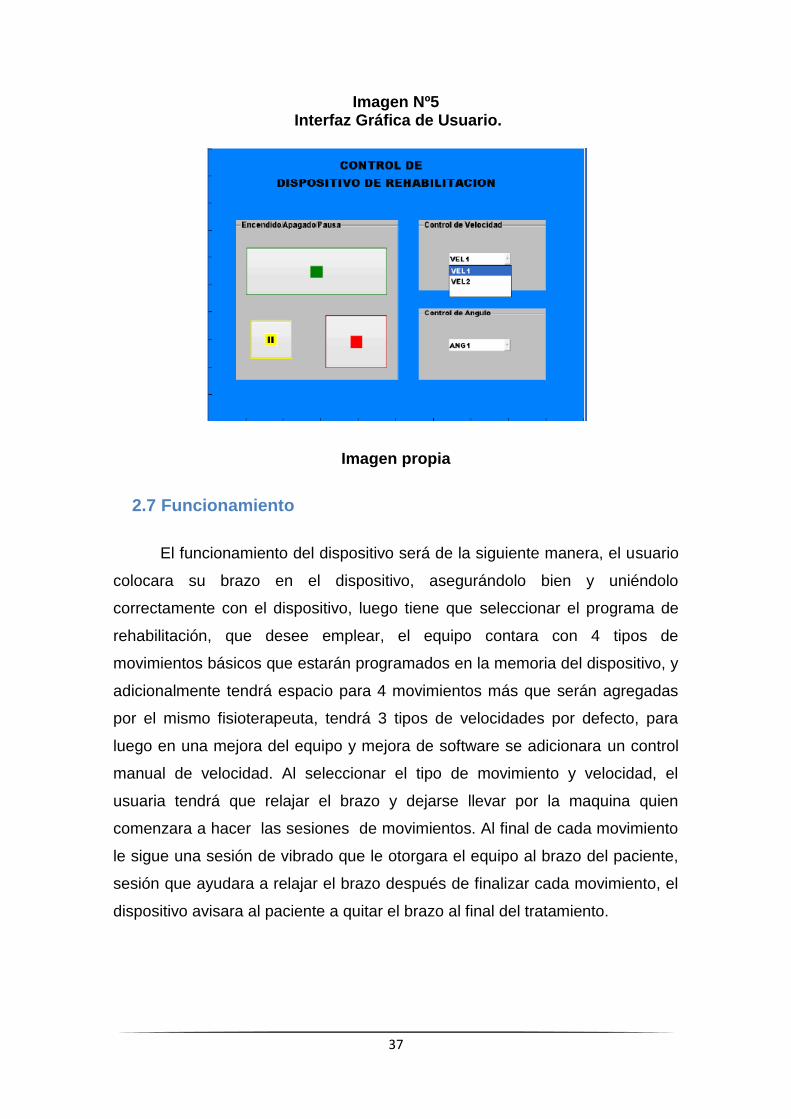
2.5.5 Interfaz Gráfica del Usuario
Se desarrolló una interfaz gráfica de usuario (Graphical User Interface,
GUI) que utiliza un conjunto de imágenes y objetos gráficos para representar la
información y acciones disponibles en el software desarrollado.
Habitualmente las acciones se realizan mediante manipulación directa
para facilitar la interacción del usuario con la computadora. Esa Interfaz, es un
entorno de programación visual disponible en MatLab® para realizar y ejecutar
programas que necesiten ingreso continuo de datos.
En la Figura Nº5 se muestra la Interfaz desarrollada.
37
Imagen Nº5 Interfaz Gráfica de Usuario.
Imagen propia
2.7 Funcionamiento
El funcionamiento del dispositivo será de la siguiente manera, el usuario
colocara su brazo en el dispositivo, asegurándolo bien y uniéndolo
correctamente con el dispositivo, luego tiene que seleccionar el programa de
rehabilitación, que desee emplear, el equipo contara con 4 tipos de
movimientos básicos que estarán programados en la memoria del dispositivo, y
adicionalmente tendrá espacio para 4 movimientos más que serán agregadas
por el mismo fisioterapeuta, tendrá 3 tipos de velocidades por defecto, para
luego en una mejora del equipo y mejora de software se adicionara un control
manual de velocidad. Al seleccionar el tipo de movimiento y velocidad, el
usuaria tendrá que relajar el brazo y dejarse llevar por la maquina quien
comenzara a hacer las sesiones de movimientos. Al final de cada movimiento
le sigue una sesión de vibrado que le otorgara el equipo al brazo del paciente,
sesión que ayudara a relajar el brazo después de finalizar cada movimiento, el
dispositivo avisara al paciente a quitar el brazo al final del tratamiento.

38
2.7.1 Diagrama de Bloques del Funcionamiento
El funcionamiento estar indicado en el siguiente diagrama de bloques:
39
CAPÍTULO III
HIPÓTESIS
En este capítulo trataremos una posible solución al problema sacando las
variables y los indicadores para darnos una idea de la situación del problema y
buscando una solución al mismo
3.1 Hipótesis
Lo que se propone en esta investigación, es desarrollar una propuesta
que integre y articule el campo de la robótica a las áreas de la rehabilitación en
la medicina física. El diseño se presenta intermediando entre ambos.
Existen dispositivos de tratamiento y asistencia en patologías motrices
graves, pero no se han encontrado dispositivos biomecánicos que provean
autonomía en rehabilitación a sus usuarios directos. En el presente, el trabajo
está orientado a formalizar esta propuesta.
El uso de los dispositivos biomecánicos para la rehabilitación de
pacientes con problemas de pérdida del movimiento del miembro superior
mejora el trabajo del fisioterapeuta.
3.2 Variables e Indicadores
3.3.1 Variables
Cuantos discapacitados como máximo, disponen de recursos suficientes
para acceder a este servicio, y cuál es lo mínimo que pueden alcanzar a pagar.
3.3.2 Indicadores
El número de usuarios que necesiten este programa de rehabilitación en
el distrito de surco

40
3.3 Metodología o Método a usar
Observación, hacer un estudio poblacional en el distrito de surco para
saber cuánta población hay con pérdida de movimiento del miembro
superior.
41
Referencias Bibliográficas:
Ama, Antonio J. del. Exoesqueletos. 3 - 6 de mayo de 2010.
http://www.hctlab.com/jornadas_e-accesibilidad/presentaciones/3.pdf (último
acceso: 2011).
Arduino. s.f. http://www.arduino.cc/ (último acceso: novimbre de 2012).
Carlos F. Rodriguez, Hugo Quintero. Movimiento del brazo Humano de los tres planos a las tres
dimensiones. 9 de septiembre de 2005.
http://revistaing.uniandes.edu.co/pdf/rev22art4.pdf (último acceso: 2011).
DELMAS, H. ROUVIÈRE Y A. Anatomia Humana. Lima: MASSON, 2009.
Delvia de Jesús Díaz H, Alexis Refael Veloz. Generalidades del Analisis del Movimiento. 2008.
http://www.monografias.com/trabajos15/kinesiologia-biomecanica/kinesiologia-
biomecanica.shtml (último acceso: 2011).
Julio Cesar Longarzo, Gustavo Mauri, Eduardo J. Carletti. Un paso mas hacia el exoesqueleto.
19 de marzo de 2010. http://www.fba.unlp.edu.ar/news/SCYTEC/PDF/LONGARZO.pdf
(último acceso: 2011).
Manuel Alejandro Chavez Cardona, Felipe Rodriguez Apitia. Exoesqueletos para potenciar las
capacidades humanas y apoyar la rehabilitación. 19 de febrero de 2010.
http://revistabme.eia.edu.co/numeros/7/art/07-Articulo%208.pdf (último acceso:
2011).
Tosi, Rodrigo N. Análisis del movimiento de la Flexión del Antebrazo sobre el brazo desde la
perspectiva anátomo funcional. 2008. http://www.g-se.com/pid/79/ (último acceso:
2011).
Wikipedia. 2010. http://es.wikipedia.org/wiki/Arduino (último acceso: noviembre de 2012).