Embed Size (px)
Citation preview

INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
1Aplicaciones de motores de jaula de ardilla y rotor bobinado
Investigación unidad 3
Victor Emmanuel Canche AnguloAbril 2016.
1

INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
Resumen.
En esta investigación se estudiara dos de los más importantes motores de inducción trifásicos, el de rotor tipo jaula de ardilla y el de rotor bobinado.En los motores de inducción con rotor de jaula de ardilla, el rotor está formadoPor un bloque laminar de núcleo de rotor cilíndrico y ranurado provisto de barrasDe aluminio unidas por delante con anillas para formar una jaula cerrada y Los motores de rotor bobinado tienen el mismo estator que los de jaula de ardilla, pero el rotor lleva un devanado trifásico también, de cobre o aluminio, contado en estrella por uno de los extremos, y los otros van unidos a un anillo cada uno, montados sobre una base aislante, dando lugar a un colector de anillos. Sobre los anillos apoyan las escobillas para sacar estos terminales al exterior y llevarlos a la placa de bornes o placa de conexión. Igualmente se estudiara las características y aplicaciones de ambos equipos, ventajas y desventajas de la utilización de los motores de jaula de ardilla, así mismo como el criterio para la utilización del motor correcto según las necesidades.
2
INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
Tabla de Contenidos
Capítulo 1.............................................................................................................................4motor de rotor de jaula de ardilla.....................................................................................4motor de rotor bobinado..................................................................................................5
Capítulo 2.............................................................................................................................7caracteristicas demotores tipo jaula de ardilla.................................................................7Aplicaciones de los motores de inducción (rotor tipo jaula de ardilla y rotor bobinado)..........................................................................................................................................8
Capítulo 3...........................................................................................................................11Ventajas y desventajas del motor de rotor tipo jaula de ardilla ........................................11Apéndice..............................................................................................................................7Vita......................................................................................................................................8
3
INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
Capítulo 1
motor de rotor jaula de ardilla
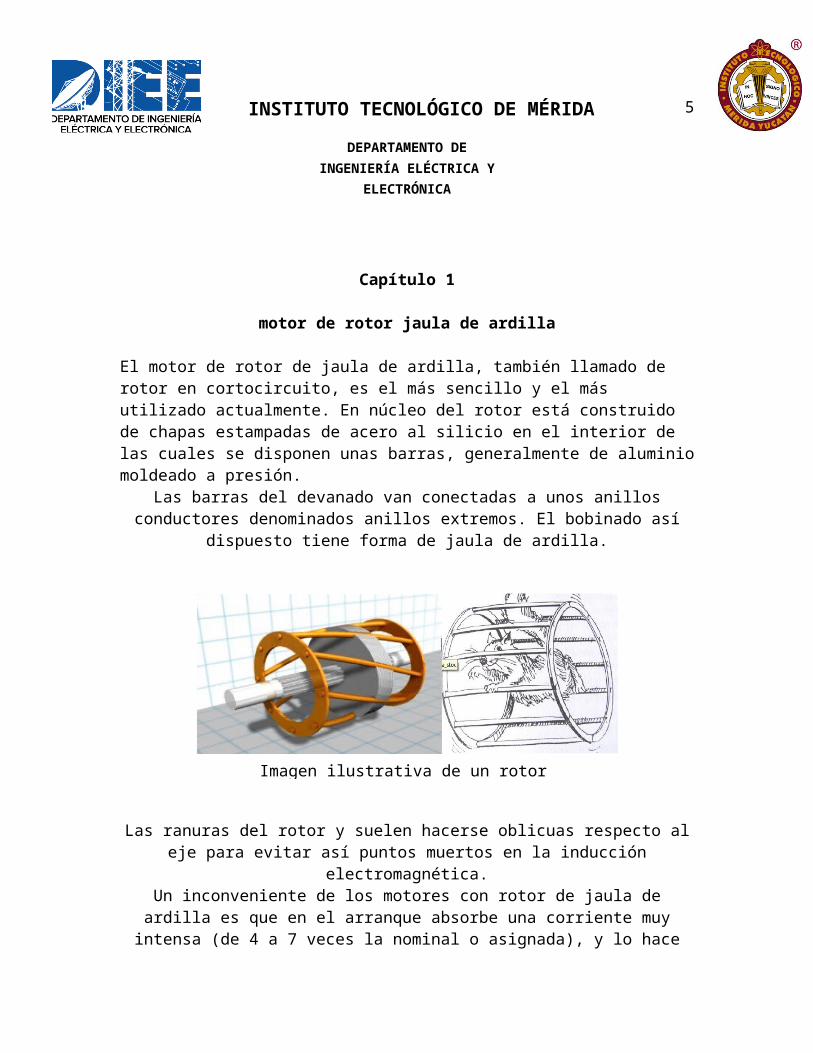
El motor de rotor de jaula de ardilla, también llamado de rotor en cortocircuito, es el más sencillo y el más utilizado actualmente. En núcleo del rotor está construido de chapas estampadas de acero al silicio en el interior de las cuales se disponen unas barras, generalmente de aluminio moldeado a presión. Las barras del devanado van conectadas a unos anillos conductores denominados anillos
extremos. El bobinado así dispuesto tiene forma de jaula de ardilla.
Las ranuras del rotor y suelen hacerse oblicuas respecto al eje para evitar así puntos muertos en la inducción electromagnética.
Un inconveniente de los motores con rotor de jaula de ardilla es que en el arranque absorbe una corriente muy intensa (de 4 a 7 veces la nominal o asignada), y lo hace
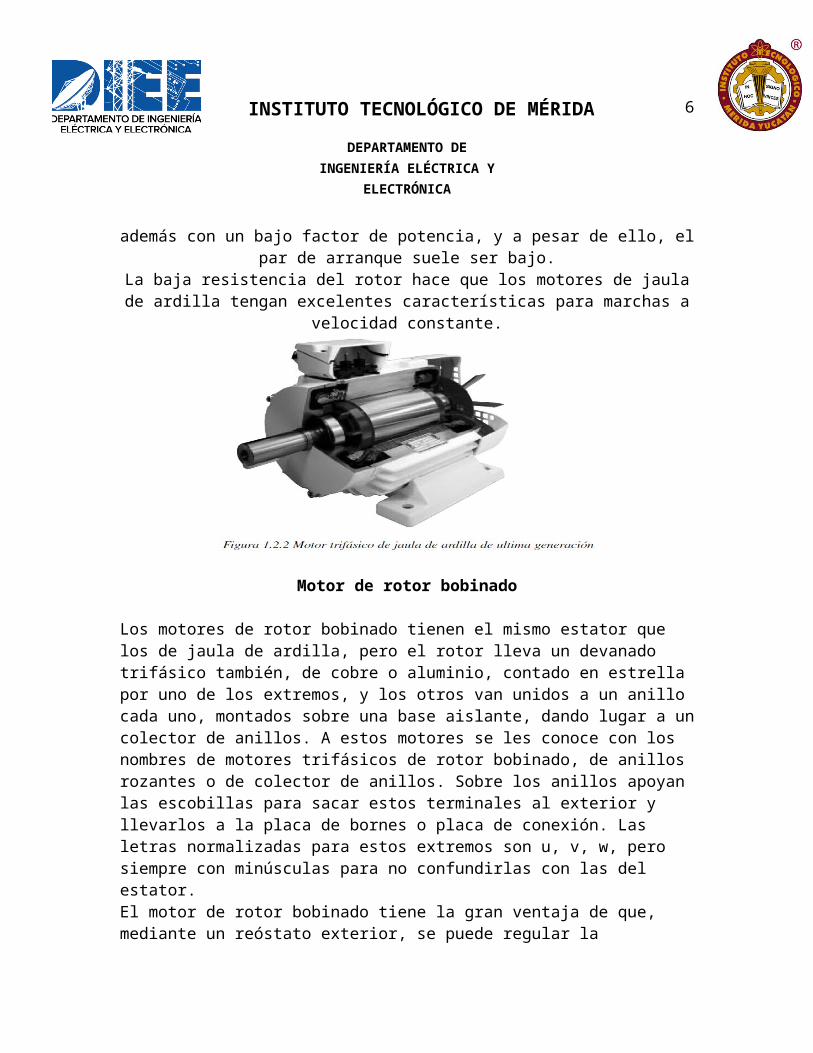
además con un bajo factor de potencia, y a pesar de ello, el par de arranque suele ser bajo. La baja resistencia del rotor hace que los motores de jaula de ardilla tengan excelentes
características para marchas a velocidad constante.
Imagen ilustrativa de un rotor jaula de ardilla
4
INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
Motor de rotor bobinado
Los motores de rotor bobinado tienen el mismo estator que los de jaula de ardilla, pero el rotor lleva un devanado trifásico también, de cobre o aluminio, contado en estrella por uno de los extremos, y los otros van unidos a un anillo cada uno, montados sobre una base aislante, dando lugar a un colector de anillos. A estos motores se les conoce con los nombres de motores trifásicos de rotor bobinado, de anillos rozantes o de colector de anillos. Sobre los anillos apoyan las escobillas para sacar estos terminales al exterior y llevarlos a la placa de bornes o placa de conexión. Las letras normalizadas para estos extremos son u, v, w, pero siempre con minúsculas para no confundirlas con las del estator.El motor de rotor bobinado tiene la gran ventaja de que, mediante un reóstato exterior, se puede regular la resistencia del inducido, y así facilitando un control de la velocidad y corriente de arranque con un elevado par de arranque y un mejor factor de potencia que con el rotor en jaula de ardilla
5
INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
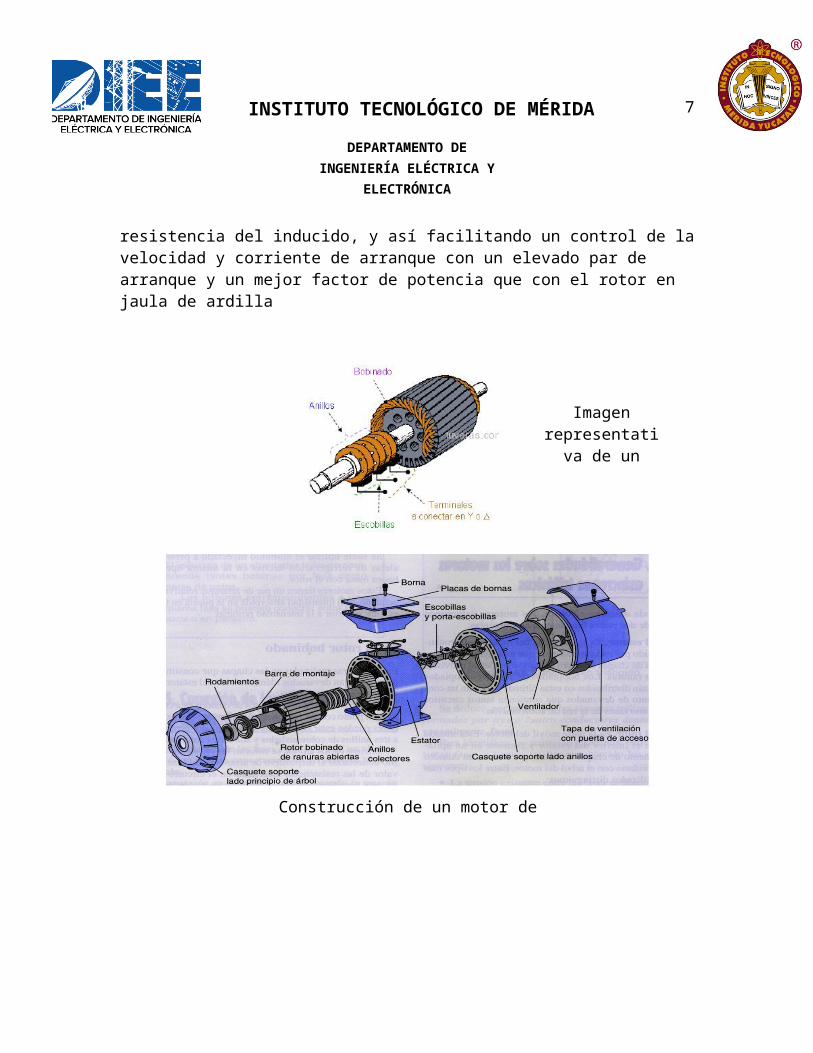
Imagen representativa de un rotor bobinado
Construcción de un motor de rotor bobinado
6
INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
Capítulo 2
Características de motores tipo jaula de ardilla.
Las características de funcionamiento son una presentación gráfica del comportamientoDe:• La velocidad • La corriente• El factor de potencia • La potencia• El rendimiento • El deslizamiento en función de la carga.
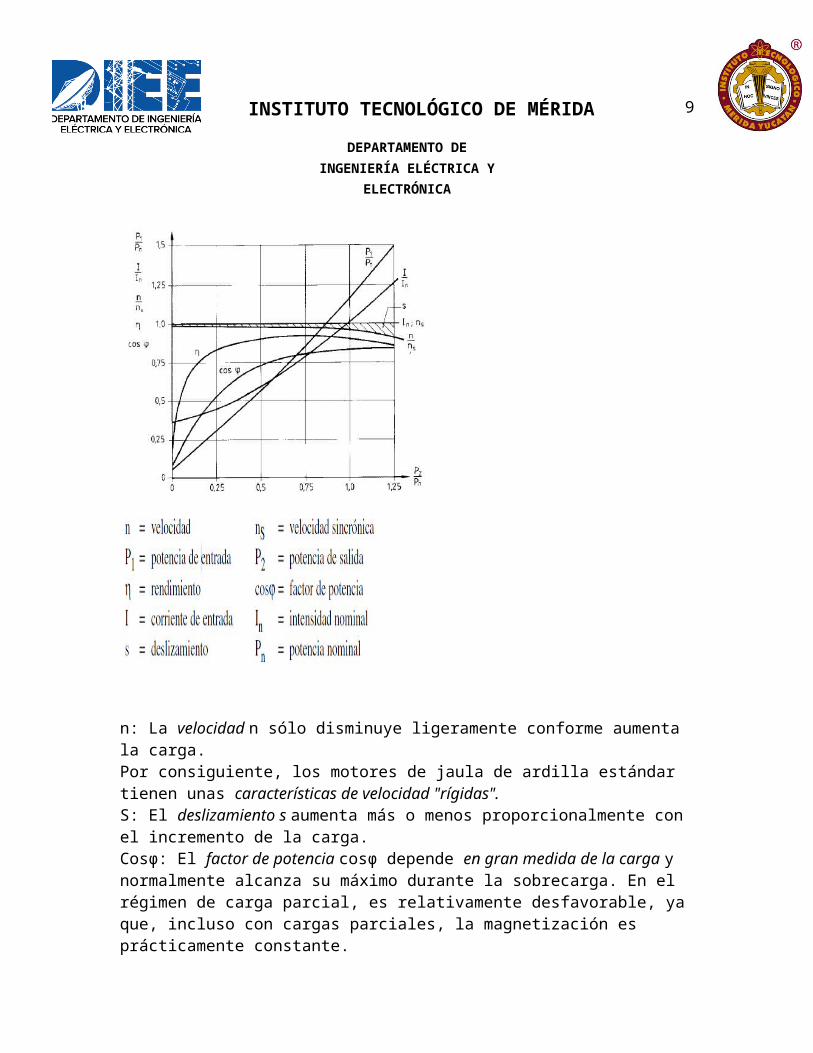
n: La velocidad n sólo disminuye ligeramente conforme aumenta la carga.Por consiguiente, los motores de jaula de ardilla estándar tienen unas características de velocidad "rígidas".S: El deslizamiento s aumenta más o menos proporcionalmente con el incremento de la carga.Cosϕ: El factor de potencia cosϕ depende en gran medida de la carga y normalmente alcanza su máximo durante la sobrecarga. En el régimen de carga parcial, es
Comportamiento de un motor de inducción típico
7
INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
relativamente desfavorable, ya que, incluso con cargas parciales, la magnetización es prácticamente constante.η: El rendimiento η muestra una característica relativamente plana y es prácticamente constante por encima de la media-carga. Suele alcanzar su máximo cuando está por debajo de la potencia de régimen Pn.I: La intensidad I aumenta proporcionalmente comenzando más o menos amedia-carga. Por debajo de la media-carga, la corriente disminuye sólo ligeramente hasta convertirse en la corriente de carga nula IO (magnetización constante).P: La potencia P1 aumenta más o menos en proporción con el inicio de carga comenzando en la potencia de carga nula. En el régimen de sobrecarga, la potencia aumenta algo más deprisa, ya que las pérdidas también se incrementan con más rapidez.
Dado que el rendimiento η y el factor de potencia cosϕ pueden tener un efecto importante sobre la eficacia económica de un motor, es muy importante saber cuáles son los valores de la carga parcial. Ambos valores determinan el rendimiento económico del funcionamiento. En el régimen de carga parcial, los dos valores disminuyen. Además, el factor de potencia cosϕ de los motores de velocidad baja es inferior al de los motores de velocidad elevada. Por consiguiente, los motores de velocidad alta y dimensionamiento preciso no sólo resultan más baratos al comprarlos, sino también al utilizarlos.
Aplicaciones de los motores de inducción (rotor tipo jaula de ardilla y rotor bobinado)
En la ingeniería de aplicación de motores es común, y en muchos casos prácticos, comparar las exigencias de la carga con las características del motor.Los motores de inducción, de jaula de ardilla o de anillos rozantes (rotor bobinado), de baja y media tensión, tienen un campo de aplicación vasto, y especialmente en los sectores de siderúrgica, minería, papel y celulosa, saneamiento, químico y petroquímico, y cemento entre otros.La selección del tipo adecuado de motor, con respecto al tipo, par, factor de potencia, rendimiento y elevación de temperatura, aislación, tensión y grado de protección mecánica, sólo puede ser efectuada luego de un análisis cuidadoso de las necesidades para el empleo del motor,El motor de rotor tipo de jaula de ardilla es el más empleado en cualquier aplicación industrial debido a su construcción robusta y simple, aparte de ser la solución más económica, tanto en términos de motores como de comando y protección en cuanto al motor de rotor bobinado el costo es más elevado que el del motor de jaula de ardilla, la aplicación de los motores de anillos rozantes es necesaria para arranques pesados (inercia
8
INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
alta), movimientos con velocidad ajustable o cuando es necesario limitar la corriente de arranque manteniendo un par de arranque alto.
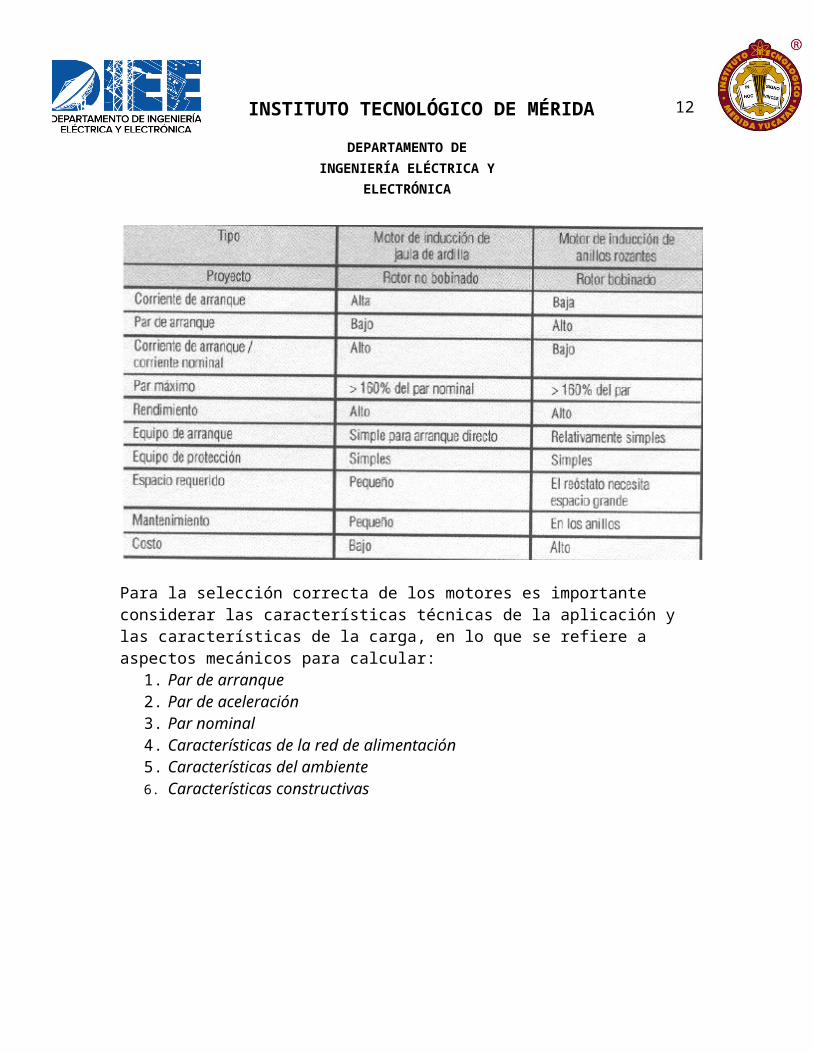
Para la selección correcta de los motores es importante considerar las características técnicas de la aplicación y las características de la carga, en lo que se refiere a aspectos mecánicos para calcular:
1. Par de arranque2. Par de aceleración3. Par nominal4. Características de la red de alimentación5. Características del ambiente6. Características constructivas
Comparación entre los diferentes tipos de motores
9
INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
Guía de selección del tipo de motor para diferentes cargas.
10
INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
Capítulo 3
Ventajas y desventajas del motor de rotor tipo jaula de ardilla.
Ventajas:
1. Al no tener ni escobillas ni colector, los únicos elementos de la máquina
sometidos a fricción y desgaste mecánico son los cojinetes.
11
INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
2. No tiene problemas de estabilidad al someterlo a variaciones bruscas de carga (el
síncrono podía llegar a pararse).
3. Su puesta en marcha es más sencilla que la de las máquinas síncronas, ya que
desde que el rotor empieza a girar hasta que alcanza el régimen permanente,
existe par.
4. La máquina asíncrona de jaula de ardilla tiene una utilización universal como
motor en todos aquellos accionamientos industriales que durante el
funcionamiento tienen una velocidad constante. En este campo no tiene
competencia ya que:
a. Tiene una construcción simple.
b. Es de bajo peso y mínimo volumen.
c. Es barato y robusto.
d. El mantenimiento también es barato.
Desventajas:
1. Su mayor inconveniente es que su velocidad, aunque no rígidamente, como en los síncronos, de hecho si está prácticamente ligada a la velocidad del campo magnético giratorio si se desea que funcionen con buen rendimiento. Por ello, para variar de forma continua su velocidad en un amplio margen y alto rendimiento, hay que modificar la frecuencia de alimentación (igual que en los síncrono), lo que implica la adquisición de equipos electrónicos relativamente caros.
Criterio para la elección de tipos de motores eléctricos
12
INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
GESTIÓN INICIALSiempre que se tiene la necesidad de adquirir un motor, hay que hacer antes los siguientes cuestionamientos:¿Es una instalación nueva o existente?¿Cuáles son las condiciones de la red eléctrica?¿Cuál es la carga que el motor va a accionar?¿Cuáles son las condiciones medioambientales?¿Cuál va a ser el tiempo de recuperación de la inversión?¿Qué tipo de normas debe cumplir el motor?¿Cómo va a ser hecho el arranque del motor?Obviamente¿Cuáles son las características de potencia y velocidad requeridas del motor?
LAS NORMASExisten dos normas bajo las cuales se fabrican los motores. IEC Comisión Electrotécnica Internacional que es acogida por la gran mayoría de países y especialmente los europeos NEMA Asociación Nacional de Fabricantes de Equipos Eléctricos. Es una norma nacional de Estados Unidos, pero es común en muchos países. Hay varias diferencias en la construcción dependiendo de la norma, pero lo más significativo es que mientras que las dimensiones según IEC son en milímetros, según NEMA son en pulgadas. Por esta razón, la intercambiabilidad no es inmediata.
EL LUGAR DE INSTALACIÓN.Por norma, todos los motores están diseñados para operar en un ambiente con temperatura no superior a 40 ºC y en una altura no superior a 1000 metros sobre el nivel del mar. La instalación en cualquier ambiente por encima de estas condiciones hará que el motor deba ser operado a una carga menor de la nominal.Cortamente, esto sucede porque las propiedades refrigerantes disminuyen. La vida útil de un motor está principalmente en su devanado. Si la refrigeración es insuficiente, el devanado se debilita y sufre daños severos.
LA CARGALa carga es la que define la potencia y velocidad del motor. En la gran mayoría de aplicaciones, el motor jaula de ardilla puede atender cualquier carga en su eje, pero es conveniente hacer un estudio detallado de cuál será el momento de inercia, la curva Par-Velocidad de la carga. Estos puntos nos ayudan a definir cómo será el comportamiento dinámico del motor con su máquina de trabajo y cuáles serán los tiempos de arranque.
EL ARRANQUEUno de los momentos más críticos para el motor, la red y la carga es el arranque. Por sus características propias, el motor jaula de ardilla consume durante el arranque una
13

INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
corriente que puede oscilar entre 5 y 8 veces la corriente nominal. El arranque es el periodo en el que el motor hace la transición desde su estado de reposo hasta su velocidad de régimen.
Existen los siguientes tipos de arranque:1. Directo. El motor tendrá una corriente de arranque normal (hasta ocho veces la corriente nominal) y un par de arranque normal.2. Estrella-Triángulo. La corriente y el torque se reducen a la tercera parte (hasta tres veces la corriente nominal).3. Por Autotransformador. El autotransformador es fabricado para entregar al motor una tensión menor de la nominal. Esta tensión puede estar entre el 30% y el 70% dependiendo de la aplicación. La corriente y el torque variarán en proporción cuadrática a la tensión de alimentación.4. Arranque electrónico suave. En este método, el arrancador alimenta el motor con una tensión reducida y gradualmente aumenta la tensión hasta la tensión de régimen. El comportamiento inicial de la corriente y el torque será idéntico al método 3, pero el comportamiento durante todo el periodo de transición dependerá de la manera como el arrancador suave sea controlado.5. Variador de velocidad (o variador de frecuencia). Mediante este método, se logra limitar la corriente de arranque a valores de hasta dos veces la corriente nominal, mientras se obtiene un torque de arranque adecuado para cualquier aplicación.
POTENCIA Y EFICIENCIA DEL MOTOREn cortas palabras, un motor eléctrico es una máquina que transforma potencia eléctrica tomada de la red en potencia energía mecánica en el eje.
La potencia eléctrica obedece a la siguiente relaciónP = √3 * V * I * Cos φ Donde: P: Potencia en kWV: Voltaje o tensión en voltiosI: corriente en amperiosCos φ: Factor de potencia)La potencia mecánica obedece a la siguiente relaciónP = T * n / 9550Donde:P: Potencia en kWT: torque en Nm El torque es la capacidad del motor de hacer girar cargas.n: velocidad en rpm
14
INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
Toda máquina consume más potencia de la que entrega, por lo que es importante que consideremos el término de eficiencia. La potencia que el motor consume y no convierte en potencia de salida son pérdidas. La eficiencia o rendimiento es una medida de qué tanto desperdicia una máquina.La eficiencia se calcula según la siguiente relaciónη = Ps / PeDonde:Ps es la potencia de salida, en este caso potencia en el ejePe es la potencia de entrada, en este caso potencia eléctricaDe esta forma, entre mayor eficiencia, menor desperdicio y consecuentemente menores costos de operación. Contrariamente, entre menor eficiencia, mayor desperdicio y mayores costos.
15

INSTITUTO TECNOLÓGICO DE MÉRIDA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
Lista de referencias
http://literature.rockwellautomation.com/idc/groups/literature/documents/wp/icg-wp000_-es-p.pdfhttp://platea.pntic.mec.es/~jgarrigo/SAP/archivos/1eva/introduccion_motores_ca.pdfhttp://catarina.udlap.mx/u_dl_a/tales/documentos/lep/salvatori_a_m/capitulo1.pdfhttp://proton.ucting.udg.mx/~cruval/PROYECTO4-PUERTA.docxhttp://ecatalog.weg.net/files/wegnet/WEG-seleccion-y-aplicacion-de-motores-electricos-articulo-tecnico-espanol.pdfhttp://insmaquinaselectricas.blogspot.mx/2010/03/motores-asincronos-de-rotor-bobinado.htmlhttp://perso.wanadoo.es/danieldiaz_borr/rotor%20bobinado.htmhttp://www.ingelec.uns.edu.ar/eg2620/material/u07.pdfhttp://repositorio.uchile.cl/tesis/uchile/2011/cf-sandoval_rm/pdfAmont/cf-sandoval_rm.pdfhttp://www.iesbernatguinovart.com/04v_tecnologia/carpeta_arxius/maquinas%20electricas.doc
16




























