Embed Size (px)
Citation preview

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
1
1.- Generalidades.- El principio de funcionamiento del Motor Paso a Paso es en verdad tan antiguo como la teoría electromagnética elaborada por J. Maxwell a mediados del siglo XIX. El primer dispositivo de uso práctico, basado en el efecto autocentrante de piezas polares dentadas fue desarrollado en el año 1930 por la Armada Británica. Se utilizaba como posicionador remoto, transmitiendo la rotación de un eje comandado por un sistema mecánico. Durante la Segunda Guerra Mundial, la marina de los Estados Unidos aplicó este dispositivo a diversos componentes navales, tales como un girocompás repetidor. Los motores paso a paso eran comandados por relays o dispositivos de conmutación mecánicos con escobillas que lógicamente eran lentos, voluminosos y poco confiables, debido al desgaste. A mediados de la década del 40, la aparición de los servomotores operando a lazo cerrado, conocidos como Selsing y Sincron desplazaron rápidamente a los motores paso a paso por las razones anteriormente expuestas. Los servomotores mencionados se adaptaron rápidamente a las necesidades de los dispositivos de control de esa época que operaban en forma analógica. La evolución de las técnicas digitales experimentada en las tres últimas décadas obligó a la resurrección del motor paso a paso, ya que el uso de dispositivos analógicos comandados por computadoras requiere de interfases de conversión digital-analógica. 2.- Definición.- El motor paso a paso es un actuador o transductor electromagnético incremental que convierte pulsos eléctricos en desplazamientos angulares de un eje. Este motor es en sí mismo un conversor digital-analógico ya que convierte una señal eléctrica digital en un desplazamiento angular del rotor. Las características anteriormente mencionadas hacen que el movimiento sea preciso, constante y repetible; dándole al motor paso a paso una elevada capacidad de posicionamiento, lo que permite utilizarlos en sistemas que requieren un control exacto de velocidad, distancia y dirección de un movimiento. Lo más importante del motor paso a paso es que el único error sistemático que produce es el error de paso que generalmente es menor que el 5% del valor del paso. Este error no es acumulativo, o sea que es independiente del desplazamiento total girado y del número de veces que se repita la posición final. El motor paso a paso es generalmente controlado por una fuente de potencia de corriente continua y un circuito lógico (driver) y que constituyen un elemento clave en l a performance mismo. 3.- Tipos de motor paso a paso.- Existen tres grandes grupos de motores paso a paso, según su principio de funcionamiento que son:
1) Motores de reluctancia variable. 2) Motores de imán permanente. 3) Motores mixtos. Cada uno de estos grupos requiere de un análisis detallado.
4.- Motores de reluctancia variable.- Las máquinas de reluctancia variable son tal vez las más sencillas entre las máquinas eléctricas, y no son exclusivamente motores paso a paso, sino que también pueden ser usadas como máquinas analógicas.

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
2
Constan de un estator con devanados de excitación, y un rotor magnético con salientes. No se necesitan conductores en el rotor porque el par se produce por la tendencia del rotor a alinearse con la onda de flujo producida por el estator de acuerdo con la posición de menor reluctancia. Esto es una característica importante porque significa que en estas máquinas todas las pérdidas resistivas del devanado se presentan en el estator. Como en general el estator tiene mejor disipación de calor que el rotor, el resultado suele ser un motor más pequeño para similar prestación. Las máquinas de reluctancia variable se pueden clasificar en dos tipos: de saliente simple y de saliente doble.
Eje magnéticode la fase 2
Eje magnéticode la fase 1
Eje magnéticode la fase 2
Eje magnéticode la fase 1Rotor
- 1 - 1- 2 2
1 1- 2 2
Estator
2 - 2
1
- 1
Rotor
Estator
fig. 1-a fig.1-b La figura 1-a muestra un corte de una máquina de reluctancia variable de saliente simple. Se observa un devanado bifásico de estator, aunque puede tener cualquier número de fases. La inductancia de cada devanado de fase de estator varía con la posición del rotor de tal modo que la inductancia es máxima cuando el eje del rotor esta alineado con el eje magnético de esa fase, y es mínima cuando los dos ejes son perpendiculares. La fig. 1-b muestra el corte transversal de una máquina de reluctancia variable de dos fases de saliente doble. El estator saliente tiene cuatro polos, cada uno con un devanado. Los devanados de los polos opuestos son de la misma fase. Así, esta máquina es también bifásica. De igual modo, la inductancia de fase de esta configuración varía desde un valor máximo, cuando el eje del rotor está alineado con el de esa fase, hasta un mínimo, cuando son perpendiculares. De hecho, la única diferencia básica entre las dos configuraciones es que la saliente del estator aumenta la diferencia entre las inductancias máxima y mínima, lo cual a su vez aumenta las características de producción de par de la máquina. Las máquinas de saliente doble son el tipo predominante de máquinas de reluctancia variable. Cuando se excita con corriente continua una de las bobinas de fase, el rotor se alineará con la misma en la posición de mínima reluctancia. Para apartar el rotor de esa posición se requiere de una cierta cupla que se llama cupla de retención. Ésta es proporcional al cuadrado de las corriente de fase, y por consiguiente depende tan sólo de la magnitud de las corrientes de fase y no de su dirección. La geometría de las máquinas simétricas como las mostradas en la figura 1 presentan algún tipo de incertidumbre en cuanto al posicionamiento del rotor. Analizaremos a continuación un motor de reluctancia variable de 4 fases en el estator y 5 dientes en el rotor (figura 2).

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
3
A
BD
C
1
25
4 3Rotor
Estator fig. 2 Para lograr que este motor gire en sentido horario partiendo de la posición indicada se debe seguir la siguiente secuencia de excitación. Paso 1: Energizar la bobina B; el diente 2 se alinea con el polo B. Paso 2: Desenergizar B Energizar C; el diente 3 se alinea con el polo C. Paso 3: Desenergizar C Energizar D; el diente 4 se alinea con el polo D Paso 4: Desenergizar D Energizar A; el diente 5 se alinea con el polo A En cuatro pasos el rotor ha girado 72º o sea que se trata de un motor de reluctancia variable de un paso de 18º El principal inconveniente del motor de reluctancia variable radica en que en condiciones de reposo (sin excitación) el rotor queda en libertad de girar. 5.- Motores paso a paso de imán permanente.- En los motores paso a paso de imán permanente el rotor es un imán permanente. Funciona con el principio básico del magnetismo: polos de igual signo se repelen y polos de signo opuesto se atraen. Si el estator tiene una sola fase constituida por uno o dos bobinados (figura 3-a) al invertir la corriente en el bobinado se invertirá polaridad efectuando el rotor un giro de 180º pero no se puede predeterminar el sentido de giro. Si en cambio el estator se hace de 2 fases (figura 3-b) ya se elimina esa incertidumbre. Excitando las fases del estator de forma tal que las caras A y B sean polos sur y las D y C sean polos norte, el lado norte del rotor se ubicará entre las caras A y B. Si se invierte la corriente en los bobinados A y C el lado norte del rotor se ubicará entre las caras B y C efectuando un giro de 90 grados. En cada cambio de sentido de la corriente en fases sucesivas el rotor girará un paso de 90 º . Para cambiar el sentido de giro hay que cambiar la secuencia. En los rotores de imanes permanentes se suele mecanizar un número de dientes limitado por su estructura física. El hecho de ser dentado hace que su posicionamiento no varíe aún desapareciendo la excitación. Esto le permite una mayor precisión.

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
4
Eje magnéticode la fase 2
Eje magnéticode la fase 1Rotor
- 1 - 1- 2 2
1 1- 2 2
Estator
Rotor
Estator
N
S
N
S
A
BD
C
fig. 3-a fig. 3-b 6.- Motores paso a paso Hibridos.- Los motores paso a paso híbridos son combinación de los dos tipos anteriores; el rotor suele estar constituido por anillos de acero dulce dentado en un número ligeramente distinto al del estator y dichos anillos montados sobre un imán permanente dispuesto axialmente. En la figura 4 se muestra un motor paso a paso híbrido en donde el rotor es un imán permanente axial con dos anillos de acero de 5 dientes y el estator es de 4 dientes y dos fases. En este caso las bobinas del estator de lados opuestos se excitan simultáneamente de forma tal que cuando a un diente le corresponde el polo norte al diente opuesto le corresponde el polo sur.
Imán permanente
Estator
Camino de flujo delimán permanente
Rueda polarnorte
Rueda polarsur
NS
A
C
BDS2
S3S4
S5
S1 N2
N2
N2
N2
N2
fig. 4 Para lograr que este motor gire en sentido horario partiendo de la posición indicada se debe seguir la siguiente secuencia de excitación. Paso 1: Energizar las bobinas B y D con el sentido de corriente indicado en la fig.4 ; el diente S2 se alinea con el diente B(norte).

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
5
Paso 2: Desenergizar B y D Energizar las bobinas A y C con el sentido de corriente inverso al indicado en la fig. 4 ; el diente S3 se alinea con el diente C(norte). Paso 3: Desenergizar A y C Energizar las bobinas B y D con el sentido de corriente inverso al indicado en la fig.4; el diente S4 se alinea con el diente D(norte). Paso 4: Desenergizar B y D Energizar las bobinas A y C con el sentido de corriente inverso al indicado en la fig. 4; el diente S5 se alinea con el diente A(norte). En cuatro pasos el rotor ha girado 72º o sea que se trata de un motor híbrido de un paso de 18º. La diferencia con el similar de reluctancia variable es que la cupla es mayor porque la atracción magnética es ejercida en dos caras y el vínculo magnético es mucho mas fuerte. 7.- Características de los motores paso a paso.- Desde el punto de vista mecánico, es importante conocer algunas de las principales características que se definen sobre un motor paso a paso. • Par dinámico o de trabajo (Working Torque): depende de sus característica
dinámicas y es el momento máximo que el motor es capaz de desarrollar sin "perder" paso, es decir, sin dejar de responder a algún impulso de excitación del estator y dependiendo, evidentemente, de la carga. Generalmente se ofrecen, por parte del fabricante, curvas denominadas de arranque sin error (pull-in) y que relaciona el par en función del número de pasos por segundo.
• Par de mantenimiento (Holding Torque): es el par requerido para desviar, en régimen de excitación, un paso el rotor cuando la posición anterior es estable; es mayor que el par dinámico y actúa como freno para mantener el rotor en una posición estable dada.
• Par de detención (Detent Torque): es un par de freno que, siendo propio de los motores de imán permanente, es debido a la acción del rotor cuando los devanados estatóricos están desactivados.
Según lo anterior, las características principales que definen a un motor paso a paso son: • Angulo de paso (Step angle): avance angular producido bajo un impulso de
excitación. Se expresa en grados. • Número de pasos por vuelta: es la cantidad de pasos que ha de efectuar el rotor para
realizar una revolución completa; evidentemente
ANP
º360= A
donde NP es el número de pasos y A el ángulo de paso. • Error de paso: indica el error total introducido por el motor en el movimiento de un
paso simple. Se expresa en porciento, y en construcciones normales es inferior al 5%
• Frecuencia de paso máxima: es el máximo número de pasos por segundo que el rotor puede efectuar obedeciendo a los impulsos de control.

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
6
• Momento de inercia del rotor: es su momento de inercia asociado que se expresa en gramos por centímetro cuadrado (g.cm2).
• Par de mantenimiento, de detención y dinámico: definidos anteriormente y expresados en miliNewton * metro (mN * m).
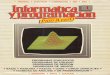
8.- Característica cupla – velocidad.– Además de las características mencionadas anteriormente, en la elección de un motor paso a paso deben considerarse otros parámetros como por ejemplo la relación cupla - velocidad (pasos por segundo). La cupla dinámica de un motor paso a paso va disminuyendo con la velocidad porque cuando la alimentación se realiza a tensión constante (como lo son todas las aplicaciones prácticas) la velocidad de crecimiento de la corriente a través de los devanados depende do la constante de tiempo L/R, y a medida que aumenta la frecuencia de los pulsos aplicados al motor, la corriente efectiva que circula por los devanados es menor y en consecuencia menor es la cupla. Además en el caso del motor de imanes permanentes se genera una f.c.e.m. que tiende a impedir la circulación de la corriente por los devanados. La característica cupla – velocidad de un motor paso a paso no tiene la misma interpretación que la curva cupla – velocidad de un motor convencional. En el motor paso a paso esta curva característica no define puntos de operación ni son representativos de una función o relación sino que indica los límites de zonas de trabajo. Estas curvas simplemente definen la región de combinaciones cupla -velocidad dentro de la cual el motor operara satisfactoriamente, para un conjunto dado de condiciones de excitación y control.
Región de arranque -parada sin error
Región de alta-velocidad
CUPL
A
VELOCIDAD (p.p.s.)
Curva de la cupla de salidade sincronismo (Pull-out torque)
Curva de la cupla de entradaen sincronismo (Pull-lin torque)
fig. 5 En la figura 5 se muestran las dos regiones de funcionamiento de un motor paso a paso, que están delimitadas por las curvas de: - Cupla de entrada en sincronismo (pull-in torque) - Cupla de salida de sincronismo (pull-out torque) Se define como cupla de salida de sincronismo a la cupla máxima que aplicada a un motor paso a paso que está girando a una velocidad dada, le permite seguir girando sin perder sincronismo. -

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
7
Se define como cupla de entrada en sincronismo a la cupla máxima que a un régimen de pasos por segundo dado, le permite al motor paso a paso arrancar y permanecer en sincronismo. Entre el eje de las velocidades y la curva de cupla de entrada en sincronismo tenemos la denominada “región de arranque - parada sin error”, o zona de funcionamiento por pasos. Dentro de esta zona el motor será capaz de arrancar desde reposo a una velocidad dada sin perder pasos y permanecer en sincronismo arrastrando cualquier valor de la cupla que esté por debajo de la curva límite. Entre ambas curvas límite tenemos la denominada “región de alta velocidad” . Para alcanzar esta zona de funcionamiento el motor debe ser acelerado a partir de un punto cualquiera de la región de arranque – parada sin error. Dentro de esta zona el motor puede permanecer en sincronismo siempre que no se sobrepase la curva limite de salida de sincronismo, pero no puede arrancar ni detenerse sin perder pasos. Para la obtención de estas curvas deben utilizarse equipos de frenado (dinamómetros) con muy bajo rozamiento interno, y con rotores cuya inercia no sea más de dos veces la inercia propia del motor, de lo contrario los resultados se verán distorsionados. 9.- Resonancia.- Dado el carácter netamente oscilatorio del movimiento del rotor, el motor paso a paso posee frecuencias naturales de oscilación cuyo valor dependerá de: • La inductancia de los devanados • E1 momento de inercia del rotor • El rozamiento de los cojinetes • El amortiguamiento propio. Cuando los devanados se excitan con una frecuencia tal que el sistema “campo magnético–rotor” entre en resonancia, el rotor pierde sincronismo con los pulsos de alimentación y en consecuencia la cupla entregada por el motor se reduce a cero (fig.6).-
CUPL
A
VELOCIDAD (p.p.s.)
Zonas de resonancia
fig. 6 Para salvar este inconveniente se han desarrollado diversos sistemas de amortiguamiento que podemos clasificar en: - Viscosos - De fricción - De corrientes parásitas.

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
8
En todos los casos se trata de elementos agregados al motor que además de incrementar su costo, reducen la performance. Por esto es conveniente salvar el problema de resonancia eligiendo el motor más adecuado a cada aplicación, de modo que las propias características de amortiguamiento del sistema accionado (fricción, inercia) sean utilizadas para superar los 'pozos' de la curva de cupla. 10.- Circuitos de excitación.- Lógicamente el motor paso a paso posee los bobinados en el estator y normalmente estos son 4, ya se trate de un motor de 2 fases a uno de 4 fases. En el primero de los casos (imán permanente) los bobinados son dos en oposición para cada fase. Para cada tipo de motor paso a paso (reluctancia variable, imán permanente y mixto) existen diversos tipos de circuitos de excitación. Se describirán a continuación algunos circuitos de excitación elementales para los distintos tipos de motores paso a paso. 10.1.- Circuitos de excitación para motores de reluctancia variable. La figura 7-a muestra la disposición esquemática de los bobinados en un motor de reluctancia variable con cuatro fases y la figura 7-b muestra el circuito equivalente para el motor de 7-a.
I1 I2 I3 I4
+VRS
I1 I2 I3 I4
+V RS
fig. 7-a fig. 7-b La figura 8 muestra la secuencia de pulsos para excitación de “bobina simple” que produce el giro del rotor en sentido antihorario. Luego de aplicar los 4 pulsos (uno en cada bobina) el rotor habrá girado un ángulo total de 72°. Cuando la frecuencia de los pulsos aumenta de modo que el ancho del pulso “tP” se hace igual que la “constante de tiempo” del circuito, la corriente alcanza su valor máximo al final del pulso. Este valor de corriente es el que condiciona el valor de la cupla de salida de sincronismo: para la correspondiente frecuencia.(figura 8)

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
9
Fase 1
Fase 2
Fase 3
Fase 4
t
t
t
t
0
0
0
0
tP V
I
V
fig. 8 Una forma de aumentar la cupla para una frecuencia dada, es realizar la excitación de "bobina doble”, cuya secuencia se muestra en la figura 9. En este modo de excitación, el ancho del pulso es el doble que en la excitación de ''bobina simple” y el valor alcanzado por la corriente al final del pulso es un 36 % mayor. Como en los motores de reluctancia variable la cupla es proporcional al cuadrado de la corriente (operando en la región lineal) el incremento de cupla al hacerlo funcionar con excitación de “bobina doble”, es de un 87% con respecto al modo de excitación de “bobina simple”.
Fase 1
Fase 2
Fase 3
Fase 4
t
t
t
t
0
0
0
0
V
I
V
fig. 9 Otra forma de aumentar 1a corriente (y en consecuencia la cupla) consiste en disminuir el valor de la “constante de tiempo” del circuito, para lo cual normalmente se intercala una resistencia externa Rs de alto valor, en este caso se debe aumentar correspondientemente el valor de la tensión aplicada al circuito. 10.2.- Circuito de excitación para motores imán permanente.- La figura 10 muestra la disposición esquemática de un motor de imán permanente con bobinado bifilar, este sistema es uno de los más utilizado para estos motores.

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
10
I2I3I4
+VRS
I1
1
3
2
4
C C
fig. 10 Se observa en dicha figura que sobre cada polo del estator hay arrolladas dos bobinas, en sentidos opuestos. De esta forma puede utilizarse una fuente de alimentación simple, pues para el cambio de polaridad magnética no es necesario invertir el sentido de la corriente . Si bien esto representa una ventaja desde el punto de vista del circuito de comando es en cambio una desventaja desde el punto de vista del aprovechamiento de materiales en el motor. Obsérvese que para un polo cualquiera, solo se utiliza la mitad de la f.m.m. disponible, lo que se traduce en una menor cupla. Esta baja eficiencia se compensa en parte mediante el uso de alambres de menor diámetro para los arrollamientos polares lo que permite colocar mas espiras e incrementar así la f.m.m. (debe tenerse presente que la reducción del diámetro de los conductores está limitada por el calentamiento de las bobinas). Reducir el diámetro de los conductores implica aumentar la resistencia reduciendo de este modo la “constante de tiempo” L/R, con lo que se obtiene una mayor cupla, si bien es necesaria una mayor tensión de alimentación. La figura 11 representa el circuito equivalente del bobinado de la figura 10. Se colocan los capacitores C para proteger los interruptores I1, I2, I3 e I4 (normalmente transistores en los circuitos reales), absorbiendo las tensiones de autoinducción producidas por la interrupción de la corriente en los bobinados del motor.
I1 I3 I2 I4
+V RS
fig. 11

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
11
La resistencia exterior RS tiene por finalidad reducir la “constante de tiempo” del circuito para lograr una mayor cupla. En la posición indicada en figura 10 están cerrados los interruptores I1 e I4. Para conseguir que el rotor avance un paso se abre I1 y se cierra I3. El .segundo paso lo hace al abrir I4 y cerrar I2, el tercero al abrir I3 y cerrar I1, y el último paso de la secuencia al abrir I2 y cerrar I4. De esta forma el rotor ha girado cuatro pasos y se ha completado la secuencia de pasos (figura 12).
Fase 1
Fase 2
Fase 3
Fase 4
t
t
t
t
0
0
0
0
fig. 12 10.3.- Funcionamiento en corriente alterna.- Una posibilidad interesante que ofrecen los motores paso a paso de imán permanente, es su capacidad de funcionar como motores sincrónicos de baja velocidad, en una red de corriente alterna monofásica. La velocidad sincrónica en este caso está dada por:
RNf
n⋅
=60
f = frecuencia de la red
NR = número de dientes del rotor Así para un motor con NR = 50 (paso 1,8°) la velocidad sincrónica (en red de 50 Hz) será:
rpmn 6050
5060=
⋅=
Las figuras 13-a y b muestran el esquema de circuito de un motor paso a paso conectado como motor sincrónico a una red de c.a., y e1 correspondiente circuito equivalente . En la práctica resulta ser RB << ωL , en consecuencia, para lograr un desfasase de 90º entre las corrientes de las dos fases (que produce la mayor cupla), debe cumplirse, que:
LR ϖ= L
C⋅
= 2
1ϖ

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
12
Vca
RRC
VcaI1
I2I2 I1
C
RB RB
L L
fig. 13-a fig. 13-b 10.4.- Funcionamiento en lazo abierto y en lazo cerrado. Cuando las exigencias del sistema accionado lo permiten, (aplicaciones no críticas y con cargas relativamente estables) se utilizan los motores paso a paso en control de lazo abierto; en la figura 14 se indica el esquema del circuito para un motor conectado de esta manera .
MotorEtapa depotencia(drivers)
Etap
a de
lógi
ca
Osciladory control
1
2
3
4
+ Vcc
fig. 14 Por el contrario, cuando el sistema accionado presenta inercias importantes, o cargas muy variables, se aplica el control en ''lazo cerrado”. En la figura 15 se indica el esquema de circuito. En este caso se requiere un transductor de desplazamiento, óptico o magnético, acoplado al eje del motor; este transductor debe generar un pulso por cada paso que avanza el motor . La señal que genera el transductor es amplificada y luego se realimenta al circuito de control del motor.

Area Electrotecnia y Máquinas Eléctricas Máquinas e Instalaciones Eléctricas Ing. Osvaldo Luis Mosconi
13
MotorEtapa depotencia(drivers)
Etap
a de
lógi
ca
Osciladory control
1
2
3
4
+ Vcc
Rueda dentada
Señal deentrada
Sensormagnéticou óptico
fig. 15 11.- Aplicación de motores paso a paso.- Cada aplicación de un motor paso a paso requiere un cuidadoso estudio. Deben tenerse en cuenta las indicaciones siguientes: • No se puede lograr una precisión de posicionado mayor que la declarada para el
motor funcionando en vacío (normalmente ésta es un 6% del paso). • Al seleccionar la cupla de retención hay que tener en cuenta que cuando el sistema
accionado presenta una fricción importante el rotor no alcanza la posición teórica de reposo.
• La carga debe estar perfectamente definida, y su inercia debe conocerse a1 menos en forma aproximada .
• Hay que tener en cuenta el comportamiento dinámico del conjunto (velocidades de trabajo, aceleración y desaceleración)
• Elegir una fuente de alimentación que pueda suministrar la máxima corriente requerida por el motor con la máxima tensión; ello permite utilizar resistencias externas de alto valor, que mejoren la constante de tiempo del sistema.
• Elegir incrementos de movimiento del sistema que sean múltiplos exactos del paso de1 motor. Ello permite obtener la máxima precisión de posicionado y simplifica e1 problema de control.
• Lograr una adecuada relación entre la inercia del sistema y la propia del rotor. Generalmente las curvas “cupla –velocidad” se obtienen con dinamómetros cuya inercia no es mayor de dos veces la inercia propia del motor por lo tanto en las aplicaciones prácticas es recomendable aproximarse a dicha relación.
Utilizar motores standard existentes en plaza. Consultar al fabricante cuando ninguno de los motores obtenibles satisfaga la aplicación.