Motores Paso a Paso
Motores Pasa a paso
Introduccin
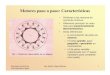
Los motores Paso a Paso son motores en los que podemos controlar
el desplazamiento del rotor en funcin de tensiones que se aplican a
las bobinas. Por lo que podemos conseguir controles de los
desplazamiento adelante y detrs y determinado numero de pasos por
vuelta.
Un motor paso a paso es un tipo de motor especial cuya principal
caracterstica es que gira de forma incremental (paso a paso), donde
cada paso representa un desplazamiento angular fijo del eje del
motor.
Los motores paso a paso, se controlan por el cambio de direccin
del flujo de corriente a travs de las bobinas que lo forman, en la
secuencia apropiada. Lo mas importante de un motor es saber el tipo
de motor que es, la potencia, el numero de pasos, el par de fuerza,
la tensin de alimentacin y poco mas si son motores sencillos.
En los motores bipolares la dificulta esta en controlar la
alimentacion y cambiar la polaridad y el ritmo de los bobinados
para conseguir el ritmo necesario para permitir que el motor
funcione correctamente.
Existen dos tipos de motores paso a paso:
Bipolares: Formados por dos bobinas. Tienen cuatro cables
externos. En los motores bipolares para que el motor funcione la
corriente que circula por los bobinados cambia de sentido en funcin
de la tensin que se aplica. por lo que un mismo bobinado puede
tener en uno de sus extremos distinta polaridad (bipolar).
Unipolares: Los motores unipolares se llaman as porque la
corriente que circula por los diferentes bobinados siempre circula
en el mismo sentido. Formados por cuatro bobinas. Cada par de
bobinas tienen un punto en comn (conexin central). Las conexiones
centrales se deben conectar al valor positivo de la alimentacin.
Tienen cinco, seis u ocho cables externos, dependiendo de si las
conexiones centrales se encuentran unidas internamente en un nico
cable, dos cables (conexiones centrales de cada par independientes)
o cuatro cables (los extremos de las conexiones centrales salen al
exterior).
Secuencia de pasos en un motor unipolar
Como hemos dicho antes, estos motores tienen cuatro bobinas, las
cuales activadas en la secuencia adecuada, provocan el
correspondiente imn que forzar al eje para que rote. El sentido de
giro depender del orden de activacin de las bobinas, de modo que un
sentido se corresponde con el orden 1-4 y el otro con el orden
4-1.
Existen dos secuencias bsicas en funcin del nmero de bobinas
activadas al mismo tiempo:
Secuencia bsica: Consiste en activar cada una de las bobinas de
forma independiente. Esto provoca que el eje del motor se oriente
hacia la bobina activada. En algunos motores esto brinda un
funcionamiento mas suave. La contrapartida es que al estar solo una
bobina activada, el torque de paso y retencin es menor.
Secuencia doble: Consiste en activar dos bobinas al mismo
tiempo, ambas consecutivas, de modo que el eje del motor se oriente
hacia el punto medio de ambas bobinas. Esta es la secuencia ms
usada y la que generalmente recomienda el fabricante. Con esta
secuencia el motor avanza un paso por vez y debido a que siempre
hay al menos dos bobinas activadas, se obtiene un alto torque de
paso y de retencin.
Secuencia de medio paso: Ambas secuencias permiten manejar el
mismo ngulo de giro, pero sitan el motor en posiciones distintas.
Si combinamos ambas secuencias, el resultado que se obtiene es un
paso ms corto (de echo es la mitad del paso generado en las
anteriores secuencias) y se sita el motor en todas las posiciones
de las secuencias anteriores, dando lugar a la secuencia de "medio
paso". En esta secuencia se activan las bobinas de tal forma de
brindar un movimiento igual a la mitad del paso real. Para ello se
activan primero 2 bobinas y luego solo 1 y as sucesivamente. Como
vemos en la tabla la secuencia completa consta de 8 movimientos en
lugar de 4
Como comentario final, cabe destacar que debido a que los
motores paso a paso son dispositivos mecnicos y como tal deben
vencer ciertas inercias, el tiempo de duracin y la frecuencia de
los pulsos aplicados es un punto muy importante a tener en cuenta.
En tal sentido el motor debe alcanzar el paso antes que la prxima
secuencia de pulsos comience. Si la frecuencia de pulsos es muy
elevada, el motor puede reaccionar en alguna de las siguientes
formas:
Puede que no realice ningn movimiento en absoluto.
Puede comenzar a vibrar pero sin llegar a girar.
Puede girar errticamente.
Puede llegar a girar en sentido opuesto.
Para obtener un arranque suave y preciso, es recomendable
comenzar con una frecuencia de pulso baja y gradualmente ir
aumentndola hasta la velocidad deseada sin superar la mxima
tolerada. El giro en reversa debera tambin ser realizado
previamente bajando la velocidad de giro y luego cambiar el sentido
de rotacin.Una referencia importante:
Cuando se trabaja con motores P-P usados o bien nuevos, pero de
los cuales no tenemos hojas de datos. Es posible averiguar la
distribucin de los cables a los bobinados y el cable comn en un
motor de paso unipolar de 5 o 6 cables siguiendo las instrucciones
que se detallan a continuacin:
1. Aislando el cable(s) comn que va a la fuente de alimentacin:
Como se aprecia en las figuras anteriores, en el caso de motores
con 6 cables, estos poseen dos cables comunes, pero generalmente
poseen el mismo color, por lo que lo mejor es unirlos antes de
comenzar las pruebas.
Usando un tester para chequear la resistencia entre pares de
cables, el cable comn ser el nico que tenga la mitad del valor de
la resistencia entre ella y el resto de los cables.
Esto es debido a que el cable comn tiene una bobina entre ella y
cualquier otro cable, mientras que cada uno de los otros cables
tienen dos bobinas entre ellos. De ah la mitad de la resistencia
medida en el cable comn.
2.Identificando los cables de las bobinas (A, B, C y D): aplicar
un voltaje al cable comn (generalmente 12 volts, pero puede ser ms
o menos) y manteniendo uno de los otros cables a masa (GND)
mientras vamos poniendo a masa cada uno de los dems cables de forma
alternada y observando los resultados.
El procedimiento puede ser especificado como sigue:
Seleccionar un cable y conectarlo a masa. Ese ser llamado cable
A.
Manteniendo el cable A conectado a masa, probar cul de los tres
cables restantes provoca un paso en sentido antihorario al ser
conectado tambin a masa. Ese ser el cable B.
Manteniendo el cable A conectado a masa, probar cul de los dos
cables restantes provoca un paso en sentido horario al ser
conectado a masa. Ese ser el cable D.
El ltimo cable debera ser el cable C. Para comprobarlo, basta
con conectarlo a masa, lo que no debera generar movimiento alguno
debido a que es la bobina opuesta a la A.