Embed Size (px)
Citation preview

26Technologies & Formations • n° 136
IntroductionLe thème de cet article est la suite logique de la modé-lisation générique [1] et concerne la problématique quepose la conception de stratégies de commande dessystèmes électromécaniques de nouvelle générationutilisés pour le positionnement à grande cadence. Parmices systèmes, on y retrouve les machines-outils, lesrobots, les dispositifs de transitique et, dans unemoindre mesure, tous les processus électromécaniquespilotés. L’objectif général est évidemment dans la réduc-tion des temps de production et passe nécessairementpar la diminution des inerties de toute nature et parl’augmentation des sollicitations globalement imposéesaux structures. Ces dispositions conjointes conduisent,
pour les machines concernées, à un comportementdynamique qui ne peut plus être négligé ; la réductiondes masses fait prévaloir le caractère élastique des liai-sons, amenant ainsi une situation de modes oscillatoiresdans la bande de fréquences d’utilisation de cessystèmes. La vélocité et la précision dynamique s’entrouvent alors considérablement affectées ce qui va àl’encontre des objectifs visés [2]. Pour un système élec-tromécanique tel qu’une machine de positionnement,une difficulté supplémentaire provient de la possibilitéou non de mesurer l’ensemble des déformations auniveau du point à contrôler lui-même.Quelle démarche suivre alors face à un processus auquelon souhaite imposer un comportement donné ? Imposerle comportement signifie souvent contrôler la trajectoire
Méthodologie de conception de la commande
des axes linéaires flexibles2e partie : synthèse de la commande
Frédéric Colas • Ghislain Rémy • Pierre-Jean BarreÉquipe de Recherche CEMODYNE, ENSAM, Lille
ette deuxième partie généralise le concept d’inversion de modèle.Nous proposons une méthodesystématique d’élaboration de la commande des processus électromécaniques à partir d’unmodèle utilisant le concept d’énergies localisées et décrit par le formalisme du Graphe Infor-
mationnel Causal. Les limites d’utilisation de ces techniques sont évoquées en fonction de critères telsque : les performances en poursuite et en régulation, l’influence des bruits de mesure, les limites éner-gétiques, les performances en suivi de trajectoire, la réalité technologique. On montre que certainessolutions, classiques ou particulières, sont retrouvées formellement. L’intérêt est de montrer l’aspectdéductif systématique de la démarche,visant à une recopie fidèle des trajectoires souhaitées. Ces prin-cipes d’inversion sont ensuite appliqués à la synthèse de commande d’un axe de robot cartésien pouren déduire une commande par retour accélérométrique qui permet de compenser directement l’effetd’un mode souple.Mots-clefs : Robot cartésien, Graphe Informationnel Causal, Synthèse de lois de commande, principed’inversion, retour accélérométrique.
C
Formation

27Technologies & Formations • n° 136 – Formation
d’une ou plusieurs composantes caractéristiques de lapuissance transférée (par exemple un courant ou unevitesse) en agissant sur les composantes duales (respec-tivement une tension ou un effort). Pour asseoir notrepropos, considérons le cas particulier des robots carté-siens dédiés à la décharge de presses à injection plas-tique (figure 1) déjà présentés dans la 1re partie. Pour desraisons de productivité et de compétitivité, la fabrica-tion de tels robots manipulateurs nécessite des dépla-cements et des positionnements de plus en plus préciset rapides. La conception de structures plus légèresrépond à ces préoccupations, mais les souplesses et flexi-bilités qui en résultent entraînent une grande sensibilitéaux différentes excitations. Cette sensibilité se traduit parl’apparition de phénomènes vibratoires lors du mouve-ment, dont la maîtrise passe généralement par une dimi-nution des performances globales de la machine, ce quiva à l’encontre des objectifs visés. Il s’ensuit que la com-mande d’un axe à dynamique élevée en translation nepeut plus sous-estimer l’influence des phénomènes vibra-toires sur les performances d’un mouvement réalisé [3].Ces remarques montrent que les lois de commandedoivent être conçues en prenant en compte le caractèrespécifique des axes considérés, et des procédures adap-tées sur la modulation d’effort sont à définir pour unpositionnement correct. Le nombre de problèmescouplés est important et, face à un tel contexte pluridis-ciplinaire, formalismes et méthodes sont incontour-nables pour établir une maîtrise générique de ce type desystèmes.Dans notre exemple, la transformation énergétique estorientée et il apparaît que la grandeur de commande ude l’actionneur, caractérisée, par exemple, en amplitudeet en durée, est porteuse d’une information à l’égard dela position y du point à contrôler. Si les composants dusystème étudié appartiennent à une classe de systèmespour laquelle il est possible de localiser des objets repré-sentatifs des transformations énergétiques internes, on
détermine une modélisation structurelle basée sur laconnaissance des phénomènes physiques. L’un des inté-rêts majeurs de la démarche est l’interprétation decomportement puisque, par principe, l’énergie se trans-fère, s’accumule ou se dissipe. Cette remarque illustrel’analyse ainsi établie que nous avons choisi de repré-senter en utilisant le formalisme du Graphe Informa-tionnel Causal (noté GIC). L’objectif fondamental de cetoutil est de proposer, par voie graphique et grâce à desprincipes simples, une structuration de la loi decommande prenant en compte la physique du processusà commander. Plusieurs articles ont été publiés etmontrent l’intérêt de l’outil GIC ainsi que ses propriétés[4-7]. La démarche de conception de la commandeprésentée dans ces références est basée sur une repré-sentation « naturelle » du processus et sur deux principesd’inversion complémentaires (direct et indirect) aboutis-sant à une architecture par contrôle de l’état du systèmecommandé.Cet article généralise ces concepts d’inversion et proposeune méthode systématique d’élaboration de lacommande des processus électromécaniques à partird’un modèle utilisant le concept d’énergies localisées etdécrit par le Graphe Informationnel Causal. Par souci declarté, le processus est supposé linéaire et à minimum dephase. On notera que la démarche se généralise facile-ment dans le cas des systèmes non linéaires plats [8]. Onmontre d’abord sur un exemple (commande d’unmoteur à courant continu) que certaines solutions, clas-siques ou particulières, peuvent être retrouvées formel-lement. L’intérêt est de montrer l’aspect déductifsystématique de la démarche. De plus, une meilleurecompréhension de la commande, élaborée à partir d’unmodèle de connaissance respectant la causalité naturelledu processus, permet d’éviter les pièges d’investigationshâtives ainsi que des méthodes de réglage de type« essais erreurs » souvent longues, coûteuses et surtoutmal maîtrisées. Ensuite, après avoir présenté le concept
Figure 1 : Robot cartésien dédié à la décharge de presse à injection plastique
ZONE PRESSE
ZONE DÉPOSECONVOYAGE
Vibrations de la charge en bout de braspour un déplacement horizontal de 500 mm

28Technologies & Formations • n° 136
général d’inversion de modèle, ces principes sont appli-qués au robot cartésien dont la modélisation a étéprésentée en 1re partie pour en déduire une commandepar retour accélérométrique.
Exemple d’inversion à partir d’un modèle GICLa démarche de conception d’une structure decommande est fortement liée à son domaine d’applica-tion, aux performances attendues mais aussi à sescontraintes extérieures. La question du choix de la struc-ture de commande se pose alors : Commande parboucles en cascades, correcteurs PID classiques,commande par retour d’état, commande floue,commande robuste, etc. Bien évidemment, la liste seraitbien longue et il est difficile de ne pas s’y perdre.Le Graphe Informationnel Causal [9] est un formalismequi permet d’établir un modèle de connaissance, paropposition aux modèles de comportement. Cela sous-entend que, plus le modèle est proche du système réel,plus la structure de commande sera adaptée au système.Un bon modèle permet donc de concevoir une bonnecommande. Après avoir présenté les principes d’inver-sion classiques, nous proposons ici de définir simple-ment sur un exemple largement étudié dans lalittérature (la commande d’un moteur à courant continu)les structures de commande qui découlent directementdes principes d’inversion du GIC. Les propriétés d’inver-sion du Graphe Informationnel Causal peuvent seregrouper en deux grandes familles :– la commande des systèmes non bouclés, plus connusous le nom de commande sans capteur, définie par leprincipe d’inversion directe du GIC ;– la commande des systèmes bouclés, c’est-à-dire avecasservissements, définie par le principe d’inversion indi-recte du GIC, car elle nécessite une mesure pouratteindre un objectif défini.
Principes d’inversion classiques
L’inversion de la relation associée à un processeur déter-mine une relation de commande elle-même associée àun autre processeur. Dans le cas général, l’assemblagede plusieurs objets formant un processus monovariable(une entrée de réglage) conduit à une relation f telleque :
où f est représentée dans le cas linéaire par une équationdifférentielle d’ordre n correspondant à la formecompagne de la modélisation du modèle d’état,
(2)0
( )( ).
in
i i
i
d y ta u t
dt=
=∑
( ) ( , ), (1)y t f u t=
➜
On se limite dans cette partie au cas où n � 0 ou n � 1.La partie 3 étudie le cas général où n est quelconque.Dans le cas où n � 0, il existe une relation instantanéeentre l’entrée et la sortie et on détermine facilement uneloi de commande par inversion directe (principe d’in-version rigide). La figure 2a illustre ce principe quiconduit à déterminer la grandeur de réglage ureg à partirde la trajectoire de référence yref souhaitée pour y. Ilvient :
Ce principe est applicable à toute relation bijective doncrigide (dissipateurs, opérateurs neutres). Il trouvera seslimites en cas de non linéarités irréversibles comme unesaturation.
(3)1
( ) ( , ), ( ) ( , ),
Si et alors ( ) ( )
reg ref
reg ref
R y t f u t Rc u t g y t
g f u u y t y t−
→ = → =
= = →
( )y t( )u t
( )refy t( )regu t
( )y t( )u t
( )refy t( )regu t
PROCESSUSCOMMANDE
Rc
R
(a)
( )y t( )u t
( )refy t( )regu t
( )y t( )u t
( )refy t( )regu t
PROCESSUSCOMMANDE
Rc
R
(b)
Figure 2 : (a) Principe d’inversion directe ou rigide, (b)Principe d’inversion indirecte ou causale
Le principe d’inversion indirecte (ou principe d’inversioncausal) découle du concept même d’asservissementappliqué au cas où n � 1. La figure 2b illustre ce conceptvisant à minimiser l’écart e � yref � y. La relation decommande est maintenant exprimée comme suit :
où c représente la fonction de correction. Elle est déter-minée de façon à assurer la stabilité du processuscommandé et à minimiser l’écart e. On peut écrire :
On constate alors que la réponse suit la référence indé-pendamment de la connaissance a priori du processus.De plus, si le gain de la relation de commande tend versune valeur infiniment grande, ce principe est théorique-ment indépendant de la nature de la relation. Ainsi, ils’applique autant à une relation non linéaire mal connuequ’à une relation causale, puisque la grandeur deréglage est obtenue à partir de l’écart entre la grandeurasservie et la trajectoire que l’on souhaite lui imposer.
Commande d’un moteur à courantcontinuOn considère le moteur à courant continu présentéfigure 3. Ce moteur est caractérisé par une inductance L,une résistance R et une constante de couple k. Il est
➜
(5)Si et alors ( ) ( ).reg refc u u y t y t→ ∞ = →
(4)( )( ), ,reg refRc u g c y y t→ = −

29Technologies & Formations • n° 136 – Formation
alimenté en tension (um) et traversé par un courant i. Ilfournit un couple Tem et permet de mettre en rotationune inertie notée J à la vitesse w. La position angulairede cette inertie est notée q et le coefficient de frottementvisqueux agissant sur l’arbre moteur fvis.
La figure 4 présente le modèle sous forme de GIC de lamachine à courant continu.L’application du principe d’inversion indirecte du GICpermet d’obtenir la structure de commande illustréefigure 5.Cette architecture de commande intègre la compensa-tion de la chute de tension ohmique, de la force contre-électromotrice et des frottements visqueux dans lesprocesseurs Rc3, Rc5 et Rc8 respectivement. Les correc-teurs utilisés dans les processeurs Rc2, Rc7 et Rc9 sont icide simples correcteurs à action proportionnelle. Toute-fois, ces phénomènes sont rarement compensés dans lesarchitectures de commande industrielles. L’architecturede commande précédente se simplifie alors sous laforme présentée figure 6.La compensation des erreurs induites par l’absence desprocesseurs Rc3, Rc5 et Rc8 est alors réalisée par lescorrecteurs des processeurs Rc2 et Rc7 qui associentFigure 3 : Moteur à continu à asservir
R5
R8R3
R1V
VR
VL
Tem
Tf
Tr
TmotR2 R4 R6 R7 R9
e
i
k
i
e w
w
w
q
1 L RR V V V e→ = − − 4 emR T k i→ = ⋅ 7 mot
dR J T
dtω→ ⋅ =
2 L
dR L
iV
dt→ ⋅ = 5R e k ω→ = ⋅ 8 f visR T f ω→ = ⋅
3 RR V R i→ = ⋅ 6 mot em f rR T T T T→ = − − 9dRdtθ ω→ =
Figure 4 : Représentation GIC du moteur à courant continu
%
% %
%
%
R5
R8R3
R1V
VREF
VR
VRREF
VL
VLREF
Tem
TemREF
Tf
TfREF
Tr
Tr
Tmot
TmotREF
R2 R4 R6 R7 R9
e
eREFeREF
i
iREF
iREF
k
k
i
i
e w
w
wREF
wREF
wREF
w
q
q
qREFRc1 Rc2
Rc3 Rc8
Rc5
Rc4 Rc6 Rc7 Rc9
Modèle
Commande
1 REG LREF RREF REFRc V V V e→ = + + 5 REF REFRc e k ω→ = ⋅%
( )2 LREF i REFRc V K i i→ = ⋅ −)
6 emREF motREF fREF rRc T T T T→ = + + %
3 RREF REFRc V R i→ = ⋅% ( )7 mot REF REFRc T Kω ω ω→ = ⋅ − )
4 /REF emRc i T k→ = % 8 fREF vis REFRc T f ω→ = ⋅%
( )9 REF REFRc Kθω θ θ→ = ⋅ −)
Figure 5 : Représentation GIC de la commande du moteur à courant continu

30Technologies & Formations • n° 136
généralement une action proportionnelle et une actionintégrale par l’utilisation de correcteurs PI.On remarquera que, dans ce dernier cas, on retrouve lastratégie de commande généralement utilisée pourasservir un actionneur en position à savoir une structurede commande par boucles en cascade où l’on retrouvetrois boucles imbriquées : une boucle de courant, uneboucle de vitesse et une boucle de position.
Concept général d’inversion de modèleCommander un processus, c’est contrôler les énergiesaccumulées par celui-ci. Cela revient aussi à imposer latrajectoire de l’une des composantes de la puissancetransmise en utilisant une autre composante de réglage.Par exemple, la maîtrise de la vitesse d’un mobile s’ob-tient par des actions modulées de l’effort qui lui estappliqué. Ce concept se généralise : « Puisque l’onconnaît l’effet de la cause, il suffit de créer la bonnecause pour avoir le bon effet », on parle alors d’inversioncausale [10]. On retrouve également ce principe sousl’appellation commande dynamique dans [11, 12].
Principe d’inversion directe
On considère le système représenté par la relation (2) eton souhaite généraliser, quel que soit l’ordre du systèmeà commander les principes d’inversion présentés précé-demment. Le principe d’inversion directe peut en effetse généraliser par le raisonnement suivant :
En posant 1
1 1
( )( ) ,
i
i i
d y tv t
dt
+
+ +=
➜
il vient .
En désignant yref la trajectoire souhaitée pour y, ondétermine une grandeur de réglage du processus ureg :
Il apparaît donc que la fonction f doit être inversible(système stable en boucle ouverte), ce qui signifie queyref doit être préalablement connue et continûment déri-vable jusqu’à l’ordre n telle que :
En posant
il vient
Dans le cas général, on aboutit à la figure 7 qui met enévidence plusieurs exigences :– la trajectoire yref doit être prédéfinie telle que la déri-vée nième puisse exister ;– les conditions initiales doivent être connues.Sur la figure 7, le modèle du processus résulte de l’in-terprétation graphique de l’expression (2) et (7). Ellemontre que si y représente la grandeur à maîtriser, il fautdisposer à tout instant de toutes ses dérivées jusqu’àl’ordre n. Cela nécessite donc une étude de la trajectoireafin de respecter les conditions de dérivation exigées.L’intérêt de cette démarche est de pouvoir maîtriser tousles états du système et donc de ne réaliser que des trajec-toires de y énergétiquement réalisables.
10
0
( ) ( )( ) .
ref ref
ref
i it
ii i
t
d y t d y tv t dt
dt dt+
=
⎛ ⎞= +⎜ ⎟⎜ ⎟⎝ ⎠ ∫
1
1 1
( )( ) ,
ref
ref
i
i i
d y tv t
dt
+
+ +=
(7)0
( )( ) .
inref
reg i i
i
d y tu t a
dt=
= ∑
(6)1
( ) ( , ), si
et alors ( ) ( ).REG REF
REG REF
u t g y t g f
u u y t y t
−= == →
10
0
( ) ( )( )
i it
ii it
d y t d y tv t dt
dt dt+
=
⎛ ⎞= +⎜ ⎟⎝ ⎠ ∫
%
% %
%
%
R5
R8R3
R1V
VREF
VR
VL
VLREF
Tem
TemREF
Tf
Tr
Tr
Tmot
TmotREF
R2 R4 R6 R7 R9
e
i
iREF
iREF
k
k
i
i
e w
w
wREF
w
q
q
qREFRc1 Rc2 Rc4 Rc6 Rc7 Rc9
Modèle
Commande
1 REG LREFRc V V→ = 6 emREF motREF rRc T T T→ = + % ( )17
m
mot REF REFm
sRc T K
sωτ ω ωτ
+ ⋅→ = ⋅ −⋅)
4 /REF emRc i T k→ = % ( )9 REF REFRc Kθω θ θ→ = ⋅ −)
( )12
i
LREF i REFi
sRc V K i i
s
ττ+ ⋅→ = ⋅ −⋅
)
Figure 6 : Architecture de commande simplifiée d’un moteur à courant continu

31Technologies & Formations • n° 136 – Formation
Se posent alors les questions concernant :– l’écart entre la dimension et les paramètres du modèle,et donc par inversion entre ceux de la commande etceux du processus réel ;– le comportement en régulation (rejet de perturba-tions) ;– l’élaboration de la référence pour maîtriser tout oupartie des grandeurs d’état avec une connaissance apriori du système et du procédé pour lequel le proces-sus est commandé ;– l’élaboration de la référence correspondant à la déri-vée nième (ordre du modèle de commande retenu) de lagrandeur à maîtriser. En effet, si l’on prend par exemplele domaine des machines de production (robot,machine-outil…), la position et la vitesse sont généréespar la CFAO. Par contre, qui va élaborer les autres déri-vées ?Pratiquement, ce type de commande n’est quasimentjamais utilisé seul.
Principe d’inversion indirecte
Le principe de l’inversion indirecte généralise le principed’inversion causale présenté figure 2b. Il consiste àcontrôler les n variables d’état du système à commander(figure 8). L’intérêt de la démarche est que tous les étatssont contrôlés. On aboutit alors à une commande parretour d’état classique.Avec :
On pourrait penser que le principe est universel, appli-cable à des relations mal connues, linéaires ou non. Enréalité, la présence de l’énergie emmagasinée dans leprocessus est à l’origine de retards dans les réponses
(8)1
0
( ) ( )( ) ( )
avec i variant de 0 à n − 1
( ) ( )
i iref
regii i i i
n
reg regii
i
d y t d y tRcii u t c t
dt dt
Rc u t u t−
=
⎧ ⎛ ⎞→ = −⎪ ⎜ ⎟
⎪ ⎝ ⎠⎨⎪
→ =⎪⎩ ∑
➜
Rn Ri a Ri b
Rcn Rci a Rci b Rc0 b
Modèle GIC du PROCESSUS
Modèle GIC de la COMMANDE
R0 b ( )y t( )u t
( )refy t( )regu t
( )refy t( )
1
1 1
( )( )
i
i i
d y tv t
dt
+
+ +=( )n
n
d y t
dt1
0
0( )
( )
( )
i
i
t
ii
it
d y t
d y t
v t dt dt
dt
+
=
⎛ ⎞⎜ ⎟⎝ ⎠
∫
( )iref
i
d y t
dt
1
1 1
( )( )
ref
ref
i
i i
d y tv t
dt
+
+ +=1
0
0 ( )
( )
( )ref
ref
ref
i
i
t
ii
i
t d y t
d y t
v t dt dt
dt
+
= 0t =
( )y t( ) 0t =
⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
∫
Figure 7 : Principe général d’inversion directe : commande directe à modèle
Rc Rci
Rcii+1
Rcii
Rci0 ( )refy t
( )iref
i
d y t
dt1
1
( )ref
i
i
d y t
dt
+
+
Rn Ri a Ri b
PROCESSUS
COMMANDE
R0 b ( )y t( )u t
uregii+1 (t)
uregii (t)
uregi0 (t)
( )u t
1
1 1
( )( )
i
i i
d y tv t
dt
+
+ +=( )n
n
d y t
dt1
0
0( )
( )
( )
i
i
t
ii
it
d y t
d y t
v t dt dt
dt
+
=
⎛ ⎞⎜ ⎟⎝ ⎠
∫( )y t( ) 0t =
Figure 8 : Généralisation du principe d’inversion indirecte

32Technologies & Formations • n° 136
conduisant la plupart du temps à des comportementsoscillatoires, voire instables. De plus, l’augmentation dugain de boucle accroît la bande passante pouvant allerjusqu’aux fréquences des bruits de mesure. La limite deréglage est alors atteinte et les performances dyna-miques du processus aussi. Ce sont les raisons pourlesquelles la notion de valeur infinie de gain dans la loide commande est fallacieuse et qu’il faut recourir à desfonctions plus complexes. Le cas le plus classique est lecorrecteur proportionnel et intégral ; celui-ci amène uneamplification infiniment grande de l’écart en régimestationnaire mais permet de respecter la stabilité dusystème grâce à la décroissance de cette amplificationavec la fréquence.
Couplage des deux principes d’inversionLa valeur de gain ne pouvant pas être infinie pour lesraisons évoquées précédemment, une solution consiste-rait à coupler les deux principes d’inversion, chacunamenant ses avantages (suivi de trajectoire pour l’inver-sion directe et rejet de perturbations pour l’inversionindirecte). La commande envoyée au système corres-pond alors à l’ajout de deux contributions, une prove-
➜
nant de la partie inversion directe et l’autre de l’inver-sion indirecte. Ce concept est illustré figure 9 où unecommande par inversion indirecte est couplée à unecommande par inversion directe.Avec :
À partir des relations (2) et (9), nous pouvons écrire :
Si les ami � ai (processus parfaitement identifié) et les(cas de la commande inverse directe) alors :
Si les ami � ai (processus non parfaitement identifié) et lesci Æ • (cas de la CMRE) alors :
( ) ( )i i
ref
ii i
d y t d y ta
dt dt= ∀
1
0 0 0
( ) ( ) ( ) ( )( )
i i i in n nref ref
i mi ii i i i
i i i
d y t d y t d y t d y ta a c t
dt dt dt dt
−
= = =
⎛ ⎞= + −⎜ ⎟⎝ ⎠∑ ∑ ∑
(9)avec i variant de 0 à n − 1
0
1
0
( )( )
( ) ( )( ) ( )
( ) ( ) ( )
inref
regd mi i
i
i iref
regii i i i
n
reg regd regii
i
d y tRcdn u t a
dt
d y t d y tRcii u t c t
dt dt
Rcn u t u t u t
=
−
=
→ =
⎛ ⎞→ = −⎜ ⎟
⎝ ⎠
→ = +
∑
∑
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
Rc
Rc
Rci
Rcii+1
Rcii
Rci0 ( )refy t
Rn Ri a Ri b
PROCESSUS
COMMANDE
R0 b ( )y t
uregii+1 (t)
uregii (t)
uregi0 (t)
( )u t
( )u t
( )u t
1
1 1
( )( )
i
i i
d y tv t
dt
+
+ +=( )n
n
d y t
dt1
0
0( )
( )
( )
i
i
t
ii
it
d y t
d y t
v t dt dt
dt
+
=
⎛ ⎞⎜ ⎟⎝ ⎠
∫( )y t( ) 0t =
Rcd Rcdi a Rcdi b Rcd0 b ( )refy t
( )refy t( )
( )préc
ass
u t
( )iref
i
d y t
dt
1
1 1
( )( )
ref
ref
i
i i
d y tv t
dt
+
+ +=1
0
0
( )
( )
( )ref
ref
ref
i
i
t
i i
i
t
d y t
d y t
v t dtdt
dt
+
= 0t =
⎛ ⎞⎜⎜ ⎟⎝ ⎠
∫
Asservissement (Inversion indirecte)
Loi de mouvement (Inversion directe)
Précommande (Inversion directe)
Figure 9 : Commande utilisant le couplage des deux principes d’inversion – Commande à modèle de référence des états(CMRE)

33Technologies & Formations • n° 136 – Formation
Si c0 Æ • mais les autres quelconques alors y(t) Æ yref(t),
donc et a fortiori les dérivées
successives
Si ci Æ • et les autres quelconques, alors ce ne sera pasle cas !Ce couplage fait apparaître deux degrés de liberté :– une inversion directe comprenant une précommandequi intègre la dynamique du système à commander etune génération de lois de mouvement ;– une inversion indirecte comprenant un asservisse-ment.On notera qu’il reste une partie non étudiée dans cetarticle à savoir la génération de la dérivée nième de lasortie y. Elle est, en fait, réalisée par la partie généra-tion de lois de mouvement qui sera chargée de générerles références nécessaires à la précommande et à l’as-servissement, nous renvoyons le lecteur vers [13] pourune analyse détaillée de cette génération de lois de mou-vement.
Application à la synthèse de commande d’un axe de robot cartésienUn des principaux inconvénients dans le contrôle de laplupart des axes souples industriels est le manque deretour d’information sur la partie à contrôler. Dans lamajorité des applications industrielles, seul l’actionneurest commandé en boucle fermée tandis que la charge
( ) ( )i i
ref
i i
d y t d y t
dt dt→
( ) ( )refdy t dy t
dt dt→
( ) ( )i i
ref
i i
d y t d y t
dt dt→
(dans notre cas l’extrémité du bras) est commandée enboucle ouverte. Il a été montré dans [14] que l’impossi-bilité de mesurer le comportement de la charge combi-née avec le faible amortissement de la structuremécanique réduit énormément les performances de lacommande. Comme il est excessif voire impossible pourun industriel d’investir dans un appareil de mesure deposition de la charge (comme un laser, une caméra outout type de capteur de position sans contact), fixer unaccéléromètre sur celle-ci permet d’obtenir une infor-mation supplémentaire pour un coût réduit. Cependant,déduire une information de vitesse ou de position àpartir d’une mesure d’accélération, en l’intégrant uneou deux fois par exemple, étant très difficile à cause desbruits (offset de mesure, résolution du capteur, etc.), ilest donc nécessaire de connaître la façon d’utiliser cettenouvelle information dans notre structure decommande.Cette partie aborde les points suivants : après avoirrappeler le modèle utilisé, l’algorithme de commandepar retour accélérométrique est déduit en appliquantdes principes d’inversion sur le GIC du modèle soupleavant de présenter les résultats expérimentaux obtenussur un robot cartésien.
Modélisation d’un axe de robot cartésien
Dans le cas des axes souples en translation, nous avonsmontré, dans la 1re partie de cette étude générale, quela discrétisation du modèle de comportement amenaitdirectement à un système à non-minimum de phasemais que l’influence du zéro instable sur le comporte-ment dynamique était suffisamment négligeable pourne pas tenir compte de ce phénomène.Nous supposons donc pour cette partie que le systèmeest linéaire et à minimum de phase.
➜
Figure 10 : Modèle utilisé pour la conception d’une architecture de commande adaptée à un axe de robot cartésien
M1 M2
kf(t)
y1 y2

34Technologies & Formations • n° 136
Les résultats issus de la modélisation effectuée dans la1re partie ont montré que le comportement d’un axepeut être représenté par le modèle à paramètres locali-sés présenté figure 10 où y1 représente la position mesu-rée au niveau de l’actionneur, y2 la position del’extrémité de l’axe (position de la charge) et f l’effort depoussée provenant de l’actionneur. Nous attirons l’at-tention du lecteur sur l’impossibilité de mesurer la posi-tion y2, ce qui limitera les possibilités d’application desprincipes d’inversion par la suite.La représentation de ce modèle par Graphe Informa-tionnel Causal est donnée Erreur ! Source du renvoiintrouvable.
Commande par retour accélérométrique
Nous proposons ici deux stratégies de commandenumérotées 1 et 2 :– contrôle de la position mesurée au niveau de l’action-neur (contrôle de y1) ;– contrôle de la position de la charge (contrôle de y2).
Contrôle de la position de l’actionneur y1Le contrôle de la position de l’actionneur s’obtient enappliquant les principes d’inversion présentés précé-demment sur les relations correspondant au comporte-ment de la masse M1 (R1 à R3). La représentation GIC de
➜
R4 R5 R6
R1 R2 R3
R7k
M2
M1
( )f t
chargeF
21
2
d y
dt
21
21 ( ) charge
d y
1y
R f t
( )t
Fdt
→ = −
1dy
dt
( ) 1
13d dy
R ydt dt
→ = charge5
dFR k v
dt→ = ∆
v∆
21 1
22
d dy d yR
dt dt dt
⎛ ⎞→ =⎜ ⎟⎝ ⎠
2dy
dt
1 24
dy dyR v
dt dt→ ∆ = −
22
2
d y
dt
22
2 charge26
d yR M F
dt→ =
22 2
27
d dy d yR
dt dt dt
⎛ ⎞→ =⎜ ⎟⎝ ⎠
Figure 11 : Représentation GIC du modèle utilisé pour la conception d’une architecture de commande adaptée à un axede robot cartésien
( )t
( )t
R1 R2 R3( )f t
chargeF 21
2
d y
dt 1y ( )t1dy
dt
Rci3
Rci2
Ro6
Rcd1 Rcd2 Rcd3
PROCESSUS
COMMANDE
regu
21
charge 1 2 32ˆ1
ref
reg Rci Rci
d yRcd u F M u u
dt→ = + + +
1refdy
dt
1 122
refRci v
dy dyRci u k
dt dt
⎛ ⎞→ = −⎜ ⎟⎝ ⎠
21
2
refd y
1refy
dt
21 1
22
ref refd dy d yRcd
dt dt dt
⎛ ⎞→ =⎜ ⎟⎝ ⎠ ( )3 1 13 Rci p refRci u k y y→ = −
( ) 1
13ref
ref
d dyRcd y
dt dt→ =
22
charge 2 2ˆ6
d yRo F M
dt→ =
Figure 12 : Représentation GIC de la stratégie de commande n° 1 : contrôle de la position y1

35Technologies & Formations • n° 136 – Formation
cette stratégie de commande est présentée figure 12.L’algorithme de commande se résume alors à un retouraccélérométrique associé à une anticipation d’accéléra-tion et un correcteur Proportionnel-Dérivée :
Si l’on considère qu’un accéléromètre placé sur M2 nous
permet de mesurer parfaitement , cette loi de
commande permet un suivi de trajectoire parfait auniveau de M1 indépendamment des variations deraideur k. On retrouve l’algorithme que Luo et Saridisavaient proposé [15]. Cette fois-ci, plutôt que d’utiliserla théorie de la commande optimale, une méthodeentièrement graphique a été utilisée pour retrouver lemême résultat. Dans le cas général, cet algorithmerequiert une estimation de couple et des accélérationsau niveau des articulations du robot, qui rendent, enpratique, une telle méthode difficile à appliquer. Dans lecas de la commande par retour accélérométrique appli-quée à un système cartésien du type masses-ressorts,l’expression de cette commande est très simple et nedépend que des masses modales M1 et M2 [16].
22
2
d y
dt
(10)( )2 2
2 1 1 12 1 1 12 2
ref ref
refreg v p
d y d y dy dyu M M k k y y
dt dt dt dt
⎛ ⎞= + + − + −⎜ ⎟⎝ ⎠
Contrôle de la position de la charge y2La méthode précédente consiste à fixer une trajectoirede référence au niveau de la position moteur. Or, lepoint que l’on souhaite contrôler se situe au niveau dela charge. Une autre méthode de contrôle complémen-taire consiste à définir une trajectoire de référence pourla position de la charge (sans vibration bien sûr). Lecontrôle de la position de la charge se déduit directe-ment en appliquant une inversion directe sur les rela-tions R4 à R7. La représentation GIC de cette stratégie decommande est présentée figure 13 (seule les relationsRcd4 à Rcd6 ont été explicitées).L’algorithme de commande se réduit alors à l’expressionsuivante :
On remarquera que cette stratégie de commandeimpose au générateur de lois de mouvement de géné-rer une loi de mouvement au moins quatre fois déri-vable. Il faut donc que le snap (dérivée quatrième de laposition) soit défini, la position de référence doit être aumoins de classe �4.
(11)( )
2 4 21 2 2 2
2 4 2
2 22 1 1 1
2 1 1 12 2 ref
ref ref ref
ref ref
reg v p
d y M d y d y
dt k dt dt
d y d y dy dyu M M k k y y
dt dt dt dt
= +
⎛ ⎞= + + − + −⎜ ⎟⎝ ⎠
( )t
( )t
( )f t
Rci3
Rci2
Ro6
Rcd1 Rcd2 Rcd3
PROCESSUS
COMMANDE
Rcd4 Rcd5 Rcd6
regu
1refdy
dt
21
2
refd y
1refy
dt
( )t4
1
4
refd y
dt
( )t3
1
3
refd y
dt
R4 R5 R6
R1 R2 R3
R7chargeF
21
2
d y
dt 1y ( )t1dy
dt
v∆2dy
dt
22
2
d y
dt
3 42 2
3 45
ref refd d y d yRcd
dt dt dt
⎛ ⎞→ =⎜ ⎟
⎝ ⎠
2 32 2
2 36ref refd d y d y
Rcidt dt dt
⎛ ⎞→ =⎜ ⎟
⎝ ⎠2 4 2
1 2 2 2
2 4 24
ref ref refd y M d y d yRcd
dt k dt dt→ = +
Figure 13 : Représentation GIC de la stratégie de commande n° 2 : contrôle de la position y2
36Technologies & Formations • n° 136
Validations expérimentales
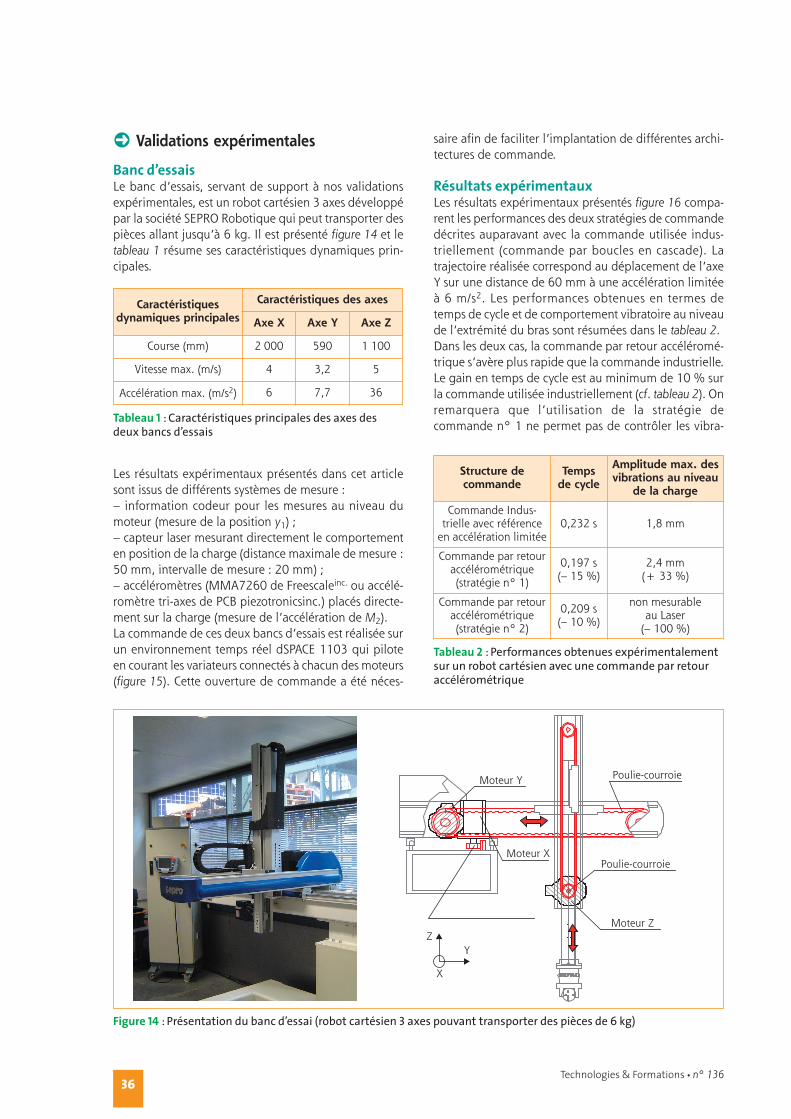
Banc d’essaisLe banc d’essais, servant de support à nos validationsexpérimentales, est un robot cartésien 3 axes développépar la société SEPRO Robotique qui peut transporter despièces allant jusqu’à 6 kg. Il est présenté figure 14 et letableau 1 résume ses caractéristiques dynamiques prin-cipales.
➜ saire afin de faciliter l’implantation de différentes archi-tectures de commande.
Résultats expérimentauxLes résultats expérimentaux présentés figure 16 compa-rent les performances des deux stratégies de commandedécrites auparavant avec la commande utilisée indus-triellement (commande par boucles en cascade). Latrajectoire réalisée correspond au déplacement de l’axeY sur une distance de 60 mm à une accélération limitéeà 6 m/s2. Les performances obtenues en termes detemps de cycle et de comportement vibratoire au niveaude l’extrémité du bras sont résumées dans le tableau 2.Dans les deux cas, la commande par retour accéléromé-trique s’avère plus rapide que la commande industrielle.Le gain en temps de cycle est au minimum de 10 % surla commande utilisée industriellement (cf. tableau 2). Onremarquera que l’utilisation de la stratégie decommande n° 1 ne permet pas de contrôler les vibra-
Figure 14 : Présentation du banc d’essai (robot cartésien 3 axes pouvant transporter des pièces de 6 kg)
X
YZ
Poulie-courroie
Poulie-courroie
Moteur Z
Moteur X
Moteur Y
Caractéristiques dynamiques principales
Caractéristiques des axes
Axe X Axe Y Axe Z
Course (mm) 2 000 590 1 100
Vitesse max. (m/s) 4 3,2 5
Accélération max. (m/s2) 6 7,7 36
Tableau 1 : Caractéristiques principales des axes desdeux bancs d’essais
Les résultats expérimentaux présentés dans cet articlesont issus de différents systèmes de mesure :– information codeur pour les mesures au niveau dumoteur (mesure de la position y1) ;– capteur laser mesurant directement le comportementen position de la charge (distance maximale de mesure :50 mm, intervalle de mesure : 20 mm) ;– accéléromètres (MMA7260 de Freescaleinc. ou accélé-romètre tri-axes de PCB piezotronicsinc.) placés directe-ment sur la charge (mesure de l’accélération de M2).La commande de ces deux bancs d’essais est réalisée surun environnement temps réel dSPACE 1103 qui piloteen courant les variateurs connectés à chacun des moteurs(figure 15). Cette ouverture de commande a été néces-
Structure decommande
Temps de cycle
Amplitude max. desvibrations au niveau
de la charge
Commande Indus-trielle avec référence
en accélération limitée0,232 s 1,8 mm
Commande par retouraccélérométrique (stratégie n° 1)
0,197 s(– 15 %)
2,4 mm(+ 33 %)
Commande par retouraccélérométrique (stratégie n° 2)
0,209 s(– 10 %)
non mesurable au Laser
(– 100 %)
Tableau 2 : Performances obtenues expérimentalementsur un robot cartésien avec une commande par retouraccélérométrique

37Technologies & Formations • n° 136 – Formation
Figure 15 : Ouverture de la commande des deux bancs d’essais à l’aide d’un environnement temps réel dSPACE
Figure 16 : Réponses obtenues expérimentalement sur le banc d’essais avec une commande par retour accéléromé-trique pour un déplacement de l’axe Y de 60 mm et comparaison avec la commande industrielle
Posi
tion
mot
eur
en m
mPo
siti
on d
e la
cha
rge
en m
m
Posi
tion
mot
eur
en m
mPo
siti
on d
e la
cha
rge
en m
mRobot caretésien 3 axes Armoire existante
Matlab/Simulink
Environnementtemps réel

38Technologies & Formations • n° 136
tions au niveau de la charge, seule la maîtrise de latrajectoire au niveau de l’actionneur est réalisée. Lesrésultats obtenus avec la stratégie de commande n° 2montrent, quand à eux, que la position de la charge estcette fois-ci parfaitement contrôlée, les vibrations rési-duelles ont totalement disparues. Expérimentalement,elles ne sont ni visibles par l’opérateur ni par la mesureeffectuée au capteur laser.
ConclusionCet article propose une méthode systématique d’élabo-ration de structures de commande à partir d’une notiond’inversion de modèle de processus électromécaniqueutilisant le concept d’énergies localisées. La démarchede modélisation et de conception de la commande estappliquée à une structure décrite par le Graphe Infor-mationnel Causal (GIC). Elle n’a pas la prétention derésoudre tous les problèmes, mais elle contribue effica-cement à orienter la pensée et à s’interroger sur la struc-ture du modèle envisagé pour un système physiquedonné en vue de le commander. Son principal avantageest d’éviter un développement mathématique immé-diat, rapidement hermétique. Ainsi, le modèle doitd’abord être bien posé avec les relations explicitées sousla forme de lois fondamentales de la physique enprenant en compte la causalité naturelle d’un système.Nous montrons que certaines architectures classiques decommande telle que la commande à boucles en cascaded’un moteur à courant continu sont retrouvées formel-lement. L’intérêt est de montrer l’aspect déductif systé-matique de la démarche, visant à une recopie fidèle destrajectoires souhaitées. De plus, une meilleure compré-hension de la commande, élaborée à partir d’un modèlede connaissance respectant la causalité naturelle duprocessus, permet d’éviter les pièges d’investigationshâtives ainsi que des méthodes de réglage de type« essais erreurs ». La méthodologie proposée devient ungarant contre les recettes et les habitudes pouvantparfois conduire à des erreurs graves.Cette méthodologie de synthèse de commande a étéappliquée à un robot cartésien dont la modélisationavait été étudiée dans une 1re partie. Dans ce cas d’ap-plication, l’utilisation d’un accéléromètre placé en boutde bras permet d’obtenir une information supplémen-taire pour un faible coût. L’application des principesd’inversion basés sur le formalisme GIC permet dedéduire de quelle manière utiliser cette information. Lastructure de commande obtenue correspond à unecommande par retour accélérométrique qui compensedirectement l’effet d’un mode souple. Lorsque les para-mètres du modèle sont bien connus, cette commandeassure théoriquement un suivi de trajectoire parfait auniveau du moteur. Deux stratégies ont été développées,elles permettent de réaliser soit un contrôle au niveau del’actionneur soit un contrôle au niveau de la charge et
Bibliographie[1] J. Holtz, L. Springob,“Identification and compensation oftorque ripple in high-precision permanent magnet motordrives”, IEEE Trans. On Ind. Elect., vol. 43, pp. 309-320, 1996.[2] D.C. Hanselman, “Minimum torque ripple, maximumeffiency excitation of brushless permanent magnetmotors”, IEEE Trans. On Ind. Elect., vol. 41, pp.292-300, 1994.[3] B. Armstrong-Helouvry, P. Dupont, C.C. de Wit, “A surveyof models, analysis tools and compensation methods forthe control of machines with friction”, Automatica, vol. 30,pp. 1083-1138, 1994.[4] J.H. Ginsberg, Mechanical and Structural Vibrations:Theory and Applications. New York:John Wiley & Sons,2001.[5] C. M. Harris, Shock and Vibration Handbook (fourthedition). New York: McGraw-Hill, 1996.[6] S. Park, W. K. Chung, Y. Youm, “Natural frequencies andopen-loop responses of an elastic beam fixed on a movingcart and carrying an intermediate lumped mass”, Journal ofSound and Vibration, Vol. 230, pp. 591-615, 2000.[7] S.S. Ge,T.H. Lee, G. Zhu,“Asymptotically stable end-pointregulation of a flexible SCARA/Cartesian robot”, IEEE/ASMETransactions on Mechatronics, vol. 3, pp. 138-144, 1998.[8] S. Park, B.K. Kim, Y. Youm, “Single-mode vibrationsuppression for a beam-mass-cart system using inputpreshaping with a robust internal-loop compensator”, Jour-nal of Sound and Vibration, Vol. 241, pp. 693-716, April 2001.[9] B.K. Kim, S. Park,W.K. Chung, Y. Youm,“Robust controllerdesign for PTP motion of vertical XY positioning systemswith a flexible beam”, IEEE/ASME Transactions on Mecha-tronics, vol. 8, pp. 99-110, March 2003.[10] D. C. Karnopp, D.L. Margolis, R.C. Rosenberg, Systemdynamics: modeling and simulation of mechatronic systems(third edition). New York:Wiley-Interscience, 2000.[11] D.L.Margolis,“Bond Graphs,normal Modes and vehiculeStructures”, Vehicule System Dynamics, vol. 7, pp. 49-63,1978.[12] D.L. Margolis, “Dynamics models for multidimensionalstructures using Bond Graphs”, Journal of Dynamic Systems,Measurement, and Control, vol. 102, pp. 180-187, 1980.[13] P.J. Barre, J.P. Hautier, J. Charley,“The use of modal analy-sis to improve the axis control”, in Proc.Fourth InternationalCongress on Sound and Vibration, St Petersburg, pp. 1531-1538 , June 24-27, 1996.[14] D.J. Ewins, Modal Testing: Theory, Practice and Applica-tion. Hertfordshire: Research Studies Press Ltd, 1999.[15] J. P. Hautier, P. J. Barre, « The Causal Ordering Graph Atool for system modelling and control law synthesis », Jour-nal of studies in informatics and control,Vol. 13 (4),p.265-283,2004.
donc de gérer facilement le compromis entre-temps decycle et maîtrise du comportement vibratoire dusystème.





























