Embed Size (px)
Citation preview

WWW.UNICORECOMM.COM
COMMANDS and LOGS
Reference Book
Multi-System High PrecisionOEM Boards/Receivers
Copyright© 2009-2015, Unicore Communications, Inc.Data subject to change without notice.

I
前言
本《指令参考手册》为您提供有关和芯星通高精度GNSS板卡和接收机的指令及Log参考,
接收机默认配置,及相关使用示例等。
注:本手册为通用版本,请用户根据实际购买产品的型号、配置,针对 CORS、RTK、Heading
等不同使用需求选择参考阅读。
适用读者
本《指令参考手册》适用于对GNSS接收机有一定了解的技术人员使用。它并不面向一般读者。
文档结构 本《指令参考手册》包括以下各章内容:
1. 指令参考:输入指令功能介绍及参考范例
2. LOG参考:LOG输出的相关描述及参考范例
3. 接收机默认配置:接收机出厂配置参数
4. 32位CRC校验:ASCII和二进制格式的log消息都包含32位CRC校验, 本节提供生成
CRC校验位的C语言示例
5. 网络配置示例:用户使用相关功能时配置网络和FTP存储的详细步骤
6. UDP 连接示例:使用UDP连接前需要配置网络参数连接步骤
7. RTK 配置示例:配置接收机的RTK参数的详细步骤
8. 定向应用配置实例
II
目录
1. 指令参考 ......................................................................................................................................... - 1 -
1.1 指令格式 ......................................................................................................................... - 1 -
1.2 ANTENNAPOWER 配置天线馈电 ................................................................................ - 1 -
1.3 ASSIGNALL 将所有通道设为特定相同配置 .................................................................. - 1 -
1.4 AUTHCODE 为接收机/板卡增加授权码 ........................................................................ - 2 -
1.5 CLOCKSWITCH 启用/禁用外部时钟 .............................................................................. - 3 -
1.6 COM 串口控制 ............................................................................................................... - 3 -
1.7 DATASERVERCONFIG 配置数据服务器 ...................................................................... - 4 -
1.8 ECUTOFF 设置卫星截止高度角 ..................................................................................... - 5 -
1.9 FIX 设置基准站坐标 ....................................................................................................... - 5 -
1.10 FRESET 清除 NVM 中选中的数据并重新设置接收机 ................................................... - 6 -
1.11 HEADING 设置定向工作模式 ......................................................................................... - 6 - 1.12 HEADINGMODE ............................................................................................................ - 7 - 1.13 HEADINGOFFSET 设置航向和俯仰改正值 .................................................................. - 7 -
1.14 INTERFACEMODE 设置串口发送/接收模式................................................................. - 8 -
1.15 LOG 请求接收机输出信息 ............................................................................................. - 9 -
1.16 MOVINGBASESTATION 设置移动基站 ....................................................................... - 12 -
1.17 NETCONFIG 设置网络配置 ........................................................................................ - 13 -
1.18 NETPORTCONFIG 配置网络端口 .............................................................................. - 14 -
1.19 NETUPLOAD 设置数据上传参数 ................................................................................ - 14 -
1.20 NMEATALKER 设置 NMEA TALKER ID ........................................................................ - 15 -
1.21 NTRIPCONFIG 配置 NTRIP ....................................................................................... - 15 -
1.22 PASSWD 配置网络连接的密码 ................................................................................... - 16 -
1.23 PPSCONFIG 配置 PPS ................................................................................................ - 17 -
1.24 RTKCOMMAND 将 RTK 解算重启或配置为默认值 .................................................... - 17 -
1.25 RTKDYNAMICS 设置 RTK 动态模式 .......................................................................... - 18 -
1.26 RTKTIMEOUT 设置 RTK 数据最大龄期 ...................................................................... - 19 -
1.27 SAVECONFIG 将当前配置保存到非易失性存储器(NVM) ...................................... - 19 -
1.28 SYSCONTROL 控制跟踪卫星的系统.......................................................................... - 20 -
1.29 UNDULATION 选择水准面模型 .................................................................................. - 20 -
1.30 UNLOG 停止特定 LOG 输出 ......................................................................................... - 21 -
1.31 UNLOGALL 停止输出所有 LOG .................................................................................. - 21 -
2. Log 参考 ...................................................................................................................................... - 23 -
2.1 LOG 头格式 .................................................................................................................. - 23 -
2.1.1 二进制格式 .................................................................................................................... - 23 -
2.1.2 ASCII 格式 .................................................................................................................... - 25 -
2.2 BD2EPHEM 北斗星历数据 ......................................................................................... - 26 -
2.3 BD2IONUTC 北斗电离层参数及 UTC 数据 ................................................................ - 29 -
2.4 BESTPOS 最佳位置 ................................................................................................... - 30 -
2.5 BESTVEL 最佳可用速度 ............................................................................................. - 31 -
2.6 BINEX BINEX 数据流 ................................................................................................. - 32 -

III
2.7 CMR CRM 差分电文 ................................................................................................... - 32 -
2.8 COMCONFIG COM 口当前配置 ................................................................................. - 32 -
2.9 GLOEPHEMERIS GLONASS 星历数据..................................................................... - 34 -
2.10 GPSEPHEM GPS 星历数据 ....................................................................................... - 36 -
2.11 GPGGA GPS 固定数据输出语句 .................................................................................. - 38 -
2.12 GPGSA GPS 的 DOP 值和有效卫星信息 ...................................................................... - 39 -
2.13 GPGST 伪距观测精度................................................................................................... - 40 -
2.14 GPGSV 可视卫星状态输出 ........................................................................................... - 41 -
2.15 GPHDT GPS 航向信息 LOG ........................................................................................ - 41 -
2.16 GPRMC GPS 推荐信息................................................................................................. - 42 -
2.17 GPVTG 航迹角与地速................................................................................................... - 43 -
2.18 GPZDA UTC 时间和日期 .............................................................................................. - 44 -
2.19 HEADING 航向信息 ..................................................................................................... - 44 -
2.20 IONUTC GPS 电离层参数及 UTC 数据 ..................................................................... - 45 -
2.21 LOGLIST LOG 列表 ...................................................................................................... - 46 -
2.22 MATCHEDPOS 匹配的 RTK 位置 ............................................................................... - 47 -
2.23 MATCHEDPOSH 匹配的 RTK 位置 ............................................................................. - 49 -
2.24 NETSTATUS 网络状态 ............................................................................................... - 50 -
2.25 PASSCOM 转发数据 .................................................................................................... - 51 -
2.26 PSRDOP 伪距 DOP ................................................................................................... - 51 -
2.27 PSRPOS 伪距位置信息 .............................................................................................. - 52 -
2.28 PSRVEL 伪距速度 ...................................................................................................... - 54 -
2.29 RANGE 原始观测数据信息 ........................................................................................... - 55 -
2.30 RANGEH 原始观测数据信息 ........................................................................................ - 59 -
2.31 RANGECMP 压缩格式原始观测数据信息 ..................................................................... - 60 -
2.32 REFSTATION 基站位置及健康度 ................................................................................ - 63 -
2.33 RTCM V2 差分电文 ....................................................................................................... - 64 -
2.34 RTCM V3 差分电文 ....................................................................................................... - 65 -
2.35 RTKDATA RTK 解算参数 .............................................................................................. - 66 -
2.36 RTKDATAH RTK 解算参数 ......................................................................................... - 69 -
2.37 RTKDOP RTK 滤波器的 DOP 值 ............................................................................... - 70 -
2.38 RTKPOS RTK 低延迟定位数据 .................................................................................... - 71 -
2.39 RTKVEL RTK 速度 ....................................................................................................... - 72 -
2.40 SATVIS 可见卫星 ........................................................................................................ - 73 -
2.41 TIME 时间信息 ............................................................................................................ - 74 -
2.42 VERSION 版本信息 ...................................................................................................... - 76 -
2.43 通过相关命令查询接收机设置 ....................................................................................... - 78 -
3. 接收机默认配置 ......................................................................................................................... - 78 -
4. 32 位 CRC 校验 .......................................................................................................................... - 80 -
5. 网络配置示例 ............................................................................................................................. - 82 -
6. UDP 连接示例 ............................................................................................................................ - 82 -
7. RTK 应用配置示例.................................................................................................................... - 82 -
8. 定向应用配置实例..................................................................................................................... - 83 -

- 1 -
1. 指令参考
1.1 指令格式
本版本仅支持简化 ASCII 格式。无校验位的简化 ASCII 格式更便于用户的指令输入。
所有指令由指令头和配置参数(参数部分可以为空,则该指令只有一个指令头)组成,头字段
包含指令名称或消息头。
1.2 ANTENNAPOWER 配置天线馈电
该指令启用或禁用接收机内部电源对有源天线的低噪声放大器(LNA)的馈电。
简化 ASCII 语法
ANTENNAPOWER switch
输入示例: ANTENNAPOWER ON
ID 字段 ASCII 值 描述
1 ANTENNAPOWER Header
-
2 switch OFF 禁用内部天线馈电
ON 启用内部天线馈电(默认)
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.3 ASSIGNALL 将所有通道设为特定相同配置
此命令允许手动配置所有接收机通道分配和重捕获。
简化 ASCII 语法
ASSIGNALL [system][state][prn [Doppler [Doppler window]]]
输入示例: ASSIGNALL GPS ACTIVE 29 0 2000
要取消此前 ASSIGNALL 指定的设置,可输入 ASSIGNALL,将所有系统通道的分配恢复为 AUTO。
ID 字段 ASCII 值 描述
1 ASSIGNALL header
-
2 system 参考表 1 系统类型 SV 通道跟踪的系统
3 state 参考表 2 通道状态 设置 SV 通道状态
4 prn GPS: 1 ~ 32, GLONASS: 38 ~61, BD2 161 ~ 197
如果该参数未包括在命令行中,state 参数必
须设置为空闲(IDLE)或自动(AUTO)。

用户指令手册
- 2 -
ID 字段 ASCII 值 描述
5 Doppler -100 000 to 100 000 Hz
当前卫星多普勒偏移。
注意:多普勒频率计算中必须考虑卫星运动、
接收机天线移动和接收机时钟频率误差。(默
认值 = 0)
6 Doppler window
0 to 10 000 Hz 上述多普勒估值误差或不确定性。该值为
±(如, 500 则为± 500 Hz). (默认值 =4500)
如果设定的 Doppler 和 Doppler window 导致跟踪不到卫星信号,接收机将使用默认值
来保持良好信号跟踪。
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
表 1 系统类型
ASCII 描述
GPS GPS 系统
BD2 北斗系统
GLONASS GLONASS 系统
表 2 通道状态
ASCII 描述
IDLE SV 通道不跟踪任何卫星
ACTIVE 将 SV 通道设为有效(默认)
AUTO 通知接收机为通道自动分配 PRN 号
1.4 AUTHCODE 为接收机/板卡增加授权码
此命令用于为接收机添加或删除授权码。一旦使用此命令输入正确的授权码后,接收机将会自
动保存授权信息,并重启。接收机内保存的授权信息无法用更新固件或 FRESET 命令擦除。
简化 ASCII 语法
AUTHCODEstring [model]
ID 字段 ASCII 值 描述
1 AUTHCODE header - 此处包含指令名称或消息头,取决于指令
格式为简化ASCII,ASCII,还是二进制。
2 codestring String 授权码字符串。
3 model String 接收机的型号名。

- 3 -
许可文件中提供 MODE 值。此命令在接收机重启后生效。
1.5 CLOCKSWITCH 启用/禁用外部时钟
该指令开启/关闭外部时钟。时钟源一旦改变,系统自动重启。
该指令的使用需接收机的硬件支持,对于 UB280 等不支持外钟的板卡、接收机无效。
简化ASCII语法
CLOCKSWITCH switch
输入示例: CLOCKSWITCH disable
ID 字段 ASCII 值 描述
1 CLOCKSWITCH
Header
-
2 switch enable 启用 外部时钟
disable 禁用 外部时钟 (默认)
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.6 COM 串口控制
该指令可以为物理串口配置数据通信参数。不推荐对同一端口使用不同的控制源,特别是当端
口处于使用状态或与外围设备相连时。
该指令暂不支持二进制格式。
简化ASCII语法
COM port bps
输入示例:COM COM2 115200
ID 字段 ASCII 值 描述
1 COM
header
-
2 port 参考 表 3 端口定义 要配置的端口号。
3 bps/baud 每个端口所支持的波特率是不同
的,请参考表 4 串口波特率
通讯波特率 (bps),默认设置为
115200。
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。

用户指令手册
- 4 -
表 3 端口定义
ASCII 描述
COM1 COM 端口 1
COM2 COM 端口 2
COM3 COM 端口 3
表 4 串口波特率
ASCII 描述
COM1 9600, 19200, 38400, 57600, 115200, 230400,460800
COM2 9600, 19200, 38400, 57600, 115200, 230400
COM3 9600, 19200, 38400, 57600, 115200, 230400
1.7 DATASERVERCONFIG 配置数据服务器
此命令用于配置存储观测文件的网络服务器。此服务器遵循 FTP 协议。
简化ASCII语法
DATASERVERCONFIG IPAddress username password uploadDirectory
输入示例: DATASERVERCONFIG FTP 192.168.10.10 root unicore /test/
ID 字段 ASCII 值 描述
1 DATASERVERCONFIG
header
-
2 IPAddress
数据存储服务器的 IP 地址
3 username
访问数据存储服务器的用户名
4 password
访问数据存储服务器的密码
5 uploadDirectory
用于上传数据的目录(用户需要先创建这
一目录,目录名仅支持英文)
此命令仅适用于具备网络接口通信能力的板卡。
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。

- 5 -
1.8 ECUTOFF 设置卫星截止高度角
该指令为搜索卫星设置截止高度角。当卫星上升到高于截止高度角位置时,接收机才会自动搜
索卫星。当卫星下降到低于截止高度角位置时接收机不再搜索卫星,除非进行重新配置。
简化 ASCII 语法
ECUTOFF system angle
输入示例: ECUTOFF GPS 10.0
ID 字段 ASCII 值 描述
1 ECUTOFF header
-
2 system 参考表 1 系统类型 需设定截止高度角的卫星系统
3 angle ±90.0 degrees 相对水平面的截止高度角(默认值=
5)
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.9 FIX 设置基准站坐标
该指令用于设置基准站接收机的位置。
简化 ASCII 语法
FIX[type][param1][param2][param3]
输入示例: FIX POSITION 40.36136389 116.254891356 100.253
ID 字段 ASCII 值 描述
1 FIX header
- Message ID. (MSG ID = 7)
2 type 参考 表 5 配置类型 类型
3 param1 参考表 6 FIX 参数 参数 1
4 param2 参数 2
5 param3 参数 3
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
表 5 配置类型
ASCII 名称 描述
NONE 取消固定。清除先前的 FIX 指令

用户指令手册
- 6 -
ASCII 名称 描述
POSITION 配置接收机,固定其位置。当有必要生成
差分改正信息时需使用该指令。
表 6 FIX 参数
ASCII 类
型名称
参数 1 参数 2 参数 3
NONE 未使用 未使用 未使用
POSITION 纬度 (-90 到 90 度)
负号代表南向,正号代表北
向
经度(-360 到 360 度)
负号代表西向,正号代表
东向
平均海平面度:-1000
到 20000000 m
强烈建议使用 FIX 指令输入的位置其精度应在几米内。若输入的位置与定位结果偏差大于 1
千米,则该指令无效。
输入的位置数值反映了基准站天线相位中心的准确位置。
输入的高度数值基于平均海平面,与椭球高存在高程异常差值。
当前固件版本位置仅基于 WGS84 基准。
1.10 FRESET 清除 NVM 中选中的数据并重新设置接收机
该指令清除所有储存于非易失性存储器中的用户特定配置和卫星星历、位置信息,恢复出厂设
置。该指令将强制接收机重启。
该指令不会清除由 NETCONFIG 命令设置的参数。
简化ASCII语法
FRESET
ID 字段 ASCII 值
1 FRESET header
-
1.11 HEADING 设置定向工作模式
此命令用于设定接收机打开或关闭定向工作模式。在定向工作模式,接收机将计算相对于移动
基站端(Moving Base)的向量长度、方位和俯仰方位角。
该模式需接收机相应授权支持,且仅适用于对双板卡或接收机的定向工作模式。
简化ASCII语法

- 7 -
HEADING switch
输入示例: HEADINGenable
ID 字段 ASCII 值 描述
1 HEADING
Header
-
2 switch enable 启用 定向模式
disable 禁用 定向模式
当前对于双板卡定向产品,在某一板卡设定为 Heading 模式时,该板卡的位置(单点、
DGPS)、速度信息更新将始终保持在 1Hz 更新状态,且仅作基于载波相位的定向计算,定
向信息的更新频率视板卡的授权和设置。
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.12 HEADINGMODE
此命令用于设定接收机定向工作模式时,移动基站端(Moving Base)与定向端(Heading)的
天线运动状态,以改善天线静止或固定状态时的定向精度。
简化ASCII语法
HEADINGMODE mode
输入示例: HEADINGMODEFIXLENGTH
ID 字段 ASCII 值 描述
1 HEADINGMODE
Header
-
2 Mode STATIC
移动基站和定向端的天线均
在静止状态
FIXLENGTH(缺省)
移动基站和定向端的天线间
距离保持固定(天线运动或
静止)
VARIABLELENGTH 移动基站和定向端的天线相
对位置或距离动态变化
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.13 HEADINGOFFSET 设置航向和俯仰改正值
此命令用于设置航向角和俯仰角的改正值,该改正值将修正接收机输出的 HEADING、GPHDT
信息中的航向角和俯仰角。
简化 ASCII 语法
HEADINGOFFSET headingoffsetindeg [pitchoffsetindeg]

用户指令手册
- 8 -
输入示例:HEADINGOFFSET 16.0
ID 字段 ASCII 值 描述
1 HEADINGOFFSET header
- -
2 Headingoffsetindeg -180.0 - 180.0 航向角改正值
3 Pitchoffsetindeg -90.0 - 90.0 俯仰角改正值
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.14 INTERFACEMODE 设置串口发送/接收模式
此命令允许用户指定接收机特定的端口可传输何种类型的数据。接收的类型指明端口可接受的
数据类型,发送的类型指明端口可输出的数据类型。例如,为了接收 RTCM 差分电文,可以设
定接受的类型为 RTCM。
此命令还可用于打开、禁用特定的端口产生或输出命令响应(目前仅能设定为允许响应)。该功
能对于特定的数据格式要求和额外的字节可能引起问题的应用非常重要,如 RTCM、 RTCMV3
或 CMR。禁用端口提示对于当端口连接有 Modem 或其他设备时也有用,这些设备的响应信息
接收机无法识别。
当 INTERFACEMODE port NONE NONE OFF 被设定时,该端口将禁止任何输入输出信息的编
解码。因此,命令或差分改正都无法被该接口解码。
简化ASCII语法
INTERFACEMODE [port] rxtype txtype [responses]
输入示例: INTERFACEMODE COM2 UNICORE RTCMV3 ON
ID 字段 ASCIIValue 描述
1 INTERFACEMODE header
-
2 port 参考表 3 端口定义 串口标识符(默认值=
当前端口)
3 rxtype 参考表 7 接口模式 接收模式
4 txtype 发送模式
5 responses OFF 关闭响应
*目前尚不支持
ON 打开响应(默认)
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。

- 9 -
表 7 接口模式
ASCII类型名称 描述
NONE 该端口不接受/发出任何信息。该端口被禁用。
UNICORE 该端口仅接受/发出 Unicore 指令与 log。
RTCMV3 该端口仅接受/发出 RTCM 版本 3.0/3.1/3.2 改正信息。
RTCM 该端口仅接受/发出 RTCM 版本 2.3 改正信息。在 RTCM
模式下,不包括北斗改正信息。
CMR 该端口仅接受/发出 CMR 改正信息。在 CMR 模式下,不
包括北斗改正信息。
AUTOMATIC 该端口可接受/发出 UNICORE 和 RTCMV3、RTCM、CMR
差分信息的混合输入。
1.15 LOG 请求接收机输出信息
此命令为不同类型的数据输出触发 log 事件。
简化 ASCII 语法
LOG [port] message [trigger [period [offset [hold]]]]
输入示例: LOG COM1 PSRPOSA ONTIME 1 0 NOHOLD
ID 字段 ASCII 值 描述
1 LOG
Header
-
2 port 参考表 3 端口定义 输出端口
3 message 任何有效的信息 ID,
参考表 8 LOG 信息
Log 输出的 Message ID
4 Message type
任何有效的后缀为 A
或 B 的消息名称
Log 的信息类型
6 trigger 不是每种 log 都支持所有类型的触发器,详见表 9 触发器类型与输
出周期
ONCHANGED 输出当前时刻的信息,并当信息改变时接着
输出。
ONTIME 根据一定的时间间隔输出
ONCE 仅输出当前时刻的信息

用户指令手册
- 10 -
ID 字段 ASCII 值 描述
7 period 高于 1Hz 的输出率有
效值为 0.2 和 0.5,对
于低于 1Hz 的记录,
可以为任何整型数值
Log 周期(对于 ONTIME 触发器)秒数
不同的 log 由不同的更新率支持,详见表 9
触发器类型与输出周期
8 offset 0 相对周期对应时刻的时间偏移量(暂不支持)
9 hold NOHOLD 允许通过 UNLOGALL 指令删除 log
HOLD 防止 log 被默认的 UNLOGALL 指令删除
部分设备状态 Log 信息输出仅支持轮询模式,即只有发送查询命令,才会输出一次最近的
状态信息,这些信息包括:COMCONFIG、ICOMCONFIG、HEADINGOFFSET、LOGLIST、
UCOMCONFIG 和 VERSION。
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
表 8 LOG 信息
DATATYPE MESSAGE ID
描述
BD2EPHEM 1047 北斗星历数据
BD2IONUTC 2010 北斗电离层数据与 UTC 数据
BESTPOS 42 最佳定位信息
BESTVEL 99 最佳速度信息
COMCONFIG 317 当前 COM 端口配置
GLOEPHEMERIS 723 GLONASS 星历数据
GPSEPHEM 7 GPS 星历数据
GPGGA 218 GPS 定位信息与大地水准面差距
GPGSA 221 GPS DOP 与有效卫星
GPGSV 223 GPS 可见卫星
GPHDT 1045 以度为单位的航向
GPZDA 227 UTC 日期与时间
HEADING 971 航向信息
IONUTC 8 GPS 电离层参数与 UTC 数据
LOGLIST 5 Log 列表
PSRDOP 174 伪距 DOP
PSRPOS 47 伪距位置信息

- 11 -
DATATYPE MESSAGE ID
描述
PSRVEL 100 伪距速度信息
RANGE 43 卫星范围信息
RAWEPHEM 41 原始星历
REFSTATION 175 基站位置与健康状况
SATVIS 48 可见卫星信息
TIME 101 时间信息
VERSION 37 接收机硬件与软件版本信息
表 9 触发器类型与输出周期
数据类型 触发类型 LOG 周期(秒)
BESTPOS ONTIME ONCE 0.1~ 0.05, >=1
BESTVEL ONTIME ONCE 0.1~0.05, >=1
BD2EPHEM
ONTIME ONCE ONCHANGED >=1
BD2IONUTC
ONTIME ONCE ONCHANGED >=1
COMCONFIG ONTIME ONCE >=1
GLOEPHEMERIS
ONTIME ONCE ONCHANGED >=1
GPSEPHEM
ONTIME ONCE ONCHANGED >=1
GPGGA ONTIME ONCE 0.1~0.05, >=1
GPGSA ONTIME ONCE 0.1~0.05, >=1
GPGSV ONTIME ONCE 0.1~0.05, >=1
GPHDT ONCE ONCHANGED 0.1~0.05, >=1
GPZDA ONTIME ONCE 0.1~0.05, >=1
HEADING ONCE ONCHANGED 0.1~0.05, >=1
IONUTC
ONTIME ONCE ONCHANGED >=1
MATCHEDPOS
ONCHANGED ONCE --

用户指令手册
- 12 -
数据类型 触发类型 LOG 周期(秒)
LOGLIST ONCE >=1
PSRDOP ONCHANGED ONCE 0.1~0.05, >=1
PSRPOS ONTIME ONCE 0.1~0.05, >=1
PSRVEL ONTIME ONCE 0.1~0.05, >=1
RANGE ONTIME ONCE 0.1~0.05, >=1
RAWEPHEM
ONTIME ONCE ONCHANGED >=1
REFSTATION ONCE ONCHANGED --
RTCM ONTIME ONCE >=1
RTKDATA ONCE ONCHANGED --
RTKDOP ONTIME ONCE 0.1~0.05, >=1
RTKPOS ONTIME ONCE 0.1~0.05, >=1
RTKVEL ONTIME ONCE 0.1~0.05, >=1
SATVIS ONTIME ONCE 0.1~0.05, >=1
TIME ONTIME ONCE 0.1~0.05, >=1
VERSION ONTIME ONCE 0.1~0.05, >=1
参数 log 周期仅对 ONTIME 触发器模式有效。当输出周期小于 1s 时,取值必须是 0.05s 的
整数倍。
1.16 MOVINGBASESTATION 设置移动基站
此命令用于设定接收机打开或关闭移动基站工作模式。在移动基站工作模式,接收机将向
Heading 端发送经过编码的自身位置和观测值信息。
该模式需接收机相应授权支持,对于 UB280 等单板双天线定向板卡,不支持该命令。
简化ASCII语法
MOVINGBASESTATION switch
输入示例: MOVINGBASESTATIONENABLE

- 13 -
ID 字段 ASCII 值 描述
1 MOVINGBASESTATI
ON
Header
-
2 switch enable 启用 移动基站模式
disable 禁用 移动基站模式
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.17 NETCONFIG 设置网络配置
此命令用于置板卡的网络设置。
简化 ASCII 语法
NETCONFIG [autoconf [conf]]
输入示例:NETCONFIG static 192.168.10.227::192.168.10.1:255.255.255.0:UB370:eth0
ID 字段 ASCII 值 描述
1 NETCONFIG header
-
2 Autoconf autoconf
dhcp
static
none
AUTOCONF:自动配置的方法
DHCP: 若使用 DHCP,[conf]参数必须为空
STATIC: [conf] 参数不能为空
NONE: 清除网络配置
3 conf
[conf]:的格式如下:
string =
<client-ip>:<server-ip>:<gw-ip>:<netmask>:<hostn
ame>:<device>
client-ip: 接收机的 IP 地址,缺省为 192.168.0.100
server-ip: DHCP 服务器的 IP 地址
gw-ip:网关的 IP 地址,缺省为 192.168.0.1
netmask: 本地网络接口的网络掩码,缺省为
255.255.255.0
hostname: 接收机板卡主机名。未指定则不会触发自
动配置。
device: 所使用的网络设备名称
此命令仅适用于具备网络接口通信能力的板卡。
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器,并不会
被 FRESET 命令删除。

用户指令手册
- 14 -
1.18 NETPORTCONFIG 配置网络端口
该指令可用于配置接收机网络连接的客户端服务器和 TCP 端口。
简化 ASCII 语法
NETPORTCONFIG [DeviceName][IP] prototype port
输入示例: NETPORTCONFIG TCP 40001
NETPORTCONFIG ICOM1 192.168.10.10 TCP 40001
ID 字段 ASCII 值 描述
1 NETPORTCONFIG Header
-
2 DevName ICOM1/ICOM2/ICOM3
(接收机作为 Client 时,
端口号默认为 ICOM1;
接收机作为 Server 时,
Client 连接后自动生成
从 ICOM4 开始的设备)
板卡的网络通讯设备名称
3 IP/ServerName XXX.XXX.XXX.XXX/String
在客户端模式下,为远程服务器
的 IP 地址或主机名
在服务器模式下,不需要 IP 或主
机名
4 Prototype TCP UDP
网络传输协议
5 Port XXXXXX 网络链接的端口,40000 -
50000。
作为服务器端时,默认端口号为
40000
此命令仅适用于具备网络接口通信能力的板卡。
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器,不会被
FRESET 命令删除。
1.19 NETUPLOAD 设置数据上传参数
简化 ASCII 语法
NETUPLOAD [sample period][upload interval]
输入示例: NETUPLOAD 5 10
ID 字段 ASCII 值 描述
1 NETUPLOAD Header
-
2 Sample period 1 ~ 30 原始测量采样周期秒数(默认值=30)

- 15 -
ID 字段 ASCII 值 描述
3 Upload interval 3 ~ 86400 数据报的上传间隔分钟数(默认值=30)
此命令仅适用于具备网络接口通信和 USB 接口能力的板卡,通过外接的 USB 存储设备保存
VERSIO、BESTPOSB、BESTVELB、RANGEB、GPSEPHEMB、GLOEPHEMERISB、BD2EPHEMB、
IONUTCB、BD2IONUTCB 信息。
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.20 NMEATALKER 设置 NMEA Talker ID
该指令可修改 NMEA talker ID。Talker 是 GPGSA,GPGSV,和 GPZDA log 输出中信息头内
$后的首两个字符。
简化 ASCII 语法
NMEATALKER id
输入示例:NMEATALKER AUTO
ID 字段 ASCII 值 描述
1 NMEA-TALKER header
_
2 ID GP 仅 GPS
AUTO 北斗、GPS、GLONAS 定位,或联合定位
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
表 10NMEA Talkers
Log Talker IDs
GPGGA GN 或 GP
GPGSA GN 或 GP
GPGSV GP 和 BD, 或 GP
GPZDA GN 或 GP
1.21 NTRIPCONFIG 配置 NTRIP
此命令用于建立和配置 NTRIP 通讯。其中 NCOM1/2/3 仅支持 Server 模式;NCOM20 仅支持
Client 模式。

用户指令手册
- 16 -
简化 ASCII 语法
NTRIPCONFIG port type [protocol [endpoint [mountpoint [usernam [password]]]]]
输入示例: NTRIPCONFIGNCOM1 server V1 192.168.10.98:2100 UR360 "" 123456
ID 字段 ASCII 值 描述
1 NTRIPCONFIG Header
-
2 port NCOM1/2/3/20 配置端口
3 type Disable NTRIP 类型
Client
Server
4 protocol V1 (default) NTRIP 协议版本
5 endpoint IP:Port
最长 80 个字符
NTRIP CASTER 主机名或 IP 地址,以及端
口号
6 mountpoint 最长 80 个字符 NTRIP caster 分配的挂载点
7 user 最长 30 个字符 访问 NTRIP caster 的用户名,""表示空字
符串(不需要用户名的情况)
8 password 最长 30 个字符 访问 NTRIP caster 的密码
此命令仅适用于具备网络接口通信能力的板卡。
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.22 PASSWD 配置网络连接的密码
该指令为设置通过网络连接接收机时的密码。错误的密码会导致用户无法通过网络访问接收机。
一旦密码被修改,用户在下一次访问时需要输入新密码。
简化 ASCII 语法
PASSWD usenameoldPasswordnewPassword1newPassword2
输入示例: PASSWD root “unicore” “unicore2” “unicore2”
ID 字段 ASCII 值 描述
1 PASSWD Header
-
2 Usename
用户名,用户名为空则无效,不允许使用“,”或“.”。
长度要求小于 16 个字符。
3 oldPassword
旧密码,长 6~16 个字符,使用“”标明该字段,在
密码串中不允许使用“,”或“”。
如“123456”,“abcdefgh”
4 newPassword1
新密码的格式要求与旧密码相同
5 newPassword2
确认新密码,格式要求与旧密码相同,确保其与新
密码 1 相同。

- 17 -
此命令仅适用于具备网络接口通信能力的板卡。
此命令自动生效,将相关配置保存到非易失性存储器。
1.23 PPSCONFIG 配置 PPS
简化 ASCII 语法
PPSCONFIG Time refswitchpolaritywidthantDelayrfDelayusrDelay
输入示例: PPSCONFIG BD2 enable POSITIVE 100000 0 0 0
ID 字段 ASCII 值 描述
1 PPSCONFIG header -
2 Time ref 参考
表 1 系统类型
当前仅支持 BD2 和 GPS
3 switch DISABLE
关闭 PPS 输出(一旦该字段被设为 disble,
接收机关闭 PPS 输出,所有其他参数被忽
略)。
ENABLE 打开 PPS 输出
4 polarity POSITIVE
PPS 上升沿有效
NEGATIVE PPS 下降沿有效
5 Width 脉冲宽度应小于周期
PPS 脉冲宽度(us)
6 Period 取值为:
50,100,200,250,500,
1000,2000,3000…,
20000
脉冲输出的周期(ms)
7 RF Delay -32768~32767 间的整数 RF 延迟(ns)
8 User Delay -32768~32767 间的整数 用户设置延迟(ns)
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.24 RTKCOMMAND 将 RTK 解算重启或配置为默认值
该指令可重置 RTK 引擎并清除 RTK 参数。

用户指令手册
- 18 -
对于单板双天线产品而言,该命令对移动基站端(Movingbase)和定向端(Heading)同时
生效。
简化 ASCII 语法
RTKCOMMAND action
ASCII 示例:
rtkcommand reset
ID 字段 ASCII 值 描述
1 RTKCOMMAND header
-
2 type USE_DEFAULTS 重置为默认
RESET 重置 RTK 解算
1.25 RTKDYNAMICS 设置 RTK 动态模式
该指令可指定接收机处理观测数据的方式,包括三种:静态,动态和自动。静态模式强制 RTK
解算时认为流动站处于静止状态,无视运动检测器的输出。
动态模式强制 RTK 解算时认为接收机处于运动状态。若接收机运动非常缓慢(以小于 2.5 cm/s
的速度移动 5 秒以上),应使用动态模式(相对于自动模式)来防止结果不准确和可能发生的复
位。
在启动时,接收机默设置为动态模式。
对于单板双天线产品而言,该命令对移动基站端(Movingbase)和定向端(Heading)同时
生效。
简化 ASCII 语法
RTKDYNAMICS mode
ASCII 示例:
RTK DYNAMICS STATIC
ID 字段 ASCII 值 描述
1 RTKDYNAMICS header
-
2 mode 参考表 11 动
态模式
设置动态模式
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。

- 19 -
表 11 动态模式
ASCII 描述
AUTO 自动模式
STATIC 静态模式
DYNAMIC 动态模式(缺省设置)
1.26 RTKTIMEOUT 设置 RTK 数据最大龄期
该指令用于设置流动站所能接受的 RTK 数据的最大龄期。接收到的滞后于指定龄期的 RTK 数据
被忽略。
简化 ASCII 语法
RTKTIMEOUT delay
Factory Default:
rtktimeout100
ASCII 示例 (流动站):
rtktimeout 20
ID 字段 ASCII 值 描述
1 RTKTIMEOUT header
-
2 delay 2-100s 数据最大龄期(默认值= 100 s)
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.27 SAVECONFIG 将当前配置保存到非易失性存储器(NVM)
该指令将当前的用户配置保存到非易失性存储器(NVM)中,包括 LOG(应仅输出一次并且没
有触发事件的 log 除外),端口配置等。
该指令发送后,为确保所有设置信息被正确保存,建议在 500ms 后再执行其他操作。
简化 ASCII 语法
SAVECONFIG
ID 字段 ASCII Value 描述
1 SAVECONFIG header

用户指令手册
- 20 -
1.28 SYSCONTROL 控制跟踪卫星的系统
该命令用于控制跟踪的卫星系统。
简化 ASCII 语法
SYSCONTROL switch system
输入示例: SYSCONTROL disable BD2
ID 字段 ASCII 值 描述
1 SYSCONTROL header
--
2 switch disable 禁用指定的系统
enable 启用被禁用的指定系统; 重置活动系
统并重启以定位。
3 System 参考
表 1 系统类型
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.29 UNDULATION 选择水准面模型
用户可以通过该命令输入特定的大地水准面差距或使用内置大地水准面差距格网值。在该选项
字段中,EGM96 表提供 0.25° X 0.25°格网的椭球高度,而 OSU89B 采用 2° X 3°的格网。在大
地水准面起伏剧烈的地方,使用 2° X 3° 的格网有可能在某一区域内得到错误的高度。
EGM96 提供了一个更精确的大地水准面模型,其格网更密。从 OSU89B 到 EGM96,格网点
的大地水准面差距本身更精确,因而模型精度也得以高。例如,默认格网(EGM96)在海底峡
谷,陡坡或山区中十分有效。
在 BESTPOS,MATCHEDPOS,PSRPOS 和 RTKPOS log 中报告的大地水准面差距与椭球选
择的基准相关。
简化 ASCII 语法 Message ID: 214
UNDULATION option [separation]
Factory Default:
undulation egm96
ASCII 示例 1:
undulation osu89b
ASCII 示例 2:
undulation user -5.599999905

- 21 -
ID 字段 ASCII 值 描述
1 UNDULATION header --
2 option TABLE 使用内置格网表(与 EGM96 相同)
USER 使用用户指定的大地水准面差距值
OSU89B 使用 OSU89B 模型格网
EGM96 使用 EGM96 模型格网(默认)
3 separation ± 1000.0m 大地水准面差距值(USER 选项要
求)
当连续使用 UNDULATION 和 FIX 时,应首先配置 UNDULATION。
此命令自动生效,可通过 SAVECONFIG 命令将相关配置保存到非易失性存储器。
1.30 UNLOG 停止特定 log 输出
该指令停止输出特定的 log。可配置参数[端口],若无指定端口,一般认为端口接受该默认指令。
简化 ASCII 语法
UNLOG [port] datatypet
输入示例: UNLOG COM1 RANGEA
ID 字段 ASCII 值 描述
1 UNLOG header
--
2 port 参考表 12端口标识符
(大于 16 的十进制数可
用)
log 正在发往的端口(默认值=当前
端口)
3 message 消息名 禁用 log 的信息名称
1.31 UNLOGALL 停止输出所有 log
该指令删除指定端口的所有 log,并且不改变其他端口的 log 配置。若没有指定端口,将使用
CURRENT_PORT,该指令对其有效。
简化 ASCII 语法
UNLOGALL [port]

用户指令手册
- 22 -
输入示例: UNLOGALL COM2 TRUE
ID 字段 ASCII 值 描述
1 UNLOGALL header --
2 port 参考表 12端
口标识符
要删除的端口(默认值=当前端口)
3 Held FALSE 不删除带有 HOLD 参数的 log(默认)
TRUE 删除先前的 log,包括带有 HOLD 参数的
log
表 12 端口标识符
ASCII Port Name
描述
COM1 COM 端口 1
COM2 COM 端口 2
COM3 COM 端口 3
ICOM1 IP 虚拟 COM 端口
ICOM2 IP 虚拟 COM 端口
ICOM3 IP 虚拟 COM 端口

- 23 -
2. Log 参考
2.1 LOG 头格式
2.1.1 二进制格式
二进制信息是一种有严格约定的机器可读格式,适合用于包含大量数据传输的应用。由于固有
的压缩格式,二进制信息与 ASCII 相比数据量要小得多,因此接收机的通讯端口能够发送或接
收更多的数据。我们将二进制格式定义如下:
1. 基本格式:
Header(头) 3个同步字节加上25个头信息字节。头的长度可变,因为将来可能会追加
字段。请务必检查头的长度。
Data(数据)变量
CRC (校验)4个字节
2. 3个同步字节永远为:
Byte Hex Decimal
First AA 170
Second 44 68
Third 12 18
3. 该CRC是一个应用于所有数据,包括头的32字节的CRC。
4. Header(头)格式详见表 13 二进制信息Header(头)结构。
表 13 二进制信息 Header(头)结构
ID 字段 类型 描述 字节数 字 节
偏移
可 选 输
入字段
1 Sync Char 十六进制 0xAA. 1 0 N
2 Sync Char 十六进制 0x44. 1 1 N
3 Sync Char 十六进制 0x12. 1 2 N
4 Header
Length
Uchar 头长度 0x1C 1 3 N
5 Message
ID
Ushort Log的信息ID,参考表 8 LOG信息 2 4 N
6 Message
Type
Char 00 =二进制
01 = ASCII
10 = 简化ASCII
1 6 N
7 Port Uchar 当前不支持 1 7 N

用户指令手册
- 24 -
ID 字段 类型 描述 字节数 字 节
偏移
可 选 输
入字段
Address
8 Message
Length
Ushort 信息长度(字节),不包括Log头和
CRC比特。
2 8 N
9 Reserved Ushort 保留 2 10 N
10 Idle Time Uchar 最近一秒中两个具有相同信息ID的
log之间的处理器空闲时间。
空闲时间取值(0~200),除以2可
得到空闲百分比(0~100%)
1 12 Y
11 Time
Status
Enum GPS 时间质量。当前取值20或
160,前者表明接收机还未能计算出
准确的GPS时间。
1 13 N
12 Week Ushort GPS 周数 2 14 N
13 ms Ulong 以ms为单位的GPS周内秒 4 16 N
14 Reserved Ulong
4 20 Y
15 BD2 time
offset to
GPS
Second
Ushort 北斗与GPS时系差。
该字段存储一周内GPS秒与北斗秒
的差异。一个接收机成功跟踪了
GPS卫星和BD2卫星。该字段用于
计算北斗卫星的坐标。
北斗秒= GPS秒– 时系差
2 24 Y
16 Reserved Ushort
2 26 Y
表 14 支持的端口标识
ASCII 接口名称 描述
COM1 COM 端口 1
COM2 COM 端口 2
COM3 COM 端口 3

- 25 -
ASCII 接口名称 描述
ICOM1 TCP/IP 或 UDP 虚拟 COM 端口
ICOM2 TCP/IP 或 UDP 虚拟 COM 端口
ICOM3 TCP/IP 或 UDP 虚拟 COM 端口
ICOM4 TCP/IP 或 UDP 虚拟 COM 端口
…… ……
ICOM10 TCP/IP 或 UDP 虚拟 COM 端口
NCOM1 NTRIP Sever 端口(网络连接)
NCOM2 NTRIP Sever 端口(网络连接)
NCOM3 NTRIP Sever 端口(网络连接)
…… ……
NCOM10 NTRIP Sever 端口(网络连接)
NCOM20 NTRIP Client 端口(网络连接)
2.1.2 ASCII 格式
用户和计算机可直接查看 ASCII 信息,所有 ASCII 信息都遵循下面的一般约定:
1. 每条信息前导符为“#”;
2. 每条log信息或命令的可变长度依赖于数据量和格式;
3. 所有数据字段以“,”分隔,但有两种例外情形:
第一种情况是,最后一个Header(头)字段后是“;”,表明数据信息的开始;
第二种情况是,最后一个数据字段后是“*”,表明数据信息的结束。
4. 每条log信息结尾都有一个以“*”开始的十六进制数字和用来表示该行结束的换行回车符,
例如:*1234ABCD[CR][LF]。十六进制数字是该条log信息所有字符的32位CRC校验和,但不
包括“#”标识符和“*”及其之后的8位CRC数字。
5. 一个ASCII字符串是一个字段,该字符串以双引号所引用,例如“ASCII string”。如果一个分
隔符被双引号所应用,那么该字符串仍然是一个字段,且该分隔符将被忽略(例如,“xxx,xxx”)。
在字符串中出现双引号将为非法。
6. 如果接收机探测到一个错误的输入信息,将返回一个出错信息。
ASCII 信息的结构:
header;data field...,data field...,data field...*xxxxxxxx[CR][LF]
ASCII 信息 Header(头)结构的描述见表 15

用户指令手册
- 26 -
表 15 ASCII 信息 Header(头)结构
ID 字段 类型 描述 可选输入字段
1 Sync Char 同步字符,ASCII 信息始终以一个“#”字符开始 N
2 Message Char 本手册中 log 或命令的 ASCII 名称,参考表 8 LOG
信息
N
3 Port Char 产生 log 信息的接口名称。字符串由接口名称加以 x
的后缀组成,x 是 1-31 的数字,则用来表示虚拟接
口。若未指示虚拟接口,则假定虚拟接口为 0。
Y
4 Sequence # Long 用于多条 log 输出。这是一个从 N-1 到 0 的递减数字,
0 意味着最后 1 条。多数 log 信息同一时间只有 1 条,
这种情况该值为 0。
N
5 % Idle Time Float 处理器空闲时间的最小百分比,每秒计算 1 次。 Y
6 Time Status Enum GPS 时间质量。当前取值 Unknown 或 Fine,前者
表明接收机还未能计算出准确的 GPS 时间。
Y
7 Week Ulong GPS 周数 Y
8 Seconds GPSec GPS 周内秒,精确到 ms。 Y
9 Receiver Status
Ulong 8 位十六进制的数字,用来表示各种硬件和软件部分
的状态。
Y
10 BD2 time offset to GPS Second
Char 北斗与GPS时系差,字符串代表十六进制数字。
该字段存储一周内GPS秒与北斗秒的差异。一个接收
机成功跟踪了GPS卫星和BD2卫星。该字段用于计算
北斗卫星的坐标。
北斗秒= GPS 秒– 时系差
Y
11 Receiver s/w Version
Ulong 0 – 65535 的值用来表示接收机固件的创建号。 Y
12 ; Char 该字符表示 Header(头)结束 N
2.2 BD2EPHEM 北斗星历数据
此命令记录北斗星历数据。用户可发送 Log BD2EPHEM 命令来触发该 log 事件。
Message ID: 1047
推荐输入:
LOG BD2EPHEMA ONCHANGED
LOG消息输出
#BD2EPHEMA,COM1,0,98.0,SATTIME,1740,98268.000,00000000,e,0;161,98220.0,0,1,1,1740,1740,972

- 27 -
00.0,4.216333630e+07,1.415058943e-09,-2.444945135e+00,1.8965790514e-04,2.0674088174e+00,1.8300
48859e-07,2.378597856e-05,-7.33328125e+02,4.21875000e+00,-5.168840289e-08,6.658956409e-08,9.04
76453690e-02,7.046722096e-10,-2.658439412e+00,-3.11798702e-10,0,97200.0,1.420000000e-08,-1.0400
00000e-08,9.92621e-05,1.79750e-11,0.00000,TRUE,7.292473550e-05,4.00000000e+00*3f0be421
#BD2EPHEMA,COM1,0,98.0,SATTIME,1740,98268.000,00000000,e,0;162,98220.0,0,1,1,1740,1740,972
00.0,4.216442056e+07,4.982707550e-09,-1.014140944e+00,2.8654525522e-04,-7.2526837701e-01,1.237
168908e-05,1.663621515e-05,-5.08703125e+02,3.75093750e+02,2.440065145e-07,5.774199963e-08,6.19
46736490e-02,6.575273887e-10,-2.342245458e+00,-3.91337729e-09,0,97200.0,6.000000000e-09,-1.3600
00000e-08,-5.07863e-05,-3.09130e-11,0.00000,TRUE,7.292549031e-05,4.00000000e+00*1c6a23cc
#BD2EPHEMA,COM1,0,98.0,SATTIME,1740,98268.000,00000000,e,0;163,98220.0,0,1,1,1740,1740,972
00.0,4.216663202e+07,2.412957652e-09,8.894587682e-01,2.1753541660e-04,-1.8602859104e+00,1.6926
78779e-06,2.207048237e-05,-6.75625000e+02,4.59062500e+01,-7.264316082e-08,1.741573215e-07,9.74
10771698e-02,7.250302004e-10,-2.581511624e+00,-1.43434546e-09,0,97200.0,5.700000000e-09,-8.0000
00000e-09,-5.69606e-05,6.21458e-12,0.00000,TRUE,7.291718409e-05,4.00000000e+00*d9026d53
#BD2EPHEMA,COM1,0,98.0,SATTIME,1740,98268.000,00000000,e,0;164,98220.0,0,1,1,1740,1740,972
00.0,4.216410667e+07,3.262278744e-09,-1.614571753e+00,3.0810583849e-04,1.3766613382e+00,1.0591
46598e-05,2.165883780e-05,-6.69796875e+02,3.25781250e+02,9.778887033e-09,1.029111445e-07,8.946
6327775e-02,7.468168222e-10,-2.448687759e+00,-2.11151652e-09,0,97200.0,5.700000000e-09,-7.60000
0000e-09,-2.00751e-04,8.17124e-12,0.00000,TRUE,7.292458416e-05,4.00000000e+00*66bdf0ff
ID 字段 数据描述 类型 字节数 字节偏
移
1 BD2EPHEM header
Log 头
H 0
2 PRN 卫星 PRN 编号(BD2 161 到 197) Ulong 4 H
3 Tow 子帧 1 的时间标识(秒) Double 8 H+4
4 Health 健康状态–在北斗 ICD 中定义的一个 1
比特的健康代码
Ulong 4 H+12
5 AODE 星历数据龄期 Ulong 4 H+16
6 AODE 星历数据龄期(同字段 5) Ulong 4 H+20
7 Week 基于 GPS 时间的整周计数(GPS 周) Ulong 4 H+24
8 Z Week 基于 GPS 时间的 Z 计数周数,为星历子
帧 1 的周数。“TOE 周”(字段#7)来源
于此,用来说明滚转。
Ulong 4 H+28
9 Toe 星历参考时刻,秒 Double 8 H+32
10 A 轨道长半轴,米 Double 8 H+40
11 ΔN 卫星平均角速度的改正值,弧度/秒 Double 8 H+48
12 M0 参考时间的平近点角,弧度 Double 8 H+56
13 Ecc 偏心率 Double 8 H+64
14 ω 近地点幅角,弧度 Double 8 H+72

用户指令手册
- 28 -
ID 字段 数据描述 类型 字节数 字节偏
移
15 Cuc 纬度幅角(余弦振幅,弧度) Double 8 H+80
16 Cus 纬度幅角(正弦振幅,弧度) Double 8 H+88
17 crc 轨道半径(余弦振幅,米) Double 8 H+96
18 crs 轨道半径(正弦振幅,米) Double 8 H+104
19 cic 倾角(余弦振幅,弧度) Double 8 H+112
20 cis 倾角(正弦振幅,弧度) Double 8 H+120
21 I0 参考时时刻轨道倾角,弧度 Double 8 H+128
22 IDOT 轨道倾角变化率,弧度/秒 Double 8 H+136
23 Ω0 升交点赤经,弧度 Double 8 H+144
24 Ω dot 升交点赤经变化率,弧度/秒 Double 8 H+152
25 AODC 时钟数据龄期 Ulong 4 H+160
26 toc 卫星钟差参考时间,秒 Double 8 H+164
27 tgd1 B1 群延迟(B1 星上设备时延差),秒 Double 8 H+172
28 tgd2 B2 群延迟(B2 星上设备时延差),秒 Double 8 H+180
29 af0 卫星钟差参数,秒(s) Double 8 H+188
30 af1 卫星钟速参数,(s/s) Double 8 H+196
31 af2 卫星钟漂参数,(s/s/s) Double 8 H+204
32 AS 反欺骗:
0 = FALSE 1 = TRUE
Enum 4 H+212
33 N 改正平均角速度,弧度/秒 Double 8 H+216
34 URA 用户距离精度,m2。ICD 中给出了一种算
法将原始星历中传输的 URAI 指数转化为
名义标准差值。我们输出这一名义值的平
方(方差)。
Double 8 H+224
35 xxxx 32 位 CRC 校验 (仅 ASCII 和二进制) Hex 4 H+232
36 [CR][LF] 语句结束符(仅 ASCII) - - -

- 29 -
2.3 BD2IONUTC 北斗电离层参数及 UTC 数据
提供电离层模型参数(ION)及协调世界时参数(UTC)。
Message ID: 2010
推荐输入:
LOG BD2IONUTCA ONCE
LOG消息输出
#BD2IONUTCA,COM1,0,49.0,SATTIME,1640,352805.000,00000000,e,0;1.024454832077026e-08,2.011
656761169434e-07,-1.668930053710938e-06,3.099441528320312e-06,1.474560000000000e+05,-9.83040
0000000000e+05,7.667712000000000e+06,-6.684672000000000e+06,0,0,0.000000000000000e+00,0.000
000000000000e+00,0,0,0,0,0*aef91616
ID 类型 数据描述 类型 字节数 字节偏
移
1 BD2IONUTC header
Log头 H 0
2 a0 Alpha 参数常数项 Double 8 H
3 a1 Alpha 参数的 1 阶项 Double 8 H+8
4 a2 Alpha 参数的 2 阶项 Double 8 H+16
5 a3 Alpha 参数的 3 阶项 Double 8 H+24
6 b0 Beta 参数的常数项 Double 8 H+32
7 b1 Beta 参数的 1 阶项 Double 8 H+40
8 b2 Beta 参数的 2 阶项 Double 8 H+48
9 b3 Beta 参数的 3 阶项 Double 8 H+56
10 utc wn UTC 参考周数 Ulong 4 H+64
11 tot UTC 参数的参考时间 Ulong 4 H+68
12 A0 BDT 相对于 UTC 的钟差 Double 8 H+72
13 A1 BDT 相对于 UTC 的钟速 Double 8 H+80
14 wn lsf 新的闰秒生效的周计数 Ulong 4 H+88
15 dn 新的闰秒生效的周内日计数(范围
为1到7,周日=1,周六=7)
Ulong 4 H+92
16 deltat ls 新的闰秒生效前BDT相对于UTC
的累积闰秒改正数
Long 4 H+96
17 deltat lsf 新的闰秒生效后BDT相对于UTC
的累积闰秒改正数
Long 4 H+100
18 deltat utc BDT相对于UTC时间差 Ulong 4 H+104
19 xxxx 32位CRC校验 (仅ASCII和二进
制)
Hex 4 H+108
20 [CR][LF] 语句结束符(仅ASCII) - - -

用户指令手册
- 30 -
2.4 BESTPOS 最佳位置
该log包含接收机计算出的最佳可用的GPS和惯性导航系统(INS,若可用)位置(米)。此外,
接收机还报告了几个状态指示符,其中包括差分龄期,差分龄期对预测由差分改正中断造成的
异常非常有用。若龄期为0,则表示未使用差分改正。
Message ID: 42
推荐输入:
LOG BESTPOSA ONTIME 1
LOG消息输出
#BESTPOSA,COM1,0,83.5,FINESTEERING,1419,336148.000,00000040,6145,2724;SOL_COMPUTED,
SINGLE,51.11636418888,-114.03832502118,1064.9520,-16.2712,WGS84,1.6961,1.3636,3.6449,"",0.000,
0.000,8,8,8,8,0,0,0,06,0,03*6F63A93D
ID 字段 数据描述 类型 字节数 字节偏移
1 BESTPOS header
Log 头
H 0
2 sol status 解状态(参考表 21 解的状态) Enum 4 H
3 pos type 位置类型(参考表 20 位置或速度类型) Enum 4 H+4
4 lat 纬度 Double
8 H+8
5 lon 经度 Double
8 H+16
6 hgt 海拔高 Double
8 H+24
7 undulation 大地水准面差距- 大地水准面和 WGS84
椭球面之间的距离(米)
Float 4 H+32
8 datum id# 坐标系 ID 号,当前仅支持 WGS84,ID:
WE
Enum 4 H+36
9 lat σ 纬度标准差 Float 4 H+40
10 lon σ 经度标准差 Float 4 H+44
11 hgt σ 高度标准差 Float 4 H+48
12 stn id 基站 ID Char[4]
4 H+52
13 diff_age 差分龄期,秒 Float 4 H+56
14 sol_age 解的龄期,秒 Float 4 H+60
15 #SVs 跟踪的卫星数 Uchar 1 H+64
16 #solnSVs 在解中使用的卫星数 Uchar 1 H+65
17 Reserved
Uchar 1 H+66
18 Uchar 1 H+67

- 31 -
ID 字段 数据描述 类型 字节数 字节偏移
19 Uchar 1 H+68
20 Hex 1 H+69
21 Hex 1 H+70
22 sig mask 信号掩码(参考表 22 信号掩码) Hex 1 H+71
23 xxxx 32 位 CRC 校验 (仅 ASCII 和二进制) Hex 4 H+72
24 [CR][LF] 语句结束符(仅 ASCII) - - -
2.5 BESTVEL 最佳可用速度
该 log 包含接收机计算出的最佳可用速度信息。此外,接收机还报告了速度状态指示符,对指
示相应的数据是否有效非常有用。该速度测量有时会带来相关的延迟。
Message ID: 99
推荐输入:
LOG BESTVELA ONTIME 1
LOG消息输出
#BESTVELA,COM1,0,61.0,FINESTEERING,1337,334167.000,00000000,827B,1984;SOL_COMPUTED
,PSRDIFF,0250,4.000,0.0206,227.712486,0.0493,0.0*0E68BF05
ID 字段 数据描述 类型 字节数 字节偏
移
1 BESTVEL header
Log头
H 0
2 sol status 解的状态,参考表 21 解的状态 Enum 4 H
3 vel type 速度类型,参考表 20 位置或速度类型 Enum 4 H+4
4 latency 根据速度时标计算的延迟值,以秒为单位。
用历元时间减去延迟可得到更准确的速度
结果。
Float 4 H+8
5 age 差分龄期,以秒为单位 Float 4 H+12
6 hor spd 对地水平速度,米/秒 Double 8 H+16
7 trk gnd 相对于真北的实际对地运动方向(相对地
面轨迹),度
Double 8 H+24
8 vert spd 垂直速度,米/秒,正值表示高度增加(向
上),负值表示高度下降(向下)
Double 8 H+32
9 Reserved Float 4 H+40
10 xxxx 32位CRC校验 (仅ASCII和二进制) Hex 4 H+44
11 [CR][LF] 语句结束符(仅ASCII) - - -

用户指令手册
- 32 -
2.6 BINEX BINEX 数据流
BINEX 是美国 UNAVCO 组织牵头制定的二进制“RINEX”格式,主要用于连续运行参考站、
地基增强系统的 GNSS 接收机实时观测数据流传输,具体格式定义可参考 UNAVCO 官方网站
中的说明(http://http://binex.unavco.org/binex.html)。
当前,和芯星通接收机仅支持 BINEX 中的 BDS、GPS 和 GLONASS 星历输出,以及原始观测
值输出。具体是:
RECORD ID 0x01 中 SUBRECORD 0x01、0x02 和 0x05(GPS、GLONASS 和 BDS 的星历)
RECORD ID 0x7f 中 SUBRECORD 0x05(原始观测值)
推荐输入:
LOG BINEX7F05 ONTIME 1
LOG BINEX0101 ONCHANGED
LOG BINEX0102 ONCHANGED
LOG BINEX0105 ONCHANGED
2.7 CMR CRM 差分电文
紧凑型测量记录(CMR)格式是用于实时动态(RTK)系统的标准通讯协议,用以传输从一个
基站到另一个或多个移动站的 GPS 载波相位和码伪距观测值。
CMROBS GPS观测值
CMRBD2OBSBDS观测值(和芯星通自定义)
CMRGLOOBS GLONASS观测值
CMRREF基准站坐标
CMRDESC基准站描述信息
2.8 COMCONFIG COM 口当前配置
该 log 信息用于输出接收机每一个端口的当前配置。
Message ID: 317
推荐输入:
LOG COMCONFIGA ONCE
LOG消息输出
#COMCONFIGA,COM1,0,6.0,FINE,1690,96471.000,00000000,e,0;2,COM1,115200,N,8,1,N,OFF,ON,U
NICORE,UNICORE,ON,COM2,115200,N,8,1,N,OFF,ON,RTCMV3,NONE,ON*ff47057d

- 33 -
二进制(当前版本暂不支持二进制输出):
ID 字段 数据描述 类型 字节数 字节偏移
1 COMCONFIG header
Log头
H 0
2 #port 带有信息的端口数 Long 4 H
3 port 串口标识符,参考表 3端口定义 Enum 4 H+4
4 baud 通讯波特率 Ulong 4 H+8
5 parity 参考表 16 奇偶校验位 Enum 4 H+12
6 databits 数据位个数 Ulong 4 H+16
7 stopbits 停止位个数 Ulong 4 H+20
8 handshake 参考
表 17握手信号
Enum 4 H+24
9 echo 当echo开启时,端口按照原样传输
输入的字符。0 = OFF ,1 = ON
Enum 4 H+28
10 breaks Breaks开启或关闭 0 = OFF ,1 =
ON
Enum 4 H+32
11 rx type 接收模式的状态,参考
表18接口模式。
Enum 4 H+36
12 tx type 发送模式的状态,参考
表18接口模式 Enum 4 H+40
13 response 响应开启或关闭 0 = OFF, 1 = ON
*目前仅支持开启
Enum 4 H+44
14 next port offset = H + 4 + (#port x 44)
15 xxxx 32位CRC校验 (仅ASCII和二进制) Hex 4 H+4+(#port x44)
16 [CR][LF] 语句结束符(仅ASCII) - - -
表 16 奇偶校验位
二进制 ASCII 描述
0 N 无奇偶校验位(默认)
1 E 偶校验
2 O 奇校验

用户指令手册
- 34 -
表 17 握手信号
二进制 ASCII 描述
0 N 无握手信号(默认)
1 XON XON/XOFF 软件握手信号
2 CTS CTS/RTS 硬件握手信号
表 18 接口模式
二进制 ASCII 描述
0 NONE 该端口不接受/生产任何信息(端口禁用)
1 UNICORE 该端口接受/生成UNICORE指令和log
2 RTCM 该端口接受/生成RTCM v2.3改正信息
4 CMR 该端口接受/生成CMR改正信息
14 RTCMV3 该端口接受/生成RTCM v3.0 改正信息
2.9 GLOEPHEMERIS GLONASS 星历数据
GLONASS星历表参考PZ90.02大地基准。定位时不调整GPS和GLONASS参考帧。
Message ID: 723
推荐输入:
LOG GLOEPHEMERISA ONCHANGED
LOG消息输出
#GLOEPHEMERISA,COM1,3,49.0,SATTIME,1364,413624.000,00000000,6b64,2310;43,8,1,0,1364,413114000,10786,792,0,0,87,0,9.0260864257812500e+06,-6.1145468750000000e+06,2.2926090820312500e+07,1.4208841323852539e+03,2.8421249389648438e+03,1.9398689270019531e+02,0.00000000000000000,-2.79396772384643555e-06,-2.79396772384643555e-06,2.12404876947402954e-04,-1.396983862e-08,-3.63797880709171295e-12,78810,3,15,0,12*a02ce18b #GLOEPHEMERISA,COM1,2,49.0,SATTIME,1364,413626.000,00000000,6b64,2310;44,11,1,0,1364,413116000,10784,792,0,0,87,13,-1.2882617187500000e+06,-1.9318657714843750e+07,1.6598909179687500e+07,9.5813846588134766e+02,2.0675134658813477e+03,2.4769935607910156e+03,2.79396772384643555e-06,-3.72529029846191406e-06,-1.86264514923095703e-06,6.48368149995803833e-05,-4.656612873e-09,3.63797880709171295e-12,78810,3,15,3,28*e2d5ef15 #GLOEPHEMERISA,COM1,1,49.0,SATTIME,1364,413624.000,00000000,6b64,2310;45,13,0,0,1364,413114000,10786,0,0,0,87,0,-1.1672664062500000e+07,-2.2678505371093750e+07,4.8702343750000000e+05,-1.1733341217041016e+02,1.3844585418701172e+02,3.5714883804321289e+03,2.79396772384643555e-06,-2.79396772384643555e-06,0.00000000000000000,-4.53162938356399536e-05,5.587935448e-09,-2.36468622460961342e-11,78810,0,0,0,8*c15abfeb #GLOEPHEMERISA,COM1,0,49.0,SATTIME,1364,413624.000,00000000,6b64,2310;59,17,0,0,1364,413114000,10786,0,0,0,87,0,-2.3824853515625000e+05,-1.6590188964843750e+07,1.9363733398437500e+07,1.3517074584960938e+03,-2.2859592437744141e+03,-1.9414072036743164e+03,1.86264514923095703e-06,-3.72529029846191406e-06,-1.8626451

- 35 -
4923095703e-06,7.92574137449264526e-05,4.656612873e-09,2.72848410531878471e-12,78810,0,0,0,12*ed7675f5
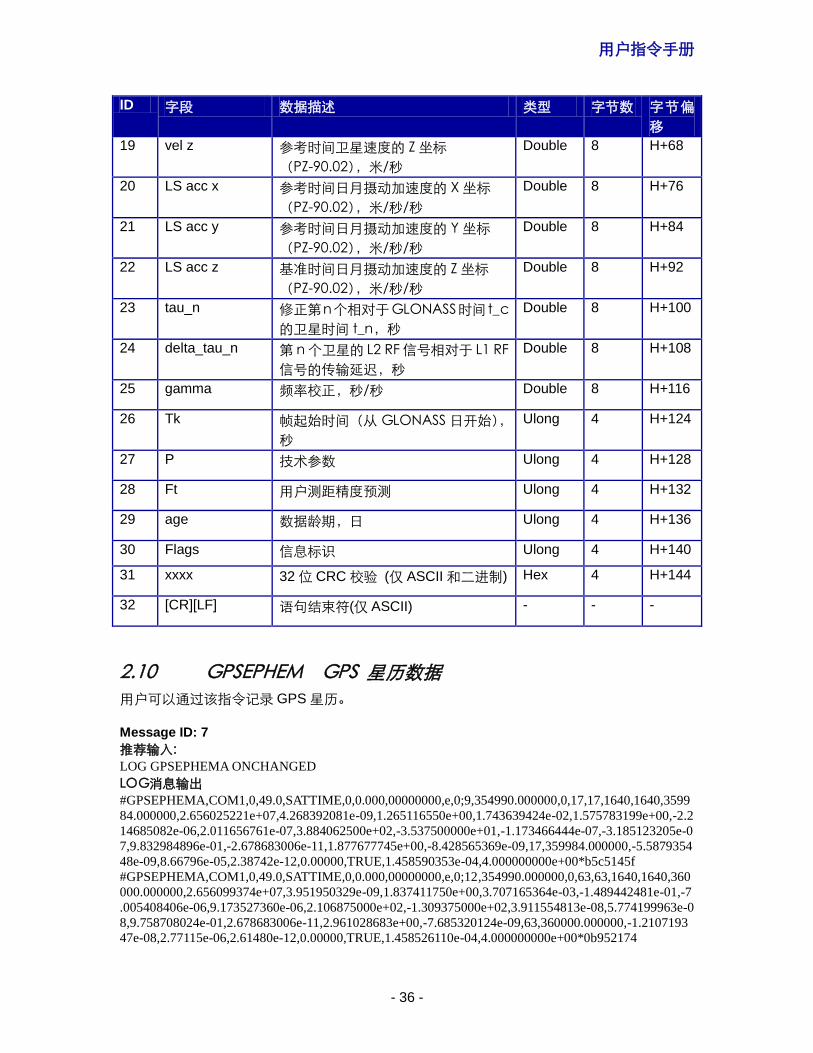
ID 字段 数据描述 类型 字节数 字节偏
移
1 GLOEPHEMERIS header
Log 头
H 0
2 sloto 轨槽编号改正,转换为 PRN 号
(Slot + 37)
Ushort 2 H
3 freqo 频率编号改正,范围为 0 到 20
Ushort 2 H+2
4 sat type 卫星类型
0 = GLO_SAT
1 = GLO_SAT_M (M 型卫星)
Uchar 1 H+4
5 Reserved 1 H+5
6 e week 星历参考时间整周数(相对于 GPS 时
间)
Ushort 2 H+6
7 e time 星历参考时间(相对于 GPS 时间),
毫秒
Ulong 4 H+8
8 t offset GPS 和 GLONAS 时间之间的整数秒。
正值表明 GLONASS 时间先于 GPS 时
间。
Ulong 4 H+12
9 Nt 当前日期,该字段仅 GLONSS-M 卫星
输出。
Ushort 2 H+16
10 Reserved 1 H+18
11 Reserved 1 H+19
12 issue 相对星历参考时间的 15 分钟间隔数 Ulong 4 H+20
13 health 星历健康
0 = GOOD
1 = BAD
Ulong 4 H+24
14 pos x 参考时间卫星的 X 坐标(PZ-90.02),
米
Double 8 H+28
15 pos y 参考时间卫星的 Y 坐标(PZ-90.02),
米
Double 8 H+36
16 pos z 参考时间卫星的 Z 坐标(PZ-90.02),
米
Double 8 H+44
17 vel x 参考时间卫星速度的 X 坐标
(PZ-90.02),米/秒
Double 8 H+52
18 vel y 参考时间卫星速度的 Y 坐标
(PZ-90.02),米/秒
Double 8 H+60
用户指令手册
- 36 -
ID 字段 数据描述 类型 字节数 字节偏
移
19 vel z 参考时间卫星速度的 Z 坐标
(PZ-90.02),米/秒
Double 8 H+68
20 LS acc x 参考时间日月摄动加速度的 X 坐标
(PZ-90.02),米/秒/秒
Double 8 H+76
21 LS acc y 参考时间日月摄动加速度的 Y 坐标
(PZ-90.02),米/秒/秒
Double 8 H+84
22 LS acc z 基准时间日月摄动加速度的 Z 坐标
(PZ-90.02),米/秒/秒
Double 8 H+92
23 tau_n 修正第n个相对于GLONASS 时间 t_c
的卫星时间 t_n,秒
Double 8 H+100
24 delta_tau_n 第 n 个卫星的 L2 RF 信号相对于 L1 RF
信号的传输延迟,秒
Double 8 H+108
25 gamma 频率校正,秒/秒 Double 8 H+116
26 Tk 帧起始时间(从 GLONASS 日开始),
秒
Ulong 4 H+124
27 P 技术参数 Ulong 4 H+128
28 Ft 用户测距精度预测 Ulong 4 H+132
29 age 数据龄期,日 Ulong 4 H+136
30 Flags 信息标识 Ulong 4 H+140
31 xxxx 32 位 CRC 校验 (仅 ASCII 和二进制) Hex 4 H+144
32 [CR][LF] 语句结束符(仅 ASCII) - - -
2.10 GPSEPHEM GPS 星历数据
用户可以通过该指令记录 GPS 星历。
Message ID: 7
推荐输入:
LOG GPSEPHEMA ONCHANGED
LOG消息输出
#GPSEPHEMA,COM1,0,49.0,SATTIME,0,0.000,00000000,e,0;9,354990.000000,0,17,17,1640,1640,3599
84.000000,2.656025221e+07,4.268392081e-09,1.265116550e+00,1.743639424e-02,1.575783199e+00,-2.2
14685082e-06,2.011656761e-07,3.884062500e+02,-3.537500000e+01,-1.173466444e-07,-3.185123205e-0
7,9.832984896e-01,-2.678683006e-11,1.877677745e+00,-8.428565369e-09,17,359984.000000,-5.5879354
48e-09,8.66796e-05,2.38742e-12,0.00000,TRUE,1.458590353e-04,4.000000000e+00*b5c5145f
#GPSEPHEMA,COM1,0,49.0,SATTIME,0,0.000,00000000,e,0;12,354990.000000,0,63,63,1640,1640,360
000.000000,2.656099374e+07,3.951950329e-09,1.837411750e+00,3.707165364e-03,-1.489442481e-01,-7
.005408406e-06,9.173527360e-06,2.106875000e+02,-1.309375000e+02,3.911554813e-08,5.774199963e-0
8,9.758708024e-01,2.678683006e-11,2.961028683e+00,-7.685320124e-09,63,360000.000000,-1.2107193
47e-08,2.77115e-06,2.61480e-12,0.00000,TRUE,1.458526110e-04,4.000000000e+00*0b952174

- 37 -
#GPSEPHEMA,COM1,0,49.0,SATTIME,0,0.000,00000000,e,0;31,354990.000000,0,72,72,1640,1640,360
000.000000,2.656041550e+07,4.128029092e-09,1.968904803e+00,7.602722500e-03,-9.526977646e-01,-2
.333894372e-06,6.519258022e-08,3.856875000e+02,-4.571875000e+01,9.872019291e-08,3.166496754e-
08,9.795546262e-01,-1.032185852e-10,1.907342403e+00,-8.116052352e-09,72,360000.000000,-1.303851
604e-08,9.62568e-05,5.79803e-12,0.00000,TRUE,1.458575499e-04,4.000000000e+00*44d404bf
ID 字段 数据描述 类型 字节数 字节偏
移
1 GPSEPHEM header
Log 头
H 0
2 PRN 卫星 PRN 编号(GPS:1 到 32) Ulong 4 H
3 tow 子帧 0 的时间戳(秒) Double 4 H+4
4 health 健康状态-ICD-GPS-200a 中定义的 6 位健康
代码
Ulong 4 H+12
5 IODE1 星历数据 1 龄期 Ulong 4 H+16
6 IODE2 星历数据 2 龄期 = GPS 的 IODE1 Ulong 4 H+20
7 Week GPS 周数 Ulong 4 H+24
8 Z Week Z 计数的周数,为星历表的子帧 1 的周数。
“TOW 周”(字段#7)来源于此。
Ulong 4 H+28
9 Toe 星历的参考时间,秒 Double 8 H+32
10 A 卫星轨道长半轴,米 Double 8 H+40
11 ΔN 卫星平均角速度的改正值,弧度/秒 Double 8 H+48
12 M0 TOE 时间的平近点角,弧度 Double 8 H+56
13 Ecc 卫星轨道偏心率 Double 8 H+64
14 ω 近地点幅角,弧度 Double 8 H+72
15 cuc 纬度幅角(余弦振幅,弧度) Double 8 H+80
16 cus 纬度幅角(正弦振幅,弧度) Double 8 H+88
17 crc 轨道半径(余弦振幅,米) Double 8 H+96
18 crs 轨道半径(正弦振幅,米) Double 8 H+104
19 cic 倾角(余弦振幅,弧度) Double 8 H+112
20 cis 倾角(正弦振幅,弧度) Double 8 H+120
21 I0 TOE 时间轨道倾角,弧度 Double 8 H+128
22 IDOT 轨道倾角变化率,弧度/秒 Double 8 H+136

用户指令手册
- 38 -
ID 字段 数据描述 类型 字节数 字节偏
移
23 Ω0 升交点赤经,弧度 Double 8 H+144
24 Ω dot 升交点赤经变化率,弧度/秒 Double 8 H+152
25 iodc 时钟数据龄期 Ulong 4 H+160
26 toc 卫星钟差参考时间,秒 Double 8 H+164
27 tgd 群延迟,秒 Double 8 H+172
28 af0 卫星钟差参数,秒(s) Double 8 H+180
29 af1 卫星钟速参数,(s/s) Double 8 H+188
30 af2 卫星钟漂参数,(s/s/s)
8 H+196
31 AS 反欺骗:
0 = FALSE 1 = TRUE
Enum 4 H+204
32 N 改正平均角速度,弧度/秒 Double 8 H+208
33 URA 用户距离精度,m2。ICD 中给出了一种算法
将原始星历中传输的 URAI 指数转化为名义
标准差值。我们输出这一名义值的平方(方
差)。
Double 8 H+216
34 xxxx 32 位 CRC 校验 (仅 ASCII 和二进制) Hex 4 H+224
35 [CR][LF] 语句结束符(仅 ASCII) - - -
2.11 GPGGA GPS 固定数据输出语句
GPS 接收机的时间,位置和定位相关数据。
Message ID: 218
推荐输入:
LOG GPGGA ONTIME 1
LOG消息输出 $GNGGA,025754.00,4004.74102107,N,11614.19532779,E,1,18,0.7,63.3224,M,-9.7848,M,00,0000*58
ID 字段 数据描述 Symbol 示例
1 $GPGGA Log 头 a
$GPGGA
2 utc 位置对应的 UTC 时间(小时/分钟/秒/十分
之一秒)
hhmmss.ss 170659.00
3 lat 纬度(DDmm.mm) IIII.II 4001.1220
4 lat dir 纬度方向(N = 北,S =南) a N

- 39 -
ID 字段 数据描述 Symbol 示例
5 lon 经度(DDDmm.mm) yyyyy.yy 11600.3622
6 lon dir 经度方向(E = 东,W = 西) a E
7 GPS qual GPS 质量指示符
0 = 定位不可用或无效
1 = 单点定位
2 = 伪距差分
4 = RTK 固定解
5 =RTK 浮点解
7 = 用户设定位置(Fixed Position)
x 1
8 # sats 使用中的卫星数。可能与所见数不一致。 xx 10
9 hdop 水平精度因子 x.x 1.0
10 alt 天线高度,高于/低于平均海平面 x.x 1098.44
11 a-units 天线高度单位(M = 米) M M
12 undulation 大地水准面差距–大地水准面和 WGS84
椭球面之间的距离
x.x -15.174
13 u-units 大地水准面差距单位(M = 米) M M
14 age 差分数据的年龄(秒) xx (没有差分数据时
为空)
15 stn ID 差分基站 ID,0000-1023 xxxx (没有差分数据时
为空)
16 *xx 校验和 *hh *3F
17 [CR][LF] 语句结束符
[CR][LF]
a) talker(log头中$符号后的前两个字符)为GP(仅GPS),BD(仅BD2)或GN(所有系统)设置。
b) 这里报告的最大龄期限制为99秒。
2.12 GPGSA GPS 的 DOP 值和有效卫星信息
GPS接收机运行模式,为导航和DOP值使用的卫星。
Message ID: 221
推荐输入:
LOG GPGSA ONTIME 1
LOG消息输出
$GPGSA,M,3,22,25,12,14,18,09,31,,,,,,1.7,0.9,1.4*37
ID 字段 数据描述 Symbol 例子
1 $GPGSA Log 头 a
$GPGSA

用户指令手册
- 40 -
ID 字段 数据描述 Symbol 例子
2 mode MA
A = 自动 2D/3D
M = 手动,强制在 2D 或 3D 下运行
M M
3 mode 123
模式:1 = 固定或不可用;2 = 2D;3 = 3D x 3
4 - 15
prn 在解中使用的卫星 PRN 编号(未使用的字段为
0),共有 12 个字段。(GPS: 1 到 32,GLONASS:
65 到 96,BD2 161 到 197)
xx,xx,..... 18,03,13, 25,16, 24,12, 20,,,,
16 pdop 位置精度因子 x.x 1.5
17 hdop 平面精度因子 x.x 0.9
18 vdop 高程精度因子 x.x 1.2
19 *xx 校验和 *hh *3F
20 [CR][LF] 语句结束符
[CR][LF]
a) talker(log头中$符号后的前两个字符)为GP(仅GPS),BD(仅BD2)或GN(所有系统)设置。
2.13 GPGST 伪距观测精度
此信息输出伪距观测精度,伪距观测精度将会传递至定位结果中,以用于给出定位解的精度信
息。
除RMS字段外,此信息反映了BESTPOS和GPGGA中位置的精度。由于RMS字段专用于伪距,
所以无法反映载波相位的观测精度,但它能反映PSRPOS中的由伪距计算的定位解精度。
Message ID: 222
推荐输入:
LOG GPGST ONTIME 1
LOG消息输出
$GPGST,141451.00,1.18,0.00,0.00,0.0000,0.00,0.00,0.00*6B
ID 字段 数据描述 Symbol 示例
1 $GPGST Log 头 a $GPGST
2
utc 位置对应的 UTC 时间(小时/分钟/秒/十分之一秒) hhmmss.ss
173653.00
3
rms 用于定位计算的伪距标准偏差(RMS),用于定位
的伪距信息包括观测的伪距和 DGPS 改正信息。
x.x
2.73
4
smjr std 误差椭球的长半轴 (m) x.x
2.55
5
smnr std 误差椭球的短半轴 (m) x.x
1.88
6
orient 误差椭球的方向(度,与真北的夹角) x.x
15.2525
7 lat std 纬度的标准差 (m) x.x 2.51

- 41 -
8 lon std 经度的标准差 (m) x.x 1.94
9 alt std 高度的标准差 (m) x.x 4.30
10 *xx 校验和 *hh *6E
11 [CR][LF] 语句结束符 [CR][LF]
a) talker(log头中$符号后的前两个字符)为GP(仅GPS),BD(仅BD2)或GN(所有系统)设置。
2.14 GPGSV 可视卫星状态输出
可见的SV数,PRN编号,仰角,方位角和SNR值。每条信息最多4个卫星。当需要时,可通过2
条或以上(最多9条)信息发送额外的卫星数据。传输的信息总数和正在传输的当前信息在前两
个字段中表明。
Message ID: 223
推荐输入:
LOG GPGSV ONTIME 1
LOG消息输出
$GPGSV,3,1,11,18,87,050,48,22,56,250,49,21,55,122,49,03,40,284,47*78
ID 字段 数据描述 Symbol 示例
1 $GPGSV Log 头 a
$GPGSV
2 # msgs 信息总数(1-9) x 3
3 msg # 信息数(1-9) x 1
4 # sats 可见的卫星总数。可能不同于使用中的卫星总数。 xx 09
5 prn 卫星 PRN 编号(GPS: 1 到 32,GLONASS: 65 到
96,BD2 161 到 197)
xxx 03
6 elev 仰角,度,最大 90 xx 51
7 azimuth 方位角,度数范围,true,000 到 359 xxx 140
8 SNR 信噪比 (C/No) 00-99 dB-Hz,不跟踪时为零 xx 42
… … …
… … …
下一个卫星 PRN 编号,仰角,方位角,SNR,
---
最后一个卫星 PRN 编号,仰角,方位角,SNR,
variable *xx 校验和 *hh *72
variable [CR][LF] 语句结束符
[CR][LF]
a) talker(log头中$符号后的前两个字符)为GP(仅GPS),BD(仅BD2)或GN(所有系统)设置。
2.15 GPHDT GPS 航向信息 Log
此Log给出以度为单位相对真北方向的航向信息。
该信息的输出需要接收机支持定向工作模式。

用户指令手册
- 42 -
Message ID: 1045
推荐输入:
LOG GPHDT ONCHANGED
LOG消息输出
$GNHDT,178.7236,T*15
ID 字段 数据描述 Symbol 示例
1 $GPHDT Log 头 a $GPHDT
2 heading 航向角 X.X 178.7236
3 TRUE 真北 T T
4 *XX 校验和 *hh *15
5 [CR][LF] 语句结束符 [CR][LF]
a) talker(log头中$符号后的前两个字符)为GP(仅GPS),BD(仅BD2)或GN(所有系统)设置。
2.16 GPRMC GPS 推荐信息
此信息包含接收机计算的时间、日期、位置、航向和速度信息。RMC信息是推荐的接收机最紧
凑导航信息。
GPRMC log输出相关信息时无需等待有效的历书。此外,它使用缺省参数计算的UTC时间。在
这种情况下,由于不能保证百分之百的精度,UTC时间状态设置为WARNING。当获得有效的
历书后,接收机将使用真实参数进行计算。此时,UTC时间状态设置为VALID。 Message ID: 225
推荐输入:
LOG GPRMC ONTIME 1
LOG 消息输出:
$GPRMC,144326.00,A,5107.0017737,N,11402.3291611,W,0.080,323.3,210307,0.0,E,A*20
ID 字段 数据描述 Symbol 示例
1 $GPRMC Log 头 a $GPRMC
2 utc 位置对应的 UTC 时间 hhmmss.ss 144326.00
3 pos status 位置状态:
A = 有效,V = 无效
A A
4 lat 纬度 (DDmm.mm) llll.ll 5107.0017737
5 lat dir 纬度方向
N = 北纬, S = 南纬
a N
6 lon 经度 (DDDmm.mm) yyyyy.yy 11402.3291611
7 lon dir 经度方向 a W

- 43 -
ID 字段 数据描述 Symbol 示例
E = 东经, W = 西经
8 speed Kn 地速,节 x.x 0.080
9 track true 航迹方向,度 x.x 323.3
10 date 日期: dd/mm/yy xxxxxx 210307
11 mag var 磁偏角, 度 b x.x 0.0
12 var dir 磁偏角方向 E/Wc a E
13 mode ind 定位模式指示器,请见表 19 a A
14 *xx 校验和 *hh *72
15 [CR][LF] 语句结束符 [CR][LF]
a) talker(log头中$符号后的前两个字符)为GP(仅GPS),BD(仅BD2)或GN(所有系统)设置。
b) 注意,此字段是实际的磁偏角并总为正值,磁偏角方向总为正值。
c) E向偏角需从真实航向中减去,W向偏角则需加到真实航向中。
表 19 NMEA 定位模式指示
模式 指示
A 单点定位
D 差分定位
E 推算定位
M 用户输入
N 数据无效
2.17 GPVTG 航迹角与地速
此信息输出航迹角和地速。
输出 GPZDA 无需等待有效的历书,而可以使用一个默认参数计算出 UTC 时间。
Message ID: 226
推荐输入:
LOG GPVTG ONTIME 1
LOG消息输出
$GPVTG,353.763,T,360.233,M,0.02335,N,0.04324,K,A*3B
ID 字段 数据描述 Symbol 示例
1 $GPVTG Log 头 a $GPVTG
2 track true 真北航迹角,度 x.x 24.168
3 T 真北航迹角标识 T T

用户指令手册
- 44 -
4
track mag
磁北航迹角,度:
Track mag = Track true + (MAGVAR correction)
x.x
24.168
5 M 磁北航迹角标识 M M
6 speed Kn 地速,节 x.x 0.4220347
7 N 速度单位标识, (N = Knots) N N
8 speed Km 地速,千米 x.x 0.781608
9 K 速度单位标识,(K = km/hr) K K
10 mode ind 定位模式指示器,请见表 19 a A
11 *xx 校验和 *hh *7A
12 [CR][LF] 语句结束符 [CR][LF]
a) talker(log头中$符号后的前两个字符)为GP(仅GPS),BD(仅BD2)或GN(所有系统)设置。
2.18 GPZDA UTC 时间和日期
输出GPZDA无需等待有效的历书,而可以使用一个默认参数计算出UTC时间。
Message ID: 227
推荐输入:
LOG GPZDA ONTIME 1
LOG消息输出
$GPZDA,024412.00,16,06,2011,,*64
ID 字段 数据描述 Symbol 示例
1 $GPZDA Log 头 a $GPZDA
2 utc UTC 时间 Hhmmss.ss
170659.00
3 Day 日,01 到 31 xx 08
4 month 月,01 到 12 xx 05
5 year 年 xxxx 1998
6 null 本地时区描述 –不可用 xx (无数据为
空)
7 null 本地时区分钟描述 – 不可用* xx (无数据为
空)
8 *xx 校验和 *hh *6F
9 [CR][LF] 语句结束符
[CR][LF]
a) talker(log头中$符号后的前两个字符)为GP(仅GPS),BD(仅BD2)或GN(所有系统)设置。
b) UB370不支持本地时区。字段6和7总是为零。
2.19 HEADING 航向信息
航向是移动基站(MOVINGBASE)至定向接收机(HEADING)间基线向量顺时针方向与真北
的夹角,该条信息当前可从定向接收机(HEADING)输出。
Message ID: 971 Recommended Input:

- 45 -
LOG HEADINGA ONCHANGED
LOG Message output:
#HEADINGA,COM1,0,29.0,FINE,1740,367835.000,00000000,e,0;SOL_COMPUTED,NARROW_I
NT,0.0014,286.2120,41.0552,0.0000,416.9299,654.8104,"0",20,17,17,17,0,01,0,c3*ce3d9c8e
ID 字段 数据描述 类型 字节数 字节偏移
1 HEADING header
Log 头 H 0
2 sol stat 解状态,参考表 21 解的状态 Enum 4 H
3 pos type 位置类型,参考表 20 位置或速度
类型
Enum 4 H+4
4 length 基线长 (0 到 3000 m) Float 4 H+8
5 heading 航向 (0 到 360.0 度) Float 4 H+12
6 pitch 俯仰(±90 degrees) Float 4 H+16
7 Reserved Float 4 H+20
8 hdgstddev 航向标准偏差 Float 4 H+24
9 ptchstddev 俯仰标准偏差 Float 4 H+28
10 stn id 基站 ID Char[4] 4 H+32
11 #SVs 跟踪的卫星数 Uchar 1 H+36
12 #solnSVs 使用的卫星数 Uchar 1 H+37
13 #obs 截止高度角以上的卫星数 Uchar 1 H+38
14 #multi 截止高度角以上有 L2 观测的卫星
数
Uchar 1 H+39
15 Reserved Uchar 1 H+40
16 ext sol stat 扩展解状态,参考表 29 扩展解状
态
Uchar 1 H+41
17 Reserved Uchar 1 H+42
18 sig mask 信号掩码,参考表 22 信号掩码 Uchar 1 H+43
19 xxxx 32 位 CRC 校验 (仅 ASCII 和二进
制)
Hex 4 H+44
20 [CR][LF] 语句结束符(仅 ASCII) _ _ _
对 UB280 等单板卡双天线产品 Heading 输出频度与 GGA、PSRPOS、RTKPOS 等一致,
即 GGA 5Hz,Heading 也 5Hz。在不输出任何位置、速度信息的情形下,Heading 仅以
1Hz 输出。
2.20 IONUTC GPS 电离层参数及 UTC 数据
提供电离层模型参数和UTC时间参数。
Message ID: 8
推荐输入:
LOG IONUTCA ONCHANGED

用户指令手册
- 46 -
LOG消息输出
#IONUTCA,COM1,0,49.0,SATTIME,1636,29067.000,00000000,e,0;1.117587089538575e-08,2.235174179077149e-08,-5.960464477539060e-08,-1.192092895507812e-07,9.830400000000000e+04,1.310720000000000e+05,-1.310720000000000e+05,-5.898240000000000e+05,1636,233472,-1.862645149230958e-09,-2.664535259100000e-15,1768,4,15,15,0*d83d7575
ID 字段 数据描述 类型 字节数 字节偏移
1 IONUTC header
Log头 H 0
2 a0 Alpha参数常数项 Double 8 H
3 a1 Alpha参数的1阶项 Double 8 H+8
4 a2 Alpha参数的2阶项 Double 8 H+16
5 a3 Alpha参数的3阶项 Double 8 H+24
6 b0 Beta参数的常数项 Double 8 H+32
7 b1 Beta参数的1阶项 Double 8 H+40
8 b2 Beta参数的2阶项 Double 8 H+48
9 b3 Beta参数的3阶项 Double 8 H+56
10 utc wn UTC参考周 Ulong 4 H+64
11 tot UTC 时间参数的参考时间 Ulong 4 H+68
12 A0 GPS 相对于 UTC 的钟差 Double 8 H+72
13 A1 GPS 相对于 UTC 的钟速 Double 8 H+80
14 wn lsf 新的闰秒生效的周计数 Ulong 4 H+88
15 dn 新的闰秒生效的周内日计数(范围为1
到7,周日=1,周六=7)
Ulong 4 H+92
16 deltat ls 新的闰秒生效前GPS相对于UTC的
累积闰秒改正数
Long 4 H+96
17 deltat lsf 新的闰秒生效后GPS相对于UTC的
累积闰秒改正数
Long 4 H+100
18 deltat utc GPS相对于UTC时间差 Ulong 4 H+104
19 xxxx 32位CRC校验 (仅ASCII和二进制) Hex 4 H+108
20 [CR][LF] 语句结束符(仅ASCII) - - -
2.21 LOGLIST LOG 列表
该信息列出当前系统运行的 log 信息,此命令不支持二进制信息格式。
Message ID: 5
推荐输入:
- 47 -
LOG LOGLISTA ONCE
LOG消息输出
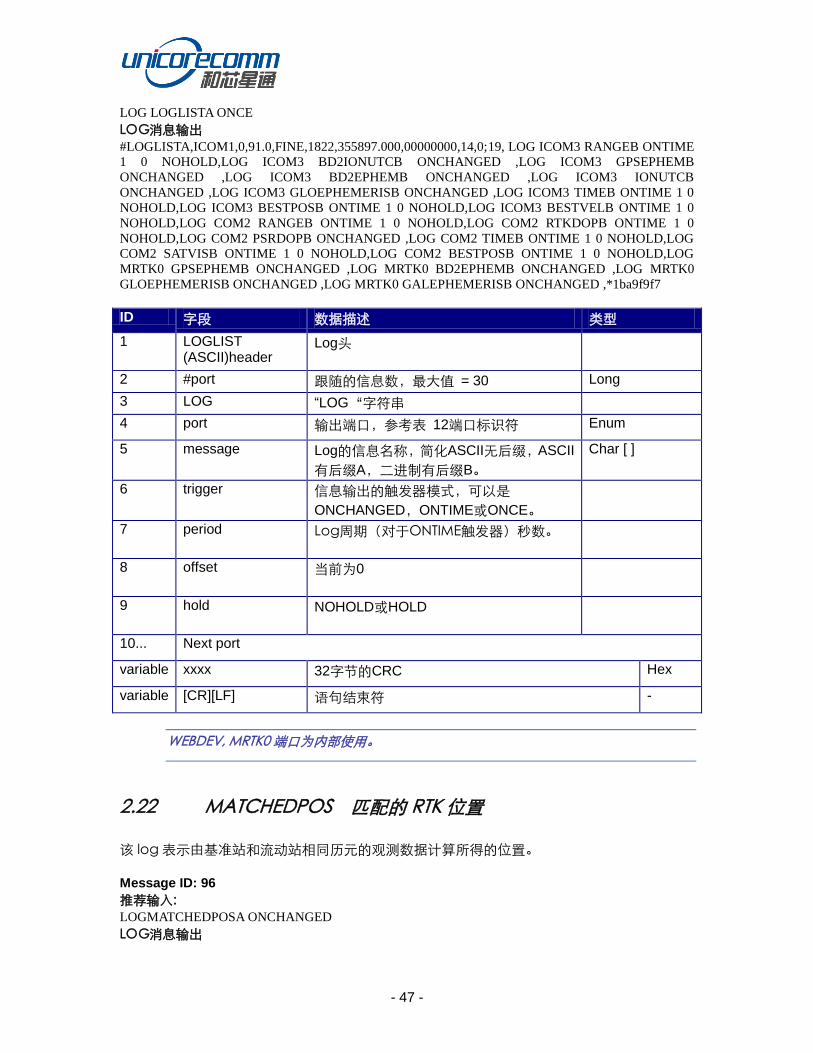
#LOGLISTA,ICOM1,0,91.0,FINE,1822,355897.000,00000000,14,0;19, LOG ICOM3 RANGEB ONTIME
1 0 NOHOLD,LOG ICOM3 BD2IONUTCB ONCHANGED ,LOG ICOM3 GPSEPHEMB
ONCHANGED ,LOG ICOM3 BD2EPHEMB ONCHANGED ,LOG ICOM3 IONUTCB
ONCHANGED ,LOG ICOM3 GLOEPHEMERISB ONCHANGED ,LOG ICOM3 TIMEB ONTIME 1 0
NOHOLD,LOG ICOM3 BESTPOSB ONTIME 1 0 NOHOLD,LOG ICOM3 BESTVELB ONTIME 1 0
NOHOLD,LOG COM2 RANGEB ONTIME 1 0 NOHOLD,LOG COM2 RTKDOPB ONTIME 1 0
NOHOLD,LOG COM2 PSRDOPB ONCHANGED ,LOG COM2 TIMEB ONTIME 1 0 NOHOLD,LOG
COM2 SATVISB ONTIME 1 0 NOHOLD,LOG COM2 BESTPOSB ONTIME 1 0 NOHOLD,LOG
MRTK0 GPSEPHEMB ONCHANGED ,LOG MRTK0 BD2EPHEMB ONCHANGED ,LOG MRTK0
GLOEPHEMERISB ONCHANGED ,LOG MRTK0 GALEPHEMERISB ONCHANGED ,*1ba9f9f7
ID 字段 数据描述 类型
1 LOGLIST (ASCII)header
Log头
2 #port 跟随的信息数,最大值 = 30 Long
3 LOG “LOG“字符串
4 port 输出端口,参考表 12端口标识符 Enum
5 message Log的信息名称,简化ASCII无后缀,ASCII
有后缀A,二进制有后缀B。
Char [ ]
6 trigger 信息输出的触发器模式,可以是
ONCHANGED,ONTIME或ONCE。
7 period Log周期(对于ONTIME触发器)秒数。
8 offset 当前为0
9 hold NOHOLD或HOLD
10... Next port
variable xxxx 32字节的CRC Hex
variable [CR][LF] 语句结束符 -
WEBDEV, MRTK0 端口为内部使用。
2.22 MATCHEDPOS 匹配的 RTK 位置
该 log 表示由基准站和流动站相同历元的观测数据计算所得的位置。
Message ID: 96
推荐输入:
LOGMATCHEDPOSA ONCHANGED
LOG消息输出

用户指令手册
- 48 -
#MATCHEDPOSA,COM1,0,43.0,FINE,1637,553171.000,00000000,0,0;SOL_COMPUTED,NARROW_INT,40.08745302253,116.23178643978,50.4136,0.0000,WGS84,0.0070,0.0066,0.0125,"0",0.000,0.000,10,9,9,6,0,1,0,3*3e1814cd
ID 字段 数据描述 类型 字节数 字 节 偏
移
1 MATCHED-POS header
Log 头
H 0
2 sol status 解算状态,参考表 21 解的状态 Enum 4 H
3 pos type 位置类型,参考表 20 位置或速
度类型
Enum 4 H+4
4 lat 纬度 Double 8 H+8
5 lon 经度 Double 8 H+16
6 hgt 海拔高 Double 8 H+24
7 undulation 大地水准面差距-大地水准面和
WGS84 椭球面(米)之间的距离
Float 4 H+32
8 datum id# 坐标系 ID,当前仅支持 WGS84,
ID:WE
Enum 4 H+36
9 lat σ 纬度标准差 Float 4 H+40
10 lon σ 精度标准差 Float 4 H+44
11 hgt σ 高度标准差 Float 4 H+48
12 stn id 基站 ID Char[4] 4 H+52
13 Reserved Float 4 H+56
14 Float 4 H+60
15 #SVs 跟踪的卫星数 Uchar 1 H+64
16 #solnSVs 使用的卫星数 Uchar 1 H+65
17 #gbL1 使用单频的卫星数 Uchar 1 H+66
18 #gbL1L2 使用双频或三频的卫星数 Uchar 1 H+67
19 Reserved Uchar 1 H+68
20 ext sol stat 扩展解状态,参考表 29 扩展解
状态
Hex 1 H+69
21 Reserved Hex 1 H+70
22 sig mask 信号掩码- 若为 0,解中使用的信
号未知,参考表 22 信号掩码
Hex 1 H+71
23 xxxx 32 位 CRC 校验 (仅 ASCII 和二
进制)
Hex 4 H+72
24 [CR][LF] 语句结束符(仅 ASCII) - - -

- 49 -
2.23 MATCHEDPOSH 匹配的 RTK 位置
对于单板双天线产品,该 log 表示由移动基站端(Movingbase)和定向端(Heading)相同
历元的观测数据计算所得的位置。
Message ID: 6006 LOGMATCHEDPOSHA ONCHANGED
LOG消息输出
#MATCHEDPOSHA,COM1,0,43.0,FINE,1637,553171.000,00000000,0,0;SOL_COMPUTED,NARROW_INT,40.08745302253,116.23178643978,50.4136,0.0000,WGS84,0.0070,0.0066,0.0125,"0",0.000,0.000,10,9,9,6,0,1,0,3*3e1814cd
ID 字段 数据描述 类型 字节数 字 节 偏
移
1 MATCHEDPOSH header
Log 头
H 0
2 sol status 解算状态,参考表 21 解的状态 Enum 4 H
3 pos type 位置类型,参考表 20 位置或速
度类型
Enum 4 H+4
4 lat 纬度 Double 8 H+8
5 lon 经度 Double 8 H+16
6 hgt 海拔高 Double 8 H+24
7 undulation 大地水准面差距-大地水准面和
WGS84 椭球面(米)之间的距离
Float 4 H+32
8 datum id# 坐标系 ID,当前仅支持 WGS84,
ID:WE
Enum 4 H+36
9 lat σ 纬度标准差 Float 4 H+40
10 lon σ 精度标准差 Float 4 H+44
11 hgt σ 高度标准差 Float 4 H+48
12 stn id 基站 ID Char[4] 4 H+52
13 Reserved Float 4 H+56
14 Float 4 H+60
15 #SVs 跟踪的卫星数 Uchar 1 H+64
16 #solnSVs 使用的卫星数 Uchar 1 H+65
17 #gbL1 使用单频的卫星数 Uchar 1 H+66
18 #gbL1L2 使用双频或三频的卫星数 Uchar 1 H+67
19 Reserved Uchar 1 H+68

用户指令手册
- 50 -
ID 字段 数据描述 类型 字节数 字 节 偏
移
20 ext sol stat 扩展解状态,参考表 29 扩展解
状态
Hex 1 H+69
21 Reserved Hex 1 H+70
22 sig mask 信号掩码- 若为 0,解中使用的信
号未知,参考表 22 信号掩码
Hex 1 H+71
23 xxxx 32 位 CRC 校验 (仅 ASCII 和二
进制)
Hex 4 H+72
24 [CR][LF] 语句结束符(仅 ASCII) - - -
此信息仅适用于单板卡双天线定向产品。
2.24 NETSTATUS 网络状态
该 log 表示网络状态,特别是当接收机在 NETCONFIG 指令设置的 DHCP 模式下工作时。
该信息暂不支持二进制输出。
Message ID: 2014
推荐输入:
LOG NETSTATUSA ONCE
ID 字段 数据描述
1 NETSTATUS header
Log 头
2 status string =
<client-ip>:<server-ip>:<gw-ip>:<netmask>:<hostname
>:<device>
client-ip: 接收机的 IP 地址
server-ip: DHCP 服务器的 IP 地址
gw-ip: 网关的 IP 地址,若服务器在另一个子网上。
netmask: 本地网络接口的网络掩码,若未指定
hostname: 接收机名称。可能通过自动配置提供,但其缺失
不会触发自动配置。
device: 使用的网络设备名称
4 xxxx 32位CRC校验 (仅ASCII和二进制)
5 [CR][LF] 语句结束符(仅ASCII)
此信息仅适用于具备网络接口通信能力的板卡。

- 51 -
2.25 PASSCOM 转发数据
该转发log功能使得接收机将任何特定端口输入的ASCII或二进制数据重定向到其他指定的接收
机端口。
Message ID:
PASSCOM1 Message ID:233
PASSCOM2 Message ID:234
PASSCOM3 Message ID:235
推荐输入:
LOG PASSCOM2A ONCHANGED
LOG消息输出
#PASSCOM2A,COM1,0,64.0,FINESTEERING,1337,400920.201,00000000,2b46,1984;80,ED,SINGLE,5
1.11636326036,-114.03824210485,1062.6015,-16.2713,WGS84,1.8963,1.0674*807fd3ca
ID 字段 数据描述 类型 字节数 字节偏移
1 PASSACOM header
Log头 H 0
2 #bytes 跟随的字节数 Ulong 4 H
3 data 信息数据 Char[80]
80 H+4
4 xxxx 32位CRC校验 (仅ASCII和二
进制)
Hex 4 H+8+(#bytes)
5 [CR][LF] 语句结束符(仅ASCII) - - -
2.26 PSRDOP 伪距 DOP
精度衰减因子由接收机当前跟踪并在位置解中使用的卫星的几何分布算出。该log每60秒,或者
当卫星星座改变时更新一次。因此该Log输出的数据字段总数可变,并取决于被跟踪的卫星数。
Message ID: 174
推荐输入:
LOG PSRDOPA ONCHANGED
LOG消息输出
#PSRDOPA,COM1,0,47.0,FINE,1640,368295.000,00000000,e,0;1.759970,1.533887,0.785047,1.166612,0.
862950,10.000000,13,31,29,16,23,6,3,20,32,168,167,161,163,164*5fcaac4b
ID 字段 数据描述 类型 字节数 字节偏移
1 PSRDOP header
Log头
H 0
2 gdop 几何精度因子 - 假设3-D位置和接收机
钟差(全部的4个参数)未知
Float 4 H
3 pdop 位置精度因子 - 假设3-D位置未知,接
收机钟差已知
Float 4 H+4

用户指令手册
- 52 -
ID 字段 数据描述 类型 字节数 字节偏移
4 hdop 水平精度因子 Float 4 H+8
5 htdop 水平和时间精度因子 Float 4 H+12
6 tdop 时间精度因子 - 假设3-D位置已知,接
收机钟差未知
Float 4 H+16
7 cutoff 截止高度角 Float 4 H+20
8 #PRN 跟踪的卫星总数 Long 4 H+24
9 PRN 跟踪卫星的PRN,在位置解可用前为null
字段
Ulong 4 H+28
10... Next PRN offset = H + 28 + (#prn x 4)
variable xxxx 32位CRC校验 (仅ASCII和二进制) Hex 4 H+28+ (#prn x 4)
variable [CR][LF] 语句结束符(仅ASCII) - - -
2.27 PSRPOS 伪距位置信息
该 Log 包含接收机伪距定位的位置及定位精度、状态等信息。
Message ID: 47
推荐输入:
LOG PSRPOSA ONTIME 1
LOG消息输出
#PSRPOSA,COM1,0,48.0,FINE,1640,368366.000,00000000,e,0;SOL_COMPUTED,SINGLE,40.0369620
4192,116.30176579652,68.8433,-9.7989,WGS84,1.2588,1.2050,3.0857,"",0.000,0.000,14,13,0,0,0,06,0,c3
*4b9bb40c
ID 字段 数据描述 类型 字节数 字节偏移
1 PSRPOS header
Log 头
H 0
2 sol status 解的状态,参考表 21 解的状态 Enum 4 H
3 pos type 位置类型,参考表 20 位置或速度类型 Enum 4 H+4
4 lat 纬度 Double
8 H+8
5 lon 精度 Double
8 H+16
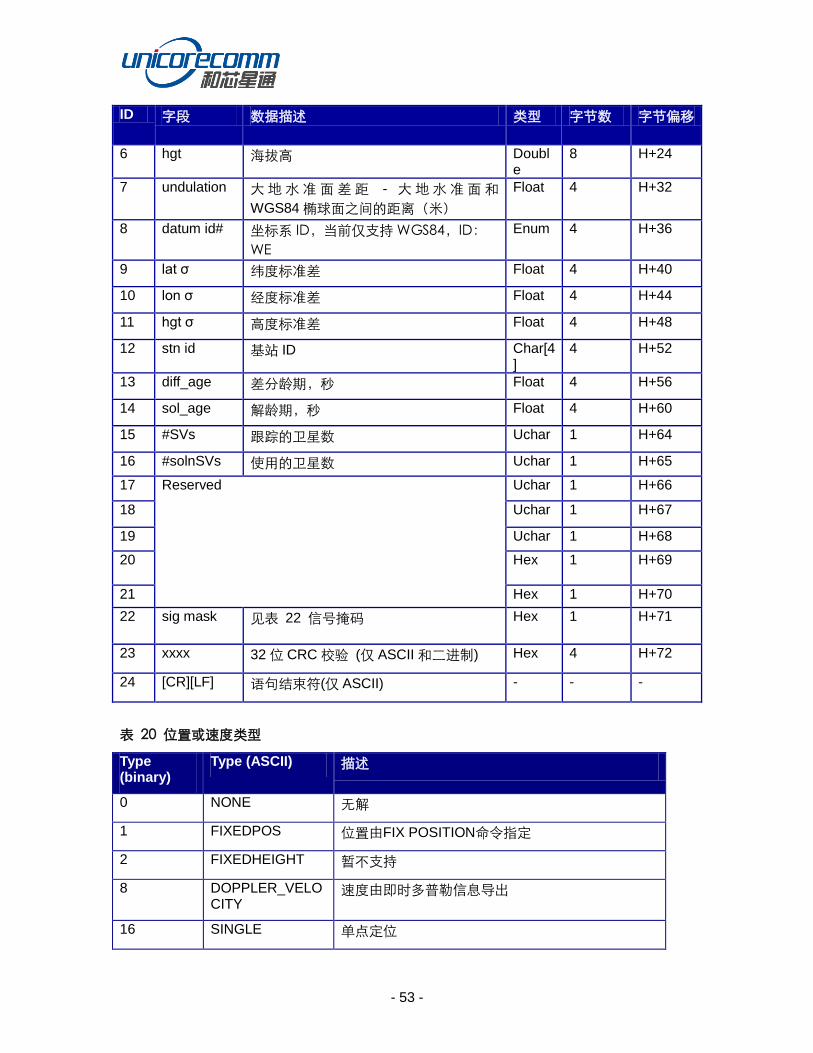
- 53 -
ID 字段 数据描述 类型 字节数 字节偏移
6 hgt 海拔高 Double
8 H+24
7 undulation 大 地 水 准 面 差 距 - 大 地 水 准 面 和
WGS84 椭球面之间的距离(米)
Float 4 H+32
8 datum id# 坐标系 ID,当前仅支持 WGS84,ID:
WE
Enum 4 H+36
9 lat σ 纬度标准差 Float 4 H+40
10 lon σ 经度标准差 Float 4 H+44
11 hgt σ 高度标准差 Float 4 H+48
12 stn id 基站 ID Char[4]
4 H+52
13 diff_age 差分龄期,秒 Float 4 H+56
14 sol_age 解龄期,秒 Float 4 H+60
15 #SVs 跟踪的卫星数 Uchar 1 H+64
16 #solnSVs 使用的卫星数 Uchar 1 H+65
17 Reserved
Uchar 1 H+66
18 Uchar 1 H+67
19 Uchar 1 H+68
20 Hex 1 H+69
21 Hex 1 H+70
22 sig mask 见表 22 信号掩码 Hex 1 H+71
23 xxxx 32 位 CRC 校验 (仅 ASCII 和二进制) Hex 4 H+72
24 [CR][LF] 语句结束符(仅 ASCII) - - -
表 20 位置或速度类型
Type (binary)
Type (ASCII) 描述
0 NONE 无解
1 FIXEDPOS 位置由FIX POSITION命令指定
2 FIXEDHEIGHT 暂不支持
8 DOPPLER_VELOCITY
速度由即时多普勒信息导出
16 SINGLE 单点定位

用户指令手册
- 54 -
Type (binary)
Type (ASCII) 描述
17 PSRDIFF 伪距差分解
32 L1_FLOAT L1浮点解
33 IONOFREE_FLOAT
消电离层浮点解
34 NARROW_FLOAT 窄巷浮点解
48 L1_INT L1固定解
49 WIDE_INT 宽巷固定解
50 NARROW_INT 窄巷固定解
表 21 解的状态
Solution Status 描述
(Binary)
(ASCII)
0 SOL_COMPUTED 已解出
1 INSUFFICIENT_OBS 观测数据不足
2 NO_CONVERGENCE 无法收敛
4 COV_TRACE 协方差矩阵的迹超过最大值(迹>1000 米)
表 22 信号掩码
Bit Mask 描述
0 0x01 使用GPS L1计算
1 0x02 使用GPS L2计算
2 0x04 使用GPS L5计算
3 0x08 使用BD2 B3计算
4 0x10 使用GLONASS L1计算
5 0x20 使用GLONASS L2计算
6 0x40 使用BD2 B1计算
7 0x80 使用BD2 B2计算
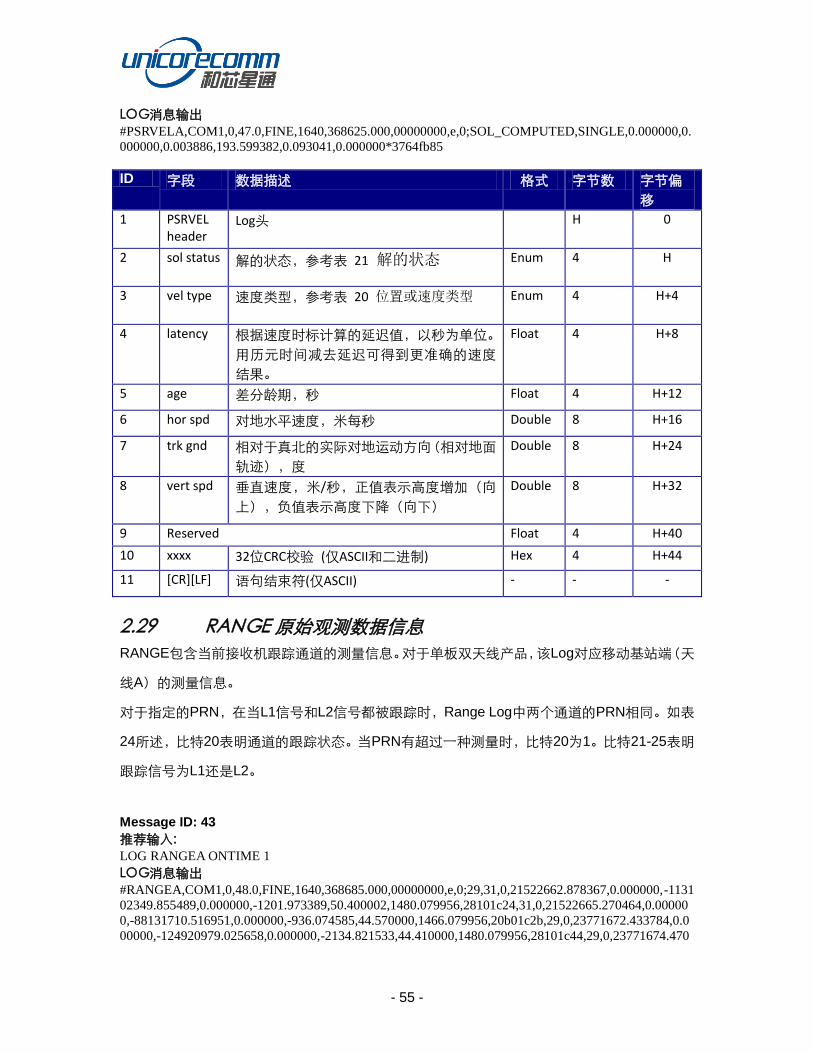
2.28 PSRVEL 伪距速度
该 Log 包含接收机伪距定位的速度和速度精度、定位状态等信息。
Message ID: 100
推荐输入:
LOG PSRVELA ONTIME 1
- 55 -
LOG消息输出
#PSRVELA,COM1,0,47.0,FINE,1640,368625.000,00000000,e,0;SOL_COMPUTED,SINGLE,0.000000,0.
000000,0.003886,193.599382,0.093041,0.000000*3764fb85
ID 字段 数据描述 格式 字节数 字节偏
移
1 PSRVEL header
Log头
H 0
2 sol status 解的状态,参考表 21 解的状态 Enum 4 H
3 vel type 速度类型,参考表 20 位置或速度类型 Enum 4 H+4
4 latency 根据速度时标计算的延迟值,以秒为单位。
用历元时间减去延迟可得到更准确的速度
结果。
Float 4 H+8
5 age 差分龄期,秒 Float 4 H+12
6 hor spd 对地水平速度,米每秒 Double 8 H+16
7 trk gnd 相对于真北的实际对地运动方向(相对地面
轨迹),度
Double 8 H+24
8 vert spd 垂直速度,米/秒,正值表示高度增加(向
上),负值表示高度下降(向下)
Double 8 H+32
9 Reserved Float 4 H+40
10 xxxx 32位CRC校验 (仅ASCII和二进制) Hex 4 H+44
11 [CR][LF] 语句结束符(仅ASCII) - - -
2.29 RANGE 原始观测数据信息
RANGE包含当前接收机跟踪通道的测量信息。对于单板双天线产品,该Log对应移动基站端(天
线A)的测量信息。
对于指定的PRN,在当L1信号和L2信号都被跟踪时,Range Log中两个通道的PRN相同。如表
24所述,比特20表明通道的跟踪状态。当PRN有超过一种测量时,比特20为1。比特21-25表明
跟踪信号为L1还是L2。
Message ID: 43
推荐输入:
LOG RANGEA ONTIME 1
LOG消息输出
#RANGEA,COM1,0,48.0,FINE,1640,368685.000,00000000,e,0;29,31,0,21522662.878367,0.000000,-1131
02349.855489,0.000000,-1201.973389,50.400002,1480.079956,28101c24,31,0,21522665.270464,0.00000
0,-88131710.516951,0.000000,-936.074585,44.570000,1466.079956,20b01c2b,29,0,23771672.433784,0.0
00000,-124920979.025658,0.000000,-2134.821533,44.410000,1480.079956,28101c44,29,0,23771674.470

用户指令手册
- 56 -
675,0.000000,-97341036.760429,0.000000,-1663.703857,34.779999,1465.079956,20b01c4b,16,0,2066381
3.781388,0.000000,-108589070.879561,0.000000,1461.394043,51.790001,1480.079956,28101c64,16,0,20
663816.385761,0.000000,-84614882.902346,0.000000,1139.255859,45.430000,1465.079956,20b01c6b,23
,0,21839644.292886,0.000000,-114768114.755380,0.000000,2724.885010,49.169998,1462.079956,28101
c84,23,0,21839646.119401,0.000000,-89429703.587232,0.000000,2123.152344,41.830002,1447.329956,2
0b01c8b,30,0,19985015.817035,0.000000,-105021967.208607,0.000000,36.100784,51.910000,26.000000,
28101ca4,30,0,19985019.605356,0.000000,-81835313.794048,0.000000,28.449669,46.750000,1466.0799
56,20b01cab,6,0,22380498.984575,0.000000,-117610342.372513,0.000000,3441.572998,44.320000,1479.
079956,28101cc4,6,0,22380503.811258,0.000000,-91644433.794094,0.000000,2681.808105,39.020000,14
06.000000,20b01ccb,3,0,23185158.987233,0.000000,-121838885.817519,0.000000,4137.024414,44.0299
99,1479.079956,28101ce4,3,0,23185164.346715,0.000000,-94939378.174707,0.000000,3223.519287,34.5
00000,926.000000,20b01ceb,20,0,23917425.214502,0.000000,-125686908.608234,0.000000,-1674.17529
3,41.689999,1479.079956,28101d04,20,0,23917429.251493,0.000000,-60137864.445714,0.000000,-1303.
321167,31.830000,1328.000000,20b01d0b,32,0,23928288.560492,0.000000,-125743986.752250,0.000000
,-2202.824707,43.110001,1479.079956,28101d44,32,0,23928293.575890,0.000000,-97982344.027243,0.0
00000,-1715.264648,34.790001,1462.079956,20b01d4b,13,0,24397485.083951,0.000000,-128209688.338
887,0.000000,3860.196045,38.820000,1178.000000,28001d64,168,0,36674221.429852,0.000000,-190972
301.296226,0.000000,991.454590,47.439999,1481.079956,28141da4,168,0,36674232.575787,0.000000,-1
47671943.511395,0.000000,766.237854,48.410000,1463.079956,20b41dab,167,0,36222563.089956,0.000
000,-188620390.687521,0.000000,-17.192915,49.650002,1480.079956,28141dc4,167,0,36222572.844285,
0.000000,-145853286.467924,0.000000,-12.757592,49.369999,1464.079956,20b41dcb,161,0,38252141.87
0843,0.000000,-199188947.764499,0.000000,209.672607,50.380001,1480.079956,28141de4,161,0,38252
149.212982,0.000000,-154025550.394550,0.000000,162.547119,52.410000,1465.079956,20b41deb,163,0,
38313026.888069,0.000000,-199505983.413984,0.000000,237.998779,49.790001,1475.079956,28141e04,
163,0,38313037.836279,0.000000,-154270730.168275,0.000000,184.890472,51.020000,1459.079956,20b
41e0b,164,0,39275813.678787,0.000000,-204519478.754726,0.000000,219.763489,46.590000,1481.0799
56,28141e24,164,0,39275826.507820,0.000000,-158147464.461486,0.000000,167.577194,50.160000,146
3.079956,20b41e2b*6cf35521
ID 字段 数据描述 类型 字节数 字节偏移
1 RANGE header
Log 头
H 0
2 # obs 对应的观测信息个数 Long 4 H
3 PRN/ slot 卫星 PRN 号(GPS:1 到 32,
GLONASS: 38 到 62,BD2
161 到 197)
UShort
2 H+4
4 glofreq (GLONASS 频率+ 7),GPS
和 BD2 不使用
Ushort 2 H+6
5 psr 码伪距测量值(米) Double
8 H+8
6 psr std 码伪距标准差(米) Float 4 H+16
7 adr 载波相位,周(积分多普勒) Double
8 H+20
8 adr std 载波相位标准差(周) Float 4 H+28
9 dopp 瞬时多普勒(Hz)
Float 4 H+32

- 57 -
ID 字段 数据描述 类型 字节数 字节偏移
10 C/No 载噪比 C/No = 10[log10(S/N0)]
(dB-Hz)
Float 4 H+36
11 locktime 秒,连续跟踪时间(无周跳) Float 4 H+40
12 ch-tr-status
跟踪状态,参考表 24 通道跟
踪状态
Ug 4 H
13… Next PRN offset = H + 4 + (#obs x 44)
variable
xxxx 32 位 CRC 校验 (仅 ASCII 和二
进制)
Hex 4 H+4+ (#obs x 44)
variable
[CR][LF] 语句结束符(仅 ASCII) - - -
表 23 跟踪状态
State 描述 State 描述
0 保留 7 保留
1 保留 8 保留
2 保留 9 保留
3 保留 10 保留
4 L1 锁相环 11 L2 锁相环
5 保留 19 保留
6 保留
表 24 通道跟踪状态
Nibble #
Bit #
Mask 描述 Range Value
N0 0 0x00000001 跟踪状态 0-11,参考表 23 跟踪状态
1 0x00000002
2 0x00000004
3 0x00000008
N1 4 0x00000010
5 0x00000020 SV 通道号 0-n (0 = 第一个, n = 最后一个)

用户指令手册
- 58 -
Nibble #
Bit #
Mask 描述 Range Value
6 0x00000040 n 视具体接收机
7 0x00000080
N2 8 0x00000100
9 0x00000200
10 0x00000400 相位锁定标志 0 = 未锁定, 1 = 锁定
11 0x00000800 极性确定标志 0 = 未确定, 1 = 已确定
N3 12 0x00001000 码锁定标志 0 = 未锁定 1 = 锁定
13 0x00002000 保留
14 0x00004000
15 0x00008000
N4 16 0x00010000 卫星系统 0 = GPS 1 = GLONASS
2-3 = 保留
4 = BD2
5-7 = 保留
17 0x00020000
18 0x00040000
19 0x00080000 保留
N5 20 0x00100000 分组 a 0 =未分组, 1 = 已分组
21 0x00200000 信号类型 依赖于所支持的卫星系统:
GPS 0 = L1C/A 5 = L2P 9 = L2P codeness 14 = L5 Q 17 = L2C GLONASS 0 = L1 C/A 5 = L2 P
BD2: 0=B1 17 =B2 21 = B3
22 0x00400000
23 0x00800000
N6 24 0x01000000
25 0x02000000
26 0x04000000 保留
27 0x08000000 保留
N7 28 0x10000000 保留
29 Reserved
30 0x40000000 保留
31 0x80000000 保留
a. 分组:每个通道都有与其相关联的通道(L1/L2或B1/B2/B3成组)

- 59 -
2.30 RANGEH 原始观测数据信息
RANGEH包含单板双天线产品定向端(天线B)跟踪通道的测量信息。
对于指定的PRN,在当L1信号和L2信号都被跟踪时,Rangeh Log中两个通道的PRN相同。如
表 24所述,比特20表明通道的跟踪状态。当PRN有超过一种测量时,比特20为1。比特21-25
表明跟踪信号为L1还是L2。
Message ID: 6005 LOG RANGEHA ONTIME 1
LOG消息输出
#RANGEHA,COM1,0,48.0,FINE,1640,368685.000,00000000,e,0;29,31,0,21522662.878367,0.000000,-11
3102349.855489,0.000000,-1201.973389,50.400002,1480.079956,28101c24,31,0,21522665.270464,0.000
000,-88131710.516951,0.000000,-936.074585,44.570000,1466.079956,20b01c2b,29,0,23771672.433784,0
.000000,-124920979.025658,0.000000,-2134.821533,44.410000,1480.079956,28101c44,29,0,23771674.47
0675,0.000000,-97341036.760429,0.000000,-1663.703857,34.779999,1465.079956,20b01c4b,16,0,206638
13.781388,0.000000,-108589070.879561,0.000000,1461.394043,51.790001,1480.079956,28101c64,16,0,2
0663816.385761,0.000000,-84614882.902346,0.000000,1139.255859,45.430000,1465.079956,20b01c6b,2
3,0,21839644.292886,0.000000,-114768114.755380,0.000000,2724.885010,49.169998,1462.079956,2810
1c84,23,0,21839646.119401,0.000000,-89429703.587232,0.000000,2123.152344,41.830002,1447.329956,
20b01c8b,30,0,19985015.817035,0.000000,-105021967.208607,0.000000,36.100784,51.910000,26.00000
0,28101ca4,30,0,19985019.605356,0.000000,-81835313.794048,0.000000,28.449669,46.750000,1466.079
956,20b01cab,6,0,22380498.984575,0.000000,-117610342.372513,0.000000,3441.572998,44.320000,1479
.079956,28101cc4,6,0,22380503.811258,0.000000,-91644433.794094,0.000000,2681.808105,39.020000,1
406.000000,20b01ccb,3,0,23185158.987233,0.000000,-121838885.817519,0.000000,4137.024414,44.029
999,1479.079956,28101ce4,3,0,23185164.346715,0.000000,-94939378.174707,0.000000,3223.519287,34.
500000,926.000000,20b01ceb,20,0,23917425.214502,0.000000,-125686908.608234,0.000000,-1674.1752
93,41.689999,1479.079956,28101d04,20,0,23917429.251493,0.000000,-60137864.445714,0.000000,-1303
.321167,31.830000,1328.000000,20b01d0b,32,0,23928288.560492,0.000000,-125743986.752250,0.00000
0,-2202.824707,43.110001,1479.079956,28101d44,32,0,23928293.575890,0.000000,-97982344.027243,0.
000000,-1715.264648,34.790001,1462.079956,20b01d4b,13,0,24397485.083951,0.000000,-128209688.33
8887,0.000000,3860.196045,38.820000,1178.000000,28001d64,168,0,36674221.429852,0.000000,-19097
2301.296226,0.000000,991.454590,47.439999,1481.079956,28141da4,168,0,36674232.575787,0.000000,-
147671943.511395,0.000000,766.237854,48.410000,1463.079956,20b41dab,167,0,36222563.089956,0.00
0000,-188620390.687521,0.000000,-17.192915,49.650002,1480.079956,28141dc4,167,0,36222572.84428
5,0.000000,-145853286.467924,0.000000,-12.757592,49.369999,1464.079956,20b41dcb,161,0,38252141.
870843,0.000000,-199188947.764499,0.000000,209.672607,50.380001,1480.079956,28141de4,161,0,382
52149.212982,0.000000,-154025550.394550,0.000000,162.547119,52.410000,1465.079956,20b41deb,163
,0,38313026.888069,0.000000,-199505983.413984,0.000000,237.998779,49.790001,1475.079956,28141e
04,163,0,38313037.836279,0.000000,-154270730.168275,0.000000,184.890472,51.020000,1459.079956,2
0b41e0b,164,0,39275813.678787,0.000000,-204519478.754726,0.000000,219.763489,46.590000,1481.07
9956,28141e24,164,0,39275826.507820,0.000000,-158147464.461486,0.000000,167.577194,50.160000,1
463.079956,20b41e2b*6cf35521
ID 字段 数据描述 类型 字节数 字节偏移
1 RANGE H header
Log 头
H 0
2 # obs 对应的观测信息个数 Long 4 H

用户指令手册
- 60 -
ID 字段 数据描述 类型 字节数 字节偏移
3 PRN/ slot 卫星 PRN 号(GPS:1 到 32,
GLONASS: 38 到 62,BD2
161 到 197)
UShort
2 H+4
4 glofreq (GLONASS 频率+ 7),GPS
和 BD2 不使用
Ushort 2 H+6
5 psr 码伪距测量值(米) Double
8 H+8
6 psr std 码伪距标准差(米) Float 4 H+16
7 adr 载波相位,周(积分多普勒) Double
8 H+20
8 adr std 载波相位标准差(周) Float 4 H+28
9 dopp 瞬时多普勒(Hz)
Float 4 H+32
10 C/No 载噪比 C/No = 10[log10(S/N0)]
(dB-Hz)
Float 4 H+36
11 locktime 秒,连续跟踪时间(无周跳) Float 4 H+40
12 ch-tr-status
跟踪状态,参考表 24 通道跟
踪状态
Ug 4 H
13… Next PRN offset = H + 4 + (#obs x 44)
variable
xxxx 32 位 CRC 校验 (仅 ASCII 和二
进制)
Hex 4 H+4+ (#obs x 44)
variable
[CR][LF] 语句结束符(仅 ASCII) - - -
此信息仅适用于单板卡双天线定向产品。
2.31 RANGECMP 压缩格式原始观测数据信息
该信息包含压缩格式的 RANGE 数据信息。
Message ID: 140
推荐输入:
LOG RANGECMPA ONTIME 1
LOG 消息输出
#RANGECMPA,COM1,0,63.5,FINESTEERING,
1429,226780.000,00000000,9691,2748;
26,
049C10081857F2DF1F4A130BA2888EB9600603A709030000,
0B9C3001225BF58F334A130BB1E2BED473062FA609020000,
449C1008340400E0AAA9A109A7535BAC2015CF71C6030000,
4B9C300145030010A6A9A10959C2F09120151F7166030000,

- 61 -
...
0B9D301113C8FFEFC284000C6EA051DBF3089DA1A0010000,
249D1018C6B7F67FA228820AF2E5E39830180AE1A8030000,
2B9D301165C4F8FFB228820A500A089F31185FE0A8020000,
449D1018BE18F41F2AACAD0A1A934EFC40074ECF88030000,
4B9D301182B9F69F38ACAD0A3E3AC28841079FCB88020000,
849D101817A1F95F16D7AF0A69FBE1FA401D3FD064030000,
8B9D30112909FB2F20D7AF0A9F24A687521DDECE64020000,
249E1118AF4E0470F66D4309A0A631CD642CF5B821320000,
2B9EB110A55903502F6E4309EE28D1AD032C7CB7E1320000,
849E1118B878F54F4ED2AA098C35558A532BDE1765220000,
8B9EB110ABCFF71F5ED2AA09CB6AD0F9032B9D16C5220000*0EEEAD18
表 25 Rangecmp 记录格式
数据 Bit(s) 低 位 到 高
位
位长(bits) 比例因子 单位
Channel Tracking Status 0-31
32
见 -
Doppler Frequency 32-59 28 1/256 Hz
Pseudorange (PSR) 60-95 36 1/128 m
ADR1 96-127 32 1/256 cycles
StdDev-PSR 128-131 4 见2 m
StdDev-ADR 132-135 4 (n+1)/512 cycles
PRN/Slot3 136-143 8 1 -
Lock Time4 144-164 21 1/32 s
C/No5 165-169 5 (20 + n) dB-Hz
Reserved 170-191 22
1 ADR 以下式进行计算:
ADR_ROLLS = (RANGECMP_PSR / WAVELENGTH + RANGECMP_ADR) / MAX_VALUE
取整至最靠近的整数,取整方法:
IF (ADR_ROLLS 0)
ADR_ROLLS = ADR_ROLLS - 0.5 ELSE
ADR_ROLLS = ADR_ROLLS + 0.5
得到取整后的 ADR_ROLLS。
改正后的 ADR 为:
CORRECTED_ADR = RANGECMP_ADR - (MAX_VALUE*ADR_ROLLS)
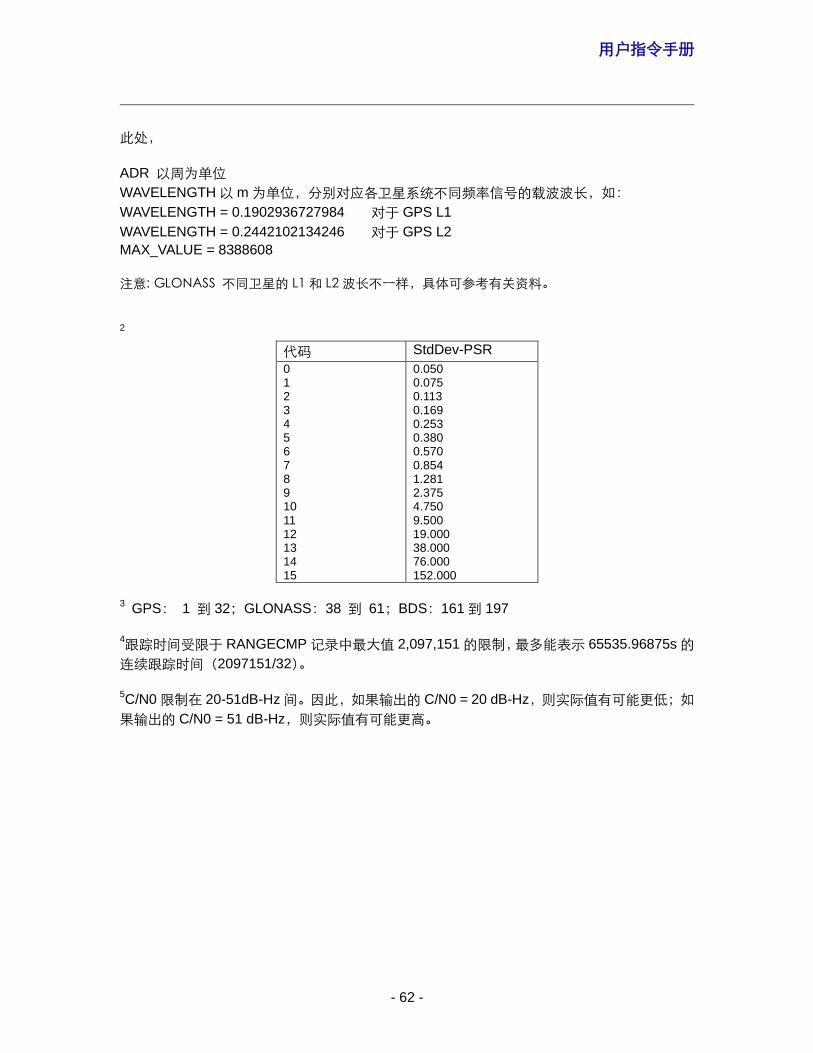
用户指令手册
- 62 -
此处,
ADR 以周为单位
WAVELENGTH 以 m 为单位,分别对应各卫星系统不同频率信号的载波波长,如:
WAVELENGTH = 0.1902936727984 对于 GPS L1
WAVELENGTH = 0.2442102134246 对于 GPS L2
MAX_VALUE = 8388608
注意: GLONASS 不同卫星的 L1 和 L2 波长不一样,具体可参考有关资料。
2
代码 StdDev-PSR
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
0.050 0.075 0.113 0.169 0.253 0.380 0.570 0.854 1.281 2.375 4.750 9.500 19.000 38.000 76.000 152.000
3 GPS: 1 到 32;GLONASS:38 到 61;BDS:161 到 197
4跟踪时间受限于 RANGECMP 记录中最大值 2,097,151 的限制,最多能表示 65535.96875s 的
连续跟踪时间(2097151/32)。
5C/N0 限制在 20-51dB-Hz 间。因此,如果输出的 C/N0 = 20 dB-Hz,则实际值有可能更低;如
果输出的 C/N0 = 51 dB-Hz,则实际值有可能更高。
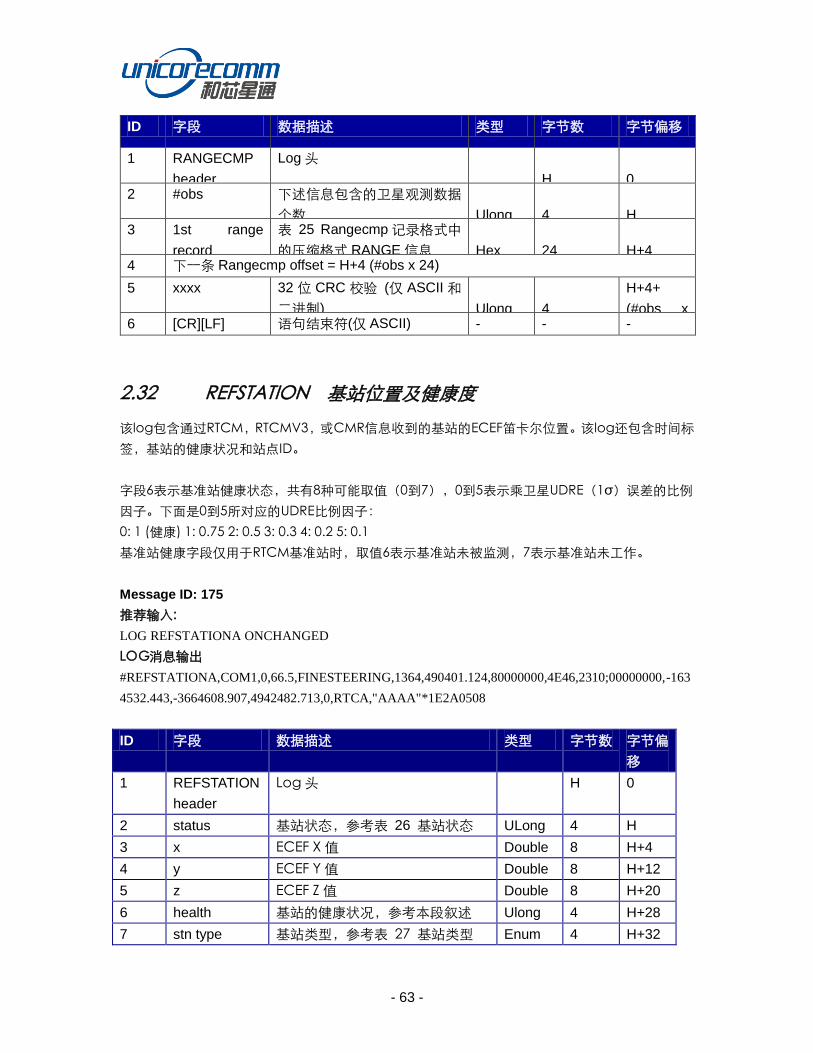
- 63 -
ID 字段 数据描述 类型 字节数 字节偏移
1 RANGECMP
header
Log 头
H
0 2 #obs 下述信息包含的卫星观测数据
个数
Ulong
4
H 3 1st range
record
表 25 Rangecmp 记录格式中
的压缩格式 RANGE 信息
Hex
24
H+4 4 下一条 Rangecmp offset = H+4 (#obs x 24)
5 xxxx 32 位 CRC 校验 (仅 ASCII 和
二进制)
Ulong
4
H+4+
(#obs x
24) 6 [CR][LF] 语句结束符(仅 ASCII) - - -
2.32 REFSTATION 基站位置及健康度
该log包含通过RTCM,RTCMV3,或CMR信息收到的基站的ECEF笛卡尔位置。该log还包含时间标
签,基站的健康状况和站点ID。
字段6表示基准站健康状态,共有8种可能取值(0到7),0到5表示乘卫星UDRE(1σ)误差的比例
因子。下面是0到5所对应的UDRE比例因子:
0: 1 (健康) 1: 0.75 2: 0.5 3: 0.3 4: 0.2 5: 0.1
基准站健康字段仅用于RTCM基准站时,取值6表示基准站未被监测,7表示基准站未工作。
Message ID: 175
推荐输入:
LOG REFSTATIONA ONCHANGED
LOG消息输出
#REFSTATIONA,COM1,0,66.5,FINESTEERING,1364,490401.124,80000000,4E46,2310;00000000,-163
4532.443,-3664608.907,4942482.713,0,RTCA,"AAAA"*1E2A0508
ID 字段 数据描述 类型 字节数 字节偏
移
1 REFSTATION
header
Log 头 H 0
2 status 基站状态,参考表 26 基站状态 ULong 4 H
3 x ECEF X 值 Double 8 H+4
4 y ECEF Y 值 Double 8 H+12
5 z ECEF Z 值 Double 8 H+20
6 health 基站的健康状况,参考本段叙述 Ulong 4 H+28
7 stn type 基站类型,参考表 27 基站类型 Enum 4 H+32

用户指令手册
- 64 -
ID 字段 数据描述 类型 字节数 字节偏
移
8 stn ID 基站 ID Char[5] 8a H+36
9 xxxx 32 位 CRC 校验 (仅 ASCII 和二进
制)
Hex 4 H+44
10 [CR][LF] 语句结束符(仅 ASCII) - - -
Field 类型 数据描述 Format 字节数 字节偏
移
表 26 基站状态
Bit # Mask 描述 Bit = 0 Bit = 1
0 0x00000001 基站有效性 有效 无效
表 27 基站类型
基站类型
(Binary)
(ASCII)
描述
0 NONE 基站未使用
1 RTCM 基站为 RTCM
2 保留 保留
3 CMR 基站为 CMR
4 RTCMV3 基站为 RTCMV3
2.33 RTCM V2 差分电文
RTCM 委员会推荐的 GNSS (Global Navigation Satellite Systems)差分信息标准Version 2,
请参见http://www.rtcm.org/overview.php。
该log输出遵循RTCM标准格式,包括1、3、18、19、31和32等电文,被定义为RTCM1,RTCM3,
RTCM18,RTCM19,RTCM31和RTCM32。
RTCM V2:
RTCM1伪距差分GPS改正数
RTCM3 GPS基准站坐标
RTCM1819 RTK未改正的载波相位和伪距观测值
RTCM24 天线参考点信息(当前仅支持解码)
RTCM31 伪距差分GLONASS改正数

- 65 -
RTCM32 GLONAS基准站坐标
推荐输入:
LOG COM2 RTCM1819 ONTIME 1
2.34 RTCM V3 差分电文
RTCM 委员会推荐的 GNSS (Global Navigation Satellite Systems)差分信息标准Version 3,
当前支持3.0和3.2的一些信息,请参见http://www.rtcm.org/overview.php。
该log输出遵循RTCM标准格式,包括1004,1006,1007,1012,1019,1033,1104等电文,
被定义为RTCM1004,RTCM1006,RTCM1007,RTCM1012,RTCM1019,RTCM1033和
RTCM1104等。
RTCM V3:
Group 1 –观测值:
RTCM1001 GPS RTK L1观测值
RTCM1002扩展的GPS RTK L1观测值
RTCM1003 GPS RTK L1和L2观测值
RTCM1004扩展的GPS RTK L1和L2观测值
RTCM1009 GLONASS RTK L1观测值
RTCM1010 扩展的GLONASS RTK L1观测值
RTCM1011GLONASS RTK L1和L2观测值
RTCM1012扩展的GLONASS RTK L1和L2观测值
RTCM1074 GPS MSM4(全部伪距、载波和CN0观测值)
RTCM1075 GPS MSM5(全部伪距、载波、多普勒和CN0观测值)
RTCM1084 GLONASS MSM4(全部伪距、载波和CN0观测值)
RTCM1085 GLONASS MSM5(全部伪距、载波、多普勒和CN0观测值)
RTCM1124 BDS MSM4(全部伪距、载波和CN0观测值)
RTCM1125 BDS MSM5(全部伪距、载波、多普勒和CN0观测值)
RTCM1104BDS RTK观测值(国内行业定义,不可与国外其他产品混用)
Group 2 –基准站坐标:
RTCM1005 RTK 基准站天线参考点坐标 (ARP)
RTCM1006 RTK基准站天线参考点坐标(含天线高)
Group 3 –基准站天线描述:

用户指令手册
- 66 -
RTCM1007 天线描述和安装信息(当前仅支持编码)
Group 4 –辅助信息:
RTCM1019 GPS星历
RTCM1020 GLONASS星历
RTCM1033接收机与天线说明
RTCM1105内部定向应用,定向端向移动基站端传送定向信息(和芯星通自定义)
推荐输入:
LOG COM2 RTCM1004 ONTIME 1
1074-1125 的 MSM 观测值信息,属于 RTCM v3.2 定义的差分电文信息,不建议与其他
RTCM v3.0 的观测值信息混用.
MS4 与 MS5 不建议混合使用,即 BDS、GPS 和 GLONASS 的观测值要么都用 MS4,要么
都用 MS5。若电台传输带宽有限,请使用 MS4.
2.35 RTKDATA RTK 解算参数
该 log 为“RTK 输出”log,包含各种与 RTK 解相关的信息。
Message ID: 215
推荐输入:
LOG RTKDATAA ONCHANGED
LOG消息输出
#RTKDATAA,COM1,0,45.0,FINE,1637,553172.000,00000000,0,0;SOL_COMPUTED,NARROW_INT,0
0000103,10,9,9,6,0,01,0,3,HNAV,0,4.3496e-05,-1.3770e-05,7.5487e-07,-1.3770e-05,9.5132e-05,6.1911e-0
5,7.5487e-07,6.1911e-05,1.0833e-04,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,3,9,6,NARROW_INT,0.
000712443,7,L1_INT,0.002354032,13,NARROW_INT,0.002983491,16,NARROW_INT,-0.001584528,19,
NARROW_INT,-0.000838759,21,L1_INT,0.003984752,23,NARROW_INT,0.002437893,31,L1_INT,-0.00
0497515,3,REFERENCE,0.000000000*4b974a71
ID 字段 数据描述 类型 字节数 字节偏
移
1 RTKDATA
header
Log 头
H 0
2 sol status 解的状态,参考表 21 解的状态 Enum 4 H
3 pos type 位置类型,参考表 20 位置或速度 Enum 4 H+4
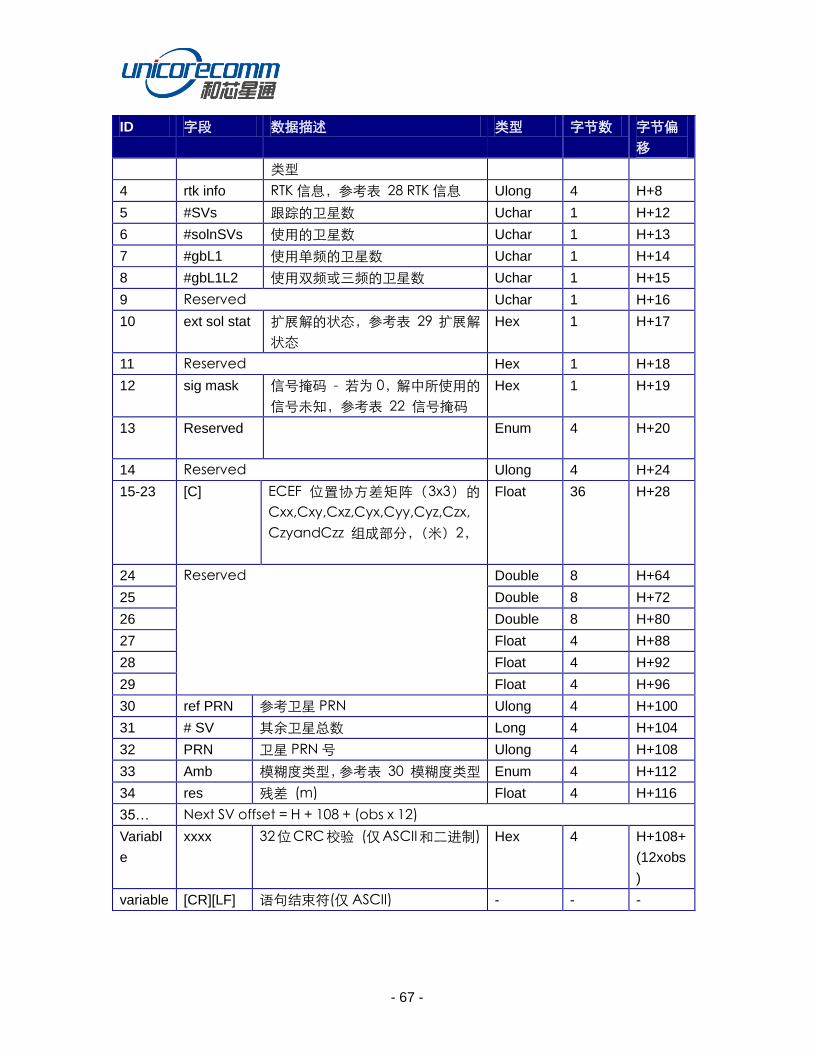
- 67 -
ID 字段 数据描述 类型 字节数 字节偏
移
类型
4 rtk info RTK 信息,参考表 28 RTK 信息 Ulong 4 H+8
5 #SVs 跟踪的卫星数 Uchar 1 H+12
6 #solnSVs 使用的卫星数 Uchar 1 H+13
7 #gbL1 使用单频的卫星数 Uchar 1 H+14
8 #gbL1L2 使用双频或三频的卫星数 Uchar 1 H+15
9 Reserved Uchar 1 H+16
10 ext sol stat 扩展解的状态,参考表 29 扩展解
状态
Hex 1 H+17
11 Reserved Hex 1 H+18
12 sig mask 信号掩码 - 若为 0,解中所使用的
信号未知,参考表 22 信号掩码
Hex 1 H+19
13 Reserved
Enum 4 H+20
14 Reserved Ulong 4 H+24
15-23 [C] ECEF 位置协方差矩阵(3x3)的
Cxx,Cxy,Cxz,Cyx,Cyy,Cyz,Czx,
CzyandCzz 组成部分,(米)2,
Float 36 H+28
24 Reserved Double 8 H+64
25 Double 8 H+72
26 Double 8 H+80
27 Float 4 H+88
28 Float 4 H+92
29 Float 4 H+96
30 ref PRN 参考卫星 PRN Ulong 4 H+100
31 # SV 其余卫星总数 Long 4 H+104
32 PRN 卫星 PRN 号 Ulong 4 H+108
33 Amb 模糊度类型,参考表 30 模糊度类型 Enum 4 H+112
34 res 残差 (m) Float 4 H+116
35… Next SV offset = H + 108 + (obs x 12)
Variabl
e
xxxx 32 位 CRC 校验 (仅 ASCII 和二进制) Hex 4 H+108+
(12xobs
)
variable [CR][LF] 语句结束符(仅 ASCII) - - -

用户指令手册
- 68 -
表 28 RTK 信息
Bit# Mask 描述 Bit = 0 Bit = 1
0 0x00000001 动态RTK Static Dynamic
1 0x00000002 RTK动态模式 Auto Forced
2 0x00000004 检测到电离层扰动剧烈 No Yes
表 29 扩展解状态
Bit Mask 描述
0 0x01 先进RTK验证
0 = 未验证
1 = 已验证
1-3 0x0E 伪距电离层改正
0 = 未知
1 = Klobuchar广播星历改正
2 = SBAS电离层格网改正
3 =多频改正
4 =伪距差分改正
表 30 模糊度类型
模糊类型 (二进制) 模糊类型(ASCII) 描述
0 UNDEFINED 未定义
1 L1_FLOAT L1浮点解
2 IONOFREE_FLOAT 消电离层浮点解
3 NARROW_FLOAT 窄巷浮点解
4 NLF_FROM_WL1 宽巷固定解导出的窄巷浮点解
5 L1_INT L1固定解
6 WIDE_INT 宽巷固定解
7 NRROW_INT 窄巷固定解
8 IONOFREE_DISCRETE 消电离层模糊度发散
9 - 10 Reserved
11 REFERENCE 双差的参考卫星(若使用GLONASS,北斗则
有三个参考卫星)。参考卫星残差总是为0.0。

- 69 -
2.36 RTKDATAH RTK 解算参数
对于单板双天线产品,该 log 为“RTK 输出”log,包含与定向端(Heading)RTK 解相关的信
息。
Message ID: 6007
LOG RTKDATAHA ONCHANGED
LOG消息输出
#RTKDATAHA,COM1,0,45.0,FINE,1637,553172.000,00000000,0,0;SOL_COMPUTED,NARROW_INT,
00000103,10,9,9,6,0,01,0,3,HNAV,0,4.3496e-05,-1.3770e-05,7.5487e-07,-1.3770e-05,9.5132e-05,6.1911e-
05,7.5487e-07,6.1911e-05,1.0833e-04,0.0000,0.0000,0.0000,0.0000,0.0000,0.0000,3,9,6,NARROW_INT,0
.000712443,7,L1_INT,0.002354032,13,NARROW_INT,0.002983491,16,NARROW_INT,-0.001584528,19
,NARROW_INT,-0.000838759,21,L1_INT,0.003984752,23,NARROW_INT,0.002437893,31,L1_INT,-0.0
00497515,3,REFERENCE,0.000000000*4b974a71
ID 字段 数据描述 类型 字节数 字节偏
移
1 RTKDATA
H header
Log 头
H 0
2 sol status 解的状态,参考表 21 解的状态 Enum 4 H
3 pos type 位置类型,参考表 20 位置或速度
类型
Enum 4 H+4
4 rtk info RTK 信息,参考表 28 RTK 信息 Ulong 4 H+8
5 #SVs 跟踪的卫星数 Uchar 1 H+12
6 #solnSVs 使用的卫星数 Uchar 1 H+13
7 #gbL1 使用单频的卫星数 Uchar 1 H+14
8 #gbL1L2 使用双频或三频的卫星数 Uchar 1 H+15
9 Reserved Uchar 1 H+16
10 ext sol stat 扩展解的状态,参考表 29 扩展解
状态
Hex 1 H+17
11 Reserved Hex 1 H+18
12 sig mask 信号掩码 - 若为 0,解中所使用的
信号未知,参考表 22 信号掩码
Hex 1 H+19
13 Reserved
Enum 4 H+20
14 Reserved Ulong 4 H+24
15-23 [C] ECEF 位置协方差矩阵(3x3)的
Cxx,Cxy,Cxz,Cyx,Cyy,Cyz,Czx,
Float 36 H+28
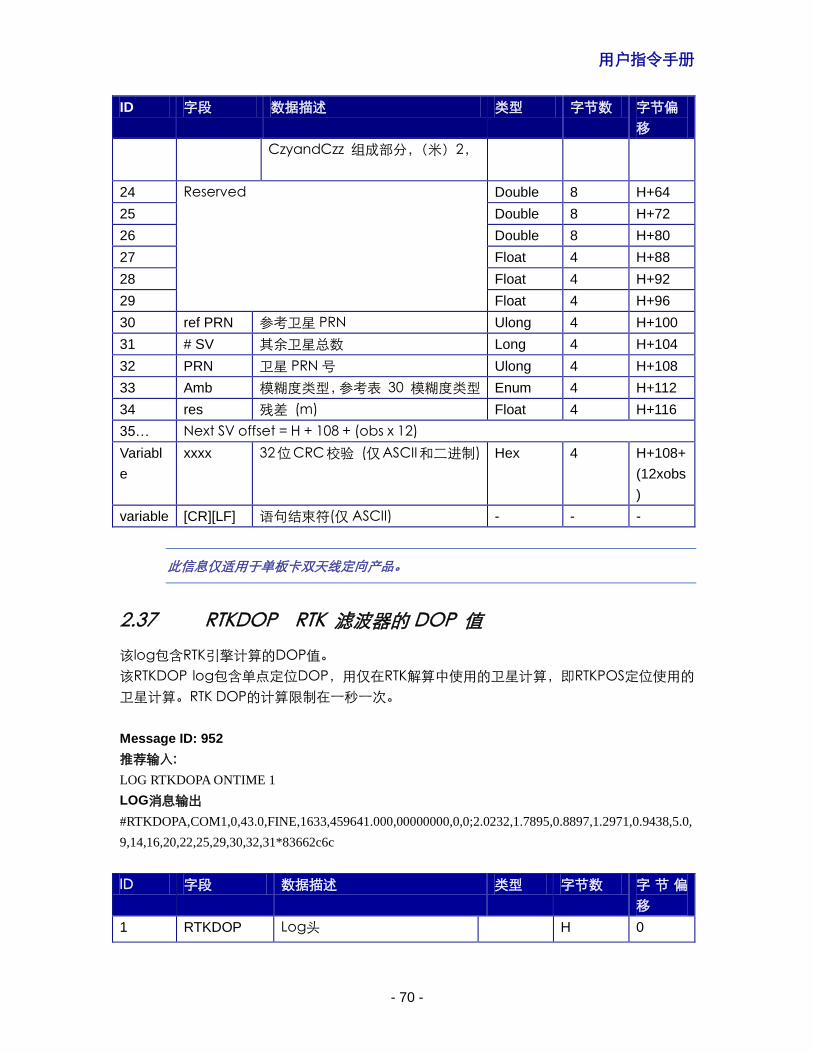
用户指令手册
- 70 -
ID 字段 数据描述 类型 字节数 字节偏
移
CzyandCzz 组成部分,(米)2,
24 Reserved Double 8 H+64
25 Double 8 H+72
26 Double 8 H+80
27 Float 4 H+88
28 Float 4 H+92
29 Float 4 H+96
30 ref PRN 参考卫星 PRN Ulong 4 H+100
31 # SV 其余卫星总数 Long 4 H+104
32 PRN 卫星 PRN 号 Ulong 4 H+108
33 Amb 模糊度类型,参考表 30 模糊度类型 Enum 4 H+112
34 res 残差 (m) Float 4 H+116
35… Next SV offset = H + 108 + (obs x 12)
Variabl
e
xxxx 32 位 CRC 校验 (仅 ASCII 和二进制) Hex 4 H+108+
(12xobs
)
variable [CR][LF] 语句结束符(仅 ASCII) - - -
此信息仅适用于单板卡双天线定向产品。
2.37 RTKDOP RTK 滤波器的 DOP 值
该log包含RTK引擎计算的DOP值。
该RTKDOP log包含单点定位DOP,用仅在RTK解算中使用的卫星计算,即RTKPOS定位使用的
卫星计算。RTK DOP的计算限制在一秒一次。
Message ID: 952
推荐输入:
LOG RTKDOPA ONTIME 1
LOG消息输出
#RTKDOPA,COM1,0,43.0,FINE,1633,459641.000,00000000,0,0;2.0232,1.7895,0.8897,1.2971,0.9438,5.0,
9,14,16,20,22,25,29,30,32,31*83662c6c
ID 字段 数据描述 类型 字节数 字 节 偏
移
1 RTKDOP Log头 H 0

- 71 -
ID 字段 数据描述 类型 字节数 字 节 偏
移
header
2 GDOP 几何DOP
Float 4 H
3 PDOP 位置DOP Float 4 H+4
4 HDOP 水平DOP Float 4 H+8
5 HTDOP 水平和时间DOP Float 4 H+12
6 TDOP 时间DOP Float 4 H+16
7 elev mask 截止高度角 Float 4 H+20
8 #sats 计算所用的卫星总数 Ulong 4 H+24
9 sats 计算时使用的卫星 Ulong[#s
ats]
4x(#sats) H+28
10 xxxx 32位CRC校验 (仅ASCII和二
进制)
Hex 4 variable
11 [CR][LF] 语句结束符(仅ASCII) - - -
2.38 RTKPOS RTK 低延迟定位数据
该log包含接收机计算的低延迟RTK位置信息,并带有两个状态标志。此外,还给出其他状态指
示,包括差分龄期,这对预测由差分改正信息中断导致的异常情况很有用。该log推荐在动态模
式下使用,静态模式下要获取更好的精度可用MATCHEDPOS。
在RTK模式下,该log反映低延迟定位结果是否有效(外推基准站观测值)。有效的低延迟解可
在接收到最后一组基站观测值起推算至第60s。
Message ID: 141
推荐输入:
LOG RTKPOSA ONTIME 1
LOG消息输出
#RTKPOSA,COM1,0,95.0,FINE,1623,113864.000,00000000,0,0;SOL_COMPUTED,NARROW_INT,40.0
3693414126,116.30175020528,55.1119,0.0000,WGS84,0.0162,0.0146,0.0554,"0",1.000,0.000,8,7,7,5,0,1,0
,3*9eeebab7
ID 字段 数据描述 类型 字节数 字 节 偏
移
1 RTKPO
S
Log 头 H 0

用户指令手册
- 72 -
ID 字段 数据描述 类型 字节数 字 节 偏
移
header
2 sol
status
解算状态,参考表 21 解的状态 Enum 4 H
3 pos type 位置类型,参考表 20 位置或速度类型 Enum 4 H+4
4 lat 纬度 Double 8 H+8
5 lon 经度 Double 8 H+16
6 hgt 海拔高 Double 8 H+24
7 undulati
on
大 地 水 准 面 差 距 - 大 地 水 准 面 和
WGS84 椭球面之间的关系(米)
Float 4 H+32
8 datum
id#
坐标系 ID,当前仅支持 WGS84,ID:
WE
Enum 4 H+36
9 lat σ 纬度标准差 Float 4 H+40
10 lon σ 经度标准差 Float 4 H+44
11 hgt σ 高度标准差 Float 4 H+48
12 stn id 基站 ID Char[4] 4 H+52
13 diff_age 差分龄期,秒 Float 4 H+56
14 sol_age 解的龄期,秒 Float 4 H+60
15 #SVs 跟踪的卫星数 Uchar 1 H+64
16 #solnSV
s
使用的卫星数 Uchar 1 H+65
17 Reserved
Uchar 1 H+66
18 Uchar 1 H+67
19 Uchar 1 H+68
20 Hex 1 H+69
21 Hex 1 H+70
22 sig mask 信号掩码,参考表 22 信号掩码 Hex 1 H+71
23 xxxx 32 位 CRC 校验 (仅 ASCII 和二进制) Hex 4 H+72
24 [CR][LF] 语句结束符(仅 ASCII) - - -
2.39 RTKVEL RTK 速度
此log包含接收机计算的 RTK 速度信息。此外,还给出其他状态指示,包括差分龄期,这对预
测由差分改正信息中断导致的异常情况很有用。速度测量精度有时与其输出延迟有关。有效时
间是log中的时间标记减去时间延迟。
Message ID: 216
推荐输入:
LOG RTKVELA ONTIME 1

- 73 -
LOG消息输出
#RTKVELA,COM1,0,43.5,FINESTEERING,1364,496137.000,00100000,71E2,2310;SOL_COMPU
TED,NARROW_INT,0.250,1.000,0.0027,207.645811,0.0104,0.0*F551CC42
ID 字段 数据描述 类型 字节数 字节偏
移
1 RTKVEL
header
Log头
H 0
2 sol status 解的状态,参考表 21 解的状态 Enum 4 H
3 vel type 速度类型,参考表 20 位置或速度类型 Enum 4 H+4
4 latency 根据速度时标计算的延迟值,以秒为单位。用
历元时间减去延迟可得到更准确的速度结果。
Float 4 H+8
5 age 差分龄期,秒 Float 4 H+12
6 horspd 对地水平速度,米每秒 Double 8 H+16
7 trkgnd 相对于真北的实际对地运动方向(相对地面轨
迹),度
Double 8 H+24
8 vertspd 垂直速度,米/秒,正值表示高度增加(向上),
负值表示高度下降(向下)
Double 8 H+32
9 Reserved Float 4 H+40
10 xxxx 32位CRC校验 (仅ASCII和二进制) Hex 4 H+44
11 [CR][LF] 语句结束符(仅ASCII) - - -
2.40 SATVIS 可见卫星
该log包含可见卫星列表及卫星信息。
Message ID: 48
推荐输入:
LOG SATVISA ONTIME 1
LOG消息输出
#SATVISA,COM1,0,48.0,FINE,1640,371048.000,00000000,e,0;TRUE,TRUE,17,3,0,0,41.190685,186.419
877,0.000000,0.000000,6,0,0,51.706690,165.885610,0.000000,0.000000,13,0,0,26.893453,316.113012,0.0
00000,0.000000,16,0,0,75.204078,300.760386,0.000000,0.000000,19,0,0,11.127860,191.716156,0.000000
,0.000000,20,0,0,8.409325,246.694548,0.000000,0.000000,21,0,0,7.988951,85.878864,0.000000,0.000000
,23,0,0,53.522298,289.143272,0.000000,0.000000,29,0,0,7.220252,36.064232,0.000000,0.000000,30,0,0,6
5.566387,32.858640,0.000000,0.000000,31,0,0,38.664195,98.451945,0.000000,0.000000,32,0,0,8.823622,
223.616555,0.000000,0.000000,161,0,0,35.879199,139.716082,0.000000,0.000000,163,0,0,33.788116,225

用户指令手册
- 74 -
.567557,0.000000,0.000000,164,0,0,26.012868,124.030921,0.000000,0.000000,167,0,0,65.324708,143.22
1076,0.000000,0.000000,168,0,0,70.829717,216.400078,0.000000,0.000000*50e17350
ID 字段 数据描述 类型 字节数 字节偏
移
1 SATVIS
header
Log头 H 0
2 sat vis 卫星是否可视,0 = FALSE 1 = TRUE Enum 4 H
3 comp alm 是否使用了北斗/GPS/GLONASS完整星
历,0 = FALSE 1 = TRUE
Enum 4 H+4
4 #sat 有数据的卫星数 Ulong 4 H+8
5 PRN/slot 卫星PRN号 (GPS: 1到32, GLONASS:
38到61,北斗:161 到197)
Short 2 H+12
6 glofreq (GLONASS 频率+ 7), GPS 和北斗未用
Short 2 H+14
7 health 卫星健康 Ulong 4 H+16
8 elev 仰角(度) Double 8 H+20
9 az 方位角 (度) Double 8 H+28
10 true dop 卫星多普勒理论值-基于卫星相对于接收
机的运动得出的预期多普勒频率。它是通
过卫星的坐标和速度,及接收机的坐标和
速度计算的。(Hz)
Double 8 H+36
11 app dop 该接收机的真实多普勒– 与上面的理论
多普勒相似,但增加了钟差改正(Hz)
Double 8 H+44
12 下一卫星偏移= H + 12 + (#sat x 40)
variable xxxx 32位CRC校验 (仅ASCII和二进制) Hex 4 H+12+
(#sat x
40)
variable [CR][LF] 语句结束符(仅ASCII) - - -
2.41 TIME 时间信息
此log提供了几个时间相关的信息包括接收机钟差和 UTC 时间和偏差等。
Message ID: 101
推荐输入:
LOG TIMEA ONTIME 1

- 75 -
LOG消息输出
#TIMEA,COM1,0,47.0,FINE,1640,371112.000,00000000,e,0;VALID,-0.000258012,0.000000010,-15.000
00000000,2011,6,16,7,4,57000,VALID*c4de1976
ID 字段 数据描述 类型 字节数 字节偏
移
1 TIME
header
Log 头
H 0
2 clock
status
时钟模式(不包括当前测量数据)
暂不支持
Enum 4 H
3 offset 相对于GPS时的接收机钟差,以秒为单位。正
值意味着接收机时钟早于GPS 时间。要得出
GPS 的时间,请使用下面的公式: GPS 时间
= 接收机时间-钟差
Double 8 H+4
4 offset
std
接收机钟差的标准偏差。
Double 8 H+12
5 utc
offset
GPS 时间到UTC 时间的偏差,通过历书参数
计算。UTC时间为GPS 的时间加上当前的
UTC 偏差加上接收机钟差: UTC 时间 = GPS
时间 + 钟差 + UTC 偏差
Double 8 H+20
6 utc year UTC 年 Ulong 4 H+28
7 utc
month
UTC月 (0-12) a Uchar 1 H+32
8 utc day UTC天 (0-31) a Uchar 1 H+33
9 utc hour UTC小时 (0-23) Uchar 1 H+34
10 utc min UTC分钟 (0-59) Uchar 1 H+35
11 utc ms UTC 毫秒 (0-60999) b Ulong 4 H+36
12 utc
status
UTC 状态:0 = 无效 1 = 有效 2 = 警告c Enum 4 H+40
13 xxxx 32位CRC校验 (仅ASCII和二进制) Hex 4 H+44
14 [CR][LF] 语句结束符(仅ASCII) - - -
a. 如果UTC 时间未知,月和日的值均为0
b. 使用闰秒时最大值为60999
c. 指示由于缺少年历,采用闰秒值

用户指令手册
- 76 -
2.42 VERSION 版本信息
此log 包含接收机的产品名称、功能授权、序列号、硬件版本、固件版本等信息。
Message ID: 37
推荐输入:
LOG VERSIONA ONCE
LOG 消息输出:
#VERSIONA,ICOM4,0,86.0,FINE,1811,123967.000,00000000,000e,0;1,ENCLOSURE,"B123G125R12E0-HMRBDP
1010-S100-P100-L:2015-6-28","080101001800-562001133200003","UB370-3.02","R4.00Build3.10722","none","",""
*26c637b9
ID 字段 数据描述 类型 字节数 字节偏移
1 VERSION
header
Log 头 H 0
2 # comp 接收机或板卡等信息数目 Long 4 H
3 type 产品类型
0 = UNKNOWN
1 = GPSCARD
2 = CONTROLLER(暂不支
持)
3 = ENCLOSURE
7 = IMUCARD(暂不支持)
Enum 4 H+4
4 model 有效的型号名,当授权码过期
显示无效 Char[129]
129 H+8
5 psn 产品 PN 号和序列号,“-”前为
PN 号,后为 SN 号
Char[66] 66 H+137
6 hw version 硬件版本 Char[33] 33 H+203
7 sw version 固件版本 Char[33] 33 H+236
8 boot
version
Boot 和 BB 版本 Char[33] 33 H+269
9 保留 保留 Char[33] 33 H+302
10 comp time 固件编译日期和时间 Char[33] 33 H+335
11... 下一组接收机或板卡等信息字节偏移 H+4+(#comp*364)
variable xxxx 32 位 CRC 校验 (仅 ASCII 或
二进制)
Hex
variable [CR][LF] 语句结束符(仅 ASCII) -

- 77 -
注:当前“产品类型”仅支持 ENCLOSURE、BOARD 两种类型;
Mode 信息代表接收机支持的功能选项,分为四部分,分别是:信号类型-PVT 选项-输
出率-授权时间。
信号类型:以 B、G、R、E 和 S 开头,字母后面的数字表示频点,0 代表不支持该系统;
PVT 选项:以字母和数字组合表示接收机所具备的基准站、流动站、定向等不同 PVT
功能;
输出率:表示接收机所具备的原始观测数据和 PVT 的输出率,显示信息依赖于特定板
卡和相应授权码
授权时间:接收机时间大于授权时间即只能工作于单频模式,仅输出 1Hz 的 GGA 信息。
授权时间大于当前时间 100 年以上,接收机即为永久授权。
BDS GPS GLONASS Galileo SBAS/L-band
B0 不可用 G0 不可用 R0 不可用 E0 不可用 S0 不可用
B1 B1 G1 L1 R1 G1 E1 E1 S1 SBAS
B12 B1, B2 G12 L1, L2 R12 G1, G2 E15a E1, E5a SL SBAS,
L
B123 B1,
B2, B3 G125
L1, L2,
L5 保留
E15a5
b
E1,
E5a,
E5b
保留
B13 B1,B3 保留 保留 保留 保留
定位模式 动态范围 高度范围 PPS Event
H Heading 0 515m/
s 0
18000
m 0 不支持 0 不支持
R RTK
Fixed 3
No
limit. 3
No
limit. 1 可用 1 可用
B
RTK
TX,
DGPS
TX
S Single

用户指令手册
- 78 -
P PPP
U 保留
M Moving
Base
D DGPS
Rx
原始观测数据输出率 位置速度输出率
S0 P1000
1000 1Hz 1000 1Hz
200 5Hz 200 5Hz
100 10Hz 100 10Hz
50 20Hz 50 20Hz
保留 保留
保留 保留
0 不输出 0 不输出
2.43 通过相关命令查询接收机设置
下面的 LOG 后面跟随下述命令,可显示命令的当前参数,所有参数与其相应的命令格式一致。
如:
LOG ECUTOFF
ECUTOFF
BD2ECUTOFF
FIX
INTERFACEMODE
NETCONFIG
DATASERVERCONFIG
NETPORTCONFIG
NETUPLOAD
ANTENNAPOWER
PPSCONFIG
3. 接收机默认配置
接收机工厂设置:
ANTENNAPOWER ON
ECUTOFF BD2 5.0
ECUTOFF GPS 5.0
ECUTOFF GLONASS 5.0

- 79 -
CLOCKSWITCH disable
COM COM1 115200
COM COM2 115200
COM COM3 115200
FIX NONE
INTERFACEMODE COM1 UNICORE UNICORE ON
INTERFACEMODE COM2 UNICORE UNICORE ON
INTERFACEMODE COM3 UNICORE UNICORE ON
NETUPLOAD 30 30
PPSCONFIG GPS enable NEGATIVE 1000 0 0 0

用户指令手册
- 80 -
4. 32 位 CRC 校验
ASCII 和二进制格式的 log 消息都包含 32 位 CRC 校验, 以进一步确保数据 的发送和接收。下
面提供生成 CRC 校验位的 C 语言示例:
#define CRC32_POLYNOMIAL 0xEDB88320L
/* --------------------------------------------------------------------------
Calculate a CRC value to be used by CRC calculation functions.
-------------------------------------------------------------------------- */
unsigned long CRC32Value(int i)
{
int j;
unsigned long ulCRC;
ulCRC = i;
for ( j = 8 ; j > 0; j-- )
{
if ( ulCRC & 1 )
ulCRC = ( ulCRC >> 1 ) ^ CRC32_POLYNOMIAL;
else
ulCRC >>= 1;
}
return ulCRC;
}
/* --------------------------------------------------------------------------
Calculates the CRC-32 of a block of data all at once
-------------------------------------------------------------------------- */
unsigned long CalculateBlockCRC32(
unsigned long ulCount, /* Number of bytes in the data block */
unsigned char *ucBuffer ) /* Data block */
{
unsigned long ulTemp1;
unsigned long ulTemp2;
unsigned long ulCRC = 0;
while ( ulCount-- != 0 )

- 81 -
{
ulTemp1 = ( ulCRC >> 8 ) & 0x00FFFFFFL;
ulTemp2 = CRC32Value( ((int) ulCRC ^ *ucBuffer++ ) & 0xff );
ulCRC = ulTemp1 ^ ulTemp2;
}
return( ulCRC );
}
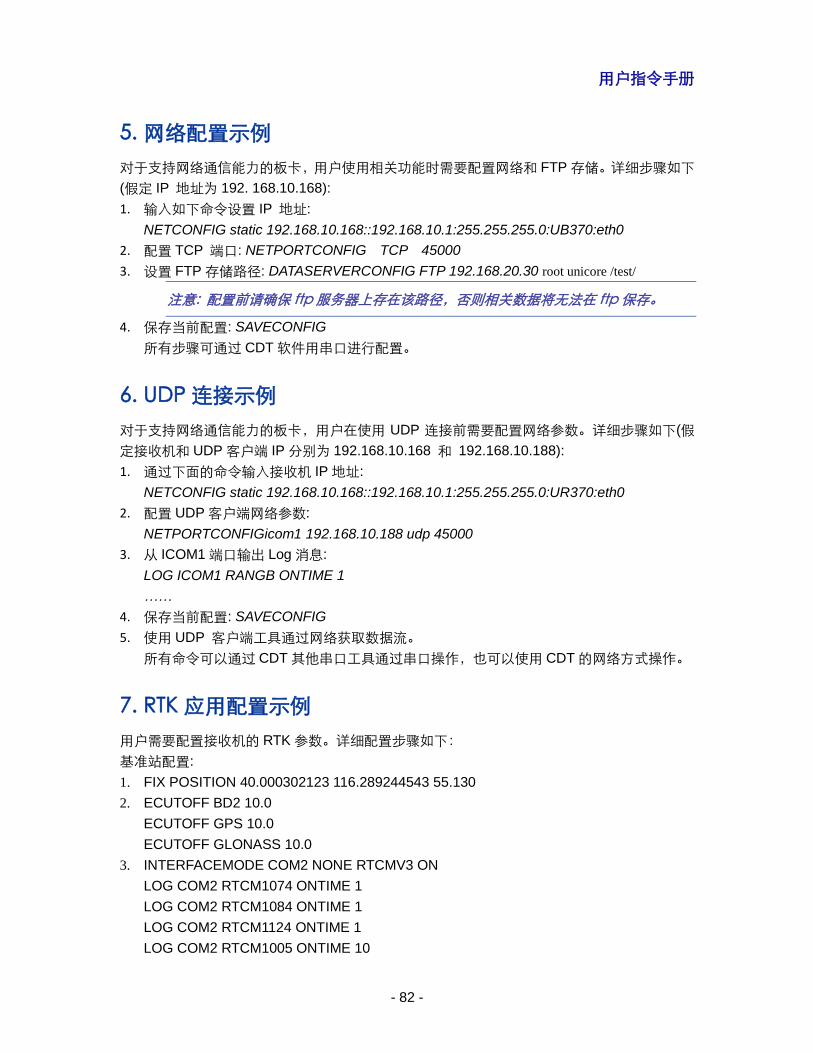
用户指令手册
- 82 -
5. 网络配置示例
对于支持网络通信能力的板卡,用户使用相关功能时需要配置网络和 FTP 存储。详细步骤如下
(假定 IP 地址为 192. 168.10.168):
1. 输入如下命令设置 IP 地址:
NETCONFIG static 192.168.10.168::192.168.10.1:255.255.255.0:UB370:eth0
2. 配置 TCP 端口: NETPORTCONFIG TCP 45000
3. 设置 FTP 存储路径: DATASERVERCONFIG FTP 192.168.20.30 root unicore /test/
注意: 配置前请确保 ftp 服务器上存在该路径,否则相关数据将无法在 ftp 保存。
4. 保存当前配置: SAVECONFIG
所有步骤可通过 CDT 软件用串口进行配置。
6. UDP 连接示例
对于支持网络通信能力的板卡,用户在使用 UDP 连接前需要配置网络参数。详细步骤如下(假
定接收机和 UDP 客户端 IP 分别为 192.168.10.168 和 192.168.10.188):
1. 通过下面的命令输入接收机 IP 地址:
NETCONFIG static 192.168.10.168::192.168.10.1:255.255.255.0:UR370:eth0
2. 配置 UDP 客户端网络参数:
NETPORTCONFIGicom1 192.168.10.188 udp 45000
3. 从 ICOM1 端口输出 Log 消息:
LOG ICOM1 RANGB ONTIME 1
……
4. 保存当前配置: SAVECONFIG
5. 使用 UDP 客户端工具通过网络获取数据流。
所有命令可以通过 CDT 其他串口工具通过串口操作,也可以使用 CDT 的网络方式操作。
7. RTK 应用配置示例
用户需要配置接收机的 RTK 参数。详细配置步骤如下:
基准站配置:
1. FIX POSITION 40.000302123 116.289244543 55.130
2. ECUTOFF BD2 10.0
ECUTOFF GPS 10.0
ECUTOFF GLONASS 10.0
3. INTERFACEMODE COM2 NONE RTCMV3 ON
LOG COM2 RTCM1074 ONTIME 1
LOG COM2 RTCM1084 ONTIME 1
LOG COM2 RTCM1124 ONTIME 1
LOG COM2 RTCM1005 ONTIME 10

- 83 -
4. SAVECONFIG
流动站配置:
1. INTERFACEMODE COM2 RTCMV3 NONE ON
2. SAVECONFIG
8. 定向应用配置实例
a) 双板卡定向应用的详细配置步骤如下:
基准站配置:
同 RTK 应用基站配置。
移动基站端配置,假设 COM2 用于接收来自基准站的差分电文,COM3 用于输出给定向端的信
息,默认 5Hz(定向端航向信息计算频率与移动基站端输出的差分电文信息频率一致)。
1. INTERFACEMODE COM2 RTCMV3 NONE ON
2. COM COM3 230400
3. MOVINGBASESTATION ENABLE
4. INTERFACEMODE COM3 NONE RTCMV3 ON
LOG COM3 RTCM1074 ONTIME 0.2
LOG COM3 RTCM1084 ONTIME 0.2
LOG COM3 RTCM1124 ONTIME 0.2
LOG COM3 RTCM1005 ONTIME 0.2
5. SAVECONFIG
定向端配置,假设 COM3 用于接收来自移动基站端的信息。
1. HEADING ENABLE
2. COM COM3 230400
3. INTERFACEMODE COM3 RTCMV3 NONE ON
4. SAVECONFIG
若需要在移动基站端输出定向端的定向信息,可修改定向端配置为:
1. HEADING ENABLE
2. COM COM3 230400
3. INTERFACEMODE COM3 RTCMV3 RTCMV3 ON
4. LOG COM3 RTCM1105 ONTIME 0.2
5. SAVECONFIG
此外,在移动基站端请求:

用户指令手册
- 84 -
LOG HEADINGA ONCHANGED
b) 单板双天线定向应用的详细配置步骤如下:
基准站配置:
同 RTK 应用基站配置。
定向端(单板双天线接收机)配置:
1. INTERFACEMODE COM2 RTCMV3 NONE ON
2. SAVECONFIG

www.unicorecomm.com
和芯星通科技(北京)有限公司
Unicore Communications, Inc.
www.unicorecomm.com
Phone: 86-10-69939800
Fax: 86-10-69939888
北京市海淀区丰贤东路7号北斗星通大厦三层F3, No.7, Fengxian East Road, Haidian, Beijing, P.R.China,100094



![指令 2002/58/EC [参考訳・改訂版]cyberlaw.la.coocan.jp/Documents/EU_ePrivacyDirective.pdf指令2002/58/EC [参考訳・改訂版] 2017年5月23日 明治大学法学部教授](https://img.pdfslide.tips/doc/110x75/6042b244fbcd3335934c10cd/oe-200258ec-efefec-oe200258ec-efefec.jpg)

























