Embed Size (px)
Citation preview

Multiobjective Shape Optimization of Latticed Shells for Elastic Stiffness andLatticed Shells for Elastic Stiffness and Uniform Member Lengths
Makoto Ohsaki (Hiroshima University)
Shinnnosuke Fujita (Kanebako Struct. Eng.)

Background:Optimization of Shell Roofs
Structural performance Minimum strain energy+
Cost performancePerformance measures:weight, volume, etc.
Constraints
Cost performanceMaterial cost, etc.
(Formulation is straightforward)
Aesthetic aspectRoundness, convexity,
Algebraic invariants of tensor algebra for
Constructability
Roundness, convexity, planeness, etc.
tensor algebra for differential geometry
yDevelopable surface → Reduce cost for scaffolding

Shape representation using Bezier surface
Tensor product Be’zier surface
B : Bernstein basis functionB : Bernstein basis function
j
Tensor product Be’zier surface of order 3 ii

Shape representation using Bezier surface
Triangular patch Bezier surface
ex). Triangular Bezier patch of order 4
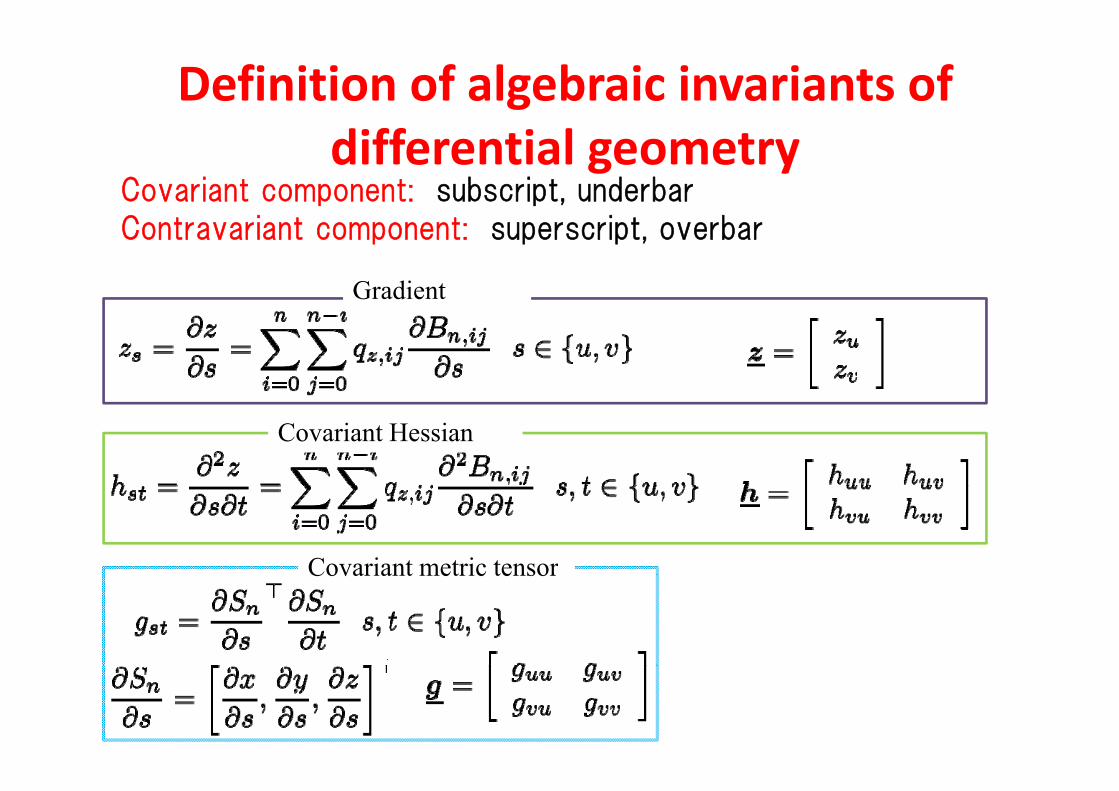
Definition of algebraic invariants of
Covariant component: subscript, underbarC i i b
differential geometryContravariant component: superscript, overbar
Gradient
Covariant Hessian
Covariant metric tensor
55
Covariant metric tensor
55

Definitions of algebraic invariants of
β1 : twice the mean curvature
differential geometryβ invariants
β1 : twice the mean curvature
β2 : the Gaussian curvature
γ1/ β0 : the curvature in the
steepest descent direction
γ3/ β0 : the curvature in the γ invariants
γ3/ β0 : t e cu vatu e t e
direction perpendicular to
the steepest descent the steepest descent
direction
: roundness measure

Relation between the invariants and surface shape
Local Local properties in the neighborhood of a point P on the surface are characterized by properties in the neighborhood of a point P on the surface are characterized by h i i f llh i i f ll
The contours in the neighbourhood of P are coaxial (part of) similar ellipses.
the invariants as follows:the invariants as follows:
The shape is locally concave (example : )The shape is locally convex. (example : )The shape is locally concave. (example : )
Th t i th i hb h d f P ( t f) i l h b l ( l )The contours in the neighbourhood of P are (part of) coaxial hyperbolas. (example : )
P is a critical point. (example : ) p ( p )

Relation between the invariants and surface shape
One of the principal curvatures is 0.The other principal curvature is positive. (example : )The other principal curvature is negative (example : )The other principal curvature is negative. (example : )
The shape is locally flat surface. (example : )

Relation between the invariants d f hand surface shape
Direction of gradient vector coincides with one of the principal direction,
and concave in one principal direction (example : )
Direction of gradient vector coincides with one of the principal direction, and the surface near P is locally cylindrical
>
and convex in one principal direction (example : ) <
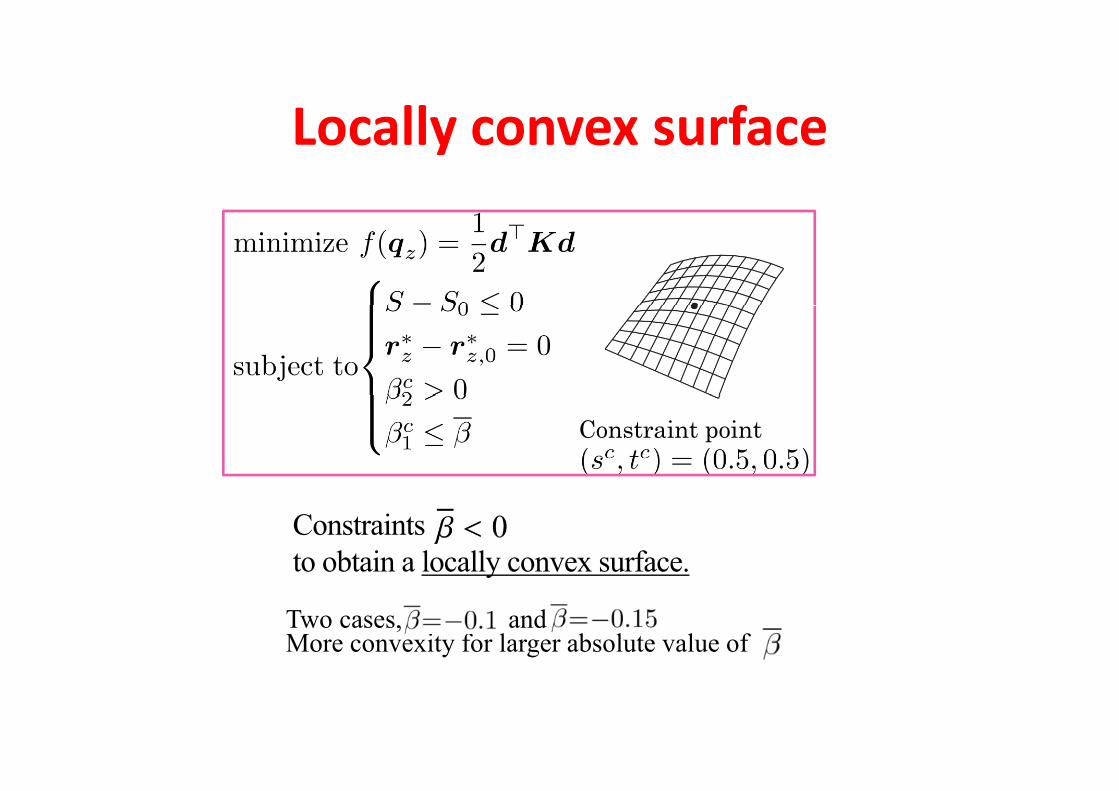
Locally convex surfaceLocally convex surface
Constraint point
Constraints to obtain a locally convex surface.
Two cases, and More convexity for larger absolute value of
y

Initial shape
-6
-4
-2
0 6
5.5 5
4.5 4
3 5
-14 -12 -10 -8 -6 -4 -2 0
-14
-12
-10
-8 3.5 3
2.5 2
1.5 1
0.5
St i 21 125 Max bending stress :7 9380
Max.compressive stress :7.1183Max.tensile stress :3.0838Max.vertical
disp :44 199Optimum shape( )
-4
-2
0 7 6.5 6
5.5 5
4 5
Strain energy:21.125 Max.bending stress :7.9380disp.:44.199
14 12 10 8 6 4 2 0
-14
-12
-10
-8
-6 4.5 4
3.5 3
2.5 2
1.5 1
0.5 0
-0.5Max.vertical
Max.compressive stress :3.0681Max.tensile stress :0.2700
Optimum shape( )
-14 -12 -10 -8 -6 -4 -2 0
-2
0 6.5 6
5.5
Strain energy:1.8313 disp.:3.4742 Max.bending stress :0.5567
-12
-10
-8
-6
-4 5 4.5 4
3.5 3
2.5 2
1.5 1
0.5Max verticalMax.compressive stress :3.1871
-14 -12 -10 -8 -6 -4 -2 0
-14 0.5 0
-0.5
Strain energy:2.9603
Max.verticaldisp.:5.4138 Max.bending stress :1.1442
Max.tensile stress :0.3651
Contour line
Locally convex surface with large stiffness

Locally cylindrical surfacey y
Constraint pointsConstraint points
Constraintsto obtain locally cylindrical and
fconvex surface.Two cases, and 0.025 More cylindricity and convexity for larger y y y gabsolute value
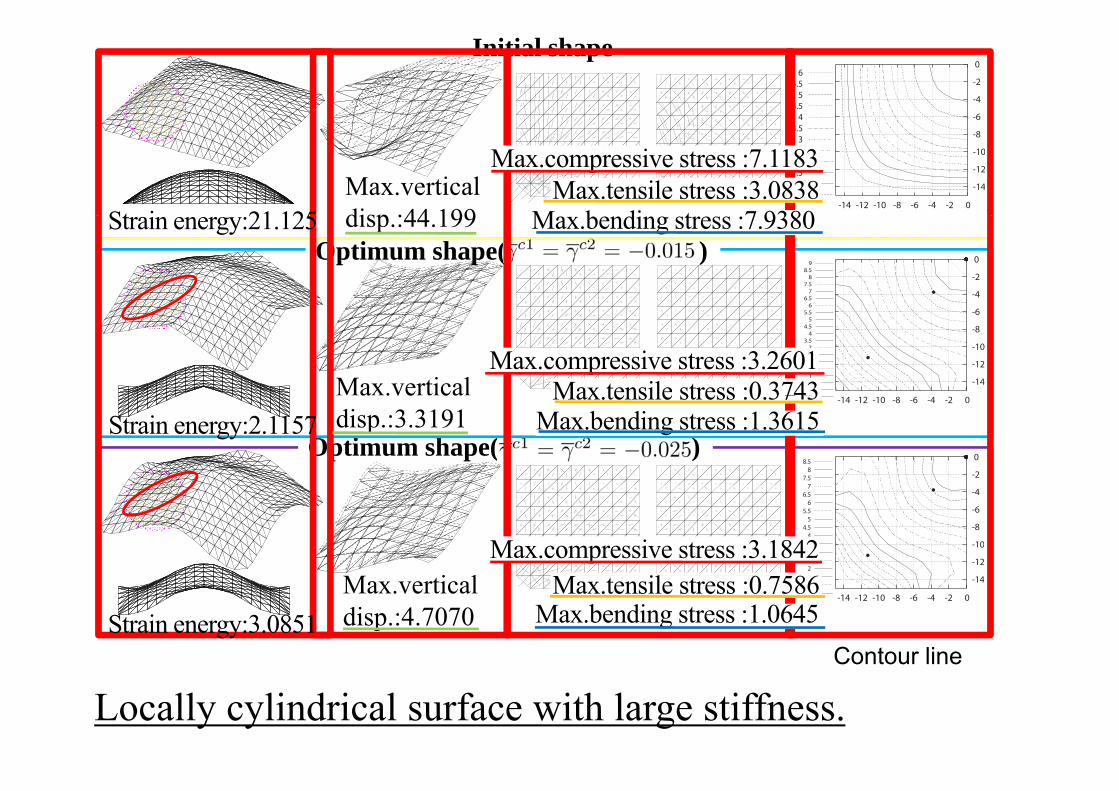
Initial shape
-6
-4
-2
0 6
5.5 5
4.5 4
3 5
-14 -12 -10 -8 -6 -4 -2 0
-14
-12
-10
-8 3.5 3
2.5 2
1.5 1
0.5
St i 21 125 M b di t 7 9380
Max.compressive stress :7.1183Max.tensile stress :3.0838Max.vertical
disp :44 199Optimum shape( )
9 8.5 8
7.5 7
6.56
-4
-2
0
Strain energy:21.125 Max.bending stress :7.9380disp.:44.199
6 5.5 5
4.5 4
3.5 3
2.5 2
1.5 1
0.5 0
0 5
-14
-12
-10
-8
-6
Max.compressive stress :3.2601Max tensile stress :0 3743Max.vertical
Optimum shape( )
-0.5 -14 -12 -10 -8 -6 -4 -2 0
8.5 8
7.57
-2
0
Strain energy:2.1157 Max.bending stress :1.3615Max.tensile stress :0.3743a .ve ca
disp.:3.3191
7 6.5 6
5.5 5
4.5 4
3.5 3
2.5 2
1 5
-12
-10
-8
-6
-4
Max.compressive stress :3.1842ili l 1.5
1 0.5 -14 -12 -10 -8 -6 -4 -2 0
-14
Strain energy:3.0851 Max.bending stress :1.0645Max.tensile stress :0.7586Max.vertical
disp.:4.7070Contour line
Locally cylindrical surface with large stiffness.
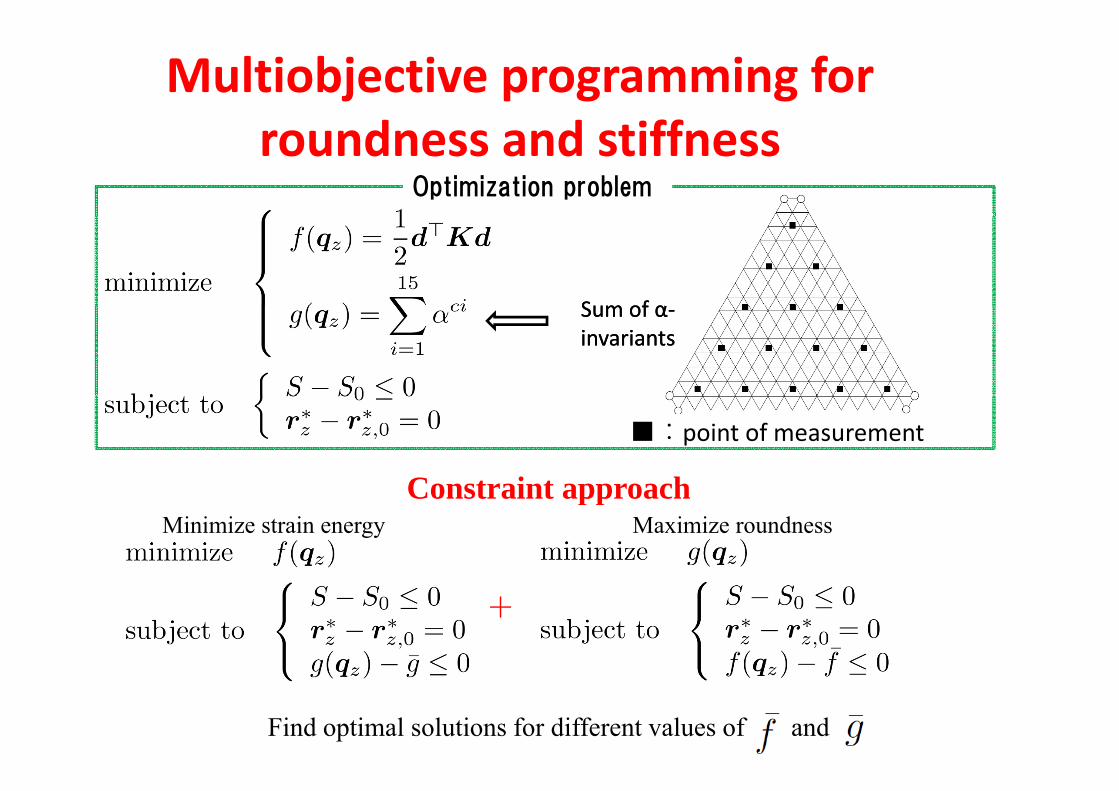
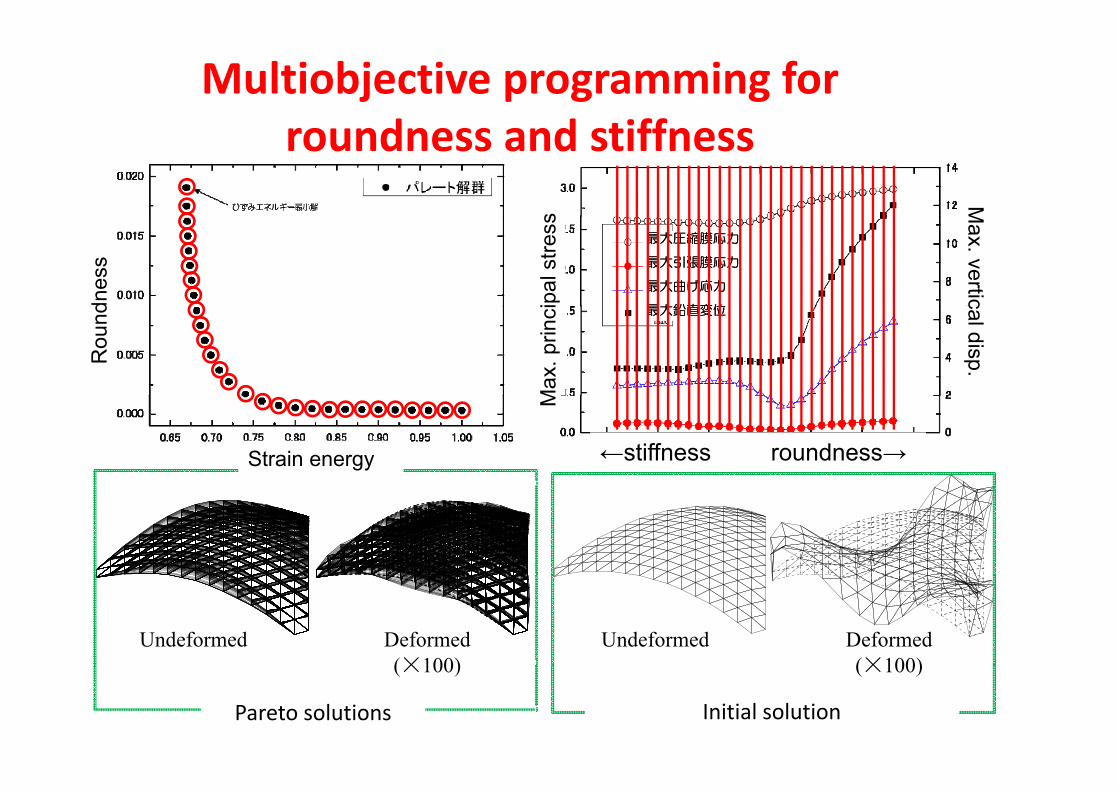
Multiobjective programming for d d tiff
Optimization problem
roundness and stiffness
Sum of αSum of αSum of αSum of α‐‐invariantsinvariants
■:point of measurement
Constraint approachConstraint approachMinimize strain energy Maximize roundness
1414
+
1414
Find optimal solutions for different values of and
Multiobjective programming for d d tiff
s
Mroundness and stiffness
最大圧縮膜応力最大圧縮膜応力
最大引張膜応力最大引張膜応力
最大曲げ応力最大曲げ応力
最大鉛直変位最大鉛直変位dnes
s
ipal
stre
ss
Max. vertic
最大鉛直変位最大鉛直変位
Rou
nd
Max
. prin
ci
cal disp.
Strain energy
M
←stiffness roundness→
1515Deformed(×100)
Undeformed Deformed(×100)
Undeformed1515(×100)(×100)
Initial solutionPareto solutions
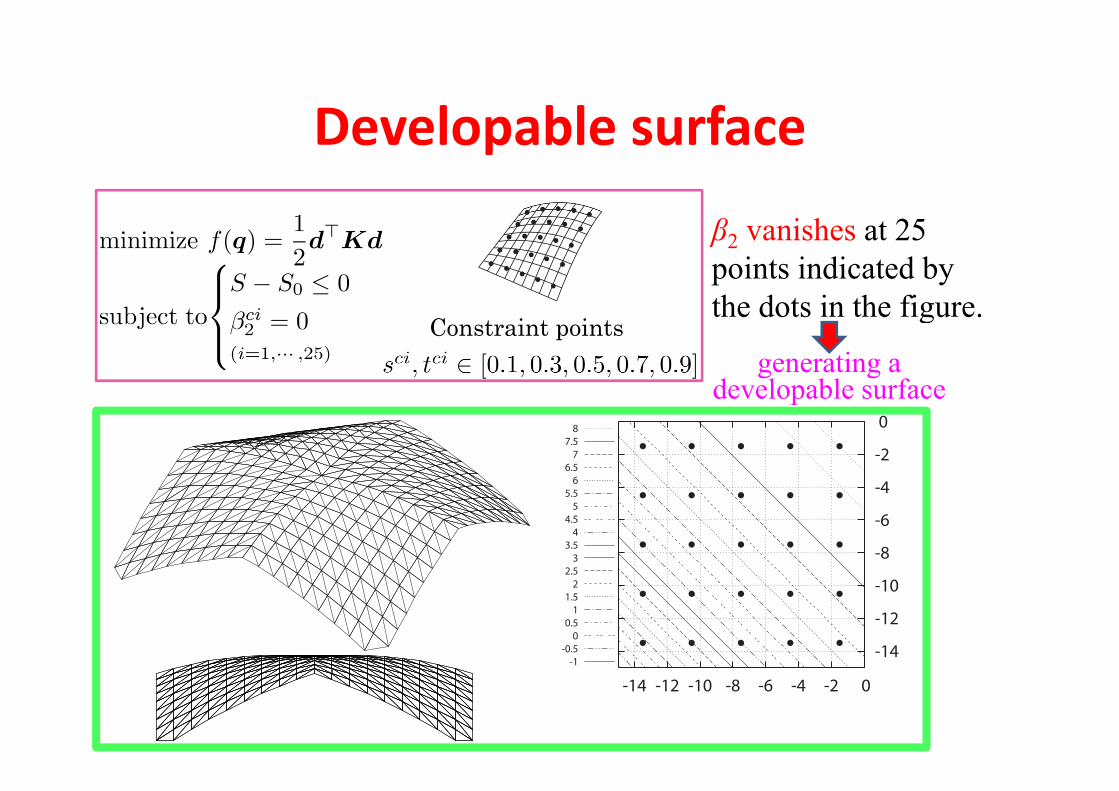
Developable surfaceDevelopable surface
β2 vanishes at 25 points indicated by the dots in the figure
generating a developable surface
the dots in the figure.Constraint points
developable surface
4
-2
0 8 7.5 7
6.5 6
-8
-6
-4 5.5 5
4.5 4
3.5 3
2.5
-14
-12
-10 2 1.5 1
0.5 0
-0.5-1
-14 -12 -10 -8 -6 -4 -2 0 1
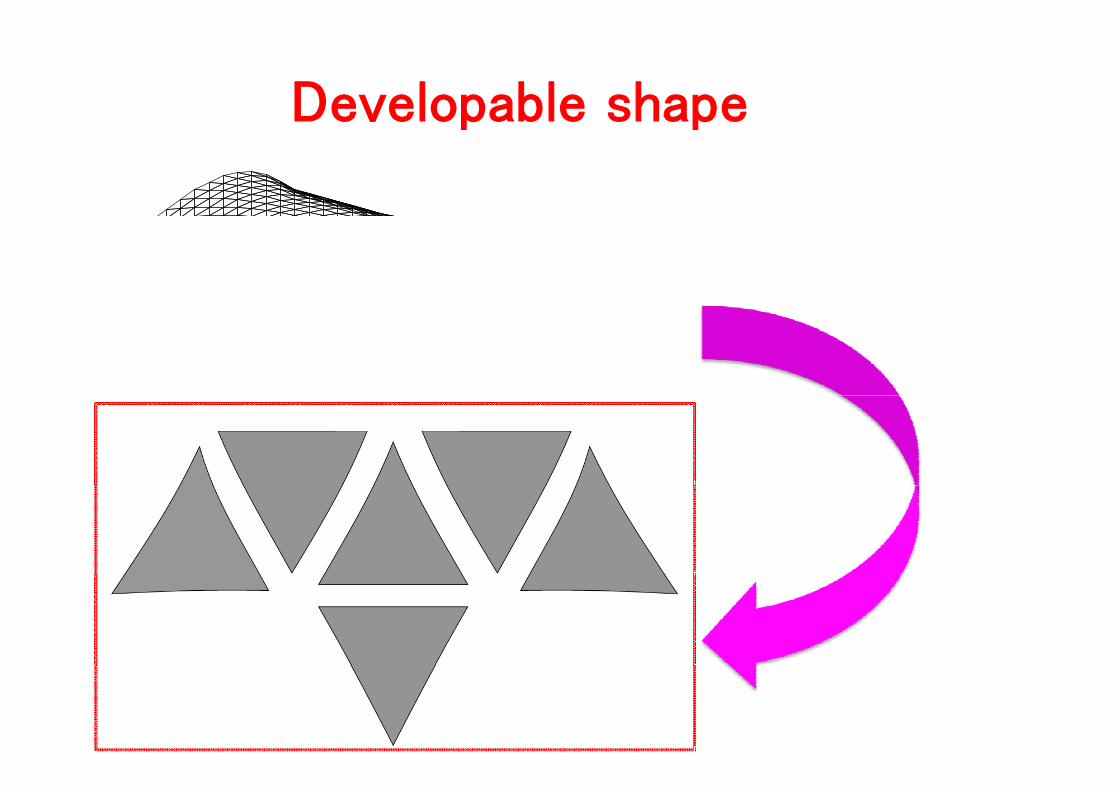
Developable shapep p
17171717
18181818

19191919

20202020

Optimization of Latticed ShellOptimization of Latticed Shellpp
Structural Performanceminimizeminimize
Optimal shape with
large stiffness+・Strain energy・Compliance
Non-structural Performance
Geomertical propertyUniform member length
Constructability・ Uniform member length・Minimum number of different joints
21212121

Performance measuresPerformance measures
Strain energy:Strain energy:
Variance of member length:Variance of member length:
Constraint on total member length:
:nodal displacement vector
2222
:stiffness matrix:number of members:length of kth member 2222:average ember length:total member length

Optimization ProblemOptimization Problempp
Multiobjective Optimization
( )f x ( )g xMinimize and
Multiobjective Optimization
0( )L Lxsubject tof(x): strain energy
Constraint Approachg(x): variance of member length
( )f x
( ) 0g xMinimize
subject to
( )g xMinimize
subject to ( )f fx
23230( )L Lx
( ) 0g xsubject to
0( )L Lx
subject to ( )f fx
2323
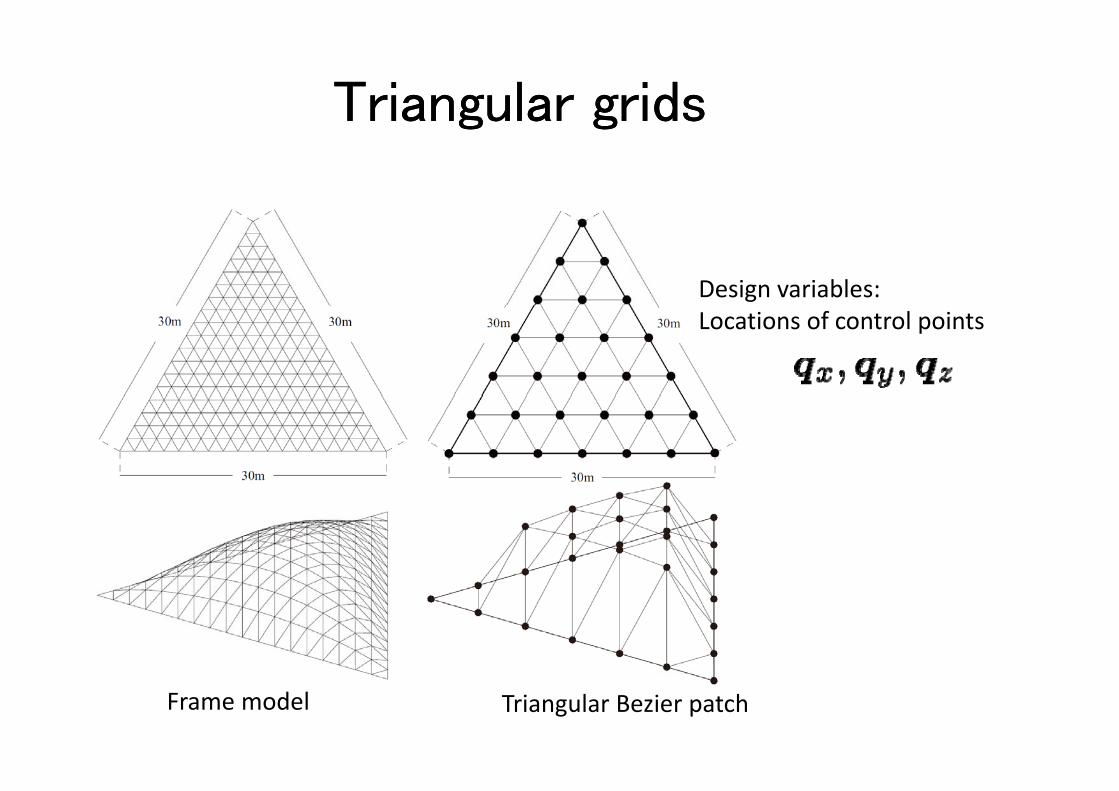
Triangular gridsTriangular gridsg gg g
Design variables:Locations of control points
24242424Frame model Triangular Bezier patch

Fixed control points
Fixed supports
←strain energy
←t t l l th
←variance of member length
←t t l l th
Fixed supports
2525uniform member length
←total length←total length
←strain energy
2525No feasible solutionNo feasible solution
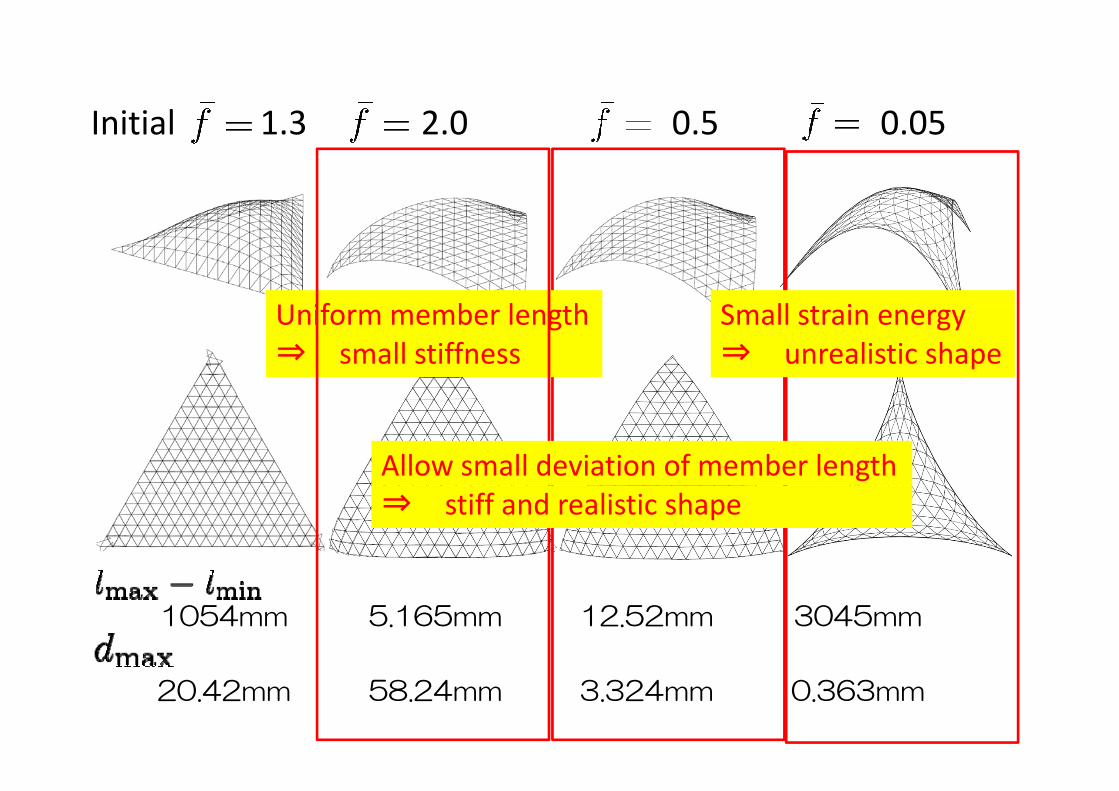
Initial 1 3 2 0 0 5 0 05Initial 1.3 2.0 0.5 0.05
U if b l h S ll iUniform member length⇒ small stiffness
Small strain energy ⇒ unrealistic shape
VV VAllow small deviation of member length⇒ stiff and realistic shape
26261054mm 5.165mm 12.52mm 3045mm
262620.42mm 58.24mm 3.324mm 0.363mm

Fixed point
Move in horizontal dir.
2727
Uniform member lengthCylindrical shapeSmall stiffness 2727Small stiffness
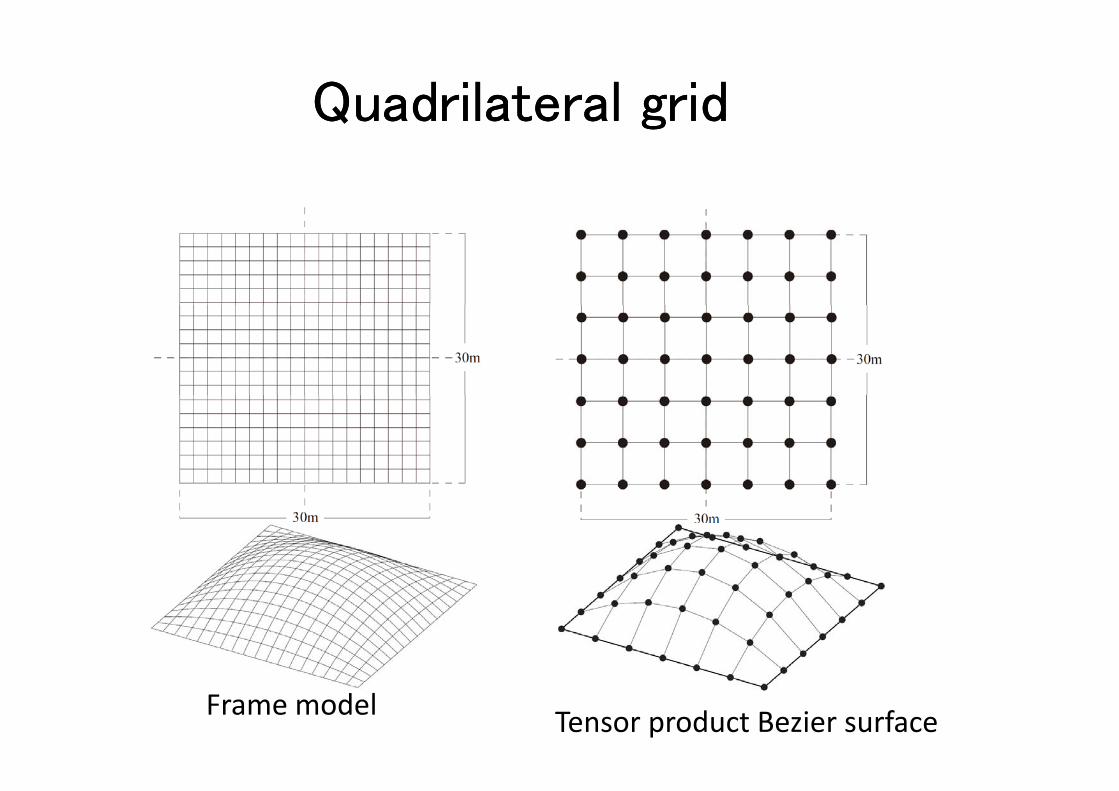
Quadrilateral gridQuadrilateral gridgg
28282828Frame model Tensor product Bezier surface
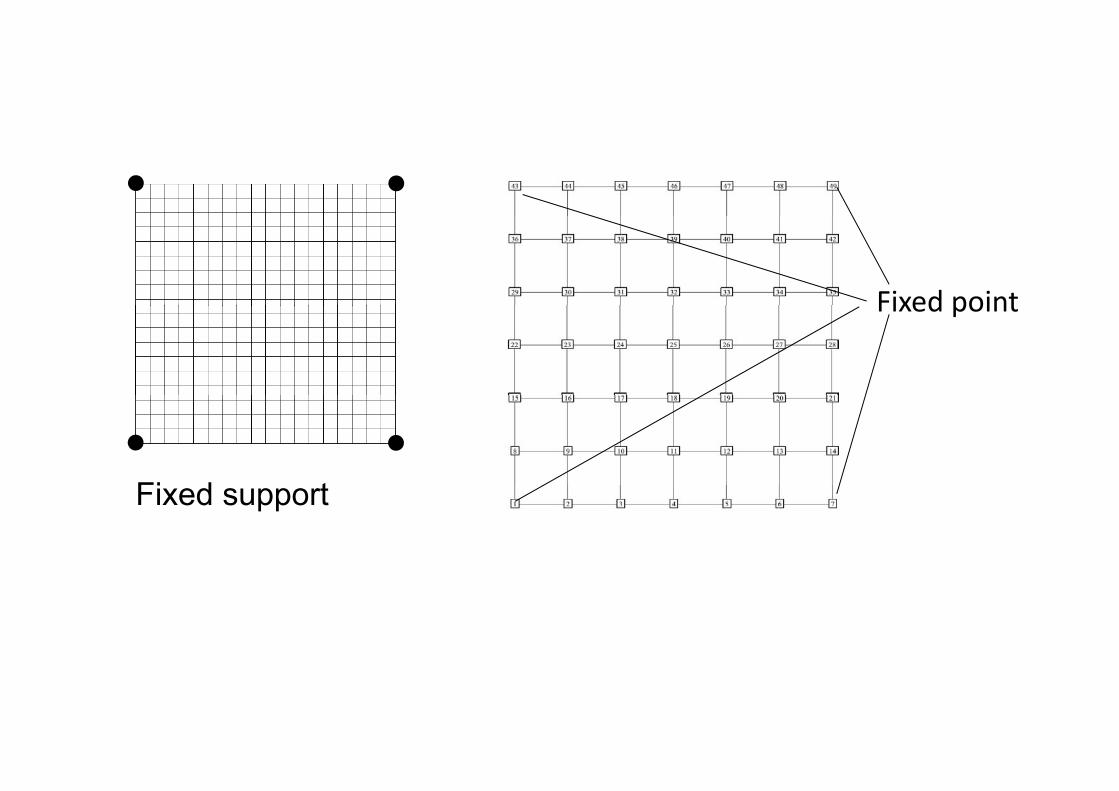
Fixed pointFixed point
Fi d tFixed support
29292929

Initial8 226f
max min
8.226422.2
fl l
Large strain energySmall deviation of
member length
i
1.2700 07277
fl l
Small strain energy
max min 0.07277l l
3030
gyLarge deviation of
member length
0 4162f 3030
max min
0.41620.9248
fl l

Initial 0.032 0.08 0.040 0.005
Almost uniform member length
3131422.2mm 3.340mm 8.418mm 93.59mm
31310.840mm 3.792mm 1.665mm 0.144mm

Pareto optimal solutions from Pareto optimal solutions from ppdifferent initial solutionsdifferent initial solutions
32323232

Hexagonal GridHexagonal Gridgg
3333Do not use parametric surfaces3333Do not use parametric surfacesUse symmetry conditions

Fixed supports
34343434

Initial
2.750f max min 536.2l l
Optimal shape: case 1
353535350.08689f
max min 0.002850l l
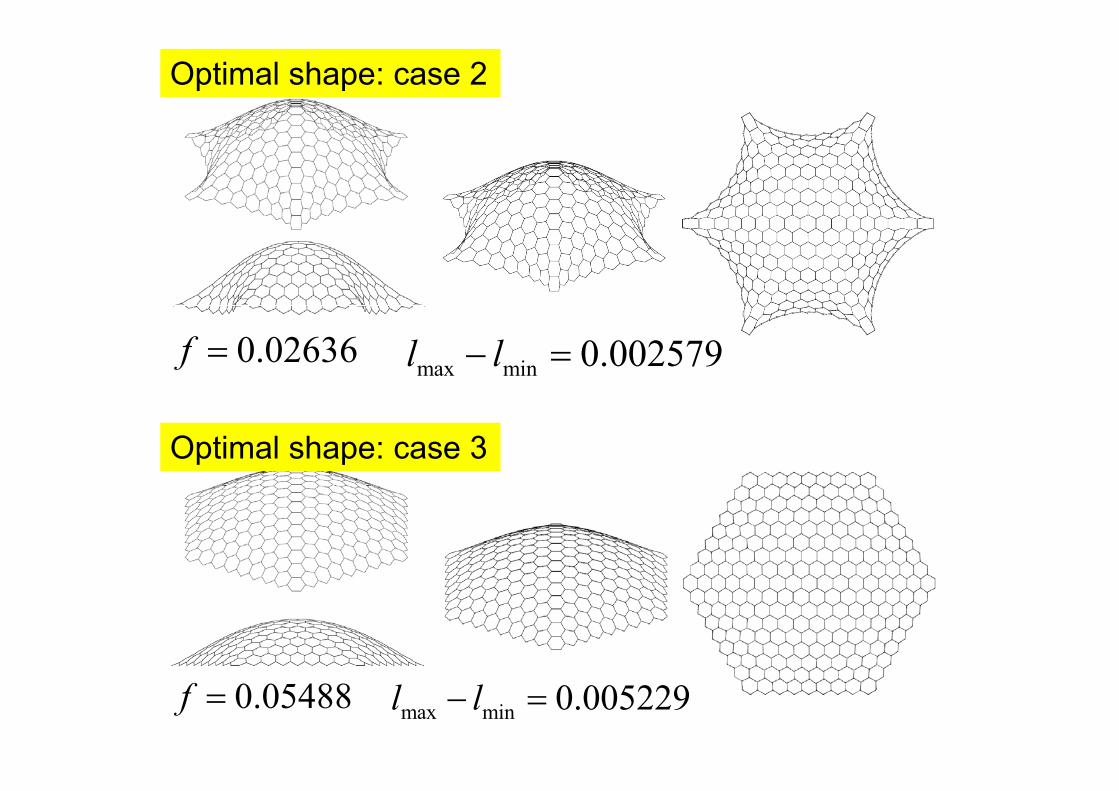
Optimal shape: case 2
0.02636f max min 0.002579l l
Optimal shape: case 3
363636360.05488f max min 0.005229l l

ConclusionsConclusions• Multiobjective shape optimization of latticed shells.Multiobjective shape optimization of latticed shells.
– Objective functions: strain energy and variance of member lengths.
– Optimal shapes for triangular, quadrilateral, and hexagonal grids.C i h f i h l i bj i– Constraint approach for converting the multiobjective problem to a single objective problem.
• Feasible solution with uniform member lengths• Feasible solution with uniform member lengths⇒Minimize strain energy under uniform
member lengths.g• No feasible solution⇒Minimize variance of member length for g
specified strain energy.

ConclusionsConclusions• Optimal shape of triangular grid with uniform• Optimal shape of triangular grid with uniform member lengths⇒ li d i l f i h il l i l⇒ cylindrical surface with equilateral triangles.
• Optimal shapes of quadrilateral gridp p q g⇒ highly dependent on initial solution;
bifurcation in objective function spacebifurcation in objective function space. • Various shapes with uniform member lengths for hexagonal grids.





























