Embed Size (px)
Citation preview

Multiscale Methods for Crowd DynamicsIndividuality vs. Collectivity
Andrea Tosin
Istituto per le Applicazioni del Calcolo “M. Picone”Consiglio Nazionale delle Ricerche
Rome, Italy
[email protected]://www.iac.cnr.it/˜tosin
Department of Mathematical SciencesPolitecnico di Torino
October 11, 2013
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 1/9
Individuality vs. Collectivity
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 2/9
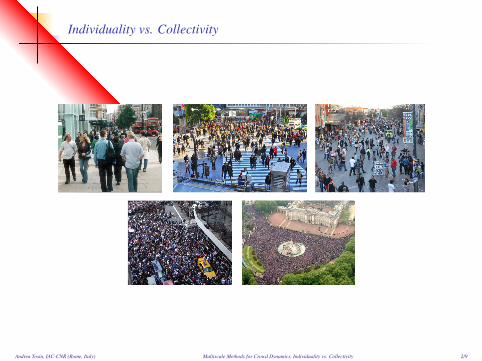
Microscopic (Particle-Based) Models
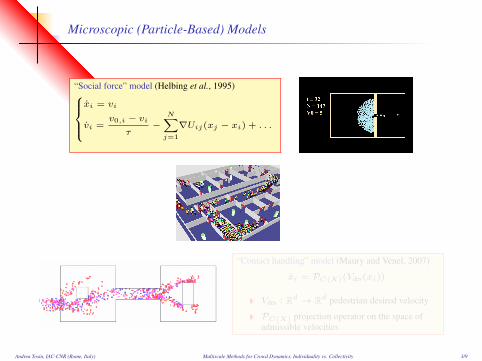
“Social force” model (Helbing et al., 1995)xi = vi
vi =v0,i − vi
τ−
N∑j=1
∇Uij(xj − xi) + . . .
“Contact handling” model (Maury and Venel, 2007)
xi = PC(X)(Vdes(xi))
Vdes : Rd → Rd pedestrian desired velocity
PC(X) projection operator on the space ofadmissible velocities
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 3/9
Microscopic (Particle-Based) Models
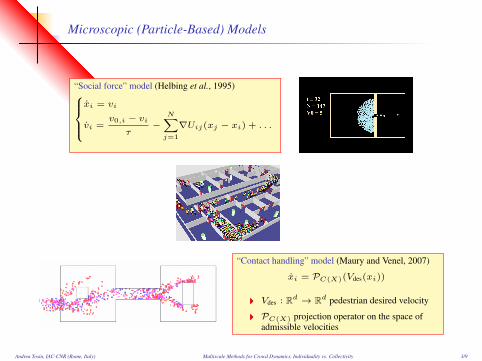
“Social force” model (Helbing et al., 1995)xi = vi
vi =v0,i − vi
τ−
N∑j=1
∇Uij(xj − xi) + . . .
“Contact handling” model (Maury and Venel, 2007)
xi = PC(X)(Vdes(xi))
Vdes : Rd → Rd pedestrian desired velocity
PC(X) projection operator on the space ofadmissible velocities
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 3/9
Microscopic (Particle-Based) Models
“Social force” model (Helbing et al., 1995)xi = vi
vi =v0,i − vi
τ−
N∑j=1
∇Uij(xj − xi) + . . .
“Contact handling” model (Maury and Venel, 2007)
xi = PC(X)(Vdes(xi))
Vdes : Rd → Rd pedestrian desired velocity
PC(X) projection operator on the space ofadmissible velocities
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 3/9
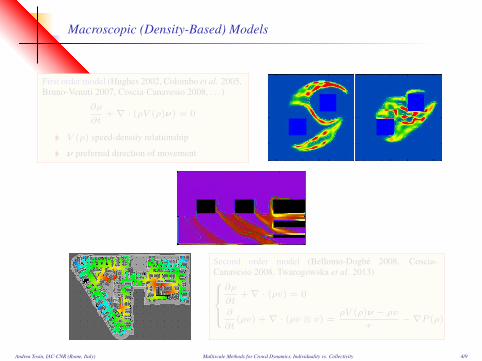
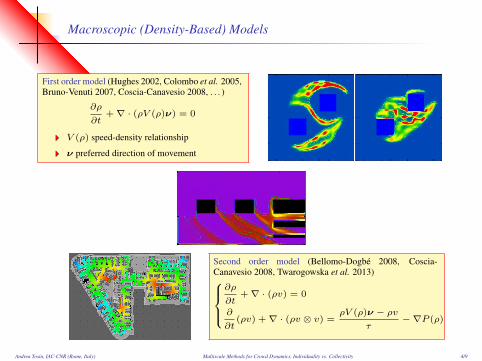
Macroscopic (Density-Based) Models
First order model (Hughes 2002, Colombo et al. 2005,Bruno-Venuti 2007, Coscia-Canavesio 2008, . . . )
∂ρ
∂t+∇ · (ρV (ρ)ν) = 0
V (ρ) speed-density relationship
ν preferred direction of movement
Second order model (Bellomo-Dogbe 2008, Coscia-Canavesio 2008, Twarogowska et al. 2013)∂ρ
∂t+∇ · (ρv) = 0
∂
∂t(ρv) +∇ · (ρv ⊗ v) =
ρV (ρ)ν − ρvτ
−∇P (ρ)
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 4/9
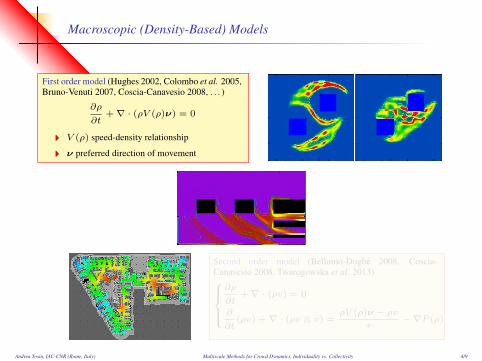
Macroscopic (Density-Based) Models
First order model (Hughes 2002, Colombo et al. 2005,Bruno-Venuti 2007, Coscia-Canavesio 2008, . . . )
∂ρ
∂t+∇ · (ρV (ρ)ν) = 0
V (ρ) speed-density relationship
ν preferred direction of movement
Second order model (Bellomo-Dogbe 2008, Coscia-Canavesio 2008, Twarogowska et al. 2013)∂ρ
∂t+∇ · (ρv) = 0
∂
∂t(ρv) +∇ · (ρv ⊗ v) =
ρV (ρ)ν − ρvτ
−∇P (ρ)
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 4/9
Macroscopic (Density-Based) Models
First order model (Hughes 2002, Colombo et al. 2005,Bruno-Venuti 2007, Coscia-Canavesio 2008, . . . )
∂ρ
∂t+∇ · (ρV (ρ)ν) = 0
V (ρ) speed-density relationship
ν preferred direction of movement
Second order model (Bellomo-Dogbe 2008, Coscia-Canavesio 2008, Twarogowska et al. 2013)∂ρ
∂t+∇ · (ρv) = 0
∂
∂t(ρv) +∇ · (ρv ⊗ v) =
ρV (ρ)ν − ρvτ
−∇P (ρ)
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 4/9
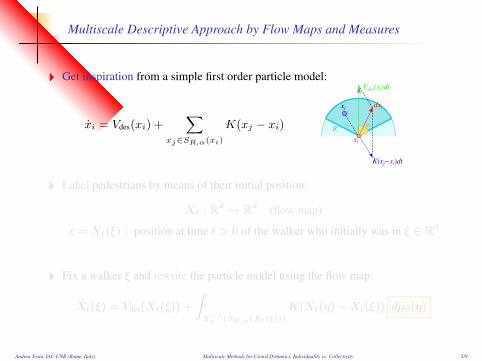
Multiscale Descriptive Approach by Flow Maps and Measures
Get inspiration from a simple first order particle model:
xi = Vdes(xi) +∑
xj∈SR,α(xi)
K(xj − xi) R α
xi
xj
Vdes(xi)dt
dxi
K(xj−xi)dt
Label pedestrians by means of their initial position:
Xt : Rd → Rd (flow map)
x = Xt(ξ) : position at time t > 0 of the walker who initially was in ξ ∈ Rd
Fix a walker ξ and rewrite the particle model using the flow map:
Xt(ξ) = Vdes(Xt(ξ)) +
∫X−1t (SR,α(Xt(ξ)))
K(Xt(η)−Xt(ξ)) dµ0(η)
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 5/9
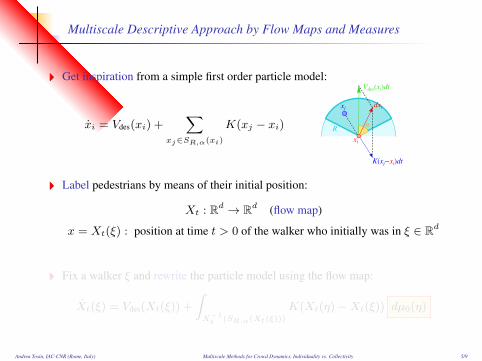
Multiscale Descriptive Approach by Flow Maps and Measures
Get inspiration from a simple first order particle model:
xi = Vdes(xi) +∑
xj∈SR,α(xi)
K(xj − xi) R α
xi
xj
Vdes(xi)dt
dxi
K(xj−xi)dt
Label pedestrians by means of their initial position:
Xt : Rd → Rd (flow map)
x = Xt(ξ) : position at time t > 0 of the walker who initially was in ξ ∈ Rd
Fix a walker ξ and rewrite the particle model using the flow map:
Xt(ξ) = Vdes(Xt(ξ)) +
∫X−1t (SR,α(Xt(ξ)))
K(Xt(η)−Xt(ξ)) dµ0(η)
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 5/9
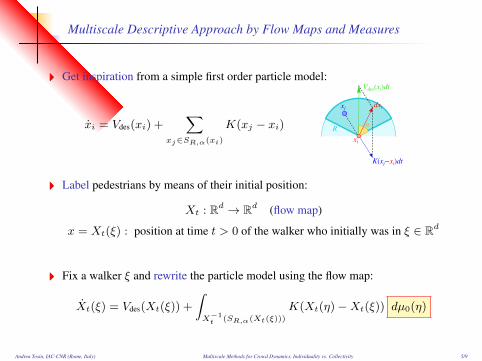
Multiscale Descriptive Approach by Flow Maps and Measures
Get inspiration from a simple first order particle model:
xi = Vdes(xi) +∑
xj∈SR,α(xi)
K(xj − xi) R α
xi
xj
Vdes(xi)dt
dxi
K(xj−xi)dt
Label pedestrians by means of their initial position:
Xt : Rd → Rd (flow map)
x = Xt(ξ) : position at time t > 0 of the walker who initially was in ξ ∈ Rd
Fix a walker ξ and rewrite the particle model using the flow map:
Xt(ξ) = Vdes(Xt(ξ)) +
∫X−1t (SR,α(Xt(ξ)))
K(Xt(η)−Xt(ξ)) dµ0(η)
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 5/9
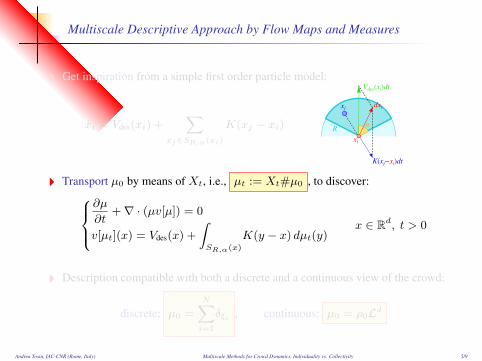
Multiscale Descriptive Approach by Flow Maps and Measures
Get inspiration from a simple first order particle model:
xi = Vdes(xi) +∑
xj∈SR,α(xi)
K(xj − xi) R α
xi
xj
Vdes(xi)dt
dxi
K(xj−xi)dt
Transport µ0 by means of Xt, i.e., µt := Xt#µ0 , to discover:∂µ
∂t+∇ · (µv[µ]) = 0
v[µt](x) = Vdes(x) +
∫SR,α(x)
K(y − x) dµt(y)x ∈ Rd, t > 0
Description compatible with both a discrete and a continuous view of the crowd:
discrete: µ0 =
N∑i=1
δξi , continuous: µ0 = ρ0Ld
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 5/9
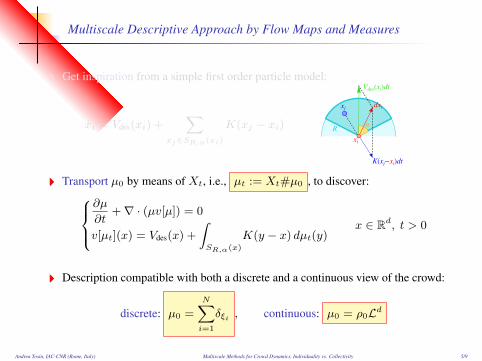
Multiscale Descriptive Approach by Flow Maps and Measures
Get inspiration from a simple first order particle model:
xi = Vdes(xi) +∑
xj∈SR,α(xi)
K(xj − xi) R α
xi
xj
Vdes(xi)dt
dxi
K(xj−xi)dt
Transport µ0 by means of Xt, i.e., µt := Xt#µ0 , to discover:∂µ
∂t+∇ · (µv[µ]) = 0
v[µt](x) = Vdes(x) +
∫SR,α(x)
K(y − x) dµt(y)x ∈ Rd, t > 0
Description compatible with both a discrete and a continuous view of the crowd:
discrete: µ0 =
N∑i=1
δξi , continuous: µ0 = ρ0Ld
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 5/9
Discrete and Continuous: So Close. . .
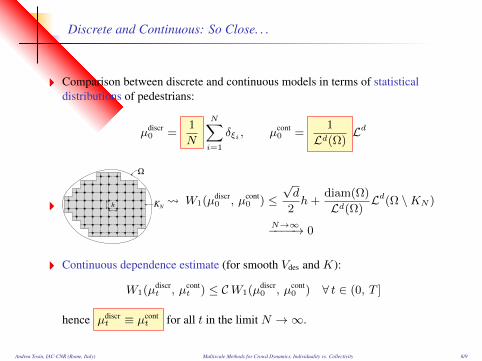
Comparison between discrete and continuous models in terms of statisticaldistributions of pedestrians:
µdiscr0 =
1
N
N∑i=1
δξi , µcont0 =
1
Ld(Ω)Ld
h
Ω
KN W1(µdiscr
0 , µcont0 ) ≤
√d
2h+
diam(Ω)
Ld(Ω)Ld(Ω \KN )
N→∞−−−−→ 0
Continuous dependence estimate (for smooth Vdes and K):
W1(µdiscrt , µcont
t ) ≤ CW1(µdiscr0 , µcont
0 ) ∀ t ∈ (0, T ]
hence µdiscrt ≡ µcont
t for all t in the limit N →∞.
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 6/9
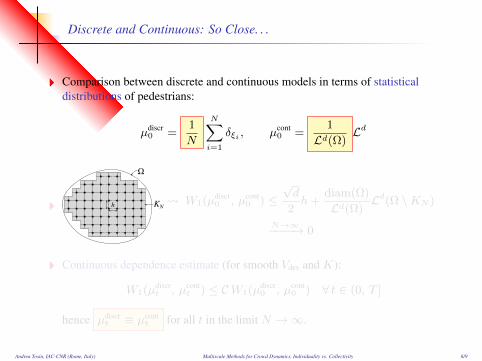
Discrete and Continuous: So Close. . .
Comparison between discrete and continuous models in terms of statisticaldistributions of pedestrians:
µdiscr0 =
1
N
N∑i=1
δξi , µcont0 =
1
Ld(Ω)Ld
h
Ω
KN W1(µdiscr
0 , µcont0 ) ≤
√d
2h+
diam(Ω)
Ld(Ω)Ld(Ω \KN )
N→∞−−−−→ 0
Continuous dependence estimate (for smooth Vdes and K):
W1(µdiscrt , µcont
t ) ≤ CW1(µdiscr0 , µcont
0 ) ∀ t ∈ (0, T ]
hence µdiscrt ≡ µcont
t for all t in the limit N →∞.
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 6/9
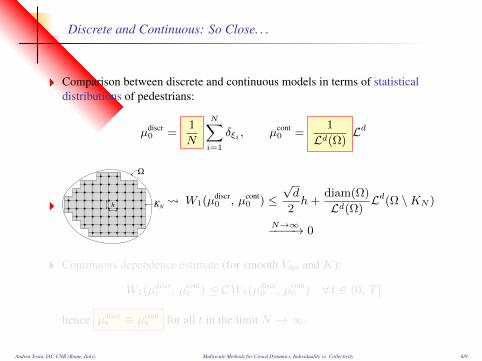
Discrete and Continuous: So Close. . .
Comparison between discrete and continuous models in terms of statisticaldistributions of pedestrians:
µdiscr0 =
1
N
N∑i=1
δξi , µcont0 =
1
Ld(Ω)Ld
h
Ω
KN W1(µdiscr
0 , µcont0 ) ≤
√d
2h+
diam(Ω)
Ld(Ω)Ld(Ω \KN )
N→∞−−−−→ 0
Continuous dependence estimate (for smooth Vdes and K):
W1(µdiscrt , µcont
t ) ≤ CW1(µdiscr0 , µcont
0 ) ∀ t ∈ (0, T ]
hence µdiscrt ≡ µcont
t for all t in the limit N →∞.
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 6/9
Discrete and Continuous: . . . So Far
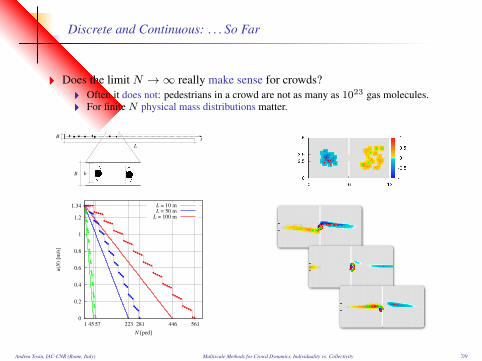
Does the limit N →∞ really make sense for crowds?Often it does not: pedestrians in a crowd are not as many as 1023 gas molecules.For finite N physical mass distributions matter.
L
Bx
B b
0
0.2
0.4
0.6
0.8
1
1.2
1.34
1 45 57 223 281 446 561
u(N
) [m
/s]
N [ped]
L = 10 mL = 50 m
L = 100 m
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 7/9

SIMAI Activity Group on Complex Systems – http://sisco.simai.eu
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 8/9
References
• N. Bellomo, B. Piccoli, and A. Tosin.Modeling crowd dynamics from a complex system viewpoint.Math. Models Methods Appl. Sci., 22(supp02):1230004 (29 pages), 2012.
• L. Bruno, A. Tosin, P. Tricerri, and F. Venuti.Non-local first-order modelling of crowd dynamics: A multidimensional framework with applications.Appl. Math. Model., 35(1):426–445, 2011.
• A. Corbetta and A. Tosin.Bridging discrete and continuous differential models of crowd dynamics: A fundamental-diagram-aided comparative study.Preprint: arXiv:1306.2472, 2013.
• A. Corbetta, A. Tosin, and L. Bruno.From individual behaviors to an evaluation of the collective evolution of crowds along footbridges.Preprint: arXiv:1212.3711, 2012.
• E. Cristiani, B. Piccoli, and A. Tosin.Multiscale Modeling of Pedestrian Dynamics.In preparation.
• E. Cristiani, B. Piccoli, and A. Tosin.Multiscale modeling of granular flows with application to crowd dynamics.Multiscale Model. Simul., 9(1):155–182, 2011.
• B. Piccoli and A. Tosin.Pedestrian flows in bounded domains with obstacles.Contin. Mech. Thermodyn., 21(2):85–107, 2009.
• B. Piccoli and A. Tosin.Time-evolving measures and macroscopic modeling of pedestrian flow.Arch. Ration. Mech. Anal., 199(3):707–738, 2011.
• A. Tosin and P. Frasca.Existence and approximation of probability measure solutions to models of collective behaviors.Netw. Heterog. Media, 6(3):561–596, 2011.
Andrea Tosin, IAC-CNR (Rome, Italy) Multiscale Methods for Crowd Dynamics, Individuality vs. Collectivity 9/9



















![[DL輪読会]Parallel Multiscale Autoregressive Density Estimation](https://img.pdfslide.tips/doc/110x75/5a64d62f7f8b9a88148b589b/dlparallel-multiscale-autoregressive-density-estimation.jpg)