Embed Size (px)
Citation preview

1/10
Le Multitec en un clin d’œil
Sections Maintenance Industrielle
Famille de composants abordés Automate programmable et IHM (Pupitre tactile graphique couleur) Déplacement (Axe vertical, Convoyeurs à rouleaux) Préhension (Taquets) Communication industrielle (Ethernet) et supervision Energie électrique ( Appareillage BT, Moteur) Pneumatique ( Filtre et régulateur, Distributeurs, Vérins) Hydraulique TOR ( Centrale, Distributeurs, Vérin) Capteurs ( ILS, photo-électrique, électro-mécanique)
Activités pédagogiques Analyse fonctionnelle et étude des technologies et solutions
constructives (3D Solidworks) Réglages et Conduite du système automatique ou manuelle Montages, démontages et changement de technologie de l’axe vertical
(3 kits d’animation) Raccordement des actionneurs et des capteurs Élaboration et mise à jour d’un dossier d’exploitation maintenance Programmation et étude des Grafcet Maintenances préventive et corrective (Diagnostics de pannes
électriques et mécaniques) Améliorations (ex : Intégration de constituants) Analyse des performances du système, tests statiques ou dynamiques
Références OM50-AC51 : Partie opérative du Multitec avec 5 palettes fournies AC60 : Armoire de puissance et commande équipée d’un automate de
type M340 Télémécanique et pupitre tactile (UNITY PRO et VIJEO DESIGNER non fournis) AS60 : Armoire de puissance et de commande équipée d’un automate
de type S7-1200 Siemens et pupitre tactile (logiciel de programmation fournis) KE50 : Kit d’animation électrique KH50 : Kit d’animation hydraulique KP50 : Kit d’animation pneumatique UC13 : Supervision industrielle
Produits associés OS50 : Module Axe vertical Multitec CT10 : Module Taquets Multitec TM50 : Module Table de transfert à rouleaux motorisés Multitec HD10 : Module De Levage Hydraulique MN10: Maquette numérique programmable Multitec HY10 : Valise Analyse d’huiles HY11 : Valise Mesures Hydrauliques HY12 : Groupe filtration d’huile MG10 : Logiciel de GMAO
Caractéristiques L/ I/ H : 2020 x 1350 x 2250 mm Énergie électrique : 400 V triphasé + Neutre Énergie pneumatique : 0.6 MPa (6 bars)
Ce système est accompagné d'un CD dossier technique et
pédagogique
Architecture fonctionnelle
Description fonctionnelle Le système automatisé Multitec est un système destiné à l’empilage et au
dépilage des palettes vides sur les chaînes de conditionnement. Deux types de configuration peuvent être envisagés sur le système :
• En mode Dépileur, le système permet de dépiler des palettes vides afin de les introduire sur une ligne de palettisation.
• En mode Empileur, le système permet d’empiler des palettes vides issues d’une ligne de dépalettisation.
Sous-ensemble Transfert des palettes Il permet de transférer les palettes depuis l’entrée du système vers
l’élévateur (ou inversement selon le mode choisi). Il est principalement constitué :
• D’un convoyeur à rouleaux • D’un moteur électrique asynchrone triphasé entraînant les rouleaux • De deux cellules photo-électriques permettant de détecter la présence
des palettes à l’entrée du convoyeur et sous l’élévateur.
Sous-ensemble Saisie des palettes La préhension des palettes est assurée par un ensemble de 4 taquets
articulés associés à des vérins pneumatiques et à des biellettes. Ce sous-ensemble comporte:
• Un ensemble symétrique de 2 fois 2 taquets articulés • Deux vérins pneumatiques double effet permettant de manœuvrer les
taquets • Quatre détecteurs ILS magnétiques de fin de course montés sur les
vérins
Multitec Système permettant d’Empiler ou de Dépiler des palettes au format ½ europe 800 x 600
Plus d’informations sur www.erm-automatismes.com MàJ: 20120905

2/10
Sous-ensemble Élévation et stockage Il comporte :
• Un magasin de stockage des palettes mobile guidé verticalement par des rails et des galets
• Un système de motorisation qui peut être réalisée au choix par trois actionneurs différents : – Moteur électrique – Vérins pneumatiques – Vérin hydraulique
Le système à moteur électrique est constitué :
• D’un motoréducteur électrique triphasé associé à la chaîne permettant d’assurer la montée et la descente de la partie mobile
• De trois interrupteurs de position
Le système à vérin pneumatique est constitué : • De deux vérins pneumatique montés en tandem permettent d’assurer
l’élévation de la partie mobile, la descente étant réalisée par gravité sous le poids de l’ensemble mobile
• De quatre détecteurs ILS magnétiques de fin de course montés sur les vérins
Le système à vérin hydraulique est constitué : • D’un vérin hydraulique associé à un groupe hydraulique permettant
d’assurer l’élévation de la partie mobile, la descente étant réalisée par gravité sous le poids de l’ensemble mobile
• De trois capteurs de position
Palettes format
½ europe (800 x 600)
Convoyeur à rouleaux
Système taquets
pneumatiques
Bâti mécano soudé
Armoire de puissance et
commande Magasin palettes
MOTORISATION
ELECTRIQUE
MOTORISATION
PNEUMATIQUE
MOTORISATION
HYDRAULIQUE
Moto réducteur à arbre creux (KE50) Vérin simple effet + centrale hydraulique (KH50) 2 Vérins double effet (utilisés en simple)
montés en tandem (KP50)
Architecture fonctionnelle (suite)
3/10
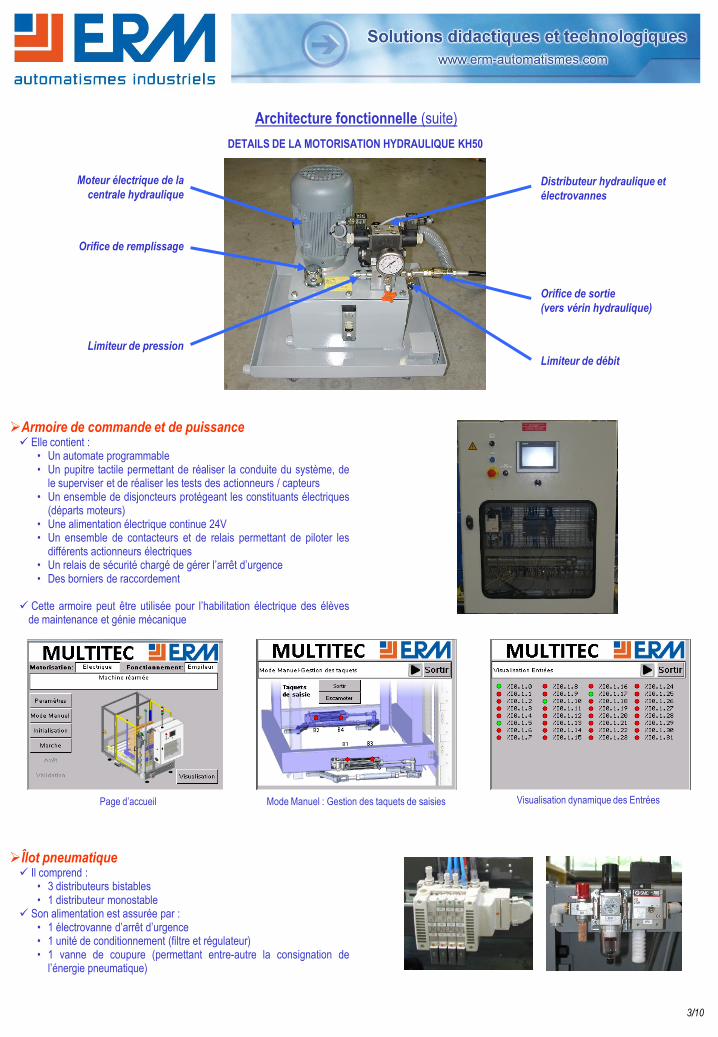
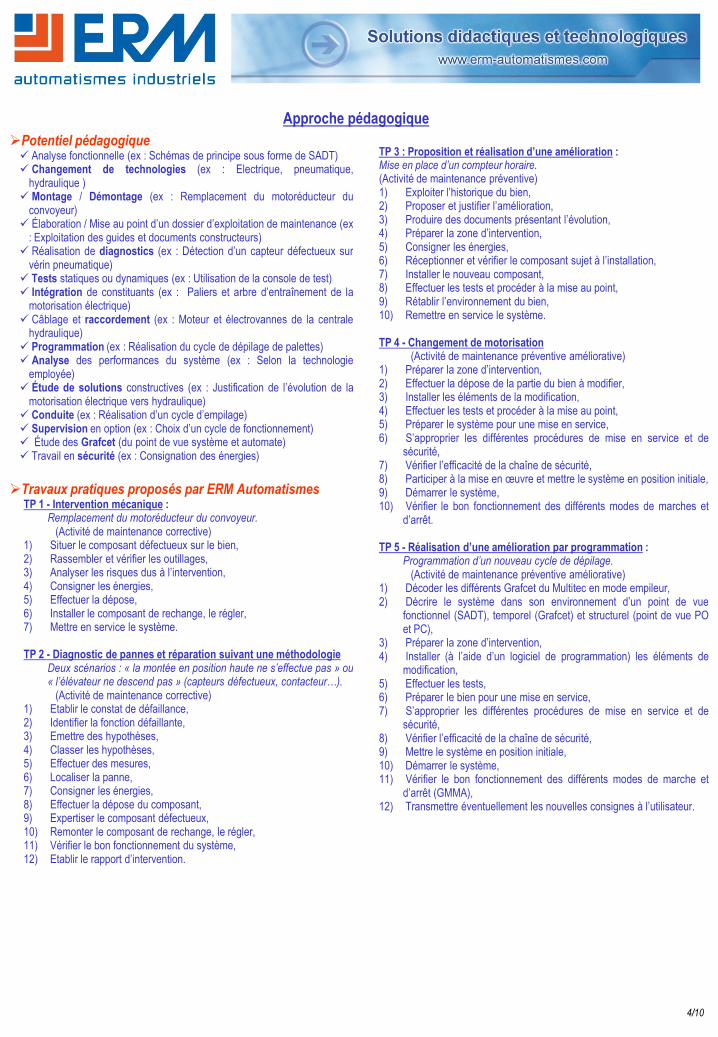
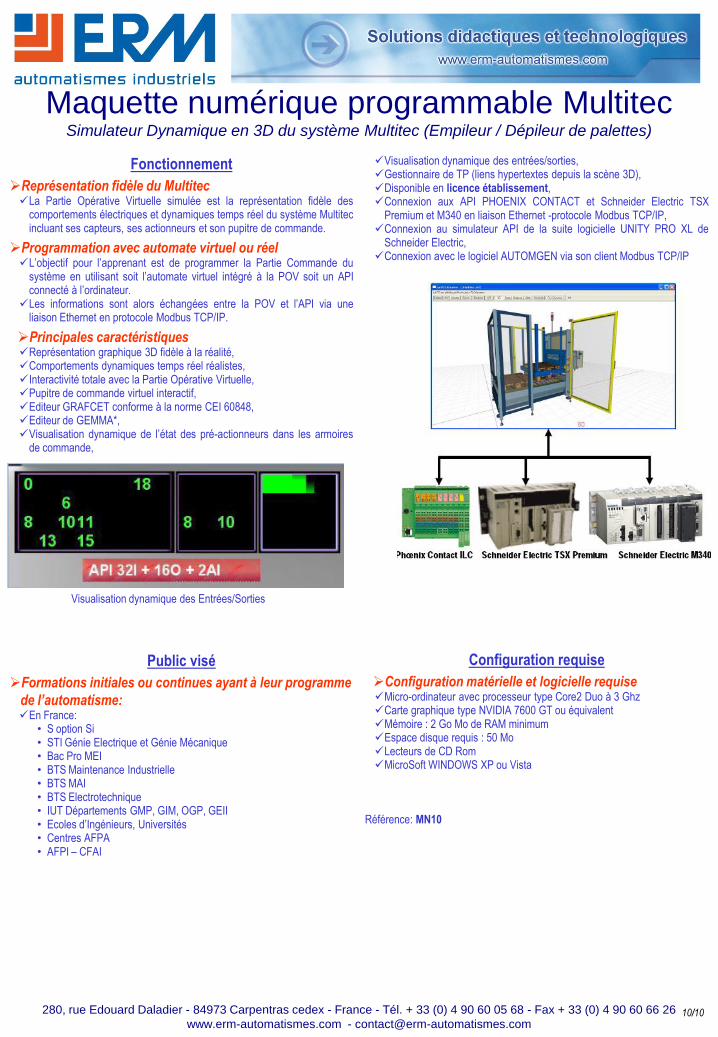
Armoire de commande et de puissance Elle contient :
• Un automate programmable • Un pupitre tactile permettant de réaliser la conduite du système, de
le superviser et de réaliser les tests des actionneurs / capteurs • Un ensemble de disjoncteurs protégeant les constituants électriques
(départs moteurs) • Une alimentation électrique continue 24V • Un ensemble de contacteurs et de relais permettant de piloter les
différents actionneurs électriques • Un relais de sécurité chargé de gérer l’arrêt d’urgence • Des borniers de raccordement
Cette armoire peut être utilisée pour l’habilitation électrique des élèves
de maintenance et génie mécanique
Îlot pneumatique Il comprend :
• 3 distributeurs bistables • 1 distributeur monostable
Son alimentation est assurée par : • 1 électrovanne d’arrêt d’urgence • 1 unité de conditionnement (filtre et régulateur) • 1 vanne de coupure (permettant entre-autre la consignation de
l’énergie pneumatique)
Limiteur de pression
Moteur électrique de la
centrale hydraulique
Distributeur hydraulique et
électrovannes
Orifice de remplissage
Limiteur de débit
Orifice de sortie
(vers vérin hydraulique)
DETAILS DE LA MOTORISATION HYDRAULIQUE KH50
Architecture fonctionnelle (suite)
Visualisation dynamique des Entrées Page d’accueil Mode Manuel : Gestion des taquets de saisies
4/10
Potentiel pédagogique Analyse fonctionnelle (ex : Schémas de principe sous forme de SADT) Changement de technologies (ex : Electrique, pneumatique,
hydraulique ) Montage / Démontage (ex : Remplacement du motoréducteur du
convoyeur) Élaboration / Mise au point d’un dossier d’exploitation de maintenance (ex
: Exploitation des guides et documents constructeurs) Réalisation de diagnostics (ex : Détection d’un capteur défectueux sur
vérin pneumatique) Tests statiques ou dynamiques (ex : Utilisation de la console de test) Intégration de constituants (ex : Paliers et arbre d’entraînement de la
motorisation électrique) Câblage et raccordement (ex : Moteur et électrovannes de la centrale
hydraulique) Programmation (ex : Réalisation du cycle de dépilage de palettes) Analyse des performances du système (ex : Selon la technologie
employée) Étude de solutions constructives (ex : Justification de l’évolution de la
motorisation électrique vers hydraulique) Conduite (ex : Réalisation d’un cycle d’empilage) Supervision en option (ex : Choix d’un cycle de fonctionnement) Étude des Grafcet (du point de vue système et automate) Travail en sécurité (ex : Consignation des énergies)
Travaux pratiques proposés par ERM Automatismes TP 1 - Intervention mécanique : Remplacement du motoréducteur du convoyeur. (Activité de maintenance corrective) 1) Situer le composant défectueux sur le bien, 2) Rassembler et vérifier les outillages, 3) Analyser les risques dus à l’intervention, 4) Consigner les énergies, 5) Effectuer la dépose, 6) Installer le composant de rechange, le régler, 7) Mettre en service le système.
TP 2 - Diagnostic de pannes et réparation suivant une méthodologie Deux scénarios : « la montée en position haute ne s’effectue pas » ou
« l’élévateur ne descend pas » (capteurs défectueux, contacteur…). (Activité de maintenance corrective) 1) Etablir le constat de défaillance, 2) Identifier la fonction défaillante, 3) Emettre des hypothèses, 4) Classer les hypothèses, 5) Effectuer des mesures, 6) Localiser la panne, 7) Consigner les énergies, 8) Effectuer la dépose du composant, 9) Expertiser le composant défectueux, 10) Remonter le composant de rechange, le régler, 11) Vérifier le bon fonctionnement du système, 12) Etablir le rapport d’intervention.
TP 3 : Proposition et réalisation d’une amélioration : Mise en place d’un compteur horaire. (Activité de maintenance préventive) 1) Exploiter l’historique du bien, 2) Proposer et justifier l’amélioration, 3) Produire des documents présentant l’évolution, 4) Préparer la zone d’intervention, 5) Consigner les énergies, 6) Réceptionner et vérifier le composant sujet à l’installation, 7) Installer le nouveau composant, 8) Effectuer les tests et procéder à la mise au point, 9) Rétablir l’environnement du bien, 10) Remettre en service le système.
TP 4 - Changement de motorisation (Activité de maintenance préventive améliorative) 1) Préparer la zone d’intervention, 2) Effectuer la dépose de la partie du bien à modifier, 3) Installer les éléments de la modification, 4) Effectuer les tests et procéder à la mise au point, 5) Préparer le système pour une mise en service, 6) S’approprier les différentes procédures de mise en service et de
sécurité, 7) Vérifier l’efficacité de la chaîne de sécurité, 8) Participer à la mise en œuvre et mettre le système en position initiale, 9) Démarrer le système, 10) Vérifier le bon fonctionnement des différents modes de marches et
d’arrêt.
TP 5 - Réalisation d’une amélioration par programmation : Programmation d’un nouveau cycle de dépilage. (Activité de maintenance préventive améliorative) 1) Décoder les différents Grafcet du Multitec en mode empileur, 2) Décrire le système dans son environnement d’un point de vue
fonctionnel (SADT), temporel (Grafcet) et structurel (point de vue PO et PC),
3) Préparer la zone d’intervention, 4) Installer (à l’aide d’un logiciel de programmation) les éléments de
modification, 5) Effectuer les tests, 6) Préparer le bien pour une mise en service, 7) S’approprier les différentes procédures de mise en service et de
sécurité, 8) Vérifier l’efficacité de la chaîne de sécurité, 9) Mettre le système en position initiale, 10) Démarrer le système, 11) Vérifier le bon fonctionnement des différents modes de marche et
d’arrêt (GMMA), 12) Transmettre éventuellement les nouvelles consignes à l’utilisateur.
Approche pédagogique

5/10
Le Module Axe Vertical Multitec en un clin d’œil
Sections Maintenance Industrielle
Points Forts & Activités Clés : Montage et démontage des 3 kits d’animation (électrique, pneumatique et
hydraulique) Diagnostic de panne et réparation Câblage et raccordement des actionneurs et des capteurs Réglages mécaniques des 3 technologies
Composants Particuliers : Système d’élévation identique au Multitec Coffret de puissance Coffret pneumatique (option)
Références : OS50: Module Axe vertical Multitec KE50: Kit d’animation électrique KH50: Kit d’animation hydraulique KP50: Kit d’animation pneumatique OS51: Distribution pneumatique pour KP50
Caractéristiques L/ I/ H : 1500 x 1000 x 1900 mm Énergie électrique : 400V triphasé + neutre Énergie pneumatique: 6 bars Masse : 120 kg
Ce système est accompagné d'un CD dossier technique
et pédagogique
Module Axe vertical Multitec Sous-ensemble fonctionnel élévateur du système Multitec
Châssis mécano soudé
supportant le système élévateur
(identique au Multitec)
Coffret de puissance électrique
pré-câblé pour recevoir les kits
d’animation
Système d’élévation
Console de test
Activités pédagogiques Montage/Démontage Câblage et raccordement Re-conditionnement de la chaîne fonctionnelle d’élévation (motorisation
électrique, pneumatique ou hydraulique) Intégration des actionneurs et des capteurs Raccordement des pré-actionneurs ou actionneurs Réglage des courses Réglage des capteurs Réalisation des tests statiques de mise au point ou d’intégration Réalisation de tests dynamiques Étude des solutions constructives Recherche de pannes
Travaux pratiques proposés par ERM Automatismes TP 1: Diagnostic de panne et réparation ((activité de maintenance corrective) Constatation de pannes Rédaction d’une fiche de constat de panne Diagnostic de panne Identification du constituant défectueux Lecture des nomenclatures et recherche de références Recherche du constituant dans un catalogue constructeur Démontage et remplacement du composant défectueux Raccordement Réglages (position et course) Vérification du fonctionnement Rédaction d’un rapport d’intervention TP 2: Re-conditionnement du système ((activité de maintenance préventive améliorative) Re-conditionnement hydraulique vers électrique Re-conditionnement électrique vers pneumatique Re-conditionnement pneumatique vers hydraulique
TP 3 : Intervention mécanique de contrôles et de réglages
(activité de maintenance préventive) Préparer la zone d’intervention, Rechercher des informations dans des dossiers techniques, Procéder aux réglages (mécaniques, capteurs…), S’approprier les différentes procédures de mise en service et de réglage, Participer à la mise en œuvre et mettre le système en position initiale, Démarrer le système, Vérifier le bon fonctionnement du système.
Approche pédagogique
280, rue Edouard Daladier - 84973 Carpentras cedex - France - Tél. + 33 (0) 4 90 60 05 68 - Fax + 33 (0) 4 90 60 66 26
www.erm-automatismes.com - [email protected] MàJ: 20100805
Carter transparent

6/10
Le Module CF Taquets Multitec en un clin d’œil
Sections Maintenance Industrielle
Famille de composants abordés Préhension ( Taquets) Pneumatique ( Régulateur, Distributeur bi-stable)
Activités pédagogiques Analyse fonctionnelle et étude des technologies et solutions
constructives (3D Solidworks) Montage, démontage et raccordement pneumatique Réglages mécaniques et pneumatiques (ex: Courses et parallélisme des
taquets)
Références : CT10 : Module CF Taquets Multitec
Caractéristiques L/ I/ H : 800 x 265 x 325 mm Énergie pneumatique : 0,6 MPa (6 bars)
Ce système est accompagné d'un CD dossier technique
et pédagogique
Module CF Taquets Multitec Sous-système permettant l’analyse de la prise de palettes du Multitec
Potentiel pédagogique Montage et démontage Réglage des courses Réglage du parallélisme Câblage pneumatique Réalisation des tests statiques de mise au point ou d’intégration Réalisation de tests dynamiques Étude des solutions constructives Étude de la chaîne cinématique
Travaux pratiques proposés par ERM Automatismes TP 1 - Montage et réglage mécanique du CF Taquets Identifier les principaux constituants d’une chaîne fonctionnelle
pneumatique Réaliser un montage mécanique à partir de fiches de montage Régler
TP 2 - Câblage et réglage pneumatique du CF Taquets Identifier les principaux constituants d’une chaîne fonctionnelle
pneumatique Concevoir un système pneumatique Câbler Régler
TP 3 - Étude cinématique et mécanique du CF Taquets Identifier les liaisons cinématiques sur une chaîne fonctionnelle Régler un système mécanique Schématiser un système cinématique Calculer des efforts sur un vérin
280, rue Edouard Daladier - 84973 Carpentras cedex - France - Tél. + 33 (0) 4 90 60 05 68 - Fax + 33 (0) 4 90 60 66 26
www.erm-automatismes.com - [email protected] MàJ: 20100805
Approche pédagogique

7/10
Le Module Table de transfert Multitec en un clin d’œil
Sections Maintenance Industrielle
Famille de composants abordés Déplacement ( Convoyeurs à rouleaux) Energie électrique ( Moteur asynchrone)
Activités pédagogiques Analyse fonctionnelle et étude des technologies et solutions
constructives (3D Solidworks) Montage, démontage (ex : Démontage du motoréducteur,
Remplacement d’un rouleau du convoyeur) et raccordement électrique Réglages mécaniques (ex : Réglage des rives pour l’entrée ou la sortie
des palettes)
Références : TM50 : Module Table de transfert Multitec
Caractéristiques L/ I/ H : 1000 x 1250 x 500 mm Énergie électrique : 400 V triphasé + Neutre, via le Multitec
Ce système est accompagné d'un CD dossier technique
et pédagogique
Module Table de transfert Multitec Convoyeur à rouleaux motorisés permettant le transfert des palettes
Châssis mécano-soudé
Rouleaux entraînés par
bracelets de chaînes
Moto-réducteur
Capteurs Photo-électriques Coffret de raccordement électrique
280, rue Edouard Daladier - 84973 Carpentras cedex - France - Tél. + 33 (0) 4 90 60 05 68 - Fax + 33 (0) 4 90 60 66 26
www.erm-automatismes.com - [email protected] MàJ: 20100805
Architecture fonctionnelle

8/10
Module De Levage Hydraulique Banc hydraulique instrumenté et contextualisé équipé de charges variables
Centrale hydraulique
Charges variables
Système d’élévation
Platine de câblage
hydraulique
Le Module de Levage Hydraulique en un clin d’œil
Sections Maintenance Industrielle
Points Forts & Activités Clés : Système simple permettant d’appréhender à faible coût une chaîne fonctionnelle
hydraulique Câblage du circuit hydraulique Câblage électrique par fiches de sécurité Mise en œuvre de la motorisation (réglage dynamique, essais en charge, purge
du circuit hydraulique…) Mesure de position avec capteur linéaire potentiométrique et mesure de pression Montage et démontage mécanique Utilisation du kit hydraulique de l’empileur dépileur de palettes Multitec Programmation, raccordement à un automate en option
Composants Particuliers : Système d’élévation équipé d’un vérin hydraulique double effet (possibilité
d’utiliser le vérin simple effet livré avec Multitec) Limiteurs de pression et de débit Distributeurs monostable 4/2 et 5/3 Coffret de puissance
Références : HD10: Module de levage hydraulique (sans centrale hydraulique et vérin Multitec) HD10-KE50: Module de levage hydraulique (avec centrale hydraulique et vérin
Multitec) HD11: Lot de composants hydrauliques pour travaux complémentaires
Caractéristiques L/ I/ H : 1060 x 750 x 1600 mm Énergie électrique : 400V triphasé Masse : 400 kg
Ce système est accompagné d'un CD dossier technique et
pédagogique
Coffret de commande
Composants hydrauliques
Composants du Module de Levage Hydraulique (sans centrale hydraulique) 2 Manomètres Ø 63 pression de 0-60 Bars 1 Limiteur de pression réglable par volant, modulaire, plage 0-50bar 2 Limiteurs de débit unidirectionnels en ligne G1/4² montage sur face avant 1 Limiteur de débit bidirectionnel en ligne G1/4² montage sur face avant 1 Electrodistributeur, 4/3, 24 VDC 1 Electrodistributeur, 4/2, 24 VDC 1 Electrodistributeur 4/2 24 VDC Vérin double effet Ø 30 course 300 Flexibles, Couleurs, Nourrices
Composants de la Centrale hydraulique 1 Réservoir Tôle 10 L avec bac de rétention équipé de 4 roulettes pivotantes Ø75 1 Moteur électrique 1.1 Kw 1500 Tr/mn 1 Pompe hydraulique à engrenages HPI 3 litres /mn 1 Embase aluminium équipée de limiteur de pression 30 Bars réglable 1 Filtre retour sommet réservoir 20 microns 1 Niveau visuel avec thermomètre 1 Remplissage avec reniflard 1 Vanne de vidange ¼ tour 1 Distributeur centre en H 1 Clapet anti-retour piloté modulaire sur A 1 Limiteur de débit unidirectionnel montage en ligne sur A 1 Isolateur de manomètre sur P 1 Manomètre Ø 63 pression de 0 à 60 Bars 2 Flexible en thermo plastique longueur 1 mètre équipés de coupleurs femelles 8 Litres huiles hydraulique
Composants de l’option « Lot de composants hydrauliques pour travaux complémentaires » - HD11 1 vérin hydraulique SE tige Ø 30 course 300 1 distributeur monostable centre en H 1 distributeur bistable centre en H 1 réducteur de pression à monter en sandwich entre le distributeur
et le bloc foré 1 limiteur de pression à monter en sandwich entre le distributeur et
le bloc foré 1 limiteur de débit à monter en sandwich entre le distributeur et le
bloc foré
Approche pédagogique
Activités pédagogiques Câblage du circuit hydraulique Câblage électrique par fiches de sécurité Mise en œuvre de la motorisation (réglage dynamique, essais en
charge, purge du circuit hydraulique…) Mesure de position avec capteur linéaire potentiométrique et
mesure de pression Montage et démontage mécanique Réglage des courses Réglage des capteurs Réalisation des tests statiques de mise au point ou d’intégration Réalisation de tests dynamiques Recherche de pannes
Travaux pratiques disponibles TP1: Initiation à l’hydraulique
• Identification de composants • Câblage de la partie opérative
TP2: Amélioration d’un bien d’un point de vue maintenance (mise en place du vérin hydraulique) TP3: Exécution d’opérations de surveillance sur la centrale
hydraulique (contrôle et mesures) TP4: Alanalyse du fonctionnement d’un bien hydraulique :
• Etude du schéma • Identification du matériel de protection • Identification des composants, performances, des conditions
d’utilisation, des défaillances
280, rue Edouard Daladier - 84973 Carpentras cedex - France - Tél. + 33 (0) 4 90 60 05 68 - Fax + 33 (0) 4 90 60 66 26
www.erm-automatismes.com - [email protected] MàJ: 20100805

9/10
Objectifs de la Maquette numérique
Plate-forme pédagogique de simulation réaliste En complément du système réel, la Partie Opérative Virtuelle (POV) du
MULTITEC d’ERM offre une plateforme pédagogique de Simulation réaliste qui fonctionne de façon autonome ou en mode connecté à un Automate Programmable Industriel.
Apprentissage des techniques d’automatisation L’hyper réalisme des animations graphiques en 3D de la POV simulée, dont
la géométrie est issue des outils de CAO (Solidworks), permet à l’apprenant d’aborder l’apprentissage des différentes phases d’un projet d’automatisation : • la conception (éditeurs Grafcet ), • a programmation de l’automate, • les essais et la mise en service, • le pilotage du système (pupitre de commande), • la maintenance (possibilité de créer des pannes*), ceci, en toute sécurité pour lui et sans risque de détériorations matérielles.MAI •Fonctionnalités en cours de développement, disponibles dans une prochaine version.
Gestionnaire de ressources pédagogiques
Découverte du système réel facilitée De plus, la Partie Opérative Virtuelle du MULTITEC favorise la prise en
main du système réel ainsi que la découverte des technologies utilisées grâce au gestionnaire de TP intégré qui permet à l’enseignant d’associer très simplement à des objets de la scène 3D des liens hypertextes vers tous types de fichiers externes (documents PDF, Word, sons, vidéos, photos, …) ou applications (logiciels de programmation API, …)
Ainsi, l’utilisateur a la possibilité d’accéder aisément à de nombreuses ressources pédagogiques en le mettant dans une situation de découverte (démarche inductive).
Maquette numérique programmable Multitec Simulateur Dynamique en 3D du système Multitec (Empileur / Dépileur de palettes)
Plus d’informations sur www.erm-automatismes.com MàJ: 20100805
10/10
Fonctionnement
Représentation fidèle du Multitec La Partie Opérative Virtuelle simulée est la représentation fidèle des
comportements électriques et dynamiques temps réel du système Multitec incluant ses capteurs, ses actionneurs et son pupitre de commande.
Programmation avec automate virtuel ou réel L’objectif pour l’apprenant est de programmer la Partie Commande du
système en utilisant soit l’automate virtuel intégré à la POV soit un API connecté à l’ordinateur.
Les informations sont alors échangées entre la POV et l’API via une liaison Ethernet en protocole Modbus TCP/IP.
Principales caractéristiques Représentation graphique 3D fidèle à la réalité, Comportements dynamiques temps réel réalistes, Interactivité totale avec la Partie Opérative Virtuelle, Pupitre de commande virtuel interactif, Editeur GRAFCET conforme à la norme CEI 60848, Editeur de GEMMA*, Visualisation dynamique de l’état des pré-actionneurs dans les armoires
de commande,
Visualisation dynamique des entrées/sorties, Gestionnaire de TP (liens hypertextes depuis la scène 3D), Disponible en licence établissement, Connexion aux API PHOENIX CONTACT et Schneider Electric TSX
Premium et M340 en liaison Ethernet -protocole Modbus TCP/IP, Connexion au simulateur API de la suite logicielle UNITY PRO XL de
Schneider Electric, Connexion avec le logiciel AUTOMGEN via son client Modbus TCP/IP
Maquette numérique programmable Multitec Simulateur Dynamique en 3D du système Multitec (Empileur / Dépileur de palettes)
Visualisation dynamique des Entrées/Sorties
Public visé
Formations initiales ou continues ayant à leur programme
de l’automatisme: En France:
• S option Si • STI Génie Electrique et Génie Mécanique • Bac Pro MEI • BTS Maintenance Industrielle • BTS MAI • BTS Electrotechnique • IUT Départements GMP, GIM, OGP, GEII • Ecoles d’Ingénieurs, Universités • Centres AFPA • AFPI – CFAI
Configuration requise
Configuration matérielle et logicielle requise Micro-ordinateur avec processeur type Core2 Duo à 3 Ghz Carte graphique type NVIDIA 7600 GT ou équivalent Mémoire : 2 Go Mo de RAM minimum Espace disque requis : 50 Mo Lecteurs de CD Rom MicroSoft WINDOWS XP ou Vista
Référence: MN10
280, rue Edouard Daladier - 84973 Carpentras cedex - France - Tél. + 33 (0) 4 90 60 05 68 - Fax + 33 (0) 4 90 60 66 26
www.erm-automatismes.com - [email protected]