Embed Size (px)
Citation preview
Faculdade de Engenharia da Universidade do Porto
Navegação Autónoma
Desafios Técnicos e Tecnológicos
Projeto FEUP 2016/2017 -- MIEIC :
Manuel Firmino e Sara Ferreira José Magalhães Cruz
Equipa 2_Turma 6:
Supervisor: Jorge G. Barbosa Monitor: Pedro Barbosa
Estudantes & Autores:
Ângelo Teixeira [email protected] Henrique Lima [email protected]
Bruno Carvalho [email protected] Hugo Costa [email protected]
Fábio Azevedo [email protected]
Resumo
No âmbito da unidade curricular Projeto FEUP , foi-nos proposta a realização de um
relatório sobre o tema Navegação Autónoma: Desafios Técnicos e Tecnológicos .
Este relatório tem como objetivo específico explorar as seguintes tecnologias ligadas à
Navegação Autónoma: “Google Self Driving Car”, o “Tesla Model S” e o “Amazon Prime Air”.
Queremos, principalmente, para além de explicar o funcionamento de algumas destas
tecnologias, enumerar os principais desafios técnicos e tecnológicos que atualmente as
impedem de ser comercializadas e usadas, e que, se eventualmente superados, os farão
entrar no mercado em força.
Para tal, pesquisamos os projetos que estão atualmente a ser desenvolvidos e
informámo-nos sobre o seu funcionamento, tendo por base a informação disponibilizada
pelos responsáveis dos respectivos projetos. Posteriormente discutimos sobre potenciais
desafios técnicos e tecnológicos adjacentes aos produtos e, sendo que a pesquisa neste
ramo já começou há mais de 50 anos, questionámo-nos sobre o porquê de ainda não ser
tão comum o uso desta tecnologia, que, na teoria, parece ser tão útil e segura para os seus
potenciais utilizadores, dispondo as nossas ideias e conclusões neste relatório.
Palavras-Chave
● Navegação autónoma
● GPS (Global Positioning System)
● Radar
● Sensores óticos (LiDAR)
● Self Driving Car
● Tesla (Model S)
● Amazon Prime Air
Navegação Autónoma - Desafios Técnicos e Tecnológicos 1/17
Índice
Lista de figuras
Glossário/Lista de Acrónimos
1. Introdução
2. Navegação Autónoma em máquinas 2.1 Funcionamento de Sensores Óticos 2.2 Funcionamento de GPS 2.3 Funcionamento do Radar
3. Projetos a ser desenvolvidos atualmente 3.1 Google Self Driving Car 3.2 Amazon Prime Air Drone 3.3 Tesla
4. Desafios Técnicos e Tecnológicos 4.1 Veículos de estrada
5. Soluções Inovadoras 5.1 Conceito de software neste contexto 5.2 Estação de carregamento particular
6. Conclusões
7. Referências bibliográficas
Navegação Autónoma - Desafios Técnicos e Tecnológicos 2/17
Lista de figuras
Figura 1. Exemplo de uma representação 3D da informação recebida pelo LiDAR do
Google Self Driving Car……………………………………………………………………….…6
Figura 2. Triangulação GPS……………………………………………………..……………...7
Figura 3. Funcionamento do radar……………………………………………………..…….…8
Figura 4. Um dos protótipos utilizados pela google no desenvolvimento do projeto...………9
Figura 5. Um dos protótipos do Amazon Prime Air……………………………...……………10
Figura 6. Imagem do sistema de piloto automático do Tesla…………………………….……11
Figura 7. Representação gráfica do conceito de carregamento sem fios……………………13
Navegação Autónoma - Desafios Técnicos e Tecnológicos 3/17

Glossário/Lista de Acrónimos
GPS - Global Positioning system
LiDAR - Light Detection and Ranging
Navegação Autónoma - Desafios Técnicos e Tecnológicos 4/17
1. Introdução
Designamos por navegação autónoma aquela realizada por uma entidade que,
sabendo a sua localização, e sendo dado um destino, é capaz de se deslocar para o
mesmo sem qualquer auxílio ou intervenção exterior, traçando um percurso e realizando-o
de forma completamente independente.
Como exemplo, consideremos um navio que se quer deslocar de um porto A para
um porto B. Numa primeira fase, é necessário saber o percurso que deve ser tomado, tendo
em consideração a distância, políticas de territórios marítimos, a carga e as condições
atmosféricas e marítimas. Estando o percurso definido, a focalização vira-se para o
movimento da embarcação em si: controlo da velocidade e direção, prevenção de colisões
com outros navios ou outros objetos em alto mar, estabilidade do navio, etc. Na realidade,
todos estes fatores de uma viagem marítima são constantemente estudados pelo capitão e
pela sua tripulação, de modo a garantir que a viagem seja confortável, fiável e segura.
Assim, o objetivo da navegação autónoma é deslocar a carga de trabalho do ser
humano, implicada na sua locomoção quotidiana, para a tecnologia. O desafio é criar as
tecnologias que, quando proporcionadas a uma máquina, lhe permita, sem intervenção
humana, tomar decisões inteligentes na realização da sua função.
Navegação Autónoma - Desafios Técnicos e Tecnológicos 5/17
2. Navegação Autónoma em máquinas
Há já algum tempo, cientistas e engenheiros de todo o mundo tentam replicar o melhor
possível em máquinas (robôs, carros, drones, etc.) esta capacidade animal de pensar
enquanto navega e analisar sucessivamente a sua posição em relação ao que as rodeia,
fazendo-as “pensar” e tomar decisões autonomamente. Para isso, são utilizadas tecnologias
como sensores óticos (Lasers, Sensores infra-vermelhos, Cameras), GPS e radares.
2.1 Funcionamento de Sensores Óticos
O sensor ótico mais usado no desenvolvimento de sistemas de navegação autónoma é
o LiDAR, um sistema semelhante ao radar, mas que utiliza radiação laser como substituição
para as ondas rádio (Oxford University Press, 2016). Assim, através de algoritmos,
consegue detetar a presença de objectos e estimar a sua posição relativamente ao sensor
(como observado na figura 1) (Jake Port, 2016).
Figura 1. Exemplo de uma representação 3D da informação recebida pelo LiDAR do Google Self Driving
Car.
Navegação Autónoma - Desafios Técnicos e Tecnológicos 6/17
2.2 Funcionamento de GPS
O GPS é um sistema que através de satélite fornece a um receptor móvel a sua posição
independentemente das condições atmosféricas, funcionando a qualquer momento e em
qualquer lugar da Terra.
O GPS funciona através de uma rede de 24 satélites geoestacionários, distribuídos por
seis planos, próximos da órbita da Terra. (Gabriel Philipe, 2016)
Tanto os receptores GPS como os satélites possuem um relógio interno que marca as
horas com grande exatidão (nano segundos). Assim quando um satélite emite o sinal para o
recetor é também enviado a hora a que este foi emitido, restando ao recetor calcular o
intervalo de tempo que o sinal demorou a chegar e a partir daí determinar a posição exata
em que se encontra. Uma vez que estes sinais são enviados constantemente é possível ao
recetor manter a posição exata sempre atualizada (Gabriel Philipe, 2016)
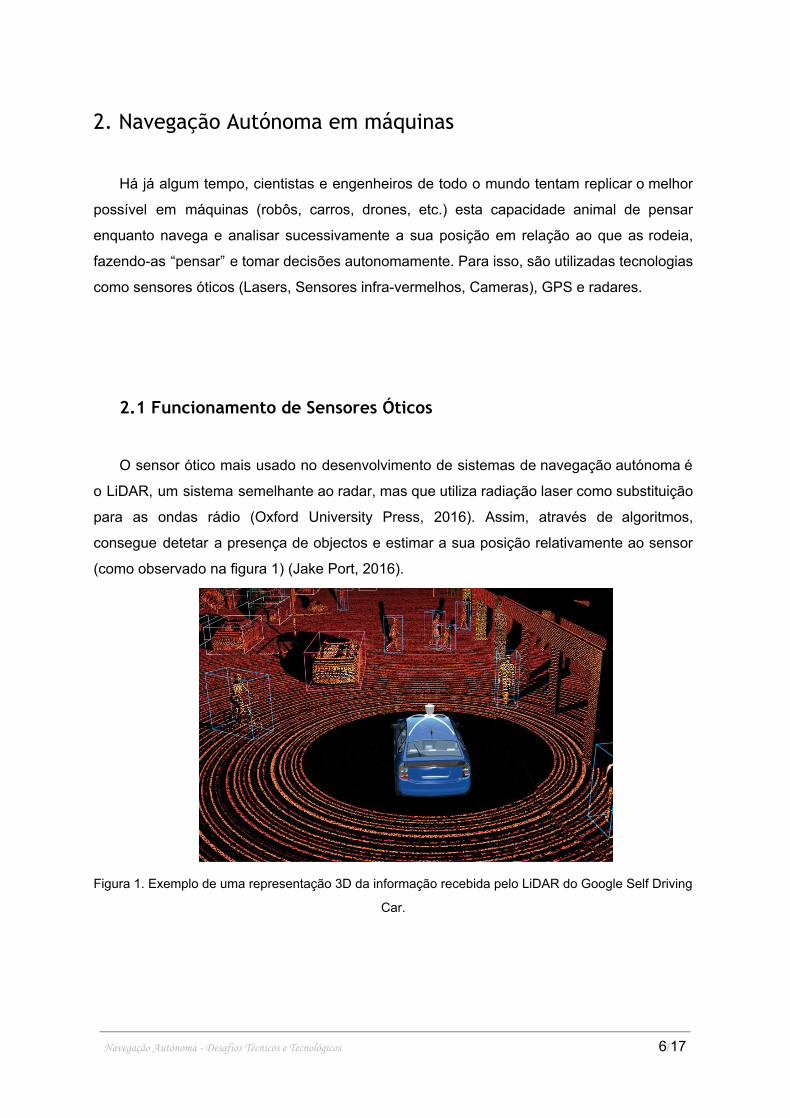
Para que a margem de erro no cálculo da posição seja mínima (cerca de 20m) é usado
um sistema designado por triangulação (Figura 2), no qual são usadas informações de 3, ou
eventualmente 4 satélites, para garantir melhor exatidão quanto à posição do recetor.
Figura 2. Triangulação GPS
Navegação Autónoma - Desafios Técnicos e Tecnológicos 7/17
2.3 Funcionamento do Radar
O Radar é uma tecnologia que permite detetar objetos que se encontrem distantes,
permitindo também calcular a distância desses objetos à antena direcional do rádio.
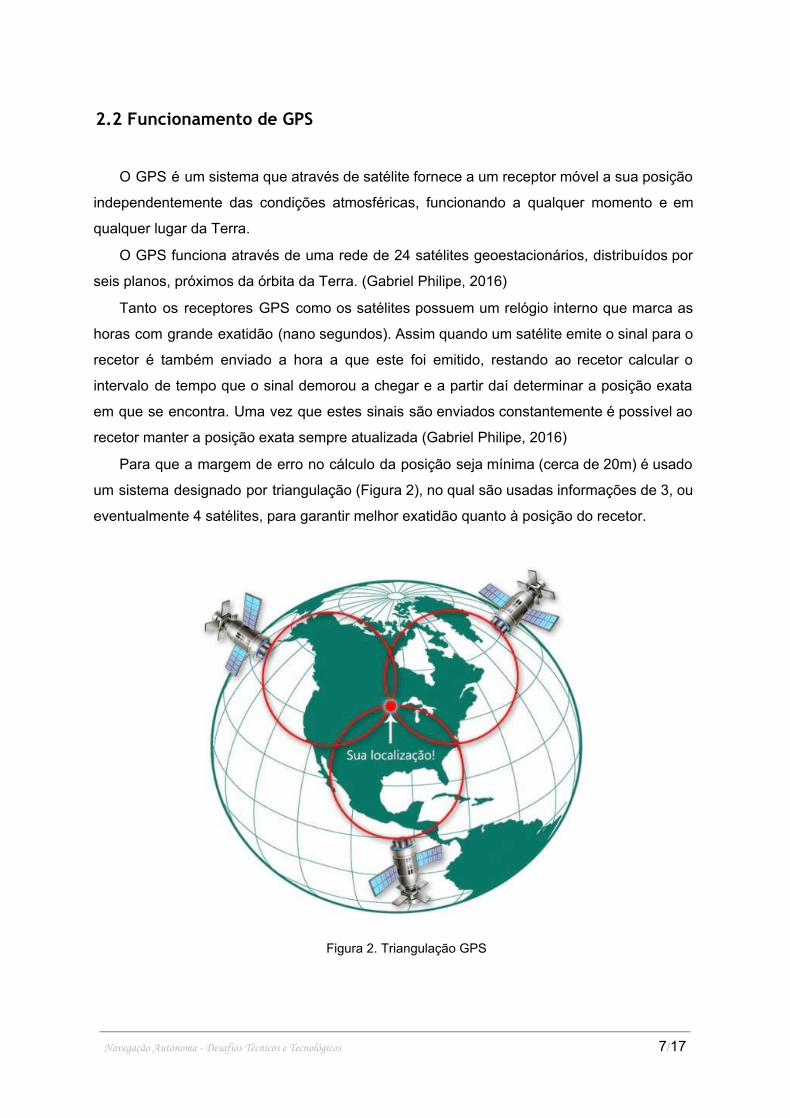
Um radar é composto por uma antena transmissora/receptora de sinais em UHF, sendo
que a transmissão é feita em forma de onda eletromagnética de elevada potência mas de
período reduzido. Ao longo da propagação espacial o sinal vai se expandir em forma cónica,
até atingir o alvo em monitorização, sendo então refletido, regressando à antena, que neste
momento funciona como receptora de sinais.
Uma vez que se sabe a velocidade de propagação da onda, consegue-se através do
tempo de chegada do sinal refletido (eco) calcular a distância ao objeto.
Figura 3. Funcionamento do radar
Navegação Autónoma - Desafios Técnicos e Tecnológicos 8/17
3. Projetos a ser desenvolvidos atualmente
3.1 Google Self Driving Car
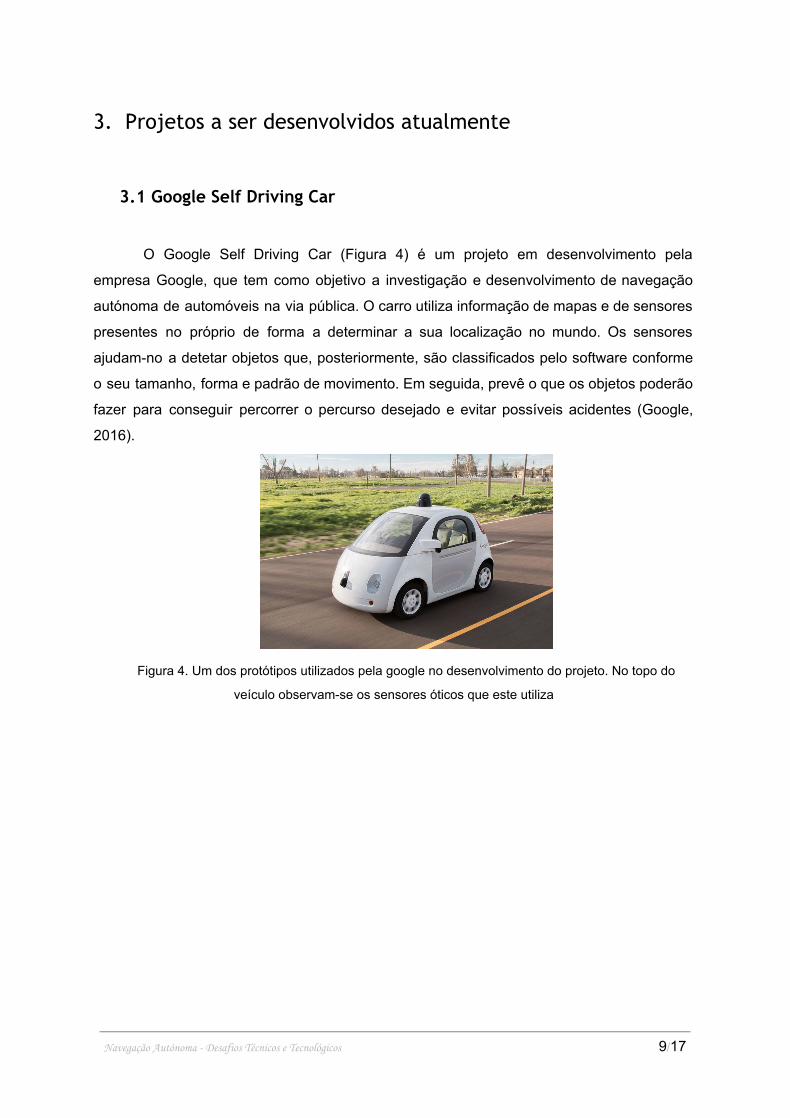
O Google Self Driving Car (Figura 4) é um projeto em desenvolvimento pela
empresa Google, que tem como objetivo a investigação e desenvolvimento de navegação
autónoma de automóveis na via pública. O carro utiliza informação de mapas e de sensores
presentes no próprio de forma a determinar a sua localização no mundo. Os sensores
ajudam-no a detetar objetos que, posteriormente, são classificados pelo software conforme
o seu tamanho, forma e padrão de movimento. Em seguida, prevê o que os objetos poderão
fazer para conseguir percorrer o percurso desejado e evitar possíveis acidentes (Google,
2016).
Figura 4. Um dos protótipos utilizados pela google no desenvolvimento do projeto. No topo do
veículo observam-se os sensores óticos que este utiliza
Navegação Autónoma - Desafios Técnicos e Tecnológicos 9/17
3.2 Amazon Prime Air Drone
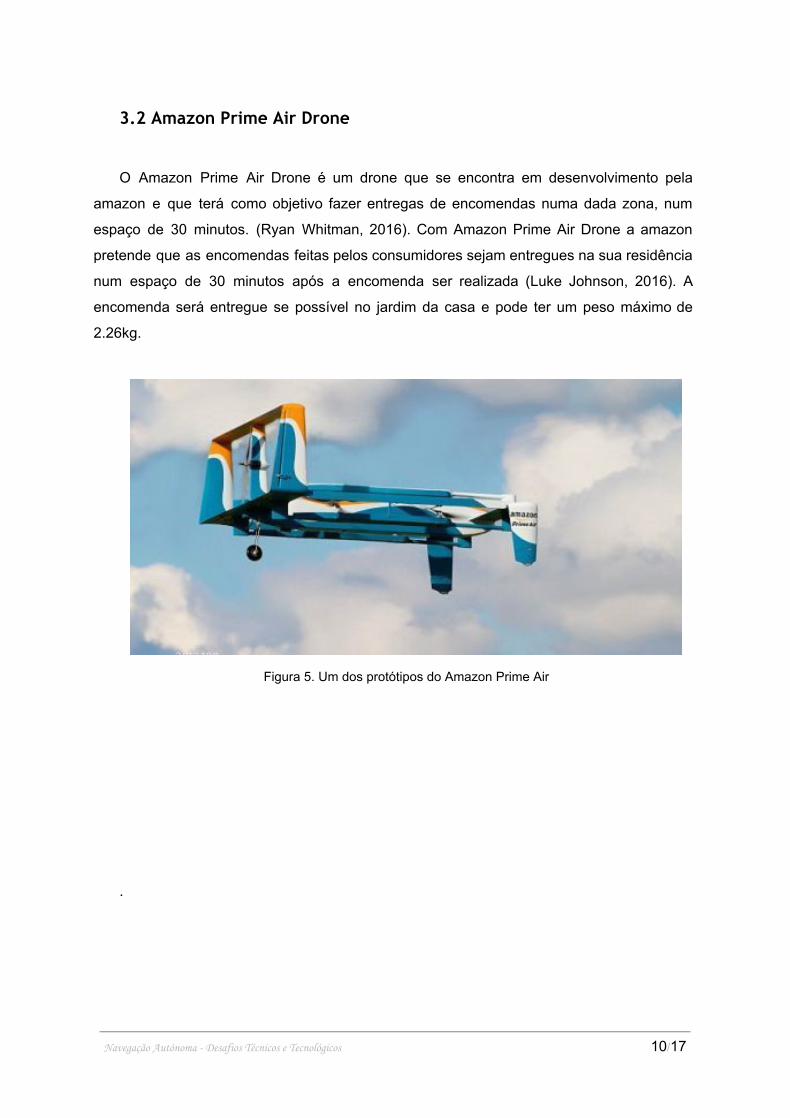
O Amazon Prime Air Drone é um drone que se encontra em desenvolvimento pela
amazon e que terá como objetivo fazer entregas de encomendas numa dada zona, num
espaço de 30 minutos. (Ryan Whitman, 2016). Com Amazon Prime Air Drone a amazon
pretende que as encomendas feitas pelos consumidores sejam entregues na sua residência
num espaço de 30 minutos após a encomenda ser realizada (Luke Johnson, 2016). A
encomenda será entregue se possível no jardim da casa e pode ter um peso máximo de
2.26kg.
Figura 5. Um dos protótipos do Amazon Prime Air
.
Navegação Autónoma - Desafios Técnicos e Tecnológicos 10/17

3.3 Tesla
Tesla é uma marca de carros que tem como base a eletricidade como energia utilizada e
ao mesmo tempo a semi-autonomia dos carros. Semi, pois ainda só é possível usar o piloto
automático em autoestrada. Este sistema de autonomia resulta da instalação de radares no
carro que depois vão servir para detetar os carros, obstáculos e as linhas que definem as
vias que se encontram ao redor do Tesla, fazendo com que o mesmo se desvie, trave ou
mesmo acelere de modo a contornar esses mesmos obstáculos.
Figura 6. Imagem do sistema de piloto automático do Tesla
Navegação Autónoma - Desafios Técnicos e Tecnológicos 11/17
4. Desafios Técnicos e Tecnológicos
4.1 Veículos de estrada
Mesmo com toda a sua potencialidade continua a ser desafiante usar sistemas de
navegação autónoma na prática, pois ainda apresentam vários problemas.
Desafios na captação e processamento de dados O GPS não funciona em túneis, devido ao facto de a radiação eletromagnética não
conseguir atravessar os materiais que constituem a parte superior do túnel e da crosta, e
consequentemente não ser possível a comunicação direta entre o recetor GPS e os
satélites. Deste modo, em túneis subterrâneos complexos, o veículo deve ser capaz de
traçar um mapa do dito cujo, e conseguir determinar, em cada momento, a sua posição
dentro do mesmo.
Outro grande obstáculo é o funcionamento incorreto dos sensores luminosos que,
num ambiente com muita luz, não funcionam perfeitamente. Esta disfunção tem implicações
na operacionalidade fiel do veículo.
Além disto, a navegação autónoma ainda apresenta limitações na comunicação
entre veículos, o que se torna bastante visível numa situação de avaria de um carro, pois os
outros carros que se encontram atrás ou à frente do mesmo não são “informados” dessa
mesma avaria não “sabendo” a razão daquela paragem o que os deixa apenas com duas
hipóteses de ação, ou os carros colidem, ou ficam parados indefinidamente, até o carro da
frente deixar de estar naquela posição.
Por último, mas não menos importante, todos os sistemas informáticos, por mais
complexos que sejam, são corrompíveis e passíveis de perder o controlo sobre as suas
ações, quer por ataques externos, ou mesmo falhas eletro-mecânicas do próprio sistema.
Desafios na programação da Inteligência Artificial A implementação de navegação autónoma em veículos de estrada tem como grande
desafio as inúmeras e difíceis situações com que o veículo se irá deparar na estrada.
Quando o sistema deteta um outro veículo na estrada a realizar uma manobra pouco usual
ou ilegal - por exemplo um jump start , passagem por um semáforo vermelho, condução em
contramão, uma mota a ultrapassar carros entre faixas, etc. - a reação/resposta deve ter a
conta qual a intenção do outro veículo, que tem de ser avaliada. Na estrada são tantas e tão
Navegação Autónoma - Desafios Técnicos e Tecnológicos 12/17
diversas as situações com que um veículo, autónomo ou não, se pode deparar, que é
impossível programar o sistema com o método de decisão perfeito para cada uma das
situações. As soluções mais naturais são: pedir auxílio humano, implicando que o veículo
não seja completamente autónomo; ou criar um sistema avançado de inteligência artificial,
que possa aprender, com a prática, qual o algoritmo de decisão em cada classe de
situações. Quanto melhor o sistema for a lidar com as maioria destas situações, mais
inteligente será a navegação autónoma, de modo que se torna possível evitar mais
acidentes e outras situações de perigo.
5. Soluções Inovadoras
5.1 Conceito de software neste contexto
A nossa ideia fundamenta-se em tecnologia que já existe, contudo, ainda pode ser
melhorada e aproveitada de melhor forma. Assim pensámos num software que conseguisse,
através de uma base de dados, armazenar a posição relativa e operacionalidade dos carros
de modo a que engarrafamentos de carros fossem evitados devido a um planeamento de
rotas prévio feito pelo sistema. Para além disto, consideramos que para os carros serem
verdadeiramente autónomos, terão de “aprender” sozinhos e com experiências reais, pelo
que, com o nosso software, seria possível partilhar esses conhecimentos com todas as
viaturas e, desta forma, tornar a aprendizagem das máquinas mais rápida e eficaz. Num
caso mais prático, o nosso software poderia ajudar, por exemplo, numa situação de
estacionamento automático, na medida em que, estando ligado a um serviço de parques de
estacionamento, poderia saber à partida se há lugares disponíveis e deslocar-se
automaticamente para lá
5.2 Estação de carregamento particular
De forma a melhorar a capacidade dos automóveis de executarem tarefas
autonomamente, sugerimos a criação de um produto de venda individual que consistia na
utilização da tecnologia de carregamento sem fios já existente para permitir ao carro repor a
Navegação Autónoma - Desafios Técnicos e Tecnológicos 13/17
energia gasta quando estacionado num local equipado com este produto. Desta forma, o
automóvel após ser colocado em cima do equipamento (semelhante a um placa) seria
recarregado. Como observado na figura 7, o equipamento induziria um campo
eletromagnético a partir de corrente elétrica, que seria captado por um recetor no veículo em
questão e transformado novamente em corrente elétrica usada para recarregar a bateria.
Figura 7. Representação gráfica do conceito de carregamento sem fios
6. Conclusões
Após a realização deste trabalho, conseguimos perceber que a Navegação Autónoma é
uma tecnologia com grandes vantagens para a vida citadina e apressada, em que todo o
tempo tem de ser bem aproveitado. Assim, é claro que o desenvolvimento desta tecnologia
contribuiria significativamente para um aumento da produtividade em geral, pelo que a sua
melhoria é e deverá ser uma preocupação para os engenheiros de várias áreas.
A sua implementação contribuiria, não só para a redução da quantidade de acidentes,
mas também indiretamente para a felicidade da população em geral, pois o ganho de tempo
e a redução das preocupações reduziria os níveis de stress e, consequentemente a
evolução da sociedade em geral.
Contudo, esta implementação é muito difícil de fazer, pois envolve custos enormes, não
só para a investigação e desenvolvimento, mas também para o utilizador final, pois esta
tecnologia poderá fazer aumentar o preço final de um veículo em duas ou mais vezes.
Em conclusão, achamos que o futuro passa certamente pela navegação autónoma, mas
o caminho até à sua completa implementação ainda é longo devido ao grande número de
desafios a superar.
Navegação Autónoma - Desafios Técnicos e Tecnológicos 14/17
7. Referências bibliográficas
Jake Porto. 2016. “LIDAR: how self-driving cars 'see' where they're going”, Cosmos
Magazine, acedido a 19 de outubro de 2016.
https://cosmosmagazine.com/technology/how-self-driving-cars-can-see-where-they-re-going
Imagem: https://3dprint.com/116569/self-driving-cars-privacy/
“Sistema de Posicionamento Global”, Wikipedia, acedido a 19 de outubro de 2016
https://pt.wikipedia.org/wiki/Sistema_de_posicionamento_global
FIOLHAIS, CARLOS et al. Novo 11F: Física 11º Ano. Texto Editores. 2016
“Radar”, Wikipedia, acedido a 19 de outubro de 2016
https://pt.wikipedia.org/wiki/Radar#Funcionamento
Definição de “Radar”, Oxford Dictionaries, acedido a 19 de outubro de 2016
https://en.oxforddictionaries.com/definition/radar
Imagem:
https://upload.wikimedia.org/wikipedia/commons/thumb/0/07/Sonar_Principle_EN.svg/1280p
x-Sonar_Principle_EN.svg.png
Site do Google Self-Driving Car Project, 2016
https://www.google.com/selfdrivingcar
Ryan Whitwam, “Amazon reveals how Prime Air drone delivery will work, still doesn’t know
how much it will cost”, extremetech.com, 20/01/2016
http://www.extremetech.com/extreme/221517-amazon-reveals-how-prime-air-drone-delivery-
will-work-still-doesnt-know-how-much-it-will-cost
Navegação Autónoma - Desafios Técnicos e Tecnológicos 15/17
Luke Johnson, “9 things you need to know about the Amazon Prime Air Drone delivery
service”, digitalspy.com, 26/07/2016
http://www.digitalspy.com/tech/feature/a775701/9-things-you-need-to-know-about-the-amazo
n-prime-air-drone-delivery-service/
Imagem: https://c2.staticflickr.com/6/5801/22274503931_d4ab7729fd_b.jpg
Navegação Autónoma - Desafios Técnicos e Tecnológicos 16/17





























