Embed Size (px)
Citation preview

New model of polymer entanglement: Localized Gauss integral model. Plateaumodulus G N , topological second virial coefficient A θ 2 and physical foundation ofthe tube modelKazuyoshi Iwata and S. F. Edwards Citation: The Journal of Chemical Physics 90, 4567 (1989); doi: 10.1063/1.456617 View online: http://dx.doi.org/10.1063/1.456617 View Table of Contents: http://scitation.aip.org/content/aip/journal/jcp/90/8?ver=pdfcov Published by the AIP Publishing Articles you may be interested in Some comments on the second virial coefficient of semiflexible polymers J. Chem. Phys. 129, 164902 (2008); 10.1063/1.2969106 Probing the Foundations of Tube Theory: Comparisons Between Model and Experimental Scalings for theRheology of Linear Entangled Polymers AIP Conf. Proc. 1027, 327 (2008); 10.1063/1.2964679 Topological distribution functions and the second virial coefficients of ring polymers J. Chem. Phys. 74, 2039 (1981); 10.1063/1.441249 Second Virial Coefficient of Linear Polymer Molecules J. Chem. Phys. 41, 139 (1964); 10.1063/1.1725612 Random Flight Model in the Theory of the Second Virial Coefficient of Polymer Solutions J. Chem. Phys. 27, 1002 (1957); 10.1063/1.1743923
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

New model of polymer entanglement: Localized Gauss integral model. Plateau modulus G N, topological second virial coefficient A ~ and physical foundation of the tube model
Kazuyoshi Iwataa) and S. F. Edwards Cavendish Laboraotry, Cambridge University, Madingley Road, Cambridge CB3 OHE, United Kingdom
(Received 31 October 1988; accepted 21 December 1988)
The localized Gauss integral (LGl) model, which has been proposed recently by the authors [Macromolecules 21,2901 (1988)], is discussed in detail. Plateau modulus GN is computed as ~ function of polymer concentration c and the topological interaction parameter r. Parameter r is determined for various polymers using their bulk G N data; for polystyrene (PS), r determined from GN agrees well with that determined from the topological second virial coefficient, A ~. Using r determined from GN • A ~ of various polymers other than PS are computed numerically and it is found that A ~ of most polymers are much larger than that of PS. It is further shown that power a to the concentration dependence of GN is estimated to be 1.97-2.12 in agreement with experimental value 2.c~-2.3 and that GN/c;kB T is proportional to A~, where C1 is the number concentration of "localized chains." Finally, LGI model is compared with the Doi-Edwards model and the two basic hypothesis of the latter model, the tensile force along the tube and the rubber-like expression of stress, are examined in view of the present model.
I. INTRODUCTION
Today, viscoelasticity of polymer melts is often discussed in terms of the tube model. This model has succeeded in explaining numerous viscoelastic properties of entangled polymer molecules very well but its physical foundation has not yet been fully established. 1 A more fundamental approach to this problem is to consider topological invariants such as Gauss integral explicitly into the theory. 2.3 Although this approach has a longer history than the tube model, its progress has been limited due to mathematical complexity. Recently, however, some advance has been achieved in the field of rubber elasticity4 and dilute solution properties of ring polymers.5
•6 We have recently proposed a new entangle
ment model, "localized Gauss integral (LGI) model," on the basis of topological consideration of multiple entanglement of polymer molecules.7 The purpose of this work is to present a more detailed treatment of this model and to bridge the gap between the topological model and Doi-Edwards model. It will be shown that the two fundamental postulations of Do i-Edwards model, the tensile force along the tube and rubber-like expression of stress, I are approximately satisfied in the LGI model.
One of purposes of the topological theory is to establish a relationship between entanglement properties and chemical structure of polymer molecules. In usual theories, polymers are characterized by few molecular parameters such as Coo. the characteristic ratio, ;0' the friction coefficient of a segment, and /3, the binary claster integral among segments. Our question is whether it is necessary to introduce a new parameter which relates entanglement properties to chemi-
.) Present address: Faculty of Engineering, Fukui University, Bunkyo 3-1-9, Fuki 910, Japan.
cal structure of polymer molecules. In the viscoelasticity, it is usually assumed that plateau moludus G N (or the molecular weight between entanglements, Me = GN/pkBD is the most fundamental quantity which characterizes entanglement of polymers. 8-10 In the topological theory, the topological second virial coefficient, A ~,5.6 is considered to be another fundamental quantity which represents topological repulsive interaction among ring polymer molecules. These quantities are, however, not molecular parameters since they depend on concentration c, temperature T, or molecular weight M of the systems. One ofthe authors has proposed a parameter called "topological interaction parameter r," which represents entanglement capability of polymer molecules and which is expected to be almost independent of c and T. 5 In the topological theory, r is the only unknown parameter and the same value of r is obtained for polystyrene from their experimental data of G N and A ~. Parameter r of various polymers are determined from their G N in the bulk state, and relationship between r and chemical structure of polymer molecules is discussed in detail.
II. TWO-BODY TOPOLOGICAL DISTRIBUTION FUNCTIONS
Generally, we consider a system composed of two linear or ring polymers, a and b, which are divided into na and nb ap (p = 1,'" ,no) and bq (p = 1, ... ,nb ), each, composed of z main chain bonds. The Gauss integral for polymer pair (a,b) is written as
(2.1)
where 00pbq is the Gauss integral for submolecular pair (ap,bq),
J. Chem. Phys. 90 (8). 15 April 1989 0021-9606/89/084567-15$02.10 @) 1989 American Institute of Physics 4567
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

4568 K. Iwata and S. F. Edwards: New model of polymer entanglement
@apbq = (1/41T) ( ds i ds' Jap bq
[Ra (s) - Rb (s')] [Ra (s) XRb (s')] X~~----~--~~~~------~
IRa (s) - Rb (s'W (2.2)
Ra (s) and Rb (s') are coordinate vectors of the main chains of polymer a and b and the integrations are performed along submolecule ap and bq. Since 9 apbq decreases as R a-;,lq for R apbq -> 00, R apbq ' the relative distance between the centers of submolecule ap and bq, @~Pbq is a short range function of R apbq and is approximated by the following Dirac delta function:
(2.3)
(2.4)
where V is the volume of the system and < ) represents average over the equilibrium distribution of free submolecules. Quantity r is called "the topological interaction parameter for submolecules," which represents how strongly the submoleucles can entangle with each other and is proportional to ZZ for large Z.5(b} Since z can be chosen arbitrarily, we had better consider a z-independent and dimensionless quantity as follows:
r = lim r/ZZb 6 , (2.5) z_ 00
where bo is the Kuhn statistical length per main chain bond. 11 Parameter r is called "topological interaction parameter per main chain bond,"!! which represents entanglement capability of the polymers. By its definition, r depends on the chemical structure such as flexibility or bulkiness of the polymer molecules.
Now, let tPab (t Irab ) be the probability for Gauss integral Tab to take a value between t and t + dt when the distance between the centers of mass of the polymer molecules is equal to rob' It has been shown that tP(t I rob ) is expressed in terms of contact probability among submolecules, C(apbq;ap,bq,;" . I rob ), because @apbq appears always in the squared form and @~pbq is approximated by delta function (2.4). When contact probability is further approximated by superposition of single and double contact probabilities, C(apbq Irab ) and C(apbq;arbq,lrab) tPab (t Irab) is written in the following closed form: (a},5(b)
tPab (t Irab )
= (1 - gab/hab )8(t)
+ (gab/hab)(21Trhab)-1/2eXp( - t 2/2rhab); (2.6)
no nb
gab (rob) = I I C(apbq I rob ) , (2.7) p~ 1 q I
no no nb nb
hab(rab ) = gab 1 I I I I C(apbq;ap,bplrab)' p=lp'~lq~lq'=1
By definition, C(apbq Irab ) and C(apbq;ap,bq Irab ) are given by the contact probabilities of the submolecules of the Rouse (or phantom) model. Their expressions are given in AppendixA.
In the ring polymers, Tab takes only integer numbers, I 0, ± 1, ± 2,"', and probability Pab (llrab ) for Tab to take integer number I is given by5(a),5(b)
(+0.5
Pab(llrab ) = Jr-o.5 tPab(tlrab)dt. (2.B)
For example, the probability of the nonentanglement state (l = 0) is given by P(Olrab ) = 1 - (gab/hab) X erfc( 1/Brhab)' where erfc( ) is the error function defined by
erfc(x) = ([ii/2) 1"" exp( - t 2 )dt. (2.9)
It has been shown that topological distribution function (2.8) agrees well with the result of computer simulation of lattice model polymers. 5
(b} UsingPab (Olrab ) the topological second virial coefficient of ring polymers is written as
A ~ = (NA/2M;) f<gab/hab}erfC(1/.JBrhab ) drab ,
(2.10)
where NA is the Avogadro number and Mr is the molecular weight of the ring polymers. A ~ has been measured by Roovers and Toporowski for ring polystyrene (PS).12 Using their data the topological interaction parameter, r, ofPS has been estimated to be about 0.0029. 5 (C),11 Almost the same r will be obtained from bulk GN ofPS as shown later.
III. LOCALIZED GAUSS INTEGRAL (LGI) MODEL
Entanglements of linear polymer molecules are timedependent variables but, when they are observed in a time scale sufficiently shorter than the disengagement time of the tube model, they will look almost constant. Since we consider only the plateau modulus of linear polymers in this work, we can neglect the motion of the entanglements and assume that their distribution function is given by Eq. (2,6). In applying it to the concentrated polymers, however, there occurs another problem that the Gauss integral (GI) is not a good topological invariant in such highly entangled systems. To show this, let us consider a system composed of concentrated ring polymers, in which the polymer molecules entangle with a number of other polymer molecules simultaneously to form multi-body entanglements as shown in Fig. 1. Such multi-body entanglements can not be classified sufficiently by such two-body invariant as GI. The simplest example ofmuIti-body entanglements which can not be classified by GI is shown in Fig. 2, in which Figs. 2(A) and 2(B) have the same GI, Tab = T be = Tea = 0, while they belong evidently to different topological classes. The larger the number of polymer molecules entangling simultaneously with each other, the less effective GI becomes and the higher topological invariants such as Alexander polynominals must be used to classify their topological states. Since it is difficult
J. Chern. Phys., Vol. 90, No.8, 15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

K. Iwata and S. F. Edwards: New model of polymer entanglement 4569
FIG. 1. Entanglement of concentrated ring polymers.
to introduce such higher topological invariants into the theory, we consider here an approximate model called localized Gauss integral (LGI) model now.
This model is based on the assumption that, when a polymer molecule entangles with number of other polymer molecules simultaneously, its entanglement state will be conserved locally as time average due to mutual interference among neighboring entanglements. Suppose that polymer molecule a, b, ... are divided into "local(ized) chains" ai (i = I, ... ,ma ), bj (j = I, ... ,mb ), ... , respectively, and GI for local chain pair (ai,bj ), Taibj> is defined by
Taibi = L L 0 apbq , (3.1) peai qEbj
where 0 apbq is GI for submolecule pair (a p,b q ) and the summations should be performed over all the submolecules belonging to local chain a; and bj • In the LGI model, it is assumed that each Taibi behaves like a topological invariant as time average, when it is observed in a time scale much longer than "the Rouse relaxation time 1'R ," 1 the time necessary for local configurations to equilibrate, but sufficiently shorter than "the disengagment time of the tube model1'd,"l the time required for the entanglement states to change significantly. To be more precise, it is assumed that T aibj ftuc-
2A 28
FIG. 2. Example of multiple-entanglement states which are not classified by the Gauss integral.
tuates around "quantized" average values, I 0, ± I, + 2, ... due to the constraint on the chain motion of ai and bj
c-;used by neighboring entanglements in ai ± I and bj ± I .
Figure 3 shows various topological states of (a i ,bj ); in order to change the topological state of (ai' bj ), say from state 3B (T b , = 1) to state 3A (Taibi = 0) or 3C (Taibi 2) in Fig. 3, ;~~anglements of a i ± I must be unknitted and, to unknit them, those of ai ± 2 must be unknitted and so on; finally, to change the topological state of (a"bj ), the whole entanglements of polymer molecule a and b must be removed. Since we consider a time scale in which the entanglement states of the whole polymer molecules are kept constant, the topological state of the local chains must be conserved so that the average value of T aibj are quantized as Taibj 0, ± 1, +2, .... - The probability of occurrence of local topological state T .. = 1 P 'b·(Ilr 'b')' is given by Eq. (2.8) in which all the alb] t QI'l at')
quantities concerning polymer pair (a,b) are replaced by corresponding quantities in regard to local chain pair (ai,bj ). As shown later, local chains are so short that the following inequality holds:
Paibj (Olraib) ,>Paibj ( ± ll raibj) ,>Paibj ( ± 2l raibj) '> .... (3.2)
This means that the nonentanglement state (l 0) is most popular, single entwining states (II I 1) occur sometimes but mUltiple entwining states (II I;;;. 2) appear only seldom. We can therefore neglect the difference among the entwining states and consider only two topological states, I 0 (nonentanglement) and 1=1=0 (entanglement). 13 Probability of occurrence of the entanglement state, Eaibj , is given by 1 - Paibj (Olraibj ) or
Eaibj = (gaibj/haibj)erfc(1/~8rhaibj) • (3.3)
By definition, each local chain, say ai' should have at least one entanglement partner, otherwise it should be absorbed into its neighboring local chains, a; ± I , and should be eliminated from the system. We can moreover assume that all the local chains always have one and only one entanglement partner, because entanglement probability Eaibj is so small that the chance for a local chain to have more than one entanglement partner is negligibly small.
By these simplifications, the entanglement state of the whole system is determined by a set of the following quantities:
3A(Tolbj-O)
') ai~ \ t-0J(
/\,-':}/ I
---' I " .... Oi "--J
01-1 f .... PJ It
0 ' f'li " .... W I
(.\ \ t/ .... .,7 "----, ---, \ . " I
3B(TolbJ-1)
FIG. 3. "Quantization" oflocal topological states.
J. Chem. Phys .• Vol. 90, No.8, 15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

4570 K. Iwata and S. F. Edwards: New model of polymer entanglement
{v} = ({vt,{vh, ... ); {vt = (va I>Va2 , ... ) ,
{r} = ({rt,{r}b''''); {rt = (ral ,ra2 , ... ) , (3.4)
&' = [(a;,bj),(Ck,dd, ... ],
where Va; and r ai are the size ( = number of submolecules) and the coordinate of the center of mass of local chain ai, respectively, and &' is the set of the all local chain pairs which are in the entanglement state (l #0). Although we have considered first that Taibj'S are fluctuating around their quantized average values, we should rather consider that entanglement state &' is kept constant (or given) and {r} and { v} are fluctuating around their pseudo-equilibrium values, {r( &')} and (v( &')}. In the LGI model, &' is a kinetic variable, {i} and {v} are functions of &' and all the other physical quantities are expressed in terms of {i} and {v}. Although &' is constant in the time scale considered, it becomes time dependent in the time scale longer than 1" d and so are {i} and {v}. In the LGI model, the principal mode of the Brownian motion is assumed to be something like the reputation motion, but we postpone this problem to future works.
The pseudo-equilibrium conformation of the local chains, {i(&')} and {v(&')}, are determined as follows: Let P( &' , {r}, { v}) be a simultaneous equilibrium distribution function of &', {r}, and { v}, and let the free energy of the whole system be given by - kBTlnP (&', {r}, {v}), then {r( &' )} and {v( &' )} are determined by the following minimization condition,
[aln P lavad = 0,
[ a In PI ar ad = 0 ,
(3.5)
(3.5')
where the derivatives should be computed with &', {r} and { v} kept constant except for r ai or v ai • To derive the expression of P( &' , {r}, { v} ), it is convenient to factorize it into phantom part Pph ({r},{v}) and topological part PlOP (&' I {r},{v} ) as follows:
P( &' ,{r},{v}) = Pph ({r},{v} ) PlOP (&' I {r},{v} ) . (3.6)
PlOP ( &' I {r} , { v}) is the equilibrium distribution function of &' for given {r} and { v} and it is normalized to unity when it is summed over all possible &' . Since there is no topological restriction on Pph ( {r}, { v} ), it is equal to the equilibrium distribution function of the ordinary Rouse (or phantom) model,
Pph({r},{v}) =const X exp[ - (3Izb~)-1
X L (rai - r ai + 1 )2/(vai + v ai + I)] . ai;all
(3.7)
Now we assume that PlOP ( &' I {r}, { v}) is given by a superposition of entanglement probability Eaibj and nonentanglement probability 1 - Eckdl as follows:
PlOP (&' 1 {r},{v} )
= [ II Eaibj ] [ IT (1 - Eckdl )1 ' (ai,bj)eg> (ck~t,*g>
(3.8)
where multiplication II (ai,bj )E&', should be performed over the all entanglement pairs and II(ck ,dl )E£&'. over all the nonentanglement pairs.
IV. EQUILIBRIUM CONFIGURATION OF POLYMER MOLECULES
In the LGI model, physical quantities, such as A, are computed as follows: First the pseudo-equilibrium conformation of the local chains, {V( &')} and {i( &' )}, is determined by Eqs. (3.5) and (3.5'), second A (&') is computed as a function of &' using these {i ( &' )} and {V( &' )} and finally A ( &' ) is averaged over an appropriate distribution of &'. For example, the square of the end-to-end distance of polymer molecule a, 1 i al ( &') - i am ( &' ) 12
, should give zna b ~ when it is averaged over the equilibrium distribution of &' (m is the number of local chains in polymer molecule a); i.e.,
(4.1 )
where na ( = ~iVai) is the number of submolecules in polymer molecule a. Calculation of such an average is, however, difficult in general cases and in order to avoid this difficulty, physical quantities are calculated using the most probable valuesof{v} and {i} which satisfy Eqs. (3.5) and (3.5') and are consistent with the equilibrium conditions such as Eq. (4.1 ).
The number oflocal chains in each polymer molecule is fluctuating due to rapid creation and annihilation of local entanglements at the ends of the polymer molecule. In the equilibrium state, the average number of the local chains per polymer molecule, iii, or the average length of the local chains, v, is determined by the condition that the average number of entanglement partners, N, is equal to unity; i.e.,
N(v) = 1 . (4.2)
As shown in Fig. 4, configuration of (ai' bj ) is determined
FIG. 4. Geometry of local chain pair (ai, bj).
J. Chem. Phys., Vol. 90, No.8, 15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

K. Iwata and S. F. Edwards: New model of polymer entanglement 4571
by the sizes and the positions of the centers of six local
chains, ai' ai ± I' bj and bj ± l'
{r}albj = ({rtj>{rhj ); {rt; = (ral_l>ra;,ral+ 1) ,etc.
{ V tlbj = ({ V ti' { v hj ); {v} al ( Vai _ 1 ,v ai' Val + 1 ) ,
etc.
The average number N( v) is then given by
N(v) =C1 fEalbj({r}aibj)PPh({r}albj)d{rtibj, (4.3)
where C[ is the number of the local chains per unit volume. To determine the pseudo-equilibrium conformation of
the local chains, it is convenient to introduce vectors lal = r ai + I - raj> dalbj = r bj - r ai etc. and express the conformation of (ai, bj) in terms of d albj Idaibj I and intramolecular polar coordinate (fal' eai , <Pai)' where fa; = Ila; I, cos ea; = lai . la; 1 /faJai _ l' and <Pai is the internal-rotation angle between lai and lai _ 2 about lai _ 1 (see Fig., 4). For simplicity, we neglect fluctuation of la!> eai , Vai and d aibj and assume that they take the same values for the all local chains; i.e.,
lai=l, eai (J, vai=v, daibj=d. (4.4)
Although fai and eai are fixed to their most probable values, the polymer molecules can still take random conformation due to the degree of freedom in regard to <Pai' It must be noted that although fluctuation of the number oflocal chains in the polymer molecules, {m} = (ma,m b , ••• ), has been neglected, it may play some role in the vicinity of critical molecular weight Mc or of critical concentration Cc between the entanglement and nonentanglement region, because {m} is expected to fluctuate largely in these regions. The present results should therefore be applied to well-entangled systems. In this simplified model, Eq. (4.1) is rewritten by
[2(1 + cos (J)/O - cos (J) = vzb~ . (4.5)
Now let us find the expression ofEqs. (3.5) and (3.5') under condition (4.4). When simplification (4.4) is introduced, the pseudo-equilibrium conformation of (ai,bj )
must be as shown in Fig. 4 due to the symmetry of the system. This conformation is specified by four variables I, {J, d and a, where a is an angle between vector lai xlai 1 and lbj X lbj _ 1 • We first rewrite the topological part of the distribution function, PlOP' It is shown in Appendix A and B that Eaibj depends only weakly on Vai ± 1 and rai ± 1 and it may be preaveraged in regard to r a; ± 1 (or lai and lai _ 1 ). By this preaverage, Ea;± lck becomes independent ofra; and a. The dependence of Eo; ± lck on Vai is also weak and can be neglected. Then, the relevant part on the right-hand side of Eq. (3.S) in computing BIn Plop/Bvai and BIn Plop/Bra; comes from terms containing E aick and it is written as follows:
(4.6)
(4.6')
where N a ; is the expected number of entanglement partner of local chain a I'
N a; I Ea;ck' ck;a/l
(4.7)
In getting the right-hand side ofEq. (4.6'), we have considered that Eaick is far smaller than unity. Since exp( - Nai + Ea;b) on the right-hand sideofEq. (4.6') originates in the nonentanglement probability 1 - Eaick, N a; represents the topological repulsive potential on local chain ai caused by its surrounding local chains; Eaibj in the exponent on the right-hand side of Eq. (4.6') represents a hole made by local chain pair (a i ,bj ) itself in the respulsive potential field, N ai . Although Nai depends weakly on the conformation of the surrounding local chains, it may be preaveraged over their configuration; i.e.,
Na;,::::-c[ f Eaicd{r}ai,{rtk)Pph({rtk)d{r}Ck' (4.S)
where c[ is the number of local chains in unit volume. As shown in Appendices A and B, Nai depend only weakly on fai
and fa; _ 1 and it may also be preaveraged in regard to them; hence we find
(4.9)
Using Eq. (4.6), Eqs. (3.5) and (3.5') are now rewritten as follows:
3[2/2zvb~ + EY(l + 1/E) - NY = 0, (4.10)
- (61 /zvb ~ )cos(e /2) + E"'(l + 1/E) 0, (4.11)
whereEu and~ (u = dorv) arederivativesofEalbjandNin regard to u at point (4.4); the first term on the left-hand side of Eqs. (4.10) and (4.11) comes from the phantom part of the distribution function, Pph '
Now it is convenient to change the unit of length to (zv) 1/2bo and use the following parameter Xin place ofr:
X= (Sr)-1/2(ZV)-1/4. (4.12)
[Note that X is the value of Xaibi ' which is defined by Eq. (B3) in Appendix B, at point Vai = vbj = v.] In most systems, X takes a value between 0.5 and 1.6. With use of Eq. (4.2) and the expression of E, Nand their derivatives given in Appendix B, Eqs. (4.5), (4.10), and (4.11) are rewritten by
[2(1 cos (J)/(l + cos e) = 1 , (4.13)
3[2/2 X? (1 + 1/E)/S - (3/4 - XNx /SN) = 0, (4.14 )
- 61 cos( e /2) + E"'(l + 1/E) = 0 , (4.15 )
where NU and EU are derivatives in regard to u( = X or d). These equations contain three unknown variables (1, (J, d) and one unknown parameter, X. Then, 1, d, and {J can be solved numerically as functions of X and the result is summarized in Table 1. This result shows that 1 and e are roughly constant (12 = 0.495 - 0.579, (J = 70.3· - 74.5·), while d changes considerably (d 2 0.261-0.124). We may, however, consider that the pseudo-equilibrium configuration of the local chains are almost constant in any system, because variation of d leads no significant change in the final result. It is important that entanglement probabilities, Eaibj , are far smaller than unity and relationship (3.2) is satisfied for I, e, and d determined here.
J. Chem. Phys., Vol. 90, No.8, 15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

4572 K. Iwata and S. F. Edwards: New model of polymer entanglement
TABLE I. Equilibrium conformation of the local chains, aN,E, and A f as functions of x.a
X" Fe d 2c () (degree) G:.Jd
0.5 0.4953 0.2611 70.27 0.4953 0.6 0.4986 0.2459 70.45 0.4986
(0.5003)e (0.2408)' (70.55)e (0.5003 )e 0.7 0.5034 0.2306 70.73 0.5034 0.8 0.5096 0.2155 71.04 0.5096 0.9 0.5169 0.2010 73.43 0.5169 1.0 0.5251 0.1872 71.86 0.5251 1.1 0.5340 0.1745 72.32 0.5340
(0.5327)e (0.1777)e (72.25)e (0.5327)e 1.2 0.5431 0.1622 72.77 0.5431 1.3 0.5523 0.1511 73.24 0.5523 1.4 0.5616 0.1410 73.69 0.5616 1.5 0.5705 0.1317 74.13 0.5705 1.6 0.5788 0.1236 74.53 0.5788
(0.5766)e (0.1295)e (74.42)e (0.5766)·
a V = 10 for local chains and V = 20 for ring polymers. bX= (8y)-1/2(ZV)-1/4.
e (unit oflength) = (zv) 1/2bo.
daN = a:.J + ay,J + a~; a~ comes from d i .
• Computed for v = 20.
v. STRESS AND PLATEAU MODULUS
Let us consider a system composed of particle i, j, ... which are interacting with one another by two-body force fij' Stress tensor (T of the system is given by
(5.1 )
where r ij is the relative position vector between i and j.l When the stress is observed in time scale T, rij and fij are replaced by their time averages in T. In the LGI model, Tis T R « T < T d' the particles are the local chains, the coordinates are their pseudo-equilibrium positions, {r}, and the forces are given by the derivatives of the pseudo-equilibrium free energy, - kB TIn P( &' ,{r}, {V}), in regard to {r}.ltisconvenient to introduce new variables for the size of the local chains,
Pai = (Vai + 1 + vai )/2. (5.2)
(Note that the equilibrium value ofpai'P' is equal to v.) The average forces are then given by
f~;lkBT= 3la;lzPaib~ + F~i' (5.3)
t:/kBT= F~i , (5.3')
where the first term, 31a;lzPaib ~, on the right-hand side of Eq. (5.3) comes from the spring force of the Rouse model and F~i (u = l,d)is the topological force acting on local chain ai,
F~/ k B T = - a In ~ib/ au; u = lai>daibj ,etc. (5.4)
Strictly speaking these equations contain a minor approximation; namely, if f..i or t:i were real two-body forces, they would be parallel to la; or da;bj but, as a matter off act, spring force 3Ia/zPa;b ~ satisfies this condition exactly and F~i> almost exactly but the direction of F~; deviates slightly from
G I2d N ay,Jd GN E, Af
0.1684 - 0.0721 0.5922 0.3685 0.2809 0.1662 -0.0702 0.5948 0.3167 0.2478
(0.1664 )e ( - 0.0708)e (0.5959)e 0.1643 - 0.0683 0.5989 0.2696 0.2173 0.1629 - 0.0665 0.6048 0.2274 0.18938 0.1621 - 0.0643 0.6121 0.19003 0.16417 0.1621 - 0.0630 0.6210 0.15744 0.14162 0.1626 - 0.0613 0.6312 0.12936 0.12161
(0.1637)e (- 0.0619)· (0.6305)e 0.1640 - 0.0597 0.6422 0.10546 0.10399 0.1661 - 0.0581 0.6544 0.08533 0.08861 0.1690 - 0.0566 0.6670 0.06857 0.07525 0.1727 - 0.0551 0.6803 0.05474 0.06372 0.1773 - 0.0536 0.6942 0.04344 0.05381
(0.1765)" ( - 0.0542)e (0.6906)·
that ofla;. We can nevertheless use Eq. (5.1), because F~; disappears when the preaverage in regard to la; and la; _ 1 is preformed as shown in Appendix B. The stress of the system is thus written as
ai
(5.5 )
(5.5')
(5.5" )
where (Tl comes from the spring force of the Rouse model and cr, from the topological force.
The stress given by Eq. (5.5) is a function of &' and it should be averaged over an initial distribution of &'. When simplification (4.4) is introduced, however, this averaging process can be omitted. Suppose that the system, which is initially in the equilibrium state, is suddenly deformed affinely and then left for free relaxation until the pseudo-equilibrium among the local chains is re-established. Generally &' changes in this process but, in this work, we consider only an infinitesimal deformation so that the initial entanglement state is kept constant even after the relaxation. In this case the pseudo-equilibrium position of the local chains after the relaxation, {r'}, may be given by the affine deformation of the initial one, {r}; i.e., for uniform shear deformation,
l~i = (/~; + gl ~i> l~;, l~;) ,
d~ibj = (d ~;bj + gd ~;bj' d ~ibj' d ~;bj) , (5.6)
where g is the shear rate. Putting p~; = Va; + Apai> l~i = lai + Alai> and d~;bj = da;bj + Ada;bj' and inserting (5.6) into (5.5') and (5.5"), we find the xy component of stress,
J. Chem. Phys., Vol. 90, No.8, 15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

K. Iwata and S. F. Edwards: New model of polymer entanglement 4573
ai
= (clkBTlb~)[gl!i - (3Iv)(/;i/~;f~flai) +O(g2)] , (5.7)
~Y = (kB T IV) L «(/;i + gl~i)( [F~dY + O(a2 » ai
+ !(d~ibj +gd~ib){[F~;]Y + O(a2)})
= (gc[kBTI3)(IF 1 + !dFd) +O(a2); (5.7')
where Fl andP are the value ofF~i and F~i at point (4.4). In getting the second line of Eq. (5.7'), we have considered that F~i and F~i are almost parallel to lai and daibj . Hereafter the first and second term of u~Y and the first term of ~Y are designated by symbols u~!, u~; and ~!, respectively. As shown later, the principal term of the stress is u~!; u~; and ~!, are much smaller than u!! and all the other terms are so small they can be safely neglected.
To compute u~;, we first calculate alla;, and alai and so on; with use ofEq. (5.6), alai and adaibj are given by
alai = (gl~i' 0, 0) ,
adaibj = (gd~ibj' 0, 0) . (5.8)
Hereafter the unit oflength is changed to (ZIl) 1/2bo again. To compute allai' Eq. (3.5) is rewritten as follows:
(31l121l~i)/~j = -a In E!;bjlallai -alnE!i+lcklallai' (5.9)
wherebj andck are the entanglement partnerofai andai + I'
Expanding both sides ofEq. (5.9) into power series in ~, M and ad, and neglecting O(a2
), we find
(3Fljl)(Matll- allatlM
all a; + IFI"I' + 2allaiFI'I' + ~ai IFI'I"
+ alai + IFl"d + 2ala,Fl'd + ala;_IFI"d
+ (adaibj + adai + Ick )Fl'd
+ (terms in regard to bj and c k ) ,
(5.10)
where FI'V (u, V = 11, I, etc.) are second order derivatives of - In E!ibj in the equilibrium state; namely
FUV = _ (a 2 In E!ibjlauav) e ;
1l=lla;' 1l'=llai-I' (5.11)
1= lail I' = lai_I' d = da1bj> etc.
Similar equations as (5.10) are obtained for ai ± I, ai ±2'"'' and ~ai' S are in principle given by solving these equations. What is required in the calculation of u~; is, however, (I;J~i~ai) rather than ~ai itself. Generally we compute quantity Ym = (/;J~Allai+ m)· When M aj , alai' and adajbj are mUltiplied by I ~J ~I and averaged, they all disappear except for the following quantity:
(l~J~ialaj) = gP/15 for i =j. (5.12)
Multiplying l~i + ml~i+ m on both sides ofEq. (5.9) and performing average ( ), we get an infinite series of equations in regard to Y m :
Form =0,
(3}2ljl)(gI2/15 - Yo!fl) = 2YoFI'I' + 2Y1FI'I" ,
for m>l,
- (3}2ljl2) Ym = Ym _ IFI'I" + 2Ym FI'I' + Ym + IFI'I" .
The solution is
Yo = (gI4/1OjlFI'I'')/.JA 2 - 1 ,
Ym = [.JA 2 - 1 - A ] m Yo,
A = (3}2/2jl2 + FI'I')IFI'I" .
(5.14 )
With use of this solution, u~; is given by - 3c[kB TYo . Finally the plateau modulus per local chain measured in kB T unit, 0N( = uxylgc[kBD, is given by
- (314/1O;?)/.J (3}2/2;? + FI'I') 2 _ (FI'I")2 ,
(5.15)
where the first, second and third term on the right-hand side f II -21 d 12 ' I' . h' come rom uXY ' u;,y. an uXY ' respective y; tn gettmg t 1S
equation, we have used equation fi = v.
VI. PLATEAU MODULUS GN • TOPOLOGICAL SECOND VIRIAL COEFFICIENT A~ AND TOPOLOGICAL INTERACTION PARAMETER Y A. Plateau modulus GN
Under the simplified condition (4.4), pi, pi. P and PI' which appear on the right-hand side of Eq. (5.15). are reduced to
F[=O, Fd=~(1 +rl), FIJ-I' = FI'I" = Fvv = Evv(1 + E- 1 ) _ (EV IE)2 _ Nvv.
(6.1 )
where expressions of~, £v, £vv and Nvv are given in Appendix B. When Eq. (6.1) is introduced into the right-hand side ofEq. (5.15 ), ON becomes a function of (1, d, 8, X). Since I, d and 8 have been already computed as functions of X, ON can be computed as a function of X. The first, second and third term of ON' which comes from u ll
, trl and U 12 respectively, are computed separately and the results are summarized in columns 5-8 of Table I.
This result shows that the main term of ON is ullgc/kB T, which comes from the spring force of the Rouse model, - kBTalnPph/(Jra;' At first sight, this result may seem to contradict the previous result4 that the modulus of network polymers comes mainly from the topological interaction among strands. We can, however, show that this is just a superficial discrepancy, when we consider the origin of the spring force in the LGI model: Namely, as stated in Sec. III, localization of GI (or segregation of the polymer molecules into the local chains) is introduced as an apoproximate model of many-body topological invariants and, therefore, the spring force between neighboring local chains in LGI model must be considered as an approximate expression of
J. Chem. Phys., Vol. 90, No, 8,15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

4574 K. Iwata and S. F. Edwards: New model of polymer entanglement
the topological force which will act among them when the many-body invariants such as Alexander polynominals are introduced explicitly. The first term, UIl/gc1kBT, is therefore a topological term in nature; hence there is no contradiction between the present and previous result. The second term, cr I / gc I k B T, comes mainly from the topological attractive force among entangled local chain pairs. As seen from Table I, this term is about one third of the first term and gives only a small contribution to the total stress. The third term, u 12
/ gc I k B T, which represents the correction due to redistribution of the submolecules among the local chains under deformation, is far smaller than the first term.
It is remarkable that ON given in Table I is roughly constant (ON :::::0.65). The plateau modulus is thus roughly given by
GN = cl k B TON:::::0.65cl kBT. (6.2)
Quantity Me = cR T / G N is usually considered as a measure of the molecular weight between entanglements (c is the weight concentration of the polymer molecules). The true molecular weight between entanglements (or the molecular weight of the local chains), M I , is given by
MI = ONMe :::::0.65Me ,
which is about two thirds of Me.
(6.3 )
B. Topological interaction parameter per main chain bond :y
Plateau modulus GN has been measured for numerous bulk polymers, for which y can be determined by comparing their experimental and theoretical G N' It is convenient to use (vz) I12bo as the unit oflength and to introduce the following function of X:
where {r} aibj is coordinate {r} aibj expressed in the unit of (vz) 1/2bo. Equation (4.2) is now rewritten as follows:
CI (ZVbo)3E(X) = I . (6.5)
Elimination of Ct( =c/zvMo) and zv from Eqs. (4.12), (5.15) and (6.5) leads to
(GNb~J512kBnr-3 =X6GN(X)/E(X),
(cNAbU8Mo)y-l =X2/E(X),
(6.6)
(6.6')
where Mo is the molecular weight per main chain bond. II Elimination of y from Eqs. (6.6) and (6.6') leads to
(GN/kBn (MoIb~cNA)3 = GN(X) [E(X)]2. (6.7)
Since the left-hand side of Eq. (6.7) contains measurable quantities alone, X can be determined experimentally and so are parameter y using Eqs. (6.6) or (6.6') and X thus obtained. Density p, characteristic ratio C"" and their temperature coefficients, d In p/ dT and d In C", / dT, of various polymers found in literature are given in Table II. Kuhn statistical length bo is given by bo = aoC ::2, where ao is the
average bond length per main chain bond. Plateau modulus GN of bulk polymers are given on the second column ofTable III and parameter y determined using these data are given on the fourth column. In determining y, p and C", are converted, when necessary, into their values at the measurement temperature of GN using the temperature coefficients given in Table II. The numerical values of y given in Table III are slightly different from previous ones,7 because C:" s used in the previous work are slightly different from the present ones. It must be noted that y is sensitive to small variation of C", and an error comparable to the uncertainty in determining C '" must be expected in y given in Table III.
Parameter y is a measure of entanglement capability of polymer molecules and it is defined as the second moment of 0 apbq [c.f. Eqs. (2.2), (2.4), and (2.5)]. Since 0~pbq behaves like IRap - Rbq 1-4
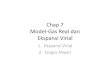
, the main contribution comes from region I Rap - Rbq 1- [minimum distance between submolecules] or y is mainly determined by the diameter of the polymer molecules. To see the relationship between y and the chemical structure of the polymer molecules, we consider yb ~ rather than y itself, because the former has more direct relationship to the second moment, (0~pbq >. Numerical values of yb ~ are given on the fifth column of Table III. This table contains six vinyl polymers, polyethylene (PE), hydrogenated 1,4-polyisoplane (1,4-HPl), hydrogenated polyutadiene-43% 1,2-addition) (l,2Il,4-HPB), polypropylene (PP), hydrogenated 1,2-polybutylene (l,2-HPB) and atactic polystyrene (PS). The diameter of these polymers, measured in unit of the average size of the side groups per main chain bond, increases monotonically from PE to 1,2-HPB (see Fig. 5); yb g decreases monotonically from 0.62 of PE to 0.166 of 1,2-HPB as expected. By close inspection of these data, however, we note two remarkable deviations from this tendency; first, the gap between 0.41 of PP and 0.166 of 1,2-HPB seems to be too large for their chemical structure difference; second, 0.166 of 1,2-HPB is far smaller than 0.36 of PS, while PS has larger side group than 1,2-HPB. These deviations seem to come from the large difference in their characteristic ratios, C'" = 5.5 (l,2-HPB at 373 K) and 8.8 CPS at 463 K); in fact, it seems natural that the polymer molecules can entangle more easily with each other when they expand widely in the space than when they are not. It may be therefore concluded that the smaller the diameter and the larger the characteristic ratio of the polymer molecules, the more easily they can entangle with each other. To remove the expansion effect of the polymer molecules from y, it is divided by b ~ in the definition of y, Eq. (2.5). As seen from Table III, y decreases more smoothly than yb ~ as the average size of the side groups. There is, however, still one exception, PP; in fact, y = 0.0091 of PP seems to be too large for its side group. This large y comes from too large G N and too small C'" of PP in comparison with those of its closest neighbors, 1,2,/1,4-HPB and 1,2,HPB. Parameter y is therefore mainly determined by the diameter of the polymer molecules but it depends considerably on their fine chemical structure. Elaborate computational work will be necessary to get further information on this point.
In the topological theory, chemical structure of the
J. Chem. Phys., Vol. 90. No.8, 15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

K. Iwata and S. F. Edwards: New model of polymer entanglement
TABLE II. Characteristic ratio Coo and density p of various polymers.
dlnCjdT Polymer Symbol Coo (T K) X 10"
polyethylene PE 7.2(373)" _l1b
l,4-polybutadiene X'2 = 0.08, X cis = O. 1,4-PB 5.1(300)< _ l.Of hydrogenated 1,4-polyisoplane 1,4-HPI 6.2(334)" _ 12"
hydrogenated polybutadiene 1,21I,4-HPB 6.4(338)"
x12 0.43
polybutadiene X'2 0.43 1,21I,4-PB 6.1 (289)"
polypropylene atactic PP 5.3(348)'
1,2-polybutadiene X'2 = 0.99 1,2-PB 7.0(306)m
1,4-polyisoplane Xcis 0.75 1,4-PI 5.1(307)< 4.1"
polyisobutylene PIB 6.6(297)b -2.7"
polydimethyl-siloxane PDMS 6.4(301 )P 7.1b
polystyrene atactic PS 1O.7(308)r _l1r
hydrogenated 1,2-polybutadiene 1,2-HPB 5.3(297)m 5.0b
X 12 =0.99
"J. Mays, N. Hadjichristides, and L. J. Fettuers, Macromolecules 17, 2723 (1984). b P. J. Flory, Statistical Mechanics of Chain Molecules (Wiley-Interscience, New York, 1969). C Polymer Handbook, edited by J. Brandrup and E. H. Immergut (Wiley, New York, 1975). d) M. J. Richardson, P. J. Flory, and J. B. Jackson, Polymer 4,221 (1984). <N. Hadjichristides, X. Zhongde, and L. J. Fetters, J. Polym. Sci. Polym. Phys. Ed. 20, 743 (1982).
peT K)
0.855(298)<
0.896(298)'
0.853(293 )'
0.860(298 )a
0.892(298)"
0.827(348)i
0.890(298)"
0.898(298)i
0.890( 423) I
0.970(298)'
0.970(463)'
0.872(298)"
fJ. W. Mays, N. Hadjichristides, W. W. Graessley, and L. J. Fetters, J. Polym. Sci. Part B Polym. Phys. Ed. 24, 2553 (1986). gJ. M. Carella, W.W. Graessley, and L. J. Fetters, Macromolecules 17, 2775 (1984). hF. P. Baldwin and G. Verstrate, Rubber Chern. Technol. 45, 709 (1972). iJ. T. Gorto and W. W. Graessley, Macromolecules 17, 2726 (1984). i Same as poly (ethylene), assumed. k Same as PB ( 1,2) assumed. I L. J. Fetters (private communication). mx. Zhongde, N. Hadjichristides, J. M. Carella, and L. J. Fetters, Macromolecules 16, 925 (1983). n Same as natural rubber (Ref. b), assumed. oJ. E. Mark, and G. B. Thomas, J. Phys. Chern. 70, 3588 (1966). P J. G. Zillox, J. E. L. Roovers, and S. Bynders, Macromolecules 8,573 (1975). qD. J. Plazek and A. J. Chelko, Jr, Polymer 18,15 (1971). rJ. W. Mays, N. Hadjichristides, and L. J. Fetters, Macromolecules 18, 2231 (1985). 'W. W. Graessley and S. F. Edwards, Polymer 22,1329 (1981). tL. D. Rudin, Poly{l-butene}-Its Preparation and Properties (Gordon and Breach, New York, 1968). U Xu and Xci. represent ratio of 1,2- and cis-addition.
4575
dlnpldT X 10'
-7.1d
_ 7.4f
-7.5'
-7.li
_7.Sk
-7.5"
_ 6.6"
-12q
-6.1'
_9.1'
polymer molecules is represented by two parameters, the characteristic ratio, Coo, and the topological interaction parameter, :yo By definition, both Coo and:Y should be independent of the molecular weight or the concentration of polymer molecules, but depend slightly on the solvent and the temperature of the system. To see a typical temperature dependence of:Y, it is determined as function of Tusing the data
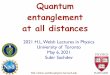
of GN of 1,2-HPB measured by Callera, Graessley, and Fetters in a wide temperature range; 14 the results are shown in Fig. 6, in which :y determined for four polymer samples of different molecular weight are plotted separately. The figure shows that :y deviates considerably among samples, but changes smoothly as Tin each sample; this seems to be natural considering that G N has been determined from the maxi-
J. Chem. Phys., Vol. 90, No.8, 15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

4576 K. Iwata and S. F. Edwards: New model of polymer entanglement
TABLE III. Table of GN (bulk), yand aa.
GN (bulk) TC yb~ Polymerb (106 dyn/cmL) (K) yx1000 (10- 25 cm') a
PE 27.0d 373 8.8 6.2 1.98 1,4-PB 12.5d 300 7.4 2.8 2.03 1,4-HPI 11.4f 373 8.1 4.2 2.05 1 ,21 I ,4-HPB 11.Qd 338 7.0 4.1 2.00 1,2II,4-PB 9.3d 289 6.5 3.3 2.00 PP 8.5" 348 9.1 4.1 2.12 1,2-PB 4.2d 306 5.3 3.6 1.99 1,4-PI 3.5' 298 3.8 1.44 1.97 PIB 3.2f 423 3.7 2.2 1.97 PDMS 2.4" 298 4.7 3.3 2.00 PS 2.0h 463 3.7i 3.6i 1.97
308 3.2i 1,2-HPB 1.9d 373 3.5 0.87 2.00
a Power to the concentration dependence of GN : G N (c) G N (bulk) ~ ; a
is estimated between c = 1.0 and c = 0.1. "Symbols of polymers are defined in Table II. cTemperature at GN measurement. d J. M. Carella, W. W. Graessley, and L. J. Fetters, Macromolecules, 17,
2775 (1984). e J. T. Gorto and W. W. Graessley, Macromolecules 17, 2767 (1984). fL. J. Fetters (private communication). gJ. W. Mays, N. Hadjichristides, W. W. Graessley, and L. J. Fetters, J. Polym. Sci. Part B Polym. Phys. Ed. 24, 2553 (1986).
hW. W. Graessley and S. F. Edwards, Polymer 22, 1329 (1981). i Estimated from GN •
i Estimated from A ~ .
PE
1.4-HPI
1.2/1.4-HPB
PP
1.2-HPB
PS
-c-c-
-c-c-c-cI C
-c-c-C-C-C-C-t I C
-c-cI C
-c-cI C ~
-c-cI
© FIG. 5. Chemical structure of vinyl polymers.
4.0
'" °c
Q 8 c
X
I .... I:;. V
3.5 I:;.
300 350
C
v
c. c.
400
T (K)
c.
1,2-HPB
c. I:;. c.
450 500
FIG. 6. Temperature dependence of Ji for I, 2-HPB; Ji's are determined using experimental data of GN measured by Carella, Gaessley and Fetters (Ref. 14); symbols are 0 for HPBV-O.728L (Mw = 73 000), 0 for HPBV-0.968L (Mw = 109000), 6 for HPBV-2.645L (Mw = 360 000), and \lfor HPBV-3.484L (Mw = 539000) in their paper.
mum of the imaginary part of dynamic modulus, G::' 14
[note that the functional form of G::' (li.I) changes as the molecular weight but it is almost independent of T]. We can therefore expect that the temperature coefficient of r can be determined correctly from a curve for each sample in Fig. 6, although the absolute value of r may contains considerable error. The temperature coefficient of l,2-HPB thus determinedisd In r/dT= - 0.8- - 0.3 X 10- 3
, which is of the same order of magnitude as d In Coo / dT. Although d In r / dT is negative in this polymer, it may be either positive or negative as d In Coo / dT is. The solvent effect of r has not yet been known, but there is no reason to expect that it is far larger than that of Coo' We can therefore expect that r is roughly constant and consider it as a molecular parameter characterizing entanglement of the polymer molecules, as Coo is a molecular parameter determining their dimension.
Concentration dependence of GN
In experiments, the plateau modulus is expressed as
(6.8)
where 4> is the volume fraction of the polymer molecules and exponent a lies in the range 2.0-2.3.8
,9 If GN is proportional to the total number of entanglements and if every contact among polymer molecules has a constant probability of entanglement, as has often been assumed a priori,s,ls GN should be proportional to the square of the number concentration of submolecules, NA P4>/ Mo, or a should be equal to two. In LGI theory, the concentration dependence of GN is given by Eqs. (6.6) and (6.6'); since GN and c are linearly proportional tOX 6GN /E and X 2/E, respectively, a is given by the slope of curve log (X 6GN /E) vs log(X 2/E) shown in Fig. 7. Since the curve has a small curvature, a is estimated as an average in region 1.0:S c:S 1.0, where the most experiments have been done; the results are summarized on the sixth column of Table III. Average a thus determined lies in the range 1.97-2.12, which is roughly consistent with the experimental values, 2.0-2.3.
Since the curve in Fig. 7 has a negative curvature, a
J. Chem. Phys., Vol. 90, No. 8,15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

K. Iwata and S. F. Edwards: New model of polymer entanglement 4577
-= 2 c 8 + z
(!) 01
.s 0 . --' UJ
'" I~ • ?S -2
.3 o 2
Log {X2/ Ed, Log C + const.
FIG. 7. Log-logpiotofX6GN IEvsX2/EandGN vsc. The arrows represent position for c = 1.0,0.1, and 0.03 of polystyrene.
increases as c decreases. This effect has been observed in PS, for which experimental values are a 2.09 in high concentration region 0.1 <;c<; 1.016 and a = 2.3 in low concentration region 0.03 <;c<;O. 1, 10.17 while theoretical values are a = 1.97 and 2.36, respectively, in each region (see Fig. 7); agreement between the theory and experiment is fairly good. It must however be mentioned that another explanation is possible for this effect: de Gennes has shown based on a scaling argument that a is equal to 2.25. 18 Considering that a is near two in the high concentration region and that de Gennes's theory should be applied to semidilute region, a part of the increment of a in the low concentration region might come from the excluded volume effect, which has been neglected in the present theory.
Toplogical second vlrlal coefficient A: In the previous work, r ofPS has been determined using
experimental data of A ~ measured by Roovers and Toporowski. 12 To compare r determined from GN and A ~, the previous calculation5
(c) has been repeated again with slight modification. Following the previous work, Eq. (2.10) is rewritten as follows:
A ~ = (NAb~/2z1/2n;/2M~)A~(X), (6.9)
where A ~ (X) is given by the right-hand side ofEq. (6.4) in which all quantities are replaced by the corresponding quantities in regard to the ring polymers, say, (ai,bj) , by (a,b), ii,
- 8 • by nrC = MrlzMo) , gaib}' by gab and so on; A 2 (X) IS the same quantity as A ~ introduced in Ref. 5 (c) and it is a function of X alone. Numerical values of A ~ (X) are given on the tenth column of Table L By definition, A ~ (X) is formally identical to E(X) and they have similar X dependence as seen from Table L By the least square fitting of the theoretical and experimental A ~ of PS, r = 0.0032 is obtained for C <YO = 10.7 at 308 K. Experimental points and the least
square fitting curve of A ~ are shown in Fig. 8. The present value, r = 0.0032, is slightly larger than the previous one, r = 0.0029S
(C).II; this discrepancy comes from the difference ( 1) in the method of calculating gab and hab and (2) in the C", values used (C co 11.0 is used in the previous work). The value, r = 0.0037 for PS determine~ from GN
(Table III) should be compared with the present r = 0.0032 determined from A~, because in this work E(X), A~(X), and Coo are computed in a consistent way. To compare these r exactly, they must be farther reduced to the same temperature, because they are determined at quite different temperature. At present we do not know the temperature coefficient, d In r I dT, of PS but, if it is positive and the same order of magnitude (10- 3
) as that of 1,2-HPB, such difference as r = 0.0037 (at 463 K) and 0.0032 (at 308 K) is reasonabl~ expected. Within this uncertainty, we can conclude that r determined from G N and A ~ for PS are essentially the same. To make this point more clear, it is necessary to measure G N
and A ~ at the same temperature. For this purpose PDMS would be the best polymer, for ring PDMS has already been synthesized l9 and their GN has been measured at the room temperature. _
Now we can calculate A ~ of the other polymers using r given in Table II; A ~ computed for MJ Mo = 102
- 104 are summarized in Table IV. Among the polymers listed in Table IV, PS is the only one of which A ~ has so far been measured. It is remarkable that GN in Table II and A ~ in Table IV are roughly proportional to each other. We can even show that GN /c2RT is numerically equal toA ~ except for a proportional constant. We start with a hypothesis that a local chain of molecular weight M/ is equivalent to a ring polymer of molecular weight xM" where x is a proportional constant which is determined now. With the aid ofEq. (4.3), we find
-.5
10 ,.... 0 0 +
ON lei
01 -1.0 0
..J
-' UJ z
I(!) 01 0 ..J
-1.5
-.6 -A -.2 0 .2
Log XL, LogXR + 0.055
FIG. 8. Log-log plot ofGNE vs X (white circles) and A r vs X (black circles). When the latter curve is shifted by - 0.075 vertically and by - 0.055 horizontally as shown in the figure, the two curves almost coincide with each other.
J. Chem. Phys., Vol. 90, No.8, 15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

4578 K. Iwata and S. F. Edwards: New model of polymer entanglement
TABLE IV. Table of A ~ calculated for various polymers."
A ~ (10- 5 cm/gr3)
Polymerb C~c nrd = 100 300 1000 3000 10000
PE 7.8 129.7 114.7 87.2 61.8 39.5 1,4-PB 5.1 51.1 48.0 39.0 27.6 18.01 1,4-HPI 6.5 52.4 48.0 37.2 26.7 17.26 1,2/I,4-HPB 6.4 46.9 44.9 36.0 26.4 17.31 1,2/I,4-PB 6.1 40.1 39.2 32.0 23.7 15.66 PP 5.3 33.0 29.2 22.1 15.57 9.94 1,2-PB 7.0 16.92 17.91 15.54 11.96 8.14 1,4-PI 5.1 12.58 15.23 14.70 12.12 8.68 PIB 6.6 8.58 10.47 10.17 8.42 6.04 POMS 6.4 7.84 8.70 7.83 6.17 4.28 PS 10.8 4.03 5.28 5.44 4.68 3.46 1,2-HPB 5.3 5.75 7.21 7.16 6.01 4.36
"In computing A ~, r given in Table III is used; for polystylene, r = 0.0032 which is determined by experimental A ~ is used.
b Symbols of the polymers are defined in Table II. e C ~ is estimated at T = 300 K when d In Coo IdT is available; otherwise,
Coo given in Table II is used without correction. d n, is number of main-chain per ring polymer.
GN(MI)/A ~(xMI)
= (2xI/2c2RnGN(X)E(X)/A~(x-1/4X) , ( 6.10)
where T is the measurement temperature of GN • Figure 9 shows a plot oflog[GN(X)E(X)] vs log X (curve a) and log A ~ (X) vs log X (curve b). When curve b is shifted by - 0.075 vertically and by - 0.055 horizontally, it almost
coincides with curve a; this means that, for x = 1.66, GN(X)E(X)/A~(X-1/4X) is almost constant (= 1.19). Equation (6.10) is then rewritten by
GN/c2RT=3.06A~, (6.11)
for Mr = 1.66M,::::: l.lMe . (6.12)
This equation means that, when condition (6.12) is satisfied, G NC2 R T is proportional to A ~. Since G N is a quite different quantity from A ~ from physical point of view, this is a re-
"'0
X Cl N
<!
o
3~------~--------~--------~~
2.5 3.0 3.5 4.0
Loo (Mr/Mo)
FIG. 9. Molecular weight dependence of A~. The circles represent the experimental data of Roovers and Toporowski (Ref. 12) for ring polystyrene.
markable relationship. Equation (6.11) holds in PS for various Mr and c within experimental error. It is interesting to know how far this relationship is satisfied in other polymers.
VII. RELATIONSHIP BETWEEN LGI MODEL AND 001-EDWARDS MODEL
Finally let us consider the relationship between LGI model and Doi-Edwards model. The latter model is based on the following three postulations: (1) reptation motion, (2) tensile force along the tube, and (3) expression of stress in terms ofthe spring force along the tube. In the LGI model, it is assumed that change of topological states of the local chains starts from the terminal parts and proceeds to the inner parts of polymer molecules. Since this motion is essentially the same as the reptation motion, there is no contradiction between the two models in this point.
To consider postulation (2), it is convenient to introduce the slip-link model,20 which is equivalent to the DoiEdwards model. In the slip-link model, entanglements are represented by small links through which polymer molecules can slip without friction; the contour of the "tube" is represented by a line connecting the links along a polymer molecule [Fig. lO(A)]. Let rai be position vector of link i connected to polymer molecule a and let J.lai be number of submolecules between links a i-I and ai' then the equilibrium distribution function of this model is given by Eq. (3.7) in which vai + vai + I should be replaced by 2J.lai. When the links are fixed in the space, the equilibrium value of J.lai is determined by the minimization condition ofthe free energy, - kBTln Pph; this condition givesJ.lai = 00, since
- kB Ta In pph/aJ.lai
= - (3kB T /zb ~ )(rai - r ai + I )2/J.l~i , (7.1)
is negative except for J.lai = 00. This means that the polymer will get out of the tube by nonreptation motion as shown in Fig. lO(B). To keep the polymer molecule within the tube, it
lOA lOB 10C
FIG. 10. The slip-link modellO(A) and LGI modellO(C). When the tensile force is absent in the slip-link model, the polymer get out of the "tube" by nonreptation motion IO(B). In the LGI model each polymer is surrounded by a wall of the nonentanglement repulsive potential [the hatched area in Fig. IO(C»). In Fig. IO(C), the small black circles represent the centers of local chains and the line connecting them represents the contour of the tube of the LGI model; the broken line connecting the white circles represents the contour of the reduced tube which is equivalent to that of the slip link model.
J. Chem. Phys., Vol. 90, No.8, 15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

K. Iwata and S. F. Edwards: New model of polymer entanglement 4579
is necessary to assume a tensile force, which cancels force (7.1 ), acting along the contour of the polymer molecule; the magnitude of the tensile force is determined by the condition that the mean square distance between links ai and ai + I ,
«rai - rai + I )2)0' is equal to its equilibrium value, zf.laib~. Now, in the LGI model, the entanglement partners behave like the slip links. In this model, vai is determined by Eq. (3.5) or by Eq. (4.14). Thefirstterm on the left-hand side of Eq. (4.14),3/2/2, which comes from force (7.1), makes vai
increase as in the slip-link model but it is balanced by the topological force, - k B Ta In PlOP / av ai' Since /2 is roughly equal toO.5 as seen from Table 1,3/ 2/2 is roughly equal to 3/ 4 and is balanced mainly by 3/4 which comes from the nonentanglement repulsive potential N. In the LGI model, therefore, polymer molecules are constrained in tubes made of repulsive potential N as shown in Fig. to( C). The mean square distance between the centers of neighboring local chains in theGLI model, /2z0.5, is about a halfof/2 = 10f the slip-link model. At first sight, this result may be interpreted that the repulsive potential of the LGI model is weaker than the tensile force of the slip link model so that the former can not keep / 2 at its equilibrium value, unity, but this is just a superficial discrepancy which comes from the difference in the nature of "joints" connecting the local chains in the two models; that is, the joints of the slip-link model are completely free so that average bond angle 8i [see Fig. to(A)] is equal to 90 0, while the joints ofthe LGI model is stiff so that 80 ; is considerably smaller than 90 ° (8 = 70.3°_ 74S), see Table I); in short, the tube of the slip-link (or tube) model is completely flexible while that of the LGI is slightly stiff. Now let us remember that a stiff chain of average bond angle 8 is reduced to a free-joint-chain composed of reduced bonds, each of which is made of (1 + cos 8)/ (1 - cos 8) stiff bonds. The tube of the LGI model can therefore be reduced to that of the slip link model when (1 + cos 8)/( 1 - cos 8) (z2) local chains of the former are equated to a link of the latter. By this reduction, the topological force of the LGI model, - kB Ta In Plop/aVOi> becomes equivalent to the tensile force of the slip link (or tube) model, at least in the vicinity of the equilibrium state.
Now let us turn to postulation (3). Figure 11 (B) shows
UIA)LGI model
LI) dl...,O
{II B)SlIplink model
d-O
FIG. 11. Balance of forces in the LGI and slip-link models.
the balance offorces in the slip-link model, where two spring forces along the polymer molecule are balanced by a force between the polymer molecule and a link. By Eq. (5.1), stress is given by a sum of these three forces multiplied by distances between their force centers but, according to postulation (3), stress of the slip-link model comes from the spring forces alone. Why the forces coming from the wall of the tube can be neglected in the slip-link (or tube) model? This question is answered by considering balance offorces in the LGI model [Fig. 11 (A)] and in the slip-link model [Fig. 11 (B)]. In the expression of stress (5.5 )-(5.5"), 0'1,
which comes from the spring force along the polymer molecules, is common to the slip-link and LGI models, while q2, which comes from the intermolecular topological forces (or which represents the effect of the wall), is neglected in the slip-link model. Neglecting q2 in the slip-link model corresponds to assuming that, in Fig. 11 (B), distance d between force centers of a slip link and a polymer molecule is equal to zero. In the LGI model, d is considerably smaller than / but remains definite; this means that the topological attractive force between entanglement pair (a;.bj ) is much stronger than the spring force between ai and ai ± I' but not strong enough to make a i and bj merge into single particle. In this meaning, postulation (3) is equivalent to the assumption that the force between a polymer molecule and a link is far stronger than the spring force along the polymer molecule. In spite of this difference, the stress-strain relationship is almost the same in the LGI model and the slip-link model, because contribution of q2 to the stress is much smaller than 0'1 (see Table I) and because both terms have similar functional dependence on deformation. In the same reason, it is expected that the stress-optical relationship I is satisfied approximately in the LGI model as in the Doi-Edwards model.
In summary, we may conclude that the LGI model is close to the Doi-Edwards model and, in a sense, the present work presents a physical foundation for the latter model. It must, however, be stressed that, although two models are expected to be almost identical in many rheological and rheo-optical problems, the LGI model is based on a wider and deeper molecular foundation and can present molecular basis of visco-elastic, rubber-elastic and solution properties, which are beyond the scope of the tube model.
APPENDIX A: EXPRESSION OF C(spbq;ap,bq; ... 1 (r}alb/)
LetR= (Ra,Rb, ... ),Ra = (RoO,Rol "")' etc. be a set of the coordinates of the centers of the all submolecules in the system, then the equilibrium distribution function of R is written as
Pph (R) a: IAj3/2exp( - ! R . A . R) , (AI)
where A is the spring constant matrix of the Rouse model. If ~ = (~I'~2""'~m ) is a set of m arbitrary linear combinations of R, ~k :S:k' R(k = 1,2, ... ,m), where :S:/s are constant coefficient vectors, then the distribution function of ~ is given by
Pph (~) = (21T) - 3m/2jBI-3/2exp( ! ~ . B- 1 • ~) ,
(A2)
J. Chem. Phys., Vol. 90, No.8, 15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

4580 K. Iwata and S. F. Edwards: New model of polymer entanglement
where B is a m X m matrix whose (k,i) element is written as
(A3)
A + is the generalized inverse of A. As shown in Fig. 4, conformation oflocal chain pair (a j ,
b·) is represented by a set of vectors, (ra, rb), where r~ = {r} aj = ( raj _ I , r ai' r ai + I ), rb = {r} bi
(rbJ - I ,rbJ ,rbj + I) and ra/s are the coordinate vector of the centers of the local chains. Let sa = (Rap,Rap""') and Sb = (Rbq , Rbq"''') be an aribtrary set of coordinates of submolecules in polymer moelcule a and b, then the equilibrium distribution function of S = (ra, sa, rb, Sb) is given by Eq. (A2) in which matrix B is equal to
where B~, for example, is the submatrix ofB in regard to rO
and sa. Contact probability, C(apbq;ap.bq.; ... lro,rb) is given by replacing Sb by sa + d (d = daibj ), performing integration of Pph (ra,SO,rb,so + d) in regard to sa and dividing the result by Pph (ra)Pph (rb); the result is
C(apbq;ap' b q• ; .. ·Ira,rb)
= (21T/IBI>3m/2 exp ( - ! d' B- 1• d) ,
B B~s + B~s B~r' (B~r)-I . B~s - B~r . (B~r)-I . B~s ,
d (d,d, ... ) +ro . (B~r)-I. B~s -I'. (B~r)-I. B~s' (AS)
where m is the number of the submolecule pairs and (d,d, ... ) is a m-dimensional vector of which elements are aU equal to d.
When C(apbq; ... lra,rb) is rewritten in terms of vectors (Iai' lai _ I , lbj> lbi _ I , dalb) ), where lai = r ai + I - r ai' dOibi
r bi - rai etc., it depends strongly on the relative distance between a i and bj , daibj , but only weakly on the internal configuration of polymer a and b, (loi' lai _ I , lb)' lbi _ I ); this is natural because C(apbq; ... lro
, rb) is the contact probability under the condition that the conformation of the local chains are fixed at rO and rb. Function C(apbq; ... lra,rb) is therefore preaveraged in regard to (lai' lai I , Ibj , lb) _ I ); the result is
C(apbq;ap. b q. ;· .. Id)
= (21T/IBI )3m
/2 exp( - ~ d . B- 1• d) ,
B I I Bapap' + I I B bqbq, , (A6) p p' q q'
where Bapap' is given by Eq. (A3) in which k = a p and lap"
APPENDIX B: CALCULATION OF E.'bJ' N.,. NAND THEIR DERIVATIVES
Functions g aibj' h aibj and E aib} are computed as functions of (ro,rb) with useofEqs. (2.7) and (3.3) and the expression of C(apbq ; ... ) give in Appendix A. Although Nai and N are given by the integrals of Eaibj in regard to ra and/or rb, it is difficult to perform the integrations numerically as they are; hence the preaveraging approximation of gaibj and h aibj in
regard to (Iai' lai_1> lbj' Ibj_I), which is discussed in Appendix A, is introduced. This preaveraging corresponds to use Eq. (A6) instead of Eq. (AS) in the calculation of gaib} ,
h aibj and Eaibj' By this simplification, the numerical integrations become single, which is easily performed, and Nai becomes identical to N [see Eq. (4.9)]. The derivatives of EaibJ and Nai in regard to lai and lai _ I are all equal to zero and those in regard to d are easily computed since C( ap b q ; ... ) has a simple exponential form in d. The derivatives in regard to Poi'S are, however, very complicated and further approximation must be introduced now.
First, gaibi and h aibj are rewritten as follows:
(BI)
When ~2z/ ( Val I + Vb} I) bo is chosen as the unit oflength, gaibi and "aibj depend very weakly on Val and v bj and become independent of them in the limit Vai' V bj --+ 00; to show this, gaibj and "albj are computed as function of d forvai = v bj = 6, 10 and 20 and the results are shown in Table V. Considering these results, we assume that gOibj and "aibj are common for all polymers irrespective of their V oi and V bj' and choose those for V = 10 as the common functions; some calculation has been done for V = 20 for reference, but there is no significant change. Function Eaibj is now rewritten as follows:
Eaibj(daibj,xaibj) = (gaib/haibj)erfC(Xaib/h !{~) , (B2)
X aibj = (8y) 1/2(z2vai v bi ) 1/8, (B3)
where we have assumed rzz2b~y [c.r. Eq. (2.5)]. Since Eoibj depend on Vai through X uibj alone, its derivatives in regard to V ai are given by
EV = -X~/8V, Evv=(9X~+X2~X)/64~, (B4)
where ~ and ~X are the first and second derivative of Eaibj in regard to X uibi ' X[ = (4yvZ)1/2] is the value of X aibj at v ' = Vb' = ;:; and all the quantities should be estimated at p~int (4:4). The derivatives of Eaib) in regard to V oi ± I are all equal to zero. In computing derivatives of Nai and N, we must note that the Jaccobian associated with the scale transformation depends also on Voi; they are given by
TABLE V. Comparison ofg and Ii for v = 6, 10 and 20,'
g h
d /,JzV v=6 v= 10 v 20 v=6 v= 10 v= 20
0.1 2.028 1.986 1.969 3.137 3.203 3.269 0.2 1.702 1.671 1.658 2.627 2.722 2.803 0.3 1.279 1.260 1.252 2.092 2.201 2.295 0.4 0.8678 0.8591 0.8554 1.668 1.776 1.867 0.5 0.5382 0.5358 0.5347 1.367 1.465 1.551 0.6 0.3090 0.3095 0.3097 1.155 1.243 1.323 0.7 0.1662 0.1677 0.1683 1.002 1.081 1.161 0.8 0.0846 0.0861 0.0868 0.886 0.957 1.032 0.9 0.0410 0.0422 0.0427 0.797 0.858 0.929 \.0 0.0190 0.0199 0.0202 0.725 0.778 0.844
• For linear polymers.
J. Chem. Phys., Vol. 90, No.8, 15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38

K.lwata and S. F. Edwards: New model of polymer entanglement 4581
NV (6N - XNX)/8v,
N vv = ( - 8N - 3XfVX + X2NXX)/64VZ , (BS)
where N x and N xx are the value of the first and second derivative of N in regard to Xaibj at point Xaibj = X. Derivatives of N in regard to V ai ± 1 are also zero. It must be noted that, although CI depends on V, it must be kept constant in computing the derivatives in regard to V ai •
ACKNOWLEDGMENTS
The authors appreciate deeply Dr. L. J. Fetters for providing the data in Table I. One of the authors (K. I.) thanks Dr. W. W. Graessley and Professor K. Osaki for valuable discussion on the subject of this work. One of the authors (K.I.) appreciates the Japan Society for the Promotion of Science for financial support in staying at Cavendish Laboratory. This study was supported in part by a Grant-in-Aid for Scientific Research from the Ministry of Education, Science and Culture, Japan for 1986-1987 (No. 60470104).
1M. Doi and S. F. Edwards, The Theory of Polymer Dynamics (Clarendon, Oxford, 1986).
2S. F. Edwards, proc. R. Soc. London Ser. A 419, 221 (1988); 91, 513 (1967); J. Phys. A 1, 15 (1968).
3K. Iwata, J. Phys. Soc. Jpn. 37,1413,1423,1429 (1974).
4K. Iwata, J. Chern. Phys. 83, 1969 (1985). s(a) K. Iwata and T. Kimura, J. Chern. Phys. 74, 2039 (1981); (b) K. Iwata, ibid. 78, 2778 (1983); (c) Macromolecules 18,115 (1985).
6H. Tanaka, J. Chern. Phys. 82, 4707 (1985); 87, 4201 (1987). 7K. Iwata and S. F. Edwards, Macromolecules 21,2901 (1988). sJ. D. Ferry, Viscoelastic Properties of Polymers, 3rd ed. (Wiley, New York, 1980).
"'N. W. Graesseley and S. F. Edwards, Polymer 22, 1329 (1981). 10K. Osaki, T. Takatori, Y. Tusnashima, and M. Kurata, Macromolecules
20, 1681 (1987). "In the previous paper [Ref. 5(c) j, rand bo are defined per repeating unit
of polymers, but in this work, they are defined per main chain bond. When a repeating unit consists of m main chain bonds, previous rand bo should be divided by m -1/2 in this work. For example, r = 0.0041 for PS found in the previous work [Ref. 5(c)j should be modified to r=O.OO4l1 2112 = 0.0029 in this work.
12J. Roovers and P. M. Toporowski, Macromolecules 16,843 (1983). 13Even in this case, we should discriminate state I> 1 and I.;; - 1, but we can
neglect their difference and consider only single entanglement state (/ ;60) because, even if the difference among entanglement states is considered explicitly in the theory, no change occurs in the final expression of the plateau modulus.
14J. M. Carella, W. W. Graessley, and L. J. Fetters, Macromolecules 17, 2775 (1984).
ISG. C. Berry and T. G. Fox, Adv. Polym. Sci. 5, 261 (1967). 16y' Inose et al., Maclomolecules 11, 888 (1978). 17N. Nemoto, H. Odani, and M. Kurata, Maclomolecules 4,458 (1971). ISp. G. de Gennes, Macromolecules 9,587,594 (1976). 10C. J. T. Edwards, R. F. T. Stepto, and J. A. Semlyen, Polymer 23,6591
(1982). 2~. Doi and S. F. Edwards, J. Chern. Soc. Faraday Trans. 274, 1802
(1978).
J. Chem. Phys .• Vol. 90. No.8, 15 April 1989
This article is copyrighted as indicated in the article. Reuse of AIP content is subject to the terms at: http://scitation.aip.org/termsconditions. Downloaded to IP:
131.94.16.10 On: Mon, 22 Dec 2014 16:46:38