Embed Size (px)
Citation preview
N.F. Zhou, KR'12 1
BPSolver’s Solutions to the ASP Competition Problems
Neng-Fa Zhou周 能法
The City University of New [email protected]
Outline
Overview of the ASP competition B-Prolog’s features BPSolver’s winning solutions BPSolver’s hopeful solutions BPSolver’s losing solutions Observations
N.F. Zhou, KR'12 2
Overview of ASP Competition (Model & Solve) Principles
– To foster open comparison of ASP with any other declarative paradigm
– To foster development of new language constructs
– To foster development of new heuristics and/or algorithms
N.F. Zhou, KR'12 3
Overview of ASP Competition (Model & Solve) Participants
– Aclasp (Gringo + Clasp + Gecode)– BPSolver (B-Prolog)– EZCSP (Gringo + Clasp + B-Prolog)– Fastdownward (PDDL)– IDP (grounder Gidl + MinisatID) – Potassco (Gringo + Clasp + Gecode)
N.F. Zhou, KR'12 4
Overview of ASP Competition (Model & Solve) Benchmarks (34)
– P-problems (7)– NP-problems (19)– Beyond NP problems (2)– Optimization problems (6)
N.F. Zhou, KR'12 5
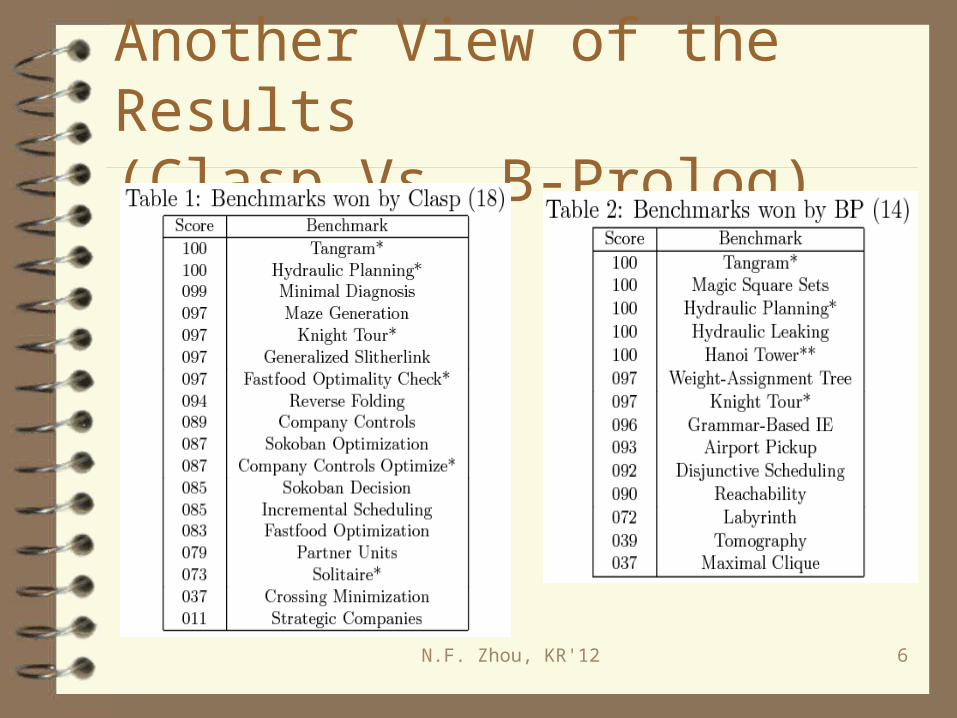
Another View of the Results(Clasp Vs. B-Prolog)
N.F. Zhou, KR'12 6
Overview of the ASP competition B-Prolog’s features BPSolver’s winning solutions BPSolver’s hopeful solutions BPSolver’s losing solutions Observations
Outline
N.F. Zhou, KR'12 7
N.F. Zhou, KR'12 8
B-Prolog =Prolog + Tabling + CLP(FD) Prolog enhanced with
– Array subscripts
– Loop constructs
Tabling– Memorize and reuse intermediate results
• Suitable for dynamic programming problems
CLP(FD)– Constraint Logic Programming over Finite Domains
• Suitable for constraint satisfaction problems (NP-complete)
9
Array Subscripts in B-Prolog
In arithmetic expressions
In arithmetic constraints
In calls to @= and @:=
In any other context, X[I1,…,In] is the same as X^[I1,…,In]
S is X[1]+X[2]+X[3]
X[1]+X[2] #= X[3]
X[1,2] @= 100X[1,2] @:= 100
N.F. Zhou, KR'12
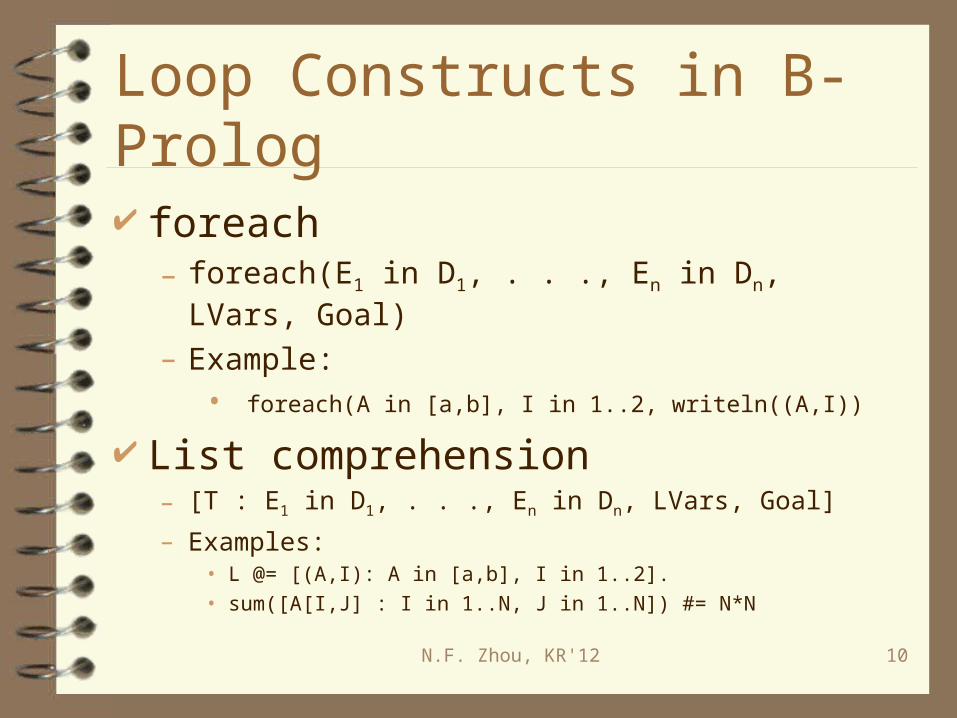
Loop Constructs in B-Prolog
foreach– foreach(E1 in D1, . . ., En in Dn, LVars, Goal)
– Example:• foreach(A in [a,b], I in 1..2, writeln((A,I))
List comprehension– [T : E1 in D1, . . ., En in Dn, LVars, Goal]
– Examples:• L @= [(A,I): A in [a,b], I in 1..2].• sum([A[I,J] : I in 1..N, J in 1..N]) #= N*N
N.F. Zhou, KR'12 10
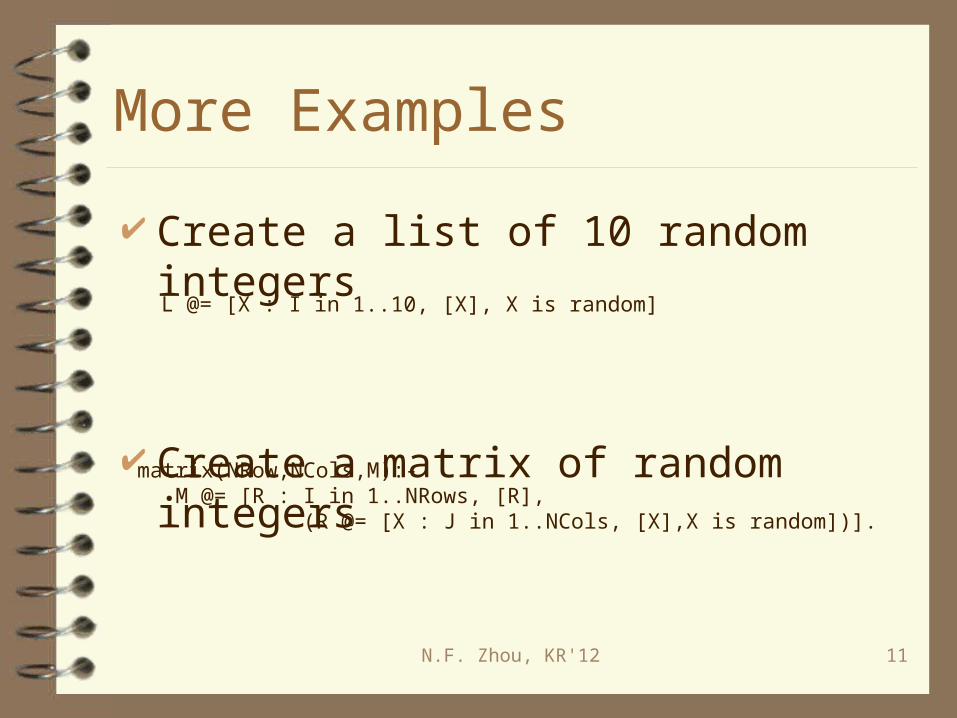
More Examples
Create a list of 10 random integers
Create a matrix of random integers
N.F. Zhou, KR'12 11
L @= [X : I in 1..10, [X], X is random]
matrix(NRow,NCols,M):- M @= [R : I in 1..NRows, [R], (R @= [X : J in 1..NCols, [X],X is random])].
N.F. Zhou, KR'12 12
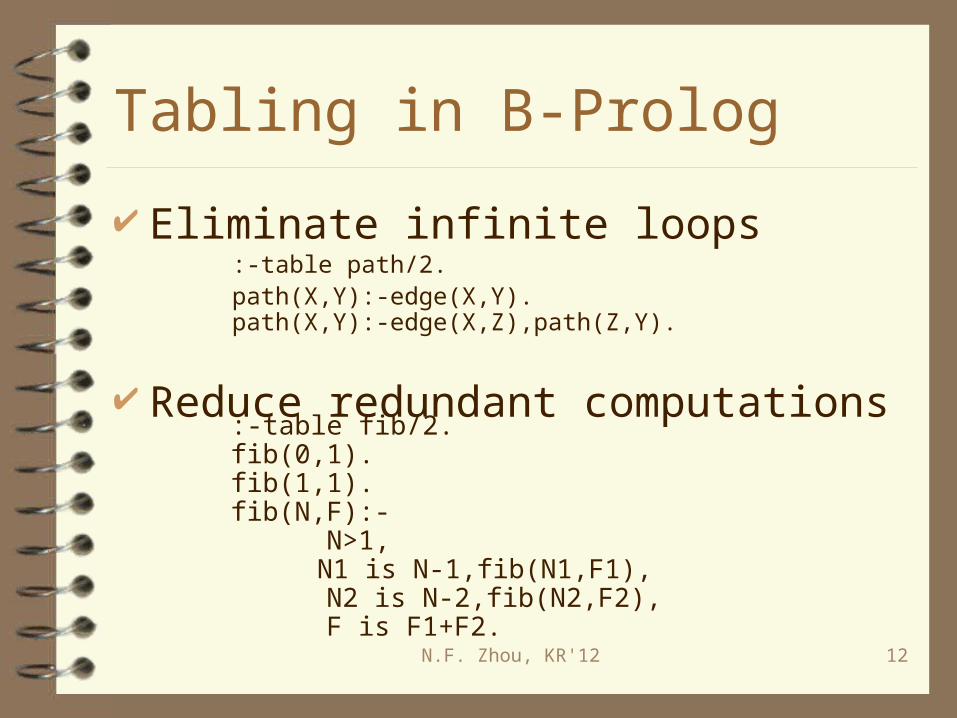
Tabling in B-Prolog
Eliminate infinite loops
Reduce redundant computations
:-table path/2.path(X,Y):-edge(X,Y).path(X,Y):-edge(X,Z),path(Z,Y).
:-table fib/2.fib(0,1).fib(1,1).fib(N,F):-
N>1, N1 is N-1,fib(N1,F1),
N2 is N-2,fib(N2,F2),F is F1+F2.
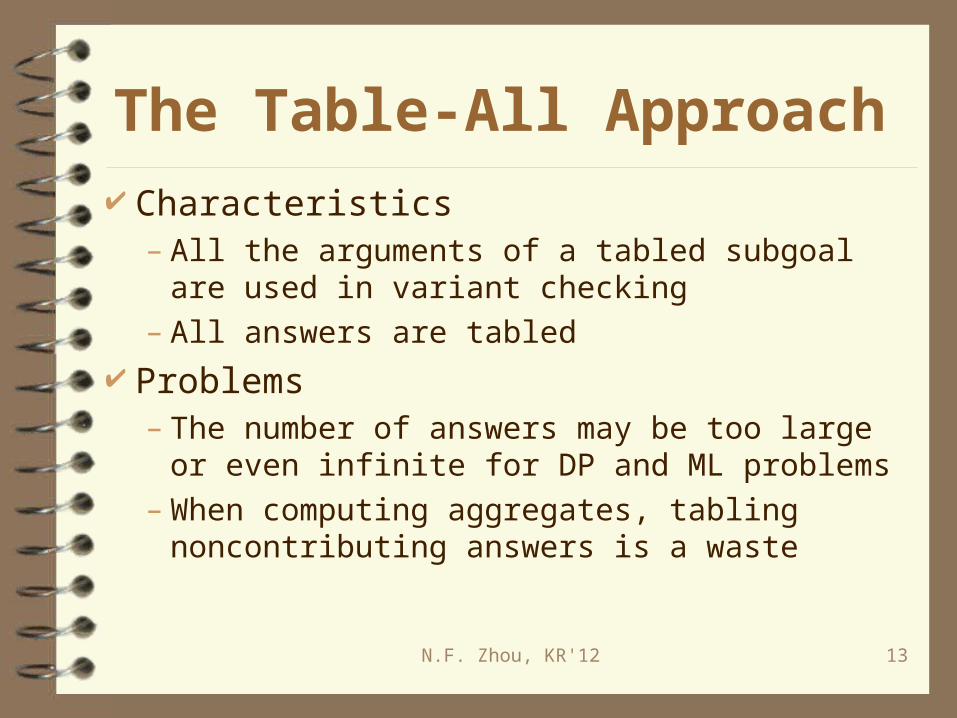
The Table-All Approach
Characteristics– All the arguments of a tabled subgoal are used in
variant checking– All answers are tabled
Problems– The number of answers may be too large or even
infinite for DP and ML problems– When computing aggregates, tabling
noncontributing answers is a waste
N.F. Zhou, KR'12 13
N.F. Zhou, KR'12 14
Mode-Directed Tabling in B-Prolog Table mode declaration
– C: Cardinality limit
– Modes• + : input• - : output• min: minimized• max: maximized
:-table p(M1,...,Mn):C.
N.F. Zhou, KR'12 15
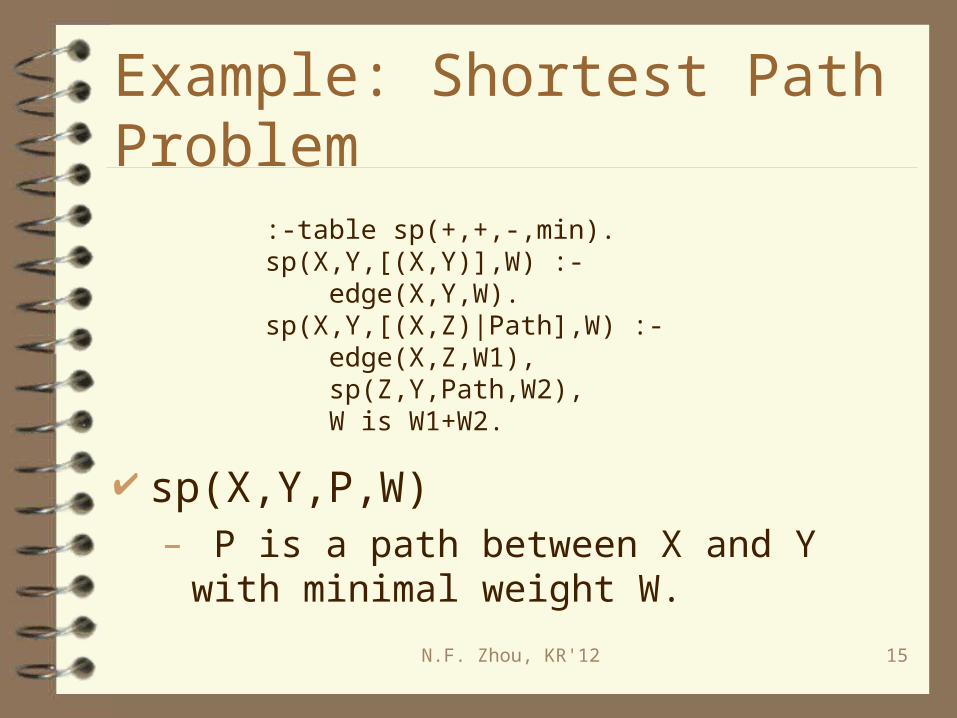
Example: Shortest Path Problem
sp(X,Y,P,W)– P is a path between X and Y with minimal
weight W.
:-table sp(+,+,-,min). sp(X,Y,[(X,Y)],W) :- edge(X,Y,W). sp(X,Y,[(X,Z)|Path],W) :- edge(X,Z,W1), sp(Z,Y,Path,W2), W is W1+W2.
N.F. Zhou, KR'12 16
CLP(FD) in B-Prolog
A rich set of built-in constraints – Unification and arithmetic constraints (#=, #\=, #>,
#>=, #<, #=<)– Global constraints
A glass-box approach to the implementation– All propagators are described in Action Rules
(TPLP’06)– Action Rules is open to the user for describing
problem-specific propagators A rich set of labeling options
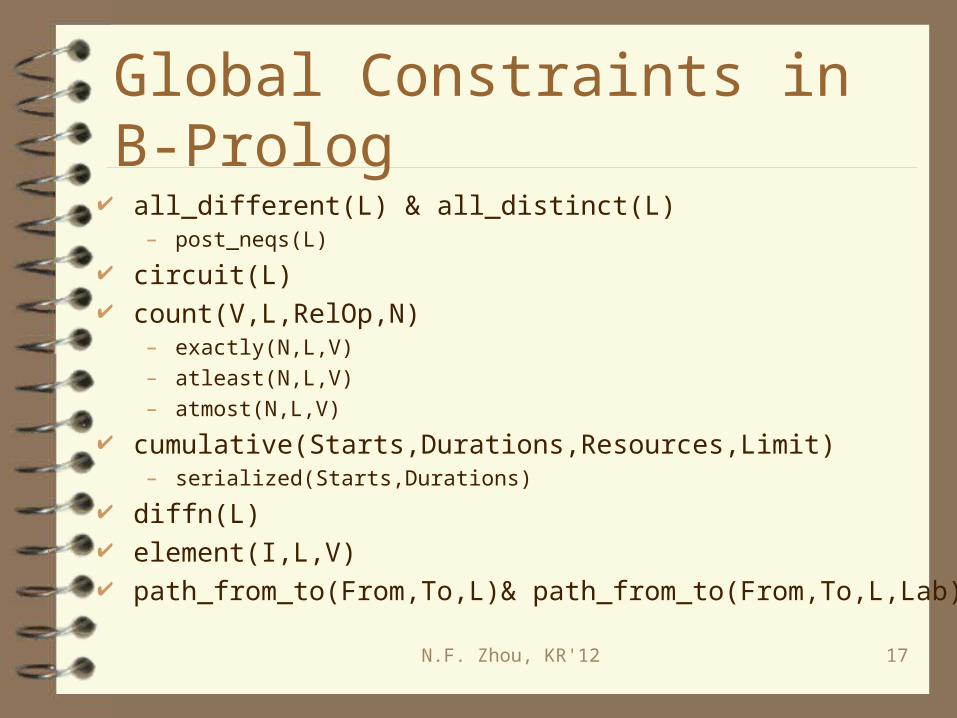
Global Constraints in B-Prolog all_different(L) & all_distinct(L)
– post_neqs(L)
circuit(L) count(V,L,RelOp,N)
– exactly(N,L,V)– atleast(N,L,V)– atmost(N,L,V)
cumulative(Starts,Durations,Resources,Limit)– serialized(Starts,Durations)
diffn(L) element(I,L,V) path_from_to(From,To,L)& path_from_to(From,To,L,Lab)
N.F. Zhou, KR'12 17
Overview of the ASP competition B-Prolog’s features BPSolver’s winning solutions BPSolver’s hopeful solutions BPSolver’s losing solutions Observations
Outline
N.F. Zhou, KR'12 18
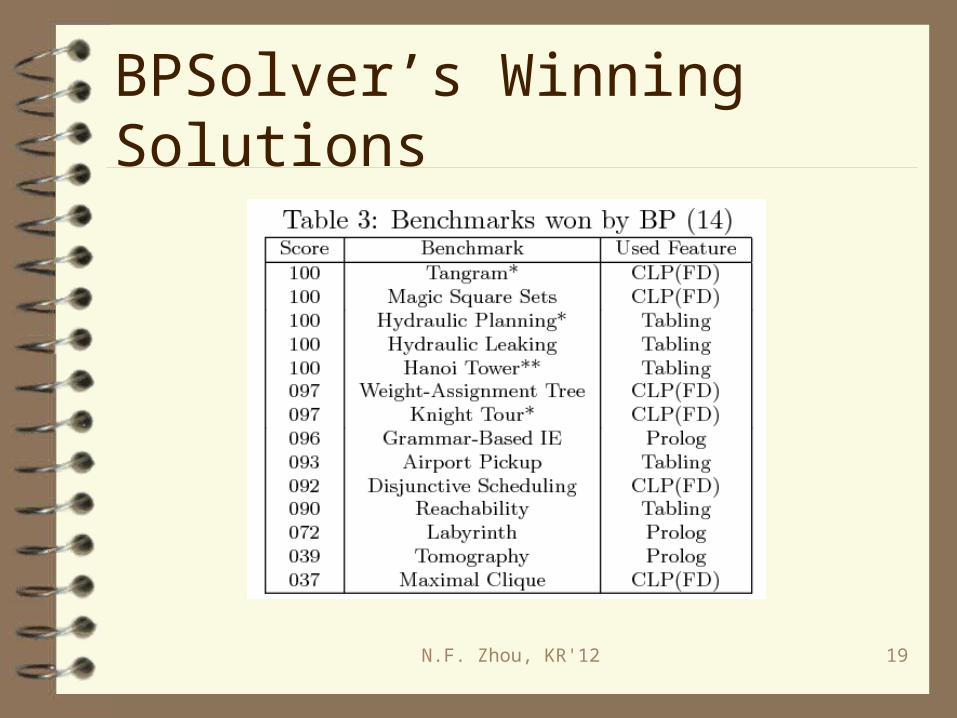
BPSolver’s Winning Solutions
N.F. Zhou, KR'12 19
Winning Solutions in Prolog
Grammar-Based Information Extraction– Parsing
Labyrinth– State space search
Tomography– Network covering
N.F. Zhou, KR'12 20
Winning Solutions With Tabling
Reachability Hydraulic Planning Hydraulic Leaking Airport Pickup Hanoi Tower
N.F. Zhou, KR'12 21
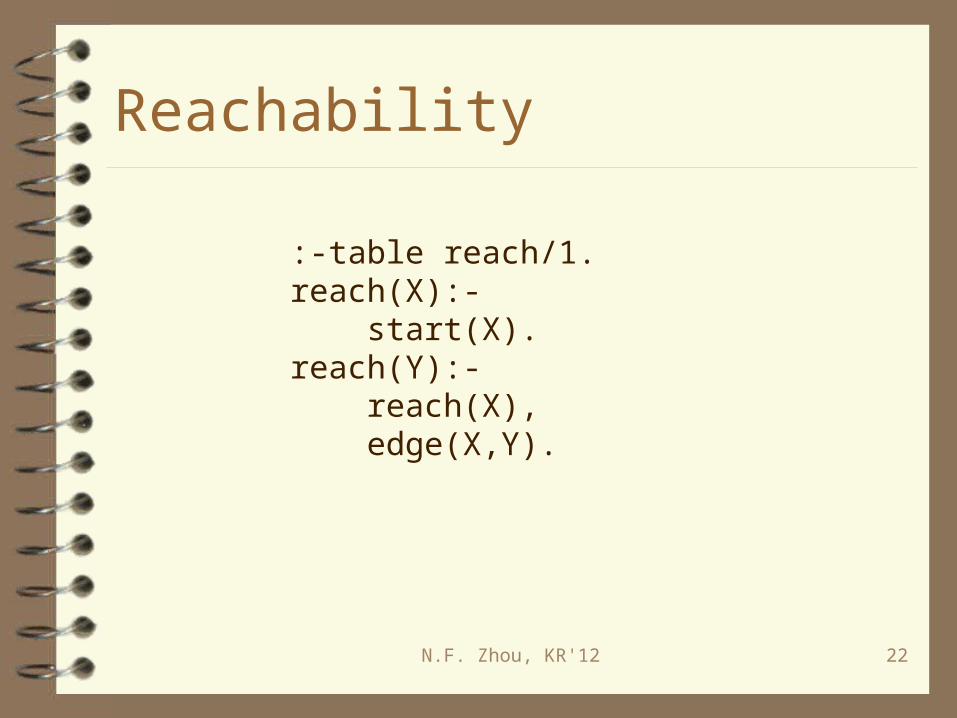
Reachability
N.F. Zhou, KR'12 22
:-table reach/1.reach(X):- start(X).reach(Y):- reach(X), edge(X,Y).
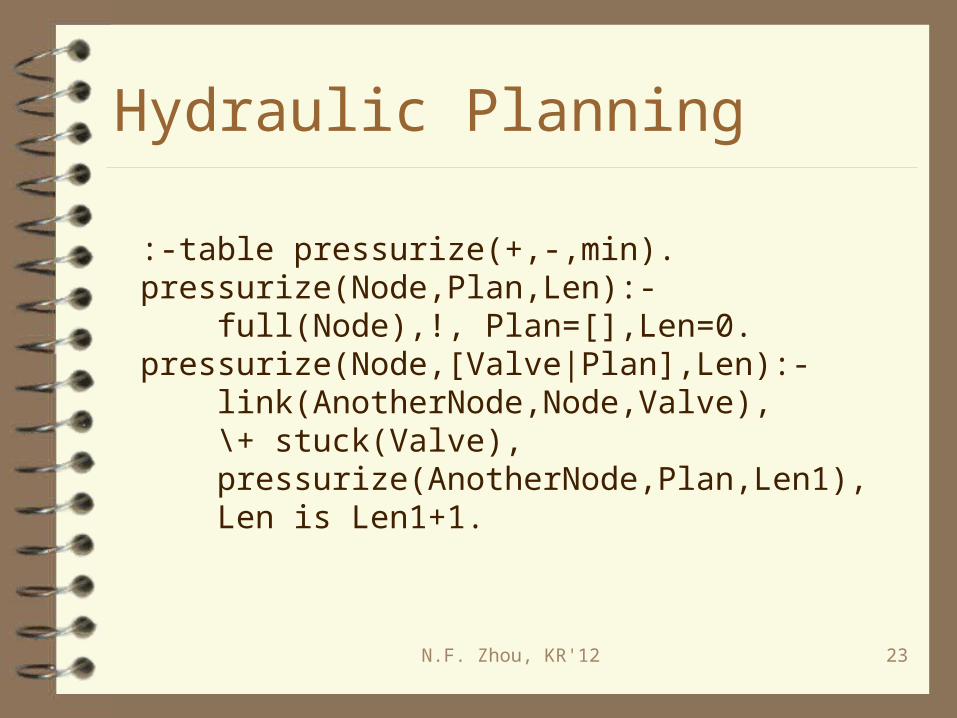
Hydraulic Planning
N.F. Zhou, KR'12 23
:-table pressurize(+,-,min).pressurize(Node,Plan,Len):- full(Node),!, Plan=[],Len=0.pressurize(Node,[Valve|Plan],Len):- link(AnotherNode,Node,Valve), \+ stuck(Valve), pressurize(AnotherNode,Plan,Len1), Len is Len1+1.
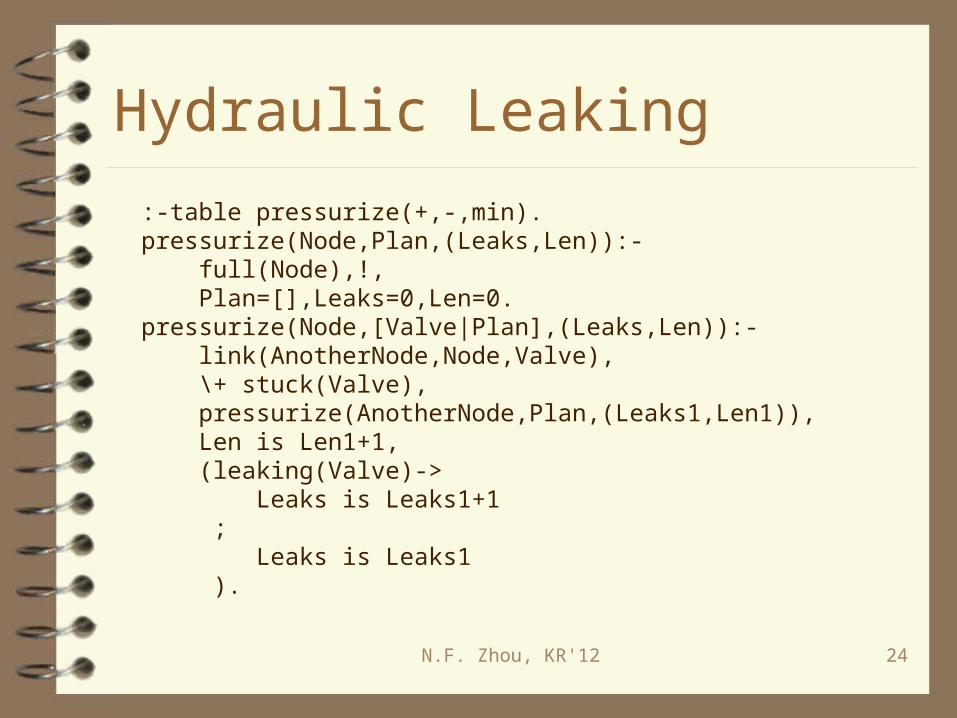
Hydraulic Leaking
N.F. Zhou, KR'12 24
:-table pressurize(+,-,min).pressurize(Node,Plan,(Leaks,Len)):- full(Node),!, Plan=[],Leaks=0,Len=0.pressurize(Node,[Valve|Plan],(Leaks,Len)):- link(AnotherNode,Node,Valve), \+ stuck(Valve), pressurize(AnotherNode,Plan,(Leaks1,Len1)), Len is Len1+1, (leaking(Valve)-> Leaks is Leaks1+1 ; Leaks is Leaks1 ).
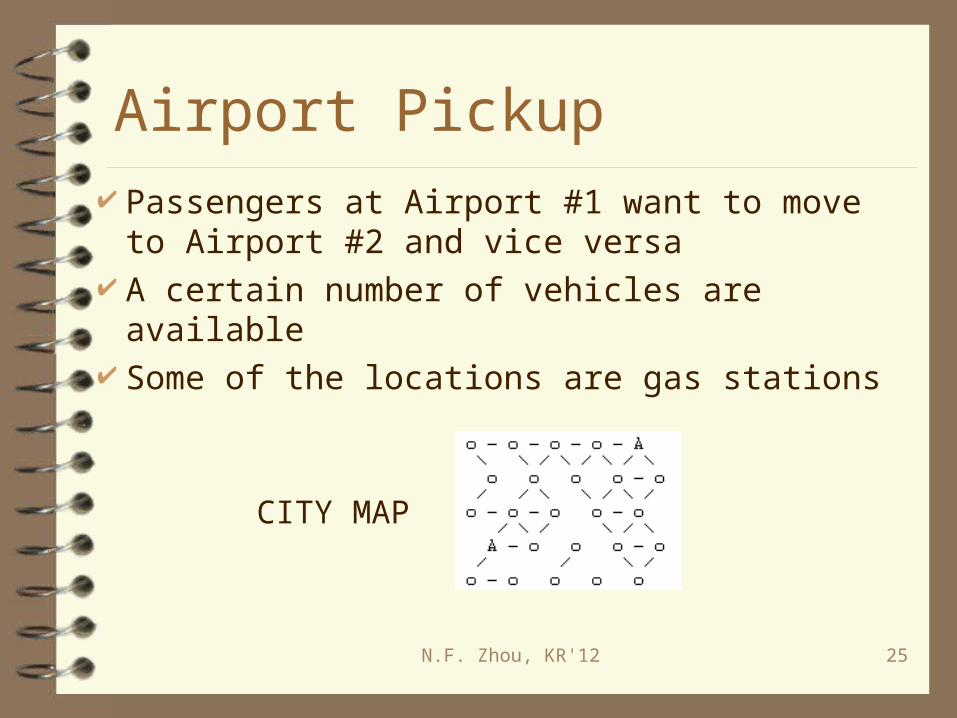
Airport Pickup
Passengers at Airport #1 want to move to Airport #2 and vice versa
A certain number of vehicles are available Some of the locations are gas stations
N.F. Zhou, KR'12 25
CITY MAP
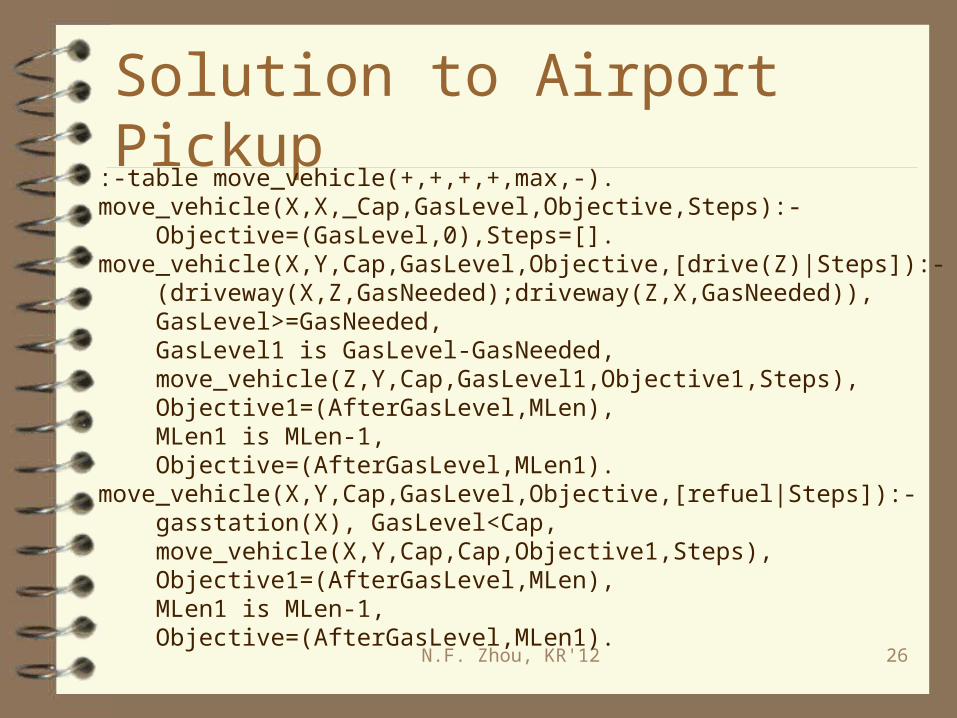
Solution to Airport Pickup
N.F. Zhou, KR'12 26
:-table move_vehicle(+,+,+,+,max,-).move_vehicle(X,X,_Cap,GasLevel,Objective,Steps):- Objective=(GasLevel,0),Steps=[].move_vehicle(X,Y,Cap,GasLevel,Objective,[drive(Z)|Steps]):- (driveway(X,Z,GasNeeded);driveway(Z,X,GasNeeded)), GasLevel>=GasNeeded, GasLevel1 is GasLevel-GasNeeded, move_vehicle(Z,Y,Cap,GasLevel1,Objective1,Steps), Objective1=(AfterGasLevel,MLen), MLen1 is MLen-1, Objective=(AfterGasLevel,MLen1).move_vehicle(X,Y,Cap,GasLevel,Objective,[refuel|Steps]):- gasstation(X), GasLevel<Cap, move_vehicle(X,Y,Cap,Cap,Objective1,Steps), Objective1=(AfterGasLevel,MLen), MLen1 is MLen-1, Objective=(AfterGasLevel,MLen1).
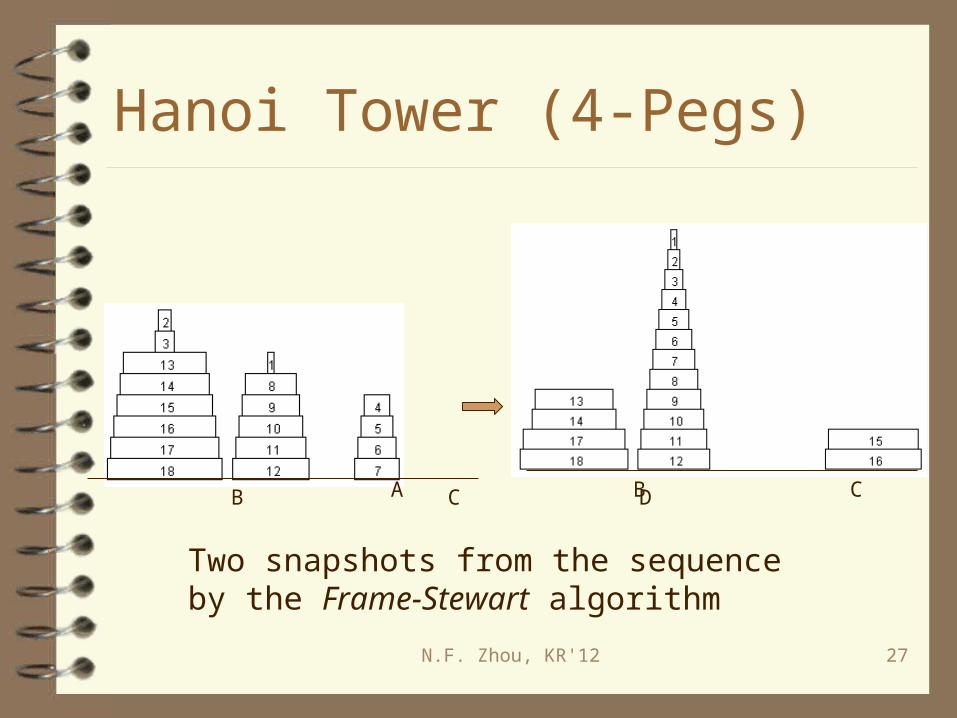
Hanoi Tower (4-Pegs)
N.F. Zhou, KR'12 27
A B C D A B C D
Two snapshots from the sequence by the Frame-Stewart algorithm
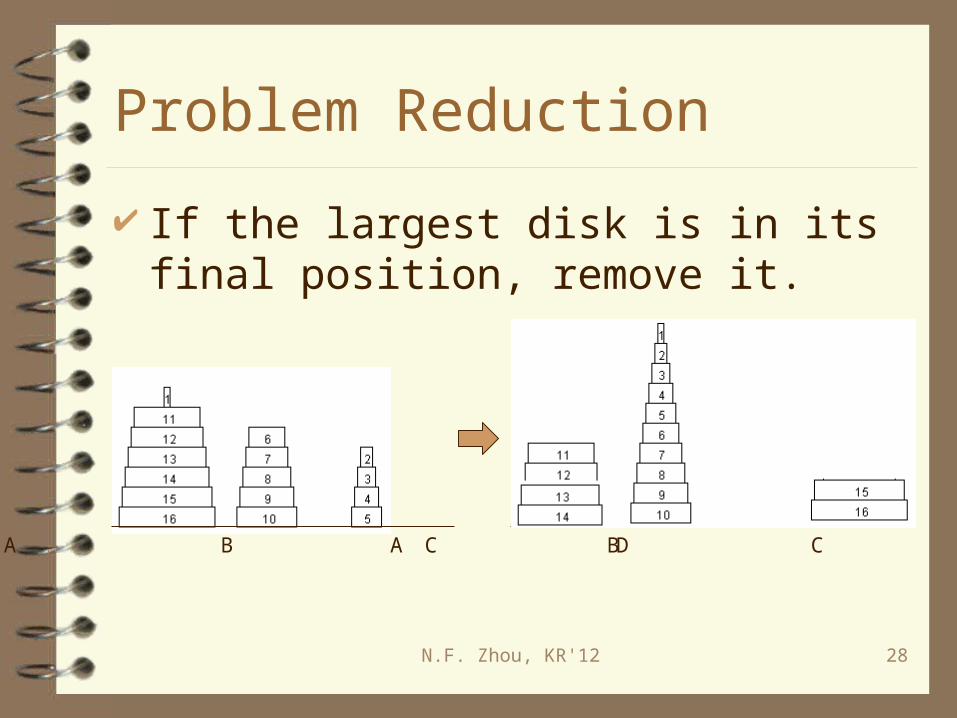
Problem Reduction
If the largest disk is in its final position, remove it.
N.F. Zhou, KR'12 28
A B C D A B C D
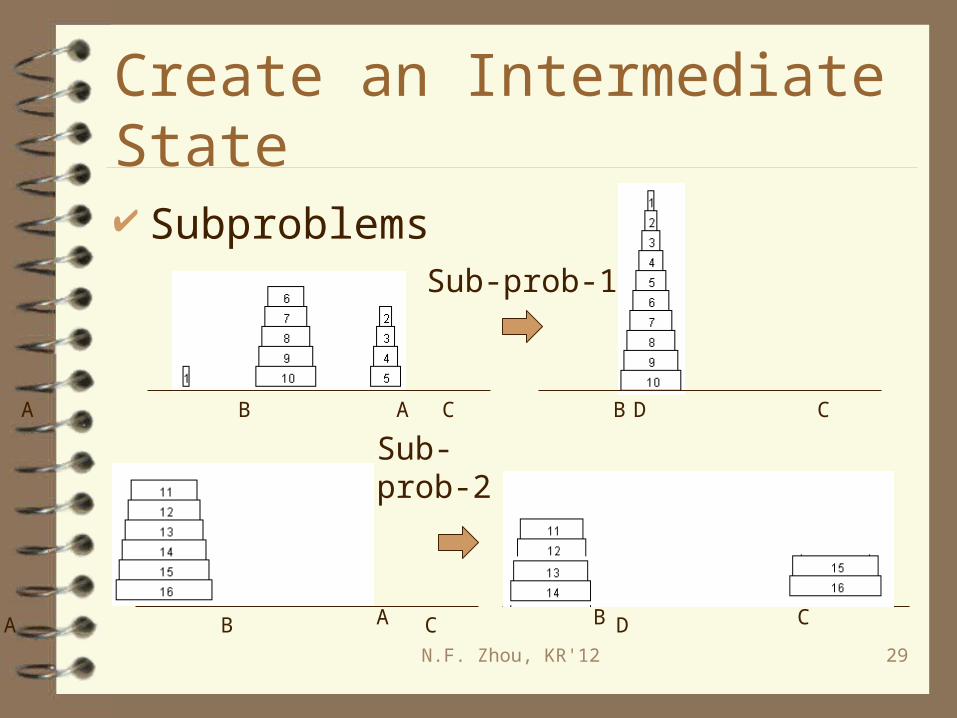
Create an Intermediate State
Subproblems
N.F. Zhou, KR'12 29
A B C D A B C D
A B C D A B C D
Sub-prob-1
Sub-prob-2
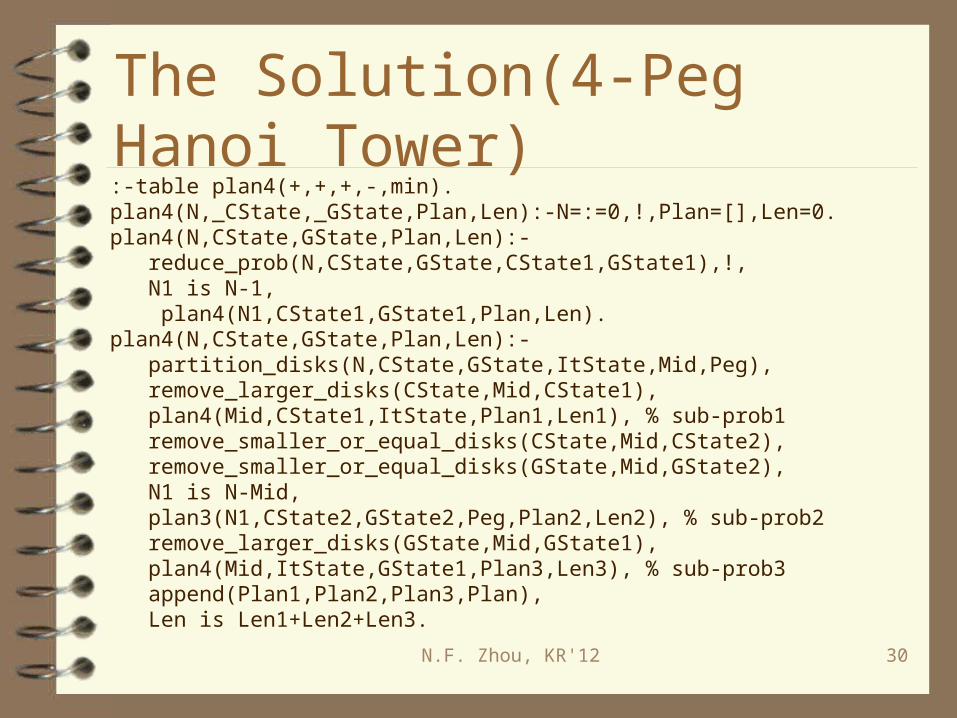
The Solution(4-Peg Hanoi Tower)
N.F. Zhou, KR'12 30
:-table plan4(+,+,+,-,min).plan4(N,_CState,_GState,Plan,Len):-N=:=0,!,Plan=[],Len=0.plan4(N,CState,GState,Plan,Len):- reduce_prob(N,CState,GState,CState1,GState1),!, N1 is N-1, plan4(N1,CState1,GState1,Plan,Len).plan4(N,CState,GState,Plan,Len):- partition_disks(N,CState,GState,ItState,Mid,Peg), remove_larger_disks(CState,Mid,CState1), plan4(Mid,CState1,ItState,Plan1,Len1), % sub-prob1 remove_smaller_or_equal_disks(CState,Mid,CState2), remove_smaller_or_equal_disks(GState,Mid,GState2), N1 is N-Mid, plan3(N1,CState2,GState2,Peg,Plan2,Len2), % sub-prob2 remove_larger_disks(GState,Mid,GState1), plan4(Mid,ItState,GState1,Plan3,Len3), % sub-prob3 append(Plan1,Plan2,Plan3,Plan), Len is Len1+Len2+Len3.
Winning Solutions in CLP(FD)
Tangram Magic Square Sets (all_different) Weight-Assignment Tree (element) Knight Tour (circuit) Disjunctive Scheduling (post_disjunctive_tasks) Maximal Clique
N.F. Zhou, KR'12 31
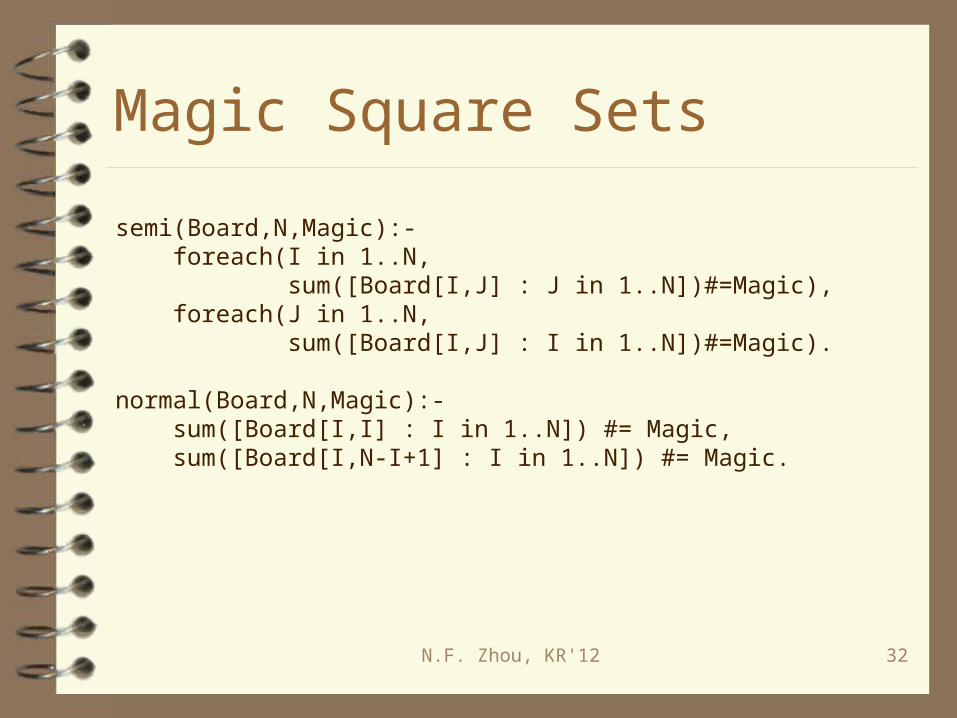
Magic Square Sets
N.F. Zhou, KR'12 32
semi(Board,N,Magic):- foreach(I in 1..N, sum([Board[I,J] : J in 1..N])#=Magic), foreach(J in 1..N, sum([Board[I,J] : I in 1..N])#=Magic).
normal(Board,N,Magic):- sum([Board[I,I] : I in 1..N]) #= Magic, sum([Board[I,N-I+1] : I in 1..N]) #= Magic.
Overview of the ASP competition B-Prolog’s features BPSolver’s winning solutions BPSolver’s hopeful solutions BPSolver’s losing solutions Observations
Outline
N.F. Zhou, KR'12 33
BPSolver’s Hopeful Solutions
Graph Coloring (Ranking = 5) Sokoban Optimization (Ranking = 4)
N.F. Zhou, KR'12 34
Graph Coloring
Model-1 (neq)• For each two neighbors i and j, CiCj
Model-2 (all_distinct)• For each complete subgraph (clique) {i1,i2,…,ik},
all_distinct([Ci1, Ci2,…, Cik])
• post_neqs(Neqs) in B-Prolog
Model-3 (Model-2 + symmetry breaking)– Allen Van Gelder: Another look at graph coloring via
propositional satisfiabilityN.F. Zhou, KR'12 35
Graph Coloring in B-Prolog
N.F. Zhou, KR'12 36
Go:- create_vars(Vars), generate_neqs(Vars,Neqs), post_neqs(Neqs,Cliques), largest_clique(Cliques,LClique), (labeling(LClique)-> labeling_ffc(Vars),!;fail), output(Vars).
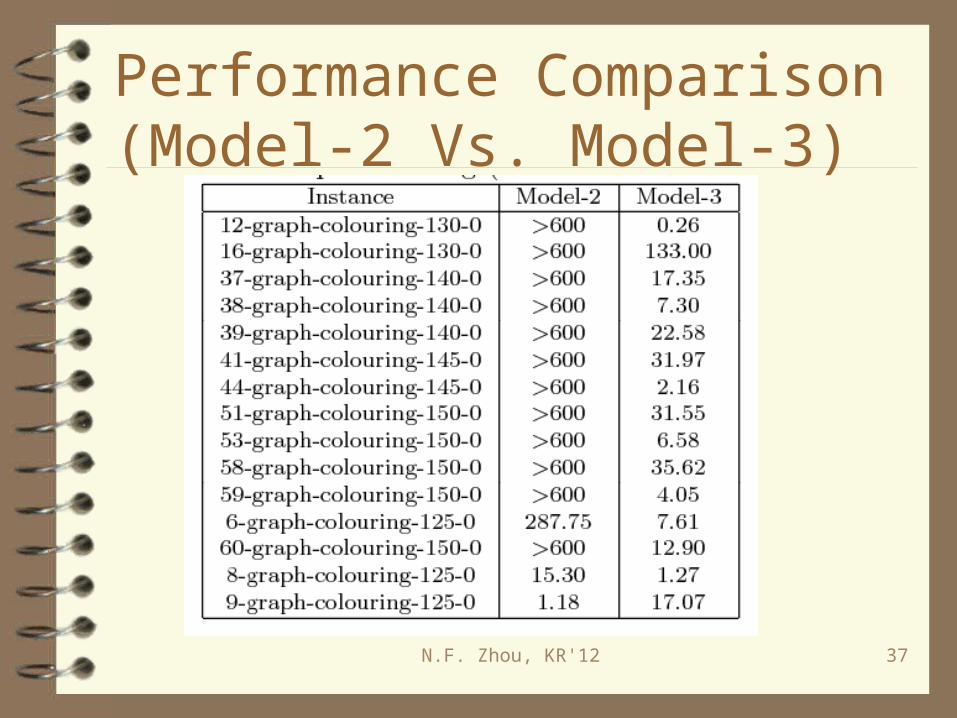
Performance Comparison(Model-2 Vs. Model-3)
N.F. Zhou, KR'12 37
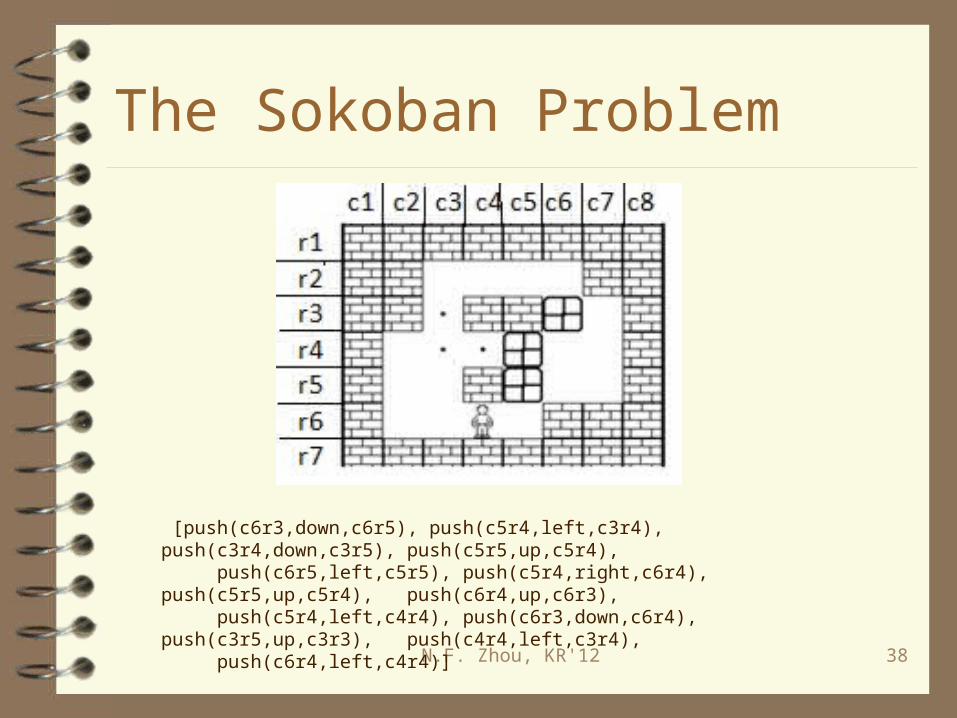
The Sokoban Problem
N.F. Zhou, KR'12 38
[push(c6r3,down,c6r5), push(c5r4,left,c3r4), push(c3r4,down,c3r5), push(c5r5,up,c5r4), push(c6r5,left,c5r5), push(c5r4,right,c6r4), push(c5r5,up,c5r4), push(c6r4,up,c6r3), push(c5r4,left,c4r4), push(c6r3,down,c6r4), push(c3r5,up,c3r3), push(c4r4,left,c3r4), push(c6r4,left,c4r4)]
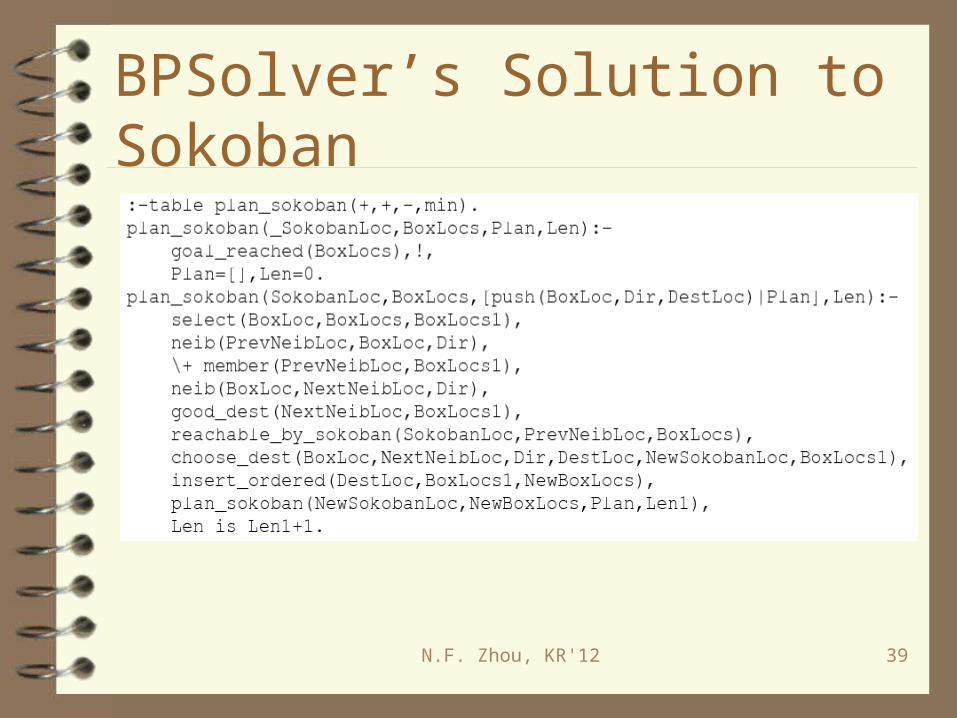
BPSolver’s Solution to Sokoban
N.F. Zhou, KR'12 39
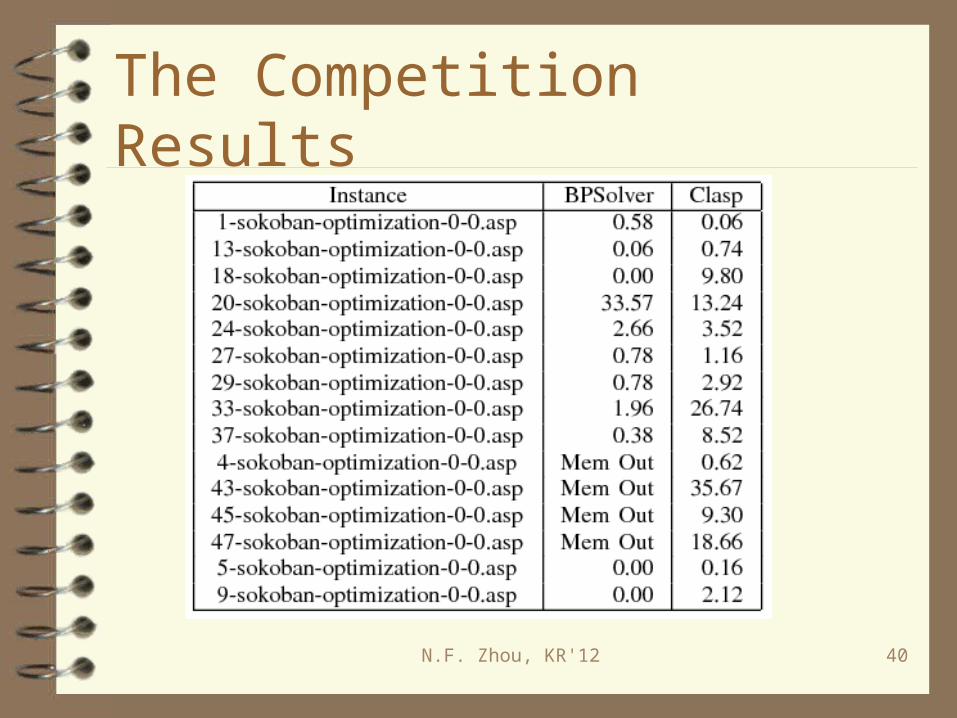
The Competition Results
N.F. Zhou, KR'12 40
BPSolver’s Losing Solutions(Score) Partner Units (0) Reverse Folding (0) Strategic Companies (0) Company Controls Optimize (0) Stable Marriage (5) Solitaire (28) Maze Generation (49)
N.F. Zhou, KR'12 41
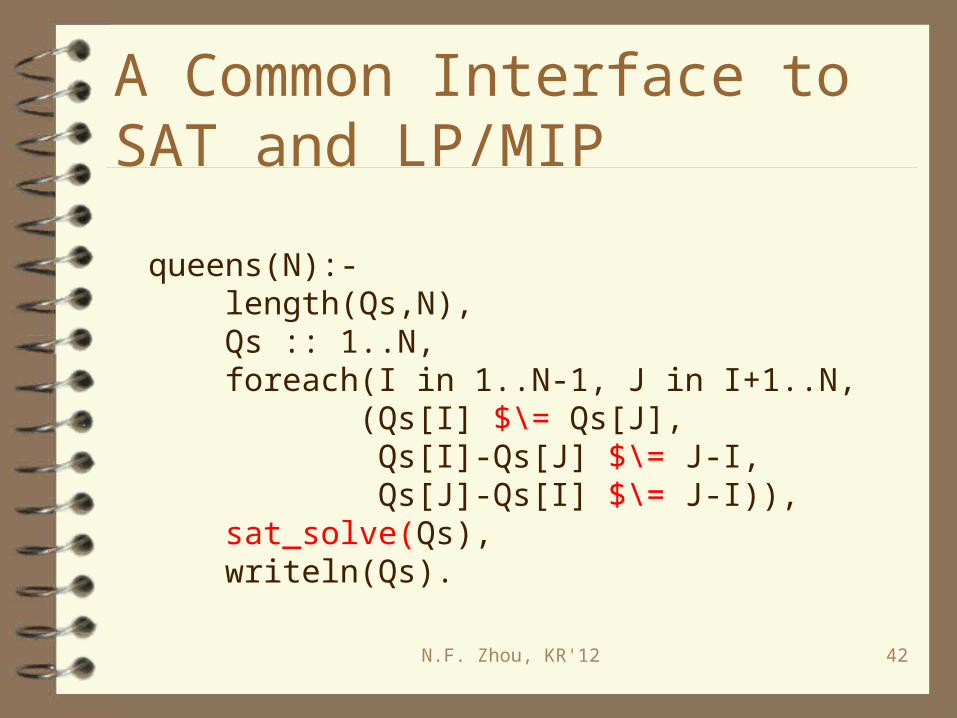
A Common Interface to SAT and LP/MIP
N.F. Zhou, KR'12 42
queens(N):- length(Qs,N), Qs :: 1..N, foreach(I in 1..N-1, J in I+1..N, (Qs[I] $\= Qs[J], Qs[I]-Qs[J] $\= J-I, Qs[J]-Qs[I] $\= J-I)), sat_solve(Qs), writeln(Qs).
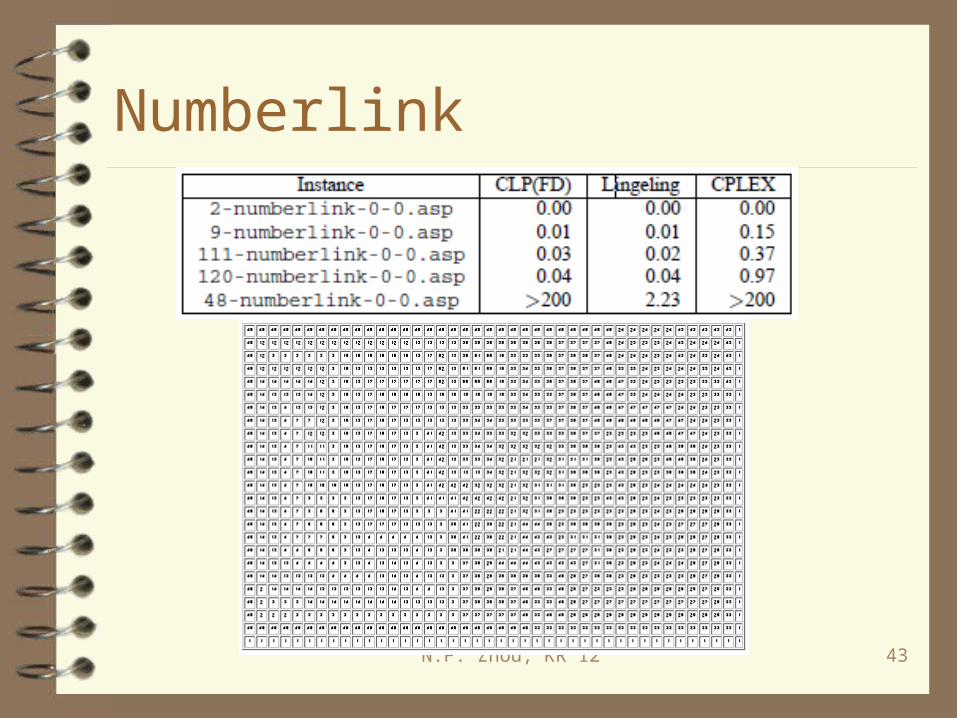
Numberlink
N.F. Zhou, KR'12 43
N.F. Zhou, KR'12 44
B-Prolog =Prolog + Tabling + CLP(FD)+SAT
Prolog enhanced with – Array subscripts
– Loop constructs
Tabling– Memorize and reuse intermediate results
• Suitable for dynamic programming problems
CLP(FD) & SAT– Constraint Logic Programming over Finite Domains
• Suitable for constraint satisfaction problems (NP-complete)
Observations
ASP vs B-Prolog– ASP encodings are generally shorter than BP
encodings
Grounding vs. top-down tabled evaluation SAT vs. CP
N.F. Zhou, KR'12 45
Resources
BPSolver’s solutions– www.sci.brooklyn.cuny.edu/~zhou/asp11/– www.probp.com/asp11/
B-Prolog– www.probp.com
Papers– www.sci.brooklyn.cuny.edu/~zhou/
N.F. Zhou, KR'12 46
Thanks
ASP competition organization committee BPSolver team members
– Agostino Dovier– Yuanlin Zhang
NSF and PSC-CUNY
N.F. Zhou, KR'12 47