Embed Size (px)
Citation preview

1
NOTES FOR THE THEORY OF WKD 263
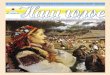
1. COORDINATE REFERENCE FRAMES
Let r be a position vector of point P that originates from the center of the Earth and let r
be the magnitude of this position vector. Note that zar += where a is the radius of the
Earth and z is the altitude of point P above the surface of the Earth. Let φ be the latitude
(ranging from 2
π− in the Southern Hemisphere to
2
π+ in the Northern Hemisphere) and λ
be the longitude (ranging from 0 at Greenwich to π2 - back at its origin) of point P. R is
defined as a vector perpendicular to the axis of the Earth towards point P at latitude φ.
Figure 1
It is our first intention to express the position and movement of point P as viewed from an
INERTIAL reference frame (movement in the atmosphere as viewed from a fixed point in
space) with unit vectors 321 e,e,e and coordinates x1, x2 and x3 since Newton’s Second
ππππ/2 r
2ππππ
0
R φφφφ
λλλλ
P

2
Law only applies in such an INIRTIAL reference frame. However, as people we are not
viewing Earth from space, but rather rotate with the Earth. It is therefore, secondly, also
convenient to express the position and movement of point P as viewed from a
ROTATING reference frame (movement in the atmosphere as viewed from a fixed point
on the Earth) with unit vectors k,j,i and coordinates x, y and z (Figure 2).
These two reference frames relatively to each other are illustrated in Figure 2:
Figure 2
The observation of longitude might change between the two reference frames as a result
of the rotation of Earth (west to east), while the latitude will not be different as viewed
from the two reference frames because it is not influenced by the rotation of the Earth.
According to Figure 1 the position vector r of point P, relative to coordinate components
in the INERTIAL reference frame, may be written as:
P
x1
x2
x3
r
R
3e
1e
2e
i
j k
λ
φ
y
x
z

3
32a1a esinresincosrecoscosrr φ+λφ+λφ= (1.1)
where aλ refers to the longitude of point P as viewed from the INERTIAL reference
frame. Let λ denote the longitude of a point P in the ROTATING reference frame and let
Ω be the angular speed (speed of rotation = constant ≈ 7.27 x 10-5 rad s-1 = one rotation of
2π every 24 hours) of Earth. The longitude λa changes with time as the Earth rotates
while λ might change as a result of the flow of point P in the ROTATING reference
frame. It therefore follows that )t(t)t(a λ+Ω=λ where Ω is expressed in “radians per
second” meaning that tΩ is the latitudinal angle change as a result of Earth’s rotation.
Equation (1.1) may therefore also be written as
321 esinre)tsin(cosre)tcos(cosrr φ+λ+Ωφ+λ+Ωφ= (1.2)
2. DEFINING THE ANGULAR VELOCITY VECTOR AND VECTOR R
In the INERTIAL reference frame the angular velocity vector of the Earth may be
expressed as follows:
321 ee0e0 Ω++=Ω (2.1)
Note that the vector Ω at any point P is always parallel to the unit vector 3e as defined in
the INERTIAL reference frame. The vector Ω might also be written in terms of the unit
vectors k,j,i of the ROTATING reference frame (see Figure 3). It therefor follows that
k)sin(j)cos( φΩ+φΩ=Ω (2.2)

4
Figure 3
In a similar way the vector R , which is a vector with its origin at the axis of the Earth at
latitude φ and points directly to position P (at a 90º angle with Earth’s axis), can also be written
in terms of the unit vectors k,j,i in the ROTATING reference frame.
Figure 4
From figure 4 it follows that
k)coscosr(j)sincosr(R φφ+φφ−= (2.3)
Ω
j k
3e φ
φ
φ
r
P
j−
k
3e φ
φ
φ R
r
P

5
3. SMALL INCREMENT DISPLACEMENTS
Let δx represent a small longitudinal increment displacement in the i direction (from west to
east) associated with δλ ; δy a small increment latitudinal displacement in the j direction (from
south to north) associated with δφ and δz a small increment displacement associated with δr
(from the surface upwards) in the ROTATING reference frame. Let these increment
displacements take place over an infinitesimal time interval of δt. According to the rule of the
circumference of a circle (circumference = 2πr = angle of path completed multiplied by the radius
of rotation) and R = r cos φ it follows from Figures 1 and 2 that:
φδλ=δ cosrx (3.1)
δφ=δ ry (3.2)
rz δ=δ (3.3)
The speed components u, v, w in the k,j,i directions of the ROTATING reference frame may
therefore be written as:
udt
dcosr
tlimcosr
tcosr
t
x
0t=
λφ=
δ
δλφ=
δ
δλφ=
δ
δ
→δ (3.4)
vdt
dr
tlimr
tr
t
y
0t=
φ=
δ
δφ=
δ
δφ=
δ
δ→δ
(3.5)
wdt
dr
t
rlim
t
r
t
z
0t==
δ
δ=
δ
δ=
δ
δ→δ
(3.6)
Here u, v, w are the speed components in the k,j,i directions as viewed from within the
ROTATING reference frame. By defining U as the wind velocity in the ROTATING
reference frame it follows that
kwjviukdt
drj
dt
dri
dt
dcosrU ++=+
φ+
λφ= (3.7)

6
4. FIRST DERIVATIVE TO OBTAIN VELOCITY
Equation (1.2) gives the components of the position vector r in the INERTIAL reference
frame, which is a function of time as the Earth rotates, and it therefor follows directly that:
321 e)t(sin)t(re))t(tsin()t(cos)t(re))t(tcos()t(cos)t(r)t(r φ+λ+Ωφ+λ+Ωφ=
Let us now define any time derivative operator taken in the INERTIAL reference frame
space as Dt
Da
To obtain the velocity vector we now differentiate the position vector r with respect to
time in the INERTIAL reference frame but with the objective to express r as a position vector in
the ROTATING reference frame
Dt
rDa [ ] 1e)dt
d()tsin(cosr)tcos(
dt
d)sin(r)tcos(cos
dt
dr
λ
+Ωλ+Ω−φ+λ+Ωφ
φ−+λ+Ωφ=
[ ] 2e)dt
d()tcos(cosr)tsin(
dt
d)sin(r)tsin(cos
dt
dr
λ
+Ωλ+Ωφ+λ+Ωφ
φ−+λ+Ωφ+
3edt
dcosrsin
dt
dr
φ
φ+φ+
[ ] 21 e)tcos(e)tsin()(cosrdt
dcosr λ+Ω+λ+Ω−
Ωφ+
λφ=
321 ecose)tsin(sine)tcos(sindt
dr φ+λ+Ωφ−λ+Ωφ−
φ+
321 esine)tsin(cose)tcos(cosdt
drφ+λ+Ωφ+λ+Ωφ+ (4.1)
Replace equations (3.4), (3.5) and (3.6), namely u,v,w which are the wind components in
the ROTATING reference frame, as well as the following unit vectors which are unit

7
vectors in the ROTATING reference frame (Figure 2) relative to the INERTIAL
reference frame.
21 e)tcos(e)tsin(i λ+Ω+λ+Ω−= (4.2)
321 ecose)tsin(sine)tcos(sinj φ+λ+Ωφ−λ+Ωφ−= (4.3)
321 esine)tsin(cose)tcos(cosk φ+λ+Ωφ+λ+Ωφ= (4.4)
Additional notes:
It can be shown that the magnitude of the vectors in equations (4.2), (4.3) and (4.4) is
equal to one meaning that they are unit vectors:
Magnitude of i
11)t(cos)t(sini 22 ==λ+Ω+λ+Ω−=
It can also be shown that these vectors are independent:
For example the independence of vectors i and j
0
sin)tcos()tsin(sin)tcos()tsin(
0))tsin(sin)(tcos())tcos(sin))(tsin((
)ecose)tsin(sine)tcos(sin()e0e)tcos(e)tsin((ji 321321
=
φλ+Ωλ+Ω−φλ+Ωλ+Ω=
+λ+Ωφ−λ+Ω+λ+Ωφ−λ+Ω−=
φ+λ+Ωφ−λ+Ωφ−⋅+λ+Ω+λ+Ω−=⋅
Equation (4.1) then becomes
Dt
rDa [ ] kwjvuiicosr +++φΩ= (4.5)
Equations (3.4), (3.5) and (3.6) indicated that u, v, w are the wind components in the
k,j,i directions as viewed from within the ROTATING reference frame. Since Dt
rDa is

8
the derivative in the INERTIAL reference frame space, the term icosr φΩ in equation
(4.5) must be the angular velocity contribution in the i (west to east) direction as viewed
from the INERSIAL reference frame. This term may be written in a slightly different
way:
r×Ω
φλ+Ωφλ+Ωφ
Ω=
sinr)tsin(cosr)tcos(cosr
00
eee 321
from equations (2.1), (1.2)
[ ] [ ] [ ] 321 e0e)tcos(cosre)tsin(cosr +λ+ΩφΩ+λ+ΩφΩ−=
[ ] [ ] 21 e)tcos(e)tsin(cosr λ+Ω+λ+Ω−φΩ= replace equation (4.2)
icosr φΩ= (4.6)
Replacing the latter into equation (4.5) yields
rkwjvuiDt
rDa ×Ω+++=
and finally (from equation (3.7))
rUUDt
rDa
a ×Ω+== (4.7)
In equation (4.7) we have indicated that the change in the position vector r (velocity
vector aU ), as obtained through differentiating the position in the INIRTIAL reference
frame space, can be written as the velocity in the ROTATING reference frame ( U ) plus
a velocity component in the i direction due to the rotation of the Earth ( r×Ω ).

9
5. SECOND DERIVATIVE TO OBTAIN ACCELERATION
Since we require acceleration for applying the second law of Newton (F = ma per unit
mass) we need to differentiate the velocity vector with respect to time. As before with the
position vector, we will differentiate U which is the velocity vector in the ROTATING
reference frame. From equation (3.7) it follows that
kwjviuU ++=
and therefore
dt
kdwk
dt
dw
dt
jdvj
dt
dv
dt
idui
dt
du
Dt
UDa +++++= (5.1)
Dt
UDa, as defined in equation (5.1), represent differentiation in the INIRTIAL reference
frame space as applied on the velocity vector in the ROTATING reference frame. Take
note that dt
kd,
dt
jd,
dt
id would have been zero in the ROTATING reference frame. Taking
the time derivative of equations (4.2), (4.3) and (4.4), as required in equation 5.1, yields:
kcosr
ujsintan
r
u
dt
id
φΩ+−
φΩ+φ= (5.2)
kr
visintan
r
u
dt
jd
−
φΩ+φ−= (5.3)
jr
vicos
r
u
dt
kd
+
φΩ+= (5.4)
EXERCISE: Derive equations (5.2), (5.3) and (5.4) from equations (4.2), (4.3) and (4.4)
These equations might be written in a slightly different way.

10
Using equation (2.2) yields
kcosjsin
001
sincos0
kji
i φΩ−φΩ=φΩφΩ=×Ω (5.5)
isin
010
sincos0
kji
j φΩ−=φΩφΩ=×Ω (5.6)
icos
100
sincos0
kji
k φΩ=φΩφΩ=×Ω (5.7)
Replace equations (5.5), (5.6) and (5.7) into equations (5.2), (5.3) and (5.4) to obtain
kr
ujtan
r
ui
dt
id
−
φ+×Ω= (5.8)
kr
vitan
r
uj
dt
jd
−
φ−×Ω= (5.9)
jr
vi
r
uk
dt
kd
+
+×Ω= (5.10)
If equations (5.8), (5.9) and (5.10) are replaced in equation (5.1), equation (5.1) becomes
Dt
UD a
kdt
dwj
dt
dvi
dt
du++=
+
+×Ω+
−
φ−×Ω+
−
φ+×Ω+ j
r
vi
r
ukwk
r
vitan
r
ujvk
r
ujtan
r
uiu

11
kdt
dwj
dt
dvi
dt
du++=
+
+
−
φ−+
−
φ+×Ω+×Ω+×Ω+ j
r
vi
r
uwk
r
vitan
r
uvk
r
ujtan
r
uu)k(w)j(v)i(u
but U)kwjviu()kw()jv()iu()k(w)j(v)i(u ×Ω=++×Ω=×Ω+×Ω+×Ω=×Ω+×Ω+×Ω
and therefore
Dt
UDaUk
r
)vu(
dt
dwj
r
wv
r
tanu
dt
dvi
r
wu
r
tanvu
dt
du 222
×Ω+
+
−+
+φ
++
+φ
−=
(5.11)
Equation (5.11) can also be written as the sum of an acceleration term in the ROTATING
reference frame plus the acceleration contribution as a result of Earth’s rotation:
Udt
Ud
Dt
UDa ×Ω+= (5.12)
where
kr
)vu(
dt
dwj
r
wv
r
tanu
dt
dvi
r
wu
r
tanvu
dt
du
dt
Ud 222
+
−+
+φ
++
+φ
−=

12
6. ACCELERATION IN THE INIRTIAL REFERENCE FRAME SPACE
From equations 4.7 and 5.12 it follows that
)rU(Dt
D
Dt
UD aaa ×Ω+=
)r(U2dt
Ud
rUUdt
Ud
UDt
UD
Dt
rD
Dt
UD
aa
aa
×Ω×Ω+×Ω+=
×Ω+×Ω+
×Ω+=
×Ω+=
×Ω+=
(6.1)
The left hand side of equation (6.1) represents the acceleration as viewed from the
INERTIAL reference frame (where the second law of Newton applies), while the right
hand side are written in terms of vectors in the ROTATING reference frame from where
we observe the weather and climate.
7. THE SECOND LAW OF NEWTON AND THE VECTOR FORM OF THE
MOMENTUM EQUATION OF THE ATMOSPHERE
The second law of Newton (F=ma) is only valid in the INERTIAL reference frame, and
therefore (for unit mass; m=1):
Dt
UDF
aa=∑ (7.1)

13
According to equation (6.1) one may also write acceleration in the INIRTIAL reference
frame in terms of components in the ROTATING reference frame. This is more
convenient since we are experiencing atmospheric flow in the ROTATING reference
frame. From equations 6.1 and 7.1 one obtains the MOMENTUM EQUATION for a unit
mass as expressed in terms of vectors in the ROTATING reference frame:
∑ ×Ω×Ω−×Ω−= )r(U2Fdt
Ud (7.2)
8. COORDINATE COMPONENTS OF THE FORCES
In the ROTATING reference frame each force in equation (7.2) may be written in terms
of k,j,i components.
(a) Acceleration in the rotating coordinate system (left hand side of equation 7.2)
kdt
dwj
dt
dvi
dt
du
dt
Ud++= (8.1)
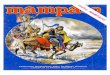
(b) Pressure gradient force (part of ∑F )
We first derive the pressure gradient force in the i (or x) direction. Consider a
cube with an area B over the left vertical panel and an area A over the right
vertical panel. Let the volume of the cube be zyx δδδ . The pressure that pushes
against panel B is p0 and the pressure that pushes against panel B is p0+δp.
Coriolis force
Centripetal acceleration
Pressure gradient force
Gravitational force
Friction and viscosity forces

14
Pressure = Force/ Area and therefore Force=Pressure x Area
Pressure on panel A: xx
pp)pp( oo δ
∂
∂+=δ+ (pressure gradient over distance δx)
Force on panel A: zyxx
ppF oA δδ
δ
∂
∂+−=
Pressure on panel B: op+
Force on panel B: ( ) zypF oB δδ+=
Total force (Fx) in the i direction is therefore
zyxx
pzypzyx
x
pzypFFF ooBAx δδδ
∂
∂=δδ+δδδ
∂
∂−δδ−=+=
But the volume of the cube is ρ
=ρ
===δδδ1m
density
massVzyx
and therefore
x
p1Fx
∂
∂
ρ−=
In a similar way follows that: y
p1Fy
∂
∂
ρ−= and
z
p1Fz
∂
∂
ρ−=
The pressure gradient force in vector and component format is therefore:
kz
p1j
y
p1i
x
p1p
1
∂
∂
ρ−
∂
∂
ρ−
∂
∂
ρ−=∇
ρ− (8.2)
A B
δx
δy
δz p0 p0+δp

15
(c) Gravitational force (part of ∑F )
The gravitational force may be written as ∗g (8.3)
which is a vector that points towards the centre of the Earth. This vector is not
necessarily parallel to the unit vector k since it is not always perpendicular to the
surface of the Earth. The reason for this is that the Earth is not a perfect circle, but
rather a sphere:
(d) Frictional forces (part of ∑F )
kFjFiFF rzryrxr ++= __________(8.4)
(e) Coriolis force
From equations (2.2) and (3.7) it follows that
k)cos2u(j)sin2u(i)sin2vcos2w(
wvu
sincos0
kji
2U2
φΩ+φΩ−φΩ+φΩ−=
φΩφΩ−=×Ω− (8.5)
∗g

16
(f) Centripetal force (and gravity force)
From equations (2.2) , (4.6) and (2.3) it follows that
R
k)coscosr(j)sincosr(
k)coscosr(j)sincosr(i)0(
00cosr
sincos0
kji
)r(
2
2
22
Ω−=
φφ+φφ−Ω−=
φφΩ−φφΩ+=
φΩ
φΩφΩ=×Ω×Ω−
If we combines the vector with the same magnitude but opposite direction of the
centripetal force (called the centrifugal force) with the gravitational force
(equation 8.3), we get the gravity force ( Rgg 2* Ω+= ). Unlike the gravitational
force vector, the gravity force vector will always be perpendicular to the spherical
surface of the Earth and will therefore always be parallel to the unit vector k ,
although in the opposite direction.
The gravity force which is the sum, or combination, of the gravitational and
centrifugal forces may therefore be written as:
kgg −= (8.6)
where Rg)r(gg 2** Ω+=×Ω×Ω+=
∗g
g
R2Ω

17
9. COORDINATE COMPONENTS OF THE FORCES
From equation 7.2 the MOMENTUM EQUATION for a unit mass is:
∑ ×Ω×Ω−×Ω−= )r(U2Fdt
Ud
which in coordinate components (when replacing equations 8.1, 8.2, 8.4, 8.5 and 8.6)
may be written as:
i - direction : rxFx
p1
a
tanuv
a
uwcosw2sinv2
dt
du+
∂
∂
ρ−=
φ−+φΩ+φΩ− (9.7)
j - direction : ry
2
Fy
p1
a
tanu
a
vwsinu2
dt
dv+
∂
∂
ρ−=
φ−+φΩ+ (9.8)
k - direction : rz
22
Fgz
p1
a
)vu(cosu2
dt
dw+−
∂
∂
ρ−=
+−φΩ− (9.9)
or in vector format:
rFU2gp1
dt
Ud+×Ω−+∇
ρ−= (9.10)

18
Simplification of the momentum equation (scaling for synoptic systems)
On the synoptic scale we consider systems that have a horizontal scale of in the order of
1000km and a vertical scale of in the order of 10km (approximated depth of the
troposphere). If we also consider mid-latitude systems the scales might be summarised as
follows:
L: Horizontal length scale = 10 6 m (1000km)
H: Vertical depth scale = 10 4 m (10km)
U: Horizontal velocity scale = 10 m.s -1
(36 km.h -1
)
W: Vertical velocity scale = 10 -2
m.s -1
(1 cm.s -1
)
δP/ρ: Horizontal pressure fluctuation scale = 10 3 m
2.s
-2
T: Time scale (L/U) = 10 6/ 10 = 10
5s
ν: Kinematic viscosity coefissient (for friction) = 1.46 x 10 -5
m 2.s
-1
2Ω: 2 x Speed of rotation of the Earth = 1.4 x 10 -4
rad.s -1
g: Gravity = 10 m.s -2
a: Radius of the Earth = 6.37 x 10 6 m
In the synoptic scale small terms (grey) might be ignored:
rxFx
p1
a
tanuv
a
uwcosw2sinv2
dt
du+
∂
∂
ρ−=
φ−+φΩ+φΩ−
U2/L 2ΩU 2ΩW UW/a U
2/a δP/Lρ νU/H
2
(10 -4
) (10 -3
) (10 -6
) (10 -8
) (10 -5
) (10 -3
) (10 -12
)
ry
2
Fy
p1
a
tanu
a
vwsinu2
dt
dv+
∂
∂
ρ−=
φ−+φΩ+
U2/L 2ΩU UW/a U
2/a δP/Lρ νU/H
2
(10 -4
) (10 -3
) (10 -8
) (10 -5
) (10 -3
) (10 -12
)
rz
22
Fgz
p1
a
)vu(cosu2
dt
dw+−
∂
∂
ρ−=
+−φΩ−
UW/L 2ΩU U2/a δP/Hρ g νW/H
2
(10 -7
) (10 -3
) (10 -5
) (10) (10) (10 -15
)

19
10 THE CONTINUITY EQUATION
In the previous section we derived the momentum equation that addressed the
CONSERVATION OF MOMENTUM in the atmosphere. The second fundamental
conservation principle is the CONSERVATION OF MASS in the atmosphere. The
mathematical relationship that expresses CONSERVATION OF MASS is called the
continuity equation.
Consider a fixed (stationary) unit volume element zyx δδδ with density ρ and mass mδ .
In order to conserve mass within the volume, the following must apply:
RATE OF MASS INFLOW ACROSS THE BOUNDARIES OF THE VOLUME
= RATE OF MASS INCREASE IN THE VOLUME
1) RATE OF MASS INFLOW ACROSS THE BOUNDARIES OF THE VOLUME
We know that the RATE OF MASS INFLOW = MOMENTUM TRANSFER which, for
a unit volume, may be expressed as:
kwjviu)1(UUzyxUm ρ+ρ+ρ=ρ=δδρδ=δ where kwjviuU ++= .
MOMENTUM TRANSFER in the i direction across area B may therefore be written as:
δx
δy
δz zyx)u(
xu δδ
δρ
∂
∂+ρ A B ( ) zyu δδρ

20
( ) zyu δδρ (10.1)
Momentum transfer in the i direction over panel A, which is distance xδ from panel B,
therefore becomes
zyx)u(x
u δδ
δρ
∂
∂+ρ (10.2)
The net flow into the unit volume owing to the i velocity component then becomes
( ) ( ) zyxux
zyx)u(x
uzyu δδδρ∂
∂−=δδ
δρ
∂
∂+ρ−δδρ (10.3)
A similar expression can be derived for momentum transfer across areas in the j and k
directions, meaning that the net mass flux over all areas becomes
( ) ( ) ( ) zyxwz
vy
ux
δδδ
ρ
∂
∂+ρ
∂
∂+ρ
∂
∂−
and for unit volume
( ) ( ) ( )
( )U
1.wz
vy
ux
ρ⋅∇−=
ρ
∂
∂+ρ
∂
∂+ρ
∂
∂−
(10.4)
2) RATE OF MASS INCREASE IN THE VOLUME
The RATE OF MASS INCREASE IN THE VOLUME may be expressed as:

21
t)zyx(
tt
m
∂
ρ∂=δδρδ
∂
∂=
∂
∂ for the unit volume (10.5)
Setting equation (10.4) equal to equation (10.5) yields - as originally defined
( )t
U∂
ρ∂=ρ⋅∇−
( ) 0Ut
=ρ⋅∇+∂
ρ∂ (10.6)
Equation (10.7) is known as the mass divergence form of the continuity equation for a
stationary Eulerian unit volume. One can also write the continuity equation in terms of
velocity divergence looking at Lagrangian volume that moves in the atmosphere:
( ) ( ) 0UUUdt
dU
t=⋅∇ρ+ρ∇⋅+
ρ∇⋅−
ρ=ρ⋅∇+
∂
ρ∂
and therefore
0Udt
d1=⋅∇+
ρ
ρ (10.7)
Remember, as earlier defined in Vector
Algebra, that t∂
∂ refers to temporal
change in a stationary Eulerian volume
while dt
d refers to changes in a moving
Lagrangian volume

22
11 THE THERMODYNAMIC ENERGY EQUATION
The final conservation equation is known as the the thermodynamic energy equation that
describes the CONSERVATION OF ENERGY in the atmosphere.
The total thermodynamic energy of a moving (Lagrangian) control volume of air (also a
mass element Vm ρδ=δ ) in the atmosphere where mass is conserved may be expressed
as the sum of its internal heating energy and the kinetic energy as a result of macroscopic
(large-scale) flow.
Therefore:
RATE OF CHANGE IN THE TOTAL THERMODYNAMIC ENERGY = RATE OF
INTERNAL HEATING IN THE VOLUME OF AIR + THE RATE AT WHICH WORK
IS DONE ON THE VOLUME OF AIR BY EXTERNAL FORCES.
The external forces may be defided into (1) SURFACE FORCES (pressure and viscosity
on the surface boundary of the volume) and BODY FORCES (gravity and Corioilis
force).
Let
δme = internal energy of a mass element δm with volume Vδ and density ρ
δm½ UU ⋅ = kinetic energy on a mass element δm as a result of external forces
Energy =
Internal energy
External surface forces
External body forces

23
The RATE OF CHANGE IN THE TOTAL THERMODYNAMIC ENERGY of a mass
element can therefore be written as:
ρδ⋅+=
⋅+δ V)UU2
1e(
dt
d)UU
2
1e(m
dt
d (11.1)
1) The rate of internal heating on a mass element due to radiation, conduction and
latent heat release, may be written as:
mJδ = )V(J ρδ (11.2)
where J is the rate of heating per unit mass
2) The rate of work done on a mass element by an external surface PRESSURE
FORCE, may be written as
UF ⋅ = u)zyp( δδ = zy)pu( δδ
The rate of work done by the external surface PRESSURE FORCE in the i
direction on area B may therefore be written as:
( ) zypu B δδ
δx
δy
δz A B zyx)pu(
x)pu( BB δδ
δ
∂
∂+− zy)pu( B δδ

24
The rate of work done by the external surface PRESSURE FORCE in the i
direction on area A, which is distance xδ from panel B, therefore becomes
zyx)pu(x
)pu( B δδ
δ
∂
∂+−
The net rate of work done by the external surface PRESSURE FORCE in the i
direction then becomes
( ) ( ) ( ) Vpux
zyxpux
zyx)pu(x
)pu(zypu BB δ∂
∂−=δδδ
∂
∂−=δδ
δ
∂
∂+−δδ
A similar expression can be derived for the rate of work done by external surface
PRESSURE FORCES in the j and k directions, meaning that the net rate of work
done on all areas becomes
( ) ( ) ( ) zyxpwz
pvy
pux
δδδ
∂
∂+
∂
∂+
∂
∂−
( ) VUp δ⋅∇−= (11.3)
3) The rate of work done on the body of a mass element by the external CORIOLIS
FORCE (equation 7.2) may be written as:
UF ⋅ = )UU2(m ⋅×Ω−δ = )UU2(m ×⋅Ω−δ = 0 (11.4)
(because wind Coriolis force)

25
4) The rate of work done on the body of a mass element by the GRAVITY FORCE
(equation 8.6) may be written as:
UF ⋅ = Ugm ⋅δ = Ug)V( ⋅ρδ = VUg ρδ⋅ = Vgwρδ− (11.5)
where kgg −= is the gravity force par unit mass
From equations (11.2), (11.3), (11.4) and (11.4), the RATE OF CHANGE IN THE
TOTAL THERMODYNAMIC ENERGY (equation 11.1) can now be written as:
( ) VgwVUpVJV)UU2
1e(
dt
dρδ−δ⋅∇−ρδ=
ρδ⋅+ (11.6)
Apply the chain rule of differentiation
( ) VgwVUpVpUVJ)V(dt
d)UU
2
1e()UU
2
1e(
dt
dV ρδ−δ⋅∇−δ∇⋅−ρδ=ρδ⋅++⋅+ρδ (11.7)
As a result of the conservation of mass, equation (10.7), 0)m(dt
d)V(
dt
d=δ=ρδ and divide
with Vδ
ρ−∇⋅−⋅∇−ρ=⋅ρ+ρ gwpUUpJ)UU2
1(
dt
d
dt
de (11.8)
Terms above brackets is the same as in equation (A)
in Appendix A which is the balance of mechanical energy.
The remaining terms represent the thermal energy by internal heating.
If we replace equation (A) in Appendix A in equation (11.8), equation (11.8) becomes

26
UpJdt
de⋅∇−ρ=ρ (11.9)
which is the thermal energy equation that can also be written as
Up
dt
deJ ⋅∇
ρ+= (11.10)
• We finally replace the following terms in equation (11.10)
Let the internal energy per unit mass Tce v= which yields
dt
dTc
dt
)Tc(d
dt
dev
v ==
where 11
v KJkg717c −−= (specific heat at constant volume Vδ )
• According to continuity equation (10.7) dt
d1U
ρ
ρ−=⋅∇ .
Replacing this into Up
⋅∇ρ
yields
dt
d1
dt
d)(
dt
dp
dt
dp
dt
dp 12
2
α=
ρ=ρ=
ρρ−=
ρ
ρ− −−
where ρ
=α1
to obtain the general form of the THERMODYNAMIC ENERGY EQUATION:
dt
dp
dt
dTcJ v
α+= (11.11)
The second term on the right that describes the rate of work done (per unit mass)
represents a conversion between thermal and mechanical energy. This conversion
process enables the solar heat energy to drive motions in the atmosphere.

27
APPENDIX A
As indicated in equation (9.10) the MOMENTUM equation in vector format can be
written as:
rFU2gp1
dt
Ud+×Ω−+∇
ρ−=
Neglect rF because it is regarded as small, and apply ( ⋅U )
UU2UgUp1
dt
UdU ⋅×Ω−⋅+⋅∇
ρ−=⋅
Multiply with ρ and let gwUg −=⋅ ; 0UU2UU2 =×⋅Ω−=⋅×Ω− ; dt
UdU2
dt
)UU(d⋅=
⋅
gwUpdt
)UU(d
2
1ρ−⋅∇−=
⋅ρ
gwpU)UU2
1(
dt
dρ−∇⋅−=⋅ρ (A)
which represents the balance of mechanical energy as a result of the movement of the
volume, which is known as the mechanical energy equation.





![Prefabricated Ducts - alnor.com.pl · Galvanisation - type of metal, poliuretan - type of fabric type fabric width A [mm] ... Galvanized pipe RURA and bolts WKD create a set of elements](https://img.pdfslide.tips/doc/110x75/5ad517ad7f8b9a1a028ca967/prefabricated-ducts-alnorcompl-type-of-metal-poliuretan-type-of-fabric.jpg)