Embed Size (px)
Citation preview

I SBAI - UNESP - Rio Claro/SP - Brasil
o CONTROLE EM CASCATA PARA MANIPULADORES
CONSIDERANDO A DINÂMICA DOS ATUADORES E A FLEXIBILIDADE
RAUL GUENTHER
Depar~.Engenharia Mecânica - UFSC -Caixa Pos~al 476 - 88.039/970 - Florianópolis - SC -
RESUMO - Es~e ~rabalho ~ra~a do proje~o de con~roladores para o seguimen~o de ~raje~órias em manipuladores quando a dinâmica dos a~uadores e a f'lexibilidade é levada em con~a, no caso onde se consideram as incer~ezas paramé~ricas. Sis~ema~iza-se um novo enfoque através do qual a ordem do sistema dinâmico do manipulador é reduzida à ordem do manipulador rígido sem que as propriedades de es~abilidade ob~idas no caso rígido sejam modif'icadas. A técni ca de control e ob~i da é apl i cada ao caso dos mani pul adores com ~ransmissões f'lexíveis. Apresentam-se resultados de simulações que comprovam a ef'iciência da ~écnica.
1 - INTRODUÇÃO Nos manipuladores ora em uso indus~rial, ~odos os componen~es
do mecanismo e dos a~uadores são cons~ruidos de forma a serem bas~ante rígidos. Além disso, em uma boa par~e deles a dinâmica dos atuadores é mais rápida do que a do mecanismo. Estas carac~erísticas permitem utilizar, para fins de análise, uma i deal i zação dos mani pul ador es , chamada de Node L o Rí (fi do C MR) , cons~ruida considerando: H1- Os efei ~os dos deslocamentos elásticos suficientemente pequenos para serem desprezados; H2- Que as forças ou ~orques aplicados às jun~as do mecanismo pelos a~uadores são os sinais de con~role.
Este modelo rígido pode ser represen~ado por um sis~ema de equações não lineares acopladas que ~em várias propriedades es~ru~urais, das quais cumpre des~acar: Pl- Que exis~e um sinal de con~role para cada grau de liberdade, e por isso o sis~ema é di~o
totaLmente acionado; P2- Que o mapeamento entre o sinal de con~role e a velocidade nas juntas é passi vo COr~ega e Spong 1988) .
Es~as duas propriedades f'ormam a base ~eórica para o con~role baseado na dinâmica inversa e para o con~role baseado na passividade, duas es~ra~égias cujas leis de controle usadas no MR propiciam es~abilidade global à malha f'echada, tan~o para o caso em que os con~roladores são de ganhos f'ixos, como para o caso adap~a~i vo.
As f'orças e ~orques apl i cados às j un~as do mecani smo do manipulador são geradas por a~uadores elé~ricos, hidráulicos e pneumá~icos, que ~êm dinâmica própria (dinâmica dos at1.1adores).
- 473-

I SBAI - UNESP : Rio Claro/SP - Brasil
Além disso, cada component.e do mecanismo e das t.ransmissões de moviment.o ent.re os at.uadores e as junt.as é uma font.e de flexibilidade nos manipuladores.
Result.ados t.eóricos e experiment.ais CGood et. aI. 1985, Reed e Ioannou 1988, Tar n et. aI. 1991) most.r am que ao usar o modelo rlgido no projet.o do cont.rolador int.roduzem-se limit.es ao emprego dos manipuladores que são: Ci) o uso rest.rit.o · a moviment.os com pequenas velocidades, quer seja por problemas de est.abilidade ou de erros de rastreament.o signií'icativos; Cii) o uso rest.rit.o a tarefas em que a precisão exigida é pequena. Estes limit.es podem ser vist.os como os limites inerent.es ao emprego do modelo rlgido, e uma maneira de supera-los é a inclusão da dinâmica dos at.uadores e da flexibilidade no modelo do manipulador.
Ao incluir a dinâmica dos at.uadores e a í'lexibilidade no modelo do manipulador o número de graus de liberdade passa a ser maior do que o número de sinais de cont.role. O sist.ema dinâmico passa a ser parciatmente acionado e, por isso, não é posslvel cancelar diret.ament.e as não linearidades, nem obt.er uma relação passiva ent.re a ent.rada e uma salda que se deseja controlar. Assim, o controle baseado na dinâmica inversa e o cont.role baseado na passi vidade não podem ser aplicados diret.ament.e. Em out.ras paI avras, os cont.rol adores desenvol vi dos para o MR não podem ser aplicados diretament.e.
O exame dos principais t.rabalhos divulgando o projet.o de controladores para o seguiment.o de t.rajet.órias quando a dinâmica dos atuadores e a flexibilidade das t.ransmissões é considerada most.ra que , no caso onde se consideram as incert.ezas paramét.ricas, existem dois enfoques para t.rat.ar do problema.
No primeiro a ordem do sist.ema é reduzida à ordem do · MR ut.ilizando o mét.odo das pert.urbações singulares CSpong 1989, Ghoerbel e Spong 1992, Khorasani 1992). Busca-se com isso ut.ilizar os result.ados já obt.idos no desenvolviment.o de cont.roladores adapt.ativos para o MR . A redução da ordem é feit.a "separando" os movimentos lent.o Ccorrespondent.e à parcela rlgida) e rápido Ccorrespondent.e à parcela adicional). Assim, int.roduzindo um controte corret ivo para amort.ecer a parcela rápi da, efet.ua-se a análise considerando que ao moviment.o lent.o é superpost.o um moviment.o rápido amort.ecido.
Em Reed e Ioannou 1988 most.ra-se que a ut.ilização do algorit.mo de Slot.ine e Li 1987 com a modificação-o no MR ao qual é superpost.a uma dinâmica elét.rica C amor t.eci da) não modelada, result.a em estabitidade Locat. Além disso, é necessário que os ganhos no cont.rolador sejam pequenos, o que limit.a o desempenho. Est.e resul t.ado permi t.e concl uir que amort.ecendo o moviment.o rápido at.ravés de um cont.role corret.ivo e cont.rolando o moviment.o lent.o at.ravés do algorit.mo de Slot.ine e Li com a modificação-o, como nos t.rabalhos cit.ados, a est.abilidade sempre result.ará tocat, além dos ganhos no cont.rolador t.erem que ser pequenos, mOdi f i cando essenci aI ment.e o r esul t.ado obt.i do par a o caso rlgido onde a est.abilidade é global e não exist.em rest.rições teóricas quant.o ao ganho nos cont.roladores.
A out.ra limit.açãb dest.a forma de reduzir a ordem é inerent.e a
- 474 -

I SBAI - UNESP - Rio Claro/SP - Brasil
aplicação do mé~odo das per~urbações singulares (validade res~ri~a ao caso em que as cons~an~es de ~empo da dinâmica dos a~uadores e as flexibilidades são suficien~emen~e pequenas).
No segundo enfoque o si s~ema di nâmi co i ncl ui ndo as flexibilidades nas ~ransmissões é considerado como um ~odo para rins de con~role CNicosia e Tomei 1991,1992, Lozano e Broglia~o
1992). Busca-se, assim, evi~ar as limi~ações resul~an~es da u~ilização do mé~odo das per~urbações singulares. Desenvolvido mais recen~emen~e, os resul~ados ob~idos a~é o momen~o tiem sempre são gerais, e os con~roladores propos~os são complicados.
Nes~e ~rabalho sis~ema~iza-se a propos~a de um ~erceiro
enfoque, apresen~ado inicialmen~e para o caso par~icular dos manipuladores com ~ransmissões flexíveis em Hsu e Guen~her 1993, e para manipuladores rígidos acionados elé~ricamen~e em Guen~her e Hsu 1993a. In~roduz-se uma ~écnica de con~role em casca~a a~ravés da qual a ordem do sis~ema é reduzida à do MR, sem a necessidade de impor condições sobre as cons~an~es de ~empo dos a~uadores e sobre a flexibilidade das ~ransmissões.
Além disso, para os casos es~udados a ~écnica em casca~a
resul~a em malhas fechadas globalmen~e es~áveis, ou localmen~e
es~áveis com um domínio de es~abilidade arbi~rariamen~e grande. A ~écnica de con~role em casca~a aqui apresen~ada permi ~e,
por~an~o, aprovei~ar os numerosos resul~ados já ob~idos no desenvolvimen~o de con~roladores para o MR, sem in~roduzir
res~rições essenciais ao emprego dos con~roladores proje~ados para o MR.
2- UMA TÉCNICA DE CONTROLE EM CASCATA A ~écnica de con~role em casca~a propos~a nes~e ~rabalho é
inspirada na es~ra~égia de desacoplamen~o apresen~ada por U~kin
1987 para sis~emas dinâmicos descri~os por
x = 1
n-m m onde x1~ ,x2~
proje~ada ~al que n-m
x1de~)~ .
m e u~ , quando a lei de
o ve~or siga uma
(1)
(2)
con~role "u" deve ser
~raje~ória desejada
De acordo com U~kin 1987 ~oma-se o subve~or de es~ados
como sinal de con~role do subsis~ema (1), e es~abelece-se
·n-m m , ó : IR ... IR
o (3)
seguindo algum cri~ério de performance. Define-se en~ão uma variedade sex
1,x
2) come
- 475-

I SBAI - UNESP - Rio Claro/SP - Brasil
(4)
e projeta-se uma sCx
1,x
2)=O Vt>t
a,
lei onde t
de controle "u" descont.ínua tal que é o tempo para a trajetória do sistema a
atingir.:: hipersuperfície sCx1 ,x2 )=O. Quando s(xl'~Z)=O' o sistema
em malha fechada esta no modo deslizante, e Cl) é um sistema de ordem reduzida controlado por x
2 segundo a lei (3).
Para o controle em cascata considera-se o caso em que h1
é
linear em x2
e (1)(2) pode ser reescrito como
x = 1
(5)
(6)
onde f2
=h2
, adotada para simplificar a notação .
Definindo x2d
como o sinal de comando de (5), e o erro de
rastreamento
(7)
e substituindo (7) em (5), obtem-se
(8)
(9)
A equação (8) pode ser vista como um subsistema dinâmico controlado por x 2d ' no qual atua uma perturbação dCt)= Bl(X1,t)~2.
O controle em cascata consiste em controlar o subsistema (8) através de x
2d' de t'orma que xl siga x1d(t), e fazer x 2 no
subsistema (9) seguir x2d
(t), aplicando um sinal de controle uCt).
Observação 2.1 A lei para o sinal x2d
é projetada para o
subsistema (8), cuja ordem é n-m. Assim, o controle em cascata proposto pode ser visto como uma técnica de redução da ordem. •
Sempr e que as equações do movi mento do mani pul ador puder em ser escritas na forma (8)(9), a técnica em cascata aqui apresentada pode ser aplicada. Na seção 3 apresenta-se sua aplicação aos manipuladores com transmissões flexíveis.
3- O CONTROLE EM CASCATA NOS MANIPULADORES COM TRANSMISSõES FLEXÍVEIS
Seja um manipulador com elos rígidos e "n" juntas de rotação, cujo movimento é descrito pelo seguinte modelo (Spong 1989)
- 476-

I SBAI - UNESP - Rio Claro/SP - Brasil
II ••
IX ql ) ql +CC q1 ' q1 ) q1 +gC q1 ) +K[ ql -q2] = O Cl0)
Cl1)
d [Rn - t. on e ql E e o ve or posi ção angul ar dos elos;
posi ção angul ar dos rot.ores; D é a mat.r i z de i nérci a; Cql é o
vet.or de t.orques cent.rífugos e de Coriolis; g é o vet.or de t.orques gravit.acionais; J é a mat.riz diagonal const.ant.e das inércias dos rotores; K é a matriz diagonal das constant.es de mola das t ransmi ssões; uelRn é o vetor torque de ' control e apl i cado aos rotores.
Chamando u e =-K(ql -q2) de torq-ue eLást ico pode-se reescrever I I ••
Cl0) como IXql)ql+CCql,ql)ql+gCql)= ueCQ1,Q2).
O torque el ást.i co para que a posi ção dos elos Ql si ga a
trajetória desejada para os elos QldCt) é u ed . Então, a posição -1
desejada para os rotores q2d pode ser definida como q2d=K ued+ql· "-
Assim, com o erro na posição dos rotores dado por q2=q2-q2d
pode-se reescrever Cl0)Cll) como
(12)
(13)
o sist.ema (12)C13) est.a na forma (8)C9) . Ent.ão o projet.o do cont.rolador em cascat.a consist.e em: Ci) Estabelecer uma lei para u ed t.al que ql siga qldCt) de maneira
estável na presença da perturbação dCt)=KQ2;
Cii) Estabelecer uma lei de controle uCt) em (13) tal que Q2 siga
Q2dCt).
Em Hsu e Guenther 1993 apresent.a-se o projet.o do cont.rolador em cascat.a para o caso em que os parâmet.ros do manipulador cont.ém incertezas e a flexibilidade das t.ransmissões é arbitrária . A lei para u ed é projet.ada com base no esquema adapt.at.ivo de Slot.ine e
Li 1987 para manipuladores rígidos, e para U é proposta uma lei de cont.role a est.rut.ura variável. Est.a combinação é denominada VS-ACC CVariable St.ruct.ure Adaptive Cascade Cont.rol).
A hipót.ese de que a mat.riz de rigidez K cont.ém incert.ezas impede a aplicação diret.a do esquema de Slotine e Li. Por isso é nece~fário modificar o esquema de modo a gerar diretament.e o sinal ur=K u ed =Q2d-Q1 e assim Q2d' sem conhecer K.
Para t.ant.o int.roduz-se uma superparamet.rização at.ravés da qual os parâmet.ros da flexibilidade são absorvidos em um vet.or de
- 477-

I SBAI - UNESP - Rio .Claro/SP - Brasil
parâme~ros aumen~ado. En~ão, u~ilizando uma lei do gradiente com a
modificação-o na adap~ação dos parâme~ros o sinal u é gerado. r
Para fazer q2 seguir a ~raje~6ria desejada q2d define-se o
erro auxi 1 i ar
Propõe-se a seguin~e lei de con~role
(14)
onde u é o
o controLe nominaL, proje~ado de acordo com os
parâme~ros
diagonal
nominais do manipulador; ~2=K~>O é uma ma~riz de pr oj e~o; [ sgnC s2)] =[ sgnC s21) ... sgnC s2n)] ;
M(~)=diag[m.(~)] .-1 e m.(~) são funções de moduLação dos 1. 1.-, .. ,n 1.
rel.és. Observação 3.1 (propriedades de estabilidade) Em Hsu e Guen~her
1993 mos~ra-se que no sis~ema em malha fechada formado pelo manipulador com ~ransmissões flexíveis e pélo VS-ACC, (i) q2C~) é
uniformemen~e limi~ado e q2Ct)~O com ~~OO de forma exponencial;
Cii) A es~abilidade é global; Ciii) qlC~) e qlC~)~O quando t~oo. •
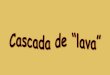
4- RESULTADOS DE SIMULAÇÕES Em Guen~her e Hsu 1993b mos~r a -se como é fei ~a a
implemen~ação da es~ra~égia de con~role em casca~a para o manipulador com ~ransmissões flexíveis de dois elos propos~o como exemplo padrão CEP) para sis~emas rob6~icos em Troch e Desoyer C 1990) C Fi g. 1) .
Figura 1 - O manipulador com dois elos.
- 478-

I SBAI - UNESP - Rio Claro/SP - Brasil
Os dados do EP são
I i 1. [m) m. [kg) 1 Ci [m) 2 I./J.[kg.m)
1. 1. 1. 1.
1 0.45 100 -0.15 5.25/4.77 2 0.20 25 -0.10 0.51/3.58 3 - 40 0.20 7.58/-
onde mi
• i =1 .2 são as massas dos el os +at.uadores ; m3 é a massa do
e:fet.uador+carga; I i .i=1.2 são as inércias dos elos+at.uadores; !3 é
a inércia do e:fet.uador+carga; J . • i=1.2 são as inércias dos 1.
rot.ores; 1 i • i =1 .2 são os compr i ment.os dos elos; 1 Ci • i =1.2 são as
coordenadas dos cent.ros de gravidade das massas m . . l.
O EP não t.em dados da rigidez nas t.ransmissões. Nas simulações adot.a-se uma rigidez k.=30000 N.m/rad Ci=1.2).
l.
semelhant.e a dos "harmonic drives" do PUMA 560. para caract.erizar uma sit.uação com transmissões fLexíveis. Simula-se t.ambém um exemplo em que a r i gi dez é 10 vezes menor com o obj et.i vo de investigar o comport.ament.o em sit.uações nas quais as transmissões são muito fLexíveis.
A incert.eza na inércia é devida ao desconheciment.o da massa m
3 no ef'et.uador. Considera-se que o valor verdadeiro é o valor
máximo m3 =40 kg. e que o valor nominal é a met.ade do máximo. Para
as demais grandezas assume-se uma incert.eza de 10%. A trajet.ória desejada começa em qlldCO)=-90o q12dCO)=Oo e
o o at.inge a posição de regime qlld(1)=-67.5 e q12d(1)=22.5 em 1
segundo de acordo com uma ~unção descrita por um polinômio de ga ordem CFig.3).
8.5 fi 1J. [gl'au.s] ,.5
1 fi 12 [gl'aus]
vs-acc vs-acc
pd pcl
-1
-1.5l 2 1 2 3 li 1
5e!J
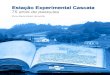
Figura 2 Erros de rast.reament.o para o manipulador com transmissões :flexíveis. ut.ilizando um cont.rolador de ganhos :fixos CPD) e o cont.rolador em cascat.a CVS-ACC).
-479 -

[ SBAI - UNESP - Rio qaro/SP - Brasil
"-Na Fig.2 estão apresentados os erros de rastreamento qll e
obtidos nas simulações realizadas com o manipulador com
transmissões Il exíveis, empregando um controlador proporcional -derivativo com uma parcela "feedforward" correspondente à inércia nominal CPD) , e usando o VS-ACC. Os ganhos da parc~la PD são os mesmos nos dois casos. Os resultados mostram que o VS-ACC elimina o erro de regime característi~o do controlador PD.
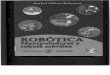
Na Fig.3 estão apresentados os resultados obtidos para o manipulador com transmissões muito flexíveis. Neste caso a utilização do controlador PD resulta em grandes oscilições e erros de regime, que são ambos eliminados com o emprego do VS-ACC.
Figura 3
18 I
I
[gl'aus]
a~ __ ~ ____ ~ __ ~ e 1 2 3
1i8!J
1111
-18
4
-2
-4
q~1[gl'allS] \ts-acc
1 2
q 1.2 [gl'aus]
pd
Trajetórias desejadas Cqlld e q12d) para os elos,
trajetórias obtidas com um controlador PD Cqll e q12) e erros de
rastreamento para um manipulador com transmissões muito flexíveis, utilizando um controlador de ganhos fixos CPD) e o controlador em cascata CVS-ACC).
- 480-

I SBAI - UNESP - Rio Claro/SP - Brasil
5- CONCLUSõES A ~écnica de con~roleem casca~a sis~ema~izada nes~e ~rabalho
se cons~i~ue em um enfoque al~érna~ivo ao que emprega o mé~odo das per~urbações singulares par.a ob~er a redução da ordem em mani pul ador es onde a di nâmi c a dos a ~ uador es e a f 1 exi bi li dade é considerada. Tem como van~agens o fa~o da sua validade ser para cons~an~es de ~empo e flexibilidades arbi~rárias, e da malha fechada resul~ar globalmen~e es~ável, sem res~rições ~eóricas
quan~o ao ganho dos con~roladores. A aplicação do con~role em casca~a no caso em que os
parâme~ros do manipulador são incer~os é fei~a combinando ~écnicas de con~role adap~a~i vo com uma lei a es~ru~ura variável. As simulações mos~ram a eficiência do con~rolador assim ob~ido para o caso do manipulador com ~ransmissões flexíveis, que ~ambém foram cons~a~adas em mani pul adores r í gi dos aci onados el é~r i cament.e (Guen~her and Hsu 1993a).
Na con~inuidade do ~rabalho será in~eressan~e inves~igar a aplicabilidade do mét.odo ao caso em que exis~e a superposição dos efei~os da dinâmica elé~rica e da flexibilidade nas t.ransmissões.
REFERÊNCIAS
Good,M. C. ,L. M. Swee~ and K. L. St.robel (1985) "Dynamic Con~rol Sys~em Design of Int.egra~ed Robo~ and Dri ve Trans.of ASJ1E,..J. Dyn. Syst. ,J1eas.and Contro~ (107),53-59:
Models for Sys~ems".
Ghorbel,F.and M.W.Spong (1992) "Adap~ive In~egral Manifold of Flexible ~Toin~ Robo~s Manipula~ors". Proc. IEEE Int. Conf. on Robotics and Automation,Nice,France,707-714.
Guen~her R. and L.Hsu (1993a) "Variable S~ruc~ure Adap~ive Cascade Con~rol of Ri gi d-Li nk El ec~r i call y-Dr i ven Robot. Mani pul at.ors". Submi~ed t.o t.he 32nd COC.
Guen~her R. e L. Hsu (1993b) "O Proje~o de um Con~rolador em Casca~a para Manipuladores com Transmissões Flexíveis". Subme~ido
ao COBEM 93.
Hsu,L. and R.Guent.her (1993) "Variable S~ruc~ure Adap~ive Cascade Con~rol of Mul~i-link Robo~ Manipula~ors wi~h Flexible Join~s: The Case of Arbi~rary Uncer~ain Flexibilit.ies". Proc. IEEE Int. Conf. on Robotics and Automation, A~lant.a, May 1993.
Khorasani ,K. (1992) "Adapt.ive Con~rol of Flexible Joint. Robo~s".
IEEE Trans. Robotics and Automation, 8 (2),250-267.
Lozano,R.and B.Brogliat.o (1992) "Adapt.ive Cont.rol of Robot. Manipula~ors wit.h Flexible Joint.s".IEEE Trans.Automatic Contro~,37 (2),174-181.
Nicosia,S.and P.Tomei (1991)"A New Approacht.o Cont.rol Elas~ic J oi nt. Robo~s wi ~h Appl i ca t.i on ~o Adap~i ve Con~r 01 " . Proc. IEEE 30 t h
- 481 -
-------

I SBAI - UNESP - Rio Claro/SP - Brasil
CDC, Brighlon, England, 343-347.
Nicosia,S. and P. Tomei (1992) "A Melhod lo Design Adaplive Conlrollers f'or Flexible Joinl Robols". Proc. IEEE 1992 Int. Conf. on Robotics and Automation,Nice,France, 701-706
Orlega,R. and M. W. Spong (1988) "Adaplive molion. conlrol of' rigid Robot..s: a t.. ulor i aI " . Proc. IEEE 27 t h CDC, Aust..i n , 1575-1584.
Reed,J. S. and P. A. Ioannou (1988) "Inslabilily Analysis and Robusl Adapt..ive Cont..rol of' Robolic Manipulalors". Proc. 27th IEEE CDC, 1607-1612.
SI ot..i ne J. J. E. and W. Li (1987) "On lhe adapli ve conlrol of' robo).manipulat..ors". Int. J. Robotics Research 6 (3), 49-59.
Spong,M.H.(1989) "Adapt..ive Cont..rol of' Flexible Joinl Mani pul at..ors". Systems and Control. Let ters (13),15-21.
Tarn,T-J, A.K.Bejczy, X.Yun and Z.Li (1991) "Ef'f'ecl of' Dynami cs on Nonl i near Feedback Robol Arm Conlrol ". Trans.Robotic and Automation, 7 (1), 114-122.
Molor IEEE
Troch r. and K. Desoyer (1990) "Benchmark Robolic Syslem". IFAC Theory Committee Report, 45-49.
Ulkin, V. I. (1987) "Disconlinuous Conlrol Syslems: Slale of' Arl in Theory and Applicalions". Preprints IFAC 10th Word Con(5ress on Automatic Control., Munich,vol.1, 75-94.
- 482-