Embed Size (px)
Citation preview
Observateurs adaptatifs pour la commande sanscapteur des machines asynchrones : analyse de
stabilité
Erik ETIEN, Claude CHAIGNELAII - Université de Poitiers
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 1/34
Introduction
Commande RFOC sans capteur: estimationdu flux rotorique et de la vitesse.
Estimation de la vitesse
Méthode à base de modèleInjection de signaux
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 2/34
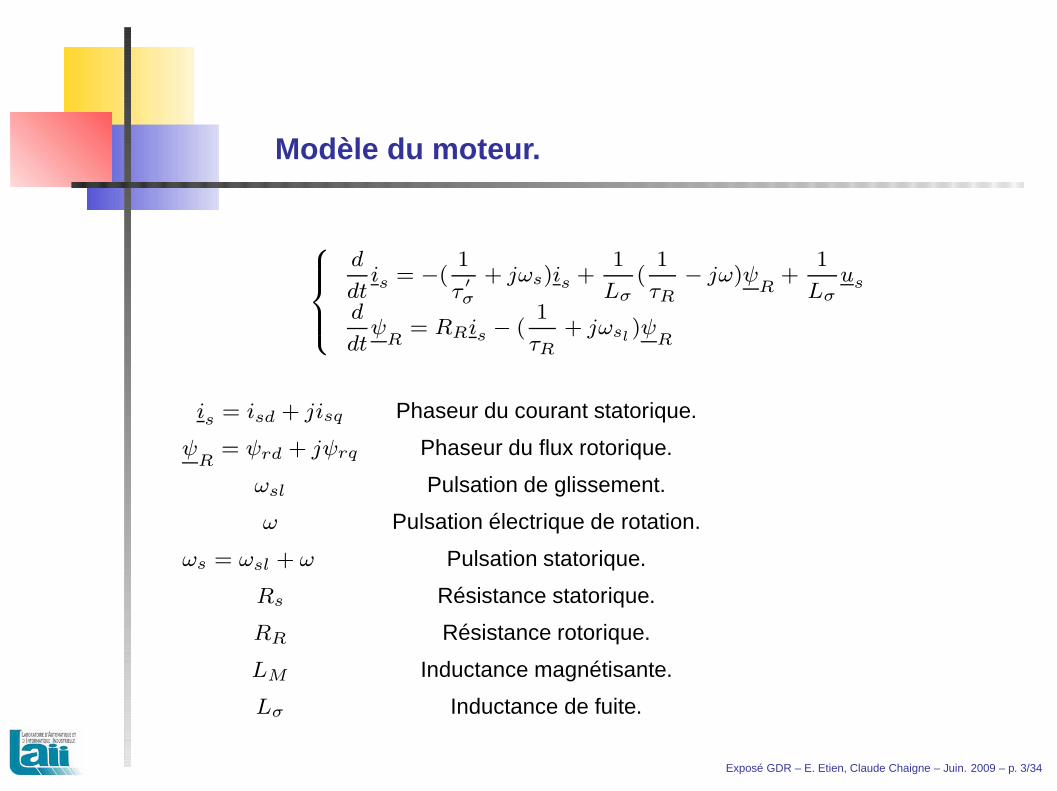
Modèle du moteur.
8>><>>:
d
dtis = −(
1
τ′
σ
+ jωs)is +1
Lσ(
1
τR− jω)ψ
R+
1
Lσus
d
dtψR
= RRis − (1
τR+ jωsl
)ψR
is = isd + jisq Phaseur du courant statorique.
ψR
= ψrd + jψrq Phaseur du flux rotorique.
ωsl Pulsation de glissement.
ω Pulsation électrique de rotation.
ωs = ωsl + ω Pulsation statorique.
Rs Résistance statorique.
RR Résistance rotorique.
LM Inductance magnétisante.
Lσ Inductance de fuite.
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 3/34
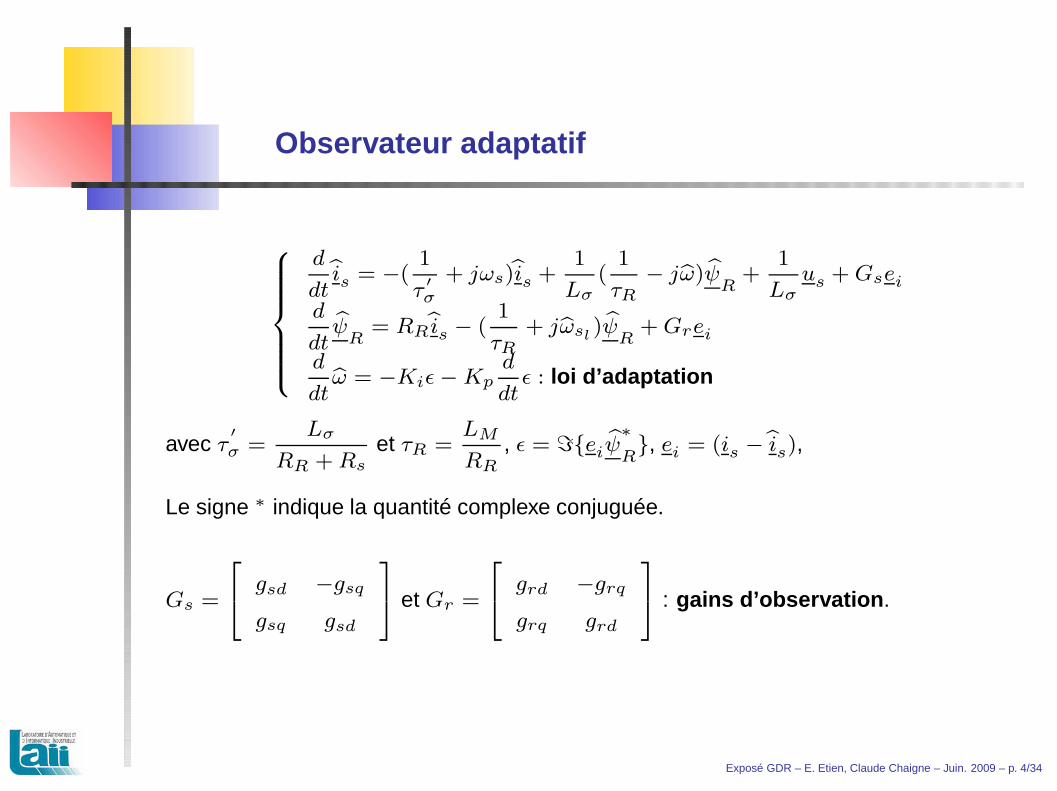
Observateur adaptatif
8>>>>><>>>>>:
d
dtbis = −(
1
τ′
σ
+ jωs)bis +1
Lσ(
1
τR− jbω) bψ
R+
1
Lσus +Gsei
d
dtbψR
= RRbis − (1
τR+ jbωsl
) bψR
+Grei
d
dtbω = −Kiǫ−Kp
d
dtǫ : loi d’adaptation
avec τ′
σ =Lσ
RR +Rset τR =
LM
RR, ǫ = ℑ{ei
bψ∗
R}, ei = (is −
bis),
Le signe ∗ indique la quantité complexe conjuguée.
Gs =
24 gsd −gsq
gsq gsd
35 et Gr =
24 grd −grq
grq grd
35 : gains d’observation .
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 4/34
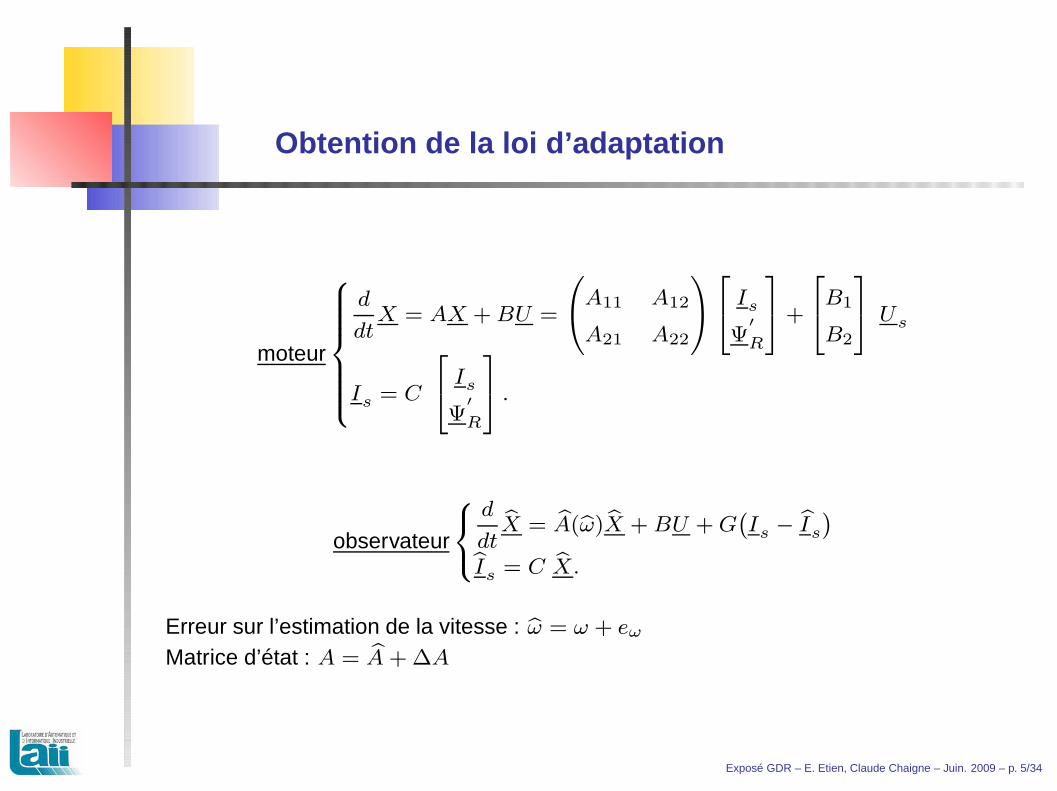
Obtention de la loi d’adaptation
moteur
8>>>>><>>>>>:
d
dtX = AX +BU =
0@A11 A12
A21 A22
1A
24 Is
Ψ′
R
35 +
24B1
B2
35 Us
Is = C
24 Is
Ψ′
R
35 .
observateur
8<:
d
dtbX = bA(bω) bX +BU +G
`Is −
bIs´
bIs = C bX.
Erreur sur l’estimation de la vitesse : bω = ω + eω
Matrice d’état : A = bA+ ∆A
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 5/34
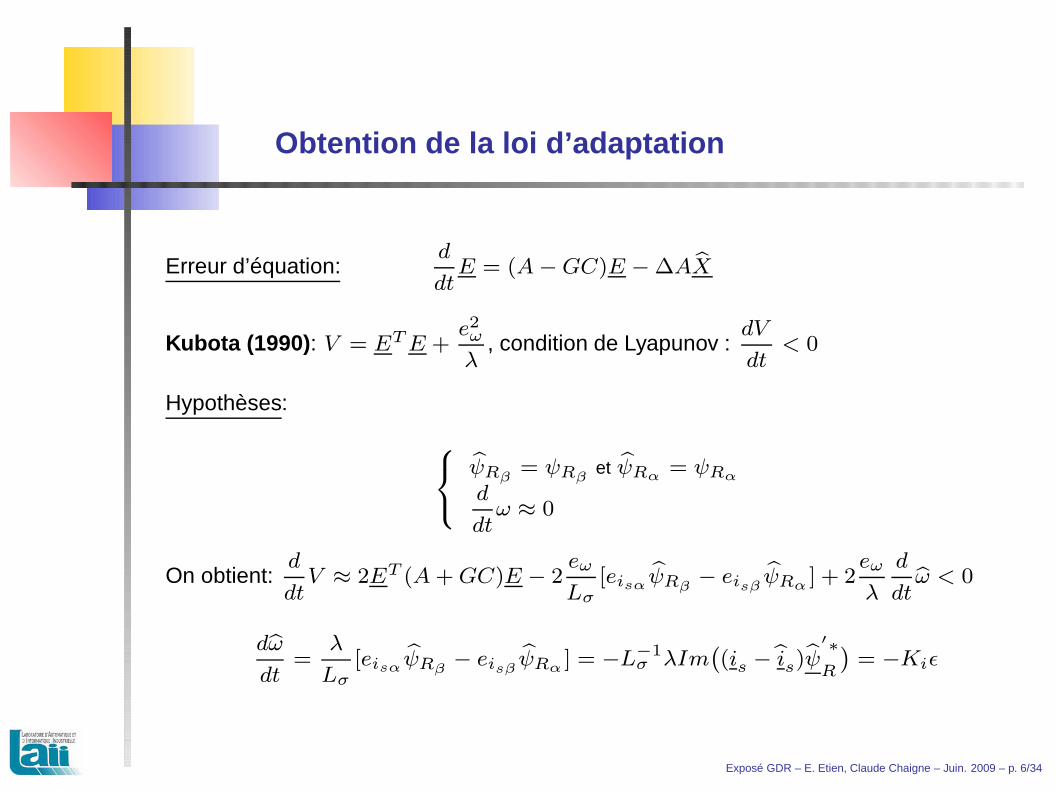
Obtention de la loi d’adaptation
Erreur d’équation:d
dtE = (A−GC)E − ∆A bX
Kubota (1990) : V = ETE +e2ωλ
, condition de Lyapunov :dV
dt< 0
Hypothèses:
8<:
bψRβ= ψRβ
et bψRα= ψRα
d
dtω ≈ 0
On obtient:d
dtV ≈ 2ET (A+GC)E − 2
eω
Lσ[eisα
bψRβ− eisβ
bψRα] + 2
eω
λ
d
dtbω < 0
dbωdt
=λ
Lσ[eisα
bψRβ− eisβ
bψRα] = −L−1
σ λIm`(is −
bis)bψ′∗
R
´= −Kiǫ
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 6/34
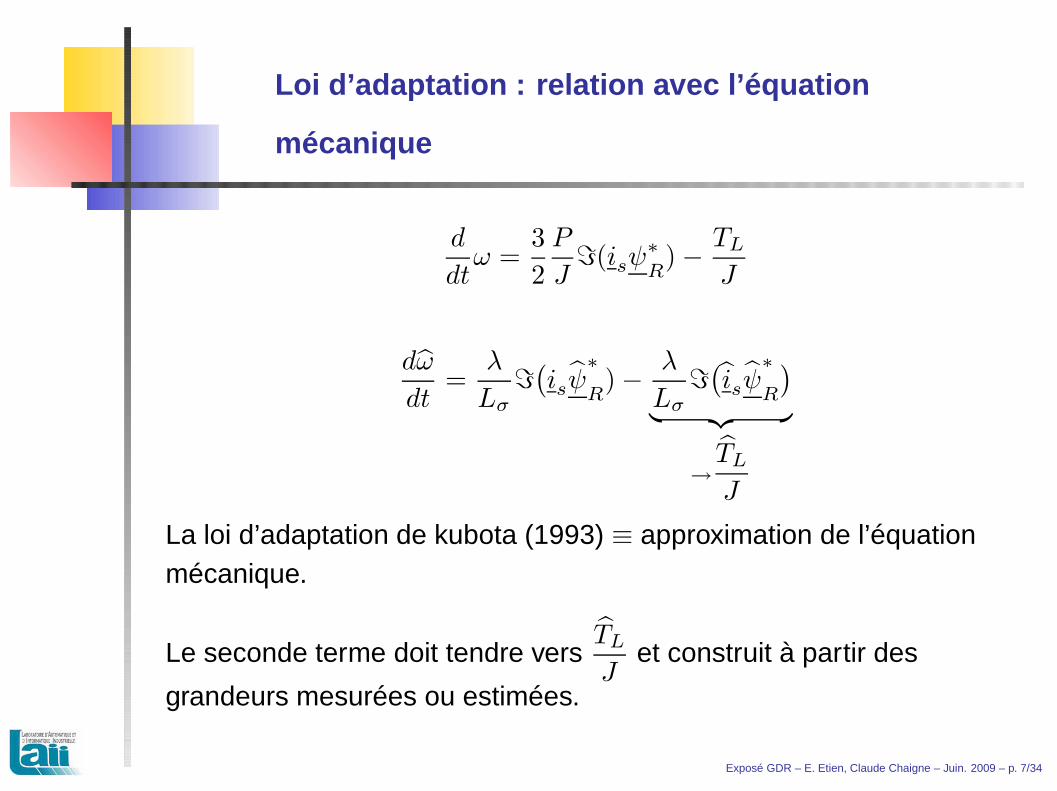
Loi d’adaptation : relation avec l’équation
mécanique
d
dtω =
3
2
P
Jℑ(isψ
∗
R) −
TL
J
dω
dt=
λ
Lσ
ℑ(isψ
∗
R) −
λ
Lσ
ℑ(isψ
∗
R
)
︸ ︷︷ ︸
→
TL
J
La loi d’adaptation de kubota (1993) ≡ approximation de l’équationmécanique.
Le seconde terme doit tendre versTL
Jet construit à partir des
grandeurs mesurées ou estimées.
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 7/34
Loi d’adaptation : écriture dans le repère lié au
flux rotorique
dω
dt=
λ
Lσ
(eisqψ∗
Rd − eisdψ∗
Rq)
RFOC = contrôle du flux rotorique estimé : → ψ∗
Rq = 0, ψ∗
Rd = ψREF
dω
dt=
λ
Lσ
eisqψREF =λ
Lσ
(isq − isq)ψREF
La loi d’adaptation de kubota (1993) est construite autour de l’erreurde courant sur l’axe q .
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 8/34
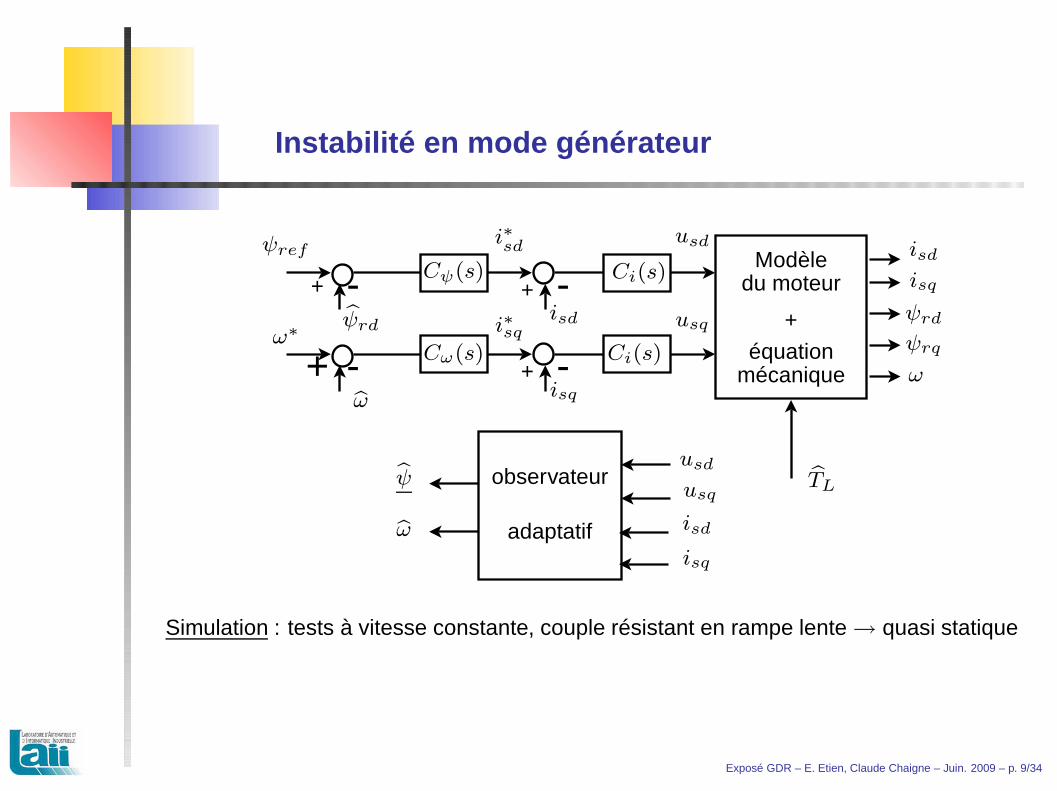
Instabilité en mode générateur
usd
-+
bTL
ω∗
bω+ -
i∗sq
-+
ψref
bψrd+ -
i∗sd
Cω(s)
Cψ(s)
Ci(s)
Ci(s)
isd
isq
usq
Modèle
équation
observateur
adaptatif
usdusq
isd
isq
bψ
bω
isdisq
ψrdψrq
ω
du moteur
+
mécanique
Simulation : tests à vitesse constante, couple résistant en rampe lente → quasi statique
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 9/34
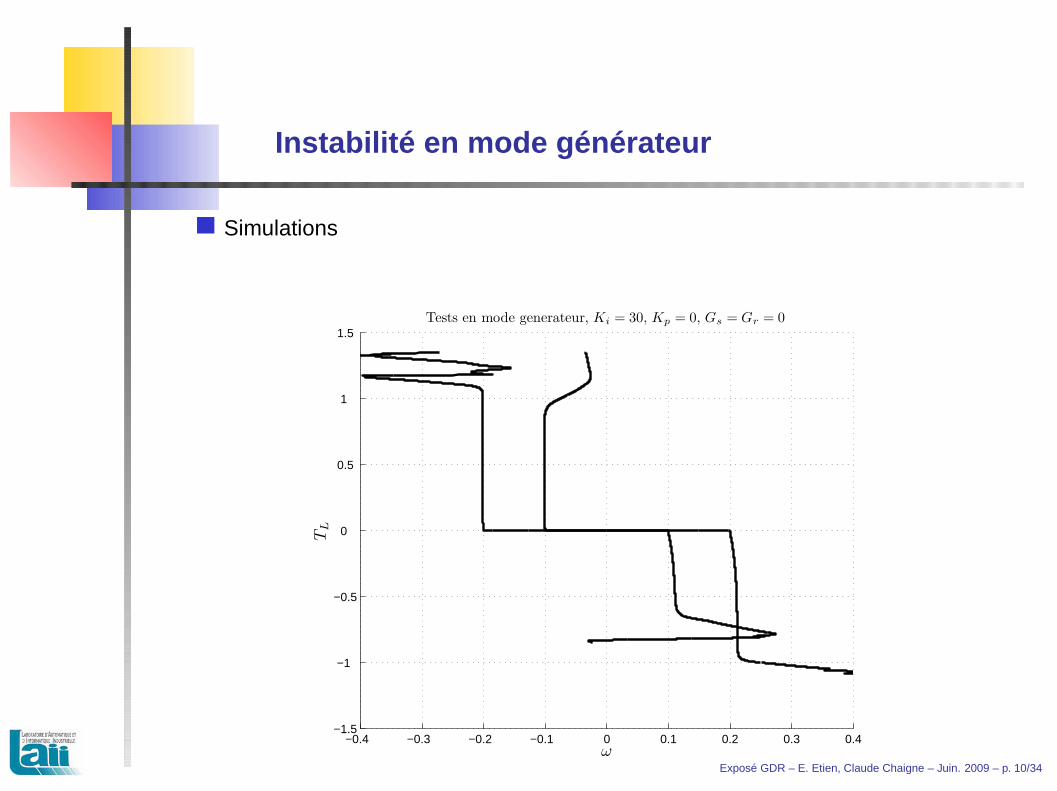
Instabilité en mode générateur
Simulations
−0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4−1.5
−1
−0.5
0
0.5
1
1.5 T
L
ω
Tests en mode generateur, Ki = 30, Kp = 0, Gs = Gr = 0
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 10/34
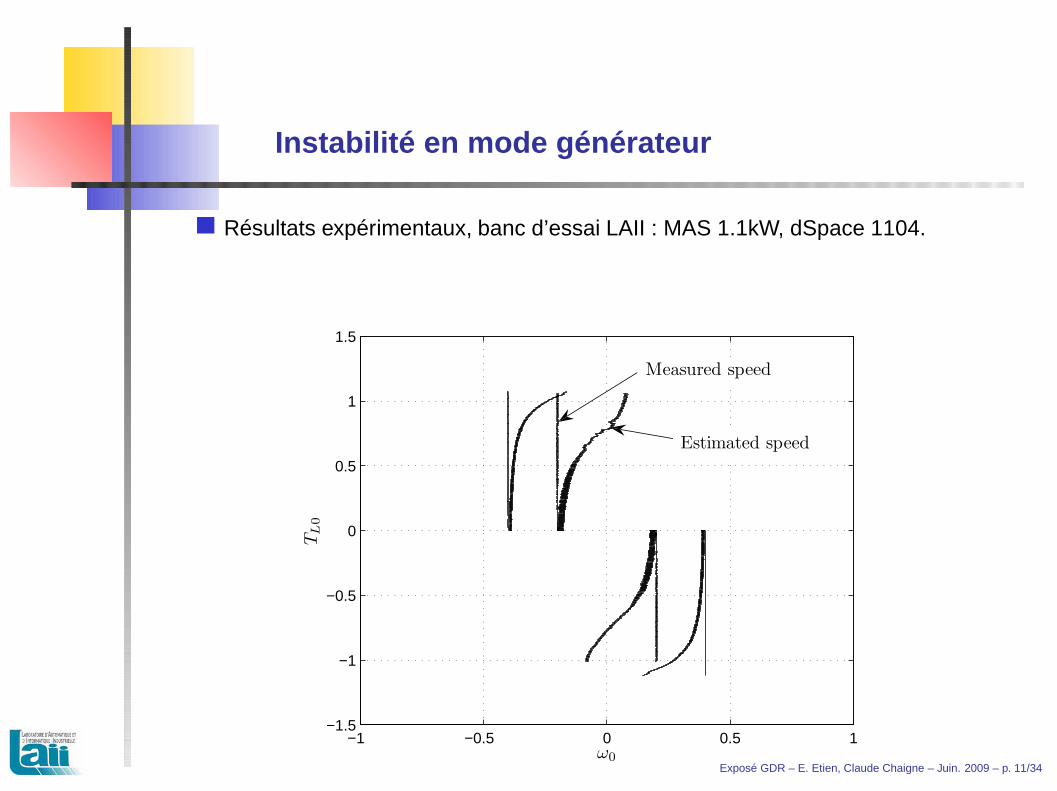
Instabilité en mode générateur
Résultats expérimentaux, banc d’essai LAII : MAS 1.1kW, dSpace 1104.
−1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5
ω0
TL
0
Estimated speed
Measured speed
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 11/34
Analyse de stabilité : méthodes classiques
Linéarisation du système d’erreur d’équation
Pôles de fonctions de transfert
H(s) =δeω(s)
δω(s)(Rashed et al., 2003)
H(s) =δeiq(s)
δeω(s)(Suwankawin et al., 2002)
Critère de Routh-Hurwitz
Localisation des zones instables dans le plan couple/vitesse
Synthèse des gains d’observation Gs et Gr ou de la loid’adaptation → stabilité
Remarque: conditions de stabilité pour le modèle nominal(paramètres connus)
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 12/34
Analyse de stabilité : localisation des pôles
instables
Linéarisation du système d’erreur d’équation
hypothèse kubota 1990 :
8>>>>><>>>>>:
d
dtis = −(
1
τ′
σ
+ jωs)is +1
Lσ(
1
τR− jω)ψ
R+
1
Lσus
d
dtψR
= RRis − (1
τR+ jωsl
)ψR
d
dtω = 0
Vecteur d’erreur : e = [ei eψ eω ]T , ei = (is −bis), eψ = (ψ
R− bψ
R) et
eω = (ω − bω)
Linéarisation : e = eo + δe
Système linéarisé : δe = bA1δe+ B1δu1
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 13/34
Analyse de stabilité : localisation des pôles
instables
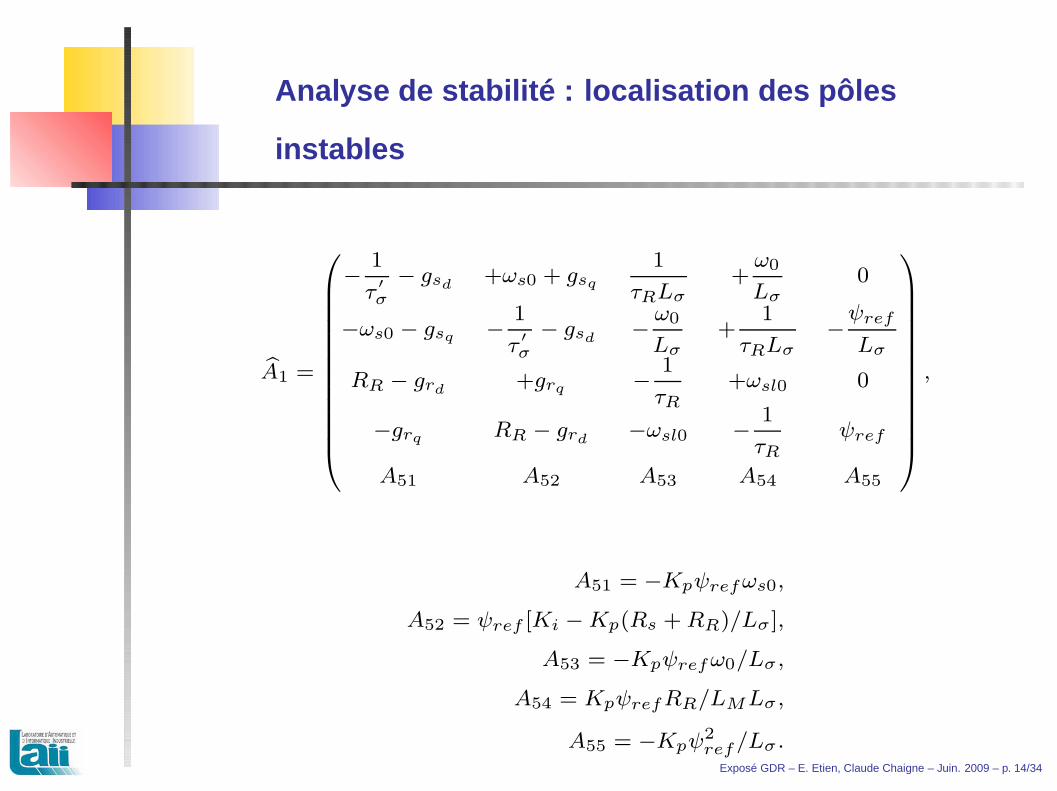
bA1 =
0BBBBBBBBBBBB@
−1
τ′
σ
− gsd+ωs0 + gsq
1
τRLσ+ω0
Lσ0
−ωs0 − gsq −1
τ′
σ
− gsd−ω0
Lσ+
1
τRLσ−ψref
Lσ
RR − grd+grq −
1
τR+ωsl0 0
−grq RR − grd−ωsl0 −
1
τRψref
A51 A52 A53 A54 A55
1CCCCCCCCCCCCA
,
A51 = −Kpψrefωs0,
A52 = ψref [Ki −Kp(Rs +RR)/Lσ],
A53 = −Kpψrefω0/Lσ,
A54 = KpψrefRR/LMLσ,
A55 = −Kpψ2
ref/Lσ.Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 14/34
Analyse de stabilité : localisation des pôles
instables
Valeurs propres instables
D(ω0,ωsl0) = {λi(A1(ω0, ωsl0)) : ℜ{λi(A1(ω0, ωsl0)) ≥ 0}}
Représentation dans le plan {ω0, ωsl0} → Relations classiques
ωs0 = ω0 + ωsl0 et TL0 =Pψ2
refωsl0
RR.
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 15/34
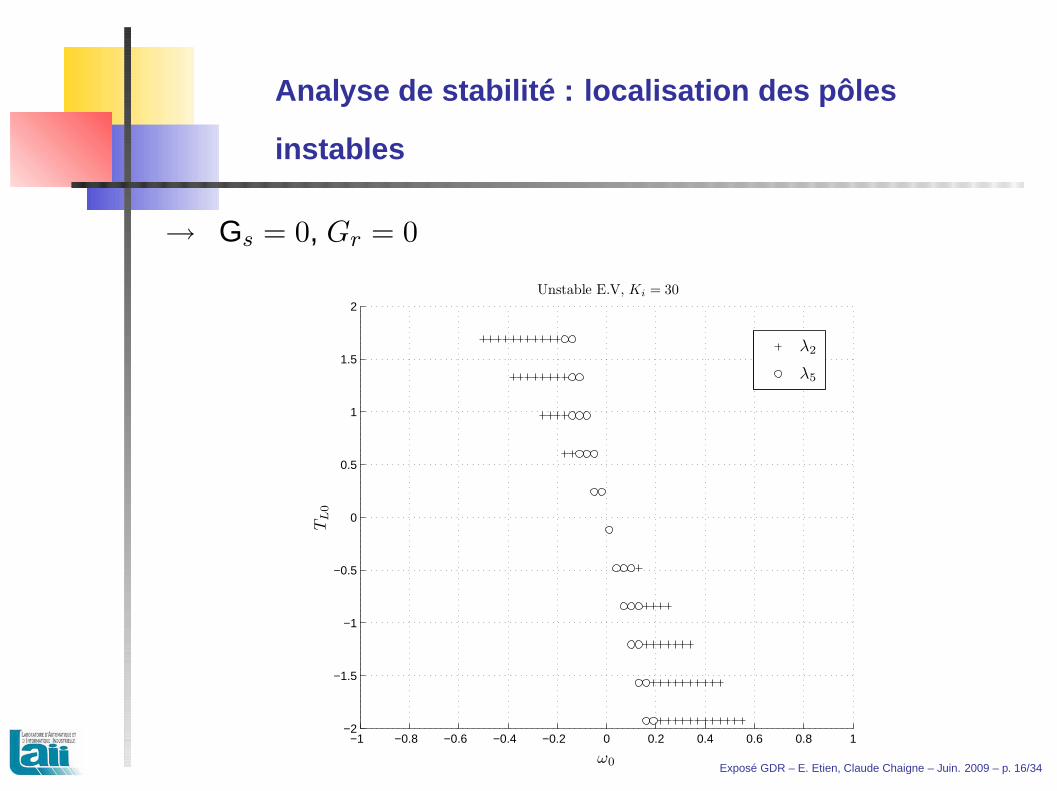
Analyse de stabilité : localisation des pôles
instables
→ Gs = 0, Gr = 0
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−2
−1.5
−1
−0.5
0
0.5
1
1.5
2Unstable E.V, Ki = 30
TL0
ω0
λ2
λ5
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 16/34
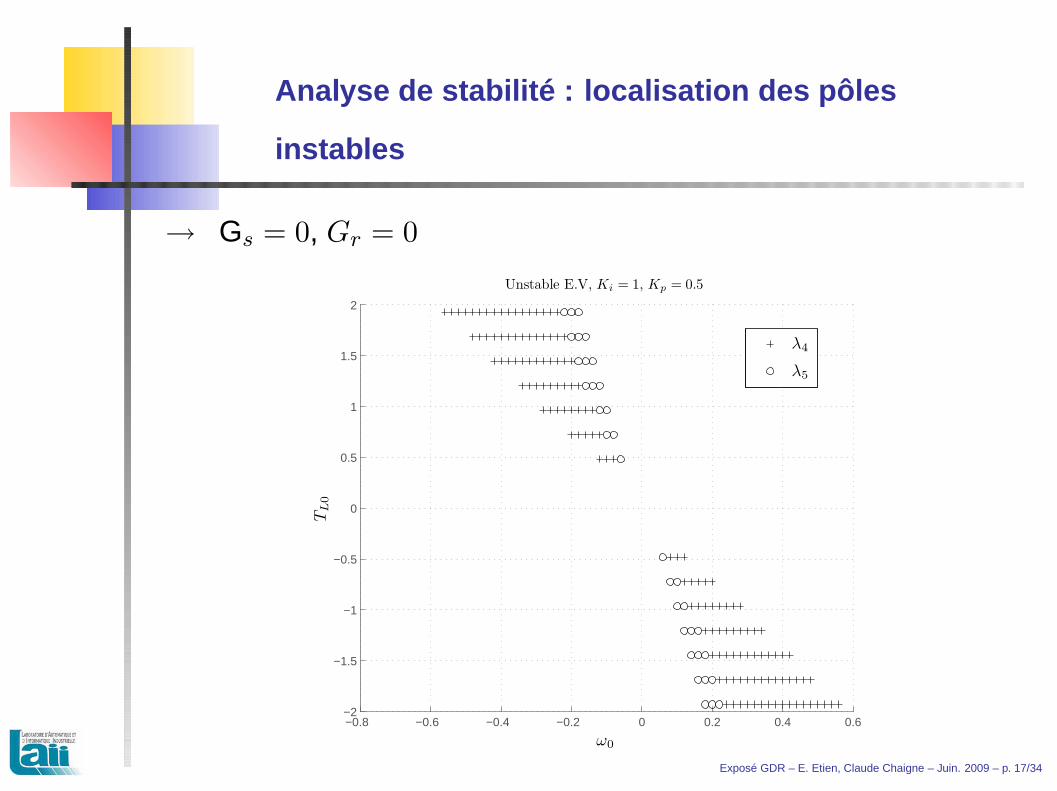
Analyse de stabilité : localisation des pôles
instables
→ Gs = 0, Gr = 0
−0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Unstable E.V, Ki = 1, Kp = 0.5
TL0
ω0
λ4
λ5
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 17/34
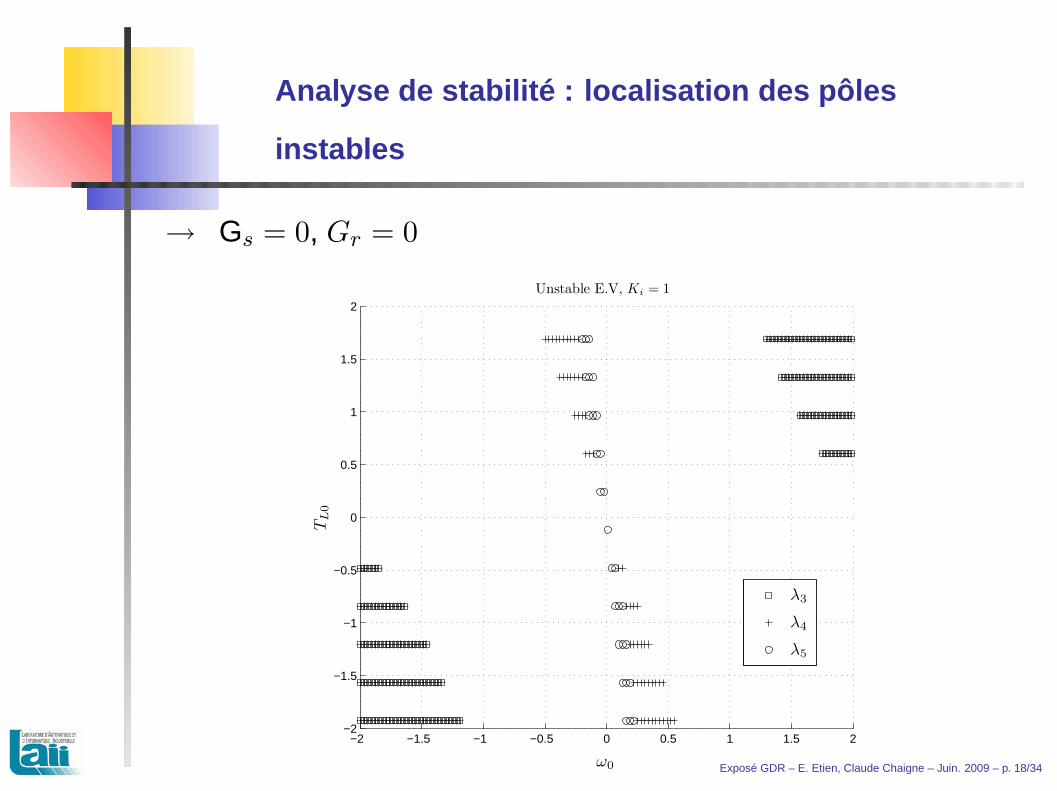
Analyse de stabilité : localisation des pôles
instables
→ Gs = 0, Gr = 0
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Unstable E.V, Ki = 1
TL0
ω0
λ3
λ4
λ5
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 18/34
Détermination d’une expression littérale des
régions d’instabilité dans le plan couple/vitesse
Propriété :
det(A1) =∏5i=1 λi
si det(A1) > 0 est positif → système instable.
La réciproque n’est pas vraie → plusieurs V.P peuvent
changer de signe pour le même point de fonctionnement.
Critère utilisable dans les quadrants générateurs.
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 19/34
Détermination d’une expression littérale des
régions d’instabilité dans le plan couple/vitesse
Exemple : Gs = 0, Gr = 0, Kp = 0, Ki 6= 0
det( bA1) = −Kiψ
2
ref
LML2σ
ωs0ˆLMRsωsl0 + RR(LM + Lσ)ωs0] = 0.
deux solutions:ωs0 = 0 (≡ droite d’inobservabilité)
ωs0 = ω0
1
1 +RRLσ
LMRs+RR
Rs
Dans le plan couple/vitesse
TL0= −P
ψ2
ref
RRω0 notée (D2).
TL0= −P
ψ2
ref
RR
“RRLσ
LMRs+RR
Rs
1 +RRLσ
LMRs+RR
Rs
”ω0 notée (D1).
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 20/34
Analyse de stabilité : localisation des pôles
instables
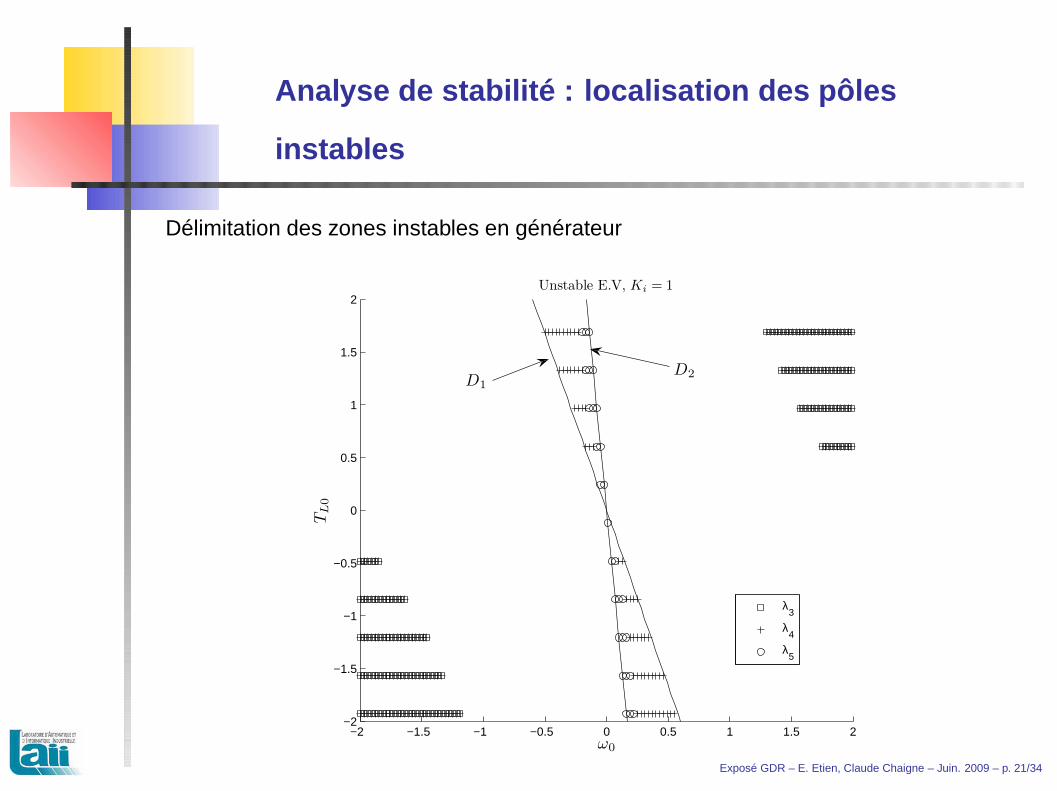
Délimitation des zones instables en générateur
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2Unstable E.V, Ki = 1
TL0
ω0
λ3
λ4
λ5
D2D1
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 21/34
Analyse de stabilité : localisation des pôles
instables
−0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4−1.5
−1
−0.5
0
0.5
1
1.5
TL0
ω0
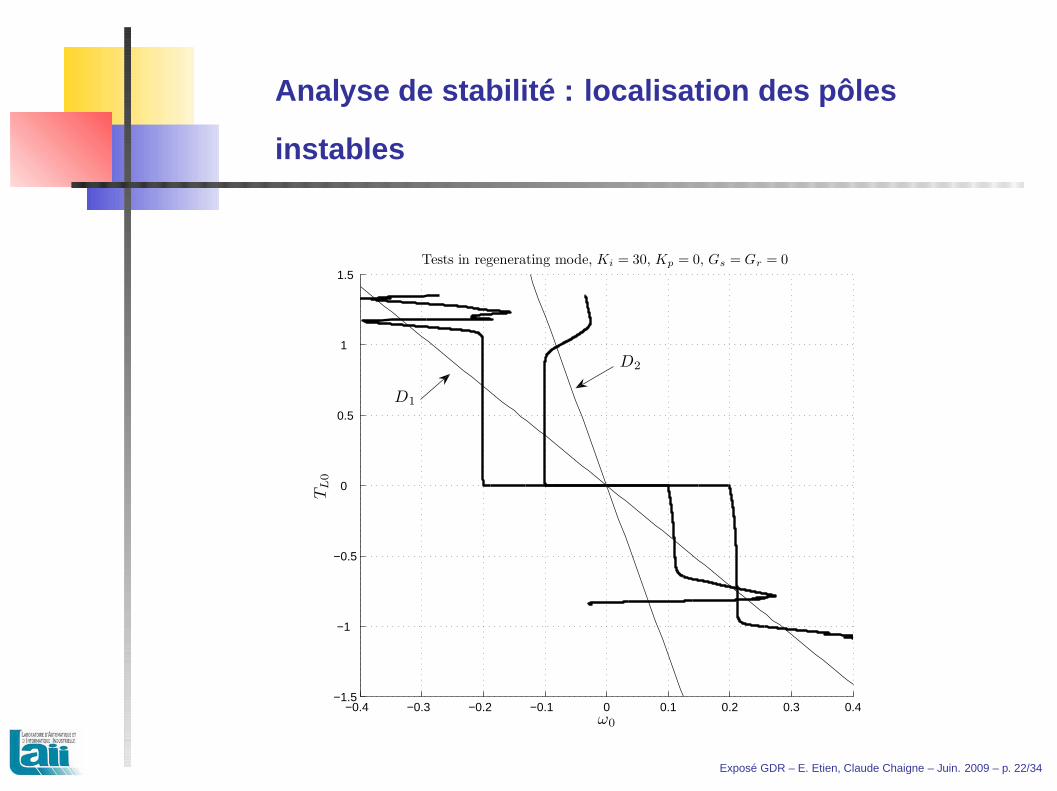
Tests in regenerating mode, Ki = 30, Kp = 0, Gs = Gr = 0
D2
D1
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 22/34
Réduction de la zone d’instabilité
Réduction = réduction de la zone instable à une droite
A flux constant (ψREF ), D2 d’équation ωs0 = 0 ne peut êtredéplacée
Réduction = alignement de (D1) sur (D2).
par action sur les gains d’observation Gs, Gr (kubota et al., 2001),(Suwankawin et al., 2002 et 2006), (Bensiali et al. 2006)
par action sur la loi d’adaptation (Tajima et al., 2002), (Rashed 2003),
par action sur la loi d’adaptation et les gains (Hinkkanne et al.,
2004).
Réduction → det(A1) = αω2
s0 = 0
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 23/34
Réduction de la zone d’instabilité : action sur les
gains d’observation
Exemple (Suwankawin et al. 2006) :
Gs =
24 gsd −gsq
gsq gsd
35 , Gr =
24 grd 0
0 grd
35 .
det( bA1) = Kωs0˘ωs0[LM (Rs +RR + gsdLσ) + RRLσ] −
ω0(LMRs + LMgsdLσ + LMgrd) +RRLσgsq¯
= 0.
choix possible :
8>><>>:
grd = −Rs,
gsd = kRR/LM ,
gsq = kω0, avec k > 0.
→ det( bA1) = Kω2
s0[LMRs + LMRR + (k + 1)RRLσ] = αω2
s0 = 0,
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 24/34
Réduction de la zone d’instabilité : action sur les
gains d’observation
Alternative indépendante de ω au voisinage de D2:
gsq = kω0 = k(ωs0 − ωsl0) ≈ −kωsl0,with k > 0.
avec : ωslo = RRisqo
ψrefet ψref = LM isdo
gsq = −kRR
LM
isqo
isdo
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 25/34
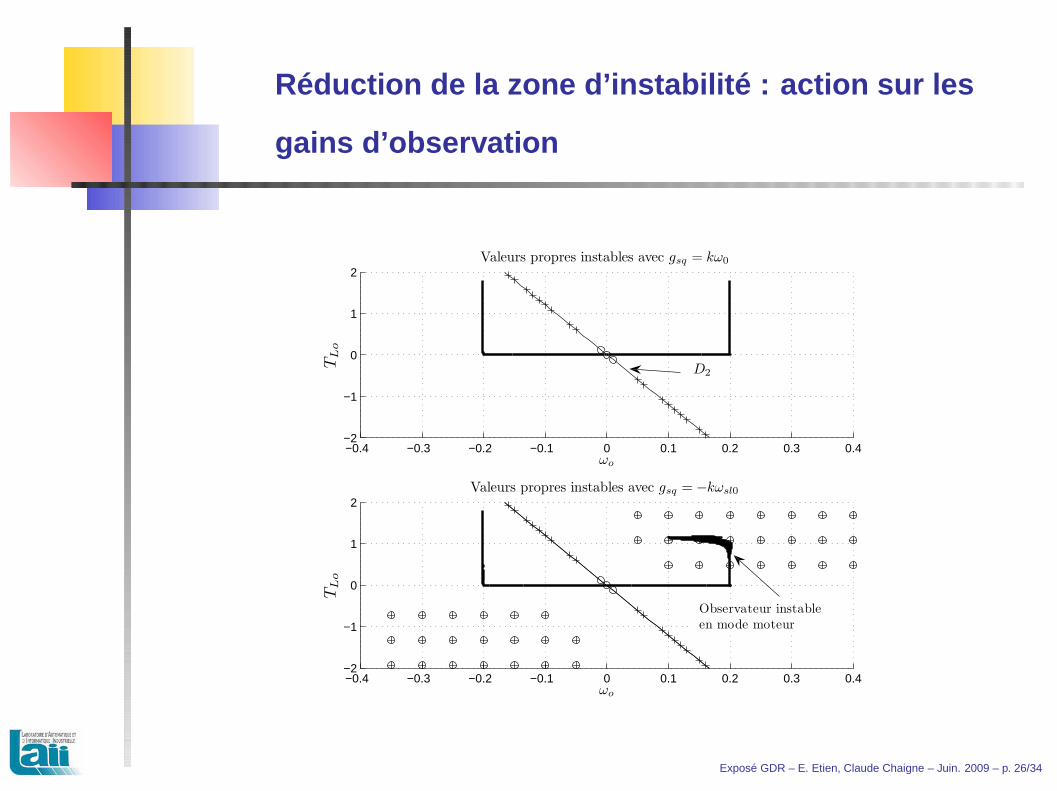
Réduction de la zone d’instabilité : action sur les
gains d’observation
−0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4−2
−1
0
1
2Valeurs propres instables avec gsq = −kωsl0
TL
o
ωo
−0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4−2
−1
0
1
2Valeurs propres instables avec gsq = kω0
TL
o
ωo
Observateur instableen mode moteur
D2
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 26/34
Réduction de la zone d’instabilité : action sur la
loi d’adaptation
PB: sensibilité aux variations de Rs
stratégie: réduction à D2 par action sur la loi d’adaptation,
robustesse par action sur Gr et Gs.
loi d’adaptation d’origine:d
dtω = −Kiǫ−Kp
d
dtǫ avec
ǫ = ℑ{eiψ∗
R} = ψref (cosφ.eiq − sinφ.eid)
loi d’adaptation modifiée: ǫ = ℑ{e−jφeiψ∗
R}
→ choix de φ
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 27/34
Réduction de la zone d’instabilité : action sur la
loi d’adaptation
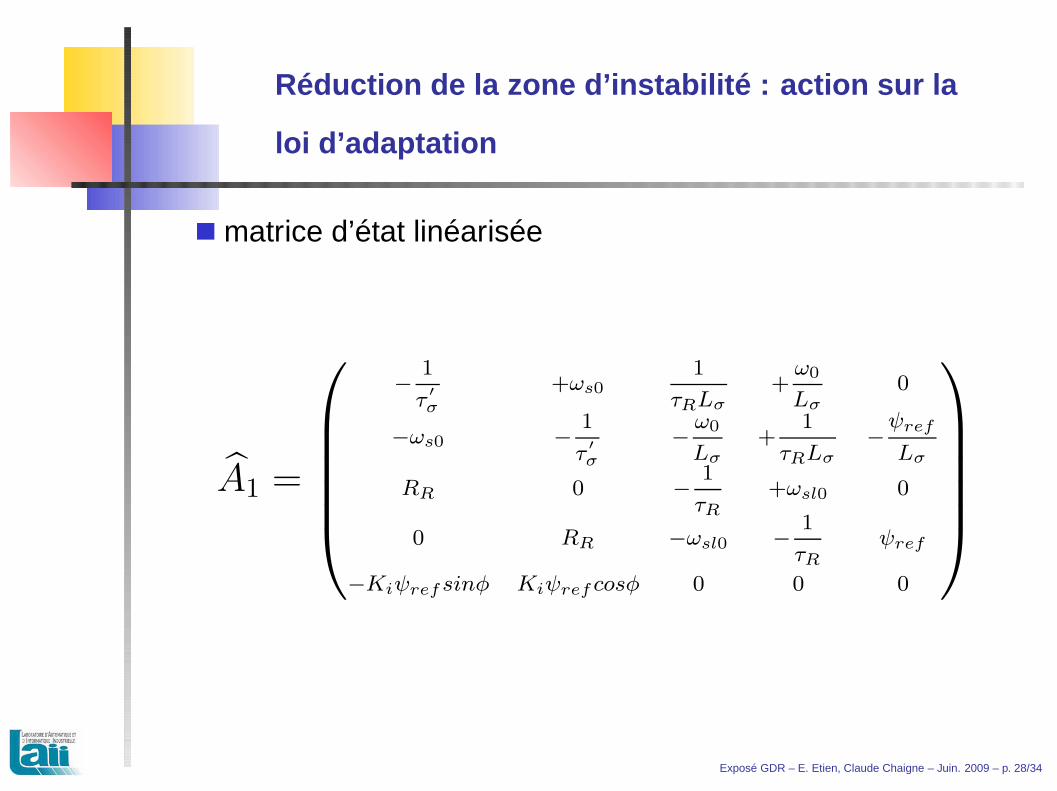
matrice d’état linéarisée
A1 =
−1
τ′
σ
+ωs01
τRLσ+ω0
Lσ0
−ωs0 −1
τ′
σ
−ω0
Lσ+
1
τRLσ−ψref
Lσ
RR 0 −1
τR+ωsl0 0
0 RR −ωsl0 −1
τRψref
−Kiψrefsinφ Kiψref cosφ 0 0 0
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 28/34
Réduction de la zone d’instabilité : action sur la
loi d’adaptation
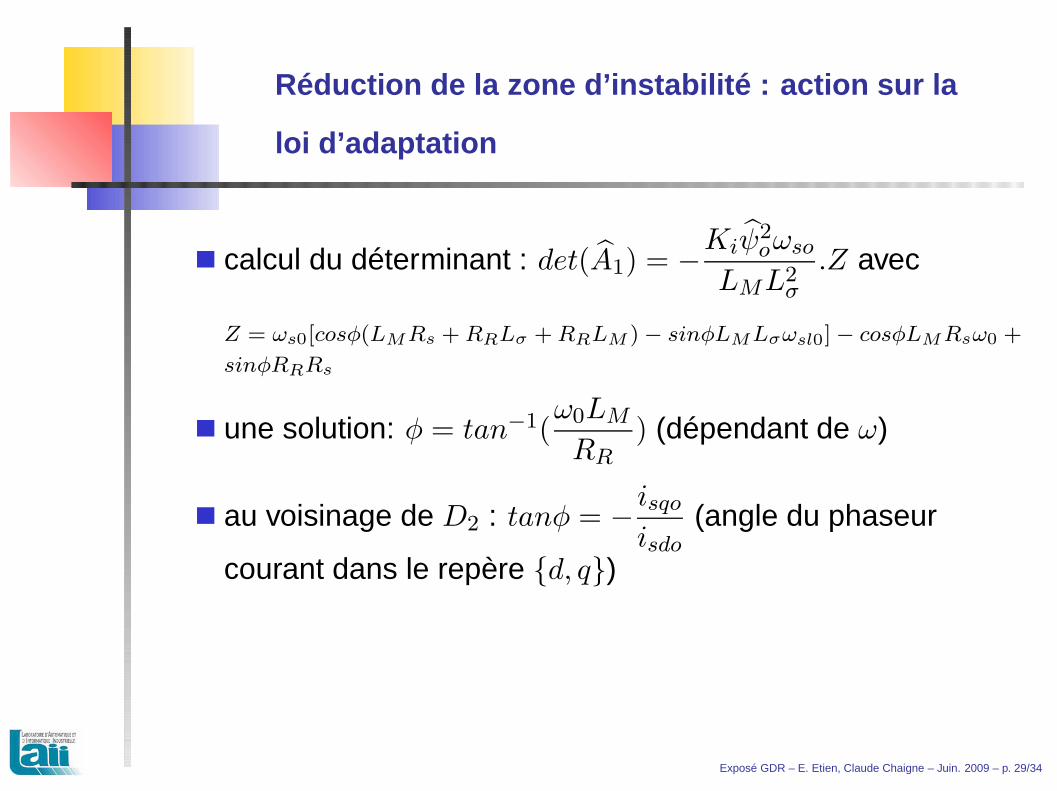
calcul du déterminant : det(A1) = −Kiψ
2oωso
LML2σ
.Z avec
Z = ωs0[cosφ(LMRs + RRLσ +RRLM ) − sinφLMLσωsl0] − cosφLMRsω0 +
sinφRRRs
une solution: φ = tan−1(ω0LM
RR) (dépendant de ω)
au voisinage de D2 : tanφ = −isqo
isdo(angle du phaseur
courant dans le repère {d, q})
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 29/34
Réduction de la zone d’instabilité : action sur la
loi d’adaptation
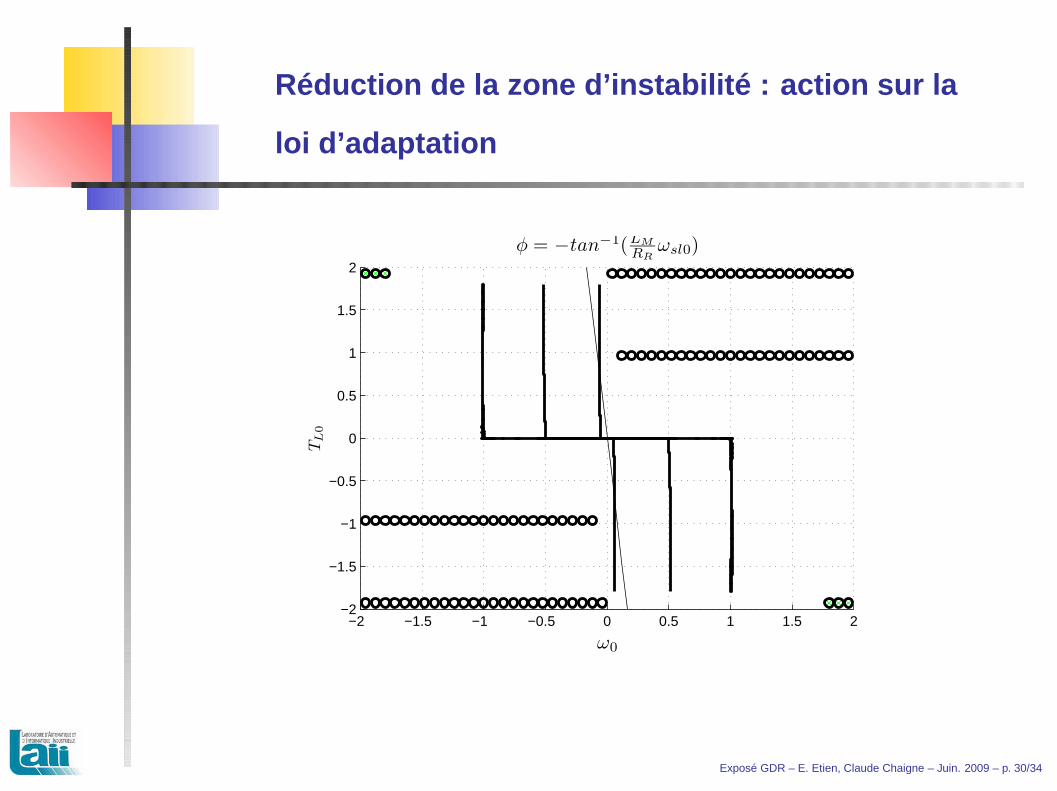
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
φ = −tan−1(LM
RRωsl0)
ω0
TL
0
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 30/34
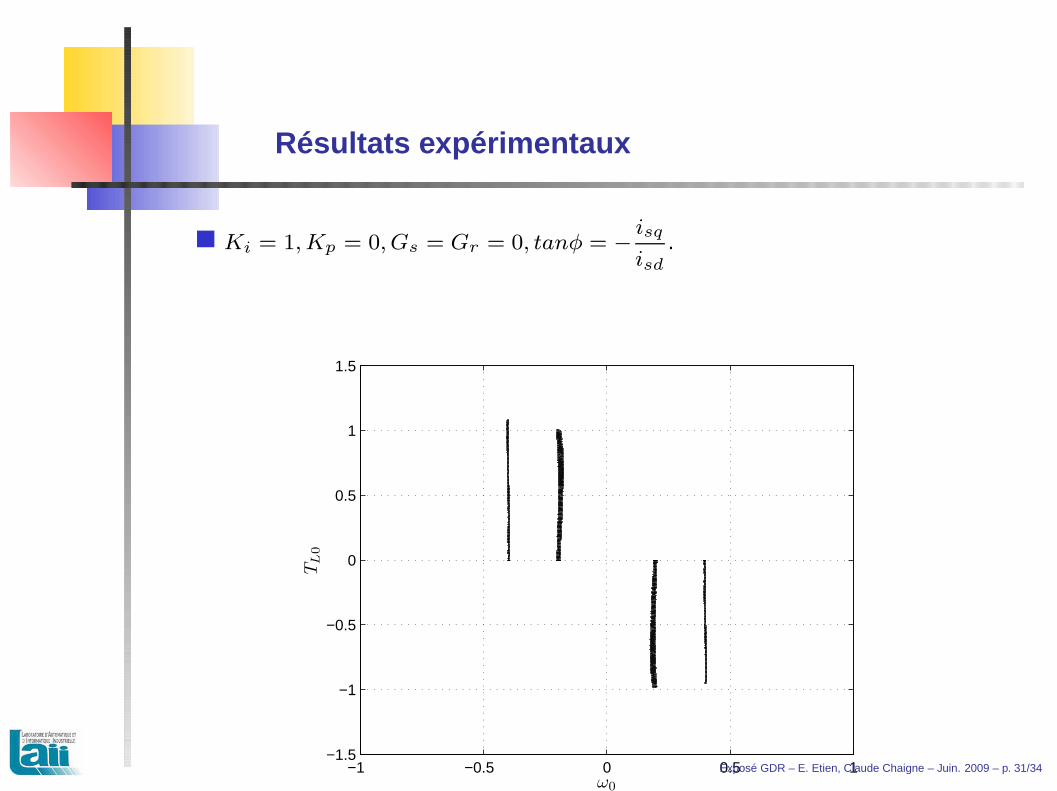
Résultats expérimentaux
Ki = 1,Kp = 0, Gs = Gr = 0, tanφ = −isq
isd.
−1 −0.5 0 0.5 1−1.5
−1
−0.5
0
0.5
1
1.5
ω0
TL
0
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 31/34
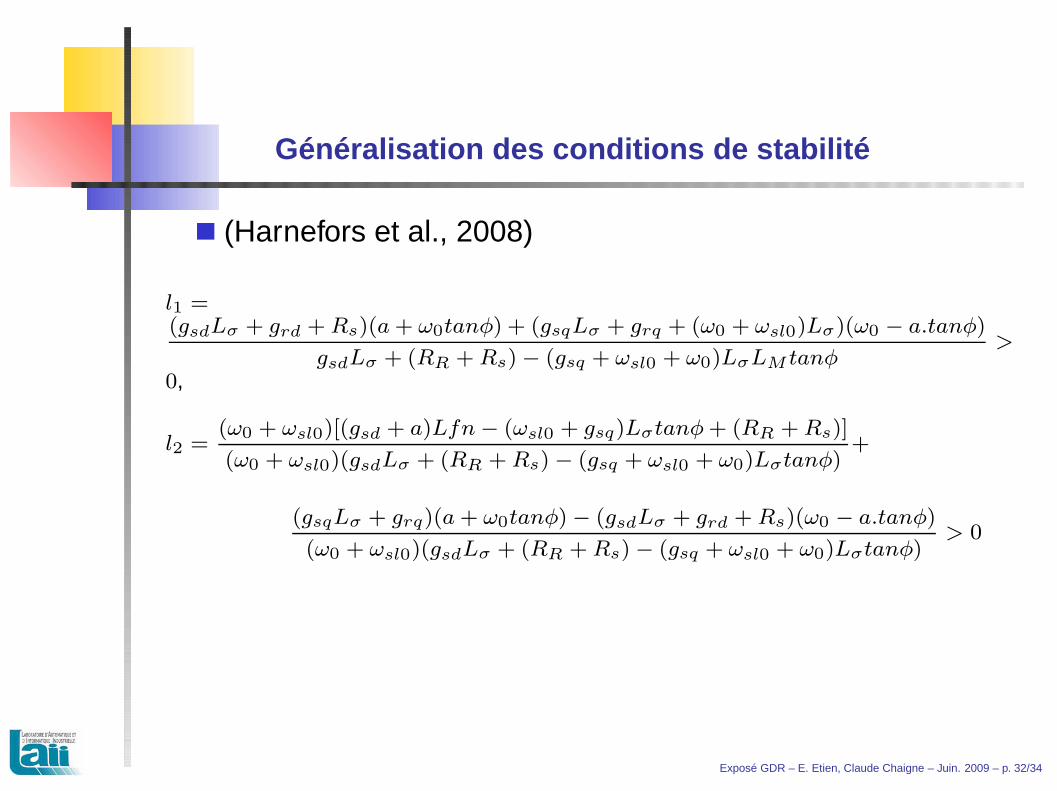
Généralisation des conditions de stabilité
(Harnefors et al., 2008)
l1 =(gsdLσ + grd +Rs)(a+ ω0tanφ) + (gsqLσ + grq + (ω0 + ωsl0)Lσ)(ω0 − a.tanφ)
gsdLσ + (RR + Rs) − (gsq + ωsl0 + ω0)LσLM tanφ>
0,
l2 =(ω0 + ωsl0)[(gsd + a)Lfn− (ωsl0 + gsq)Lσtanφ+ (RR +Rs)]
(ω0 + ωsl0)(gsdLσ + (RR +Rs) − (gsq + ωsl0 + ω0)Lσtanφ)+
(gsqLσ + grq)(a+ ω0tanφ) − (gsdLσ + grd + Rs)(ω0 − a.tanφ)
(ω0 + ωsl0)(gsdLσ + (RR +Rs) − (gsq + ωsl0 + ω0)Lσtanφ)> 0
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 32/34
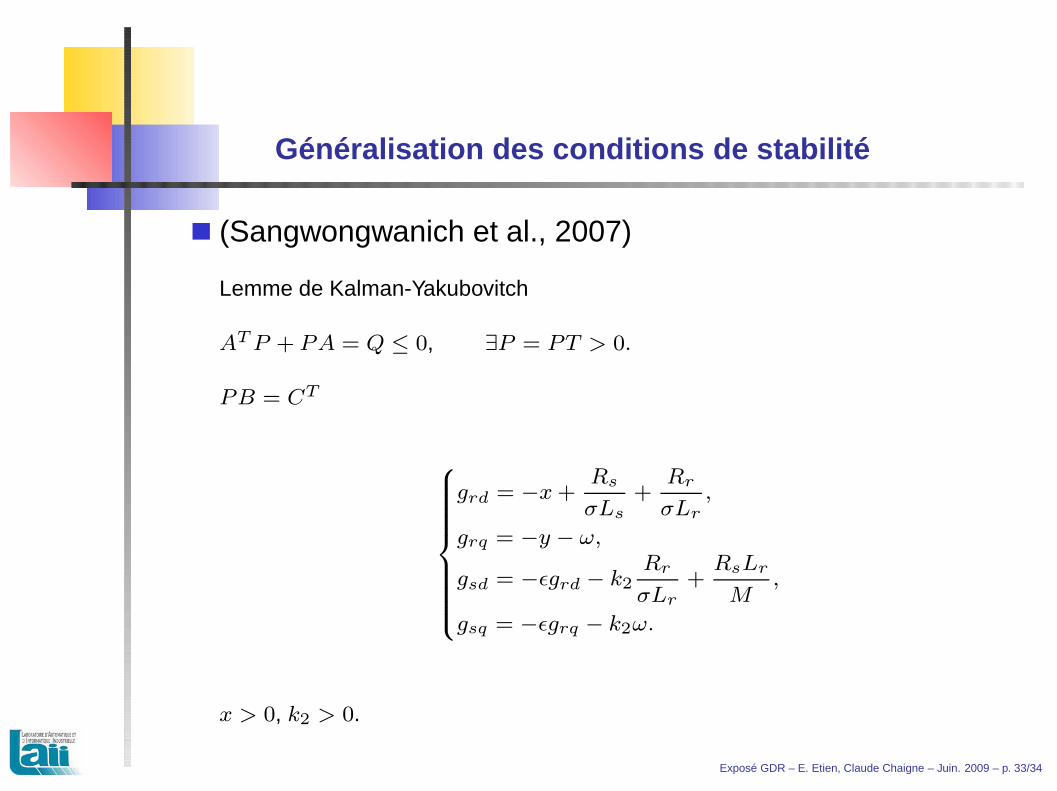
Généralisation des conditions de stabilité
(Sangwongwanich et al., 2007)
Lemme de Kalman-Yakubovitch
ATP + PA = Q ≤ 0, ∃P = PT > 0.
PB = CT
8>>>>>>><>>>>>>>:
grd = −x+Rs
σLs+
Rr
σLr,
grq = −y − ω,
gsd = −ǫgrd − k2Rr
σLr+RsLr
M,
gsq = −ǫgrq − k2ω.
x > 0, k2 > 0.
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 33/34
Fin
Exposé GDR – E. Etien, Claude Chaigne – Juin. 2009 – p. 34/34