Embed Size (px)
Citation preview

CONTROLO DE RESPOSTAS DINÂMICAS EM ESTRUTURAS ATRAVÉS DE TMD’S PENDULARES
CATARINA MENDES ALVES E SOUSA
Dissertação submetida para satisfação parcial dos requisitos do grau de
MESTRE EM ENGENHARIA CIVIL — ESPECIALIZAÇÃO EM ESTRUTURAS
Orientador: Professor Doutor Rui Manuel Meneses Carneiro de Barros
SETEMBRO DE 2013

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
2

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
3
MESTRADO INTEGRADO EM ENGENHARIA CIVIL 2012/2013
DEPARTAMENTO DE ENGENHARIA CIVIL
Tel. +351-22-508 1901
Fax +351-22-508 1446
Editado por
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Rua Dr. Roberto Frias
4200-465 PORTO
Portugal
Tel. +351-22-508 1400
Fax +351-22-508 1440
http://www.fe.up.pt
Reproduções parciais deste documento serão autorizadas na condição que seja
mencionado o Autor e feita referência a Mestrado Integrado em Engenharia Civil -
2012/2013 - Departamento de Engenharia Civil, Faculdade de Engenharia da Universidade
do Porto, Porto, Portugal, 2013.
As opiniões e informações incluídas neste documento representam unicamente o ponto de
vista do respetivo Autor, não podendo o Editor aceitar qualquer responsabilidade legal ou
outra em relação a erros ou omissões que possam existir.
Este documento foi produzido a partir de versão eletrónica fornecida pelo respetivo Autor.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
4

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
5
Aos meus pais

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
6

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
7
AGRADECIMENTOS
A realização deste trabalho, que para mim representa a oportunidade de aplicar o que aprendi
durante estes cinco anos de faculdade, representa também o término de um ciclo importante na
minha vida pessoal e académica. Sinto por isso que existem pessoas que estiveram presentes nesta
etapa da minha vida às quais quero expressar o meu sentimento de gratidão.
Não posso deixar de agradecer a todos os professores que durante estes cincos anos, dedicaram
grande parte do seu tempo, a transmitir com o maior esforço, paciência e boa vontade os seus
conhecimentos, abdicando muitas vezes até de tempo pessoal para estarem de gabinete aberto a
todas as nossas dúvidas.
Tenho no entanto que expressar especial agradecimento, ao meu Orientador, Professor Rui Carneiro
Barros, pela sua constante disponibilidade em ajudar, orientar, disponibilizar bibliografia e corrigir os
meus erros. Sem os seus valiosos conselhos e orientação a conclusão deste trabalho não teria sido
possível.
Agradeço muito também ao Jorge Henriques e ao Fábio por me terem ajudado de forma fulcral na
reta final deste trabalho.
Aos meus amigos, aqueles que guardo desde o inicio da minha adolescência na Madeira, um
obrigado por todos os momentos de alegria e todas as memorias que me ajudaram a formar como
pessoa, aos meus amigos que conheci nesta etapa da minha vida, sem eles a minha vida académica
não teria sido recheada de alegrias, gargalhadas, muito otimismo e principalmente de muita
interajuda como foi.
Aos meus pais, que são o meu porto seguro, o meu exemplo de perseverança, de otimismo e de
caracter, o meu muito obrigado, pelo apoio incondicional, pelo amor constante e pela oportunidade de
tirar este curso.
E por fim à minha irmã Filipa por ser minha amiga incondicional desde que nasceu, um obrigada por
tudo e por me ter acompanhado também aqui no Porto nesta etapa da minha vida, sempre com um
sorriso e com uma leveza própria de quem está sempre muito segura e otimista no presente e no
futuro, transmitindo-me segurança para ultrapassar os obstáculos típicos da vida académica

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
8

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
9
RESUMO
Com o avanço constante das tecnologias é possível construir, nos dias que correm, estruturas cada
vez mais altas, mais flexíveis e poupar recursos, tais como materiais construtivos. Estes avanços
implicam em inúmeros casos, um controlo estrutural acrescido, nestes casos os TMD’s podem ser de
grande utilidade, pois podem diminuir significativamente a resposta dinâmica e garantir a segurança
estrutural e o bom funcionamento destas estruturas.
O presente trabalho tem como objetivo o estudo do efeito da colocação de TMD’s, em particular os
TMD’s em forma de pêndulo, em diferentes estruturas da engenharia civil. Tem também como
objetivo analisar os fatores de que depende uma eficiente colocação e sintonização de um TMD
pendular, tendo em conta a estrutura alvo e as ações dinâmicas a que esta se encontra sujeita.
Inicialmente o trabalho começa por resumir algumas técnicas de controlo estrutural existentes, a sua
aplicabilidade, e referem-se também algumas situações reais da aplicação de TMD’s em forma de
pêndulo.
Em primeiro lugar são estudadas as equações que regem o movimento de um pêndulo, de seguida é
construído um exemplo simples de dois graus de liberdade, sendo estes: o movimento numa só
direção da estrutura e o ângulo do pêndulo em relação à horizontal que passa no seu ponto de
fixação à estrutura. A partir deste exemplo é então feita uma análise com cálculos analíticos e outra
com recurso a um software de elementos finitos SAP2000. Este modelo simples é construído no
sentido de confrontar resultados e testar a fiabilidade dos resultados obtidos pelo software.
É também estudada a possibilidade de um modelo mais complexo, de uma parede treliçada, de
grandes dimensões, projetada para servir de apoio a ensaios a outras estruturas, beneficiar da
colocação de um TMD pendular, neste cálculo é tida em conta a ação do vento, segundo o
Eurocódigo 1 quando esta estrutura não está a ser utilizada para nenhum ensaio. Modelando
computacionalmente a parede treliçada pode-se comparar os valores da sua resposta estrutural à
ação dinâmica do vento no caso de não ter nenhum tipo de controlo estrutural adicional, com os
valores da resposta à mesma ação mas recorrendo ao uso de TMD’s pendulares, podendo avaliar
assim o benefício da utilização destes dispositivos para controlo estrutural.
Para finalizar são estudados os resultados das várias simulações feitas, e analisadas as situações em
que os TMD’s pendulares se mostram eficazes.
Palavras-Chave: TMD’s, Pêndulo,Vento, Controlo de Vibrações.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
10

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
11
ABSTRACT
With the current technology advances, nowadays it is possible to construct higher and more flexible
structures and save resources such as construction materials. These advances often require an
increased structural control, for which TMD's can prove very useful, since they can lead to a significant
reduction in the dynamic response and guarantee structural safety and good operation of these
structures.
This work aims to study the influence of using TMD's, in particular TMD's in pendulum layout, in
different civil engineering structures. Another goal is to evaluate which factors are relevant for an
efficient placement and synchronization of a pendulum TMD, taking into account the particular
structure involved and the dynamic actions it is subjected to.
Initially the work will summarize presently available techniques for structural control, its applicability
and characteristics, and will also refer real situations where pendulum TMD's have been used.
The theory behind the movements of a pendulum is stated, followed by the construction of a simple
example with two degrees of freedom, unidirectional movement of the structure and the pendulum
angle in relation to horizontal, including analytical evaluation and numerical modelling using the finite
elements software SAP2000. This simple model is built to validate results and test the reliability of the
numerical modelling.
An additional study with a more complex model was also studied, comprising a loading tower of a
transmission tower testing station to benefit from the placement of a pendulum TMD, in this case
accounting for the wind action, according to Eurocode 1. The numerical modelling to the loading tower
allows a comparison between the values of structural responses to dynamics related to the wind force,
without these control devices, with the values of the responses to the same action but with pendulum
TMD incorporated, and in this way to evaluate the efficiency of assuming the application of those
devices for structural control.
Finally, the results of different simulations are discussed in order to conclude if the application of
pendulum TMD's is worthwhile in civil engineering structures.
KEYWORDS: TMD's, Pendulum, Wind, Vibration Control.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
12

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
13
ÍNDICE GERAL
1 INTRODUÇÃO .................................................................................. 19
1.1. ASPETOS GERAIS ........................................................................................................... 19
1.2. SÍNTESE DE OBJETIVOS ................................................................................................... 20
1.3. ESTRUTURA DO TRABALHO ............................................................................................. 20
2 SISTEMAS DE CONTROLO DE VIBRAÇÕES - ESTADO DA ARTE 23
2.1. INTRODUÇÃO .................................................................................................................. 23
2.2. SISTEMAS DE CONTROLO ATIVO ............................................................................. 23
2.3. SISTEMAS DE CONTROLO SEMI-ATIVO.................................................................... 24
2.4. SISTEMAS DE CONTROLO HÍBRIDO ......................................................................... 24
2.5. SISTEMAS DE CONTROLO PASSIVO ........................................................................ 25
2.5.1. ISOLAMENTO DE BASE ............................................................................................................. 25
2.5.2. AMORTECEDORES DE MASSA SINTONIZADA TUNED MASS DAMPERS (TMD) ................. 26
2.5.2.1. AMORTECEDORES DE MASSA SINTOZINADA PENDULARES PENDULUM TUNED MASS
DAMPERS (PTMD) ............................................................................................................................... 28
3 FUNDAMENTOS TEÓRICOS E FORMULAÇÃO MATEMÁTICA ...... 29
3.1. INTRODUÇÃO .................................................................................................................. 29
3.2. FATOR DE AMPLIFICAÇÃO DINÂMICA E A SUA REDUÇÃO POR MEIO DE UM
AMORTECEDR DE MASSA SINTONIZADA ....................................................................... 29
3.2.1. EM ESTRUTURAS SEM AMORTECIMENTO ............................................................................ 29
3.2.2. EM ESTRUTURAS COM AMORTECIMENTO ............................................................................ 32
3.3. ANÁLISE ESTRUTURAL DE SISTEMAS DE UM GRAU EQUIVALENTE .............................. 36
3.4. FORMULAÇÃO MATEMÁTICA DO MOVIMENTO DE UM PÊNDULO ................................... 37
3.5. FORMULAÇÃO DAS EQUAÇÕES DE MOVIMENTO DE UM SISTEMA DE UM GRAU DE
LIBERDADE COM UM PÊNDULO ACOPLADO SUBMETIDO A UMA AÇÃO HARMÓNICA. ......... 40
3.6. FORMULAÇÃO DAS EQUAÇÕES DE MOVIMENTO DE UM SISTEMA DE UM GRAU DE
LIBERDADE COM UM PÊNDULO ACOPLADO SUBMETIDO A UMA EXCITAÇÃO NA BASE ....... 43
4 APLICAÇÃO A CASOS PRÁTICOS SIMPLES ................................................ 45
4.1. APLICAÇÃO DE UM TMD PENDULAR A UM PÓRTICO DE UM PISO E UM VÃO. ......................... 45
4.2. VARIAÇÃO DOS DIFERENTES PARAMETROS DO TMD PENDULAR APLICADO NO PÓRTICO
DE UM PISO E UM VÃO ............................................................................................................ 54
4.3. PÓRTICO MULTIPISO DE UM VÃO ...................................................................................... 58

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
14
5 ESTUDO DO CONTROLE DE VIBRAÇÕES COM TMD PENDULAR NUMA
ESTRUTURA REAL .................................................................................... 67
5.1. DESCRIÇÃO E MODELAÇÃO COMPUTACIONAL DA PAREDE DE REAÇÃO DA PLATAFORMA DE
ENSAIOS DA METALOGALVA ................................................................................................... 67
5.2. AÇÕES E RESPOSTAS DINÂMICAS DA PAREDE DEVIDAS AO VENTO ..................................... 70
5.3. DIMENSIONAMENTO DO TMD PENDULAR ............................................................................ 74
5.4. DISCUSSÃO DE RESULTADOS ........................................................................................... 76
6 CONCLUSÃO ........................................................................................ 77
6.1. CONSIDERAÇÕES FINAIS ................................................................................................. 77
6.2. PROPOSTAS DE DESENVOLVIMENTOS FUTUROS ................................................................ 78

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
15
Índice de Figuras
Fig 2.1 Esquema ilustrativo do funcionamento de um sistema de controlo ativo [1] ............................ 24
Fig. 2.2- Esquema ilustrativo de um dispositivo isolador de base ........................................................ 26
Fig. 2.3- Esquema ilustrativo do aparelho supressor de vibrações de Frahm ...................................... 27
Fig. 2.4- TMD pendular do edifício Taipei, localizado em Taiwan ........................................................ 28
Fig. 3.1– Fator de amplificação dinâmica fixando os valores de α=1 e µ=0,05 .................................... 30
Fig. 3.2 Fator de amplificação dinâmica fixando os valores de α=0.08 e µ=0,05 ................................ 32
Fig. 3.3 Curvas de amplificação máxima do deslocamento do sistema principal ................................ 34
Fig. 3.4 -Curvas para determinação do valor ótimo de .................................................................... 34
Fig. 3.5 Curvas para determinação do valor ótimo de ξαopt ................................................................... 35
Fig. 3.6- Fator de amplificação dinâmica fixando os valores de ζs=0,01 e µ=0,01 .............................. 35
Fig. 3.8 – Esquema de sistema de um grau de liberdade com um pêndulo acoplado submetido a uma
força harmónica Fa(t) ............................................................................................................................ 40
Fig. 4.2- Pórtico simples com TMD pendular acoplado sujeito a ação horizontal harmónica F(t) ........ 46
Fig. 4.3- Extração dos modos de vibração no programa SAP2000 ...................................................... 47
Fig. 4.4-Deslocamentos do nó 2 ao longo do tempo obtidos no software SAP2000 ............................ 48
Fig. 4.5-Acelerações do nó 2 ao longo do tempo obtidos no software SAP2000 ................................. 49
Fig. 4.7 – Deslocamentos da estrutura com pêndulo (nó 2) no software SAP2000 ............................. 51
Fig. 4.8 – Acelerações ao longo do tempo da estrutura com pêndulo (nó 2) no software SAP200 ..... 51
Fig. 4.9-Portico com pêndulo alterado definido no software SAP2000................................................. 52
Fig. 4.10-Primeiro modo de vibração do pórtico com pêndulo alterado no software SAP2000 ........... 53
Fig. 4.11 – Deslocamentos ao longo do tempo (nó 2) no software SAP2000 ...................................... 53
Fig. 4.12 – Acelerações ao longo do tempo (nó 2) no software SAP2000 ........................................... 54
Fig-4.13- Deslocamentos ao longo do tempo dos cinco casos de estudo ........................................... 55
Fig 4.15 Aproximação da função de sin(x) à função de x ..................................................................... 57
Fig 4.16 - Aproximação da função de cos(x) à função de ...................................................... 57
Fig 4.18 – Deformada dos primeiros 4 modos de vibração .................................................................. 59
Fig. 5.1- Bancos de ensaios de Nagpur ................................................................................................ 67
Fig. 5.2- Imagem, retirada do software Autodesk Robot Structural Analysis, da parede de reação
secundária. ............................................................................................................................................ 68
Fig. 5.3- Modelo bidimensional da parede de reação secundária ........................................................ 69
Fig. 5.4- Modelo bidimensional da parede de reação secundária ........................................................ 69
Fig. 5.5- Forças instantâneas geradas na serie 1 gerada para o 2 nível.............................................. 72
Fig. 5.6- Forças instantâneas geradas na serie 1 para cada nível de altura ........................................ 73

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
16
Fig 5.7- Deslocamentos ao longo do tempo do ponto mais alto da parede .......................................... 73
Fig 5.8- Acelerações ao longo do tempo do ponto mais alto da parede ............................................... 74
Fig 5.10- Acelerações ao longo do tempo do ponto mais alto da parede com aplicação do TMD ....... 75
Índice de Quadros
Quadro 4.1- Casos de estudo ............................................................................................................... 55
Quadro 4.2 -Casos de estudos e respetivos resultados ....................................................................... 55

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
17
SÍMBOLOS E ABREVIATURAS
TMDs - Amortecedores de massa sintonizada
TMD - Amortecedor de massa sintonizada
TLDs - Amortecedores de líquido sintonizado
β- razão entre a frequência de excitação e a frequência natural da estrutura principal
α- razão entre a frequência natural do TMD e a frequência natural da estrutura principal
wa- frequência natural do TMD
ws-frequência natural da estrutura principal
- coeficiente de amortecimento do TMD
µ- razão entre a massa do sistema adicional e a massa do sistema principal
αopt- razão ótima entre a frequência natural do TMD e a frequência natural da estrutura principal
R- fator de amplificação dinâmica
opt- coeficiente ótimo de amortecimento do TMD
- Coeficiente de amortecimento da estrutura principal
T- energia cinética
U- Energia potencial total
-energia potencial gravítica
-energia potencial elástica
L- Equação de movimento do pêndulo
Km – rididez de rotação da mola
l – comprimento do pêndulo
y- altura que sobe o pendulo medida na vertical
θ- rotação da barra do pendulo em relação à vertical correspondente ao pêndulo imobilizado
θ -velocidade angular da barra do pêndulo
GT-energia cinética do sistema formado pelo pêndulo
pC- Coeficiente de amortecimento do pêndulo
D - Energia dissipativa
0P-Amplitude da força aplicada
z – desenvolvimento em altura
v – velocidade de vento
vm – velocidade média

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
18
σv – desvio padrão da turbulência
vb,0 – valor básico da velocidade de referência
vb – velocidade de referência
cdir – coeficiente de direção
cseason – coeficiente de sazão
cr – coeficiente de rugosidade
co – coeficiente do orografia
z0 – comprimento de rugosidade
kr – coeficiente de terreno
Iv – intensidade de turbulência na direção de propagação do vento

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
19
1
INTRODUÇÃO
1.1. ASPETOS GERAIS
Durante o período de vida útil de uma estrutura, esta é solicitada por diversos tipos de ações, as
ações estáticas, como o peso próprio ou outras cargas permanentes e sobrecargas, e as ações
dinâmicas como o vento, sismos e outras solicitações variáveis no tempo. São estas últimas as ações
que provocam deslocamentos horizontais e fadiga nas estruturas, tornando assim relevante a análise
das mesmas em termos de resposta (deslocamentos e acelerações) da estrutura e
consequentemente a redução e controlo destes mesmos deslocamentos.
O interesse de controlar as respostas dinâmicas em estruturas de engenharia civil é verificado em
várias vertentes, desde a reabilitação de edifícios existentes, tornando-os aptos a novos níveis de
exigência em estado de serviço sob a ação do vento, a garantia de não colapso de estruturas
fundamentais no funcionamento de uma cidade na ocorrência de sismos de grande intensidade, até à
economia de materiais na construção das estruturas garantindo a estabilidade das mesmas através
de sistemas com dispositivos não incluídos na estrutura original.
Este controlo pode ser materializado de várias formas, designadamente atuando sobre as
características próprias da estrutura, alterando a sua frequência própria ou rigidez, embora esta
alteração seja muitas vezes difícil de concretizar devido a restrições arquitetónicas e de material.
Outra forma de controlo, esta mais viável e de utilização corrente, consiste na introdução de
aparelhos próprios que formam sistemas de controlo externo, existindo dois tipos principais de
sistemas, os sistemas de controlo passivo e os sistemas de controlo ativo. Outras variantes destes
são os sistemas semi-ativos e os sistemas híbridos.
As técnicas passivas de controlo utilizam dispositivos que não necessitam de fontes de energia
exteriores para funcionarem. Exemplos correntes destes sistemas passivos são os isoladores de
base, amortecedores de massa sintonizada também conhecidos como tuned mass dampers (TMD)
ou amortecedores de líquido sintonizado tuned liquid dampers (TLD).
Os isoladores de base estão direcionados apenas para o controlo de respostas dinâmicas em caso
de ocorrência de sismo, e o princípio de funcionamento destes isoladores baseia-se no aumento da
frequência da estrutura, através da introdução de blocos de grande rigidez vertical e reduzida rigidez
horizontal nas ligações da estrutura às fundações.
No caso dos TMD’s é utilizada tipicamente uma massa que pode ser um bloco de betão ou até
mesmo um depósito de água, sendo esta massa secundária ligada à estrutura principal através de
molas e pequenos amortecedores adicionais que conferem ao sistema total a capacidade dissipativa
necessária para que a estrutura tenha uma resposta satisfatória quando submetida a ações
dinâmicas.
Os TLD’s são um caso particular dos TMD’s nos quais o líquido é utilizado de modo a conferir todas
as características necessárias à estrutura secundária, tais como massa e capacidade de
amortecimento através de ações de amortecimento viscoso.
O amortecimento ativo visa impor forças ou deslocamentos, em pontos estratégicos da estrutura de
acordo com medições efetuadas em tempo real ou de acordo com um histórico de medições. Este
sistema requer um sistema de sensores, processamento de sinais, estratégia de controlo e um
sistema que acione respostas em tempo real, ou seja uma importante fonte de energia externa[2]

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
20
Os sistemas semi-ativos combinam as principais vantagens dos sistemas ativos e passivos, necessitam
de menor quantidade de energia exterior, podendo até funcionar com recurso a pilhas e a baterias, o que
os torna muito eficazes em caso de falhas gerais de distribuição de energia.
Os sistemas híbridos consistem na maioria dos casos no funcionamento simultâneo dos sistemas
passivos e ativos.
Este trabalho debruça-se essencialmente no funcionamento dos TMD’s, e em particular no caso dos
TMD’s pendulares, em que o TMD se materializa numa massa (normalmente esférica) presa à
extremidade de um fio, formando um pêndulo, fixo à estrutura.
A característica principal do pêndulo é a sua frequência de oscilação que depende inteiramente do
comprimento do fio (quando a massa do fio é desprezável e não existe rigidez rotacional), o que requer
muitas vezes comprimentos de fio excessivamente grandes. Quando não é possível implementar o
comprimento que conduziria a uma sintonização perfeita, é possível obter resultados positivos para
certos casos, ainda que o pêndulo não esteja a funcionar na sua máxima eficiência, como é
demonstrado mais adiante neste trabalho.
1.2. SÍNTESE DE OBJETIVOS
O principal objetivo do presente trabalho é analisar a eficiência da utilização de TMD’s pendulares na
atenuação de respostas dinâmicas em estruturas de engenharia civil e estudar os critérios envolvidos no
dimensionamento deste tipo de dispositivos.
Para o estudo da eficiência dos TMD’s pendulares, é necessário averiguar o tipo e a escala de valores
de vibrações, a que uma estrutura real pode estar sujeita, para saber até que ponto estas mesmas
vibrações são atenuadas e se se justifica ou não a utilização deste tipo de dispositivos.
1.3. ESTRUTURA DO TRABALHO
Após uma breve introdução sobre o controlo estrutural, descrevendo os vários tipos de controlo em
particular o controlo passivo, e descrevendo o interesse prático de utilizar mecanismos adicionais que
reduzem a resposta dinâmica estrutural, procede-se ao estudo por capítulos dos diferentes temas
propostos para o presente trabalho.
Esta dissertação está dividida em 6 capítulos, o segundo capítulo descreve os vários tipos de controlo de
vibrações existentes, os ativos, os semi-ativos, os híbridos e os passivos; dentro da temática do controlo
passivo são abordadas algumas aplicações de TMD pendulares em estruturas reais.
No terceiro capítulo são expostos os fundamentos teóricos e a formulação matemática inerente à
redução do fator de amplificação dinâmica e consequentemente da resposta dinâmica por meio da
utilização de amortecedores de massa sintonizada (tuned mass damper TMD), quer em estruturas não
amortecidas, quer em estruturas amortecidas e é demonstrado como se obtêm os valores ótimos para
esses mesmos TMD’s. É também descrita a formulação matemática associada ao movimento de um
pêndulo quando este se encontra isolado e quando este está acoplado a uma outra estrutura que
também está em movimento segundo uma só direção.
No quarto capítulo são construídos casos simples de pórticos, com um ou vários pisos, de apenas um
vão, em que se aplicam cargas harmónicas idealizadas, com o propósito de demonstrar a aplicabilidade
deste tipo de TMD e de discutir a variação de alguns parâmetros deste TMD. É estudada também a
eficiência da utilização de mais do que um TMD pendular em simultâneo.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
21
No quinto capítulo são aplicados os procedimentos estudados para o dimensionamento de um
TMD numa estrutura real. Trata-se de uma parede de reação de um banco de ensaios na trofa que
está a ser projetada no âmbito do VHSSPOLES. A parede é estudada a duas dimensões e
analisada numa só direção; são dimensionadas as ações do vento, segundo a geometria da
parede de reação e a sua localização geográfica, e são calculadas respostas dinâmicas desta
parede sem TMD pendular e com TMD pendular.
Por fim, no sexto capítulo, são apresentadas as principais conclusões e faz-se uma sugestão para
futuros desenvolvimentos dos diferentes temas abordados ao longo deste trabalho.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
22

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
23
2
SISTEMAS DE CONTROLO DE
VIBRAÇÕES - ESTADO DA ARTE
2.1. INTRODUÇÃO
O controlo estrutural tem ganho, nos últimos anos, uma maior projeção e tem sido alvo de
inúmeros estudos, devido em grande parte à necessidade crescente do seu uso. As inovações
tecnológicas permitem construir edifícios cada vez mais altos, estruturas cada vez mais flexíveis e
permitem também poupar em materiais apesar de exigirem também em muitos casos um controlo
adicional das vibrações e dos deslocamentos. O controlo adicional visa não só para garantir o não-
colapso, mas também garantir que se cumprem os valores estipulados nas normas para os
deslocamentos máximos em serviço e que, no caso de estruturas habitáveis, o conforto humano e
a sensação de segurança sejam assegurados.
O controlo estrutural, que se pode materializar quer por dispositivos externos, quer por meio de
ações de forças externas, atua alterando algumas propriedades da estrutura, nomeadamente a
sua rigidez e amortecimento. O controlo pode ser classificado em passivo, ativo, semi-ativo e
hibrido
2.2. SISTEMAS DE CONTROLO ATIVO
O controlo ativo é essencialmente um sistema que aplica forças à estrutura através de dispositivos
que são alimentados por fontes externas. O valor dessas mesmas forças é calculado a cada
instante, baseado nos valores da resposta recolhidos pelos sensores e calculado
matematicamente em tempo real por um computador que utiliza algoritmos de controlo ativo que
visam reduzir os deslocamentos e fazer com que a resposta da estrutura siga uma determinada lei
ou trajetória.
A grande vantagem deste sistema de controlo é não possuir as limitações do controlo passivo, que
apenas permite a sintonização exclusiva de cada TMD a uma só frequência. Este sistema adapta-
se em tempo real às características da ação dinâmica e da própria estrutura. Apresenta no entanto
a fragilidade de necessitar de energia externa em quantidades significativas, o que durante um
evento como o caso de um sismo de grande intensidade, nem sempre é garantido. Considera-se,
por isso, muitas vezes a utilização de dispositivos dissipadores de energia em simultâneo com o
sistema de controlo ativo. [3]
A figura 2.3 serve para esquematizar o funcionamento dos sistemas de controlo ativo, Tal como já
foi referido, o esquema de funcionamento passa pela existência de sensores que medem tanto o
valor da excitação a que a estrutura está a ser submetida, como a resposta da estrutura a essa
excitação. É também necessária a existência de dispositivos que processem os dados recebidos
pelos sensores, o input, e que, através dos algoritmos, tenham como output o valor das forças de
controlo a aplicar pelos atuadores na estrutura.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
24
2.3. SISTEMAS DE CONTROLO SEMI-ATIVO
Os sistemas de controlo semi-ativo são sistemas passivos melhorados. Estes sistemas, com o
objetivo de melhorar a performance dos sistemas passivos, incluem sistemas que adaptam as
suas características de amortecimento baseados em informação recolhida da excitação e da
resposta estrutural. Os componentes deste sistema incluem, tal como no caso dos sistemas
ativos, sensores e dispositivos para processar a informação e gerar sinais que são lidos pelos
atuadores. A grande diferença deste tipo de sistemas, em relação aos sistemas de controlo ativo,
é que em vez de aplicar diretamente uma força à estrutura principal, o atuador é utilizado apenas
para alterar as características dos dispositivos de amortecimento passivo.
A energia requerida para este tipo de sistemas é muito inferior àquela que os sistemas ativos
consomem, bastando o uso de baterias, o que se torna vantajoso em caso de falha energética
devido à ocorrência de sismos ou desestabilização da estrutura principal.
Este tipo de dispositivos apresenta no entanto a limitação de apenas adaptar as suas
características a cada ação dinâmica continuando na sua essência a funcionar como um
dispositivo passivo. Ainda assim é uma técnica de controlo que combina os aspetos positivos dos
sistemas ativos e passivos, e que por isso tem vindo a ser cada vez mais estudada e aplicada [4].
2.4. SISTEMAS DE CONTROLO HÍBRIDO
Os sistemas ativos são utilizados para compensar as limitações dos sistemas passivos e
semi-ativos, mas a sua operabilidade depende principalmente de fontes de energia externa o que
também representa uma limitação e para além disso necessitam de equipamentos que tenham
capacidade de gerar forças de grande escala, o que não é possível conseguir sem custos
avultados.
Figura 2.1 Esquema ilustrativo do funcionamento de um sistema de controlo ativo [1]

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
25
Por estas razões os três grupos principais, passivo, semi-ativo e ativo podem ser combinados
entre si e utlizados em conjunto, de modo a combinar as vantagens associadas a cada um. Por
exemplo os dispositivos passivos podem ser utlizados para garantir a maior parcela da redução
necessária da resposta, enquanto os dispositivos ativos são utilizados apenas para garantir um
ajustamento final e garantir que a estrutura permanece em qualquer instante dentro dos
deslocamentos máximos desejados. O sistema de controlo híbrido será o mais adequado se por
exemplo dentro da estrutura principal houver equipamentos extremamente sensíveis e de custos
elevados.
Apesar de serem sistemas mais fiáveis e que requerem menos custos, são sistemas que ainda
assim necessitam de uma quantidade significativa de energia externa[4].
2.5. SISTEMAS DE CONTROLO PASSIVO
Os sistemas de controlo passivo consistem na adição de um ou mais dispositivos à estrutura
principal, estes sistemas absorvem parte da energia transmitida pelas ações dinâmicas, reduzindo a
necessidade de dissipação dessa mesma energia pelas ligações e outros pontos mais frágeis da
estrutura principal [5].
Este tipo de sistemas de controlo não utiliza nenhuma fonte de energia externa, toda a energia que é
dissipada ou utilizada para iniciar movimentos nos dispositivos passivos, tem origem nas vibrações da
estrutura principal, ou tem origem diretamente nas ações dinâmicas que estão a afetar a estrutura
principal.
Devido à maior facilidade de instalação e dos reduzidos gastos em manutenção, continua a ser o
sistema de controlo mais utilizado nas estruturas da engenharia civil.
2.5.1. ISOLAMENTO DE BASE
O isolamento de base é uma técnica usada especialmente no controlo de vibrações devido a ações
sísmicas. O princípio de funcionamento destes sistemas de isolamento assenta na tentativa de tornar
o movimento horizontal da estrutura o mais independente possível do movimento horizontal do solo.
É possível aplicar este conceito na prática, através da eliminação de parte das ligações horizontais da
estrutura ao solo de fundação ou na colocação de dispositivos de apoio com baixa rigidez lateral
entre a estrutura e a fundação, a figura 2.1 é um exemplo de um destes dispositivos.
É necessária uma cuidada avaliação destes dispositivos de apoio, quer pelo facto de estes terem de
assegurar a estabilidade da estrutura na direção vertical. Quer pela possibilidade de ocorrência de
grandes deslocamentos ao nível da base, devido à pequena rigidez dos blocos de apoio, fazendo
com que a frequência fundamental da estrutura seja muito baixa; aumentando desta forma a sua
suscetibilidade às ações do vento [3].

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
26
2.5.2. AMORTECEDORES DE MASSA SINTONIZADA TUNED MASS DAMPERS (TMD)
Este sistema passivo é um dos mais correntemente utilizados, devido à multiplicidade de estruturas
em que pode ser aplicado, e também devido ao facto de este dispositivo ser adequado para atenuar
vibrações e deslocamentos devidos a ações dinâmicas de várias origens.
O objetivo principal dos TMD’s é a transferência de energia de vibração da estrutura principal para a
estrutura secundária formada pelo TMD, que é na sua forma mais simples uma massa auxiliar, ligada
à estrutura principal por um sistema de molas e amortecedores. Cada TMD só pode ser sintonizado
para uma frequência de vibração, através do cálculo da estrutura para um grau equivalente e
respetiva sintonização do TMD à estrutura idealizada, obtém-se na generalidade dos casos a redução
de deslocamentos desejada, se tal não se verificar pode-se controlar mais do que um modo de
vibração usando múltiplos TMD’s (MTMD’s) [6].
O conceito atual de amortecedores de massa sintonizada tem origem nos estudos de supressores de
vibrações para ações dinâmicas, e o primeiro registo sobre o assunto remonta a 1909 num artigo em
que Frahm descreve o uso destes supressores, embora só em 1928 tenha sido publicada a primeira
descrição matemática do funcionamento destes aparelhos da autoria de Den Hartog (Ormondroyd
and Den Hartog, 1928) [7].
A figura que se segue (figura 2.3) é a representação esquemática do aparelho supressor de vibrações
de Frahm, consistindo numa pequena massa m ligada por uma mola de rigidez k à estrutura principal
que é formada pela massa M e pela mola de rigidez K.
Considerando uma carga harmónica simples, é facilmente demonstrável que a massa principal M
pode permanecer estática quando a frequência natural da massa secundária √
é escolhida de
modo a igualar a frequência de excitação da estrutura principal.
Fig. 2.2- Esquema ilustrativo de um dispositivo isolador de base

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
27
Den Hartog (Ormondroyd and Den Hartog, 1928) estudou a teoria dos supressores amortecidos e não
amortecidos no caso do sistema principal ser não amortecido.
Posteriormente o amortecimento na estrutura principal foi incluído nos estudos de Falcon et al (1967),
em que o sistema secundário é sintonizado de modo a obter-se o mínimo pico de resposta e máxima
eficiência no amortecimento da estrutura principal, já que não é possível anular por completo os
deslocamentos da estrutura principal quando esta é amortecida.
Com o objetivo de aumentar a eficiência do supressor na redução da resposta dinâmica do sistema
principal, os investigadores tentaram alargar a banda de frequências de sintonização do sistema
secundário com a introdução de supressores não lineares Roberson (1952). Mais atualmente estudos
foram realizados no sentido de incluir não linearidades no estudo dos TMD’s, nomeadamente Borges
(2008) que incluiu o efeito da não linearidade na rigidez do sistema e a partir daí verificou como tal
efeito aumenta a eficiência do dispositivo na banda de frequências para o qual está destinado [8].
Como na prática as estruturas de engenharia civil estão sujeitas a ações dinâmicas de várias
frequências e com variações no tempo difíceis de prever, como é o caso do vento e dos sismos, a
proposta apresentada anteriormente por Den Hartog (caso simples de um supressor sintonizado numa
só frequência) não tem aplicabilidade absoluta, pelo que existem hoje metodologias para
dimensionamento e localização de múltiplos TMD’s (MTMD’s). Estas são metodologias que requerem
cálculos de extrema complexidade [6]. E, como foi dito anteriormente, quando é possível usar o modelo
equivalente de um grau de liberdade e utilizar apenas um TMD e alcançar os resultados pretendidos, é
na maioria dos casos, a alternativa eleita.
Fig. 2.3- Esquema ilustrativo do aparelho supressor de vibrações de Frahm

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
28
2.5.2.1. AMORTECEDORES DE MASSA SINTOZINADA PENDULARES PENDULUM TUNED MASS DAMPERS (PTMD)
Umas das geometrias possíveis de um TMD é o formato de pêndulo, o pêndulo é preso à estrutura e
o movimento da mesma provoca o movimento oscilatório do pêndulo, transferindo parte da energia de
um sistema para o outro, reduzindo a quantidade de energia que os elementos estruturais necessitam
dissipar.
Este tipo de amortecedor tem a sua frequência de vibração dependente essencialmente do
comprimento do seu cabo e só pode ser considerado um oscilador linear quando as amplitudes de
vibração são menores que 2º.
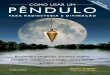
Um exemplo muito conhecido deste tipo de TMD é o edifício Taipei com 101 andares e quase meio
quilómetro de altura, localizado em Taipei, Taiwan. Nesta região ocorrem frequentemente sismos e
tufões, por isso este edifício teve que ser projetado de forma especial. A companhia de engenharia
Evergreen juntamente com os engenheiros Thornton e Tomasetti projetaram um amortecedor
pendular de aço de 660 toneladas e um custo de 4 milhões de dólares. Suspenso do 92º piso para o
88º piso, o pêndulo oscila para amortecer os movimentos do edifício, atingindo eficiências na ordem
dos 60% na redução de oscilações.
Fig. 2.4- TMD pendular do edifício Taipei, localizado em Taiwan

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
29
3
FUNDAMENTOS TEÓRICOS E
FORMULAÇÃO MATEMÁTICA
3.1. INTRODUÇÃO
Neste capítulo irão ser abordados alguns aspetos teóricos, como o fator de amplificação dinâmica e
os parâmetros de que este depende, quer em estruturas sem amortecimento estrutural quer em
estruturas com amortecimento.
Abordam-se as equações de Den Hartog que traduzem a redução do fator de amplificação dinâmica
da estrutura, apenas quando se considera que esta não tem amortecimento estrutural, mediante a
presença de um dispositivo simples constituído por: uma mola, uma massa concentrada e o
coeficiente de amortecimento próprio. De seguida, apresentam-se os desenvolvimentos matemáticos
nesta área, em que se passa a considerar o amortecimento estrutural na determinação da redução do
fator dinâmico, e ainda os fundamentos teóricos para a rápida determinação dos parâmetros ótimos
de um amortecedor de massa sintonizada.
Apresentam-se os princípios da dinâmica que permitem simplificar sistemas e construir modelos de
um grau de liberdade equivalente.
Abordam-se também as especificidades da formulação matemática dos pêndulos e a forma como os
parâmetros ótimos determinados para os TMD’s gerais podem ser encontrados para o caso
especifico do pêndulo
3.2. FATOR DE AMPLIFICAÇÃO DINÂMICA E A SUA REDUÇÃO POR MEIO DE UM AMORTECEDR DE
MASSA SINTONIZADA
3.2.1. EM ESTRUTURAS SEM AMORTECIMENTO
Em seguida apresentam-se os desenvolvimentos de Den Hartog na avaliação da eficiência na
redução da resposta da estrutura principal, nas seguintes condições: quando esta é considerada não
amortecida e quando está sujeita a uma força de excitação sinusoidal de frequência w )sin( 0 twPf
.
Nesta avaliação o efeito dinâmico do TMD é medido em comparação com o deslocamento estático
provocado pela máxima força aplicada na estrutura, sendo que para uma força sinusoidal o valor do
deslocamento estático é K
Pyst
0 e o fator de amplificação dinâmica R é:
222222222222
2222max
)1()2(])1()[(
)2()(
a
a
sty
yR (3.1)

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
30
Sendo:
sw
w - Razão entre a frequência de excitação e a frequência natural da estrutura principal
s
a
w
w - Razão entre a frequência natural do TMD e a frequência natural da estrutura principal
m
kwa -Frequência natural do TMD
M
Kws -Frequência natural da estrutura principal
aca
mw
C
C
C
2 -Coeficiente de amortecimento do TMD
M
m - Razão entre a massa do sistema adicional e a massa do sistema principal
O fator de amplificação dinâmica depende essencialmente de quatro variáveis, µ, β, a and ,
para uma melhor perceção da sensibilidade deste fator às alterações dos valores destas variáveis observa-se a figura 3.1, onde estão desenhados vários gráficos de valores de R em função da razão de frequência β. Para valores fixos de α (α=1 caso de ressonância) e de µ=0,05 atribuindo diferentes valores ao valor do coeficiente .
Fig. 3.1– Fator de amplificação dinâmica fixando os valores de α=1 e µ=0,05
P
Q
0
2
4
6
8
10
12
14
16
18
0,5
0
0,5
5
0,6
0
0,6
5
0,7
0
0,7
5
0,8
0
0,8
5
0,9
0
0,9
5
1,0
0
1,0
5
1,1
0
1,1
5
1,2
0
1,2
5
1,3
0
1,3
5
1,4
0
1,4
5
1,5
0
R
β
ζ_a = 0
ζ_a = 0,1
ζ_a = 0,33
ζ_a = ∞

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
31
No caso de o TMD não ter qualquer amortecimento ou seja 0a , existem dois pontos de
ressonância em que o fator de amplificação dinâmica é infinito, pontos esses em que a frequência da
força de excitação iguala a frequência da estrutura combinada com o TMD. No caso de o coeficiente
de amortecimento tender para infinito, as duas estruturas, a estrutura principal e o TMD, passam a
funcionar como uma só e o resultado é um sistema de apenas um grau de liberdade, em que o fator
de amplificação atinge o infinito num único ponto de ressonância.
Como é logico, o objetivo de adicionar um TMD é reduzir os valores máximos, ou seja os picos de
resposta da estrutura principal ao menor valor possível, ora uma redução no fator de ampliação
dinâmica ao menor valor possível traduz precisamente esse propósito. Observa-se no gráfico da
figura 3.1 que existem dois pontos, o ponto Q e P, assinalados na figura, em que o valor da
amplificação dinâmica (FAD) é o mesmo qualquer que seja o valor do coeficiente de amortecimento
do TMD ( ), ou seja é independente do mesmo. Se estes dois pontos forem ajustados, através da
escolha de valores ótimos para as variáveis , e a , de modo a terem o mesmo valor de FAD,
isto é, a mesma altura no gráfico e a serem os máximos valores do gráfico, consegue-se obter o valor mínimo possível de resposta dinâmica em próximo da unidade.
Portanto, segundo Den Hartog, a razão ótima entre a frequência do TMD e a frequência natural da
estrutura principal, pode ser obtida seguindo o procedimento apresentado:
1
1opt (3.2)
O que faz com que o valor de R para os pontos Q e P seja:
21R (3.3)
Uma boa estimativa para o a ótimo pode ser obtida, impondo que os pontos Q e P correspondam
aos máximos valores do fator de amplificação dinâmica. Substituindo a equação 3.2 na equação 3.1,
deriva-se em ordem a , iguala-se a derivada a zero e impõe-se Q e P como valores máximos e
assim se obtém o valor de a
3)1(8
3
opta (3.4)

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
32
Realizando o processo anteriormente descrito para o valor de 05,0 , obtêm-se os seguintes
resultados: 95238,0 4031,6R e 1273,0opt . Através do desenho do gráfico de R com estes
valores ótimos obtidos (fig. 3.2), facilmente se chega à conclusão que o processo anterior cumpre
os seus objetivos.
Fig. 3.2 Fator de amplificação dinâmica fixando os valores de α=0.08 e µ=0,05
Durante todo procedimento apresentado acima manteve-se o valor de (razão entre a massa do
TMD e a massa da estrutura principal) fixo, mas através da equação 3.3 facilmente se pode
concluir que um aumento da massa do TMD reduz o máximo R (FAD) no caso de um TMD
otimizado pelo processo descrito [9].
3.2.2. EM ESTRUTURAS COM AMORTECIMENTO
As estruturas na realidade possuem sempre algum amortecimento, por mais pequeno que seja.
Quando se fala em edifícios, pontes, e estruturas de grande porte, é desejável que estas tenham
um amortecimento considerável, visto que que as cargas dinâmicas a que estão sujeitas variam
significativamente na gama de frequências de excitações, e poderiam existir casos de ressonância
preocupantes.
A equação (3.1) também pode ser escrita quando o amortecimento da estrutura principal s está
presente [3].
22222222222222
222max
])2())(1([])()1)1(([)2(
)2()(
assa
a
sty
yR
(3.5)
0
2
4
6
8
10
12
14
16
18
0,5
0
0,5
7
0,6
4
0,7
1
0,7
8
0,8
5
0,9
2
0,9
9
1,0
6
1,1
3
1,2
0
1,2
7
1,3
4
1,4
1
1,4
8
R
β
ζ_a = 0,1
ζ_a = 0,33
ζopt=0,12726

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
33
No entanto os pontos fixos P e Q que existiam no caso da estrutura principal não ser amortecida, já
só existem para valores de amortecimento estrutural inferiores a 1%, nos restantes casos
(amortecimento estrutural superior a 1%) deixa de ser possível encontrar estes dois valores fixos.
Passa a ser por isso necessário recorrer a outro métodos para encontrar os valores ótimos de e a .
Um dos métodos possíveis é o método empírico formulado por (Ioi and Ikea,1978) em que os valores
de e a encontrados pelo método descrito anteriormente são corrigidos através das seguintes
fórmulas:
222 )9,10,1()6,27,1241,0(~ssoptopt (3.6)
222 )39,001,0()4,012,013,0(
~ssoptaopta (3.7)
Onde s é o amortecimento da estrutura principal.
Os erros associados às equações descritas acima são menos de 1% para os casos em que 0,03 <
<0,40 e 0,0 < s < 0,15, intervalos de valores que na verdade representam os casos de interesse
prático [5].
Outro método mais geral, que serve para todos os valores de s , é a consulta de ábacos baseados
no estudo da equação 3.5 através de procedimentos numéricos. Na construção destes ábacos, tal
como no procedimento descrito para o caso de se considerar a estrutura principal não amortecida,
procurou-se que os dois valores máximos do gráfico de amplificação dinâmica estivessem ao mesmo
nível e com o menor valor possível.
Estes ábacos fornecem a possibilidade de determinação do valor adequado da massa do TMD em
função do valor do coeficiente de amortecimento estrutural e dos valores de amplificação dinâmica
pretendidos (figura 3.3), o valor ótimo do parâmetro que possibilita a determinação do valor da
rigidez do sistema secundário (TMD) (figura 3.4), e ainda o valor ótimo do coeficiente de
amortecimento do TMD ( a ) (figura 3.5). Estes dois últimos valores são obtidos nos ábacos em
função do parâmetro µ e do valor do coeficiente de amortecimento da estrutura principal ( s )[3]

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
34
Fig. 3.3 Curvas de amplificação máxima do deslocamento do sistema principal
Fig. 3.4 -Curvas para determinação do valor ótimo de

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
35
Fig. 3.5 Curvas para determinação do valor ótimo de ξαopt
Com uma cuidada observação dos gráficos chega-se à conclusão que o fator de amplificação
dinâmica é muito mais sensível à variação do valor de do que à variação do valor do
amortecimento da estrutura secundária a , provando-se isso mesmo com o desenho das curvas de
amplificação dinâmica em função de β variando estes dois parâmetros, e fixando o valor de em
0,01 e do amortecimento estrutural em 01,0s , figura 3.6.
Fig. 3.6- Fator de amplificação dinâmica fixando os valores de ζs=0,01 e µ=0,01
0
2
4
6
8
10
12
14
16
0,6
6
0,7
1
0,7
6
0,8
1
0,8
6
0,9
1
0,9
6
1,0
1
1,0
6
1,1
1
1,1
6
1,2
1
1,2
6
1,3
1
1,3
6
1,4
1
1,4
6
R (
FAD
)
β
ζa=0,06 α=0,99
ζa=0,06 α=0,96
ζa=0,1062 α=0,99

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
36
Como se pode ver, encontrando os valores ótimos dos dois parâmetros em questão, 06,0a e
99,0 , através dos ábacos e desenhando a respetiva curva de FAD, vemos que o valor máximo se
situa por volta dos 11,6, ora alterando em apenas 3% o valor de , ou seja passando de 0,99 para
0,96, sem alterar valor de a (fixando-o no valor ótimo encontrado anteriormente), o valor do pico da
amplificação dinâmica sobe de imediato para os 15,11. Para que o valor máximo da curva seja
também 15,11, mas desta vez só alterando o valor a e fixando o valor de no ótimo, é necessário
que o valor a passe a ser 0,1062, o que representa uma variação de 77,36%.
Conclui-se facilmente que a sensibilidade de sintonização do valor de é muito maior do que o valor
de a , o que na realidade se traduz numa necessidade de cuidado acrescido na fixação do valor da
rigidez do sistema secundário.
3.3. ANÁLISE ESTRUTURAL DE SISTEMAS DE UM GRAU EQUIVALENTE
A sintonização de um TMD segundo o processo descrito anteriormente é válida apenas para sistemas
de um grau de liberdade, como se sabe a maioria das estruturas de engenharia civil têm múltiplos
graus de liberdade. Através de uma análise modal é possível obter vários sistemas de um grau de
liberdade e sintonizar um TMD para cada um desses sistemas de um grau de liberdade, sendo para
isso necessário determinar os valores da massa, rigidez e amortecimento correspondentes a cada
modo de vibração.
Para o cálculo dos valores da massa, rigidez e amortecimento correspondentes a cada modo de
vibração é necessário determinar a configuração dos modos de vibração, o que só é possível
arbitrando um dos componentes do modo de vibração, o que possibilita uma infinidade de
configurações para cada modo de vibração. Esta infinidade de soluções possíveis conduz a que haja
também uma infinidade de valores possíveis para o valor da massa, rigidez e amortecimento, já que a
massa modal é definida pelo produto nTnn MM , a rigidez e amortecimento são definidos de forma
análoga. Convém por isso adotar como critério de normalização destas configurações de cada modo
a fixação de um valor unitário para o grau de liberdade correspondente à implementação do TMD.[3]
Tomando o exemplo de um edifício de vários andares, em que o primeiro modo é o dominante na
resposta a ações laterais do vento, estudos feitos por Kwok e Samali, 1995 [10] mostram que modos
de vibração controlados por TMD’s experimentam diminuições significativas e que os modos de
vibração de ordem superior não são afetados.
Tendo em conta o mesmo exemplo, de um edifício de vários andares, sob o efeito agora de uma ação
sísmica, estudos feitos por Wirsching and Campbell (1974) [11] com o objetivo de minimizar a
resposta para o primeiro modo de vibração, através do dimensionamento dos parâmetros ótimos dos
TMD’s para um edifício de um, cinco e dez andares, mostraram que o valor ótimo da rigidez do TMD
torna-se cada vez menos sensível à variação do amortecimento estrutural e do parâmetro (razão
entre a massa do TMD e a massa da estrutura principal) à medida que o número de andares aumenta
e que o valor ótimo do amortecimento do TMD não é sensível ao valor do amortecimento estrutural
mesmo para caso de edifícios só com um andar [5].

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
37
3.4. FORMULAÇÃO MATEMÁTICA DO MOVIMENTO DE UM PÊNDULO
Os TMD’s pendulares apresentam especificidades em relação aos TMD’s comuns, em primeiro lugar
está o facto de o TMD pendular não estar ligado por molas ao sistema principal, e daí a sua rigidez
não poder ser determinada de forma clássica, já que esta depende do comprimento do fio ou barra(s)
que liga(m) a massa secundária à estrutura principal.
A formulação matemática dos pêndulos é descrita em seguida:
Utilizando as equações de Euler-Lagrange, baseadas no princípio da conservação da energia
mecânica, podemos escrever as equações de movimento do pêndulo:
Fig. 3.7 – Esquema de um pêndulo simples
),(),(),,( , tUtmTtL iiiii (3.8)
Sendo T a energia cinética:
22
2
1lmT (3.9)
U a energia potencial total
mg UUU (3.10)
Cujas componentes são a energia potencial gravítica
))cos(( llgmygmUg (3.11)
e a energia potencial elástica de uma mola rotacional hipotética:
2
2
1mm KU (3,12)
Km
l
m y

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
38
O valor aproximado do cosseno e seno de um ângulo pode ser determinado através da expansão das
séries de Taylor em torno do ponto zero. Como se trata de um pêndulo linear, os valores esperados
para o ângulo, que a barra do pêndulo faz com a vertical que passa no ponto de fixação do pêndulo,
são próximos de zeros.
...!4!2
1)cos(42
(3.13)
(3.14)
Substituindo a equação (3.13) na equação (3.11):
2
)]!2
1[(22
lgmllgmUg (3.15)
22
1
2
1 222
lgmKlmL m (3.16)
Movimento livre:
0)(
ii
LL
t
L
(3.17)
Sendo
)( gmiii
UUUL
i
g
i
mUU
222
2
1 lgmKm
lgmKm
(3.18)
e sendo
22
1 2lmTL
ii
2)( lmL
t i
(3.19)
...!5!3
1)(53
sen

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
39
Então usando a formulação de Lagrange, a equação do pêndulo na sua forma mais simplificada é a
seguinte:
0)(2 lgmKlm m (3.20)
0** Km (3.21)
Em que:
02* Ilmm (3.22)
lgmKK m * (3.23)
Assim sendo a frequência do pêndulo nestas condições é a seguinte:
2*
*
lm
lgmk
m
Kw m
(3.24)
Quando não existe a mola de rigidez
l
gw (3.25)
que é a frequência de um pêndulo simples.
Quando o pêndulo está sujeito a uma força exterior )(tFa horizontal aplicada por exemplo na
extremidade livre do pêndulo, a componente U (energia potencial) passa a ter mais uma parcela,
a parcela UM, correspondente a força exterior:
Mmg UUUU (3.26)
Em que
lFU aM (3.27)
O que conduz a que a equação (3.20) tenha, neste caso, mais uma parcela:
lFlgmKlm am )(2 (3.28)

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
40
3.5. FORMULAÇÃO DAS EQUAÇÕES DE MOVIMENTO DE UM SISTEMA DE UM GRAU DE
LIBERDADE COM UM PÊNDULO ACOPLADO SUBMETIDO A UMA AÇÃO HARMÓNICA.
Na figura 3.8 apresenta-se um esquema simples de um sistema de um grau de liberdade, com
um pêndulo acoplado, constituindo assim um modelo de dois graus de liberdade.
O objetivo deste esquema é representar de forma simplificada as características de estruturas
mais complexas, quando apenas se pretende controlar um modo de vibração e se utiliza o
processo de um grau de liberdade equivalente.
Utiliza-se a configuração de um grau de liberdade equivalente, sendo que eK , eC e em
correspondem respetivamente, à rigidez, amortecimento e massa modal do modo de vibração da
estrutura que se pretende controlar.
Neste caso a massa do pêndulo não é tratada como apenas uma massa pontual idealizada na
extremidade do pêndulo, como é feito na formulação de um pêndulo simples. Nesta modelação o
fio do pêndulo, é uma barra rígida com massa não desprezável bm , e a massa é materializada
numa esfera de raio pR e massa pm .
Fig. 3.8 – Esquema de sistema de um grau de liberdade com um pêndulo acoplado submetido a uma força
harmónica Fa(t)
Utilizando de novo as equações de Lagrange para obter as equações de movimento livre da estrutura
total composta pela estrutura principal e pelo sistema do pêndulo.
aiiii
Fq
D
q
U
q
T
q
T
dt
d
)( (3.29

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
41
Sendo o vetor de forças exteriores que atuam sobre o sistema e um qualquer grau de liberdade
generalizado (que neste caso pode corresponder a - deslocamento horizontal do sistema - ou a -
ângulo formado pelo pêndulo, medido pela vertical que passa no seu ponto de suspensão)
Sendo T a equação da energia cinética correspondente ao sistema da fig.3.8 tem-se:
cos)2
1)(())(
5
2
3
1(
2
1)(
2
1 22222 ylmlRmlRmRmlmymmmT bbbppbppppbbpbe
(3.30)
Em que bm é a massa da barra do pêndulo, pm é a massa da esfera do pêndulo, bl é o comprimento
da barra do pêndulo e pR é o raio da esfera do pêndulo.
Sendo U a equação da energia potencial tem-se:
cos)2
1)((
2
1
2
1 22 glmlRmkyKU bbbppme (3.31)
Em que mk é a rigidez da mola rotacional ligada ao pêndulo
E sendo D a energia dissipativa do sistema tem-se:
2
2
1yCD e (3.32)
Quando yqi
)sin())2
())2
(()cos()()( 2 ppp
bbppbp
bpbe Rmm
mlRmlm
mymmm
y
T
dt
d
0
y
T
yKy
Ue
yCy
De
Quando iq
ylmlRmylmlRmlRmRmlmT
dt
dbbbppbbbppbppppbb
)sin()
2
1)(()cos()
2
1)(()(
5
2
3
1()( 222
)sin()2
1)((
ylmlRm
Tbbbpp
)sin()2
1)((
glmlRmk
Ubbbppm
0
D

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
42
Tendo em conta os cálculos anteriores e considerando válida a hipótese de pequenos ângulos
para o movimento do pêndulo:
Em que 1)cos( , )sin( e 02
As equações de movimento tomam a seguinte forma:
)()2
1)(()( tFyKyClmlRmymmm aeebbbpppbe
0)2
1)(()
2
1)(())(
5
2
3
1( 222 glmlRmkylmlRmlRmRmlm bbbppmbbbppbppppbb
Chega-se a conclusão de que quando consideramos uma barra rígida com massa não
desprezável, e que a massa principal não é uma massa pontual idealizada mas assume uma
forma esférica, situação mais próxima da realidade, a frequência do pêndulo, parâmetro de
extrema importância na sintonização do TMD com a estrutura principal, passa a ser:
222 )(5
2
3
1
)2
1)((
bppppbb
bbbppm
lRmRmlm
glmlRmk
W
(3.33)
Se af for uma ação harmónica a equação pode ser resolvida seguindo os passos usuais na
resolução de múltiplos graus de liberdade para ações harmónicas, se for um impulso variável
no tempo terá que ser usado por exemplo um integral de Duhamel depois das equações serem
desacopladas.
0)2
1)((0
0
00
0
)(5
2
3
1
2
1)(
2
1)(
222
a
bbbppm
ee
bppppbbbbbpp
bbbpppbe fy
glmlRmk
KyCy
lRmRmlmlmlRm
lmlRmmmm

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
43
3.6. FORMULAÇÃO DAS EQUAÇÕES DE MOVIMENTO DE UM SISTEMA DE UM GRAU DE LIBERDADE COM
UM PÊNDULO ACOPLADO SUBMETIDO A UMA EXCITAÇÃO NA BASE
Utilizando o mesmo esquema da figura 3.8, em que se constrói um modelo de um grau de liberdade,
simulando a configuração de um grau de liberdade equivalente (para estruturas mais complexas), ao
qual está acoplado um pêndulo cuja barra é rígida e tem massa não desprezável e a sua massa principal
é materializada através de uma esfera de dimensões também não desprezáveis. Modifica-se a natureza
da ação que atua sobre o sistema, passando de uma ação harmónica atuando diretamente no sistema,
para uma excitação na base sobre a qual o sistema está apoiado, figura 3.9.
Fig. 3.9 – Esquema de sistema de um grau de liberdade com um pêndulo acoplado submetido a uma excitação
na base
Tendo em conta os cálculos efetuados para o caso anterior, o de uma ação harmónica, e sabendo que a
equação de equilíbrio dinâmico no caso de aceleração do solo é a seguinte [12]:
gumkuucum
Sendo )(tug o deslocamento do solo, )(tu o deslocamento relativo da estrutura em relação ao solo e
)(tut o deslocamento absoluto da estrutura.
gpbeeebbbppbbbpppbe ymmmyKyClmlRmlmlRmymmm )()2
1)(()
2
1)(()( 2
glmlRmkylmlRmlRmRmlm bbbppmbbbppbppppbb )2
1)(()
2
1)(())(
5
2
3
1( 222
gbbbpp ylmlRm )2
1)((

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
44
Neste caso y é o deslocamento relativo entre o sistema e o apoio, gy é o deslocamento do
apoio e ty é o deslocamento absoluto do sistema.
A frequência do pêndulo em nada se altera com a mudança do tipo de ação que atua sobre o sistema.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
45
4
APLICAÇÃO A CASOS
PRÁTICOS SIMPLES
4.1. APLICAÇÃO DE UM TMD PENDULAR A UM PÓRTICO DE UM PISO E UM VÃO.
Com o intuito de demonstrar a aplicabilidade deste tipo de TMD e de testar e calibrar a sua análise
em elementos finitos no software SAP2000, construiu-se um exemplo de um pórtico simples,
constituído por um só andar rígido, apoiado em duas barras, encastradas tanto no andar rígido
como nos apoios, tal como se ilustra na Figura 4.1.
Fig. 4.1- Pórtico simples sujeito a uma ação horizontal harmónica F(t)
Em primeiro lugar considerou-se apenas a estrutura representada acima, figura 4.1 e realizaram-
se todos os cálculos relativos à mesma: frequência natural de vibração, rigidez, massa e
deslocamentos máximos devido à ação horizontal F(t).
A segunda estrutura a ser calculada, é em tudo semelhante à da figura 4.1, incluindo a carga
harmónica a que está sujeita, mas tem acoplado a si um TMD pendular, como ilustra a figura 4.2.
Realizaram-se novamente todos os cálculos necessários à obtenção dos valores da frequência
natural de vibração, da rigidez e da massa e do valor mais relevante, o do deslocamento máximo.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
46
Fig. 4.2- Pórtico simples com TMD pendular acoplado sujeito a ação horizontal harmónica F(t)
Recorrendo aos ábacos das Figuras 3.3, 3.4, 3.5, é possível estimar valores de partida para os
parâmetros do TMD pendular, tais como a rigidez, a massa da barra e a massa concentrada, e
assim proceder ao cálculo dos deslocamentos da estrutura incluindo o TMD, através das equações
de Lagrange e através do software SAP2000.
Considera-se que o pórtico é constituído por dois pilares e uma viga rígida, tendo os dois pilares a
mesma seção quadrada de m0,030,03 , o peso volúmico de 3kg/m 5002 e o módulo de Young (E)
igual a GPa 20 , simulando a utilização de um betão normal. A viga é considerada rígida, tem uma
seção de m0,10,1 e um peso volúmico de 3kg/m 5002 e a ação F(t) é uma força sinusoidal.
No caso da Figura 4.1, do pórtico simples, efetuando alguns cálculos simples obtêm-se a massa, a
rigidez e a frequência natural da estrutura.
Considerando que a rigidez ao deslocamento unitário da viga, na horizontal, é igual a:
3
122
l
EIK portico (4.1)
mNK portico /40502
1203,01020122
3
49
(4.2)
Calcula-se a massa, através do conhecimento do peso volúmico e considerando a simplificação de
assumir que apenas metade da massa de cada um dos pilares é relevante para o deslocamento da
viga na horizontal obtém-se a massa de 160,5 kg. Sabendo estes dois valores, sabe-se também a frequência própria rad/s 5,02=W e Hzf 7995,0
Usando o software SAP2000, construiu-se o mesmo modelo, tornando a barra horizontal rígida
através do bloqueio de rotações no eixo y (eixos explícitos na Figura 4.3) na imagem o que
aparentam ser apoios da barra horizontal são apenas a representação do bloqueio das rotações.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
47
Modelaram-se os apoios encastrados através da restrição de movimento ao valor zero de todos os
graus de liberdade.
Efetuando uma análise modal, foi possível extrair as frequências de vibração próprias, sendo que
para este caso, apenas a frequência correspondente ao primeiro modo de vibração, vibração na
direção horizontal (direção x), tem relevância.
Fig. 4.3- Extração dos modos de vibração no programa SAP2000
O resultado fornecido pelo software para o primeiro modo de vibração tal como se pode observar
na Fig. 4.3 é Hzf 799,0 , correspondendo ao valor esperado.
Considera-se que o pórtico tem um coeficiente de amortecimento de 01,0 , trata-se de um
valor corrente para as estruturas reais, e é necessário que a estrutura possua algum
amortecimento, de outra forma torna-se mais complexo tratar os fenómenos de ressonância.
Considera-se uma força harmónica horizontal e sinusoidal de ))28,0sin((10)( ttf , força
arbitrada de modo a que a sua frequência iguale a frequência natural da estrutura e assim se
verifiquem fenómenos de ressonância, procede-se ao cálculo do deslocamento máximo
horizontal da barra rígida, utilizando a teoria da resposta harmónica de sistemas amortecidos
[12].
Equação de movimento do sistema amortecido:
wtpkuucum osin (4.3)
Neste caso, as condições iniciais do movimento são o deslocamento inicial ser nulo 0)0( u e a
velocidade inicial ser igualmente nula 0)0( u . Como a frequência da ação iguala a frequência

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
48
natural da estrutura, e a estrutura possui amortecimento, através da expressão 4.4 é possível
rapidamente saber o valor do deslocamento máximo.
2
1
k
pu o
MÁX (4.4)
Sendo MAXu o deslocamento máximo, op a amplitude da força, k a resistência da estrutura e
o coeficiente de amortecimento da estrutura. Aplicando a fórmula temos muMAX 123,0
Os resultados obtidos no software SAP2000 confirmam os resultados obtidos analiticamente, o
gráfico apresentado, figura 4.4 refere-se ao deslocamento horizontal do nó 2 que é o nó da
extremidade esquerda da barra rígida.
Fig. 4.4-Deslocamentos do nó 2 ao longo do tempo obtidos no software SAP2000
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0 6 12 18 24 30 36 42 48 54 60 66 72 78
Deslo
cam
ento
(m
)
Tempo (s)
Pórtico Isolado - deslocamento horizontal do nó 2

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
49
Analisando de novo o nó 2, mas desta vez em termos de acelerações, obtêm-se os seguintes
resultados:
Fig. 4.5-Acelerações do nó 2 ao longo do tempo obtidos no software SAP2000
Como se pode observar no gráfico fornecido pelo programa a aceleração máxima é de 2/079,3 sm .
Na escolha dos parâmetros do TMD pendular a utilizar, o primeiro parâmetro a ser escolhido foi a
percentagem de massa do TMD em relação a massa da estrutura principal, o parâmetro
. Este
parâmetro influencia diretamente os cálculos da frequência ótima de sintonização, e em traços
gerais pode dizer-se que maior valor de conduz a melhores resultados na redução do fator de
amplificação dinâmica que por sua vez se traduz na redução dos deslocamentos máximos, tal como
explicita a equação 3.3. O equilíbrio entre o fator económico e a percentagem de redução nos
deslocamentos e acelerações máximas pretendidas, tende a ser o mais importante na escolha do
valor de . Tomando o exemplo do edifício Taipei 101 cuja massa total é 705130 toneladas,
admitindo de modo grosseiro que os modos de vibração podem ser obtidos igualando a estrutura a
uma consola e que a massa modal do primeiro modo de vibração ronda os 30% [13], obtém-se uma
massa de 211539 toneladas. O TMD utilizado tem uma massa de 660 toneladas, o que corresponde a um 003,0 tendo tido um custo de 4 milhões de dólares.
O exemplo anterior é o de um caso muito particular em que as massas envolvidas excedem em
larga escala a corrente gama de utilizações dos TMD’s. Para este caso escolheu-se seguir os
valores utilizados em [14] e [15] e utilizar uma massa de 1,605 kg correspondendo a um 01,0
-4
-3
-2
-1
0
1
2
3
4
0 6 12 18 24 30 36 42 48 54 60 66 72 78
Acele
ração (
m/s
2)
Tempo (s)
Pórtico Isolado - Aceleração horizontal do nó 2

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
50
A frequência ótima de sintonização do TMD tendo em conta o valor de 01,0 e tendo em conta a
equação 3.2 seria a seguinte:
99,001,01
1
1
1
opt (4.5)
sradWTMD /97,402,599,0 (4.6)
Admitiu-se numa primeira definição dos parâmetros do TMD uma massa pontual idealizada e a
existência de uma mola rotacional, sem nenhum tipo de rigidez rotacional o software SAP2000 não
consegue fornecer resultados.
Para se conseguir uma exata sintonização do TMD a 4,97 rad/s e sabendo que a rigidez rotacional
tem que ser relevante, chega-se aos seguintes valores:
sradlm
lgmkw m /97,4
091,1605,1
091,181,9605,130
22
(4.7)
Tem-se portanto, o valor de rigidez rotacional igual a 30 Nm/rad e o comprimento do fio igual a
1,091m. Tal como é ilustrado na figura seguinte:
Fig. 4.6 – Modelação da estrutura com pêndulo no software SAP2000
Modelou-se o fio no software SAP2000 como uma seção pequena, constituído por um material
infinitamente rígido, com o valor da massa por metro cubico igual a zero e aplicou-se na extremidade
livre uma massa pontual de 1,605 kg. É necessário também, como foi explicado antes, aplicar a
rigidez rotacional.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
51
Chega-se assim ao valor de deslocamento máximo do nó 2 (mesmo nó do caso do pórtico isolado) de
m041008,3 . Os deslocamentos máximos passam de 12,12 centímetros para 0,308 milímetros,
trata-se de uma redução muito significativa.
Fig. 4.7 – Deslocamentos ao longo do tempo da estrutura com pêndulo (nó 2) no software SAP2000
Também em relação às acelerações se observam reduções significativas, sendo em percentagem de
redução ligeiramente maior que a redução dos deslocamentos, a aceleração máxima observada
passa de 2/079,3 sm para 23 /10606,6 sm
Fig. 4.8 – Acelerações ao longo do tempo da estrutura com pêndulo (nó 2) no software SAP200
-0,0004
-0,0003
-0,0002
-0,0001
0
0,0001
0,0002
0,0003
0,0004
0 6 12 18 24 30 36 42 48 54 60 66 72 78
Deslo
cam
ento
(m
)
Tempo (s)
Pórtico c/ pêndulo sintonizado na frequência ótima- desl. horizontal nó 2
-0,0004
-0,0003
-0,0002
-0,0001
0
0,0001
0,0002
0,0003
0,0004
0 6 12 18 24 30 36 42 48 54 60 66 72 78
Acele
ração (
m/s
2)
Tempo (s)
Pórtico c/ pêndulo sintonizado na frequência ótima- Acel.horizontal nó 2

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
52
No artigo [16], apresentação feita numa conferência em São Paulo Brasil, estudou-se uma turbina
eólica, e o uso de um TMD pendular para o controlo de resposta dinâmicas devido à ação do
vento.
A torre eólica e o pêndulo e as respetivas ações dinâmicas foram analisados no pacote de
elementos finitos ANSYS. Foi usada uma ação harmónica de t)(w cos 10000 de frequência
variável, e analisados os deslocamentos para cada frequência, através de um gráfico de
frequência vs. deslocamento. O uso de um TMD pendular de 8% da massa total da torre eólica fez
com que o deslocamento máximo passasse de m-3102,1 , com a ação a atuar na frequência 0,8
Hz, para um deslocamento máximo de m-10103,2 , para uma frequência de 0,75 Hz.
Neste exemplo da torre eólica é usada uma percentagem de massa para o dispositivo de controlo
excessivamente grande, quando comparada com os valores correntes, mas serve o exemplo para
mostrar que grandes reduções dos deslocamentos na ordem de mais de 90%, através de TMD
pendulares, são possíveis.
Como se pode concluir destes exemplos, a perfeita sintonização de um TMD pendular, pode
implicar adoção de valores para parâmetros, como a percentagem de massa do TMD ou o
comprimento do fio, difíceis de materializar na realidade. No exemplo do pórtico chegou-se a um valor para o comprimento do fio de m091,1 este valor é mais do que metade da altura do pórtico,
numa estrutura real poderia ser impossível implementar um dispositivo com estas características.
O que acontece em muitas situações é que não é necessário reduzir tão drasticamente os valores
dos deslocamentos e acelerações máximas. E então procura-se arranjar um equilíbrio entre a
redução do valor da resposta estrutural, o valor do comprimento do fio, o valor da rigidez rotacional
e o valor do deslocamento máximo da extremidade livre do pêndulo. Mudando o comprimento do
fio para o valor de 0,5 m e mantendo a massa e a rigidez iguais, a frequência do pêndulo assume
o seguinte valor:
sradlm
lgmkw m /72,9
5.0605,1
5.081,9605,130
22
(4.8)
Ficando a estrutura final, pórtico com TMD acoplado, com a seguinte configuração:
Fig. 4.9-Portico com pêndulo alterado definido no software SAP2000

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
53
Sendo esta a seguinte configuração para o primeiro modo de vibração:
Fig. 4.10-Primeiro modo de vibração do pórtico com pêndulo alterado no software SAP2000
A utilização do pêndulo sintonizado fora da frequência ideal, conduz aos seguintes resultados de deslocamentos e acelerações ao longo do tempo:
Fig. 4.11 – Deslocamentos ao longo do tempo (nó 2) no software SAP2000
-0,04
-0,03
-0,02
-0,01
0
0,01
0,02
0,03
0,04
0 6 12 18 24 30 36 42 48 54 60 66 72 78
Deslo
cam
ento
(m
)
Tempo (s)
Pórtico c/ pêndulo alterado - desl. horizontal nó 2

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
54
Fig. 4.12 – Acelerações ao longo do tempo (nó 2) no software SAP2000
Mesmo utilizando um pêndulo que não está sintonizado de forma a atuar na sua máxima
eficiência, a redução dos deslocamentos máximos está na ordem dos 77%, passando de 0,1218m
para 0,0276m, e a redução das acelerações na ordem dos 78%, passando de 3,079m/s2 para
0,6706m/ s2.
Ainda assim o comprimento do fio ainda é considerável 0,5 representa ¼ da altura do pórtico, e o
valor do deslocamento máximo da extremidade livre do pêndulo atinge valores pouco
aconselháveis, esta e outras questões são discutidas adiante na variações dos parâmetros e são
apresentadas outra soluções que envolvem fios mais curtos e outras rigidezes rotacionais.
4.2. VARIAÇÃO DOS DIFERENTES PARAMETROS DO TMD PENDULAR APLICADO NO PÓRTICO DE
UM PISO E UM VÃO
Em seguida apresentam-se quatro casos distintos de sintonização do TMD pendular, um primeiro
correspondente ao pórtico isolado, o segundo em que o TMD pendular é sintonizado na frequência
ótima, o terceiro refere-se a um pêndulo com o fio de comprimento 0,5m, o quarto a uma ainda
maior diminuição do comprimento do fio para 0,2m e o quinto mantém o fio com o comprimento de
0,5m mas aumenta a rigidez rotacional do pêndulo para 50 Nm/rad.
Em todos estes casos de estudo a ação que atua sobre o pórtico é a mesma que na alínea
anterior e o tempo de atuação também, ou seja a ação ))28,0sin((10)( ttf medida durante
80s.
O quadro 4.2 mostra os resultados mais significantes retirados da análise computacional, no
software SAP2000, dos cinco casos de estudo
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
0 6 12 18 24 30 36 42 48 54 60 66 72 78
Acele
ração (
m/s
2)
Tempo (s)
Pórtico c/ pêndulo alterado- Acel. horizontal nó 2

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
55
Quadro 4.1- Casos de estudo
Descrição dos casos
Caso 1 Pórtico Isolado
Caso 2 Pêndulo ótimo - Comprimento de 1,091m e rigidez de 30 Nm/rad
Caso 3 Pêndulo - Comprimento de 0,5m e com rigidez de 30 Nm/rad
Caso 4 Pêndulo - Comprimento de 0,2m e com rigidez de 30 Nm/rad
Caso 5 Pêndulo - Comprimento de 0,5m e com rigidez de 50 Nm/rad
Quadro 4.2 -Casos de estudos e respetivos resultados
Deslocamento máximo do nó 2
(m)
Deslocamento máximo do pêndulo (m)
Ângulo θ (rad) Aceleração
máxima do nó 2 (m/s2)
Caso 1 0,122 - - 3,079
Caso 2 3,08E-04 0,019 0,018 3,00E-04
Caso 3 0,028 0,088 0,080 0,671
Caso 4 0,077 0,012 0,011 1,928
Caso 5 0,057 0,053 0,049 1,421
São também apresentados dois gráficos, o dos deslocamentos e o das acelerações, ambos
referentes ao nó 2 ao longo dos 80s. Os gráficos contêm os valores correspondentes aos cincos
casos de estudo.
Fig-4.13- Deslocamentos ao longo do tempo dos cinco casos de estudo
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0 6 12 18 24 30 36 42 48 54 60 66 72 78
Deslo
cam
ento
(m
)
Tempo (s)
Deslocamento Ux do nó 2
Pórtico isolado-Caso1
Pórtico c/ TMD -Caso 3
Portico c/ TMD-Caso 2
Pórtico c/ TMDCaso 4
Pórtico c/ TMDCaso 5

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
56
Fig 4.14- Acelerações ao longo do tempo dos cinco casos de estudo
Como se pode comprovar pela observação dos resultados obtidos, a variação dos parâmetros
envolvidos na rigidez do pêndulo alteram significativamente os resultados da redução da resposta
dinâmica, mesmo mantendo constante a massa do TMD.
A redução do comprimento pode em muitas situações, por motivos de logística, ser inevitável, por
este motivo no caso 4 estuda-se uma redução do comprimento do pêndulo para 0,2m. Obtêm-se
ainda assim resultados significativos de aproximadamente 36% na redução dos deslocamentos
máximos e de 37% na redução das acelerações máximas. É de notar que neste estudo está a ser
utilizada uma carga harmónica que tem exatamente a mesma frequência do pórtico, o que faz com
que a estrutura entre em ressonância, ou seja que atinga valores de resposta dinâmica altíssimos, a
introdução de um dispositivo pendular altera a frequência própria da estrutura e introduz uma massa
que induz forças no sentido contrário ao da ação dinâmica. Em estruturas reais as ações
condicionantes, como é o caso do vento, têm frequências variantes no tempo e nem sempre excitam
as frequências naturais da estrutura, logo a eficiência dos TMD pendulares não atinge em geral a
gama de valores apresentados neste capítulo.
Outra questão que é necessária ter em conta durante o dimensionamento do TMD, é o deslocamento
máximo esperado da extremidade livre do pêndulo, porque durante os cálculos é assumida a hipótese
de pequenos ângulos, como se pode ver nos gráficos seguintes, esta hipótese só é válida dentro de
certos valores de ângulos:
-4
-3
-2
-1
0
1
2
3
4
0 6 12 18 24 30 36 42 48 54 60 66 72 78
Acele
ração (
m/s
2)
Tempo (s)
Aceleração Ux do nó 2
Pórtico isolado-Caso1
Pórtico c/ TMD -Caso 3
Portico c/ TMD-Caso 2
Pórtico c/ TMDCaso 4
Pórtico c/ TMDCaso 5

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
57
Fig 4.15 Aproximação da função de sin(x) à função de x
Fig 4.16 - Aproximação da função de cos(x) à função de

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
58
O ângulo do pêndulo no caso 3 ainda se encontra dentro dos valores para os quais a hipótese
de pequenos ângulos pode ser assumida, mas apesar disso um deslocamento de quase 9 cm
da extremidade livre do pêndulo (Quadro 4.2) pode não ser compatível com o desenho
estrutural do sistema. Neste caso idealizado são 9 cm de deslocamento máximo mas em
estruturas reais pode atingir valores mais altos e comprometer a integridade estrutural se o
espaço de manobra do pêndulo for, por algum motivo, limitado.
Em relação à fórmula mais exata para a sintonização do TMD pendular, a equação 3.33:
222 )(5
2
3
1
)2
1)((
bppppbb
bbbppm
lRmRmlm
glmlRmk
W
Observando-a com atenção e experimentando valores para os vários parâmetros chegam-se
as seguintes conclusões: se considerarmos um peso total para o TMD pendular e essa mesma
massa for distribuída pela esfera e pela barra, serão necessários comprimentos maiores para
se alcançar a mesma frequência. Isto porque a situação que conduz ao mínimo fio é a que
concentra maior percentagem de massa na extremidade (na massa esférica). Mas se se
considerar que a massa estipulada para o TMD é a massa da esfera, e que a massa dos cabos
ou barras não entram na massa do TMD mas são considerados na equação então temos também a situação do fio mais curto possível e como no fundo existe maior fator , a
eficiência do TMD aumenta.
4.3. PÓRTICO MULTIPISO DE UM VÃO
Constrói-se agora um exemplo de um pórtico de dez pisos e um vão, este exemplo pretende
aproximar o estudo da realidade e cobrir também o caso do controlo de vibrações em
estruturas com múltiplos graus de liberdade. E aferir assim se o controlo de apenas o primeiro
ou dos dois primeiros modos de vibração é suficiente para a satisfatória redução da resposta
dinâmica.
Fig 4.17-Esquema do pórtico de dez pisos e características de cada piso
Andar Massa (kg) Rigidez (kN)
1 179060 62470
2 170060 59260
3 161060 56140
4 152040 53020
5 143040 49910
6 134040 46790
7 125040 43670
8 116040 40550
9 107040 37430
10 97540 34310
Total 1384960

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
59
Em seguida apresentam-se as deformadas dos primeiros 4 modos de vibração e a tabela dos
primeiros 12 modos de vibração obtidas no software SAP2000.
Fig 4.18 – Deformada dos primeiros 4 modos de vibração
Fig 4.19 – Valores dos 12 primeiros modos de vibração

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
60
Considerou-se neste caso uma ação harmónica em ressonância com o primeiro modo de vibração,
portanto ))248817,0sin(()( tAtf , para cada um dos andares, mas com amplitudes
decrescentes linearmente desde de 3,5 KN até 0,35 KN no primeiro andar. Com isto pretende-se
aproximar o estudo deste pórtico multipiso à realidade, já que por exemplo no caso de um prédio de
vários andares o vento atua em toda a fachada e aumenta com a altura, apesar de não linearmente,
como por questões de simplificação dos cálculos se considerou neste caso.
Os resultados dos deslocamentos e acelerações ao longo do tempo (80s) do décimo piso,
considerando um coeficiente de amortecimento de 1% constante para todos os modos de vibração,
são os seguintes:
Fig 4.20 – Deslocamentos ao longo do tempo do último piso
Fig 4.21 – Acelerações ao longo do tempo do último piso
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0 10 20 30 40 50 60 70 80
Deslo
cam
ento
(m
)
Tempo (s)
Deslocamento horizontal
-1,5
-1
-0,5
0
0,5
1
1,5
0 10 20 30 40 50 60 70 80
Deslo
cam
ento
(m
/s2)
Tempo (s)
Aceleração horizontal

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
61
Portanto obtiveram-se os valores máximos de 0,1277 m e 1,209 m/s2 respetivamente para o
deslocamento e aceleração ao longo dos 80 s
Para uma correta sintonização do TMD pendular a utilizar para controlar o primeiro modo de vibração
é necessário saber a massa modal do primeiro modo, o software não disponibiliza diretamente esses
valores, por isso é necessário extrair as matrizes de rigidez e de massa e fazer os cálculos
separadamente.
A massa modal do primeiro modo de vibração é 589083 kg, utilizando um fator 01,0 obtém-se o
valor de 5890,83kg. Tendo em conta as equações 3.2 e 3.24, respetivamente
1
1opt e
2lm
lgmkw m . Sintoniza-se o TMD para a frequência ótima de 3,03 rad/s, utilizando uma rigidez
rotacional de 50 Nm/rad, chega-se ao valor ideal de 1,069 m para o comprimento do fio.
Aplicou-se ao pórtico de dez pisos o pêndulo idealizado, e voltou-se a extrair os resultados ao longo
do tempo dos deslocamentos e acelerações do último piso:
Fig 4.22 – Modelo do pórtico de dez pisos com TMD pendular acoplado

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
62
Fig 4.23 – Deslocamentos ao longo do tempo do último piso com TMD pendular
Fig 4.25 – Acelerações ao longo do tempo do último piso com TMD pendular
Com a introdução deste dispositivo de controlo foi possível obter a redução em termos de
deslocamentos, de 0,1277 m para 0,0603m o que representa uma percentagem de redução de
52,8%.Em termos de acelerações, a percentagem de redução foi de 49%, passando de
1,209m/s2 para 0,611 m/s
2.
Se a percentagem de redução pretendida for maior do que a obtida através do controlo do
primeiro modo de vibração, é necessário ou aumentar a massa do TMD ou então controlar o
segundo modo de vibração
-0,08
-0,06
-0,04
-0,02
0
0,02
0,04
0,06
0,08
0 10 20 30 40 50 60 70 80
Deslo
cam
ento
(m
)
Tempo (s)
Deslocamento c/ pêndulo
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
0 10 20 30 40 50 60 70 80
Deslo
cam
ento
(m
/s2)
Tempo (s)
Aceleração horizontal c/ pêndulo

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
63
Como já foi dito anteriormente os cálculos associados à colocação de múltiplos TMD’S são de
extrema complexidade, o que em seguida se apresenta é apenas a colocação da hipótese de um
segundo TMD a controlar o segundo modo de vibração ser eficaz e verificar se isso ocorre ou não.
No segundo modo de vibração, como se pode observar na figura 4.7, o piso que sofre maior
deslocamento é o 4 piso, por esse motivo é o piso escolhido para a colocação do segundo TMD
pendular. Este TMD pendular adicional é sintonizado segundo a frequência e massa modal do 2º
modo de vibração.
Através do mesmo procedimento descrito para o controlo do primeiro modo, chega-se ao valor da massa modal para o 2º modo de vibração: 295938kg. Utiliza-se neste caso um fator de 005,0
já que se trata de um dispositivo adicional, sintoniza-se o pêndulo para a frequência de 8,12 rad/s,
utilizando a equação 3.24 e adotando o mesmo valor de 50 Nm/rad para a rigidez rotacional,
obtém-se o valor de 0,15 m para o comprimento do fio.
As reduções observadas tanto nos deslocamentos como nas acelerações, apesar de existirem são
muito reduzidas:
Fig 4.13 – Modelo do pórtico de dez pisos com 2 TMD pendulares acoplados

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
64
Fig 4.11 – Deslocamentos ao longo do tempo do último piso com 2 TMD pendulares
Fig 4.12 – Acelerações ao longo do tempo do último piso com 2 TMD pendulares
Como se pode observar as reduções foram na ordem dos 0,5% nos dois casos, o deslocamento
máximo reduziu ligeiramente de 0,06026 m para os 0,0599 m e a aceleração máxima de 0,6111 m/s2
para os 0,6046 m/s2.
Neste caso, a utilização de mais do que um TMD pendular não se mostrou eficaz, pelo menos na
configuração proposta, sob a ação harmónica idealizada que foi utilizada.
É preciso ter em conta que a ação estava a excitar o primeiro modo de vibração, ou seja a resposta
estrutural é fortemente dominada pelo primeiro modo de vibração. Se se tratassem de outras
frequências de excitação, por exemplo, uma excitação com frequência mais próxima da frequência do
-0,08
-0,06
-0,04
-0,02
0
0,02
0,04
0,06
0,08
0 10 20 30 40 50 60 70 80
Deslo
cam
ento
(m
)
Tempo (s)
Deslocamento c/ 2 pêndulos
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
0 10 20 30 40 50 60 70 80
Deslo
cam
ento
(m
/s2)
Tempo (s)
Aceleração horizontal c/ 2 pêndulos

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
65
segundo modo, é de esperar que as contribuições de cada um dos TMD se alterassem, e o TMD que
esta a controlar o segundo modo de vibração tivesse um papel mais ativo do que no caso
apresentado.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
66

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
67
5 ESTUDO DO CONTROLE DE
VIBRAÇÕES COM TMD PENDULAR
NUMA ESTRUTURA REAL
5.1. DESCRIÇÃO E MODELAÇÃO COMPUTACIONAL DA PAREDE DE REAÇÃO DA PLATAFORMA
DE ENSAIOS DA METALOGALVA
Com objetivo de aplicar numa estrutura real os conhecimentos descritos anteriormente, e de
trabalhar com ações do vento dimensionadas segundo o Eurocódigo 1, optou-se por utilizar os
dados geométricos do pré-dimensionamento de uma parede de reação da plataforma de ensaios
(ou banco de ensaios) da Metalogalva. Trata-se de um estrutura de grande porte e altura, que
será construída na Trofa no âmbito do projeto VHSSPOLES [17, 18], e que servirá de apoio a
ensaios de estruturas de grande envergadura através do uso de cabos que ligam as estruturas
que estão a ser ensaiadas à parede de reação; também através dos cabos são aplicadas a
protótipos de estruturais reais (torres de transmissão construídas na metalomecânica) as
respetivas ações de acordo com o cadernos de encargos de receção dessas estruturas [17, 18]
O banco de ensaios é constituído por 2 paredes de reação, uma principal e uma secundária,
apenas existem neste momento dados de pré-dimensionamento da parede secundária. Logo o
estudo incidirá apenas nesta parede secundária e trata-se de um estudo em que se analisa a
parede quando não se está a realizar nenhum ensaio, mas esta continua a sofrer ações do vento
e sismo.
Neste momento em Portugal ainda não existe nenhum banco de ensaios, mas a imagem
seguinte, é a fotografia de um banco de ensaios situado na India em Nagpur:
Fig. 5.1- Bancos de ensaios de Nagpur

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
68
Nesta tese, apenas se tratará da problemática do vento, porque devido à altura da estrutura, 100 m,
será de esperar que o vento seja a ação mais condicionante, e para além disso os TMD pendulares,
assunto central da tese, apesar de em vários estudos e casos práticos se terem mostrado eficazes no
controlo de respostas dinâmicas devidas à ocorrência de sismos, têm no vento a sua principal
aplicação.
O pré-dimensionamento e dimensionamento final da parede de reação secundária que está a ser
realizada no âmbito do projeto VHSSPOLES está ilustrada na figura 5.2, a imagem foi retirada do
software Autodesk Robot Structural Analysis Professional 2013, software onde foi realizado o pré-
dimensionamento da estrutura a 3 dimensões. Na imagem podem ver-se as várias perspetivas da
estrutura.
Fig. 5.2- Imagem, retirada do software Autodesk Robot Structural Analysis, da parede de reação secundária.
Neste trabalho optou-se por não dar um peso excessivo à modelação estrutural, com o objetivo de
dar mais importância à problemática do controlo. Por este motivo, optou-se por não efetuar uma
modelação tridimensional pesada, utilizou-se em vez disso um modelo a duas dimensões, na direção
transversal (na figura 5.2 é a imagem do meio), de modo a captar essencialmente os modos de
flexão. Esta foi a única direção considerada porque a direção correspondente à terceira imagem da
figura 5.2 é extremamente rígida,não se justificando portanto a sua análise como demonstrativa da
aplicação do desempenho do TMD pendular nessa direção.
Sabendo os dados fornecidos pelo pré-dimensionamento no software Autodesk Robot Structural
Analysis Professional 2013, como secções, comprimentos e materiais, foi possível proceder à
construção do modelo bidimensional no software SAP2000. Que é o software no qual todo o restante
trabalho foi realizado e cujas funcionalidades e particularidades são mais claras, comparativamente
com o software Autodesk Robot Structural Analysis.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
69
A estrutura é uma estrutura reticulada, e as seções, inercias e materiais foram todos fornecidos pelos
dados do pré-dimensionamento, modelo final na direção considerada e os respetivos modos de
vibração (apenas na direção Y), são apresentados em seguida:
Fig. 5.3- Modelo bidimensional da parede de reação secundária
Fig. 5.4- Modelo bidimensional da parede de reação secundária

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
70
5.2. AÇÕES E RESPOSTAS DINÂMICAS DA PAREDE DEVIDAS AO VENTO
Um largo número de investigações tem sido feito ao longo das últimas décadas, no sentido de
desenvolver um espectro que pudesse adequadamente prever as características dinâmicas do vento.
A ação do vento por se tratar analiticamente de um escoamento turbulento em interação com corpos
imersos, reveste de extrema complexidade o seu cálculo e a sua previsão.
Em casos em que a ação do vento necessita de ser calculada com a maior exatidão possível, são
construídos modelos físicos à escala, e estes são testados em tuneis de vento, que simulam as
propriedades do escoamento.
As quantificações dinâmicas das pressões do vento e forças generalizadas ao longo do tempo, são
análises complexas e de difícil implementação, por isso como o objetivo deste trabalho não é o
cálculo exaustivo das ações dinâmicas que atuam sobre as estruturas mas sim o seu controlo,
algumas simplificações serão consideradas durante este cálculo.
A interação do fluido com a estrutura, (fluid structure interaction FSI), será considerada desprezável e
serão também consideradas correlações simplificadas da variação da velocidade do vento ao longo
da altura da estrutura.
Em primeiro lugar é exposta a metodologia a utilizar para gerar séries de vento temporais, que
posteriormente serão utilizadas no cálculo da pressão dinâmica instantânea, e consequentemente na
quantificação da carga temporal atuante ao nível de cada travamento da parede de reação, ou seja
de 20 em 20 metros.
Esta metodologia utilizada para gerar séries temporais é usualmente referida como o Método de
Shinozuka, que baseia a geração de séries temporais no cálculo da função inversa da transformada
de Fourier cuja amplitude é gerada num processo aleatório [19].
A geração de séries temporais ocorre na gama de comprimentos de onda correspondentes aos
valores da flutuação da velocidade do vento, com uma distribuição aproximadamente gaussiana do
processo do escoamento atmosférico.
O propósito deste método é obter a realização de um processo estocástico a partir da função de
densidade espectral que carateriza o processo aleatório.
O método usa essa função para fazer uma soma ponderada de funções sinusoidais, somando N
ondas dadas pelo espetro ),( nzSL para cada componente n (frequência natural de cada onda). As
fases obtêm-se, no caso de espectro unidimensional de séries simples não correlacionadas, por
geração de números pseudo aleatórios compreendidos entre os valores de 0 e 2 π.
Segundo o método de Shinozuka, no caso mais simples de processos estocásticos unidimensionais e
univariados, uma realização do processo poderá ser obtida pela equação:
n
k
kkk twAtu
1
).cos(2)( (5.1)
Em que,

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
71
wwSA kk ).( (5.2)
E que
N
www máx min (5.3)
N representa o número de frequências de discretização do espectro, kw é a frequência angular igual
kn.2 em que kn é a frequência e k é a fase correspondente a cada frequência discreta obtido de
forma pseudo aleatória no intervalo de [0;2π].
Para gerar as séries de vento temporal é necessário que se defina uma função de densidade
espectral para as flutuações de velocidade longitudinal do vento. Foi escolhida a função de densidade
espectral dada pelo EC1:
3/52 )),(2,101(
),(8,6),(),(
kL
kL
v
kvkkL
nzf
nzfnzSnnzS
(5.4)
Sendo
)(
)(),(
zv
zLnnzf
m
kkL (5.5)
E
a
tt
z
zLzL )()( (5.6)
Onde )(zL é a escala de turbulência, ),( kv nzS é a variação unidimensional do espectro, ),( kL nzf é
uma frequência adimensional e v é o desvio padrão da turbulência.
Segundo Jorge Henriques e Rui Barros [14] para que a geração de séries corresponda a um
processo ergódico N deve ser suficientemente elevado sendo 1000 um número que demonstra bons
resultados.
Estas flutuações foram calculadas para uma elevação de H=60 m e considerando que a parede de
reação se situava num terreno de classe I segundo o Eurocodigo1. A velocidade base que foi
assumida, para um período de retorno de 50 anos, foi de 30 m/s (zona B no EC1) e de acordo com o
EC1 para estas condições o valor do desvio padrão é de 7,5v .
A velocidade instantânea do vento )(tU em qualquer altura da estrutura é dada pelo somatório da
componente média constante U com a componente dinâmica flutuante )(tu

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
72
A força instantânea do vento )(tF em qualquer superfície A é dada pelas seguintes equações:
2)](.[...2
1)( tuUActF f (5.7)
222 )(....2
1).(.....
2
1....
2
1)( tuActuUAcUActF fff (5.8)
A conversão do espectro de potência das flutuações da velocidade do vento para o espectro da
resposta é dada por:
)().(.)](.[4
)( 22
2nSnnH
U
XnS uX (5.9)
Onde )(2 n representa a função de admitância aerodinâmica. Numa análise no domínio da
frequência é esta função que tem em conta a não ocorrência em simultâneo das flutuações de
velocidade em grandes estruturas.
De acordo com o EC1, para estruturas com a forma da do caso de estudo considerado, os
parâmetros da função densidade espectral para o cálculo do fator estrutural devem ser calculados
para uma altura de referência de aproximadamente 0,6 vezes a altura do edifício. Tendo em conta
esta indicação a altura escolhida foi de 60 metros para a geração de diferentes séries de vento.
Assim as forças instantâneas foram obtidas através da equação 5.7 tendo em conta as pressões
dinâmicas e a área de influência de cada piso da parede, e considerando a equação 5.10 em baixo,
retirada do EC1 e as flutuações da velocidade do vento dadas pelas séries de vento geradas
brm vzczczv ).().()( 0 (5.10)
A título exemplificativo é exposto um gráfico de forças instantâneas obtidas seguindo o processo de
cálculo, este gráfico corresponde à serie 1 gerada para o 2 nível (ou seja 40 metros de altura) da
parede:
Fig. 5.5- Forças instantâneas geradas na serie 1 gerada para o 2 nível
0
5
10
15
20
25
30
35
40
0 40 80 120 160 200 240 280 320 360 400 440 480 520 560 600
F(t)

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
73
Após serem calculadas a primeira série de vento correspondentes a cada nível de altura da parede
de reação, e introduzidas no software SAP2000 como se ilustra na figura seguinte:
Fig. 5.6- Forças instantâneas geradas na serie 1 para cada nível de altura
Foi obtido o seguinte gráfico de deslocamentos no ponto mais da parede de reação:
Fig 5.7- Deslocamentos ao longo do tempo do ponto mais alto da parede
-0,01
0
0,01
0,02
0,03
0,04
0,05
0 40 80 120 160 200 240 280 320 360 400
Deslo
cam
ento
(m
)
Tempo (s)
Deslocamento

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
74
E o seguinte gráfico de acelerações ao longo do tempo:
Fig 5.8- Acelerações ao longo do tempo do ponto mais alto da parede
Estes foram os resultados obtidos para a primeira série de ventos geradas, para obter resultados
fiáveis seria necessário realizar o cálculo para pelo menos 4 séries diferentes e depois proceder às
médias dos valores. Neste trabalho apenas se realizarão os cálculos para a primeira série devido a
limitações de tempo e também porque a metodologia de aplicação do TMD para um caso destes fica
suficientemente ilustrada com os cálculos para uma só série.
5.3. DIMENSIONAMENTO DO TMD PENDULAR
Tratando-se uma estrutura bastante rígida como demonstram os resultados para os modos de
vibração, fig 5.4, o pêndulo terá um comprimento reduzido como se irá demonstrar nos cálculos.
A massa modal do primeiro modo é kg310 19186.3 , escolhendo de novo um fator de 01,0 tem-se
uma massa de kg310 191,86 para o TMD pendular.
Utilizando as seguintes equações
1
1opt e
2lm
lgmkw m . Sintoniza-se o TMD para a
frequência ótima de 8,329 rad/s, utilizando uma rigidez rotacional de 50 N, chega-se ao valor ideal de
0,1613 m para o comprimento do fio.
-1,5
-1
-0,5
0
0,5
1
1,5
0 40 80 120 160 200 240 280 320 360 400
Acele
ração (
m/s
2)
Tempo (s)
Aceleração

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
75
Aplicando o TMD na estrutura no ponto mais alto da mesma, chega-se aos seguintes resultados:
Fig 5.9- Deslocamentos ao longo do tempo do ponto mais alto da parede com aplicação do TMD
Fig 5.10- Acelerações ao longo do tempo do ponto mais alto da parede com aplicação do TMD
Pode ver-se desde já que o pêndulo reduziu significativamente os resultados quer dos deslocamentos
quer das acelerações, logo em seguida será feita uma discussão mais pormenorizada sobre estes
resultados.
0
0,00005
0,0001
0,00015
0,0002
0,00025
0 40 80 120 160 200 240 280 320 360 400
Deslo
cam
ento
(m
)
Tempo (s)
Deslocamento c/ pêndulo
-0,01
-0,005
0
0,005
0,01
0,015
0 40 80 120 160 200 240 280 320 360 400
Acele
ração (
m/s
2)
Tempo (s)
Aceleração c/ pêndulo

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
76
5.4. DISCUSSÃO DE RESULTADOS
Devido à redução significativa dos deslocamentos, não foi possível construir um gráfico com as duas
situações, deslocamento no topo da parede com e sem TMD, porque as diferenças de escala de
valores torna pouco legível o gráfico.
Através da observação da redução do máximo deslocamento, através dos valores numéricos, o
máximo passou de m210837,4 para m410370,2 e através das escalas dos gráficos apresentados
nas figuras 5.7 e 5.10 pode concluir-se que a utilização neste caso de um TMD pendular foi
extremamente eficiente.
Já no caso das acelerações, figuras 5.8 e 5.10 o pêndulo mostra-se igualmente eficaz, o valor
máximo da aceleração passou de 2/98,0 sm para 2/011,0 sm
No software é possível materializar uma massa muito grande com um comprimento pequeno de
0,15m, mas a realidade é que seria muito difícil que o grande volume de massa funcionasse
corretamente com um comprimento de fio desta grandeza.
É por isso que os TMD’s pendulares são mais indicados para estruturas mais flexíveis, já que
conduzem a comprimentos maiores do fio.
Visto que 191 toneladas é um número dificilmente concretizável na realidade e os resultados são
excessivamente positivos, se este fosse um estudo de implementação concreta de um TMD, a sua
massa seria consideravelmente reduzida e os cálculos com várias series de vento seriam realizadas
de novo e muito provavelmente a utilização de TMD na sua forma mais comum seria tida em conta.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
77
6
CONCLUSÃO
6.1. CONSIDERAÇÕES FINAIS
Durante a vida útil de uma estrutura esta está sujeita a diversas cargas dinâmicas, cargas essas,
que podem provocar o colapso imediato ou então por fadiga. Muitas vezes a intensidade da carga
pode simplesmente tornar-se percetível aos utilizadores da estrutura, quer se trate de edifícios
muito altos ou de pontes pedonais, provocando desconforto e sensação de insegurança nos
utilizadores.
As novas tecnologias, permitem estruturas cada vez mais altas e esbeltas tornando-as
particularmente sensíveis ao vento, e é precisamente neste caso que os TMD’s (Tuned Mass
Dampers) assumem especial importância, quer na garantia de que não ocorrem danos imediatos
ou danos por fadiga, quer na poupança de materiais no dimensionamento de estruturas
assumindo desde logo que se irá utilizar posteriormente TMD’s no seu controlo.
No início do trabalho mais concretamente no segundo capítulo, é feita uma revisão do estado de
arte, abordando os vários mecanismos de controlo existentes.
Esta revisão do estado de arte permitiu conhecer as vantagens e desvantagens de cada tipo de
solução. Conclui-se que os TMD’s por serem dispositivos passivos e não necessitarem de fontes
de energia externa, são os mais fiáveis em caso de corte de abastecimento de energia. Foi
também abordado o caso do Taipei 101 que é um caso real de aplicação de um TMD pendular e
que demonstra resultados muito positivos.
No capítulo seguinte foram abordadas as questões relacionadas com a formulação matemática
dos pêndulos e também questões relacionadas com a diminuição do fator de amplificação
dinâmica para os TMD’s em geral. Foi possível assim encontrar uma metodologia para a ótima
sintonização do TMD pendular.
No quarto capítulo foi aplicado a pórticos simples um ou mais TMD’s pendulares. Concluiu-se que
um TMD pendular apenas, se pode mostrar extremamente eficaz se todos os parâmetros forem
escolhidos de forma ideal, o que nem sempre é possível; testaram-se pêndulos a trabalhar fora da
sua frequência ótima e ainda assim os resultados mostraram-se compensadores.
Concluiu-se que quanto maior for a massa do TMD maior a eficiência da diminuição da resposta
estrutural mas também se viu que isso acarreta custo económicos, nem sempre necessários.
Discutiu-se a hipótese de ser vantajosa a colocação de um TMD pendular extra e concluiu-se que
pelo menos quando a estrutura está a ser excitada próxima da frequência de vibração do primeiro
modo, controlar outros modos de vibração tem uma contribuição quase nula.
Ainda no quarto capítulo discutiram-se as particularidades da equação do pendulo quanto à
garantia da sua linearidade e também se discutiu a distribuição de massa ao longo do cabo,
concluindo que a máxima eficiência na diminuição do comprimento do pêndulo consegue-se
quanto mais massa estiver concentrada na extremidade do pêndulo.
No quinto capítulo estudou-se a aplicação de um TMD numa estrutura real de grande altura mas
também de grande rigidez; quando solicitada por ações do vento, dimensionadas segundo o
Eurocódigo 1 a atuar em todos os níveis de travamento, ou seja de 20 em 20 metros. E concluiu-se que o TMD pendular é eficaz, mas que é necessário escolher de forma correta o valor de

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
78
porque senão tem-se valores muito positivos na redução da resposta dinâmica, mas como se trata
de uma estrutura muito pesada, facilmente o valor da massa do TMD se torna excessivo e deixa
de compensar economicamente. E é também necessário verificar se os comprimentos do fio por
se tratar de uma estrutura rígida, são demasiado pequenos para um correto funcionamento na
realidade.
Este trabalho permitiu entrar em contacto com a problemática do controlo estrutural e permitiu
também comprovar a importância e eficiência da utilização de TMD’s pendulares.
6.2. PROPOSTAS DE DESENVOLVIMENTOS FUTUROS
Este trabalho permitiu também por em evidência temas que poderão ser desenvolvidos no futuro,
nomeadamente:
- A implementação de TMD’s pendulares para controlar ações sísmicas
- O estudo a três dimensões de estruturas de forma a analisar o funcionamento destes dispositivos
quanto às respostas torsionais.
- Estudar de forma mais aprofundada a gama de comprimentos de fios que podem ser
implementados na realidade.

Controlo de respostas dinâmicas em estruturas através de TMD’s pendulares
79
REFERÊNCIAS BIBLIOGRÁFICAS
1. Oliveira, F.d.S., Critérios de projeto para amortecedor tipo pêndulo para controle de
vibrações em edifícios altos. 2012.
2. Mekki, O.B., Amortissement semi-actif des structures flexibles, 2006, Ecole des Ponts
ParisTech.
3. Moutinho, C.M.R., Controlo passivo e activo de vibrações em pontes de peões, 1998.
4. Saeed, T.E., et al., A state-of-the-art review of structural control systems. Journal of Vibration
and Control, 2013.
5. Soong, T.T. and G.F. Dargush, Passive energy dissipation systems in structural engineering.
1997.
6. Bandivadekar, T. and R. Jangid, Optimization of multiple tuned mass dampers for vibration
control of system under external excitation. Journal of Vibration and Control, 2012.
7. Hunt, J. and J.-C. Nissen, The broadband dynamic vibration absorber. Journal of sound and
vibration, 1982. 83(4): p. 573-578.
8. Borges, R.A., Contribuição ao estudo dos absorvedores dinâmicos de vibrações não-lineares,
2008.
9. Brock, J.E., A note on the damped vibration absorber. Journal of Applied Mechanics, 1946.
13(4): p. A284.
10. Kwok, K. and B. Samali, Performance of tuned mass dampers under wind loads. Engineering
Structures, 1995. 17(9): p. 655-667.
11. Sadek, F., et al., A method of estimating the parameters of tuned mass dampers for seismic
applications. Earthquake Engineering and Structural Dynamics, 1997. 26(6): p. 617-636.
12. Clough, R.W. and J. Penzien, Dynamics of structures, 1975.
13. Nascimento, J.N.D.C.L., Análise do funcionamento de TMDs pendulares no controlo de
vibrações em edifícios muito altos. 2011.
14. Henriques, J.M. and R.C. Barros, Comparison of a Tall Lattice Wind Tower Response With
and Withou a TMD. , in 4th International Conference on Computational Methods in
Structural Dynamics and Earthquake Engineering, C. 2013, Editor 2013: Kos Island, Greece.
15. Barros, R.C. and F.M. Paiva, Comparison of a Cantilever Sign Support Response Subjected to
wind Gusts, With and Without a TMD, in 4th International Conference on Computational
Methods in Structural Dynamics and Earthquake Engineering, C. 2013, Editor 2013: Kos
Island, Greece.
16. Santos, L., et al., Structural Control of a wind turbine tower using a tuned mass damper via
finite element method, in ESSS Conference & Ansys Users Meeting2013: São Paulo Brasil
17. Henriques, J.M., R.C. Barros, and F. Paiva, Review of Transmission Tower Testing Stations
Around the World. SciVerse Science Direct, 2013. ELSEVIER Procedia Engineering,
Volume 57 Pages 859–868.
18. Henriques, J.M., R.C. Barros, and F. Paiva, Bancos de Ensaio no Mundo para Torres de
Transmissão de Energia Eléctrica. ISBN: 978-989-95605-6-7, Depósito legal: 361057/13
ed. Comunicação inserida na área técnica “Grandes Projectos”, páginas 111-120. 2013,
Maputo, Moçambique: Associação Portuguesa de Construção Metálica e Mista.
19. Ferreira, N.A.C., Efeito do Vento em Edifícios Altos: aplicação a um caso concreto, in
Faculdade de Engenharia 2008, Universidade do Porto