Embed Size (px)
Citation preview

OS 4ème 1
2012-2013 PG
n corps peut être animé d’un mouvement de translation et d’un mouvement de rotation. Il peut y avoir également une superposition de ces 2 types de mouvements.
Définition : mouvement de translation Nous avons à faire à un mouvement de translation lorsqu’une ligne joignant 2 points quelconques du corps reste parallèle à elle-même. Nous parlerons de mouvement de rotation dans le cas contraire. Ces mouvements s’appliquent à des solides. Mais, au fait, qu’est-ce qu’un solide ? Définition : corps solide Un corps est dit solide lorsque les positions des points matériels le constituant sont fixes les unes par rapport aux autres. On peut distinguer 2 types de systèmes de points matériels : 1.- Un système dont la distribution des PM est discrète : on peut les compter, les dénombrer. C’est le cas par exemple de l’étude de 2 corps en interaction, chaque corps étant approximable par un PM. 2.- Un système dont la distribution des PM est continue : on ne peut plus compter les PM, car il y en a une infinité. C’est le cas d’un solide non approximable en tant que PM.
Pour calculer certaines grandeurs importantes, on emploie des notations différentes selon le type de système. Ainsi, la masse totale s’écrit : m = ∑mi pour une distribution discrète (i = 1,…..N) m = ∫dm pour une distribution continue (N à ∞ et mi àdm) Exemple Calculer la masse totale d’une sphère de rayon R dont la distribution de masse est donnée par sa masse volumique ρ(r) :
2)(rCr =ρ
Rotations
Energie de rotation et moment d’inertie Supposons qu’un corps solide soit en rotation autour d’un axe fixe. Toutes les particules qui le composent ne vont pas à la même vitesse : plus une particule se situe loin de l’axe, plus elle se déplace rapidement. En revanche, par rapport à l’axe, toutes les particules tournent du même angle pendant un intervalle de temps donné. On caractérise la rotation du solide par sa vitesse angulaire ω : tous les points du solide ont la même vitesse
Chapitre 4 : Les mouvements de rotation, les systèmes de particules et le centre de masse
U

OS 4ème 2
2012-2013 PG
angulaire ω. Il est bien clair qu’un corps en rotation possède une énergie cinétique liée à la rotation. L’énergie cinétique du corps est la somme de l’énergie cinétique de chaque PM de masse mi :
Ecin = ∑12
mi vi2 (1)
Puisque la vitesse angulaire caractérise la rotation et est la même pour chaque PM, il convient d’exprimer les vitesses vi en fonction de cette vitesse angulaire. vi = ω ri (2) où ri = distance du PM de masse mi à l’axe de rotation Donc
Ecin = ( ) 2222
21)(
21
21
ωωω Irmrm iiii ==⋅ ∑∑ (3)
Il apparaît un terme entre parenthèses 2( )i im r∑ qui est lié non seulement à la masse du corps solide, mais plus précisément à une distribution de sa masse. Ce terme est appelé moment d’inertie I du corps relativement à l’axe de rotation. L’inertie d’un corps est la résistance qu’il oppose au changement dans l’état de son mouvement. Cette résistance est physiquement représentée par la masse inertielle. Cette même propriété de la matière intervient comme une résistance au changement dans le mouvement de rotation ; elle est alors appelée inertie de rotation. Cette résistance rotationnelle dépend à la fois de la quantité de masse et de sa répartition autour de l’axe de rotation.
Définition : moment d’inertie Le moment d’inertie I d’un corps autour d’un axe est défini par : I =
2∑ ii rm [kg.m2] (4)
où ri = distance du PM de masse mi à l’axe Si on choisit l’axe Oz // à l’axe fixe de rotation (ce qu’on fait souvent par convention), le moment d’inertie vaut : I = ( )∑ + 22
iii yxm (5) Le moment d’inertie tient compte de la distribution de masse autour de l’axe : chaque masse est pondérée par le facteur 2
ir , si bien que 2 corps peuvent avoir la même masse, la même géométrie, mais les moments d’inertie par rapport à l’axe peuvent être différents. Notons qu’un corps, s’il ne possède qu’une masse, peut posséder une infinité de moments d’inertie puisqu’on est libre de choisir autant d’axes que l’on désire. On doit donc toujours préciser par rapport à quel axe on calcule I.
Moments d’inertie des corps rigides Dans le cas d’un corps rigide (distribution de masse continue), la somme discrète I =
2∑ ii rm est remplacée par une intégrale. Nous devons faire la
somme des contributions des éléments de masse infinitésimaux dm, donc chacun apporte la contribution dI = r2 dm au moment d’inertie. L’élément de masse dm doit être choisi de telle sorte que toutes les particules qui le composent soient situées à la même distance perpendiculairement à l’axe. Le moment d’inertie du corps solide devient : I = dI∫ = r2∫ dm
où r = distance perpendiculaire à un axe

OS 4ème 3
2012-2013 PG
Exemple Soit 2 cylindres, les 2 de masse m, de rayon R et de hauteur h. L’un est creux et toute sa masse est distribuée à la périphérie, l’autre est plein et sa masse est distribuée uniformément. Calcule leur moment d’inertie relativement à leur axe de révolution.
Le centre de masse Un système est un ensemble bien défini de particules qui peuvent ou non interagir ou être reliées entre elles. Quelle que soit la complexité du mouvement du système, il existe un seul point, le centre de masse, noté CM, dont le mouvement de translation caractérise le système dans son ensemble. L’existence du CM peut être montrée de la manière suivante.
2 masses m1 et m2 sont reliées par une tige de masse négligeable. Si l’on applique une force F
sur la tige en un point quelconque, le système subit
une rotation. Mais, si l’on applique la force au CM, le seul mouvement observé est une translation (figure c). En ce sens, le système se comporte comme si toute sa masse était concentrée au CM. On observe que : l2/ l1 = m1/m2 <=> m1l1 = m2l2 (6) On peut exprimer la position du CM dans le système de coordonnées représenté à la figure ci-dessus : l1 = xcm – x1 et l2 = x2 - xcm (7) En remplaçant ces valeurs dans l’équation précédente, on obtient m1(xcm – x1) = m2( x2 - xcm) (8) ainsi
xcm = 21
2211
mmxmxm
+
⋅+⋅ (9)
La position du centre de masse est une moyenne pondérée dans laquelle chaque coordonnée est multipliée par la masse située en ce point. Le même raisonnement s’applique à un nombre quelconque de particules ainsi qu’à un système à 3 dimensions.

OS 4ème 4
2012-2013 PG
Pour N particules, nous avons :
cmr =
∑
∑
=
=N
ii
N
iii
m
rm
1
1
(10)
où
m = ∑=
N
iim
1
= masse totale du système (11)
Le CM d’un corps symétrique homogène est toujours situé sur un axe ou un plan de symétrie. Le CM d’une sphère homogène, d’un disque homogène ou d’une tige homogène est situé en leur centre géométrique. Dans le cas d’un corps solide composé de plusieurs morceaux symétriques, on peut déterminer la position du CM du corps en considérant chaque morceau comme une masse ponctuelle possédant la masse du morceau et située au CM du morceau. Le problème revient à déterminer la position du CM d’un ensemble de masses ponctuelles. Soit un système S de masse m formé de 2 sous-systèmes S1 et S2 de masse m1 et m2 respectivement (m = m1 + m2). Soit 1Gr
et 2Gr
les positions respectives des centres de masse G1 et G2 des sous-systèmes S1 et S2. La position du CM de S est donnée par :
21
2211
mmrmrm
r GGG +
+=
Finalement, si l’origine du référentiel est choisie sur le CM, on a rG =0
donc 01
=⋅∑
=i
N
ii rm
Exemple : détection d’exoplanètes, exoplanète autour d’alpha du centaure
Exemple : Une tige mince de longueur 3L forme un coude à angle droit à une distance L d’une de ses extrémités. Déterminer la position du CM par rapport au coude (origine O du système d’axe Oxy) . On donne L= 1,2 m.
Le mouvement du CM Quelle est la validité de la 2ème loi de Newton ? Nous avons déjà vu précédemment qu’elle est valable pour des PM. L’est-elle également pour un solide ? Dérivons l’expression (10) 1 fois :
iiCM vmM
v ∑= 1
(12)
Nous pouvons réécrire cette équation en considérant la quantité de mouvement totale P
:
P
= M . CMv
= ...2211 ++ vmvm
(13)

OS 4ème 5
2012-2013 PG
La quantité de mouvement totale P
d’un système de particules est équivalente à celle d’une seule particule de masse M = ∑mi se déplaçant à la vitesse du centre de masse CMv
.
Nous pouvons donc traiter les mouvements de translation d’objets étendus ou de systèmes de particules comme s’il s’agissait de particules ponctuelles dont toute la masse serait concentrée au CM. Dérivons une nouvelle fois (12) :
iiCM am
Ma ∑=
1 (14)
Il s’agit de l’expression donnant l’accélération du CM et M
iiCM ama ∑=
= iF∑
(15)
où iF
= force résultante sur la ième particule.
or
iF∑
= extF∑
+int∑F
(16)
et les forces intérieures qui s’exercent entre elles s’annulent 2 à 2 (par la 3ème loi de Newton ou loi de l’action et de la réaction), ne laissant que la force extérieure résultante ∑= extext FF
. Nous pouvons donc écrire que la
2ème loi de Newton pour un système de particules s’écrit : CMext amF
⋅= (17) Le centre de masse accélère comme le ferait une particule ponctuelle de masse m = ∑mi qui serait soumise à la force extérieure résultante.
Théorème du centre de masse (2ème loi de Newton généralisée à un système) La somme des forces extérieures appliquées sur un système est égale à la masse m de ce système multipliée par l’accélération du CM. CMext amF
⋅= (18) Exemple : Si on lance un haltère en lui imprimant une rotation, on peut se rendre compte qu’un seul point décrit rigoureusement une parabole : c’est le centre de masse. Les autres points décrivent des trajectoires plus ou moins compliquées. La 1ère loi de Newton devient alors : Si 0
=extF , alors 0
=CMa et =CMv
constante (19)
Si la force extérieure résultante sur un système de particules est nulle, la vitesse du CM reste constante.
Energie cinétique d’un système L’énergie cinétique d’un système de particules peut en général se diviser en 2 termes : l’énergie cinétique du CM et l’énergie cinétique par rapport au CM, dite relative. Théorème : L’énergie cinétique d’un système est égale à la somme de l’énergie cinétique de translation qu’aurait le système si toute sa masse était concentrée en son centre de masse et de l’énergie cinétique vue du référentiel du CM :
Ecin = ∑+2*2
21
21
iiG vmmv (20)
où =*iv
vitesse de la ième particule vue du CM.
Gv
= vitesse du CM

OS 4ème 6
2012-2013 PG
Développement : Compte tenu de la définition du moment d’inertie, l’énergie cinétique du corps en rotation ( vG = 0), devient :
Ecin = 22)*(21
ωiirm∑ = 2
21ωI (21)
Pour une même vitesse angulaire, l’énergie de rotation d’un corps est d’autant plus grande que son moment d’inertie est grand. Il est intéressant de comparer cette énergie cinétique de rotation avec l’énergie de translation d’un PM de masse m.
Rotation Translation
Ecin 2
21ωI 2
21mv
La formulation est la même : la vitesse angulaire ω est pour les rotations ce que la vitesse v est pour les translations. De même, le moment d’inertie est pour les rotations ce que la masse est pour les translations. Si le corps solide possède, en plus du mouvement de rotation, un mouvement de translation, nous savons que l’Ecin totale est égale à la somme de l’énergie cinétique de translation du CM auquel on attribue la masse du corps et d’énergie cinétique de rotation autour du CM :
Ecin = 22
21
21
ωGG Imv + (22)
Précisons que dans ce cas, l’énergie de rotation est calculée par rapport à l’axe passant par le CM. Exemple : Déterminer l’énergie cinétique d’un cylindre plein de masse m qui roule à la vitesse v sur un plan.
Equation fondamentale de la dynamique des systèmes en rotation Accélération angulaire Dans un mouvement en rotation uniforme, la vitesse d’un PM à une distance R de l’axe de rotation s’exprime par : v = ω R (23) où v = vitesse linéaire [m/s] ω = vitesse angulaire [rad/s]

OS 4ème 7
2012-2013 PG
En dérivant (23), nous obtenons :
dtdR
dtdv ω
= (24)
soit at = Rα (25) avec at = accélération tangentielle L’accélération centripète ac vaut quant à elle :
Rvac2
= (26)
Elle est différente de zéro même si la vitesse en norme est constante. En résumé, si la direction et le module de v varient tous les deux, les 2 accélérations ta et ca existent et sont perpendiculaires. Moment de force Lorsqu’on applique la 2ème loi de Newton à la rotation d’un corps, on simplifie considérablement l’étude du mouvement si l’on fait intervenir une grandeur appelée moment de force. Nous allons voir que le moment de force est l’analogue d’une force dans le cas de la rotation : la force produit l’accélération linéaire, le moment de force produit une accélération angulaire. Archimède est certainement l’un des scientifiques les plus célèbres de la Grèce antique. Il va utiliser le « bras de levier » pour soulever des masses importantes. Pour prouver au roi de Syracuse que l’effet d’un bras de levier pouvait être considérable, Archimède lui propose de déplacer, seul, une galère remplie. La légende dit qu’il a réalisé cet exploit d’une main et assis !
Le moment de force, noté MF, est défini par le produit de la distance r entre le point d’application de la force et le point pivot P:
MF = r⊥ · F Son unité est le [m.N] (qui se lit « mètre newton ») et elle mesure l’effet de rotation que la force provoque sur la barre. La distance dont il est question est appelée « bras de levier » ; elle se mesure depuis l’axe sur une perpendiculaire à la droite d’action de la force. Le moment de force est en fait un produit vectoriel : Le vecteur moment de force M
s’écrit :
FrM
×= où
r ×F = produit vectoriel du vecteur position r et de la force F
Par propriété du produit vectoriel, nous pouvons noter : M = r . F . sinθ où θ = angle entre les vecteurs F
et r

OS 4ème 8
2012-2013 PG
Soit un corps rigide tournant autour d’un axe fixe. Soit mi, la masse de la ième particule.
Le moment de force M
pour une masse ponctuelle mi de ce corps, forcée de se déplacer sur un cercle de rayon ri, sous l’influence d’une force Fi, s’écrit :
Mi =ri ×Fi (27)
où
r ×F = produit vectoriel du vecteur position et de la force F
Par propriété du produit vectoriel, nous pouvons noter : Mi = Fi
. ri . sinθ (28) où θ = angle entre les vecteurs F
et r
Seule la composante Fit de la force, tangentielle à la trajectoire circulaire, va accélérer la particule. Par la 2ème loi de Newton et (25), nous pouvons écrire : Fit = mi ait = mi . ri . α (29) Et le moment de force Mi sur la particule par rapport à l’axe vaut : Mi = ri . Fit = mi . ri
2 . α (30) En additionnant les moments de force de toutes les particules : M = I α (31) où M = ∑Mi = moment de force extérieur résultant sur le corps I = moment d’inertie par rapport à l’axe donné
L’équation (31) a la même forme que ∑ amF = . Ainsi, le moment de
force est à la rotation ce que la force est à la translation : il crée une accélération angulaire et elle engendre une accélération linéaire sur les particules du corps. Exemple : Une poulie en forme de disque a une masse M = 4 kg et un rayon r = 0,5 m. Elle tourne librement sur un axe horizontal. Un bloc de masse m = 2 kg est suspendu par une ficelle qui passe sur la poulie sans glisser. Quelle est la vitesse angulaire de la poulie 3s après que l’on ait lâché le bloc ? Déterminer le module de la vitesse du bloc lorsqu’il est tombé de 1,6 m. On suppose que le système est initialement au repos.

OS 4ème 9
2012-2013 PG
Roulement sans glissement Un exemple courant de rotation est celui d’une balle ou d’une roue qui roule sur une surface. Soit une roue de rayon R en train de rouler sans glisser. Lorsqu’elle effectue un tour, elle couvre une distance égale à sa circonférence pendant un temps égal à une période T. Le module de la vitesse de son centre est donc
vc = (2πR/T) = ωR, et ac = Rω = Rα (condition de roulement sans glissement) (32)
où ω est à la vitesse angulaire de la roue. Or, la vitesse tangentielle vt d’un point de la circonférence par rapport au centre vaut également ωR par propriété. Le roulement est la combinaison d’une translation du centre et d’une rotation autour du centre. La vitesse d’un point quelconque de la circonférence est égale à la somme vectorielle : tc vvv
+= (33)
Question : Quelle est la vitesse au point le plus haut de la roue ? Quelle est la vitesse au point le plus bas de la roue ?
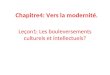
Théorème de Huygens-Steiner Soit un corps de masse m possédant un moment d’inertie noté ICM relativement à un axe passant par son CM. Le moment d’inertie I, par rapport à un autre axe parallèle au premier et situé à une distance d de cet axe, est donné par : I = ICM + mh2 (34) Développement :
Référence : Marc Séguin, Physique XXI Volume A Page 1Note de cours rédigée par : Simon Vézina
Chapitre 4.6 – Le théorème des axes parallèlesLe théorème des axes parallèles
Le théorème des axes parallèles permet d’évaluer l’inertie I d’un corps par rapport à un axede rotation quelconque à partir de l’inertie CMI du corps par rapport à un axe parallèlepassant par le centre de masse CM du corps et de la distance h entre les deux axes :
CM2 ImhI �
où I : Inertie de l’objet en rotation ( 2mkg � )m : Masse de l’objet en rotation (kg)h : Distance entre l’axe de rotation et un axe parallèle
passant par le centre de masse CM (m)
CMI : Inertie de l’objet en rotation autour d’un axepassant par le centre de masse CM et parallèle àl’axe de rotation ( 2mkg � )
m *
axecentremasse
axerotation
CM
h
En d’autres mots, on peut visualiser le théorème des axes parallèles grâce au schéma ci-dessous :
m *
axecentremasse
axerotation
CM
h
= m
axecentremasse
axerotation
CM h* m *
CM+I 2mh CMI
Preuve : (deux dimensions)
Considérons un corps dans le plan xy dedensité surfacique V quelconque et demasse m. Situons l’origine du systèmed’axe xy à l’endroit où le centre de masseCM est situé. Faisons tourner le corpsautour d’un axe A parallèle à l’axe z situéà la coordonnée Ax et Ay par rapport ànotre système d’axe xy. Définissons ladistance h entre l’axe de rotation et l’axepassant par le centre de masse CM :
� �mx
� �my
*CM Ax
AyA
h
2A
2A yxh �
(par Pythagore)

OS 4ème 10
2012-2013 PG
Exemple Calculer le moment d’inertie I d’un cadre rectangulaire de masse m, de largeur b et de longueur L par rapport à l’axe passant par la bordure de largeur b. Equilibre statique Quelles sont les conditions d’un équilibre statique ? Il faut que : ∑ = 0
iF et ∑ = 0
iM (35)
En effet, la 1ère condition ne suffit pas, car lorsque 2 forces de même module et de directions opposées agissent sur un objet, celui-ci va tourner à moins que les lignes d’action des forces ne soient confondues.
F
Puisque le corps est en équilibre statique, son
accélération angulaire est nulle autour de n’importe quel point. Pour cette raison, on peut calculer le moment de
force par rapport à n’importe quel point. Ainsi, suivant le nombre d’inconnues, il faudra utiliser le nombre d’équations adéquat. Finalement, pour déterminer les signes des différents moments de force, il est commode d’employer une convention qui consiste à désigner comme positif le sens horaire ou le sens antihoraire. F
−
Série d’exercices Moment d’inertie 1.- Détermine le moment d’inertie d’une tige mince homogène de masse M et de longueur L par rapport à un axe perpendiculaire à elle et passant par l’une des extrémités. 2.- Détermine le moment d’inertie d’une sphère pleine homogène de masse M et de rayon R par rapport à un axe passant par son centre. 3.- Dans une molécule d’eau, la distance entre les atomes d’hydrogène et d’oxygène est 9 . 10-11 m et les masses sont mo = 16 mH et mH = 1,67 . 10-27 kg. L’angle entre les 2 liaisons est de 105°. Trouve le moment d’inertie de la molécule par rapport à : a.- un axe orienté selon l’une des 2 liaisons H-O b.- un axe passant par l’atome d’oxygène et parallèle à la droite joignant les 2 atomes d’H. 4.- Aux extrémités d’une tige homogène de 6 kg, dont la longueur est de 1 m, on colle 2 sphères homogènes pleines de 10 cm de rayon ayant chacune une masse de 9 kg. On désire calculer le moment d’inertie de l’haltère ainsi formé par rapport à un axe perpendiculaire à la tige passant par son centre. Centre de masse 5.- Les masses et positions de 3 particules dans le plan xy sont les suivantes : 2 kg en (-2m, 3m) ; 3 kg en (-3m, 4m) et 5 kg en (3m, -1m). Quelle est la position du CM ? 6.- Où est situé le CM du système Terre-Lune par rapport au centre de la Terre ? 7.- Un homme de masse m1 = 60 kg se tient à l’arrière d’une barque immobile de masse m2 = 40 kg et de longueur 3 m. La barque, dont l’avant

OS 4ème 11
2012-2013 PG
est à 2 m du quai, peut se déplacer librement sur l’eau. Qu’arrive-t-il si l’homme marche vers l’avant de la barque ? (traiter la barque comme un objet homogène). Energie cinétique 8.- Calcule l’énergie cinétique instantanée d’une baguette mince de longueur L et de masse m en rotation autour d’une extrémité fixe. L 9.- Un cylindre de rayon r et de masse m tourne autour de son axe à 1200 tours/min. Calcule la force de freinage (tangentielle) nécessaire pour l’arrêter en 1800 tours (m = 20 kg, r = 0,25 m). Vitesse et accélération angulaire 10.- Une tige homogène de longueur L et de masse M pivote librement autour de l’une de ses extrémités a.- Quelle est l’accélération angulaire de la tige lorsqu’elle fait un angle θ avec la verticale ? b.- Quel est le module de l’accélération tangentielle de l’extrémité libre lorsque la tige est horizontale ? Indication : Le moment d’inertie d’une tige par rapport à une de ses extrémités est I = 1/3 M L2 11.- La roue du pédalier d’une bicyclette possède 20 dents. Elle est reliée par une chaîne à un engrenage arrière de 12 dents, lui-même solidaire de la roue arrière de 40 cm de rayon. a) Sachant que la roue du pédalier a un rayon de 14 cm, calculez le rayon de l’engrenage arrière. b) Sachant que les pédales sont à 25 cm de l’axe de rotation du pédalier, déterminez la vitesse linéaire qu’elles doivent avoir pour que la bicyclette roule sans glisser à 10 m/s.
12.- Un cylindre homogène de rayon R = 20 cm et d’une masse de 12 kg roule sans glisser vers le bas d’un plan incliné à 50° par rapport à l’horizontale. a) On désire déterminer l’accélération angulaire du cylindre ainsi que le coefficient de frottement statique minimal qui doit exister entre le cylindre et le plan. b) On désire calculer l’énergie cinétique acquise par le cylindre lorsqu’il roule à partir du repos sur une distance de 1,6 m mesurée le long du plan incliné. c) L’énergie mécanique est-elle conservée ?
13.- Calculez le module de l’accélération linéaire du centre de masse des corps suivants lorsqu’ils roulent sans glisser sur un plan incliné d’un angle θ par rapport à l’horizontale. Toutes les corps ont une masse m et un rayon R. a) un cylindre plein b) un cylindre creux c) une sphère pleine d) une sphère creuse (coquille sphérique)
Référence : Marc Séguin, Physique XXI Volume A Page 9Note de cours rédigée par : Simon Vézina
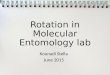
Situation 3 : Un cylindre qui roule. Un cylindrehomogène (R = 20 cm, m = 12 kg,
22 mkg24,0½ � mRI ) roule sans glisser vers lebas d’un plan incliné à 50o par rapport à l’horizontale(voir schéma ci-contre). On désire déterminer (a)l’accélération angulaire du cylindre ainsi que (b) lecoefficient de frottement statique minimal sP qui doitexister entre le cylindre et le plan.
axeVue enperspective
Rotation liée avec axe de rotation en mouvementsitué au CM
Schéma vue de côté : Schéma des forces : Décomposition des forces :
q50
axe
q50
axe
gm*f*
n*zD*
a*
� �my
� �mx
� �radz
Mg
fn
x
y
Mg sinT�Mg cosT�T�
Appliquons la 2ième loi de Newton sur le cylindre de masse m afin d’obtenir deux équationssachant que 0 ya :
amF ** ¦ � amfngm **** ��
Selon l’axe x : � � xmafmg �Tsin (1)
Selon l’axe y : � � 0cos � Tmgn (2)
Appliquons la 2ième loi de Newton version rotation sur le cylindre de moment d’inertie I :
zz IDW ¦ � zfnmg IDWWW ��
Selon l’axe z :
x � �TW sinmgrmgmg r � � � � �TW sin0 mgmg r � 0 mgW
x � �TW sinnrnn r � � � � �qr 180sinnRnW � 0 nW
x � �TW sinfrff r � � � � �q� 90sinfRfW � fRf W
Nous avons ainsi une 3ième équation :
zfnmg IDWWW �� � � � � � � � zIfR D �� 00
� zIfR D (3)Référence : Marc Séguin, Physique XXI Volume A Page 9Note de cours rédigée par : Simon Vézina
Situation 3 : Un cylindre qui roule. Un cylindrehomogène (R = 20 cm, m = 12 kg,
22 mkg24,0½ � mRI ) roule sans glisser vers lebas d’un plan incliné à 50o par rapport à l’horizontale(voir schéma ci-contre). On désire déterminer (a)l’accélération angulaire du cylindre ainsi que (b) lecoefficient de frottement statique minimal sP qui doitexister entre le cylindre et le plan.
axeVue enperspective
Rotation liée avec axe de rotation en mouvementsitué au CM
Schéma vue de côté : Schéma des forces : Décomposition des forces :
q50
axe
q50
axe
gm*f*
n*zD*
a*
� �my
� �mx
� �radz
Mg
fn
x
y
Mg sinT�Mg cosT�T�
Appliquons la 2ième loi de Newton sur le cylindre de masse m afin d’obtenir deux équationssachant que 0 ya :
amF ** ¦ � amfngm **** ��
Selon l’axe x : � � xmafmg �Tsin (1)
Selon l’axe y : � � 0cos � Tmgn (2)
Appliquons la 2ième loi de Newton version rotation sur le cylindre de moment d’inertie I :
zz IDW ¦ � zfnmg IDWWW ��
Selon l’axe z :
x � �TW sinmgrmgmg r � � � � �TW sin0 mgmg r � 0 mgW
x � �TW sinnrnn r � � � � �qr 180sinnRnW � 0 nW
x � �TW sinfrff r � � � � �q� 90sinfRfW � fRf W
Nous avons ainsi une 3ième équation :
zfnmg IDWWW �� � � � � � � � zIfR D �� 00
� zIfR D (3)

OS 4ème 12
2012-2013 PG
Equilibre statique 14.- Une échelle de longueur L et de poids P
est
posée sur un plancher rugueux et contre un mur sans frottement. Le coefficient de frottement statique du plancher est sµ = 0.6 a.- Détermine l’angle maximal θ entre le mur et l’échelle pour que l’échelle ne glisse pas b.- Détermine le module de la force exercée par le mur pour cette valeur de θ. 15.- Une noix est serrée entre les mâchoires d’un casse-noix. Les distances de la noix à l’axe et de l’axe aux poignées sont égales à 3 cm et 15 cm. La noix se brise si l’intensité des forces qui la compriment dépasse 400 N. Avec quelle intensité faut-il presser l’une contre l’autre les poignées du casse-noix pour casser la noix? 16.- La figure représente un avant-bras, sous la forme d’un modèle constitué d’une barre articulée autour d’un pivot (articulation du coude) et soutenue par un câble (biceps). Le poids de l’avant-bras (w sur la figure) est de 12 N et on peut considérer que ce poids est concentré au point indiqué. Trouver la tension T exercée par le biceps et la force E exercée par l’articulation du coude.
17.- Une personne tient une rame à 0,4 m de son point de fixation sur la barque. Si la rame touche l’eau à une distance moyenne de 1,40 m de l’attache, que vaut l’avantage mécanique?