Embed Size (px)
DESCRIPTION
oscilaciones
Citation preview

Capıtulo 1
Oscilaciones no-lineales
1.1. Introduccion
En este capıtulo analizaremos sistemas que se mueven en una sola dimension. Las leyes de Newtonestablecen que la dinamica responde a una ecuacion diferencial ordinaria de segundo orden
md2x
dt2= F (t, x, x) (1.1)
donde F es una fuerza que actua sobre la partıcula. Si F = F (t, x) no depende de la velocidad, elsistema es conservativo, y si ademas tampoco depende del tiempo F = F (x), decimos que el sistemaes autonomo.
En la naturaleza hay muchos sistemas mecanicos que presentan oscilaciones. El paradigma es el muelleque produce una fuerza recuperadora lineal
mx = −kx .
Esta ecuacion posee soluciones armonicas de la forma x(t) = A cos(ωt+ ϕ0) con ω =√k/m.
Sin embargo, los sistemas reales, en general responden a fuerzas que no son lineales. Vamos a examinarvarios casos en los que la ecuacion del movimiento adquiere terminos no lineales.
Muelle anarmonico
Por ejemplo, supongamos que k no fuese realmente una constante, sino una funcion que, paravalores pequenos de x puede expandirse en serie de Taylor
k(x) = k0 + k1x2 + ..
donde solo incluimos terminos pares para mantener la simetrıa x→ −x. Para valores pequenosde x podemos considerar que la aproximacion cuadratica es una buena aproximacion. En estecaso vemos que la ecuacion del movimiento no es lineal (ecuacion autonoma de Duffing).
mx = −k0x+ k1x3 (1.2)
Si k1 � k0 es natural suponer que las soluciones periodicas siguen existiendo, si bien es posibleque tengan otra periodicidad. El primer objetivo sera establecer de manera rigurosa la existenciade soluciones periodicas.
1

Dinamica efectiva
El caso unidimensional puede parecer simplificado. Sin embargo muchos problemas en mecanicatienen cantidades conservadas que sirven para eliminar grados de libertad. Consideremor porejemplo el caso de una partıcula capaz de moverse en un plano horizontal (x, y) sin rozamiento,y unida por un muelle al origen de coordenada. Si utilizamos coordenadas polares (r, φ) ellagrangiano entonces sera
L(r, φ) =1
2mr2 +
1
2mr2φ2 − V (r) . (1.3)
donde, para un muelle armonico, V (r) = 12kr
2. Claramente φ es una coordenada cıclica, con lo
que el momento canonico conjugado, pφ = mr2φ ≡ Lz, es una magnitud conservada. Es decir,podemos despejar
φ =Lzmr2
.
Si sustituimos esta igualdad en la ecuacion del movimiento para la variable r, vemos que elmovimiento radial responde a una fuerza efectiva no lineal
md2r
dt2= −kr +
L2z
mr3. (1.4)
El nuevo termino se denomina, termino centrıfugo, y actua como una fuerza radial repulsivacuando la partıcula se acerca al origen con Lz 6= 0.
Pendulo simple
Las ecuaciones del movimiento exactas de un pendulo simple son
θ = −(gl
)sen θ (1.5)
donde el angulo θ toma valores entre 0 y 2π. Se trata de una fuerza intrınsecamente no-lineal.Cuando el angulo θ es pequeno podemos expandir en serie de Taylor
θ = −(gl
)θ − 1
3!
(gl
)θ3 + ... (1.6)
y vemos que, en este lımite, este sistema se aproxima bien mediante un oscilador anarmonicodel tipo (1.2).
1.2. Oscilaciones en una dimension: solucion general.
Vamos a establecer un criterio para determinar, de manera fiable, cuando un sistema presenta solu-ciones oscilatorias.
En una dimension, todo sistema autonomo en el que las fuerzas no dependen de la velocidad es
conservativo. En efecto, el trabajo W =∫ baF (x)dx realizado por la fuerza F (x) entre dos puntos
cualesquiera es independiente del camino escogido, y por tanto siempre podra escribirse como F (x) =−V ′(x) para alguna funcion primitiva V . Multiplicando por x podemos rescribir la ecuacion (1.1) enla forma
d
dt
(1
2mx2 + V (x)
)= 0 . (1.7)
La energıa total es la primera constante de integracion
E =1
2mx2 + V (x). (1.8)
2

A partir de aquı, podemos despejar la variable x
x =
√2
m(E − V (x)) (1.9)
y, despues de separar variables, integrar
t(x) =
√m
2
∫ x
x0
dx√E − V (x)
(1.10)
E
V(x)
xx1 x2 x3
Figura 1.1: Potencial unidimensional arbitrario. Regiones admisibles y puntos de retorno.
La ecuacion (1.9) es el punto de partida para el analisis cualitativo de las trayectorias posibles. En lafigura (1.1) hemos dibujado un potencial generico V (x). Consideremos una trayectoria cuya energıatotal es E. Entonces podemos distinguir varias posibilidades
(a) x < x1. La region es excluida pues E < V (x).
(b) x1 < x < x2. En esta region, el movimiento es periodico. Los puntos x1 y x2 se denominan puntosde retorno. El periodo del movimiento viene dado por
τ(E) =√
2m
∫ x2(E)
x1(E)
dx√E − V (x)
(1.11)
donde los lımites de integracion son las raıces del radicando en (1.9), puesto que en ellos x = 0.Notese que aunque el integrando en (1.11) diverge, la integral definida existe.
(c) x2 < x < x3. La region queda excluida por el mismo motivo que en (a).
(d) Region admisible por la misma razon que en (b). El punto x3 es un punto de retorno. Si no hayotro punto de retorno a su derecha, la trayectoria sera no-compacta.
1.2.0.1 Oscilador armonico
Cualquier problema como el representado en la figura 1.1 implica un cierto movimiento oscilatorio. Elprototipo mas sencillo corresponde al oscilador armonico simple
V =1
2kx2. (1.12)
3

La conservacion T + V = 12mx
2 + 12kx
2 = E conlleva que E = 12kA
2 donde x = A es la amplitud enel punto de retorno.
t(x) =
√m
k
∫ x≤A
0
dx√A2 − x2
=
√m
k
∫ x≤A
0
d(x/A)√1− (x/A)2
=
√m
k
∫ y≤1
0
dy√1− y2
(1.13)
=
√m
karc sen (y)
=
√m
karc sen (x/A) (1.14)
e invertida para dar la conocida solucion
x(t) = A sen
(√k
mt
). (1.15)
El periodo de oscilacion vendra dado por
T = 4
√m
k
∫ 1
0
dx√1− x2
= 2π
√m
k(1.16)
que, a todas luces, es independiente de A.
1.2.1. El pendulo simple
Las ecuaciones del movimiento exactas de un pendulo ideal son
θ +(gl
)sen θ = 0 , (1.17)
donde el angulo θ toma valores entre 0 y 2π. Cuando el angulo θ no sea pequeno, los efectos no-linealesson importantes. El sistema es conservativo y por tanto tambien T + V = E. Si tomamos el origen depotencial en la posicion mas baja del pendulo θ = π/2 esta ecuacion es
1
2ml2θ2 −mgl cos θ = E
o, lo que es igual
θ2 = 2(gl
)(cos θ +
E
mgl
). (1.18)
En el angulo de retorno θM la velocidad se anula θ∣∣∣θM
= 0 y, por tanto,
E
mgl= − cos θM
que, sustituido en (1.18) lleva a
θ =
√2(gl
)(cos θ − cos θM )
4

= 2
√g
l
√(sen
θM2
)2
−(
senθ
2
)2
(1.19)
donde la identidad trigonometrica
cos θ = 1− 2 sen2 θ
2(1.20)
ha sido usada. Podemos despejar en (1.19)
dt =1
2
√l
g
dθ√(sen θM
2
)2 − (sen θ2
)2 (1.21)
e integrar para obtener t = t(θ). Hay dos tipos de movimiento posibles: (1) oscilatorio, y (2) circun-volucion completa. Discutiremos solo el primero, para el cual el pendulo oscila entre +θM y −θM . Sitomamos el origen de tiempos t = 0 para θ = 0 llegamos a
t(θ) =1
2
√l
g
∫ θ
0
dθ√sen2 θM
2 − sen2 θ2
. (1.22)
Para amplitudes de oscilacion muy pequenas θ ≤ θM << 1, podemos aproximar sen θ2 ∼
θ2 , y recuperar
a primer orden la expresion (1.13) con A = θM y√m/k =
√l/g.
1.2.1.1 Integrales elıpticas
Las integrales elıpticas se definen a partir de cocientes de polinomios de la forma∫A(x) +B(x)
√S(x)
C(x) +D(x)√S(x)
dx . (1.23)
Puede demostrarse que todas ellas pueden expresarse en terminos de funciones elementales y trestipo basicos de integrales elıpticas, llamados de primera, segunda y tercera especie, respectivamenteF (k, ϕ), F (k, ϕ) y Π(n;ϕ, k). La constante k se denomina modulo. 1
F (k, ϕ) =
∫ ϕ
0
1√1− k2 sin2 θ
dθ =
∫ senϕ
0
dy√1− k2y2
√1− y2
E(k, ϕ) =
∫ ϕ
0
√1− k2 sin2 θdθ =
∫ senϕ
0
√1− k2y2√1− y2
dy
Π(n;ϕ, k) =
∫ ϕ
0
dθ
(1− n sin2 θ)√
1− k2 sin2 θ=
∫ sinϕ
0
dy
(1− ny2)√
(1− y2)(1− k2y2)(1.24)
Las funciones elıpticas se definen invirtiendo las expresiones anteriores.
1.2.1.2 El pendulo simple y funciones elıpticas
Vamos a ver que la expresion exacta (1.22) para la evolucion del pendulo, puede expresarse en terminosde funciones elıpticas. Definamos el modulo
k = senθM2
1La primera funcion elıptica que se descubrio, fue E(k, ϕ) (paradojicamente, la de segunda especie), ya que aparecede manera natural al evaluar la longitud arco de una elipse. La teorıa de funciones elıpticas fue desarrollada por Jacobi .
5

ası como una variable angular normalizada φ que varıe para todas las trayectorias en el intervalo(−π/2, π/2) cuando θ lo hace en (−θM , θM ), mediante la sustitucion
sen
(θ
2
)= sen
(θM2
)senφ ≡ k senφ φ ∈ R (1.25)
Introduciendo este cambio en (1.21) y operando llegamos a
t(φ) =
√l
g
∫ φ
0
(1− sen2
(θM2
)sen2 φ
)−1/2dφ
=
√l
g
∫ φ
0
dφ√1− k2 sen2 φ
=
√l
gF (φ, k) (1.26)
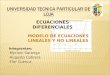
Es decir, t(φ) viene dada por la funcion F (φ, k) se denomina integral elıptica incompleta de primeraespecie, donde el modulo esta relacionado con el angulo maximo. Podemos resaltar la similitud con
-6 -4 -2 2 4 6Φ
-30
-20
-10
10
20
30
FHΦ,kL
k = 0.99999
k = 0.99
k = 0.7
Figura 1.2: Graficas de t(φ) = F (φ, k) para varios valores de k. La variable φ no es en realidad unangulo, pero su progresion representa el movimiento de ida y vuelta del pendulo entre sus amplitudesde retorno ±θM . Cuando k → 1 el periodo K(k) = F (π/2, k)→∞, diverge
(1.13) poniendo y = senφ. Obtenemos la forma canonica de esta integral
t(y) =
√l
g
∫ y≤1
0
dy√(1− y2)(1− k2y2)
. (1.27)
donde ahora y varıa en el intervalo (−1, 1) cuando φ ∈ R. La inversa de t(y), define otra funciony(t) = sn(
√gl t, k) que se denomina seno elıptico o seno de Jacobi, y es una generalizacion del seno
trigonometrico.
Podemos calcular el periodo τ . Como el movimiento es simetrico en torno a la vertical, la integral conlos lımites θ ∈ (0, θM ), ( ⇒ φ ∈ (0, π/2)⇒ y ∈ (0, 1) ) contribuye τ/4. Por eso, definiendo la integralelıptica completa K(k) = F
(π2 , k)
τ = 4
√l
gF
(π
2, sen
θM2
)= 4
√l
gK
(sen
θM2
)
6

= 4
√l
g
∫ 1
0
dy√(1− y2)(1− k2y2)
. (1.28)
-10 -5 5 10t
-1.0
-0.5
0.5
1.0
snHt,kD
k = 0.999
k = 0.3
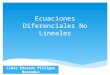
Figura 1.3: Funcion sn(t, k) que expresa el periodo de un pendulo libre.
1.3. Oscilaciones en el Espacio de Fases
V
E1
x
E2
x1
x2
V(x)
E>V(0)
E=V(0)
E<V(0) x
x
x.
En el proximo capıtulo veremos como podemos obtener informacion cualitativa acerca de un sistemamecanico si pasamo a la formulacion del mismo en variables del espacio de fases. Para un sistemamecanico generico unidimensional, como el representado por la ecuacion (1.1), estas son simplementela posicion y la velocidad tomadas como variables independientes x1 = x, x2 = x. Podemos escribirentonces la ecuacion del movimiento (1.1), como un sistema de ecuaciones de primer orden
dx1dt
= V1(x1, x2)
7

dx2dt
= V2(x1, x2) . (1.29)
Donde V 1 = x2 y V 2 = F (x1, x2) en este caso particular. Toda solucion x(t) de las ecuciones del
θ1
θ=πθ=−π
separa
triz
θ2
Figura 1.4: Flujo en el espacio de fases de un pendulo simple.
movimiento (1.1) se eleva a una solucion de (1.29) Por ejemplo, en el caso de un oscilador armonicoF (x) = −ω2x1 y la solucion x(t) = A cos(ωt) se traduce en una familia de elipses en el espacio defases
x1(t) = A cos(ωt) ; x2(t) = −Aω sen(ωt) . (1.30)
Analogamente, podemos introducir variables de espacio de fases para un pendulo simple θ1 = θ, θ2 = θ.El espacio de fases contiene mas informacion que solamente las soluciones oscilatorias, como se ve dela figura (1.4)
1.4. Teorıa de Perturbaciones
Carecemos pues de un conjunto sistematico de reglas con las que abordar la resolucion de problemasno lineales. En esta seccion estudiaremos el uso de metodos de aproximacion sucesiva a las solucion.Esta estrategia es valida cuando los terminos no lineales pueden considerarse como una perturbacionpequena.
Es decir, consideremos un sistema unidimensional no-lineal descrito por la ecuacion
x+ ω20x+ αf(x, x) = 0. (1.31)
En esta ecuacion f es una funcion analıtica de x y x y α es un parametro adimensional pequeno. Elmetodo de la expansion perturbativa consiste en proponer una solucion en forma de serie de potencias
x(t) = x0(t) + αx1(t) + α2x2(t) + α3x3(t) + ... (1.32)
Si α es suficientemente pequeno, es plausible suponer que esta serie convergera.
Para obtener las sucesivas funciones x0(t), x1(t), ... sustituiremos la expansion en (1.31) y agrupandoterminos con igual potencia de α obtendremos un conjunto de ecuaciones diferenciales que pueden serintegradas de forma recursiva.
Como veremos en breve, aparece un problema en forma de terminos seculares que crecen linealmentecon t y destruyen la convergencia de la serie obtenida. La eliminacion de dichos terminos involucrauna informacion fısicamente relevante.
8

1.4.1. Ejemplo: el oscilador armonico perturbado
Sea una partıcula que se mueve en un potencial asimetrico V (x)
V (x) =1
2k1x
2 +1
3k2x
3 (1.33)
La ecuacion del movimiento esx+ ω2
0x+ αx2 = 0 (1.34)
donde ω0 =√k1/m y α = k2/m. Introduciendo la expansion (1.32) en (1.34) obtenemos una serie en
potencias de α. La anulacion para cualquier α exige que cada coeficiente sea igual a cero independien-temente. De esta manera, la ecuacion del movimiento se escinde en una torre de ecuaciones, una paracada coeficiente
O(α0) → x0 + ω20x0 = 0
O(α1) → x1 + ω20x1 + x20 = 0
O(α2) → x2 + ω20x2 + 2x0x1 = 0.
......
(1.35)
Ahora debemos prodeceder de forma iterativa. Comenzando por el orden α0, la solucion de (1.35) esprecisamente la de la ecuacion lineal sin perturbar
x0(t) = A cos(ω0t+ δ). (1.36)
Por simplicidad vamos a ajustar δ = 0. Entonces podemos introducir este resultado en (1.35) yobtenemos
x1 + ω2x1 = −A2 cos2 ω0t = −1
2A2(1 + cos 2ω0t) (1.37)
La solucion general de esta ecuacion consta por una parte de la solucion general de la ecuacionhomogenea A cos(ω0t) y, por otra, de una solucion particular de la ecuacion inhomogenea. Vamos aprobar con
x1(t) = B cos(2ω0t) + C (1.38)
que, al sustituir en (1.35) resulta ser
−3ω20B cos(2ω0t) + ω2
0C = −1
2A2(1 + cos 2ω0t), (1.39)
es decir
B =A2
6ω20
, C = − A2
2ω20
. (1.40)
De este modo llegamos a la solucion correcta a primer orden en α
x(t) = x0(t) + αx1(t)
= A cosω0t+ α
(A2
6ω20
)(cos 2ω0t− 3). (1.41)
Vemos, como consecuencia de la no-linealidad, se ha generado el segundo armonico de la frecuenciafundamental ω0 → 2ω0. Procederemos ahora a calcular el termino de orden α2, con ayuda de x0 y x1calculados.
x2 + ω20x2 = −2A cosω0t
A2
6ω20
(cos 2ω0t− 3)
= − A3
6ω20
cos 3ω0t+5A3
6ω20
cosω0t. (1.42)
9

donde hemos usado la siguiente identidad trigonometrica 2
2 cosω0t cos 2ω0t = cos 3ω0t+ cosω0t (1.43)
A la hora de buscar una integral particular de (1.42) debemos tener en cuenta que la funcion cosω0tque aparece en el miembro derecho aparece en la solucion general de la ecuacion homogenea. En estecaso debemos considerar el producto de esta funcion por t
x2(t) = D cos 3ω0t+ Et senω0t+ F. (1.44)
Sustituyendo en (1.42) encontramos(A3
6ω20
− 8ω20D
)cos 3ω0t+
(2Eω0 −
5A3
6ω20
)cosω0t+ ω2
0F = 0. (1.45)
Entonces
D =A3
48ω40
, E =5A3
12ω30
, F = 0 (1.46)
es decir
x2(t) =A3
48ω40
(cos 3ω0t+ 20ω0t senω0t). (1.47)
Sumando todas las contribuciones obtenemos
x(t) = x0(t) + αx1(t) + α2x2(t)
= A cosω0t+ α
(A2
6ω20
)(cos 2ω0t− 3)
+α2 A3
48ω40
(cos 3ω0t+ 20ω0t senω0t) + ... (1.48)
1.4.1.1 Terminos seculares
El termino 20ω0t senω0t en ((1.48)) es conocido como termino secular. En primer lugar, este terminoes contradictorio con la naturaleza oscilatoria del movimiento. Pero ademas, el crecimiento sin lımitesdel mismo hace que la correccion de segundo orden acabe siendo mayor que la solucion de orden cero.Esto invalida la teorıa de perturbaciones, a menos que encontremos una manera de volver a hacerlaconsistente. La observacion es suponer que el efecto de la no-linealidad afecta tambien a la frecuenciade oscilacion ω0 → ω0 + αβ1. Entonces, una expansion en serie de potencias de α
sen((ω0 + αβ1)t) = sen(ω0t) + β1t cos(ω0t) + ... (1.49)
es capaz de producir terminos del mismo tipo que el termino secular ofensivo y, ajustando β1, even-tualmente cancelarlos.
El metodo de Bogoliugoff-Kryloff-Lindstedt implica generalizar el ansatz perturbativo (1.32) e incluir,ademas, una expansion de la frecuencia ω de la forma
ω20 = ω2 + αβ1 + α2β2 + ... = ω2 +
∞∑n=1
αnβn (1.50)
Las constantes βn se determinan por la condicion de que los terminos seculares desaparezcan
2el truco general para obtener este tipo de identidades es escribir cosω0t = 12
(eiω0t + e−iω0t) y operar.
10

Por ejemplo, si introducimos esta expansion en la ecuacion (1.34), en lugar del sistema (1.35)-(1.35)encontramos el siguiente
x0 + ω2x0 = 0 (1.51)
x1 + ω2x1 = −x20 − β1x0 (1.52)
x2 + ω2x2 = −2x0x1 − β2x0 − β1x1. (1.53)
con las condiciones inicialesx(0) = A , x(0) = 0 . (1.54)
De la ecuacion (1.51) obtenemos la solucion a orden cero (generatriz)
x0(t) = A cosωt (1.55)
que podemos sustituir en (1.52) para llegar a
x1 + ω2x1 = −A2 cos2 ωt− β1A cosωt
= −1
2A2(cos 2ωt+ 1)− β1A cosωt. (1.56)
El termino cosωt en el miembro de la derecha, que es el que aparece en la solucion de la ecuacionhomogenea, es el que genera el termino secular indeseado. Ahora podemos eliminarlo ajustando sucoeficiente a cero, lo cual implica
β1 = 0, (1.57)
con lo que (1.56) se reduce a
x1 + ω2x1 = −1
2A2(cos 2ωt+ 1) (1.58)
cuya integral particular es
x1(t) =1
6
(A2
ω2
)(cos 2ωt− 3), (1.59)
Ahora, para obtener la solucion a segundo orden sustituimos x0 y x1 en la ecuacion (1.53).
x2 + ω2x2 = −β2A cosωt− A3
3ω2cosωt(cos 2ωt− 3)
=
(−Aβ2 +
5A3
6ω2
)cosωt− A3
6ω2cos 3ωt (1.60)
donde la siguiente identidad trigonometrica ha sido usada
cosωt+ cos 3ωt = 2 cos 2ωt cosωt. (1.61)
De nuevo, requerimos que se anule el coeficiente del termino cosωt, que es el que dara lugar a untermino secular
−Aβ2 +5A3
6ω2= 0 ⇒ β2 =
5
6
A2
ω2(1.62)
y la ecuacion (1.60) queda
x2 + ω2x2 = − A2
6ω2cos 3ωt.
cuya solucion es
x2(t) =A3
48ω4cos 3ωt (1.63)
11

Por fin, la solucion completa, hasta segundo orden es
x(t) = A cosωt+A
6
(αA
ω2
)(cos 2ωt− 3) +
A
48
(αA
ω2
)2
cos 3ωt (1.64)
que esta libre de terminos seculares. La frecuencia vemos que a segundo orden ha sufrido una renor-malizacion
ω20 = ω2 + α2 5A2
6ω2+ .. (1.65)
es decir
ω = ω0
(1 + α2 5A2
6ω4
)−1/2' ω0
(1− α2 5A2
12ω4+O(α4)
)' ω0
(1− 5
12
(αA
ω20
)2
+O(α4)
)(1.66)
1.4.1.2 Parametro de expansion: ¿que significa pequeno?
Una vez obtenida la solucion (1.64) observamos que el verdadero parametro perturbativo es
δ =αA
w2. (1.67)
La consistencia de la expansion perturbativa depende de que este parametro sea pequeno δ � 1.
Una manera de entender esto recordar que siempre debemos comparar magnitudes con identicasdimensiones. Por ejemplo, en la ecuacion (1.34) lo correcto es comparar los dos terminos de fuerza. Elcociente entre estos dos terminos, evaluados sobre una solucion de amplitud x ∼ A da
αA3
ω20A
2=αA
ω20
∼ δ .
Cuando este numero sea pequeno, la importancia del termino no lineal sera realmente subdominante.
Un atajo de uso frecuente que permite llegar a esta conclusion es comprobar que δ es la unica com-binacion adimensional que podemos formar con los parametros dimensionales A,α y ω0 que entranen el problema. Un parametro dimensional siempre puede hacerse grande o pequeno cambiando deunidades (p. ej. 0.01 m = 10 mm). Por el contrario, el requisito δ � 1, que establece la validez delregimen perturbativo, es independiente del sistema de unidades.
Ahora vemos que el regimen perturbativo puede alcanzarse en varios lımites. Uno, el que conside-ramos originalmente, es disminuir α → 0. Pero tambien es posible hacerlo trabajando con pequenasamplitudes A→ 0 o con una constante recuperadora alta k →∞⇒ ω0 →∞.
1.5. Metodo variacional: el metodo de Ritz
En esta seccion vamos a ver como el Principio de Mınima Accion no es solamente una forma elegantede obtener las ecuaciones del movimiento, sino que tambien puede usarse como metodo de calculo enmecanica clasica. De hecho este formalismo es bastante comun en el contexto de la mecanica clasica,donde se usa para determinar energıas aproximadas de estados fundamentales.
12

Como sabemos, este principio establece que la accion clasica tiene un valor extremal sobre las solucionesa las ecuaciones del movimiento
δS = δ
∫ t1
t0
L(x, x, t)dt. (1.68)
En esta expresion el sımbolo δ significa una variacion virtual, es decir cualquier cambio en las trayec-torias x(t)→ x′(t) = x(t) + δx(t) compatible con las condiciones de contorno δx(t0) = δx(t1) = 0.
La idea basica en el metodo de aproximacion de Ritz consiste en restringir las variaciones posibles aun subespacio vectorial generado por una base finita de funciones {ei(t)}
x(t) =
n∑i=1
aiei(t) (1.69)
todas las cuales satisfacen las condiciones de contorno apropiadas. Esta solucion de prueba debesustituirse en la funcional de accion S que, despues de integrarse se convertira en una funcion de losparametros ai. El mınimo de la accion se alcanza en un punto estacionario
∂S
∂ai= 0. . (1.70)
Este conjunto de ecuaciones basta para fijar los coeficientes ai y por ende la mejor funcion aproximadaq(t) dentro de este subespacio.
1.5.0.3 Ejemplo: el pendulo simple
Usaremos el metodo de Ritz para obtener una solucion aproximada a la ecuacion del movimiento deun pendulo simple
θ +g
lsen θ = 0. (1.71)
Cuando θ es pequeno, y si pretendemos ser exactos hasta orden cubico llegamos a un caso particularde la ecuacion autonoma de Duffing
θ + ω20θ + εθ3 = 0 (1.72)
donde
ω0 =
√g
ly ε = − 1
3!ω20
. (1.73)
Esto puede ser derivado de un lagrangiano aproximado como el siguiente
L =1
2θ2 − ω2
0
2θ2 − ε
4θ4. (1.74)
Experimentalmente, el movimiento es periodico con un cierto T = 2π/ω., y usamos este hecho paraescoger t1 y t2 convenientemente
t1 = 0 , t2 =2π
ω(o sea un periodo completo despues) (1.75)
Para las condiciones de contorno escogemos que la trayectoria empiece y acabe en la base
θ(0) = θ
(2π
ω
)= 0. (1.76)
Empezaremos con una familia unidimensional de funciones de prueba
θ(t) = a1 senωt (1.77)
13

que satisfacen las condiciones de contorno para todo valor de a1. El siguiente siguiente paso consisteen calcular la integral de accion S como funcion de este parametro
S =
∫ t2
t1
L(θ, θ)dt
=
∫ 2π/ω
0
[1
2a21(ω2 cos2 ωt− k sen2 ωt) +
1
4kεa41 sen4 ωt
]dt
=1
2
a21π
ω(ω2 − ω2
0) +3πεa4116ω
(1.78)
Ahora podemos fijar a1 requiriendo
∂S
∂a1=a1π
ω(ω2 − ω2
0) +3πεa31
4ω= 0. (1.79)
Esto relaciona la amplitud de la oscilacion con la frecuencia. Aunque el espıritu de la aproximacionsugiere despejar a1, es mas natural obtener ω2 como funcion de la amplitud a1
ω2 = ω20(1 +
3
4
εa21ω20
). (1.80)
Para la siguiente aproximacion adoptamos la combinacion lineal
θ = a1 senωt+ a2 sen 3ωt (1.81)
motivada por la siguiente identidad algebraica
sin3 ωt =1
4sin 3ωt+
3
4sinωt . (1.82)
Para esta familia bi-parametrica de funciones de prueba conduce a la siguiente funcion de (a1, a2)para la integral de accion
S(a1, a2) =πω
2[a21 + 9a22]− πω2
0
2ω[a21 + a22]− ε
4
π
ω
[3
4a41 − a31a2 + 3a21a
22 +
3
4a42
](1.83)
De la ecuacion (1.70) obtenemos
3ε(−a31 + a21a2 − 2a1a22) + 4
(ω2 − ω2
0
)a1 = 0 (1.84)
ε(a31 − 6a21a2 − 3a32) + 4(9ω2 − ω2
0
)a2 = 0 (1.85)
Naturalmente la solucion analıtica de este sistema es posible que no exista. Generalmente sera prefe-rible buscar una solucion numerica para cada valor de ω0 y ε.
14

1.6. Bibliografıa de este capıtulo
Acerca del pendulo hay infinidad de textos porque este sistema presenta conexiones insospecha-das con muchas ramas de la fısica, la tecnologıa y las matematicas.
- Gregory L. Baker y James A. Blackburn, The Pendulum, a case study in physics. Oxford, 2005
- L.P. Pook, Understanding Pendulums, Springer, 2011.
- Moshe Gitterman,, The chaotic Pendulum, World Scientific. 2010
Una introduccion muy recomendable a funciones elıpticas se encuentra en el artıculo ”Whyellipses are not elliptic curves”, por Adrian Rice y Ezra Brown, que puede encontrarse en internettecleando el tıtulo.
Para profundizar:
J.V. Armitage y W.F. Eberlein, Elliptic Function, Cambridge University Press. 2006.
La teorıa de perturbaciones puede ampliarse en libros como
- L. N. Hand y F.D. Finch, Analytical Mechanics, Cambdridge. Capıtulo 10.
- O.L. De Lange y J. Pierrus, Solved Problems in Analytical Mehcanics Oxford, Cap 13.
- R. Douglas Gregory, Classical Mechanics, Cambridge, Cap 8.
15