Embed Size (px)
Citation preview

OT3OS1
07.11.2017.

Definicije

Funkcija prenosa
• Funkcija prenosa se definiše kao količnik z
transformacija odziva i pobude.
• Za LTI sistem:
Z Z Z
k
n
n
y n h k x n k
y n h n x n
Y z H z X z
Y zH z
X z
H z h n z
Funkcija prenosa
• Veliku grupu sistema čine sistemi koji se
mogu predstaviti diferencnim jednačinama
sa konstantnim koeficijentima.
• Ovi sistemi mogu biti sistemi sa
beskonačnim impulsnim odzivom (IIR) ili
sistemi sa konačnim impulsnim odzivom
(FIR). (beskonačno/konačno se odnosi na
dužinu impulsnog odziva).

Funkcija prenosa
0
1
MM k
kN M k
NN N k
k
k
b z
H z z
z a z
IIR FIR
0
M
k
k
y n b x n k
0
Mk
k
k
y n b z x n
Z Z
0
Mk
k
k
H z b z
0
1 MM k
kMk
H z b zz
Diferencna jednačina
Funkcija prenosa
0 1
M N
k k
k k
y n b x n k a y n k
0 1
M Nk k
k k
k k
y n b z x n b z y n
Z Z Z
1
0
1
1
1
Mk
k
k
Nk
k
k
b zQ zY z
H zX z P z
a z

Nule i polovi funkcije prenosaIIR FIR
N
k
k
M
k
k
MN
N
k
k
k
M
k
k
k
pz
qz
zH
zp
zq
HzH
1
1
0
1
1
0
1
1
M
k
kM
M
k
k qzz
HzqHzH1
0
1
1
0
11
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Ima
gin
ary
Pa
rt
-1 -0.5 0 0.5 1 1.5 2
-1
-0.5
0
0.5
1
32
Real Part
Imagin
ary
Part
Trivijalni
polovi
Stabilnost i kauzalnost sistema
• Da bi sistem bio stabilan oblast konvergencije
mora obuhvatati jedinični krug
• Da bi sistem bio kauzalan oblast konvergencije
mora se nalaziti izvan kruga koji prolazi kroz pol
najudaljeniji od koordinantnog početka
Za kauzalni linerani vremenski invarijantni sistem
navedena dva uslova će biti zadovoljena ako i
samo ako svi polovi funkcije prenosa leže unutar
jediničnog kruga kompleksne z ravni

Frekvencijski odziv
j j n
n
H e h n e
j
j
z eH e H z
j j j
R IH e H e jH e
Furijeova transformacija impulsnog odziva
Veza sa z transformacijom
Kompleksna funkcija!!!

Frekvencijski odziv
Amplitudska karakteristika
Fazna karakteristika
exp argj j jH e H e j H e
jjH e e M
2 2
j j j
R IH e H e H e
M
1arg tan
j
Ij
j
R
H eH e
H e
Pojačanje, slabljenje...
Pojačanje
Slabljenje
Grupno kašnjenje
20log dBg M
20log dBa M
d
d

Uticaj rasporeda nula i polova na
karakteristike sistema
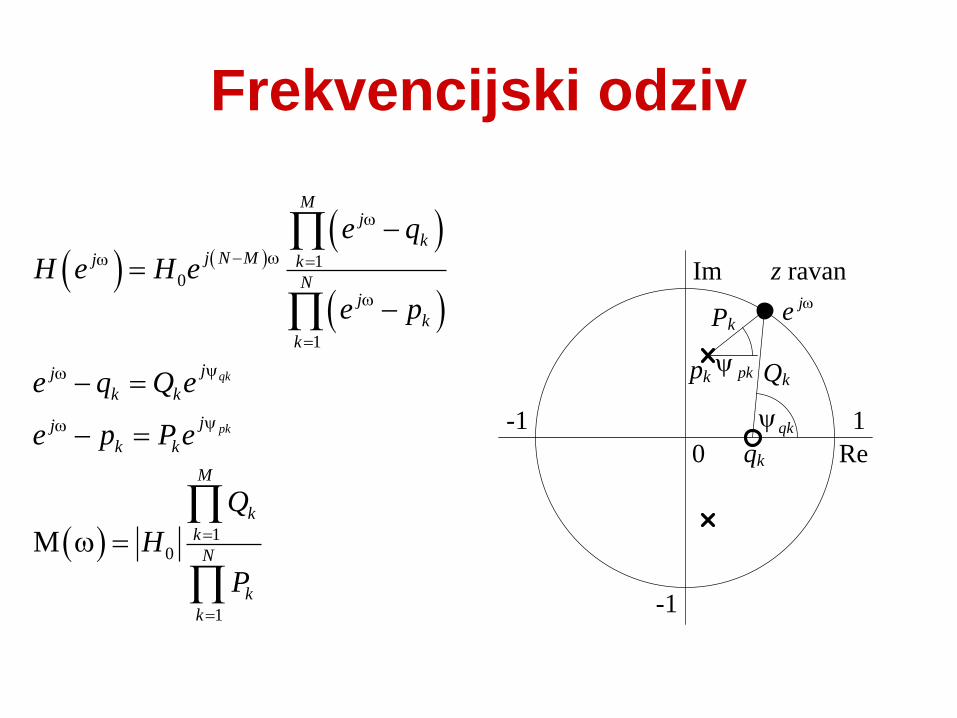
Frekvencijski odziv
10
1
10
1
M
qk
pk
Mj
kj N Mj k
Nj
k
k
jj
k k
jj
k k
M
k
k
N
k
k
e q
H e H e
e p
e q Q e
e p P e
Q
H
P
0
1-1
-1
Re
Im z ravan
Pk
Qk
qk
pk
je
pk
qk

Uticaj položaja nula i polova
• Nula ili pol će imati najveći uticaj na frekvencije koje
odgovaraju delu jediničnog kruga koji je najbliži nuli ili
polu.
• Sa približavanjem nule ili pola jediničnom krugu uticaj na
karakteristiku raste.
• Za pol čiji je modul pk približno 1, amplitudska
karakteristika ima lokalni maksimum
• Za nulu čiji je modul qk približno 1, amplitudska
karakteristika ima lokalni minimum.
Uticaj položaja nula i polova
• Za nulu na jediničnom krugu =k amplitudska
karakteristika ima nulu, a faza ima skok od radijana.
• Ako neki od polova funkcije prenosa leži na jediničnom
krugu za =k amplitudska karakteristika ima
beskonačnu vrednost.
• Polovi ili nule koji se nalaze u koordinatnom početku ne
utiču na amplitudsku karakteristiku, već samo na faznu.
Zbog toga se ove nule i polovi smatraju trivijalnim.

Frekvencijski odziv - primer
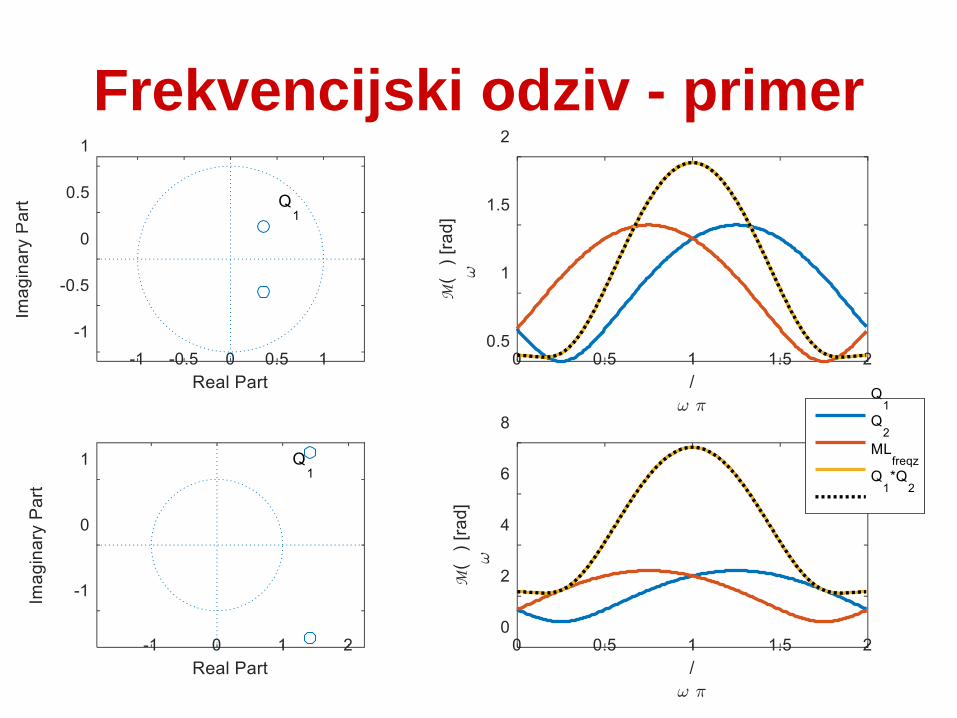
Frekvencijski odziv - primer
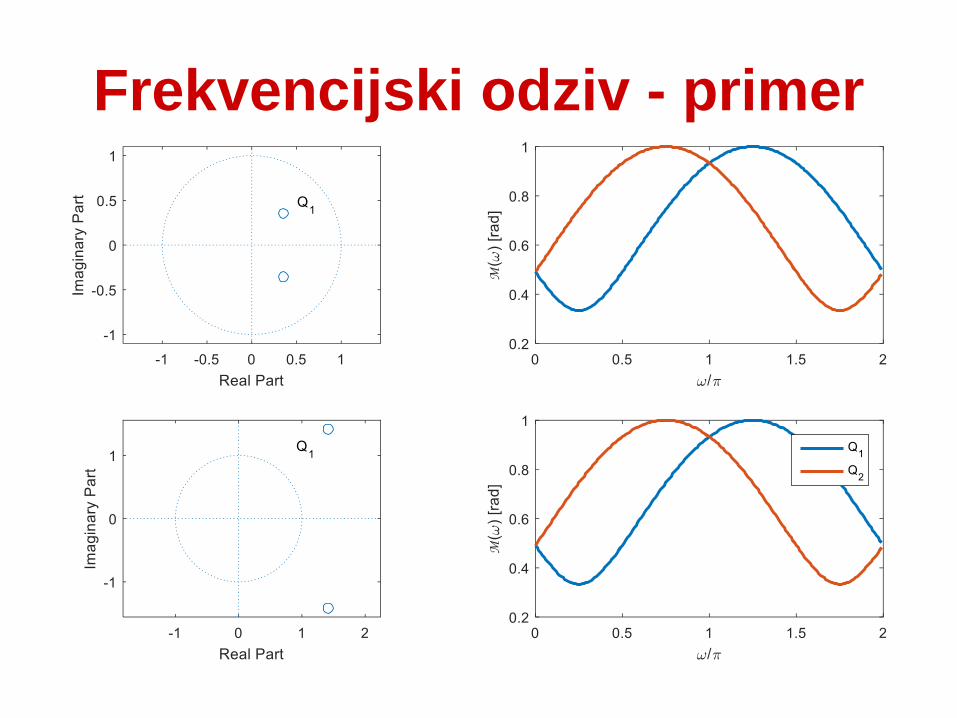
Frekvencijski odziv - primer

Frekvencijski odziv - primer

Frekvencijski odziv - primer

Idealni filtar
0
0
1, ,
0,
sin1
2
c
c
cj
F
c
cj n
F
H e
nh n e d
n
, ,
0,
sin1
2
d
c
d
c
j n
cj
LF
c
c dj n n
LF
d
eH e
n nh n e d
n n
Nulta
fazna k-ka
Linearna
fazna k-ka

Idealni diferencijator
,
cos
j
dif
dif
H e j
nh n
n

Idealni Hilbertov transformator
2
, 0 ,
, 0
sin2 2
, 0,
0, 0
j
H
H
jH e
j
n
h n nn
n

Realno ostvarive karakteristike
diskretnih LTI sistema
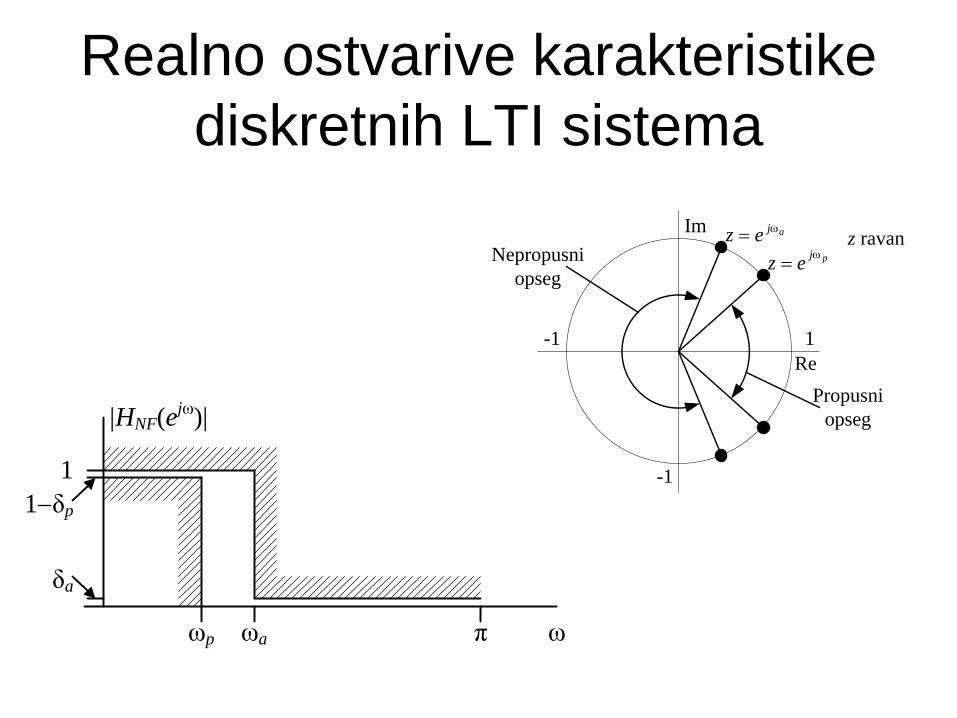
Realno ostvarive karakteristike
diskretnih LTI sistema
ωaωp
δa
1δp
1
ωπ
|HNF(ejω)|
1-1
-1
Re
Imz ravan
pjez
ajez
Propusni
opseg
Nepropusni
opseg
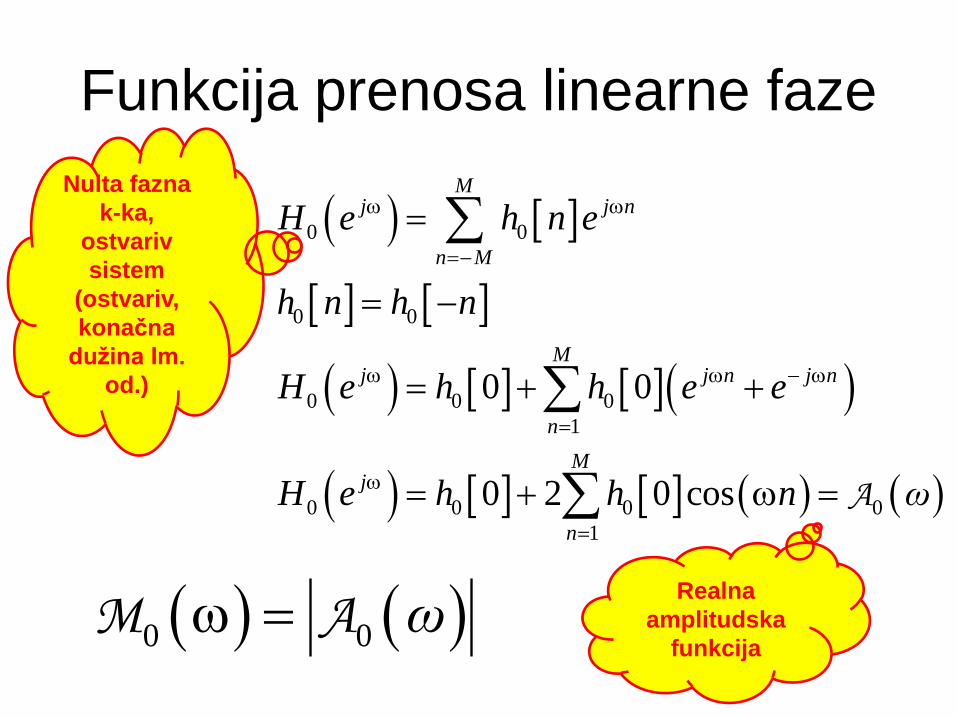
Funkcija prenosa linearne faze
0 0
0 0
0 0 0
1
0 0 0 0
1
0 0
0 2 0 cos
Mj j n
n M
Mj j n j n
n
Mj
n
H e h n e
h n h n
H e h h e e
H e h h n ω
A
Nulta fazna
k-ka,
ostvariv
sistem
(ostvariv,
konačna
dužina Im.
od.)
Realna
amplitudska
funkcija 0 0 ω M A
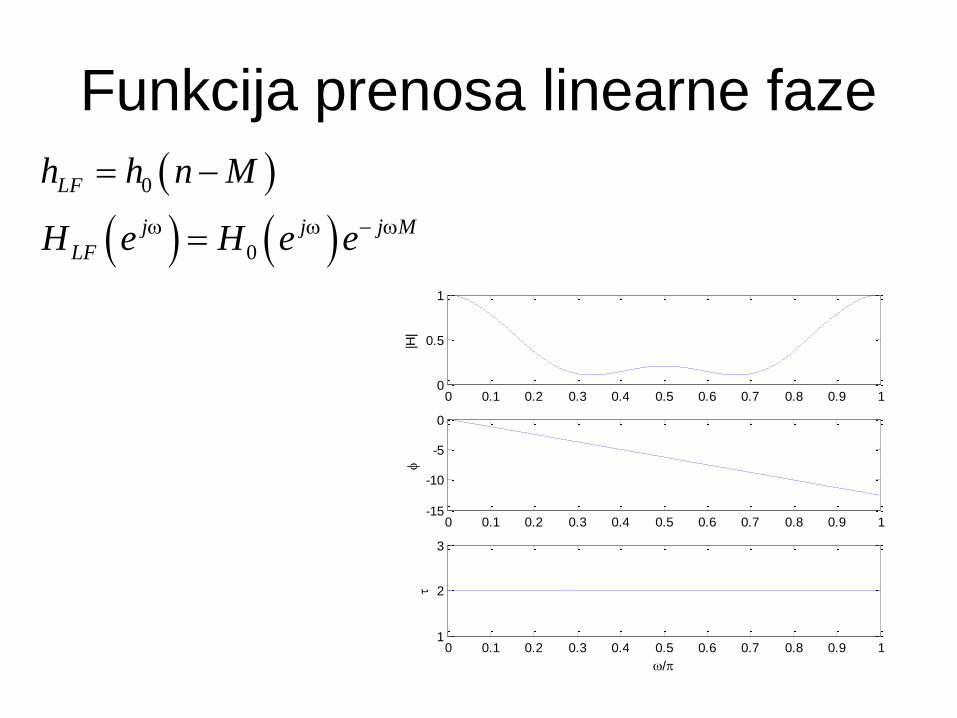
Funkcija prenosa linearne faze
0
0
LF
j j j M
LF
h h n M
H e H e e
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
|H|
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 11
2
3
/
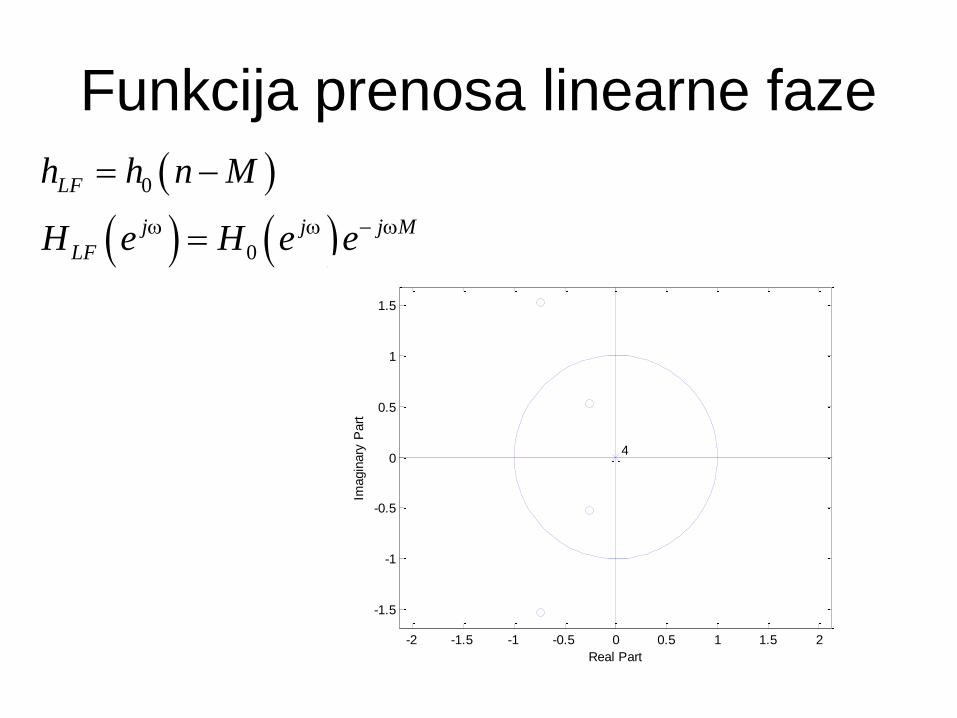
Funkcija prenosa linearne faze
0
0
LF
j j j M
LF
h h n M
H e H e e
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-1.5
-1
-0.5
0
0.5
1
1.5
4
Real Part
Imagin
ary
Part

Filtar svepropusnik, all-pass

Filtar minimalne faze
• Stabilan filtar: svi polovi unutar jediničnog
kruga
• Položaj nula ne utiče na stabilnost
• Sistem kod koga su sve nule unutar
jediničnog kruga naziva se sitem
minimalne faze

Zadatak 1
a) Za filtar za usrednjavanje (moving average)
dužine 5 nacrtati impulsni odziv i
karakteristiku slabljenja filtra.
b) Odrediti ukupan ekvivalentni impulsni odziv
i karakteristiku slabljenja za kaskadnu vezu
dva identična filtra data pod a).

Zadatak 1 – rešenje1
h=[1 1 1 1 1]/5;
figure,stem([0:4],h),xlabel('n'),ylabel('h(n)');
[H,w]=freqz(h,1,1000);
figure,plot(w/pi,-20*log10(abs(H))),
xlabel('\omega/\pi'),ylabel('Slabljenje [dB]');
figure,zplane(h);
angle(roots(h))/pi
H_na_2=H.*H;
figure,plot(w/pi,-20*log10(abs([H H_na_2])));
xlabel('\omega/\pi’);
ylabel('Slabljenje [dB]'),legend('|H|','|H|^2');
hkv=conv(h,h)
figure,stem([0:8],hkv),xlabel('n'),ylabel('hkv(n)');
[Hkv,w]=freqz(hkv,1,1000);
figure,plot(w/pi,-20*log10(abs([Hkv H_na_2])));
xlabel('\omega/\pi');
ylabel('Slabljenje [dB]'),legend('|Hkv|','|H|^2');
figure,zplane(hkv);
angle(roots(hkv))/pi
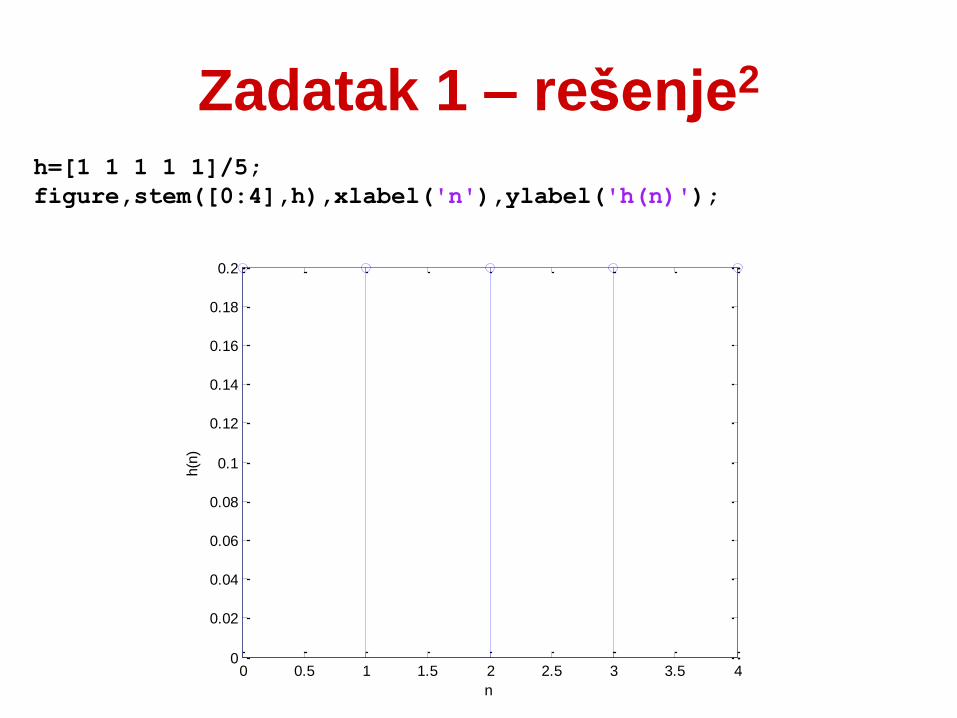
Zadatak 1 – rešenje2
0 0.5 1 1.5 2 2.5 3 3.5 40
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
n
h(n
)
h=[1 1 1 1 1]/5;
figure,stem([0:4],h),xlabel('n'),ylabel('h(n)');
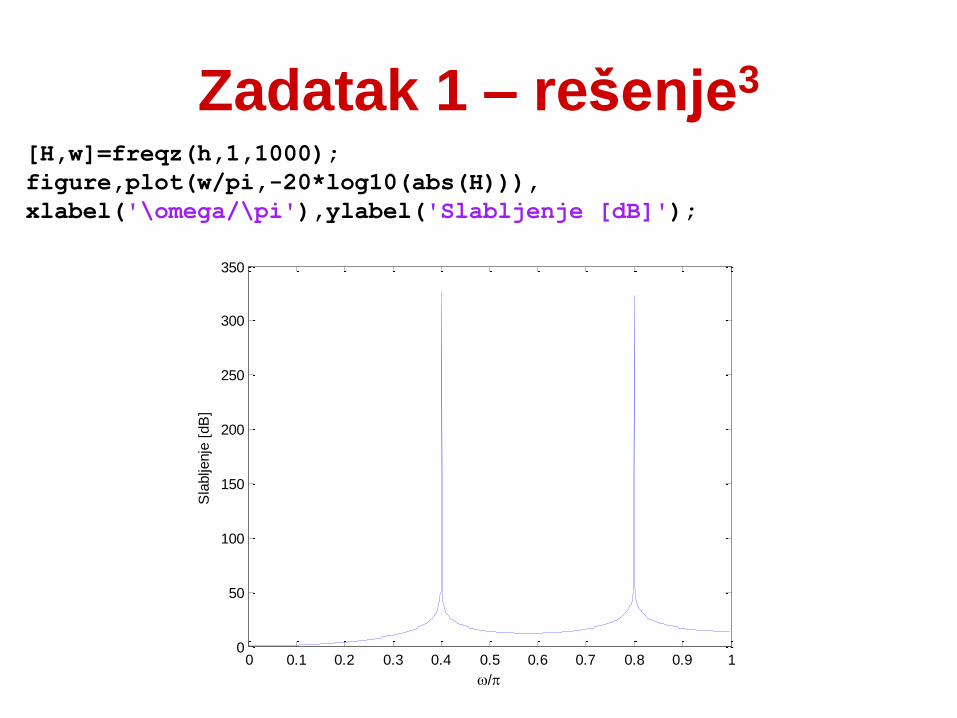
Zadatak 1 – rešenje3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
50
100
150
200
250
300
350
/
Sla
blje
nje
[dB
]
[H,w]=freqz(h,1,1000);
figure,plot(w/pi,-20*log10(abs(H))),
xlabel('\omega/\pi'),ylabel('Slabljenje [dB]');

Zadatak 1 – rešenje4
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
4
Real Part
Imagin
ary
Part
ans =
0.4000
-0.4000
0.8000
-0.8000
-0.8000
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
50
100
150
200
250
300
350
/
Sla
blje
nje
[dB
]
figure,zplane(h);
angle(roots(h))/pi

Zadatak 1 – rešenje5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
100
200
300
400
500
600
700
/
Sla
blje
nje
[dB
]
|H|
|H|2
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
0.5
1
1.5
2
2.5
3
/
Sla
blje
nje
[dB
]
|H|
|H|2
H_na_2=H.*H;
figure,plot(w/pi,-20*log10(abs([H H_na_2])));
xlabel('\omega/\pi');
ylabel('Slabljenje [dB]'),legend('|H|','|H|^2');

Zadatak 1 – rešenje6
0 1 2 3 4 5 6 7 80
0.05
0.1
0.15
0.2
0.25
n
hkv(n
)hhhkv
hkv =
0.0400 0.0800 0.1200 0.1600 0.2000 0.1600 0.1200 0.0800 0.0400
hkv=conv(h,h)
figure,stem([0:8],hkv),xlabel('n'),ylabel('hkv(n)');

Zadatak 1 – rešenje7
2HH kv
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
100
200
300
400
500
600
700
/
Sla
blje
nje
[dB
]
|Hkv|
|H|2
[Hkv,w]=freqz(hkv,1,1000);
figure,plot(w/pi,-20*log10(abs([Hkv H_na_2])));
xlabel('\omega/\pi');
ylabel('Slabljenje [dB]'),legend('|Hkv|','|H|^2');
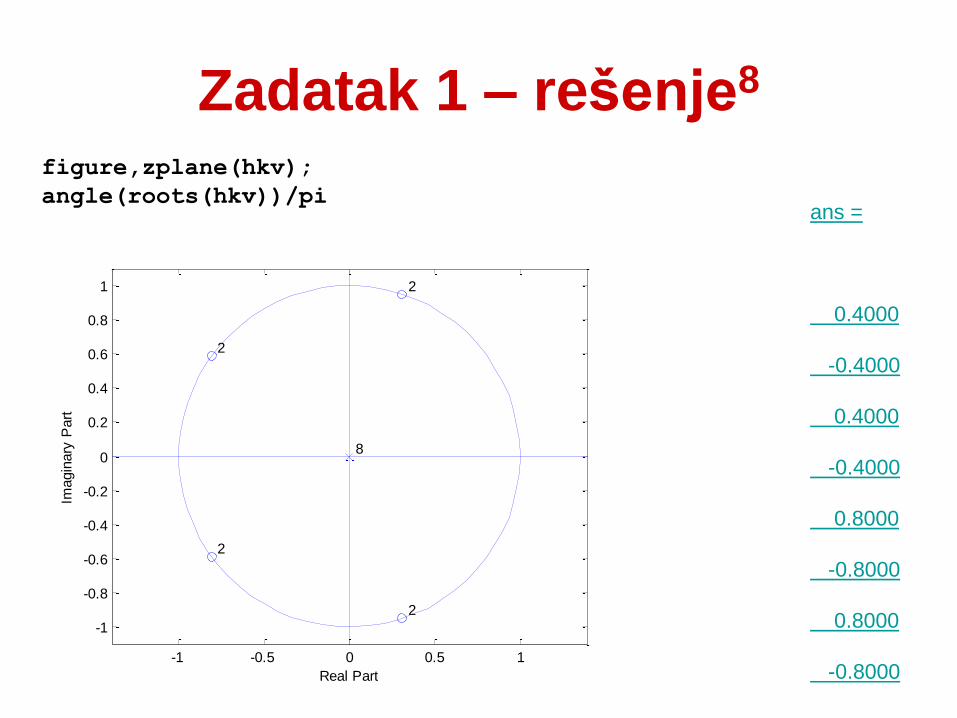
Zadatak 1 – rešenje8
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1 2
2
2
2
8
Real Part
Imagin
ary
Part
ans =
0.4000
-0.4000
0.4000
-0.4000
0.8000
-0.8000
0.8000
-0.8000
figure,zplane(hkv);
angle(roots(hkv))/pi





























