-
8/12/2019 P4 - Tiimus
1/6
8th International DAAAM Baltic Conference
"INDUSTRIAL ENGINEERING
19-21 April 2012, Tallinn, Estonia
CAMERA GIMBAL PERFORMANCE IMPROVEMENT WITH
SPINNING-MASS MECHANICAL GYROSCOPES
Tiimus, K. & Tamre, M.
Abstract: This proof-of-concept study was
done to research the advantages and
disadvantages when combining spinning-
mass gyroscopes with an electro-
mechanical gyro stabilized camera gimbal
mechanism on a small vertical take-off andlanding (VTOL)
rotorcraft and to show that
a method like this has the potential of
being used. As spinning-mass gyroscopes
conserve angular momentum, they can be
used to maintain system orientation and
also to eliminate vibrations dispersing
through the airframe. The experiment
started by attaching a small gyro stabilized
gimbal on a miniature VTOL rotorcraft and
performing flight tests and logging the data
about the base position angles inconjunction with the gimbal
mechanisms
output shafts position and ability to
compensate these rotational movements.
After that, 2 spinning-mass gyroscopes
were taken from inside missile guidance
units and implemented to the system by a
special pivoting mechanism. The tests were
performed again after upgrading the
mechanism. Although the overall take-off
weight of the platform increased, the
video-image quality, which was the mainevaluation method, was
significantly
improved.
Key words: VTOL rotorcraft, UAV gimbal,
Inertial Measurement Unit, Motion
control, Spinning-mass gyroscope
1. INTRODUCTIONFast developments in the field of small
unmanned multi-rotor-configurationrotorcraft have begun to push
aside
conventional helicopters due to their
simple mechanical build, relatively low
cost and secure operation. Being simple to
construct and build makes them also very
lightweight compared to other VTOL
machines. For this reason, multi rotoraerial vehicles are highly
maneuverable
and stable in non-windy conditions, but
very prone to stronger wind gusts, which
makes them oscillate and vibrate in a lot of
occasions. This may affect the used
instrument, especially video cameras with
CMOS sensors.
For this reason, a study was performed to
see, whether or not combining spinning-
mass gyroscopes help to improve theoverall performance of a the
electro-
mechanically gyrostabilized camera
gimbal. Spinning mass gyroscopes
conserve angular momentum (1) and add
synthetic inertia to the system.
(1)
By combining mechanical gyroscopes and
a positioning gimbal by a specialized
mechanism, which takes precession and therotation of the
spinning-mass gyroscopes
axes into account, it is possible to eliminate
the base motion (in this case VTOL
rotocrafts airframe rotational movement
(Fig.1)) from affecting the picture.
The obtained result would find many
applications where improved gimbal
precision and eliminated vibration are
crucial like laser illumination, distance
measuring, target surveillance and other
similar application areas.
-
8/12/2019 P4 - Tiimus
2/6
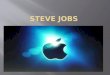
Fig. 1. Y6 Multirotor VTOL rotorcraft
without gyrostabilised gimbal
2. SYSTEM DESCRIPTION2.1. Developed gyrostabilizedmechanismThe
objective of the study was to find a
solution, which improves the performance
of a 2-axis electromechanically gyro-
stabilized camera gimbal [1](2) mounted
on a Y6 configuration multi rotor VTOL
rotorcraft (Fig. 1). The applicable small
gimbal is not roll-stabilized although it can
be used in Roll-Pitch confirugarion if
needed.
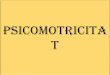
Fig. 2. Electro-mechanically gyrostabilised
camera gimbal test platform
The mechanism uses DC planetary
gearhead motors with integrated
incremental encoders. Absolute position
for each axis is retrieved with a binary
code disc and an optical switch. The
system uses 3 coordinate systems ground
(0), base (1) = IMU and gimbal (2) (Fig.
4).
Fig. 3. Coordinate systems: 0 - ground, 1
base/IMU and 2 gimbal output
At system startup, the optical switch
detects its relative position to zero angle
and seeks to according direction until the
front is reached (Fig. 5 and 7). At this point
the incremental encoders readout is reset
[6] and gimbal is ready for operation.
Fig. 4. Tilt mechanism
Fig. 5. Block diagram of motor controller
-
8/12/2019 P4 - Tiimus
3/6
Fig. 7. Tilt actuator: planetary gearhed DC
motor with integrated encoder, controller
and absolute positioning sensor (optical
switch)
Now the IMU (SBG Systems IG-500A)
detects the rotational movement of the base
and outputs Euler angles = (, , ) [5]
for yaw, pitch and roll to represent its
spatial orientation. This information is
processed in the main controller and output
to motor controllers by I2C bus (Fig.6). The
amount needed to compensate for the base
movements is calculated and with encoder
feedback, the mechanism axes rotate the
required amount.
2.2. Adding spinning-mass gyroscopesSpinning mass mounted on a
gimbal on a
base maintains its orientation based on the
principles of angular momentum [3]. The
higher the rotating speed and the mass of
the spinning body, the higher the applied
momentum is needed to deviate the
gyroscopes angle of rotation. Coming upwith a mechanism that
allows to constantly
maintain the angle of rotation to the 0-
coordinate system or in other words
removing the angular base motion [4] is
one of the key task for this study.
Precession of the spinning axis occurs
when a force is affecting the spinning mass
[3]. Although, if the angular speed and/or
mass of the spinning wheel is high enough,
the axis will hold its position and nodeviation occurs.
The mechanical test platform uses two
modified spinning-mass gyroscopes (Fig.
8) on 2 DOF-gimbals, so that their
rotational axes cross. This mechanism
itself is mounted on a separate gimbal,
which can pivot in all 3 rotational axes in
relation to the base. The electro-
mechanically gyrostabilized servo
mechanism is mounted underneath the
pivoting point so that the center of mass is
Fig. 6. Block diagram of system processes before implementing
spinning-mass
gyroscopes
-
8/12/2019 P4 - Tiimus
4/6
slightly on the lower side thus making
gravitation level the system when there is
no sideways acceleration occurring. In
other cases, the mechanical gyroscopes
resist the input force that is caused by
accelerating and decelerating the aircraft.
Fig. 8. Spinning-mass gyroscope from a
missile guidance system
This implementation adds a fourthcoordinate system between the
base and
the gimbal output (Fig. 9). Coordinate
system 1 is now solely the rotorcraft
(base), 1A is the spinng-mass mechanical
gyrosystems frame and also the IMU, and
coordinate system 2 remains the servo-
driven output.
Fig. 10. Coordinate systems: 0 - ground, 1 -
base, 1A - , 2 gimbal output
Because the coordinate system 1A can
rotate along with the spinning-mass
mechanism, an additional feedback unit is
needed on the pan axis to sum up in thefinal mechanical output
of the gimbal. For
this application an absolute encoder is
needed (Fig. 9), because incremental
encoder would also need indexing, which
is impossible in this case.
The gyroscopes used in this experiment
were removed from a missile guidance
system and during testing they were
powered up using compressed air.
2.3. Multirotor test platformThe base for testing the gyro
stabilized
mechanism was a custom Y6-configuration
multirotor VTOL platform (Fig. 11 & 12).
This allowed the gimbal to be mounted in
front of the aircraft so that the spinning-
mass mechanical gyroscope system
Fig. 9. Block diagram of system processes after implementing
spinning-mass gyroscopes
Spinning
mass
-
8/12/2019 P4 - Tiimus
5/6
pivoting point is at the same level with
aircrafts rotational center (Fig. 13).
Fig. 11. Multirotor VTOL rotorcraft
platform with gyrostabilized gimbal
2.4. ResultsThe aircraft has a standalone flight
controller which can also be used to log
flight data. When this information was
compared with the according data from the
gimbal mechanisms IMU unit, it was seen
that spinning-mass mechanical gyroscopesgreatly reduced the
amount of
compensation amplitude that was
necessary for the camera gimbals output
shaft to remain level. Most of the base
movements were canceled by the spinning-
mass gyrosystem. Another advantage is
seen when comparing the pre and after
results of a CMOS block camera image.
There was no rolling shutter artifact seen in
the image, when the mehcanical
gyroscopes are used. CMOS sensors are
known to be very prone to vibrations and
sudden sharp movements.
Fig. 12. Multirotor VTOL rotorcraft in test
hangar
3. FUTURE DEVELOPMENTSThe proof-of-concept with this system
was
achieved. Future plans include gathering
all the necessary data to develop the
methodology and procedures to calculate
exact parameters for the spinning-mass
gyroscopes. Another important task is to
construct customised driving motors for
gyroscopes that allow constant and long
operation. Finding the correct balance
between the spinning masses and their
angular velocities allows getting optimum
overall mass and saves energy.
4. CONCLUSIONThe objective of this study was to find a
method to take advantage of syntheticinertia provided by
spinning-mass
Fig. 13. Test equipment layout on the aircraft
S-M gyroscopes
Mechanisms
pivoting pointGimbal output axis
-
8/12/2019 P4 - Tiimus
6/6
gyroscopes to help in stabilizing a electro-
mechanically gyrostabilized camera
gimbal. The results were satisfying and the
most significant part is the fact that there is
no need to void the biggest advantage of
multi rotor aircraft, which is being verylightweight and agile,
by adding additional
mass to the frame of the vehicle to cope in
gusty weather conditions. Instead it is
possible to modify the gimbal suspension
type and use it in conjunction with
spinning-mass gyroscopes to keep the
gimbal level plus eliminate almost all
vibrations. The fact that the gimbal is
moving independently from the crafts
frame allows to use smaller and lighter
servomotors which are used to direct theused instrument to the
desired position.
This somewhat also compensates the mass
of the mechanical gyroscopes. Additional
research needs to be done.
5. REFERENCES1. Tiimus, K. & Tamre. M. Camera
Gimbal Control System for
Unmanned Systems, Tallinn
University of Technology, 2010
2. Ghosh, M. Moment of Inertia andNutation of a Captured
Gyroscope,
The College of Wooster, 1998
3. Spinning Mass MechanicalGyroscopes, US Dynamics
Corporation, 2006
4. Nettmann, E.F. Comparison ofGyro-Stabilized Camera Mounts
for
the Motion Picture Industry,
Nettmann Systems International,2011
5. Guinamard, A. IGN-500A AHRS,SBG Systems, 2009
6. Merry, R.J.E., van de Molengraft,M.J.G. & Steinbuch, M.
Velocity
and acceleration estimation for
optical incremental encoders,Eindhoven University of
Technology, 2010
6. CORRESPONDING ADDRESSMSc. Kristjan Tiimus
Department of Mechatronics, Tallinn
University of Technology
Ehitajate tee 5, 19086 Tallinn, Estonia
Phone: +372 5177186
E-mail: [email protected]
7. ADDITIONAL DATA ABOUTAUTHORS
1) MSc. Kristjan Tiimus, Prof. Mart Tamre
2) Title of Manuscript: Camera Gimbal
Performance Improvement With Spinning-
Mass Mechanical Gyroscopes
3) Full Address of all authors:
Kristjan Tiimus / MSc. / Department of
Mechatronics, Tallinn University of
Technology / Ehitajate tee 5, 19086.
Tallinn, Estonia / [email protected] /
+372 5177186
Mart Tamre / Prof. / Department of
Mechatronics, Tallinn University of
Technology /Ehitajate tee 5, 19086.
Tallinn, Estonia / [email protected] / +372
6203202
4) Corresponding Author: Kristjan Tiimus,
Tallinn University of Technology,Ehitajate tee 5, 19806,
Tallinn, Estonia