Embed Size (px)
Citation preview
Path Planning of Robot in Three-dimensional Grid Environment based on Genetic Algorithms
Hua Zhang, Manlu Liu, Ran Liu, Tianlian Hu
Intelligent Control and Automation, 2008. WCICA 2008.7th World Congress on
25-27 June 2008 Page(s):1010 - 1014
Presented by :曹憲中
Outline
INTRODUCTION ENVIRONMENT MODEL PATH PLANNING EXPERIMENTAL ANALYSIS CONCLUDING REMARKS
INTRODUCTION Framework Space Approach Topology Grid method Free-Space method Neural Network Artificial Potential Field Fuzzy Theory Genetic Algorithm ……
Outline
INTRODUCTION ENVIRONMENT MODEL PATH PLANNING EXPERIMENTAL ANALYSIS CONCLUDING REMARKS
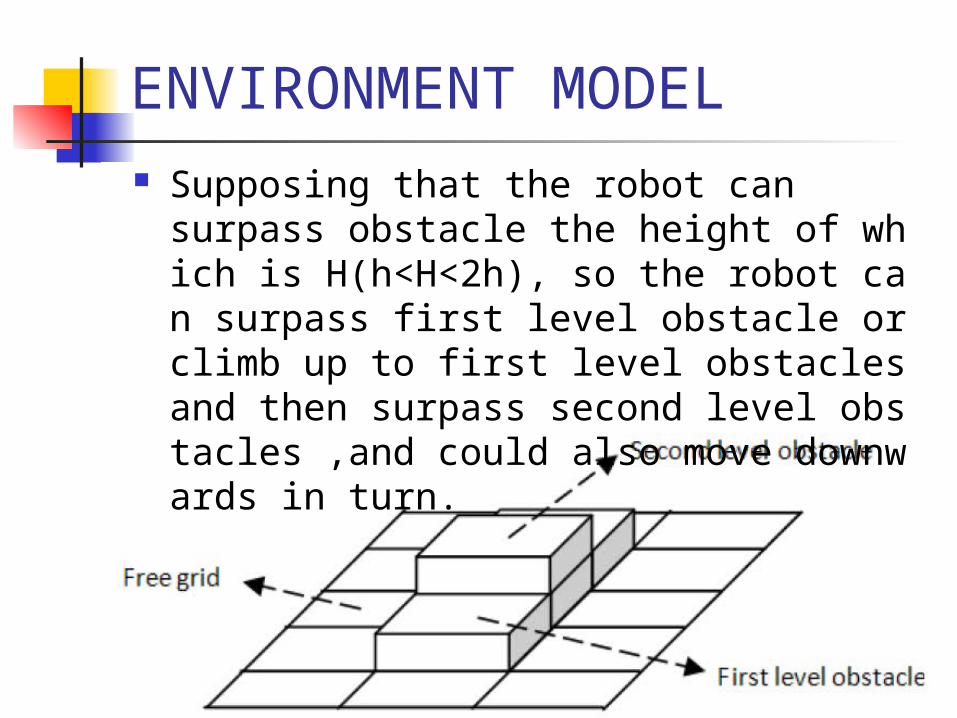
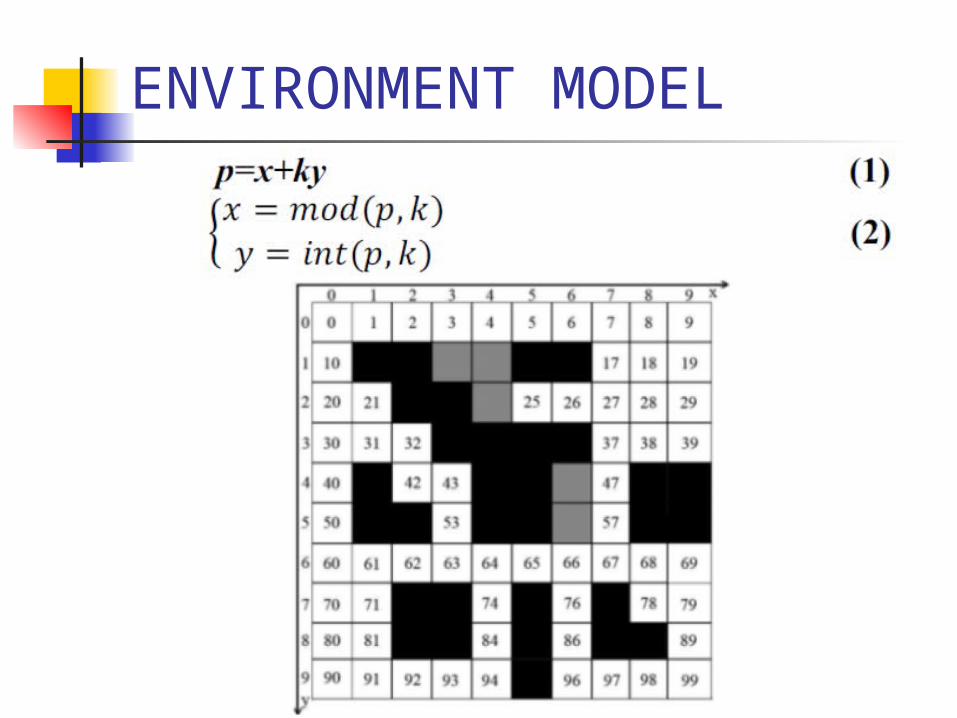
ENVIRONMENT MODEL Supposing that the robot can surpass
obstacle the height of which is H(h<H<2h), so the robot can surpass first level obstacle or climb up to first level obstacles and then surpass second level obstacles ,and could also move downwards in turn.
ENVIRONMENT MODEL
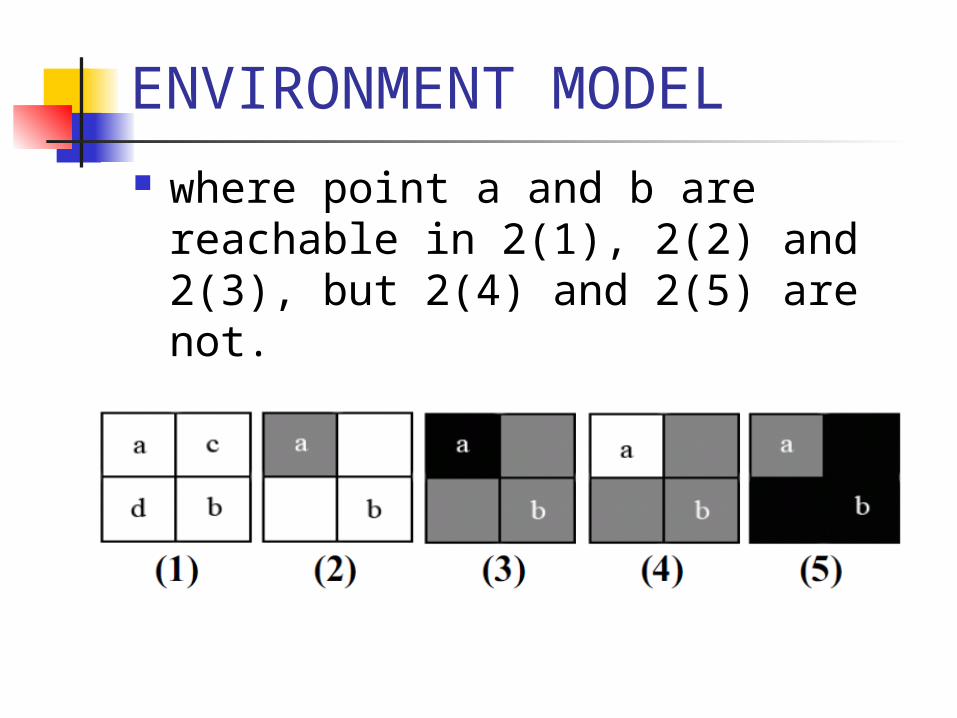
where point a and b are reachable in 2(1), 2(2) and 2(3), but 2(4) and 2(5) are not.
ENVIRONMENT MODEL
Outline
INTRODUCTION ENVIRONMENT MODEL PATH PLANNING EXPERIMENTAL ANALYSIS CONCLUDING REMARKS
PATH PLANNING
A. Coding
0->10->20->30->40->50->60->61->62->63->64->65->66->67->68->79->89->99
(0,0) (0,1) (0,2) (0,3) (0,4) (0,5) (0,6) (1,6) (2,6) (3,6) (4,6) (5,6) (6,6) (7,6) (8,6) (9,7) (9,8) (9,9)
(0000, 0000) (0000, 0001) (0000, 0010) … (1001, 1001)

PATH PLANNING
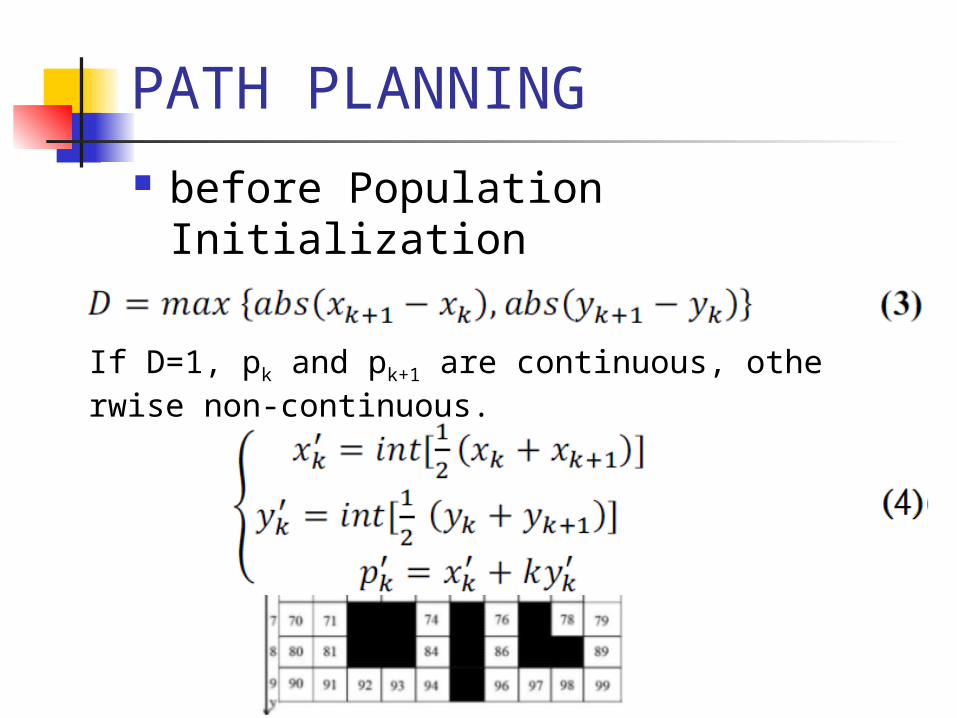
before Population Initialization
1) Height trap
2) Connected domain
PATH PLANNING
before Population Initialization
3) Median Interpolation
If D=1, pk and pk+1 are continuous, otherwise non-continuous.
PATH PLANNING B. Population Initialization
{0,30,99} {0,12,20,32,55,87,92,99 } {0,44,68,99}.
Step1: Detecting points in the intermittent path; there are four connectivity domains
which each point is in: a. solid obstacles, U3; b. first level obstacles, U1i; c. second level obstacles, U2i; d. free grids, U0.
PATH PLANNING B. Population InitializationStep2: Supposing there are two serial numbers, a and b.
If a∈U3, delete it directly;If a∈U0, b∈U0 or a∈U1i, b∈U1j (i≠j) or a∈U0,
b∈U1, connects two points according to median interpolation method in U0 and U1;If a∈U1i, b∈U1i or a∈U2i, b∈U2i, connects two
points according to median interpolation method in this connected domain;If a∈U2i, b∈U1j and U1j is adjacent with U2i connects two points according to median interpolation method in U1j and U2i;
PATH PLANNING B. Population InitializationStep2:
If a∈U0, b∈U2 or a∈U2i, b∈U2j (i≠j) or a∈U1i, b∈U2i (U1i isn’t adjacent with U2j ), search c (c∈U1) that is adjacent with U2 and is the shortest distance to b. The method is:
Where xb, xci, yb, yci is Cartesian coordinates of b andci; Si is the distance between b andci; S is the shortest distance.
Repeat Step2 until path is continuous.
PATH PLANNING B. Population InitializationStep3: Deleting operator When path is
continuous, redundant serial numbers that are between two identical serial
numbers in an individual must be deleted, and one of two identical serial numbers also is deleted.
PATH PLANNING C. Evaluation of Individual
Loss of time and energy isn’t considered, and height of obstacle is excluded in the path length. In the paper, evaluation function of individual is
Where n is the sum of grid number of individual and A is total straight distance between adjacent serial number in the individual; f and A are positive proportional.
PATH PLANNING
D. Genetic Manipulation 1) Choice: roulette method. 2) Cross-operation: coincidence inter-
cross. 3) Mutation: Deleting it or replaced by a
stochastic serial number.
Outline
INTRODUCTION ENVIRONMENT MODEL PATH PLANNING EXPERIMENTAL ANALYSIS CONCLUDING REMARKS
EXPERIMENTAL ANALYSIS
algorithm is simulated in JCreater, and the inserting and deleting operator are designed by JAVA language.
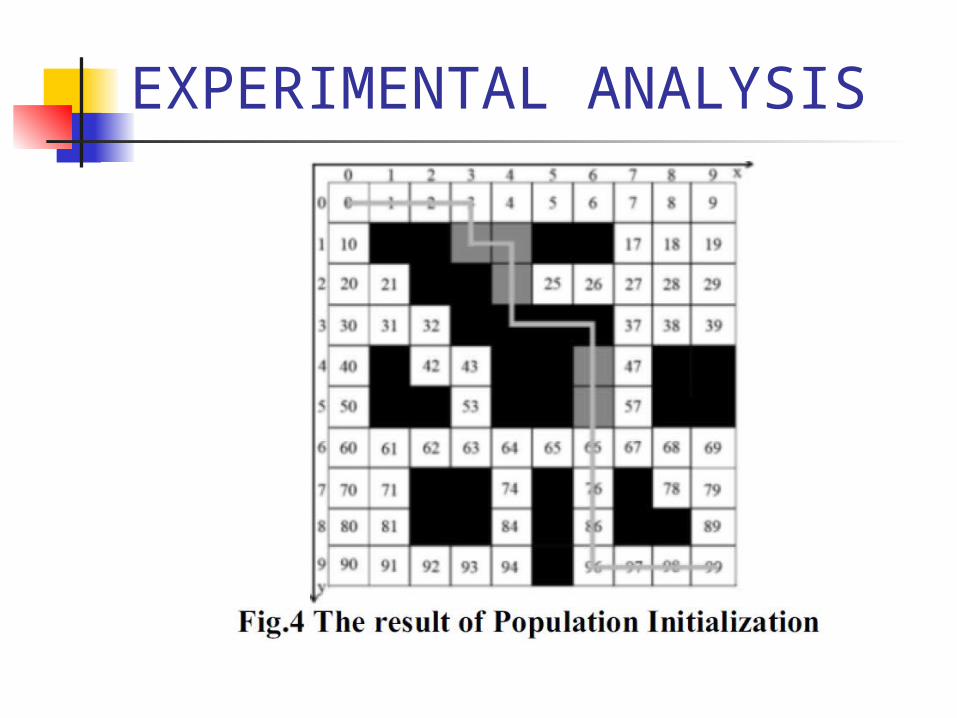
one chromosome is {0, 13, 34, 76, 99} in the initial population, and continuous path is produced in Fig.4 after the inserting and deleting operation.
EXPERIMENTAL ANALYSIS
EXPERIMENTAL ANALYSIS
Supposing population size is 30; the length of chromosome is 100; the probability of inter-cross is 0.3; the probability of aberrance is 0.01; the distance of adjacent grid is 10 in the
horizontal and vertical direction; the distance of adjacent grid is 14 in the
diagonal direction.

EXPERIMENTAL ANALYSIS
The optimal path is shown in Fig.5 after 50 generations. The value of fitness function is f=201.29.

EXPERIMENTAL ANALYSIS
The optimal path is shown in Fig.6 after 55 generations. The value of fitness function is f=195.

Outline
INTRODUCTION ENVIRONMENT MODEL PATH PLANNING EXPERIMENTAL ANALYSIS CONCLUDING REMARKS
CONCLUDING REMARKS
This paper proposes a path planning method in three-dimensional environment.
Gird method is used to establish the work environment of robot.
Combining with the actual situation, improved GA is presented to optimize path planning.
CONCLUDING REMARKS
The algorithm this paper adopts solves the problem that the robot falling into the height trap effectively.
Experiment results testify the effectiveness and feasibility of the algorithm in three-dimensional environment.
Thank you for your attention.