Embed Size (px)
Citation preview

1
PERANCANGAN SISTEM PENGENDALIAN FLOW SEAWATER INLET DAN pH SODIUM HYPOCHLORITE (NaOCl) PADA HIPOCHLORINATION PACKAGE BERBASIS LOGIC SOLVER,
HESS (INDONESIA-PANGKAH) Ltd., GRESIK
Ike Meillina Putri, Totok Soehartanto, Fitri Iskandarianto.
Jurusan Teknik Fisika – Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember
Kampus ITS Keputih Sukolilo, Surabaya 60111 E-mail: [email protected]
ABSTRAK
Banyaknya biota laut yang masih tumbuh dan berkembang pada suction basin diakibatkan oleh laju aliran
masukan yang tidak pernah terpenuhi sehingga kuantitas sodium hipoklorit kurang terjamin dan pH yang tidak terjaga dalam kurva kerjanya. Oleh sebab itu dilakukan perancangan sistem pengendalian laju aliran masukan electrolyzer dan pengendalian pH sodium hipochlorit. Penelitian ini dimulai dengan memodelkan masing-masing penyusun sistem pengendalian. Setelah didapatkan model, kemudian dibangun sistem pengendalian berbasis logic solver dan dilakukan pengujian tracking setpoint dan pengujian beban. Pada pengujian tracking setpoint pada setpoint 3,75, %bukaan valve 66,08%, Ess 0.053 % dan time settling 18.5 sekon. Pada setpoint 4, %bukaan valve 63.52%, Ess 0.875 % dan time settling 17.5 sekon. Pada setpoint 4.25 %bukaan valve 61.32%, Ess 0.212 % dan time settling 20.8 sekon. Pengendalian flow yang terpenuhi berdampak pada hasil elektrolisis, dengan set arus maksimum didapatkan total klorin maksimum yakni 2.7 g/h sehingga konsentrasi NaOCl 708 mg/mL, dan pada pengendalian pH NaOCl dengan menambahkan larutan asam HBr dengan %bukaan valve 3.811% didapatkan pH 8 dan Ess 0.0004%.
Kata Kunci: hipochlorination, sodium hypochlorite, logic solver
I. PENDAHULUAN
Air laut telah menjadi salah satu utilitas yang umum digunakan dalam industri khususnya oil and gas industry untuk berbagai tujuan proses pendinginan misalnya pada SO2 scubber. Air laut perlu diproses terlebih dahulu sebelum digunakan untuk mencegah pertumbuhan biota laut (moluska, kerang, ganggang) dalam sistem dan meminimalkan bio-fouling. Namun banyak terjadi permasalahan dengan adanya bio-fouling. Hipoklorinasi merupakan salah satu seawater threatment yang paling efektif untuk perawatan air laut, khususnya dalam pengendalian bio-fouling[5].
Berdasarkan hasil investigasi yang dilakukan tim HESS diketahui bahwa masih banyak biota yang tumbuh dan berkembang pada suction basin. Hal ini diduga jumlah klorin yang diinjeksikan kurang memadai untuk menghambat pertumbuhan biota laut akibat produksi sodium hipoklorit yang dihasilkan sedikit dan pH diatas operasional karena laju aliran yang masuk pada electrolyzer hanya 2.2 m3/h, arus yang dialirkan hanya 303-304 A hampir 50% dari arus maksimum, sehingga klorin yang dihasilkan juga hanya 50% dari klorin dalam kondisi normal.
Dalam menghambat pertumbuhan biota laut, proses pada hipochlorination package ditinjau dari beberapa hal yaitu laju aliran, total klorin, konsentrasi NaOCl, pH NaOCl, dan residual free chlorine. Kelima hal ini sangat menentukan kualitas dan kuantitas produk hipochlorination package. Namun dalam penelitian ini hanya ditinjau dari laju aliran yang berdampak pada konsentrasi produk NaOCl, dan pH NaOCl yang berdampak pada residual free chlorine.
Oleh sebab itu, untuk mempertahankan kuantitas dan kualitas hipochlorination package, kelima parameter harus terpenuhi, yaitu laju aliran yang nantinya menentukan kinerja electrolyzer untuk menghasilkan klorin, dan kualitas NaOCl. Sehingga dirancang sistem pengendalian flow masukan electrolyzer berbasis logic solver. Selain laju aliran, parameter lainnya yaitu pH NaOCl, kemudian dirancang sistem pengendalian pH hasil dari elektrolisis, sehingga pH tetap terjaga dalam kurva kerjanya. pH yang dapat terjaga menentukan residual free chlorine yang dihasilkan saat produk elektrolisis diinjeksikan pada SWI pumps suction. Kuantitas dan kualitas hipochlorination package ini dapat dilihat dari kurva respon reaksi dan pH NaOCl. Pada penelitian ini, laju aliran masukan electrolyzer akan terpenuhi sehingga arus yang dialirkan dan total klorin yang dihasilkan maksimum. Klorin yang tercukupi dan pH yang sesuai dengan kurva kerja dapat menghambat pertumbuhan biota laut sehingga tidak merusak instrument dan proses pada Gas Processing Facility (GPF) basin HESS (Indonesia-Pangkah) Limited.
II. Tinjauan Pustaka
Bab ini berisi landasan teori yang menunjang penyelsaian masalah yang diangkat melalui penelitian ini.

2
2.1 Hypochlorination Package Pada dasarnya hipochlorination package adalah unit
yang digunakan untuk mengolah air laut menjadi sodium hipoklorite (NaOCl) untuk diinjeksikan pada suction pompa, agar dapat menghambat pertumbuhan dan perkembangbiakan biota yang terbawa oleh air laut. Berikut ini Process flow diagram hipochlorination package
Gambar 2.1 Process Flow Diagram Hipochlorination package OPF, HESS-Pangkah[6]
2.1.1 Masukan Electrolyzer
Pada masukan electrolyzer terdapat tiga SWI pumps. Ketiga pompa ini memiliki spesifikasi dan kapasitas yang sama. Namun dalam kondisi operasi hanya dua pompa yang beroperasi dan satu hanya dalam kondisi standby.
Pompa ini bertipe sentrifugal dengan kapasitas normal 850 m3/h. Total flowrate dari dua pompa yang bekerja masuk pada header pipe berdiameter 20 inchi dan kemudian bercabang ke suction basin dengan pipa berdiameter 20 inchi dan ke electrolyzer dengan pipa berdiameter. Berikut piping drawing masukan electrolyzer.
Gambar 2.3 Piping Drawing masukan electrolyzer
Dari gambar 2.3 masukan electrolyzer dapat dimodelkan berdasarkan hukum kesetimbangan massa. Hukum kesetimbangan massa yang sering dikenal dengan hukum kontinuitas dalam aliran fluida, yaitu menyatakan bahwa massa yang terakumulasi merupakan selisih laju massa input dengan laju massa output. Dengan mengetahui massa yang terakumulasi didalam sistem maka mekanisme perubahan massa per satuan waktu dapat dihitung[7].
� ������������ � ������� � � ����� ����
���� ����� � � ����� �������� ������� (2.1)
Namun dalam pipa tidak terdapat akumulasi massa, sehingga menjadi: ������ � ������ !"#� � � $%$&�' %()$' * � +,-.� � $%$&�' %()$' � !"#� � � +,-.� (2.2) Dimana !"#� � ���� ����� /01 23/�5 � $%$&�' %()$' � ���� ����� ���6����78�� 23/�5 � +,-.� � ���� ����� ���� 23/�5
2.1.2 Strainer Strainer merupakan filter yang digunakan
sebagai menyaring fluida dengan mempertimbangkan besar partikel yang diijinkan lolos. Dalam hipochlorination package ini, strainer yang digunakan mampu menyaring partikel hingga < 300 micron dengan kemampuan absorbs mencapai 40%. Strainer yang digunakan berbahan PVC yang dikenal dengan tahan korosi sehingga cocok untuk air laut.
Daya absorbsi yang dimiliki filter tidaklah konstant. Praktiknya, daya absorbsi filter semakin lama akan semakin berkurang sesuai dengan banyaknya solid kurang dari 300 mikron dan air yang tersaring. Dengan daya absorbsi yang semakin berkurang ini, maka laju aliran yang melewati strainer semakin cepat. Sehingga kondisi diatas dapat dijelaskan dengan persamaan sebagai berikut:
� �� � � .� � 2� .�. %;�������) (2.3)Dimana, ��� � ���� ����� ��� � ������� 23/�5 � �� � ���� ����� ������ ������� 23/�5 %;������ � <�7� �������� ������� 2.1.3 Electrolyzer
Electrolyzer adalah alat yang digunakan untuk proses elektrolisis air laut dengan mengalirkan arus listrik pada sel electrolyzer berbentuk tabung dan menghasilkan larutan sodium hipoklorit dan gas hidrogen.
Berikut ini reaksi yang terjadi pada proses elektrolisis[10]: Reaksi oksidasi pada Anoda 2Cl- → 2 Cl2(g) + 2 e- (2.4) Diikuti oleh proses hidrolisis klorin Cl2 + H2O → HOCl + Cl- + H+ (2.5) Reaksi reduksi pada Katoda Na+ + e- → Na (2.6) Diikuti oleh proses hidrolisis sodium 2Na+ + 2 H2O + 2 e- → 2 NaOH + H2 (2.7) Asam (HOCl dan HCl) yang dihasilkan di anoda bereaksi dengan basa NaOH yang dihasilkan pada katoda HCl + NaOH → NaCl + H2O (2.8) HOCl + NaOH → NaOCl + H2O (2.9) Reaksi pada sel electrolyzer 2NaOH + Cl2 → NaCl + NaClO + H2O (2.10) Total Reaksi NaCl + H2O → e- → NaClO + H2 (2.11)
Berdasarkan data laboratorium didapatkan total massa klorin yang terbentuk dalam proses elektrolisis, dengan kesetimbangan reaksi didapatkan mol sodium hipoklorit (persamaan reaksi 2.10) dan mol gas hydrogen (persamaan reaksi 2.11) yang terbentuk, dengan persamaan sebagai berikut:
�� � =>' (2.12)

3
Dimana mol = mol unsur m = massa unsur Mr = massa molekul relatif
Pada persamaan 2.12 menjelaskan bahwa mol
merupakan jumlah materi yang terkandung sebagai kuantitas dasar dalam bentuk atom, molekul atau partikel lain[13].
2.1.4 Degassing Tank
Produk hasil elektrolisis ditampung dalam degassing tank. Degassing tank mampu mengakomodasi larutan sodium hipoklorit dan pelepasan gas hydrogen dengan cara dilute blower. Degassing tank dapat dimodelkan dengan hukum kesetimbangan massa seperti persamaan. Berikut proses yang terjadi pada degassing tank dan dimodelkan matematis sebagai berikut: <<� � �� �� ���
?@ABCBDAECEF?� � @G.�_% * G.�_IF � @G ��_% * G ��_IF (2.13)
dimana G��_% � ��J� ��K�� ��� �� ������ L�M�N 2 O �⁄ 5 G��_I � ��J� ��K�� ��� �� O�� QR 2 O �⁄ 5 G ��_% � ���� ����� ������ ������ L�M�N 23 �⁄ 5 G ��_I � ���� ����� ������ O�� QR 23 �⁄ 5 S% � ���� ���� ������ L�M�N 2 O T⁄ 5 SI � ���� ���� O�� QR2 O T⁄ 5 U% � U���� V���<� <��� ��O � 235 UI � W���� O�� <��� ��O � 235 2.2 Gas Hidrogen
Gas hydrogen merupakan salah satu produk dari proses elektrolisis air laut. Gas hydrogen merupakan gas diatomic yang mudah terbakar. Batas ambang ledakan bawah gas hidrogen pada konsentrasi 4.1 % H2 dan ambang batas atas 74.8% H2. Jika konsentrasi gas tersebut berada dibawah LEL, maka ledakan tidak akan terjadi karena kurangnya bahan bakar; jika konsentrasi berada diatas UEL, maka tidak tersedia cukup oksigen untuk memulai reaksi.[12]
2.3 Hidrogen Bromine (HBr) Hidrogen bromide merupakan asam yang dapat
direaksikan dengan sodium hipochlorite membentuk asam hypobromous yang efisien dan cepat bercampur dalam pipa maupun dalam tangki serta tidak menghasilkan gas klor in yang berbahaya pada konsentrasi kurang dari 2%. Berikut ini reaksi yang terbentuk:
HBr + NaOCl → HOBr + NaCl (2.14) Dimana HBr = hydrogen bromide precursor NaOCl = sodium hypochlorite HOBr = hypobromous acid NaCl = sodium chloride 2.4 Estimator pH
Estimator pH dibangun berdasarkan pH NaOCl yang keluar dari elektrolisis. NaOCl ini yang nantinya
diinjeksikan pada suction pompa untuk menghambat tumbuh dan berkembangnya biota laut.
Efektivitas klorin tergantung pada biota yang terbawa dan itu merupakan fungsi dari pH. Kekuatan pembunuhan HOCl jauh lebih besar daripada OCl-. Oleh sebab itu, semakin tinggi pH, klorin kurang efektif. Klorin hanya aktif sebesar 1-10% pada pH 8 – 9. Air laut mengandung ion bromide, klorin mengoksidasi ion bromide dari HOBr yang masih merupakan biosida efektif pada pH 8-9.
2.5 Pengendalian Flow
Pengendalian flow mempunyai sifat khusus karena cepatnya proses. Elemen proses flow, baik flow gas maupun flow zat cair bereaksi cepat terhadap perubahan bukaan valve. Dalam satu loop, periode respon sistem pengendlian flow lebih ditentukan oleh elemen-elemen instrumentasi daripada elemen prosesnya[3].
Alat ukur yang digunakan dalam pengendalian flow adalah magnetic flowmeter yaitu volumetric flow meter yang tidak mempunyai bagian bergerak dan idela untuk aplikasi air limbah atau cairan kotor yang konduktif listrik[3].
Prinsip kerja magnetic flowmeter ini didasarkan pada hukum induksi elektromagnetik (Faraday’s Low), yaitu apabila suatu fluida kondukstif elektrik melewati pipa tranducer, maka fluida akan bekerja sebagai konduktor yang bergerak memotong medan magnet yang dibangkitkan oleh kumparan magnetic transducer, sehingga timbul tegangan listrik induksi. Hubungan ini dapat dinyatakan sebagai berikut:
� � X. �. W (2.15) Dimana: e = tegangan listrik induksi B = rapat fluks medan magnet l = panjang kondultor (diameter dalam pipa) v = kecepatan konduktor (laju aliran) 2.6 Prinsip Bernoulli Fluida mengalir ketika terjadi perbedaan head pada dua buah titik yang berbeda. Head merupakan energi per satuan berat pada fluida yang mengalir. Penurunan persamaan Bernoulli untuk sepanjang garis arus didasarkan pada hukum Newton II. Persaamaan ini diturunkan dengan anggapan bahwa: a. Fluida tidak memiliki kekentalan/inviscid flow
(kehilangan energi akibat gesekan adalah nol) b. Fluida memiliki sifat tak termampatkan
(incompressible flow), dimana rapat massa fluida/densitas adalah konstan.
c. Aliran steady atau kecepatan aliran (flow rate) adalah merata dalam suatu penampang. [2]
Persamaan Bernoulli dinyatakan sebagai berikut [2]:
YZA * [Z\
RI * 8] � Y\A * [\\
RI * 8R (2.16)

4
dimana: p1 dan p2 = tekanan pada titik 1 dan 2 v1 dan v2 = kecepatan aliran pada titik 1 dan 2 z1 dan z2 = perbedaan ketinggian titik 1 dan 2 S = berat jenis fluida g = percepatan gravitasi = 9,806 m/s2
Persamaan diatas dapat digunakan untuk menyelesaikan banyak permasalahan tipe aliran, biasanya untuk fluida inkompresibel tanpa adanya penambahan panas atau energi yang diambil dari fluida. Kecepatan dan Kapasitas Aliran Fluida Besarnya kecepatan aliran fluida pada suatu pipa mendekati nol pada dinding pipa dan mencapai maksimum pada tengah-tengah pipa. Kecepatan biasanya sudah cukup untuk menempatkan kekeliruan yang tidak serius dalam masalah aliran fluida sehingga penggunaan kecepatan sesungguhnya adalah pada penampang aliran. Bentuk kecepatan yang digunakan pada aliran fluida umumnya menunjukkan kecepatan yang sebenarnya jika tidak ada keterangan lain yang disebutkan. Besarnya kecepatan akan mempengaruhi besarnya fluida yang mengalir dalam suatu pipa. Jumlah dari aliran fluida mungkin dinyatakan sebagai volume, berat atau massa fluida dengan masing-masing laju aliran ditunjukkan sebagai laju aliran volume (m3/s), laju aliran berat (N/s) dan laju aliran massa (kg/s). Kapasitas aliran (Q) untuk fluida yang inkompresibel menurut [2] yaitu: Q = A . v (2.17) dimana: Q = laju aliran volume (m3/s)
A = luas penampang aliran (m2) v = kecepatan aliran fluida (m/s) 2.7 Logic Solver sebagai Controller
Kontroler berbasis logic solver adalah suatu tipe kontroler yang bekerja berdasarkan logika (logic). Perbedaan mendasar dari kontroler ini adalah tidak adanya operasi berupa perhitungan matematik seperti pada mode kontrol proporsional (P), proporsional integral (PI), maupun proporsional integral derivatif (PID). Dengan kata lain, untuk kontroler berbasis logic solver, sudah ditentukan berapa nilai keluaran sinyal kontrol. Penentuan nilai sinyal kontrol logic solver ini didasari oleh hasil pengujian secara open loop, dimana melalui pengujian secara open loop ini dapat diketahui berapa nilai sinyal kontrol yang sesuai untuk membuka control valve sehingga proses variabel yang dikendalikan mampu mencapai set point. Dengan kata lain algoritma kontroler berbasis logic solver dibangun berdasarkan logika kontrol yang diinginkan untuk mengatur suatu sistem tertentu. Prinsipnya adalah dengan mengetahui range sinyal kontrol tertentu untuk mencapai set point yang diinginkan. 2.7.1 Aplikasi Logic Solver dengan Tabel Kebenaran
Logic solver pada dasarnya berisi sebuah perintah sebab - akibat yang befungsi sebagai pasangan aksi - kondisi dari sebuah proses. Pasangan aksi - kondisi pada logic solver dapat disusun melalui deskripsi kondisi yang kemudian diartikan oleh kontroler melalui tabel aksi. Tabel kondisi adalah suatu kumpulan deskripsi kondisi daripada tabel kebenaran sebagai interpretasi kejadian yang mungkin
terjadi pada saat model yang dibuat disimulasikan. Respon daripada kondisi - kondisi yang terjadi ini disebut sebagai aksi. Deskripsi aksi dibuat melalui tabel aksi dan diberi inisialisasi atau penamaan yang identik. Inisialisasi ini dibuat dengan tujuan agar tidak terjadi keputusan ganda pada saat tabel kebenaran disimulasikan. Kondisi T (True) adalah kondisi dimana kondisi yang dideskripsikan bernilai 1 (satu), untuk F (False) bernilai nol (0) sedangkan “-“ (antara 1 dan 0) adalah kondisi default. Kondisi default ini adalah kondisi dimana kedua kemungkinan nilai 0 dan 1 menjadi sebuah pilihan. Pada truth table, kondisi default diterjemahkan pada kolom terakhir dan baris terakhir dan harus ada di setiap pembuatan logic solver berbasis truth table ini. Selanjutnya dilakukan perancangan kontroler berbasis logic solver dengan menggunakan simulator. Simulator yang digunakan dalam penelitian ini menggunakan MATLAB simulink.
II I. PEMODELAN DAN PERANCANGAN
SISTEM
3.1 Alur Penelitian Berikut merupakan tahapan - tahapan yang
dilakukan pada penelitian ini dapat dijabarkan melalui flowchart berikut.
Gambar 3.1 Alur Penelitian
Dalam melakukan penelitian ini ada beberapa tahapan, antara lain: melakukan observasi tinjauan lapangan permasalahan yang ada dilapangan. Setelah menemukan permasalahan selanjutnya dilakukan studi literatur mengenai plant melalui PFD & P&ID serta mengamati proses yang terjadi.

5
Langkah selanjutnya adalah mengumpulkan datasheet dari setiap instrument yang berhubungan serta data daily record masing-masing instrument. Keseluruhan data ini digunakan untuk memodelkan dinamika proses yang terjadi pada hipochlorinaton package. Setelah mendapatkan model masing-masing instrument, kemudian dilakukan verifikasi data kalibrasi untuk menentukan daily record masih sesuai dengan pengukuran sebenarnya atau tidak. Selanjutnya dilakukan pemodelan plant secara matematis dan dimodelkan dalam simulink MATLAB, kemudian model tersebut divalidasi untuk mengetahui sudah sesuai dengan dinamika plant atau tidak. Apabila belum sesuai dengan dilakukan pemodelan matematis ulang, dan apabila sesuai dirancang pengendalian berbasis logic solver, selanjutnya dianalisa sistem pengendalian hipochlorination secara keseluruhan.
3.2 Perancangan Hipochlorination Package 3.2.1 Masukan Electrolyzer Dalam rancangan pengendalian flow ini dilakukan modifikasi piping agar laju aliran yang masuk ke electrolyzer lebih besar sehingga laju aliran ini dapat dimanipulasi oleh bukaan control valve yang masuk ke electrolyzer, dan sisa laju aliran dikembalikan pada pipa suction basin. FV-142 sebagai flow control valve mendapatkan sinyal kontrol dari FIC-142 berdasarkan hasil pengukuran flow FT-142 di inlet electrolyzer. Berikut ini diagram blok dan P&ID rancangan sistem pengendalian flow.
Gambar 3.2 Diagram blok sistem pengendalian flow
Gambar 3.3 P&ID Rancang Pengendalian Flow
t3
flow_basin
300025002000150010005000
1070
1060
1050
1040
1030
1020
S 3.03626
R-Sq 90.4%
R-Sq(adj) 90.3%
Regression
95% CI
95% PI
Fitted Line Plotflow_basin = 1043 - 0.05159 t3
+ 0.000055 t3**2 - 0.000000 t3**3
Gambar 3.4 Kurva laju aliran menuju basin
Dan didapatkan persamaan: G�_���� � 1043 � 0.05159� * 0.000055�R
� 0.0000001 �3 Berdasarkan Gambar 3.3 dapat dilihat bahwa
laju aliran masukan pada electrolyzer adalah laju aliran SWI dikurangi laju aliran yang menuju pada Basin.
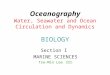
Selain data laju aliran menuju basin, didapatkan juga data laju aliran yang berasal dari SWI pump, yang diplot dalam MINITAB sebagai berikut:
t3
SWI
300025002000150010005000
1100
1090
1080
1070
1060
1050
1040
1030
1020
S 3.32442
R-Sq 96.3%
R-Sq(adj) 96.3%
Regression
95% CI
95% PI
Fitted Line PlotSWI = 1045 - 0.05977 t3
+ 0.000077 t3**2 - 0.000000 t3**3
Gambar 3.5 Kurva laju aliran SWI
Dan didapatkan persamaan: G�_/01 � 1045 � 0.05977� * 0.000077�R
� 0.0000001 �3 Berdasarkan persamaan 2.2 pada bab
sebelumnya dijelaskan bahwa masukan electrolyzer berdasarkan hukum kontinuitas. Dari persamaan tersebut kemudian disimulasikan dalam MATLAB Simulink, dan berikut model masukan electrolyzer:
Gambar 3.6 Wiring Masukan Electrolyzer
- Flow Transmitter FT-142 Flow transmitter FT-142 membaca dan mentransmisikan sinyal pembacaan ke control room. Transmitter ini membaca besaran laju aliran masukan pada electrolyzer.
Fungsi transfer dari flow transmitter dapat diperoleh melalui persamaan berikut:
G (G e
� fghg� * 1
fi � ��� ��������� ���� � 220 � 45;
23060 � 05 m3/s� 0.0052
hg � 63.2100 . 0.2� � 0.1264 �

6
Berdasarkan perhitungan di atas maka diperoleh fungsi transfer sebagai berikut:
G (G e
� 0.00520.1264� * 1
- Flow Control Valve FV-142
Untuk mengontrol laju aliran masukan pada electrolyzer digunakan control valve FV-142. Model matematis dari control valve sebagai berikut:
n 2�5�o2�5 � f
h[� * 1
dimana n 2�5 = laju aliran electrolyzer yan termanipulasi (m3/s) o2�5 = sinyal masukan ke control valve (mA) f = gain control valve h[ = time konstan control valve (s)
f � f#/Y . f,&��,� ' dengan
f#/Y � /�� �������� <��� 1 �� �/�� ������7�� �����
f,&� � /�� ���� �� �� W��W�/�� �������� �6������
Gain control valve didefinisikan sebagai perubahan aliran yang melalui control valve terhadap perubahan masukan control valve. =,e �� 10 m3/h =�� �� 0 m3/h
f� �,% � 23.57 � 2.625���20 � 4 ;
1023.57 � 2.625���
f� �,% � 0.625
Besarnya time konstan control valve dapat diperoleh dengan menuliskan persamaan:
h&[ � �[2∆U * q[5 dimana ∆U = Fraksi massa perubahan control valve q[ = Perbandingan time konstan inherent dengan time stroke q[ = 0,03 (untuk jenis actuator diaphragm) q[ = 0,3 (untuk jenis actuator piston) �[ dapat diperoleh dari persamaan berikut
�[ � r&M[
dengan r& = Faktor Stroking time valve = 0,676 M[ = koefisien control valve = 0,39 (untuk jenis positioner I/P)
h&[ � 0,6760,39 �t10 � 0
10 u * 0,3� h&[ � 2,253 Sehingga fungsi transfer dari control valve sebagai berikut:
n 2�5�o2�5 � 0.625
2,253� * 1
- Strainer Berdasarkan data laboratorium didapatkan
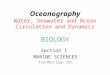
kemampuan absorbsi strainer berdasarkan fungsi waktu sehingga dapat di-plot dalam MINITAB, sebagai berikut:
Time
%absorbsi
9000080000700006000050000400003000020000100000
40
30
20
10
0
S 1.04705
R-Sq 99.4%
R-Sq(adj) 99.4%
Regression
95% CI
95% PI
Fitted Line Plot%absorbsi = 39.03 + 0.000018 Time
- 0.000000 Time**2 + 0.000000 Time**3
Gambar 3.8 Kurva Daya Absorsi Strainer
Berdasarkan persamaan daya absorbsi strainer,
maka didapatkan pemodelan dalam MATLAB – Simulink sebagai berikut :
Gambar 3.9 Wiring Daya Absorsi dan laju aliran
Strainer 3.2.2 Electrolyzer Laju aliran masukan pada electrolyzer menentukan arus yang dialirkan pada elecrolyzer karena arus menentukan banyaknya Cl2 yang dihasilkan dalam proses elektrolisa, sehingga perlu diketahui hubungan antara laju aliran dan arus yang dialirkan, sebagai berikut : Tabel 3.1 Hubungan Laju aliran electrolyzer, arus, dan Cl2
Kondisi Laju Aliran m3/s Arus (A)
Total Cl2 (g/h)
1 Laju_aliran < 1 196 0.0141
2 1 < Laju_aliran < 2 326 0.2669
3 3 < Laju_aliran < 3 456 1.16
4 3 < Laju_aliran < 4 586 2.7
Dari total Cl2 yang dihasilkan, dapat dicari mol Cl2 yang dihasilkan. Pada reaksi elektrolisis berdasarkan kesetimbagan reaksi, besarnya jumlah mol Cl2 yang bereaksi sebanding dengan jumlah mol NaOCl yang bereaksi. Reaksi yang terjadi sebagai berikut:
2NaOH + Cl2 → NaCl + NaClO + H2O Jumlah mol NaOCl diketahui, kemudian
dihitung laju aliran massa NaOCl dan konsentrasi. Dari persamaan mol konsentrasi dan pH, maka

7
didapatkan pemodelan elektrolisis dalam MATLAB-Simulink. 3.2.3 Degassing Tank
Pemodelan degassing tank berdasarkan hukum kesetimbangan massa sebagai berikut:
<@S%U% * SIUIF<� � @G.�_% * G.�_IF � @G ��_% * G ��_IF
Dari model diatas disimulasikan dalam MATLAB dan didapatkan model sebagai berikut:
Gambar 3.11 Simulasi Degassing Tank
Berdasarkan MSDS (Material Safety Data Sheet)
didapatkan Sv,wx% = 1022 kg/m3 sehingga laju aliran NaOCl dapat dimodelkan sebagai berikut:
Gambar 3.12 Simulasi Laju Aliran gas NaOCl
Sedangkan laju aliran masukan gas H2 didapatkan dari
perhitungan mol H2 yaitu sebanding dengan mol NaOCl dengan Sy\= 1.15 kg/m3, sebagai berikut:
Gambar 3.13 Simulasi Laju Aliran gas H2
Gambar 3.14 Simulasi konsentrasi gas H2
3.3 Logic Solver Sebagai Kontroller Pada pengendalian hipochlorination package
ini menggunakan logic solver sebagai controller. Berikut ini dijelaskan logic solver sebagai controller pengendalian flow, tunning arus, pengendalian pH NaOCl, pengendalian level pada degassing tank, dan pengendalian konsentrasi gas hydrogen.
3.3.1 Kontroller pengendalian flow seawater inlet
electrolyzer Dalam pengendalian flow seawater inlet untuk
memanipulasi laju aliran pada flow control valve digunakan logic solver sebagai controller untuk memberikan sinyal control berdasarkan error dari variabel yang terukur dengan setpoint. Berikut ini diagram alur pengendalian flow seawater inlet electrolyzer dengam menggunakan logic solver:
Gambar 3.15 Flowchart Pengendalian Flow Seawater Inlet Electroyzer
Dari flowchart Gambar 3.15 dapat diketahui
bahwa berdasarkan nilai error, controller memberikan sinyal control ke control valve yang kemudian oleh control valve digunakan untuk memanipulasi laju aliran.
3.3.2 Kontroller Tunning Arus Electrolyzer
Pada proses elektrolisis dialirkan arus yang digunakan dalam reaksi. Besarnya arus yang dialirkan pada sel elektrolisis menentukan banyaknya klorin yang dihasilkan pada reaksi ini. Oleh sebab itu untuk memaksimalkan produksi klorin yang terbentuk, arus yang dialirkan ditentukan berdasarkan laju aliran yang masuk pada sel elektrolisis dan digunakan logic solver sebagai controller untuk men-tunning arus yang dialirkan. Berikut diagram alur logic solver sebagai controller tunning arus pada electrolyzer:

8
Gambar 3.16 Flowchart Tunning Arus pada Electrolyzer
3.3.3 Kontroller Pengendalian pH NaOCl
Hasil proses elektrolisis menghasilkan larutan sodium hipoclorite (NaOCl) dan gas hydrogen. Dalam menghambat pertumbuhan biota laut, sodium hypochlorite digunakan sebagai disinfektan yang diinjeksikan pada suction pompa, sehingga diharapkan dapat bereaksi langsung dengan air laut serta biota yang terbawa saat air laut dipompa oleh SWI pumps. Setelah sodium hipochlorite ini berekasi dengan air laut akan dihasilkan free residual chlorine, dimana dalam menjamin kualitas free residual chlorine, pH sodium hypochlorite dipertahankan 8. Oleh sebab itu digunakan logic solver sebagai controller pengendalian pH dengan memberikan sinyal control ke control valve untuk memanipulasi laju aliran larutan asam HBr untuk mempertahankan pH 8. Berikut diagram alur logic solver sebagai controller pengendalian pH NaOCl pada electrolyzer:
Gambar 3.17 Flowchart Pengendalian pH NaOCl
Dari flowchart Gambar dapat diketahui bahwa berdasarkan nilai error, controller memberikan sinyal control ke control valve yang kemudian oleh control valve digunakan untuk memanipulasi laju aliran.
3.3.4 Kontroller Pengendalian Level Degassing Tank
Pada degassing tank terdapat pengendalian level larutan sodium hypochlorite dengan logic solver sebagai controller yang memberikan sinyal control berdasarkan variable yang terukur yaitu level. Sinyal control ini memberikan aksi pada pompa untuk memanipulasi laju aliran yang diinjeksikan pada suction SWI pumps. Berikut ini diagram alur logic solver sebagai controller pengendalian level:
Gambar 3.18 Flowchart Pengendalian Level
Degassing Tank
3.3.5 Kontroller Pengendalian Konsentrasi Gas H2 pada Degassing Tank Produk hasil elektrolisis selain NaOCl
terdapat juga gas hydrogen yang harus dipertahankan konsentrasinya. Hal ini disebabkan hydrogen mudah terbkar diluar batas ambangnya. Oleh sebab itu digunakan logic solver sebagai controller untuk mengendalikan konsentrasi gas hydrogen dengan memberikan sinyal control pada blower untuk memanipulasi laju aliran dilute blower. Berikut ini diagram alur logic solver sebagai controller pengendalian konsentrasi hydrogen:
Gambar 3.19 Flowchart Pengendalian Konsentrasi Gas H2 Degassing Tank

9
IV. ANALISIS DAN PEMBAHASAN 4.1 Pengujian Model Dinamik Komponen Penyusun
Sistem Pengendalian Flow Inlet Electrolyzer Sistem pengendalian flow seawater inlet electrolyzer
ini terdiri dari beberapa komponen diantaranya laju aliran dari SWI pumps, laju aliran menuju basin, strainer, flow transmitter, flow control valve, dan logic solver sebagai controller. Pada pengujian model dinamik dilakukan pengujian masing-masing komponen penyusunnya terlebih dahulu dengan memberikan sinyal uji step. Hal ini bertujuan untuk memvalidasi model matematik yang telah disusun sesuai atau tidak. Kemudian dilakukan pengujian terhadap logic solver sebagai controller dengan memberikan sinyal uji step, merubah-ubah setpoint sehingga mampu menunjukkan bahwa controller dapat melakukan tracking setpoint, dan memberikan beban guna menunjukkan kemampuan dari controller dalam menerima gangguan.
4.1.1 Laju Aliran SWI pumps
Pada bab II dijelaskan bahwa SWI pumps merupakan pompa sentrifugal dengan kapasitas normal rate 850 m3/h. Terdapat tiga buah pompa pada sea water intake ini, namun dalam kondisi normal hanya dua buah pompa yang beroperasi. Berdasarkan data dari Distributed Control System (DCS) didapatkan data laju aliran total SWI pumps yang kemudian diplot dalam minitab seperti pada gambar 3.4, dan didapatkan persamaan laju aliran SWI pumps dalam waktu tertentu. Persamaan tersebut diatas menjadi acuan model matematis yang disimulasikan dalam Matlab. Dan dilakukan pengujian pada model ini dengan memberikan sinyal step didapatkan kurva respon sebagai berikut:
Gambar 4.1 menunjukkan bahwa laju aliran SWI pumps dengan dua buah pompa yang bekerja berkisar antara 1030 m3/h – 1075 m3/h. Kurva ini menunjukkan kondisi SWI pumps dalam kondisi start up hingga menuju stabil. Terlihat pola kondisi transien pompa ini untuk mencapai normal laju aliran namun laju aliran belum mencapai kapasitas normal rate. Hal ini dapat disebabkan karena penjumlahan dua buah pompa yang dipasang secara pararel dalam teori menjelaskan bahwa maksimum laju aliran total lebih kecil dari laju aliran kedua pompa, yakni kurang dari 1700 m3/h. Karena dalam praktiknya didalam pompa terdapat beberapa minor dan mayor loss dari fenomena aliran fluida dan head loss dari pompa tersebut.
Gambar 4.1 Respon Laju Aliran SWI Pumps
4.1.2 Laju Aliran Basin Pada Gambar 2.3 dapat dilihat bahwa laju
aliran SWI pump kemudian menuju Suction Basin dan inlet elctrolyzer. Pada suction basin air laut digunakan untuk me-spray SO2 Scrubber. Berdasarkan data dari Distributed Control System (DCS) didapatkan data laju aliran menuju suction basin yang kemudian diplot pada minitab seperti gambar 3.5, dan didapatkan persamaan laju aliran Basin dalam waktu tertentu. Persamaan tersebut diatas menjadi acuan model matematis yang disimulasikan dalam Matlab. Dan dilakukan pengujian pada model ini dengan memberikan sinyal step didapatkan kurva respon sebagai berikut:
Gambar 4.2 Respon Laju Aliran menuju
Basin Terlihat bahwa laju aliran Basin pada kondisi
start up hingga menuju stabil. Pola kurva yang ditunjukan oleh Gambar 4.2 ini hampir sama dengan pola kurva laju aliran SWI pump pada Gambar 4.1. Namun yang berbeda waktu yang dibutuhkan lebih untuk mencapai stabil lebih lama. Hal ini disebabkan untuk mencapai suction basin diperlukan waktu lebih lama dikarenakan jarak antara SWI pumps dengan suction basin relatif jauh.
4.1.3 Stainer
Sebelum masuk pada electrolyzer, guna mendapatkan kualitas air laut yang bersih, air laut difilter terlebih dahulu pada strainer. Seperti dijelaskan pada bab II, strainer ini menyaring fluida dengan pertimbangkan besar partikel yang diijinkan lolos. Yang diharapkan dalam penyaringan distrainer ini, dapat menyaring benda-benda yang terbawa oleh air laut misalnya lumpur, kerang, batu-batuan kecil, atau bahkan sampah ayng terbawa arus laut. Hal ini dapat meminimalisir kerusakan electrolyzer dan peralatan proses lainnya. Namun dalam kinerjanya strainer ini mempunyai keterbatasan daya absorbs hanya 40%. Dari data laboratorium didapatkan daya absorbs dari strainer yang kemudian pada bab III data ini diplot dalam minitab dan didapatkan kurva pada Gambar 3.8. Persamaan dalam kurva tersebut dijadikan acuan model pada simulink

10
matlab, dan didapatkan hasil kurva respon seperti pada Gambar 4.3.
Gambar 4.3 Respon Daya Absorbsi
Dari kurva Gambar 4.3 dapat dilihat bahwa daya
absorbs dari strainer menurun setiap waktu. Sehingga perlu dilakukan pengecekan dan pembersihan pada strainer tersebut setiap 84600 sekon, atau sehari sekali. Hal ini sesuai dengan informasi yang didapatkan dari lapangan, bahwa dilakukan pembersihan strainer setiap hari.
Adapun laju aliran keluaran dari strainer ditunjukan pada gambar 4.4 yaitu laju aliran keluaran dari strainer naik setiap waktu. Hal ini berlawanan dengan daya absorbs dimana semakin lama daya absorbs menurun sehingga banyak laju aliran yang diijinkan lolos dan mengakibatkan laju aliran keluaran meningkat setiap waktunya.
Gambar 4.4 Respon Laju Aliran Keluaran Strainer
4.1.4 Inlet Electrolyzer
Pada masukan electrolyzer dilakukan modifikasi piping untuk memenuhi kebutuhan laju aliran yaitu 16 inchi menuju Basin dan 12 inchi menuju electrolyzer. Modifikasi piping ini mampu memenuhi kebutuhan laju aliran masukan electrolyzer, yaitu dengan maksimum laju aliran yang diijinkan masuk adalah 10 m3/h.
Gambar 4.5 Respon Inlet Electrolyzer dalam Kondisi
Normal tanpa Control Flow
Setelah melewati strainer, laju aliran masukan electrolyzer inilah nantinya yang akan dipertahankan sesuai dengan kebutuhan electrolyzer untuk memproduksi sodium hypochlorite (NaOCl).
Pengujian pada inlet electrolyzer dilakukan dengan memberikan sinyal step pada masukan laju aliran SWI dan laju aliran Basin. Dalam kondisi normal range laju aliran SWI 0 – 1237.01 m3/h dan Laju aliran Basin 0 – 1227.01 m3/h. Dari pengujian ini didapatkan kurva pada gambar 4.5, yaitu laju aliran masukan electrolyzer pada range 0 – 6.099 m3/h. Hal ini menujukkan bahwa dalam kondisi normal maksimum yang masuk pada electrolyzer 6.099 m3/h yakni dibawah maksimum laju aliran yang didesain.
Pada Kondisi kedua inlet electrolyzer diberi gangguan dengan menaikan laju aliran SWI 0 – 1244.01 m3/h. Dan dapat dilihat pada Gambar 4.2 laju aliran inlet electrolyzer 0 – 10.37 m3/h. Kedua kondisi ini tanpa ada pengendalian flow.
Gambar 4.6 Respon Inlet Electrolyzer dalam Kondisi Gangguan tanpa Control
Flow 4.1.5 Flow Transmitter
Pada pengujian flow transmitter, diberikan sinyal uji step dengan sinyal inputan yang merupakan flow yang tercatat pada spesifikasi range flow yang mampu dicatat oleh flow transmitter yaitu 0 – 3060 m3/h. Pada pengujian ini, dimaksudkan untuk mengetahui tingkat kelogisan model matematis pada flow transmitter.
Gambar 4.7 Respon Flow Trasnmitter dalam
Kondisi Normal Berikut ini adalah grafik respon flow
transmitter. Pada pengujian flow transmitter ini digunakan sinyal step dengan range 0 – 6.099 m3/h pada kondisi normal dan 0 – 10.37 m3/h pada kondisi gangguan.

11
Gambar 4.8 Respon Flow Trasnmitter dalam Kondisi
Gangguan Pada kondisi normal 0 – 6.099 m3/h, flow transmitter
yang terbaca pada 0 – 4.034 mA. Pada kondisi normal 0 – 10.37 m3/h, flow transmitter yang terbaca pada 0 – 4.054 mA.
4.1.6 Flow Control valve
Pada pengujian control valve kali ini, akan diberikan sinyal uji step dengan standar nilai inputan sinyal kontrol, yaitu sebesar 4 - 20 mA. Pada pengujian ini, dimaksudkan untuk mengetahui tingkat kelogisan model matematis pada control valve.
Gambar 4.9 Respon Flow Control valve dalam Kondisi
Normal Pada kondisi laju aliran masukan normal, control
valve menerima sinyal control 14,3 mA yang sebanding dengan laju aliran pada control valve sebesar 3.3 m3/h. Sedangkan pada kondisi diberi gangguan control valve menerima sinyal control maksimum sebesar 20 mA dan sebanding dengan laju aliran control valve 9.98 m3/h.
Gambar 4.10 Respon Flow Control valve dalam Kondisi
Gangguan 4.1.7 Penentuan Logic solver Sebagai Controller
Logic solver pada inlet electrolyzer ini digunakan untuk menentukan sinyal control yang dikirimkan ke control valve untuk memanipulasi bukaan control valve. Ada tiga kondisi error yang digunakan, yaitu dapat dilihat pada Gambar 4.7.
Pada Gambar 3.15 flowchart pengendalian flow seawater inlet electrolyzer diketahui pada kondisi pertama yaitu jika error pengukuran > 0.1431 maka sinyal control u
4 mA, sehingga flow dari control valve 0 m3/h. Pada kondisi kedua jika error diantara 0.1431 – 0.1328 maka controller akan memberikan sinyal control 12.61 mA, sehingga flow pada control valve 1.95 m3/h. Pada kondisi ketiga jika error diantara 0.1328 – 0.1226 maka controller akan memberikan sinyal control 14.4 mA, sehingga flow control valve 2.31 m3/h. Dan jika error pengukuran <= 0.1226 maka controller akan memberikan sinyal control 14.98 mA, sehingga flow control valve 2.22 m3/h.
Dan dari hasil training logic solver pada gambar 4.7 dapat dilihat bahwa saat diberikan masukan 0.1543, 0.1646 dan 0.1748 sebagai error pengukuran, controller memberikan sinyal 4 mA, sesuai dengan yang diharapkan controller, yakni jika error pengukuran > 0.1431 maka sinyal control 4 mA. Pada saat diberikan masukan 0.1226, controller memberikan sinyal 14.98 mA, sesuai dengan yang diharapkan controller, yakni jika error diantara <= 0.1226 maka controller akan memberikan sinyal control 14.98 mA. Pada saat diberikan masukan 0.431, controller memberikan sinyal 12.61 mA, sesuai dengan yang diharapkan controller, yakni jika error diantara 0.1431 – 0.1328 maka controller akan memberikan sinyal control 12.61 mA. Dan saat diberikan masukan 0.1328, controller memberikan sinyal 14.4 mA, sesuai dengan yang diharapkan controller, yakni jika error diantara 0.1328 – 0.1226 maka controller akan memberikan sinyal control 14.4 mA.
4.1.8 Pengendalian Flow dengan Variasi
Setpoint Pada awal bab ini dijelaskan bahwa untuk
menguji kehandalan pengendalian flow yang telah dibangun, dilakukan tracking setpoint dengan memberikan setpoint yang berubah-ubah untuk menguji apakah logic solver yang digunakan mampu mengendalian sistem menuju keadaan yang diinginkan. Dalam penelitian ini dilakukan variasi 3 setpoit yaitu 3.75 m3/h, 4 m3/h dan 4.25 m3/h. Pengujian ini dalam kondisi plant yang sama yaitu pada kondisi normal. Berikut hasil pengujian pengendalian flow berbasis logic solver.
Tabel 4.1 Hasil pengendalian flow berbasis logic solver
Kondisi Sp %Bukaan CV
Ess (%)
Ts (s)
SWI : 0-1237.01 Basin : 0 – 1227.01
3.75 66.08 % 0.053 18.5 s 4 63.52 % 0.875 17.5 s
4.25 61.32 % 0.212 20.8 s Pada Tabel 4.1 didapatkan hasil
pengendalian flow dengan variasi setpoint. Dapat dilihat bahwa pada setpoint 3.75 controller mampu memberikan sinyal control sehingga control valve membuka 66.08 %, error steady state yang didapatkan 0.053%, yakni kurang dari 2 % dari parameter kestabilan, dan settling time 18.5 sekon.

12
Hal ini dapat dinyatakan dengan pengendalian flow berbasis logic solver ini pada setpoint 3.75 controller mampu mencapai kondisi stabil dalam waktu yang cepat. Pada setpoint 4, controller mampu memberikan sinyal control sehingga control valve membuka 63.52%, error steady state yang didapatkan 0.875%, yakni kurang dari 2 % dari parameter kestabilan, dan settling time 17.5 sekon. Hal ini dapat dinyatakan dengan pengendalian flow berbasis logic solver ini pada setpoint 4 controller mampu mencapai kondisi stabil dalam waktu yang lebih cepat. Dan pada setpoint 4.25, controller mampu memberikan sinyal control sehingga control valve membuka 61.32%, error steady state yang didapatkan 0.212%, yakni kurang dari 2 % dari parameter kestabilan, dan settling time 20.8 sekon. Hal ini dapat dinyatakan dengan pengendalian flow berbasis logic solver ini pada setpoint 4.25 controller mampu mencapai kondisi stabil dalam waktu yang lebih lama. Berikut kurva respon yang dihasilkan dalam pengujian tracking setpoint pengendalian flow.
Gambar 4.12 Respon Inlet Electrolyzer dengan tiga
variasi setpoint
4.1.9 Pengendalian Flow dengan Logic solver dengan Pemberian Beban Selain dilakukan tracking setpoint, untuk menguji
kehandalan pengendalian flow yang dibagun, dilakukan pemberian beban berupa kenaikan laju aliran SWI pumps diluar kondisi normal yaitu range laju aliran SWI 0 – 1244.01 m3/h. Dengan pengendalian flow controller mampu mengendalian laju aliran mendekati setpoint yaitu steady pada 4.362 m3/h dan settling time 19.3 sekon. Hal ini dapat dinyatakan bahwa pengendalian flow berbasis logic solver ini dengan pemberian beban, controller mampu mencapai kondisi stabil dalam waktu yang cepat.
Gambar 4.13 Respon Inlet Electrolyzer dalam Kondisi
Gangguan dengan Control Flow
4.2 Pengujian Model Dinamik Komponen Penyusun Sistem Pengendalian pH Sodium Hipochlorite (NaOCl)
Sistem pengendalian pH NaOCl bertujuan guna menjaga pH NaOCl, sehingga NaOCl mampu bereaksi dengan air laut lebih maksimal. Berikut ini pengujian komponen penyusun sistem pengendalian pH NaOCl.
4.2.1 Electrolyzer
Pada electrolyzer masukan berupa laju aliran yang kemudian terjadi proses elektrolisis, dan dihasilkan larutan NaOCl dan gas H2. Adapun parameter yang diperhatikan yaitu laju aliran NaOCl, laju aliran H2, Konsentrasi NaOCl, Konsentrasi H2, dan pH NaOCl. Pada Gambar 4.14 menunjukkan laju aliran NaOCl dan gas H2. Pada kondisi pertama yaitu laju aliran < 1 m3/h, laju aliran NaOCl = 14.8 g/h dan H2 = 0.3972 g/h. Pada kondisi setpoint yaitu kondisi ke-4 saat laju aliran 3-4 m3/h, laju aliran NaOCl = 2833 g/h dan H2 = 76.06 g/h.
Pada Gambar 4.15 menunjukkan konsentrasi NaOCl dan gas H2. Pada kondisi pertama yaitu laju aliran < 1 m3/h konsentrasi NaOCl = 14.8 g/h dan H2 = 0.3972 g/h. Pada kondisi setpoint yaitu kondisi ke-4 saat laju aliran 3-4 m3/h konsentrasi NaOCl = 708.3 g/h dan H2 = 19.01 g/h.
Gambar 4. 16 Respon pH NaOCl
Pada Gambar 4.12 menunjukkan pH
NaOCl. Terlihat bahwa pH NaOCl diatas 9 dan hampir 12. Hal ini menghasilkan kualitas yang kurang baik jika direaksikan dengan air laut yang memiliki pH = 8. Larutan menjadi lebih jenuh dan akibatnya banyak free residual chlorine yang terbuang dan mencemari laut.
4.2.2 Logic solver Sebagai Controller Tunning
Arus Pada electrolyzer, logic solver digunakan
sebagai controller untuk mentunning arus yang dialirkan pada sel elektrolisis. Besarnya arus ini sebanding dengan banyaknya klorin yang akan terbentuk dalam proses elektrolisis. Gambar 4.13 menunjukkan hasil respon control tunning arus dengan menggunakan logic solver. Terlihat bahwa pada kondisi 1 klorin yang terbentuk 0.0141 dan pada kondisi setpoint yaitu kondisi keempat klorin yang terbentuk 2.7.

13
Gambar 4.17 Respon Tunning Arus Untuk Menentukan Total Chlorine yang Terbentuk
4.2.3 Logic solver Sebagai Controller pH Control
Logic solver juga digunakan sebagai controller untuk pengendalian pH. Logic solver ini menentukan sinyal control berdasarkan nilai error pengukuran pH antara nilai pengukuran dan setpoint. Gambar 4.18 menunjukkan pH NaOCl tanpa pengendalian pH, terlihat pH diatas 9. Pada Gambar 4.14 terlihat respon pH NaOCl pada kondisi normal dengan pengendalian pH mampu menurunkan pH hingga 8.
Gambar 4.18 Respon pH NaOCl dengan pengendalian pH
dalam Kondisi Normal Dan pada saat dalam kondisi diberikan gangguan, pH hanya mampu turun hingga 8.832.
Gambar4.19 Respon pH NaOCl dengan pengendalian pH
dalam Kondisi Gangguan
Dalam kondisi pH sekitar 8 ini diharapkan sodium hypochlorite mampu bereaksi lebih maksimum dengan air laut, dan dapat memenuhi residual free chlorine yang ditentukan. Hal ini berdampak pada kualitas dalam menghambat pertumbuhan biota laut dan dapat mengakibatkan pencemaran laut jika residual free chlorine diluar ketentuan lingkungan. 4.3 Pengujian Model Dinamik Sistem Pengendalian
pada Degassing Tank Setelah proses elektrolisis, kemudian hasil dari
elektrolisis ini ditampung dalam degassing tank. Seperti yang dijelaskan pada bab II bahwa Degassing tank mampu
mengakomodasi larutan sodium hipoklorit dan pelepasan gas hydrogen dengan cara dilute blower. Sehingga degassing tank terdapat pengendalian level NaOCl dengan menggunakan logic solver sebagai controller. Logic solver ini mengirimkan sinyal control ke dosing pompa untuk memanipulsi laju aliran pompa. Pada simulasi close loop didapatkan level yang dapat dijaga < 7.7 m3 yaitu dalam kondisi normal.
Selain pengendalian level, konsentrasi gas hydrogen dipertahankan dalam ambang batasnya. Pengendalian konsentrasi gas H2 ini juga menggunakan logic solver sebagai controller. Logic solver menentukan sinyal control ke blower untuk memanipulasi laju aliran blower. Dari simulasi close loop didapatkan konsentrasi gas hydrogen dapat dipertahankan 3.5 % gas H2 dan termasuk dibawah batas ambang bawah gas H2.
V. KESIMPULAN DAN SARAN
1. Kesimpulan
Berdasarkan simulasi perancangan sistem pengendalian flow seawater inlet dan pH NaOCl hipochlorination package di HESS (Indonesia-Pangkah), dapat diambil kesimpulan bahwa : 1. Dilakukan modifikasi piping percabangan
menuju suction basin dan electrolyzer berdasarkan kebutuhan laju aliran, yakni 16” inchi menuju suction basin dan 12” menuju electrolyzer dengan laju aliran max 10 m3/h.
2. Diperoleh suatu rancangan sistem pengendalian flow seawater inlet dan pH control dengan kontroller yang digunakan berupa logic solver. Masukan controller berupa error antara pengukuran dan setpoint. Sedangkan keluaran logic solver berupa sinyal control menuju control valve untuk memanipulasi laju aliran.
3. Pada pengujian sistem pengendalian flow didapatkan laju aliran inlet electrolyzer dapat terpenuhi, yaitu: - Pada setpoint 3,75 %bukaan valve
66,08%, Error steady state 0.053 % dan time settling 18.5 sekon
- Pada setpoint 4 %bukaan valve 63.52%, Error steady state 0.875 % dan time settling 17.5 sekon
- Pada setpoint 4.25 %bukaan valve 61.32%, Error steady state 0.212 % dan time settling 20.8 sekon
4. Pengendalian flow yang terpenuhi berdampak pada hasil elektrolisis, dengan set arus maksimum didapatkan total klorin maksimum yakni 2.7 g/h sehingga konsentrasi NaOCl 708 mg/mL, namun pH NaOCl mendekati 10.
5. Pada pengendalian pH NaOCl dengan menambahkan larutan asam HBr dengan %bukaan valve 3.811% didapatkan pH 8 dan error steady state 0.0004%.

14
5.2 Saran Dalam rangka pengembangan penelitian, saran yang perlu disampaikan dalam laporan Tugas Akhir ini adalah dalam penelitian selanjutnya perlu dikaji banyaknya biota yang terbawa dalam satuan volume, sehingga NaOCl yang diinjeksikan bisa lebih optimal.
DAFTAR PUSTAKA
[1] Amri., Totok., S., 2010. Perancangan Sistem Pengendalian Pembakaran Pada Duct Burner Waste Heat Boiler (WHB) Berbasis Logic Solver. Tugas Akhir Jurusan Teknik Fisika- ITS
[2] Fox, Robert, Alan T., and Philip J.P, 2003. Introduction to Fluid Dynamics, Sixth Edition . John Willey & Sons, Inc, United States of America.
[3] Gunterus, Frans. 1994. Falsafah Dasar Sistem Pengendalian Proses. Jakarta. PT. Elex Media Komputindo
[4] Help MATLAB Simulink R2009a, Programming a Truth Table.
[5] Incropera, F.P. and DeWitt, D.Pd, 1996. Introduction to Heat Transfer. John Wiley and Sons Inc., USA
[6] Manual Book Operating and Control Philosophy for Onshore Processing Facility, HESS (Indonesia-Pangkah), Ltd.
[7] Liptak, B.L. 2006. Instrument Engineers' Handbook, Fourth Edition, Volume Two- Process Control and Optimization
[8] Ogata, Katsuhiko. 2002. Modern Control Engineering, Fourth Edition. Prentice-Hall, Inc. United States of America
[9] Rajagopal, Sanjeevi. 2002. How effective is intermittent chlorination to control adult mussel fouling in cooling water systems?. Water – Research
[10] www.electrichlor.com [11] www.tiaano.com/tiaano_cl2.htm [12] www.id.wikipedia.org/wiki/Ambang_ledakan [13] http://id.wikipedia.org/wiki/Mol BIODATA PENULIS
Nama : Ike Meillina Putri TTL : Surabaya, 8 Mei 1989 Riwayat Pendidikan: Tek. Fisika ITS Surabaya 2007 – sekarang SMA Negeri 1 Tuban 2004 – 2007 SMP Negeri 1 Tuban 2001 – 2004 SDN Kaliasin III Surabaya 1995 – 2001