Embed Size (px)
Citation preview

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
CHƯƠNG 3: CHỈNH LƯU ĐIỀU KHIỂN
Chỉnh lưu một pha, ba pha không điều khiển, được trình bày ở chương trước,
không cho phép điều khiển điện năng được biến đổi từ xoay chiều (ac) thành một
chiều (dc). Khả năng biến đổi điện năng này có thể thực hiện được nhờ sử dụng các
thyristor công suất trong mạch chỉnh lưu. Chương này đề cấp đến hai loại cơ bản của
chỉnh lưu điều khiển là: chỉnh lưu một pha điều khiển và chỉnh lưu ba pha điều khiển.
Cả hai dạng chỉnh lưu điều khiển đều được áp dụng trong phần lớn các thiết bị điện.
3.1. Chỉnh lưu một pha điều khiển
Chỉnh lưu một pha điều khiển ngày càng được phạm vi ứng dụng rộng lớn. Như
trên hình 3-1, chỉnh lưu một pha điều khiển có thể phân chia thành hai nhóm lớn:
(i) Các cấu trúc hoạt động với tần số chuyển mạch thấp, còn được biết với cái
tên chỉnh lưu điều khiển chuyển mạch tuần tự.
(ii) Những sơ đồ mạch làm việc với tần số cao, còn được gọi điều chỉnh hệ số
công suất (power factor corrector - PFC).
Thời gian gần đây, xuất hiện nhiều quan tâm đến việc kiểm soát sóng hài bậc
cao ở phía dòng điện xoay chiều cấp cho chỉnh lưu. Đây chính là nguyên nhân chủ yếu
cho sự phát triển các hệ thống điều chỉnh hệ số công suất (PFC). Những sơ đồ mạch
này sử dụng transistor công suất, làm việc với tần số cao để cải thiện chất lượng dạng
sóng dòng điện xoay chiều, từ đó nâng cáo hệ số công suất. Chỉnh lưu hệ số công suấ
cao được chia thành loại tái tạo và không tái tạo.
Hình 3-1: Phân loại chỉnh lưu một pha điều khiển
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
3.1.1. Chỉnh lưu điều khiển chuyển mạch tuần tự
3.1.1.1. Chỉnh lưu một pha nửa sóng
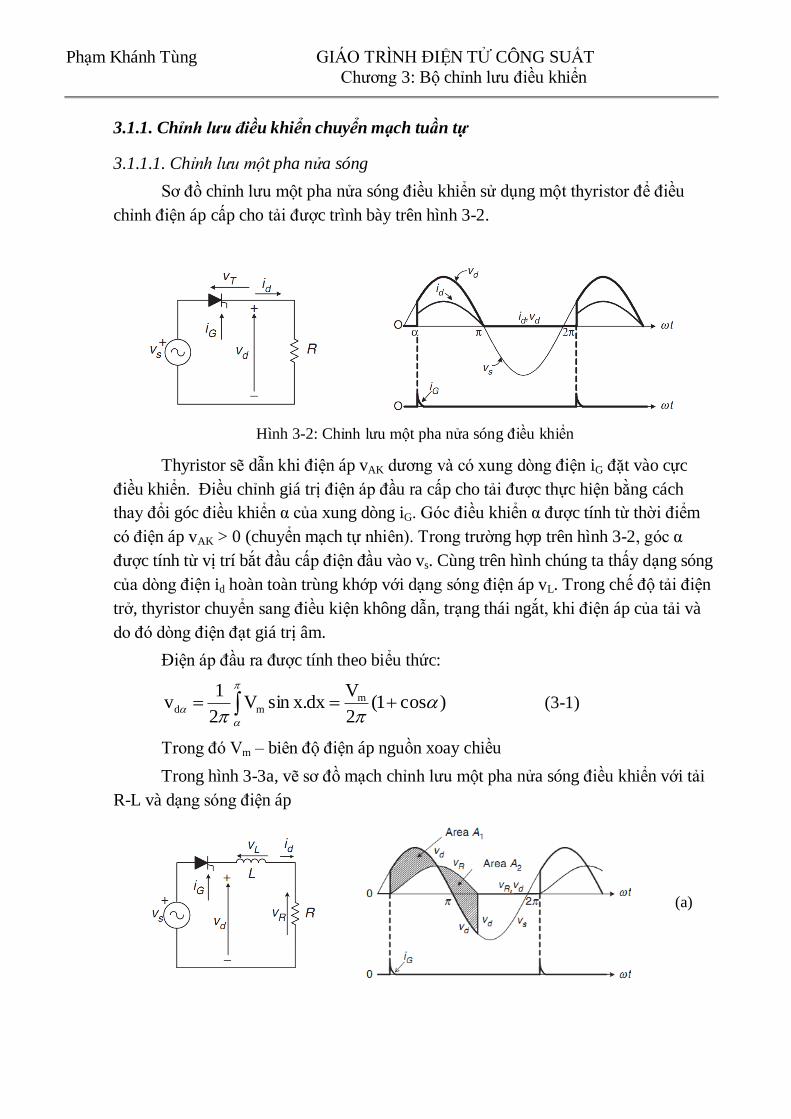
Sơ đồ chỉnh lưu một pha nửa sóng điều khiển sử dụng một thyristor để điều
chỉnh điện áp cấp cho tải được trình bày trên hình 3-2.
Hình 3-2: Chỉnh lưu một pha nửa sóng điều khiển
Thyristor sẽ dẫn khi điện áp vAK dương và có xung dòng điện iG đặt vào cực
điều khiển. Điều chỉnh giá trị điện áp đầu ra cấp cho tải được thực hiện bằng cách
thay đổi góc điều khiển α của xung dòng iG. Góc điều khiển α được tính từ thời điểm
có điện áp vAK > 0 (chuyển mạch tự nhiên). Trong trường hợp trên hình 3-2, góc α
được tính từ vị trí bắt đầu cấp điện đầu vào vs. Cùng trên hình chúng ta thấy dạng sóng
của dòng điện id hoàn toàn trùng khớp với dạng sóng điện áp vL. Trong chế độ tải điện
trở, thyristor chuyển sang điều kiện không dẫn, trạng thái ngắt, khi điện áp của tải và
do đó dòng điện đạt giá trị âm.
Điện áp đầu ra được tính theo biểu thức:
)cos1(2
Vdx.xsinV
2
1v m
md
(3-1)
Trong đó Vm – biên độ điện áp nguồn xoay chiều
Trong hình 3-3a, vẽ sơ đồ mạch chỉnh lưu một pha nửa sóng điều khiển với tải
R-L và dạng sóng điện áp
(a)

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
(b)
Hình 3-3: Chỉnh lưu một pha nửa sóng điều khiển với tải a) tải thụ động RL b) tải có
nguồn
Khi Thyristor mở (dẫn điện) điện áp rơi trên điện cảm:
dt
diLvvv d
RsL (3-2)
Trong đó vR – điện áp rơi trên điện trở, dR i.Rv
Nếu vs – vR > 0, từ công thức 3-2 có thể thấy dòng điện tải tăng, trường hợp
ngược lại dòng điện tải giảm khi vs – vR < 0.
Dòng điện có thể được xác định theo:
t
Ld dxvL
1)t(i
(3-3)
Từ biểu thức 3-3, giải theo phương pháp đồ thị ta có thể thấy rằng dòng điện id
= 0 khi diện tích phần A1 và A2 bằng nhau (vs = vR) điều này cho thấy thyristor vẫn
dẫn điện mặc dù vs < 0 (do có điện áp trên L).
Khi tải gồm điện cảm và nguồn áp (điện cảm tích cực) được nối với bộ chỉnh
lưu, như trình bày trên hình 3-3b. Thyristor sẽ mở khi có xung dòng iG vào cực điều
khiển khi vs > Ed. Tương tự như trương hợp R-L, Thyristor vẫn giữ nguyên trạng thái
dẫn cho đến khi A1 = A2. Khi Thyristor tắt (khóa) điện áp trên tải vd = Ed.
3.1.1.2. Chỉnh lưu hai pha nửa sóng
Sơ đồ trên hình 2-13, sử dụng điểm giữa cuộn thứ cấp máy biến áp chia điện áp
thứ cấp thành v1 và v2. Các điện áp này lệch pha 180o, và nhận điểm giữa làm điểm
trung tính. Dòng điện qua các thyristor T1 và T2 vào lúc điện áp tương ứng v1 và v2
dương, khép mạch qua tải và trở về điểm trung tính.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-4: Chỉnh lưu hai pha nửa sóng có điều khiển tải R
Như trên sơ đồ trong hình 3-4, Thyristor T1 có thể được bật trong toàn bộ thời
gian khi v1 > 0, xung điều khiển trễ một góc α quyết định thời điểm bật T1. Trạng thái
bật của mỗi Thyristor được thể hiện trên đồ thị hình 3-4. Các van tiếp tục dẫn trong
chu kỳ của mình cho đến khi điện áp ngược xuất hiện trên van.
Giá trị điện áp trên tải được tính theo biểu thức
)cos1(V
dx.xsinV1
v mmdi
(3-4)
Dòng điện xoay chiều is bằng iT1(N2/N1) khi T1 dẫn và iT2(N2/N1) khi T2 dẫn,
trong đó N2/N1 là tỉ số vòng dây cuộn thứ cấp và sơ cấp.
Ảnh hưởng của hệ số thời gian tải liên tục TL = L / R với tải bình thường đối với
độ gợn sóng RRd i/)t(i/)t(i
khi góc mở α = 0o được thể hiện trên hình 3-5. Độ gợn
sóng của dòng tải giảm khi hệ số thời gian tải liên tục tăng, và nếu L → ∞, dòng điện
được lọc phẳng hoàn toàn.
Hình 3-5: Ảnh hưởng của hằng số thời gian tải liên tục

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
3.1.1.3. Chỉnh lưu cầu một pha
Điều khiển chỉnh lưu cầu một pha có hai phương án: điều khiển sử dụng 4
Thyristor (hình 3-6a) và bán điều khiển (điều khiển một phần) sử dụng 2 Thyristor và
2 Diode (hình 3-6b).
(a)
(b)
Hình 3-6: Chỉnh lưu cầu một pha a) điều khiển b) bán điều khiển
Dạng sóng điện áp và dòng điện của chỉnh lưu cầu điều khiển với tải điện trở R
được vẽ trên hình 3-6a. Các van T1 và T2 phải được mở đồng thời trong nửa sóng
dương của điện áp vs, dẫn dòng. Tương tự, các van T3, T4 cũng được mở đồng thời
trong nửa sóng điện áp nguồn âm. Để đảm bảo tính đồng thời bật của các van T1 và T2
người ta dùng chung một dòng kích mở. Điện áp trên tải tương tự như với trương hợp
hai pha nửa sóng đã xét ở trên. Dòng điện xoay chiều:
4T1Ts iii (3-5)
Với dạng sóng được vẽ trên hình 3-7.
Hình 3-8 trình bày dạng sóng dòng và áp của trường hợp chỉnh lưu cầu một pha
điều khiển với tải điện trở và điện cảm (L → ∞). Giá trị điện cảm lớn đảm bảo lọc
phẳng hoàn toàn dòng điện chỉnh lưu tại tải cũng như dòng điện xuay chiều nguồn vào.
Do dòng điện tải liên tục, các Thyristor T1, T2 vẫn giữ nguyên trạng thái mở mặc dù
nửa chu kỳ dương của điện áp nguồn vs đã qua. Do nguyên nhân này, điện áp trên tải
vd có thể có giá trị tức thời âm. Việc bật các Thyristor T3, T4 mang lại 2 kết quả: Tắt
các van T1, T2; sau khi chuyển mạch T3, T4 dẫn dòng điện tải.
Dòng điện xoay chiều nguồn có dạng xung vuông như trên hình 3-8, trong điều
kiện dòng điện liên tục. Trường hợp đó điện áp trung bình trên tải:
cosV2
dx.xsinV1
v mmdi
(3-6)

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-7: Dạng sóng dòng, áp của chỉnh lưu cầu một pha điều khiển với tải R
Hình 3-8: Dạng sóng dòng, áp chỉnh lưu cầu một pha điều khiển với tải R-L (L→∞)
3.1.1.4. Phân tích dòng điện nguồn xoay chiều
Xét trường hợp mạch lọc điện cảm có trị số rất cao trong chỉnh lưu cầu một pha
điều khiển, dòng điện nguồn xoay chiều bị lọc và trở thành dạng xung vuông. Ngoài ra
dòng điện is còn bị lệch pha so với điện áp vs một góc α, bằng góc kích mở van công

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
suất. Dòng điện nguồn xoay chiều có thể biểu diễn theo phân tích Fourier, giá trị của
các bậc hài được xác định:
n
I4I d
)nmax(.s
(3-7)
(n = 1, 3, 5, …)
Trị hiệu dùng của các thành phần hài bậc n:
n
I22
2
II d)nmax(.s
)n(s
(3-8)
Như vậy trị hiệu dụng thành phần cơ bản:
dd)1(s I9,0I22
I
(3-9)
Trên hình 3-9a, ta có thể thấy góc lệch pha của thành phần cơ bản φ1 đúng bằng
góc kích mở α và hình 3-9b là phổ các thành phần sóng hài và chỉ các thành phần bậc
lẻ mới suy giảm biên độ khi tần số tăng.
(a)
(b)
Hình 3-9: Dòng điện nguồn xoay chiều chỉnh lưu cầu một pha có điều khiển (a) dạng sóng
và (b) phổ các thành phần sóng hài
Trị hiệu dụng của dòng điện nguồn xoay chiều:
ds II (3-10)
Độ méo dạng tổng (THD):
%4,48100I
IITHD
s
2
1s
2
s
(3-11)
3.1.1.5. Hệ số công suất của chỉnh lưu
Từ đồ thị hình 2-18a, góc lệch pha giữa dòng và áp của thành phần cơ bản và
góc kích mở van công suất bằng nhau (φ1 = α)
coscos 1 (3-12)
Công suất tác dụng của dòng điện không sin, được cấp từ nguồn sin một pha:

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
11ss
T
o
ss cosI.Vdt)t(i)t(vT
1P (3-13)
Công suất biểu kiến
ss I.VS (3-14)
Hệ số công suất PF
S
PPF (3-15)
Nếu thay các biểu thức 3-12, 3-13, 3-14 và biểu thức 3-15, ta được
cosI
IPF
s
1s (3-16)
Biểu thức này cho thấy, với dòng điện nguồn xoay chiều không sin, hệ số công
suất của chỉnh lưu chịu tác động xấu của cả góc mở α và độ biến dạng méo của dòng
điện nguồn. Kết quả độ biến dạng dòng điện nguồn tăng lên sẽ làm tăng trị hiệu dụng
Is và theo 3-16, giảm hệ số công suất.
3.1.1.6. Quá trình chuyển mạch của Thyristor
Cho tới giờ quá trình chuyển mạch giữa các Thyristor được xem như diễn ra tức
thời. Tuy nhiên điều này lại không xảy ra trong thực tế do tính chất điện cảm của mạch
nguồn như trên hình 3-10a. Trong quá trình chuyển mạch, dòng điện qua các Thyristor
không đổi ngay lập tức, vì thế tồn tại một góc chuyển mạch μ nào đó mà cả 4 thyristor
đồng thời dẫn. Vì thế trong quá trình chuyển mạch hệ quả của hiện tượng đồng dẫn
làm cho điện áp trên tải bằng 0.
0vd khi t (3-17)
Do ảnh hưởng của quá trình chuyển mạch, dạng sóng của dòng, áp nguồn, dòng
tải có dạng như trên hình 3-10b.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-10: Quá trình chuyển mạch a) sơ đồ b) dạng sóng
Trong quá trình chuyển mạch, điện áp được biểu diễn theo biểu thức
tsinVvdt
diL ms
s với t (3-18)
Lấy tích phân cả hai vế trong thời gian chuyển mạch, ta có:
/)(
/
m
I
I
s tdtsinL
Vdi
d
d
(3-19)
Giải phương trình tìm được giá trị μ
d
m
IV
L2cos)cos(
(3-20)
Biểu thức 3-20 cho thấy nếu tăng điện cảm nguồn hoặc tăng dòng điện tải đều
dẫn đến tăng góc chuyển mạch μ. Ngoài ra, góc chuyển mạch còn bị ảnh hưởng từ góc
kích mở thyristor, biểu thức 3-18 cho thấy với góc kích mở khác nhau thì điện áp
nguồn có giá trị tức thời khác nhau làm cho dis/dt có các giá trị khác nhau dẫn đến thay
đổi thời gian chuyển mạch.
Biểu thức 3-17 và dạng sóng trong hình 3-10b cho thấy quá trình chuyển mạch
làm giảm điện áp trung bình trên tải Vdα. Nếu kể đến chuyển mạch, biểu thức điện áp
tải được tính theo biểu thức
cos)cos(V
)t(d)tsin(1
V md
(3-21)
Thay 3-20 vào 3-21
dmd IL2
cosV2
V
(3-22)

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
3.1.1.7. Chế độ nghịch lưu
Khi góc kích mở α > 90o, điện áp trung bình trên tải có thể đạt giá trị âm.
Trường hợp này công suất được truyền ngược từ tải sang nguồn xoay chiều. Chế độ
làm việc này được gọi là chế độ nghịch lưu, bởi vì năng lượng được truyền từ phía một
chiều (dc) sang phía xoay chiều (ac). Trong thực tế, chế độ này có thể gặp ở các mạch
mà tải được bố trí như trên hình 3-11a. Cần lưu ý rằng chỉnh lưu chỉ cho phép dòng
điện đi theo một chiều. Trong hình 3-11b là dạng sóng điện áp tải ở chế độ nghịch lưu
khi bỏ qua điện cảm nguồn L.
Phần trước đã giải thích rõ ràng ảnh hưởng của điện cảm nguồn L làm tăng thời
gian chuyển mạch μ. Như trên hình 3-11c, điện áp trên thyristor vT1 sẽ có giá trị âm
trong khoảng γ, được xác định theo biểu thức:
)(180 (3-23)
Để đảm bảo thyristor đóng và phục hồi hoàn toàn tính ngược sau khi chuyển
mạch, góc γ phải thỏa mãn biểu thức:
qt. (3-24)
Trong đó ω – tần số nguồn điện và tq – thời gian đóng thyristor.
Nếu như qt. , thyristor chưa đóng hoàn toàn đã được đặt điện áp thuận sẽ
dẫn. Từ đó góc kích mở lớn nhất có thể áp dụng:
180max (3-25)
Nếu điều kiện của biểu thức 3-25 không được đáp ứng, quá trình chuyển mạch
không hoàn thành có thể tạo nên dòng điện phá hủy mạch chỉnh lưu.
Hình 3-11: Chỉnh lưu trong chế độ Inverter a) sơ đồ mạch b) dạng sóng khi bỏ qua điện cảm c)
dạng sóng khi có tính tới điện cảm L

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
3.1.1.8. Các ứng dụng
Ứng dụng quan trọng bậc nhất của chỉnh lưu điều khiển bao gồm thiết bị cấp
nguồn liên tục (uninterruptible power supplies – UPS) dùng cấp nguồn cho các tải
quan trọng. Hình 3-12 mô tả sơ đồ khối đơn giản của UPS, thiết kế với công suất nhỏ
hơn 10kVA. Các bộ chỉnh lưu nguồn (điều khiển hoặc bán điều khiển) tạo nguồn điện
một chiều hoặc phận xạc ắc quy của UPS. Đầu ra của mạch nghịch lưu có bộ phận lọc
trước khi cấp cho tải.
Hình 3-12: Ứng dụng chỉnh lưu có điều khiển trong UPS
Các chế độ làm việc của UPS:
(i) Chế độ bình thường: Trường hợp sử dụng điện áp lưới. Tải được cung cấp từ
nguồn thông qua hệ thống Chỉnh lưu – Nghịch lưu và lọc. Mạch chỉnh lưu xạc ắc qui.
(ii) Chế độ cắt điện: Trường hợp không có điện áp lưới. Tải được cung cấp từ
ắc qui thông qua hệ thống Nghịch lưu và lọc.
(iii) Chế độ Bypass: Trường hợp tải cần công suất lớn hơn công suất cả
Inverter, hệ thống Bypass đóng nguồn trực tiếp đến tải.
Điều khiển động cơ một chiều công suất nhỏ là ứng dụng phổ biến của chỉnh
lưu cóa điều khiển. Trên sơ đồ hình 3-13, thiết bị chỉnh lưu có điều khiển sẽ điều chỉnh
điện áp phần ứng và do đó điều khiển được dòng điện cấp cho động cơ để có được mô
men quay theo yêu cầu.
Cấu trúc này chỉ cho dòng điện đi vào động cơ theo một chiều trong khi điện áp
trên động cơ lại có thể đạt được cả giá trị âm và dương. Chính vì vậy mạch chỉ làm
việc ở hai góc phần tư của hệ trục id và Vdα.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-13: Điều khiển động cơ một chiều hai góc phần tư: (a) sơ đồ mạch
(b) góc phần tư làm việc
Mạch có đặc tính tốt hơn sử dụng 2 bộ chỉnh lưu có điều khiển mắc ngược nhau
với nhánh có động cơ như trên hình 3-14. Cấu trúc này thường được gọi là Inverter và
có thể làm việc ở cả 4 góc phần tư. Bộ chỉnh lưu 1 cấp dòng điện dương, bộ chỉnh lưu
2 cấp dòng điện âm (ngược chiều). Động cơ có thể làm việc ở các chế độ quay thuận
(sinh công), quay thuận (hãm), quay ngược (sinh công) và quay ngược (hãm)
Hình 3-14: Four-quadrant dc drive: (a) circuit and (b) quadrants of operation
3.1.2. Điều chỉnh hệ số công suất chỉnh lưu một pha điều khiển
3.1.2.1. Các vấn đề liên quan đến hệ số công suất
Những nhược điểm chính của chỉnh lưu một pha chuyển mạch: (i) gây nên
chậm pha của dòng với điện áp ảnh hưởng đến công suất hữu ích; (ii) tạo ra lượng
sóng hài nguồn xoay chiều. Làm giảm hệ số công suất và công suất tác dụng. Gần đây,
chỉnh lưu một pha được sử dụng rộng rãi làm tăng các vấn đề chất lượng hệ thống
điện. Ví dụ, trong tòa nhà thương mại có thể có 50% thậm chí 90% số thiết bị không
sử dụng trực tiếp dòng điện xoay chiều mà phải qua bộ chỉnh lưu. Nhiều bộ chỉnh lưu
có hệ số méo dạng tổng dòng điện THDi > 40%, là nguồn gốc gây nên sự quá tải trầm
trọng trên đường truyền và máy biến áp.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Sơ đồ chỉnh lưu một pha với tụ lọc (hình 3-15), được sử dụng rộng rãi trong các
thiết bị công suất thấp. Dòng điện xoay chiều nguồn có dạng như trong hình 3-15b,
trong đó có méo dạng cao do tác động của tụ lọc điện áp. Các sóng hài bậc cao trong
hình 3-16 và bảng 3-1 và hệ số méo dạng THDi = 197%.
Bộ chỉnh lưu trên hình 3-15 có hệ số công suất rất thấp PF = 0,45 do có lượng
lớn sóng hài.
Hình 3-15: Chỉnh lưu một pha a) sơ đồ b) dạng sóng dòng điện xoay chiều nguồn
Hình 3-16: Các thành phần sóng hài của chỉnh lưu cầu một pha
Bảng 3-1: Thành phần sóng hài của dòng điện trong hình 3-16
Bậc 3 5 7 9 11 13 15 17 19 21
In /I1 [%] 96.8 90.5 81.7 71.0 59.3 47.3 35.7 25.4 16.8 10.6
3.1.2.2. Tiêu chuẩn sóng hài bậc cao trong chỉnh lưu một pha
Những vấn đề liên quan có nguồn gốc từ sóng hài của bộ chỉnh lưu một pha
điều khiển thúc đẩy các tổ chức đưa ra những tiêu chuẩn về sóng hài cho các bộ biến
đổi điện năng. Tiêu chuẩn quốc tế IEC 61000-3-2: Class D thiết lập giới hạn cho các
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
bộ biến đổi một pha công suất thấp bao gồm dòng điện xoay chiều đầu vào theo “dạng
sóng đặc biệt” và công suất tác dụng đầu vào P ≤ 600 W. Thiết bị trong Class D có
dạng sóng dòng điện đầu vào nằm trong giới hạn “envelope” thể hiện trong hình 3-
15b. Những thiết bị nhóm này phải đáp ứng giới hạn sóng hài nhất định, được trình
bày trong hình 3-16. Rõ ràng có thể thấy, sơ đồ chỉnh lưu một pha điều khiển, trong
hình 3-15a, với các thông số không đáp ứng tiêu chuẩn IEC 61000-3-2 Class D. Và để
đáp ứng tiêu chuẩn này chỉ có cách bổ xung thêm bộ phận lọc thụ động đủ lớn, làm
tăng kích thước và giá thành bộ chỉnh lưu. Sự ra đời của tiêu chuẩn này thúc đẩy quá
trình phát triển các phương pháp mới cải thiện và nâng cao chất lượng dòng điện xoay
chiều đầu và đồng thời nâng cao hệ số công suất.
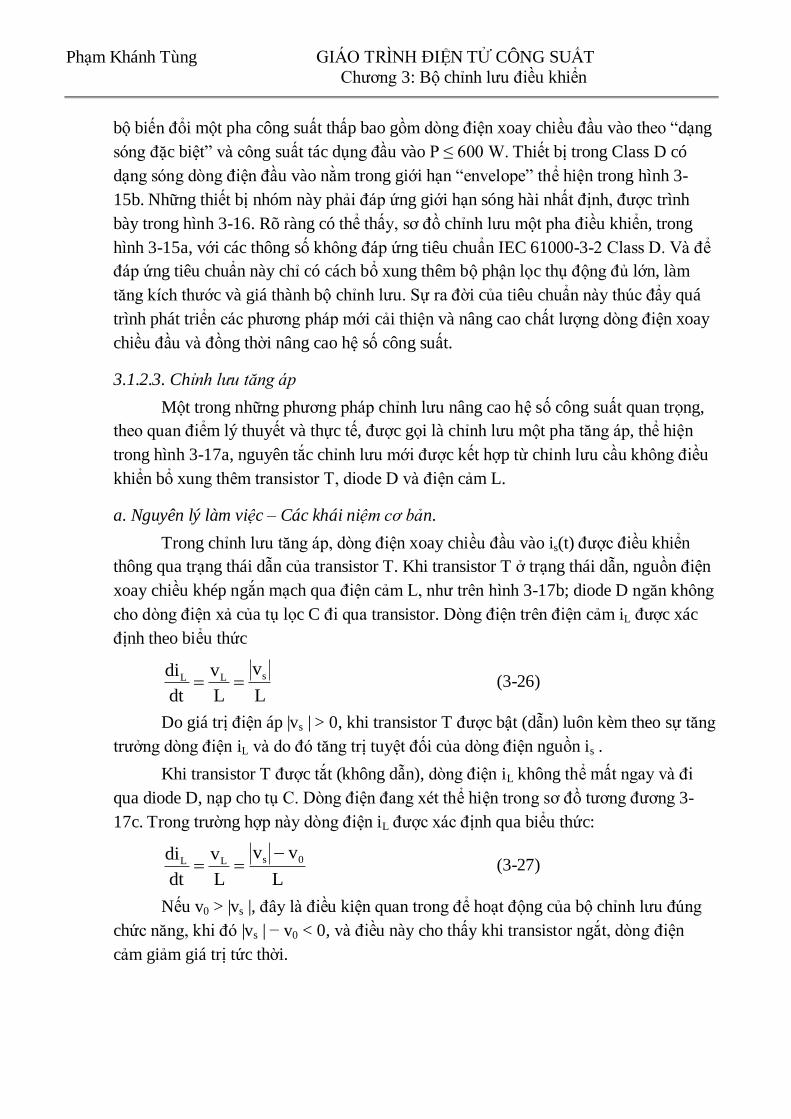
3.1.2.3. Chỉnh lưu tăng áp
Một trong những phương pháp chỉnh lưu nâng cao hệ số công suất quan trọng,
theo quan điểm lý thuyết và thực tế, được gọi là chỉnh lưu một pha tăng áp, thể hiện
trong hình 3-17a, nguyên tắc chỉnh lưu mới được kết hợp từ chỉnh lưu cầu không điều
khiển bổ xung thêm transistor T, diode D và điện cảm L.
a. Nguyên lý làm việc – Các khái niệm cơ bản.
Trong chỉnh lưu tăng áp, dòng điện xoay chiều đầu vào is(t) được điều khiển
thông qua trạng thái dẫn của transistor T. Khi transistor T ở trạng thái dẫn, nguồn điện
xoay chiều khép ngắn mạch qua điện cảm L, như trên hình 3-17b; diode D ngăn không
cho dòng điện xả của tụ lọc C đi qua transistor. Dòng điện trên điện cảm iL được xác
định theo biểu thức
L
v
L
v
dt
di sLL (3-26)
Do giá trị điện áp |vs | > 0, khi transistor T được bật (dẫn) luôn kèm theo sự tăng
trưởng dòng điện iL và do đó tăng trị tuyệt đối của dòng điện nguồn is .
Khi transistor T được tắt (không dẫn), dòng điện iL không thể mất ngay và đi
qua diode D, nạp cho tụ C. Dòng điện đang xét thể hiện trong sơ đồ tương đương 3-
17c. Trong trường hợp này dòng điện iL được xác định qua biểu thức:
L
vv
L
v
dt
di 0sLL
(3-27)
Nếu v0 > |vs |, đây là điều kiện quan trong để hoạt động của bộ chỉnh lưu đúng
chức năng, khi đó |vs | − v0 < 0, và điều này cho thấy khi transistor ngắt, dòng điện
cảm giảm giá trị tức thời.
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
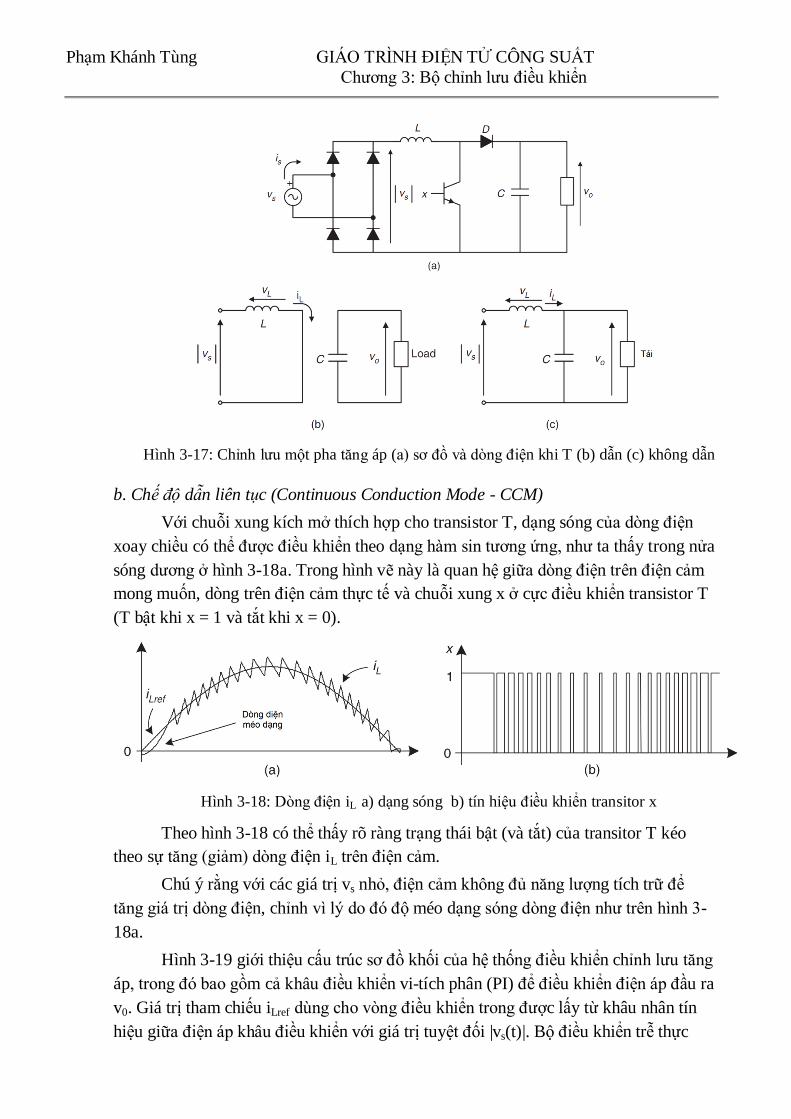
Hình 3-17: Chỉnh lưu một pha tăng áp (a) sơ đồ và dòng điện khi T (b) dẫn (c) không dẫn
b. Chế độ dẫn liên tục (Continuous Conduction Mode - CCM)
Với chuỗi xung kích mở thích hợp cho transistor T, dạng sóng của dòng điện
xoay chiều có thể được điều khiển theo dạng hàm sin tương ứng, như ta thấy trong nửa
sóng dương ở hình 3-18a. Trong hình vẽ này là quan hệ giữa dòng điện trên điện cảm
mong muốn, dòng trên điện cảm thực tế và chuỗi xung x ở cực điều khiển transistor T
(T bật khi x = 1 và tắt khi x = 0).
Hình 3-18: Dòng điện iL a) dạng sóng b) tín hiệu điều khiển transitor x
Theo hình 3-18 có thể thấy rõ ràng trạng thái bật (và tắt) của transitor T kéo
theo sự tăng (giảm) dòng điện iL trên điện cảm.
Chú ý rằng với các giá trị vs nhỏ, điện cảm không đủ năng lượng tích trữ để
tăng giá trị dòng điện, chỉnh vì lý do đó độ méo dạng sóng dòng điện như trên hình 3-
18a.
Hình 3-19 giới thiệu cấu trúc sơ đồ khối của hệ thống điều khiển chỉnh lưu tăng
áp, trong đó bao gồm cả khâu điều khiển vi-tích phân (PI) để điều khiển điện áp đầu ra
v0. Giá trị tham chiếu iLref dùng cho vòng điều khiển trong được lấy từ khâu nhân tín
hiệu giữa điện áp khâu điều khiển với giá trị tuyệt đối |vs(t)|. Bộ điều khiển trễ thực

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
hiện điều khiển nhanh dòng iL và kết quả thực tế thu đương dạng sóng dòng điện
nguồn xoay chiều gần tương tự như sóng sin.
Hình 3-19: Hệ thống điều khiển của chỉnh lưu tăng áp
Thông thường, điện áp đầu ra v0 phải lớn hơn biên độ điện áp nguồn vs(t) ít nhất
10%, để đảm bảo điều kiện để có thể điều khiển linh hoạt dòng điện. Khi đó quá trình
điều khiển diễn ra theo chiến thuật sau: tăng giá trị điện áp tham chiếu đầu ra v0.ref làm
tăng sai số (mức lệch) điện áp v0.ref – v0 và làm tăng tín hiệu điều khiển đầu ra khâu PI,
tín hiệu này là nguyên nhân làm tăng biên độ của dòng điện tham chiếu iL.ref. Bộ điều
khiển dòng sẽ bám theo giá trị tham chiếu mới cũng tăng biên độ của sóng sin dòng
điện đầu vào, tăng lượng công suất tác dụng được truyền qua bộ chỉnh lưu và cuối
cùng làm tăng điện áp đầu ra v0.
Hình 3-20: Dạng sóng dòng, áp xoay chiều đầu vào chỉnh lưu tăng áp: (a) không lọc điện áp v0;
(b) có lọc điện áp v0; phổ tần số; (c) không lọc; và (d) có lọc
Hình 3-20 là dạng sóng dòng điện và điên áp nguồn vs. Những gợn sóng của
dòng điện có thể được làm nhỏ đi bằng cách rút ngắn độ rộng khoảng trễ δ. Sự cải
thiện này đánh đổi bằng tăng tần số đóng mở, tỉ lệ thuận với tổn hao chuyển mạch của
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
transistor. Đối với một chiều rộng trễ nhất định, trị số điện cảm giảm kéo theo tăng tần
số đóng ngắt. Như ta thấy trên hình, dòng điện xoay chiều cho thành phần hài bậc 3.
Thành phần này do sóng hài bậc 2 có trong điện áp v0 được cấp ngược thông qua khâu
điều khiển (PI) và kết hợp với sóng sin do thành phần bậc 3 của dòng iL.ref. Những
sóng hài nhiễm vào thành phần cơ bản có thể loại bỏ bằng cách lọc điện áp v0, với bộ
lọc thông thấp hoặc bộ lọc chặn trên ở phạm vi 2ωs. Dòng điện xoay chiều đầu vào có
dạng sóng trên hình 3.20b khi thực hiện lọc. Hình 3.20d cho thấy sự kết quả giảm sóng
hài bậc 3.
Tuy nhiên, trong cả hai trường hợp, sự giảm mạnh ở các thành phần sóng hài
trong dòng điện xoay chiều, có thể thấy trong hình 3-20c và 3-20d. Dòng điện đáp ứng
những giới hạn được thiết lập tại tiêu chuẩn IEC 61000-3-2. Độ méo dạng tổng của
dòng điện trong hình 3-20a chỉ có THD = 7,46% và hình 3-20b là THD = 4,83%.
Trong cả hai trường hợp hệ số công suất đạt giá trị rất cao, vượt quá 0,99.
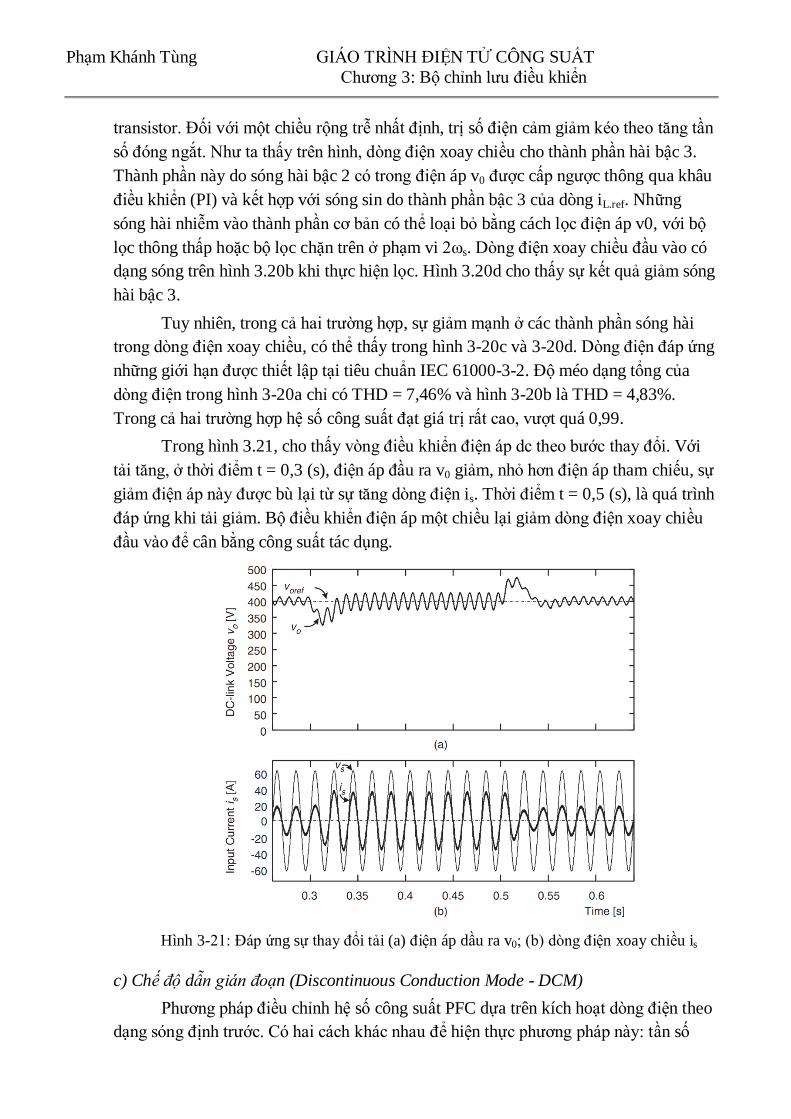
Trong hình 3.21, cho thấy vòng điều khiển điện áp dc theo bước thay đổi. Với
tải tăng, ở thời điểm t = 0,3 (s), điện áp đầu ra v0 giảm, nhỏ hơn điện áp tham chiếu, sự
giảm điện áp này được bù lại từ sự tăng dòng điện is. Thời điểm t = 0,5 (s), là quá trình
đáp ứng khi tải giảm. Bộ điều khiển điện áp một chiều lại giảm dòng điện xoay chiều
đầu vào để cân bằng công suất tác dụng.
Hình 3-21: Đáp ứng sự thay đổi tải (a) điện áp dầu ra v0; (b) dòng điện xoay chiều is
c) Chế độ dẫn gián đoạn (Discontinuous Conduction Mode - DCM)
Phương pháp điều chỉnh hệ số công suất PFC dựa trên kích hoạt dòng điện theo
dạng sóng định trước. Có hai cách khác nhau để hiện thực phương pháp này: tần số

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
chuyển mạch cố định và tần số chuyển mạch thay đổi. Cả hai cách thức này được thể
hiện trong hình 3-22.
DCM với tần số chuyển mạch cố định
Dạng sóng dòng điện tập hợp từ ba chế độ trong khoảng thời gian một chu kỳ
chuyển mạch Ts . Giai đoạn đầu mỗi chu kỳ (mode 1) BJT được bật dẫn điện, trong
giai đoạn dẫn (hình 3-23a) nguồn được nối tắt khép mạch qua diode chỉnh lưu, điện
cảm L và chuyển mạch boost T. Khi đó dòng điện iL tăng theo tỉ lệ với điện áp tức thời
của nguồn. Như vậy, trong giai đoạn bật, giá trị trung bình của dòng điện tỉ lệ với điện
áp nguồn vs, chính là điều cần thiết để điều chỉnh hệ số công suất.
Khi chuyển mạch được tắt (mode 2), dòng điện chảy đến tải thông qua diode D,
như trong hình 3-23b. Dòng điện tức thời có trị số giảm (cho đến lúc điện áp v0 lớn
hơn biên độ điện áp nguồn) theo tỉ lệ với hiệu sô điện áp nguồn và điện áp tải. Giai
đoạn cuối (mode 3) như trong hình 3-23c, tương ứng với thời gian dòng điện đạt giá trị
0, kết thúc quá trình chuyển mạch Ts.
Hình 3-22: Chế độ dẫn gián đoạn (a) với tần số chuyển mạch cố định; (b) với tần số chuyển
mạch thay đổi.
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
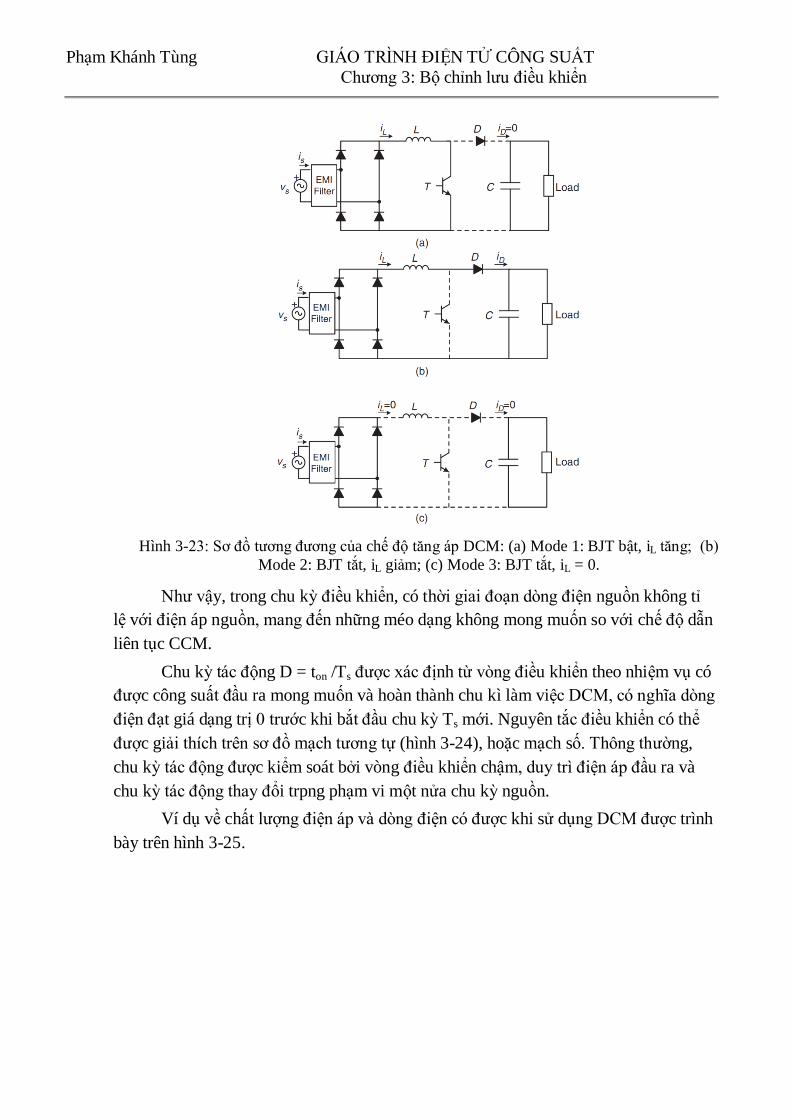
Hình 3-23: Sơ đồ tương đương của chế độ tăng áp DCM: (a) Mode 1: BJT bật, iL tăng; (b)
Mode 2: BJT tắt, iL giảm; (c) Mode 3: BJT tắt, iL = 0.
Như vậy, trong chu kỳ điều khiển, có thời giai đoạn dòng điện nguồn không tỉ
lệ với điện áp nguồn, mang đến những méo dạng không mong muốn so với chế độ dẫn
liên tục CCM.
Chu kỳ tác động D = ton /Ts được xác định từ vòng điều khiển theo nhiệm vụ có
được công suất đầu ra mong muốn và hoàn thành chu kì làm việc DCM, có nghĩa dòng
điện đạt giá dạng trị 0 trước khi bắt đầu chu kỳ Ts mới. Nguyên tắc điều khiển có thể
được giải thích trên sơ đồ mạch tương tự (hình 3-24), hoặc mạch số. Thông thường,
chu kỳ tác động được kiểm soát bởi vòng điều khiển chậm, duy trì điện áp đầu ra và
chu kỳ tác động thay đổi trpng phạm vi một nửa chu kỳ nguồn.
Ví dụ về chất lượng điện áp và dòng điện có được khi sử dụng DCM được trình
bày trên hình 3-25.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-24: Tăng áp DCM với tần số chuyển mạch cố định
Hình 3-25: Dạng sóng của Tăng áp DCM: điện áp nguồn vs, xung điều khiển BJT, dòng điện
nguồn is
DCM với tần số chuyển mạch thay đổi
Nguyên lý làm việc giống như đối với loại tần số cố định, sự khác biệt chính ở
đây là không có chế độ (mode 3) do BJT được bật ngay sau khi dòng điện đạt giá trị 0.
Phương pháp này giảm độ méo dạng dòng điện nhưng đổi lại phải thực hiện tần số
chuyển mạch thay đổi (Ts thay đổi) và do đó giảm đặc tính cải thiện sóng hài.
Cả hai phương pháp CCM và DCM đều có được sự cải thiện hệ số công suất.
Phương pháp DCM có hiệu quả hơn khi loại bỏ được các tổn hao khi diode phục hồi
tích chất ngược, tuy nhiên phương pháp này có độ gợn sóng cao, độ méo dạng đáng kể
và thông thường hoàn thành được yêu cầu loại bỏ sóng hài bậc 5. Do đó, chỉnh lưu
tăng áp DCM ở giới hạn ở công suất đến 300W đáp ứng tiêu chuẩn và qui định.
Phương pháp DCM với tần số thay đổi giảm hiệu quả về tiêu chuẩn sóng hài, do dòng
điện được phân bổ trong phổ rộng.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
d. Cấu trúc cộng hưởng cho chỉnh lưu tăng áp
Một chỉ số quan trong trong điện tử công suất – các tổn hao trong các linh kiện
bán dẫn công suất. Các tổn hao này chia làm hai nhóm chính: tổn hao bán dẫn
(conductin losses) và tổn hao chuyển mạch (switching losses), như trong hình 3-26.
Tổn hao bán dẫn do dòng điện đi qua mặt tiếp giáp, và như vậy tổn hao này
không tránh khỏi. Còn tổn hao chuyển mạch, xuất hiện trong thời điểm thay đổi trạng
thái dẫn điện của các linh kiện, có thể giảm xuống hoặc thậm chí loại bỏ được nếu như
chuyển mạch được thực hiện khi: (a) dòng điện đi qua linh kiện bán dẫn bằng không;
(b) điện áp giữa hai điểm của linh kiện bán dẫn bằng không. Chế độ chuyển mạch trên
được gọi là cộng hưởng.
Hình 3-26: Tổn hao bán dẫn và tổn hao chuyển mạch ở linh kiện chuyển mạch công suất
Chuyển mạch cộng hưởng còn được sử dụng trong chỉnh lưu tăng áp. Để đáp
ứng yêu cầu này, sơ đồ chỉnh lưu tăng áp trong hình 3-17 có một số thay đổi, bằng
cách bổ xung phần tử phản kháng và linh kiện bán dẫn.
Trong hình 3.27 cấu trúc cộng hưởng với dòng điện chuyển mạch bằng không
(zero current switching - ZCS). Như ta thấy, sơ đồ được bổ xung thêm các phần tử:
cuộn cảm (Lr1, Lr2), tụ điện (Cr ), diodes (Dr1, Dr2), và van chuyển mạch (Sr).
Tương tự, trong hình 3-28 cấu trúc công hưởng chuyển mạch với điện áp
chuyển mạch bằng không (zero voltage switching - ZVS). Có bổ xung các phần tử
cuộn cảm (Lr ), tụ điện (Cr ), và van chuyển mạch công suất (Sr ), lưu ý: diode D được
thay bằng hai “diode cộng hưởng” Dr1 và Dr2.
Trong cả hai cấu trúc ZVS hoặc ZCS, điều kiện công hưởng đạt được thông qua
điều khiển van chuyển mạch công suất Sr.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-27: Chỉnh lưu Tăng áp với ZCS
Hình 3-28: Chỉnh lưu Tăng áp với ZVS
e. Chỉnh lưu không cầu tăng áp
Chỉnh lưu tăng áp không cầu được trình bày tại hình 3-29, trong đó cầu diode
được thay thế bằng hai chỉnh lưu tăng áp làm việc tuần tự: (a) khi vs dương, T1 và D1
làm việc như chỉnh lưu tăng áp (hình 3-29b); khi vs âm, T2 và D2 làm việc như chỉnh
lưu tăng áp 2 (hình 3-29c). Cấu trúc này giảm tổn thất chuyển mạch, tuy nhiên đòi hỏi
mạch điều khiển phức tạp hơn.
Hình 3-29: (a) Chỉnh lưu tăng áp không cầu; sơ đồ tương đương khi (b) điện áp vs >0 ; và (c)
điện áp vs < 0

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
3.1.2.4. Chỉnh lưu nhân đôi điện áp PWM
Hình 3-30 so đồ nguyên lý mạch chỉnh lưu nhân đôi điện áp bằng điều chỉnh độ
rộng xung (PWM), sử dụng 2 transistors T1 and T2 và 2 tụ lọc C1 and C2. Các
transistor được điều khiển bật tắt để điều khiển dạng sóng dòng điện nguồn theo điện
áp đầu ra v0. Điện áp rơi trên các tụ điện VC1 and VC2 cần phải cao hơn biên độ điện áp
nguồn vs để thực hiện được các thao tác điều khiển dòng điện nguồn.
Sơ đồ mạch tương đương của bộ chỉnh lưu khi transistor T1 bật, thể hiện trong
hình 3-30b. Khi đó điện áp trên cuộn cảm theo biểu thức:
0v)t(vdt
diLv 1Cs
sL (3-28)
Biểu thức 3-28 có nghĩa trong trạng thái dẫn này, giá trị dòng điện is(t) giảm.
Hình 3-30: Chỉnh lưu nhân đôi điện áp: (a) sơ đồ mạch; (b) sơ đồ tương đương khi T1 bật; (c) sơ
đồ tương đương khi T2 bật
Mặt khác, sơ đồ mạch tương đương khi transistor bật thể hiện trong hình3-30c,
với biểu thức điện áp trên cuộn cảm:
0v)t(vdt
diLv 2Cs
sL (3-29)
Rõ ràng, lúc này giá trị dòng điện is(t) tăng.
Từ đó ta thấy, dạng sóng của dòng điện xoay chiều có thể ddieeeuf khiển được
thông qua bật tắt luân phiên các transistor T1 và T2 giống như quá trình được thể hiện
trong hình 3-18a cho bộ biến đổi chỉnh lưu một pha tăng áp. Hình 3-31 thể hiện sơ đồ
khối của hệ thống chỉnh lưu nhân đôi điện áp, nó rất giống với sơ đồ khối của chiinhr
lưu tăng áp. Dạng mạch này có thể gây nên sự mất cân bằng giữa điện áp trên các tụ
điện VC1 và VC2, ảnh hưởng đến chất lượng điều khiển. Vấn đề này được giải quyết
bằng cách bổ xung thêm một phần tử cấp tìn hiệu điều khiển tỉ lệ với độ lệch điện áp

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
trên các tụ. Hình 3-32 thể hiện dạng sóng dòng điện nguồn, biên độ gợn sóng của dòng
này có thể giảm được bằng điều chỉnh bằng đọ rộng thời gian trễ.
Hình 3-31: Hệ thống điều khiển chỉnh lưu nhân đôi điện áp
Hình 3-32: Dạng sóng dòng điện trong chỉnh lưu nhân đôi điện áp
3.1.2.5. Chỉnh lưu cầu PWM
Hình 3-33a vẽ sơ đồ mạch lực của chỉnh lưu điều khiển PWM kết nối theo
mạch cầu, trong đó dùng 4 transistor và diode chống dòng ngược mắc song song để
điều khiển điện áp một chiều v0. Với cách chuyển mạch PWM lưỡng cực, bộ biến đổi
có hai chế độ dẫn: (i) Transistor T1 và T4 bật, T2 và T3 tắt; (ii) Transistor T2 và T3 bật,
T1 và T4 tắt. Trong cấu trúc này, điện áp đầu ra v0 phải lớn hơn biên độ điện áp xoay
chiều nguồn vs, đảm bảo điều kiện thích hợp điều khiển dòng điện xoay chiều.
Hình 3-33b, mạch điện tương đương khi T1 và T4 bật, khi đó điện áp trên cuộn
cảm được xác định:
0v)t(vdt
diLv 0s
sL (3-30)
Và dòng điện trên điện cảm is biến đổi giảm.
Hình 3-33c, mạch điện tương đương khi T2 và T3 bật, khi đó điện áp trên điện
ccarm tihnhs theo biểu thức:
0v)t(vdt
diLv 0s
sL (3-31)
Điều này có nghĩa dòng điện is có giá trị tăng.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-33: Chỉnh lưu một pha PWM kết nối cầu: (a) sơ đồ mạch; (b) sơ đồ tương đương khi T1
và T4 bật; (c) sơ đồ tương đương khi T2 và T3 bật; (d) sơ đồ tương đương khi T1 và T3 hoặc T2 và T4 bật; và (e) dạng sóng dòng điện xoay chiều nguồn
Trường hợp cuối cùng, ở hình 3-33d, sơ đồ tương dương khi T1 và T3 hoặc T2
và T4 bật. Lúc đó, điện áp nguồn khép mạch qua cuộn cảm L, và điện áp được tính
theo:
0V)t(vdt
diLv 0s
sL (3-32)
Biểu thức này cho thấy giá trị dòng điện phụ thuộc vào dấu của điện áp vs.
Dạng sóng dòng điện nguồn có thể điều chỉnh bằng cách chuyển mạch thích
hợp giữa T1–T4 hoặc T2–T3, tương tự như ở hình 3-18a cho trường hợp chỉnh lưu một
pha tăng áp. Phương pháp điều khiển giống như trường hợp trong hình 3-31, cho dạng
sơ đồ nhân đôi điện áp. Chất lượng dòng điện xoay chiều nguồn như trong hình 3-32.
Dạng sóng dòng điện xoay chiều được cải thiện đáng kể nếu có sử dụng thêm
chế độ hình 3-33d, với ưu điểm thay thế điều khiển độ trễ dòng điện với điều khiển
tuyến tính và điều khiển PWM ba cấp. Phương pháp này giảm tần số chuyển mạch và
có phổ dòng điện rõ ràng hơn.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Cuối cùng, có thể thấy rằng các đặc tính nổi bật của bộ biến đổi PWM điều
khiển kết nối cầu và nhân đôi điện áp là khả năng tái sinh của chúng. Những bộ chỉnh
lưu loại này có thể cấp công suất cho tải từ nguồn xoay chiều một pha, độ méo dạng
rất thấp và hệ số công suất rất cao PF > 0,99. Hình 3-33e cho thấy, trong quá trình làm
việc, dòng điện xoay chiều nguồn lệch pha 180o so với điện áp, có nghĩa PF ≈ -1 (PF
gần đạt tới giá trị 1, do các thành phần hài rất nhỏ trong dòng điện xoay chiều nguồn).
3.1.2.6. Ứng dụng của điều chỉnh hệ số công suất chỉnh lưu
a. Các ứng dụng chỉnh lưu tăng áp.
Chỉnh lưu một pha tăng áp trở nên thông dụng trong số các thiết bị cấp nguồn
có chức năng điều chỉnh hệ số công suất (PFC). Để giảm giá thành, in general purpose
power supplies. To reduce the costs, áp dụng hệ thống điều khiển như trong hình 3-19
và các transistor công suất điều khiển cực đươc kết nối với mạch tích hợp (IC), như
UC3854 hoặc MC33262. Sơ đồ trong hình 3-34.
Hình 3-34: Sơ đồ khối đơn giản (a) bộ điều chỉnh hệ số công suất dùng IC và (b) chấn lưu điện
tử có điều chỉnh hệ số công suất
Ngày nay các bộ chấn lưu đèn huỳnh quang dùng công nghệ tần số cao dần thay
thế các chấn lưu cuộn cảm. Các chấn lưu điện tử cần có bộ biến đổi ac/dc. Để đáp ứng

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
yêu cầu giảm sóng hài, đạt chất lượng cao về hiệu suất cvà hệác bộ chỉnh lưu hệ số
công suất cáo được sử dụng như trong hình 3-35.
b. Chỉnh lưu PWM nhân đôi điện áp
Phát triển các bộ điều khiển động cơ hiện đang là chủ đề có nhiều quan tâm,
đặc biệt trong phạm vi công suất nhỏ. Hình 3-35 trình bày cấu trúc bộ biến đổi dành
cho các động cơ công suất thấp. Cấu trúc bao gồm: động cơ ba pha công suất nhỏ,
được cấp điện bằng nguồn điện xoay chiều một pha. Các transistors T1, T2 và tụ điện
C1, C2 tạo ra điện áp nhân đôi của chỉnh lưu một pha, được điều khiển thông qua điện
áp hồi tiếp và tạo ra dạng sóng sin cho dòng điện xoay chiều nguồn, có hệ số công suất
gần bằng một. Ben cạnh đó các transistor T3,T4,T5, T6 và các tụ điện C1 and C2 tạo ra
nguồn điện không đối xứng cấp cho động cơ. Một đặc điểm của mạch động lực trong
hình 3-35, tụ điện tái tạo năng lượng cho nguồn xoay chiều một pha.
Hình 3-35: Bộ điều khiển động cơ giá rẻ
3.2. Chỉnh lưu ba pha điều khiển
Chỉnh lưu ba pha có điều khiển được áp dung rộng rãi từ các thiết bị chỉnh lưu
công suất nhỏ cho đến thiết bị truyền tải dòng một chiều điện áp cao (HVDC). Thiết bị
chỉnh lưu ba pha còn được dùng trong các quá trình điện hóa, điều khiển động cơ, điều
khiển nguồn điện và rất nhiều các ứng dụng khác. Dựa trên quá trình chuyển mạch, có
thể phân chia thành 2 loại như sau: chỉnh lưu điều khiển chuyển mạch (chỉnh lưu
thyristor) và chỉnh lưu điều chỉnh độ rộng xung (pulse width modulated - PWM).

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
3.2.1. Chỉnh lưu điều khiển chuyển mạch tuần tự
3.2.1.1. Chỉnh lưu ba pha nửa sóng
Nguyên lý sơ đồ chỉnh lưu tia ba pha nửa sóng trình bày trên hình 3-36a. Điều
chỉnh điện áp chỉnh lưu, sơ đồ dùng 3 thyristor mắc chung Kathode. Điện áp nguồn
xoay chiều được coi là lý tưởng.
Thyristor sẽ dẫn (trạng thái bật) khi điện áp Anode – Kathode vAK dương và
đồng thời có xung kích mở iG vào cực điều khiển. Góc trễ xung điều khiển α được tính
từ điểm giao của các điện áp pha nguồn là khi điện áp vAK bắt đầu dương.
Hình 3-36: Chỉnh lưu ba pha nửa sóng có điều khiển (a) sơ đồ mạch; (b) giá trị tức thời vd và giá
trị trung bình Vd khi góc kích mở α
Hình 3-37: Phạm vi góc điều khiển kích mở
Hình 3-37 cho thấy, góc điều khiển kích mở có thể tay đổi trong khoảng từ 0o
đến 180o, tuy nhiên do quá trình chuyển mạch mà góc mở tối đa chỉ ở khoảng 160
o.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-38: Dạng sóng dòng điện chỉnh lưu
Như thấy trên hình 3-38, khi tải điện trở, dạng sóng dòng điện và điện áp chỉnh
lưu là như nhau. Khi tăng giá trị điện cảm của tải, dòng điện trở lên bằng phẳng hơn và
cuối cùng trở nên phẳng hoàn toàn. Các thyristor trong chế độ không dẫn (tắt) khi
thyristor tiếp theo được chuyển sang trạng thái bật hoặc dòng điện bắt đầu đổi chiều.
Điện áp trung bình trên tải có thể tính theo biểu thức:
3
3
mD )t(d)tcos(
3
2
VV
cosV17,1cos
3/
)3/sin(VV mD (3-33)
Trong đó: Vm – điện áp pha thứ cấp (nguồn xoay chiều), V – trị hiệu dụng của
điện áp pha, ω – tần số góc của nguồn xoay chiều.
Từ biểu thức 3-33 có thể thấy rằng, điện áp trung bình trên tải VD có thể được
điều chỉnh bằng cách thay đổi góc kích mở α. Khi α < 90o, VD có giá trị dương và khi
α > 90o, VD có giá trị âm. Trong trường hợp đó, mạch chỉnh lưu làm việc ở chế độ
nghịch lưu và tải cần phải có phần tử có thể tạo ra năng lượng đảo chiều bằng cách đảo
chiều điện áp một chiều trên tải.
Dạng dòng điện xoay chiều của chỉnh lưu nửa sóng được thể hiện trên hình 2-
27. Hình vẽ dạng sóng này với giả định dòng điện một chiều không đổi (điện cảm LD
vô cùng lớn). Mặc dù có sự chuyển mạch liên tiếp, mỗi van công suất dẫn điện trong
khoảng 120o trong chu kỳ. Dòng điện cuộn thứ cấp (và dòng điện thyristor) là dòng
một chiều, chính là điều không mong muốn, làm cho sơ đồ chỉnh lưu tia ba pha nửa
sóng không được áp dụng trong các thiết bị công suất lớn.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Dòng điện cuộn sơ cấp có dạng sóng tương tự thứ cấp. Sự biến dạng lớn của
dạng sóng dòng điện sơ cấp cần phải được lọc để giảm sự ảnh hưởng của các thành
phần hài. Dạng sóng trình bày trên hình 3-39 là thông tin hữu ích khi thiết kế máy biến
áp.
Hình 3-39: Dạng sóng dòng điện nguồn xoay chiều (sơ cấp iA, iB, iC và thứ cấp ia, ib, ic)
Từ các biểu thức:
DDD
tctctc
scscsc
I.VP
I.V.3S
I.V.3S
(3-34)
Trong đó: Ssc và Stc – công suất toàn phần cuộn sơ cấp và thứ cấp. PD – công
suất được chuyển sang phía một chiều. Công suất chuyển sang một chiều lớn nhất khi
góc kích mở α = 0o (hoặc α = 180
o). Từ đó thiết lập được quan hệ giữa điện áp xoay
chiều và một chiều (α = 0o):
scD
tcD
V.a.17,1V
V17,1V
(3-35)
Trong đó: a – tỉ số vòng dây của cuộn thứ cấp đối với cuộn sơ cấp. where a is
the secondary to primary turn relation of the trans-former. Bên cạnh đó quan hệ giữa
dòng điện xoay chiều và một chiều cũng có thể thiết lập nhờ đồ thị dạng sóng hình 2-
27:

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
2
3I.aI
3
II
Dsc
Dtc
(3-36)
Từ đó công suất trên các cuộn sơ cấp và thứ cấp
Dsc
Dtc
P.21,1S
P.48,1S
(3-37)
Biểu thức 3-37 cho thấy công suất của máy biến áp phía sơ cấp phải tăng 21%
và phía thứ cấp phải tăng 48% so với công suất tải. Vì lý do này, máy biến áp phải
được thiết kế riêng biệt cho loại chỉnh lưu này. Đối với máy biến áp thông thường,
công suất máy phải vượt công suất tải 35%. Hệ số tăng công suất của cuộn thứ cấp lớn
hơn so với cuộn sơ cấp có nguyên nhân từ dòng điện một chiều trong nó. Bên cạnh đó,
hệ số tăng công suất máy biến áp còn do các thành phần hài bậc cao không tạo ra công
suất tác dụng. Sự bão hòa từ trong lõi thép và thành phần một chiều trong cuộn thứ cấp
làm cho lõi thép phải có kích thước lớn hơn.
3.2.1.2. Chỉnh lưu ba pha kép 6 – xung
Sơ đồ chỉnh lưu này được vẽ trong hình 3-40, cuộn thứ cấp có dạng hệ thống 6
pha và kết quả là chỉnh lưu tia 6 – xung (kết nối điểm giữa). Mặc dù có sự chuyển
mạch liên tiếp nhưng mỗi van công suất chỉ dẫn với thời gian 60o trong một chu kỳ.
Điện áp một chiều cao hơn trường hợp chỉnh lưu nửa sóng.
Hình 3-40: Chỉnh lưu 6 - xung
Điện áp trung bình trên tải có thể tính theo biểu thức:

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
6
6
mD )t(d)tcos(
3
VV
cosV35,1cos
6/
)6/sin(VV mD (3-38)
Điện áp một chiều cũng gợn sóng ít hơn so với trường hợp chỉnh lưu nửa sóng
do thành phần hài bậc 3 vốn có biên độ lớn. Giá trị điện cảm làm mịn dạng sóng LD
cũng nhỏ hơn trường hợp chỉnh lưu nửa sóng.
Hình 3-41: Chỉnh lưu 6 – xung: Dạng sóng dòng điện nguồn xoay chiều
Dòng điện xoay chiều nguồn của chỉnh lưu 6-pha có dạng sóng trên hình 3-41.
Dòng điện cuộn thứ cấp có dạng một chiều, tuy nhiên sự biến đổi chiều thiên từ thông
trong mạch từ máy biến áp được bù từ cấu trúc sao kép. Như ta đã nhận thấy, luôn chỉ
có một van công suất dẫn trong khi các van khác không thể song song cùng dẫn. Dòng
điện pha cuộn sơ cấp nối tam giác có dạng đối xứng dẫn trong khoảng 60o. Dòng điện
dây kết nối máy biến áp với nguồn, có dạng trong hình 2-30, cũng đối xứng nhưng dẫn
trong 120o.
Định mức tỷ lệ công suất toàn phần máy biến áp so với công suất chỉnh lưu
cũng thực hiện tương tự như với trường hợp chỉnh lưu nửa sóng:
Dsc
Dtc
P.28,1S
P.81,1S
(3-39)

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Như vậy máy biến áp có định mức công suất tăng 28% ở cuộn sơ cấp và 81% ở
cuộn thứ cấp. Tính trung bình công suất máy biến áp gấp 1,55 lần công suất chỉnh lưu
PD (55% vượt mức). Chu kỳ dẫn của các van ngắn, do đó máy biến áp đặc biệt không
cần thiết trong trường hợp này.
3.2.1.3. Chỉnh lưu sao kép với biến áp liên kết
Sơ đồ chỉnh lưu kiểu này tương tự hai mạch chỉnh lưu nửa sóng làm việc song
song, và rất hữu dụng khi có yêu cầu dòng điện một chiều chỉnh lưu có trị số lớn.
Phương pháp tối ưu đạt được sự cân bằng giữa các mục tiêu và loại bỏ các sóng hài
được thực hiện bằng pha liên kết như trong hình 3-32. Hai mạch nửa sóng lệch nhau
180o và hai điểm trung tính của các cuộn thứ cấp được kết nối thông qua máy biến áp
tự ngẫu có điểm giữa phân đôi dây quấn, được gọi là “interphase transformer.” Điểm
giữa dây quấn máy biến áp nối với một đầu của tải, và như vậy cả hai nhóm nửa sóng
làm việc song song. Mỗi nửa dòng điện một chiều ½ ID đi qua mỗi nửa dây quấn của
máy biến áp theo các chiều ngược nhau do đó lõi thép của máy biến áp không bị bão
hòa. Điện thế của hai điểm trung tính dao động độc lập với nhau và tạo ra điện áp có
dạng xung tam giác vT trong dây quấn máy biến áp như trong hình 3-43.
Hình 3-42: Chỉnh lưu sao kép với biến áp liên kết

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-43: Chỉnh lưu sao kép có pha liên kết
Do mạch chỉnh lưu này tương tự như hai mạch nửa sóng làm việc song song,
điện áp trung bình trên tải:
cosV17,1VD (3-40)
Trong đó: V – điện áp pha phía các van (cuộn thứ cấp).
Hình vẽ 2-32 cho thấy điện áp của các mạch nửa sóng so với các điểm trung
tính tương ứng. Điện áp vD1 là hiệu số điện thế giữa điểm cathode chung và điểm trung
tính N1. Điện áp vD2 là hiệu số giữa điện thế điểm cathode chung và điểm trung tính
N2. Ta có thể nhận thấy hai điện áp tức thời này lệch pha nhau và kết quả làm cho điện
áp vD bằng phẳng hơn so với các điện áp vD1 và vD2.
Hình 3-44 cho thấy sự biến đổi điện áp vD, vD1, vD2 và vT khi góc kích mở thay
đổi từ 0o đến 180
o.
Hình 3-44: Góc kích mở thay đổi từ 0o đến 180
o
Hệ số vượt công suất máy biến áp:
Dsc
Dtc
P.05,1S
P.48,1S
(3-41)
Giá trị bình quân hệ số vượt mức công suất là 1,26 giá trị này tốt hơn các sơ đồ
chỉnh lưu trước (1,35 đối với chỉnh lưu nửa sóng và 1,55 đối với chỉnh lưu 6-xung) và
tiết kiệm công suất máy biến áp.
Hình 3-45 thể hiện dạng sóng dòng điện xoay chiều nguồn đối với chỉnh lưu ba
pha kép với biến áp.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-45: Dạng sóng dòng điện xoay chiều nguồn
3.2.1.4. Chỉnh lưu ba pha cả sóng hoặc cầu Graetz
Kết nối song song các mạch chỉnh lưu thông qua biến áp tự ngẫu cho phép thực
hiện những chỉnh lưu với dòng điện lớn. Tuy nhiên khi mắc nối tiếp chúng tạo thành
“cầu van công suất” cũng cho phép thực hiện chỉnh lưu tương tự, như trình bày trên
hình 3-46 là bộ chỉnh lưu toàn sóng. Cách bố trí linh kiện trong mạch, tương đương
với 3 van công suất cathode chung tạo ra điện thế dương so với trung tính, còn 3 van
công suất anode chung tạo ra điện thế âm. Và kết quả điện áp một chiều lớn gấp 2 lần
so với trường hợp chỉnh lưu nửa sóng. Mỗi nửa cầu là một bộ biến đổi 3-xung. Kết nối
cầu thực chất là kết nối hai chiều và nó cho dòng điện luân phiên (đổi chiều) ở dây
quấn, phía van công suất, máy biến áp trong cả hai nửa sóng, loại bỏ dòng điện một
chiều trong dây quấn và bão hòa từ trong lõi thép. Những ưu điểm này làm cho cấu
trúc mạch cầu (còn gọi là Cầu Graetz) được ứng dụng nhiều nhất trong phân loại chỉnh
lưu có điều khiển bằng chuyển mạch. Cấu trúc của loại chỉnh lưu này không cần đến
biến áp đặc biệt và làm việc như bộ chỉnh lưu 6-xung.
Với tính chất nối tiếp của chỉnh lưu loại này, điện áp một chiều lớn gấp đôi
chỉnh lưu nửa sóng, và được tính theo công thức:
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
cos3/
)3/sin(V2)t(d)tcos(
3
V2V m
3
3
mD
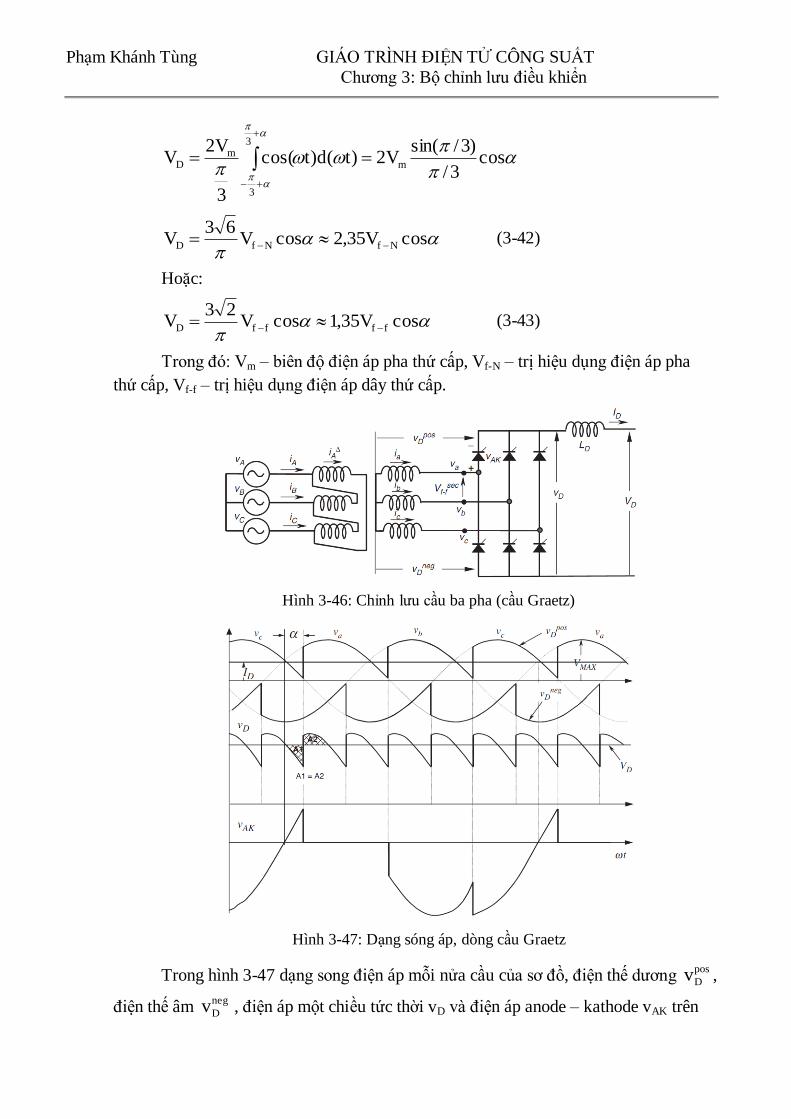
cosV35,2cosV63
V NfNfD (3-42)
Hoặc:
cosV35,1cosV23
V ffffD (3-43)
Trong đó: Vm – biên độ điện áp pha thứ cấp, Vf-N – trị hiệu dụng điện áp pha
thứ cấp, Vf-f – trị hiệu dụng điện áp dây thứ cấp.
Hình 3-46: Chỉnh lưu cầu ba pha (cầu Graetz)
Hình 3-47: Dạng sóng áp, dòng cầu Graetz
Trong hình 3-47 dạng song điện áp mỗi nửa cầu của sơ đồ, điện thế dương pos
Dv ,
điện thế âm neg
Dv , điện áp một chiều tức thời vD và điện áp anode – kathode vAK trên

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
một nhánh cầu. Điện áp lớn nhất của vAK là mV3 đúng bằng giá trị ở chỉnh lưu nửa
sóng và chỉnh lưu dùng biến áp liên kết. Chỉnh lưu sao kép có điện áp anode-kathode
lớn gấp đôi Vm. Hình 3-48 là dạng sóng dòng điện xoay chiều nguồn với giả thiết giá
trị điện cảm LD đủ lớn để dòng điện một chiều bằng phẳng.
Hình 3-48: Dạng sóng dòng điện cầu Graetz
Trường hợp này có cùng loại máy biến áp Δ/Y như trong hình 3-46. Ta có thể
nhận thấy dòng điện thứ cấp không có thành phần một chiều, do đó không cần phải
thiết kế dây quấn với hệ số tăng công suất nhằm tránh bão hòa từ. Dạng sóng trên được
vẽ với góc kích mở α khoảng 30o. Dạng sóng đối xứng ở cả cuộn sơ cấp và thứ cấp và
dòng điện dây chính là nguyên nhân cho sự phổ dụng của loại chỉnh lưu này. Hệ số
tăng công suất trong trường hợp này:
Dsc
Dtc
P.05,1S
P.05,1S
(3-44)
Như đã nhắc đến ở phần trên, máy biến áp chỉ cần thiết kế vượt công suất chỉnh
lưu 5% cho cả cuộn sơ cấp và thứ cấp. So sánh với hệ số 1,35 của chỉnh lưu nửa sóng
và 1,55 của chỉnh lưu 6-xung, 1,26 của chỉnh lưu dùng biến áp có điểm giữa, chỉnh lưu
cầu Graetz là giải pháp tốt cho sử dụng công suất máy biến áp.
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
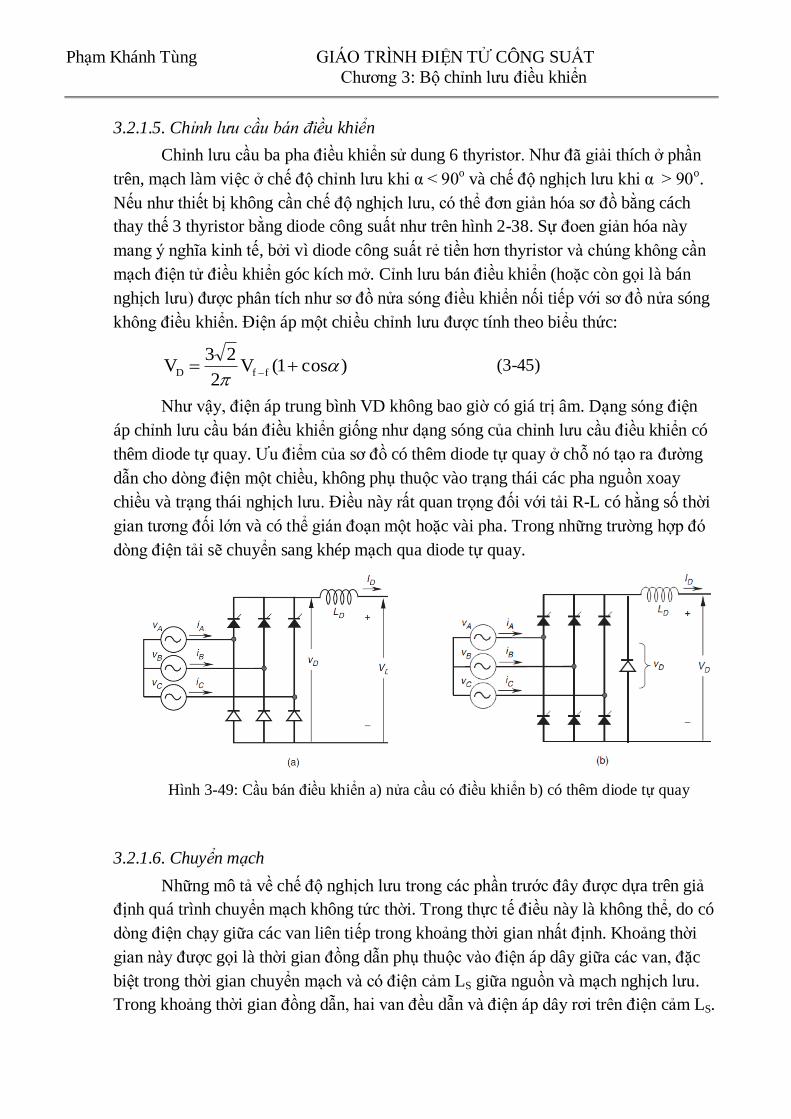
3.2.1.5. Chỉnh lưu cầu bán điều khiển
Chỉnh lưu cầu ba pha điều khiển sử dung 6 thyristor. Như đã giải thích ở phần
trên, mạch làm việc ở chế độ chỉnh lưu khi α < 90o và chế độ nghịch lưu khi α > 90
o.
Nếu như thiết bị không cần chế độ nghịch lưu, có thể đơn giản hóa sơ đồ bằng cách
thay thế 3 thyristor bằng diode công suất như trên hình 2-38. Sự đoen giản hóa này
mang ý nghĩa kinh tế, bởi vì diode công suất rẻ tiền hơn thyristor và chúng không cần
mạch điện tử điều khiển góc kích mở. Cỉnh lưu bán điều khiển (hoặc còn gọi là bán
nghịch lưu) được phân tích như sơ đồ nửa sóng điều khiển nối tiếp với sơ đồ nửa sóng
không điều khiển. Điện áp một chiều chỉnh lưu được tính theo biểu thức:
)cos1(V2
23V ffD
(3-45)
Như vậy, điện áp trung bình VD không bao giờ có giá trị âm. Dạng sóng điện
áp chỉnh lưu cầu bán điều khiển giống như dạng sóng của chỉnh lưu cầu điều khiển có
thêm diode tự quay. Ưu điểm của sơ đồ có thêm diode tự quay ở chỗ nó tạo ra đường
dẫn cho dòng điện một chiều, không phụ thuộc vào trạng thái các pha nguồn xoay
chiều và trạng thái nghịch lưu. Điều này rất quan trọng đối với tải R-L có hằng số thời
gian tương đối lớn và có thể gián đoạn một hoặc vài pha. Trong những trường hợp đó
dòng điện tải sẽ chuyển sang khép mạch qua diode tự quay.
Hình 3-49: Cầu bán điều khiển a) nửa cầu có điều khiển b) có thêm diode tự quay
3.2.1.6. Chuyển mạch
Những mô tả về chế độ nghịch lưu trong các phần trước đây được dựa trên giả
định quá trình chuyển mạch không tức thời. Trong thực tế điều này là không thể, do có
dòng điện chạy giữa các van liên tiếp trong khoảng thời gian nhất định. Khoảng thời
gian này được gọi là thời gian đồng dẫn phụ thuộc vào điện áp dây giữa các van, đặc
biệt trong thời gian chuyển mạch và có điện cảm LS giữa nguồn và mạch nghịch lưu.
Trong khoảng thời gian đồng dẫn, hai van đều dẫn và điện áp dây rơi trên điện cảm LS.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Giả thiết dòng điện một chiều ID được làm phẳng với điện cảm như trên hình 3-49, ta
có mối quan hệ sau:
BAffs
S vvtsinV2dt
diL2 (3-46)
Trong đó: isc – dòng điện trên van được mở trong thời gian chuyển mạch
(thyristor T2 trong hình 3-39). Dòng điện này có giá trị:
Ctcos
VL2
2i ff
S
sc
(3-47)
Giá trị hằng số “C” được tính thông qua điều kiện ban đầu tại thời điểm T2
được khởi động. Theo đơn vị góc thì ωt = α.
Khi ωt = α thì isc = 0
cosL..2
VC
S
ff (3-48)
Kết hợp 3-46 và 3-47
)tcos(cosL..2
Vi
S
ffsc
(3-49)
Hình 3-50: Quá trình chuyển mạch
Trước khi chuyển mạch, dòng điện ID được dẫn qua thyristor T1 (hình 3-50).
Trong lúc chuyển mạch, dòng điện tải giữ nguyên không đổi, isc quay ngược lại xuyên
qua T1 và T1 tự động tắt khi dòng isc đạt tới giá trị ID. Điều này xảy ra vì thyristor
không thể dẫn dòng theo chiều ngược. Cùng lúc, thời gian đồng dẫn kết thúc và dòng
ID được dẫn qua T2. Trong khoảng thời gian khi ωt = α + µ, isc = ID, trong đó μ được
định nghĩa là thời gian đồng dẫn. Thay thế biểu thức điều kiện cuối bằng biểu thức:
)cos(cosL..2
VI
S
ffD
(3-50)
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
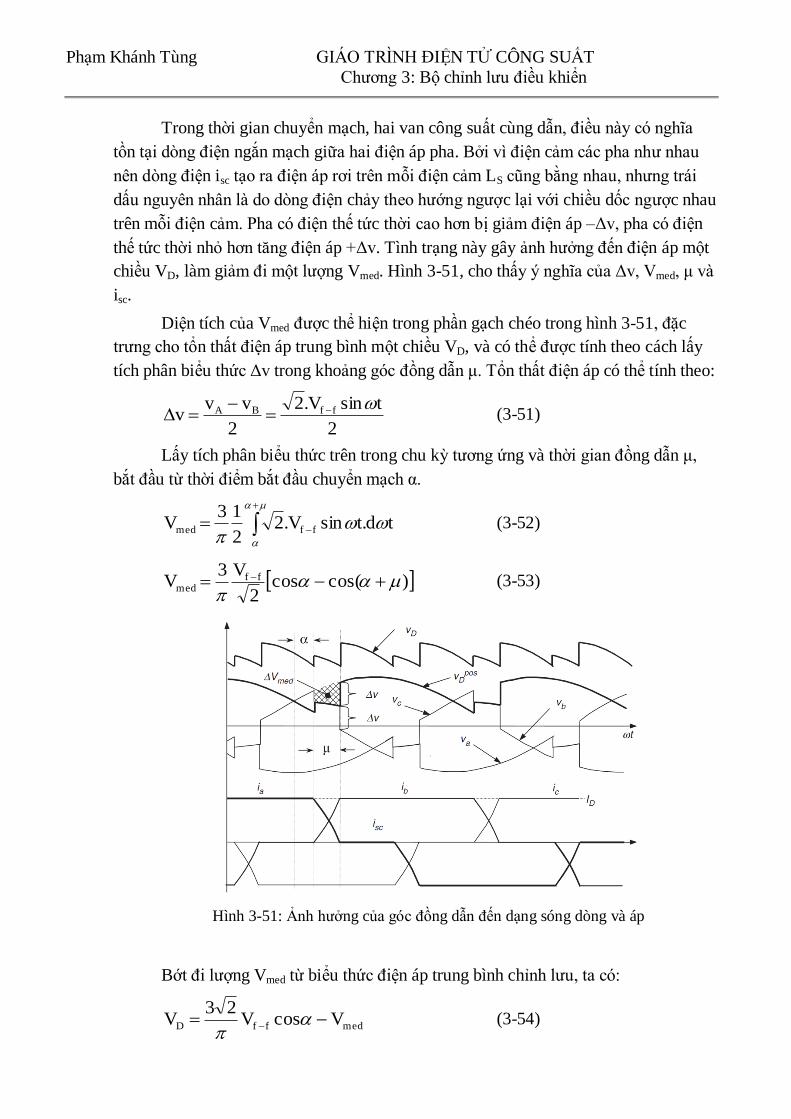
Trong thời gian chuyển mạch, hai van công suất cùng dẫn, điều này có nghĩa
tồn tại dòng điện ngắn mạch giữa hai điện áp pha. Bởi vì điện cảm các pha như nhau
nên dòng điện isc tạo ra điện áp rơi trên mỗi điện cảm LS cũng bằng nhau, nhưng trái
dấu nguyên nhân là do dòng điện chảy theo hướng ngược lại với chiều dốc ngược nhau
trên mỗi điện cảm. Pha có điện thế tức thời cao hơn bị giảm điện áp –Δv, pha có điện
thế tức thời nhỏ hơn tăng điện áp +Δv. Tình trạng này gây ảnh hưởng đến điện áp một
chiều VD, làm giảm đi một lượng Vmed. Hình 3-51, cho thấy ý nghĩa của Δv, Vmed, μ và
isc.
Diện tích của Vmed được thể hiện trong phần gạch chéo trong hình 3-51, đặc
trưng cho tổn thất điện áp trung bình một chiều VD, và có thể được tính theo cách lấy
tích phân biểu thức Δv trong khoảng góc đồng dẫn μ. Tổn thất điện áp có thể tính theo:
2
tsinV.2
2
vvv ffBA
(3-51)
Lấy tích phân biểu thức trên trong chu kỳ tương ứng và thời gian đồng dẫn μ,
bắt đầu từ thời điểm bắt đầu chuyển mạch α.
td.tsinV.22
13V ffmed
(3-52)
)cos(cos2
V3V ff
med
(3-53)
Hình 3-51: Ảnh hưởng của góc đồng dẫn đến dạng sóng dòng và áp
Bớt đi lượng Vmed từ biểu thức điện áp trung bình chỉnh lưu, ta có:
medffD VcosV23
V
(3-54)

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
)cos(cosV2
23V ffD
(3-55)
Hoặc
2cos
2cosV
2
23V ffD
(3-56)
Các biểu thức giá trị trung bình dòng và áp chỉnh lưu có thể viết theo điện áp sơ
cấp nếu có mặt máy biến áp nguồn.
)cos(cosL..2
V.aI
S
cs
ffD
(3-57)
)cos(cosV.a2
23V sc
ffD
(3-58)
Kết hợp các biểu thức dòng , áp chỉnh lưu làm một, ta có:
SD
sc
ffD LI3
cosV.a2
23V
(3-59)
Biểu thức 3-59 cho phép thiết lập sơ đồ tương đương đơn giản của chỉnh lưu
như trong hình 3-52a
(a)
(b)
Hình 3-52: Điện áp chỉnh lưu a) sơ đồ tương đương b) đặc tính điều chỉnh điện áp
Từ só đồ tương đương, xác định các đường biến thiên điện áp chỉnh lưu với các
góc kích mở khác nhau như trên hình 3-52b. Cần phải lưu ý rằng, các đường biến thiên
điện áp được vẽ với điều kiện lý tưởng, nhưng giúp hiểu rõ hơn về ảnh hưởng của Δv
lên điện áp chỉnh lưu. Ảnh hưởng của chuyển mạch và thời gian đồng dẫn đến điện áp
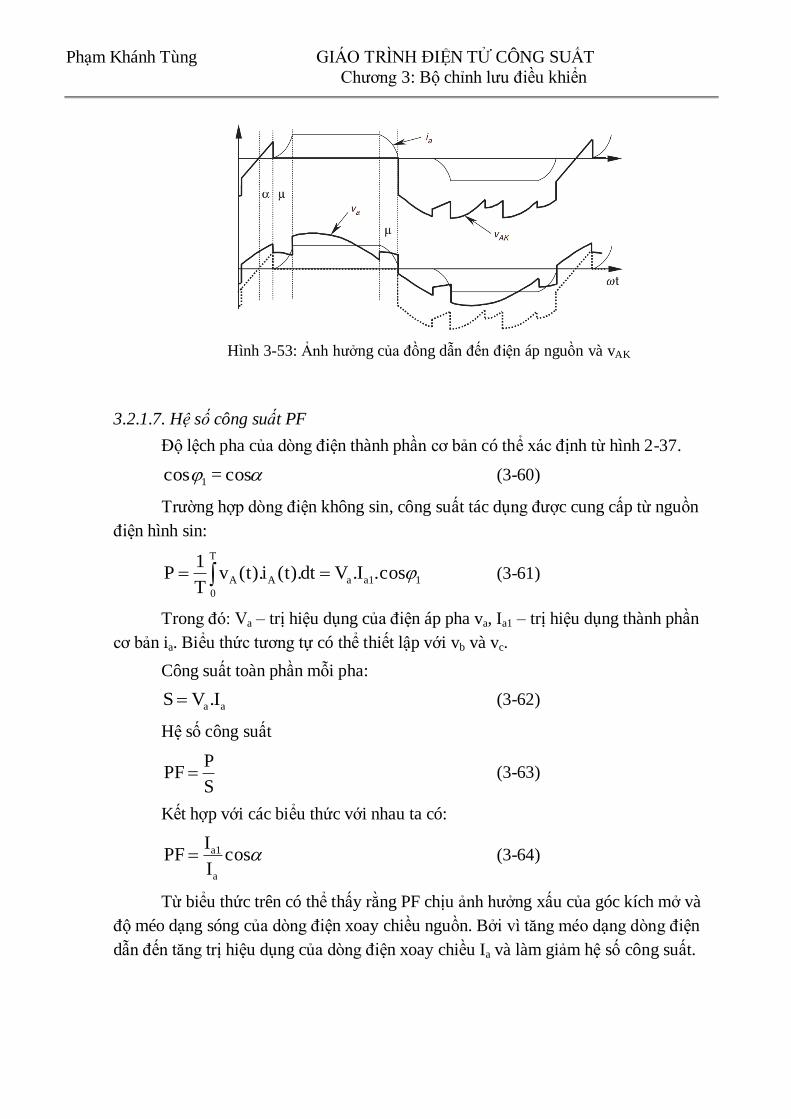
nguồn (va) và điện áp rơi trên thyristor vAK được thể hiện trên hình 3-53.
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-53: Ảnh hưởng của đồng dẫn đến điện áp nguồn và vAK
3.2.1.7. Hệ số công suất PF
Độ lệch pha của dòng điện thành phần cơ bản có thể xác định từ hình 2-37.
cos = cos 1 (3-60)
Trường hợp dòng điện không sin, công suất tác dụng được cung cấp từ nguồn
điện hình sin:
11aa
T
0
AA cos.I.Vdt).t(i).t(vT
1P (3-61)
Trong đó: Va – trị hiệu dụng của điện áp pha va, Ia1 – trị hiệu dụng thành phần
cơ bản ia. Biểu thức tương tự có thể thiết lập với vb và vc.
Công suất toàn phần mỗi pha:
aa I.VS (3-62)
Hệ số công suất
S
PPF (3-63)
Kết hợp với các biểu thức với nhau ta có:
cosI
IPF
a
1a (3-64)
Từ biểu thức trên có thể thấy rằng PF chịu ảnh hưởng xấu của góc kích mở và
độ méo dạng sóng của dòng điện xoay chiều nguồn. Bởi vì tăng méo dạng dòng điện
dẫn đến tăng trị hiệu dụng của dòng điện xoay chiều Ia và làm giảm hệ số công suất.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
3.2.1.8. Độ méo dạng
Dòng điện trong chỉnh lưu chuyển mạch có dạng khác sin khá nhiều. Ví dụ,
dòng điện xoay chiều trong sơ đồ cầu Graetz có những sóng hài bậc cao:
...)t11cos11
1t7cos
7
1t5cos
5
1t(cosI
32i DA
(3-65)
Một số đặc điểm của dòng điện bao gồm:
(i) không có thành phần hài bậc 3; (ii) các thành phần hài có mặt được xác định
từ 6k ± 1 với k số nguyên; (iii) thành phần hài bậc 6k + 1 có dấu dương; (iv) thành
phần hài bậc 6k − 1 có dấu âm; (v) trị hiệu dụng của thành phần cơ bản có giá trị:
/6II d1 và (vi) trị hiệu dụng của thành phần bậc n: n/II 1n
Nếu như dây quấn sơ cấp hoặc thứ cấp của máy biến áp chỉnh lưu nối tam giác,
dạng sóng điện áp xoay chiều (ac) bao gồm sự khác biệt tức thời giữa hai điện áp chữ
nhật thứ cấp lệch nhau 120o như trong hình dạng sóng dòng điện xoay chiều nguồn
chỉnh lưu cầu Graetz, hình 3-48e. Cuối cùng phân tích Fourier cho dòng điện xoay
chiều pha phía sơ cấp như sau:
...)t11cos11
1t7cos
7
1t5cos
5
1t(cosI
32i DA
(3-66)
Phân tích này khác với trường hợp nối dây quấn máy biến áp hình sao chỉ ở dấu
của thành phần bậc cao với các giá trị chẵn của k trong 6k ± 1, các bậc 5, 7, 17, 19…
3.2.1.9. Mạch đặc biệt giảm độ méo dạng
Nguyên tắc cơ bản để giảm sóng hài là kết nối thêm bộ lọc thụ động, có vai trò
như bộ phận hấp thụ sóng hài có tần số nhất định. Dạng tiêu biểu được trình bày trên
hình 2-43.
Ngoài ra, sóng hài cũng có thể được hạn chế bằng cách sử dụng các cấu trúc
chỉnh lưu đặc biệt, chẳng hạn cấu trúc chỉnh lưu 12-xung như trên hình 2.44. Dòng
điện xoay chiều lúc đó là tổng của hai dãy Fourier của dạng kết nối hình sao và tam
giác.
...)t23cos23
1t13cos
13
1t11cos
11
1t(cosI
322i DA
(3-
67)

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-54: Bộ lọc thụ động cho một pha
Hình 3-55: Chỉnh lưu 12-xung
Biểu thức lúc này chỉ chứa các sóng bậc 12k ± 1. Các thành phần bậc 6k ± 1
(với k chẵn): 5th, 7th, 17th, 19th … chỉ chạy giữa hai phần biến đổi của máy biến áp
mà không đi vào phần xoay chiều. Như vậy dòng điện xoay chiều trong chỉnh lưu 12-
xung có dạng như trong hình 3-56, gần hơn với dạng sin so với các trường hợp trước
đó. Với cách kết nối này, giá trị tức thời dòng điện một chiều cũng bằng phẳng hơn.
Hình 3-56: Dòng điện dây với chỉnh lưu 12-xung
Những bộ chỉnh lưu nhiều xung hơn cũng có nguyên tắc giảm méo tương tự.
Chỉnh lưu 12-xung có góc lệc 30o giữa các dây quấn thứ cấp. Ngoài ra tương tự như
vậy, bổ xung thêm máy biến áp mắc song song sẽ cho việc chỉnh lưu có số lượng xung

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
trong một chu kỳ lớn hơn. Chẳng hạn, chỉnh lưu 24-xung có cấu trúc 4 biến áp với góc
lệch pha 15o, còn chỉnh lưu 48 xung cần có 8 biến áp với góc lệch 7,5
o (biến áp kết nối
theo qui tắc zic zắc). Mặc dù về lý thuyết có thể nâng số xung, nhưng với số xung lớn
hơn 48 không cải thiện được dạng sóng nhiều so với mức độ phức tạp của sơ đồ.
Một cách kết hợp rất đơn giản nhưng có thể đạt được tần số xung như sơ đồ
trên hình 3-57. Cấu trúc này được gọi là “ripple reinjection”, bao gồm hai bộ chỉnh lưu
mắc song song và nối vởi tải thông qua cảm kháng nhiều bậc bằng nhau, mỗi bậc được
nối với van thyristor có điều khiển. Nếu điều khiển các van thyristor ở cảm kháng
đúng lúc, có thể đạt được tần số xung cao. Số xung nhịp ở mạch cảm kháng chính là
hệ số nhân với số xung nhịp của các mạch chỉnh lưu để đạt được số xung nhịp của cả
hệ thống. Ví dụ, ở hình 3-57, là hệ thống chỉnh lưu 48 xung, đạt được khi dựa trên tần
số xung gốc của bộ chỉnh lưu 12-xung và 4 thyristor ở mạch cảm kháng. Các cấu trúc
nhân xung nhịp này cần phải thực hiện thông qua các chỉnh lưu cầu nồi tiếp.
Hình 3-57: Chỉnh lưu 48-xung
Một giải pháp khác giảm sóng hài bậc cao là sử dụng bộ lọc công suất tích cực.
Bộ lọc này thực chất là một bộ biến đổi đặc biệt theo độ rộng xung (pulse width
modulated - PWM) như trên hình 3-58, có khả năng tạo ra sóng hài theo yêu cầu.
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-58: điều khiển dòng điện trong bộ lọc công suất tích cực
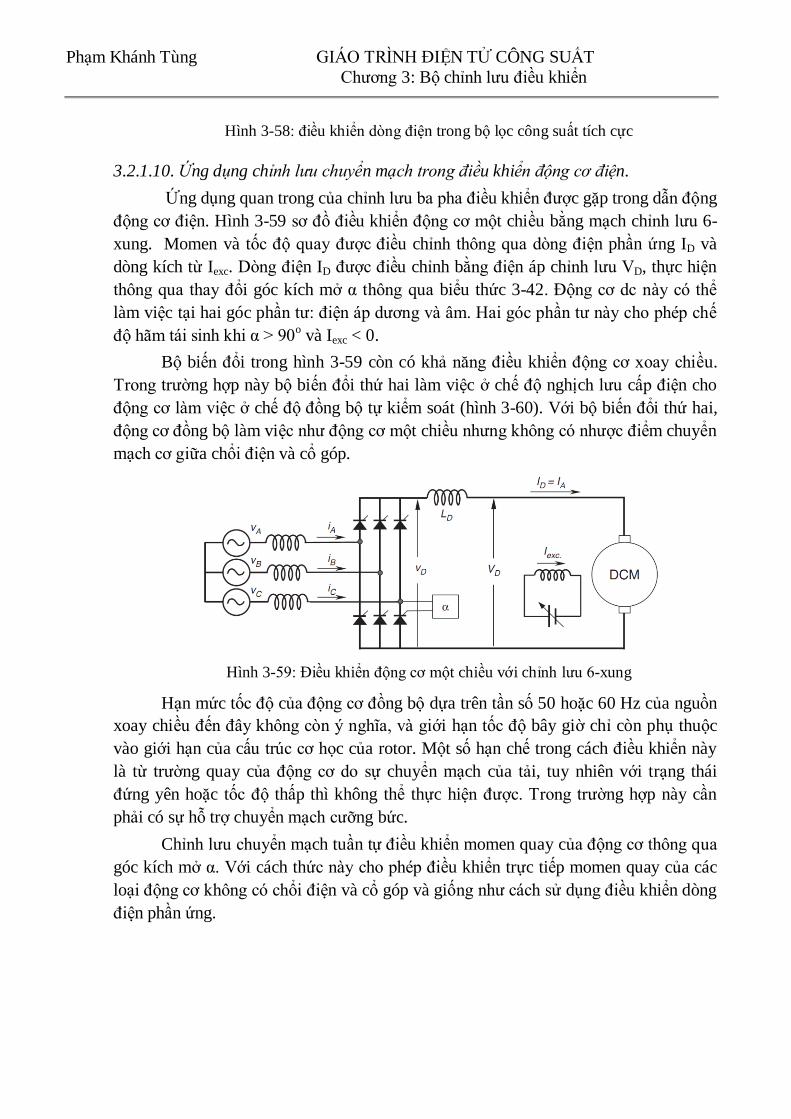
3.2.1.10. Ứng dụng chỉnh lưu chuyển mạch trong điều khiển động cơ điện.
Ứng dụng quan trong của chỉnh lưu ba pha điều khiển được gặp trong dẫn động
động cơ điện. Hình 3-59 sơ đồ điều khiển động cơ một chiều bằng mạch chỉnh lưu 6-
xung. Momen và tốc độ quay được điều chỉnh thông qua dòng điện phần ứng ID và
dòng kích từ Iexc. Dòng điện ID được điều chỉnh bằng điện áp chỉnh lưu VD, thực hiện
thông qua thay đổi góc kích mở α thông qua biểu thức 3-42. Động cơ dc này có thể
làm việc tại hai góc phần tư: điện áp dương và âm. Hai góc phần tư này cho phép chế
độ hãm tái sinh khi α > 90o và Iexc < 0.
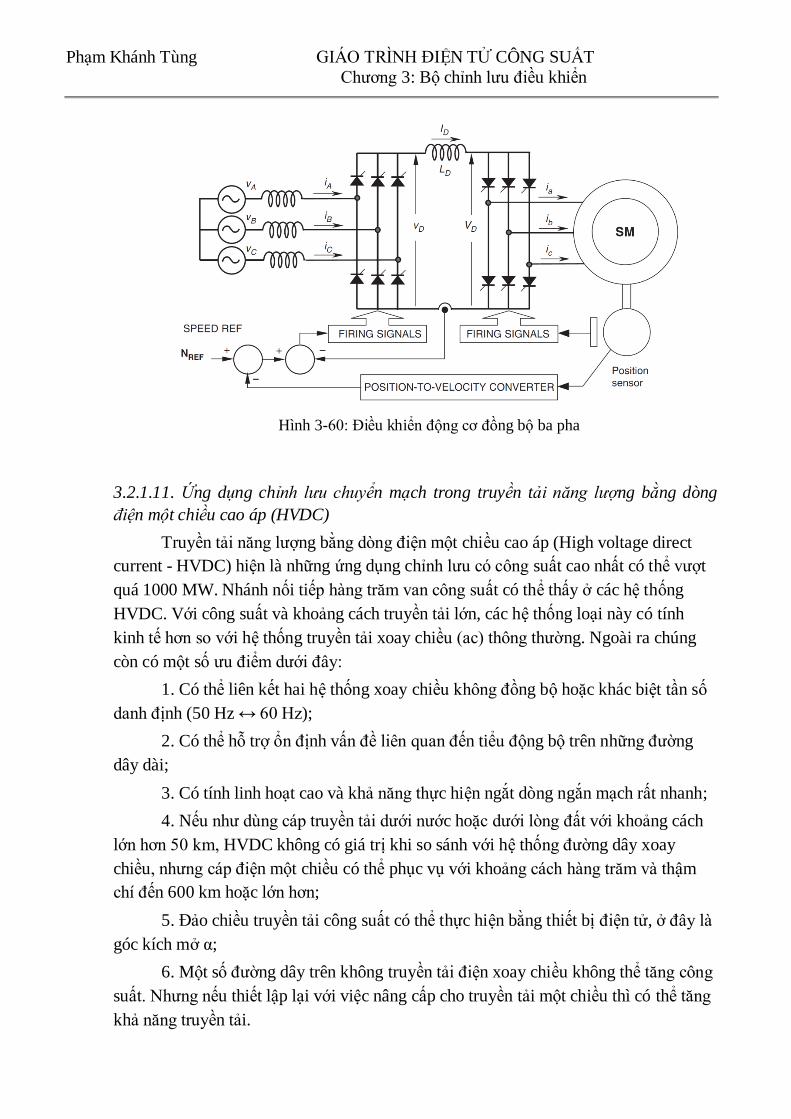
Bộ biến đổi trong hình 3-59 còn có khả năng điều khiển động cơ xoay chiều.
Trong trường hợp này bộ biến đổi thứ hai làm việc ở chế độ nghịch lưu cấp điện cho
động cơ làm việc ở chế độ đồng bộ tự kiểm soát (hình 3-60). Với bộ biến đổi thứ hai,
động cơ đồng bộ làm việc như động cơ một chiều nhưng không có nhược điểm chuyển
mạch cơ giữa chổi điện và cổ góp.
Hình 3-59: Điều khiển động cơ một chiều với chỉnh lưu 6-xung
Hạn mức tốc độ của động cơ đồng bộ dựa trên tần số 50 hoặc 60 Hz của nguồn
xoay chiều đến đây không còn ý nghĩa, và giới hạn tốc độ bây giờ chỉ còn phụ thuộc
vào giới hạn của cấu trúc cơ học của rotor. Một số hạn chế trong cách điều khiển này
là từ trường quay của động cơ do sự chuyển mạch của tải, tuy nhiên với trạng thái
đứng yên hoặc tốc độ thấp thì không thể thực hiện được. Trong trường hợp này cần
phải có sự hỗ trợ chuyển mạch cưỡng bức.
Chỉnh lưu chuyển mạch tuần tự điều khiển momen quay của động cơ thông qua
góc kích mở α. Với cách thức này cho phép điều khiển trực tiếp momen quay của các
loại động cơ không có chổi điện và cổ góp và giống như cách sử dụng điều khiển dòng
điện phần ứng.
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-60: Điều khiển động cơ đồng bộ ba pha
3.2.1.11. Ứng dụng chỉnh lưu chuyển mạch trong truyền tải năng lượng bằng dòng
điện một chiều cao áp (HVDC)
Truyền tải năng lượng bằng dòng điện một chiều cao áp (High voltage direct
current - HVDC) hiện là những ứng dụng chỉnh lưu có công suất cao nhất có thể vượt
quá 1000 MW. Nhánh nối tiếp hàng trăm van công suất có thể thấy ở các hệ thống
HVDC. Với công suất và khoảng cách truyền tải lớn, các hệ thống loại này có tính
kinh tế hơn so với hệ thống truyền tải xoay chiều (ac) thông thường. Ngoài ra chúng
còn có một số ưu điểm dưới đây:
1. Có thể liên kết hai hệ thống xoay chiều không đồng bộ hoặc khác biệt tần số
danh định (50 Hz ↔ 60 Hz);
2. Có thể hỗ trợ ổn định vấn đề liên quan đến tiểu động bộ trên những đường
dây dài;
3. Có tính linh hoạt cao và khả năng thực hiện ngắt dòng ngắn mạch rất nhanh;
4. Nếu như dùng cáp truyền tải dưới nước hoặc dưới lòng đất với khoảng cách
lớn hơn 50 km, HVDC không có giá trị khi so sánh với hệ thống đường dây xoay
chiều, nhưng cáp điện một chiều có thể phục vụ với khoảng cách hàng trăm và thậm
chí đến 600 km hoặc lớn hơn;
5. Đảo chiều truyền tải công suất có thể thực hiện bằng thiết bị điện tử, ở đây là
góc kích mở α;
6. Một số đường dây trên không truyền tải điện xoay chiều không thể tăng công
suất. Nhưng nếu thiết lập lại với việc nâng cấp cho truyền tải một chiều thì có thể tăng
khả năng truyền tải.
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
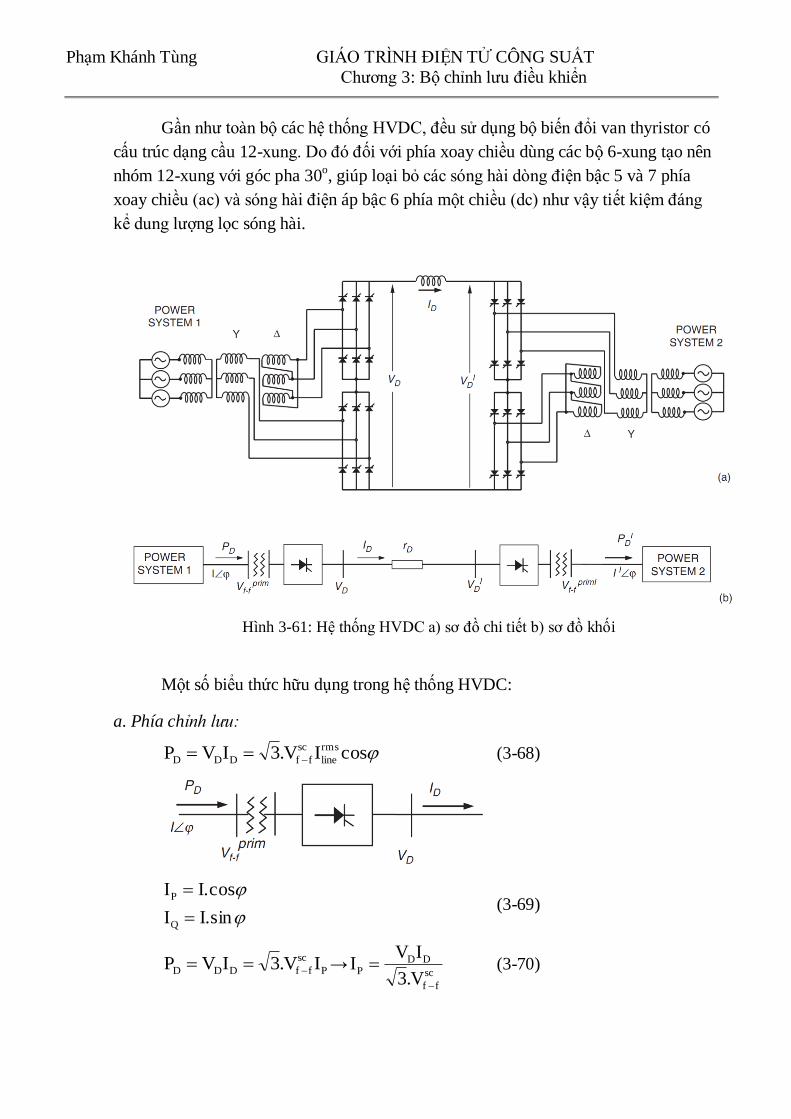
Gần như toàn bộ các hệ thống HVDC, đều sử dụng bộ biến đổi van thyristor có
cấu trúc dạng cầu 12-xung. Do đó đối với phía xoay chiều dùng các bộ 6-xung tạo nên
nhóm 12-xung với góc pha 30o, giúp loại bỏ các sóng hài dòng điện bậc 5 và 7 phía
xoay chiều (ac) và sóng hài điện áp bậc 6 phía một chiều (dc) như vậy tiết kiệm đáng
kể dung lượng lọc sóng hài.
Hình 3-61: Hệ thống HVDC a) sơ đồ chi tiết b) sơ đồ khối
Một số biểu thức hữu dụng trong hệ thống HVDC:
a. Phía chỉnh lưu:
cosIV.3IVP rms
line
sc
ffDDD (3-68)
sin.II
cos.II
Q
P
(3-69)
P
sc
ffDDD IV.3IVP →sc
ff
DDP
V.3
IVI
(3-70)

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
)(2cos2cosL.4
V3aI
S
sc
ff
2
P
(3-71)
22sin)(2sinL.4
V3aI
S
sc
ff
2
Q (3-72)
2
coscos6aII DP
(3-73)
Thành phần cơ bản của dòng thứ cấp
6aII D (3-74)
Do đó:
2
coscos.IIP
(3-75)
Vì cos.IIP nên:
2
coscoscos
(3-76)
b. Phía nghịch lưu
Tất cả các công thức chỉnh lưu được áp dụng sang phía nghịch lưu, nhưng thay
thế góc mở α bằng góc γ, trong đó γ được tính
)(180o (3-77)
Hình 3-62: Định nghĩa góc γ cho nghịch lưu: (a) chỉnh lưu và (b) nghịch lưu
Công suất phản kháng luôn theo hướng nghịch lưu

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
II
II
sc
I.ff
2
IQI 22sin)(2sin
L.4
V3aI
(3-78)
3.2.1.12. Bộ biến đổi kép
Bộ biến đổi kéo được dùng trong một số trường hợp cần điều khiển động cơ ở
nhiều chế độ làm việc trong cả bốn góc phần tư và những bộ biến đổi ba pha công suất
lên tới 2MW. Hình 3-63 là cấu trúc bộ biến đổi kép.
Hình 3-63: Bộ biến đổi kép
Trong bộ biến đổi kép, một chỉnh lưu đưa ra dòng điện dương cho tải và bộ còn
lại đưa dòng điện âm. Do sự khác biệt giữa điện áp của 2 chỉnh lưu mà tạo nên dòng
điện chạy qua cầu điện cảm, dòng điện này bị hạn chế bởi điện cảm LD, như trong hình
3-63. Hai bộ chỉnh lưu được điều khiển sao cho góc mở α+ của bộ chỉnh lưu cấp dòng
dương, thì góc mở của bộ chỉnh lưu cấp dòng âm α− = 180
o − α
+.
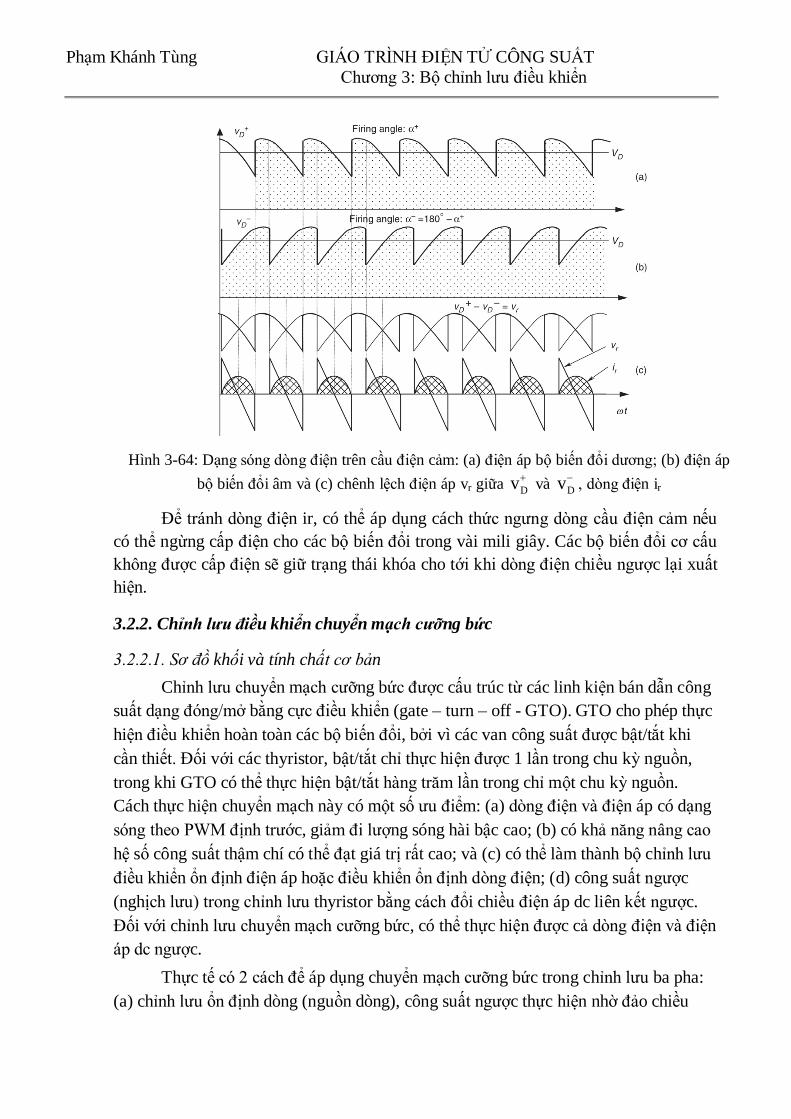
Trong hình 3-64 là dạng sóng điện áp tức thời của mỗi bộ chỉnh lưu
Dv và
Dv .
Mặc dù điện áp trung bình VD giống nhau ở mỗi bộ biến đổi, nhưng khác biệt của giá
trị tức thời được ký hiệu như điện áp vr, tạo nên dòng điện trên cầu điện cảm ir chồng
lên dòng điện tải
Di và
Di
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-64: Dạng sóng dòng điện trên cầu điện cảm: (a) điện áp bộ biến đổi dương; (b) điện áp
bộ biến đổi âm và (c) chênh lệch điện áp vr giữa
Dv và
Dv , dòng điện ir
Để tránh dòng điện ir, có thể áp dụng cách thức ngưng dòng cầu điện cảm nếu
có thể ngừng cấp điện cho các bộ biến đổi trong vài mili giây. Các bộ biến đổi cơ cấu
không được cấp điện sẽ giữ trạng thái khóa cho tới khi dòng điện chiều ngược lại xuất
hiện.
3.2.2. Chỉnh lưu điều khiển chuyển mạch cưỡng bức
3.2.2.1. Sơ đồ khối và tính chất cơ bản
Chỉnh lưu chuyển mạch cưỡng bức được cấu trúc từ các linh kiện bán dẫn công
suất dạng đóng/mở bằng cực điều khiển (gate – turn – off - GTO). GTO cho phép thực
hiện điều khiển hoàn toàn các bộ biến đổi, bởi vì các van công suất được bật/tắt khi
cần thiết. Đối với các thyristor, bật/tắt chỉ thực hiện được 1 lần trong chu kỳ nguồn,
trong khi GTO có thể thực hiện bật/tắt hàng trăm lần trong chỉ một chu kỳ nguồn.
Cách thực hiện chuyển mạch này có một số ưu điểm: (a) dòng điện và điện áp có dạng
sóng theo PWM định trước, giảm đi lượng sóng hài bậc cao; (b) có khả năng nâng cao
hệ số công suất thậm chí có thể đạt giá trị rất cao; và (c) có thể làm thành bộ chỉnh lưu
điều khiển ổn định điện áp hoặc điều khiển ổn định dòng điện; (d) công suất ngược
(nghịch lưu) trong chỉnh lưu thyristor bằng cách đổi chiều điện áp dc liên kết ngược.
Đối với chỉnh lưu chuyển mạch cưỡng bức, có thể thực hiện được cả dòng điện và điện
áp dc ngược.
Thực tế có 2 cách để áp dụng chuyển mạch cưỡng bức trong chỉnh lưu ba pha:
(a) chỉnh lưu ổn định dòng (nguồn dòng), công suất ngược thực hiện nhờ đảo chiều

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
điện áp; và (b) chỉnh lưu ổn định áp (nguồn áp), công suất ngược thực hiện nhờ dảo
chiều dòng điện. Hình 3-65 trình bày sơ đồ khối nguyên lý của cả hai loại.
Hình 3-65: Chuyển mạch cưỡng bức: a) chỉnh lưu ổn định dòng (nguồn dòng) và b) chỉnh lưu
ổn định áp (nguồn áp)
3.2.2.2. Nguyên lý chỉnh lưu ổn định điện áp
Chỉnh lưu ổn định điện áp được sử dụng rất phổ biến, và có thể áp dụng cả hai
sơ đồ trên hình 3-65.
Chỉnh lưu ổn định điện áp hoạt động dựa trên liên kết điện áp một chiều với giá
trị mong muốn (ổn định) sử dụng vòng điều khiển hồi tiếp như trên hình 3-66. Để thực
hiện được nhiệm vụ đó, liên kết điện áp được đo và so sánh với giá trị cần ổn định
VREF. Sai số được thiết bị so sánh phát hiện được dùng điều khiển 6 van công suất bật
và tắt. Như vậy, công suất có thể truyền sang phía nguồn xoay chiều (ac) theo yêu cầu
của điện áp một chiều (dc) được đo trên tụ CD.
Khi dòng điện ID có giá trị dương (chế độ chỉnh lưu), tụ điện CD được xả, tín
hiệu sai lệch điện áp tác động tới khối điều khiển tăng truyền công suất từ phía nguồn
xoay chiều, khối điều khiển tạo ra các tín hiệu PWM tương ứng cấp cho 6 van công
suất. Với dòng điện càng lớn từ phía ac sang phía dc giúp phục hồi điện áp trên tụ
điện.
Ở chiều ngược lại, nếu dòng điện ID trở nên âm (chế độ nghịch lưu), tụ điện CD
nạp quá điện tích và tín hiệu sai lệch cấp cho khối điều khiển xả tụ và truyền công suất
sang phía xoay chiều.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-66: Nguyên lý của chỉnh lưu ổn định điện áp
Bộ điều khiển PWM không chỉ điều khiển luồng công suất tác dụng mà còn có
tác dụng lên công suất phản kháng, như vậy chỉnh lưu loại này còn có khả năng điều
chỉnh hệ số công suất. Hơn nữa dạng sóng dòng điện xoay chiều còn có dạng gần sin,
giảm các sóng hài cho nguồn xoay chiều.
PWM bao gồm chuyển mạch của các van công suất ON và OFF, theo chế độ đã
định trước có dạng sóng sin của dòng hoặc áp. Ví dụ, điều chế của một pha có thể như
trong hình 3-67. Điều chế độ rộng xung thực chất là sóng chu kỳ có giá trị thành phần
điện áp cơ bản cùng tần số với mẫu. Biên độ của thành phần cơ bản được gọi là VMOD,
trên hình 3-67 ta cũng có thể thấy tỉ lệ của biên độ VMOD với mẫu.
Hình 3-67: Mẫu PWM và giá trị cơ bản VMOD
Để bộ chỉnh lưu làm việc tốt, PWM phải tạo được sóng VMOD với cùng tần số
của nguồn. Thay đổi biên độ cũng như góc lệch pha so với nguồn xoay chiều, thiết bị
chỉnh lưu có thể được điều khiển để hoạt động trong cả 4 góc phần tư: chỉnh lưu tăng
hệ số công suất, chỉnh lưu giảm hệ số công suất, nghịch lưu tăng hệ số công suất,
nghịch lưu giảm hệ số công suất. Bằng cách thay đổi mẫu của PWM, như trong hình 3-
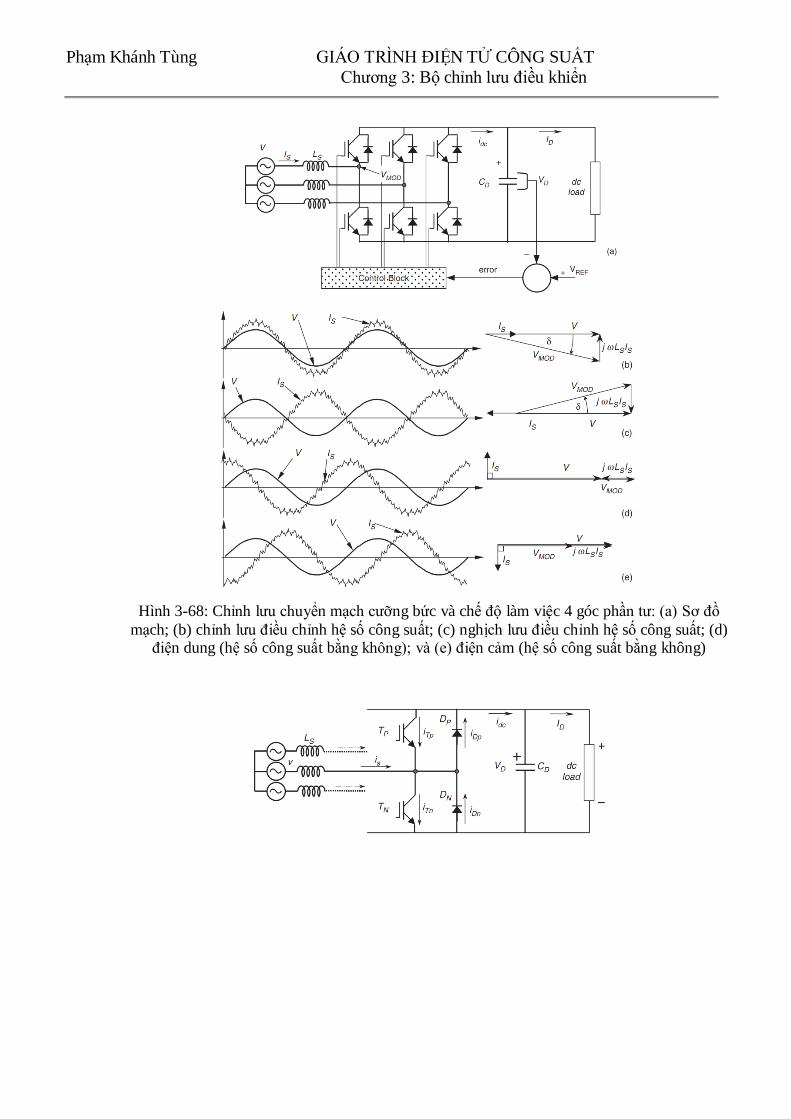
68, dẫn đến thay đổi độ lớn của VMOD, dịch chuyển mẫu PWM tạo ra độ lệch pha.
Tương tác giữa VMOD và V (điện áp nguồn) có thể thấy được qua biểu đồ pha,
và được hiểu biết đến như chỉnh lưu có khả năng làm việc tại 4 góc phần tư. Trong
hình 3-68, các chế đó được liệt kê: (a) chỉnh lưu điều chỉnh hệ số công suất; (b) nghịch
lưu điều chỉnh hệ số công suất; (c) điện dung (hệ số công suất bằng không); và (d) điện
cảm (hệ số công suất bằng không).
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-68: Chỉnh lưu chuyển mạch cưỡng bức và chế độ làm việc 4 góc phần tư: (a) Sơ đồ
mạch; (b) chỉnh lưu điều chỉnh hệ số công suất; (c) nghịch lưu điều chỉnh hệ số công suất; (d) điện dung (hệ số công suất bằng không); và (e) điện cảm (hệ số công suất bằng không)

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-69: Sơ đồ, dạng sóng dòng điện nguồn, các van công suất, một chiều hồi tiếp
Trên hình 3-69, giá trị hiệu dụng của dòng điện xoay chiều nguồn is là IS. Dòng
điện này đi qua các van bán dẫn như trong hình 3-69, trong nửa chu kỳ dương,
transistor TN, nối phía âm của điện áp hồi tiếp, được bật và dòng điện chảy qua TN
(iTN). Dòng điện quay trở lại nguồn và đi qua van công suất khép vòng với pha khác,
đi qua diode nối với cực âm của điện áp hồi tiếp. Dòng điện này còn có thể đi qua tải
một chiều (nghịch lưu) và quay trở về thông qua transistor ở phía cực dương của điện
áp hồi tiếp. Khi transistor TN bị tắt, đường đi dòng điện bị ngắt và dòng điện đi qua
diode DP, nối với cực dương của điện áp hồi tiếp. Dòng điện này được gọi là iDp trong
hình 3-69, đến trực tiếp điện áp hồi tiếp giúp tạo nên dòng điện idc, nạp cho tụ CD và
cho phép chỉnh lưu truyền công suất sang phía dc. Điện cảm LS rất quan trọng trong
quá trình này bởi tạo ra điện áp cảm ứng cho phép mở dẫn diode DP. Hoạt động tương
tự cũng diễn ra với nửa chu kỳ âm nhưng với TP và DN (hình 3-64).
Dưới chế độ nghịch lưu, dòng điện có lối đi khác qua transistor, chủ yếu từ tụ
điện CD. Còn chế độ chỉnh lưu, sơ đồ làm việc như bộ tăng áp còn chế độ nghịch lưu –
chế độ buck.
Để kiểm soát hoàn toàn hoạt động của bộ chỉnh lưu, 6 diode của nó phải được
phân cực ngược với tất cả các giá trị tức thời của điện áp nguồn. Nếu ngược lại, các
diode sẽ dẫn, và bộ chỉnh lưu PWM giống như bộ chỉnh lưu cầu diode. Cách khóa
diode là đảm bảo điện áp dc hồi tiếp lớn hơn biên độ điện áp do riêng các diode tạo ra.
Diode luôn được phân cực ngược, và chúng chỉ dẫn khi một trong hai transistor được
bật. Điện áp VD, được duy trì tại tụ điện, phải cao hơn điện áp chỉnh lưu cầu diode
thông thường. Để có được điều kiện này, bộ chỉnh lưu phải có vòng điều khiển như
trong hình 3-66.
3.2.2.3. Điều khiển điện áp DC hồi tiếp
Điều khiển điện áp một chiều hồi tiếp cần phải có vòng điều khiển hồi tiếp. Như
đã giải thích ở mục trước, điện áp VD được so sánh với điện áp tham chiếu Vref (mong
muốn) và tín hiệu “e” có được từ bộ so sánh này được dùng để tạo mẫu dạng sóng.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Mẫu dạng sóng này phải là sóng sin và có cùng tần số với nguồn xoay chiều. Mẫu
dạng sóng xoay chiều được dùng để điều chế độ rộng xung và cho phép điều khiển bộ
chỉnh lưu theo hai chế độ khác nhau: (1) chỉnh lưu PWM điều khiển dòng và (2) chỉnh
lưu PWM điều khiển áp. Phương pháp thứ nhất điều khiển dòng điện nguồn, còn
phương pháp thứ hai điều khiển độ lớn điện áp pha VMOD. Điều khiển dòng là phương
pháp đơn giản hơn so với điều khiển áp, và nguyên nhân được giải thích ngay dưới
đây.
a. Chỉnh lưu PWM điều khiển dòng
Phương pháp điều khiển được trình bày trên hình 3-70, cấu trúc bộ điều khiển
dựa trên đo giá trị tức thời dòng điện pha và điều khiển nó theo dạng sóng sin theo
mẫu tham chiếu I_ref, biên độ của dòng tham chiếu Imax có thể xác định từ phương
trình
)vV(Ge.GI DREÈCCmax (3-79)
Trong đó GC được thể hiện trong hình 3-70 và là bộ điều khiển có dạng PI, P,
Fuzzy hoặc khác. Dạng sóng sin mẫu được lấy bằng cách nhân giá trị Imax với hàm
sin có cùng tần số với nguồn và góc lệch pha mong muốn φ. Sau đó sóng mẫu phải
được đồng bộ hóa với nguồn xoay chiều. Sau đó bộ điều chế xung PWM sẽ phát xung
tương ứng với sóng mẫu.
Hình 3-70: Sơ đồ chỉnh lưu PWM điện áp nguồn điều khiển dòng
Nhưng có một vấn đề phát sinh với bộ chỉnh lưu ở chỗ vòng điều khiển hồi tiếp
điện áp VC có thể không ổn định. Do đó khi thiết kế bộ chỉnh lưu cần phải chú ý đến
tính không ổn định này. Biểu diễn điện áp hồi tiếp và bộ điều khiển GC, sơ đồ điều
khiển bộ chỉnh lưu có thể trình bày dưới dạng sơ đồi khối và hàm truyền như trên hình

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
3-70. Đây là sơ đồ điều khiển hệ tuyến tính liên tục tại điểm làm việc ổn định, được
thiết lập thông qua giá trị hiệu dụng của dòng điện nguồn IS.
Hình 3-71: Vòng điều khiển bộ chỉnh lưu biểu diễn bằng hàm truyền
Các khối G1(s) và G2(s) là các hàm truyền của bộ điều khiển chỉnh lưu và của tụ
điện hồi tiếp CD.
)sILI.R2cosV(3)s(I
)s(P)s(G SSS
S
11
(3-80)
s.C.V
1
)s(P)s(P
)s(V)s(G
DD21
D2
(3-81)
Trong đó ΔP1(s) và ΔP2(s) – công suất đầu vào và đầu ra của bộ chỉnh lưu đã
được biến đổi Laplace, V – điện áp hiệu dụng của nguồn xoay chiều (điện áp pha), IS –
dòng điện nguồn được điều khiển theo sóng mẫu, LS – điện cảm lọc nguồn và R – điện
trở giữa nguồn và bộ chỉnh lưu. Theo tiêu chuẩn ổn định hệ thống và giả thiết bộ điều
khiển PI, ta có quan hệ sau:
SP
DDS
LK.3
VCI (3-82)
ISP
PS
KLK.R2
cos.V.KI
(3-83)
Hai biểu thức trên rất hữu dụng khi thiết kế bộ chỉnh lưu điều khiển dòng. Quan
hệ giữa giá trị của tụ điện CD, điện áp dc VD, điện áp hiệu dụng nguồn, điện trở và điện
cảm lọc nguồn và hệ số công suất với trị hiệu dụng dòng điện IS. Với các quan hệ giữa
các đại ượng trên, hệ số tỉ lệ và hệ số độ nhạy KP, KI (các khâu P, I) có thể được tính
toán để đảm bảo sự làm việc ổn định của bộ chỉnh lưu. Các biểu thức trên thiết lập giới
hạn cho hoạt động của bộ chỉnh lưu do dòng điện IS không có giá trị âm trong các biểu
thức trên.
Nếu các giới hạn ổn định trên được thỏa mãn, bộ chỉnh lưu sẽ giữ cho điện áp
một chiều trên tụ bằng giá trị Vref (bộ điều khiển PI) trong mọi điều kiện của tải và
truyền công suất từ phía ac sang phía dc. Với chế độ nghịch lưu, công suất sẽ truyền
theo hướng ngược lại.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Khi các vấn đề ổn định được giải quyết, mẫu sóng sin được tạo, phương pháp
điều chế độ rộng xung sẽ phải tạo ra chuỗi xung cấp cho các van công suất. Chuỗi
xung đóng mở các van công suất để có được dạng dòng điện xoay chiều I_line theo
dạng mẫu mong muốn I_ref. Có nhiều phương pháp điều chế độ rộng xung cho chỉnh
lưu điều khiển dòng, nhưng được sử dụng phổ biến hơn cả là các phương pháp: lấy
mẫu chu kỳ (periodical sampling - PS), khâu trễ pha (hysteresis band - HB), và sóng
xung tam giác (triangular carrier - TC).
Phương pháp PS bật tắt van công suất của bộ chỉnh lưu bằng chuyển đổi xung
vuông có tần số cố định là tần số lấy mẫu chu kỳ. Mỗi chuyển đổi xung vuông có sự so
sánh giữa I_ref và I_line và từ đó có điều chỉnh. Như trên hình 3-72a, cách thức điều
khiển này rất đơn giản: chỉ dùng một bộ so sánh và D-type flip-flop cho mỗi pha. Ưu
điểm chính của phương pháp này là thời gian nhỏ nhất giữa các lần chuyển mạch van
công suất giới hạn bằng thời gian chu kỳ lấy mẫu. Đặc điểm này xác lập tần số chuyển
mạch cực đại của bộ biến đổi, còn tần số trung bình không xác định được rõ ràng.
Phương pháp HB bật tắt van công suất của bộ chỉnh lưu khi có sai số giữa I_ref
và I_line vượt quá độ lớn nhất định: trễ pha. Sơ đồ trên hình 3-72b, cách điều khiển
này cần bộ trễ pha cho mỗi pha. Trường hợp này, tần số chuyển mạch không thể xác
định, nhưng giá trị lớn nhất có thể tính qua biểu thức sau:
S
Dmax
SL.h4
Vf (3-84)
Trong đó: h – độ lớn của khâu trễ.
Hình 3-72: Phương pháp điều chế độ rộng xung (a): lấy mẫu chu kỳ; (b): khâu trễ pha và (c) dựa
trên sóng xung tam giác.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Phương pháp TC, trên hình 3-72c, so sánh giữa sai số của I_ref và I_line với
sóng tam giác có tần số cố định. Sai số được khuyêc đại qua khâu tích phân tỉ lệ (PI)
trước khi được so sánh với xung tam giác.Như đã thấy, sơ đồ điều khiển này đầy đủ
hơn so với PS và HB. Các giá trị KP và KI xác định đáp ứng và sai số ổn định của hệ
thống, như trong các biểu thức dưới là các giá trị đáp ứng đặc tính động với các diều
kiện khác nhau.
D
CSP
V2
.LK
(3-85)
PCI K.K (3-86)
Trong đó: LS – tổng trở kháng bộ chỉnh lưu, ωc – tần số xung tam giác và VD –
điện áp hồi tiếp của bộ chỉnh lưu.
Đánh giá độ méo (do sóng hài) ở các phương pháp điều khiển trên, có biểu
thức:
T
2
rms
dtref_Iline_IT
1
I
100Distorsion% (3-87)
Hình 3-73a dạng sóng dòng điện được điều khiển bằng ba phương pháp. Ví dụ
được thực hiện với tần số chuyển mạch khoảng 1,5kHz. Phương pháp PS có chất
lượng xấu nhất nhưng bù lại có cách thực hiện đơn giản. Phương pháp HB và TC với
khâu điều khiển PI có chất lượng giống nhau và phương pháp TC với khâu tỉ lệ có độ
dịch pha dòng điện nhỏ. Và hình 3-73b cho thấy với tần số chuyển mạch cao chất
lượng các phương pháp gần như nhau, với tần số lớn hơn 6kHz, độ méo nhỏ như nhau
cho cả 3 phương pháp.
Hình 3-73: Dạng sóng các phương pháp điều khiển với tần số 1,5kHz và Ls = 15mH: (a) PS; (b)
HB; (c) TC với PI và (d) TC chỉ có P. Độ méo theo tần số chuyển mạch.
b. Chỉnh lưu PWM điều khiển áp
Hình 3-74, trình bày một pha hệ thống điều khiển điện áp nguồn bằng chỉnh lưu
điều khiển áp. Sơ đồ này đại diện cho mạch tương đương với yếu tố cơ bản phía nguồn
thuần túy sin và hồi tiếp thuần một chiều. Nguyên tắc điều khiển ở đây là tạo ra điện

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
áp mẫu VMOD, dựa theo biên độ và góc pha so với điện áp nguồn V. Bằng cách này,
dòng điện nguồn được điều khiển không thông qua việc đo đếm chúng. Điện áp mẫu
VMOD được tạo nên dựa trên phương trình vi phân của chỉnh lưu.
Phương trình vi phân dưới đây có nguồn gốc từ sơ đồ 3-74
)t(vi.Rdt
diL)t(v MODS
sS (3-88)
Giả thiết rằng tsin2V)t(v , khi đó lời giải của phương trình vi phân iS(t)
dùng tạo điện áp mẫu VMOD đảm bào bộ chỉnh lưu làm việc với hệ số công suất nhất
định có dạng:
)tsin(I)t(i maxS (3-89)
Kết hợp các công thức 3-88, 3-89 và điện áp nguồn là hàm theo thời gian, ta có
thể xác định được VMOD với biên độ và góc pha
tcossin)dt
dILRI(cosIX
tsincos)dt
dILRI(sinIX2V)t(v
maxSmaxmaxS
maxSmaxmaxSMOD
(3-90)
Biểu thức 3-90 cho thấy mẫu điện áp VMOD được kiểm soát bởi giá trị thay đổi
của dòng điện nguồn Imax. Sử dụng các đạo hàm của Imax trong 3-90 có ý nghĩa bởi vì
dòng điện Imax thay đổi mỗi khi thay đổi tải. Đại lượng XS trong 3-90 chính là ωLS.
Biểu thức trên có thể viết với hệ số công suất bằng 1 có nghĩa cosφ = 1 và sinφ = 0.
tcosIX
tsindt
dILRI2V)t(v
maxS
maxSmaxMOD
(3-91)
Hình 3-74: Sơ đồ một pha của chỉnh lưu điện áp nguồn điều khiển áp
Với biểu thức cuối cùng, chỉnh lưu nguồn áp điều khiển PWM điện áp với hệ số
công suất bằng 1 có thể thực hiện trên sơ đồ hình 3-75. Từ các biểu thức 3-90 và 3-91

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
có thể xây dựng được mẫu điện áp VMOD thay đổi theo độ lớn và góc pha để điều khiển
hoàn toàn chỉnh lưu đạt hệ số công suất bằng một.
So sánh với sơ đồ khối điều khiển trong hình 3-65, chỉnh lưu ổn định điện áp
điều khiển áp không cần phải lấy tín hiệu dòng điện nguồn. Tuy nhiên để có được tính
ổn định tốt như phương pháp điều khiển dòng, các khối “–R–sLS” và “–XS” trong
hình 3-75 cần được mô phỏng và tái tạo chính xác các giá trị của R, XS và LS của
nguồn xoay chiều. Nhưng các thông số đó không còn là hằng số, và điều này ảnh
hưởng đến tính ổn định của hệ thống như trong hinh 12.43.
Ở trạng thái ổn định, Imax là hằng số, biểu thức 3-91 có thể viết dưới dạng véc
tơ, được biểu thức 3-92.
SSSMOD IjXI.RVV (3-92)
Hình 3-75: Sơ đồ chỉnh lưu điều khiển áp cho hệ số công suất bằng một
Với điện áp mẫu VMOD đã được tạo, cần phải sử dụng phương pháp điều chế
PWM để điều khiển chuyển mạch các van công suất. Như trong phần trình bày phương
pháp chỉnh lưu điều khiển dòng, có nhiều phương pháp điều chế mẫu được gọi: điều
chế mẫu theo sóng sin PWM (SPWM), sử dụng sóng xung tam giác như trong hình 3-
77. Phương pháp này có hai thông số quan trọng: biên độ tỉ lệ hoặc chỉ số tỉ lệ m, và tỉ
lệ điều chế tần số p.
max
TRIANG
max
MOD
V
Vm (3-94)
S
r
f
fp (3-95)

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Trong đó: max
MODV , max
TRIANGV - là biên độ điện áp mẫu VMOD và điện áp xung tam
giác VTRIANG tương ứng. Bên cạnh đó, fS – tần số nguồn xoay chiều và fr – tần số xung
tam giác. Trong hình 3-77, m = 0,8 và p = 21. Khi m > 1 hiện tượng quá điều chế.
Phương pháp điều chế trong hình 3-77, có thành phần hài thay đổi theo p và m. Khi p
< 21, chuyển sang chế độ điều chế PWM đồng bộ có ý nghĩa xung tam giác lúc đó cần
đồng bộ. Bên cạnh đó, để hạn chế các sóng hài, giá trị p cần phải là số nguyên, nếu p
là số lẻ thành phần hài bị loại bỏ, nếu p là bội số của 3, điều chế PWM trên ba pha
giống nhau. Nếu giá trị m tăng, biên độ của thành phần điện áp cơ bản tăng tỉ lệ thuận,
nhưng một số thành phần hài giảm. Chế độ quá điều chế (m > 1), thành phần điện áp
cơ bản tăng không tỉ lệ và có xuất hiện một số thành phần hài.
Hình 3-76: Chỉnh lưu điều khiển áp cho hệ số công suất bằng một với các tải khác nhau

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
Hình 3-77: Điều chế sóng sin PWM dùng xung tam giác
c. Chỉnh lưu PWM điều khiển tải
Phương pháp đơn giản điều khiển chỉnh lưu PWM công suất nhỏ (10 – 20 kW)
được dự trên nguyên tắc điều khiển trực tiếp dòng điện một chiều. Hình 3-78 là sơ đồ
khối của hệ thống điều khiển. Điện áp mẫu VMOD được tạo ra dựa trên mẫu PWM,
được lựa chọn sao cho giảm thiểu các sóng hài. Như vậy mẫu PWM không thay đổi,
do đó có thể được lưu trữ trong bộ nhớ ROM.
Nguyên tắc điều khiển dự trên thay đổi góc công suất δ giữa điện áp nguồn V
và điện áp mẫu VMOD. Khi góc δ thay đổi, lượng công suất truyền từ phía xoay chiều
dang một chiều cũng thay đổi. Khi góc công suất âm (VMOD chậm pha so với V), công
suất truyền từ ac sang dc, còn khi góc công suất dương, công suất truyền theo hướng
ngược lại. Như vậy, góc công suất có thể điều khiển được thông qua dòng điện dc ID.
Không cần theo dõi tín hiệu điện áp VD, bởi vì cách điều khiển này thiết lập sự ổn định
điện áp một chiều theo các giá trị khác nhau của dòng điện và góc công suất. Với các
tính chất đó, có thể tìm được mối quan hệ giữa dòng điện ID và góc δ để có được điện
áp dc không đổi đối với tất cả các tải. Quan hệ được biểu diễn theo biểu thức
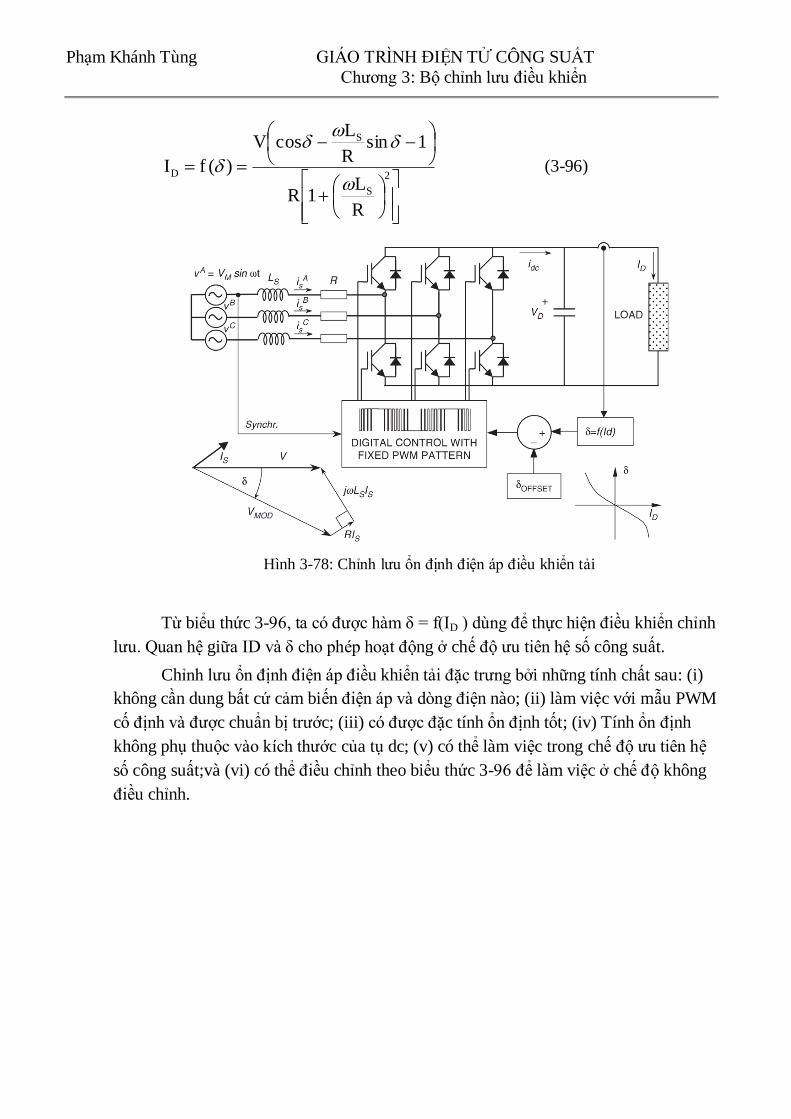
Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển
2
S
S
D
R
L1R
1sinR
LcosV
)(fI
(3-96)
Hình 3-78: Chỉnh lưu ổn định điện áp điều khiển tải
Từ biểu thức 3-96, ta có được hàm δ = f(ID ) dùng để thực hiện điều khiển chỉnh
lưu. Quan hệ giữa ID và δ cho phép hoạt động ở chế độ ưu tiên hệ số công suất.
Chỉnh lưu ổn định điện áp điều khiển tải đặc trưng bởi những tính chất sau: (i)
không cần dung bất cứ cảm biến điện áp và dòng điện nào; (ii) làm việc với mẫu PWM
cố định và được chuẩn bị trước; (iii) có được đặc tính ổn định tốt; (iv) Tính ổn định
không phụ thuộc vào kích thước của tụ dc; (v) có thể làm việc trong chế độ ưu tiên hệ
số công suất;và (vi) có thể điều chỉnh theo biểu thức 3-96 để làm việc ở chế độ không
điều chỉnh.

Phạm Khánh Tùng GIÁO TRÌNH ĐIỆN TỬ CÔNG SUẤT
Chương 3: Bộ chỉnh lưu điều khiển





























