2. Karakteristike analognog signala ? Analogni ulazi prihvataju
niz naponskih vrednosti od nule do pune skale. Koliko e naponskih
nivoa prepoznati PLC zavisi od rezolucije. Na primer, ako je
naponski opseg analognog ulaznog kanala 0-10V, a rezolucija 10 bita
(210=1024 nivoa), najmanja vrednost koju e PLC moi da prepozna je
10/1024 0.01V. to veu rezoluciju ima PLC to moemo raditi sa
preciznijim vrednostima. 3. Karakteristike digitalnog signala ? Na
digitalne ulaze dolazi naponski signal u samo dva stanja (0 ili 1,
radi ili ne radi, true ili false...). Takav signal dolazi sa
elemenata kao to su prekidai, tasteri, fotoelije... Na primer, ako
je digitalni ulaz u rasponu 0-24V, sva naponska stanja preko 22V e
biti prepoznata kao 1 (ON, True, radi..), a sve manje od 2V e biti
prepoznato kao 0 (OFF, False, ne radi...). Vrednosti izmeu 2V i 22V
e biti nedefinisane. 4. AD konvertor? 5. Dve glavne karakteristike
AD konvertora (brzina konverzije i rezolucija)? A/D KONVERTOR To je
elektronski ureaj koji naponski signal pretvara u odgovarajuu
numeriku vrednost. A/D radi tako to napon koji je doveden na ulaz
uporeuje sa naponom koji on interno generie. A/D uporeuje niz
vrednosti (interno generisani napon se gradualno poveava), a
zaustavlja se kada interno generisani napon postane jednak (sa
unapred definisanim odstupanjima) naponu na ulazu. Bitan podatak za
A/D konvertor je radni opseg. To je naponski opseg sa kojime A/D
konvertor moe da radi (npr. 0-5V, ili 5, 10V...). Dve osobine A/D
konvertora su kljune za njegov rad 1) Brzina konverzije 2)
Rezolucija BRZINA KONVERZIJE Proces konverzije (tj. uporeivanja
interno generisanog napona sa naponom na ulazu u A/D konvertor)
zahteva vreme. To vreme se meri u milisekundama, ali se ne sme
zanemariti. Vremenski razmak izmeu dva uzorkovanja ne sme biti
manji od vremena potrebnog za konverziju u A/D konvertoru!!! Brzina
konvertovanja diktira uestanost uzorkovanja. to je vea brzina
uzorkovanja, to je merenje preciznije, tj. naa predstava o promeni
fizike veliine koju pratimo je blia realnosti. Pokaimo to kroz dva
primera. REZOLUCIJA Rezolucija nam govori o tome na koliko nivoa je
podeljen naponski radni opseg konvertora. Rezolucija A/D konvertora
se izraava u bit-ovima. Broj nivoa je stepen broja dva (2). To znai
da osmobitni (8 bit) A/D konvertor raspolae sa 28=256 nivoa.
Konkretan primer bi bio sledei. Najmanja vrednost koju desetobitni
(10 bit) A/D konvertor, radnog opsega 0-10V, moe da pokae je
10V/210=10V/1024 10mV. Ta vrednost se naziva LSB
(Least Significant Bit). U cilju to preciznijeg merenja potrebno
je da i rezolucija A/D konvertora bude vea.
6. Sample and hold kolo? SAMPLE AND HOLD KOLO (S/H) Zadatak S/H
kola je da prihvati naponski nivo koji se dovodi na ulaz i da ga
odrava sve dok A/D konvertor (A/D) ne izvri konverziju. Za
odravanje naponskog nivoa u S/H kolu je zaduen kondenzator.
Uestanost kojom rad S/H je uslovljena brzinom konverzije A/D
konvertora. Ako bi vrednost napona na ulaznom portu A/D bila
promenljiva, proces komparacije ne bi mogao da bude obavljen
dovoljno precizno. Interno generisani napon ne bi mogao da bude
jednak sa naponom na ulazu, ako se ovaj stalno menja. Odravanje
napona na ulazu konstantnim je upravo zadatak S/H kola.
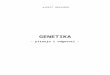
PRINCIP RADA S/H KOLA
Na slici se moe videti kako se rad S/H manifestuje. Sivom bojom
je oznaen signal koji dolazi sa nekog senzora. Zelenom bojom su
oznaene take koje smo u mogunosti da uzorkujemo (s obzirom na
sample rate i brzinu konverzije A/D). Poto su to jedine vrednosti
koje mi vidimo iz celog signala, slika koju dobijamo je sledea
Slika koju smo dobili ne odraava u potpunosti verno izgled
signala koji smo pratili. Plava isprekidana linija spaja take koje
smo uzorkovali, i mi PRETPOSTAVLJAMO da se neuzorkovane take nalaze
na toj liniji, ili u njenoj neposrednoj blizini. Jasno je da e
slika koju dobijamo biti
blia realnoj slici ukoliko budemo uzorkovali vei broj taaka iz
signala. To znai da moramo uzorkovati veom brzinom. Rzmotriemo dva
karikirana sluaja. Sluaj ekstremno sporog uzorkovanja i sluaj jako
brzog uzorkovanja.
KARIKIRANI PRIMER SPOROG UZORKOVANJA
PRIMER UZORKOVANJA KOJEM SE TEI (BRZO UZORKOVANJE) Na slici koja
predstavlja jako sporo uzorkovanje je predstavljena pojava koja se
zove aliasing. Deava se onda kada je uestanost uzorkovanja daleko
manja od frekvence signala. Stvara se lana slika o signalu koji
pratimo (evidentno je na gornjoj slici da smo jako sporim
uzorkovanjem potpuno izgubili jedan pozitivan i dva negativna
pika). Najkvistova teorema (pravilo poznato i pod nazivom enonov
obrazac) kae da je neophodno da uestanost uzorkovanja bude bar dva
puta vee od frekvence signala koji se prati kako ne bi dolo do
aliasing-a. 7. Multiplekser? MULTIPLEKSER (MUX) Multiplekser je
elektronska komponenta koja ima vie naponskih ulaza, a samo jedan
izlaz. U jednom trenutku, na izlazu se moe dobiti signal sa samo
jednog od ulaznih kanala.
EMATSKI PRIKAZ MULTIPLEKSERA
Signali na ulaznim kanalima multipleksera ne ulaze ni u kakvu
interakciju. Oni se ne sabiraju, ne oduzimaju, ne mnoe, ne dele...
Jednostavno kroz multiplekser se u jednom trenutku proputa jedan od
ulaznih kanala. Sa kojeg od ulaznih kanala e proi signal na izlazni
kanal multipleksera, odreuje se pomou pinova za selekciju (na slici
su obeleeni sa S1 i S2). Na pinove za selekciju dolazi digitalni
signal (samo dva stanja ima napona/nema napona). Svaki od kanala
ima svoju adresu izraenu binarnim brojevima. Na primer, za
multiplekser prikazan na gornjoj slici adrese kanala bi izgledale
ovako: Ulazni kanal A B C D Adresa (binarni broj) S1 S2 0 0 0 1 1 1
0 1
Iz gornje tabele se jasno vidi da ni fiziki ne postoji ansa da
se preko pinova za selekciju odabere da kroz multiplekser prou
signali sa dva kanala istovremeno. Takoe, za vrei broj ulaznih
kanala neophodno je da postoji i vei broj pinova za selekciju. Ako
je n broj pinova za selekciju 2n mora biti vee ili jednako broju
ulaznih kanala!!!
FIZIKI IZGLED MULTIPLEKSERA
PRIMENA MULTIPLEKSERA Idealna aparatura za prikupljanje podataka
u okviru nekog mernog ili mehatronikog sistema bi izgledala
ovako:
Ovakav sistem na omoguava istovremeno procesiranje svih kanala.
Mana ovakvog sistema je jako visoka cena. Ukoliko nam nije
neophodno da se signali sa svih senzora obrauju istovremeno, moemo
upotrebiti multiplekser i umanjiti trokove sistema za tri A/D
konvertora. To bi izgledalo ovako:
Ovakva aparatura nam omoguava da i dalje istovremeno uzorkujemo
podatke sa sva etiri senzora, ali se vreme konverzije poveava etiri
puta (jedan A/D konvertor radi za sva etiri kanala). Ukoliko nam ni
simultano uzorkovanje nije neophodno, multiplekser se moe postaviti
odmah posle senzora. Na taj nain se tedi i na tri S/H kola.
Aparatura u tom sluaju izgleda ovako:
Ovako sklopljena aparatura sekvencijalno obrauje kanale. To znai
da je uzorkovanje na drugom kanalu mogue tek kada signal sa prvog
bude obraen i primljen u PLC. Uzorkovanje na treem moe poeti tek po
zavretku obrade signala sa drugog kanala, itd... Vano je napomenuti
da multiplekser moe da radi dvosmerno. To znai da se jedna vrsta
multipleksera moe koristiti sa ulazne strane PLC-a, u cilju
prikupljanja podataka, ali i sa izlazne strane PLC-a kada postoji
potreba da se jednim izlaznim kanalom PLC-a kontrolie rad veeg
broja aktuatora!!! 8. PLC? PROGRAMMABLE LOGIC CONTROLLER (PLC)
PLC je kompjuter koji se koristi za automatizaciju
elektro-mehanikih procesa. Za razliku od standardnih personalnih
raunara (PC), PLC ima veliki broj ulaznih i izlaznih portova,
otpornost na visoke temperature, prainu, vibracije, udare...
PLC je najee Real Time sistem, to znai da se aktivnosti na
izlaznim portovima izvode kao odgovor na stanje na ulaznim
portovima u definisanom periodu vremena (determinizam).
Programiranje PLC-a se vri pomou kompjutera. Koriste se svi poznati
programski jezici, kao i sve popularnija grafika okruenja za
programiranje (npr. LabView). Programski kod PLC-a se uva u ROM-u.
Konekcija kompjutera i PLC-a se ostvaruje preko Ethernet, RS-232,
RS-422 ili USB porta. U zavisnosti od broja ulaznih i izlaznih
portova PLC moe istovremeno prikupljati podatke sa vie razliitih
senzora (temperature, pritiska, protoka, pomaka...) i upravljati sa
vie razliitih vrsta aktuatora (hidrauliki i pneumatski cilindri,
elektro-motori...). Vie PLC ureaja se moe povezati u mreu i na taj
nain se moe upravljati celokupnim industrijskim postrojenjima. Neke
od funkcija PLC-a mogu preuzeti i personalni raunari. Razlika je u
tome to resurs personalnog raunara biva ozbiljno potroen na rad
operativnog sistema. PLC nema operativni sistem, tako je u
potpunosti posveen izvravanju postavljenih zadataka. KONKRETAN
PRIMER: Koristimo PC za prikupljanje podataka sa nekog senzora.
Ukoliko se u poku prikupljanja podataka pomeri mi, pritisne neki
taster na tastaturi, ili se pojavi neka nova beina internet mrea,
kompjuter NEE ignorisati te promene. On e svoj fokus usmeriti na te
dogaaje, jer je u njegovom osnovnom kodu to tako propisano. Za to
vreme, mogue je da neke od vrednosti koje stiu sa senzora kompjuter
oita pogreno, ili da mu ak neke vrednosti i potpuno promaknu
(prekid uzorkovanja). Ovakve situacije mogu ugroziti relevantnost
prikupljenih podataka. Kod PLC-a programer sam postavlja listu
prioriteta. Tako se ne moe desiti da dogaaji manje vanosti ugroze
ispravno izvravanje glavnih zadataka. Ukoliko postoji potreba da se
PLC-u neke komande zadaju u toku rada, to se radi preko HMI-a
(Human Machine Interface). HMI je interaktivni displej koji se
programira nezavisno od PLC-a. DIGITALNI I ANALOGNI ULAZI Na
digitalne ulaze dolazi naponski signal u samo dva stanja (0 ili 1,
radi ili ne radi, true ili false...). Takav signal dolazi sa
elemenata kao to su prekidai, tasteri, fotoelije... Na primer, ako
je digitalni ulaz u rasponu 0-24V, sva naponska stanja preko 22V e
biti prepoznata kao 1 (ON, True, radi..), a sve manje od 2V e biti
prepoznato kao 0 (OFF, False, ne radi...). Vrednosti izmeu 2V i 22V
e biti nedefinisane. Analogni ulazi prihvataju niz naponskih
vrednosti od nule do pune skale. Koliko e naponskih nivoa
prepoznati PLC zavisi od rezolucije. Na primer, ako je naponski
opseg analognog ulaznog kanala 0-10V, a rezolucija 10 bita
(210=1024 nivoa), najmanja vrednost koju e PLC moi da prepozna je
10/1024 0.01V. to veu rezoluciju ima PLC to moemo raditi sa
preciznijim vrednostima. 9. Memorije , razlike i primena? MEMORIJA
ROM (Read Only Memory) Kako ime kae to je vrsta memorije koja moe
samo da se ita. Njena osnovna odlika je to to ne gubi svoj sadraj
po prestanku napajanja. Najee se upotrebljava za uvanje koda koji
kontrolie rad datog ureaja. Npr. nain na koji e se neki PLC ponaati
uva se u njegovoj ROM memoriji.
Vrste ROM 1) PROM (Programmable Read Only Memory) Moe se
programirati samo jednom. To se radi na ureaju PROM programer, koji
koristi visok napon kako bi sastavio/rastavio interne veze na ipu.
2) EPROM ( Erasable Programmable Read Only Memory) Moe se brisati
sadraj ipa ako se izloi ultraljubiastom zraenju (10min.). Izlaganje
ultraljubiastim zracima (i ponovno programiranje) skrauje ivotni
vek EPROM-a. Broj brisanja/programiranja je ipak vei od hiljadu. Na
sebi imaju prozor kroz koji je predvieno da prou UV zraci u procesu
brisanja. 3) EEPROM (Electricaly Erasable Programmable Read Only
Memory) Daje mogunost brisanja sadraja ipa elektronskim putem.
FLASH memorija je moderan tip EEPROM-a. Dpzvoljava preko milion
pisanja/brisanja.
RAM (Random Access Memory) Random znai nasumino, a ukazuje na to
da se svakom podatku iz RAM moe pristupiti u bilo kom trenutku bez
obzira na na to gde se on nalazi u odnosu na prethodno korieni
podatak iz memorije. U RAM-u se uvaju podaci koji su rezultat nekih
operacija (kompjuteru, PLC-u,...) 11. Senzori? SENZORI To su
elementi koji pretvaraju neku fiziku veliinu u analogni (naponski)
signal. Svaki senzor ima svoj merni opseg. On nam govori u kom
rasponu moemo meriti eljenu fiziku veliinu, a da greka merenja
ostane u unapred zadatim granicama. Primer: 1) Za neki laserski
daljinomer merni opseg je 1-10mm 2) Za senzor temperature 0,5-100 C
Pored mernog opsega svaki senzor mora imati definisanu mernu
karakteristiku. Taj podatak nam poklazuje kakav je odnos izmeu
intenziteta fizike veliine koju merimo/pratimo i analognog signala
u koji e je senzor pretvoriti. Primer: 1) Ako je merna
karakteristika senzora temperatura 0,01V/C=10mV/C senzor e 100C
pretvoriti u 1V Greka merenja kod senzora Proizvoa senzora daje
opseg u kome ne garantuje tanost rada senzora. Taj podatak moe biti
izraen u procentima pune skale (% F.S.), ili u procentima oitanog
rezultata (%RDG). % F.S.
ta ova oznaka praktino znai? Ako je merni opseg nekog senzora
temperature 0-100C, a greka je data u oliku 1%F.S. to znai da je
greka u svakom delu mernog opsega 1% od 100C (puna skala), tj. 1C.
Tako da je pri oitavanju temperature od 100C taan rezultat u
dijapazonu od 99-101C, ali takoe i da je pri oitavanju temperature
od 10C taan rezultat u dijapazonu 9-11C. Apsolutno, greka je ista
(2C), ali je u drugom sluaju relativna greka mnogo vea. %RDG Ovaj
podatak daje relativnu greku svakog izvrenog merenja. Ako je greka
merenja senzora data u obliku 1%RDG to znai da e kod merenja
temperature od 100C greka biti 1C. Dok e kod izmerene temperature
od 50C dozvoljena greka biti 0,5C. SENZORI TEMPERATURE TERMOPAR
Termopar je najee korieni senzor temperature. Sastoji se od dve ice
koje su spojene na jednom kraju, a napravljene od razliitih
materijala. Kada na tom spoju doe do promene temperature, na
slobodnim krajevima ica se javlja razlika potencijala (napon). Ovu
pojavu je otkrio Thomas Johann Seebeck 1821. godine. Po njemu se
ova pojava naziva i Seebeck-ov efekat. Okvirno, karakteristika
termoparova je izmeu 1 i 70 V/C. Standardni termoparovi TIP B C E
Pozitivni metal Platina - 6% Rodijum Volfram - 5% Renijum Nikl -
10% Hrom Negativni metal Platina - 30% Rodijum Volfram - 26%
Renijum Bakar - 45% Nikl Merni opseg 0 - 1820C 0 - 2320C -270 -
1000C
Termoparovi se koriste tamo gde je potrebno meriti temperature u
irokom opsegu (02300C), tanou ne veom od 1C. Za manje opsege
(0-100C) i tanost od 0,1C koriste se termistori. Vano je uskladiti
osobine termopara sa osobinama kabla koji povezuje termopar sa
mernim ureajem. Kablovi ne mogu biti od istog materijala kao i ice
termopara jer bi to bilo jako skupo (mada idealno po pitanju
tanosti merenja). Zato se koriste jeftinije legure koje imaju sline
osobine. Na primer, za termopar na bazi platine, kablovi su od
bakarne legure (bakar je mnogo jeftiniji od platine). BESKONTAKTNO
MERENJE TEMPERATURE Ureaj meri energiju infracrvenog zraenja tela i
na osnovu toga daje podatak o temperaturi tog tela. Ureaj se
sastoji od soiva koje fokusira infracrveno zraenje na detektor koji
tu energiju pretvara u naponski signal. Ovakvi ureaju esto imaju
integrisan laser koji olakava ciljanje eljenje povrine. Bitan
podatak vezan za ove uraeje je Distance : Spot ratio. On nam govori
o tome kolika je povrina iju temperaturu merimo, u odnosu na
rastojanje ureaja od te povrine. Na primer,
ako je D:S = 20:1 to znai da emo sa udaljenosti od 20cm meriti
temperaturu povrine kruga prenika 1cm. Prednosti beskontaktnog
merenja temperature: 1) Merenje ne traje vie od 0,5s 2) Moe se
meriti temperatura pokretnih objekata (maine, pokretne trake,...)
3) Mogue je meriti temperature do 3000C Nedostaci: 1) Ureaj zahteva
dobru vidljivost (praina i dim oteavaju merenje) 2) Moe se meriti
iskljuivo temperatura povrina TERMISTORI Termistori su elementi za
merenje temperature ija je elektrina otpornost proporcionalna
promeni temperature. Termistori se prave od keramike ili nekih
vrsta polimera.
IZGLED TERMISTORA Termistori imaju temperaturni opseg od -90C do
130C dok im je tanost merenja oko 0,1C. Princip rada termistora se
moe prikazati kroz sledeu pojednostavljenu formulu:
R - promena otpora T - promena temperature k - temperaturni
koeficijent Vano je napomenuti da je ovde zavisnost data u
linearnom obliku, to u realnim uslovima nije sluaj. Bez
pojednostavljenja, promena elektrine otpornosti u zavisnosti od
promene temperature bi se najvernije prikazala sledeom
formulom:
U gornjoj jednaini a, b i c su tajnhart-Hartovi koeficijenti i
definiu se za svaki termistor posebno. Temperatura T je u stepenima
Kelvina, a otpornost R je u Omima. U zavisnosti od toga kojeg je
znaka temperaturni koeficijent razlikujemo dve vrste termistora.
Ukoliko je temperaturni koeficijent pozitivan re je o PTC (Positive
Temperature Coefficient) termistorima. Takoe se nazivaju i
POZITORI. Ako je temperaturni koeficijent negativan u pitanju su
NTC (Negative Temperature Coefficient) termistori. Kod PTC
termistora elektrina otpornost raste sa poveanjem temperature, dok
kod NTC termistora elektrina otpornost opada sa poveanjem
temperature. Postoje termistori koji se koriste kao prekidai. Oni
spadaju u grupu PTC termistora. Njihova promena elektrine
otpornosti u odnosu na promenu temperature nije linearna. Do nekih
temperatura otpornost ima malu vrednost. Kada temperatura dovoljno
poraste, elektrina otpornost eksponencijalno raste i prekida struju
u kolu. Ova vrsta termistora se ne koristi za merenje temperature,
ve iskljuivo u funkciji prekidaa. TERMOOTPORNI DAVA TEMPERATURE
(Resistance Temperature Detector-RTD ) Termootporni davai
temperature rade na istom principu kao termistori. Razlika je u
tome to imaju linearnu zavisnost promene elektrine otpornosti u
odnosu na promenu temperature. To je mogue jer su, za razliku od
termistora koji su od keramike i polimera, RTD napravljeni od
platine. Prirodno svojstvo platine je da joj je ova zavisnost
linearna. Termootporni davai temperature moraju biti napajani
strujom. Najpoznatiji termootporni dava je PT100. Oznaka govodi da
je elektrina otpornost ovog davaa, na 0C, 100 . Standardizovana
karakteristika termootpornih davaa temperature je 0.385/C. Merni
opseg je od -200C do 500C. U odnosu na termistore, termootporni
davai temperature, imaju vei merni opseg i stabilnost merenja, ali
manju preciznost.
TERMOOTPORNI DAVA AKCELEROMETRI PIEZOELEKTRINI Piezoefekat je
pojava da se na krajevima nekih materijala generie elektricitet
kada na njih deluje sila. Materijali koji se najee koriste su:
kvarc, barijum-titanat, olovo-cirkon.
TRI NAINA OPTEREENJA PIEZOELEKTRINIH ELEMENATA
PIEZOELEKTRINI EFEKAT Bitno je zapamtiti da piezoelektrini
elementi ne reaguju na konstantnu silu, ve samo na impuls sile.
Konkretno, to znai da ako na piezoelektrini element spustimo teg od
100kg, u prvom trenutku e se generisati odgovarajui napon (nastao
usled udara pri sputanju). im se teg smiri, napon generisan na
polovima elementa e biti nula!!! To znai da piezoelektrine elemente
ne moemo koristiti za merenje konstantnih sila (vage, davai
pritiska...), ve za merenje onih promenljivih (davai
vibracija).
S obzirom na slab izlazni signal iz senzora i veliku izlaznu
impedansu, neophodan je pojaiva. Ranije je korien spoljni pojaiva,
ali je taj metod odbaen zbog prisustva uma. Danas se pojaiva
postavlja unutar kuita davaa. Akcelerometri se na mainu ije
vibracije merimo montiraju ili posredstvom magnetne stope, ili
pomou navojnog para.
Karakteristika akcelerometra se daje u obliku 100 mV/g (g je
ubrzanje zemljine tee). Postoje i piezorezistivni davai. Oni
menjaju svoju otpornost u zavisnosti od sile koja na njih deluje.
Za razliku od piezoelektrinih, piezorezistivni mogu da mere
konstantna optereenja. SENZORI PROTOKA OPTIKI MERAI (Laser Doppler
Anemometry - LDA) Ova metoda merenja zahteva da cev kroz koju
prolazi fluid bude providna na mestu gde se protok meri. Takoe, u
samom fluidu moraju postojati estice prenika 0,2 - 0,4m. U tu svrhu
se najee u fluid dodaju so, crvena ljaka, titanijum dioksid... Na
fotodiodi se prikupljaju zraci odbijeni od estice. U zavisnosti od
frekvence rasprene svetlosti lasera izraunava se brzina estice
(smatra se da su estice dovoljno male, tako da je njihova brzina u
stvari brzina fluida). Velika prednost ove metode je to se samim
izvoenjem merenja ne utie na tok fluida. Greka pri merenju LDA
metodom je ispod 1%.
EMA RADA APARATURE (LASER DOPPLER ANEMOMETRY)
MERNO MESTO (PROVIDNA CEV) ULTRAZVUNI MERAI PROTOKA Ova metoda
se zasniva na tome da brzina zvuka kroz fluid zavisi od brzine
proticanja tog fluida.
Ultrazvuni signal se proizvodi pomou piezoelektrinih kristala
(napon se dovodi na polove kristala i to izaziva pulsiranje
kristala).Piezoelektrini kristal vibrira frekvencom od 50kHz do
kekoliko Mhz.
PRINCIP RADA ULTRAZVUNOG MERAA PROTOKA Sonde A i B su ujedno i
prijemnici i odailjai. Naizmenino jedan drugome alju ultrazvune
signale. Signal koji putuje niz tok strujanja fluida biva ubrzan,
dok signal koji putuje uz tok fluida biva usporen. Razlika izmeu
ovih brzina prostiranja ultrazvuka je proporcionalna brzini
strujanja fluida. Prednost ove metode je to nema potrebe da cev
bude providna, nije neophodno da se u tok fluida dodaju bilo kakve
estice. Merenje se moe vriti podjednako dobro i na metalnim i na
plastinim cevima.
REALAN IZGLED MERNOG UREAJA 12. Enkoder? ENKODER Senzor koji
koristimo kako bismo saznali: 1) Broj obrtaja vratila 2) Poziciju
vratila (u odnosu na stator) 3) Smer obrtanja vratila
Enkoder moe raditi na: 1) mnagnetno-otpornom principu 2)
magnetnom principu sa Hall-ovim davaem
3) optikom principu
PRINCIP RADA ENKODERA I OLIK SIGNALA KOJI DAJE
Disk se montira na vratilo. Ne sme biti pomeranja diska u odnosu
na vratilo. Postoje dve vrste optikih enkodera: 1) Relativni 2)
Apsolutni RELATIVNI OPTIKI ENKODER
Zove se relativni jer informaciju o poziciji vratila daje u
odnosu na reperni prorez na disku. Poseban par LED + Fototranzistor
je zaduen za reperni prorez. Kada on propusti svetlost sa diode
dobijamo informaciju da je vratilo napravilo pun obrtaj. Podatak o
ugaonoj brzini vratila dobija se primenom jednostavne matematike. U
sledeoj formuli t predstavlja vreme koje je proteklo izmeu dva
prolaza repernog proreza.
Ugaonu brzinu moemo meriti i ee, tj. i pre nego to vratilo
napravi pun krug. Ako merimo vreme prolaska izmeu bilo koja dva
proreza na glavnom krugu i brojimo koliko je proreza za to vreme
prolo. Te podatke koristimo u sledeim formulama.
POZICIJA VRATILA Jedan par LED + Fototranzistor prati reperni
prorez, dok drugi par prati proreze na glavnom krugu. Pozicija
vratila se dobija iz podataka koliko je proreza na glavnom krugu
prolo od poslednjeg prolaza repernog proreza.
SVE SE SVODI NA BROJANJE!!!! SMER ROTACIJE VRATILA Za odreivanje
smera rotacije je neophodno da na glavnom krugu proreza postoje dva
para LED + Fototranzistor. Njihov meusobni razmak mora biti
(Z+1/2)*b . Z - bilo koji ceo broj b - irina proreza
KAKO SE ODREUJE SMER OBRTANJA?
A i B su etvrtke koje se formiraju od signala koji stiu sa dva
optokaplera. To bi trebalo da budu dva identina signala, meusobno
smaknuta za jednu polovinu irine etvrtke. Razmotriemo dva sluaja.
Kada se disk obre u jednu i u drugu stranu. U B nizu se desi
promena sa 0 na 1. Tu promenu detektujemo softverski pomou programa
koji je na PLC-u . Ako je u tom trenutku niz A na vrednosti 0,
kreemo se od crvene linije na levo! Drugi sluaj. Detektujemo da se
u B nizu opet dogodila promena sa 0 na 1. Ako je u ovom sluaju niz
A sada na vrednosti 1, kreemo se od zelene linije na desno.
Analogijom razmotrite i dva sliaja kada se u nizu B desi promena sa
1 na 0!!! Rezolucija (broj proreza) enkodera ide i preko pet
miliona (5x106)!!! Razmislite o tome koliko je minimalno ugaono
pomeranje vratila koje ovakav enkoder moe detektovati.
APSOLUTNI OPTIKI ENKODER Zove se apsolutni jer daje apsolutnu
poziciju vratila, tj. nevezano za bilo kakav reper. Fiziki, disk
apsolutnog enkodera se razlikuje od diska relativnog.
Disk ima vie nivoa proreza. Svaki nivo ima svoj par LED +
Fototranzistor. Rezolucija enkodera zavisi od broja proreza na
najviem nivou. Svaka ugaona pozicija (16 ima na slici) ima svoju
binarnu ifru. Prorez proputa svetlost i tada ima signala tj. cifra
je 1. Ako LED + Fototranzistor stoji na zasunu rezultat je 0. Za
ovaj disk ifre pozicija su sledee
Krika Br. 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
23
22
21
20
0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1
0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1
0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1
0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
Kako se decimalni brojevi prevode u binarne? 1) Koliko pozicija
za binarni broj imamo na raspolaganju? Za X pozicija moemo ispisati
2X brojeva. Na etiri pozicije (X=4) moemo napisati 24=16
brojeva.
PREVOD IZ BINARNOG U DECIMALAN BROJ Apsolutni enkoder odmah po
ukljuivanju zna na kojooj se poziciji nalazi. On odmah oitava kod
sa LED + Fototranzistor, i daje informaciju u kojoj kriki se
nalazi. To relativni enkoder ne moe da uradi (sve dok prvi put ne
proe reperni prorez ne zna se u kojoj je poziciji disk). ODREIVANJE
SMERA OBRTANJA KOD APSOLUTNOG ENKODERA Ako binarni brojevi idu u
rastuem nizu vratilo (i disk sa njime) se okree u jednom smeru. Ako
se brojevi smenjuju u opadajuem nizu u pitanju je rotacija vratila
u suprotnom smeru. ODRIVANJE UGAONE BRZINE VRATILA Isti princip kao
i kod relativnog enkodera. Najee se koristi nivo sa najveim brojem
proreza, jer to omoguava najvei broj merenja u toku jednog obrtaja
vratila. Ogranienje u odnosu na relativni enkoder je to to kod
relativnog za poveanje rezolucije treba samo obezbediti disk sa
veim brojem proreza, dok kod apsolutnog uz vei broj proreza moramo
obezbediti i vei broj parova LED+ Fototranzistor. 13.
Aktuatori?
ELEKTROMOTORI To su ureaju koji pretvaraju elektrinu energiju u
obrtni moment na izlaznom vratilu. NAIZMENINA STRUJA 1) Sinhroni 2)
Asinhroni JEDNOSMERNA STRUJA 1) DC motori 2) Step (korani)
motori
SINHRONI ELEKTROMOTORI Glavna karakteristika ove vrste
elektromotora je da se rotor vrti istom brzinom kao i obrtno
magnetno polje statora. STATOR Oblika je upljeg valjka, sa
ljebovima u kojima se nalaze trofazni namotaji. ROTOR Sastoji se od
namotaja provodnika dok kod manjih motora moe biti formiran od
permanentnih magneta. Ukoliko su namotaji u pitanju, oni se
napajaju jednosmernom strujom preko kliznih prstenova. Tako se u
namotajima indukuje elektromagnetno polje. PRINCIP RADA Indukovano
magnetno polje rotora prati obrtno magnetno polje statora i na taj
nain dolazi do rotacije izlaznog vratila. Ukoliko optereenje motora
poraste preko odreenje granice magnetno polje statora nee moi da
prati obrtno magnetno polje statora i motor e stati. STARTOVANJE
MOTORA Odmah po dovoenju napajanja na stator obrtno magnetno polje
poinje da rotira sinhronom brzinom.
f - frekvenca struje [Hz] p - broj pari polova Usled inercije
rotora NE dolazi do njegovog pokretanja i praenja obrtnog magnetnog
polja. Trebalo bi zaleteti rotor do brzine bliske sinhronoj brzini,
pustiti napajanje jednosmernom strujom i indukovano magnetno polje
rotora e se sinhronizovati sa obrtnim magnetnim poljem statora. Tri
mogua naina startovanja: 1) Poseban motor za zaletanje rotora
2) Postepeno zaletanje motora korekcijom frekvence naizmenine
struje 3) Startovanje motora kao asinhronog do brzine bliske
sinhronoj PREDNOSTI SINHRONOG MOTORA 1) Nezavisnost brzine obrtanja
od promene optereenja 2) Mogunost podeavanja faktora snage cos,
promenom pobudne struje 3) Mogunost popravke snage nekog drugog
potroaa MANE SINHRONOG MOTORA 1) Rotor se mora obrtati sinhronom
brzinom (samo tada M0) 2) Napajanje namotaja na rotoru jednosmernom
strujom je loe reenje jer dolazi do varnienja izmeu etkica i
prstenova (i do njihovog troenja) 3) Cena je vea nego kod
asinhronog motora ASINHRONI ELEKTROMOTORI STATOR je isti kao kod
sinhronog elektromotora. Napaja se trofaznom naizmeninom strujom.
ROTOR se sastoji od metalnih ipki koje su na krajevima kratko
spojene metalnim ipkama. Taj oblik podsea na kavez, pa se popularno
zove veveriji kavez.
Za razliku od sinhronog motora rotor asinhronog nema napajanje.
U njemu se beskontaktno indukuje struja pod uticajem
elektromagnetnog polja statora. Ta indukovana struja stvara
sopstveno elektromagnetno polje koje u interakciji sa obrtnim
elektromagnetnim poljem statora izaziva obrtanje vratila
elektromotora. Kanjenje rotora za obrtnim elektromagnetnim poljem
statora se zove klizanje rotora. Najee klizanje rotora iznosi
2-10%!!!! DC MOTOR (DIRECT CURRENT MOTOR) DC motori se dele u dve
grupe: 1) DC motori sa etkicama (Brushed DC motor)
2) DC motori bez etkica (Brushless DC motor - BLDC motor)
DC MOTOR SA ETKICAMA Stator se sastoji od dva permanentna
magneta. Rotor je napravljen od namotaja ice. U najjednostavnijoj
varijanti rotor je sastavljen od dva pola (dva namotaja), dok
naprednije verzije imaju tri i vie polova . Vei broj polova
omoguava da motor startuje bez obzira na meusobni poloaj rotora i
statora. Takoe, distribucija obrtnog momenta je bolje rasporeena
kod verzija sa vie pari polova.
Princip rada Napajanje se dovede na polove (+ i -). Oko namotaja
se formira magnetno polje. Na prvoj slici su namotaji suprotno
namagnetisani od permanentnih magneta uz koje se nalaze. Zbog toga
dolazi do odbijanja meu njima i vratilo poinje da rotira. Na drugoj
slici rotor nastavlja da rotira. Na treoj slici je prikazan
trenutak pre nego to e rotor doi u takav poloaj da e namotaji biti
privueni od strane permanentnih magneta (razliito su
namagnetisani). To bi uzrokovalo zaustavljanje rotora. Kako bi se
rotacija nastavila, neophodno je da se smer struje kroz namotaje
promeni, tj. da se opet namagnetiu razliito od permanentnih magneta
uz koje su se nali. Smer struje se menja uz pomo komutatora. Kada
se smer jednosmerne struje promeni opet dolazimo u situaciju
prikazanu na prvoj slici. Proces se ponavlja sve dok ima napajanja
na polovima. Animaciju koja detaljno objanjava princip rada moete
pogledati na http://www.youtube.com/watch?v=RAc1RYilugI . DC MOTOR
BEZ ETKICA esto ovu vrstu motora sreemo i pod nazivom Electronicaly
Commutated motors (nemaju mehaniki komutator, ve elektronsku
kontrolu). Prednost u odnosu na motore sa etkicama je to to ovde ne
postoji troenje etkica i prstenova komutatora, nema varnienja, na
raspolaganju je vei obrtni moment i vea pouzdanost . Uz to je i
efikasnost motora bolja. Mana je to to je kontrolna elektronika
skupa. BLDC motor ima rotor sastavljen od permanentnih magneta i
stator sa namotajima. Na taj nain je izbegnuto da se struja dovodi
na rotor koji je u pokretu. Uz to, namotaji statora su naslonjeni
na kuite, preko koga se efikasno hlade. S toga nije neophodno da
kroz motor postoji strujanje vazduha radi hlaenja. Motor moe biti
potpuno zatvoren i na taj nain zatien od prljavtine i stranih
materija. Maksimalna snaga, kojom se motor moe opteretiti, je
ograniena toplotom koja se stvara tokom rada motora. Poviena
temperatura u kuitu moe umanjiti magnetinost permanentnih magneta.
Usled toga se smanjuje i efikasnost motora.
U reimima niskih i srednjih optereenja BLDC motor je efikasniji
od motora sa etkicama. to je vee optereenje motora, razlika u
efikasnosti izmeu BLDC i motora sa etkicama je manja.
KORANI MOTORI (STEP MOTORS) To je vrsta DC motora koja punu
rotaciju vratila izvodi kroz niz diskretnih pozicija (koraka), u
kojima po potrebi mogu i stati. Stator se sastoji od velikog broja
elektromagneta. Rotor je od gvoa u obliku zupanika. Kada se upali
prvi elektromagnet, on privue i naspram sebe pozicionira zupce
rotora. U toj poziciji zupci su malo pomereni u odnosu na sledei
par elektromagneta. Kada se prekine napajanje prvom i dovede
napajanje drugom paru elektromagneta zupci se pomeraju u poziciju
naspram drugog para elektromagneta. Kroz seriju takvih pomeranja,
izazvanih radom mikrokontrolera, vratilo e napraviti pun krug.
Preciznost koraka zavisi od konstrukcije koranog motora. S obzirom
na to da rotor skae iz jedne u drugu poziciju nivo vibracija kod
koranog motora je vii nego kod ostalih DC motora. Kontrola rada
koranih motora moe se izvoditi u: 1) Otvorenoj petlji 2) Zatvorenoj
petlji Kontrola u otvorenoj petlji se primenjuje mnogo ee. Pod ovim
nainom kontrole se podrazumeva da mikrokontroler ne zna u kojoj su
meusobnoj poziciji rotor i stator. Iz tog razloga je neophodno da
ovi motori budu veoma precizno projektovani. Najvei izazov za ove
motore je rad pod velikim optereenjem. Tada postoji velika
verovatnoa da motor izgubi korak, tj. da se napajanje dovede na par
polova iji odgovarajui zupci rotora nisu u predvienoj poziciji.
Tada motor ulazi u reim oscilovanja ili traenja(hunting). Kontrola
u otvorenoj petlji podrazumeva prisustvo enkodera. Enkoder
obezbeuje mikrokontroleru povratnu informaciju o trenutnoj poziciji
rotora u odnosu na stator. Na taj nain, mikrokontroler je u
mogunosti da u svakom trenutku pusti napajanje odgovarajuem paru
polova (elektromagnetu).
INVERTOR (FREKVENTNI REGULATOR)
Invertor je elektronski ureaj koji pretvara jednosmernu struju
(DC) u naizmeninu struju (AC).
NAJJEDNOSTAVNIJI INVERTOR U ulaznom kolu se jednosmerna struja,
dejstvom prekidaa, naizmenino proputa kroz jedan pa kroz drugi deo
kola. Na taj nain se stvara promenljivo magnetno polje, koje u
izlaznom delu kola indukuje naizmeninu struju. Izlazna, naizmenina,
struja moe biti bilo koje frekvence i bilo kog napona.
ULAZNA STRUJA I KOMPONENTE IZLAZNE STRUJE Sirov izlazni signal
je krzav jer u sebi sadri i vie harmonike (3xf0, 5xf0, 7xf0). Za
pogon AC motora je neophodan gotovo idealan sinusni signal. Zbog
toga se izlazni signal iz invertora mora filtrirati.
Najee se primenjuju za upravljenje ugaonom brzinom trofaznih
motora. Postoje dve vrste invertora: 1) Invertori bez meukola
(direktni invertori) 2) Invertori sa (naponskim ili strujnim)
meukolom PNEUMATSKI CILINDRI
Pneumatski cilindar je mehaniki ureaj koji za vrenje rada
koristi energiju gasa pod pritiskom (najee vazduh). Princip rada se
jednostavno objanjava formulom
Rad pneumatskog cilindra prikazan je kroz sledee tri slike. Na
prvoj je klip u stanju mirovanja. Na drugoj slici je prikazana
situacija u kojoj se vazduh pod pritiskom dovodi u cilindar. Klip
se pod dejstvom pritiska pomera u desno, a opruga se sabija. Na
treoj slici se pritisak u cilindru smanjuje, a klip se pod dejstvom
sile u opruzi pomera na levo.
RAD PNEUMATSKOG CILINDRA Pneumatski cilindar moe biti i
dvostrukog dejstva. Poloaj klipa je odreen odnosom pritiska vazduha
sa leve i desne strane klipa. Kod ovakvog pneumatskog cilindra nema
potrebe za oprugom.
PNEUMATSKI CILINDAR DVOSTRUKOG DEJSTVA Na prvoj slici je klip u
nekom proizvoljnom poloaju. Na drugoj slici je prikazano dovoenje
vazduha pod pritiskom preko ventila A, zbog toga se klip pomera u
desno. Na treoj slici se vazduh pod pritiskom dovodi preko ventila
B, tako da se klip pomera u levo. Treba primetiti da je aktivna
povrina sa desne strane klipa manja zbog postojanja klipnjae. To
znai da je neophodan vei pritisak vazduha dovedenog preko ventila B
kako bi klip bio u ravnotei. Prednosti pneumatskog cilindra: 1)
Medijum (vazduh) je uvek na raspolaganju 2) Vazduh se lako skladiti
i transportuje (cevima) 3) Vazduh nije zapaljiva materija 4) Vazduh
ne zagauje okolinu (nisu potrebni povratni vodovi u rezervoar) Mane
pneumatskog cilindra: 1) Relativno male sile na klipnjai 2)
Problemi usled stiljivosti vazduha (male brzine, oteano precizno
pozicioniranje) HIDRAULIKI CILINDRI Princip rada je identian kao
kod pneumatskog cilindra. Konstrukciono, hidrauliki cilindri moraju
biti robusniji zbog veih pritisaka i sila. Ulje je medijum koji
zagauje okolinu. Zaptivanje mora biti dobro, a neophodni su i
povratni vodovi za transport ulja iz cilindra nazad u rezervoar.
Prednosti hidraulikog cilindra: 1) Mogue je postoi velike sile
(preko 2MN) 2) Postiu se velike brzine klipa 3) Omogueno je
precizno pozicioniranje klipa Nedostaci hidraulikog cilindra: 1)
Neophodno je generisati hidrauliku energiju (poveanje pritiska
ulja) 2) Neophodni su povratni vodovi za ulje
3) Visoka cena 4) Zapaljivost ulja i njegovo tetno dejstvo na
okolinu
HIDRAULIKI CILINDAR