-
PLANIFICACION DE TRAYECTORIAS CON
EL ALGORITMO RRT. APLICACION A
ROBOTS NO HOLONOMOS
D. Lopez F. Gomez-Bravo F. Cuesta
A. Ollero
Grupo de Robotica, Vision y Control. Univ. de Sevilla.Camino de
los Descubrimientos, 41092 Sevilla (Spain).
{fede,aollero}@cartuja.us.es
Escuela Politecnica Superior, Universidad de Huelva.Carretera de
Palos-La Rabida s/n. 21071
Huelva.{diego.lopez,fernando.gomez}@diesia.uhu.es
Resumen: Dentro de los metodos de planificacion de trayectorias,
las tecnicasbasadas en el algoritmo RRT (Rapidly Exploring Random
Trees) estan deparandoespecial interes. En este artculo se
describen los fundamentos de este novedosoalgoritmo. Asimismo, se
detallan las versiones mas significativas aportadas por
labibliografa mas reciente. Se ilustra tambien su aplicacion en
sistemas roboticos noholonomos. Finalmente se presenta una tecnica
basada en el concepto de maniobrarestringida y su aplicacion tanto
a vehculos con guiado diferencial como conconfiguracion Ackerman.
Copyright c2006 CEA-IFAC
Palabras Clave: Planificacion de caminos, robots moviles,
sistemas no holonomos,metodos aleatorios.
1. INTRODUCCION
De forma generica, el problema de planificacion demovimientos
consiste en llevar un cuerpo, desdeuna configuracion inicial hasta
otra final dentrodel espacio de configuraciones libres de
colision.Este problema ha sido ampliamente abordadoen la literatura
(Latombe, 1991; Laumont et al.,1994; Munoz, 1995), existiendo un
gran numero demetodos efectivos para resolver el problema de
laplanificacion en tiempo real, tales como campospotenciales,
grafos de visibilidad, diagramas deVoronoi, etc. No obstante,
cuanto mas complejoes el entorno, mayor el numero de grados
delibertad, o mas restricciones cinematicas presentael robot,
mayores son tambien las limitaciones de
los metodos y el tiempo necesario para encontrarla solucion.
Por ejemplo, un conocido metodo de planificaciones el de campo
de potenciales, el cual tambienes utilizado en aplicaciones de
control reactivo.Este metodo, pese a ser rapido, presenta el
pro-blema de la existencia de mnimos locales. Parasolucionar esta
limitacion se recurre a algorit-mos de generacion aleatoria que
permiten realizarplanificaciones locales hacia un nuevo
mnimo(Latombe, 1991).
Esta situacion ha impulsado la busqueda demetodos de
planificacion puramente aleatoria conobjeto de lograr mayor
velocidad en la obten-cion del resultado. Entre los mas
extendidosse encuentra el denominado Rapidly Exploring
JLDIEZPlaced Image
JLDIEZISSN: 1697-7912. Vol. 3, Nm. 3, Julio 2006, pp. 56-67
-
Random Trees(LaValle, 1998), abreviadamenteRRT. Sobre este han
aparecido diferentes ver-siones que intentan mejorarlo, obteniendo
efi-cientes avances computacionales, como el RRT-Ext-Con(Kuffner y
LaValle, 2000; LaValle yKuffner, 2001), o aportando mejoras para su
apli-cacion en escenarios especficos, como es el casodel ERRT
(Bruce y Veloso, 2002). Este ultimoresulta especialmente indicado
en escenarios en loscuales los obstaculos den lugar a zonas
conectadasa traves de pasillos estrechos.
Este artculo introduce el algoritmo RRT. Deeste modo, se
detallan las principales implementa-ciones y variantes de dicho
metodo. Asimismo seilustra su aplicacion en vehculos no
holonomospara facilitar la comprension del metodo. En con-creto, el
metodo propuesto se aplica al caso de unrobot movil de conduccion
diferencial, si bien, elprocedimiento es extensible con facilidad a
robotsde cinematica mas compleja.
El artculo esta organizado como sigue: en primerlugar se
introducen los metodos de planificacioncon generacion aleatoria. En
la seccion 3 se detallael algoritmo RRT y diversas variantes del
mismo.La seccion 4 esta dedicada a ilustrar un metodode
postprocesado de la solucion. En el apartado 5se presenta la
aplicacion del metodo a sistemas noholonomos. Asimismo, se propone
una alternativaa los metodos existentes basada en el conceptode
maniobra restringida, incluyendo resultados ycomparativas. El
artculo finaliza con las conclu-siones y las referencias.
2. PLANIFICACION CON GENERACIONALEATORIA
Gracias al desarrollo del metodo de campos poten-ciales surgio
una primera aproximacion a los meto-dos de planificacion aleatoria
(Latombe, 1991). Eneste tipo de metodos, se parte de un
escenariodonde el espacio de configuraciones se encuentradividido
en porciones discretas estableciendo unarejilla regular. A cada
casilla se le concede unvalor de potencial dependiendo de su
proximidada un obstaculo o la cercana a los puntos origeno destino.
El planificador genera una trayectoriamerced a un vector gradiente
derivado del campopotencial. Esta tecnica permite que el sistema
sigasiempre la direccion que minimiza el valor delcampo potencial.
El objetivo es alcanzar el mni-mo absoluto que estara situado en la
configuraciondestino. Sin embargo, el campo resultante puedetener
una serie de mnimos locales, superioressiempre al mnimo absoluto.
El problema aparececuando el sistema alcanza un mnimo local. Eneste
caso, el potencial no es nulo, pero el gradientemantiene al sistema
en la configuracion alcanzada.
Para resolver este inconveniente se recurre a unmetodo de
generacion aleatoria. Se planificanmovimientos aleatorios que
permitan que el sis-tema abandone el mnimo y, a continuacion,
seaplica de nuevo el metodo del gradiente. Esteproceso continuara
hasta hallar un nuevo mnimo(Latombe, 1991).
El modo de generar caminos consista en crearuna sucesion de
desplazamientos aleatorios. Enestos, cada coordenada poda
experimentar unincremento positivo o negativo de una
longitudconstante dada. Seguidamente, se comprobaba laexistencia o
no de colision y en funcion de ello seagregaban al camino. Este
proceso se repeta unnumero de iteraciones determinado y, a partir
delultimo punto, se volva al algoritmo de campo depotencial
original.
El camino generado deba ser lo suficientementelargo como para
abandonar cualquier mnimo lo-cal. No obstante es deseable que dicho
camino nosea excesivamente largo, para evitar costes
com-putacionales innecesarios. Por tanto, el metodoutilizado
determinaba tambien un tamano aleato-rio para la longitud del
camino de salida. Deeste modo se mantena la capacidad de escape
decualquier mnimo, al tiempo que se proporcionabamayor probabilidad
a las longitudes menores. Es-tos metodos utilizan una distribucion
de Laplace,por ser de maxima entropa para la seleccionaleatoria de
las magnitudes (Latombe, 1991).
El exito de los metodos aleatorios sugirio la posi-bilidad de
usar dichas tecnicas de forma exclusi-va, eliminando el coste del
procesamiento para elcalculo del potencial. Haban de ser mas
simples,para competir en velocidad y suplir la carencia deuna
inteligencia en la busqueda de caminos. Unode estos metodos es el
llamado Rapidly ExploringRandom Trees, RRT (LaValle, 1998).
El RRT no precisa el establecimiento de un campode potencial,
con el consecuente ahorro del proce-samiento. Al mismo tiempo, el
RRT asegura unaexploracion equiprobable de todo el espacio
deconfiguraciones. Por ultimo, es sencillo, rapido yde facil
extension a escenarios complejos.
3. RAPIDLY EXPLORING RANDOM TREES(RRT)
El RRT original pronto dio lugar a varias versionesmas
sofisticadas y de diferente comportamientosegun el entorno. En esta
seccion se describira,en primer lugar, el algoritmo original y,
poste-riormente, se presentaran distintas modificacionesefectuadas
sobre el mismo.
MarinaText BoxD. Lpez, F. Gmez-Bravo, F. Cuesta, A. Ollero
JLDIEZLine
MarinaText Box57
-
3.1 Algoritmo RRT
El algoritmo RRT original se basa en la construc-cion de un
arbol de configuraciones que crece bus-cando a partir de un punto
origen. Para entenderel algoritmo se usaran los siguientes
conceptos:
C es el conjunto de todas las configuracionesposibles del robot
en un espacio dado.Cfree es el subconjunto de C de las
confi-guraciones que no intersectan ninguno de losobstaculos
existentes en dicho espacio.R metrica definida dentro de C. Puede
serdistancia eucldea u otra ponderacion deproximidad que pueda
interesar.qini es la configuracion inicial (en el casode un robot
que se mueve en un plano, lascoordenadas x e y de un punto de
referenciay la orientacion del vehculo respecto a unode los ejes
del sistema de referencia).qfin es la configuracion que se desea
alcanzar.qrand es una configuracion aleatoria que ge-nera el
algoritmo.qnear es la configuracion mas proxima aqrand, en el
sentido definido por R, de entrelas existentes en un arbol.qnew es
la configuracion que se va a anadir alarbol. es la longitud del
segmento de crecimiento.En realidad, es la distancia entre un punto
delarbol y el siguiente con el que esta conectado.
El objetivo original del metodo RRT consista enconstruir un
arbol de exploracion que cubrierauniformemente todo el espacio
libre de colision.Para ello, se desarrollo el algoritmo que se
muestraen la figura 1 (LaValle, 1998). Dicho algoritmotiene como
mision seleccionar un punto (qrand)de forma aleatoria y extender
hacia el el arbol deconfiguraciones. Observese como se hace uso de
lafuncion Extiende. Dicha funcion tiene el cometidode ampliar el
arbol en el sentido que marca qranddeterminando si existe un camino
libre de colision.El esquema de dicha funcion se presenta en
lafigura 2.
RRT (qini){
Arbol[0] = qini;Para k = 1 hasta Kmax{
qrand = ConfiguracionAleatoria();Extiende(Arbol, qrand);
}Devuelve Arbol;
}
Figura 1. Algoritmo RRT
El algoritmo comienza inicializando la tabla aso-ciada al arbol
con la configuracion origen. Seguida-mente, se entra en un bucle,
limitado por un valorKmax, cuya funcion es finalizar el algoritmo
unavez se ha realizado un numero prefijado de itera-
Funcion Extiende(Arbol, qrand){
qnear= VecinoMasProximo(qrand, Arbol);Si (
NuevaConfiguracion(qrand, qnear, qnew) ){
A~nadeVertice(Arbol, qnew);Si ( qnew=qrand ){
Devuelve alcanzado ;}Si no{
Devuelve avanzado ;}
}Si no{
Devuelve rechazado ;}
Figura 2. Funcion Extiende
ciones. Este valor, se utilizara posteriormente paraparar el
algoritmo en el caso en que no se alcancela configuracion final. Es
importante resaltar quela determinacion de dicho valor dependera de
lascaractersticas del problema (numero de obstacu-los, tiempo lmite
del algoritmo, etc...).
Dentro del bucle del algoritmo RRT hay dosinstrucciones. Con la
primera se obtiene un puntoal azar dentro del espacio libre de
colision (Cfree);la segunda hace crecer el arbol en direccion a
laconfiguracion aleatoria anteriormente obtenida.
Figura 3. Crecimiento del arbol
El crecimiento del arbol se consigue con la fun-cion Extiende.
La estructura de dicha funcioncomienza con el calculo de qnear.
Esto se reali-za gracias a la funcion VecinoMasProximo queaplica la
metrica R definida anteriormente a to-dos los vertices del arbol,
obteniendo el puntomas cercano a qrand. Seguidamente, la
funcionNuevaConfiguracion calcula qnew, el nuevo pun-to a agregar,
mediante un salto de tamano par-tiendo de qnear en direccion hacia
qrand (ver figura3). Para la obtencion de qnew se tiene en cuentasi
hay alguna colision en dicho desplazamiento,devolviendo verdadero o
falso segun sea unmovimiento posible o, por el contrario,
colisionecon algun obstaculo.
Si no se ha detectado colision, se agrega el nuevopunto al arbol
distinguiendo entre dos casos. Si elpunto aleatorio se encuentra
dentro de un crculode centro qnear y radio , entonces se considera
quese ha alcanzado qrand y, por tanto, dicho punto hasido
alcanzado. El algoritmo notificara entoncestal circunstancia. Si
por el contrario (caso mas
MarinaText BoxPlanificacin de Trayectorias con el Algoritmo RRT.
Aplicacin a Robots No Holnomos
MarinaText Box58
JLDIEZLine
-
usual), no se ha producido el alcance, entoncesdevolvera el
valor avanzado. Por ultimo, en casode que la funcion
NuevaConfiguracion haya ad-vertido de la existencia de algun
obstaculo en elcamino de qnear a qnew, se informa de que no
hahabido nuevas ramas y el punto no es agregado alarbol.
El comportamiento de este algoritmo con respectoa otros es mejor
en cuanto a la homogeneidad delespacio explorado.
La naturaleza del RRT le hace avanzar con masavidez en aquellas
zonas donde haya un mayor es-pacio libre, pues es all donde hay mas
posibilidadde encontrar puntos qrand factibles. Esto
puedecomprenderse observando el crecimiento del arbolen distintos
entornos. Observese, por ejemplo, laprogresion del algoritmo
representado a traves delas figuras 4, 5, 6 y 7. En este caso, el
espaciolibre consiste en un crculo. Esto significa, quedesde el
punto central, no hay ninguna preferenciaen cuanto a la direccion
de crecimiento. Efecti-vamente, puede verse que las ramas iniciales
delarbol surgen en direcciones aleatorias y crecen sinpredominio
entre ellas. Otro hecho a observar es lainexistencia de una alta
densidad de ramas en elorigen. La naturaleza del RRT evita
precisamenteesto. Es mas, se puede contemplar que el arboltiende a
lograr una densidad uniforme de ramassobre el espacio libre.
Figura 4. RRT tras 100 iteraciones.
Observese ahora la figura 8. En esta ocasion serepresenta la
progresion del algoritmo RRT sobreun espacio diferente. Se observa
que, desde el pun-to origen, situado dentro del rectangulo
pequeno,parte una rama que crece con acusada prepon-derancia con
respecto a las demas. La causa es laalta frecuencia con que
aparecen puntos aleatoriossobre el rectangulo de la derecha debido
a que quepresenta mayor area libre de obstaculos.
Figura 5. RRT tras 300 iteraciones.
Figura 6. RRT tras 400 iteraciones.
Figura 7. RRT tras 800 iteraciones.
MarinaText BoxD. Lpez, F. Gmez-Bravo, F. Cuesta, A. Ollero
JLDIEZLine
MarinaText Box59
-
Figura 8. Evolucion en entorno asimetrico.
Otro detalle relevante consiste en el crecimientode ramas
principales hacia las esquinas de losrectangulos. Si se compara con
el crculo, uncuadrado presenta mas puntos desde su centro
acualquiera de sus vertices que en otras direcciones.Esto
significa, igualmente, una mayor densidadde puntos aleatorios en
dichas direcciones y, portanto, una predominancia de
crecimiento.
Al igual que en el caso anterior, tras las
suficientesiteraciones, puede observarse que la densidad deramas
resulta razonablemente homogenea a pesardel desequilibrio inicial
existente entre los dosrectangulos.
Por ultimo, se advierte que este algoritmo solo seocupa de
generar un arbol capaz de explorar de
modo equiprobable el espacio libre. Por tanto, noes el metodo
mas adecuado para hallar el caminoentre dos puntos. En las
siguientes secciones sedetallan algunas extensiones y mejoras del
RRTque permiten establecer un camino entre configu-racion origen y
destino.
3.2 Algoritmo RRT-Bidireccional basico
La adaptacion del algoritmo RRT para conseguirconectar una
configuracion inicial con una final selogra sustituyendo el
algoritmo original RRT porel algoritmo RRT-Bidireccional basico
mostradoen la figura 9.
RRT-Bidireccional basico(qini, qfin){
ArbolA[0]= qini;ArbolB[0]= qfin;Para k = 1 hasta Kmax{
qrand= ConfiguracionAleatoria( );Si (Extiende(ArbolA,
qrand)6=rechazado ){
Si (Extiende(ArbolB, qrand)=alcanzado YExtiende(ArbolA,
qrand)=alcanzado )
{Devuelve Camino(ArbolA, ArbolB);
}}Intercambiar(ArbolA, ArbolB)
}Devuelve Error
}
Figura 9. Algoritmo RRT-Bidireccional basico
Este algoritmo se basa en la construccion de dosarboles que
parten de los puntos origen y destinosimultaneamente. El algoritmo
concluye en cuantodichos arboles conectan. Es decir, cuando la
fun-cion Extiende devuelve alcanzado para el segundoarbol. Si
alcanzado el valor de Kmax ambos arbolesno han coincidido, se
devuelve un mensaje deerror.
Es importante destacar que ambos arboles com-parten el mismo
punto qrand para crecer. Es-to se hace para ahorrar coste
computacional sinmenoscabar las propiedades de los RRT. Debido
aello, sendos arboles tenderan a explorar el espaciovaco,
aumentando con el tiempo la probabilidadde conexion.
Observese el uso de la funcion Intercambiar, queintercambia el
orden de los arboles de maneraque el crecimiento de ambos sea
equilibrado. Siesta funcion no existiera, el ArbolB solo
creceracuando la extension del ArbolA no presentaracolision.
Este algoritmo admite ciertas mejoras. Por unaparte, presenta
una condicion muy restrictiva yaque exige que en una misma
iteracion coincidanambos arboles en un mismo punto. Para relajar
es-ta restriccion se ha desarrollado el algoritmo RRT-Ext-Con
(Kuffner y LaValle, 2000). Por otra, el
MarinaText BoxPlanificacin de Trayectorias con el Algoritmo RRT.
Aplicacin a Robots No Holnomos
JLDIEZLine
MarinaText Box60
-
crecimiento de los arboles puede ser dirigido deforma que
tiendan el uno hacia el otro, en lugar decrecer por zonas donde la
interconexion es difcil.Para conseguir esto se ha desarrollado el
algoritmoRRT-Ext-Ext (LaValle y Kuffner, 2001). Seguida-mente se
presentan ambos metodos.
3.3 RRT-Ext-Ext
Una mejora que permite agilizar la conexion entrelos arboles en
el anterior algoritmo se logra en elRRT-Ext-Ext. Con una muy
pequena variacion,es posible atribuirle una capacidad para que
ca-da arbol pueda dirigir su crecimiento hacia suhomologo. Esto lo
hace mas competitivo frente aotros algoritmos puramente
aleatorios.
RRT-Ext-Ext (qini, qfin){
ArbolA[0]= qini;ArbolB[0]= qfin;Para k = 1 hasta Kmax{
qrand= ConfiguracionAleatoria( );Si (Extiende(ArbolA, qrand)
6=rechazado ){
Si (Extiende(ArbolB, qnew)=alcanzado ){
Devuelve Camino(ArbolA, ArbolB);}
}Intercambiar(ArbolA,ArbolB);
}Devuelve Error;
}
Figura 10. Algoritmo RRT-Ext-Ext.
Este sutil cambio con respecto al algoritmo an-terior (figura 9)
es posible observarlo en la figura10, donde el punto qrand se
sustituye en el segundoarbol por qnew, es decir, el punto recien
agregadoal arbol precedente. Finalizada la iteracion, lafuncion
Intercambiar se ocupa de que la proximavez, sea el ultimo arbol el
que crezca hacia qrandy el primero hacia qnew. As pues, las
accionesresultantes de dos iteraciones consecutivas seran:
1. ArbolA crece hacia qrand (1a iteracion).
2. ArbolB crece hacia qnew de ArbolA.3. ArbolB crece hacia qrand
(2
a iteracion).4. ArbolA crece hacia qnew de ArbolB.
De esta forma cada arbol invierte la mitad desu tiempo en
explorar el espacio libre, y la otramitad, en buscar a su
companero.
3.4 Algoritmo RRT-Ext-Con
En este algoritmo (figura 11) se sustituye la fun-cion Extiende,
que agregaba un nuevo segmentoal arbol, por otra denominada Conecta
(ver figura12), mas ambiciosa, que va agregando
segmentosconsecutivos hasta alcanzar la configuracion obje-tivo o
un obstaculo (Kuffner y LaValle, 2000).
RRT-Ext-Con (qini, qfin){
ArbolA[0]= qini;ArbolB[0]= qfin;Para k = 1 hasta Kmax{
qrand= ConfiguracionAleatoria( );Si (Extiende(ArbolA,
qrand)6=rechazado ){
Si (Conecta(ArbolB, qnew)=alcanzado ){
Devuelve Camino(ArbolA, ArbolB);}
}Intercambiar(ArbolA,ArbolB);
}Devuelve Error;
}
Figura 11. Algoritmo RRT-Ext-Con.
Funcion Conecta(Arbol, q){
Repetir{
S=Extiende(Arbol, q);} Mientras (S=avanzado );Devuelve S;
}
Figura 12. Funcion Conecta
Se atenua as el problema de la excesiva restric-tividad del
algoritmo Bidireccional basico. Ahora,los segmentos agregados
pueden ser multiples, conlo que para conectar basta con que exista
solo uncamino rectilneo libre entre el punto qnew y elvertice mas
proximo del otro arbol.
La unica desventaja consiste en el mayor costecomputacional de
la funcion Conecta, que secompensa en muchos escenarios con la
mayoreficiencia del algoritmo.
Este algoritmo presenta una gran eficacia cuan-do se trata de
planificar trayectorias para sis-temas holonomos. Por el contrario,
como se ilustraen (Cheng y LaValle, 2001), el algoritmo RRT-Ext-Ext
representa la mejor opcion cuando setrata de planificar
trayectorias para sistemas noholonomos.
4. POSTPROCESADO
Los arboles obtenidos en la aplicacion de los dis-tintos
algoritmos RRT pueden resultar comple-jos para ser recorridos.
Normalmente, los arbolesson susceptibles de simplificacion (por
ejemplo,en algunos casos los extremos de ambos arbolespodran unirse
con una simple lnea recta).
Por consiguiente, en las aplicaciones practicas delmetodo RRT
resulta conveniente aplicar a losarboles obtenidos un postprocesado
que permitareducir su irregular topologa. En este sentido, aligual
que ocurre en otras tecnicas de planificacion,se suelen aplicar
algoritmos de simplificacion, muyrapidos y sencillos, que parten de
la informacion
MarinaText BoxD. Lpez, F. Gmez-Bravo, F. Cuesta, A. Ollero
JLDIEZLine
MarinaText Box61
-
suministrada por el planificador y generan, deforma iterativa,
un camino mas simple. Dichosalgoritmos suelen tener un coste
computacionalbajo.
Notese, que el algoritmo de postprocesado de-bera ser disenado
en funcion de la aplicacion con-creta, constituyendo un elemento
mas del sistemade planificacion.
As, por ejemplo, para el caso de planificacion deuna trayectoria
del objeto de planta rectangularmostrado en la figura 14, se ha
utilizado la funcionque se muestra en la figura 13, inspirada enun
algoritmo de postprocesado introducido en(Laumont et al.,
1994).
Funcion Postprocesado(CaminoOriginal){
fin = 0;Mientras ( no fin ){
colision = 1;i=NumeroDeVertices;Mientras ( colision ){
Si ( CuerdaValida(1, i) ){
EliminaArco(1,i,CaminoOriginal,CaminoFinal);colision=0;
}Si no{
i=i/2;}Si ( i 2 ){
EliminaArco(1,2,CaminoOriginal,CaminoFinal);colision=0;
}}Si ( NumeroDeVertices 2 ){
fin=1;}
}Devuelve(CaminoFinal);
}
Figura 13. Funcion Postprocesado.
Este algoritmo permite obtener un camino finalsimplificado a
partir del arbol original suministra-do por el RRT. La idea del
algoritmo consisteen eliminar aquellos tramos del arbol que
puedanser sustituidos por una trayectoria recta libre
decolision.
Como se puede ver, NumeroDeVertices es unafuncion que devuelve
el numero de vertices quecomponen el camino original e i representa
elnumero de vertices que se pretende sustituir. Enun principio, el
algoritmo prueba a sustituir todoel camino original por una
trayectoria recta. Siesto no es posible, i va adquiriendo un valor
cadavez menor (tpicamente se escoge el punto mediodel tramo de
camino con el que se prueba).
En cada iteracion, la funcion CuerdaValida(1,j) establece una
ruta recta entre el vertice 1 y el j,y genera un conjunto de puntos
alternativos sobrelos que se comprueba la posibilidad de colision.
Si
la ruta presenta colisiones, se intenta estableceruna nueva ruta
recta, pero ahora entre el primervertice y el punto medio del trozo
de camino conel que se acaba de probar.
Si en una de las iteraciones la ruta es valida,es decir es libre
de colisiones, entonces se dapaso a la funcion EliminaArco, que
sustrae delcamino original los vertices que van desde el1 al j,
disminuyendo, por tanto, el valor quedevolvera NumeroDeVertices e
incorporando lanueva ruta al camino final. Por tanto, el
caminooriginal queda configurado con un nuevo verticeinicial y el
camino final con un nuevo tramo recto.
En la figura 14a se presenta un escenario dondeaun no se ha
aplicado el postprocesado. Se mues-tran los arboles generados por
el RRT as como,las distintas posiciones y orientaciones del
robotmovil a lo largo del camino solucion. Una vezobtenido dicho
camino se procede a su postproce-sado. En la figura 14b se muestra
el camino sinlos arboles de generacion. La figura 14c ilustrael
postprocesado aplicado a la primera mitad delcamino, mientras que
la figura 14d muestra elcamino final resultado del proceso de
postproce-sado.
5. APLICACION DE ALGORITMO RRT ENSISTEMAS NO HOLONOMOS
5.1 Sistemas no holonomos
Todos los vehculos rodados presentan restric-ciones no
holonomas. Considerese, por ejemplo,un vehculo de planta
rectangular y conducciondiferencial cuya configuracion puede
determinarsemediante las coordenadas de un punto de referen-cia (se
suele escoger el centro del eje de las ruedas,ver figura 15) y el
valor de , la orientacion deleje longitudinal. El movimiento del
vehculo puedemodelarse mediante la ecuacion (Ollero, 2001):
x
y
=
r cos
2
r cos
2
r sin
2
r sin
2
r
2l
r
2l
1
2
. (1)
En estos vehculos, ver figura 15b, la direccion delmovimiento
esta controlada por las velocidades derodado de cada una de las
ruedas (1, 2).
Este vehculo presenta la siguiente restriccion cin-ematica
(Ollero, 2001):
x0 sin y0 cos = 0. (2)
Esta ecuacion implica la imposibilidad de moverel vehculo en una
direccion distinta a la determi-
MarinaText BoxPlanificacin de Trayectorias con el Algoritmo RRT.
Aplicacin a Robots No Holnomos
JLDIEZLine
MarinaText Box62
-
a)
b)
c)
d)
Figura 14. Planificacion y postprocesado.
Figura 15. Vehculo con conduccion diferencial.
nada por la orientacion del vehculo; es decir, solose puede
mover en el sentido del eje longitudinalde las ruedas.
5.2 RRT y sistemas no holonomos
La aplicacion del algoritmo RRT a sistemas conrestricciones no
holonomas presenta algunos pro-blemas. As, en muchas ocasiones, el
caminoobtenido viola las restricciones cinematicas delsistema (el
camino resultante es tal que el vehcu-lo ha de moverse en
direcciones distintas a ladeterminada por su orientacion, ver
figura 14).Ademas, no es inmediato determinar la secuenciade
movimientos necesarios para conseguir que elmovil se desplace segun
el camino planificado.
Los metodos existentes en la actualidad se basanen una
modificacion sobre el RRT original (LaValle,1998). Consisten en
considerar un conjunto dis-creto de ordenes de control. A la hora
de extenderel arbol, se escogen los vertices mas cercanos aqrand y
se les aplican todas y cada una de lasposibles senales de control.
De entre los puntosas generados se escoge el mas proximo y se
agregaal arbol (LaValle y Kuffner, 1999).
Estos metodos tienen varios inconvenientes (LaValley Kuffner,
1999). Por una parte, es necesariodefinir la metrica que permita
generar trayectoriafactibles, lo cual es un problema de cierta
relevan-cia (LaValle y Kuffner, 1999; Cheng et al., 2001).
MarinaText BoxD. Lpez, F. Gmez-Bravo, F. Cuesta, A. Ollero
JLDIEZLine
MarinaText Box63
-
En muchos casos es necesario hacer uso de unaheurstica
particular, con la que hay que tenerun especial cuidado debido a la
alta sensibilidaddel algoritmo respecto de este elemento (Chengy
LaValle, 2001; Cheng et al., 2001). Por otra,el coste computacional
se eleva: el primero delos metodos necesita aplicar al camino
obtenidotecnicas de optimizacion que permitan filtrar laaparicion
de fluctuaciones inutiles en las senales decontrol aplicadas (Cheng
y LaValle, 2001; Chenget al., 2001); en el caso del segundo metodo,
seplantea el problema del retardo que supone aplicartodas las
ordenes de control.
Los mejores resultados obtenidos al aplicar estosmetodos se han
conseguido considerando ordenesde control que generan lneas rectas
y giros a laderecha, y a la izquierda, ambos con curvaturaacotada.
Si durante el movimiento solo se utilizanvalores de velocidad
positiva, se trata de unaplanificacion basada en los resultados de
Dubins(1957); si por el contrario se consideran valoresde velocidad
positivos y negativos se trata de unaplanificacion basada en los
resultados de Reeds yShepp (1990).
5.3 Maniobras restringidas y RRT
La solucion propuesta en este artculo se basa enla aplicacion
del concepto de maniobra restringida(Gomez-Bravo et al., 2001).
Este tipo de trayec-torias representan un conjunto de maniobras
quepermiten variar una y solo una de las coorde-nadas del espacio
de configuracion. As, es posibleestablecer una trayectoria valida
desde cualquierpunto del arbol hasta el nuevo punto a agregar
consolo obtener la correspondiente combinacion demaniobras. Dado
que son maniobras predefinidas,es extremadamente sencillo obtener
una planti-lla del espacio que ocupara el vehculo durantesu
ejecucion. Por tanto, es posible establecer laposibilidad de
colision sin necesidad de computarexplcitamente la trayectoria.
Por ejemplo, para el caso del vehculo no holonomode conduccion
diferencial, se consideran dos ma-niobras restringidas. La primera
consiste en elcambio de orientacion del vehculo, manteniendola
posicion cartesiana del punto de referencia.Suponiendo que el
vehculo tiene una planta rec-tangular, la plantilla que define esta
maniobra esun crculo centrado en el punto de referencia y deradio
igual a la distancia de los vertices a dichopunto. La segunda
maniobra consiste en desplazarlongitudinalmente el vehculo,
variando en estecaso la coordenada x del sistema de referenciade
igual orientacion a la del robot. La plantillaasociada a esta
maniobra es un rectangulo, delongitud igual al desplazamiento
efectuado y deanchura identica a la de la planta del vehculo.
Cualquier movimiento generico del vehculo es-tara compuesto de
un giro para orientarse a laposicion de destino, un desplazamiento
hasta elpunto destino y una nueva reorientacion para al-canzar la
orientacion final deseada.
a)
b)
Figura 16. RRT aplicado a un robot de conducciondiferencial.
En este artculo, en lugar de utilizar el algoritmoRRT-Ext-Ext
con un conjunto discreto de ordenesde control, se propone emplear
el algoritmo RRT-Ext-Ext original junto con un postprocesado
basa-do en el concepto de maniobra restringida. As,el RRT sigue
manteniendo su velocidad de com-putacion, y es la progresiva
simplificacion de latrayectoria la que depara que el camino no
violelas restricciones no holonomas.
As, partiendo del algoritmo de postprocesadopropuesto en la
Seccion 4, la idea consiste encomprobar, en las sucesivas
iteraciones, la posibili-dad de conexion entre vertices del arbol
mediantealguna maniobra restringida. De este modo, lafuncion
CuerdaValida, en lugar de establecer unalnea recta entre vertices,
comprueba que la plan-tilla asociada a la maniobra no presenta
colisiones.
Por tanto, el camino completo se segmenta aldescomponerlo en una
secuencia de movimientosacordes con las restricciones no holonomas.
En lafigura 16 se ilustran los distintos pasos seguidos enla
obtencion de un camino libre de colisiones paraun vehculo de
conduccion diferencial. En la figura16a se presentan los arboles y
el camino obtenidoal aplicar el algoritmo RRT-Ext-Ext. Por su
parte,en la figura 16b, se muestra el resultado de aplicarel
suavizado mediante las maniobras descritas.
MarinaText BoxPlanificacin de Trayectorias con el Algoritmo RRT.
Aplicacin a Robots No Holnomos
JLDIEZLine
MarinaText Box64
-
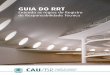
Para evaluar la tecnica propuesta con los meto-dos existentes se
han realizado diversas compara-ciones, incluyendo distintos tipos
de vehculos.As, la figura 17 presenta una comparacion entreuna
trayectoria para un vehculo de conducciondiferencial generada
utilizando el algoritmo RRTcon un conjunto discreto de consignas de
control(ver figura 17a) y una trayectoria generada me-diante el
metodo propuesto (ver figura 17b). Elentorno considerado es el
presentado en LaValley Kuffner (2001), y se ha elegido para
facilitar lacomparacion.
a)
b)
Figura 17. Comparacion de aplicacion a un robotcon conduccion
diferencial. a) RRT con con-junto discreto de consignas de control.
b)RRT basado en maniobras restringidas.
El conjunto discreto de consignas de control consi-derado en la
figura 17a, esta compuesta de catorceposibilidades, incluyendo, por
ejemplo, marchahacia adelante, marcha hacia atras y giros de
diversa amplitud. Tras realizar una serie de diezexperimentos se
obtuvieron los datos mostradosen la tabla 1. Los algoritmos estan
implementadosen JAVA y las simulaciones se realizaron con
unprocesador AMD K7 1700 a 1,4MHz.
Tabla 1. Comparacion aplicacion RRTa vehculo diferencial.
Tiempo Desv. Long. Desv.
medio tpica media tpicacalculo tiempo camino long.(ms) (ms) (m)
(m)
RRT
consignas 7620,0 3563,8 179,7 34,1
discretas
RRT
maniobras 652,7 93,8 51,9 4,7
retringidas
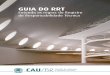
Asimismo, la figura 18 muestra una comparacionentre una
trayectoria para un vehculo con con-figuracion Ackerman, similar a
un coche (Ollero,2001), con radio de curvatura mnimo de 2,5
me-tros, utilizando el algoritmo RRT con un conjuntodiscreto de
consignas de control (ver figura 18a)y una trayectoria generada
mediante el metodopropuesto (ver figura 18b).
En este caso las maniobras restringidas son lasdescritas en
(Gomez-Bravo et al., 2001). Por suparte, el conjunto de consignas
de control estabacompuesto tambien por catorce posibilidades,
in-cluyendo giros de curvatura acotada. Tras realizaruna serie de
diez experimentos se obtuvieron losdatos mostrados en la tabla
2.
Tabla 2. Comparacion aplicacion RRTa vehculo con configuracion
Ackerman.
Tiempo Desv. Long. Desv.
medio tpica media tpicacalculo tiempo camino long.
(ms) (ms) (m) (m)
RRT
consignas 11408,2 7146,7 173,2 31,0
discretas
RRT
maniobras 701,8 73,5 84,7 3,4
restringidas
Como muestran los datos, el metodo propuesto re-quiere menor
tiempo de calculo y genera caminosmas cortos. De este modo, el
elevado coste com-putacional requerido por el algoritmo RRT
alconsiderar un conjunto discreto de ordenes, secompensa con la
utilizacion del algoritmo RRT-Ext-Ext original (mucho mas rapido) y
un post-procesado, en el que el ahorro de tiempo se
debe,fundamentalmente, a que para la deteccion decolisiones se
utiliza la plantilla asociada a cadamaniobra en lugar de los puntos
de la trayectoria.
Finalmente, para ilustar la efectividad del meto-do, en la
figura 19 se presenta un experimentocon un vehculo Ackerman, cuyo
radio mnimo
MarinaText BoxD. Lpez, F. Gmez-Bravo, F. Cuesta, A. Ollero
JLDIEZLine
MarinaText Box65
-
a)
b)
Figura 18. Comparacion de aplicacion a un robotcon configuracion
Ackerman. a) RRT conconjunto discreto de consignas de control.
b)RRT basado en maniobras restringidas.
de curvatura es de 6 metros, en un entorno mascomplejo dada su
maniobrabilidad.
6. CONCLUSIONES
Los algoritmos puramente aleatorios de planifi-cacion de caminos
(tales como RRT y sus exten-siones) constituyen una alternativa a
los metodosde planificacion convencionales para determina-dos
entornos complejos y robots con restricciones.Los requisitos
computacionales hacen viable suimplementacion en tiempo real,
incluso para unaposible replanificacion en lnea ante obstaculos
nomodelados. En este sentido la inclusion de lasmaniobras
restringidas como herramienta en los
Figura 19. Aplicacion de RRT-Ext-Ext con ma-niobras restringidas
a un robot con configu-racion Ackerman.
algoritmos existentes puede suponer una mejorainteresante.
7. AGRADECIMIENTOS
Este trabajo ha sido parcialmente financiado porel proyecto
DPI2005-02293.
REFERENCIAS
Bruce, J., and M. Veloso (2002). Real-Time Ran-domized Path
Planning for Robot Naviga-tion, Proc. IROS 2002, Switzerland.
Cheng, P., and S. M. LaValle (2001). Reducingmetric sensitivity
in randomized trajectorydesign. In: Proc. IEEE/RSJ Intl Conf.
onIntelligent Robots and Systems, pp. 4348.
Cheng, P., Z. Shien and S. M. LaValle(2001). RRT-Based
Trajectory Design for Au-tonomous Automobiles and Spacecraft.
Dubins, L.E. (1957). On curves of minimal lengthwith a
constraint on average curvature andwith prescribed initial and
terminal posi-tion and tangents. Amer. J. Math., Vol 79,pp.
497516.
Gomez Bravo F., F. Cuesta and A. Ollero. (2001).Parallel and
diagonal parking in nonholonom-ic autonomous vehicles. Engineering
Aplica-tion of Artificial Inteligence. Vol 14 No. 1,pp. 419434.
Kuffner, J.J., and S. M. LaValle (2000). RRT-connect: An
efficient approach to single-querypath planning. In: Proc. IEEE
Intl Conf. onRobotics and Automation, pp. 9951001.
Latombe, J.C. (1991). Robot Motion Planning,Kluwer Academic
Pulisher.
Laumont, J.P., P.E. Jacobs, M. Taix and M.Murray (1994). A
Motion Planner for Non-holonomic Mobile Robots. IEEE Trans.
onRobotics and Autom, Vol 10, No 5: pp. 577593.
LaValle, S.M. (1998). Rapidly-exploring randomtrees: A new tool
for path planning. ComputerScience Dept., Iowa State University TR
98-11.
MarinaText BoxPlanificacin de Trayectorias con el Algoritmo RRT.
Aplicacin a Robots No Holnomos
JLDIEZLine
MarinaText Box66
-
LaValle, S. M., and J. J. Kuffner (1999). Ran-domized
kinodynamic planning. In: Proc.IEEE Intl Conf. on Robotics and
Automa-tion, pp. 473479.
LaValle, S.M., and J.J. Kuffner (2001). Rapidly-Exploring Random
Trees: Progress andProspects. In Algorithmic and Computation-al
Robotics: New Directions. B. R. Donald, K.M. Lynch, and D. Rus,
editors, , pp. 293308.
Munoz, V. (1995). Planificacion de Trayectoriaspara Robots
Moviles. Tesis Doctoral. Univer-sidad de Malaga.
Ollero, A. (2001). Robotica: manipuladores yRobots Moviles.
Marcombo Boixareu.
Reeds, J.A. and R.A. Shepp, (1990). Optimalpaths for a car that
goes both forward andbackward. Pacific J. Math., Vol 145 n 2,pp.
367393.
MarinaText BoxD. Lpez, F. Gmez-Bravo, F. Cuesta, A. Ollero
JLDIEZLine
MarinaText Box67