Embed Size (px)
DESCRIPTION
Plano de aula- maquinas simples- alavancas
Citation preview

1
PLANO DE AULA
Professora: Formação:.
Disciplina: Física Tema: Máquinas Simples Assunto: Alavancas Tempo estimado: 02 aulas Curso:
Conteúdos Estruturantes Conteúdos Gerais e Específicos Justificativa
Encaminhamento
Metodológico e Recursos
Didáticos
Avaliação
Dinâmica, movimento e sua causa-
Máquinas Simples.
o Máquinas Simples
o Alavancas:
_ Força resistente;
_Força potente;
_Equilíbrio:
a) Braço da força potente
e resistente;
b) Equilíbrio de rotação e
translação.
_Tipos de Alavancas:
a) Interfixa;
b) Inter-resistente;
c) Interpotente.
_Alavancas do corpo
humano:
a) Antebraço;
b) Pé;
c) Cabeça.
A evolução da humanidade
se deu em grande parte pela
incorporação de máquinas
simples, nos auxiliando na
multiplicação da força de
trabalho e assim, a
realização de tarefas com
maior eficiência atualmente
indispensáveis. O estudante
deverá ser capaz de:
_Identificar e perceber em
seu cotidiano instrumentos
caracterizados como
máquinas simples, sua
funcionalidade e finalidade;
_Relacionar à prática
conceitos teóricos,
compreender e elaborar
instrumentos com o intuito
apresentado e estimar sua
viabilidade nas diversas
aplicações no cotidiano,
civis, industriais, lazer, etc.
o Encaminhamento
Metodológico:
_Situações problemas que
envolvam o cotidiano do
aluno e questionamentos
constantes;
_Explicação com exemplos,
animações, experimentação
e atividades na lousa;
_Correção de atividades na
lousa e individual quando
necessário;
_Atividade avaliativa.
o Recursos:
_Quadro branco;
_Projetor Multimídia;
_Notebook.
_Exercícios propostos
em sala de aula e tarefa;
_Organização e
qualidade do material
proposto como trabalho.
_Participação em sala de
aula;
_Avaliação escrita.

2
PLANO DE ENSINO
1. Introdução
A evolução da humanidade se deu em grande parte pela capacidade das pessoas multiplicarem sua
força de trabalho. Elas deram um passo decisivo na luta pela sobrevivência quando perceberam que
poderiam realizar tarefas com mais eficiência, valendo-se dos objetos à sua volta em vez das próprias
mãos. Daí para frente não pararam mais de criar alternativas para as diversas atividades das quais
dependiam para viver1.
Arquimedes (287 a.C.-212 a.C.) nasceu e viveu em Siracusa, região da Magna Grécia, hoje sul da
Itália, deixou para a humanidade inúmeras invenções, descobertas e uma célebre frase: “Dêem-me uma
alavanca e um ponto de apoio e levantarei o mundo”. Entre suas descobertas está a lei que rege o
equilíbrio da mais antiga das máquinas simples, a alavanca2.
2. Objetivos
Identificar instrumentos caracterizados como máquinas simples, compreender sua funcionalidade e
finalidade; Relacionar a prática aos conceitos teóricos e estimar sua viabilidade nas diversas aplicações
no cotidiano, civis, industriais, lazer, etc.
3. Desenvolvimento
3.1 Conteúdo e Definições:
Máquinas simples
Máquinas simples são dispositivos em geral que permitem multiplicar uma força com a finalidade de
facilitar a realização de certa tarefa. Isso significa que, com uma força menos intensa, pode-se por meio
dela, equilibrar uma força mais intensa. São exemplos de máquinas simples: polias móveis e fixas, planos
inclinados e alavancas.
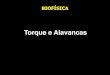
Alavanca
A alavanca é um sistema constituído, tipicamente de uma barra rígida apoiada em um ponto de
suporte fixo como mostra a figura abaixo (Figura 1):

3
Figura 1. Representação esquemática de uma alavanca.
Força resistente e Força potente
O peso da carga é a força a ser vencida, sendo denominada força resistente ( ). A força aplicada na
outra extremidade, que ergue a carga, é a força potente (Fp) como mostra a figura 2.
Figura 2. A força potente ( ) tem nessa alavanca, uma intensidade menor que a força resistente ( ).
Equilíbrio:
Braço de força potente e resistente
Representando as forças que agem em uma alavanca (Figura 3), é a força resistente, é a força
potente e é a força que o apoio exerce na alavanca. A distância entre o ponto de apoio A e a força potente
chama-se braço de força potente (bP), e a distância entre o ponto de apoio A e a força resistente é o
braço de força resistente (bR).
→FR
→FP
→FR
→FR
→FP
→FN
→FP
→FR

4
Figura 3. Forças que agem em uma alavanca em equilíbrio.
Equilíbrio de rotação e translação
Duas condições devem ser impostas para o equilíbrio da alavanca:
a) Equilíbrio de rotação: o torque (ou momento) das forças que tendem a girar a alavanca no
sentido horário, em torno do ponto A, deve anular o das forças que tendem a girar a alavanca
no sentido anti-horário. Em modulo temos:
b) Equilíbrio de translação: a resultante das forças que agem na alavanca deve ser nula. Em
módulo temos:
Exemplo 1
Na alavanca mostrada na figura abaixo (Figura 4), o peso do menino, que é a força resistente, tem
intensidade de 500 N. Determine a intensidade da força potente e a intensidade da força que o apoio exerce
na alavanca, sabendo que a alavanca está em equilíbrio e que, os braços da força potente e resistente valem
4m e 1m, respectivamente.
Figura 4. Esquematização das forças que agem na gangorra.
Impondo a condição de equilíbrio, temos:

5
Este exemplo mostra como uma força de intensidade 125 N conseguiu equilibrar uma força de
intensidade 500 N, quatro vezes mais intensa. Esta é uma das finalidades das máquinas simples: reduzir a
intensidade da força necessária para estabelecer um equilíbrio.
Impondo o equilíbrio de translação, podemos determinar a intensidade da força que o apoio exerce na
alavanca:
Tipos de alavanca
Dependendo da posição relativa dos pontos de aplicação da força potente, da força resistente e do
ponto de apoio A, teremos três tipos de alavanca:
a) Interfixa: O ponto de apoio A situa-se entre os pontos de aplicação das forças resistente e
potente. Exemplos: martelo, tesoura, alicate.
b) Inter-resistente: O ponto de aplicação da força resistente fica entre os pontos de apoio e de
aplicação da força potente. Exemplos: abridor de garrafas, carrinho de mão, quebra nozes
(alavanca dupla).
c) Interpotente: O ponto de aplicação da força potente localiza-se entre os pontos de apoio e de
aplicação da força resistente. Exemplos: vassoura, acelerador de automóvel.
Alavancas do corpo humano
a) Cabeça: é uma alavanca interfixa. Quando inclinada para trás ou para frente, a força resistente é
o peso da cabeça. A força potente é exercida pelos músculos do pescoço. A articulação da
cabeça com a coluna vertebral define o ponto de apoio.
b) Pé: é uma alavanca inter-resistente. Quando erguemos o corpo, ficamos na ponta do pé, parte do
peso do nosso corpo, sustentado pelo pé, é a força resistente. A força potente é exercida pelos
músculos gêmeos, que formam a “barriga” da perna. A ponta do pé é o ponto de apoio.
c) Antebraço: é uma alavanca interpotente. A força resistente é o peso do objeto sustentado pela
mão. A força potente é exercida pelo músculo do bíceps. O cotovelo é o ponto de apoio.

6
3.2 Exercícios
1) Classifique cada alavanca em interfixa, interpotente ou inter-resistente. Indique com uma
seta, a direção e sentido das forças potente e resistente e o ponto de apoio.
2) Define-se para uma máquina simples uma grandeza denominada vantagem mecânica (VM)
como sendo o quociente entre as intensidades das forças resistente (FR) e potente (FP).
Observe a alavanca, de peso desprezível, esquematizada abaixo:
Determine:
a) a intensidade da força potente;
b) a vantagem mecânica.
DESAFIO
Uma barra homogênea AB, de peso desprezível e comprimento igual a 1,0 m, é mantida na
posição horizontal, sobre o apoio C, pelas caixas de pesos 70 N e 30 N, conforme a figura
abaixo:
Determine:
a) a) a distância x entre a extremidade A e o apoio C;
b) b) a intensidade da força que o apoio exerce na
barra.

7
4. Síntese
5. Avaliação
6. Referências Bibliográficas