Embed Size (px)
Citation preview
RYSZARD MARKIEWICZ
PODSTAWY MECHATRONIKI – ISTOTA MECHATRONIKI
SPIS TRE�CI L.P. TYTUŁ str.
SPIS TRE�CI 1 WST�P 2
1. Poj�cia podstawowe mechatroniki 3 1.1. Definicja mechatroniki 3 1.2. Rozwój i cele mechatroniki 4
2. Urz�dzenia mechatroniczne 8
2.1. Urz�dzenia powszechnego u�ytku 8 2.2. Budowa modułowa urz�dze� mechatronicznych 12
3. Systemy mechatroniczne 14
3.1. Poj�cie systemu 14 3.2. Czujniki 16 3.3. Elementy wykonawcze 17 3.4. Procesy sterowania 21
4. Robotyka 24
4.1. Współczesne roboty przemysłowe 25 4.2. Realizacja ruchów mechanizmów robotów 26 4.3. Linia produkcyjna 28
ISTOTA MECHATRONIKI 2
WST�P
Druga połowa XX w – w jednej z niewielkich Japo�skich firm powstaje aparat małoobrazkowy o zautomatyzowanych funkcjach ustawiania parametrów ekspozycji zdj��. Wła�ciwie nic szczególnego – po prostu jeszcze jeden z produktów nowoczesnej techniki - fuzji znanych dziedzin mechaniki precyzyjnej, elektrotechniki i elektroniki oraz programu steruj�cego automatyk�. Wła�ciwie nic szczególnego – urz�d patentowy i zastrze�enie nazwy nowego typu konstrukcji. Zaistniał termin - MECHATRONIKA. Nie tylko zaistniał. Termin ten na trwałe wkroczył do współczesnej techniki. Definicja mechatroniki nie jest wcale tak oczywista. Mówienie o fuzji trzech dziedzin wiedzy jest znacznym uproszczeniem i nie oddaje ono sensu technicznego oraz zasady działania konstrukcji, których dotyczy. Mechatronika to całkiem nowy model pracy układu mechanicznego. Istnieje wzajemne oddziaływanie pomi�dzy cz��ci� mechaniczn�, elektryczn� oraz programami steruj�cymi. To wzajemne oddziaływanie wpływa na typ rozwi�za� w ka�dej z omawianych dziedzin. Konstrukcje mechatroniczne s� modelowane w przestrzeni programu. W oparciu o ten model dokonywane s� korekty elementów konstrukcji mechatronicznych oraz tworzone programy steruj�ce i reguluj�ce ich prac�. Wprowadzenie specjalno�ci mechatronika do szkół �rednich wymaga wcze�niejszego stworzenia bazy informacyjnej o poj�ciach i terminach, dotycz�cych zarówno mechaniki jak te� elektrotechniki i elektroniki oraz sposobów przetwarzania informacji. Przedmiot mechatronika obejmuje trzy du�e dziedziny nauki i tak wła�nie został podzielony podr�cznik. Ka�da z cz��ci stanowi niezale�ny moduł, lecz równocze�nie w ka�dej z nich pokazano punkty styku i wzajemnego oddziaływania . Efektem tych oddziaływa� s� rozwi�zania mog�ce zaistnie� tylko w konstrukcjach okre�lanych mianem mechatroniczne. Mechatronika staje si� powoli wizytówk� XXI w i dla tego tak wa�ne jest wdro�enie jej do programów edukacyjnych ju� na poziomie szkół �rednich.
ISTOTA MECHATRONIKI 3
mechatronika
elektrotechnika elektronika
informatyka
aktoryka sensoryka
modelowanie
mechanika
technika obliczeniowa
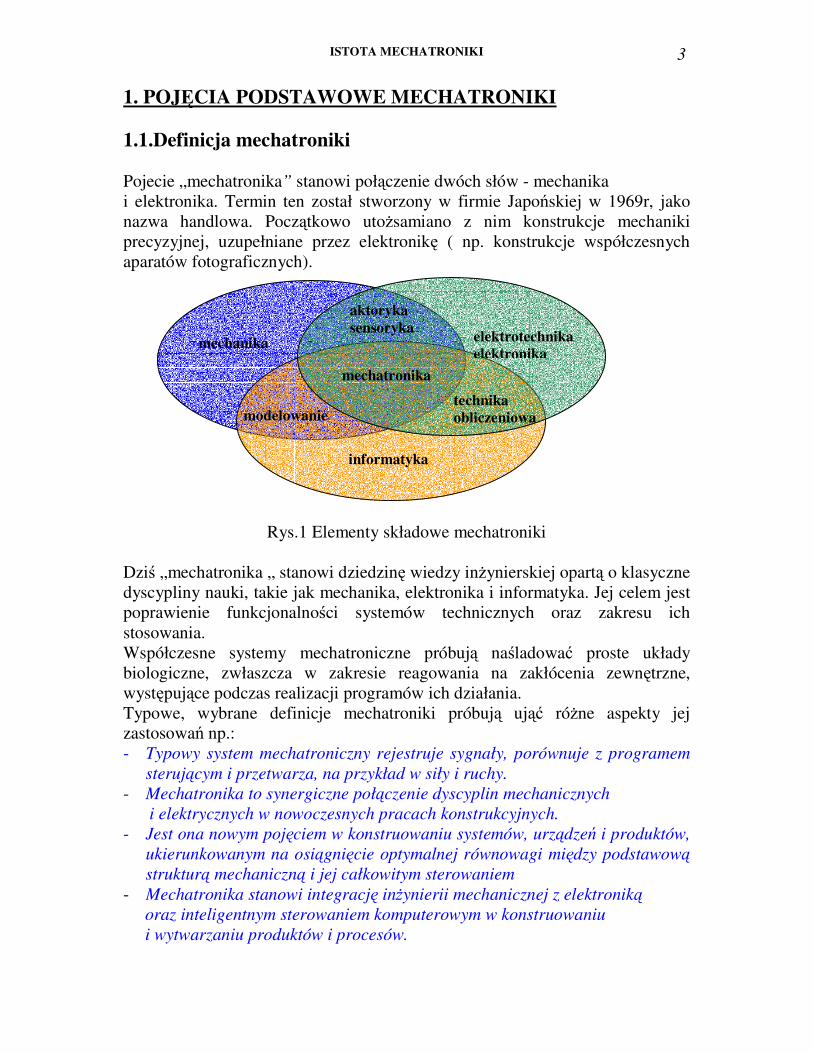
1. POJ�CIA PODSTAWOWE MECHATRONIKI 1.1.Definicja mechatroniki Pojecie „mechatronika” stanowi poł�czenie dwóch słów - mechanika i elektronika. Termin ten został stworzony w firmie Japo�skiej w 1969r, jako nazwa handlowa. Pocz�tkowo uto�samiano z nim konstrukcje mechaniki precyzyjnej, uzupełniane przez elektronik� ( np. konstrukcje współczesnych aparatów fotograficznych).
Rys.1 Elementy składowe mechatroniki Dzi� „mechatronika „ stanowi dziedzin� wiedzy in�ynierskiej opart� o klasyczne dyscypliny nauki, takie jak mechanika, elektronika i informatyka. Jej celem jest poprawienie funkcjonalno�ci systemów technicznych oraz zakresu ich stosowania. Współczesne systemy mechatroniczne próbuj� na�ladowa� proste układy biologiczne, zwłaszcza w zakresie reagowania na zakłócenia zewn�trzne, wyst�puj�ce podczas realizacji programów ich działania. Typowe, wybrane definicje mechatroniki próbuj� uj�� ró�ne aspekty jej zastosowa� np.: - Typowy system mechatroniczny rejestruje sygnały, porównuje z programem
steruj�cym i przetwarza, na przykład w siły i ruchy. - Mechatronika to synergiczne poł�czenie dyscyplin mechanicznych i elektrycznych w nowoczesnych pracach konstrukcyjnych. - Jest ona nowym poj�ciem w konstruowaniu systemów, urz�dze� i produktów,
ukierunkowanym na osi�gni�cie optymalnej równowagi mi�dzy podstawow� struktur� mechaniczn� i jej całkowitym sterowaniem
- Mechatronika stanowi integracj� in�ynierii mechanicznej z elektronik� oraz inteligentnym sterowaniem komputerowym w konstruowaniu i wytwarzaniu produktów i procesów.
ISTOTA MECHATRONIKI 4
Z powy�szych definicji wynika, �e mechatronika ma charakter interdyscyplinarny. W zakresie podstawowych dziedzin obejmuje: - mechanik� ( mechanik� techniczn�, budow� maszyn, mechanik� precyzyjn�) - elektrotechnik� i elektronik� (mikroelektronik�, technik� pomiarów,
aktoryk�) - informatyk� ( teori� systemów, przetwarzanie danych, sztuczn� inteligencj�,
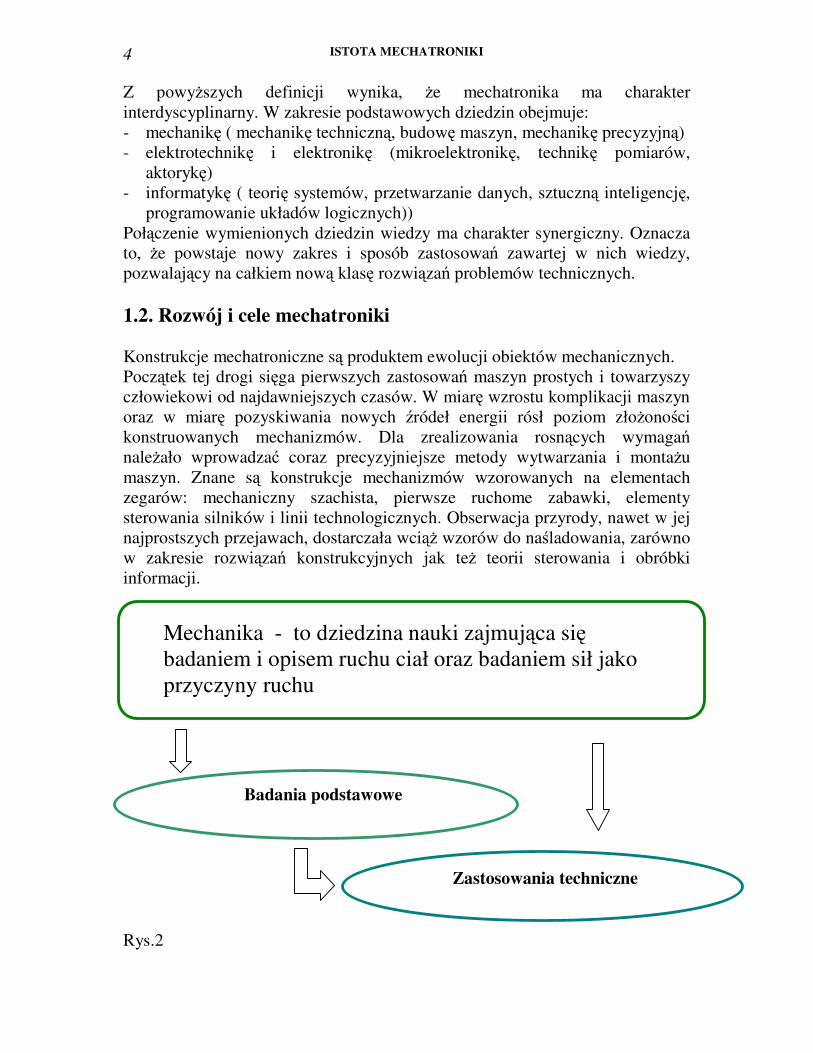
programowanie układów logicznych)) Poł�czenie wymienionych dziedzin wiedzy ma charakter synergiczny. Oznacza to, �e powstaje nowy zakres i sposób zastosowa� zawartej w nich wiedzy, pozwalaj�cy na całkiem now� klas� rozwi�za� problemów technicznych. 1.2. Rozwój i cele mechatroniki Konstrukcje mechatroniczne s� produktem ewolucji obiektów mechanicznych. Pocz�tek tej drogi si�ga pierwszych zastosowa� maszyn prostych i towarzyszy człowiekowi od najdawniejszych czasów. W miar� wzrostu komplikacji maszyn oraz w miar� pozyskiwania nowych �ródeł energii rósł poziom zło�ono�ci konstruowanych mechanizmów. Dla zrealizowania rosn�cych wymaga� nale�ało wprowadza� coraz precyzyjniejsze metody wytwarzania i monta�u maszyn. Znane s� konstrukcje mechanizmów wzorowanych na elementach zegarów: mechaniczny szachista, pierwsze ruchome zabawki, elementy sterowania silników i linii technologicznych. Obserwacja przyrody, nawet w jej najprostszych przejawach, dostarczała wci�� wzorów do na�ladowania, zarówno w zakresie rozwi�za� konstrukcyjnych jak te� teorii sterowania i obróbki informacji. Rys.2
Badania podstawowe
Mechanika - to dziedzina nauki zajmuj�ca si� badaniem i opisem ruchu ciał oraz badaniem sił jako przyczyny ruchu
Zastosowania techniczne
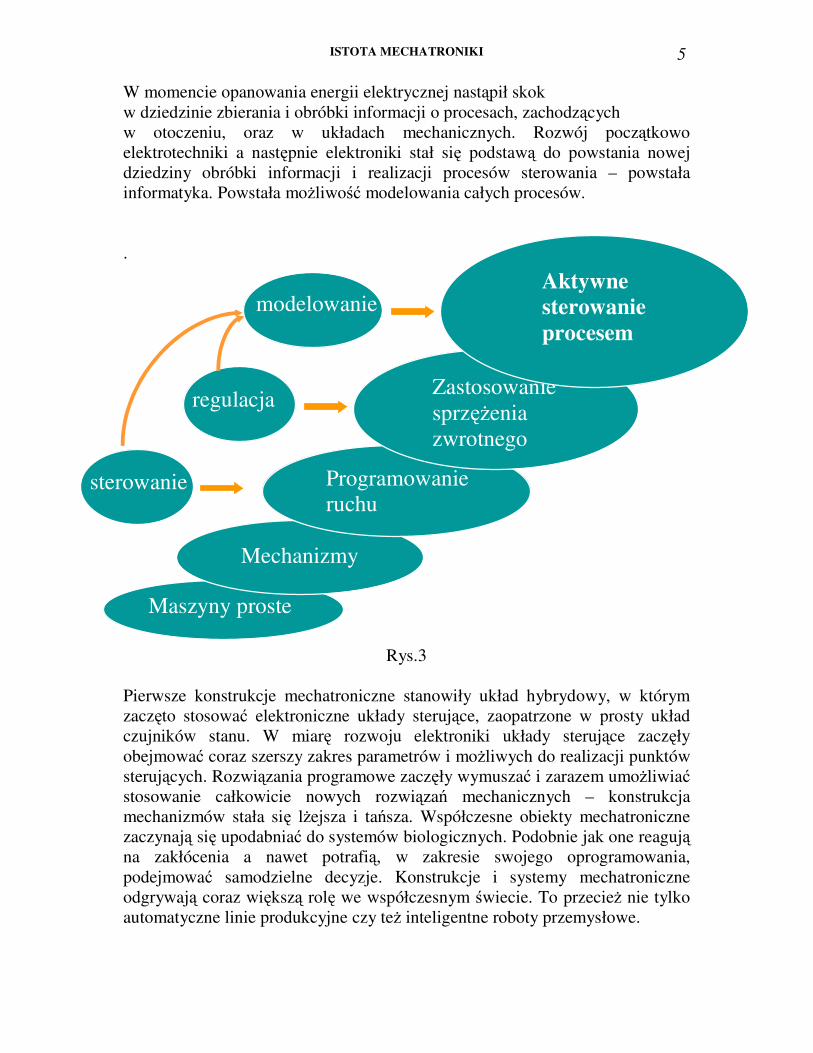
ISTOTA MECHATRONIKI 5 W momencie opanowania energii elektrycznej nast�pił skok w dziedzinie zbierania i obróbki informacji o procesach, zachodz�cych w otoczeniu, oraz w układach mechanicznych. Rozwój pocz�tkowo elektrotechniki a nast�pnie elektroniki stał si� podstaw� do powstania nowej dziedziny obróbki informacji i realizacji procesów sterowania – powstała informatyka. Powstała mo�liwo�� modelowania całych procesów. .
Rys.3 Pierwsze konstrukcje mechatroniczne stanowiły układ hybrydowy, w którym zacz�to stosowa� elektroniczne układy steruj�ce, zaopatrzone w prosty układ czujników stanu. W miar� rozwoju elektroniki układy steruj�ce zacz�ły obejmowa� coraz szerszy zakres parametrów i mo�liwych do realizacji punktów steruj�cych. Rozwi�zania programowe zacz�ły wymusza� i zarazem umo�liwia� stosowanie całkowicie nowych rozwi�za� mechanicznych – konstrukcja mechanizmów stała si� l�ejsza i ta�sza. Współczesne obiekty mechatroniczne zaczynaj� si� upodabnia� do systemów biologicznych. Podobnie jak one reaguj� na zakłócenia a nawet potrafi�, w zakresie swojego oprogramowania, podejmowa� samodzielne decyzje. Konstrukcje i systemy mechatroniczne odgrywaj� coraz wi�ksz� rol� we współczesnym �wiecie. To przecie� nie tylko automatyczne linie produkcyjne czy te� inteligentne roboty przemysłowe.
Maszyny proste
Mechanizmy
Programowanie ruchu
Zastosowanie sprz��enia zwrotnego
Aktywne sterowanie procesem
sterowanie
modelowanie
regulacja
ISTOTA MECHATRONIKI 6
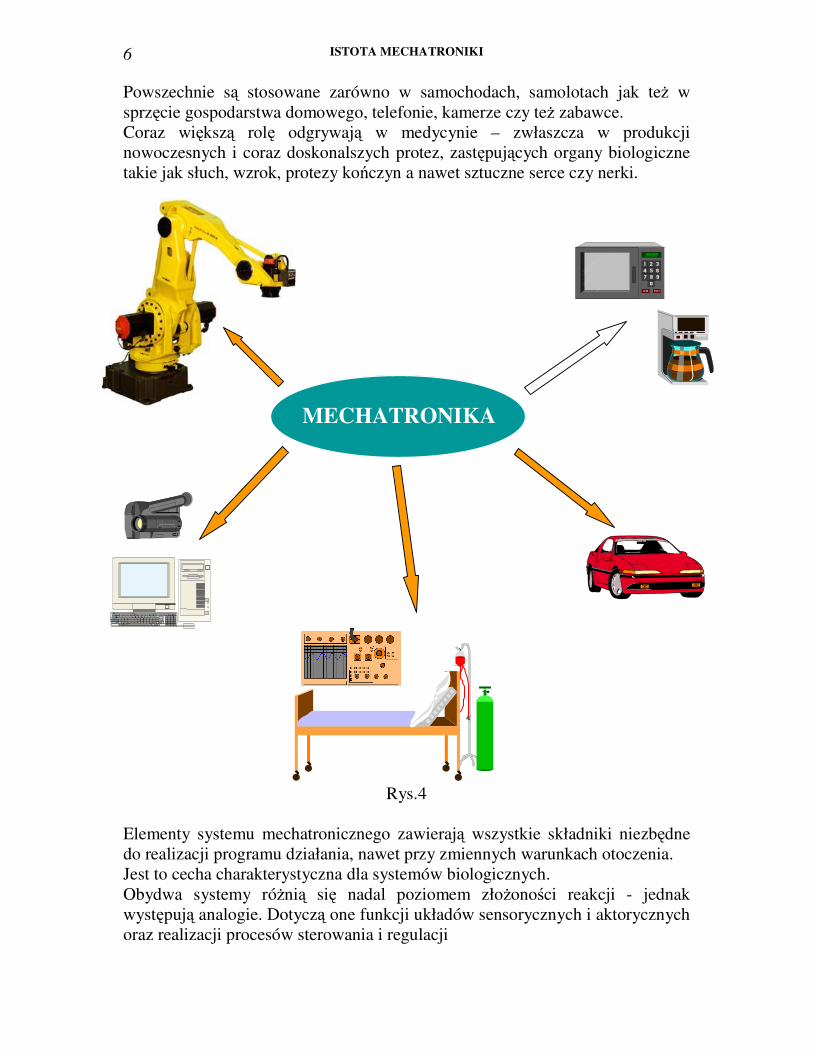
Powszechnie s� stosowane zarówno w samochodach, samolotach jak te� w sprz�cie gospodarstwa domowego, telefonie, kamerze czy te� zabawce. Coraz wi�ksz� rol� odgrywaj� w medycynie – zwłaszcza w produkcji nowoczesnych i coraz doskonalszych protez, zast�puj�cych organy biologiczne takie jak słuch, wzrok, protezy ko�czyn a nawet sztuczne serce czy nerki.
Rys.4 Elementy systemu mechatronicznego zawieraj� wszystkie składniki niezb�dne do realizacji programu działania, nawet przy zmiennych warunkach otoczenia. Jest to cecha charakterystyczna dla systemów biologicznych. Obydwa systemy ró�ni� si� nadal poziomem zło�ono�ci reakcji - jednak wyst�puj� analogie. Dotycz� one funkcji układów sensorycznych i aktorycznych oraz realizacji procesów sterowania i regulacji
MECHATRONIKA
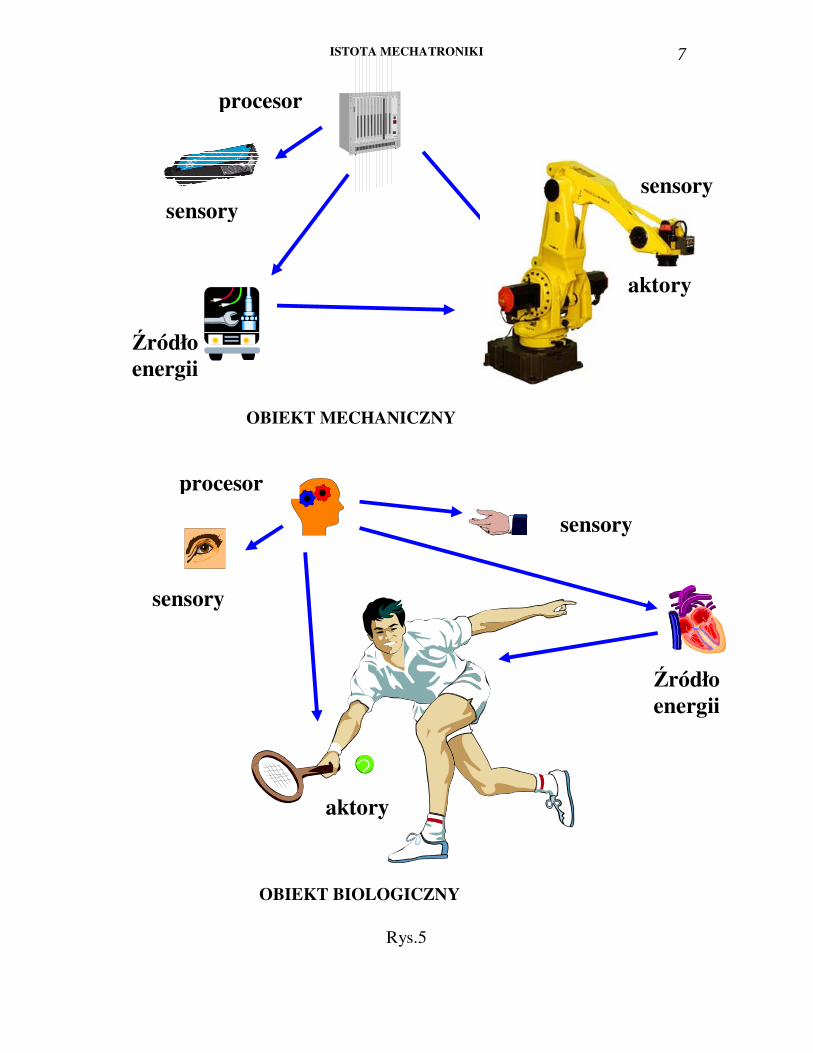
ISTOTA MECHATRONIKI 7
Rys.5
OBIEKT BIOLOGICZNY
aktory
�ródło energii
procesor
sensory
sensory
OBIEKT MECHANICZNY
�ródło energii
sensory
procesor
sensory
aktory
ISTOTA MECHATRONIKI 8
Rys.6
Rys.7
2.URZ�DZENIA MECHATRONICZNE
Urz�dzenie mechatroniczne jest to system programowalny i samosterowny realizuj�cy funkcje u�ytkowe, do których został stworzony. Taka bardzo unaukowiona definicja dotyczy szeregu maszyn i urz�dze� z naszego otoczenia, z których korzystamy na co dzie�, bez wnikania jaka jest ich konstrukcja i jak wła�ciwie działaj�. Urz�dzenia mechatroniczne to zarówno współczesny sprz�t gospodarstwa domowego, jak te� samochód czy układ klimatyzacji mieszkania, komputer, aparat fotograficzny. Nazwa „system” została u�yta celowo, poniewa� nie musi to by� koniecznie produkt mechaniczny. Funkcje samosterowno�ci i programowanego działania mog� by� realizowane przez dowolne urz�dzenie elektryczne lub elektroniczne. Poni�ej podane zostan� przykłady z naszego otoczenia tego najbli�szego jak te� tego na ogół niedost�pnego - współczesnej linii produkcyjnej. 2.1.Urz�dzenia powszechnego u�ytku
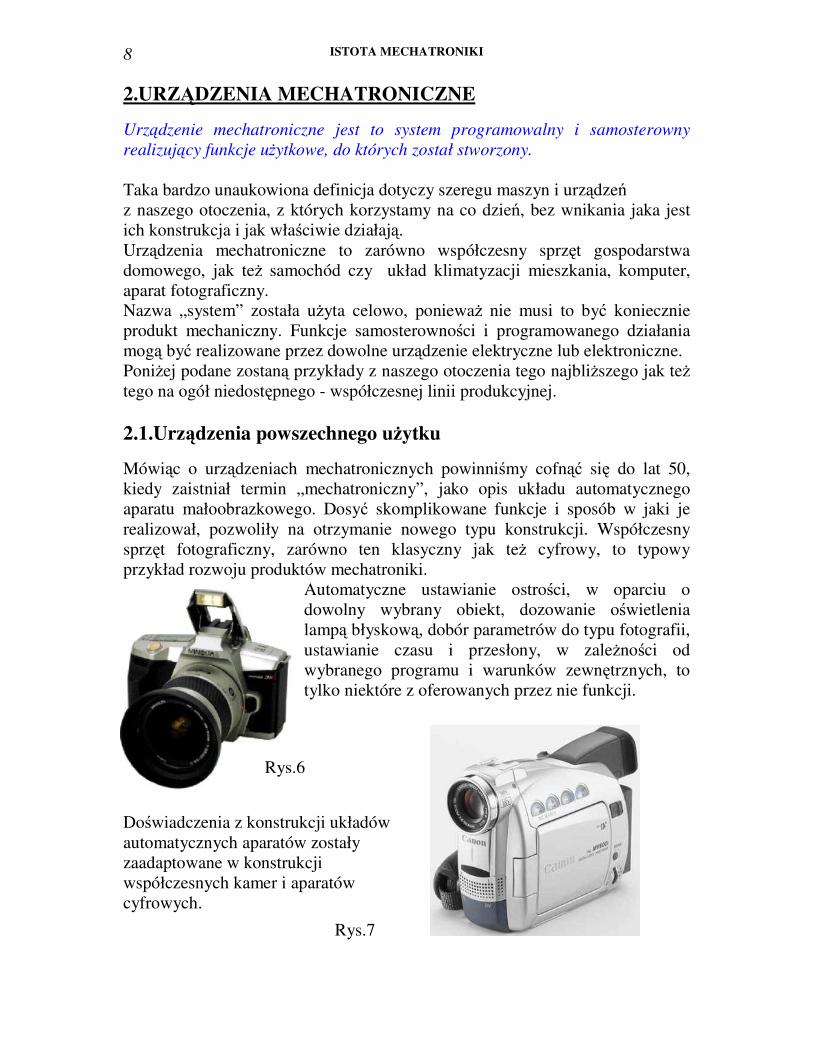
Mówi�c o urz�dzeniach mechatronicznych powinni�my cofn�� si� do lat 50, kiedy zaistniał termin „mechatroniczny”, jako opis układu automatycznego aparatu małoobrazkowego. Dosy� skomplikowane funkcje i sposób w jaki je realizował, pozwoliły na otrzymanie nowego typu konstrukcji. Współczesny sprz�t fotograficzny, zarówno ten klasyczny jak te� cyfrowy, to typowy przykład rozwoju produktów mechatroniki.
Automatyczne ustawianie ostro�ci, w oparciu o dowolny wybrany obiekt, dozowanie o�wietlenia lamp� błyskow�, dobór parametrów do typu fotografii, ustawianie czasu i przesłony, w zale�no�ci od wybranego programu i warunków zewn�trznych, to tylko niektóre z oferowanych przez nie funkcji.
Do�wiadczenia z konstrukcji układów automatycznych aparatów zostały zaadaptowane w konstrukcji współczesnych kamer i aparatów cyfrowych.

ISTOTA MECHATRONIKI 9
Rys.8
Rys.9
Rys.10
Podobnie jak sprz�t fotograficzny produkty mechatroniczne wkroczyły do gospodarstwa domowego. Ka�dy z nas korzysta z pralki automatycznej.
Wybór programu stał si� oczywist� czynno�ci�, a przecie� towarzysz� mu okre�lone funkcje, realizowane przez pralk�. Pralka potrafi sama dozowa� wod�, wył�cza� i wł�cza� grzałk�, ale równie� dopasowywa� obroty wirowania do obci��enia b�bna, a nawet rozkłada� wirowane rzeczy na obwodzie b�bna, tak by nie powodowa� jego nadmiernych drga�. Wiemy równie�, �e w przypadku awarii nasze, nawet zaawansowane, umiej�tno�ci techniczne s� zazwyczaj niewystarczaj�ce do ewentualnej naprawy. Zagl�daj�c do �rodka, o ile potrafimy sforsowa� niewidoczne zamki, mo�emy dostrzec
nie tylko cz��ci mechaniczne, ale równie� wi�zki przewodów elektrycznych, czujniki, oraz elektroniczny blok steruj�cy – wszystko to, co pozwala na takie wła�nie jej działanie. Innym z przykładów jest sprz�t kuchenny. Robot wieloczynno�ciowy, ekspres do kawy, kuchenka mikrofalowa a nawet płyta kuchenna, to znowu sprz�t programowalny i w jakim� stopniu obdarzony zdolno�ci� analizowania zmieniaj�cych si� warunków zewn�trznych. Cech� współczesnych produktów jest nie tylko ich u�ytkowo��, ale równie� forma plastyczna. Tworzywa sztuczne, aluminium, szkło organiczne, s� podstawowym materiałem konstrukcyjnym. Uwaga o niewidocznych zamkach, uniemo�liwiaj�cych demonta� obudowy, jest całkowicie uzasadniona, równie� w stosunku do wszystkich tych urz�dze�.
Po za kuchni� mechatronika wkroczyła do konstrukcji sprz�tu audiowizualnego oraz komputera. Ta grupa urz�dze� zawiera przecie� precyzyjne mechanizmy odtwarzaczy i nagrywarek laserowych, układy dopasowuj�ce i przeszukuj�ce stacje nadawcze zgodnie z zało�onymi parametrami wybranego programu.
ISTOTA MECHATRONIKI 10
Rys.11
Rys.12
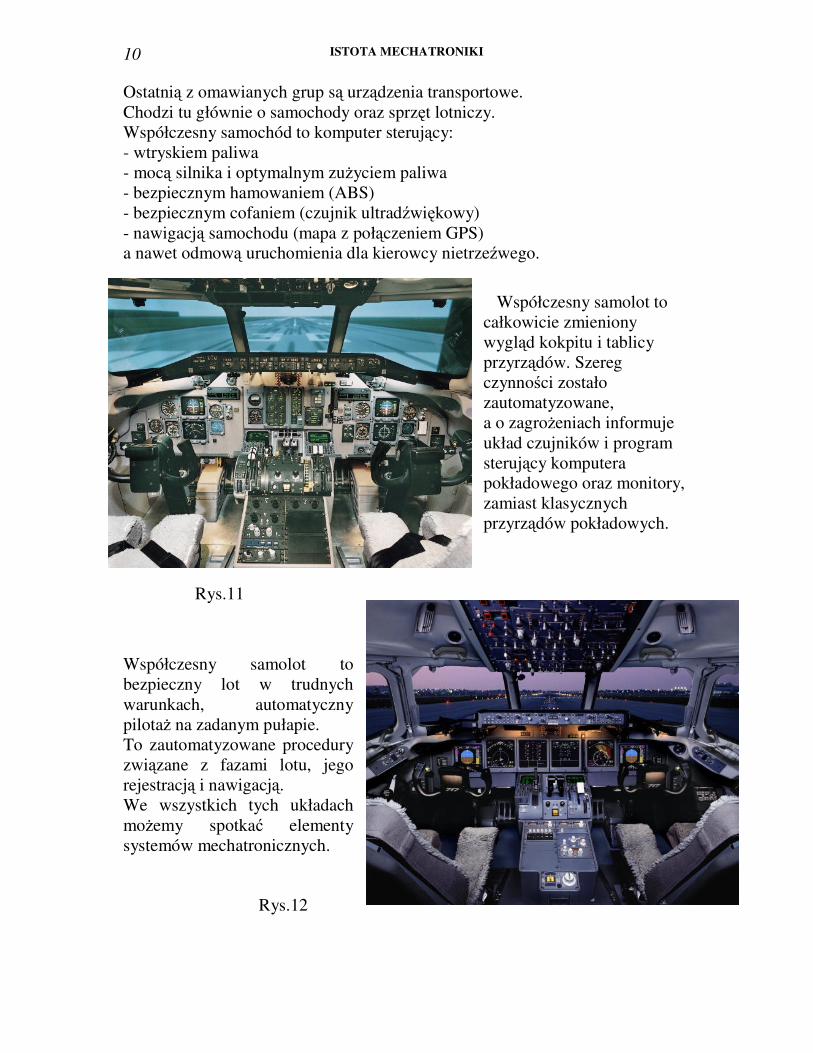
Ostatni� z omawianych grup s� urz�dzenia transportowe. Chodzi tu głównie o samochody oraz sprz�t lotniczy. Współczesny samochód to komputer steruj�cy: - wtryskiem paliwa - moc� silnika i optymalnym zu�yciem paliwa - bezpiecznym hamowaniem (ABS) - bezpiecznym cofaniem (czujnik ultrad�wi�kowy) - nawigacj� samochodu (mapa z poł�czeniem GPS) a nawet odmow� uruchomienia dla kierowcy nietrze�wego.
Współczesny samolot to całkowicie zmieniony wygl�d kokpitu i tablicy przyrz�dów. Szereg czynno�ci zostało zautomatyzowane, a o zagro�eniach informuje układ czujników i program steruj�cy komputera pokładowego oraz monitory, zamiast klasycznych przyrz�dów pokładowych.
Współczesny samolot to bezpieczny lot w trudnych warunkach, automatyczny pilota� na zadanym pułapie. To zautomatyzowane procedury zwi�zane z fazami lotu, jego rejestracj� i nawigacj�. We wszystkich tych układach mo�emy spotka� elementy systemów mechatronicznych.
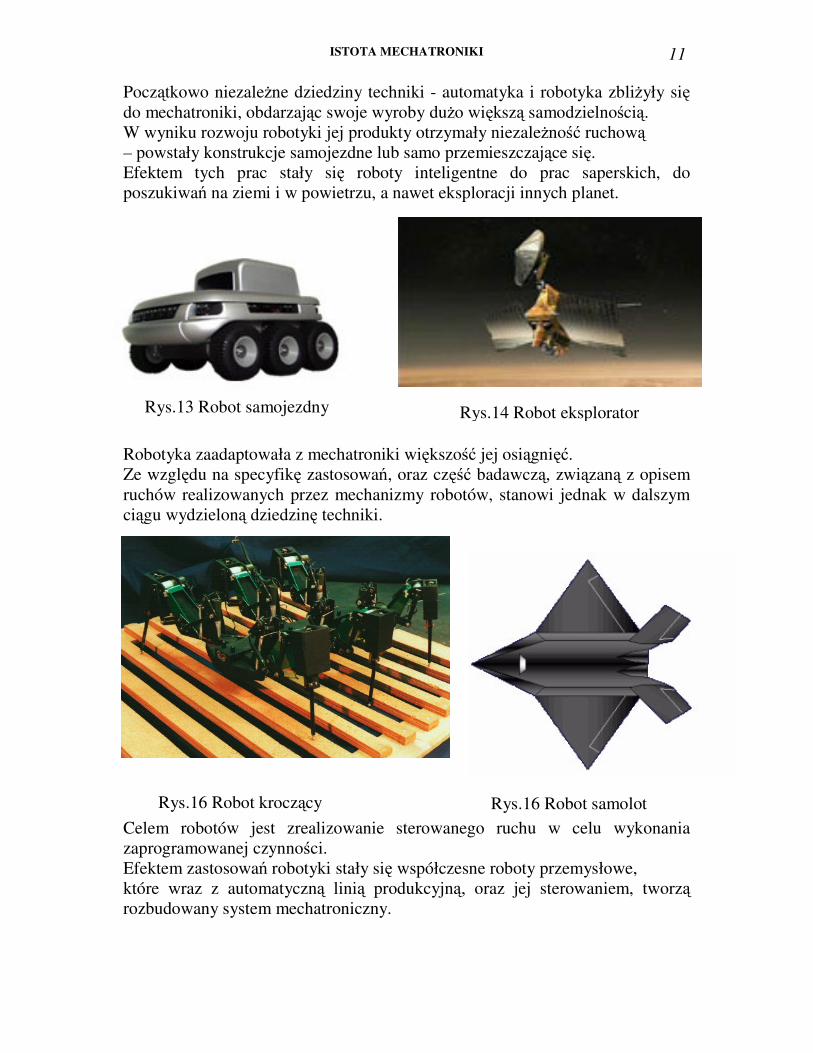
ISTOTA MECHATRONIKI 11 Pocz�tkowo niezale�ne dziedziny techniki - automatyka i robotyka zbli�yły si� do mechatroniki, obdarzaj�c swoje wyroby du�o wi�ksz� samodzielno�ci�. W wyniku rozwoju robotyki jej produkty otrzymały niezale�no�� ruchow� – powstały konstrukcje samojezdne lub samo przemieszczaj�ce si�. Efektem tych prac stały si� roboty inteligentne do prac saperskich, do poszukiwa� na ziemi i w powietrzu, a nawet eksploracji innych planet.
Robotyka zaadaptowała z mechatroniki wi�kszo�� jej osi�gni��. Ze wzgl�du na specyfik� zastosowa�, oraz cz��� badawcz�, zwi�zan� z opisem ruchów realizowanych przez mechanizmy robotów, stanowi jednak w dalszym ci�gu wydzielon� dziedzin� techniki.
Celem robotów jest zrealizowanie sterowanego ruchu w celu wykonania zaprogramowanej czynno�ci. Efektem zastosowa� robotyki stały si� współczesne roboty przemysłowe, które wraz z automatyczn� lini� produkcyjn�, oraz jej sterowaniem, tworz� rozbudowany system mechatroniczny.
Rys.13 Robot samojezdny Rys.14 Robot eksplorator
Rys.16 Robot samolot Rys.16 Robot krocz�cy

ISTOTA MECHATRONIKI 12
Rys.17
Rys.18
Rys.19
2.2.Budowa modułowa urz�dze� mechatronicznych Modułem – nazywamy zbiór elementów, wydzielony konstrukcyjnie i funkcjonalnie z obiektu, przeznaczony do realizacji okre�lonego zadania. Modułowo�� stanowi w chwili obecnej jedn� z podstawowych zasad konstrukcyjnych w projektowaniu i wykonawstwie nowych wyrobów. Zapewnia nam prosty monta� i demonta� wyrobu (zasada klocków), co ma znaczenie głównie w pracach konserwacyjno remontowych, oraz w systemach konstrukcyjnych, pozwalaj�cych na zestawianie produktów o ró�nych konfiguracjach działania. Przykładem modułowej budowy jest np.: - sprz�t komputerowy - układy pneumatyki - konstrukcje budowlane - elementy automatyki - nap�dy konstrukcji mechanicznych - typowe elementy konstrukcji
mechanicznych Przejawem modułowo�ci s� typoszeregi wymiarowe oferowanych produktów u�ytkowych i przemysłowych Obiekt zestawiony z modułów Moduły podstawowe
NAP�D UKŁAD WYKONAWCZY
CZUJNIK UKŁAD STERUJ�CY
NAP�D UKŁAD WYKONAWCZY
CZUJNIK UKŁAD STERUJ�CY

ISTOTA MECHATRONIKI 13
Rys.20
Rys.21
Warunkiem wydzielenia modułów jest ich odr�bno�� konstrukcyjna oraz zapewnienie łatwo�ci i pewno�ci wzajemnego monta�u. Dla typoszeregów produktów staramy si� zachowa�: - podobne gabaryty modułów - typowe podł�czenia czynników medialnych - typowe cz��ci zł�czne - łatwo�� okre�lenia sprawno�ci technicznej
(pkt. pomiarowe) Stosowanie modułowej budowy powoduje: - obni�enie kosztów wytwarzania (długie
serie) - obni�enie kosztów eksploatacji (na
drodze wymiany elementów niesprawnych)
- obni�enie kosztów remontu urz�dze� (naprawa wykonywana po za urz�dzeniem)
Stosowanie modułowej budowy jest stosowane w konstrukcji systemów mechatronicznych, co pozwala na ich uproszczenie i obni�k� kosztów produkcji. Modułowa budowa to nie tylko wyroby gotowe i podsystemy, lecz równie� takie elementy jak magistrale sygnałów: - elektrycznych - pneumatycznych - hydraulicznych - kable elektroniczne - korpusy zabudowy typowych elementów. Lokalizacja uszkodze� typowego urz�dzenia, o budowie modułowej, polega na realizacji kolejnych kroków, niezb�dnych do zlokalizowania i okre�lenia usterki. Nale�� do nich: - okre�lenie ilo�ci i rodzaju modułów - okre�lenie czynników medialnych - okre�lenie funkcji odpowiedzialnej za
niesprawno�� - okre�lenie odpowiedzialnego modułu - znalezienie punktów pomiarowych - sprawdzenie parametrów - wymiana modułu Pokazana wy�ej procedura jest niezb�dna, zwłaszcza dla układów mechatronicznych o wysokim stopniu komplikacji i du�ej ilo�ci elementów składowych
ISTOTA MECHATRONIKI 14
Rys.22
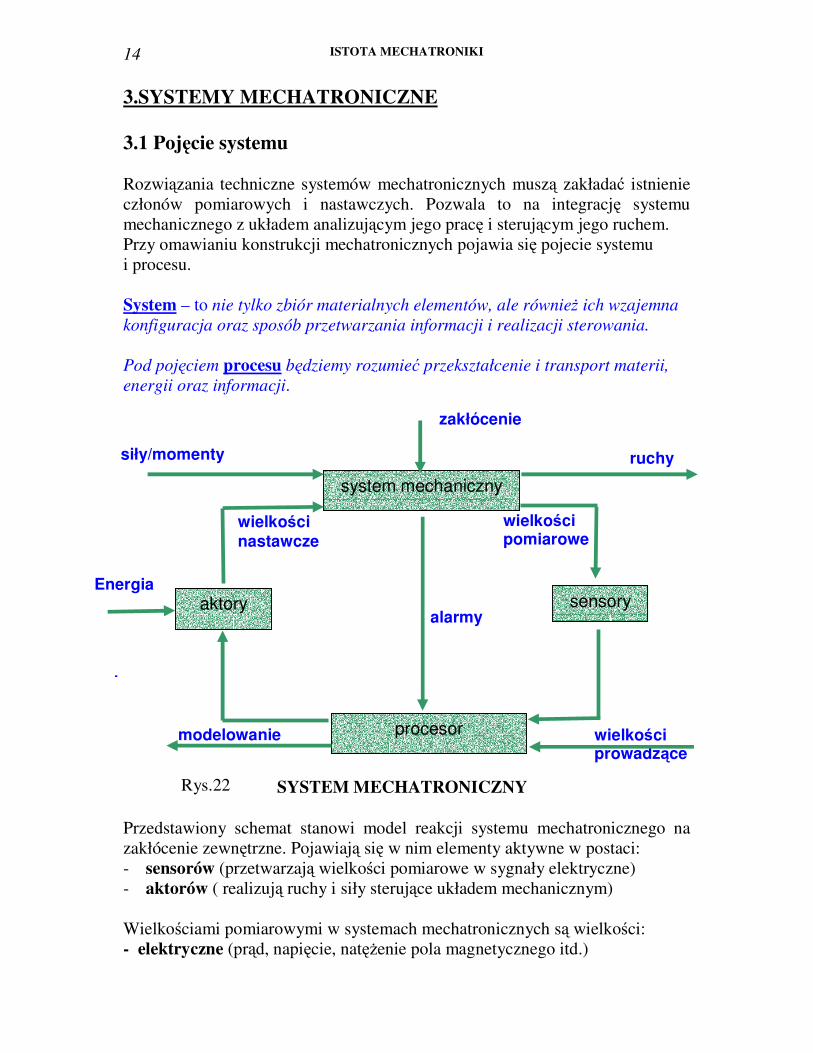
3.SYSTEMY MECHATRONICZNE 3.1 Poj�cie systemu Rozwi�zania techniczne systemów mechatronicznych musz� zakłada� istnienie członów pomiarowych i nastawczych. Pozwala to na integracj� systemu mechanicznego z układem analizuj�cym jego prac� i steruj�cym jego ruchem. Przy omawianiu konstrukcji mechatronicznych pojawia si� pojecie systemu i procesu. System – to nie tylko zbiór materialnych elementów, ale równie� ich wzajemna konfiguracja oraz sposób przetwarzania informacji i realizacji sterowania. Pod poj�ciem procesu b�dziemy rozumie� przekształcenie i transport materii, energii oraz informacji.
Przedstawiony schemat stanowi model reakcji systemu mechatronicznego na zakłócenie zewn�trzne. Pojawiaj� si� w nim elementy aktywne w postaci: - sensorów (przetwarzaj� wielko�ci pomiarowe w sygnały elektryczne) - aktorów ( realizuj� ruchy i siły steruj�ce układem mechanicznym) Wielko�ciami pomiarowymi w systemach mechatronicznych s� wielko�ci: - elektryczne (pr�d, napi�cie, nat��enie pola magnetycznego itd.)
wielko�ci prowadz�ce
sygnały
zakłócenie
system mechaniczny
sensory aktory
procesor modelowanie
Energia pomocnic
wielko�ci nastawcze
wielko�ci pomiarowe
alarmy
ruchy siły/momentymodelowanie
sygnały
SYSTEM MECHATRONICZNY
ISTOTA MECHATRONIKI 15
Rys.23
Rys.24
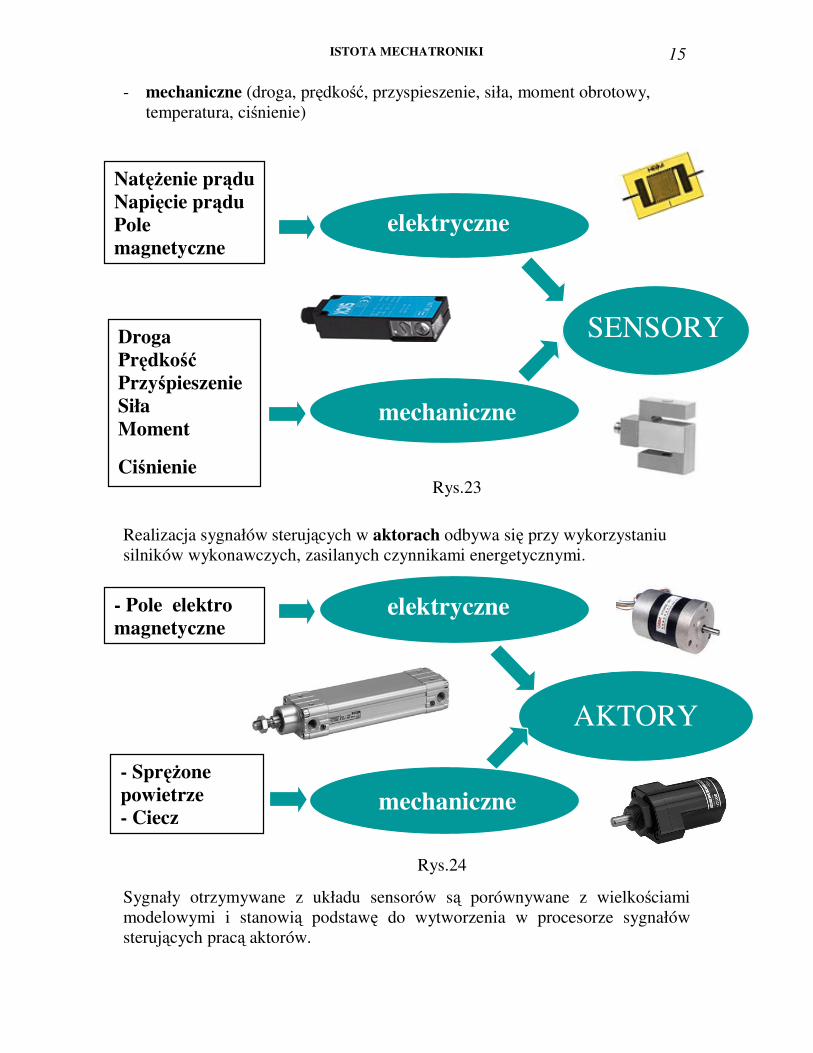
- mechaniczne (droga, pr�dko��, przyspieszenie, siła, moment obrotowy,
temperatura, ci�nienie) -
Realizacja sygnałów steruj�cych w aktorach odbywa si� przy wykorzystaniu silników wykonawczych, zasilanych czynnikami energetycznymi.
Sygnały otrzymywane z układu sensorów s� porównywane z wielko�ciami modelowymi i stanowi� podstaw� do wytworzenia w procesorze sygnałów steruj�cych prac� aktorów.
- Pole elektro magnetyczne
- Spr��one powietrze - Ciecz
AKTORY
elektryczne
mechaniczne
Nat��enie pr�du Napi�cie pr�du Pole magnetyczne
Droga Pr�dko Przypieszenie Siła Moment
Cinienie
SENSORY
elektryczne
mechaniczne
ISTOTA MECHATRONIKI 16
Rys.25
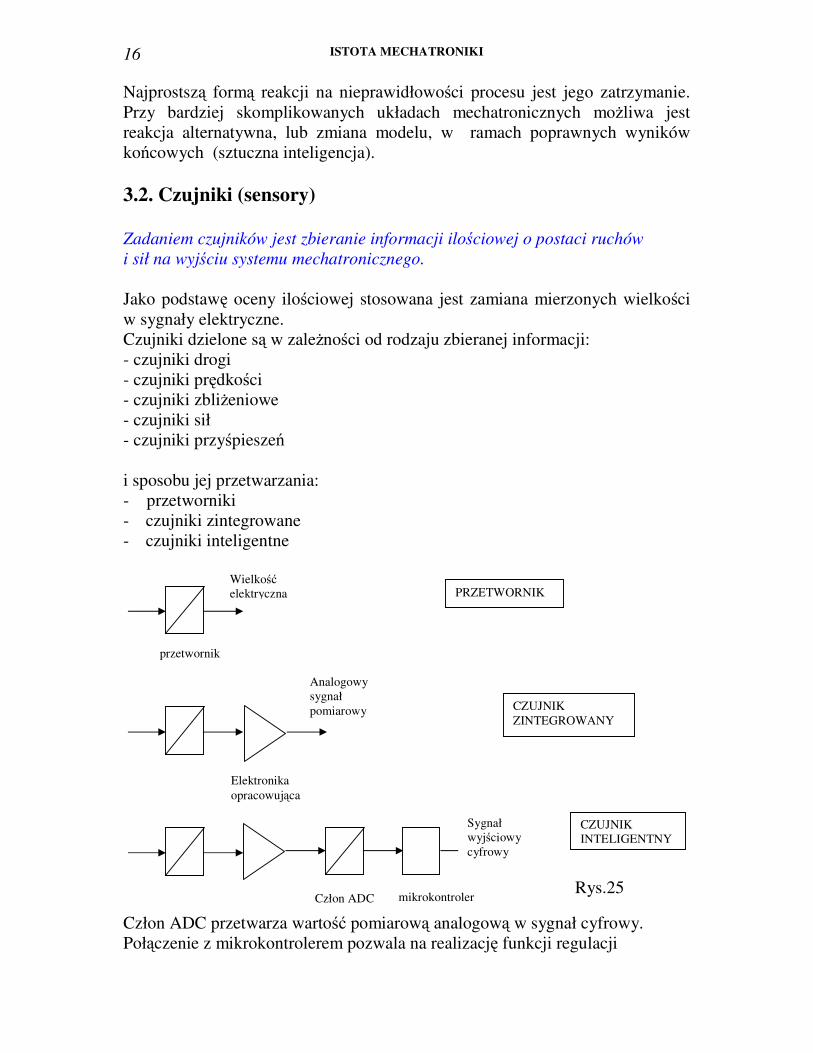
Najprostsz� form� reakcji na nieprawidłowo�ci procesu jest jego zatrzymanie. Przy bardziej skomplikowanych układach mechatronicznych mo�liwa jest reakcja alternatywna, lub zmiana modelu, w ramach poprawnych wyników ko�cowych (sztuczna inteligencja). 3.2. Czujniki (sensory) Zadaniem czujników jest zbieranie informacji ilo�ciowej o postaci ruchów i sił na wyj�ciu systemu mechatronicznego. Jako podstaw� oceny ilo�ciowej stosowana jest zamiana mierzonych wielko�ci w sygnały elektryczne. Czujniki dzielone s� w zale�no�ci od rodzaju zbieranej informacji: - czujniki drogi - czujniki pr�dko�ci - czujniki zbli�eniowe - czujniki sił - czujniki przy�piesze� i sposobu jej przetwarzania: - przetworniki - czujniki zintegrowane - czujniki inteligentne
Człon ADC przetwarza warto�� pomiarow� analogow� w sygnał cyfrowy. Poł�czenie z mikrokontrolerem pozwala na realizacj� funkcji regulacji
przetwornik
Elektronika opracowuj�ca
Człon ADC mikrokontroler
Wielko�� elektryczna
Analogowy sygnał pomiarowy
Sygnał wyj�ciowy cyfrowy
PRZETWORNIK
CZUJNIK ZINTEGROWANY
CZUJNIK INTELIGENTNY
ISTOTA MECHATRONIKI 17
Rys.26
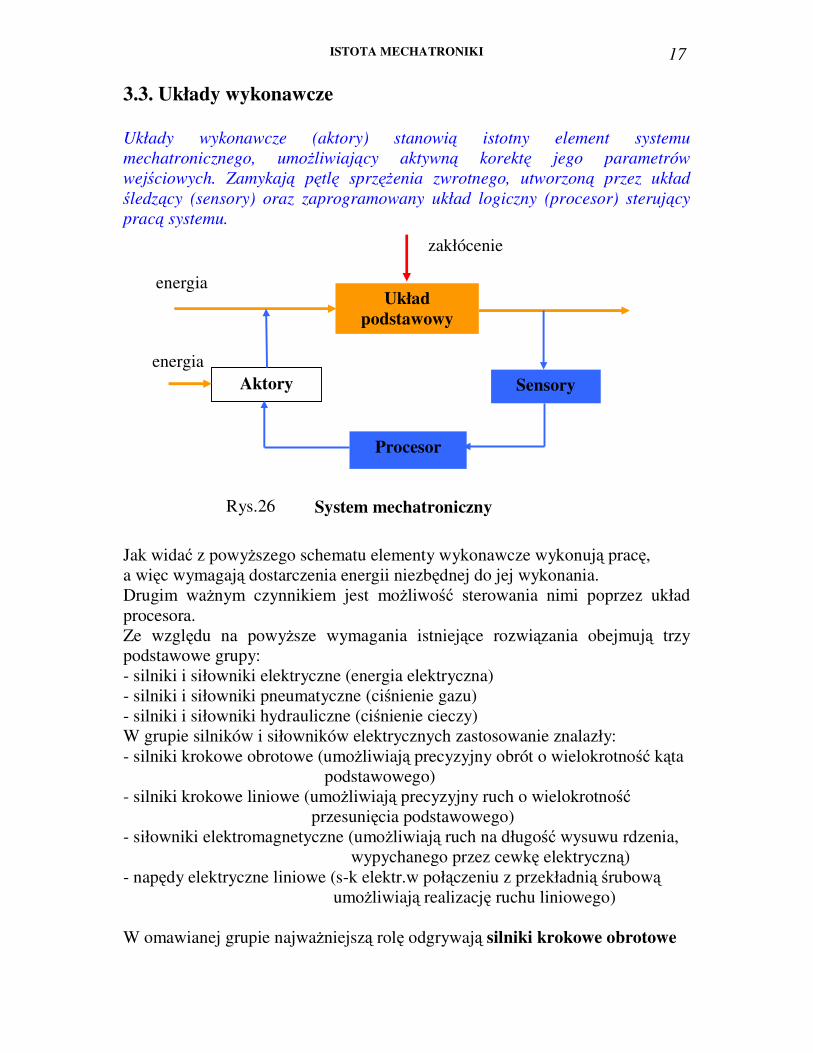
3.3. Układy wykonawcze Układy wykonawcze (aktory) stanowi� istotny element systemu mechatronicznego, umo�liwiaj�cy aktywn� korekt� jego parametrów wej�ciowych. Zamykaj� p�tl� sprz��enia zwrotnego, utworzon� przez układ �ledz�cy (sensory) oraz zaprogramowany układ logiczny (procesor) steruj�cy prac� systemu. Jak wida� z powy�szego schematu elementy wykonawcze wykonuj� prac�, a wi�c wymagaj� dostarczenia energii niezb�dnej do jej wykonania. Drugim wa�nym czynnikiem jest mo�liwo�� sterowania nimi poprzez układ procesora. Ze wzgl�du na powy�sze wymagania istniej�ce rozwi�zania obejmuj� trzy podstawowe grupy: - silniki i siłowniki elektryczne (energia elektryczna) - silniki i siłowniki pneumatyczne (ci�nienie gazu) - silniki i siłowniki hydrauliczne (ci�nienie cieczy) W grupie silników i siłowników elektrycznych zastosowanie znalazły: - silniki krokowe obrotowe (umo�liwiaj� precyzyjny obrót o wielokrotno�� k�ta podstawowego) - silniki krokowe liniowe (umo�liwiaj� precyzyjny ruch o wielokrotno�� przesuni�cia podstawowego) - siłowniki elektromagnetyczne (umo�liwiaj� ruch na długo�� wysuwu rdzenia, wypychanego przez cewk� elektryczn�) - nap�dy elektryczne liniowe (s-k elektr.w poł�czeniu z przekładni� �rubow� umo�liwiaj� realizacj� ruchu liniowego) W omawianej grupie najwa�niejsz� rol� odgrywaj� silniki krokowe obrotowe
Układ podstawowy
Sensory
Procesor
Aktory
zakłócenie
energia
energia
System mechatroniczny
ISTOTA MECHATRONIKI 18
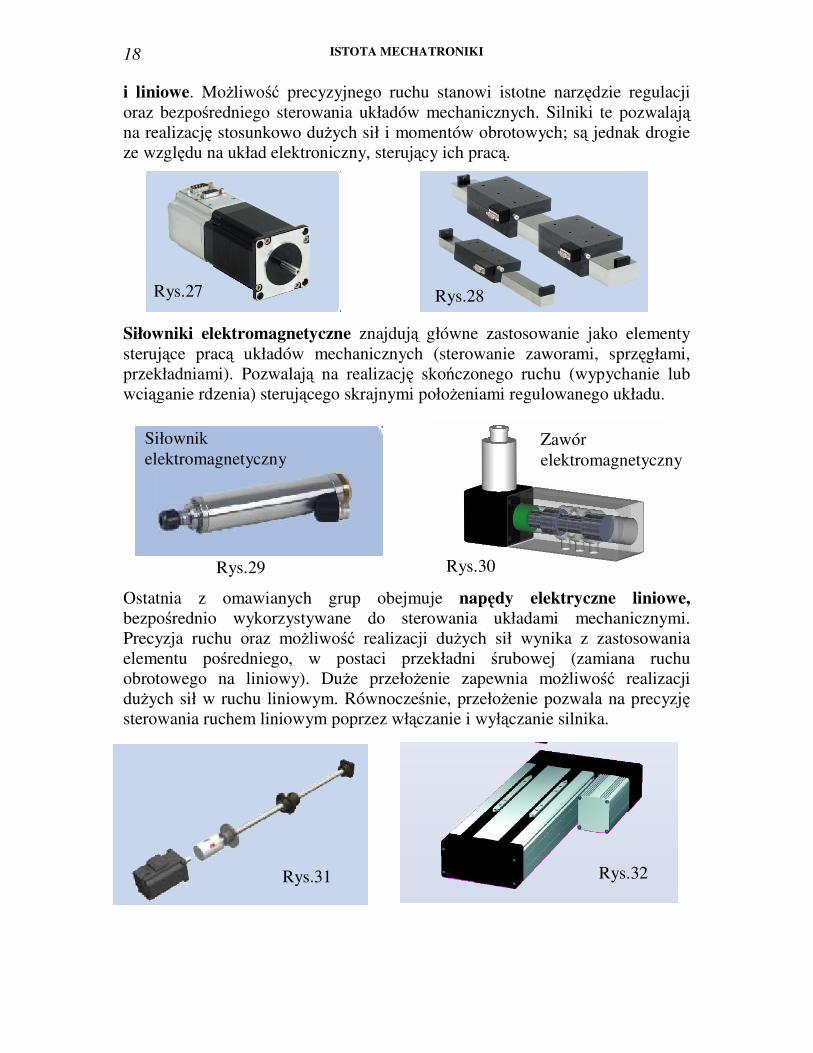
Rys.27 Rys.28
Rys.29 Rys.30
Rys.31 Rys.32
i liniowe. Mo�liwo�� precyzyjnego ruchu stanowi istotne narz�dzie regulacji oraz bezpo�redniego sterowania układów mechanicznych. Silniki te pozwalaj� na realizacj� stosunkowo du�ych sił i momentów obrotowych; s� jednak drogie ze wzgl�du na układ elektroniczny, steruj�cy ich prac�. Siłowniki elektromagnetyczne znajduj� główne zastosowanie jako elementy steruj�ce prac� układów mechanicznych (sterowanie zaworami, sprz�głami, przekładniami). Pozwalaj� na realizacj� sko�czonego ruchu (wypychanie lub wci�ganie rdzenia) steruj�cego skrajnymi poło�eniami regulowanego układu. Ostatnia z omawianych grup obejmuje nap�dy elektryczne liniowe, bezpo�rednio wykorzystywane do sterowania układami mechanicznymi. Precyzja ruchu oraz mo�liwo�� realizacji du�ych sił wynika z zastosowania elementu po�redniego, w postaci przekładni �rubowej (zamiana ruchu obrotowego na liniowy). Du�e przeło�enie zapewnia mo�liwo�� realizacji du�ych sił w ruchu liniowym. Równocze�nie, przeło�enie pozwala na precyzj� sterowania ruchem liniowym poprzez wł�czanie i wył�czanie silnika.
Zawór elektromagnetyczny
Siłownik elektromagnetyczny

ISTOTA MECHATRONIKI 19
Rys.33
Rys.34
Silniki i siłowniki pneumatyczne stanowi� jedn� z najpowszechniej stosowanych grup elementów wykonawczych. Zwarta budowa, realizacja du�ych sił, regulacja pr�dko�ci ruchu, proste sterowanie – to główne cechy elementów tej grupy. W ich pracy wykorzystywana jest energia spr��onego powietrza, uzyskiwanego za po�rednictwem spr��arki. Stosunkowo niskie ci�nienie pracy (6-7 bar) ułatwia ł�czenie pomi�dzy sob� elementów instalacji. Podstawowymi elementami wykonawczymi s� siłowniki liniowe i obrotowe oraz silniki pneumatyczne. Elementy wykonawcze pneumatyczne znajduj� zastosowanie nie tylko w systemach mechatronicznych ale równie� jako nap�d układów mechanicznych. Pneumatyczne wiertarki, szlifierki, klucze - to typowa grupa narz�dzi stosowanych w przemy�le i nap�dzanych silnikami pneumatycznymi. Równie� pneumatyczne siłowniki liniowe to podstawowy element nap�dowy współczesnych automatycznych linii produkcyjnych. Ostatnia grupa silników i siłowników hydraulicznych to równie� nie tylko elementy steruj�ce, ale przede wszystkim �ródło nap�du, pozwalaj�ce na realizacj� bardzo du�ych sił w układach mechanicznych maszyn. Wyst�puj� tu elementy podobne do tych stosowanych w układach pneumatyki. Zmienia si� jednak ich wielko��, ci��ar i konstrukcja podłacze�. Czynnikiem roboczym w układach hydraulicznych jest ciecz pod ci�nieniem 10-30MPa. Silniki i siłowniki hydrauliczne stosowane s� w nap�dach maszyn budowlanych i wydobywczych, w konstrukcjach jezdnych, ale równie� jako elementy steruj�ce, wymagaj�ce du�ych sił i precyzji ruchu.
Siłowniki Silniki
ISTOTA MECHATRONIKI 20
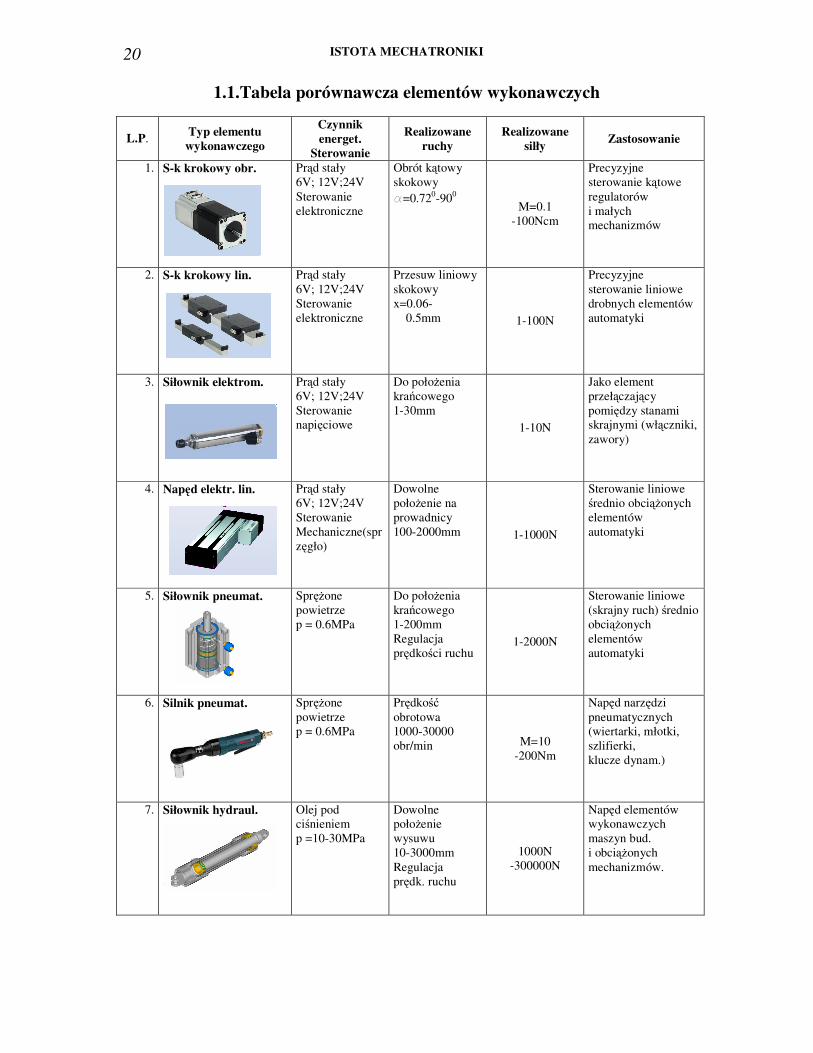
1.1.Tabela porównawcza elementów wykonawczych
L.P. Typ elementu wykonawczego
Czynnik energet.
Sterowanie
Realizowane ruchy
Realizowane silły Zastosowanie
1. S-k krokowy obr.
Pr�d stały 6V; 12V;24V Sterowanie elektroniczne
Obrót k�towy skokowy �=0.720-900
M=0.1 -100Ncm
Precyzyjne sterowanie k�towe regulatorów i małych mechanizmów
2. S-k krokowy lin. Pr�d stały 6V; 12V;24V Sterowanie elektroniczne
Przesuw liniowy skokowy x=0.06- 0.5mm 1-100N
Precyzyjne sterowanie liniowe drobnych elementów automatyki
3. Siłownik elektrom. Pr�d stały 6V; 12V;24V Sterowanie napi�ciowe
Do poło�enia kra�cowego 1-30mm
1-10N
Jako element przeł�czaj�cy pomi�dzy stanami skrajnymi (wł�czniki, zawory)
4. Nap�d elektr. lin. Pr�d stały 6V; 12V;24V Sterowanie Mechaniczne(sprz�gło)
Dowolne poło�enie na prowadnicy 100-2000mm 1-1000N
Sterowanie liniowe �rednio obci��onych elementów automatyki
5. Siłownik pneumat. Spr��one powietrze p = 0.6MPa
Do poło�enia kra�cowego 1-200mm Regulacja pr�dko�ci ruchu
1-2000N
Sterowanie liniowe (skrajny ruch) �rednio obci��onych elementów automatyki
6. Silnik pneumat. Spr��one powietrze p = 0.6MPa
Pr�dko�� obrotowa 1000-30000 obr/min M=10
-200Nm
Nap�d narz�dzi pneumatycznych (wiertarki, młotki, szlifierki, klucze dynam.)
7. Siłownik hydraul. Olej pod ci�nieniem p =10-30MPa
Dowolne poło�enie wysuwu 10-3000mm Regulacja pr�dk. ruchu
1000N -300000N
Nap�d elementów wykonawczych maszyn bud. i obci��onych mechanizmów.
ISTOTA MECHATRONIKI 21
Rys.35
Rys.36
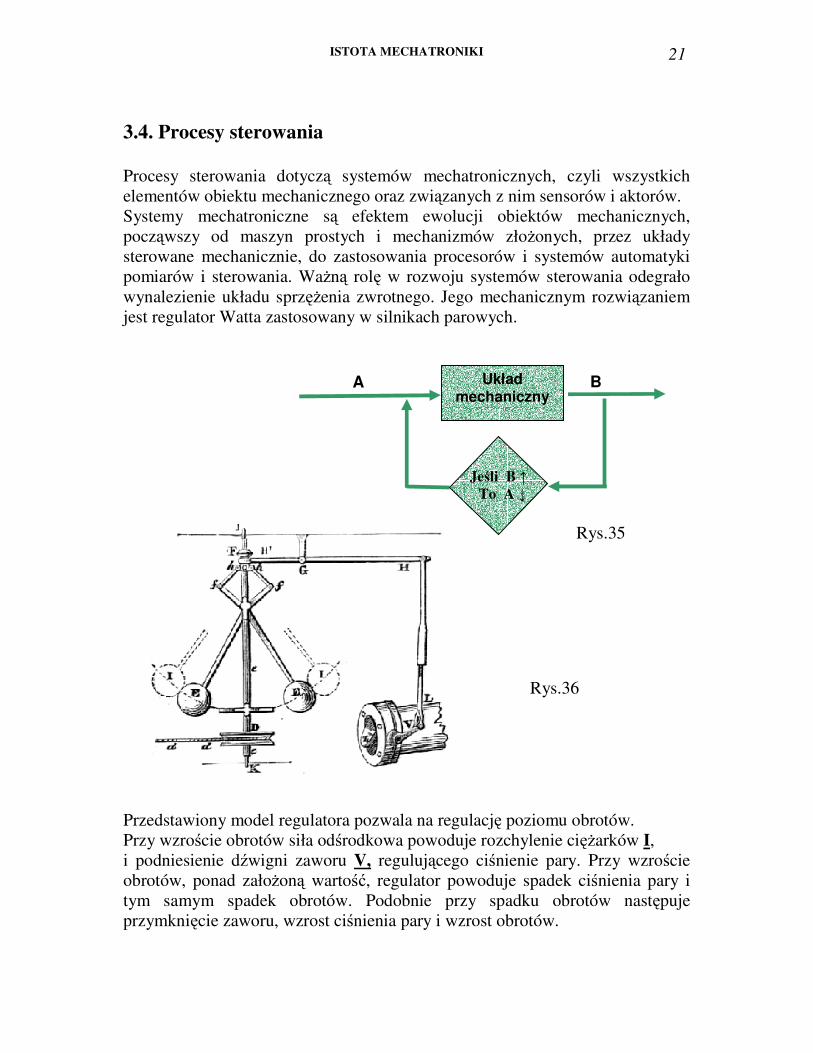
3.4. Procesy sterowania Procesy sterowania dotycz� systemów mechatronicznych, czyli wszystkich elementów obiektu mechanicznego oraz zwi�zanych z nim sensorów i aktorów. Systemy mechatroniczne s� efektem ewolucji obiektów mechanicznych, pocz�wszy od maszyn prostych i mechanizmów zło�onych, przez układy sterowane mechanicznie, do zastosowania procesorów i systemów automatyki pomiarów i sterowania. Wa�n� rol� w rozwoju systemów sterowania odegrało wynalezienie układu sprz��enia zwrotnego. Jego mechanicznym rozwi�zaniem jest regulator Watta zastosowany w silnikach parowych.
Przedstawiony model regulatora pozwala na regulacj� poziomu obrotów. Przy wzro�cie obrotów siła od�rodkowa powoduje rozchylenie ci��arków I, i podniesienie d�wigni zaworu V, reguluj�cego ci�nienie pary. Przy wzro�cie obrotów, ponad zało�on� warto��, regulator powoduje spadek ci�nienia pary i tym samym spadek obrotów. Podobnie przy spadku obrotów nast�puje przymkni�cie zaworu, wzrost ci�nienia pary i wzrost obrotów.
Układ mechaniczny
B
Jeli B � To A �
A
ISTOTA MECHATRONIKI 22
Rys.37
Rys.38
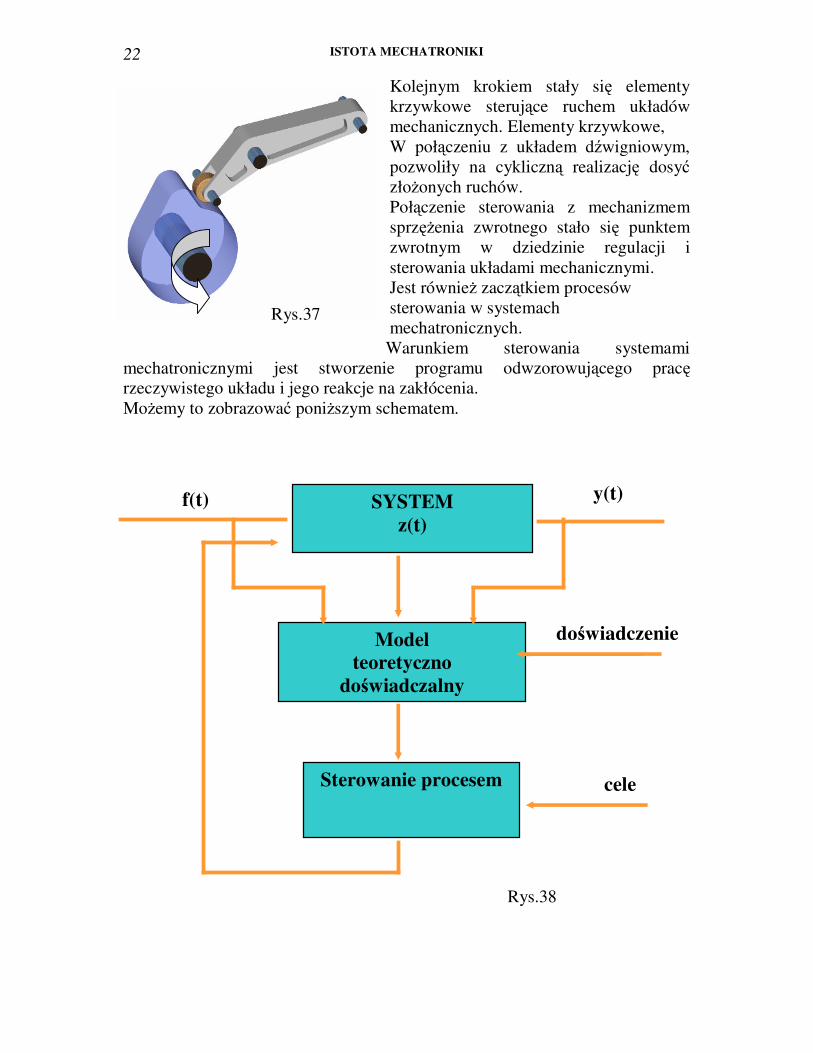
Kolejnym krokiem stały si� elementy krzywkowe steruj�ce ruchem układów mechanicznych. Elementy krzywkowe, W poł�czeniu z układem d�wigniowym, pozwoliły na cykliczn� realizacj� dosy� zło�onych ruchów. Poł�czenie sterowania z mechanizmem sprz��enia zwrotnego stało si� punktem zwrotnym w dziedzinie regulacji i sterowania układami mechanicznymi. Jest równie� zacz�tkiem procesów sterowania w systemach mechatronicznych.
Warunkiem sterowania systemami mechatronicznymi jest stworzenie programu odwzorowuj�cego prac� rzeczywistego układu i jego reakcje na zakłócenia. Mo�emy to zobrazowa� poni�szym schematem.
SYSTEM z(t)
Model teoretyczno
dowiadczalny
Sterowanie procesem cele
dowiadczenieie
y(t) f(t)
ISTOTA MECHATRONIKI 23
Rys.39
Rys.40
Jak wida� stworzenie modelu jest procesem zło�onym i opiera si� nie tylko na matematycznym opisie, ale równie� na do�wiadczeniach, pozwalaj�cych wnie�� do niego odpowiednie współczynniki, zapewniaj�ce zgodno�� z rzeczywistymi reakcjami systemu.
ISTOTA MECHATRONIKI 24
Rys.41
Rys.42
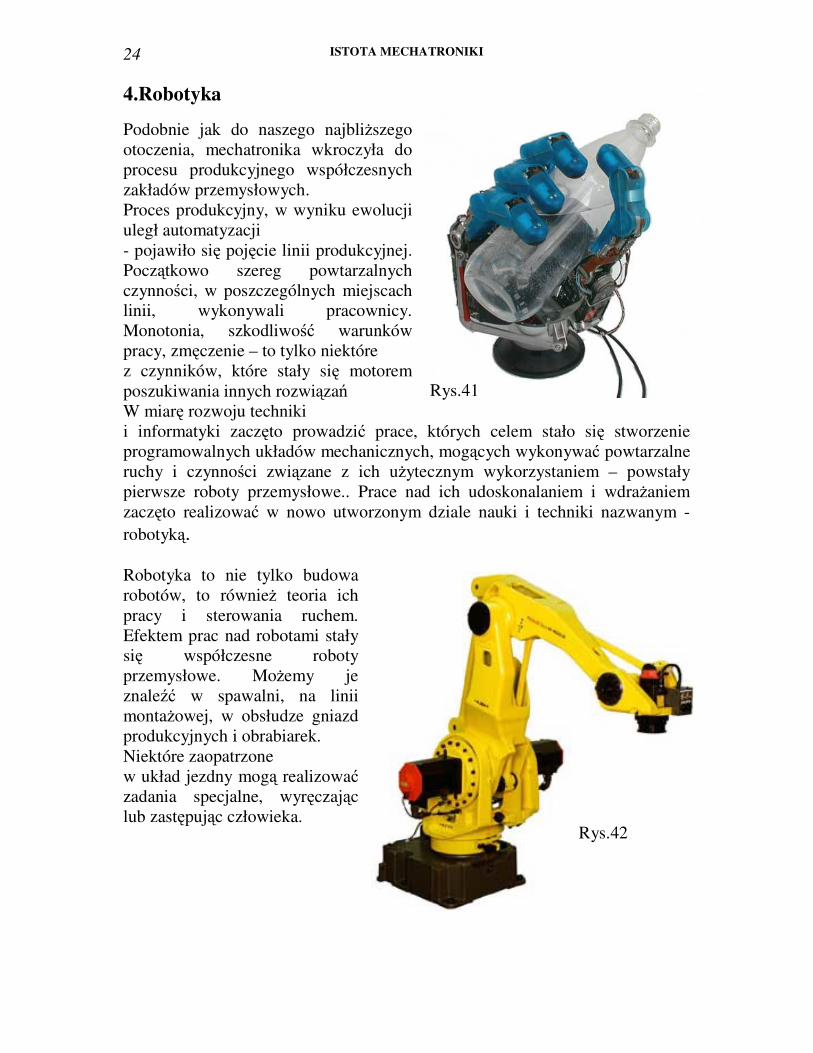
4.Robotyka
Podobnie jak do naszego najbli�szego otoczenia, mechatronika wkroczyła do procesu produkcyjnego współczesnych zakładów przemysłowych. Proces produkcyjny, w wyniku ewolucji uległ automatyzacji - pojawiło si� poj�cie linii produkcyjnej. Pocz�tkowo szereg powtarzalnych czynno�ci, w poszczególnych miejscach linii, wykonywali pracownicy. Monotonia, szkodliwo�� warunków pracy, zm�czenie – to tylko niektóre z czynników, które stały si� motorem poszukiwania innych rozwi�za� W miar� rozwoju techniki i informatyki zacz�to prowadzi� prace, których celem stało si� stworzenie programowalnych układów mechanicznych, mog�cych wykonywa� powtarzalne ruchy i czynno�ci zwi�zane z ich u�ytecznym wykorzystaniem – powstały pierwsze roboty przemysłowe.. Prace nad ich udoskonalaniem i wdra�aniem zacz�to realizowa� w nowo utworzonym dziale nauki i techniki nazwanym - robotyk�. Robotyka to nie tylko budowa robotów, to równie� teoria ich pracy i sterowania ruchem. Efektem prac nad robotami stały si� współczesne roboty przemysłowe. Mo�emy je znale�� w spawalni, na linii monta�owej, w obsłudze gniazd produkcyjnych i obrabiarek. Niektóre zaopatrzone w układ jezdny mog� realizowa� zadania specjalne, wyr�czaj�c lub zast�puj�c człowieka.
ISTOTA MECHATRONIKI 25
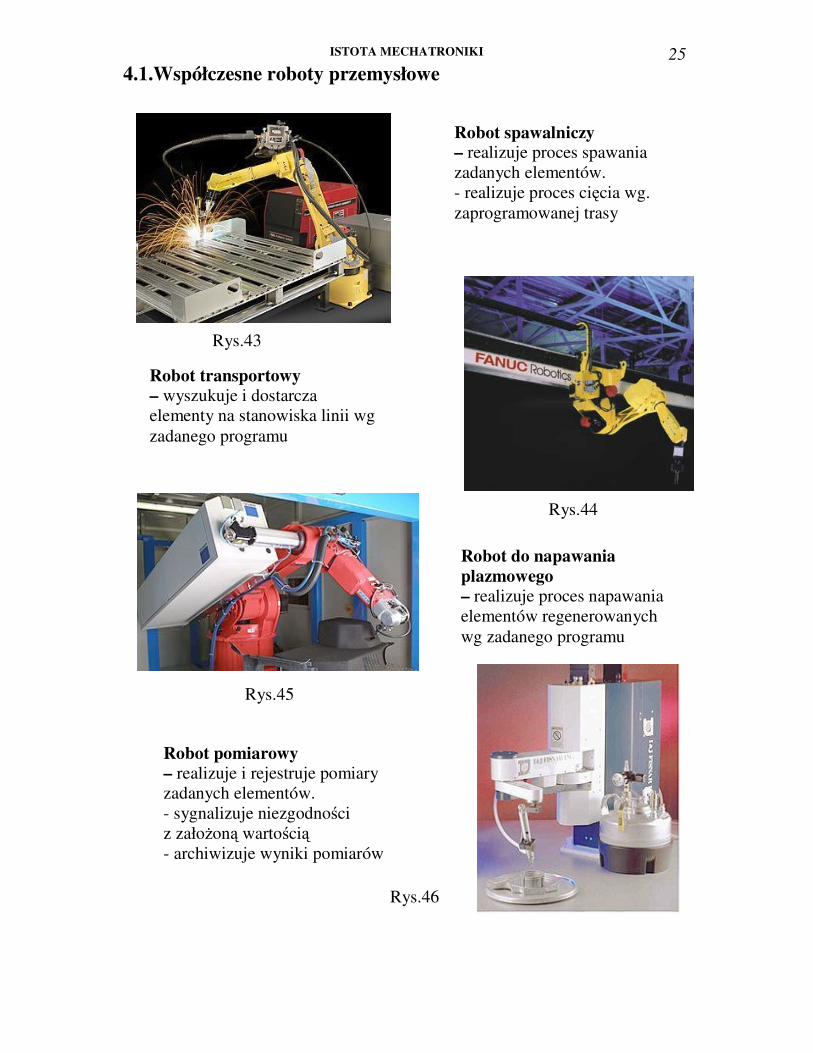
Robot pomiarowy – realizuje i rejestruje pomiary zadanych elementów. - sygnalizuje niezgodno�ci z zało�on� warto�ci� - archiwizuje wyniki pomiarów
Robot do napawania plazmowego – realizuje proces napawania elementów regenerowanych wg zadanego programu
Robot transportowy – wyszukuje i dostarcza elementy na stanowiska linii wg zadanego programu
Robot spawalniczy – realizuje proces spawania zadanych elementów. - realizuje proces ci�cia wg. zaprogramowanej trasy
Rys.43
Rys.44
Rys.45
Rys.46
4.1.Współczesne roboty przemysłowe

ISTOTA MECHATRONIKI 26
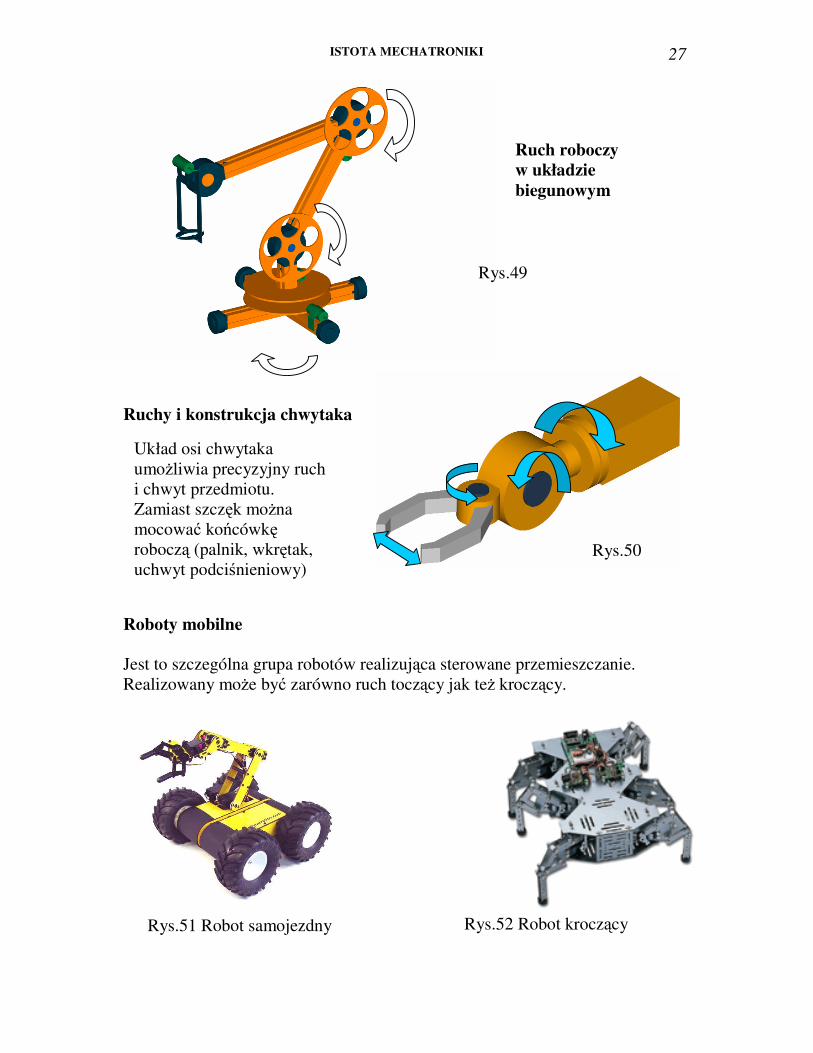
Ruch roboczy w układzie współrz�dnociowym
Ruch roboczy w układzie sferycznym
Rys.47
Rys.48
4.2.Realizacja ruchów mechanizmów robotów Celem robotów jest zrealizowanie sterowanego ruchu w celu wykonania zaprogramowanej czynno�ci. Zakres czynno�ci obejmuje chwytanie i przemieszczanie przedmiotów i półfabrykatów produkcyjnych. Ruch robotów mo�emy, wi�c podzieli� na: - ruch chwytaka - ruch roboczy mechanizmu Ruch chwytaka zazwyczaj na�laduje przegub r�ki, umo�liwiaj�c funkcj� chwytania z regulowana sił� oraz obrót wokół 3 osi, cz��ci chwytaj�cej. Ruch roboczy mo�e by� realizowany w trzech podstawowych układach: - w układzie współrz�dno�ciowym (ruchy wzdłu� trzech wzajemnie prostopadłych osi x,y,z) - w układzie biegunowym (zmianie ulega poło�enie promienia wodz�cego, pomi�dzy chwytakiem i punktem obrotu podstawy robota) - w układzie sferycznym (ruch chwytaka po promieniu sfery)
ISTOTA MECHATRONIKI 27
Ruch roboczy w układzie biegunowym
Ruchy i konstrukcja chwytaka Roboty mobilne Jest to szczególna grupa robotów realizuj�ca sterowane przemieszczanie. Realizowany mo�e by� zarówno ruch tocz�cy jak te� krocz�cy.
Układ osi chwytaka umo�liwia precyzyjny ruch i chwyt przedmiotu. Zamiast szcz�k mo�na mocowa� ko�cówk� robocz� (palnik, wkr�tak, uchwyt podci�nieniowy)
Rys.51 Robot samojezdny Rys.52 Robot krocz�cy
Rys.49
Rys.50

ISTOTA MECHATRONIKI 28
Rys.53
4.3.Linia produkcyjna
Poj�cie linii produkcyjnej pojawiło si� w wyniku ewolucji metod produkcji i monta�u wyrobów u�ytkowych. Konieczno�� obni�enia kosztów wi�zała si� z niezb�dnym wzrostem produkcji. Nowa metoda produkcji dotyczyła zmechanizowania procesów wytwarzania i monta�u. Tak jak wspomniałem na wst�pie nowa metoda opierała si� na efektywniejszym wykorzystaniu pracowników, poprzez zmian� organizacji pracy. Pojawiło si� poj�cie linii technologicznej, produkcji potokowej, transportu wewn�trznego, automatyzacji maszyn wytwórczych. W miar� dalszego rozwoju miejsce pracowników zacz�ły zajmowa� wyspecjalizowane maszyny oraz roboty przemysłowe. Równie� transport wyrobów montowanych na linii produkcyjnej uległ zmechanizowaniu i zautomatyzowaniu. Znaczne skomplikowanie automatycznych linii produkcyjnych wymaga stosowania znacznej ilo�ci czujników parametrów ruchu i poprawno�ci wykonywanych operacji. Du�a ilo�� informacji oraz konieczno�� szybkiej interwencji wymaga zastosowania centrów przetwarzania danych oraz programów steruj�cych procesem. Jak widzimy współczesna linia produkcyjna staje si� systemem mechatronicznym o znacznym stopniu komplikacji. W jej skład wchodz� mi�dzy innymi: - układ mechaniczny transportu mi�dzy operacyjnego - układ pneumatyczny i hydrauliczny realizacji i korekty ruchów - układ czujników parametrów ruchu - układ czujników parametrów procesów wytwarzania - układ czujników analizy pomiarowej (kontroli produkcji) - układ poł�cze� elektrycznych - układ zasilania elektrycznego - układ wytwarzania mediów roboczych - układ zbierania i przetwarzania danych - układ steruj�cy Tak rozbudowany system wymaga bie��cej kontroli i prac zabezpieczaj�cych jego bezawaryjne działanie. W dalszym ci�gu niezb�dny jest czynnik ludzki, jednak od pracowników wymaga si� bardzo wysokich kwalifikacji i umiej�tno�ci zawodowych.
ISTOTA MECHATRONIKI 29
Rys.54
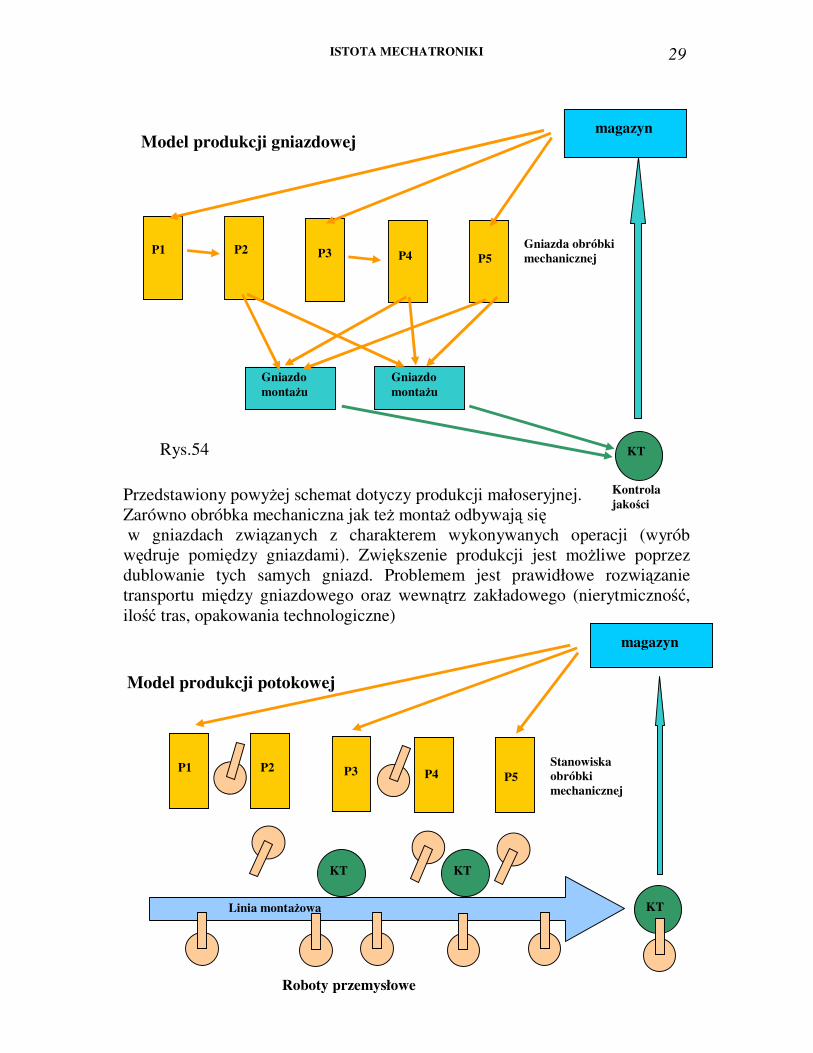
Przedstawiony powy�ej schemat dotyczy produkcji małoseryjnej. Zarówno obróbka mechaniczna jak te� monta� odbywaj� si� w gniazdach zwi�zanych z charakterem wykonywanych operacji (wyrób w�druje pomi�dzy gniazdami). Zwi�kszenie produkcji jest mo�liwe poprzez dublowanie tych samych gniazd. Problemem jest prawidłowe rozwi�zanie transportu mi�dzy gniazdowego oraz wewn�trz zakładowego (nierytmiczno��, ilo�� tras, opakowania technologiczne)
Linia monta�owa
magazyn
Roboty przemysłowe
Stanowiska obróbki mechanicznej
P5 P4 P3 P2 P1
KT
KT KT
Model produkcji gniazdowej
Model produkcji potokowej
Gniazdo monta�u
magazyn
Kontrola jakoci
Gniazda obróbki mechanicznej P5 P4 P3 P2 P1
KT
Gniazdo monta�u
ISTOTA MECHATRONIKI 30
Rys.55
Rys.56
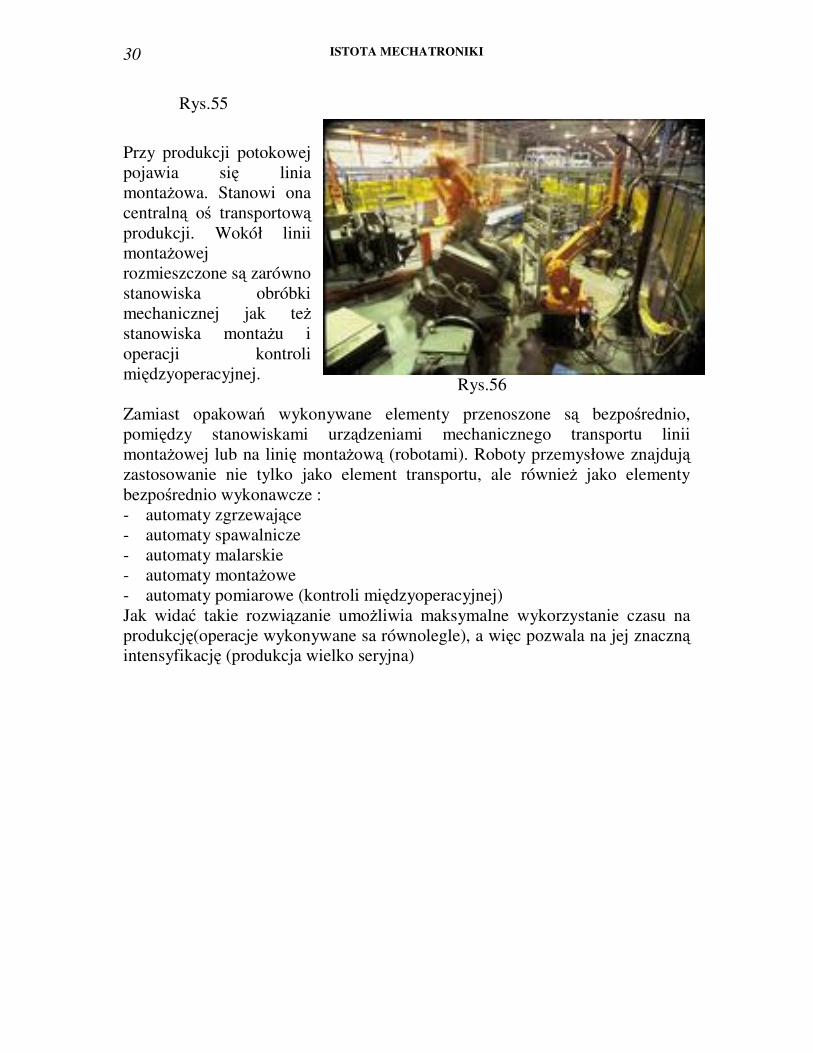
Przy produkcji potokowej pojawia si� linia monta�owa. Stanowi ona centraln� o� transportow� produkcji. Wokół linii monta�owej rozmieszczone s� zarówno stanowiska obróbki mechanicznej jak te� stanowiska monta�u i operacji kontroli mi�dzyoperacyjnej. Zamiast opakowa� wykonywane elementy przenoszone s� bezpo�rednio, pomi�dzy stanowiskami urz�dzeniami mechanicznego transportu linii monta�owej lub na lini� monta�ow� (robotami). Roboty przemysłowe znajduj� zastosowanie nie tylko jako element transportu, ale równie� jako elementy bezpo�rednio wykonawcze : - automaty zgrzewaj�ce - automaty spawalnicze - automaty malarskie - automaty monta�owe - automaty pomiarowe (kontroli mi�dzyoperacyjnej) Jak wida� takie rozwi�zanie umo�liwia maksymalne wykorzystanie czasu na produkcj�(operacje wykonywane sa równolegle), a wi�c pozwala na jej znaczn� intensyfikacj� (produkcja wielko seryjna)
ISTOTA MECHATRONIKI 31 Pytania: 1.Jakie cechy charakteryzuj� konstrukcj� mechatroniczn�? 2.Podaj definicj� poj�cia mechatronika. 3. Gdzie stosowane s� konstrukcje mechatroniczne- podaj przykłady? 4.Na czym polega podobie�stwo systemów mechatronicznych do organizmów biologicznych? 5.Jak wyja�ni� poj�cie budowy modułowej? 6.Dlaczego w konstrukcji urz�dze� mechatronicznych stosowana jest budowa modułowa? 7.Z jakich podstawowych elementów składa si� system mechatroniczny? 8.Co oznaczaj� poj�cia: system i proces? 9. Jakie wielko�ci mierz� czujniki(sensory)? 10.Wymieni� podstawowe typy urz�dze� wykonawczych (aktorów)? 11.Jak dzielimy czujniki ze wzgl�du na sposób przetwarzania informacji? 12.W jakie czujniki musi by� wyposa�ona pralka automatyczna? 13.Jak działa ABS? 14.Co nazywamy robotyk�? 15.Jaka jest dziedzina zastosowa� robotów? 16.Jak mo�emy realizowa� ruchy robocze mechanizmów wykonawczych robotów? 17.Jakie ruchy wykonuje chwytak robota? 18.Omówi� model produkcji gniazdowej – kiedy jest stosowany? 19.Omówi� model produkcji potokowej – kiedy jest stosowany? 20.Wymieni� rodzaje robotów na linii monta�owej 21.Jakie elementy systemu mechatronicznego stosowane s� w liniach monta�owych?