Embed Size (px)
Citation preview
1
2
POLINOMIOS E INTERPOLACIÓN
OBJETIVO:
REALIZAR OPERACIONES CON POLINOMIOS E INTERPOLAR
DATOS UNIDIMENSIONALES, BIDIMENSIONALES Y
MULTIDIMENSIONALES.
CONTENIDO:
Interpolación polinomial.
Métodos de interpolación.
Funciones polinómicas y operaciones con polinomios.
Derivada de un polinomio.
Ajuste de curvas.
Expansión en fracciones parciales.
Interpolación unidimensional, bidimensional y multidimensional.
3
INTERPOLACIÓN POLINOMIAL
El objetivo principal de la interpolación polinomial es estimar los valores funcionales para
uno o más valores de la variable independiente desconocida, a partir de un conjunto de
datos discretos de una función dada, es así que a continuación se presenta una definición y
algunos métodos de interpolación.
Definición.- Dados 1n puntos de una función :f , un polinomio P de grado
menor o igual a n que pasa por cada uno de los 1n puntos dados, es llamado polinomio
interpolador de f .
En general el polinomio puede escribirse como:
1 2
1 2 1 0( ) ...n n
n nP x a x a x a x a x a
Proposición.- Dada una función :f , 0 1 2 ... nx x x x y 0 0( , )x y , 1 1( , )x y ,
2 2( , )x y , …, ( , )n nx y , 1n puntos distintos de f , existe exactamente un polinomio
( )P x de grado menor o igual a n que interpola a f .
Demostración. Supongamos que existen dos polinomios P y Q distintos que interpolan a
f .
4
Es decir:
( ) ( ), 0,1,..., .i if x P x i n y ( ) ( ), 0,1,..., .i if x Q x i n
Definamos ( ) ( ) ( )H x P x Q x ; el cual es de grado menor o igual a n .
Evaluando H en ix , para 0,1,..., .i n
( ) ( ) ( ) ( ) ( ) 0.i i i i iH x P x Q x f x f x
( ) 0.iH x , para 0,1,..., .i n
De donde se obtiene que H posee 1n raíces, dado que H es un polinomio de grado
menor o igual a n , esto contradice el Teorema Fundamental de Álgebra.
Por lo tanto, existe un único polinomio P que interpola a f .
Ejemplo:Dada una función :f y ( 1, 1) , (3 , 7) , puntos distintos de f
El polinomio de grado uno que interpola a estos datos, esto es:
( ) 2 1P x x .

5
MÉTODOS DE INTERPOLACIÓN
Método de Lagrange
Este método construye un polinomio interpoladorde orden n para 1n puntos dados en la
forma:
0 1 2 3 1 0 2 3
0 1 2 1
( ) ( )( )( )....( ) ( )( )( )....( )
... ( )( )( )....( ).
n n
n n
P x a x x x x x x x x a x x x x x x x x
a x x x x x x x x
Reemplazando los puntos dados en el polinomio se obtiene el valor de los coeficientes
00
0 1 0 2 0 3 0( )( )( )....( )n
ya
x x x x x x x x
11
1 0 1 2 1 3 1( )( )( )....( )n
ya
x x x x x x x x
22
2 0 2 1 2 3 2( )( )( )....( )n
ya
x x x x x x x x
…………
1 2 3 1( )( )( )....( )
nn
n n n n n
ya
x x x x x x x x
.
Ejemplo:Consideremos una función :f y (1, 2) , (3 ,1) , (5 , 4) ,puntos distintos
de f .
Construyamos el polinomio
0 1 2( ) ( 3)( 5) ( 1)( 5) ( 1)( 3).P x a x x a x x a x x
Reemplazando los valores dex obtenemos:
6
0 0.25a , 1 0.25a
, 2 0.5a
Donde:
( ) 0.25( 3)( 5) 0.25( 1)( 5) 0.5( 1)( 3).P x x x x x x x
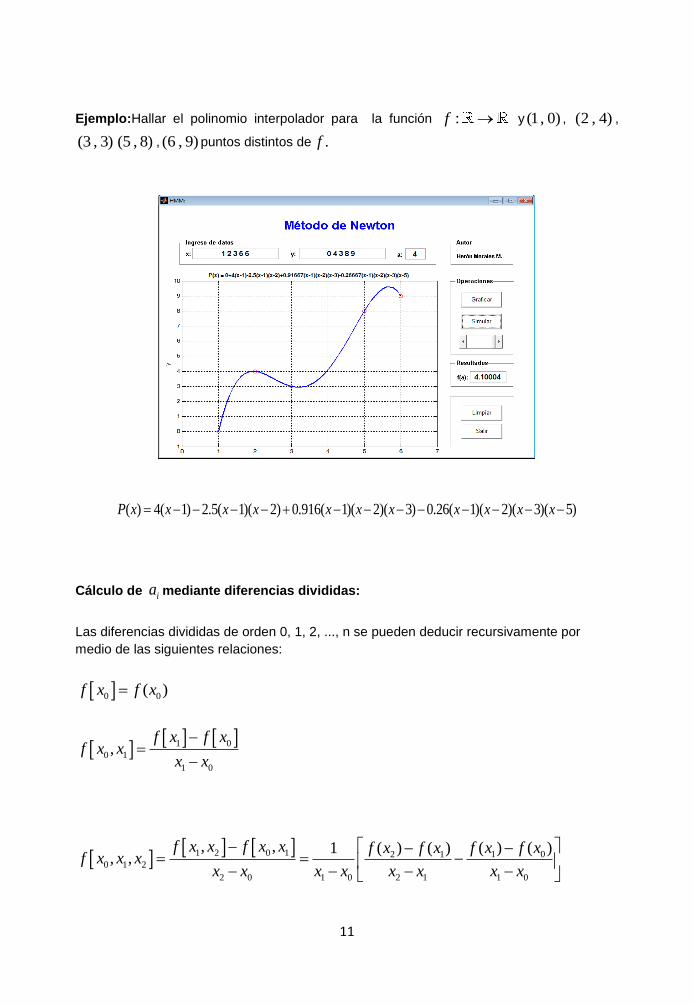
Ejemplo:Hallar el polinomio interpolador para la función :f y (0 , 0) ,
(1, 1) , (3 , 21) (4 , 52)puntos distintos de .f
.
( ) 0.166( )( 3)( 4) 3.5( )( 1)( 4) 4.33( )( 1)( 3).P x x x x x x x x x x
(2) 4.66672P

7
Método: Serie de Potencias
Este método construye unpolinomio interpoladorde orden
n 1 2
1 2 1 0( ) ...n n
n nP x a x a x a x a x a
para 1n puntos dados,reemplazando
los puntos dados en el polinomio y resolviendo el sistema de ecuaciones generado,
hallando de esta manera sus coeficientes.
Ejemplo:Consideremos una función :f y ( 2 ,10) , ( 1, 4) ,
(1, 6) (2 , 3) ,puntos distintos de f .
Construyamos 3 2
3 2 1 0( )P x a x a x a x a .
Reemplazando los valores en el polinomio se obtiene el siguiente sistema de ecuaciones:
3 2 1 0
3 2 1 0
3 2 1 0
3 2 1 0
8 4 2 10
4
6
8 4 2 3
a a a a
a a a a
a a a a
a a a a
Esto es equivalente al sistema:
3
2
1
0
8 4 2 1 10
1 1 1 1 4
1 1 1 1 6
8 4 2 1 3
a
a
a
a
Obteniendo así el resultado: 3 2 1 00.19167, 0.5, 1.9167, 4.5a a a a y el
polinomio: 3 2( ) 0.9167 0.5 1.9167 4.5P x x x x
En forma general para 1n puntos el polinomio es de la forma:
1 2
1 2 1 0( ) ...n
nP x a x a x a x a
8
Y el sistema:
2
1 2 1 1 1 0 1
2
2 2 2 1 2 0 2
2
1 2 1 1 1 0 1
...
...
.......................................................
.......................................................
...
n
n
n
n
n
n n n n n
a x a x a x a y
a x a x a x a y
a x a x a x a y
La matriz de coeficientes de este sistema se conoce como la matriz de Vandermonde y se
puede demostrar que es no singular si los ix son todos distintos. (Esta condición se
asumirá de aquí en adelante). De modo que el polinomio de interpolación ( )nP x exista por
la proposición anterior.
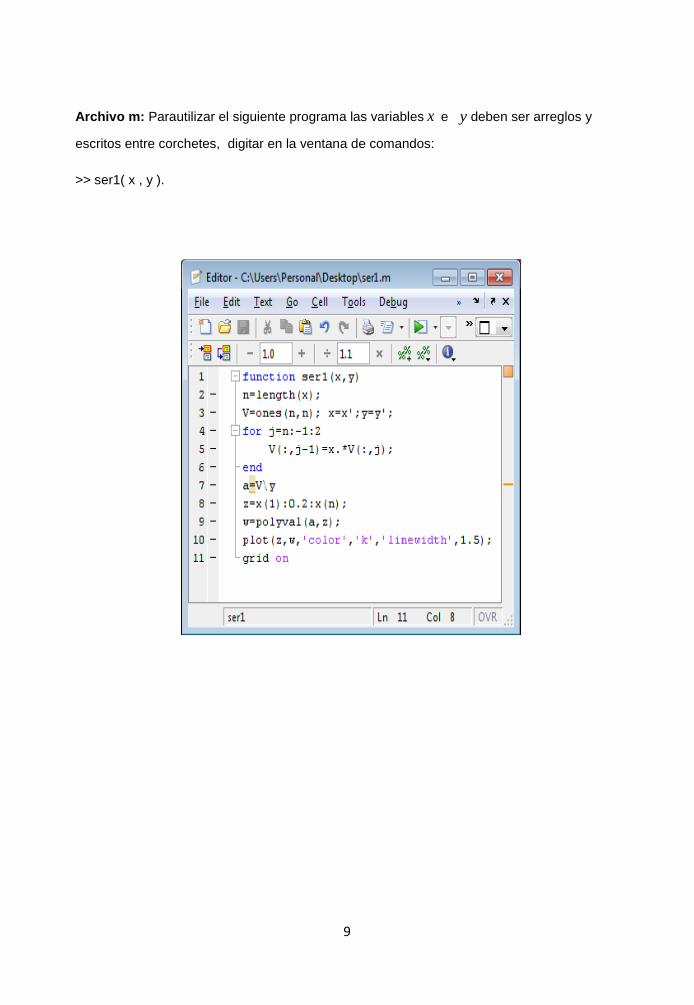
Ejemplo:Hallar el polinomio interpolador para la función :f y (1, 0) , (2 , 4) ,
(3 , 3) (5 , 8) , (6 , 9) puntos distintos de .f
El polinomio es:
4 3 2( ) 0.2667 3.85 18.93 37.85 22.5P x x x x x
9
Archivo m: Parautilizar el siguiente programa las variables x e y deben ser arreglos y
escritos entre corchetes, digitar en la ventana de comandos:
>> ser1( x , y ).

10
Método: Newton.
Este método construye el polinomio interpolador de orden n en la siguiente forma:
0 1 1 2 1 2 1 2( ) ( ) ( )( ) ... ( )( )...( )n nP x a a x x a x x x x a x x x x x x para 1n
puntos dados reemplazando los puntos dados en el polinomio, lo que permite obtener una
matriz de coeficientes triangular inferior. Esto es una gran ventaja ya que la matriz de
Vandermonde es densa y en general mal acondicionada.
Ejemplo:Consideremos una función :f y ( 2 ,10) , ( 1, 4) ,
(1, 6) (2 , 3) ,puntos distintos de f .
Construyamos. 0 1 2 3( ) ( 2) ( 2)( 1) ( 2)( 1)( 1)P x a a x a x x a x x x
Reemplazando los valores en el polinomio se obtiene el siguiente sistema de ecuaciones:
0
0 1
0 1 2
0 1 2 3
10
4
3 6 6
4 12 12 3
a
a a
a a a
a a a a
Esto es equivalente al sistema:
0
1
2
3
1 0 0 0 10
1 1 0 0 4
1 3 6 0 6
1 4 12 12 3
a
a
a
a
Obteniendo así el resultado: 0 1 2 310, 6, 7 /3, 11/12.a a a a y el polinomio:
( ) 10 6( 2) (7 /3)( 2)( 1) (11/12)( 2)( 1)( 1)P x x x x x x x
11
Ejemplo:Hallar el polinomio interpolador para la función :f y (1, 0) , (2 , 4) ,
(3 , 3) (5 , 8) , (6 , 9) puntos distintos de .f
( ) 4( 1) 2.5( 1)( 2) 0.916( 1)( 2)( 3) 0.26( 1)( 2)( 3)( 5)P x x x x x x x x x x x
Cálculo de ia mediante diferencias divididas:
Las diferencias divididas de orden 0, 1, 2, ..., n se pueden deducir recursivamente por
medio de las siguientes relaciones:
0 0( )f x f x
1 0
0 1
1 0
,f x f x
f x xx x
1 2 0 1 1 02 1
0 1 2
2 0 1 0 2 1 1 0
, , ( ) ( )( ) ( )1, ,
f x x f x x f x f xf x f xf x x x
x x x x x x x x
12
1 0 1
0
0
,..., ,...,,...,
k k
k
k
f x x f x xf x x
x x
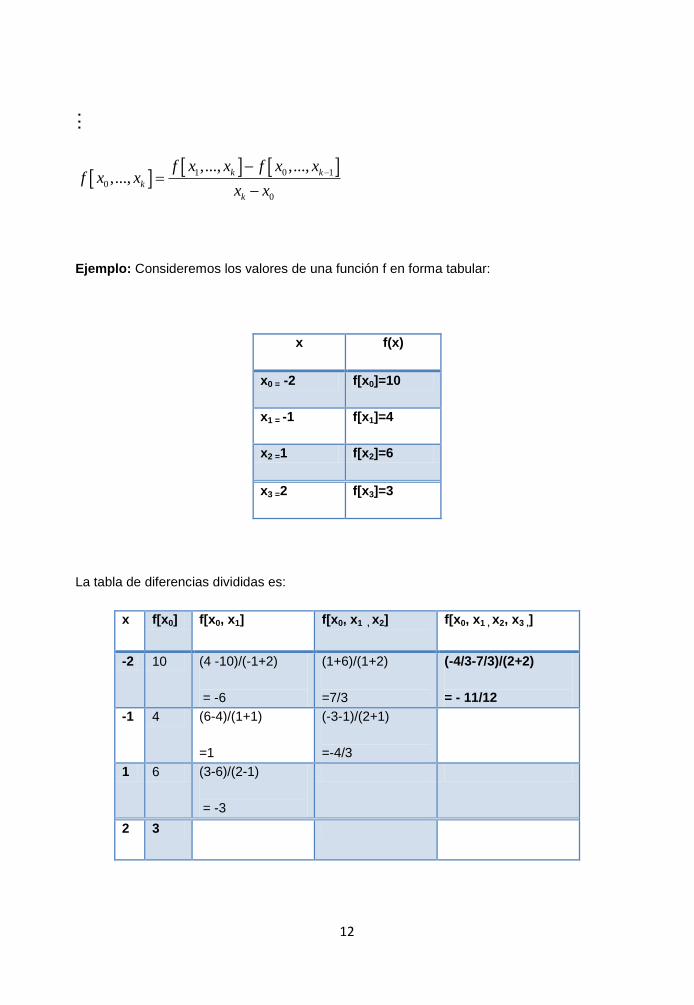
Ejemplo: Consideremos los valores de una función f en forma tabular:
x f(x)
x0 = -2 f[x0]=10
x1 = -1 f[x1]=4
x2 =1 f[x2]=6
x3 =2 f[x3]=3
La tabla de diferencias divididas es:
x f[x0] f[x0, x1] f[x0, x1 , x2] f[x0, x1 , x2, x3 ,]
-2 10 (4 -10)/(-1+2)
= -6
(1+6)/(1+2)
=7/3
(-4/3-7/3)/(2+2)
= - 11/12
-1 4 (6-4)/(1+1)
=1
(-3-1)/(2+1)
=-4/3
1 6 (3-6)/(2-1)
= -3
2 3
13
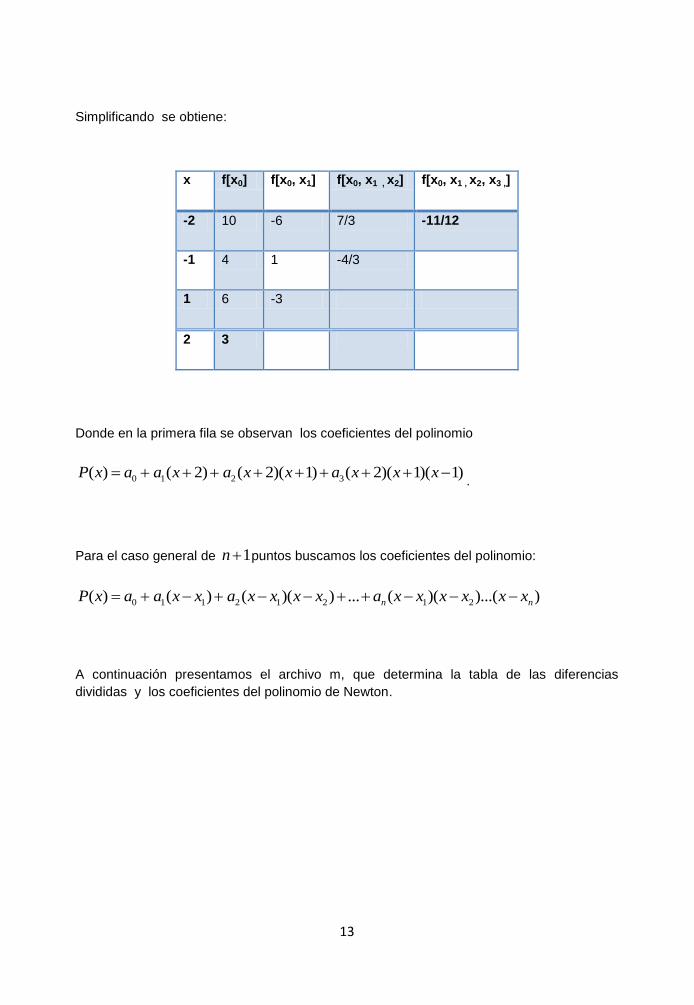
Simplificando se obtiene:
x f[x0] f[x0, x1] f[x0, x1 , x2] f[x0, x1 , x2, x3 ,]
-2 10 -6 7/3 -11/12
-1 4 1 -4/3
1 6 -3
2 3
Donde en la primera fila se observan los coeficientes del polinomio
0 1 2 3( ) ( 2) ( 2)( 1) ( 2)( 1)( 1)P x a a x a x x a x x x .
Para el caso general de 1n puntos buscamos los coeficientes del polinomio:
0 1 1 2 1 2 1 2( ) ( ) ( )( ) ... ( )( )...( )n nP x a a x x a x x x x a x x x x x x
A continuación presentamos el archivo m, que determina la tabla de las diferencias
divididas y los coeficientes del polinomio de Newton.
14
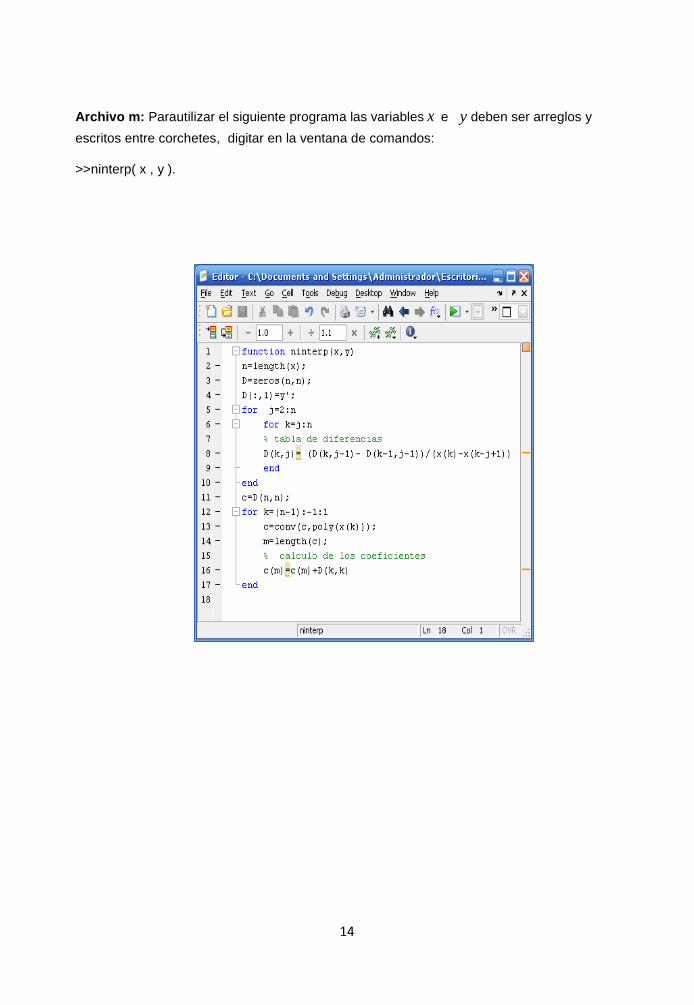
Archivo m: Parautilizar el siguiente programa las variables x e y deben ser arreglos y
escritos entre corchetes, digitar en la ventana de comandos:
>>ninterp( x , y ).

15
Interpolación Polinomial por Partes
El uso de polinomios de interpolación de alto grado puede producir errores grandes debido
al alto grado de oscilación de este tipo de polinomios. Para evitar este problema se busca
aproximar la función desconocida en intervalos pequeños usando polinomios de grado
bajo. El caso más común de la interpolación por partes es usar polinomios cúbicos.
Polinomios Cúbicos de Lagrange: Este método considera que n es divisible por tres y
busca un polinomio cúbico que interpole a la función en los puntos 3 3jx , 3 2jx , 3 1jx , 3 jx .
Este polinomio está dado en su representación de Lagrange como:
3 2 3 1 3 3 3 3 3 3 1 3 3 23 3
3 3 3 2 3 3 1 3 3 3 2 3 1 33 3
1 1( ) ( )( )( ) ( )( )( )
6 2
1 1( )( )( ) ( )( )( )
2 6
j j j j j j j j
j j j j j j j j
P x x x x x x x y x x x x x x yh h
x x x x x x y x x x x x x yh h
Para1 /3j n , 3 3 3j jx x x y 1i ih x x se asume constante .i
Interpolación de Hermite: Este método construye un polinomio por partes ( )nH x que
sea cúbico en cada subintervalo 1 , 1 .i ix x i n y que interpole a ( )f x y '( )f x en
los puntos 0 ,..., nx x . La función ( )nH x queda determinada en forma única por
estascondiciones y su cálculo requiere de la solución de n sistemas lineales de orden 4x4
cada uno. La desventaja de la interpolación de Hermite es que requiere de la disponibilidad
de los '( ), 0if x i n lo cual no es el caso en muchas aplicaciones.
Interpolación Spline: Los dos tipos de polinomios por partes que hemos discutidos hasta
ahora tienen la desventaja de que su segunda derivada no es continua en los puntos de
interpolación. Se ha observado que en aplicaciones gráficas, el ojo humano es capaz de
detectar discontinuidades en las segundas derivadas de una función, haciendo que los
gráficos con este tipo de funciones no luzcan uniformes. Esto motiva el uso de los splines
que son funciones ( )s x continúas por partes con las siguientes propiedades:
1. ( )s x es polinomio cúbico en 1 , 1 .i ix x i n .
16
2. '( ), ''( )s x s x existen y son continuas en 0 , nx x .
3. ( )s x interpola a la función f en los datos ( , ), 0i ix y i n .
4. ( )s x es continua en 0 , nx x .
Siescribimos3 2
3 0 2 0 1 0 0( ) ( ) ( ) ( )s x a x x a x x a x x a , 1, , 1 .i ix x x i n e
ntonces tenemos un total de 4n valores desconocidos. Las condiciones 2) y 4) nos dan
3( 1)n ecuaciones mientras que de 3) obtenemos 1n para un total de 2 grados de
libertad. Estos grados de libertad se fijan imponiendo condiciones de frontera adicionales
en ( )s x .
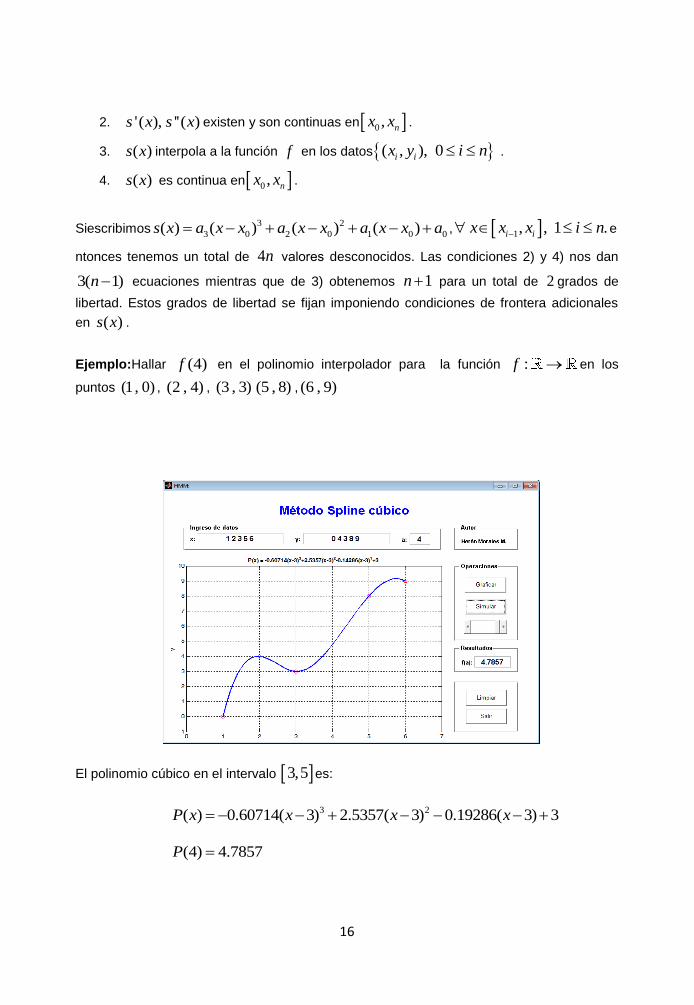
Ejemplo:Hallar (4)f en el polinomio interpolador para la función :f en los
puntos (1, 0) , (2 , 4) , (3 , 3) (5 , 8) , (6 , 9)
El polinomio cúbico en el intervalo 3,5 es:
3 2( ) 0.60714( 3) 2.5357( 3) 0.19286( 3) 3P x x x x
(4) 4.7857P
17
Los 3 polinomios restantes son:
El polinomio cúbico en el intervalo 1,2 es:
3 2( ) 1.6786( 1) 7.5357( 1) 9.8571( 1)P x x x x
El polinomio cúbico en el intervalo 2,3 es:
3 2( ) 1.6786( 2) 2.5( 2) 0.1786( 2) 4P x x x x
El polinomio cúbico en el intervalo 5,6 es:
3 2( ) 0.60714( 5) 1.1071( 5) 2.7143( 5) 8P x x x x
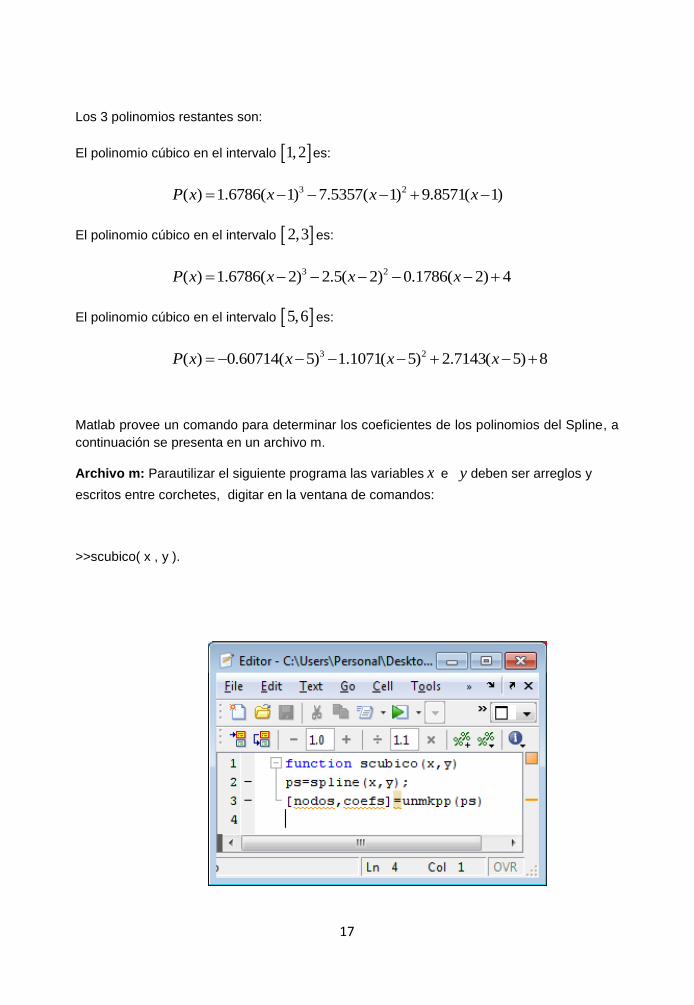
Matlab provee un comando para determinar los coeficientes de los polinomios del Spline, a
continuación se presenta en un archivo m.
Archivo m: Parautilizar el siguiente programa las variables x e y deben ser arreglos y
escritos entre corchetes, digitar en la ventana de comandos:
>>scubico( x , y ).

18
Condición Natural de los Splines: Para fijar los dos grados de libertad en el spline,
requerimos que ( )s x sea lineal en los intervalos0, ], [ ,nx x lo cual es equivalente a
las condiciones 0''( ) ''( ) 0ns x s x .
Para el caso de implementar esta opción en Matlab se usa el formato:
ps=spline(x,[0 y 0]).
Mínimos Cuadrados Polinomiales
Consideremos ahora el problema de aproximar una función en un número grande de
puntos que contienen posiblemente un cierto grado de error. En lugar de tratar de ajustar
un polinomio de alto grado o insistir en interpolar puntos que sabemos tienen un cierto
grado de error, lo que hacemos es que buscamos una función que en cierto sentido suavice
las fluctuaciones en los puntos y a la vez resalte las características esenciales de estos. En
el método de los mínimos cuadrados, se trata de minimizar la suma de los cuadrados de las
diferencias entre los valores y la función que se usa para aproximar estos valores.
Suponga que los valoresestán dados por ( , )k kx y , donde 1,2,...,k m . La función que
usamos para aproximar estos datos tiene la forma general:
1 1 2 2( ) ( ) ( ) ... ( )n ng x a x a x a x y las funciones ( ) :1i x i n son funciones
dadas y los :1ia i n son desconocidas.
Un caso común es tomar1( ) :1i
i x x i n y en este caso decimos que buscamos
aproximar los datos con un polinomio de grado a lo más 1n . Las diferencias entre los
datos y la función ( )g x están dadas por:
1 1 2 2( ( ) ( ) ... ( )), 1k k n ny a x a x a x k n
Buscamos pues minimizar la suma de los cuadrados de estas diferencias dada por:
2
1
m
k
k
S

19
Bajo ciertas condiciones en los datos ( , ), 1k kx y k m , los valores de :1ia i n
que minimizan a S son solución del sistema lineal (ecuaciones normales):
t tA Aa A b
Dónde:
1 1 2 1 3 1 1
1 2 2 2 3 2 2
1 3 2 3 3 3 3
1 2 3
( ) ( ) ( ) ... ( )
( ) ( ) ( ) ... ( )
( ) ( ) ( ) ... ( )
...............................................
( ) ( ) ( ) ... ( )
n
n
n
m m m n m
x x x x
x x x x
A x x x x
x x x x
,
1
2
3
...
n
a
a
a a
a
,
1
2
3
...
m
y
y
b y
y
La solución a de las ecuaciones normales se conoce como la solución de mínimos
cuadrados para los datos ( , ), 1k kx y k m , usando las funciones
base ( ) :1i x i n . En el caso1( ) :1i
i x x i n el problema de minimizar S se
conoce como el problema de Mínimos Cuadrados Polinomiales y la matriz A toma la forma:
2 1
1 1 1
2 1
2 2 2
2 1
3 3 3
2 1
1 ...
1 ...
1 ...
............................
1 ...
n
n
n
n
m m m
x x x
x x x
A x x x
x x x
.
20
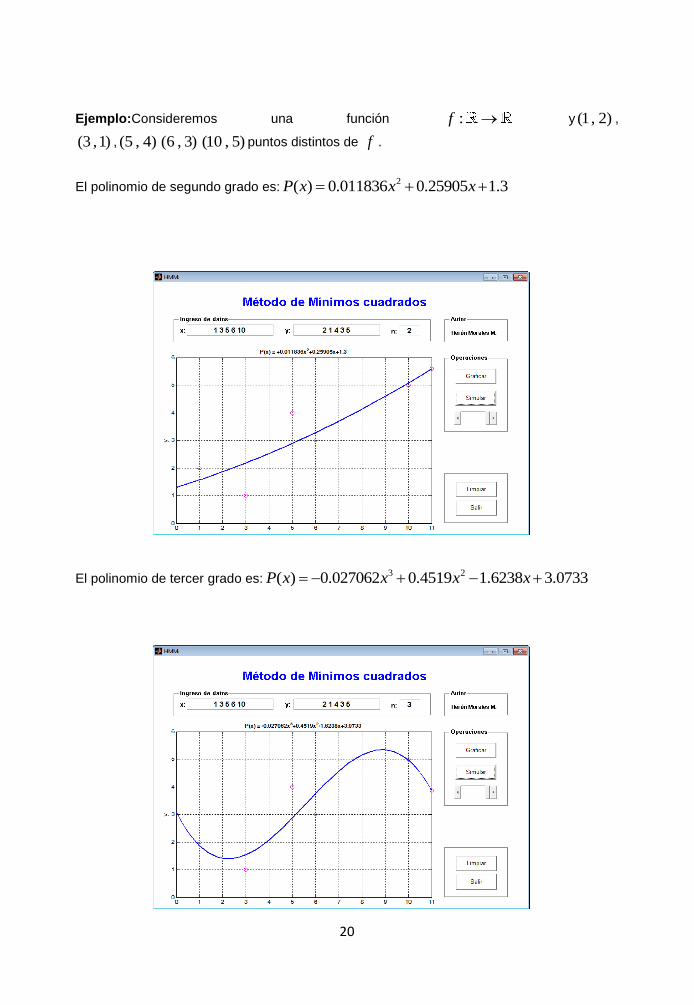
Ejemplo:Consideremos una función :f y (1, 2) ,
(3 ,1) , (5 , 4) (6 , 3) (10 , 5) puntos distintos de f .
El polinomio de segundo grado es:2( ) 0.011836 0.25905 1.3P x x x
El polinomio de tercer grado es:3 2( ) 0.027062 0.4519 1.6238 3.0733P x x x x
21
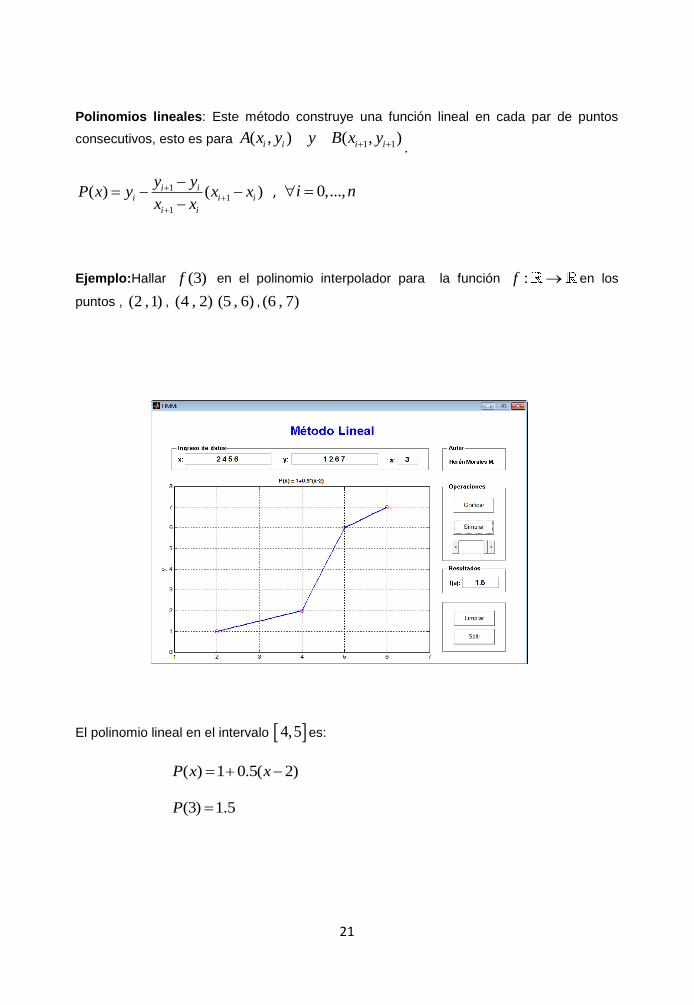
Polinomios lineales: Este método construye una función lineal en cada par de puntos
consecutivos, esto es para 1 1( , ) ( , )i i i iA x y y B x y .
11
1
( ) ( )i ii i i
i i
y yP x y x x
x x
, 0,...,i n
Ejemplo:Hallar (3)f en el polinomio interpolador para la función :f en los
puntos , (2 ,1) , (4 , 2) (5 , 6) , (6 , 7)
El polinomio lineal en el intervalo 4,5 es:
( ) 1 0.5( 2)P x x
(3) 1.5P
22
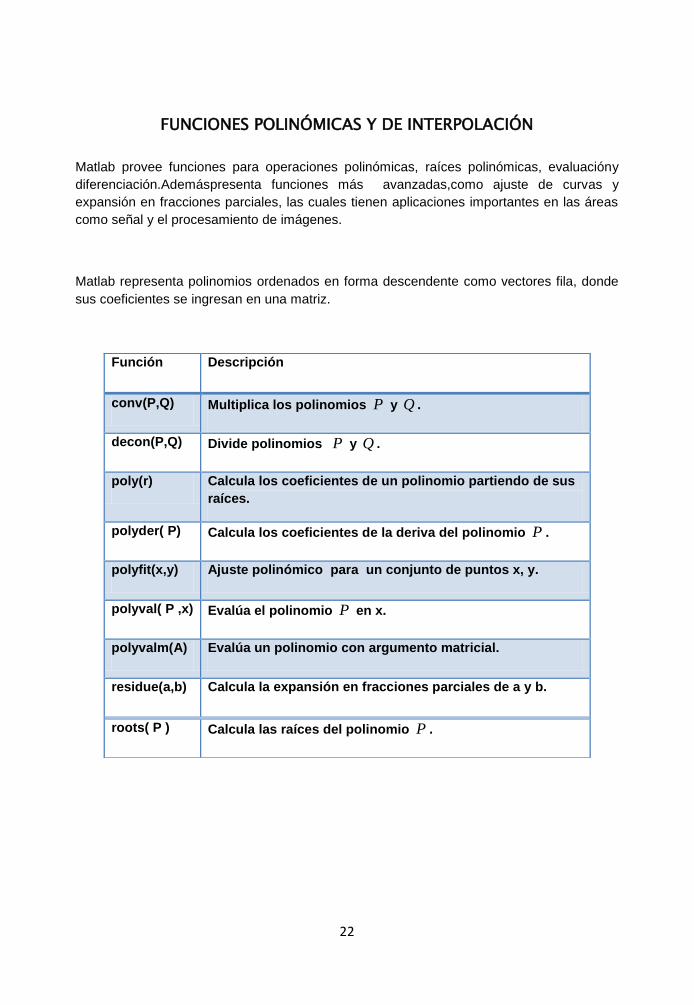
FUNCIONES POLINÓMICAS Y DE INTERPOLACIÓN
Matlab provee funciones para operaciones polinómicas, raíces polinómicas, evaluacióny
diferenciación.Ademáspresenta funciones más avanzadas,como ajuste de curvas y
expansión en fracciones parciales, las cuales tienen aplicaciones importantes en las áreas
como señal y el procesamiento de imágenes.
Matlab representa polinomios ordenados en forma descendente como vectores fila, donde
sus coeficientes se ingresan en una matriz.
Función Descripción
conv(P,Q) Multiplica los polinomios P y Q .
decon(P,Q) Divide polinomios P y Q .
poly(r) Calcula los coeficientes de un polinomio partiendo de sus
raíces.
polyder( P) Calcula los coeficientes de la deriva del polinomio P .
polyfit(x,y) Ajuste polinómico para un conjunto de puntos x, y.
polyval( P ,x) Evalúa el polinomio P en x.
polyvalm(A) Evalúa un polinomio con argumento matricial.
residue(a,b) Calcula la expansión en fracciones parciales de a y b.
roots( P ) Calcula las raíces del polinomio P .

23
Multiplicación de Polinomios
Ejemplo: Consideremos el polinomio 2( ) 2 3P x x x y
2( ) 4 5 6Q x x x .
>> P = [ 12 3 ];
>> Q = [ 45 6 ];
>> R = conv(P,Q)
Nos devuelve como resultado:
4 13 28 27 18
Esto es 4 3 2( ) ( ) ( ) 4 13 28 27 18R x P x Q x x x x x .
División de Polinomios
Ejemplo: Consideremos el polinomio 3 2( ) 4 2 3P x x x x y
2( ) 3 6Q x x x
>> P = [ 4 1 -2 3 ];
>> Q = [ 1 3 6 ];
>> [cr] = deconv(P,Q)
Nos devuelve como resultado:
c =
4 -11
r =
0 0 7 69
Esto es ( ) 4 11C x x cociente y ( ) 7 69R x x residuo.
24
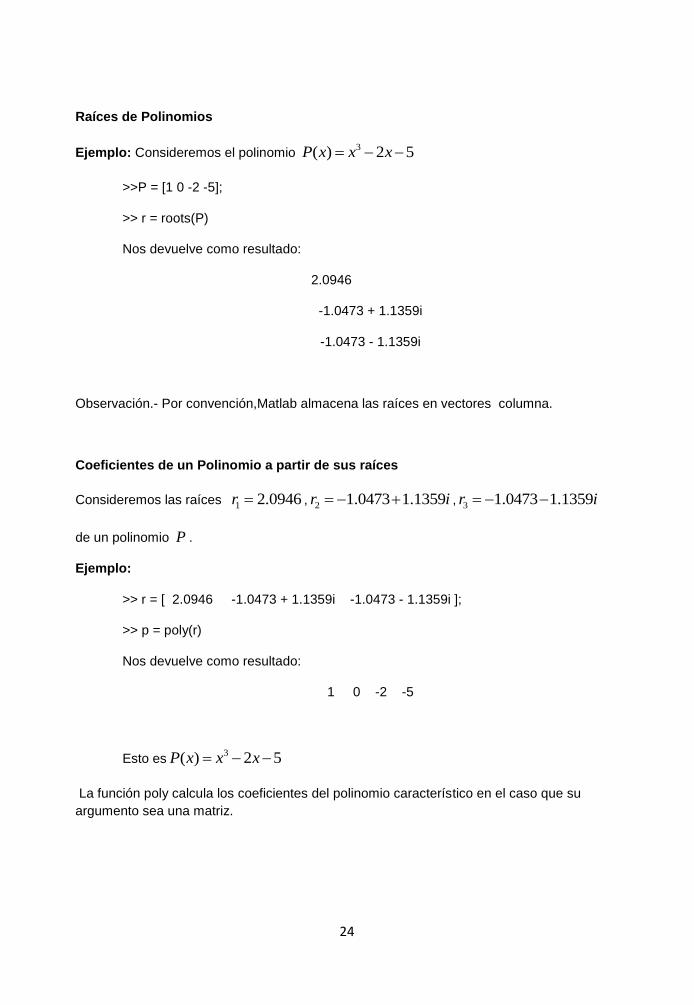
Raíces de Polinomios
Ejemplo: Consideremos el polinomio 3( ) 2 5P x x x
>>P = [1 0 -2 -5];
>> r = roots(P)
Nos devuelve como resultado:
2.0946
-1.0473 + 1.1359i
-1.0473 - 1.1359i
Observación.- Por convención,Matlab almacena las raíces en vectores columna.
Coeficientes de un Polinomio a partir de sus raíces
Consideremos las raíces 1 2.0946r , 2 1.0473 1.1359r i , 3 1.0473 1.1359r i
de un polinomio P .
Ejemplo:
>> r = [ 2.0946 -1.0473 + 1.1359i -1.0473 - 1.1359i ];
>> p = poly(r)
Nos devuelve como resultado:
1 0 -2 -5
Esto es3( ) 2 5P x x x
La función poly calcula los coeficientes del polinomio característico en el caso que su
argumento sea una matriz.

25
Ejemplo:
>>A = [1.2 3 -0.9; 5 1.75 6; 9 0 1];
>>poly(A)
Nos devuelve como resultado:
1.0000 -3.9500 -1.8500 -163.2750
Estos son los coeficientes del polinomio característico de la matriz A, y las raíces de
este polinomioson los auto valoresde la matriz.
Derivada de un polinomio
Ejemplo: Consideremos 4 3 2( ) 2 3 5 9P x x x x x el polinomio a derivar.
>> P = [ 2 -1 3 5 9];
>>polyder(P)
Nos devuelve como resultado:
8 -3 6 5
Esto es3 2'( ) 8 3 6 5P x x x x
Derivada de un producto de Polinomios
polyder. - Calcula la derivada de un producto P*Q con un solo argumento de salida.
Ejemplo: Consideremos 2( ) 5 9P x x x y
2( ) 1P x x x .

26
>> P = [1 -5 9];
>> Q = [1 1 -1];
>>R = polyder(P,Q)
Nos devuelve como resultado:
4 -12 6 14
Esto es 3 2( ) ( ( ) ( )) ' 4 12 6 14R x P x Q x x x x
Derivada de un cociente de Polinomios
polyder calcula la derivada de un cociente P/Q con dos argumentos de salida.
Ejemplo: Consideremos 2( ) 5 9P x x x y ( ) 7Q x x
>> P = [1 -5 9];
>> Q = [17];
>> [n d ] = polyder(P,Q)
Nos devuelve como resultado:
n =
1 14 -44
d =
1 14 49
Esto es 2( ) 14 44n x x x numerador y
2( ) 14 49d x x x el
denominador.
27
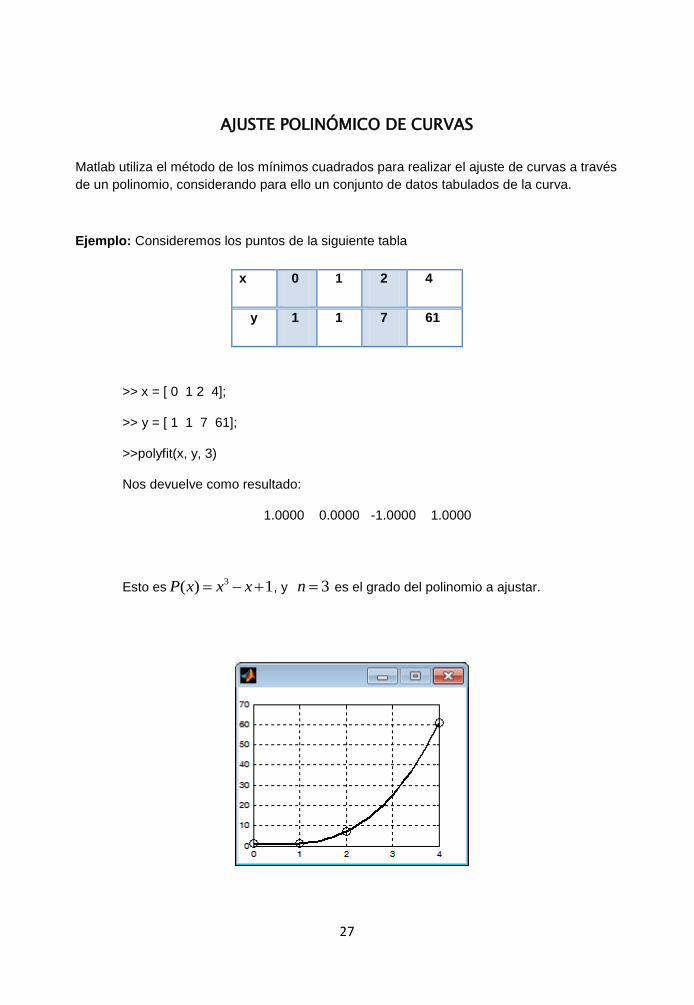
AJUSTE POLINÓMICO DE CURVAS
Matlab utiliza el método de los mínimos cuadrados para realizar el ajuste de curvas a través
de un polinomio, considerando para ello un conjunto de datos tabulados de la curva.
Ejemplo: Consideremos los puntos de la siguiente tabla
x 0 1 2 4
y 1 1 7 61
>> x = [ 0 1 2 4];
>> y = [ 1 1 7 61];
>>polyfit(x, y, 3)
Nos devuelve como resultado:
1.0000 0.0000 -1.0000 1.0000
Esto es3( ) 1P x x x , y 3n es el grado del polinomio a ajustar.

28
EXPANSIÓN EN FRACCIONES PARCIALES
residue. - expresa en fracciones parciales el cociente de dos polinomios, en el caso que
no posea raíces múltiples.
1 2
1 2
( )...
( )
n
n
r r ra sk
b s s p s p s p
Donde la r es un arreglo columna de residuos, p es un arreglo columna de polos,y k es
un arreglo fila que contiene el resto.
Ejemplo: Considere la función de transferencia2
( ) 4 8
( ) 6 8
a s s
b s s s
>> a = [ -4 8 ];
>> b = [ 1 6 8 ];
>> [ r, p, k ] = residue(a , b)
Nos devuelve como resultado:
r =-12
8
p =-4
-2
k =[ ]
Esto es: ( ) 12 8
( ) 4 2
a s
b s s s
.

29
Ejemplo: Considere la función de transferencia
2
2
( ) 5 5 6
( ) 1
a s s s
b s s
>> a = [ 5 5 -6];
>> b = [ 1 0 -1];
>> [ r, p, k ] = residue(a , b)
Nos devuelve como resultado:
r =
2
3
p =
1
-1
k =
5
Esto es: ( ) 2 3
5( ) 1 1
a s
b s s s

30
INTERPOLACIÓN UNIDIMENSIONAL
Matlab provee dos tipos de interpolación de una sola dimensión:
• La interpolación polinómica
• La interpolación basada en FFT, este método calcula la transformada de Fourier de un
vector que contiene los valores de una función periódica.
Interpolación polinómica.- La función interp1 realiza interpolación de una sola dimensión,
una operación importante para el análisis de datos y el ajuste de curvas.Esta función usa
técnicas polinómicas, ajustando los datos suministrados conpolinomios su forma más
general es:
y1 = interp1(x, y, x1, Metodo)
Dónde: x , es un arreglo de valores en orden creciente.
y , es un arreglo que contiene las imágenes de x de una función.
1x , es un número o arreglo números los cuales van a ser interpolados.
Metodo, son lasopciones a utilizar en la interpolación, nearest(valor del punto más
próximo), linear(utiliza una función lineal para cada par de puntos consecutivos),
spline(utiliza una función cúbica suave para cada par de puntos consecutivos)
cubic(utiliza una función cúbica).
Observación.-linear es el método predeterminado para la función del interp1.
Ejemplo:
>> x = [0 1 2 4 7 11];
>> y = [2 -3 2 13 15 1];
>>x1=[3 5 6 8 9 10]; % valores a interpolar
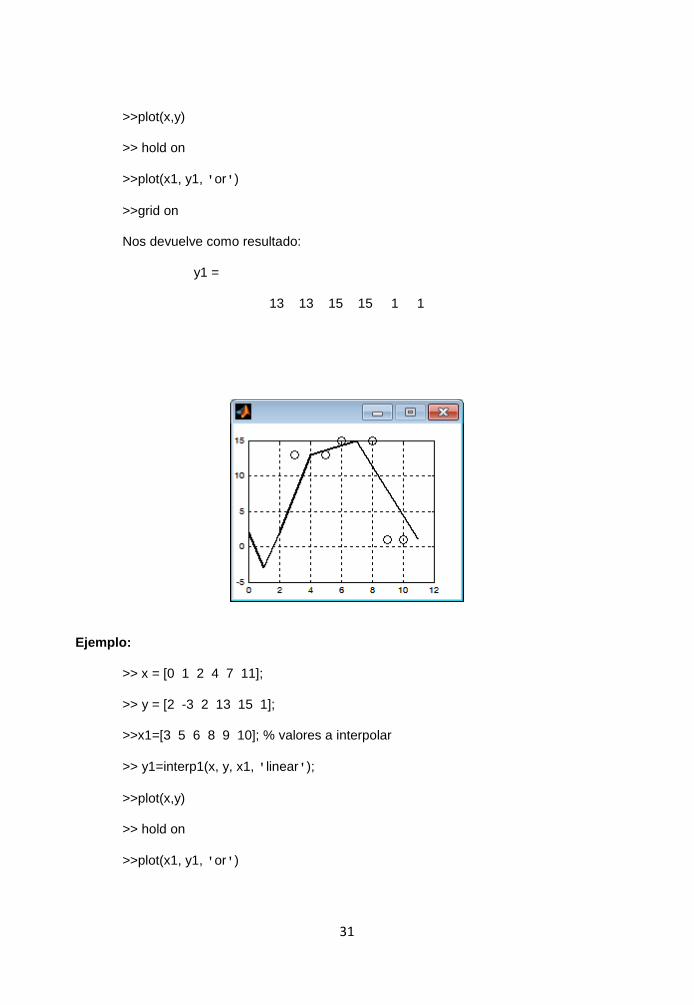
>> y1=interp1(x, y, x1,'nearest')
31
>>plot(x,y)
>> hold on
>>plot(x1, y1, 'or')
>>grid on
Nos devuelve como resultado:
y1 =
13 13 15 15 1 1
Ejemplo:
>> x = [0 1 2 4 7 11];
>> y = [2 -3 2 13 15 1];
>>x1=[3 5 6 8 9 10]; % valores a interpolar
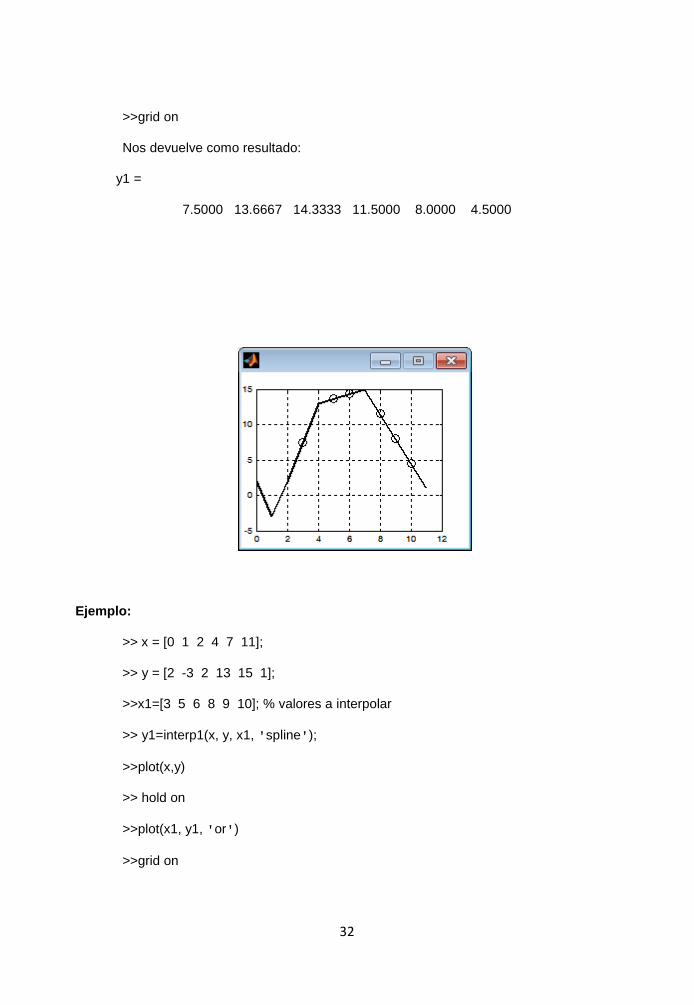
>> y1=interp1(x, y, x1, 'linear');
>>plot(x,y)
>> hold on
>>plot(x1, y1, 'or')
32
>>grid on
Nos devuelve como resultado:
y1 =
7.5000 13.6667 14.3333 11.5000 8.0000 4.5000
Ejemplo:
>> x = [0 1 2 4 7 11];
>> y = [2 -3 2 13 15 1];
>>x1=[3 5 6 8 9 10]; % valores a interpolar
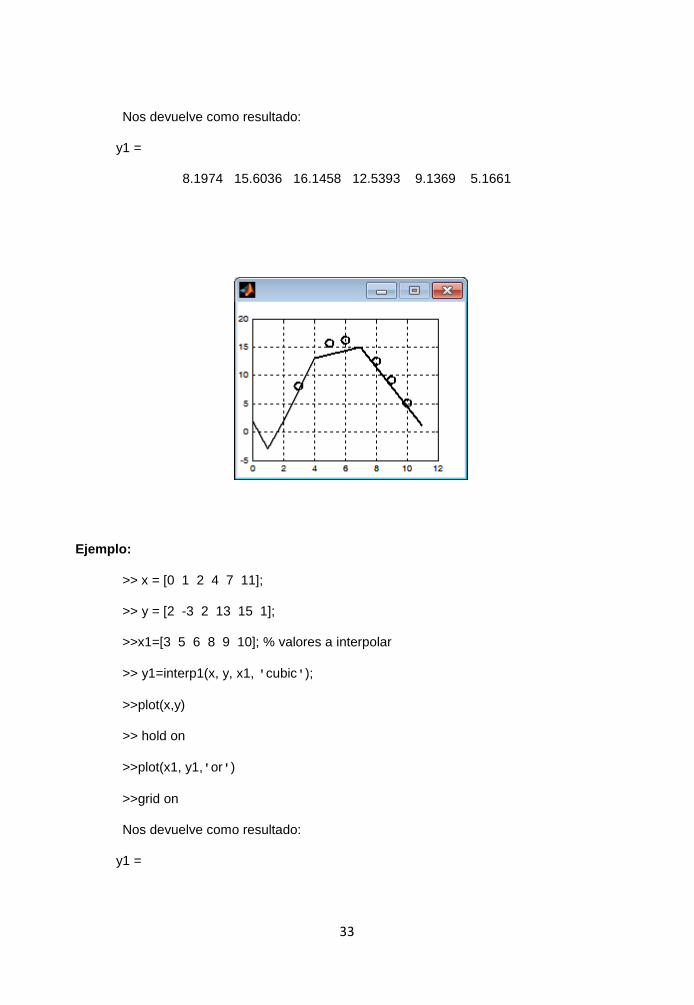
>> y1=interp1(x, y, x1, 'spline');
>>plot(x,y)
>> hold on
>>plot(x1, y1, 'or')
>>grid on
33
Nos devuelve como resultado:
y1 =
8.1974 15.6036 16.1458 12.5393 9.1369 5.1661
Ejemplo:
>> x = [0 1 2 4 7 11];
>> y = [2 -3 2 13 15 1];
>>x1=[3 5 6 8 9 10]; % valores a interpolar
>> y1=interp1(x, y, x1, 'cubic');
>>plot(x,y)
>> hold on
>>plot(x1, y1,'or')
>>grid on
Nos devuelve como resultado:
y1 =
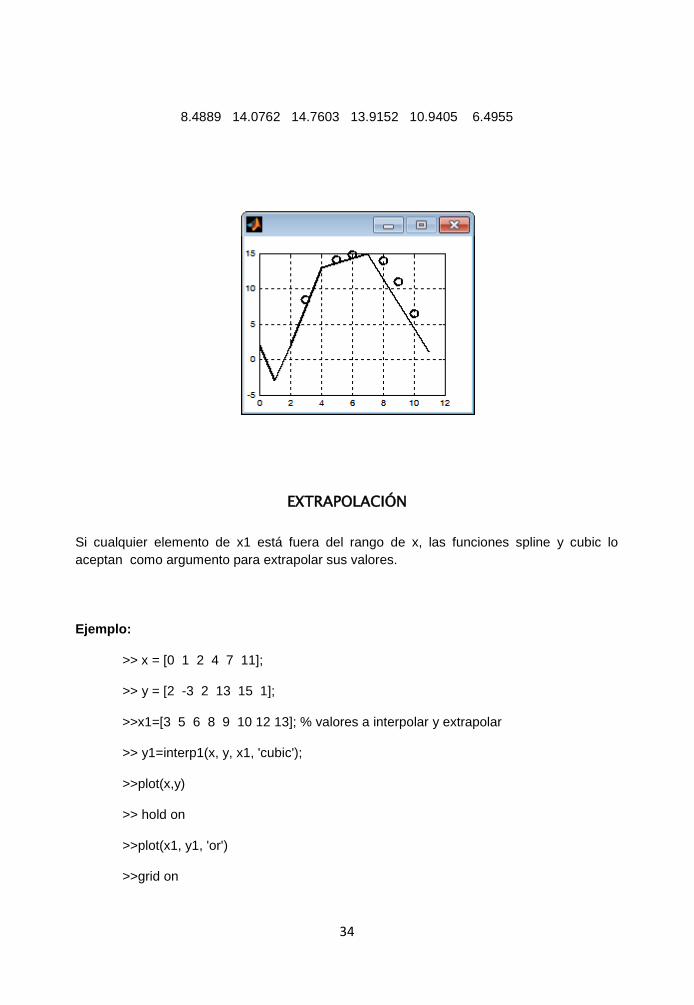
34
8.4889 14.0762 14.7603 13.9152 10.9405 6.4955
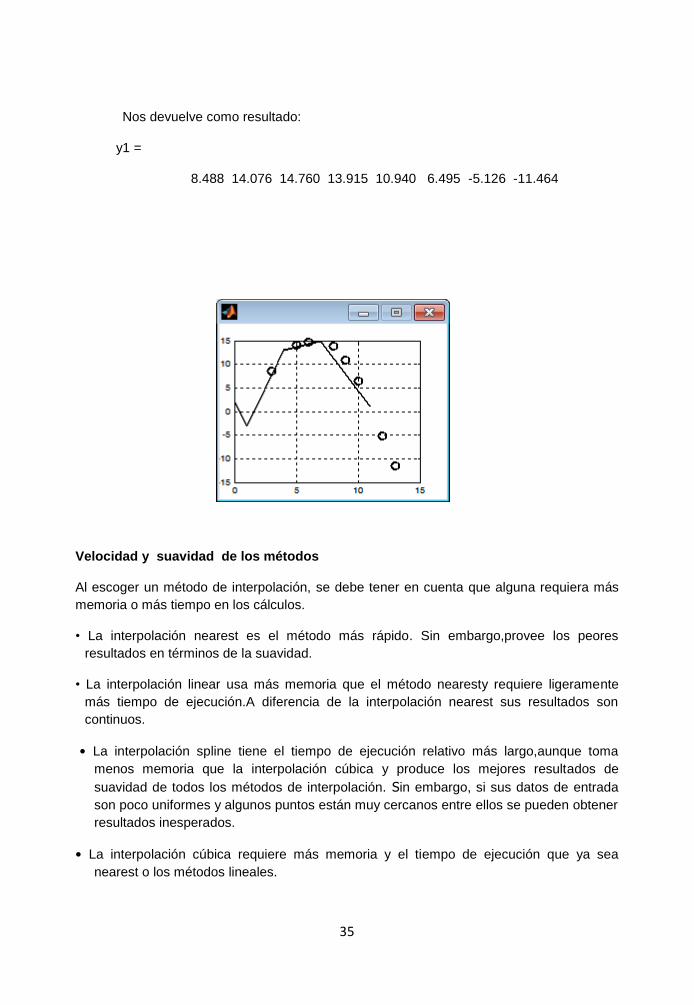
EXTRAPOLACIÓN
Si cualquier elemento de x1 está fuera del rango de x, las funciones spline y cubic lo
aceptan como argumento para extrapolar sus valores.
Ejemplo:
>> x = [0 1 2 4 7 11];
>> y = [2 -3 2 13 15 1];
>>x1=[3 5 6 8 9 10 12 13]; % valores a interpolar y extrapolar
>> y1=interp1(x, y, x1, 'cubic');
>>plot(x,y)
>> hold on
>>plot(x1, y1, 'or')
>>grid on
35
Nos devuelve como resultado:
y1 =
8.488 14.076 14.760 13.915 10.940 6.495 -5.126 -11.464
Velocidad y suavidad de los métodos
Al escoger un método de interpolación, se debe tener en cuenta que alguna requiera más
memoria o más tiempo en los cálculos.
• La interpolación nearest es el método más rápido. Sin embargo,provee los peores
resultados en términos de la suavidad.
• La interpolación linear usa más memoria que el método nearesty requiere ligeramente
más tiempo de ejecución.A diferencia de la interpolación nearest sus resultados son
continuos.
• La interpolación spline tiene el tiempo de ejecución relativo más largo,aunque toma
menos memoria que la interpolación cúbica y produce los mejores resultados de
suavidad de todos los métodos de interpolación. Sin embargo, si sus datos de entrada
son poco uniformes y algunos puntos están muy cercanos entre ellos se pueden obtener
resultados inesperados.
• La interpolación cúbica requiere más memoria y el tiempo de ejecución que ya sea
nearest o los métodos lineales.
36
Interpolación basada en FFT
La función interpft realiza interpolación de una sola dimensión usando un método basado
en FFT, el cual calcula la transformada de Fourier de un vector que contiene los valores de
una función periódica.
Su sintaxis es:
y = interpft (x,n)
x es un vector que contiene los valores de una función periódica, para puntos igualmente
espaciados, n es el número de puntos igualmente espaciados que retorna.
INTERPOLACIÓNBIDIMENSIONAL
La función interp2 nos permite interpolar valores de dos dimensiones,su forma general es:
Z1 = interp2 (X,Y,Z,X1,Y1,Método)
Donde:
Z, es un arreglo rectangular que contiene los valores correspondientes a los puntos
X, Y.
X e Y, son arreglos de un mismo tamaño conteniendo los puntos para los cuales
los valores en Z son dados.
X1 e Y1, son arreglos que contienen los puntos a interpolar.
Método, son opciones a utilizar en la interpolación, existiendo tres métodos
diferentes de interpolación para datos de dos dimensiones: nearest(valor del punto
más próximo), bilinear(utiliza una combinación de los valores de los 4 puntos más
cercanos), bicubic(utiliza una combinación de los valores de los 16 puntos más
cercanos).
Comparación de los Métodos de Interpolación de dos dimensiones
Estos ejemplos comparan los métodos de interpolación de dos dimensiones en una matriz
de orden 7 7x .
37
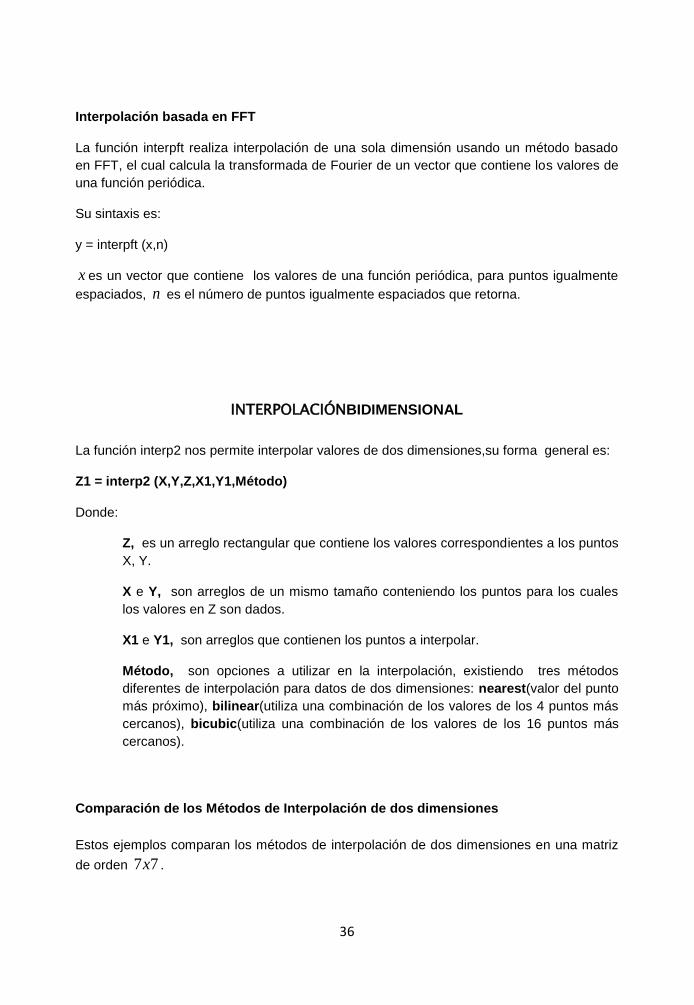
Ejemplo
>> [x , y]= meshgrid(-3 : 1 : 3);
>> z = 3*(1-x).^2.*exp(-(x.^2) - (y+1).^2) - 10*(x/5 - x.^3 - y.^5)…
.*exp(-x.^2- y.^2) - 1/3*exp(-(x+1).^2 - y.^2);
>>surf(x , y , z)
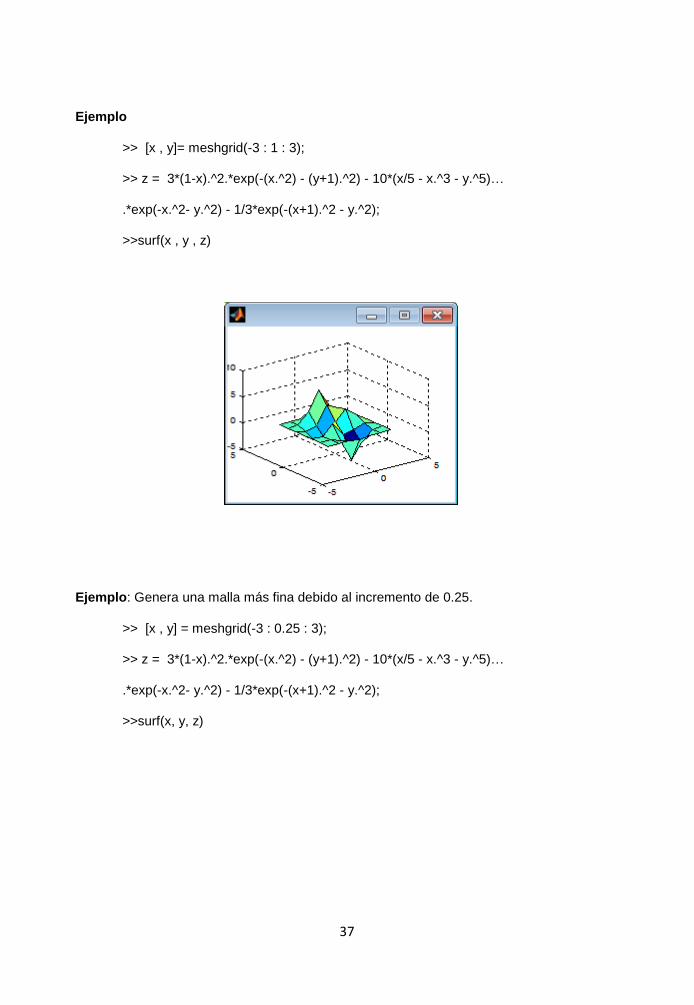
Ejemplo: Genera una malla más fina debido al incremento de 0.25.
>> [x , y] = meshgrid(-3 : 0.25 : 3);
>> z = 3*(1-x).^2.*exp(-(x.^2) - (y+1).^2) - 10*(x/5 - x.^3 - y.^5)…
.*exp(-x.^2- y.^2) - 1/3*exp(-(x+1).^2 - y.^2);
>>surf(x, y, z)
38
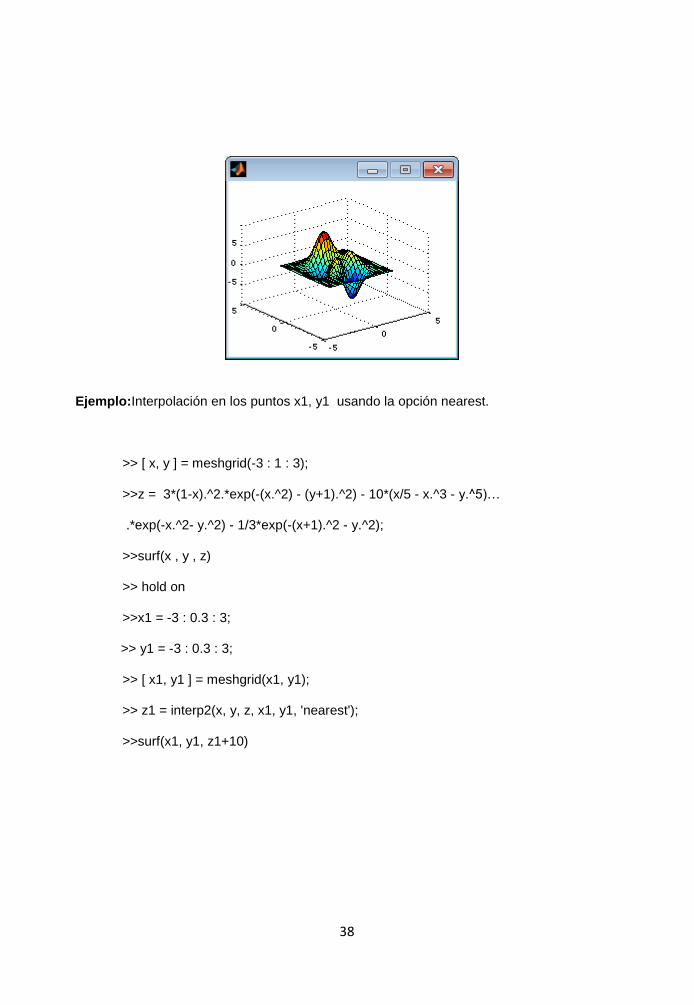
Ejemplo:Interpolación en los puntos x1, y1 usando la opción nearest.
>> [ x, y ] = meshgrid(-3 : 1 : 3);
>>z = 3*(1-x).^2.*exp(-(x.^2) - (y+1).^2) - 10*(x/5 - x.^3 - y.^5)…
.*exp(-x.^2- y.^2) - 1/3*exp(-(x+1).^2 - y.^2);
>>surf(x , y , z)
>> hold on
>>x1 = -3 : 0.3 : 3;
>> y1 = -3 : 0.3 : 3;
>> [ x1, y1 ] = meshgrid(x1, y1);
>> z1 = interp2(x, y, z, x1, y1, 'nearest');
>>surf(x1, y1, z1+10)
39
Ejemplo:Interpolación en los puntos x1, y1 usando la opción bilineal.
>> [ x, y ] = meshgrid(-3 : 1 : 3);
>>z = 3*(1-x).^2.*exp(-(x.^2) - (y+1).^2) - 10*(x/5 - x.^3 - y.^5)…
.*exp(-x.^2- y.^2) - 1/3*exp(-(x+1).^2 - y.^2);
>>surf(x , y , z)
>> hold on
>>x1 = -3 : 0.3 : 3;
>> y1 = -3 : 0.3 : 3;
>> [ x1, y1 ] = meshgrid(x1, y1);
>> z2 = interp2(x, y, z, x1, y1, ' bilineal');
>>surf(x1, y1, z2+10)
40
Ejemplo:Interpolación en los puntos x1, y1 usando la opción bicubic.
>> [ x, y ] = meshgrid(-3 : 1 : 3);
>>z = 3*(1-x).^2.*exp(-(x.^2) - (y+1).^2) - 10*(x/5 - x.^3 - y.^5)…
.*exp(-x.^2- y.^2) - 1/3*exp(-(x+1).^2 - y.^2);
>>surf(x , y , z)
>> hold on
>>x1 = -3 : 0.3 : 3;
>> y1 = -3 : 0.3 : 3;
>> [ x1, y1 ] = meshgrid(x1, y1);
>> z3 = interp2(x, y, z, x1, y1, 'bicubic');
>>surf(x1, y1, z3+10)
41
INTERPOLACIÓNEN TRES DIMENSIONES
La función interp3 nos permite interpolar valores en tres dimensiones,su forma general es:
V1 = interp3(X, Y, Z, V, X1, Y1, Z1, Método)
Donde:
V, es un arreglo tridimensional que contiene los valores correspondientes a los
puntos X, Y, Z.
X ,Y, Z son arreglos de un mismo tamaño conteniendo los puntos para los cuales
los valores en V son dados.
X1,Y1, y Z1 son arreglos que contienen los puntos a interpolar.
Método, son lasopciones a utilizar en la interpolación, existiendo tres métodos
diferentes de interpolación para datos de tres dimensiones: nearest(valor del punto
más próximo), trilinear(utiliza una combinación de los valores de los 8 puntos más
cercanos), tricubic(utiliza una combinación de los valores de los 64 puntos más
cercanos).
Todos estos métodos requieren que los arreglos X,Y,y Z sean crecientes o
decrecientes.
Ejemplo: Interpolación en los puntos x1, y1, z1 usando la opción linear.
>> x = [ 0 3 ];
>> [x, y, z] = meshgrid(x, x, x);
>> v = x.^2 + y.^2 + z;
>> [x1, y1, z1] = meshgrid( 1: 1 : 2 );
>> v1 = interp3(x , y , z , v , x1, y1, z1,' linear ' )
Nos devuelve como resultado:
v1( :, : , 1) =
42
7.0000 10.0000
10.0000 13.0000
v1( :, :, 2) =
8.0000 11.0000
11.0000 14.0000

43
INTERPOLACIÓNMULTIDIMENSIONAL
La función interpn nos permite realizar una interpolación multidimensional,su forma general
es:
V1 = interpn(X, Y, Z, …, W, V, X1, Y1, Z1,…, W1, Método)
Donde:
V, es un arreglo multidimensional que contiene los valores correspondientes a los
puntos X, Y, Z, ... , W.
X ,Y, Z, … , W, son arreglos de un mismo tamaño conteniendo los puntos para los
cuales los valores en V son dados.
X1,Y1, Z1, …, W1, son arreglos que contienen los puntos a interpolar.
Método, son lasopciones a utilizar en la interpolación, para lo cual se cuenta con
tres métodos diferentes de interpolación para datos multidimensionales:
nearest(valor del punto más próximo), linear(utiliza una combinación de los valores
de los 2 puntos más cercanos en cada dimensión), cubic(utiliza una combinación
de los valores de los 4 puntos más cercanos en cada dimensión).
Cada método automáticamente traza un mapa de la entrada para un dominio
igualmente espaciado antes de interpolar.
Ejemplo:Interpolación en los puntos x1, y1, z1, w1 usando la opción nearest.
>> x = [2 5];
>> [x, y, z, w] = ndgrid(x);
>> v = x.^2 + y + z - w.^2;
>> [x1, y1, z1, w1] = ndgrid(3 : 1 : 4);
>> v1 = interpn(x, y, z, w, v, x1, y1, z1, w1, 'nearest')
Nos devuelve como resultado:
v1(:, :, 1, 1) = 4 7
25 28

44
v1(:, :, 2, 1) = 7 10
28 31
v1(:, :, 1, 2) = -17 -14
4 7
v1(:, :, 2, 2) = -14 -11
7 10
Mallas para datos multidimensionales
La función del ndgrid genera arreglos multidimensionales de datos para la evaluación e
interpolación de una función.
ndgrid transforma el dominio especificado por una serie de vectores de entrada en una
serie de arreglos de salida.
La sintaxis para ndgrid es:
[X1, X2, X3,... ] = ndgrid(x1, x2, x3, ... )
Ejemplo: Consideremos la evaluación de una función de tres variables
2 2 2x y zw ye
Para evaluar y graficar esta función escribiremos:
>> x = -2 : 0.2 : 2;
>> y = -2 : 0.25 : 2;
>> z = -2 : 0.16 : 2;
>> [x, y, z] = ndgrid(x, y, z);
45
>> w = y.*exp(-x.^2 - y.^2 - z.^2);
>> slice(y, x, z, w, [-1.2 0.8 2], 2 , [-2 0.2]);
46
INTEGRACIÓN NUMÉRICA
OBJETIVO:
UTILIZAR MÉTODOS DE APROXIMACIÓN NUMÉRICA EN EL
CÁLCULO DE UNA INTEGRAL DEFINIDA.
CONTENIDO:
Método del trapecio.
Método de Simpson 1/3.
Método de Simpson 3/8.
Método de Boole.
Comparación de Métodos.
Integración doble.
47
INTEGRACIÓN NUMÉRICA
En el presente capítulo se describen diferentes métodos de integración numérica los cuales
permiten evaluar integrales simples b
adxxf )( , e integrales dobles
b
a
x
xdydxyxf
)(
)(),(
,
donde las funciones )(xf , ),( yxf pueden estar dadas en forma analítica o en forma
discreta mediante una tabla.
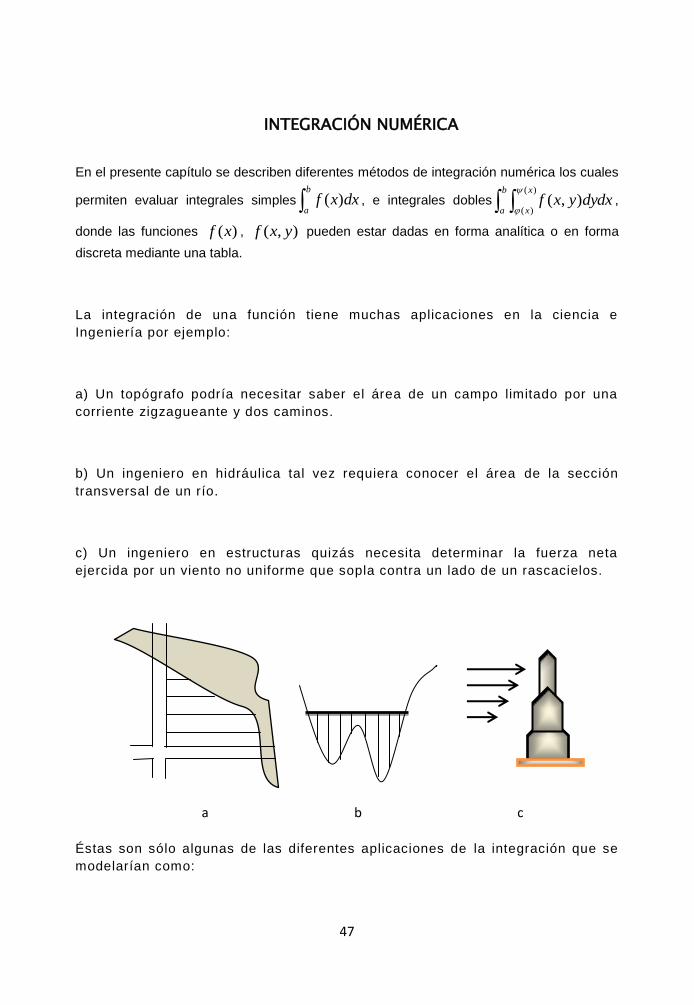
La integración de una función tiene muchas aplicaciones en la ciencia e
Ingeniería por ejemplo:
a) Un topógrafo podría necesitar saber el área de un campo limitado por una
corriente zigzagueante y dos caminos.
b) Un ingeniero en hidráulica tal vez requiera conocer el área de la sección
transversal de un río.
c) Un ingeniero en estructuras quizás necesita determinar la fuerza neta
ejercida por un viento no uniforme que sopla contra un lado de un rascacielos.
Éstas son sólo algunas de las diferentes aplicaciones de la integración que se
modelarían como:
a b c

48
( )b
aI f x dx
Para calcular la integral definida ( )b
af x dx por el Segundo Teorema
Fundamental del Cálculo se tiene:
( ) ( ) ( ) ( )b
b
aa
f x dx F x F b F a
Sin embargo, para el cálculo de la antiderivada existen integrales definidas
tales como: 21 2
0 1
cosh, ,x senx x
e dx dx dxx x
Para los que no existe un método conocido para encontrar su antiderivada,
pero si la función ( )f x es continua en el intervalo cerrado ,a b la integral
definida existe y es un número único.
Para estos casos, en que no se pueden encontrar la antiderivada, veremos a
continuación métodos de aproximación para estimar el valor de una integral
definida.
49
MÉTODO DEL TRAPECIO
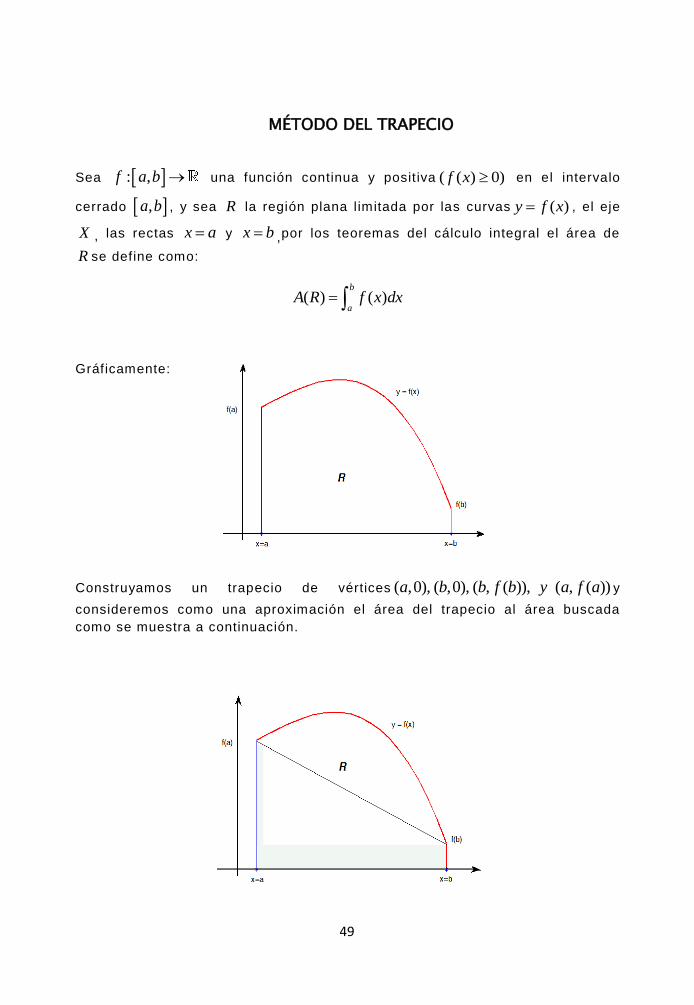
Sea : ,f a b una función continua y posit iva ( ( ) 0)f x en el intervalo
cerrado ,a b , y sea R la región plana limitada por las curvas ( )y f x , el eje
X , las rectas x a y x b ,por los teoremas del cálculo integral el área de
R se define como:
( ) ( )b
aA R f x dx
Gráficamente:
Construyamos un trapecio de vértices ( ,0), ( ,0), ( , ( )), ( , ( ))a b b f b y a f a y
consideremos como una aproximación el área del trapecio al área buscada
como se muestra a continuación.

50
Esto es:
Obteniendo la fórmula del método del trapecio.
Generalización del Método del Trapecio para n subintervalos
Sea ba, el intervalo cerrado con a b y 0 1, , ... , nP a x x x b una
partición regular del intervalo ba, , en n subintervalos de la forma b a
hn
0 1 2 ... na x x x x b
0x a , 1x a h , 2 2x a h ,…. . ix a ih ,
….. .nx a nh b
Gráficamente
Aplicando la fórmula del Trapecio a cada subintervalo se tiene:
( ) ( ) ( ) ( )2
b
a
hA R f x dx f a f b
( ) ( ) ( ) , .2
hA R f a f b h b a

51
Calculando
Reemplazando el valor de cada una de las áreas parciales se tiene:
0 1 2 1( ) ( / 2) ( ) 2 ( ) 2 ( ) ... 2 ( ) ( )n nA R h f x f x f x f x f x
Equivalentemente:
( ) ( / 2) ( ) 2 ( ) 2 ( 2 ) ... 2 ( ( 1) ) ( )A R h f a f a h f a h f a n h f b
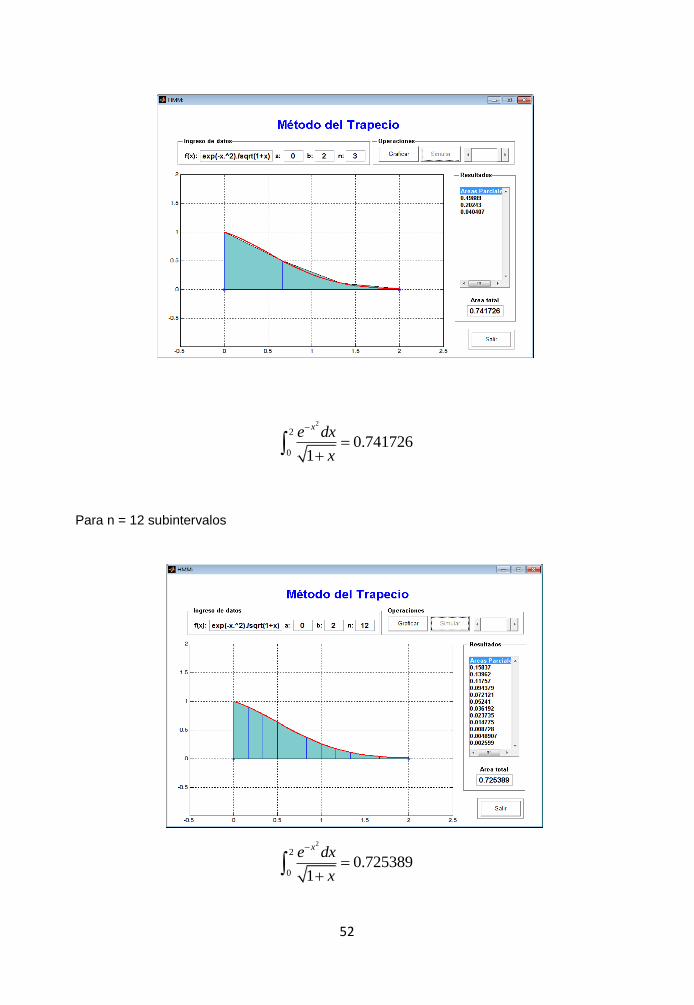
Ejemplo: Calcular numéricamente el valor de la siguiente integral definida
2
2
0 1
xe dx
x
, considerando tres intervalos y doce subintervalos respectivamente.
Solución:
Para n= 3 subintervalos.
1 1
2 1 2
3 2 3
1
( ) ( )2
( ) ( )2
( ) ( )2
.........
.........
( ) ( )2
o
n n n
hA f x f x
hA f x f x
hA f x f x
hA f x f x
1
( )n
i
i
A R A
52
2
2
00.741726
1
xe dx
x
Para n = 12 subintervalos
2
2
00.725389
1
xe dx
x
53
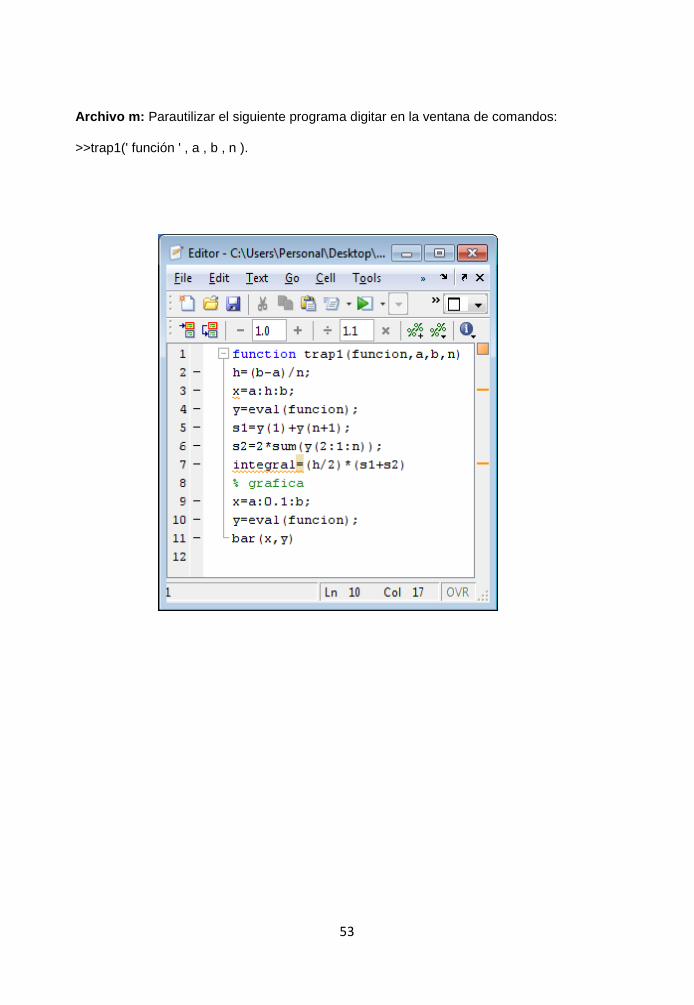
Archivo m: Parautilizar el siguiente programa digitar en la ventana de comandos:
>>trap1(' función ' , a , b , n ).

54
MÉTODO DE SIMPSON 1/3
Sea : ,f a b una función continua y posit iva ( ( ) 0)f x en el intervalo
cerrado ,a b , y sea R la región plana limitada por las curvas ( )y f x , el eje
X , las rectas x a y x b , por los teoremas del cálculo integral el área de
R se define como:
( ) ( )b
aA R f x dx
Gráficamente:
Dividamos el intervalo ,a b en 2 subintervalos, esto es 2
b ah
y 0x a ,
1x a h , 2 .x b
Construyamos un polinomio interpolador 2( )P x Ax Bx C que pase por los
puntos 0 0 1 1 2 2( , ( )), ( , ( )) ( , ( )).x f x x f x y x f x
Si consideremos como una aproximación P f para el cálculo de la integral,
se obtiene:
( ) ( ) ( ) ( / 3)[ ( ) 4 ( ) ( )].b b
a aA R f x dx P x dx h f a f a h f b
55
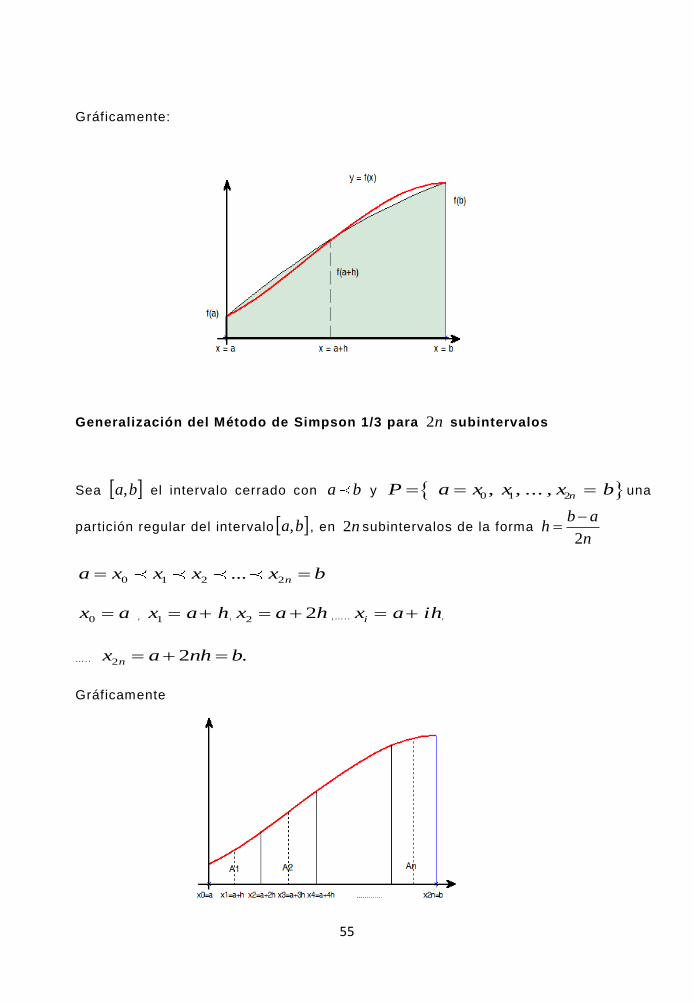
Gráficamente:
Generalización del Método de Simpson 1/3 para 2n subintervalos
Sea ba, el intervalo cerrado con a b y 0 1 2, , ... , nP a x x x b una
partición regular del intervalo ba, , en 2n subintervalos de la forma 2
b ah
n
0 1 2 2... na x x x x b
0x a , 1x a h , 2 2x a h ,…. . ix a ih ,
….. 2 2 .nx a nh b
Gráficamente

56
Aplicando la fórmula de Simpson 1/3 a cada 3 puntos consecutivos se tiene:
Calculando
Reemplazando el valor de cada una de las áreas parciales se tiene:
0 1 2 2 1 2( ) ( / 3) ( ) 4 ( ) 2 ( ) ... 4 ( ) ( )n nA R h f x f x f x f x f x
Equivalentemente:
( ) ( / 3) ( ) 4 ( ) 2 ( 2 ) ... 4 ( (2 1) ) ( )A R h f a f a h f a h f a n h f b
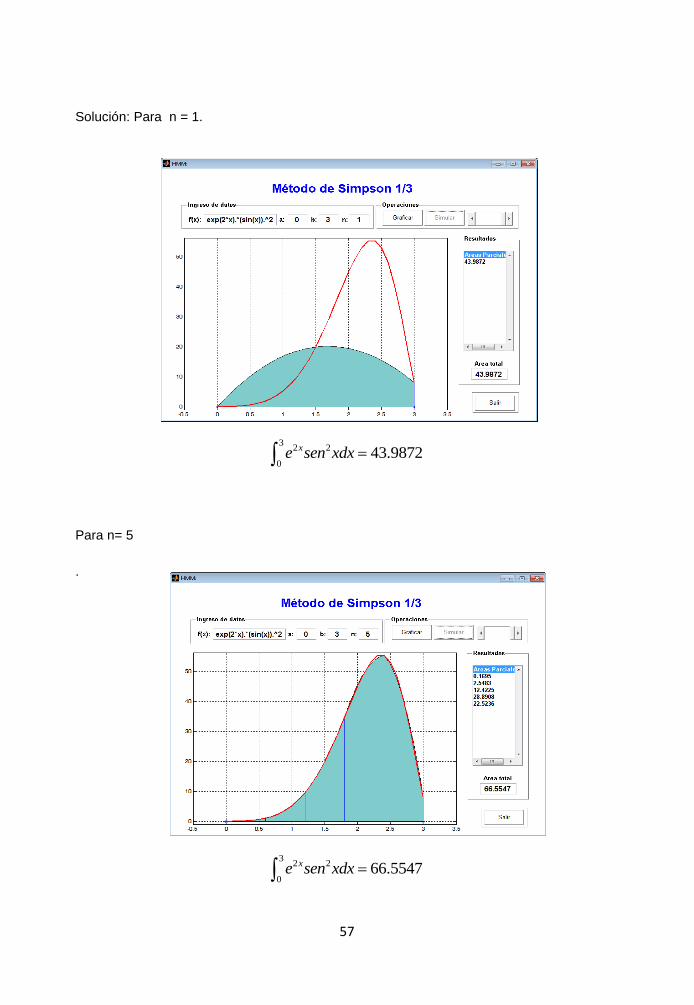
Ejemplo: Calcular numéricamente el valor de la siguiente integral definida
32 2
0
xe sen xdx considerando dos y 10 subintervalos respectivamente.
1 1 2
2 2 3 4
3 4 5 6
2 2 2 1 2
( / 3) ( ) 4 ( ) ( )
( / 3) ( ) 4 ( ) ( )
( / 3) ( ) 4 ( ) ( )
.........
.........
( / 3) ( ) 4 ( ) ( )
o
n n n n
A h f x f x f x
A h f x f x f x
A h f x f x f x
A h f x f x f x
1
( )n
i
i
A R A
57
Solución: Para n = 1.
32 2
043.9872xe sen xdx
Para n= 5
.
32 2
066.5547xe sen xdx
58
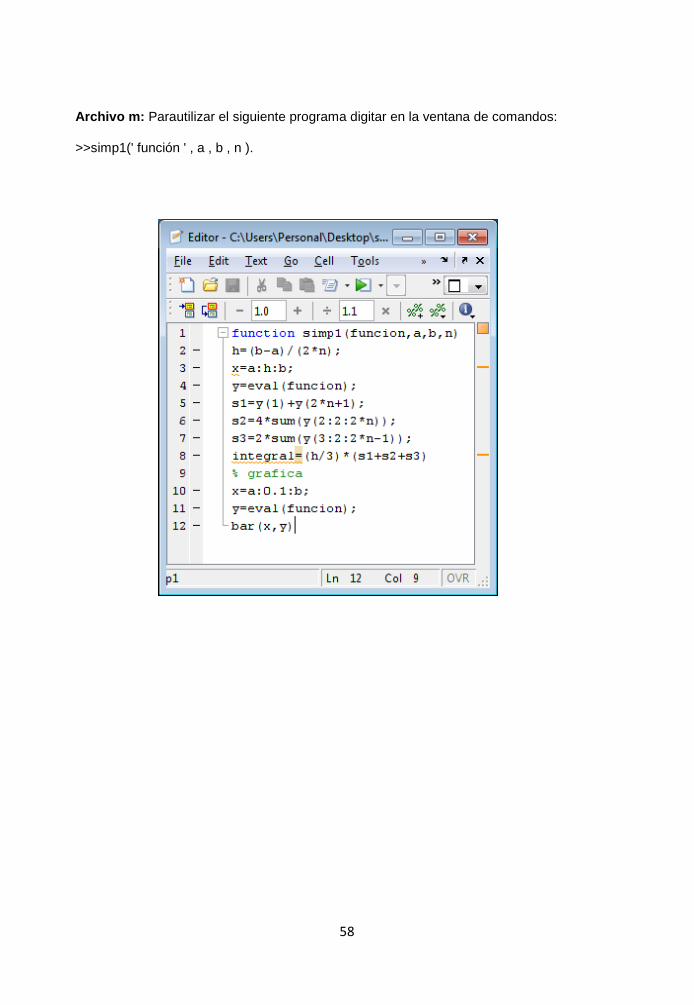
Archivo m: Parautilizar el siguiente programa digitar en la ventana de comandos:
>>simp1(' función ' , a , b , n ).

59
MÉTODO DE SIMPSON 3/8
Sea : ,f a b una función continua y posit iva ( ( ) 0)f x en el intervalo
cerrado ,a b , y sea R la región plana limitada por las curvas ( )y f x , el eje
X , las rectas x a y x b , por los teoremas del cálculo integral el área de
R se define como:
( ) ( )b
aA R f x dx
Gráficamente:
Dividamos el intervalo ,a b en 3 subintervalos, esto es 3
b ah
y 0x a ,
1x a h , 2 2x a h , 3 .x b
Construyamos un polinomio interpolador 3 2( )P x Ax Bx Cx D que pase por
los puntos 0 0 1 1 2 2 3 3( , ( )), ( , ( )), ( , ( )) ( , ( )).x f x x f x x f x y x f x
Si consideremos como una aproximación P f para el cálculo de la integral,
se obtiene:
( ) ( ) ( ) (3 /8)[ ( ) 3 ( ) 3 ( 2 ) ( )].b b
a aA R f x dx P x dx h f a f a h f a h f b
60
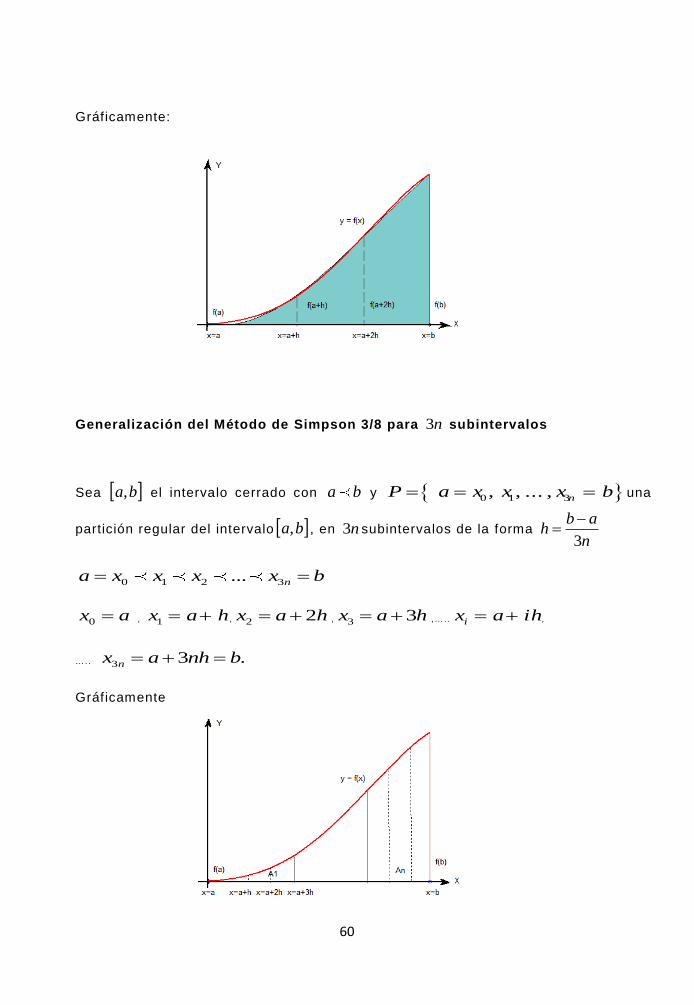
Gráficamente:
Generalización del Método de Simpson 3/8 para 3n subintervalos
Sea ba, el intervalo cerrado con a b y 0 1 3, , ... , nP a x x x b una
partición regular del intervalo ba, , en 3n subintervalos de la forma 3
b ah
n
0 1 2 3... na x x x x b
0x a , 1x a h , 2 2x a h , 3 3x a h ,…. . ix a ih ,
….. 3 3 .nx a nh b
Gráficamente

61
Aplicando la fórmula de Simpson 3/8 a cada 4 puntos consecutivos se tiene:
Calculando
Reemplazando el valor de cada una de las áreas parciales se tiene:
0 1 2 3
3 3 3 2 3 1 3
( ) 3 ( ) 3 ( ) 2 ( ) ...( ) (3 /8)
... 2 ( ) 3 ( ) 3 ( ) ( )n n n n
f x f x f x f xA R h
f x f x f x f x
Equivalentemente:
( ) 3 ( ) 3 ( 2 ) 2 ( 3 ) ...( ) (3 /8)
2 ( (3 3) ) 3 ( (3 2) ) 3 ( (3 1) ) ( )
f a f a h f a h f a hA R h
f a n h f a n h f a n h f b
Ejemplo: Calcular numéricamente el valor de la siguiente integral definida
22
0.2sin( )x x dx considerando3 y 9 subintervalos respectivamente.
1 1 2 3
2 4 5 6 7
3 8 9 10 11
3 3 3 2 3 1 3
(3 /8) ( ) 3 ( ) 3 ( ) ( )
(3 /8) ( ) 3 ( ) 3 ( ) ( )
(3 /8) ( ) 3 ( ) 3 ( ) ( )
.........
.........
(3 / 8) ( ) 3 ( ) 3 ( ) ( )
o
n n n n n
A h f x f x f x f x
A h f x f x f x f x
A h f x f x f x f x
A h f x f x f x f x
1
( )n
i
i
A R A
62
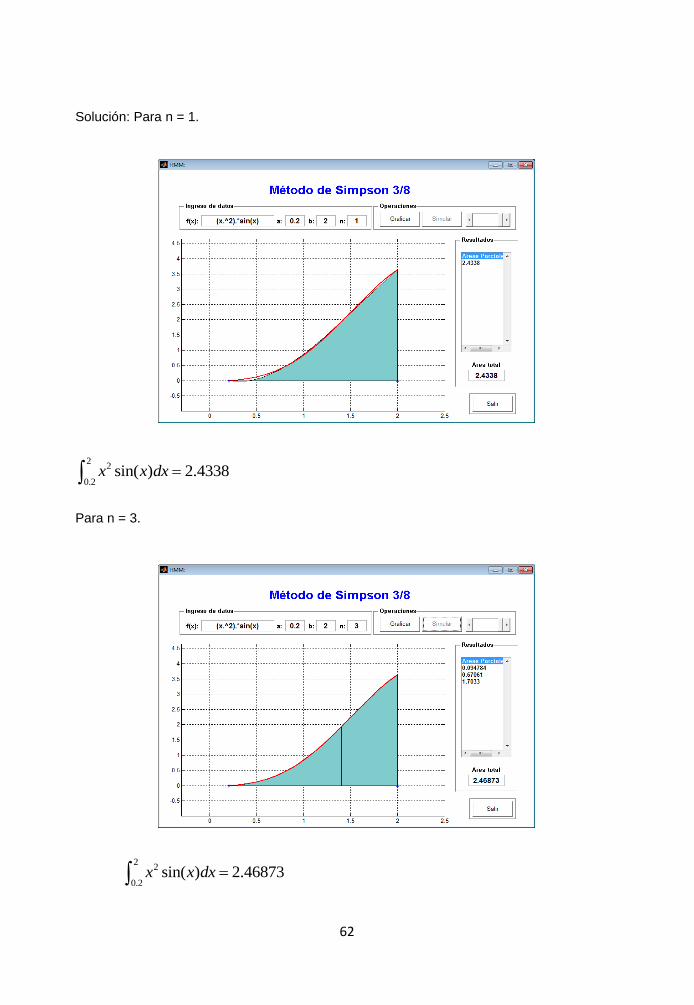
Solución: Para n = 1.
22
0.2sin( ) 2.4338x x dx
Para n = 3.
22
0.2sin( ) 2.46873x x dx
63
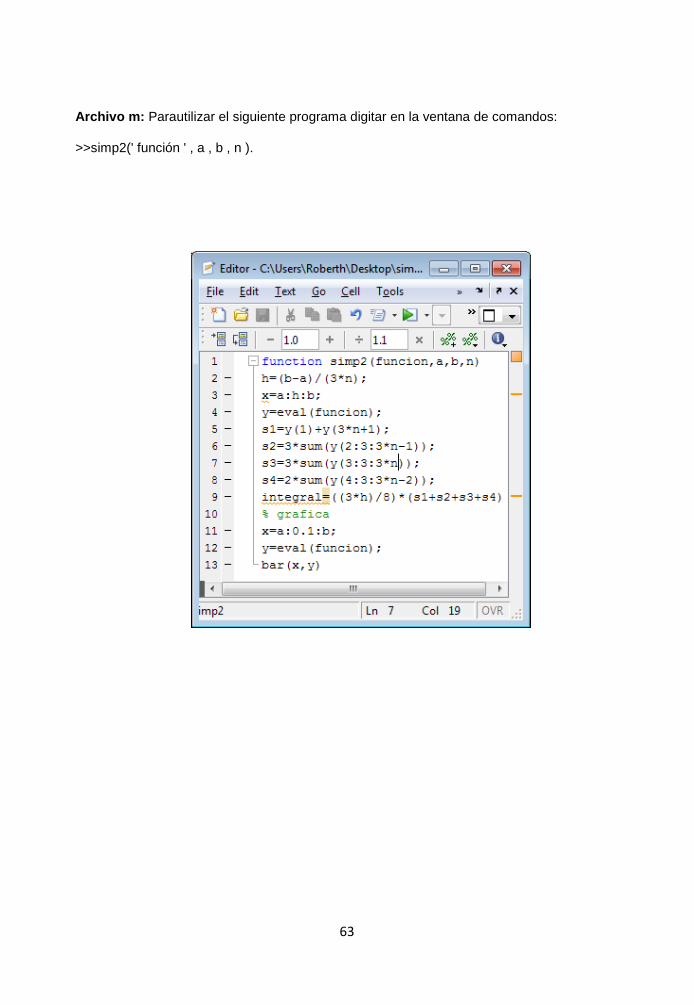
Archivo m: Parautilizar el siguiente programa digitar en la ventana de comandos:
>>simp2(' función ' , a , b , n ).

64
MÉTODO DE BOOLE
Sea : ,f a b una función continua y posit iva ( ( ) 0)f x en el intervalo
cerrado ,a b , y sea R la región plana limitada por las curvas ( )y f x , el eje
X , las rectas x a y x b , por los teoremas del cálculo integral el área de
R se define como:
( ) ( )b
aA R f x dx
Gráficamente:
Dividamos el intervalo ,a b en 4 subintervalos, esto es 4
b ah
y 0x a ,
1x a h , 2 2x a h , 3 3x a h , 4 .x b
Construyamos un polinomio interpolador 4 3 2( )P x Ax Bx Cx Dx E que
pase por los puntos 0 0 1 1 2 2 3 3 4 4( , ( )), ( , ( )), ( , ( )), ( , ( )) ( , ( )).x f x x f x x f x x f x y x f x
Si consideremos como una aproximación P f para el cálculo de la integral,
se obtiene:
( ) ( ) ( )
b b
a aA R f x dx P x dx
( ) ( / 45)[14 ( ) 64 ( ) 24 ( 2 ) 64 ( 3 ) 14 ( )]A R h f a f a h f a h f a h f b
65
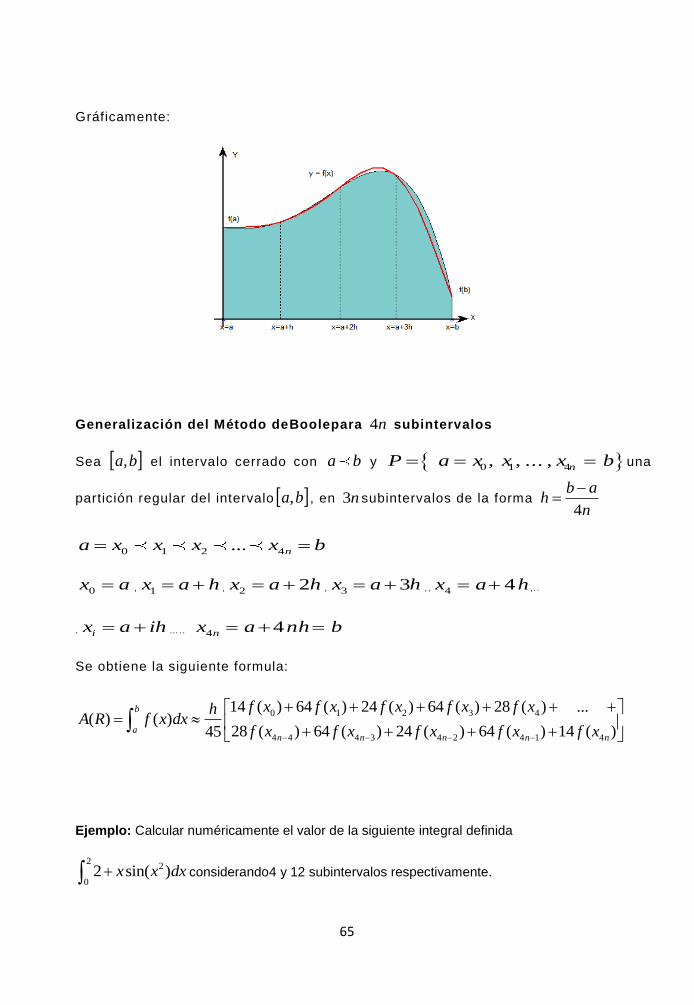
Gráficamente:
Generalización del Método deBoolepara 4n subintervalos
Sea ba, el intervalo cerrado con a b y 0 1 4, , ... , nP a x x x b una
partición regular del intervalo ba, , en 3n subintervalos de la forma 4
b ah
n
0 1 2 4... na x x x x b
0x a , 1x a h , 2 2x a h , 3 3x a h , , 4 4x a h , . .
. ix a ih ….. 4 4nx a nh b
Se obtiene la siguiente formula:
0 1 2 3 4
4 4 4 3 4 2 4 1 4
14 ( ) 64 ( ) 24 ( ) 64 ( ) 28 ( ) ...( ) ( )
28 ( ) 64 ( ) 24 ( ) 64 ( ) 14 ( )45
b
an n n n n
f x f x f x f x f xhA R f x dx
f x f x f x f x f x
Ejemplo: Calcular numéricamente el valor de la siguiente integral definida
22
02 sin( )x x dx considerando4 y 12 subintervalos respectivamente.
66
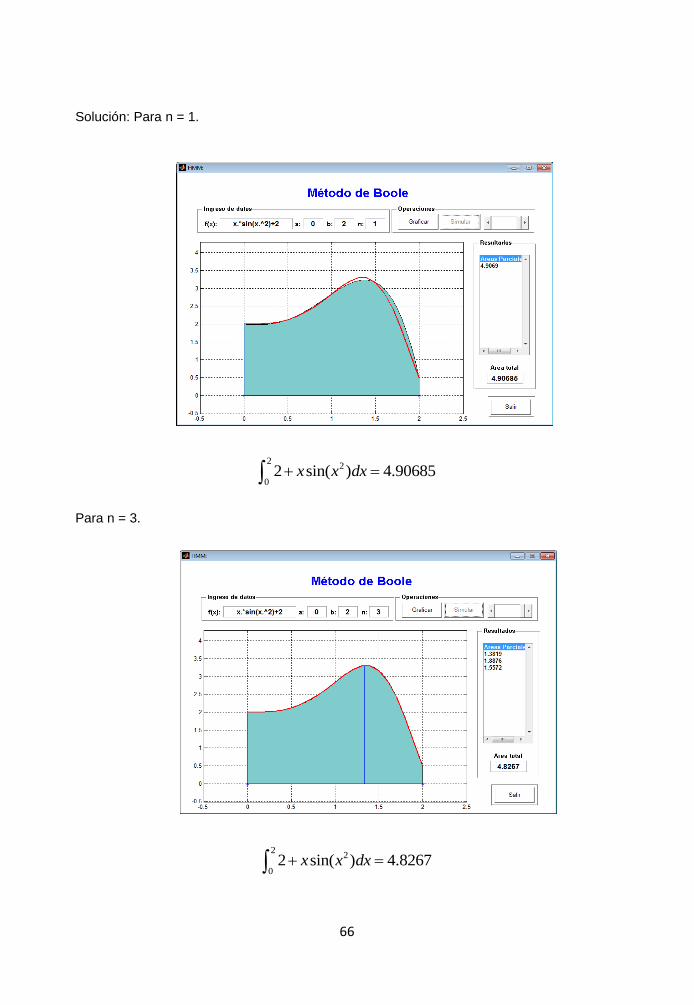
Solución: Para n = 1.
22
02 sin( ) 4.90685x x dx
Para n = 3.
22
02 sin( ) 4.8267x x dx
67
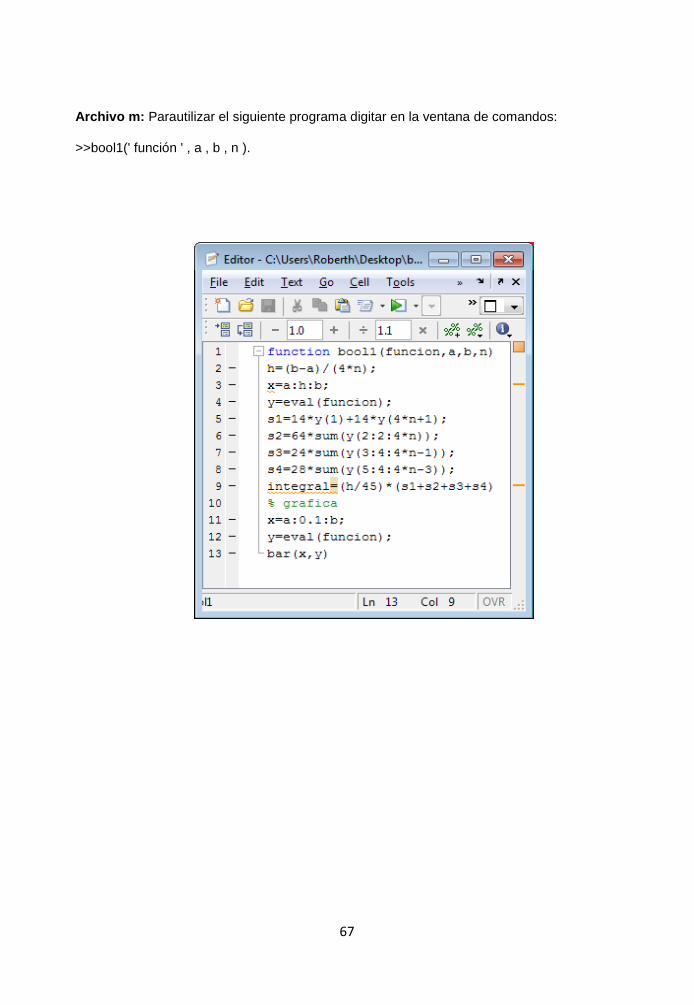
Archivo m: Parautilizar el siguiente programa digitar en la ventana de comandos:
>>bool1(' función ' , a , b , n ).
68
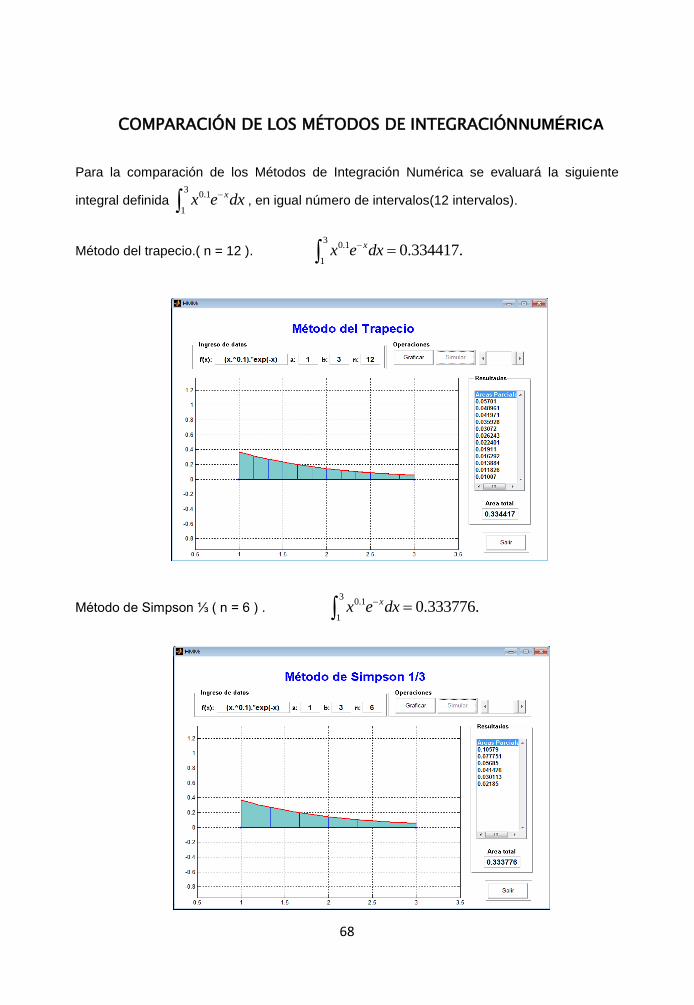
COMPARACIÓN DE LOS MÉTODOS DE INTEGRACIÓNNUMÉRICA
Para la comparación de los Métodos de Integración Numérica se evaluará la siguiente
integral definida 3
0.1
1
xx e dx
, en igual número de intervalos(12 intervalos).
Método del trapecio.( n = 12 ). 3
0.1
10.334417.xx e dx
Método de Simpson ⅓ ( n = 6 ) . 3
0.1
10.333776.xx e dx
69
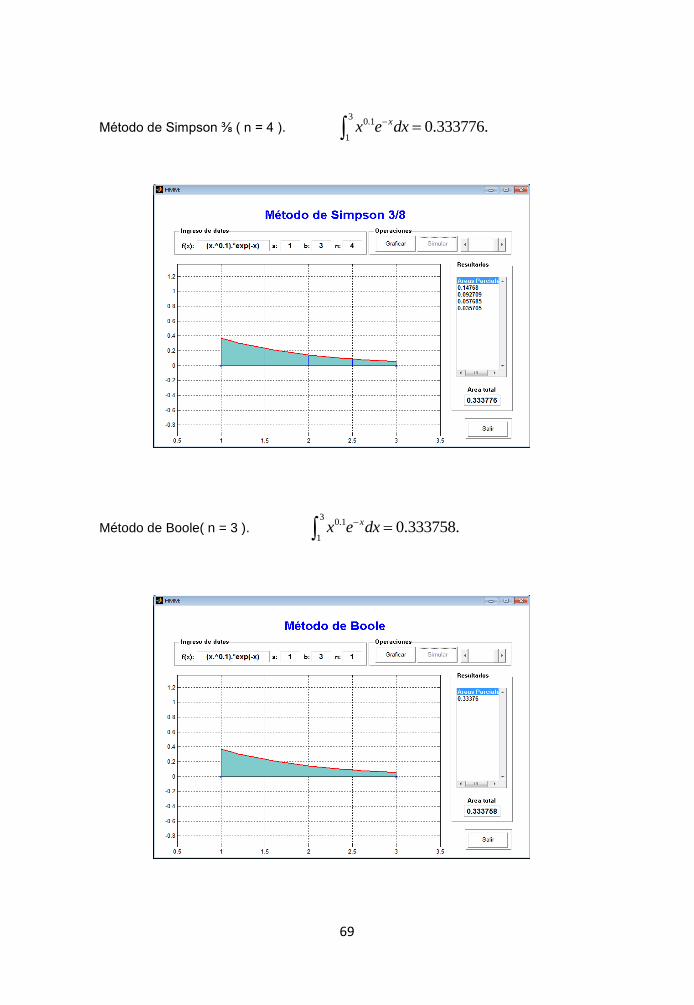
Método de Simpson ⅜ ( n = 4 ). 3
0.1
10.333776.xx e dx
Método de Boole( n = 3 ). 3
0.1
10.333758.xx e dx
70
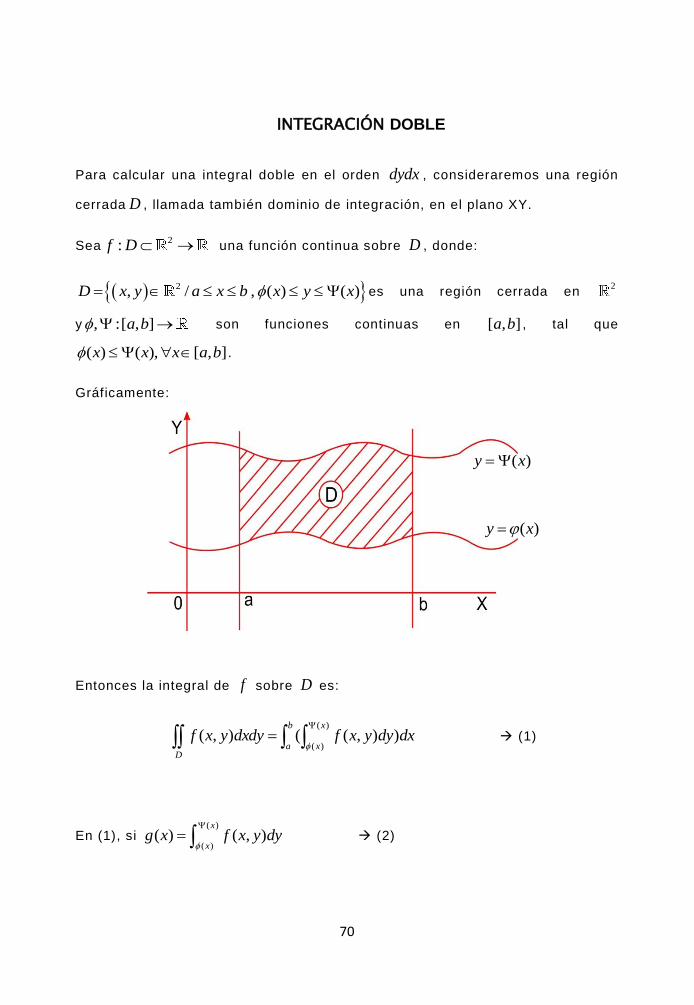
INTEGRACIÓN DOBLE
Para calcular una integral doble en el orden dydx , consideraremos una región
cerrada D , llamada también dominio de integración, en el plano XY.
Sea2:f D una función continua sobre D , donde:
2, / , ( ) ( )D x y a x b x y x es una región cerrada en 2
y , :[ , ]a b son funciones continuas en [ , ]a b , tal que
( ) ( ), [ , ]x x x a b .
Gráficamente:
Entonces la integral de f sobre D es:
)(
)()),((),(
x
xD
b
adxdyyxfdxdyyxf
(1)
En (1), si ( )
( )( ) ( , )
x
xg x f x y dy
(2)
( )y x
)(xy
71
Reemplazando (2) en (1), se tiene:
( )b
ag x dx (3)
Donde la integral (3) se puede calcular aplicando cualquiera de los métodos de
integración numérica estudiados en el capítulo anterior.