Embed Size (px)
Citation preview

Roman Kaula
WYBRANE METODY DOBORU NASTAW PARAMETRÓW
REGULATORA PID
POLITECHNIKA ŚLĄSKA
WYDZIAŁ GÓRNICTWA I GEOLOGII

PLAN WYKŁADU
Wprowadzenie
Kryterium Zieglera-Nicholsa
Metoda linii pierwiastkowych
Kryterium minimalizacji kwadratowego wskaźnika całkowego
Kryterium dopasowania modułu
Podsumowanie

obiekt
sterowania
z(t)
y(t)u(t)
Sterowanie , w układzie otwartym, jest to takie oddziaływanie na obiekt sterowania wielkością wejściową by wielkość wyjściowa przyjmowała żądane wartości , przy czym wielkość wyjściowa nie ma wpływu na wielkość wejściową.
Z tego względu wielkość wyjściowa może pod wpływem zakłóceń odchylać się znacznie od wartości zadanej.

Jeśli zakłócenie jest stałe to można skompensować jego wpływ przez odpowiedni dobór wielkości sterującej.
Jeśli jednak w układzie występują zakłócenia o dowolnej amplitudzie i w dowolnych chwilach czasu to lepiej jest mierzyć wielkość wyjściową i przy jej odchyleniach od wartości zadanej wypracować określony sygnał sterujący przeciwdziałający tym zakłóceniom.
Sposób ten nazywa się regulacją , a do jego realizacji potrzebny jest regulator.

SCHEMAT BLOKOWY UKŁADU REGULACJI
Obiekt
Regulator
y
e
yzad
u
u(t) – sygnał wyjściowy regulatora (sterujący),
e(t) – sygnał wejściowy regulatora (błędu regulacji), e(t)= yzad(t)-y(t).
Zadaniem regulatora jest wytwarzanie sygnałów
sterujących zapewniających żądany przebieg wielkości regulowanych w warunkach oddziaływania na te zmienne różnych zakłóceń.

Istnieje wiele rozwiązań regulatorów różniących się sposobem działania , strukturą , właściwościami w stanach przejściowych i ustalonych oraz rodzajem sygnałów wyjściowych.
Regulator realizujący takie funkcje został nazwany
regulatorem typu PID
Przyjęto, że klasyczny regulator powinien mieć możliwość realizacji działania
proporcjonalno-całkująco-różniczkującego

Lub w postaci uogólnionej:
dt
tdeKdtteKteKtu D
t
Ip
)()()()(
0
DrD
I
rI
rp
TkK
T
kK
kK
Zatem ogólne równanie regulatora typu PID ma postać:
dt
tdeTdtte
Ttektu D
t
I
r
)()(
1)()(
0
kr – wzmocnienie regulatora,
TI – czas całkowania, TD – czas różniczkowania.
Gdzie: Kp – wzmocnienie członu proporcjonalnego,
KI – wzmocnienie członu całkującego, KD – wzmocnienie członu różniczkującego.
Gdzie:

Transmitancja operatorowa regulatora PID
)()(1
)()( ssEKsEs
KsEKsU DIp
)1
()(
)()( sK
sKK
sE
sUsK DIpR

Dostosowanie regulatora do konkretnego
układu regulacji polega na takim nastawieniu jego
parametrów, przy którym przebiegi wartości
regulowanej spełnią wymogi przyjętego wskaźnika
jakości regulacji.
Proces ten nazywany jest:
Doborem nastaw regulatora

Kryteria (zapasu) stabilności Kryteria czasowe Kryteria całkowe Kryteria częstotliwościowe
Jakość procesów regulacji ocenia się za pomocą odpowiednio dobranych wskaźników jakości, zwanych kryteriami.
Do najczęściej stosowanych kryteriów jakości należą:

Przy braku informacji na temat modelu obiektu zwykle
stosuje się eksperyment Zieglera-Nicholsa.
Sposób doboru nastaw regulatora związany
jest ze stopniem identyfikacji regulowanego
obiektu.
Gdy znany jest model matematyczny obiektu lub znana jest
jego charakterystyka dynamiczna, możemy zastosować różne
metody analityczne doboru parametrów regulatora.

Eksperyment Zieglera-Nicholsa
Obiekt
Regulator
y
e
yzad
u
P
W metodzie tej regulator PID należy przełączyć tylko na działanie proporcjonalne.
Metoda drgań granicznych
Następnie należy stopniowo zwiększać wzmocnienie członu proporcjonalnego,
aż do wartości Kgr, dla której w układzie powstaną nietłumione oscylacje.
KROK 1
KROK 2

Metoda Typ regulatora kr TI TD
P grK5,0 - -
PI grK45,0 oscT85,0 -
drgań
granicznych
PID grK6,0 oscT5,0 oscT125,0
gdzie: kr., TI, TD – parametry regulatora
Nastawy regulatorów na podstawie reguł Zieglera-Nicholsa
Określa się nastawy, dla danego typu regulatora, na podstawie
parametrów Kgr i Tosc według tabeli
Mierzy się okres oscylacji Tosc. KROK 3
KROK 4

Parametry Kgr , Tosc można wyznaczyć także analitycznie korzystając
z warunków granicznych wynikających z kryterium Nyquista
Kryterium Nyquista pozwala badać stabilność zamkniętego układu regulacji
na podstawie charakterystyki amplitudowo-fazowej układu otwartego.
)(1
)()(
jK
jKjK
o
o
Z
Dla pewnej częstotliwości może zaistnieć przypadek, że będzie spełniony
warunek
)()()( jKjKjK Ro
Metoda drgań granicznych – Wyznaczenie parametrów analitycznie
1)( ro jK
r

Im {K(j )}
Re {K(j )}
=0= r
(-1,j0)
)(
1)(
gr
gro jK
1)}(Re{
0)}(Im{
gro
gro
jK
jK
Interpretacja wykresu charakterystyki częstotliwościowej
przy zastosowaniu kryterium Nyquista
układ na granicy stabilności
Analityczne przedstawienie warunków stabilności
lub
)( jK o

pR KjK )(
W metodzie drgań granicznych (Z-N) regulator PID
Na etapie nastawiania włączony jest tylko na człon proporcjonalny P
Krok 2
)(
1)(
gr
pgrgr KjK
1})(Re{
0})(Im{
pgrgr
pgrgr
KjK
KjK
gr
oscT2
lub
Rozwiązujemy układ równań względem
Wyznaczamy T osc
grgrK ,
Metoda drgań granicznych – Wyznaczenie parametrów analitycznie
Krok 1
Krok 3

Metoda linii pierwiastkowych
Obiekt
K(s)
Regulator
KR(s)
y
yzad
Obiekt i regulator są dane w postaci transmitancji
)(
)(1
)(
)(
)(1
)()(
'
'
sM
sLk
sM
sLk
skK
skKsK
o
o
Z
)()('
sKksK o)()('
sKksK RrR
)()()()()()('''
skKsKsKkksKsKsK oRroRo
)()(
)()(
skLsM
skLsKZ

DDefinicja
Liniami pierwiastkowymi nazywamy zbiór pierwiastków mianownika transmitancji układu zamkniętego dla zmieniającego się k

Idea metody
Na podstawie linii pierwiastkowych można przewidzieć zachowanie układu (bez znajomości odpowiedzi skokowej), ponieważ wiadomo w jakim obszarze pierwiastki są rzeczywiste, a w jakim zespolone

Przykład
Dla układu podanego na rysunku wykreślić linie pierwiastkowe
kss
k
)1s(s
1k1
)1s(s
1k
)s(K2Z
k41

Przy jakim k przeregulowanie wyniesie 16,3 %
2
nn
2
2
n
Zs2s
)s(K 2
nn2,11js
Przeregulowanie jednoznacznie określa biegun układu zamkniętego na liniach pierwiastkowych
21
Re
Imtg

2
1k4j
2
1)k(s 2,1
31k4Re
Im
1k

Kiedy przebiegi będą aperiodyczne krytyczne ?
Przebiegi aperiodyczne krytyczne otrzymujemy wybierając bieguny układu zamkniętego tak, aby były one rzeczywiste i aby było jak najwięcej biegunów wielokrotnych

Minimalizacja kwadratowego wskaźnika całkowego
Optymalne nastawy regulatora PID można wyznaczyć
korzystając z wartości minimalizującej wartości wskaźnika całkowego I2.
0
2
2 ])([ dteteI st
gdzie: e(t) – błąd regulacji,
est – wartość błędu w nowym stanie ustalonym.
Kwadratowy wskaźnik całkowy ma postać:

oraz układ zamknięty jest stabilny, czyli pierwiastki równania charakterystycznego
d s d s dn
n... 1 0 0
mają ujemne części rzeczywiste,
to wartość wskaźnika I2 może być wyznaczona na drodze
analitycznej,
.3,)(2
)2(
2,2
1,2
302130
32
2
03020
2
110
2
2
210
2
2
0
2
1
10
2
0
2
ndddddd
ddcddcccddc
nddd
dcdc
ndd
c
I o
Jeżeli transformata operatorowa błędu E(s) ma postać:
01
01
...
...)(
dsdsd
cscscsE
n
n
m
mgdzie n>m
przy wykorzystaniu następujących wzorów :

bs
asK )(
s
K
bs
asKsKsK I
R )()()(0
I
eaKbss
sbs
sKsK
2
0
)(
)(1
1)(
Wyznaczamy transmitancję operatorową układu otwartego:
Wyznaczamy transmitancję operatorową błędu regulacji:
Przykład
Dla układu o transmitancji
korzystając z kryterium wskaźnika całkowego I2, przy oddziaływaniu typowego wymuszenia yzad (t) =1(t).
KROK 1
KROK 2
wyznaczyć optymalną nastawę KI regulatora całkującego K sK
sR
I( )

baK
baKI
I
I
2
2
2
2
2
2
)2(
)(2)2(2
baK
baKaKbaKb
b
I
I
III
Wskaźnik I2, zgodnie z (wzorami), jest równy:
Minimalizując wskaźnik I2 względem parametru b otrzymujemy:
stąd wartość parametru KI minimalizująca wskaźnik całkowy I2:
a
bK
b
II
2
2 0
KROK 4
KROK 5
KROK 3 Wobec tego błąd E(s) przy wymuszeniu stałym:
IaKbss
bssE
2)(
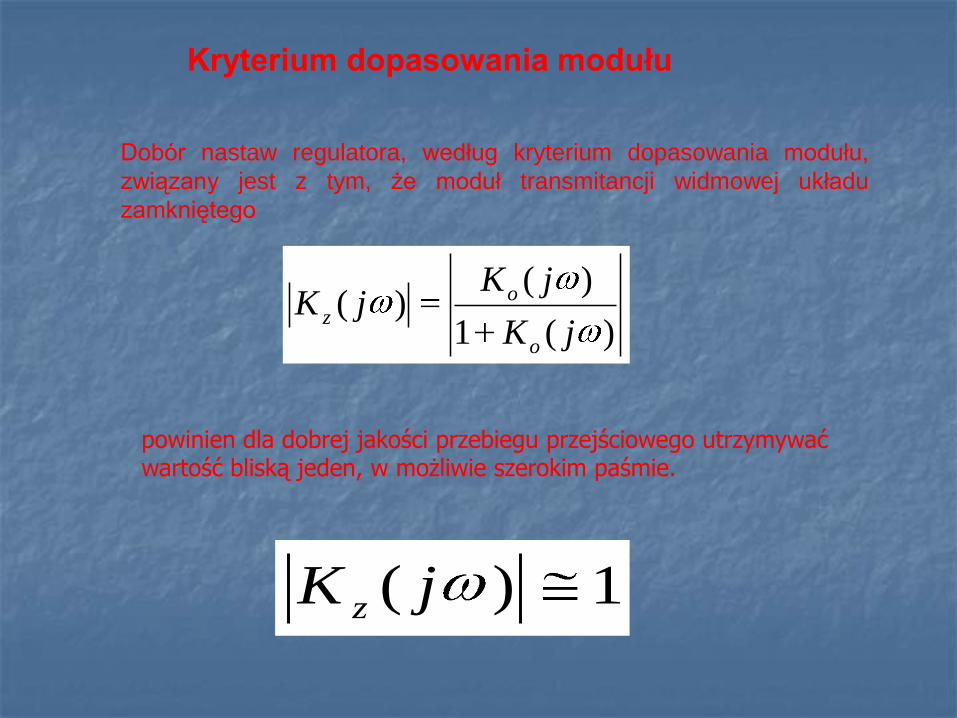
1)( jK z
Dobór nastaw regulatora, według kryterium dopasowania modułu,
związany jest z tym, że moduł transmitancji widmowej układu
zamkniętego
Kryterium dopasowania modułu
powinien dla dobrej jakości przebiegu przejściowego utrzymywać wartość bliską jeden, w możliwie szerokim paśmie.
)(1
)()(
jK
jKjK
o
o
z

K sa
s b( )
K sK
sR
I( )
Przykład
Dla układu o transmitancji
Korzystając z kryterium dopasowania modułu
dobierzemy optymalną nastawę regulatora całkującego o transmitancji

I
I
I
I
o
zaKsbs
aK
s
K
bs
a
s
K
bs
a
sK
sKsK
)(1
)(1
)()(
0
I
Iz
aKjbj
aKjK
)()(
222)()(
)((baK
aKjK
I
Iz
Wyznaczamy transmitancję operatorową układu zamkniętego:
Transmitancja widmowa układu zamkniętego ma postać:
Moduł transmitancji widmowej:
.
KROK 1
KROK 3
KROK 2

a
bK I
2
22
0
a
bK I
2
2
Z warunku :
Należy zauważyć, że dla
nastawa regulatora całkującego jest równa
.
KROK 4 1)( jK z
wynika :
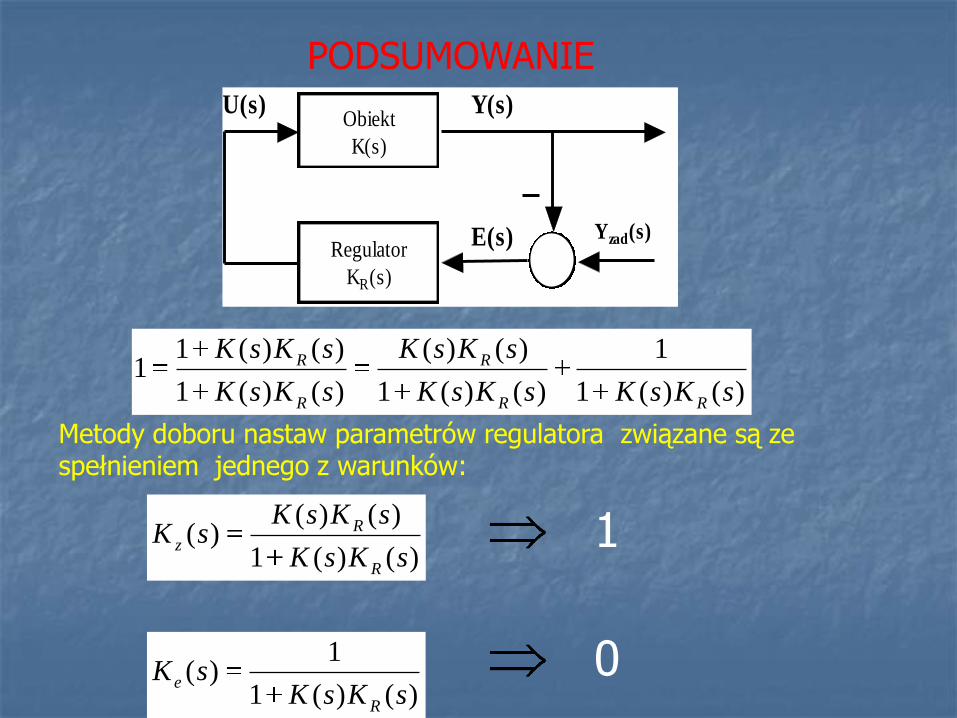
)()(1
1
)()(1
)()(
)()(1
)()(11
sKsKsKsK
sKsK
sKsK
sKsK
RR
R
R
R
Yzad(s)
Obiekt
K(s)
Regulator
KR(s)
Y(s)U(s)
E(s)
)()(1
)()()(
sKsK
sKsKsK
R
Rz
)()(1
1)(
sKsKsK
R
e
1
0
PODSUMOWANIE
Metody doboru nastaw parametrów regulatora związane są ze spełnieniem jednego z warunków:

PODSUMOWANIE
Kryterium dopasowania modułu
Minimalizacja kwadratowego wskaźnika całkowego
K sa
s b( ) K s
K
sR
I( )
a
bK
2
I
a
bK I
2
2
Dla omawianego przykładu
Nie ma jednego kryterium doboru nastaw parametrów regulatora spełniającego wszystkie wymagania jakości regulacji

DZIĘKUJĘ ZA UWAGĘ








![-4 EB & /4 P 4! A F - iieshrm.iriieshrm.ir/article-1-610-fa.pdf0 :T" 0 i* 0 i4D P2 ) T C 8 0 " T i> ^ a = 0 %I 0 3 _ T 8] &; 0 :T " \ :; 12 :T" S J M 0 6q2 " 0 T 5[ T" 0 &; 0 ;74](https://img.pdfslide.tips/doc/110x75/5e0ee84fd580a10274769da1/4-eb-4-p-4-a-f-t-0-i-0-i4d-p2-t-c-8-0-t-i-a-0.jpg)




![nmp - Universidad Nacional De Colombia D_tgb Mmlb D[kclqjml cq sl amlacnrm osc rmbmq rclckmq w osc nmbckmq _njga_p cl j_ np_arga_ as_lbm bcagkmq nmp ... [ 0 ,1] 3 ncp 0 l …](https://img.pdfslide.tips/doc/110x75/5ab0be247f8b9a00728b6bfd/nmp-universidad-nacional-de-dtgb-mmlb-dkclqjml-cq-sl-amlacnrm-osc-rmbmq-rclckmq.jpg)











![0 1] —t t] 799—0) 87-88-1112 - daino-h-ohta.akita-pref ... · 0 1] —t t] 799—0) 87-88-1112](https://img.pdfslide.tips/doc/110x75/6029fa9d5e45f30fdf2b414a/0-1-at-t-799a0-87-88-1112-daino-h-ohtaakita-pref-0-1-at-t-799a0.jpg)



