Embed Size (px)
Citation preview
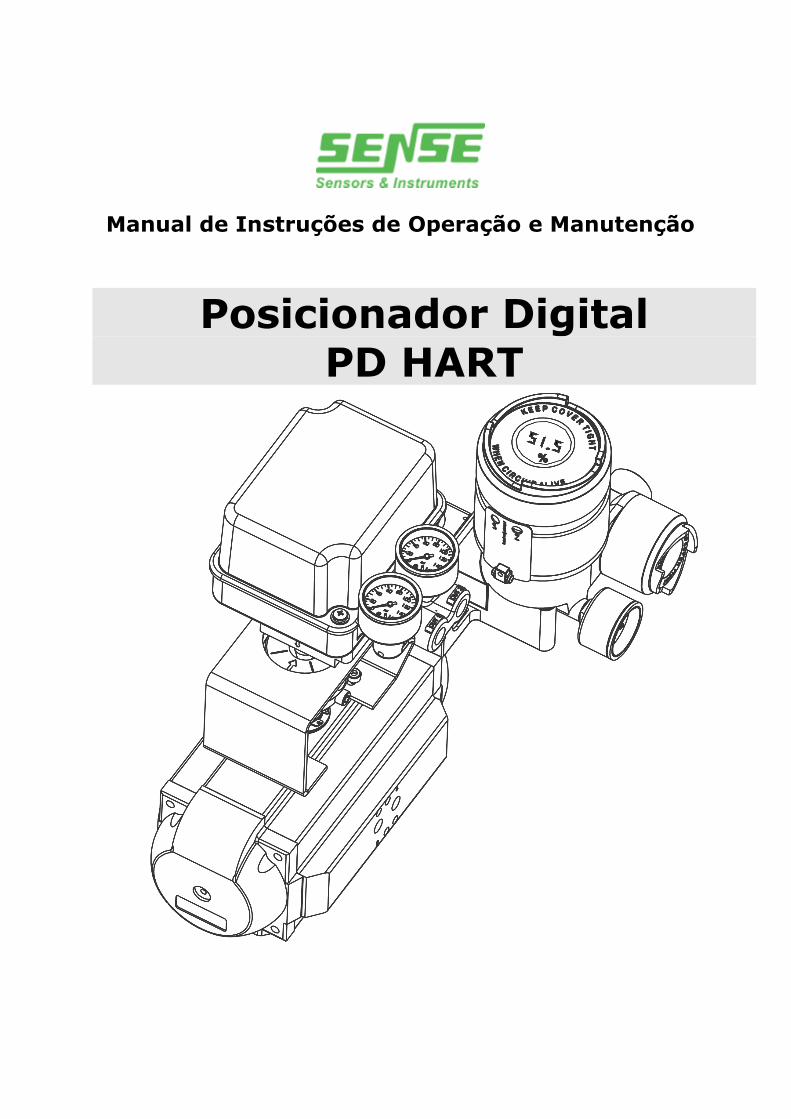
Manual de Instruções de Operação e Manutenção
Posicionador Digital
PD HART

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
2 / 43
1. INFORMAÇÕES GERAIS ......................................................................................................... 4
2. ESPECIFICAÇÕES .................................................................................................................. 5
2.1 ESPECIFICAÇÕES FUNCIONAIS ...................................................................................................... 5 2.2 ESPECIFICAÇÕES DE PERFORMANCE ................................................................................................ 6 2.3 ESPECIFICAÇÕES FÍSICAS ........................................................................................................... 6
3. DIMENSÕES .......................................................................................................................... 8
3.1 POSICIONADOR DIGITAL PD HART .................................................................................................. 8 3.2 IMÃ ROTATIVO ........................................................................................................................ 9 3.3 IMÃ LINEAR 30 MM ................................................................................................................... 9 3.4 IMÃ LINEAR 50 MM ................................................................................................................. 10 3.5 IMÃ LINEAR 100 MM ............................................................................................................... 10 3.6 SENSOR DE POSIÇÃO HALL REMOTO .............................................................................................. 11
4. DESCRIÇÃO ......................................................................................................................... 12
4.1 OPERAÇÃO .......................................................................................................................... 12 4.2 DISPLAY ............................................................................................................................. 13 4.3 MONITORAÇÃO ..................................................................................................................... 13
5. INSTALAÇÃO ....................................................................................................................... 13
5.1 IMÃ ROTATIVO E LINEAR ........................................................................................................... 14 5.2 MONTAGEM ATUADOR ROTATIVO .................................................................................................. 14 5.3 MONTAGEM ATUADOR LINEAR ..................................................................................................... 15 5.4 CONEXÕES PNEUMÁTICAS ......................................................................................................... 16 5.5 SUPRIMENTO DE AR ................................................................................................................ 18 5.6 CONEXÕES ELÉTRICAS ............................................................................................................. 18 5.7 RECOMENDAÇÕES PARA CERTIFICAÇÃO IP66W ................................................................................ 20 5.8 SENSOR DE POSIÇÃO REMOTO .................................................................................................... 20 5.9 INSTALAÇÕES EM ÁREAS CLASSIFICADAS ........................................................................................ 21
6. CONFIGURAÇÃO .................................................................................................................. 22
6.1 RECURSOS DE CONFIGURAÇÃO .................................................................................................... 23 6.2 IDENTIFICAÇÃO E DADOS DE FABRICAÇÃO ....................................................................................... 23 6.3 MONITORAÇÃO ..................................................................................................................... 23 6.4 CONFIGURAÇÃO DO EQUIPAMENTO ............................................................................................... 23 6.5 CONFIGURAÇÃO AVANÇADA ....................................................................................................... 24 6.6 MANUTENÇÃO DO EQUIPAMENTO.................................................................................................. 24 6.7 TRIM ................................................................................................................................. 24 6.8 CONFIGURAÇÃO AUTOMÁTICA ..................................................................................................... 24 6.9 MULTIDROP CONFIGURATION ...................................................................................................... 25 6.10 DIAGNÓSTICO .................................................................................................................... 25 6.11 BACKUP ............................................................................................................................ 25 6.12 FÁBRICA ........................................................................................................................... 25
7. PROGRAMAÇÃO LOCAL ........................................................................................................ 26
7.1 AJUSTE LOCAL ...................................................................................................................... 26 7.2 CHAVE MAGNÉTICA ................................................................................................................. 26 7.3 CONEXÃO DOS JUMPERS W1 E W2 .............................................................................................. 26 7.4 ÁRVORE DE PROGRAMAÇÃO LOCAL ................................................................................................ 27 7.5 PARÂMETROS AJUSTÁVEIS ......................................................................................................... 27
8. LISTA DE PEÇAS .................................................................................................................. 29
9. SOLUÇÃO DE PROBLEMAS ................................................................................................... 34
9.1 RECOMENDAÇÕES PARA MONTAGEM DE EQUIPAMENTOS APROVADOS COM A CERTIFICAÇÃO IP66 W .................... 34 9.2 DIAGNÓSTICO NÃO UTILIZANDO O CONFIGURADOR ............................................................................. 34 9.3 DIAGNÓSTICO UTILIZANDO O CONFIGURADOR .................................................................................. 35
10. MANUTENÇÃO ................................................................................................................... 36
10.1 RESTRIÇÃO ........................................................................................................................ 36 10.2 FILTRO ............................................................................................................................. 36
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
3 / 43
10.3 BORNEIRA ......................................................................................................................... 37 10.4 REGULADORA DE PRESSÃO ...................................................................................................... 37 10.5 TRANSDUTOR ..................................................................................................................... 38 10.6 MÓDULO MECÂNICO .............................................................................................................. 40 10.7 DIAFRAGMA DO POSICIONADOR ................................................................................................. 41 10.8 VÁLVULA CARRETEL............................................................................................................... 42
11. GARANTIA ......................................................................................................................... 43
11.1 RETORNO DE MATERIAIS ........................................................................................................ 43
© DIREITOS RESERVADOS 2015 SENSE
Sujeito a mudanças sem prévio aviso. Esta documentação técnica é protegida por direitos autorais. Tradução, fotocópias e reproduções de qualquer espécie ou edição de partes, especialmente reedição foto mecânicas ou reprodução eletrônica, armazenamento em sistemas ou redes, não são permitidas sem permissão do proprietário dos direitos autorais, o descumprimento estará sujeito a processos civis e criminais.
Sense Eletrônica
TUIUTI, 1237
TATUAPÉ – SÃO PAULO - BRASIL
CEP: 03081-012
TEL. +55 (11) 2145-0400

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
4 / 43
1. Informações gerais Este manual fornece instruções de operação,
calibração e manutenção do posicionador digital
PD HART.
O posicionador digital PD HART somente deve ser
instalado, operado e reparado por pessoal
qualificado com treinamento adequado. Para
maiores esclarecimentos, contate um
representante de vendas ou diretamente a Sense.
A modificação deste produto, a substituição de partes não originais e a utilização de procedimentos de manutenção fora do padrão determinado poderá afetar o funcionamento do equipamento e colocar em risco pessoas e equipamentos.
CUIDADO
Utilize somente os procedimentos condizentes e peças originais descritas neste manual.
Procedimentos não autorizados ou peças não originais podem afetar o funcionamento do produto
Os instrumentos são projetados para funcionar
com ar limpo, seco e livre de óleo. Os requisitos para a qualidade do ar de alimentação podem ser encontrados na norma ISA-S7.3 “Padrões de Qualidade para Ar de Instrumentos”.
ATENÇÃO
Ë altamente recomendável a utilização do filtro de ar coalescente para atingir os padrões determinados de ar de alimentação.
ATENÇÃO
As instalações feitas em áreas classificadas devem seguir as recomendações da norma
NBR/IEC60079-14.
A precisão da medição e do controle depende de muitas variáveis. Embora o posicionador tenha um desempenho de alto nível, uma instalação adequada é necessária para aproveitar ao máximo os benefícios oferecidos.
De todos os fatores que podem afetar a precisão do posicionador, as condições ambientais são as mais difíceis de controlar. Entretanto, há maneiras de se reduzir os efeitos da temperatura, umidade e vibração.
Os efeitos provocados pela variação da
temperatura podem ser minimizados montando-se o posicionador em áreas protegidas de mudanças ambientais.
O posicionador digital PD HART deve ser instalado de forma a evitar ao máximo a exposição direta
aos raios solares ou ambientes quentes. Evite instalação próxima de linhas ou vasos com alta temperatura. Caso isso não seja possível, recomenda-se o uso do posicionador com montagem remota do sensor de posição.
CUIDADO
O posicionador digital PD HART foi projetado para
operar em faixas específicas de temperaturas. Utilizar em temperatura diferente da especificada poderá causar danos, mau funcionamento do posicionador ou a perda de controle do processo.
Use isolação térmica para proteger o posicionador de fontes externas de calor se for necessário.
A umidade é inimiga dos circuitos eletrônicos. Os anéis de vedação das tampas da carcaça devem
ser colocados corretamente, principalmente nas áreas com alto índice de umidade relativa. Evite retirar as tampas da carcaça no campo, pois cada abertura introduz mais umidade nos circuitos.
O circuito eletrônico tem revestimento à prova de
umidade, mas exposições constantes podem comprometer esta proteção. Use vedante adequado nas conexões elétricas de acordo com o método de selagem e a classificação de áreas perigosas para evitar a penetração de umidade.
CUIDADO
Evitar o uso de fita veda rosca nas entradas e saídas ar, pois esse tipo de material pode soltar pequenos resíduos e entupir as entradas e saídas, comprometendo assim a eficiência do equipamento.
Evite montagens próximas de bombas, turbinas
ou de outros equipamentos que gerem uma vibração excessiva. Se não for possível evitar essas vibrações, recomenda-se o uso do
posicionador com montagem remota do sensor de posição.

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
5 / 43
2. Especificações
2.1 Especificações funcionais
Curso Movimento Linear: 3 - 100 mm Movimento Rotativo: 30 - 120
Sinal de Entrada 4-20 mA, a dois fios.
Alimentação
Fornecida pelo loop de corrente 4-20 mA. Não necessita de fonte externa. Impedância de Entrada 550 .
Corrente Mínima 3.8 mA.
Protocolo de Comunicação Protocolo de Comunicação Hart@ (é modulado sobre o sinal de corrente). Proteção contra Polaridade Reversa Não ocorrem danos ao equipamento se a fonte de alimentação de corrente (4-20 mA) for invertida ou se aplicar erroneamente uma corrente até 50 mA (entre ± 60 Vdc).
Saída
Saída para atuador de 0 a 100% da fonte de pressão de ar fornecida. Ação simples ou dupla. Suprimento de Ar 40 a 150 psi - livre de óleo, sujeira e água.
Indicação Indicador digital (LCD) de 4 ½-dígitos numéricos e 5 caracteres alfanuméricos (Display de Cristal Líquido). Certificações em Área Classificada (Veja apêndice “A”) A prova de explosão e intrinsicamente seguro.
Projetado para atender a Diretiva Europeia 2004/108/EC. Limites de Temperatura Ambiente: -20 a 70C.
Armazenagem: -40 a 90C.
Indicador: -10 a 75C operação,
-40 a 85C sem danos.
Sensor Remoto: -40 a 105ºC
Limites de Umidade 0 a 100% RH (umidade relativa) Característica de Vazão Linear, igual porcentagem, abertura rápida e curva de 16 pontos livremente configuráveis via
configurador. Sensor de Posição Imã (sem contato), por efeito Hall. Disponíveis na versão integral ou montagem remota
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
6 / 43
Configuração Ajuste local através de chave magnética. Não é necessário abrir a tampa. Remotamente através de HPC401 configurador baseado em Palm OS
Auto Setup Procedimento de ajuste automático de desempenho e curso do atuador. O procedimento de calibração utiliza os limites de curso do atuador de 0% e 100% como pontos de calibração e calcula o melhor ajuste de ganho do conversor A/D buscando a melhor performance contra instabilidades internas antes de se tornarem aparentes no comportamento do curso.
Faixa de ganho proporcional, integral e derivada Ajustável localmente ou via configuração Ajustável automaticamente durante procedimento de Auto Tuning ou Full Setup
2.2 Especificações de performance
Resolução 0.1 % F.E. (fundo de escala) Repetibilidade 0.1 % F.E.
Histerese 0.1 % F.E. Consumo de ar 0.31 SCFM @ 60 psi
Vazão de saída 11 SCFM @ 60 psi
Efeito da temperatura ambiente 0.05%/C F.E.
Efeito da pressão de alimentação Desprezível Efeito da vibração Testado conforme a IEC 60068-2-9. Uma busca pela frequência de ressonância é executada nos três eixos. O instrumento é submetido ao teste de resistência por 30 minutos em cada ressonância principal.
Efeito da interferência eletromagnética Projetado para atender a Diretiva Europeia 2004/108/EC.
2.3 Especificações físicas
Conexão elétrica ½” - 14 NPT Pg 13.5 e M20x1.5 opcionais através de adaptadores Invólucro elétrico
IP66W Conexões pneumáticas Pressão de alimentação: conexão fêmea 1/4-18 NPT Pressão de saída 1 e 2: duas conexões fêmeas 1/4-18 NPT Manômetros: três conexões fêmeas 1/8-27 NPT

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
7 / 43
Material de construção
carcaça : alumínio com baixo teor de cobre o-ring: borracha nitrílica diafragma: borracha nitrílica
Peso Alumínio: 3.5 Kg Sensor remoto: 0,26 Kg Cabo: 1 kg

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
8 / 43
3. Dimensões
3.1 Posicionador digital PD HART
Figura 1. Dimensões posicionador digital

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
9 / 43
3.2 Imã rotativo
Figura 2. Dimensões imã rotativo
3.3 Imã linear 30 mm
Figura 3. Dimensões imã linear 30 mm
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
10 / 43
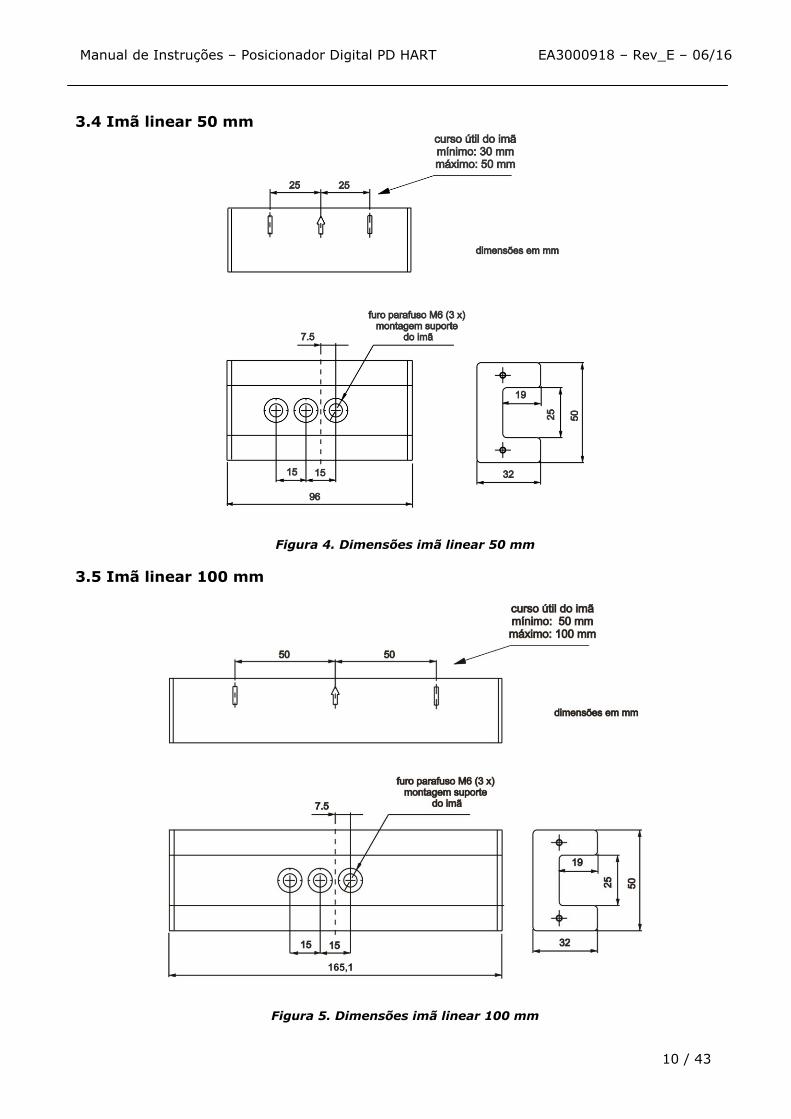
3.4 Imã linear 50 mm
Figura 4. Dimensões imã linear 50 mm
3.5 Imã linear 100 mm
Figura 5. Dimensões imã linear 100 mm
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
11 / 43
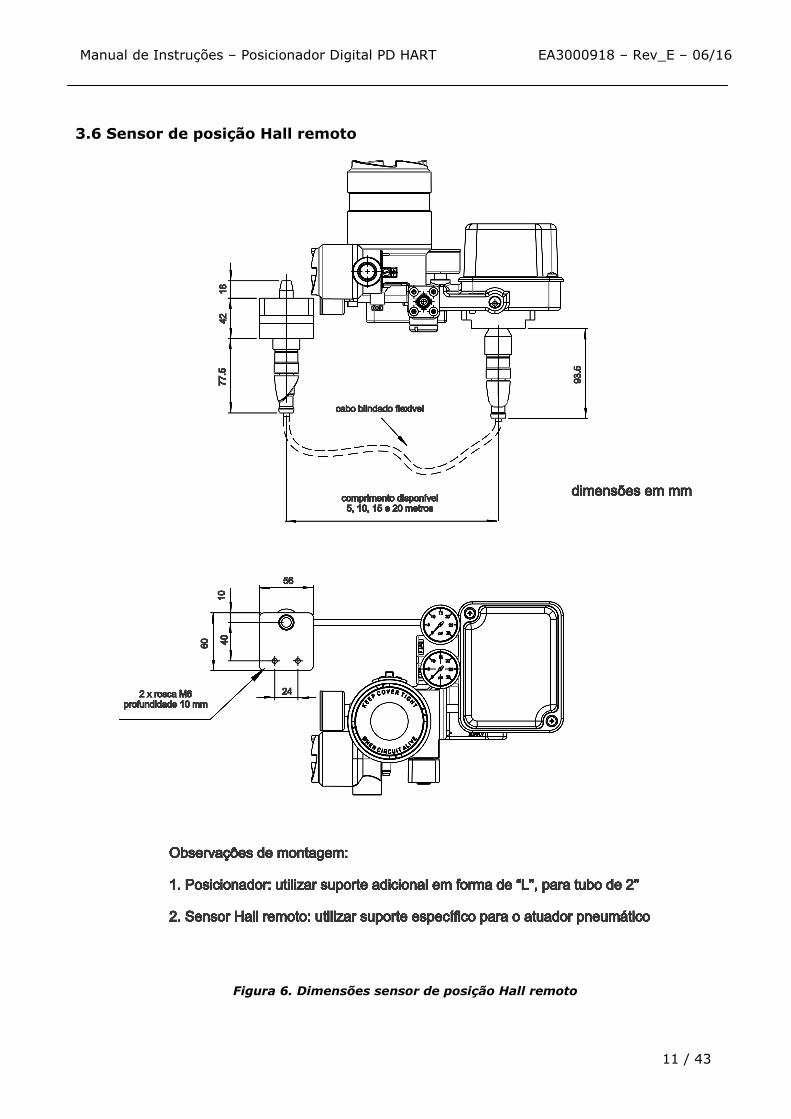
3.6 Sensor de posição Hall remoto
Figura 6. Dimensões sensor de posição Hall remoto

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
12 / 43
4. Descrição
4.1 Operação
A Figura 7 descreve o diagrama de bloco do posicionador digital PD HART. O controle da posição é baseado no equilíbrio de dois sinais: um proporcional ao sinal de entrada e outro proporcional a posição da haste do atuador.
O algoritimo do micro controlador compara o sinal de entrada da sala de controle e o sinal de realimentação do sensor Hall e determina a
corrente para enviar para a bobina eletromagnética.
À medida que aumenta o sinal de entrada, a corrente nas bobinas eletromagnéticas aumenta. Isso cria uma atração magnética entre o bico e a palheta, causando a restrição do bico pela palheta, o que aumenta a pressão do bico.
O aumento da pressão do bico provoca um deslocamento no diafragma, que empurra a mola de retorno, fazendo a abertura da válvula de carretel. Isso abre as saídas da válvula de carretel,
fornecendo ar para a pressão de saída 1 e exaustão do ar de pressão de saída 2. O aumento da pressão de saída 1 faz com que a haste do atuador se mova. Posição da haste é detectada através do sistema
sem contato físico do sensor Hall, que está eletricamente conectado a placa analógica. A haste da válvula continua a se mover até a
posição correta da ser atingida. Neste ponto, a placa principal estabiliza a corrente de bobina eletromagnética e a válvula carretel está no sua
posição de equilíbrio. Uma diminuição do sinal de entrada reverte as ações acima descritas, provocando um movimento contrário, proporcional a haste do atuador.
Figura 7. Diagrama de bloco
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
13 / 43
4.2 Display
O display digital LCD é necessário para sinalização e para operação no ajuste local.
Durante a operação normal, o posicionador permanece em modo de monitoração e o display indica a posição da válvula em porcentagem. Existe a opção selecionar, no configurador, o setpoint no display. O modo de programação local é ativado
pela chave de fenda magnética quando inserida no orifício marcado pela letra “Z”, em cima da carcaça.
As possíveis indicações de configuração e de monitoração estão mostradas na Figura 8.
O posicionador digital inicializa a indicação de
posição no display após ser alimentado. Mostra o modelo do posicionador digital e a versão do software (X.XX).
Figura 8. Display
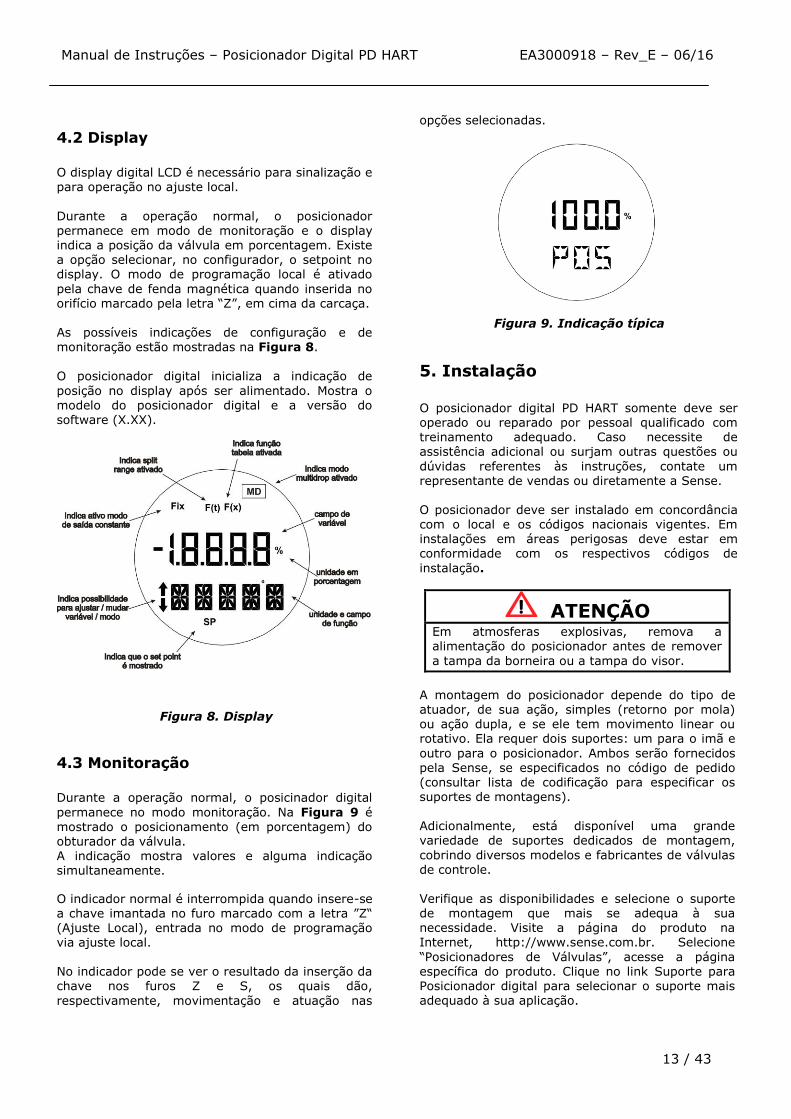
4.3 Monitoração
Durante a operação normal, o posicinador digital
permanece no modo monitoração. Na Figura 9 é
mostrado o posicionamento (em porcentagem) do obturador da válvula. A indicação mostra valores e alguma indicação simultaneamente.
O indicador normal é interrompida quando insere-se a chave imantada no furo marcado com a letra ”Z“ (Ajuste Local), entrada no modo de programação via ajuste local.
No indicador pode se ver o resultado da inserção da chave nos furos Z e S, os quais dão,
respectivamente, movimentação e atuação nas
opções selecionadas.
Figura 9. Indicação típica
5. Instalação
O posicionador digital PD HART somente deve ser operado ou reparado por pessoal qualificado com treinamento adequado. Caso necessite de assistência adicional ou surjam outras questões ou
dúvidas referentes às instruções, contate um representante de vendas ou diretamente a Sense. O posicionador deve ser instalado em concordância com o local e os códigos nacionais vigentes. Em instalações em áreas perigosas deve estar em conformidade com os respectivos códigos de
instalação.
ATENÇÃO Em atmosferas explosivas, remova a alimentação do posicionador antes de remover
a tampa da borneira ou a tampa do visor.
A montagem do posicionador depende do tipo de atuador, de sua ação, simples (retorno por mola) ou ação dupla, e se ele tem movimento linear ou rotativo. Ela requer dois suportes: um para o imã e
outro para o posicionador. Ambos serão fornecidos pela Sense, se especificados no código de pedido (consultar lista de codificação para especificar os suportes de montagens).
Adicionalmente, está disponível uma grande variedade de suportes dedicados de montagem,
cobrindo diversos modelos e fabricantes de válvulas de controle. Verifique as disponibilidades e selecione o suporte de montagem que mais se adequa à sua necessidade. Visite a página do produto na Internet, http://www.sense.com.br. Selecione
“Posicionadores de Válvulas”, acesse a página específica do produto. Clique no link Suporte para Posicionador digital para selecionar o suporte mais adequado à sua aplicação.
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
14 / 43
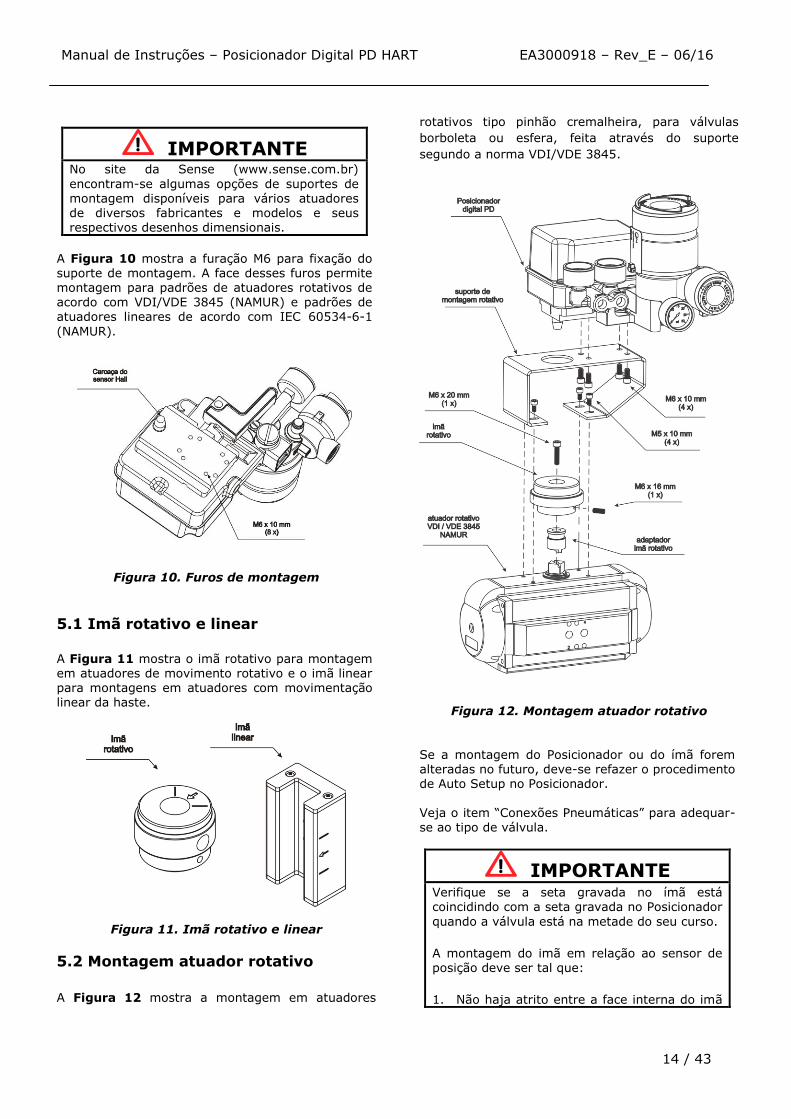
IMPORTANTE No site da Sense (www.sense.com.br)
encontram-se algumas opções de suportes de montagem disponíveis para vários atuadores de diversos fabricantes e modelos e seus respectivos desenhos dimensionais.
A Figura 10 mostra a furação M6 para fixação do suporte de montagem. A face desses furos permite montagem para padrões de atuadores rotativos de acordo com VDI/VDE 3845 (NAMUR) e padrões de atuadores lineares de acordo com IEC 60534-6-1
(NAMUR).
Figura 10. Furos de montagem
5.1 Imã rotativo e linear
A Figura 11 mostra o imã rotativo para montagem em atuadores de movimento rotativo e o imã linear para montagens em atuadores com movimentação linear da haste.
Figura 11. Imã rotativo e linear
5.2 Montagem atuador rotativo
A Figura 12 mostra a montagem em atuadores
rotativos tipo pinhão cremalheira, para válvulas
borboleta ou esfera, feita através do suporte
segundo a norma VDI/VDE 3845.
Figura 12. Montagem atuador rotativo
Se a montagem do Posicionador ou do ímã forem alteradas no futuro, deve-se refazer o procedimento de Auto Setup no Posicionador. Veja o item “Conexões Pneumáticas” para adequar-
se ao tipo de válvula.
IMPORTANTE Verifique se a seta gravada no ímã está coincidindo com a seta gravada no Posicionador
quando a válvula está na metade do seu curso.
A montagem do imã em relação ao sensor de posição deve ser tal que:
1. Não haja atrito entre a face interna do imã

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
15 / 43
e a saliência do sensor de posição durante a sua excursão (rotativo ou linear), através
do imã.
2. O imã e a saliência do sensor de posição não estejam distantes.
Recomenda-se uma distância mínima de 2 mm e máxima de 4 mm entre a face externa do imã e a face do posicionador.
1. Monte o suporte do ímã na extremidade do atuador (NAMUR). A ponta do eixo da válvula deve estar de acordo com o padrão Namur. Use
o parafuso M6 para fixar o suporte.
2. Monte o imã no adaptador NAMUR. Não aperte completamente os parafusos permitindo a rotação do imã.
3. O posicionador digital PD HART pode ser
montado em uma das duas possíveis orientações de montagem. Determine a orientação desejada e siga para o próximo passo.
4. Coloque os quatro parafusos M5 fixando o
suporte rotativo no atuador.
5. Coloque os quatro parafusos M6 fixando o
posicionador digital no suporte de montagem. A montagem do imã em relação ao sensor de
posição deve ser tal que forma que não ocorra atrito entre a face interna do imã e a carcaça
do sensor de posição durante a sua excursão do imã rotativo.
6. Posicione a válvula em 50% do curso. Verifique se a seta gravada no imã está coincidindo com a seta gravada no posicionador quando a válvula está na metade do curso (50%) e aperte os dois parafusos M6. Ver Figura 13.
7. Verifique durante o curso do atuador se a seta
do posicionador permanece entre as barras de limites máximos de indicação no imã.
Figura 13. Ajuste imã rotativo
5.3 Montagem atuador linear
A Figura 14 mostra a montagem em atuadores
lineares tipo diafragma e pistão, tipicamente para
válvula globo, com a montagem feita através do
suporte segundo a norma IEC 60534-6-1 (NAMUR).
Se a montagem do Posicionador ou do ímã forem alteradas no futuro, deve-se refazer o procedimento de Auto Setup no Posicionador.
Veja o item “Conexões Pneumáticas” para adequar-se ao tipo de válvula.
IMPORTANTE Verifique se a seta gravada no ímã está coincidindo com a seta gravada no Posicionador quando a válvula está na metade do seu curso.
A montagem do imã em relação ao sensor de posição deve ser tal que:
1. Não haja atrito entre a face interna do imã e a saliência do sensor de posição durante a sua excursão (rotativo ou linear), através do imã.
2. O imã e a saliência do sensor de posição não estejam distantes.
Recomenda-se uma distância mínima de 2 mm
e máxima de 4 mm entre a face externa do imã e a face do Posicionador.

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
16 / 43
Figura 14. Montagem atuador linear
1. Monte o suporte do imã no eixo da válvula. Use
os dois parafusos M6 para fixar o suporte.
2. Monte o imã linear no suporte do imã. Use os dois parafusos M6 para fixar o imã.
3. Monte o suporte linear sobre a torre do atuador
usando o parafuso M8 com arruela. Não aperte
completamente o parafuso permitindo o ajuste fino da posição do suporte.
4. Coloque os quatro parafusos M6 fixando o posicionador digital no suporte de montagem. A montagem do imã em relação ao sensor de
posição deve ser tal que forma que não ocorra atrito entre a face interna do imã e a carcaça do sensor de posição durante a excursão do imã linear.
4. Posicione a válvula em 50% do curso. Verifique se a seta gravada no imã está coincidindo com a seta gravada no posicionador quando a
válvula está na metade do curso (50%) e
aperte os dois parafusos M8. Ver figura 15.
5. Verifique durante o curso do atuador se a seta do posicionador permanece entre as barras de limites máximos de indicação no imã.
Figura 15. Ajuste do imã linear
5.4 Conexões pneumáticas
O ar para alimentar o posicionador digital deve ser "ar com qualidade para instrumentação”, seco, limpo e não corrosivo. Consulte a American
National Standard "Quality Standard for Instrument Air" (ANSI/ISA S7.0.01 - 1996). O posicionador digital pode ser fornecido com filtros na entrada de ar, mas a presença desse filtro não substitui um tratamento preliminar do ar de instrumentação. Recomendamos uma limpeza
periódica dos filtros a cada 6 meses ou menos, caso a qualidade do ar de instrumentação não seja boa.
ATENÇÃO
Para atingir este padrão, é altamente
recomendada a utilização de filtro coalescente
para o ar de suprimento.
A pressão do ar de alimentação do posicionador deve ser no mínimo de 40 psi e no máximo 150 psi. Deve-se respeitar a máxima pressão de alimentação do atuador. Pressão abaixo desta faixa
de trabalho compromete o funcionamento do

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
17 / 43
Posicionador. Pressão acima desta faixa de trabalho pode danificar o Posicionador. As duas saídas pneumáticas trabalham em direções opostas para abrir ou fechar a válvula.
CUIDADO
Se ocorrer uma falha no posicionador, como por
exemplo, a perda da alimentação (sinal de entrada de 4-20 mA), a saída marcada com OUT1 (Saída 1) permanece próxima de zero e a saída marcada com OUT2 (Saída 2) permanece próxima ao valor da pressão de suprimento de ar.
O Posicionador pode ser especificado com manômetros nas saídas de pressão. As indicações dos manômetros são somente referências e, portanto, com menos exatidão.
CUIDADO
Evitar o uso de fita veda rosca nas entradas e
saídas ar, pois esse tipo de material pode soltar pequenos resíduos e entupir as entradas e saídas, comprometendo assim a eficiência do equipamento.
As conexões pneumáticas são marcadas com IN (entrada) para o suprimento de ar, e OUT 1 e OUT
2, respectivamente, para a Saída 1 e Saída 2. Use conexões de 1/4 NPT. Pode-se usar vedante para as roscas NPT. Conecte o suprimento de ar na conexão
marcada com IN (entrada). Verifique se o suprimento de ar não excede o máximo permitido pelo posicionador ou atuador.
ATENÇÃO Após a perda de sinal de entrada, a válvula de controle irá abrir ou fechar de acordo com a sua aplicação. Verifique se a ação de controle está correta (ar para abrir ou ar para fechar) para coincidir com o dispositivo de controle.
O posicionador tem ao todo dois orifícios de
exaustão, um somente provido de filtro. É importante que estas saídas não sejam obstruídas
ou bloqueadas, pois o ar deve circular livremente. Em caso de pintura da carcaça do conversor, remover o filtro para evitar sua obstrução com a tinta. Os orifícios devem ser inspecionados regularmente para garantir que não obstruam a exaustão.
CUIDADO
A porta de exaustão deve sempre estar livre de obstrução para garantir perfeito funcionamento do posicionador.
Ação Dupla - Ar para abrir (fecha na falha) Conecte a Saída 1 (OUT1) do Posicionador na
entrada ABRIR (OPEN) do atuador e conecte a Saída 2 (OUT2) do Posicionador na entrada FECHAR (CLOSE) do atuador.
Ação Dupla - Ar para fechar (abre na falha) Conecte a Saída 2 (OUT2) do Posicionador na entrada ABRIR (OPEN) do atuador e conecte a
Saída 1 (OUT 1) do Posicionador para a entrada
FECHAR (CLOSE) do atuador.
Ação Simples
Conecte a Saída 1 (OUT1) do Posicionador na
entrada do atuador. Use um bujão para fechar
a Saída 2 (OUT2).
ATENÇÃO
Ao conectar o posicionador a um atuador de ação simples, a conexão de SAÍDA 2 deve ser tapada.
A Figura 16 mostra as conexões de pressão do
posicionador digital.
Figura 16. Conexões pneumáticas
Todas as conexões são de 1/4-18 NPT fêmeas. Para aplicações que necessitem grandes volumes de ar, utilize no mínimo tubulação de 3/8 de polegada (10 mm). Ligue a pressão de alimentação após fazer as conexões pneumáticas.

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
18 / 43
A válvula carretel purga constantemente uma
pequena quantidade da pressão de alimentação dentro da área sob a tampa. Essa pressão positiva interna criada pela purga garante que as partículas de sujeiras externas não penetrem no instrumento. A abertura da exaustão na traseira da carcaça deve
ser mantida aberta para evitar contrapressão interna. A Figura 17 mostra a localização da porta de exaustão.
Figura 17. Portas de exaustão
5.5 Suprimento de ar
Antes do ar de instrumentação ser conectado ao
posicionador, recomendamos que a mangueira seja aberta livremente durante 2 a 3 minutos para permitir a eliminação de qualquer contaminação.
Dirija o jato de ar em um filtro de papel, com o objetivo de apanhar qualquer água, óleo ou outros
materiais impuros. Se esse teste indicar que o ar
está contaminado, ele deve ser substituído por um ar recomendado (Vide recomendações para um sistema de ar de instrumentação).
Assim que o posicionador estiver conectado e inicializado, a vazão de ar interno irá oferecer proteção contra corrosão e prevenir a entrada de
umidade. Por este motivo, a pressão de ar de alimentação deve ser sempre mantida.
5.6 Conexões elétricas
O acesso dos cabos de sinal aos terminais de ligação pode ser feito pela passagem na carcaça
podendo ser conectadas a um eletroduto ou
prensa-cabo. O bloco de ligação possui parafusos que podem receber terminais tipo garfo ou olhal,
ver Figura 18.
ATENÇÃO Em caso de opção do usuário por proteção contra ruídos induzidos por descargas atmosféricas, sobrecargas, máquinas de solda e máquinas em geral, será necessário instalar um protetor de
transiente. (Protetor adquirido separadamente).
Figura 18. Conexões elétricas
ÁREAS CLASSIFICADAS Em áreas classificadas, com potencial risco de
explosão, onde se exige o tipo de proteção à prova de explosão (Ex d), as tampas devem ser apertadas com no mínimo 8 voltas.
Para evitar a entrada de umidade ou de gases corrosivos, aperte as tampas até o O’ring ter contato com a carcaça e, então, dê mais um terço de volta (120°) para garantir a vedação.
Trave as tampas através dos parafusos de trava.
As roscas dos eletro-dutos devem ser vedadas conforme método de vedação requerido pela área.
Certificações para atmosferas de gazes à prova de explosão (Ex d), segurança intrínseca (Ex i) e de poeiras (Ex t) são padrões para o posicionador digital PD HART.
Consulte o site www.sense.com.br para obter todas as certificações disponíveis.

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
19 / 43
É recomendável o uso dos cabos tipo “par trançado” de no mínimo 22 AWG de bitola.
Evite a passagem da fiação de sinal por rotas onde tenha cabos de potência ou comutadores elétricos.
ATENÇÃO O posicionador é protegido contra polaridade reversa e pode ser submetido a ± 50 mA e tensão de ± 60 Vdc sem danos.
A conexão do posicionador digital PD HART deve ser feita conforme as Figuras 19, 20.
Se o cabo for blindado, recomenda-se o aterramento da blindagem em apenas uma das extremidades. A extremidade não aterrada deve ser
cuidadosamente isolada.
O programador pode ser conectado nos terminais do posicionador digital ou em qualquer ponto da linha, através dos terminais da interface do programador dotados de garras tipo “jacaré”.
Figura 19. Diagrama de ligação
Figura 20. Diagrama de ligação com transmissor de pressão
O posicionador digital tem uma impedância
equivalente em torno de 550 Ohms. Portanto, deve-se verificar se a fonte de corrente ou a saída analógica do DCS, PLC ou do controlador single loop que alimenta o posicionador é capaz de suportar uma queda de tensão de 11 Volts por posicionador
(550 x 0,02 = 11 Volts).
ATENÇÃO Ao utilizar dois posicionadores trabalhando em
split range e conectados na mesma saída analógica, suas impedâncias se somam, resultando 1.100 Ohms. (no caso de 2 posicionadores). Logo, a saída analógica deverá suportar uma queda de tensão de 22 Volts.
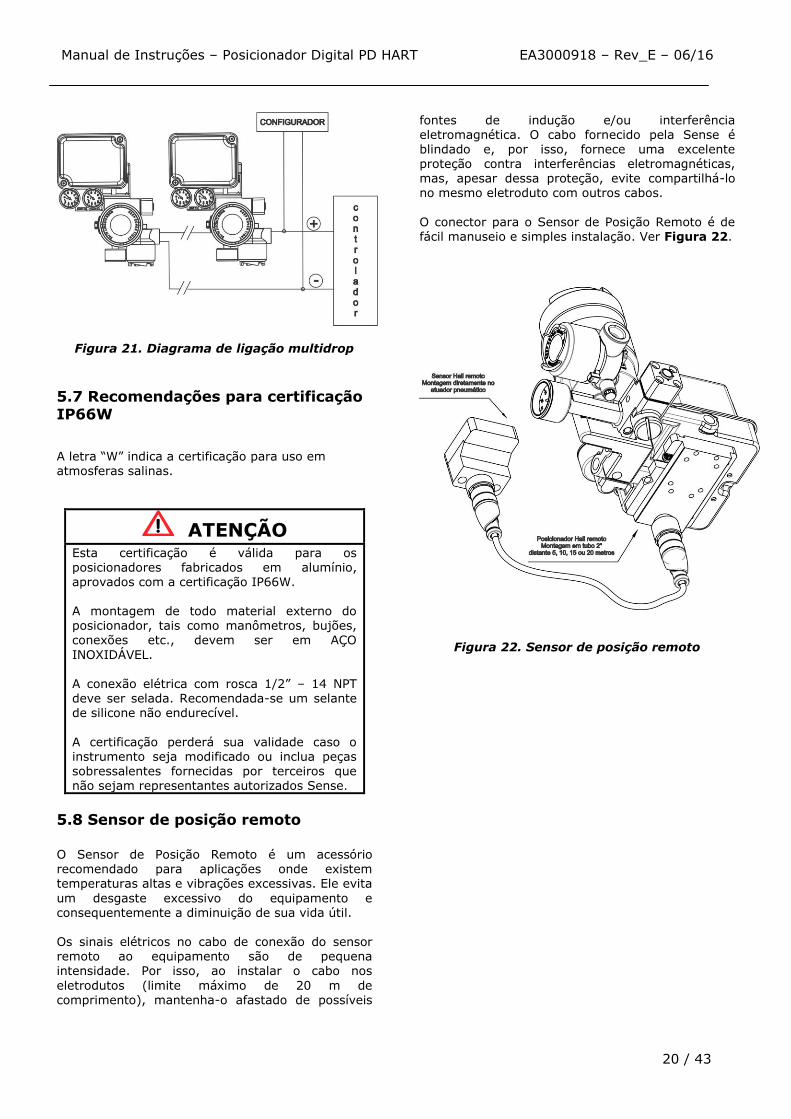
A interligação do posicionador numa rede multidrop deve ser feita conforme a Figura 21. Observe que
a ligação dos posicionadores deve ser em série.
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
20 / 43
Figura 21. Diagrama de ligação multidrop
5.7 Recomendações para certificação IP66W
A letra “W” indica a certificação para uso em atmosferas salinas.
ATENÇÃO
Esta certificação é válida para os posicionadores fabricados em alumínio, aprovados com a certificação IP66W.
A montagem de todo material externo do posicionador, tais como manômetros, bujões, conexões etc., devem ser em AÇO
INOXIDÁVEL. A conexão elétrica com rosca 1/2” – 14 NPT deve ser selada. Recomendada-se um selante de silicone não endurecível.
A certificação perderá sua validade caso o instrumento seja modificado ou inclua peças sobressalentes fornecidas por terceiros que não sejam representantes autorizados Sense.
5.8 Sensor de posição remoto
O Sensor de Posição Remoto é um acessório recomendado para aplicações onde existem temperaturas altas e vibrações excessivas. Ele evita
um desgaste excessivo do equipamento e consequentemente a diminuição de sua vida útil. Os sinais elétricos no cabo de conexão do sensor remoto ao equipamento são de pequena intensidade. Por isso, ao instalar o cabo nos
eletrodutos (limite máximo de 20 m de comprimento), mantenha-o afastado de possíveis
fontes de indução e/ou interferência eletromagnética. O cabo fornecido pela Sense é blindado e, por isso, fornece uma excelente proteção contra interferências eletromagnéticas, mas, apesar dessa proteção, evite compartilhá-lo no mesmo eletroduto com outros cabos.
O conector para o Sensor de Posição Remoto é de fácil manuseio e simples instalação. Ver Figura 22.
Figura 22. Sensor de posição remoto
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
21 / 43
5.9 Instalações em áreas classificadas
ATENÇÃO
Explosões podem resultar em morte ou ferimentos sérios, além de dano financeiro. A
Instalação deste posicionador em áreas explosivas deve ser realizada de acordo com os padrões locais e o tipo de proteção adotado. Antes de continuar a instalação tenha certeza de que os parâmetros certificados estão de acordo com a área classificada onde o equipamento será instalado.
A modificação do instrumento ou substituição de peças sobressalentes por outros que não sejam de representantes autorizados da Sense é proibida e anula a certificação do produto.
Os posicionadores são marcados com opções do tipo de proteção. A certificação somente será válida quando o tipo de proteção indicado pelo usuário estiver de acordo com o tipo de proteção selecionado para o posicionador. Quando um tipo determinado de proteção for selecionado, qualquer outro tipo de proteção
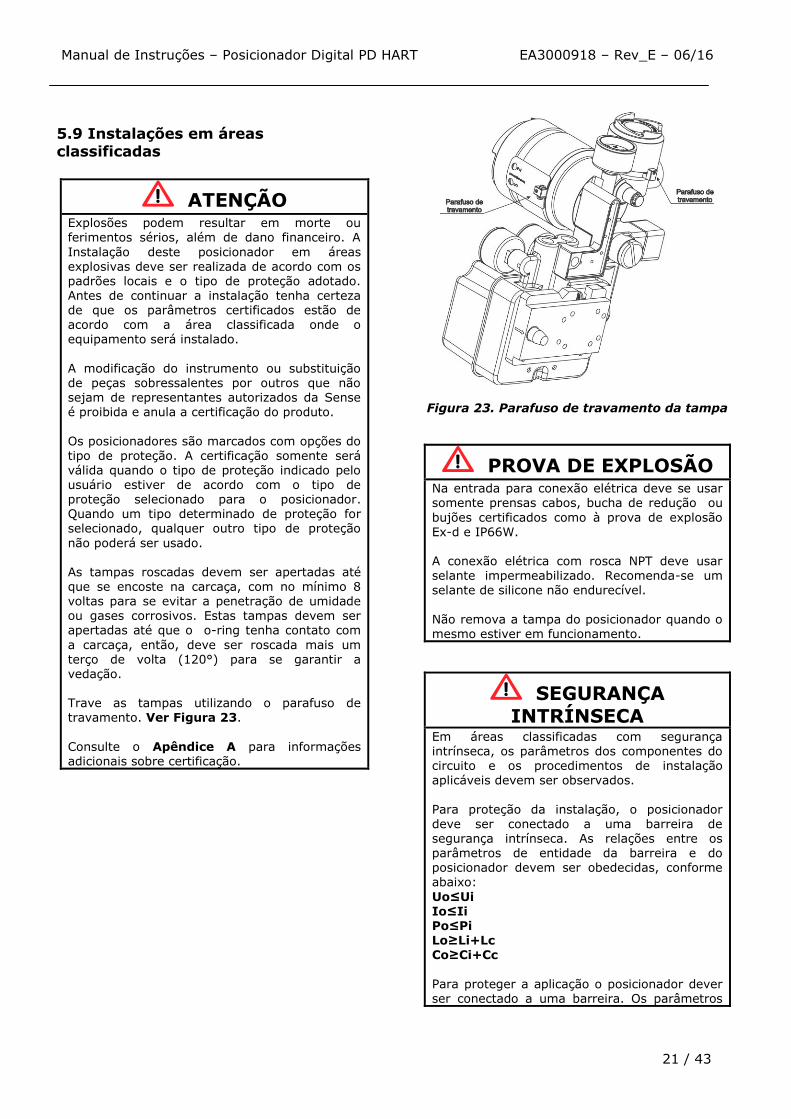
não poderá ser usado. As tampas roscadas devem ser apertadas até
que se encoste na carcaça, com no mínimo 8 voltas para se evitar a penetração de umidade ou gases corrosivos. Estas tampas devem ser apertadas até que o o-ring tenha contato com
a carcaça, então, deve ser roscada mais um terço de volta (120°) para se garantir a vedação. Trave as tampas utilizando o parafuso de travamento. Ver Figura 23.
Consulte o Apêndice A para informações adicionais sobre certificação.
Figura 23. Parafuso de travamento da tampa
PROVA DE EXPLOSÃO
Na entrada para conexão elétrica deve se usar somente prensas cabos, bucha de redução ou
bujões certificados como à prova de explosão Ex-d e IP66W. A conexão elétrica com rosca NPT deve usar selante impermeabilizado. Recomenda-se um
selante de silicone não endurecível.
Não remova a tampa do posicionador quando o mesmo estiver em funcionamento.
SEGURANÇA INTRÍNSECA
Em áreas classificadas com segurança intrínseca, os parâmetros dos componentes do circuito e os procedimentos de instalação aplicáveis devem ser observados.
Para proteção da instalação, o posicionador
deve ser conectado a uma barreira de segurança intrínseca. As relações entre os parâmetros de entidade da barreira e do posicionador devem ser obedecidas, conforme abaixo:
Uo≤Ui Io≤Ii Po≤Pi Lo≥Li+Lc Co≥Ci+Cc
Para proteger a aplicação o posicionador dever ser conectado a uma barreira. Os parâmetros

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
22 / 43
entre a barreira e o equipamento devem coincidir (Considere os parâmetros do cabo).
Parâmetros associados ao barramento de terra devem ser separados de painéis e divisórias de montagem. A blindagem é opcional. Se for usada, isole o terminal não aterrado. A capacitância e a indutância do cabo mais Ci e Li devem ser menores do que o Co e o Lo do
instrumento associado. Veja Apêndice “A” para valores Ci e Li. Para acesso livre barramento Hart em ambiente explosivo, assegure que os instrumentos do circuito estão instalados de acordo com as regras de ligação intrinsecamente segura. Use
apenas comunicador Hart Ex aprovado de acordo com o tipo de proteção Ex-i (IS). Não é recomendado remover a tampa do posicionador quando o mesmo estiver em funcionamento
6. Configuração
O posicionador digital PD HART é um instrumento que oferece as mais avançadas características que um aparelho de medição pode oferecer. A disponibilidade de um protocolo de comunicação digital (Hart®) permite conectar o instrumento a
um computador externo e ser configurado de forma
bastante simples e completa. Estes computadores que se conectam aos posicionadores são chamados de host e eles podem ser um mestre primário ou secundário. Assim, embora o protocolo Hart® seja do tipo mestre-escravo, na realidade, ele pode
conviver com até dois mestres em um barramento. Geralmente, o host primário é usado no papel de supervisório e o host secundário, no papel de configurador.
Quanto aos posicionadores, eles podem estar conectados em uma rede do tipo ponto a ponto ou
multidrop. Em rede ponto a ponto, o equipamento deverá estar com o seu endereço em “0”. Em rede multidrop, se o mecanismo de reconhecimento dos dispositivos for via endereço, os posicionadores
deverão estar configurados com endereço de rede variando de “1” a “15”. Se o mecanismo de reconhecimento for via Tag, os posicionadores
poderão estar com os seus endereços em “0” e continuar controlando a válvula, mesmo em configuração multidrop.
ATENÇÃO
Quando configurado em multiponto para áreas classificadas, os parâmetros de entidade
permitidos para a área devem ser rigorosamente observados. Assim, verificar:
Ca Cij + Cc La Lij + Lc
Voc min [Vmaxj] Isc min [Imaxj]
onde:
Ca, La = capacitância e indutância permitidas no barramento;
Cij, Lij = capacitância e indutância do
posicionador j (j=1, 15), sem proteção interna;
Cc, Lc = capacitância e indutância do cabo;
Voc = tensão de circuito aberto da barreira de segurança intrínseca;
Isc = corrente de curto circuito da barreira de
segurança intrínseca; Vmaxj = tensão máxima permitida para ser
aplicada no posicionador j; Imaxj = corrente máxima permitida para ser aplicada no posicionador j.
O posicionador digital apresenta um conjunto
bastante abrangente de comandos Hart® que permite acessar qualquer funcionalidade nele implementado. Estes comandos obedecem as
especificações do protocolo Hart® e eles estão agrupados em Comandos Universais, Comandos de Práticas Comum e Comandos Específicos. O posicionador digital pode ser configurado através
de um programador portátil - Handheld.
A Figura 24 mostra um exemplo do frontal de um programador portátil.
Figura 24. Exemplo de frontal de Handheld

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
23 / 43
O TSO - “Tight Shut Off “ assegura que a válvula está totalmente fechada, evitando vazamento na base da válvula. Se o valor de TSO é 5%, a válvula só começará a movimentar-se a partir da posição fechada (por exemplo) em 5% do sinal do
controlador. Para o TSO D - “Tight Shut Off Deadband”, quando o seu valor é de 1%, a válvula só começará a movimentar-se a partir da posição fechada em 6%. Em 4% a válvula estará totalmente fechada.
6.1 Recursos de configuração
Através dos configuradores Hart®, o firmware do
posicionador digital permite que os seguintes recursos de configuração possam ser acessados:
Identificação e dados de especificação do
Posicionador;
Movimento Remoto;
Função especial de caracterização de acordo com uma curva configurável de 16 pontos;
Caracterização da Vazão (Linear, Igual
Porcentagem e Abertura Rápida);
Monitoração de todas as variáveis do
equipamento: entrada, setpoint, desvio e temperatura de saída modulada;
Diagnóstico (Manutenção preventiva);
Diagnóstico do posicionador e determinação de falha;
Configuração do Controlador PID;
Configuração do Equipamento;
Manutenção do Equipamento.
As operações que ocorrem entre o configurador e o posicionador não interrompem a medição da posição e não alteram o sinal de saída. O configurador pode ser conectado no mesmo cabo do sinal de 4-20 mA até 2.000 metros de distância do posicionador.
6.2 Identificação e dados de fabricação
As seguintes informações são disponibilizadas em termos de identificação e dados de fabricação do posicionador:
TAG - Campo com 8 caracteres alfanuméricos para identificação do posicionador. DESCRIPTION - Campo com 16 caracteres alfanuméricos para identificação adicional do posicionador. Pode ser usado para identificar a
localização ou o serviço. MESSAGE - Campo com 32 caracteres alfanuméricos para qualquer outra informação, tal como o nome da pessoa que fez a última calibração, algum cuidado especial para ser tomado
ou se, por exemplo, é necessário o uso de uma escada para ter acesso ao posicionador.
DATE - Usada para identificar uma data
relevante como a última calibração, a próxima calibração ou a instalação. A data é armazenada no formato mês, dia e ano, padrão americano (Exemplo: Oct 30, 2003), que é automaticamente assumido após a escolha destes itens.
UNIQUE ID - Usado para identificar o equipamento e a construção do endereço Hart® (longo).
DEVICE INFORMATION - Este botão permite ler os dados de identificação do equipamento gravados na fábrica.
NOTA
Estes itens de informação não podem ser
modificados. Eles são lidos da placa do circuito,
diretamente de sua memória.
6.3 Monitoração
Esta função permite monitoração remota das variáveis do posicionador pelos configuradores. O tempo para iniciar a leitura está em torno de 5 segundos. Os valores são continuamente atualizados. Ao todo podem ser monitorados 20 itens, os quais são: posição atual da válvula em porcentagem, entrada em porcentagem da faixa de
corrente ajustada (antes dos limites e da linearização da vazão), corrente de entrada em mA ou %, temperatura do equipamento em graus Celcius e graus Fahrenheit, etc.
6.4 Configuração do equipamento
Além dos serviços de configuração e operação do
equipamento, o posicionador digital permite Auto Setup (Calibração) e Auto Tuning (Sintonia). Os serviços de configuração do equipamento estão relacionados a:
PROTEÇÃO DA ESCRITA – Escrita Proteg: O
configurador somente mostrará que a escrita está habilitada se o jumper W2 da placa principal estiver conectado nos pinos sobre a palavra DOWN. (ver figura 4.2).
FUNÇÃO DE CARACTERIZAÇÃO – As
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
24 / 43
características de fluxo das válvulas podem ser mudadas esta função. Por exemplo, se em uma válvula com características de fluxo linear inerente é aplicada a caracterização de fluxo de igual porcentagem, a válvula atuará como uma válvula de igual porcentagem. Pode-se
encontrar qual a característica inerente de cada válvula na documentação do fabricante. As opções para caracterização de fluxo aplicada são:
INDICAÇÃO NO DISPLAY - O display digital do posicionador contém três campos bem definidos: campo de informações com ícones informando os estados ativos de sua
configuração, campo numérico de 4 ½ dígitos
para indicação de valores e campo alfanumérico de 5 dígitos para informações de estado e unidades. Os parâmetros que podem ser selecionados para visualização são mostrados na tabela a seguir:
O posicionador aceita até duas configurações de display, que são mostradas alternadamente com um intervalo de 2 segundos entre as mesmas. Os parâmetros que podem ser selecionados para visualização são mostrados na tabela abaixo:
PARÂMETROS DESCRIÇÃO
PV % Variável de processo em
porcentagem.
SP % Setpoint em porcentagem
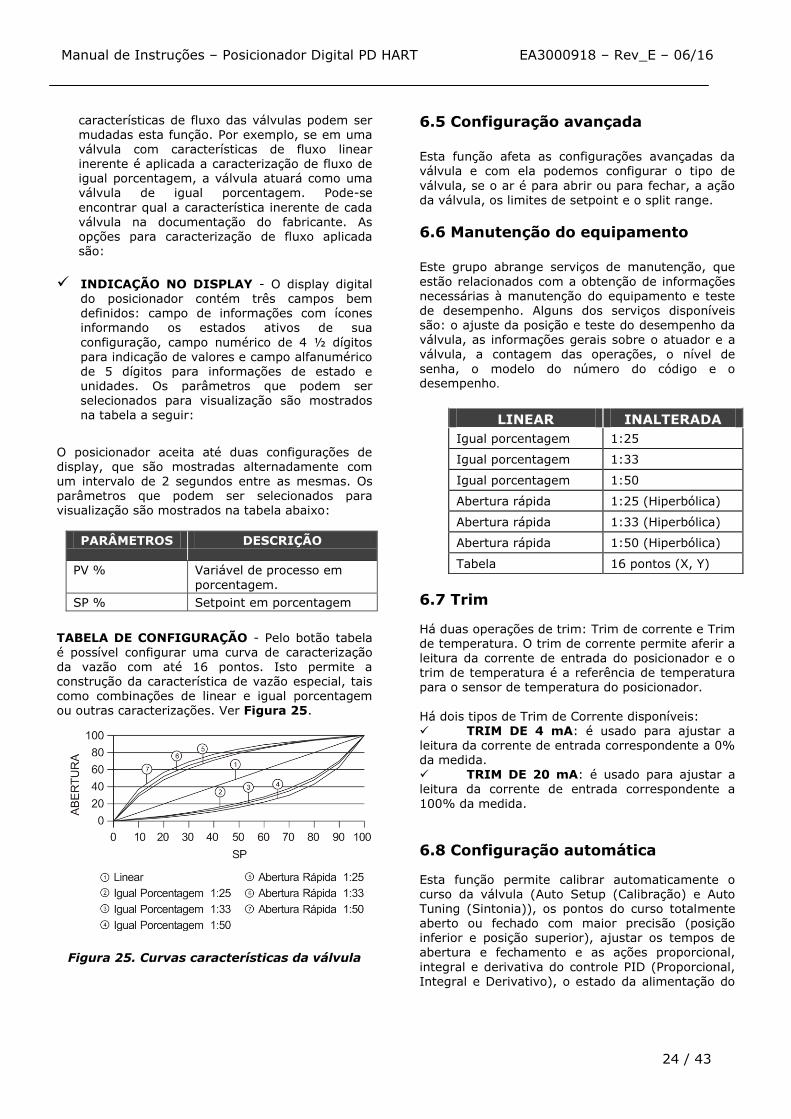
TABELA DE CONFIGURAÇÃO - Pelo botão tabela é possível configurar uma curva de caracterização da vazão com até 16 pontos. Isto permite a construção da característica de vazão especial, tais como combinações de linear e igual porcentagem ou outras caracterizações. Ver Figura 25.
Figura 25. Curvas características da válvula
6.5 Configuração avançada
Esta função afeta as configurações avançadas da válvula e com ela podemos configurar o tipo de
válvula, se o ar é para abrir ou para fechar, a ação da válvula, os limites de setpoint e o split range.
6.6 Manutenção do equipamento
Este grupo abrange serviços de manutenção, que
estão relacionados com a obtenção de informações necessárias à manutenção do equipamento e teste de desempenho. Alguns dos serviços disponíveis são: o ajuste da posição e teste do desempenho da válvula, as informações gerais sobre o atuador e a
válvula, a contagem das operações, o nível de
senha, o modelo do número do código e o desempenho.
6.7 Trim
Há duas operações de trim: Trim de corrente e Trim de temperatura. O trim de corrente permite aferir a leitura da corrente de entrada do posicionador e o trim de temperatura é a referência de temperatura para o sensor de temperatura do posicionador.
Há dois tipos de Trim de Corrente disponíveis: TRIM DE 4 mA: é usado para ajustar a leitura da corrente de entrada correspondente a 0% da medida. TRIM DE 20 mA: é usado para ajustar a leitura da corrente de entrada correspondente a
100% da medida.
6.8 Configuração automática
Esta função permite calibrar automaticamente o curso da válvula (Auto Setup (Calibração) e Auto Tuning (Sintonia)), os pontos do curso totalmente aberto ou fechado com maior precisão (posição inferior e posição superior), ajustar os tempos de abertura e fechamento e as ações proporcional,
integral e derivativa do controle PID (Proporcional, Integral e Derivativo), o estado da alimentação do
LINEAR INALTERADA
Igual porcentagem 1:25
Igual porcentagem 1:33
Igual porcentagem 1:50
Abertura rápida 1:25 (Hiperbólica)
Abertura rápida 1:33 (Hiperbólica)
Abertura rápida 1:50 (Hiperbólica)
Tabela 16 pontos (X, Y)

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
25 / 43
ar, as condições do imã, do sensor de Posição, do setup e a corrente da bobina. Estágios do Setup para o posicionador digital (Full Setup, Auto Setup, Auto Tuning). HALL
Manda a válvula para fim de curso, aberta ou fechada, dependendo da montagem. - Full setup 10% - Auto setup 20% - Auto tuning N/A GAIN
Verifica se a válvula se movimenta até a outra extremidade e encontra o ganho para o A/D. - Full setup 15% - Auto setup 40% - Auto tuning N/A SPAN
Calibra o curso da válvula, com os valores das extremidades para o sensor hall. - Full setup 20% - Auto setup 60% - Auto tuning N/A TIME
Encontra tempos, abertura e fechamento atuador. - Full setup 40% - Auto setup 100% - Auto tuning N/A CNTRL
Inicia o Auto tuning (sintonia) na posição 50%. - Full setup 45% - Auto setup N/A - Auto tuning 0% TUNE1
Oscila o sistema para cálculo dos parâmetros PID. - Full setup 55% - Auto setup N/A - Auto tuning 30% TUNE2
Aquisição dos valores da oscilação. - Full setup 60% - Auto setup N/A - Auto tuning 35% WAIT
Início do cálculo dos parâmetros PID. - Full setup 65% - Auto setup N/A - Auto tuning 40% WAIT
Início da ação da integral na posição 50% - Full setup 85% - Auto setup N/A
- Auto tuning 40% SAVE
Grava os parâmetros calculados e volta ao controle
ao final do setup (calibração). - Full setup 100% - Auto setup N/A - Auto tuning 98%
6.9 Multidrop configuration
ENDEREÇAMENTO – O posicionador digital contém
uma variável que define o endereço do equipamento em uma rede Hart®. Os endereços do Hart vão do valor "0" a "15", sendo que de "1" a "15" são endereços específicos para conexão
multiponto. Quando o posicionador digital está configurado em multiponto significa que ele possui o endereço de "1" a "15" e com o display indicando
“MD”. O posicionador digital sai de fábrica configurado com endereço "0".
6.10 Diagnóstico
Esta função permite configurar os parâmetros para fins de diagnóstico e mostra as condições gerais do posicionador. Os parâmetros são: Zona Morta (0 a 100%)
Curso do Odômetro (mm ou rad) Máximo valor do Odômetro (mm/rad)
Unidades de Engenharia (mm/rad ou %) Reversos da Zona Morta (%) Limite de Reversos (uni)
6.11 Backup
A transferência dos dados do transdutor para a placa principal deve ser feita imediatamete após a montagem quando houver a substituição da placa
analógica ou da placa principal.
Isto é feito automaticamente quando o posicionador é energizado. Se necessário, o usuário pode forçar a transferência usando a opção Ler do transdutor.
A opção Escrever no transdutor pode ser utilizada
para gravar as alterações feitas, por exemplo, em Kp, Tr e etc., na memória do transdutor. Os valores anteriores de Kp, Tr e etc. serão perdidos.
6.12 Fábrica
Esta opção é utilizada somente na fábrica e não permite acesso do usuário.

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
26 / 43
7. PROGRAMAÇÃO LOCAL
7.1 Ajuste local
O posicionador tem uma chapa com dois orifícios marcados com as letras “S” e “Z”. A placa de circuito, denominada principal, possui duas chaves magnéticas próximas desses orifícios. Para acioná-
las aproxime a chave magnética do orifício desejado e siga as indicações do display para efetuar a configuração. Ver Figura 26.
Figura 26. Ajuste local
Os orifícios são marcados com Z (Zero) e S (Span)
serão designados apenas por (Z) e (S), respectivamente. A tabela mostra a ação realizada pela chave magnética quando inserida em (Z) e (S) de acordo com o tipo de seleção do ajuste.
ORIFÍCIO AÇÃO
Z Move entre as funções.
S Seleciona a função do indicador.
O display digital é necessário para visualização da programação via ajuste local.
7.2 Chave magnética
Com a chave magnética, é possível configurar o posicionador digital localmente, eliminando a necessidade de configuradores adicionais em muitas aplicações básicas.
7.3 Conexão dos jumpers W1 e W2
A Figura 27 mostra a placa principal.
Proteção de Escrita
- Jumper W1 conectado em OFF Se o jumper W1 estiver conectado em OFF, desabilitada a proteção contra escrita.
- Jumper W1 conectado em ON Se o jumper W1 estiver conectado em ON,
habilitada a proteção contra escrita. Ajuste Local - Jumper W2 conectado em OFF Se o jumper W2 estiver conectado em OFF, desabilitado ajuste local, não é permitido atuar ou
alterar parâmetros da árvore de programação.
- Jumper W2 conectado em ON Se o jumper W2 estiver conectado em ON,
habilitado ajuste local, é permitido atuar ou alterar parâmetros da árvore de programação. Ver figura 25.
Figura 27. Placa principal
Para configurar o ajuste local posicione os jumpers da placa principal como indicado na Figura 28.
Figura 28. Opções de ajuste local
Para configurar a proteção de escrita deslize os jumpers da placa principal como indicado na Figura 29.
Figura 29. Proteção de escrita

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
27 / 43
7.4 Árvore de programação local
A árvore de programação é estruturada com menus das principais funções do software. Ver Figura 30.
Figura 30. Árvore de programação local
No estado de ajuste local, pode-se mover por
todas as opções de configuração mantendo a chave magnética no orifício “Z”. Para atuação, após escolher a opção pelo modo anterior, coloque a chave no orifício “S”.
A permanência da chave magnética no orifício “S”
permite atuar no parâmetro escolhido de forma contínua, quando este for um valor numérico. A ação por incremento é feita colocando-se e retirando-se a chave magnética sucessivamente até obter o valor desejado.
ATENÇÃO
Toda atuação nos parâmetros deve ser feita
criteriosamente, pois a atuação grava os
parâmetros de configuração e não solicita a
confirmação ao usuário. Uma vez atuado, é
assumida a configuração.
7.5 Parâmetros ajustáveis
FULL SETUP Executa o AUTO SETUP e o AUTOTUNING, para encontrar o ajuste completo da válvula, inclusive os parâmetros PID.
AUTO SETUP Durante este ajuste, o posicionador verificará as posições de 0% e 100% de abertura da válvula,
em relação ao imã e calculará o ganho do conversor AD para leituras da posição.
AUTOTuning Permite realizar a sintonia do controle PID, através da seleção automática dos valores de Kp, Tr e Td. MANUAL SETUP
Executa os passos do AUTO SETUP, porém necessita da confirmação do usuário entre os passos.

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
28 / 43
O usuário apenas deverá confirmar a finalização do passo atual quando a válvula não estiver mais em movimento. Os passos estão descritos a seguir:
Passo 1: Fechamento da válvula para verificação da posição 0%. Passo 2: Abertura da válvula para verificação da posição 100%. Passo 3: Fechamento da válvula para início do cálculo do ganho do conversor AD.
Passo 4: Abertura da válvula para finalização do cálculo do ganho do conversor AD.
ATENÇÃO
O MANUAL SETUP é recomendado em casos
onde não é possível que se realize o AUTO
SETUP devido a ambientes muito instáveis.
CUIDADO
Não toque nas partes móveis da
válvula/posicionador/atuador, pois elas
inesperadamente podem mover-se
automaticamente.
TYPE - Tipo de Válvula Através deste parâmetro, o usuário configura o
tipo de válvula e o tipo de ação associada a ela. Têm-se as seguintes opções:
- Sind: Simples ação e Direta; - Sinr: Simples ação e Reversa; - Doud: Dupla ação e Direta; - Dour: Dupla ação e Reversa.
CHAR – Curva de Caracterização Através deste parâmetro, o usuário configura o tipo de curva de caracterização da válvula. Têm-se as seguintes opções:
- Linear: linear - EP25; EP33; EP50: igual porcentagem
- QO25; QO33; QO50: hiperbólica (abertura rápida)
- Tab: Tabela de 16 pontos (configuráveis)
MODE - Modo de Operação Permite escolher o modo em operação. Ao ligar o posicionador, ele estará sempre no modo
automático. Têm-se as seguintes opções: - Auto - Modo Automático
No modo automático, a posição é ajustada de acordo com o sinal de corrente de 4 a 20 mA na entrada. Neste modo não é permitida a
atuação local no parâmetro SP%.
Man - Modo Manual No modo manual, a posição é ajustada de acordo com o valor do parâmetro SP%, independente da corrente de entrada. Somente neste modo é permitida a atuação no parâmetro SP%.
SP % - Set Point Este parâmetro representa o valor desejado da posição. No modo “Manual”, é permitido que se atue neste parâmetro remotamente, independente da corrente de entrada. No modo automático é calculado o valor desejado a partir do nível de
entrada de corrente.
LOPOS - Ajuste da Posição Inferior Este parâmetro possibilita ao usuário calibrar a
posição inferior desejada, associada à corrente de alimentação do posicionador no momento do ajuste. Desta forma, além da calibração da
posição, também é feito o ajuste do Split Range inferior.
UPPOS - Ajuste da Posição Superior Este parâmetro possibilita ao usuário calibrar a posição superior desejada, associada à corrente de alimentação do posicionador no momento do
ajuste. Desta forma, além da calibração da posição, também é feito o ajuste do Split Range superior. TIME - Tempo de Variação do Setpoint Permite configurar a taxa de variação do setpoint,
selecionando o tempo desejado para
abertura/fechamento da válvula. A unidade é dada em segundos.
Kp - Ganho Proporcional Permite ajustar o ganho proporcional do controle PID digital.
Tr - Tempo Integral Permite ajustar o tempo integral do controle PID digital.
Td - Tempo Derivativo Permite ajustar o tempo derivativo do controle
PID digital. DISP – POS, SP or CRTL
Durante a operação normal, o display mostra a posição em porcentagem (POS %). Este parâmetro permite selecionar set point
porcentagem (SP %) ou a corrente de bobina em porcentagem (CRTL %).
Airto - Ar para Abrir ou Ar para Fechar Esta opção permite configurar o posicionador de acordo com a atuação da válvula. Se o atuador trabalha com “ar para abrir” ou “ar para fechar”, o
posicionador deve ser configurado para AirTo OPEN ou AirTo CLOSE, respectivamente.

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
29 / 43
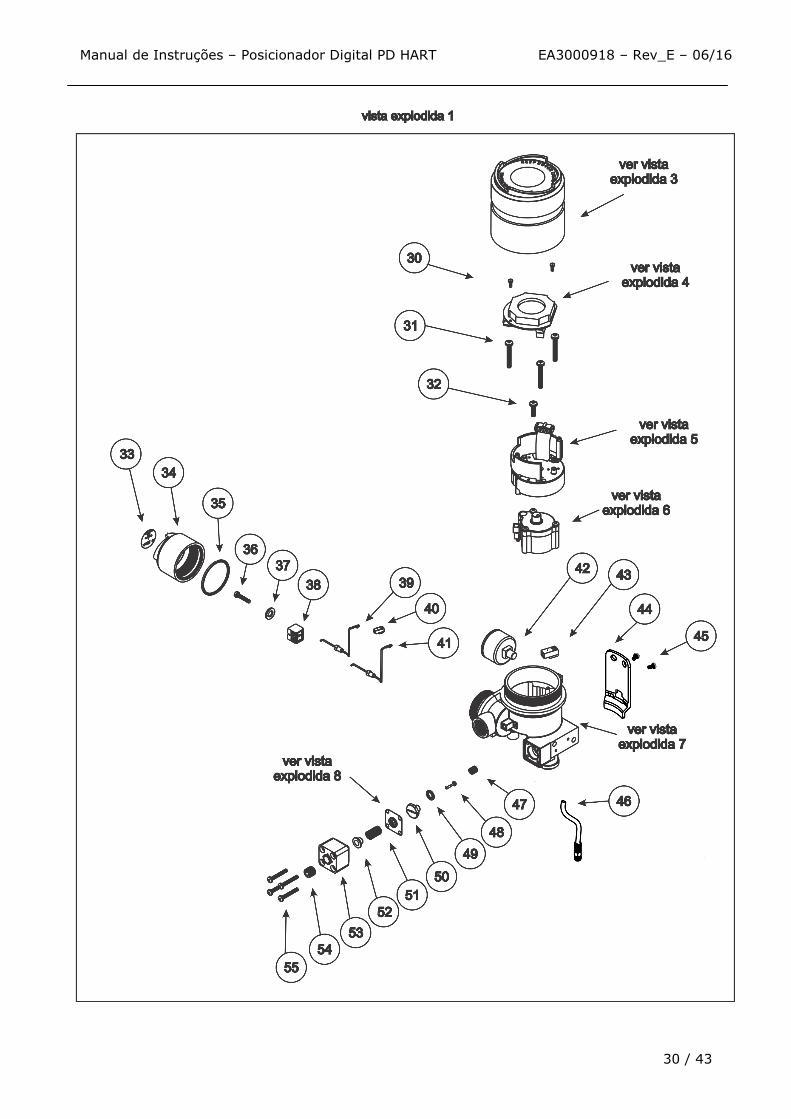
8. Lista de peças
Figura 31. Lista de peças posicionador
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
30 / 43

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
31 / 43

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
32 / 43

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
33 / 43
Item Qtd Descrição 1
1
Etiqueta posicionador
2 2 Parafuso M5 3 1 Tampa posicionador 4 2 Parafuso M5 5 1 O-ring 6 1 Mola realimentação 7 1 Ajuste da mola realimentação 8 1 Suporte do ajuste
9 1 Porca M8 10 2 Parafuso M5 11 2 Parafuso M5 12 1 Válvula carretel 13 14
3 3
O-ring Parafuso M6
15 2 Manômetro escala 0-160 psi 16 1 Junta de vedação 17 3 Screen-cup 18 1 Base do posicionador 19 2 O-ring 20 1 Respiro 21 1 Sealing plug
22 23 24 25 26 27
1 1 1 1 1 1
Placa do sensor Hall Tampa do sensor Hall Base do sensor Hall Tubo do sensor Hall Cabo do sensor Hall Carenagem cabo do Hall
28 1 Parafuso M5
29 30 31
2 2 3
Parafuso ¼” - 20 Parafuso M3 Parafuso M4
32 33 34
1 1 1
Parafuso M4 Etiqueta tampa da borneira Tampa da borneira
35 36 37 38 39 40 41
42 43 44 45 46 47
48
49 50 51 52 53 54
55 56 57 58
1 1 1 1 1 1 1
1 1 1 2 1 1
1
1 1 1 1 1 1
4 2 1 4
O-ring Parafuso M3 Arruela de pressão M3 Borneira Cabo vermelho do filtro Conector Cabo preto do filtro
Manômetro escala 0 – 30 psi Conector Chapa de ajuste Z/S Parafuso M3 Cabo do sensor Hall Mola do pino
Pino do diafragma
O-ring Porca do diafragma Mola do diafragma Guia da mola Tampa do diafragma Parafuso do diafragma
Parafuso M4 Parafuso M3 Mola plana Parafuso M4
59 60 61 62
63 64 65 66 67 68 69
70 71 72 73 74
75
76 77 78 79 80 81 82
83 84 85 86 87 88 89
90 91
92 93 94 95
96 97 98 99 100 101 102
103 104 105 106 107
108 109
1 1 1 1
1 1 1 4 1 1 3
1 1 1 3 3
1
1 1 1 2 1 2 2
2 2 1 2 1 2 1
1 1
1 1 1 1
1 1 1 1 1 1 1
1 1 1 1 1
1 1
Tampa da torre do diafragma Torre do diafragma Tampa com visor O-ring
Visor Mola prato Anel elástico Parafuso M2.5 Display LCD Placa principal Parafuso M3
Espaçador placa principal Tampa da carcaça da placa Placa analógica Parafuso M2 Parafuso M4
Parafuso de ajuste do atuador
Carcaça da placa Palheta O-ring Parafuso M4 Flange da bobina Parafuso do terra Arruela de pressão M4
Trava do terra Bucha roscada do terra O-ring Sinterizado O-ring Parafuso M4 Carcaça do conversor Hart
O-ring O-ring
Restrição Elemento filtrante Silenciador Filtro conversor Ex
O-ring Tampa do filtro Porca Arruela superior diafragma Diafragma conversor Arruela inferior diafragma Arruela superior posicionador
Diafragma posicionador Arruela inferior posicionador Parafuso M4 Flange do carretel Bobina
Bico do carretel Carcaça do carretel

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
34 / 43
9. Solução de problemas
Os posicionadores digitais são intensamente testados e inspecionados antes de serem enviados para o usuário, com o objetivo de assegurar sua qualidade. Todavia, também foram projetados considerando-se a possibilidade de reparos pelo usuário, caso seja necessário.
Em geral, é recomendado que o usuário não faça reparos nas placas de circuito impresso. O recomendado é manter em estoque conjuntos sobressalentes ou adquirir da Sense quando necessário.
A manutenção é um conjunto de técnicas destinadas a manter os posicionadores com maior tempo de utilização (vida útil), operar em condições seguras e promover a redução de custos. Os diferentes tipos de manutenção seguem descritos ao longo dessa seção.
9.1 Recomendações para Montagem de Equipamentos Aprovados com a Certificação IP66 W
Esta certificação é válida para os posicionadores fabricados em alumínio, aprovados com a certificação IP66W. A montagem de todo material externo do posicionador, tais como manômetros, bujões, conexões etc., devem ser em AÇO INOXIDÁVEL. A conexão elétrica com rosca 1/2” - 14NPT deve ser selada. Recomendada-se um selante de silicone não endurecível. A certificação perderá sua validade caso o instrumento seja modificado ou inclua peças sobressalentes fornecidas por terceiros que não sejam representantes autorizados Sense.
9.2 Diagnóstico não utilizando o configurador
SINTOMA POSSÍVEL CAUSA AÇÃO
Instrumento não
mostra posição no
display
Conexões elétricas Verifique a polaridade da fiação e a continuidade
Fonte de alimentação Verifique a corrente de entrada do sinal. A corrente mínima para o posicionador operar é de 3,8 mA.
Falha no circuito eletrônico Verifique as placas em busca de defeitos substituindo-as
por placas sobressalentes.
Instrumento não
responde para o sinal
de entrada
Conexões da Saída de Pressão Verifique se há vazamento de ar.
Pressão de alimentação Verifique a pressão da alimentação. A pressão de entrada do posicionador deve estar entre 40 e 150 psi.
Calibração Verifique os pontos de calibração do posicionador.
Restrição obstruída Use os procedimentos descritos neste Manual para
limpeza da restrição
Atuador oscila Calibração Ajuste o parâmetro servo Kp e ajuste o parâmetro servo Tr.
Atuador responde
lentamente Parâmetros de ajuste muito baixo Ajuste o parâmetro “Servo_Kp ou Amortecimento
Atuador responde
muito rápido Parâmetros de ajuste muito alto Ajuste o parâmetro “Servo_Kp ou Amortecimento

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
35 / 43
9.3 Diagnóstico utilizando o configurador
Se o posicionador estiver alimentado e com o circuito de comunicação e a unidade de processamento funcionando, o configurador pode ser usado para diagnóstico, caso exista algum problema com o posicionador. O configurador deve ser conectado ao posicionador conforme esquema de ligação apresentado na Seção 5.6 - Figuras 19, 20 e 21. Mensagens de erro
As mensagens de erro têm o objetivo de informar qual o diagnóstico alcançado através da autoverificação (autodiagnóstico) de erros ou disfunções. Quando o configurador estiver comunicando com o posicionador, o usuário será informado sobre qualquer problema encontrado, através do auto diagnóstico. No posicionador digital, as mensagens de erro são sempre alternadas com a informação mostrada na primeira linha do display do configurador. A Tabela abaixo lista as mensagens de erro e oferece maiores detalhes sobre ações
de manutenção corretiva.
MENSAGENS DE ERRO POSSÍVEL CAUSA
ERRO DE PARIDADE - A resistência da linha não é maior ou igual 250.
- Ruído excessivo ou Ripple na linha.
- Sinal de nível baixo.
- Interface danificada.
Fonte de alimentação ou tensão da bateria do programador menor que 9V.
ERROR OVERRUN
ERROR CHECK SUM
ERROR FRAMING
NO RESPONSE
- Resistência da linha do posicionador não está de acordo com a reta de carga.
- Posicionador sem alimentação. - Interface não conectada ou danificada. - Posicionador configurado no modo Multidrop sendo acessado pela função
ON_LINE_ÚNICO_ INSTR. - Posicionador reversamente polarizado. - Interface danificada. Fonte de Alimentação ou tensão da bateria do programador menor que 9V.
LINHA OCUPADA - A linha está sendo usada por outro dispositivo.
CMD NÃO IMPLEMENTADO - Versão de software não compatível entre o programador e o posicionador.
INSTRUMENTO OCUPADO - Posicionador executando uma tarefa importante, por exemplo, ajuste local.
FALHA NO POSICIONADOR - Transdutor desconectado.
- Transdutor com defeito.
PARTIDA A FRIO! - Falha na Alimentação ou START-UP.
SAÍDA FIXA ! - Operando em modo local com posição fixa!
- Conectado a entrada em burnout.
OUTPUT SATURATED ! - Posição fora do Span calibrado ou 3,90 ou 21,00 mA.
2ª VAR FORA DA FAIXA - Temperatura fora da faixa de operação.
- Sensor de temperatura danificado.
1ª VAR FORA DA FAIXA - Posição fora da faixa de operação da válvula. - Sensor danificado ou módulo sensor não conectado. - Posicionador com erros de configuração na calibração..
VALOR INFERIOR MUITO ALTO - Valor do ponto inferior > (Limite superior da faixa Span Mínimo).
VALOR INFERIOR MUITO BAIXO - Valor do ponto inferior < ( Limite superior da faixa).
VALOR SUPERIOR MUITO ALTO - Valor do ponto superior > 110% x (Limite superior da faixa).
VALOR SUPERIOR MUITO BAIXO - Valor do ponto superior < -10% (Limite inferior da faixa).
VALOR SUPERIOR & INFERIOR FORA DA FAIXA
- Pontos inferior e superior estão com valores fora dos limites da faixa do posicionador.
SPAN MUITO BAIXO - A diferença entre os pontos inferior e superior é um valor menor que o

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
36 / 43
permitido.
POSIÇÃO ATUAL - Posição atual da válvula foi acima do limite superior.
POSIÇÃO ATUAL - Posição atual da válvula foi acima do limite inferior.
VARIÁVEL ACIMA DO VALOR PERMITIDO
- Parâmetro acima do limite de operação.
VARIÁVEL ABAIXO DO VALOR PERMITIDO
- Parâmetro abaixo do limite de operação.
LOOP DEVE ESTAR EM MANUAL - Indica que a operação a ser efetuada pode afetar a saída.
LOOP PODE RETORNAR PARA AUTO - Recomenda-se, depois de efetuada a operação, retornar o controle em
Automático.
10. Manutenção
Esta seção descreve os principais componentes, montagem e desmontagem do posicionador. Modificações, substituições por partes não originais ou a utilização de procedimentos de manutenção não descritos neste manual, podem afetar a performance e causar riscos a pessoas e equipamentos.
CUIDADO
Utilize somente de procedimentos e peças originais referenciadas neste manual. Procedimentos não autorizados e peças não
originais podem afetar o desempenho do produto.
10.1 Restrição
A Figura 32 mostra o alojamento da restrição. Utilize os seguintes passos para certificar-se de que a restrição não esteja entupida:
1. Desconecte o ar de alimentação. 2. Remova a restrição do compartimento.
3. Verifique se os anéis de vedação estão em boas condições (podem estar amassados ou ressecados). Substitua-os se necessário.
4. Se o furo apresentar depósito de contaminantes, limpe a restrição inserindo um fio com um diâmetro máximo de 0.38 mm. Cuidado para não danificar ou aumentar o diâmetro do furo.
5. Lubrifique os anéis de vedação com óleo de silicone e verifique se estão corretamente
assentados no alojamento. Monte novamente e
verifique o funcionamento.
6. Se após a limpeza o posicionador digital ainda
não funcionar corretamente, substitua a restrição por uma nova.
Figura 32. Restrição
10.2 Filtro
A Figura 33 mostra o filtro coalescente, utilizado para prevenir degradação do desempenho do equipamento pneumático. A água e o óleo coletados na parte inferior do filtro devem ser periodicamente verificados. É recomendado que
se estabeleça um ciclo de manutenção para monitorar o grau de poluição do filtro coalescente. Utilize os seguintes passos para certificar-se de que o filtro não esteja sujo ou danificado.
1. Desconecte o ar de alimentação.
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
37 / 43
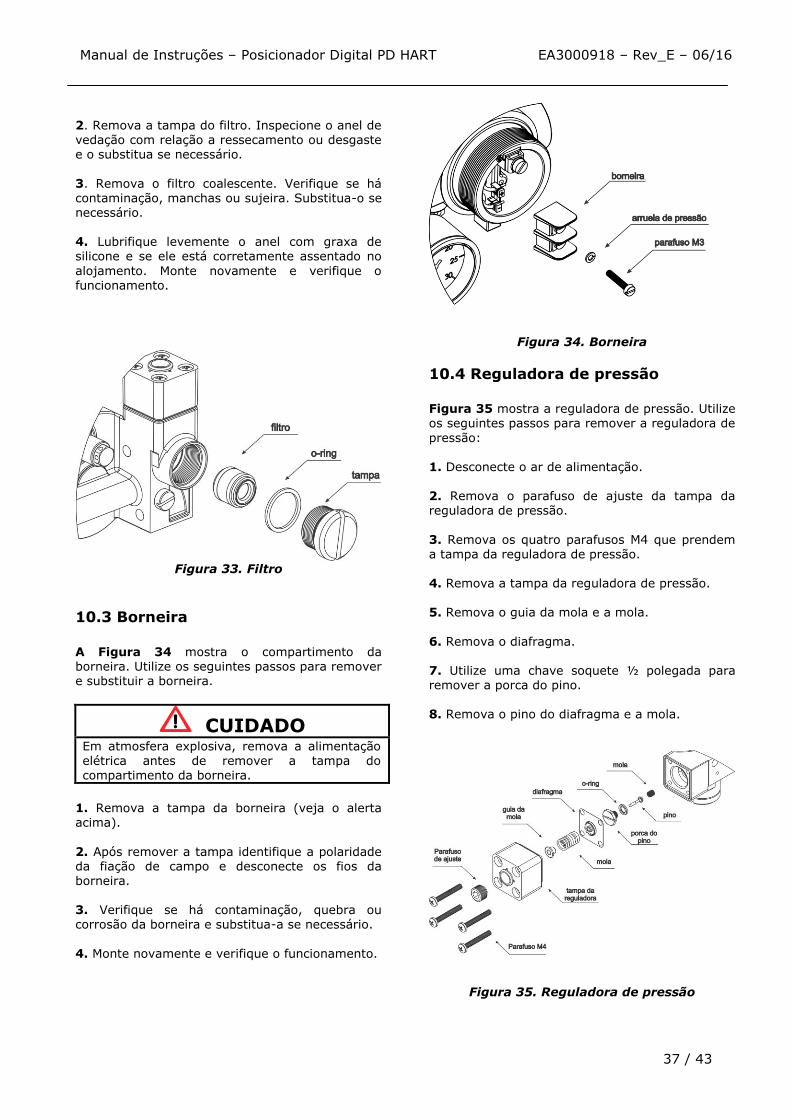
2. Remova a tampa do filtro. Inspecione o anel de vedação com relação a ressecamento ou desgaste e o substitua se necessário.
3. Remova o filtro coalescente. Verifique se há contaminação, manchas ou sujeira. Substitua-o se necessário. 4. Lubrifique levemente o anel com graxa de silicone e se ele está corretamente assentado no
alojamento. Monte novamente e verifique o funcionamento.
Figura 33. Filtro
10.3 Borneira
A Figura 34 mostra o compartimento da borneira. Utilize os seguintes passos para remover e substituir a borneira.
CUIDADO Em atmosfera explosiva, remova a alimentação elétrica antes de remover a tampa do compartimento da borneira.
1. Remova a tampa da borneira (veja o alerta acima).
2. Após remover a tampa identifique a polaridade da fiação de campo e desconecte os fios da borneira. 3. Verifique se há contaminação, quebra ou corrosão da borneira e substitua-a se necessário.
4. Monte novamente e verifique o funcionamento.
Figura 34. Borneira
10.4 Reguladora de pressão
Figura 35 mostra a reguladora de pressão. Utilize os seguintes passos para remover a reguladora de
pressão: 1. Desconecte o ar de alimentação. 2. Remova o parafuso de ajuste da tampa da reguladora de pressão.
3. Remova os quatro parafusos M4 que prendem a tampa da reguladora de pressão. 4. Remova a tampa da reguladora de pressão.
5. Remova o guia da mola e a mola.
6. Remova o diafragma. 7. Utilize uma chave soquete ½ polegada para remover a porca do pino. 8. Remova o pino do diafragma e a mola.
Figura 35. Reguladora de pressão
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
38 / 43
AJUSTE DA REGULADORA DE PRESSÃO Utilize os seguintes passos para montar e ajustar
a reguladora de pressão:
ATENÇÃO
Não utilize solventes para limpar o diafragma.
Ele é um composto de borracha e poderá deteriorar-se.
1. Instale a mola do pino. 2. Verifique se a superfície de vedação do pino
está livre de sujeiras, riscos ou contaminação. Instale o pino. 3. Inspecione a superfície da área de assentamento do pino antes de instalar a porca do pino. A superfície deve estar livre de sujeira,
poeira, riscos e contaminação. Certifique-se de que o anel de vedação esteja em boas condições. Não reutilize anéis de vedação partidos ou ressecados. 4. Verifique o diafragma quanto a furos, deformação excessiva em função de sobrecarga
ou sujeira. Insira o diafragma. (Veja alerta acima).
5. Insira a mola e o guia da mola. 6. Monte a tampa do diafragma.
7. Aplique uma pequena quantidade de composto fixador (Loctite 222 ou equivalente) nos parafusos da tampa e instale os quatro parafusos e faça o fechamento apertando em cruz. 8. Instale o parafuso de ajuste na tampa do
diafragma e ajuste a pressão da reguladora de acordo com procedimento abaixo:
a. A tampa do módulo transdutor deve ser
apertada firmemente. Verifique se não ocorrem
vazamentos de ar.
b. Tampe a porta de exaustão com um tampão
de 1/8-27 NPT. Verifique a existência de
vazamentos de ar e repare-os.
c. Conecte o ar de alimentação ao
posicionador. O instrumento deve ser calibrado
com uma pressão de alimentação de 80 psig.
d. Remova o parafuso de ajuste e aplique uma pequena quantidade de composto fixador no
parafuso (Loctite 222 ou equivalente).
e. Instale o parafuso de ajuste e regule a saída para obter uma pressão de 22 ± 1 psi.
f. Desligue o ar de alimentação e remova o tampão de 1/8-27 NPT da porta de exaustão, reinstale o silenciador e verifique o funcionamento.
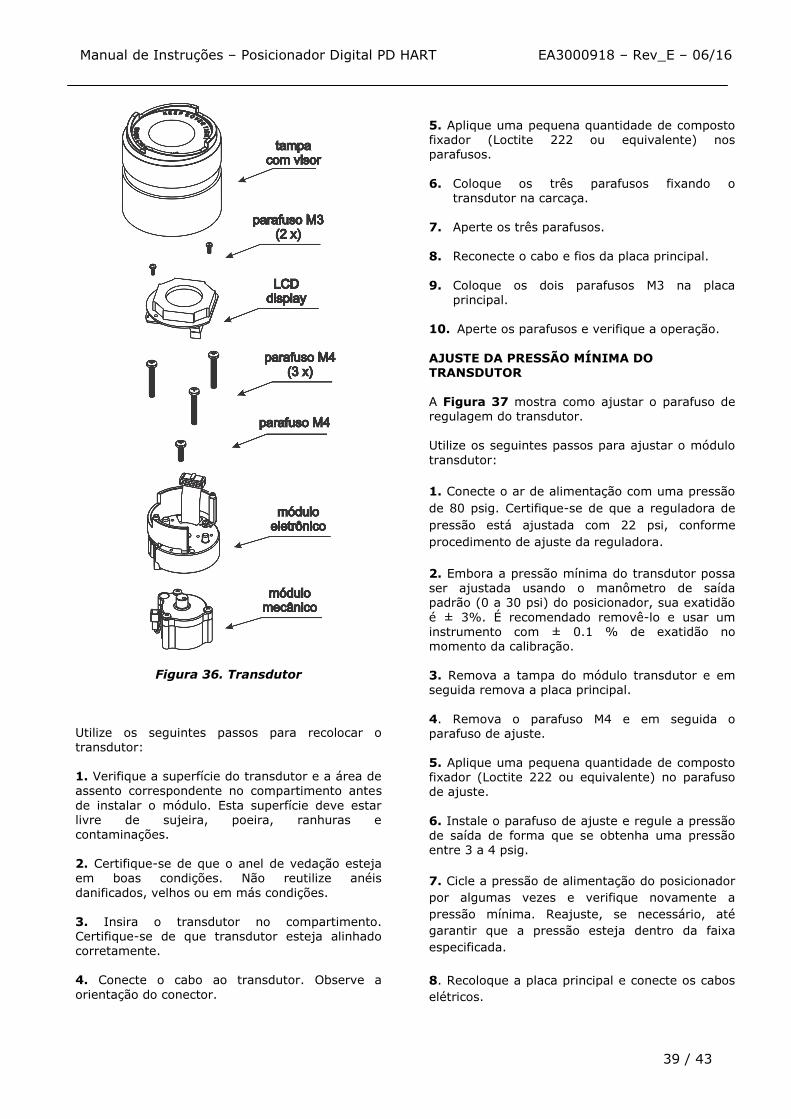
10.5 Transdutor
A Figura 36 mostra o transdutor. Utilize os seguintes passos para remover o
transdutor:
ATENÇÃO Em atmosferas explosivas, remova a alimentação para o posicionador digital antes de
remover a tampa do compartimento de terminais ou a tampa do módulo.
1. Remova o ar de suprimento. 2. Remova a tampa do compartimento do transdutor (veja o alerta acima). 3. Desconecte o cabo de alimentação do
transdutor.
4. Remova os dois parafusos M3 que prendem o display a placa principal. 5. Desconecte os fios e os cabos da placa principal.
ATENÇÃO As placas possuem componentes CMOS que podem ser danificados por descargas eletrostáticas. Observe os procedimentos
corretos para manipular os componentes CMOS. Também é recomendado armazenar as placas de circuito em embalagens à prova de cargas eletrostáticas.
6. Remova os três parafusos M4 que prendem o transdutor a carcaça. 7. Puxe o módulo eletrônico em linha reta para fora do módulo mecânico. Tenha cuidado para não danificar os fios elétricos que saem da carcaça.
8. Remova o parafuso M4. Puxe o módulo mecânico com cuidado do módulo eletrônico.
Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
39 / 43
Figura 36. Transdutor
Utilize os seguintes passos para recolocar o transdutor: 1. Verifique a superfície do transdutor e a área de assento correspondente no compartimento antes
de instalar o módulo. Esta superfície deve estar livre de sujeira, poeira, ranhuras e
contaminações. 2. Certifique-se de que o anel de vedação esteja em boas condições. Não reutilize anéis
danificados, velhos ou em más condições. 3. Insira o transdutor no compartimento. Certifique-se de que transdutor esteja alinhado corretamente. 4. Conecte o cabo ao transdutor. Observe a
orientação do conector.
5. Aplique uma pequena quantidade de composto fixador (Loctite 222 ou equivalente) nos parafusos.
6. Coloque os três parafusos fixando o
transdutor na carcaça.
7. Aperte os três parafusos.
8. Reconecte o cabo e fios da placa principal.
9. Coloque os dois parafusos M3 na placa
principal.
10. Aperte os parafusos e verifique a operação.
AJUSTE DA PRESSÃO MÍNIMA DO TRANSDUTOR A Figura 37 mostra como ajustar o parafuso de regulagem do transdutor. Utilize os seguintes passos para ajustar o módulo
transdutor:
1. Conecte o ar de alimentação com uma pressão
de 80 psig. Certifique-se de que a reguladora de
pressão está ajustada com 22 psi, conforme
procedimento de ajuste da reguladora.
2. Embora a pressão mínima do transdutor possa
ser ajustada usando o manômetro de saída padrão (0 a 30 psi) do posicionador, sua exatidão
é ± 3%. É recomendado removê-lo e usar um instrumento com ± 0.1 % de exatidão no momento da calibração. 3. Remova a tampa do módulo transdutor e em seguida remova a placa principal.
4. Remova o parafuso M4 e em seguida o parafuso de ajuste. 5. Aplique uma pequena quantidade de composto fixador (Loctite 222 ou equivalente) no parafuso de ajuste.
6. Instale o parafuso de ajuste e regule a pressão
de saída de forma que se obtenha uma pressão entre 3 a 4 psig.
7. Cicle a pressão de alimentação do posicionador
por algumas vezes e verifique novamente a
pressão mínima. Reajuste, se necessário, até
garantir que a pressão esteja dentro da faixa
especificada.
8. Recoloque a placa principal e conecte os cabos
elétricos.

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
40 / 43
Figura 37. Ajuste da pressão mínima transdutor
Verificação do ajuste da pressão do módulo transdutor
Para garantir a precisão do posicionador, verifique
a calibração do transdutor após a execução da opção de parâmetro FULL SETUP.
A pressão mínima e máxima registrada no manômetro de 0 a 30 psi deve ser de acordo com
a tabela abaixo.
Ajuste da mola de retorno
A Figura 38 shows the feedback spring adjustment.
1. Certifique-se de que a reguladora de pressão
está ajustada com 22 psi, conforme procedimento
de ajuste da reguladora e que pressão mínima do
transdutor esteja com 4 psi. Desaperte a porca de
trava M8.
2. Através do parâmetro DISP, configure a opção
CRTL. A corrente da bobina sera mostrada em porcentagem.
3. Utilize uma chave de fenda para o ajuste do parafuso da mola de retorno. A corrente da bobina deve estar entre 48 to 52%.
4. Cicle a corrente de entrada do posicionador por
algumas vezes e verifique novamente a
porcentagem de corrente da bobina. Reajuste, se
necessário, até garantir que porcentagem esteja
dentro da faixa especificada.
Figura 38. Mola de retorno
10.6 Módulo mecânico
Através da Figura 39, utilize os seguintes passos para verificação e limpeza do módulo mecânico: 1. Puxe lentamente o módulo eletrônico e o
módulo mecânico irá sair gradualmente da montagem. 2. Remova os três parafusos e retire a carcaça da placa.
3. Remova o parafuso de ajuste da pressão mínima. 4. Remova a palheta. Inspecione se há sujeira, ranhuras e contaminações na face de contato com o bico. Limpe se necessário ou substitua se estiver danificada.
5. Remova o atuador. Verifique se há sujeira ou se está danificado o bico do carretel. Limpe se
necessário ou substitua se estiver danificado. 6. Verifique se o anel de vedação do atuador está em boas condições. Substitua se necessário.
7. Verifique se a área de assento do anel de vedação está livre de sujeira, contaminações ou ranhuras. Limpe se necessário. 8. O parafuso da flange da bobina é montado em
fábrica com composto fixador alto torque, por isso não é necessário removê-lo. Substitua a flange da bobina caso verifique vazamento por esse
POSIÇÃO MANÔMETRO ESCALA 0 A 30 PSI
0% 3 a 4 psi
50% 7 a 9 psi
100% 12 a 15 psi

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
41 / 43
parafuso.
9. Monte todas as peças novamente como mostrado na Figura 39. Observe na vista
explodida a orientação da palheta com a carcaça da placa.
Figura 39. Módulo mecânico
10.7 Diafragma do posicionador
A Figura 40 mostra o diafragma do posicionador. Utilize os seguintes passos para remover o diafragma:
1. Desligue o ar de alimentação. 2. Remova os dois parafusos que prendem o diafragma. 3. Remova o conjunto diafragma.
Figura 40. Diafragma do posicionador
ATENÇÃO
Não utilize solventes para limpar o diafragma. Ele é um composto de borracha e poderá deteriorar-se.
Utilize os seguintes passos para recolocar o diafragma:
1. Para prevenir queda de desempenho do instrumento, verifique a superfície do diafragma e
a área de assento correspondente na base antes de instalar o diafragma. Esta superfície deve estar livre de sujeira, poeira, ranhuras e contaminações. 2. Certifique-se de que o anel de vedação esteja em boas condições. Não reutilize anéis
danificados, velhos ou em más condições. 3. Coloque o diafragma na base. Certifique-se de que esteja alinhado corretamente com os furos. Observe a montagem entre o carretel e a mola plana Figura 41.
4. Coloque os dois parafusos fixando o diafragma na base. 5. Aperte os parafusos e verifique a operação

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
42 / 43
Figura 41. Montagem diafragma e válvula carretel
10.8 Válvula carretel
A Figura 42 mostra a válvula carretel. Utilize os seguintes passos para remover o carretel: 1. Desligue o ar de alimentação.
2. Remova os dois parafusos que prendem o carretel. 3. Remova o carretel.
ATENÇÃO
Não aplique óleo ou graxa no carretel. Esta
superfície deve estar livre de sujeira, poeira,
ranhuras e contaminações.
Figura 42. Válvula carretel
ATENÇÃO
O carretel e o corpo do carretel são pares produzidos em conjunto. Trocar partes pode levar a queda no desempenho ou consumo excessivo de ar.
Utilize os seguintes passos para recolocar o carretel: 1. Para prevenir queda de desempenho do
instrumento, verifique a superfície do carretel e a área de assento correspondente na base antes de instalar o carretel. Esta superfície deve estar livre
de sujeira, poeira, ranhuras e contaminações. 2. Certifique-se de que o anel de vedação esteja em boas condições. Não reutilize anéis
danificados, velhos ou em más condições. 3. Verifique se o carretel está se movimentando livremente no furo do corpo do carretel. Ele deve se movimentar levantando-se uma das extremidades em um ângulo aproximado de 20º
em relação a base quando montado na posição de trabalho. 4. Coloque o carretel na base. Certifique-se de que esteja alinhado corretamente com os furos. Observe a montagem entre o carretel e a mola
plana Figura 41.
5. Coloque os dois parafusos fixando o carretel na base. 6. Aperte os parafusos e verifique a operação.

Manual de Instruções – Posicionador Digital PD HART EA3000918 – Rev_E – 06/16
43 / 43
11. Garantia
A Sense garante os equipamentos e reparos por ela executados e vendidos sob sua marca como livres de
defeitos de materiais e de manufatura em condições normais de serviço e com utilização adequada de acordo com: 1. A garantia de produtos novos é de 12 meses da data de embarque da fábrica da Sense e se aplica para qualquer parte do equipamento aqui descrito e vendido pela Sense. 2. A garantia para produtos revisados é de 6 meses após os reparos realizados na fábrica da Sense ou por
seus autorizados. 3. Os equipamentos deverão ser retornados para Sense com frete pré-pago. 4. A Sense não assumirá garantia por mau uso por parte do comprador, seus empregados ou outros. 5. Se possível, informe as razões do retorno (por exemplo: sintoma da falha, ambiente da instalação etc.)
6. A garantia será anulada se o reparo for executado por pessoal não autorizado pela Sense.
11.1 Retorno de Materiais
Caso seja necessário retornar o Posicionador para avaliação técnica ou manutenção, basta contatar a Sense, informando o número de série do equipamento com defeito, enviando-o para a Sense de acordo com o endereço contido no termo de garantia.
Para maior facilidade na análise e solução do problema, o material enviado deve conter, em anexo, a documentação descrevendo detalhes sobre a falha observada no campo e as circunstâncias que a provocaram. Outros dados, como local de instalação, tipo de medida efetuada e condições do processo são
importantes para uma avaliação mais rápida.