Embed Size (px)
Citation preview
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
2008
[RAMÓN PIEDRAFITA MORENO]
UZ
octubre de 2008
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 2 -
INFORMÁTICA
INDUSTRIAL
CUADERNO DE PRÁCTICAS
RAMON PIEDRAFITA MORENO INGENIERÍA DE SISTEMAS Y AUTOMÁTICA

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 3 -
PRÁCTICA 1
INTRODUCCIÓN A LA PROGRAMACIÓN DE AUTOMATAS.
REDES DE CONTACTOS Y LITERAL
ESTRUCTURADO.
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 4 -
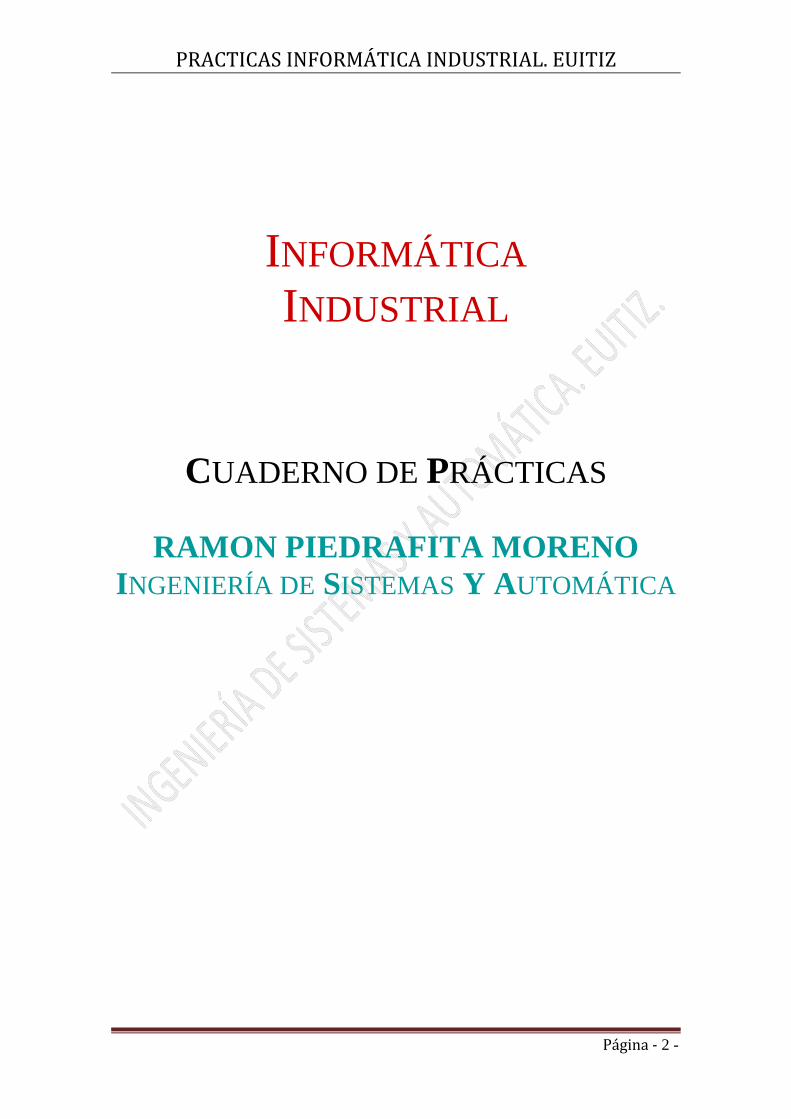
En el grupo Schneider-Electrique, seleccionamos Unity y lanzamos el programa Unity pro. A continuación, para crear una nueva aplicación, presionamos “nueva aplicación” en el menú fichero o sobre el icono respectivo.
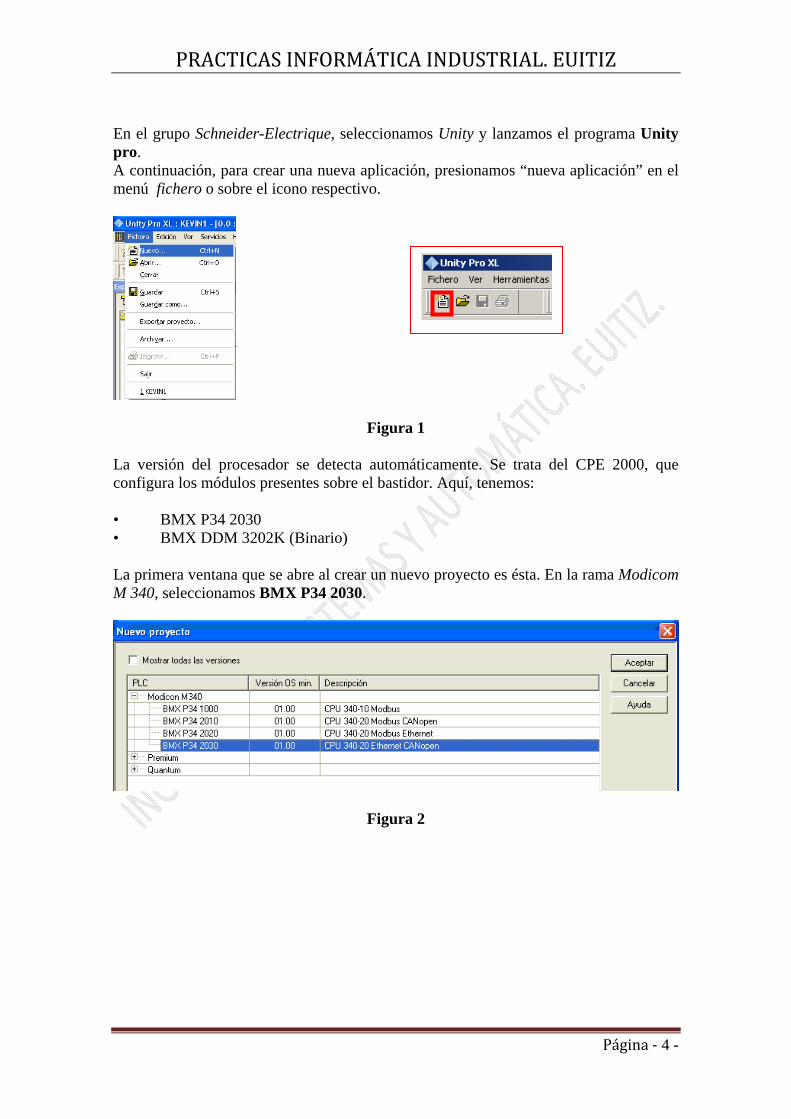
Figura 1 La versión del procesador se detecta automáticamente. Se trata del CPE 2000, que configura los módulos presentes sobre el bastidor. Aquí, tenemos: • BMX P34 2030 • BMX DDM 3202K (Binario) La primera ventana que se abre al crear un nuevo proyecto es ésta. En la rama Modicom M 340, seleccionamos BMX P34 2030.
Figura 2
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 5 -
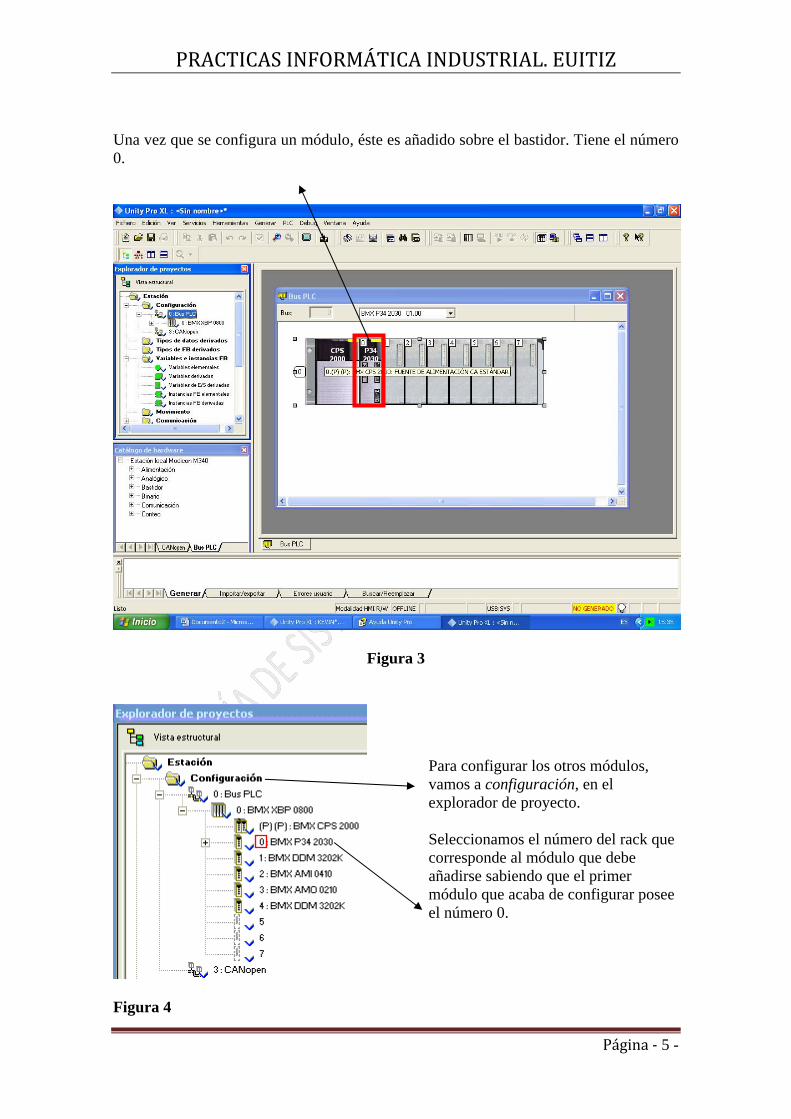
Una vez que se configura un módulo, éste es añadido sobre el bastidor. Tiene el número 0.
Figura 3
Figura 4
Para configurar los otros módulos, vamos a configuración, en el explorador de proyecto. Seleccionamos el número del rack que corresponde al módulo que debe añadirse sabiendo que el primer módulo que acaba de configurar posee el número 0.
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 6 -
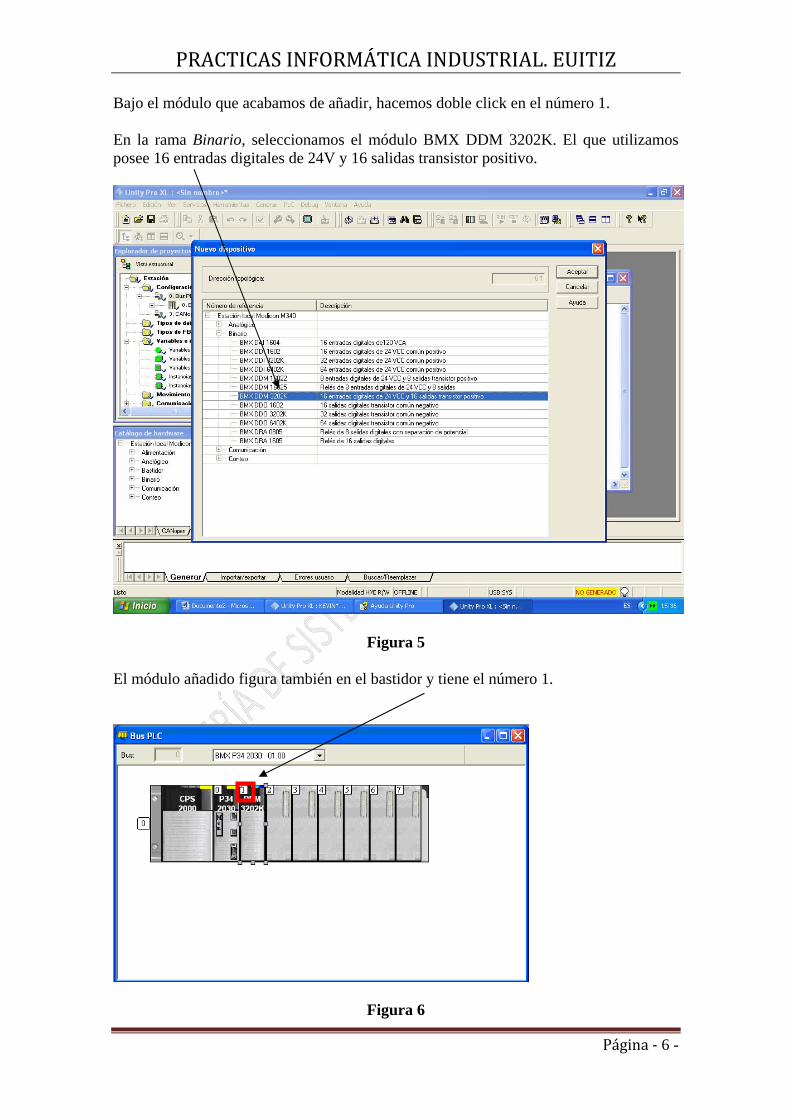
Bajo el módulo que acabamos de añadir, hacemos doble click en el número 1. En la rama Binario, seleccionamos el módulo BMX DDM 3202K. El que utilizamos posee 16 entradas digitales de 24V y 16 salidas transistor positivo.
Figura 5
El módulo añadido figura también en el bastidor y tiene el número 1.
Figura 6

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 7 -
Una vez añadidos todos los módulos, es necesario configurar el tipo de comunicación del autómata. Para ello, seleccionamos el menú PLC, establecer dirección.
Figura 7
Dirección: SYS y Medio de comunicación: USB
Figura 8

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 8 -
Para crear una nueva aplicación, en el navegador de proyecto, vamos a Programa, Tarea, Mast y sección. A continuación, hacemos un click con el botón derecho del ratón y seleccionamos Nueva sección.
Figura 9
Seleccionamos el lenguaje en el que vamos a programar. En este caso, programaremos en LADDER (LD).
Figura 10

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 9 -
Nos aparece una ventana donde vamos a poder introducir los esquemas correspondientes al código en lenguaje de contactos.
Figura 11
Para dibujar el diagrama, utilizamos la barra de herramientas o el botón derecho del ratón donde se encuentran también los símbolos eléctricos.
Figura 12

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 10 -
1)
2)
3)
4)
1234
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 11 -
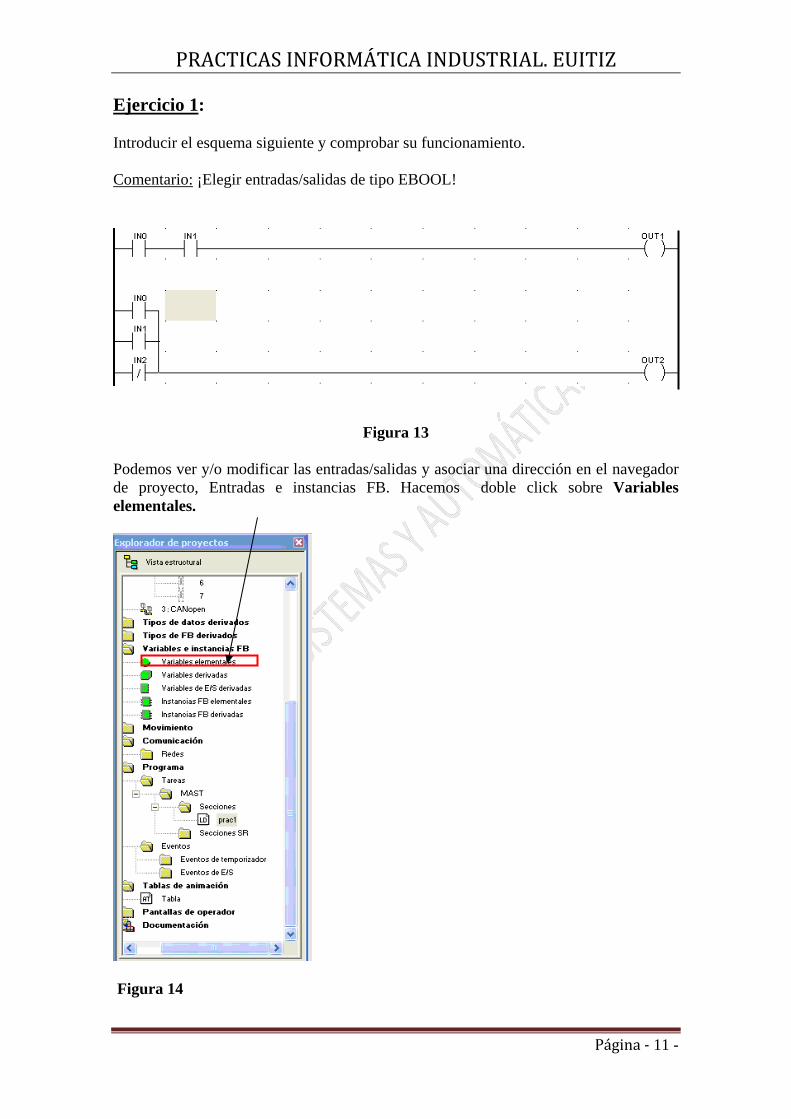
Ejercicio 1: Introducir el esquema siguiente y comprobar su funcionamiento. Comentario: ¡Elegir entradas/salidas de tipo EBOOL!
Figura 13
Podemos ver y/o modificar las entradas/salidas y asociar una dirección en el navegador de proyecto, Entradas e instancias FB. Hacemos doble click sobre Variables elementales.
Figura 14
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 12 -
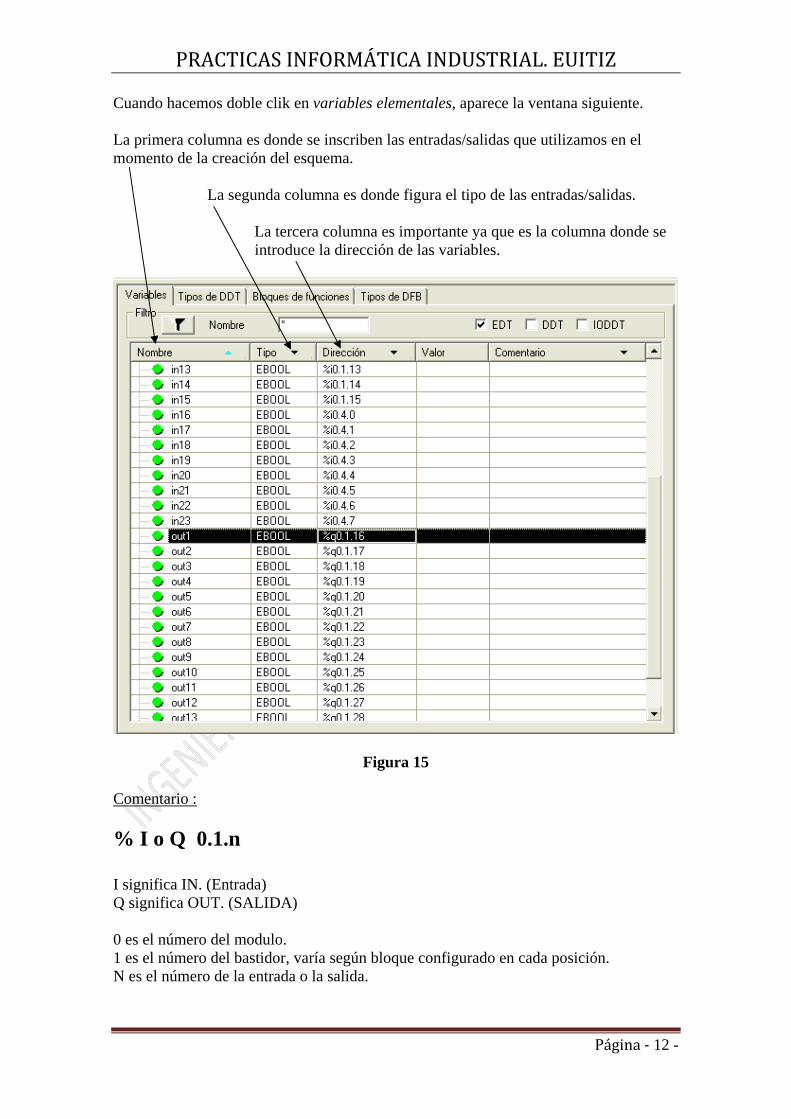
Cuando hacemos doble clik en variables elementales, aparece la ventana siguiente. La primera columna es donde se inscriben las entradas/salidas que utilizamos en el momento de la creación del esquema.
La segunda columna es donde figura el tipo de las entradas/salidas.
La tercera columna es importante ya que es la columna donde se introduce la dirección de las variables.
Figura 15
Comentario : % I o Q 0.1.n I significa IN. (Entrada) Q significa OUT. (SALIDA) 0 es el número del modulo. 1 es el número del bastidor, varía según bloque configurado en cada posición. N es el número de la entrada o la salida.

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 13 -
Antes de probar el programa, hay que analizar el proyecto para ver si existe algún error, y antes de analizarlo, hay que establecer si vamos a trabajar con un autómata físico o vamos a utilizar el simulador. Para ello, en el menú PLC, seleccionamos:
1) Si vamos a utilizar el simulador. En este caso trabajaremos con tablas de animación para modificar las entradas y los resultados serán visibles en el código.
2) Si vamos a trabajar de forma normal, utilizando un autómata con un bloque Téléfast para cambiar manualmente el estado de las entradas, así como visualizar las salidas.
Figura 16
También podemos establecer el modo de funcionamiento en la barra de herramientas, usando los iconos respectivos:
Figura 17
1
2
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 14 -
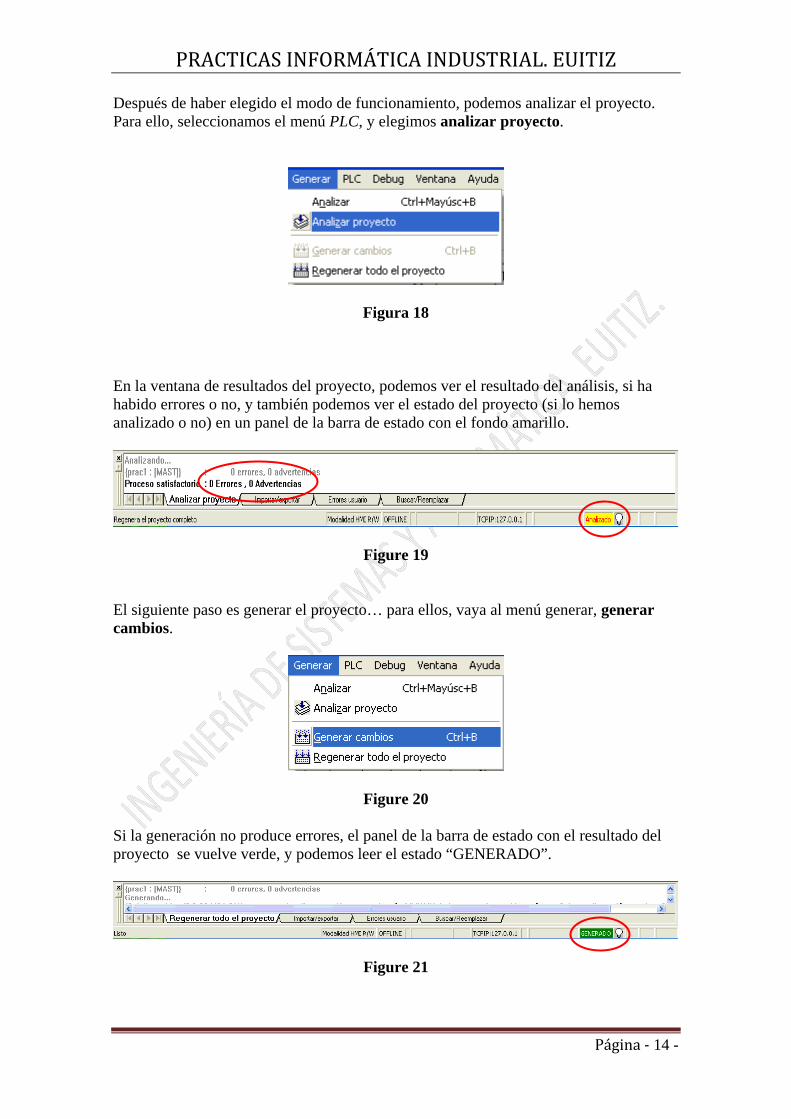
Después de haber elegido el modo de funcionamiento, podemos analizar el proyecto. Para ello, seleccionamos el menú PLC, y elegimos analizar proyecto.
Figura 18
En la ventana de resultados del proyecto, podemos ver el resultado del análisis, si ha habido errores o no, y también podemos ver el estado del proyecto (si lo hemos analizado o no) en un panel de la barra de estado con el fondo amarillo.
Figure 19
El siguiente paso es generar el proyecto… para ellos, vaya al menú generar, generar cambios.
Figure 20
Si la generación no produce errores, el panel de la barra de estado con el resultado del proyecto se vuelve verde, y podemos leer el estado “GENERADO”.
Figure 21

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 15 -
Una vez generado, para pasar el código al autómata, es necesario conectar este. Para ello, vamos al menú PLC, conectar o presionamos sobre el icono asociado.
Figura 22
Cuando hemos conectado, en la barra de estado nos indica que el programa almacenado en el autómata y el programa que tenemos en el proyecto son diferentes, por medio de un panel con el texto “DIFERENTE” sobre fondo rojo.
Figura 23

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 16 -
Esto será la situación habitual, ya que lo normal es que el programa del autómata difiera del programa de nuestro proyecto. Lo que hacemos es transferir al autómata el programa que acabamos de generar. En el menú PLC, seleccionamos transferir proyecto hacia el autómata o presionamos el icono correspondiente.
Figura 24 Al hacer esto, nos aparece la ventana siguiente, y pulsamos en el botón transferir.
Figura 25
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 17 -
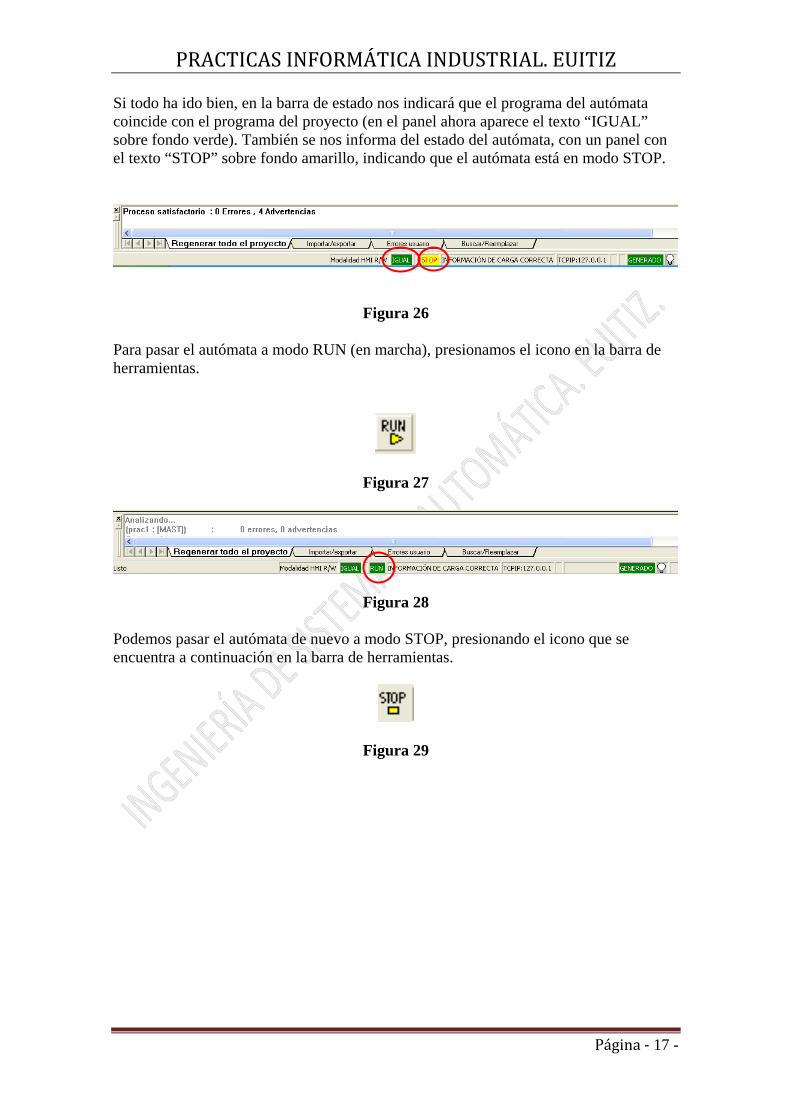
Si todo ha ido bien, en la barra de estado nos indicará que el programa del autómata coincide con el programa del proyecto (en el panel ahora aparece el texto “IGUAL” sobre fondo verde). También se nos informa del estado del autómata, con un panel con el texto “STOP” sobre fondo amarillo, indicando que el autómata está en modo STOP.
Figura 26
Para pasar el autómata a modo RUN (en marcha), presionamos el icono en la barra de herramientas.
Figura 27
Figura 28
Podemos pasar el autómata de nuevo a modo STOP, presionando el icono que se encuentra a continuación en la barra de herramientas.
Figura 29
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 18 -
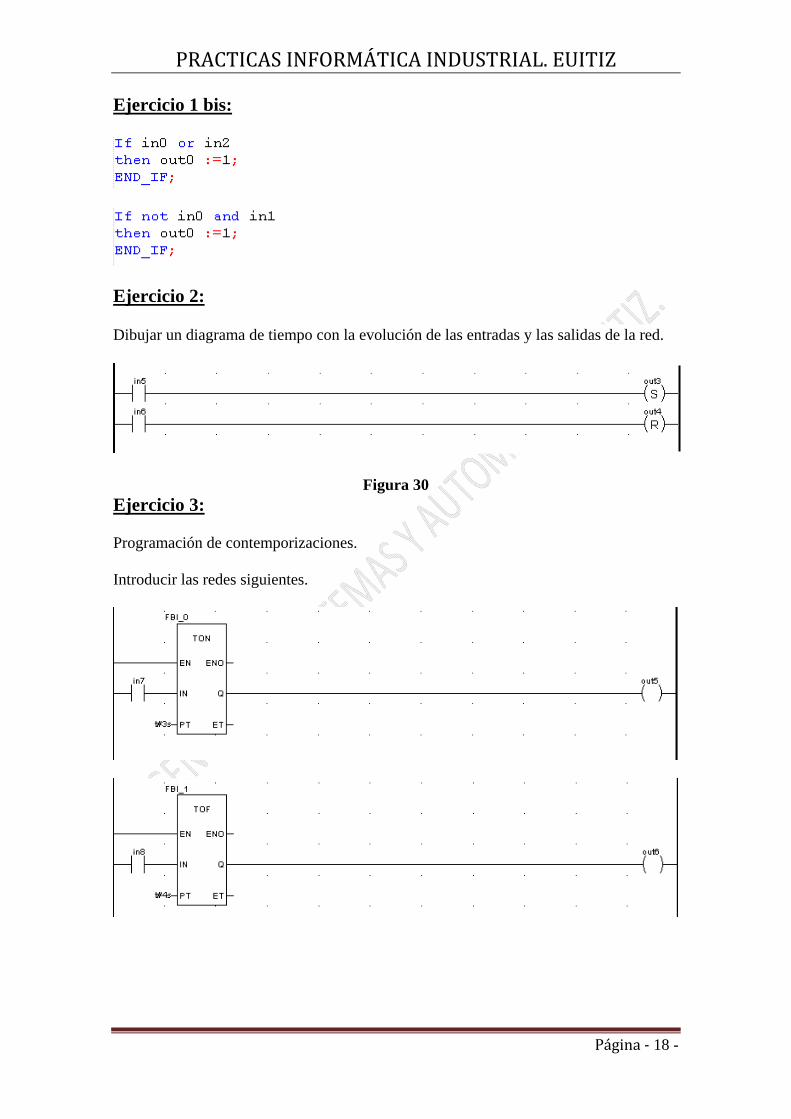
Ejercicio 1 bis:
Ejercicio 2: Dibujar un diagrama de tiempo con la evolución de las entradas y las salidas de la red.
Figura 30 Ejercicio 3: Programación de contemporizaciones. Introducir las redes siguientes.

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 19 -
Figura 31
Para introducir un bloque temporizador, pulsamos este icono en la barra de herramientas, y aparece la ventana siguiente. Para insertar un temporizador, presionamos el botón gris con los puntos suspensivos
Figura 32

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 20 -
Nos aparece esta ventana, y desplegamos la rama conjunto de librerías y a continuación sobre Base Lib.
Figura 33
A continuación, seleccionamos Timers & Counters. Ejercicio 3 bis:
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 21 -
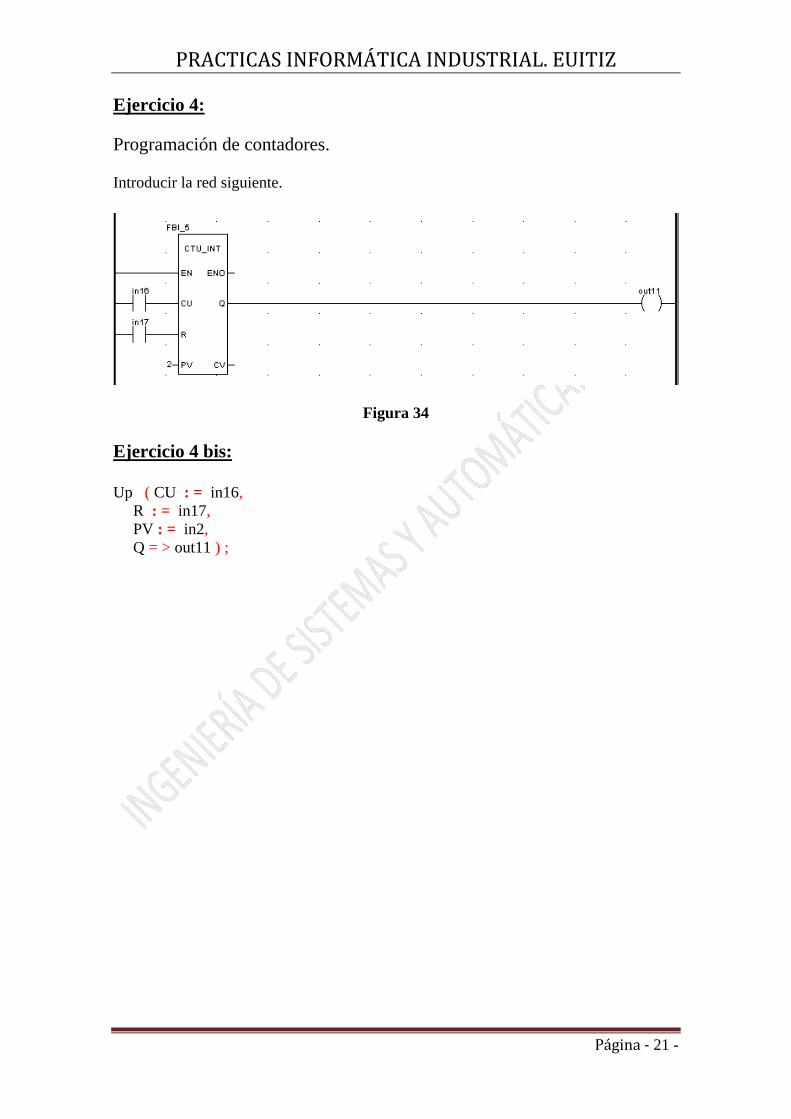
Ejercicio 4: Programación de contadores. Introducir la red siguiente.
Figura 34
Ejercicio 4 bis: Up ( CU : = in16, R : = in17, PV : = in2, Q = > out11 ) ;
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página ‐ 22 -
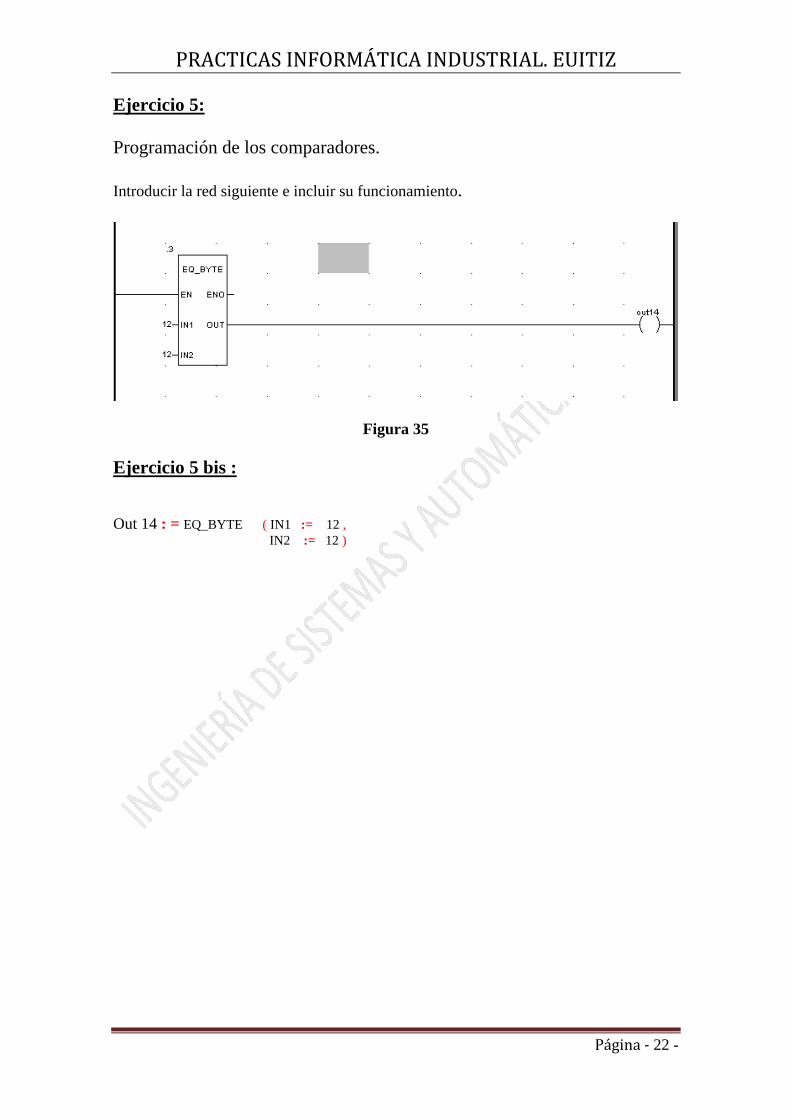
Ejercicio 5: Programación de los comparadores. Introducir la red siguiente e incluir su funcionamiento.
Figura 35 Ejercicio 5 bis : Out 14 : = EQ_BYTE ( IN1 := 12 , IN2 := 12 )

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página 23
PRÁCTICA 2
CONTROL DE SISTEMAS DE EVENTOS
DISCRETOS. INTRODUCCION A LA
PROGRAMACION EN GRAFCET.
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página 24
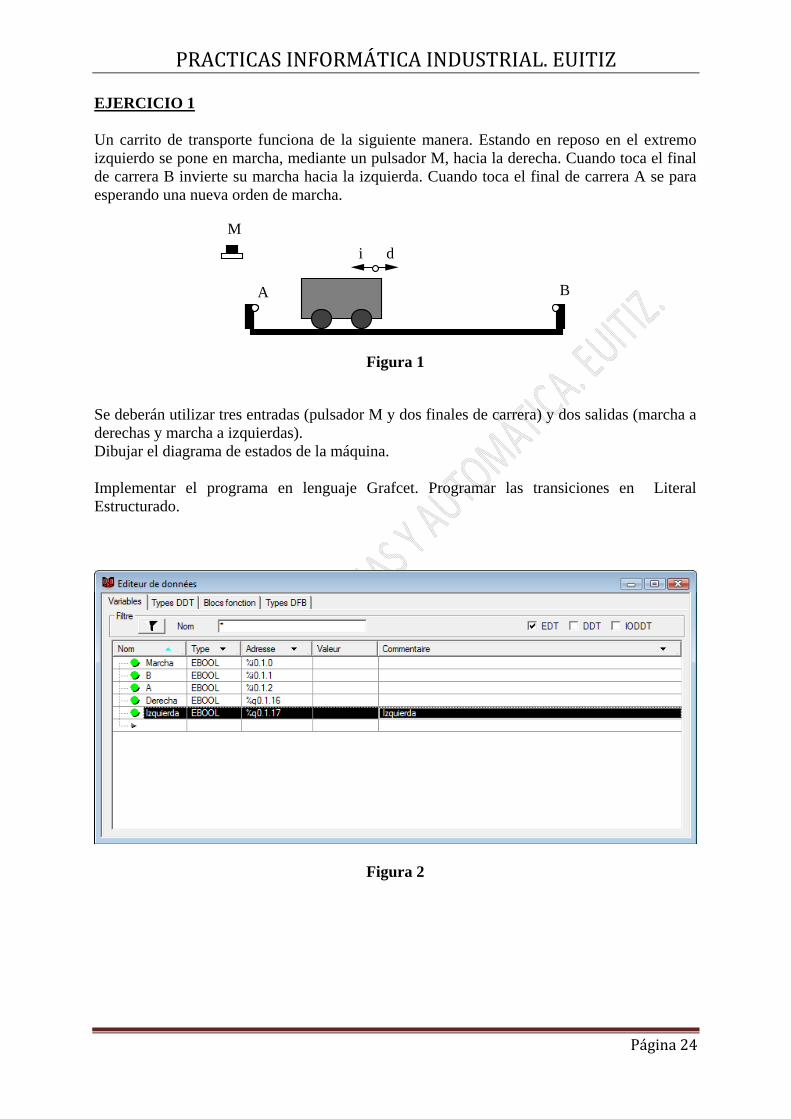
EJERCICIO 1 Un carrito de transporte funciona de la siguiente manera. Estando en reposo en el extremo izquierdo se pone en marcha, mediante un pulsador M, hacia la derecha. Cuando toca el final de carrera B invierte su marcha hacia la izquierda. Cuando toca el final de carrera A se para esperando una nueva orden de marcha.
A B
i dM
Figura 1
Se deberán utilizar tres entradas (pulsador M y dos finales de carrera) y dos salidas (marcha a derechas y marcha a izquierdas). Dibujar el diagrama de estados de la máquina. Implementar el programa en lenguaje Grafcet. Programar las transiciones en Literal Estructurado.
Figura 2

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página 25
EJERCICIO 2 En base al ejercicio anterior se deberá implementar un programa que controle el funcionamiento de dos carritos que funcionan igual que el anterior con la diferencia de que deben esperarse mutuamente en el extremo derecho para poder invertir el sentido de giro. Además deberán esperarse en el extremo izquierdo para realizar un nuevo ciclo debiéndose dar nuevamente la orden de marcha M. Se deberán utilizar 5 entradas (pulsador M y cuatro finales de carrera) y cuatro salidas (marcha a derechas y marcha a izquierdas de cada uno de los carritos).
C D
i d
A B
i dM
Figura 3 Implementar el programa en Lenguaje Grafcet. Programar las transiciones y los acciones en Literal estructurado.
Figura 4
Modificar el programa de manera que una vez los dos carritos han llegado al extremo derecho permanezcan en el 10 segundos antes de retornar. Hacerlo sin añadir ninguna etapa al Grafcet. Programar las salidas en las etapas del grafcet (en lenguaje literal). Configurar la tarea maestra como cíclica, ejecutar el programa. Estimar el tiempo de ciclo del programa Tiempo de ejecución de la tarea maestra.

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página 26
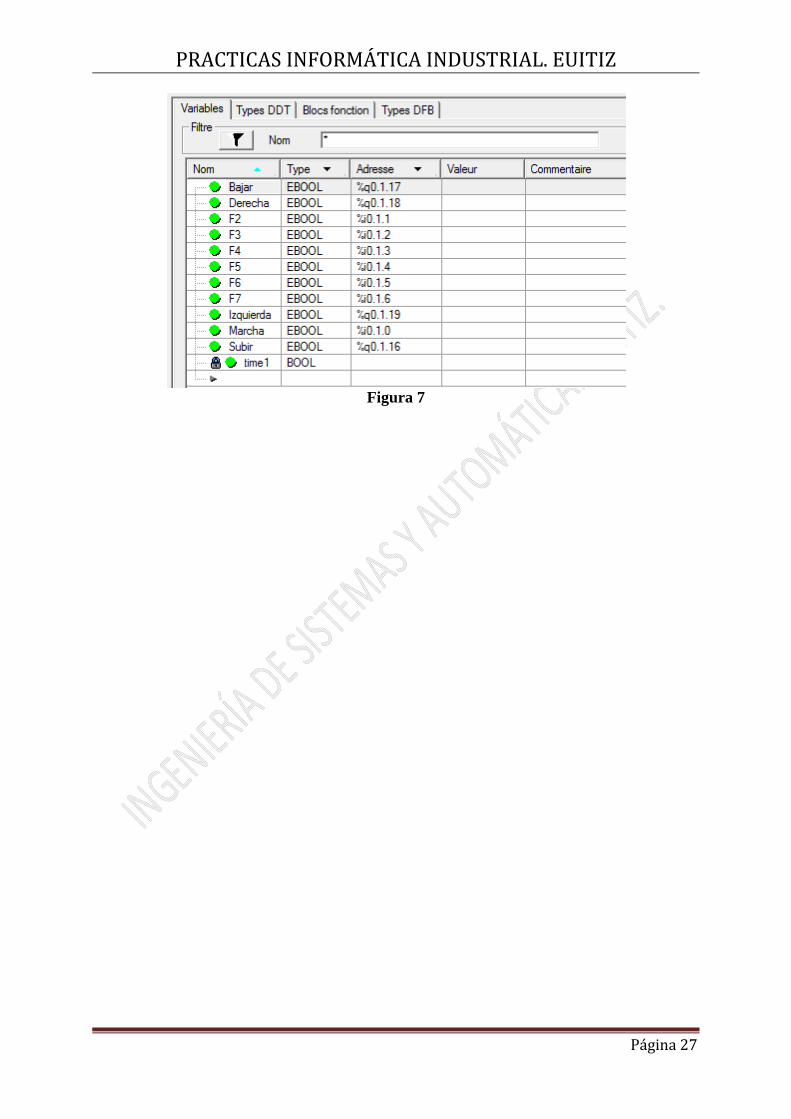
EJERCICIO 3 PROCESO DE ELECTRÓLISIS. Para la realización del siguiente proceso contaremos con: - Dos motores de doble sentido de rotación, uno para el movimiento vertical de la grúa y otro para el movimiento transversal. - Seis finales de carrera (F2, F3, F4, F5, F6 y F7). - Un pulsador de marcha S2. Descripción del proceso. El proceso que se va a describir a continuación consiste en el procedimiento para el tratamiento de superficies, con el fin de hacerlas resistentes a la oxidación. El sistema constará de tres baños: - Uno para el desengrasado de las piezas. - Otro para el aclarado de las piezas. - Un tercero donde se les dará el baño electrolítico. La grúa introducirá la jaula portadora de las piezas a tratar en cada uno de los baños, comenzando por el de desengrasado, a continuación en el de aclarado y por último les dará el baño electrolítico; en este último, la grúa debe permanecer un tiempo determinado para conseguir una uniformidad en la superficie de las piezas tratadas. En la siguiente figura se ilustra el proceso a automatizar.
Figura 5 Realizar el programa en lenguaje Grafcet.
PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página 27
Figura 7

PRACTICAS INFORMÁTICA INDUSTRIAL. EUITIZ
Página 28
EJERCICIO 4 Implementar el GRAFCET que controle la máquina de taladrado.
Cilindro 1
Cilindro 2
final de carrera c2s
final de carrera c2i
final de carrera c1d
TaladroT
C1D C1I
CIAR
C1AB
Presostato P
PIEZA
pulsadorM
Figura 8 Una vez colocada la pieza en la máquina , el operario da al pulsador de marcha . En ese momento el cilindro 1 se desplaza hacia la derecha . Una vez el presostato P detecta que la pieza esta suficientemente presionado, el cilindro 2 se desplaza hacia abajo y el taladro empieza a girar. Cuando el taladro toca el final de carrera c2i , indica que la pieza ha sido ya taladrada y el cilindro 2 debe efectuar el retorno hacia arriba , hasta tocar el final de carrera c2s y el taladro debe pararse. A continuación el cilindro 1 inicia el retorno hacia izquierda hasta tocar el final de carrera c1d. Realizar el programa en lenguaje Grafcet.
Figura 9
C2A
C2A